Submitted:
04 December 2023
Posted:
05 December 2023
You are already at the latest version
Abstract
We report a simple and high-performance flexible strain sensor based on liquid metal nanoparticles (LMNPs) on polyimide substrate by laser induced deposition. The LMNPs were prepared by ultrasonic method, and then the femtosecond laser direct writing technology was used to induce the assembly and deposition of the LMNPs to form liquid metal microwires. Laser local sintering enhances the connection between particles, and a wearable strain sensor was fabricated with the high sensitivity as high as 76.18, the good linearity (a correlation coefficient of 0.999) in a wide sensing rage, the fast response/recovery time of 159 ms/120 ms. Attributed to these extraordinary strain sensing performances, the sensor can sense various dynamic strains in real time, monitor both subtle physiological activities and large human motions. It can be adhered to human skin, and well reflect the change of facial expression and realize real-time monitoring of facial expression. And the vocal cord vibration can be detected for speech recognition while the sensor attached to the outside of the throat.
Keywords:
liquid metal nanoparticles
; strain sensor
; microwire
; laser direct writing
1. Introduction
Sensor is one of the important achievements of electronic information technology, and its emergence has changed people’s lifestyle and improved people’s quality of life[1,2]. Traditional strain sensors are mainly composed of rigid matter, having the disadvantages of high cost and poor ductility[3]. During the movement process the rigidity causes discomfort and instability of sensing signal. Compared with the traditional strain sensors, the flexible strain sensors can meet all the sensing functions of the traditional strain sensors[4,5]. In addition, they have the advantages of low cost, good ductility and good biocompatibility, and are widely used in human motion monitoring, wearable electronic devices, electronic skin and human-computer interaction. Therefore, the strain sensors change from rigid to flexible, that is the next development trend.[6,7]
The flexible strain sensor is composed of flexible substrate and and conductive active material. In recent years, various flexible substrates with excellent performance have been developed, such as platinum catalyzed silica gel and polymethylsiloxane[8] and polyurethane (PU)[9] and other flexible substrate materials[10]. These flexible substrate materials can be applied to various types of flexible strain sensors due to their good scalability and biocompatibility, meeting the needs of the development of flexible strain sensors towards miniaturization, integration and intelligence. The conductive materials of the flexible strain sensors have also been researched, and a variety of new nano conductive materials have been developed, such as carbon nanotube[11,12], metal nanowire, graphene[13,14] and other solid conductive materials[15].
Although the flexible strain sensor made of solid conductive material has good sensitivity, the solid conductive material and the flexible substrate will generate large internal stress or friction from the difference of intrinsic deformation parameters, which will not only cause [16] hysteresis, but also loss the solid conductive material and affect the service life of the flexible strain sensor[17]. If this kind of flexible strain sensor deforms excessively, it may cause irreversible damage to the solid conductive material, making the sensor completely invalid, which limits the application of the sensors.
In addition, liquid metal[18], ionic liquid[19], reduced graphene oxide solution and other liquid conductive materials[20] were obtained more and more attention. Due to the natural ductility and fluidity of the liquid itself, it not only adapt to relatively large range of deformation, also reduce the friction between the conductive material and the flexible substrate. However, it is the common approach to prepare liquid channels, then inject liquid conductive materials into the liquid channels and seal them at present[21]. The preparation process of many liquid flexible strain sensors is cumbersome and the preparation efficiency is low.
Compared with macro sensors, micro sensors have many unique advantages, including low power consumption, wide applications, high wearing comfort and portability, and are easy to realize array sensing and distributed measurement. At the same time, the continuous reduction of sensor size is conducive to the integration of different types of sensors and the realization of powerful sensing systems. The technology of realizing micro flexible strain sensor mainly includes lithography technology[22,23], printing electronic technology[24] and laser processing technology[25]. Lithography technology is widely used, which can realize high-precision and complex microstructure preparation. However, the preparation process steps are cumbersome, the selection of sensing materials is limited, and the flexible positioning and size selection of template dependence are limited. Printing electronic technology has simple process flow, low cost, and can quickly realize diversified microstructure. However, its processing accuracy is limited, and a variety of toxic chemicals need to be added in the process of configuring printing ink. In order to solve the above-mentioned problems, this paper proposes to use the femtosecond laser direct writing technology with high processing accuracy, controllable computer programming, and no mask and toxic chemical reagents to prepare a micron wire flexible strain sensor with excellent performance, and apply it to human health signal monitoring.
Here, the liquid metal nanoparticles (LMNPs) were prepared by ultrasonic method, and then the femtosecond laser direct writing technology was used to induce the assembly and deposition of LMNPs to form microwires. A small-size micro wire flexible strain sensor was prepared. The LMNPs microwire is composed of a large number of nanoparticles burst sintering. The sintered body connection makes the flexible strain sensor have more excellent force sensing performance. The sensitivity of the sensor is as high as 76.18, the linearity is 0.999, the response time is 159 ms, and the recovery time is 120 ms. The sensor can sense various dynamic strains in real time. The application of micro linear strain sensor in human health monitoring is further explored. By installing the sensors in different parts of the human body, the monitoring of human health signals can be successfully realized. It can be detected that the change and change degree of expressions while the sensor is attached to the human face. In the same way, the vocal cord vibration can be detected for speech recognition while the sensor attached to the outside of the throat.
2. Materials and Methods
2.1. Materials and instuments
E-GaIn composed of 75.5% Ga and 24.5% In by weight (melting point 15.7 °C), isopropyl alcohol was purchased from Sigma-Aldrich and used as received.
Scanning electron microscope (SEM) images and Energy dispersive spectrometer (EDS) element distribution mapping images were characterized by using JEOL JSM-7500F, Japan. A thin layer of Pt was sputtered onto the sample for better SEM imaging.
2.3. Synthesis of LMNPs
200 mg of EGaIn was placed in a glass vial filled with 30 mL isopropyl alcohol. The solution was sonicated by a probe sonicator (Scientz-ⅡD) for 30 min cooled by ice bath. Afterward, the large droplets in the resulting suspension were removed by centrifugation with a rotating speed of 2000 rpm. Finally, dissolved in 10 ml isopropyl alcohol for next-step fabrication as shown in Figure1b (left).
