Submitted:
03 December 2023
Posted:
04 December 2023
You are already at the latest version
Abstract
This paper will explore analogs of groups formed by the transformations of two ropes as presented by Minh-Tam Quang Trinh.1 The two operations acting on these ropes are T and S, defined as twists and clockwise turns, respectively. These actions intertwine the ropes, creating tangles. T and S also have the ability to untangle the rope when used in certain combinations. In the two-rope case, these actions expressed as a group presentation were shown to be isomorphic to SL2(Z). We explored the analog of these opera- tions, T and S, and conjectured the corresponding group to which they are isomorphic. Partial proofs for this conjecture are included and future work would include proving our conjecture as well as generalizing results to k ropes.
Keywords:
tangles
; isomorphism
; analogs of groups
; matrices
; group presentation
1. Introduction
1.1. Background2
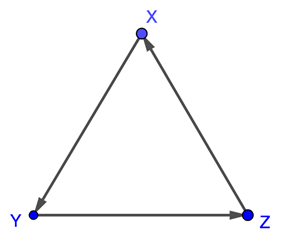
Intertwined ropes are referred to as tangles, and each of their ends as hands. Our research is an extension of the ideas presented by Minh-Tam Quang Trinh, which comes from the last section of John Conway’s paper, “Tangles."
There are two operations that have the ability to “increase or decrease the amount of ‘tangling’ that the ropes exhibit." We define T as the twisting of the two rightmost hands. We also define S to be the counterclockwise rotation of all the hands by .
A "nontangle" is defined as none of the ropes intersecting each other. When starting with a nontangle, there arises an interesting connection between the tangles and the rational numbers for which we will consider the group:
Let I be the identity matrix, and
where we identify with If z is an element of then acts on the set by fractional linear transformations such that
This defines a action on :
Let and be special elements in :
Notice and , so indeed, there is a clear analogy between the twist and turn operations acting on the ropes and the matrices in acting on rational numbers.
1.2. Our Objective
We aim to find the analogues of the groups and where there are three ropes and six hands. Further directions would be the general construction of groups and group actions for the general k ropes and hands case.
2. Finding 3-Rope Analogs for and
2.1. Group Presentation
In the 2-rope case, and have presentations in terms of two specific two-dimensional matrices with determinant 1, and :
where J is central and , and
where T and S are the respective images of and in .
Our first goal was to find analogs of these presentations in the three-rope case. Through manual experimentation, we found that rotating by 60° (or S) six times brought us back to the original configuration, while 30 repetitions of the two rightmost ropes twisting, followed by a 60° rotation (or ), did the same thing.
We then determined the relationship between J and I in our presentation of the analog of . In the two rope case, . This was due to J representing a 180° rotation as and . This can be thought of as treating the ropes as indistinct. In our case, this would be equivalent to a rotation of 120°, where .
Using these relationships our new presentations are:
where J is central and , and
for matrices and in and their respective images, T and S, in .
2.2. Finding S
We would like to find an analogous matrix S to the two-dimensional matrix that satisfies the properties of our group presentation, i.e. To narrow down our search, we took inspiration from the fact that the two-rope scenario could be represented by and supposed that This means that S is a matrix that acts on the three-dimensional vectors. However, since S has order 6, it would be difficult to visualize if we worked with S directly. Hence, we decided to first find a matrix M such that , and from there, all we need to do is take the negative of M and we get our desired S since would equal .
Now that we’ve reduced it down to an exponent of 3, we can visualize M as a matrix that “rotates" the entries of a vector :
 In other words, multiplying by M once gives us Notice that this indeed satisfies because performing three such rotations returns the vector back to its original state. To solve for M, let Then,
which gives us the following system of equations:
These equations must be satisfied for all so if we plug in we get that and Similarly, plugging in and yields and so
and
A quick calculation indeed verifies that
In other words, multiplying by M once gives us Notice that this indeed satisfies because performing three such rotations returns the vector back to its original state. To solve for M, let Then,
which gives us the following system of equations:
These equations must be satisfied for all so if we plug in we get that and Similarly, plugging in and yields and so
and
A quick calculation indeed verifies that
2.3. Finding and T
Having found S, our next step is to find a T that satisfies the property We can first solve for and then multiply by the inverse of S, which exists because giving us T. However, due to the size of the exponent of , we couldn’t solve for it directly. We instead considered an alternative approach.
