Submitted:
27 November 2023
Posted:
27 November 2023
You are already at the latest version
Abstract
This paper addresses a mode-dependent state-feedback H∞ control for descriptor hybrid systems, considering both the absence and presence of actuator saturation. Firstly, the necessary and sufficient conditions for the stochastic admissibility criterion with H∞ performance ? of the closed-loop system is proposed. Given the proposed non-convex condition, the author reformulates it into linear matrix inequalities (LMIs). Then, to extend the result to the systems with actuator saturation, the actuator saturated control input is expressed as a linear combination of given state-feedback control input and a virtual control input that remains under the saturation level. To verify this expression, the set invariant condition is also suggested by using the singular mode-dependent Lyapunov function candidate. Therefore, the LMI conditions for the existence of the mode-dependent state-feedback H∞ control and the ellipsoidal shape of invariant set are successfully derived. Two numerical examples demonstrate the effectiveness of the proposed approach in optimizing H∞ performance $\gamma$ and identifying the largest invariant set.
Keywords:
descriptor systems
; hybrid systems
; stochastic systems
; H∞ control
; input saturation
; set invariant
1. Introduction
In the field of control theory, researches have focused on the analysis of system stability and the design of controllers using state-space equations [1,2,3]. Linear systems, being the most fundamental form, have been extensively investigated due to the ease of obtaining numerical solutions to problems [4,5,6]. Hence, researchers have sought to represent real-world systems through variations of linear systems. One well-known example is the descriptor system, also referred to as a generalized state-space system. The descriptor system is characterized by having only some parts of the state vector described by differential equations, while the remaining components are determined by algebraic equations based on the interrelations of the state vector [7,8,9]. To represent the differential and algebraic equations of the system state in a single form, a square matrix of order n is utilized, where n represents the length of the state vector. This square matrix is used to identify the part of the states having the differential equations. Therefore, its rank is equal to the number of differential equations in the state vector, which is always smaller than n. While the advantage of expressing both dynamic and static characteristics of the system in a single form exists, the presence of a singular matrix introduces challenges in system analysis, necessitating additional considerations compared to regular systems.
On the other hand, hybrid systems have also garnered significant attention over the past few decades. Hybrid systems represent systems undergoing changes in both continuous and discrete time properties. An example is the stochastic jump system, representing cases where continuous-time systems experience sudden changes in system parameters due to stochastic processes [10,11,12]. Systems possessing the characteristics of both hybrid systems and descriptor systems are known as descriptor hybrid systems (DHSs). Due to the advantage of DHS that can express both abrupt changes on the descriptor systems, it can be used to express various phenomena such as DC motor systems undergoing random load changes and grid systems with network structures [13,14,15]. For the analysis of DHS in the field of control theory, studies on deriving stochastically admissible conditions and researches on controller and filter design have progressed over the past several decades. The authors of the paper [16] presented the stochastic admissibility conditions for DHS in strict linear matrix inequalities (LMIs). In the context of such research, results on controllers and filters for continuous-time DHS also exist [17,18,19]. Among them, [17] and [18] proposed necessary and sufficient conditions for the existence of state feedback controllers and dynamic output feedback controllers for DHS.
On the other hand, as the presence of disturbances in real world is inevitable, controllers and filters have been extensively researched both theoretically and practically [20,21]. In its theoretical approach, finding optimal control or filter has been one of attractive topics [22]. In the view of optimal control, LMIs have been widely employed due to their ease in finding optimal solutions. In the case of control for DHSs, research usually started from the stochastic admissibility criterion with performance [23,24,25]. This criterion, if both necessary and sufficient, is commonly referred to as the bounded real lemma [26]. The bounded real lemma defines an upper bound on the ratio of the norm between the desired output and the disturbance, referred to as performance , and aims to minimize this value since it can minimize the worst-case impact of disturbances. Generally, the desired output depends on both the system state and external disturbance. For linear DHSs, [24] first presented necessary and sufficient conditions for the bounded real lemma of DHS with disturbance-affected desired output in LMI form. Previous studies have mainly dealt with optimal control and filter for DHSs with disturbance-unaffected desired output [25,27] or provided only sufficient conditions for the existence of control in cases with disturbance-affected desired output [25,28]. This implies that there is still a room for improvement in the control for DHS with a general desired output, serving as one of the motivations for this study.
Another motivation for this study is the need to investigate control for DHSs experiencing input saturation. In practical situations, the actuator in every control system has its limits, which result in input saturation [29]. It is known that the input saturation can lead to performance degradation or even instability in the system. To ensure the stable operation of a control system under input saturation, it is necessary to design controllers that guarantee stability in the presence of saturation phenomena. The input saturation in hybrid systems [30,31] or in descriptor systems [32,33] has been addressed through various studies. Recent research for DHSs with input saturation is covered in the papers [34,35]. However, to the best of the author’s knowledge, no prior research has addressed the combined aspects of control and actuator saturation for DHSs. Therefore, this serves as an additional motivation for this study.
