
Submitted:
08 December 2023
Posted:
12 December 2023
You are already at the latest version
Abstract
This research explores the predictive capabilities of autonomous driving systems by integrating human factor considerations within the context of safety-critical events. Recognizing the significance of human behaviors in influencing driving dynamics, the study employs advanced modeling techniques to enhance the accuracy of predictions in scenarios that demand heightened safety measures. Traditional rule-based systems and monotonic logic often fall short in addressing the complexities of safety-critical events. To overcome these limitations, the research proposes the application of non-monotonic logic, allowing for flexible and adaptive reasoning that accommodates exceptions and context-specific information.The study emphasizes the importance of incorporating individual differences among drivers, such as risk-taking tendencies, reaction times, decision-making processes, and driving styles. By considering these human factors, the research aims to develop realistic and accurate autonomous driving models that capture the nuances of real-world driving scenarios, especially in safety-critical situations. The predictive model takes into account both internal and external factors, enabling the autonomous system to anticipate and respond effectively to unforeseen events.The primary goal is to provide autonomous vehicles with the capability to make plausible inferences, handle conflicting data, and adapt their behavior in real-time during safety-critical events. The proposed model integrates personalized cognitive agents for each driver, incorporating their unique preferences, characteristics, and needs. This personalized approach aims to optimize the safety and efficiency of autonomous driving, contributing to the ongoing evolution of intelligent transportation systems.In conclusion, this research contributes to advancing the field of autonomous driving by introducing a predictive model that leverages human factor considerations to enhance safety in safety-critical events. The incorporation of non-monotonic logic and individualized cognitive agents signifies a comprehensive approach to address the challenges associated with predicting autonomous driving behavior, paving the way for safer and more reliable autonomous vehicles in dynamic and unpredictable environments.
Keywords:
car–following
; non-monotonic logic
; driving behavior
; naturalistic driving studies
; safety-critical events
; cognitive vehicles
1. Introduction
Despite the increasing prevalence of vehicle automation, the persistently high number of car crashes remains a concern. Safety-critical events in human-driven scenarios have become more intricate and partially uncontrollable due to unforeseen circumstances. Investigating human driving behavior is imperative to establish traffic baselines for mixed traffic, encompassing traditional, automated, and autonomous vehicles (AVs). Various factors, such as weather conditions affecting visibility in longitudinal car-following (CF) behavior [1,2], influence human driving behavior [3].
Car-following behavior, illustrating how a following vehicle responds to the lead vehicle in the same lane, is a crucial aspect. Existing car-following models often make assumptions about homogeneous drivers, neglecting significant heterogeneity in driving experience, gender, character, emotions, and sociological, psychological, and physiological traits. Failing to account for this heterogeneity hampers a comprehensive understanding of car-following behavior, limiting model accuracy and applicability. It is essential to consider driver heterogeneity in developing more realistic car-following models for mixed traffic. Incorporating individual differences, such as risk-taking tendencies, reaction times, decision-making processes, and driving styles, enhances the modeling of real-world driving complexities. Categorizing drivers into a few types oversimplifies the richness and diversity of driver characteristics, necessitating a more comprehensive approach to capture nuances within different driver profiles. Addressing these limitations requires models that effectively incorporate external heterogeneity among different drivers and internal heterogeneity within a single driver. The proposed model relies on personalized cognitive agents, assigning each driver a personalized cognitive agent capable of representing the driver's profile through accessing local information and learning characteristics. These personalized cognitive agents process individual user preferences, characteristics, and needs, aiming to provide tailored and customized experiences in the operation of a cognitive vehicle. This approach considers unique requirements and individual preferences of AV occupants while better understanding the driving behavior of surrounding vehicles in mixed traffic [3].
2. Related Research
The literature encompasses various driving models [3,4], with many attempting to simulate a real driver's road tracking performance by making assumptions about inputs and outputs. These models aim to capture the decision-making processes and behaviors of drivers, including responses to changes in the road and traffic induced by external factors. A cognitive vehicle, equipped with onboard sensors to observe the driving behavior of surrounding vehicles [5], plays a role in recognizing driving maneuvers. It is acknowledged that driving behavior models involve a level of uncertainty due to their reliance on assumptions and approximations of real-world driver behavior. Additionally, they are influenced by the inherent uncertainties associated with onboard sensor measurements and subsequent feature extraction that characterize the surrounding objects [6]. This uncertainty can significantly impact the performance of control systems designed based on these models. A viable approach to tackle this issue is the development of models capable of predicting and managing uncertainties inherent in driving scenarios.
This includes modeling the driving behaviors of human drivers and automated or autonomous vehicles, and external and other factors that can affect driving performance. Driving behaviors are the main cause of road accidents and one of the main sources of insurance claims [7]. Wang and Lu [8] found that the differences in driving behavior between males and females have remained unchanged or have increased in some aspects. The differences involved traffic accidents and offenses, with driving times, attitudes, education, and other background factors controlled for. Furthermore, all drivers are involved in traffic accidents and fatalities; however, younger drivers have the highest rate of accidents. Hiang and Ming [9] investigated the relationship of age and gender to speeding. Younger drivers exhibit the highest accident rates, as highlighted in [10]; they are notably over-represented in traffic accidents and fatalities and are more prone than older drivers to be at fault in the accidents that involve them. Furthermore, it is well-documented that men and women tend to display distinct driving behaviors. The literature consistently evidences higher crash rates among male drivers than among their female counterparts, [11,12]. These disparities in driving patterns and accident rates among age and gender groups underscore the importance of tailoring safety measures and interventions to enhance road safety for all. The objective of this study was to explore the relationships between age and gender and speeding behavior. The findings revealed that, on average, young and male drivers tended to maintain higher speeds than their older and female counterparts before entering a roundabout and upon exiting it. This insight sheds light on the distinct driving patterns associated with different age and gender groups, underscoring the need for targeted interventions to address speeding behaviors and enhance road safety. In [13], the primary objective was to examine the factors influencing aggressive driving behavior, with a particular focus on age, driving experience, and additional covariates. To achieve this, regression analysis was employed to assess how age and driving experience, as well as their potential interactions with other covariates, contributed to the manifestation of aggressive driving behavior. This comprehensive analysis aimed to provide valuable insights into the complex interplay of variables affecting driver behavior and aggression on the road. Driving behaviors, as discussed in [14], constitute a primary contributor to road accidents and represent a significant source of insurance claims. The results show that young and male drivers, on average, travel at a higher velocity than older and female drivers before entering a roundabout and accelerate to a higher velocity upon exiting. Lee et al. [15] investigated the relationship between crash severity and the age and gender of the at-fault driver, the socio-economic characteristics of the surrounding environment, and road conditions. They adopted the logit regression model, using age as a continuous variable to investigate how age has an impact on accident severity and to uncover situations where age has little effect. Shahverdy et al. [16] introduced a deep learning method for analyzing driver behavior focusing on driving signals, including acceleration and speed, to recognize five types of driving styles: normal, aggressive, distracted, drowsy, and drunk. Liu et al. [17] examined factors that influence aggressive driving behavior, such as human factors, personality traits, and demographic characteristics. Regression analysis was used to explore the impacts of age and driving experience and their interactions with other variables in relation to aggressive driving behaviors. Aggressive driving behavior is influenced by a combination of human factors, including age, driving experience, personality traits, and demographic characteristics. The analysis revealed a negative correlation between age and aggressive driving behaviors; namely, as individuals grow older, they tend, on average, to engage in fewer aggressive driving behaviors. The study also found a positive correlation between the personality trait of neuroticism and aggressive driving behaviors; that is, individuals with higher levels of neuroticism, characterized by emotional instability and heightened negative emotions, are more likely to exhibit aggressive driving tendencies. Significant associations were identified among age, driving experience, and depression. This suggests that older, more experienced drivers may be less prone to depression, potentially reducing their likelihood of engaging in aggressive driving behaviors.
In the domain of car-following models, artificial intelligence tools serve as effective means to represent various aspects and behaviors of drivers. A novel non-monotonic logic-based approach for car-following in Autonomous Vehicles (AVs) has been proposed in previous studies [18,19]. This approach involves the development of a reasoning system incorporating non-monotonic inference mechanisms designed to handle uncertainties and exceptions within car-following scenarios.
The experimental outcomes of this approach demonstrate enhanced adaptability and decision-making performance compared to traditional rule-based systems. The researchers introduced an adaptive car-following system utilizing non-monotonic logic to improve reasoning and decision-making capabilities. This system incorporates context-dependent rules and non-monotonic inference mechanisms, effectively managing exceptions and conflicting information during car-following. Simulation results indicate improved safety and efficiency across various traffic scenarios.