2.3. Fabrication process and test instruments
The preparation process of microwire flexible strain sensor from femtosecond laser direct writing of LMNPs is shown in Figure 1a. The firstly a PI substrate with a gold electrode was prepared. The gold electrode is obtained by thermal evaporation on the surface of the PI substrate using a mask plate. The channel width between the electrodes is 100 μm. Then the oxygen plasma was performed for two minutes to improve the wettability of the substrate. A drop of dispersion of LMNPs was added dropwise at the area between the two electrodes. A Ti-sapphire laser (Spectra physics 3960-X1BB) was used in the experiment with a central wavelength of 800 nm, repetition rate of 80 MHz, pulse width of 120 fs. The laser scans point by point according to the preset processing path. The fabrication system of fs-laser derict writing refers to our previous work.[26] Then the device was rinsed with deionized water for 20 s and dry it for 10 min. Finally, silver wires are connected to the gold electrodes on both sides to facilitate subsequent performance tests. The actual photographic image of the tested Liquid Metal strain sensor is shown in Figure1b (right).
A Keithley 2635b as source and measure unit was used to supply power and observe current variation by applying a constant voltage of 0.1 V. The measurement device was made up of a tensile machine with two claws controlled by a stepping motor precisely. The strain sensor was attached to two measuring claws of the device, which were used to form different forces by adjusting the bending angles of the sensor. We can the resistance change by calculating by the equation R =V/I. The response was defined as (R − R0)/R0. During the test, the strain sensor attached to the measuring claw is initially placed horizontally. The original length of the sensor (L) was the distance of the two claws. The thickness of the PI substrate (h) was 100 μm.
The relationship between the move distance (dL) and the bending radius (r) can be calculated using the following equation[27]:
The mechanical strain was calculated as ε = h/2r when the strain sensor was in the outward bending state. Similarly, in the inward bending state, the mechanical strain was calculated as ε = h/2r. Combining this with Equation (1)
3. Results and discussion
3.1. Characterization of strain sensor based on LMNPs
The SEM and EDS mapping images of LMNPs was shown in the Figure1c. The elements of Ga, In and O were evenly distributed. The XPS spectra of LMNPs before and after laser processing is shown in Figure 1d. It can be seen intuitively that the position of the peaks of the sensing-materials remain almost unchanged before and after laser processing.
The microwires of LMNPs were prepared by adjusting the laser power. When the laser power is less, the optical force generated by the optical site of the focused beam is small, and the optical trap center cannot capture more particles, so the processed microwire discontinuous nanoparticles cannot be deposited on the substrate surface. When the laser power is excessive, the external oxide shell of the LMNPs cracked and the internal metal leak. The microwire was completely sintered and conductive that cannot be strain sensing. While the laser processing power is only appropriate, the LMNPs are captured at the laser focus and partial sintering in the laser scanned area forming continuous and sensing microwire. As shown in Figure 2, the LMNPs are captured, the surface morphology of the microwires prepared by laser processing is complete and continuous, with clear edges, and the LMNPs in the microwire are closely packed and arranged in order. According to the set of microwire width, the microwires with line width of 3, 5 and 10 micro-meter can be obtained as shown in Figure 2a-f. The high processing accuracy provides a material basis for micro sensing detection. The SEM of the sensor in different bending states (inward and outward) are shown in Figure 2g and 2f respectively. When the strain sensor in the inward bending state, the LMNPs are closely packed. In the outward bending state, some tiny gaps are discovered. This could be the basis for stain sensing.
3.2. Strain Sensitivity Investigation of strain sensor based on LMNPs
The force sensing properties of the microwire flexible strain sensor based on LMNPs were studied. The sensor was placed between two claws of the tensile machine. By setting the program of the tensile machine to adjust the distance of the two claws, the strain sensor is in different bending states, thus forming different strains. The performance parameters of the strain sensor are measured by a digital source meter. A constant voltage of 0.1V is applied to the microwire strain sensor to detect the current and resistance changes of the microwire sensor in different states. When the strain sensor detects different strains the relative resistance change (R-R0) / R0. In the inward bending state, it is negative (Figure 3a). On the contrary, in the outward bending state, it changes to be positive (Figure 3b). With the decrease of the bending radius and the gradual increase of the strain, the relative resistance of the sensor increases in both the outward and inward bending state. It is corresponding to the above result in Figure 2g and 2f. The test results show that the LMNPs strain sensor can effectively sense different strains. After the sensor experiences the cycle of applying and releasing strain, the current returns to the initial value, which indicates the good reversibility of the sensor.
The outward or inward bending strain at ε of 0.30% was respectively applied to the sensor, and more than 300 cycles of applying and releasing strain were repeated to evaluate repeatability and durability, which were shown in Figure 3c. The details were seen in Figure 3d. The test results show the current response changes of the sensor are the same in multiple test cycles, showing good consistency. Compared with the initial state, the current response change is small after multiple cycles, which indicates that the sensor has excellent repeatability and durability.
The response recovery time of the sensor was detected at outward and inward bending states with ε of 0.30% shown in Figure 4a and 4b, respectively. The response time and recovery time are about 159ms and 120ms, which is superior for motion monitoring systems and robotic applications.[28] The I–V characteristics demonstrate that the current of the microwire linearly increased with the applied voltage clearly, which prove the existence of an ohmic contact between the electrodes and microwires.
The sensitivity is one of the most important performance parameters of the strain sensor to monitor subtle movements, expressed by the gauge factor (GF), which is defined as GF = (R-R0) / R0/Δɛ[29]. As shown in Figure 4d, the GF value is 55.62 for strains range between −0.47% and -0.042% in inward bending state. After strains change from inward to outward, the GF increased by 1.5 times to 76.18 between 0.012% and 0.047%. It is surprised that GF surges to178.70 in a relatively small range (-0.0042%- 0.064%), for conversion of strains direction. Although this only exists in a very small range of specific scenarios, it still has a very large significance. The high sensitivity signified that the sensor has the ability to accurately sense subtle mechanical strains. The mass of the reversible contact between the LMNPs, when the strain sensor was subjected to bending, played a significant role in its outstanding sensitivity.