This paper addresses the synthesis problem of control for DHSs both absence and presence of actuator saturation. First, the author assumes that only the states governed by differential equations, i.e., those with dynamics, are considered controllable. Thus, a structure for differentiable state-feedback control is proposed. Then, by utilizing the closed-loop system with the proposed control, the stochastic admissibility criterion with performance is derived. As the proposed criterion is a non-convex formula, challenging to solve directly, the equivalent condition is suggested in terms of LMIs. Then, this paper extends its focus to DHSs with actuator saturation. By introducing a virtual control input, structured similarly to the proposed control and remaining within the saturation level, the closed-loop system is successfully reformulated as a linear DHS even in the presence of the actuator saturation. Since an assumption about the range of states for this expression is required, a set invariant condition is also examined. By accounting for the structure of the state-feedback control, the ellipsoidal shape of the set invariant is obtained, with dimensions matching the number of components corresponding to states with differential equations. Since both control and actuator saturation phenomena are considered, the results can address two optimization problems: 1) Finding the optimal performance , and 2) Identifying the largest invariant set, representing the set of initial states ensuring stochastic convergence to zero. The effectiveness of the proposed approach is demonstrated through two numerical examples, illustrating the optimization results for both scenarios.
The notations used in this paper are standard. For a vector x or matrix X, the superscript T denotes its transpose. For symmetric matrices X and Y, the notation signifies that is semi-positive (positive) definite. For any square matrix X, the symbol . The matrix I denotes the identity matrix with appropriate dimensions, and represents the identity matrix with dimensions . For matrix X, the notation specifies the -th component. Similarly, for vector x, the notation denotes the i-th component. The vector indicates a unit vector with a single nonzero element at the i-th position, i.e., . For symmetric matrices, the symbol serves as an ellipsis for terms induced by symmetry.
2. Problem Statements
Consider the following descriptor hybrid systems:
where the notations denote the system state, control input, desired output, and external disturbance, respectively. The matrix is a square matrix whose rank is smaller than its dimension, i.e., . The notation denotes a continuous-time Markov process defined on a probability space with outcomes in a finite set . The mode transition rate of the Markov process from mode i to mode j is defined as . Subsequently, the mode transition probability from mode i at time t and mode j at time are defined as follows:
where and . The transition rate matrix can be defined as , where , for and . To simplify the notations, the mode-dependent matrices at will be represented by using subscript i, i.e.,
Also, to prevent issues arising from the singularity of matrix E, let us define of full-column matrices which hold the following properties regarding the singular matrix E:
Then, by using the matrices in (5), we will use the following lemma.
Lemma 1.
[36] For a symmetric matrix which satisfies , and an of full-rank matrix , the term is of full-rank, and its inversion can be expressed as follows:
where and defined as
The objective of this study is to analyze the DHS with disturbances and synthesize a state-feedback control that is robust to disturbances and actuator saturation. Therefore, the ensuing lemma and definition are employed in the next section to analyze the system with disturbances.
Definition 1.
Lemma 2.
To synthesize a mode-dependent state-feedback control for DHSs, let us contemplate the following structure:
where is a mode-dependent control gain to be determined. Then the closed-loop system (1)-(2) with the control input (11) is defined as
This paper serves two main objectives. Firstly, it aims to determine the control gains that satisfy the stochastic admissibility criterion with performance for the closed-loop system (12)-(13). Secondly, the focus is on finding control gains that still valid under the actuator saturation phenomena in the system (1)-(2). When the DHS (1)-(2) has actuator saturation, it can be represented as follows:
The symbol denotes the saturation operator such that
where is a saturation level. Although saturation is a common phenomenon, it induces nonlinearity even when the input signal maintains linearity. To address this issue, the subsequent representation will prove to be beneficial.
Lemma 3.
[38] For any state , the saturated control input can belong the following convex-hull:
The set is a set of states where every component the vector is less than the saturation level, i.e., . The notation denotes the convex hull, and the matrix denotes a diagonal matrix whose diagonal elements have all possible combination of 1 and 0, and .
With the help of Lemma 3, the term in (14)-(15) can be expressed as follows for the states belonging to :
where holds the following property:
Utilizing the aforementioned lemmas, the following section will present two theorems aimed at determining the control gains under conditions of both absence and presence of actuator saturation.
3. Main Result
In this section, the conditions for the existence of control gains for the closed-loop system to be stochastically admissible with performance will be presented. Firstly, by applying the closed-loop system (14)-(15) to Lemma 2, the stochastically admissibility with performance of the closed-loop system (12)-(13) is ensured if and only if there exist the solutions such that for all
However, finding the solution for (20)-(21) is challenging due to the variable coupled term in (21). To address this challenge, the following theorem presents an equivalent condition for (20)-(21) in terms of strict linear matrix inequalities.
Theorem 1.