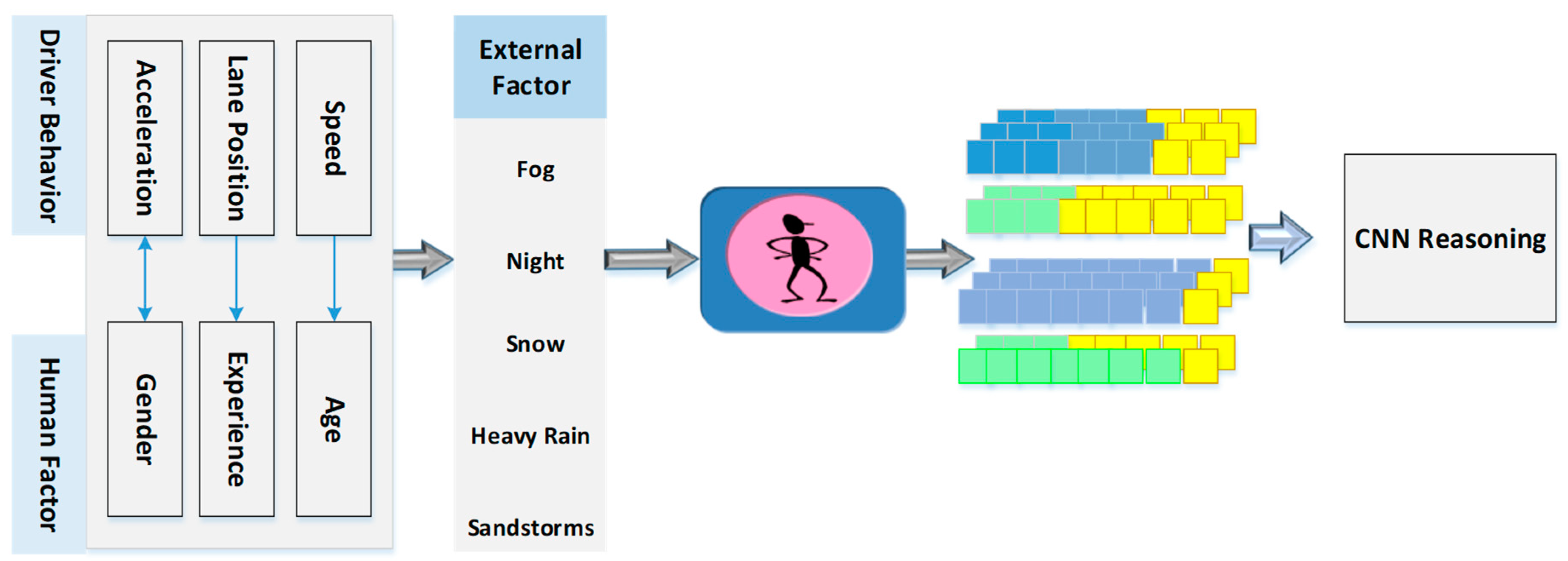
This study explores the integration of non-monotonic logic into car-following algorithms, as illustrated in Figure 1. It proposes an architecture that combines rule-based reasoning with non-monotonic inference mechanisms to address uncertainties and modify the behavior of AVs during car-following. The experimental evaluations reveal improved performance and adaptability, particularly under dynamic traffic conditions.
The paper offers a comprehensive overview of the challenges and opportunities associated with applying non-monotonic reasoning to car-following by AVs. It critically examines the limitations of traditional rule-based systems and underscores the benefits of non-monotonic logic in managing uncertainties, conflicting data, and context-dependent reasoning. Additionally, the paper identifies potential avenues for future research and explores other applications of non-monotonic reasoning within the realm of autonomous driving.
Figure 1.
Personalized cognitive agent reasoning.
3. Methodology
3.1. The CNN Reasoning Approach
Reasoning and decision-making tasks benefit from the application of Convolutional Neural Network (CNN) reasoning, as demonstrated in recent studies [19]. The conventional CNN architecture typically comprises multiple convolutional layers succeeded by fully connected layers. These layers operate collaboratively to learn hierarchical representations of input data, allowing the network to discern intricate patterns and features. To enhance reasoning capabilities, CNNs can be extended or combined with additional components.
This extension often involves the incorporation of supplementary layers, such as Recurrent Neural Networks (RNNs) or attention mechanisms. These additions help the network capture temporal or spatial dependencies, facilitating sequential reasoning [20]. Additionally, CNNs are adept at visual reasoning tasks, where the model is trained to reason about relationships between objects. Through the learning process, the model extracts meaningful features from input data and utilizes them to infer relationships and draw logical deductions. In the case of AVs, these features are likely derived from various sources of information, such as sensor data, video feeds, and other data related to a driver’s behavior and the surrounding environment. The goal of feature extraction is to transform raw data into a format that the model can work with effectively. These extracted features can include elements like a vehicle’s speed, position, and orientation, road conditions, weather conditions, and more. Here, a hybrid approach is proposed, which combines multiple techniques to create more accurate and robust driver models, such as the one illustrated in Figure 1. A hybrid model uses deep learning to find causal relationships between a statistical model and human factors, such as age, gender, experience, and driving behavior, collected through feature extraction, to predict a driver’s speed and acceleration, but also incorporates rule-based logic to handle unexpected situations, as illustrated in Figure 2. One of the challenges in modeling driver behavior is dealing with unexpected or uncommon situations on the road. To do this, rule-based logic is incorporated into the model. These rules act as a safety net and provide the model with guidelines on how to react in situations that may not be well represented in the training data. This hybrid approach combines the strengths of different techniques to create a comprehensive driver model. It uses deep learning for understanding causal relationships, statistical modeling for making predictions, and rule-based logic for handling unexpected scenarios, ultimately improving the accuracy and robustness of the model’s predictions and inferences related to driver behavior.
3.2. Data Collection
The dataset used in this research is based on naturalistic driving data taken from the L3Pilot database [21]. A European research project, L3Pilot, which tests the viability of automated driving as a safe and efficient means of transportation on public roads, has developed a common data format (CDF) for both data collection and processing, and has implemented a consolidated database for processed data collection. The data consist of performance indicators for four driving scenarios, free driving, following a lead vehicle, driving in traffic jams, and changing lanes. The used data for training the deep learning algorithm involves cleaning and formatting the data, selecting relevant features, and splitting the dataset into training, validation, and testing sets. Table 1 summarizes the main notations that we use here.
3.3. Algorithm Description
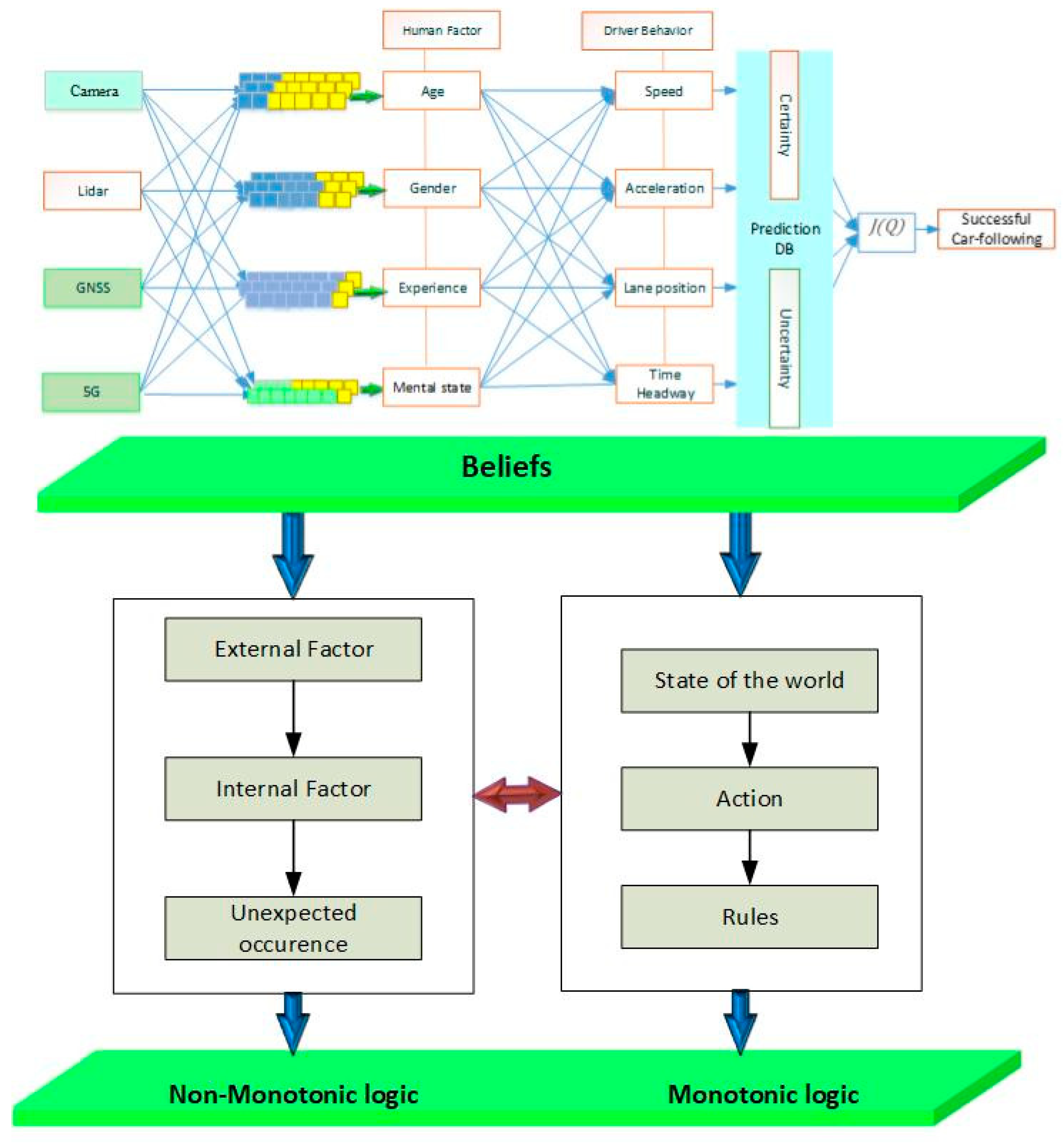
Our approach is a hybrid algorithm, outlined in Figure 3, consisting of two distinct phases. Deep learning, a subset of machine learning, involves training artificial neural networks to discern patterns in data. By employing deep learning techniques to analyze extensive datasets of human and vehicle behavior, one can uncover intricate patterns and causal relationships that may be challenging to detect using conventional statistical methods.