When the strain sensor senses the inward bending strain (compressive strain), the LMNPs are gradually compressed with the gradual increase of the bending strain. The distance between the LMNPs on both sides of the microcracks gradually decreases, the LMNPs are overlapped and arranged more closely refer to Figure 2g, which shortens the charge transfer distance. As a result, the charge penetration path increased, the resistance of the strain sensor decreased. When the strain sensor senses the outward bending strain (tensile strain), the initial microcracks in the LMNPs film will gradually expand with the increase of tensile strain, and at the same time, new microcracks will be continuously generated refer to Figure 2f. The contact area between nanoparticles decreases, and the electron transport path becomes narrower and longer. Therefore, the resistance of the strain sensor will gradually increase. There are a lot of changeable microcracks in alloy nanoparticle films. In the strain detection range of the sensor, the external strain makes the microcracks in the film expand or be compressed, which significantly affects the transmission distance and path of electrons between particles. Therefore, the relative resistance of the strain sensor changes remarkably. The flexible strain sensor based on LMNPs can accurately sense different tensile and inward compressive strains.
3.2. Strain sensor based on LMNPs for Human Motion Detection
The microwire flexible strain sensor prepared by femtosecond laser direct writing technology is very small in size, and the actual sensing area is only in the order of 100 square microns. It has high wearing comfort and excellent force sensing performance. We explored the application of the micrometer wire flexible strain sensor, and fixed the sensor on different face and neck parts of the human body, and detected the signals related to the movement of the human body in real time.
We fixed the micro meter wire flexible strain sensor on the human face, including the mouth, eyes and forehead. The facial expression changes make the corresponding muscles in different motion states. The test results are shown in Figure 5a. Frowning, smiling and winking can change the relative resistance. Repeat the corresponding action, and the relative resistance change of the sensor will also occur repeatedly. Strain sensor can well reflect the change of facial expression and realize real-time monitoring of facial expression. The sensor can clearly measure various vibrations of human vocal cords. We attach the micro linear strain sensor to the throat of the tester, and it avoid the noise impact caused by the outside through the close tight between the microwire sensor and the part of the human body to be detected. The tester speaks different English words and repeats the English words three times. The current change of the sensor was recorded. Through calculation, the test results are shown in Figure 5b. Different English words “laser” ’liquid metal” and have different waveform characteristics. This indicates that the flexible strain sensor based on liquid metal microwires can detect various vocal cord vibrations and distinguish different words, which can be used for speech recognition.
5. Conclusions
In summary, we have developed a high-performance strain sensor for detection of human motion and subtle strain based on liquid metal microwire. The small-size flexible strain sensor has a higher sensitivity (GF=76.18) for detecting subtle forces accurately was prepared by Fs-laser direct writing. The strain sensor also has excellent short response time is 159 ms, and the recovery time is 120 ms. We have compared the GF value of this sensor with other reported strain sensors (Table 1), concluding that in addition to having a much easier and cheaper fabrication process, our strain sensor gives a superior performance. It has important significance in the development of real-time monitoring of human physiological parameters.
Funding
Please add: This research was funded by the National Natural Science Foundation of China (NSFC) under Grant #62075081 and the Natural Science Foundation of Jilin Province under Grant #20220101105JC.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (NSFC) under Grant #62075081 and the Natural Science Foundation of Jilin Province under Grant #20220101105JC.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Xu, L.; Zhang, Z.; Gao, F.; Zhao, X.; Xun, X.; Kang, Z.; Liao, Q.; Zhang, Y. Self-powered ultrasensitive pulse sensors for noninvasive multi-indicators cardiovascular monitoring. Nano Energy 2021, 81, 105614. [Google Scholar] [CrossRef]
- Li, L.; Sheng, S.; Liu, Y.; Wen, J.; Song, C.; Chen, Z.; Xu, W.; Zhang, Z.; Fan, W.; Chen, C. , et al. Automatic and continuous blood pressure monitoring via an optical-fiber-sensor-assisted smartwatch. PhotoniX 2023, 4, 21. [Google Scholar] [CrossRef]
- Qiu, A.; Li, P.; Yang, Z.; Yao, Y.; Lee, I.; Ma, J. A path beyond metal and silicon:Polymer/nanomaterial composites for stretchable strain sensors. Advanced Functional Materials 2019, 29, 1806306. [Google Scholar] [CrossRef]
- Liu, H.; Li, Q.; Zhang, S.; Yin, R.; Liu, X.; He, Y.; Dai, K.; Shan, C.; Guo, J.; Liu, C. , et al. Electrically conductive polymer composites for smart flexible strain sensors: A critical review. Journal of Materials Chemistry C 2018, 6, 12121–12141. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, J.; Tian, X.; Yuan, Y. Ultra-highly sensitive graphene/polyaniline@epoxidized natural rubber strain sensors for human motion monitoring. Sensors and Actuators A: Physical 2023, 358, 114421. [Google Scholar] [CrossRef]
- Wang, T.; Yang, H.; Qi, D.; Liu, Z.; Cai, P.; Zhang, H.; Chen, X. Mechano-based transductive sensing for wearable healthcare. Small 2018, 14, 1702933. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.-U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Advanced Functional Materials 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Yang, T.; Li, X.; Jiang, X.; Lin, S.; Lao, J.; Shi, J.; Zhen, Z.; Li, Z.; Zhu, H. Structural engineering of gold thin films with channel cracks for ultrasensitive strain sensing. Materials Horizons 2016, 3, 248–255. [Google Scholar] [CrossRef]
