Submitted:
12 December 2023
Posted:
14 December 2023
You are already at the latest version
Abstract
Oceans cover about 70% of the Earth's surface, and about 95% remain unexplored for various reasons. Underwater wireless communication has been revolutionised with the help of Internet of Things networks. Recently, applications such as collecting marine data, marine monitoring, disaster prevention, historical exploration, oil and gas exploration, shipwreck exploration, maritime security, and monitoring of aquatic species and water pollution, and several applications have become possible. However, the problem of routing, information transfer, and resource preservation in the fluid underwater environment remains unsolved. In this research, we were looking for a solution to make routing more efficient, considering the various and practical criteria for the quality of service of the underwater IoT network. One of the outstanding features of this research is the possibility of dynamically weighing the parameters involved in routing and taking optimal and distributed decisions between network components. The proposed method has achieved acceptable results in terms of quality of service compared to recent methods.
Keywords:
Underwater
; Internet of Things
; Routing
; Quality of Service
; Decision Making
1. Introduction
With the increasing use of Internet of Things (IoT) applications, underwater acoustic sensor networks have become an essential part of this technology in marine science for researchers and marine-related industries. Nowadays, with the integration of telecommunication and computing platforms, this issue is also recognised as part of the more comprehensive underwater IoT problem for stationary and mobile sensors/actuators and underwater robots. Aquatic sea and ocean monitoring is vital due to their different military, environmental and industrial applications [1]. Previously, underwater communications focused mainly on physical layer communications and signal processing issues, and there was little networking discussion. Since applications such as aquatic environment monitoring are performed on a large scale, the need to expand the underwater network is inevitable [2]. Many of these sensors (sonar, optical instruments, laser, magnetic, etc.) are placed underwater to carry out the monitoring process. Expanding the monitoring environment requires properly analysing sensor output and networking [3]. Most underwater ecosystems are high-risk environments; therefore, the limited resources of the underwater sensor network need performance reliability and stability more than a conventional sensor network.
Routing protocols in networks are an essential and practical part of network performance [4]. Proposed protocols for underwater sensor networks can be divided into two general parts: location-based and location-independent routing protocols. We know that water currents and sea creatures move randomly; therefore, location-based routing protocols are unsuitable for underwater environments. On the other hand, using the GPS global positioning system in an aquatic environment is inadequate. In underwater wireless sensor networks, the nodes are often battery-powered, and it is impossible to recharge the battery; therefore, routing protocols must be optimised regarding power consumption to communicate between sensor nodes [5]. These protocols must be able to store energy and consume it reasonably in exchange for error-free communication and data transmission.
On the other hand, when the sensors collect the required information, they must send it to the water level’s base station. Transmitting data from sensor nodes to the base station is very expensive in terms of energy consumption; hence, energy consumption is one of the vital factors in designing routing protocols for underwater wireless sensor networks. There are many limitations to the underwater environment, and some of the most critical issues to consider when designing aquatic sensor network routing protocols and the UIoT platform include the following [6]:
- Energy issue: Energy is a limitation of the underwater sensor network, as batteries do not have solar energy to charge and are not easily replaced. Therefore, routing protocols should consider energy saving a critical element because the node is dead after the energy runs out and may cause the project to fail [6].
- Load Balancing: An optimal routing protocol uses network resources fairly and equitably. This approach can prevent the occurrence of bottlenecks or hotspots. Also, in case of such incidents, action should be taken to resolve the issue as soon as possible [7].
- Underwater Location: Underwater networks lack GPS location information, which is essential for reducing routing tables, locating neighbours, and preventing loops. The depth gauges on underwater nodes measure their depth based on the water level since GPS cannot be used in deep water. It is still a challenge to develop a routing protocol that uses only depth information and the neighbourhood list at the water level [8,9].
- Underwater sensor nodes are mobile and unstable due to environmental factors such as currents, collisions, and waves. Maintaining routing tables and paths makes it challenging, as the network topology constantly changes. Researchers are developing routing protocols that can adapt to node mobility and instability in the underwater environment [10].
- Lack of a fault detection system: If a failure or underwater network configuration problem occurs, it is not detected before retrieving and aggregating network data. This process may easily lead to the complete loss of the monitoring mission [11].
- Lack of real-time monitoring: Recorded data are unavailable at the base station until collection and processing. This process may occur several hours after each sampling [11].