2.3.1. A Simplified Case
In our attempts to find another method, we explored various cases, including starting with something other than non-tangles. In particular, we looked at the following starting configuration where the ends of each rope are diametrically opposite:
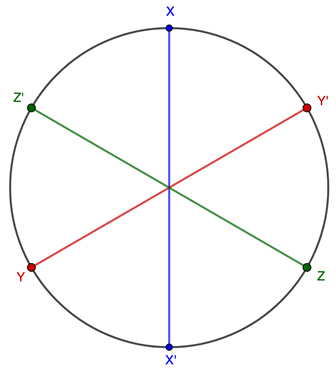 Here, we let S be a clockwise rotation and T be the swapping of the two rightmost points (Z and in the figure above). Through physical experimentation using shoelaces, we found that, using this configuration, we are able to return back to the original state with just five iterations of i.e.
Here, we let S be a clockwise rotation and T be the swapping of the two rightmost points (Z and in the figure above). Through physical experimentation using shoelaces, we found that, using this configuration, we are able to return back to the original state with just five iterations of i.e.
In our search for S, we considered it from the perspective of rotations and cycling the three entries of the vector. Along a similar vein, we attempted to represent what was happening with as a rotation matrix of the 3 dimensional space. We let model a rotation of a plane in by
WLOG, suppose the plane that we are rotating is the -plane. The rotation matrix of the -plane by is
and we can verify that indeed, After setting we have found a satisfying the property we observed.
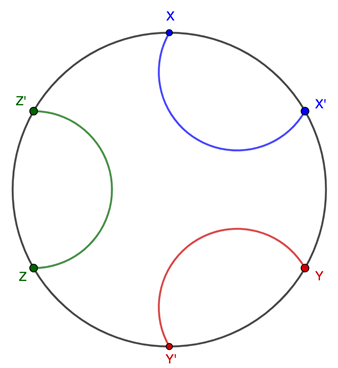
2.3.2. Extending to Our Case
We can extend our findings from the simplified case to our original case where the three ropes start off in a nontangle:
 We found that , meaning we return to the original positioning after 30 iterations of . It follows that we can model as a rotation of the -plane by
We found that , meaning we return to the original positioning after 30 iterations of . It follows that we can model as a rotation of the -plane by
By modifying the angle values of the entries of R in the previous section, we get
Next, we aim to solve for T. We do this by multiplying by the inverse of S. We have
which implies
In conclusion, we have
2.4. Analog of
In the two-rope scenario, it turned out that all the actions lay within since all entries of T and S were integers. We can easily see that such argument fails in our three-rope case, because the entries of our matrix for T are not all integers. This implies that we cannot simply use as the analog to
Hoping to at least preserve a similar structure as we tried to see if a group of the form for some real would work. Based on the entries of our T, we would need
We claim that if we let where is the 60th root of unity, the above condition is satisfied. To show this, first note that and are the real and imaginary parts of the 30th root of unity, respectively, so we can write and
From "On the Ring of Integers of Real Cyclotomic Fields",3 we know that is the ring of integers of the nth real cyclotomic field, i.e. if a real number r can be expressed using only powers of and constants, then We know that and are real numbers. Furthermore, and so both and can be expressed using powers of Therefore, as desired. Hence, our desired analog of is
2.5. Showing Isomorphism
We want to show there is an isomorphism between and our presentation We can do this with a theorem from Jean-Pierre Serre’s “Trees,”4 which states the following:
Theorem 1.
Let G be a group acting on a graph Γ. Let T a segment in Γ be a fundamental domain for Γ mod G. Let P, Q be the vertices of T and be the geometric edge of T. Let , and = be the stabilizers of P, Q and y respectively. Then the following are equivalent:
- Γ is a tree
- The canonical homomorphismis an isomorphism.
Hence, if we can find a fundamental domain constructed by two points whose stabilizers are the powers of S and respectively and show that acts on the tree with this fundamental domain, then we have shown our desired isomorphism. We first need to find the two points stabilized by powers of S and Let the point stabilized by powers of S be and the point stabilized by powers of be For U, we have
This gives us the equations and which simplifies to We only care about the ratio of the coordinates, so we can let , meaning that the point stabilized by S is
It’s easy to verify that U is indeed stabilized by However, we need to show that these are the only matrices in that stabilize U.
Suppose that stabilizes U, i.e.
where is an eigenvalue of M. Since we have so is a 6th root of unity. Furthermore, must be real because the entries of M are all real, so WLOG, suppose so
Now, consider the following theorem:
Theorem 2.