The assurance of the existence of solutions and for the conditions (20)-(21), representing the stochastic admissibility criterion with performance γ for the closed-loop system (12)-(13), is established if and only if there exist matrices , , , for all , satisfying the following linear matrix inequalities:
Proof.
Firstly, let us define the inversion of in (22) by using Lemma 1:
where and satisfy the following conditions:
Then the condition (20) is equivalent to (23) through the relation (29). Next, to reformulate the condition (21) as (24), we will employ the following full-rank matrix:
Then we can apply the congruence transform to (21) using the matrix in (31):
Taking into account the properties and , the condition (32) transforms into the proposed condition (24) by putting
and applying Schur complement. The proof is complete.
Remark 1.
The control gain in the mode-dependent state-feedback control (11) can be determined through the following relation:
where are the solutions of Theorem 1.
Remark 2.
The synthesis problem of control for DHSs has been under considered for several decades. However, before the introduction of the new bounded real lemma for DHSs with disturbance affected output (2) (Lemma 2), the existing research focused on establishing the sufficient conditions of controllers or exclusively examined scenarios with disturbance-unaffected output, i.e., in (2). Hence, it is noteworthy to emphasize that Theorem 1 provides the necessary and sufficient condition of the controller (11), ensuring the stochastic admissibility of the closed-loop system with the proposed controller (11) under disturbance-affected output.
The next topic involves deriving the condition to determine control gains considering actuator saturation. Therefore, let us define the following closed-loop system with saturated control input :
By utilizing the formula (18), an alternative representation of the saturated input, the closed-loop system (36)-(37) can be expressed as follows:
since . By applying the closed-loop system (38)-(39) into Lemma 2, the criterion for stochastic admissibility with performance for the closed-system (38)-(39) is obtained as follows: for all
where is defined in (22). This representation is valid only for the states within the set . To ensure that the range of states belongs to the set , we need to consider a set-invariant condition for the set . Before deriving it, let us define an ellipsoid using the condition (42):
Utilizing the ellipsoid, the set invariant condition for the and the equivalent condition of (42)-(43) are provided in the following theorem.
Theorem 2.
Proof.
Firstly, let us establish the set invariant condition for the set . If the ellipsoid (44) is within the linear region , the expression for the saturated input (18) is valid for states within the ellipsoid. Therefore, we can derive the following set invariant condition: for all ,
which is equivalent to
The condition (49) is equivalent to the following inequality:
where is defined in (25). By utilizing the property , the condition (50) concludes to the following inequality:
by putting . Applying Schur complement to (51) leads to the proposed condition (45), considering the full-column rank .
Remark 3.
Remark 4.
To achieve a less conservative result in terms of performance, the minimal γ can be determined by solving an optimization problem that minimizes while satisfying LMIs suggested in Theorem 1 or Theorem 2.
Remark 5.
With the aid of Lemma 3, the saturated input can be expressed as a linear combination of two state feedback controls: and . This enables us to consider the closed-loop system as a linear system even when subjected to actuator saturation. However, this alternative representation is only valid for states belonging to the given set . Therefore, the set-invariant condition is proposed in (45). It implies that only the initial states within the invariant set in (44) are guaranteed to stochastically converge to zero. Therefore, maximizing the area of the invariant set is an essential issue. The largest invariant set can be found by solving an optimization problem that maximizes α subject to:
where is the component to express the region of initial states, i.e., . The condition (56) is equivalent to
and it can be expressed as the following LMIs after applying Schur complement:
where .
4. Numerical Example
In this section, two numerical examples are considered to demonstrate the effectiveness of the proposed mode-dependent state-feedback control with actuator saturation.
Example 1.
Consider the following DHS with input saturation (14)-(15) with following parameters:
The mode transition rate matrix is defined as
and the matrices and S for the matrix E are defined as follows:
Figure 1 shows the state trajectories for the unforced case, i.e., . It indicates that the DHS with the given system parameters is unstable. To render the closed-loop system stochastically admissible, control input derived from Theorem 2 is applied. In this example, we solve an optimization problem that minimizes in Theorem 2, and the following control gains with minimal are obtained:
Figure 1.
The unforced response of systems in Example 1.