Statistical tools are then applied to assess the performance of the prediction scheme. The model predicting a driver's behavior during car-following operates in terms of certainty and uncertainty. Certainty in car-following increases when the driver is familiar with the situation, and the leading vehicle maintains a consistent speed, appropriate acceleration and deceleration, and adherence to traffic rules. Conversely, uncertainty arises when the leading vehicle executes erratic or unexpected actions, such as sudden braking, lane changes without signaling, and unforeseen accelerations. Lack of information or incomplete information about road conditions, traffic situations, or the intentions of the leading vehicle can also contribute to uncertainty.
Drivers commonly rely on signals and visual cues from the leading vehicle to comprehend its intentions. When these cues are unclear or inconsistent, predicting the leading vehicle's next move becomes challenging for the following driver. Addressing these sources of uncertainty is crucial for enhancing road safety and optimizing traffic flow.
Figure 3.
Hybrid model.
3.4. Feature extraction
One strategy involves leveraging deep learning models to extract features from data. Subsequently, these features serve as input for various machine learning schemes, including nearest neighbor, random forest, naïve Bayesian network (NBN), decision table schemes, and others. The extraction of features based on naturalistic driving data holds pivotal significance for analyzing driving behavior, especially in the context of safety-critical events. While human driving behavior can be identified, its control is challenging. Human drivers are influenced not only by external factors, which can be estimated and predicted, but also by internal factors affecting cognition that are challenging to distinguish or control. In contrast, for Autonomous Vehicles (AVs), both internal and external factors are predictable, as depicted in Figure 4.
The trained CNN can construct a driver profile based on time headway. CNN classifies driver behaviors into three groups: normal, inattentive, and aggressive. To evaluate and validate the quality of the data-clustering results, we used the silhouette, a statistical technique [22] for graphically representing how well each object has been classified. For each driver, we calculated a silhouette score, using the following formula:
where ai, is the average distance from the 𝑖th point to the other points in the same cluster as 𝑖, and bi is the minimum average distance from the 𝑖th point to points in a different cluster, minimized over all clusters. The silhouette value is an internal criterion used for interpretating and validating consistency within a cluster of data; it measures how similar each point is to points in its cluster when compared to points in other clusters. Furthermore, we assigned a score rating the degree of a driver’s aggressiveness.
3.5. Reasoning-Based Non-Monotonic Logic
To address the constraints associated with monotonic logic, we advocate for the adoption of non-monotonic logic as a promising strategy to augment the reasoning capabilities of Autonomous Vehicles (AVs) during car-following scenarios. Non-monotonic logic introduces flexibility and adaptability into reasoning processes, accommodating exceptions and context-specific information. By integrating non-monotonic logic into AVs, they can engage in plausible inferences, manage conflicting data, and dynamically adapt their behavior to ensure safe and efficient car-following. As a result, the level of confidence in driver profiles is represented by the following statement:
The degree of belief in the likelihood of an accident depends on the driver’s profiles (A, B, and C), and is expressed as follows.
The degree of belief in the likelihood of an accident depends on a joint probability derived from the driver’s profile (A, B, and C) and driving-related experience (E) and is computed as follows (the probabilities of the state depend on the weights obtained from the CNN training):
The personalized cognitive agent alerts the autonomous control system based on the causal relationship between human factors and driver behavior related to time headway. This alert (which is denoted as alarm) can be represented as a combinatorial combination of the Boolean variables involved, as showed in Table 2
The personalized cognitive agent formulates rules based on identified beliefs. While traditional rule-based systems and monotonic logic have been extensively utilized for decision-making in Autonomous Vehicles (AVs), these approaches often encounter difficulties in handling the non-deterministic and dynamic nature of car-following scenarios. Monotonic logic typically assumes that additional information does not alter the validity of previously drawn conclusions, posing challenges in dealing with exceptions, conflicting data, and context-dependent reasoning prevalent in car-following situations.
To overcome these limitations, the adoption of non-monotonic logic is recommended as a promising approach to enhance the reasoning capabilities of AVs during car-following. Non-monotonic logic offers flexible and adaptive reasoning, accommodating exceptions and context-specific information. Integrating non-monotonic logic into AVs empowers them to make plausible inferences, handle conflicting, uncertain, and incomplete data, and dynamically adapt their behavior for safe and efficient car-following.
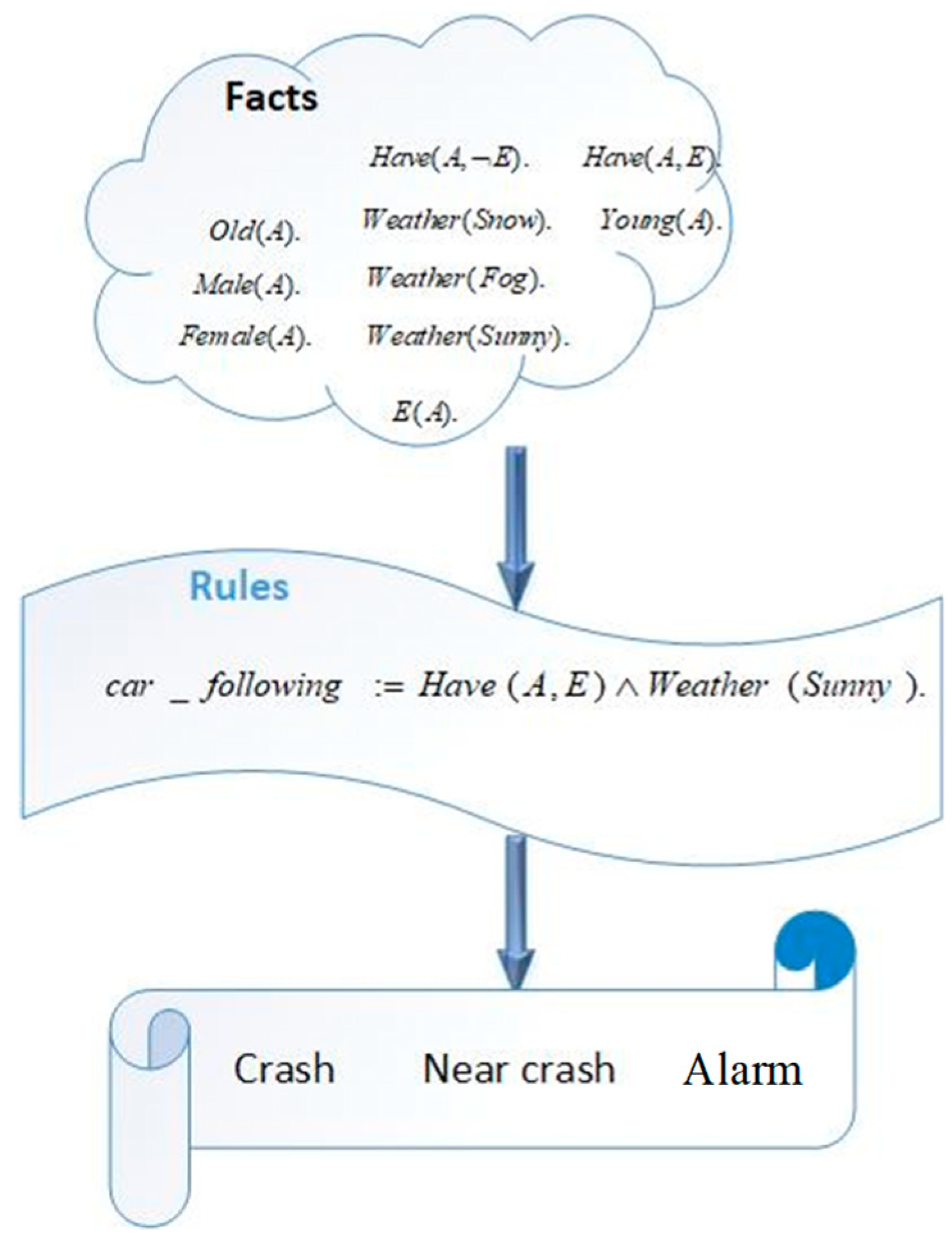
The primary objective of this research is to explore the potential benefits and challenges associated with integrating non-monotonic logic into AVs for car-following. This exploration considers human factors, driving behaviors, and external factors. The personalized cognitive agent establishes rules by defining relationships between human factors and driving behaviors and formulates logical statements based on facts to represent knowledge and infer new information, as illustrated in Figure 5.