- Mohammed Ali, M.; Maddipatla, D.; Narakathu, B.B.; Chlaihawi, A.A.; Emamian, S.; Janabi, F.; Bazuin, B.J.; Atashbar, M.Z. Printed strain sensor based on silver nanowire/silver flake composite on flexible and stretchable tpu substrate. Sensors and Actuators A: Physical 2018, 274, 109–115. [Google Scholar] [CrossRef]
- Zhan, Z.; Sun, Q.; Tang, C.; Wu, H.; Lu, Y. Ultra-highly sensitive and self-healing flexible strain sensor with a wide measuring range based on a bilayer structure. Sensors and Actuators A: Physical 2023, 360, 114510. [Google Scholar] [CrossRef]
- Zhou, C.-G.; Sun, W.-J.; Jia, L.-C.; Xu, L.; Dai, K.; Yan, D.-X.; Li, Z.-M. Highly stretchable and sensitive strain sensor with porous segregated conductive network. ACS Applied Materials & Interfaces 2019, 11, 37094–37102. [Google Scholar]
- Gao, Y.; Guo, F.; Cao, P.; Liu, J.; Li, D.; Wu, J.; Wang, N.; Su, Y.; Zhao, Y. Winding-locked carbon nanotubes/polymer nanofibers helical yarn for ultrastretchable conductor and strain sensor. ACS Nano 2020, 14, 3442–3450. [Google Scholar] [CrossRef]
- Wang, Y.; Hao, J.; Huang, Z.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. Flexible electrically resistive-type strain sensors based on reduced graphene oxide-decorated electrospun polymer fibrous mats for human motion monitoring. Carbon 2018, 126, 360–371. [Google Scholar] [CrossRef]
- Lau, K.Y.; Qiu, J. Broad applications of sensors based on laser-scribed graphene. Light: Science & Applications 2023, 12, 168. [Google Scholar]
- Jiang, H.; Zhang, J.; Qin, M.; Zhang, J.; Zou, X.; Weng, X. A flexible piezoresistive strain sensor based on black phosphorus/gold nanocomposites interspersed sponge for motion sensing. Sensors and Actuators A: Physical 2023, 356, 114359. [Google Scholar] [CrossRef]
- Ho, M.D.; Ling, Y.; Yap, L.W.; Wang, Y.; Dong, D.; Zhao, Y.; Cheng, W. Percolating network of ultrathin gold nanowires and silver nanowires toward “invisible” wearable sensors for detecting emotional expression and apexcardiogram. Advanced Functional Materials 2017, 27, 1700845. [Google Scholar] [CrossRef]
- Lan, L.; Yin, T.; Jiang, C.; Li, X.; Yao, Y.; Wang, Z.; Qu, S.; Ye, Z.; Ping, J.; Ying, Y. Highly conductive 1d-2d composite film for skin-mountable strain sensor and stretchable triboelectric nanogenerator. Nano Energy 2019, 62, 319–328. [Google Scholar] [CrossRef]
- Tang, L.; Yang, S.; Zhang, K.; Jiang, X. Skin electronics from biocompatible in situ welding enabled by intrinsically sticky conductors. Advanced Science 2022, 9, 2202043. [Google Scholar] [CrossRef]
- Shao-Hui, Z.; Feng-Xia, W.; Jia-Jia, L.; Hong-Dan, P.; Jing-Hui, Y.; Ge-Bo, P. Wearable wide-range strain sensors based on ionic liquids and monitoring of human activities. Sensors 2017, 17, 2621. [Google Scholar]
- Seyedin, M.Z.; Razal, J.M.; Innis, P.C.; Wallace, G.G. Strain-responsive polyurethane/pedot:Pss elastomeric composite fibers with high electrical conductivity. Advanced Functional Materials 2014, 24, 2957–2966. [Google Scholar] [CrossRef]
- Xs, A.; Bo, Y.B.; Lei, S.A.; Wei, R.A.; Jing, L. Liquid metal enabled injectable biomedical technologies and applications. Applied Materials Today 2020, 20, 100722. [Google Scholar]
- Andreev, Y.A.; Matt, G.E.; Brabec, C.J.; Sitter, H.; Badt, D.; Seyringer, H.; Sariciftci, N.S. Epidermal electronics. Science 2011, 333, 838–843. [Google Scholar]
- Li, J.; Yan, J.; Jiang, L.; Yu, J.; Guo, H.; Qu, L. Nanoscale multi-beam lithography of photonic crystals with ultrafast laser. Light: Science & Applications 2023, 12, 164. [Google Scholar]
- Yao; S.; Zhu; Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. NANOSCALE -CAMBRIDGE- 2014.
- Dai, Y.-Z.; Liang, S.-Y.; Lv, C.; Wang, G.; Xia, H.; Zhang, T.; Sun, H.-B. Controllably fabricated single microwires from pd-wo3•xh2o nanoparticles by femtosecond laser for faster response ammonia sensors at room temperature. Sensors and Actuators B: Chemical 2020, 316, 128122. [Google Scholar] [CrossRef]
- Zhu, H.; Dai, Y.-Z.; Sun, X.-C.; Xia, H. A fine single pd microwire h2 sensor fabricated by using a femtosecond laser for a wide detection range at room temperature. Nanoscale Advances 2022. [Google Scholar] [CrossRef]
- Tang, N.; Zhou, C.; Qu, D.; Fang, Y.; Zheng, Y.; Hu, W.; Jin, K.; Wu, W.; Duan, X.; Haick, H. A highly aligned nanowire-based strain sensor for ultrasensitive monitoring of subtle human motion. Small 2020, 16, 2001363. [Google Scholar] [CrossRef] [PubMed]
- Han, Z.; Liu, L.; Zhang, J.; Han, Q.; Wang, K.; Song, H.; Wang, Z.; Jiao, Z.; Niu, S.; Ren, L. High-performance flexible strain sensor with bio-inspired crack arrays. Nanoscale 2018, 10, 15178–15186. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire-elastomer nanocomposite. Acs Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Han, D.-D.; Zhang, Y.-L.; Liu, Y.; Liu, Y.-Q.; Jiang, H.-B.; Han, B.; Fu, X.-Y.; Ding, H.; Xu, H.-L.; Sun, H.-B. Bioinspired graphene actuators prepared by unilateral uv irradiation of graphene oxide papers. Advanced Functional Materials 2015, 25, 4548–4557. [Google Scholar] [CrossRef]
- Xu, X.-L.; Li, S.-X.; Yang, Y.; Sun, X.-C.; Xia, H. High-performance strain sensor for detection of human motion and subtle strain by facile fabrication. Measurement 2022, 189, 110658. [Google Scholar] [CrossRef]
- Davoodi, E.; Montazerian, H.; Haghniaz, R.; Rashidi, A.; Ahadian, S.; Sheikhi, A.; Chen, J.; Khademhosseini, A.; Milani, A.S.; Hoorfar, M. , et al. 3d-printed ultra-robust surface-doped porous silicone sensors for wearable biomonitoring. ACS Nano 2020, 14, 1520–1532. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
(a) Schematic illustration fabrication of flexible strain sensor based on LMNPs by FsLDW. (b) The photo of LMNPs dissolved in 10 isopropyl alcohol (left). The actual photo of the tested LM strain sensor (right). (c) The SEM and EDS mapping images of LMNPs. The scale bar is 500 nm. (d) The XPS spectra of LMNPs before and after laser processing.