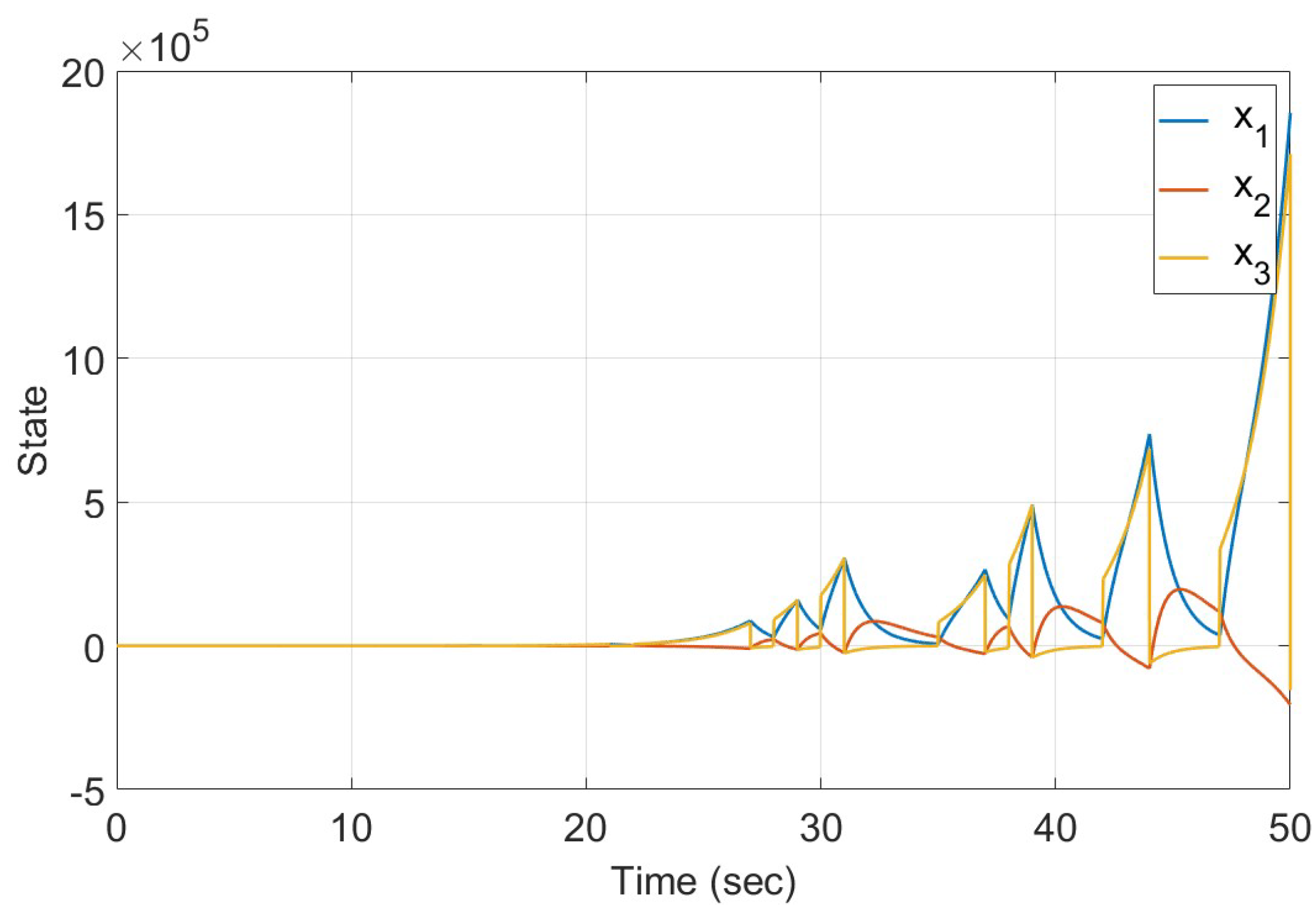
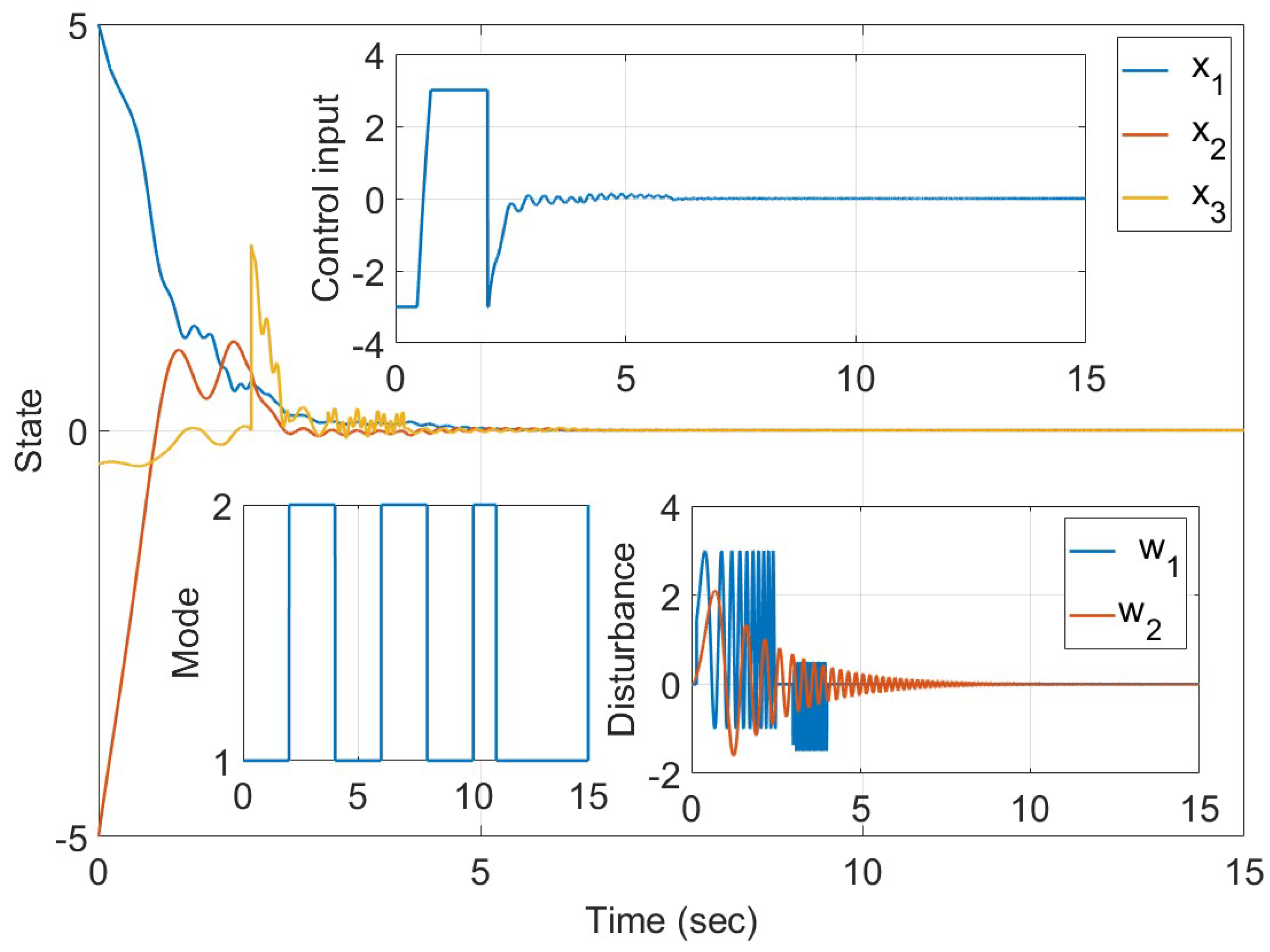
Figure 2.
The state trajectories, mode evolution and control input of the closed-loop system in Example 1.
Figure 2.
The state trajectories, mode evolution and control input of the closed-loop system in Example 1.
Example 2.
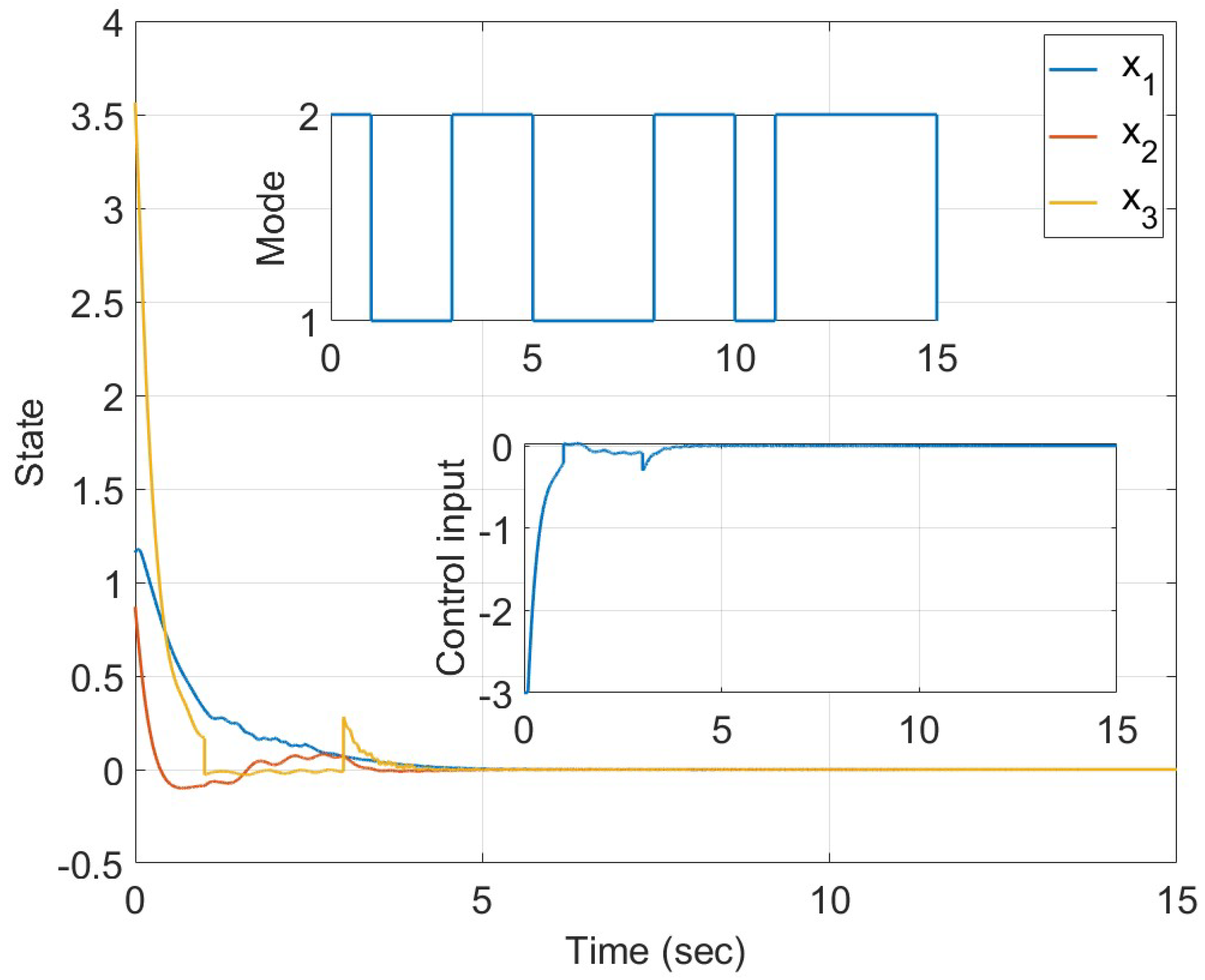
In this example, the DHS with the same system parameters as in Example 1 is considered. We solve an optimization problem to minimize in Remark 5 subject to (55)-(56). The original goal of this optimization problem is to maximize α in (56). Instead of maximizing α, we consider the minimization problem of . By solving the LMIs in Theorem (2) via the optimization problem, the solutions of are obtained. Then, using the relation , we can determine the largest invariant set. Figure 3 shows the region of attraction obtained from the ellipsoids , and the state trajectories starting from the boundary of the ellipsoids successfully converge to zero. Figure 4 shows the state trajectories over time, the control input and the mode evolution. In this simulation, the disturbance is considered to be 1/10th of the scale of Example 1.
5. Conclusions
This paper considered the mode-dependent state-feedback control for DHSs, considering both the absence and presence of actuator saturation. Firstly, we established the necessary and sufficient condition for the