The agent uses logical statements and facts to represent knowledge, which can come from various sources, including data, research, expert knowledge, and previous interactions with the driver. Logical statements are used to express the relationships among different variables or conditions, enabling the agent to make logical deductions based on the information provided. Facts are typically specific data points or pieces of information about the driver, the driver’s current state, the environment, and the vehicle. The agent uses the rules it formulated, the logical statements available, and facts to infer new information. In this context, inference refers to the process of drawing logical conclusions or making predictions based on the rules and the knowledge provided. The agent’s role is to reason and deduce how a driver’s human factors may lead to specific driving behaviors; for instance, it might infer that a tired driver is more likely to exhibit slower reaction times.
Figure 5.
Rule design.
4. Discussion and Analysis
This section discusses the modeling of causal dependencies between human factors and driving behavior during car-following with the aim of keeping a time headway (THW) (the time distance between a leading and a following vehicle). The data provide evidence on the heterogeneity of human driving profiles as the mean of the THW ranges from near 0 s to 5 s, and the minimum of THW ranges from near 0 s to more than 3 s. Based on these preliminary findings, we propose the definitions of three profiles:
- (i)
- ’aggressive’: a shorter car time headway, (0–2 s);
- (ii)
- ’inattentive’: a longer reaction time (2–3 s);
- (iii)
- ’normal’ for intermediate values of reaction time and car time headway (longer than 3 s), i.e., maintaining adaptive cruise control, which is expressed in terms of adaptive relative distance [m] and constant relative speed [m/s].
The definitions of the two non-normal driver profiles (aggressive inattentive) are formalized below.
- ○
- Aggressive driver profile: A driver i is considered to be aggressive with respect to a threshold t*, for the time headway THW if
where the time, T, (in seconds) = relative distance (m)/relative speed (m/s).
- ○
- Inattentive driver profile (a driver with a long reaction time): A driver i is considered to be inattentive (with a long reaction time) with respect to a threshold on the time headway THW if
- ○
- Normal driver profile: Drivers whose profiles are neither aggressive or inattentive are called normal. They have intermediate values for reaction time headway (e.g., <1 s).
4.1. The Combination of Human Factors and Driving Behaviors
Driving behavior is influenced by various human factors, and age, gender, and experience. It's essential to recognize that individual differences play a significant role in driving behavior, and not all individuals within a particular age group or gender will exhibit the same patterns. Young drivers (Teenagers and Early 20s) often exhibit riskier behavior due to their lack of experience and judgment. They may be more prone to speeding, distracted driving, and taking risks on the road. Middle-Aged Drivers (30s to 50s) has more experience and better judgment, leading to safer driving practices compared to younger drivers. However, physical changes associated with aging may start to emerge, affecting driving abilities. Some studies [3] have suggested that males tend to engage in riskier driving behaviors, such as speeding and aggressive driving. On the other hand, females may exhibit more cautious driving patterns and are often associated with fewer traffic violations. Inexperienced drivers are more likely to make errors and have difficulty handling challenging situations on the road. Lack of familiarity with road rules and traffic patterns can contribute to higher accident rates among new drivers. To provide a mathematical description of the correlations between driving behavior and human factors (age, gender, experience), we can use statistical methods, such as regression analysis. Regression analysis allows us to model the relationship between a dependent variable (e.g., driving behavior) and one or more independent variables (e.g., age, gender, experience) in a quantitative manner. We can then use multiple linear regression to create a model that predicts driving behavior based on age, gender, and experience. Mathematically, the multiple linear regression model can be written as:
Where, β0,β1,β2, and β3 are the coefficients of the model. ϵ is the error term. Based on a dataset with observations for different drivers, and the dependent variable representing safe driving behavior.
One of the significant factors that can lead to car-following accidents is not maintaining an appropriate time headway (THW). Time headway refers to the time interval between the front of one vehicle and the front of the vehicle immediately in front of it. If a driver fails to maintain a sufficient time headway, it reduces their ability to react to sudden changes in the speed or behavior of the lead vehicle. This lack of reaction time can result in rear-end collisions or other accidents, especially when the lead vehicle suddenly decelerates or stops. Time headway can be influenced by various factors, including speed, road conditions, weather, driver attentiveness, and reaction time. Tailgating, which is driving too closely behind the vehicle in front, is a common behavior associated with inadequate time headway and is a major risk factor for accidents. To mitigate the risk of car-following accidents related to time headway, drivers should maintain a safe following distance that allows enough time to react to any changes in traffic conditions. A mathematical formula for calculating the value of Mean_THW is based on the given variables. The formula for Mean_THW is a linear combination of various variables, each multiplied by a corresponding coefficient: Max_ax, this represents a measurement related to acceleration in the x-axis direction of a vehicle. Mean_LongDist_LeadVeh (LD_LV), these represents a measurement related to the mean of the longitudinal distance between the vehicle and the leading vehicle (vehicle directly in front). Mean_v_LeadVeh (v_LV), this represents a measurement related to the mean of the velocity of the leading vehicle.
Driving behaviors, such as time headway, speed, and acceleration, depend on human factors, such as age, gender, and experience on external factors, such as weather conditions. This paper focuses on human factors. The probability of an accident is expressed as follows:
The weight of each human factor is calculated in terms of naturalistic driving.
The personalized cognitive agent can estimate the likelihood of an accident based on minimization of the weights. The type of minimization objective function is referred to as a loss function, or cost function. Neural network learning algorithms are formulated with the use of a loss function. The goal is always to minimize errors in prediction L by minimizing the number of misclassifications with respect to all the training instances in a data set D containing feature–label pairs.
The cost function is a special type of function that helps to minimize error and approach the expected output as closely as possible. It uses two parameters to calculate error: one is the estimated output of the CNN model (also called the prediction); the other is the actual output. The mean squared error (MSE) is a loss function commonly used in various machine learning tasks, including regression problems. Other loss functions, such as the root mean square error (RMSE) and the mean absolute error (MAE), are also commonly used depending on the specific problem and requirements. Table 3 compares various machine learning schemes based on statistical measurements of error. The nearest neighbor and random forest algorithms provide better classification performance than the other, namely, the zeroR, NBN, and DT. Furthermore, these two schemes outperform the others for accuracy, as can be seen in their higher rating in the comparison graphs in Figure 6.
The nearest neighbor scheme is a classification algorithm that assigns a data point to the class most common among its k-nearest neighbors in the training dataset. The random forest scheme is an ensemble learning method that combines multiple decision trees to make predictions. It is known for its ability to handle high-dimensional data and capture complex relationships in the data.
5. Simulation Results
The causal relationship between human factors and driver behavior related to time headway is complex and influenced by various factors. Human factors can play a significant role in determining how drivers perceive, interpret, and respond to the need to maintain proper time headway. Figure 7 shows graphic samples of mean time headway values for aggressive, inattentive, and normal drivers. Aggressive drivers are inclined to follow vehicles closely and maintain shorter time headways. Experienced drivers often have a better understanding of lane discipline and the importance of staying within their designated lane. They are more likely to maintain a consistent and centered lane position. Inexperienced drivers may have a limited understanding of lane discipline which increases the risk of collisions. They may also find the acceleration of a vehicle thrilling or exhilarating, especially if it is their first time driving or if they are not yet accustomed to the sensation of speed. In addition, they may feel nervous or anxious during acceleration, particularly in situations where they are still learning to control the vehicle’s speed and acceleration smoothly. Young drivers between 20 and 24 years of age are statistically more likely to be involved in car accidents than older drivers, as illustrated in Figure 8. Several factors contribute to this increased risk, such as lack of experience, distracted driving and night-time driving. Figure 9 shows evidence that more females than males are involved in car accidents. Males are more likely to engage in risky driving behaviors, such as speeding, aggressive driving, not wearing a seat belt, and driving under the influence of alcohol or drugs, all of which increase the likelihood of an accident. Car accidents can vary in terms of their types and causes. Figure 10 shows several types of accidents plotted against age groups. One common type is “rear-end collisions”, where one vehicle collides with the rear of a preceding vehicle. These are typically associated with cars traveling in the same directions; they occur most often in traffic jams and during lane-changing maneuvers involving adjacent cars.