Figure 1.
(a) Schematic illustration fabrication of flexible strain sensor based on LMNPs by FsLDW. (b) The photo of LMNPs dissolved in 10 isopropyl alcohol (left). The actual photo of the tested LM strain sensor (right). (c) The SEM and EDS mapping images of LMNPs. The scale bar is 500 nm. (d) The XPS spectra of LMNPs before and after laser processing.
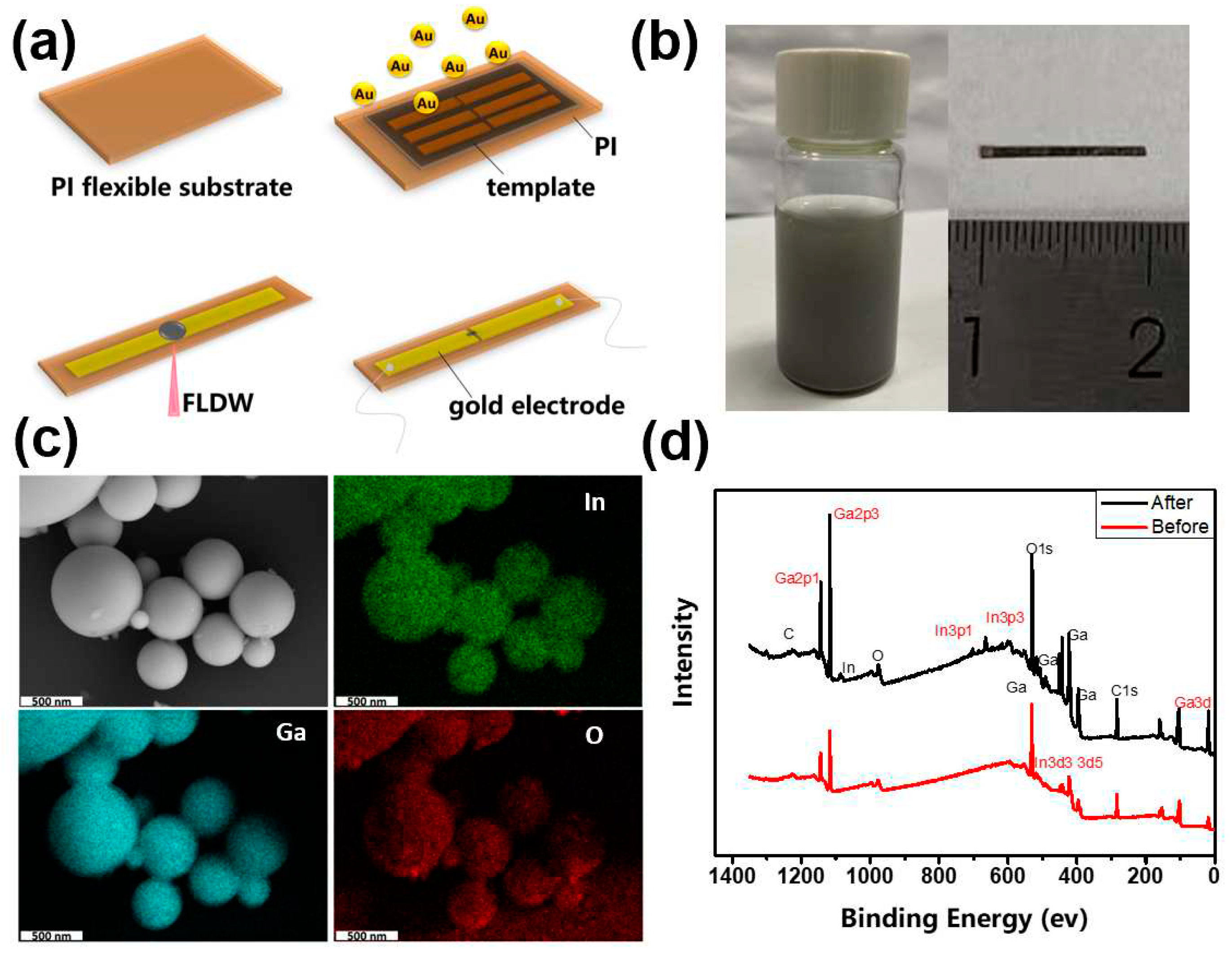
Figure 2.
The SEM and enlarged view images with various width of 10 μm (a), 5 μm (b), and 3 μm (c). (d-f) The enlarge views of (a-c). (g) The SEM of the sensor in inward bending states. (h) The SEM of the sensor in outward bending states.
Figure 2.
The SEM and enlarged view images with various width of 10 μm (a), 5 μm (b), and 3 μm (c). (d-f) The enlarge views of (a-c). (g) The SEM of the sensor in inward bending states. (h) The SEM of the sensor in outward bending states.