The article discusses the need for underwater network protocols for real-time monitoring of ocean basins. Due to the unique challenges of the underwater environment, such as limited bandwidth and long delays, new, reliable and efficient protocols are needed. The paper’s authors adapted the RPL protocol, developed for the Internet of Things and LLN networks on the ground, to the underwater environment. They changed the physical, data, network, and transmission layers. The second part of this article discusses routing algorithms and methods in underwater sensor networks, along with challenges and limitations. Section 3 proposes the URPL protocol and compares it with other hybrid forms. The fourth section concludes with a discussion of future work and conclusions.
2. Underwater Internet of Things architectures and challenges
- A.
- UIoT Architecture
The architecture and structure of the underwater Internet of Things network are categorised based on their entities and how they interact and cooperate.
Some of the most critical categories of underwater Internet of Things networks include [12,13,14] (Table 1):
- B.
- Routing in UIoT
Routing in the underwater Internet of Things network is designed based on various metrics. This category is shown in Figure 1, and we have explained each type below.
- 1)
- Energy-based routing
The energy consumption of each node depends on the way of communication and signal processing load. The energy consumption of a node depends on three factors: distance, environmental factors and battery capacity. In other words, the protocols that are in the energy-based category are implemented on one or more of the mentioned factors [15].
Reactive routing: Reactive routing protocols find a path to the destination on demand when sending a packet. This saves bandwidth by not maintaining routing tables, but it can lead to delays if no way is known.
- Active routing: Active routing protocols maintain routing tables that describe the overall network topology. This allows for faster packet delivery but requires more overhead to keep the tables.
- Hybrid routing: Hybrid routing protocols combine reactive and active routing to achieve the best of both worlds. They may use different routing mechanisms within and between regions of the network.
- Cluster-based routing: Cluster-based routing groups nodes into clusters and elects a cluster head for each cluster. Cluster heads collect data from member nodes and forward it to the sink node. This saves energy by reducing the number of nodes that transmit data directly to the sink node.
- Depth-based routing: Depth-based routing is a popular method for underwater IoT networks. It selects the next forwarding node based on its depth, prioritising nodes closer to the sink node. This reduces the number of hop packets that must traverse to reach the sink node.
- RL-based routing: Reinforcement learning (RL) is a machine learning technique that allows agents to learn how to behave in an environment by trial and error. RL-based routing protocols use RL to learn how to route packets in a way that maximises performance metrics such as throughput and packet delivery ratio.
- Bio-inspired routing: Bio-inspired routing protocols are heuristic algorithms inspired by natural processes. Some examples include ant colony optimisation (ACO), honeybee-inspired routing (HIBR), and frog-inspired routing (FIR) [16].
- RB routing: Reliability-based routing protocols are designed to improve the reliability of data transmission in underwater IoT networks. They typically work by selecting relay nodes that are less likely to experience errors. One common approach is cooperative-reliability routing, in which multiple relay nodes forward each packet. This can improve the packet delivery ratio and increase the end-to-end Delay and duplicate data transmission [16].
- 2)
- Routing based on geographic information
Geographic routing is a simple and scalable protocol that forwards packets to the nearest neighbour to the destination. It can be combined with opportunistic routing (OR) to improve data delivery and reduce energy consumption. OR forwards packets to neighbours based on their priority, and it becomes the preferred mode for packet forwarding if all nodes in the geographic routing forwarding set fail to receive a packet [17,18]:
- Depth-based routing: only needs the depth of nodes to route packets, making it more straightforward and energy-efficient than methods that require complete location information.
- Location-based routing: it uses the geographic location of nodes to route packets, which can improve the efficiency and reliability of data transmission.
- Pressure-based routing: uses the water pressure at each node to determine its depth, making it a simple and effective way to route packets in underwater IoT networks.
- Sender-based routing: the sending node selects the next hop node based on its criteria and metrics, such as the remaining energy of the node or the distance to the destination.
- Cluster-based routing: groups nodes into clusters and elects a cluster head for each cluster. Cluster heads are responsible for routing packets between nodes in their cluster and between clusters. This method can improve the scalability and efficiency of routing in large networks.
- 3)
- Data-driven routing
In this network, data is different depending on the type of application and often has other priorities. This sensor network has distinctions between information data in different areas. When an event occurs, the cluster of nodes in the area is notified and starts collecting data, which is subsequently sent to the sink for preparation. The data routing criterion in these networks is based on the priority and expiration time of packets [18].
- Direction-based routing: This method takes into account the direction of the packet movement in the path to improve data transmission efficiency.
- Flood routing: This is a simple and efficient routing method that does not require network topology or computational routing maintenance. It works by flooding the network with packets until they reach the destination node. This method is fault-tolerant but can also lead to resource wastage and internal message disclosure.