6. Conclusions
In conclusion, the incorporation of non-monotonic logic in Autonomous Vehicles (AVs) for car-following represents a promising avenue for enhancing safety, adaptability, and decision-making in dynamic traffic environments. Traditional rule-based systems and monotonic logic often struggle with exceptions, conflicting data, and context-dependent reasoning prevalent in car-following scenarios. Non-monotonic logic empowers AVs to overcome these limitations, fostering more robust and intelligent behavior. They can navigate uncertainties, adapt to changing conditions, and make plausible inferences based on incomplete or uncertain information.
The integration of non-monotonic logic also facilitates the modeling of non-monotonic dependencies in driver behavior, enabling AVs to respond effectively to unexpected actions, variable speeds, and context-specific behaviors exhibited by human drivers. This contributes to the improvement of safety, efficiency, and overall performance in autonomous driving systems. Additionally, safety can be further enhanced through the utilization of AI characteristics, including sensor fusion, perception, decision-making, predictive analytics, and continuous learning. AI enables vehicles to perceive their environment, make informed decisions, and monitor performance in real-time.
The combined use of non-monotonic logic and AI characteristics provides a comprehensive approach to developing safe cognitive AVs. However, ongoing research is essential to address challenges associated with integrating these functionalities in AVs. These challenges encompass interpreting and handling complex scenarios, validating and verifying non-monotonic reasoning, and developing robust and reliable AI algorithms. Future work aims to integrate features describing human factors and vehicle behavior to formulate cognitive hypotheses within a hierarchical cognitive Bayesian network, building upon the approach in [7] for recognizing vehicle behaviors such as car-following, lane-following, and lane-changing. Addressing these challenges will contribute to further improvements in the safety, reliability, and acceptance of AVs on our roads.
Funding
This study has been supported by Project 101076165 — i4Driving within Horizon Europe under the call HORIZON-CL5-2022-D6-18 01-03, which is programmed by the European Partnership on ‘Connected, Cooperative and Automated Mobility’ (CCAM).
Data Availability Statement
Data will be made available on request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yarlagadda, J.; Pawar, D.S. Heterogeneity in the Driver Behavior: An Exploratory Study Using Real-Time Driving Data. Hindawi J. Adv. Transp. 2022, 2022, 4509071. [Google Scholar] [CrossRef]
- Zhai, C.; Wu, W. A new car-following model considering driver’s characteristics and traffic jerk. Nonlinear Dyn. 2018, 93, 2185–2199. [Google Scholar] [CrossRef]
- Raiyn, J.; Weidl, G. Improving Autonomous Vehicle Reasoning with Non-Monotonic Logic: Advancing Safety and Performance in Complex Environments, 2023 IEEE International Smart Cities Conference, University POLITEHNICA of Bucharest, Romania on 24 – 27 September, 2023.
- Bouhsissin, S.; Sael, N.; Benabbou, F. Driver Behavior Classification: A Systematic Literature Review. IEEE Access 2013, 11, 14128–14153. [Google Scholar] [CrossRef]
- Weidl, G.; Madsen, A.L.; Wang, S.R.; Kasper, D.; Karlsen, M. Early and Accurate Recognition of Highway Traffic Maneuvers Considering Real-World Application: A Novel Framework Using Bayesian Networks. IEEE Intell. Transp. Syst. Mag. 2018, 10, 146–158. [Google Scholar] [CrossRef]
- Abdar, M.; Pourpanah, F.; Hussain, S.; Rezazadegan, D.; Liu, L.; Ghavamzadeh, M.; Fieguth, P.; Cao, X.; Khosravi, A.; Acharya, R.; et al. A Review of Uncertainty Quantification in Deep Learning: Techniques. Inf. Fusion 2021, 76, 243–297. [Google Scholar] [CrossRef]
- Bhargavi, R. Road Rage and Aggressive Driving Behavior Detection in Usage-Based Insurance Using Machine Learning. Int. J. Softw. Innov. 2019, 11, 1–29. [Google Scholar] [CrossRef]
- Wang, J.; Li, K.; Lu, X.-Y. Effect of Human Factors on Driver Behavior. In Advances in Intelligent Vehicles; Academic Press: Cambridge, MA, USA, 2013; pp. 111–155. [Google Scholar]
- Hiang, T.S.; Ming, G.L. Speeding driving behavior: Age and gender experimental analysis. MATEC Web Conf. 2016, 74, 30. [Google Scholar]
- Rousseeuw, P.J. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Nguyena, T.T. , Krishnakumaria, P., Calverta, S-C., Vub, H-L. Lintam H.(2019). Feature extraction and clustering analysis of highway congestion, Transportation Research Part C: Emerging Technologies, vol 100, March 2019, Pages 238-258. 20 March.
- Lee, D.; Guldmann, J.-M.; von Rabenau, B. Impact of Driver’s Age and Gender, Built Environment, and Road Conditions on Crash Severity: A Logit Modeling Approach. Int. J. Environ. Res. Public Health 2023, 20, 2338. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhang, L.; Lu, X.; Li, K. Driver Characteristics Based on Driver Behavior. In Ehsani; 2013.
- Oppenheim, M.; Parmet, I.; Oron-Gilad, Z.T. Can Driver Behavior Be Traced to Gender Role, Sex and Age? Adv. Transp. 2022, 60, 450–459. [Google Scholar] [CrossRef]
- Lee, D.; Guldmann, J.-M.; von Rabenau, B. Impact of Driver’s Age and Gender, Built Environment, and Road Conditions on Crash Severity: A Logit Modeling Approach. Int. J. Environ. Res. Public Health 2023, 20, 2338. [Google Scholar] [CrossRef] [PubMed]
- Shahverdy, M.; Fathy, M.; Berangi, R.; Sabokrou, R. Driver behavior detection and classification using deep convolutional neural networks. Expert Syst. Appl. 2020, 149, 113240. [Google Scholar] [CrossRef]
- Liu, X.-K.; Chen, S.-L.; Huang, D.-L.; Jiang, Z.-S.; Jiang, Y.-T.; Liang, L.-J.; Qin, L.-L. The Influence of Personality and Demographic Characteristics on Aggressive Driving Behaviors in Eastern Chinese Drivers. Psychol. Res. Behav. Manag. 2022, 15, 193–212. [Google Scholar] [CrossRef] [PubMed]
- Ley, H.; Sridharan, M. Integrating Non-Monotonic Logical Reasoning and Inductive Learning With Deep Learning for Explainable Visual Question Answering. Front. Robot. AI 2019, 6, 125. [Google Scholar] [CrossRef]
- Szalas, A. Decision-making support using non-monotonic probabilistic reasoning. In Intelligent Decision, Technologies 2019: Proceedings of the 11th KES International Conference on Intelligent Decision Technologies (KES-IDT 2019), Malta, 17–19 June 2019; Volume 142 of Smart Innovation, Systems and Technologies; Springer: Singapore; Volume 1, pp. 39–51. Volume 1.
- Raiyn, J.; Weidl, G. Naturalistic Driving Studies Data Analysis Based on a Convolutional Neural Network. In Proceedings of 9th international Conference on Vehicle Technology and Intelligent Transportation Systems, 2023; pp. 248–256, ISBN 978-989-758-652-1, ISSN 2184-495X.
- L3pilot Automation Driving. Available online: https://l3pilot.eu/ (accessed on 14 November 2023).
- Raiyn, J. (2021). Classification of Road Traffic Anomaly Based on Travel Data Analysis, International Review of Civil Engineering (IRECE), Vol. 12. No.6.
Figure 2.
System model.