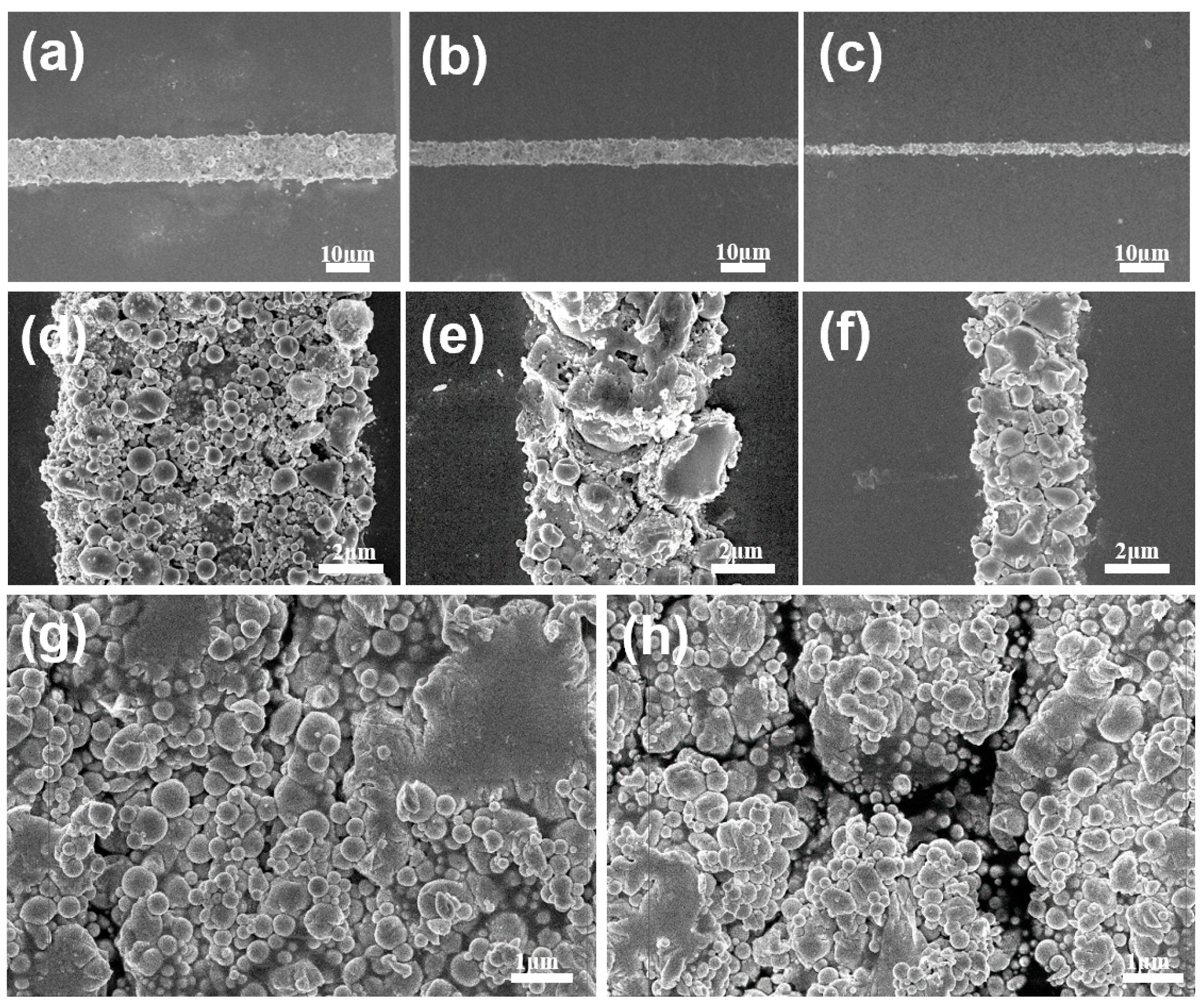
Figure 3.
The response of the strain sensor at different bending states by applying different inward strains (a) and outward strains (b). (c) The response of 300 continuous cycles by applying a strain of 0.30% in the inward state and outward. (d) Enlarge area of (c).
Figure 3.
The response of the strain sensor at different bending states by applying different inward strains (a) and outward strains (b). (c) The response of 300 continuous cycles by applying a strain of 0.30% in the inward state and outward. (d) Enlarge area of (c).