If a matrix M satisfies and , i.e. M is a stabilizer of , then M rotates the plane perpendicular to by some multiple of
The proof of this theorem uses the fact that any vector parallel to the axis of rotation is unaffected by the rotation. So, assuming that the only way for M to keep unchanged is if is parallel to the axis of rotation, or it is perpendicular to the plane rotated by M. Furthermore, because the plane needs to be returned to its original state after n applications of M, so the only possible angles that the plane can be rotated by under M are multiples of In our case, and , so any stabilizer of U rotates the plane perpendicular to by some multiple of There are only 6 multiples of , so there are only 6 possible M that stabilize U. However, we already know that the six powers of S stabilize U, so must be the only stabilizers of U. (The same reasoning applies if we had instead of For W, we have
This gives us the equations
The last equation is redundant, but the first two give us and So, suppose we let Now, we want to show that the powers of i.e. , are the only stabilizers of W. Using Theorem 2.2, we know that any matrix satisfying and rotates the plane perpendicular to by some multiple of There are only 30 multiples of , so W only has 30 stabilizers. Since we know all 30 powers of stabilize W, this implies that they are the only stabilizers of W. With this, we have shown that the edge connecting U and W, call it L, is indeed a fundamental domain with the desired properties.
From Theorem , we can prove the isomorphism if we show that the graph generated by the matrices in on L is a tree. (A tree is a connected graph without cycles.) We want to show that the graph generated by applying combinations of S and to L is a tree by using the following conjecture: the identity can only be constructed with combinations of and This remark is useful because a cycle in the graph only exists when there exists some non-trivial combination of S and that evaluates to the identity.
For the sake of clarity, we denote as N. Consider the basic strings consisting of S and N: (Note that we only consider powers of S up to 5 and powers of N up to 29, as )
Because we consider only the strings with even powers of S, since those with odd powers of S can be rewritten as -1 times an even power of S. Observe that left-multiplying by powers of S effectively cycles the rows of , whereas right-multiplying by S cycles the columns. This means that for any string of the form , we can always find some power of S, say n, such that reduces to the form of one of the three rotation matrices in 3D space below:
In particular, and Recall that and 2 and 4 are inverses in so we can generalize that Therefore, where R is one of the rotation matrices.
Now, we claim that all possible strings of S and N can be reduced down to a product of rotation matrices and some power of S. First note that any string of S and N must alternate between powers of S and N, i.e. be in the form or , because if we have two adjacent powers of S or powers of N, we can always combine them and simplify using
Suppose we have the string . Consider the substring From our observation above with rotation matrices, we can replace this substring with where is one of the three rotation matrices. Then, our string can be rewritten as Now, we do the same thing with the substring , and if we keep repeating the same process until we reach the end of the string, we end up with a product of rotation matrices with some leftover power of S at the end, i.e. something of the form . Our next step is to show that it’s not possible for to be a power of S. To do this, we claim that it’s not possible to have two adjacent rotation matrices to be the same. Consider the substring From our previous observation, In order for the next substring to give us the same rotation matrix, would have to be zero, which would mean our original string was not simplified. Thus, because no two adjacent rotation matrices can be the same, and matrix multiplication is not commutative for rotation matrices around different axes, it’s not possible for to simplify down to something that equals the identity when raised to a certain power. Hence, we have shown that the only strings formed by S and that can give us the identity are the ones consisting of some combination of and This implies that our graph is indeed a tree, so by Theorem 2.1, we have our desired isomorphism.
3. Generalization to k Ropes
Based on the 2-rope and 3-rope cases, there is a clear pattern the property of S needs to follow in relation to the number of ropes there are. It seems J represents the identity if all the ropes were to be indistinguishable, whereas I represents the typical identity where the ropes are all unique. In other words, if there are k ropes, we can think of J as a rotation and I as a rotation, so . Furthermore, we defined S as a rotation, since there are hands. Thus, with k ropes, we have the following conjecture:
The generalization for is not as straightforward, as for the 2-rope case and for the 3-rope case. We came up with the following two conjectures for :
- If we have k ropes, then where n is the product of the first k primes.
- If we have k ropes, then where n is the product of the first k terms of the Fibonacci sequence beginning with 2 and
Acknowledgments
We would like to thank the PROMYS program for this opportunity for research. Furthermore, we want to extend our sincerest gratitude to David Fried for the introduction to the project, John Sim and Sterling Saint Rain for their valuable guidance and insights. Lastly, we would like to appreciate anyone who directly or indirectly assisted us in our research.
| 1 | |
| 2 | Ibid |
| 3 | |
| 4 |
References
- Serre, J.P. Trees, 1 ed.; Springer Berlin, Heidelberg, 1980. Original French edition published by Société Mathématique France, 1977. [CrossRef]
- Trinh, M.-T. Q. (2023). Tangles with k ropes and 2k hands.
- Yamagata, K.; Yamagishi, M. On the Ring of Integers of Real Cyclotomic Fields 2016. 92, 73–76. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