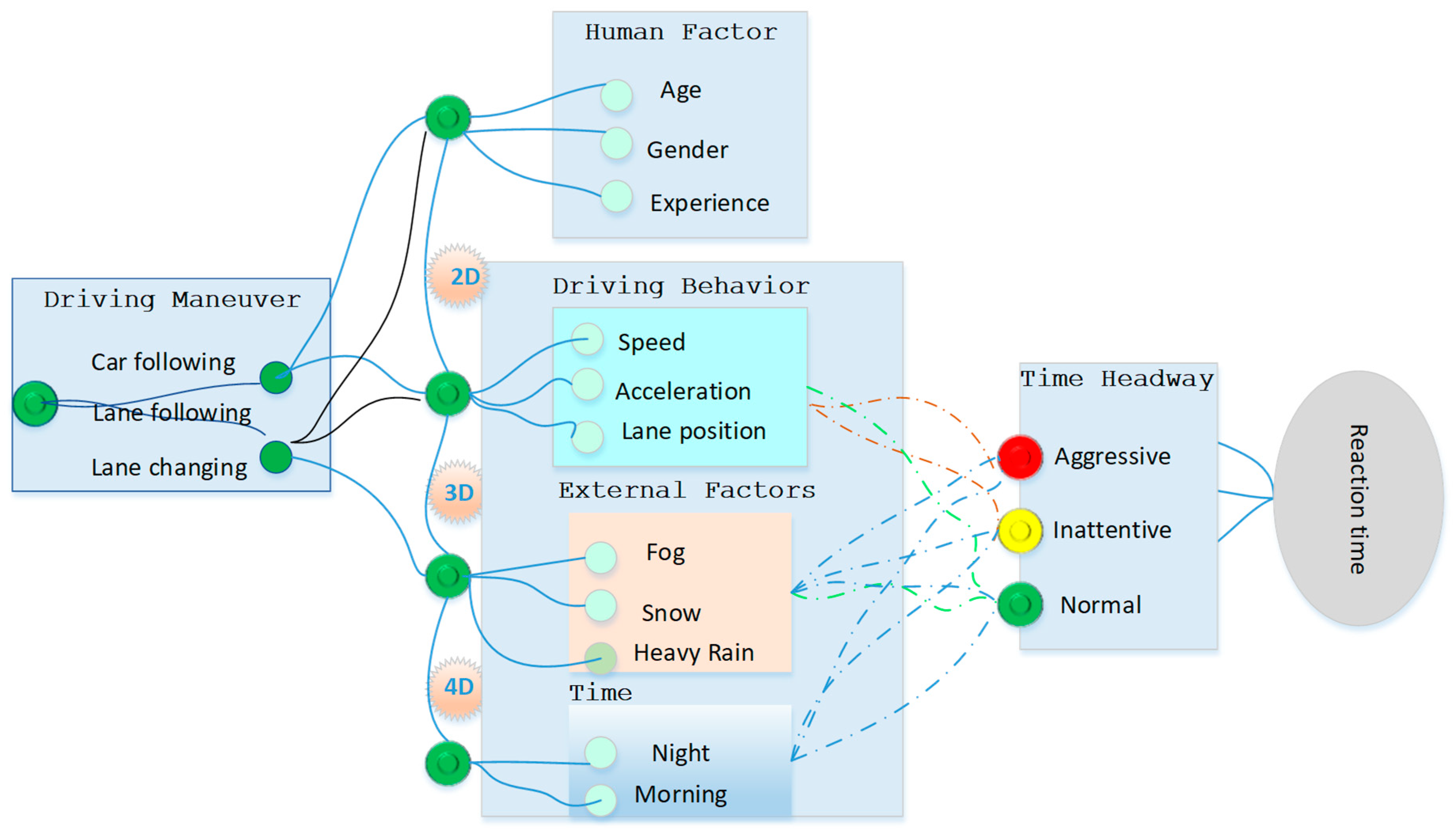
Figure 4.
Identification of driving behavior.
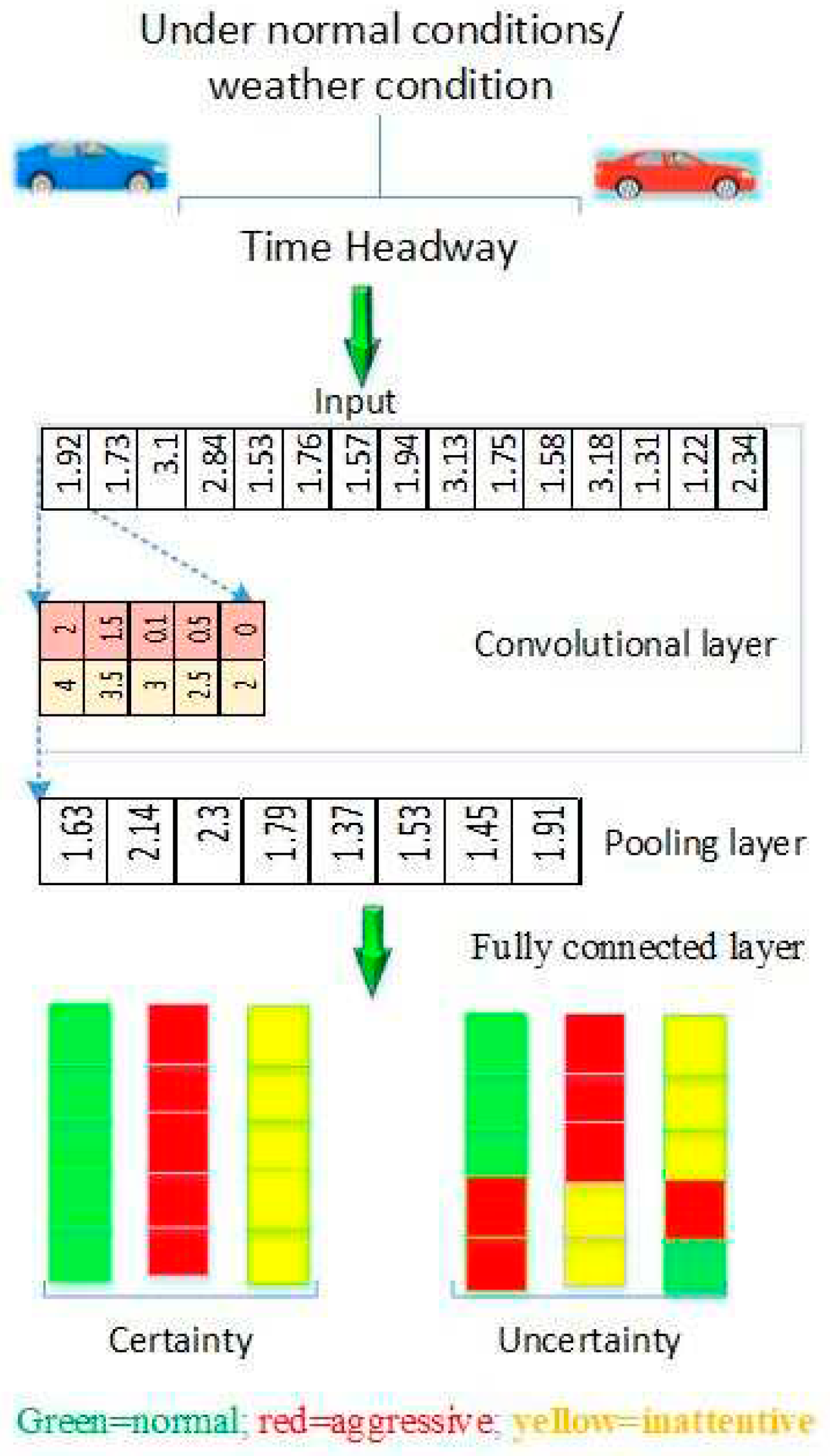
Figure 6.
Comparisons of ML schemes.
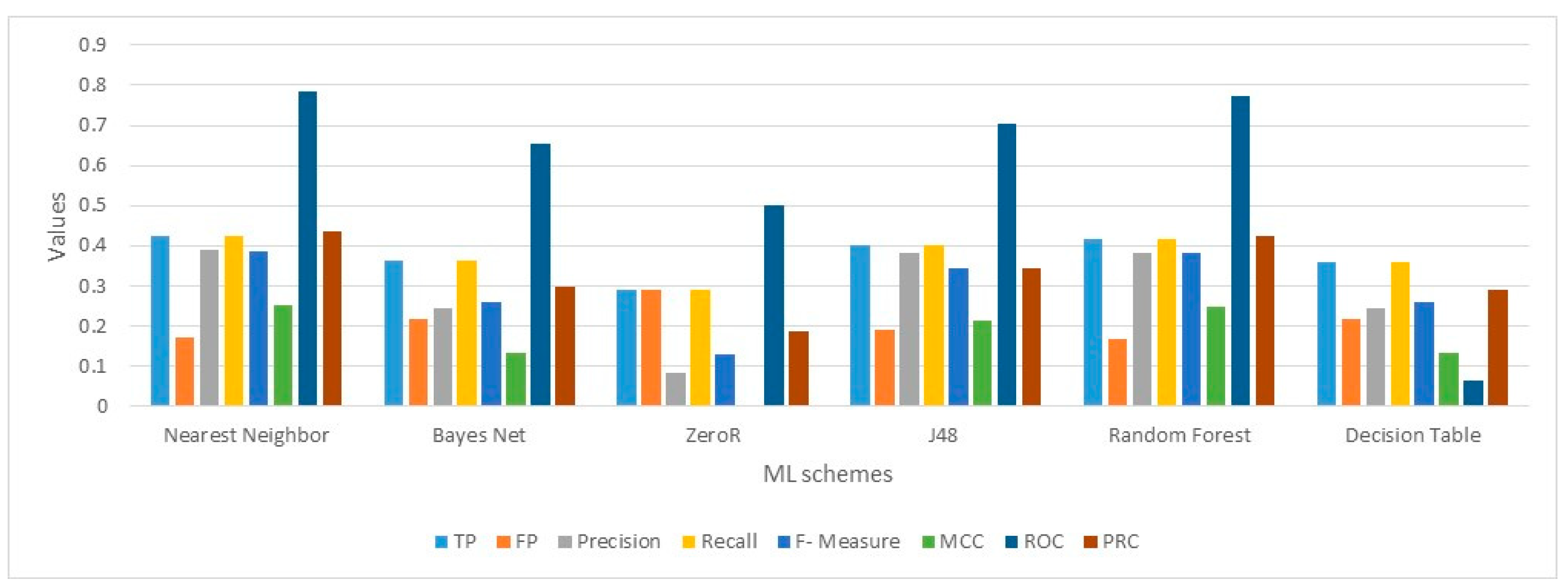
Figure 7.