stochastic admissibility criterion with performance of the closed-loop system using the proposed non-saturated control input. Since the proposed condition was expressed as a non-convex formula, we reformulated it into the LMIs. Next, we extended our result to the closed-loop system with actuator saturation, expressing it as DHSs with linear state-feedback control inputs through the introduction of a virtual control input that always remains under the saturation level. To verify this expression, the set invariant condition was also considered. By utilizing the singular mode-dependent Lyapunov function candidate, we suggested the ellipsoidal shape of invariant set, and provided a method to determine the largest invariant set. Two numerical example demonstrated the effectiveness of the proposed approach concerning the optimal performance and the largest invariant set.
References
- Chow, S.M.; Ho, M.h.R.; Hamaker, E.L.; Dolan, C.V. Equivalence and differences between structural equation modeling and state-space modeling techniques. Structural Equation Modeling 2010, 17, 303–332. [Google Scholar] [CrossRef]
- Aoki, M. State space modeling of time series; Springer Science & Business Media, 2013.
- Kailath, T. Linear systems; Vol. 156, Prentice-Hall Englewood Cliffs, NJ, 1980.
- Hespanha, J.P. Linear systems theory; Princeton university press, 2018.
- Hendricks, E.; Jannerup, O.; Sørensen, P.H. Linear systems control: deterministic and stochastic methods; Springer, 2008.
- Sun, Z. Switched linear systems: control and design; Springer Science & Business Media, 2006.
- Takaba, K.; Morihira, N.; Katayama, T. A generalized Lyapunov theorem for descriptor system. Systems & Control Letters 1995, 24, 49–51. [Google Scholar]
- Fridman, E.; Shaked, U. A descriptor system approach to H∞ control of linear time-delay systems. IEEE Transactions on Automatic Control 2002, 47, 253–270. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhong, Z.; Basin, M.V.; Zhou, D. A descriptor system approach to stability and stabilization of discrete-time switched PWA systems. IEEE Transactions on Automatic Control 2018, 63, 3456–3463. [Google Scholar] [CrossRef]
- Shi, P.; Li, F. A survey on Markovian jump systems: modeling and design. International Journal of Control, Automation and Systems 2015, 13, 1–16. [Google Scholar] [CrossRef]
- Fei, Z.; Gao, H.; Shi, P. New results on stabilization of Markovian jump systems with time delay. Automatica 2009, 45, 2300–2306. [Google Scholar] [CrossRef]
- Zhao, P.; Kang, Y.; Zhao, Y.B. A brief tutorial and survey on markovian jump systems: Stability and control. IEEE Systems, Man, and Cybernetics Magazine 2019, 5, 37–C3. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, Q.; Yan, X. Analysis and design of singular Markovian jump systems; Springer, 2015.