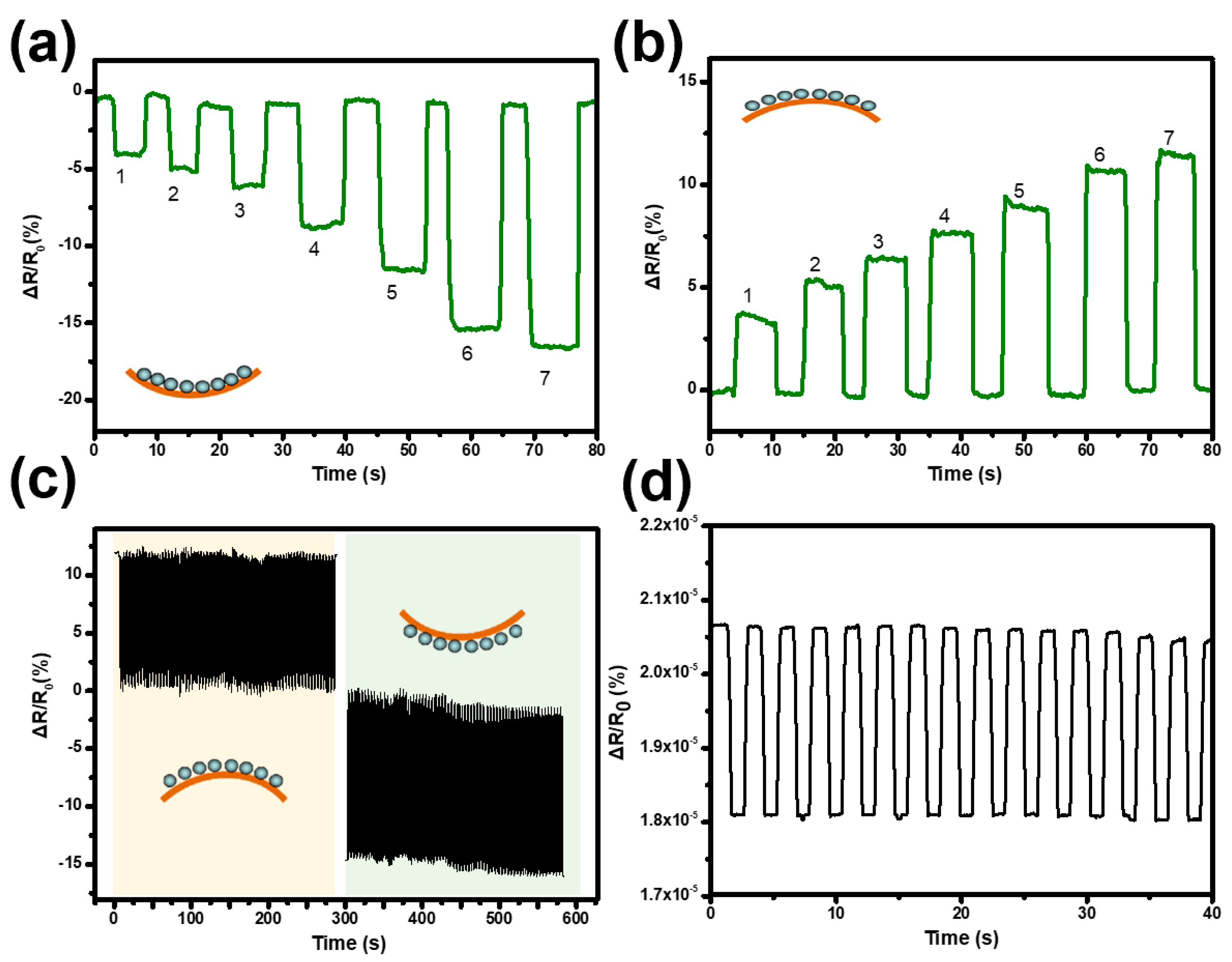
Figure 4.
Time response of the microwire-based strain sensor under (a) outward and (b) inward bending of 0.30%. (c) I–V conductivity measurement of the LMNPs microwire-based strain sensor. (d) Relative resistance changes of the manowire-based sensor under different strains. The GF values were obtained by linear fitting.
Figure 4.
Time response of the microwire-based strain sensor under (a) outward and (b) inward bending of 0.30%. (c) I–V conductivity measurement of the LMNPs microwire-based strain sensor. (d) Relative resistance changes of the manowire-based sensor under different strains. The GF values were obtained by linear fitting.
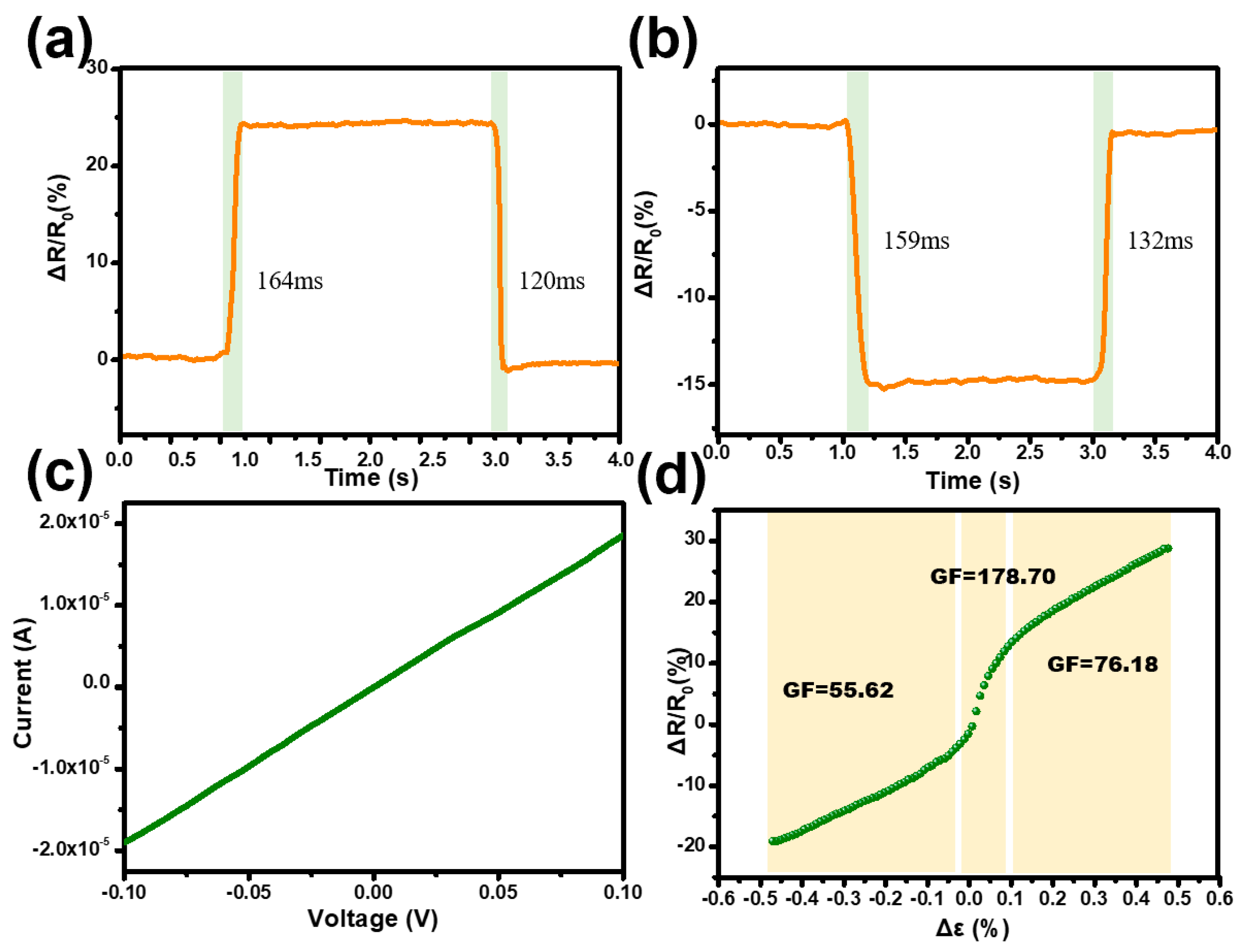
Figure 5.