Driver profiles.
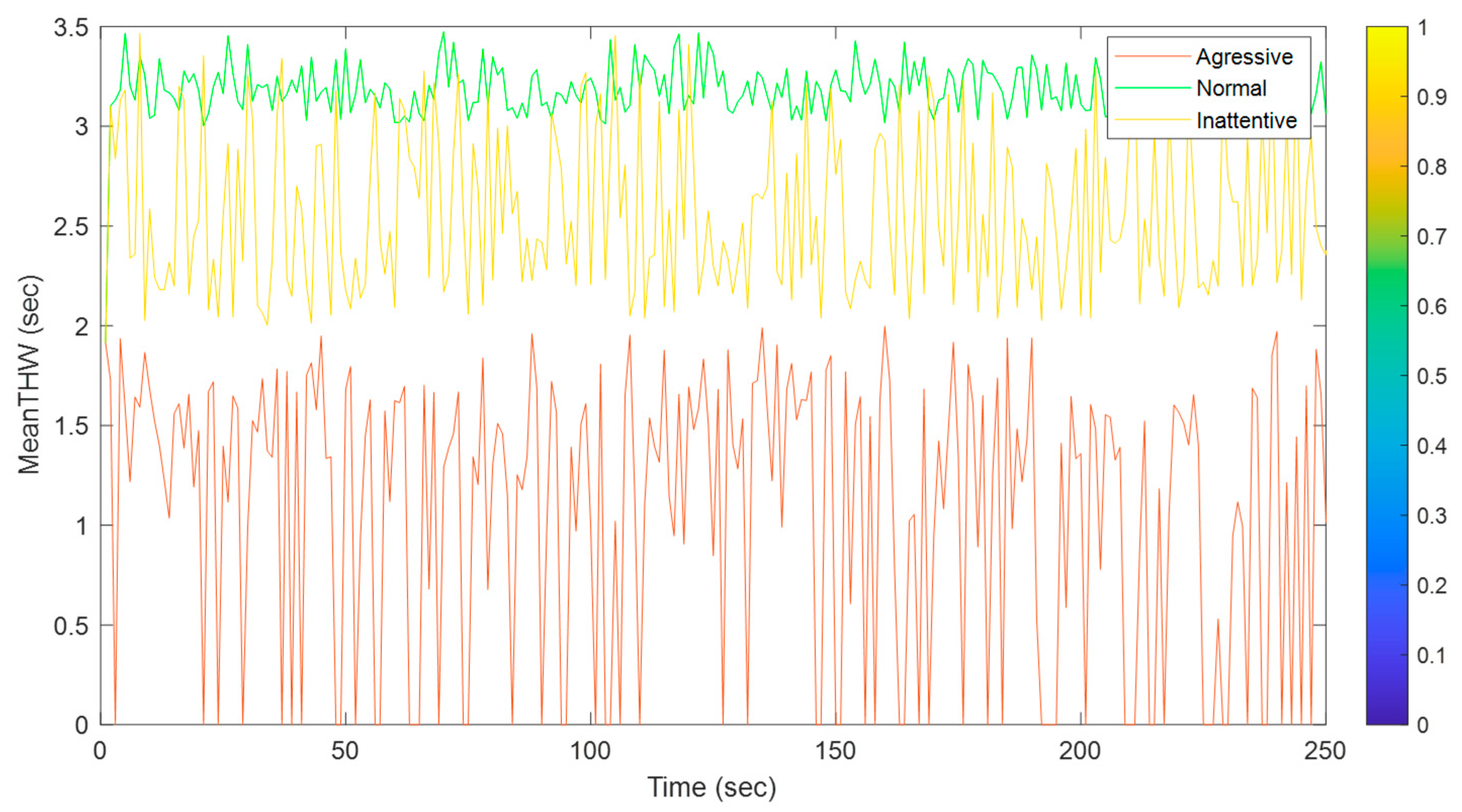
Figure 8.
Age versus number of accidents.
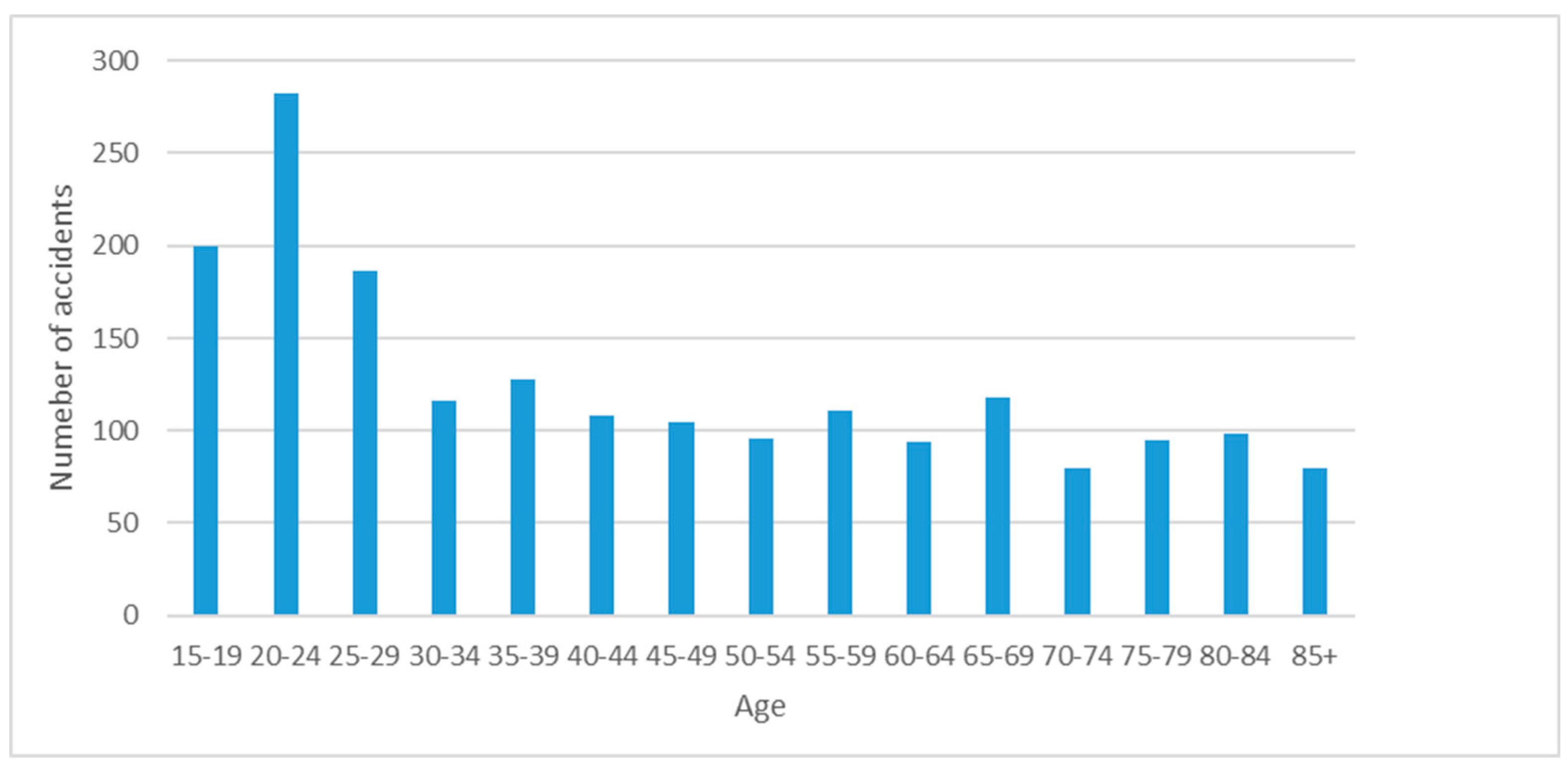
Figure 9.