- Li, F.; Du, C.; Yang, C.; Gui, W. Passivity-based asynchronous sliding mode control for delayed singular Markovian jump systems. IEEE Transactions on Automatic Control 2017, 63, 2715–2721. [Google Scholar] [CrossRef]
- Yao, X.; Park, J.H.; Wu, L.; Guo, L. Disturbance-observer-based composite hierarchical antidisturbance control for singular Markovian jump systems. IEEE Transactions on Automatic Control 2018, 64, 2875–2882. [Google Scholar] [CrossRef]
- Xia, Y.; Boukas, E.K.; Shi, P.; Zhang, J. Stability and stabilization of continuous-time singular hybrid systems. Automatica 2009, 45, 1504–1509. [Google Scholar] [CrossRef]
- Kao, Y.; Xie, J.; Wang, C. Stabilization of singular Markovian jump systems with generally uncertain transition rates. IEEE Transactions on Automatic Control 2014, 59, 2604–2610. [Google Scholar] [CrossRef]
- Kwon, N.K.; Park, I.S.; Park, P.; Park, C. Dynamic output-feedback control for singular Markovian jump system: LMI approach. IEEE Transactions on Automatic Control 2017, 62, 5396–5400. [Google Scholar] [CrossRef]
- Park, I.S.; Kwon, N.K.; Park, P. Dynamic output-feedback control for singular Markovian jump systems with partly unknown transition rates. Nonlinear Dynamics 2019, 95, 3149–3160. [Google Scholar] [CrossRef]
- Gahinet, P.; Apkarian, P. A linear matrix inequality approach to H∞ control. International journal of robust and nonlinear control 1994, 4, 421–448. [Google Scholar] [CrossRef]
- Lee, B.K.; Chen, Y.H.; Chen, B.S. Robust H∞ power control for cdma cellular communication systems. IEEE Transactions on Signal Processing 2006, 54, 3947–3956. [Google Scholar] [CrossRef]
- Başar, T.; Bernhard, P. H∞ optimal control and related minimax design problems: a dynamic game approach; Springer Science & Business Media, 2008.
- Zhou, J.; Lai, H.; Liu, C.; Men, B. H∞ controller design for singular Markov jump systems with time-delays. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering 2022, 236, 1566–1577. [Google Scholar] [CrossRef]
- Park, C.e.; Kwon, N.K.; Park, P. New bounded real lemma for singular Markovian jump systems: Application to H∞ control. International Journal of Robust and Nonlinear Control 2021, 31, 907–919. [Google Scholar] [CrossRef]
- Park, C.e.; Kwon, N.K.; Park, I.S.; Park, P. H∞ filtering for singular Markovian jump systems with partly unknown transition rates. Automatica 2019, 109, 108528. [Google Scholar] [CrossRef]
- Wang, H.S.; Yung, C.F.; Chang, F.R. Bounded real lemma and H∞ control for descriptor systems. IEE Proceedings-Control Theory and Applications 1998, 145, 316–322. [Google Scholar] [CrossRef]
- Wu, Z.; Su, H.; Chu, J. H∞ filtering for singular Markovian jump systems with time delay. International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal 2010, 20, 939–957. [Google Scholar] [CrossRef]
- Kwon, N.K.; Park, I.S.; Park, P. H∞ control for singular Markovian jump systems with incomplete knowledge of transition probabilities. Applied mathematics and computation 2017, 295, 126–135. [Google Scholar] [CrossRef]
- Hu, T.; Lin, Z. Control systems with actuator saturation: analysis and design; Springer Science & Business Media, 2001.
- Shi, P.; Yin, Y.; Liu, F.; Zhang, J. Robust control on saturated Markov jump systems with missing information. Information Sciences 2014, 265, 123–138. [Google Scholar] [CrossRef]
- Liu, H.; Boukas, E.K.; Sun, F.; Ho, D.W. Controller design for Markov jumping systems subject to actuator saturation. Automatica 2006, 42, 459–465. [Google Scholar] [CrossRef]
- Lin, Z.; Lv, L. Set invariance conditions for singular linear systems subject to actuator saturation. IEEE Transactions on Automatic Control 2007, 52, 2351–2355. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, T.; Zeng, C.; Zhou, Z.; Zhang, Q. Simultaneous stabilization for uncertain descriptor systems with input saturation. International Journal of Robust and Nonlinear Control 2012, 22, 1938–1951. [Google Scholar] [CrossRef]
- Ma, Y.; Jia, X.; Zhang, Q. Robust observer-based finite-time H∞ control for discrete-time singular Markovian jumping system with time delay and actuator saturation. Nonlinear Analysis: Hybrid Systems 2018, 28, 1–22. [Google Scholar] [CrossRef]
- Park, C.e.; Kwon, N.K.; Park, P. Output-feedback control for singular Markovian jump systems with input saturation. Nonlinear Dynamics 2018, 93, 1231–1240. [Google Scholar] [CrossRef]
- Uezato, E.; Ikeda, M. Strict LMI conditions for stability, robust stabilization, and H∞ control of descriptor systems. Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No. 99CH36304). IEEE, 1999, Vol. 4, pp. 4092–4097.