Applications of strain sensor based on LMNPs. (a) Fixed the strain sensor on the human face, including the mouth, forehead and eyes. The response of the strain sensor was achieved when facial expression changed, including frowning, smiling, and winking. (b) Fixed the strain sensor on the neck to detect vocal cord vibration and the response signal of various words, “liquid metal” and “laser”.
Figure 5.
Applications of strain sensor based on LMNPs. (a) Fixed the strain sensor on the human face, including the mouth, forehead and eyes. The response of the strain sensor was achieved when facial expression changed, including frowning, smiling, and winking. (b) Fixed the strain sensor on the neck to detect vocal cord vibration and the response signal of various words, “liquid metal” and “laser”.
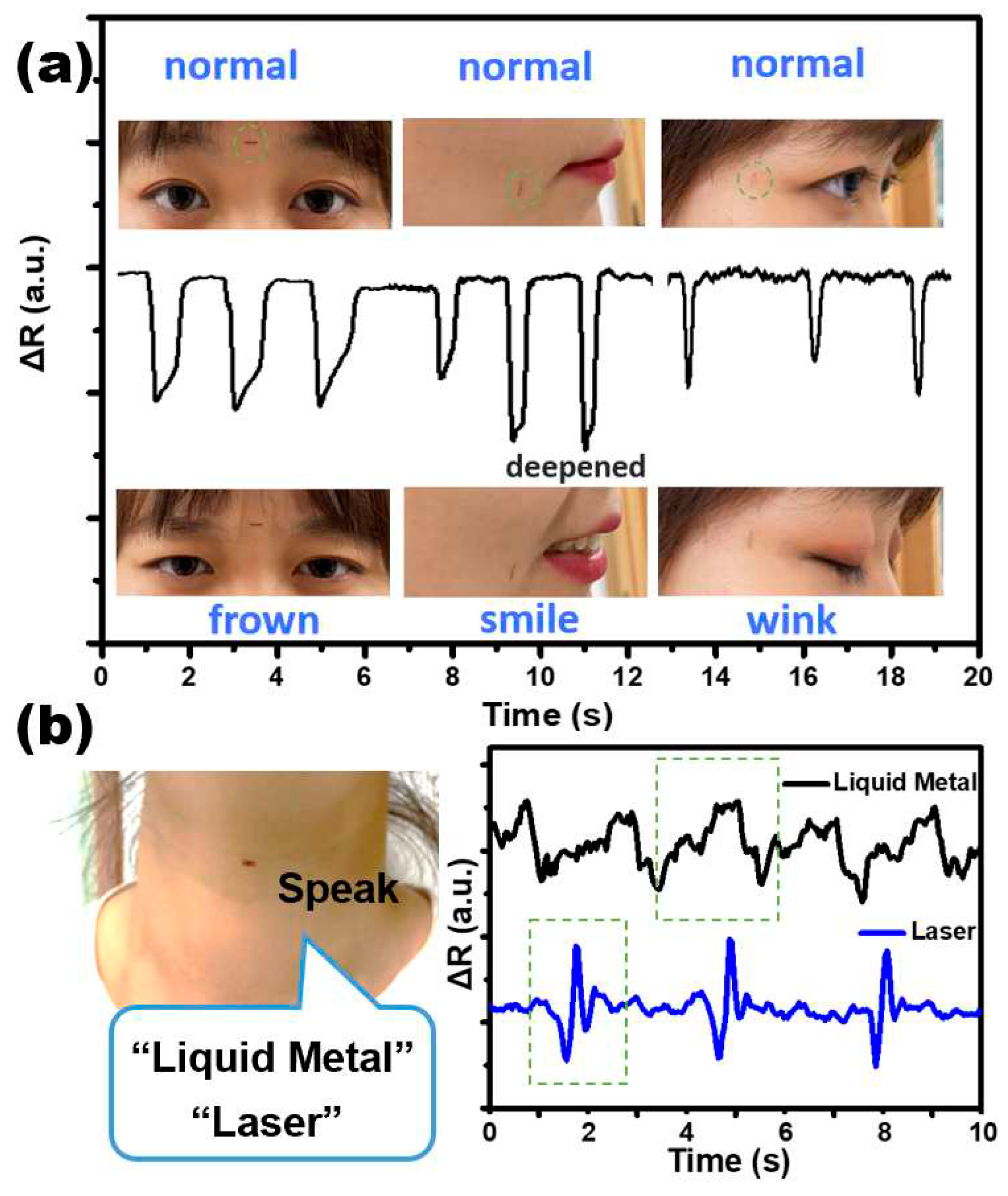

Table 1.
Device performance of strain sensors.
| Materials | Methods | GF | Sensing | Ref. |
|---|---|---|---|---|
| MXene/CNT | Layer-by-layer spraycoating |
4.35 | 0.1-0.6% | [30] |
| 4 nm AuNPs |
Layer-by-layer spincoating and contact |
14 | 0-0.12% | [12] |
| Carbon Black and carboxymethyl cellulose |
Dip-coating | 4.3 | 0-0.6% | [13] |
| AgNW/ MoS2 |
Mix two materials | 5.96 | 0-3 | [17] |
| AuNP thin film |
Dip-coating | 19.94 | 0.1-0.5% | [31] |
| Graphene | 3D-printed | 10 | 2-10% | [32] |
| LMNPs | FsLDW | 76.18 | 0-0.48% | This work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