Gender versus number of accidents.
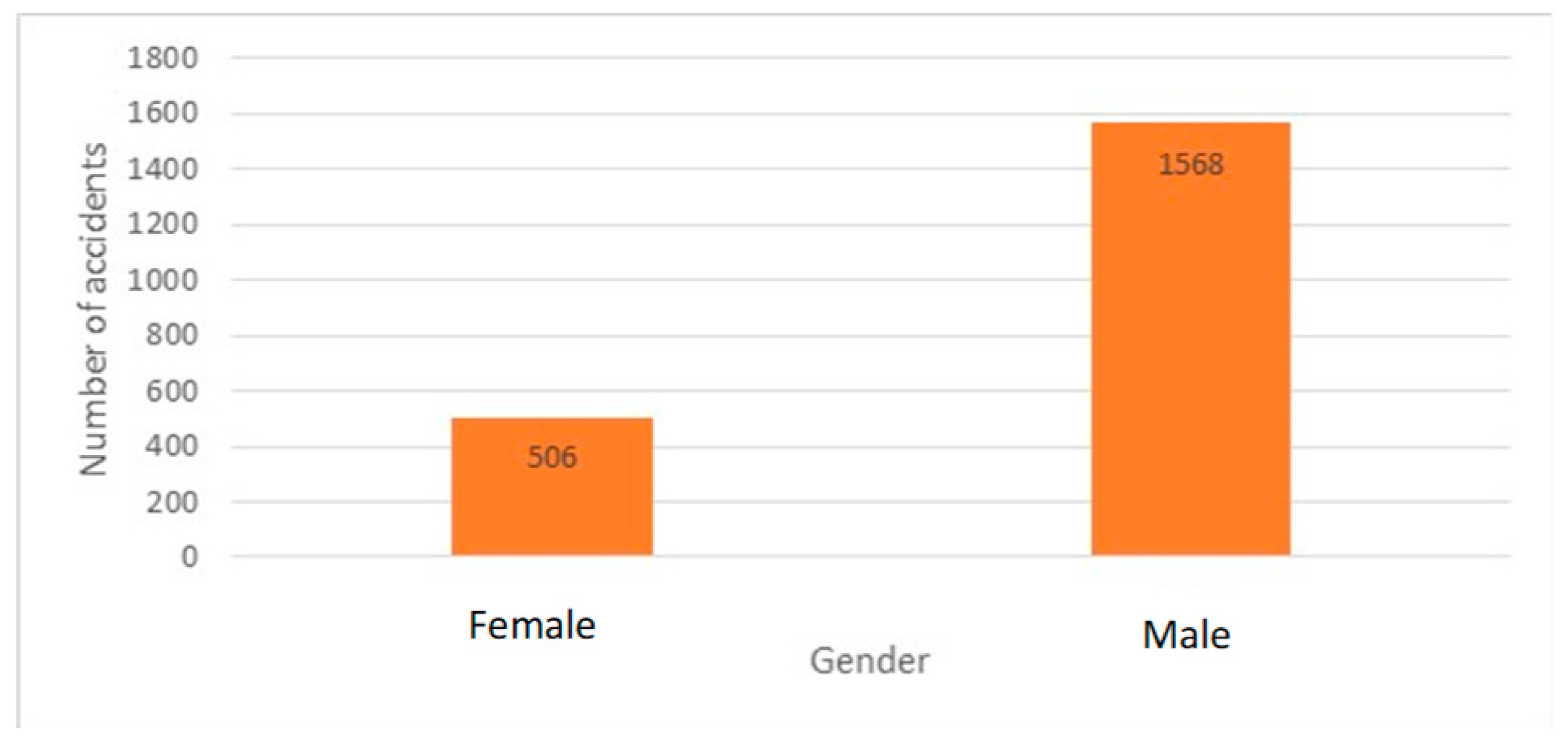
Figure 10.
Age versus type of accident.
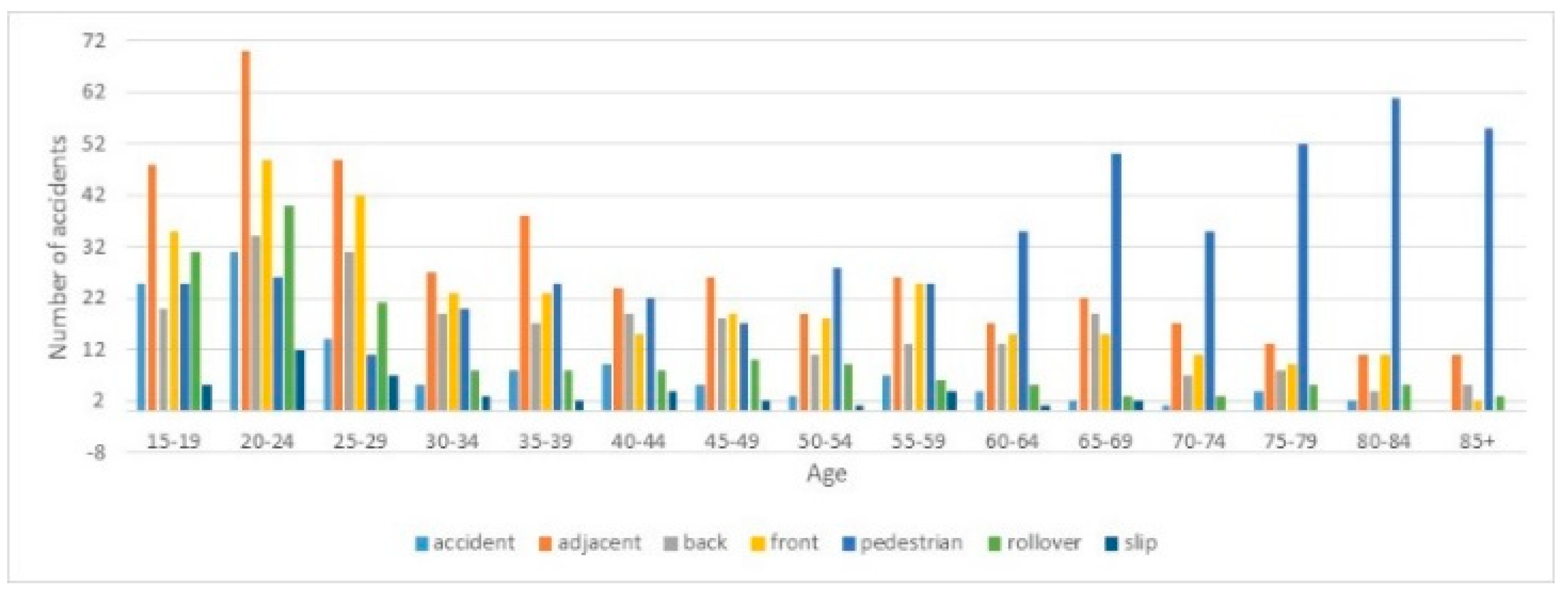

Table 1.
Summary of the main notation.
| Notation | Description | Symbol |
|---|---|---|
| Min_ax Max_ax SD_ax SD_ay Mean_v SD_v Max_abs_ay Max_v Mean_pos_in_line Mean_THW |
Minimum longitudinal acceleration Maximum longitudinal acceleration StDEV of longitudinal acceleration StDEV of lateral acceleration Mean speed Standard deviation of speed Maximum absolute lateral acceleration Max speed Mean position in lane Mean time headway |
min(ax) max(ax) sd(ax) sd(ay) m(v) sd(v) max(|ay|) max(v) sd(Pos in lane) m(THW) |
Table 2.
Alert truth table for inattentive (B), experienced (E), and aggressive (C) drivers.
| B | E | Alarm | C | E | Alarm |
| F | F | F | F | F | F |
| F | T | F | F | T | F |
| T | F | T | T | F | T |
| T | T | F | T | T | F |
| a) | b) | ||||
Table 3.
Statistical measurement of error.
| NN | NBN | zeroR | J48 | RF | DT | |
|---|---|---|---|---|---|---|
| MAE | 0.1687 | 0.186 | 0.200 | 0.182 | 0.169 | 0.190 |
| RMSE | 0.290 | 0.306 | 0.316 | 0.301 | 0.292 | 0.307 |
| RAE | 84.033 | 93.07 | 93.07 | 90.676 | 84.288 | 95.049 |
| RRSE | 91.663 | 96.83 | 96.83 | 95.241 | 92.274 | 96.950 |
MAE: Mean absolute error; RMSE: Root mean square error; RAE: Relative absolute error; RRSE: Root relative square error. RF: Random forest; DT: Decision Table; NN: Neural Network.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