- Feng, Z.; Shi, P. Two equivalent sets: Application to singular systems. Automatica 2017, 77, 198–205. [Google Scholar] [CrossRef]
- Cao, Y.Y.; Lin, Z.; Shamash, Y. Set invariance analysis and gain-scheduling control for LPV systems subject to actuator saturation. Systems & Control Letters 2002, 46, 137–151. [Google Scholar]
Figure 3.
The ellipsoid and the state trajectory starting from the boundary of the ellipsoid.
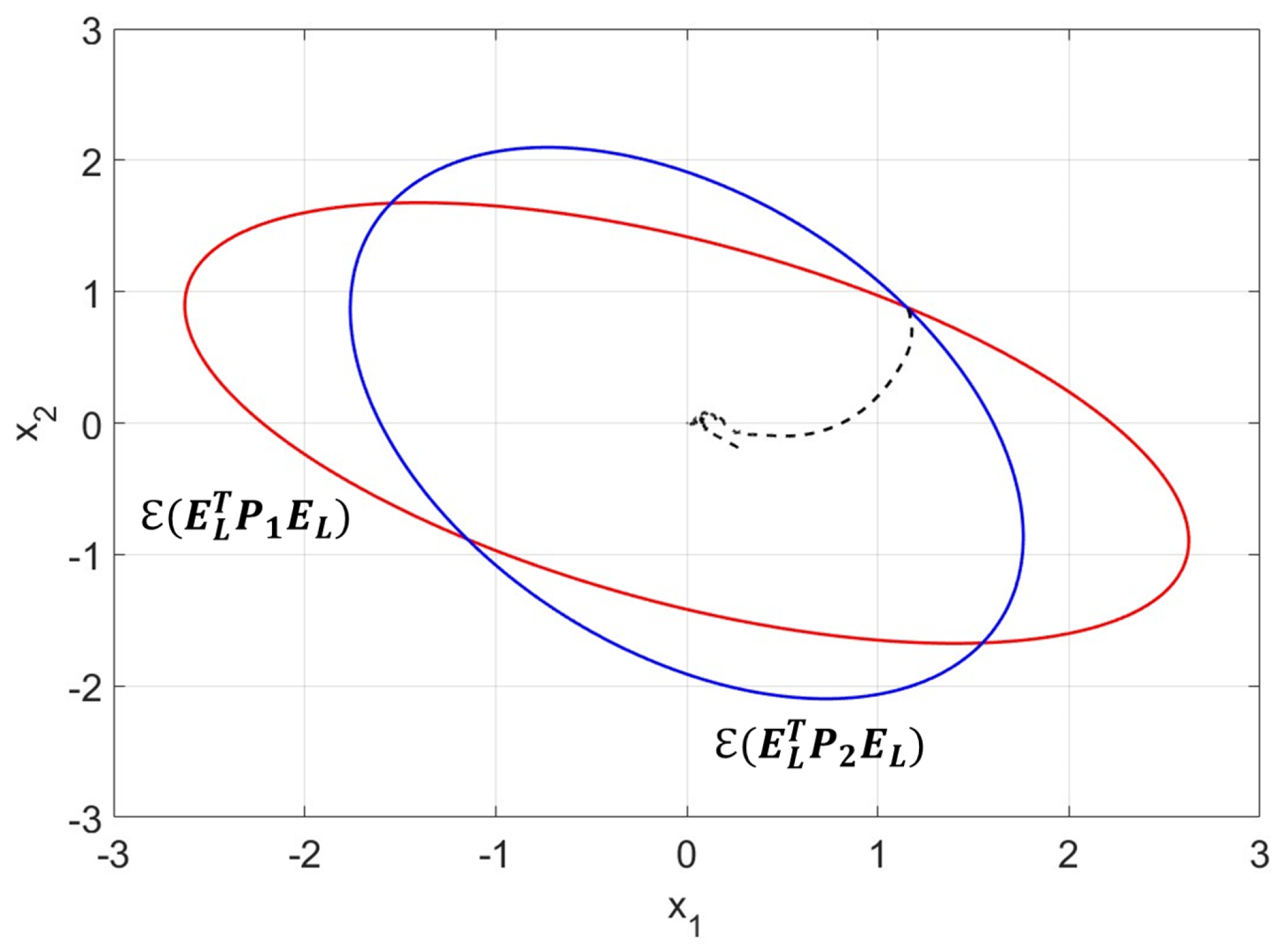
Figure 4.
The state trajectories over time, the control input and the mode evolution of Example 2.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