- C
- Recent QoS-based routing Protocol in UIoT
Recent research on clustering protocols for underwater IoT networks has neglected energy-aware trajectory planning and control for AUVs. Clustering approaches should be improved by considering various aspects, such as dynamic characteristics of underwater objects, node position, energy, traffic load, distance from cluster head, and transmission strategy. Researchers have analysed various aspects of routing protocols, including clustering, localisation topology, route planning, and queue-based approaches [19] (Table 2).
- [20] An underwater sensor network using AUVs was introduced to save energy and enhance data collection. They designed efficient algorithms for this purpose, but based on a greedy approach, their cluster head selection method can slow down the process, requiring additional computation.
- [21] Proposed a dataset using multiple AUVs in heterogeneous IoUT networks with optimisation (AoI). The proposed scheme uses a queuing model to enable information exchange between several AUVs and a low-complexity adaptive algorithm to control queue length and AUV energy constraints.
- [22] has devised an energy-efficient and low-latency data routing protocol for IoT networks. This protocol considers critical factors, including the energy levels of nodes, data transmission distance, data size, and available routing options. Considering these variables, the protocol ensures that data follows the most efficient path and avoids burdening nodes with limited energy.
- [23] has developed a new way to save energy in IoT networks by fixing network holes caused by long distances between nodes. The new algorithm uses a guard-based flooding scheme to fill the gaps, which is more efficient than other methods.
- [24] has proposed a new routing protocol for underwater sensor networks that is more energy-efficient than other protocols. The new protocol uses multi-hop communication and underwater relay nodes to transmit data, reducing the energy each node needs to consume. The new protocol has also been shown to provide the lowest total energy consumption compared to other well-known protocols.
- [25] has developed new routing protocols for underwater IoT devices that improve energy efficiency and QoS. These protocols use a clustering approach to group devices and opportunistic routing to transmit data between clusters. The new protocols have been shown to outperform current protocols in terms of both energy efficiency and QoS.
- The DSPR protocol is a new approach to underwater IoT networks that aims to improve energy efficiency and reliability. It does this by using directional routing and selective power control. However, more testing is needed to see how well it works in real-world environments [26].
- In [27] propose a new technique for localisation of underwater IoT devices that combines magnetic, optical, and audio communications. This technique is more accurate than previous techniques, but more research is needed to develop practical implementations.
- In [28], a new clustering protocol for underwater IoT networks that uses the k-means algorithm to select cluster heads is proposed. This protocol is simple and effective, but more research is needed to compare it to other clustering protocols specifically designed for underwater IoT networks.
3. The Proposed Method
The proposed objective function creates the network graph formation steps dynamically. In the basic RPL protocol, the hop or rank of the nodes is usually the criterion for graph formation. For example, in the RPL network, the base objective function is programmed on the number of steps from the base station, and the considered steps are calculated in two-dimensional space. Nevertheless, to solve this issue, we have made the network into the desired categories in Figure 2. The fact that exists in the underwater network is that it is wrong to use the depth criterion alone or to stratify based on the depth of the network in 3D space. In these networks, the classification criterion must be spherical because half of the spherical space will be underwater due to the location of the base station on the surface of the water.
Thus, the proposed method’s initial graph is formed by combining three parameters: hops to the root, node depth from water level, and ARSSI rate. Therefore:
- The sink node broadcasts the DIO packet to all nodes in the underwater network environment.
- Nodes within radio range of the well receive the DIO packet from the well and send the DAO packet to the well, which includes the well’s depth and the link ARSSI rate.
- The sink node sends DAO-Ack packets to the first-level nodes because it has unlimited one-hop children.
- In the DIO packet, the parent nodes update their hop values, depth, and ARSSI rate for the well.
- Upon receiving the DIO packet from the available parents, each network node compiles a list in its memory, and the list is updated in response to the values sent by the parents.
- In the case of a child node, the membership request packet is sent to selected parents (more than one parent, if possible). Additionally, the DAO packet contains information regarding the depth of the child node and the level of ARSSI received from the parent node.
- As soon as the parent nodes receive the DAO packet, they send the DAO-Ack packet to any child nodes whose quality level is greater than the threshold value.
- As in step 4, the child nodes will continue in the next step after receiving the DAO-Ack packet. As the network graph progresses, this process will continue.
The network graph is formed during this step, and the nodes are informed of their one-step neighbours.
Dynamic in the network means each node has a different value according to its position in the network graph. In this way, the energy of the nodes close to the base station should be maintained optimally so that the communication between other nodes of the network with the well is not jeopardised. On the other hand, it is almost impossible to determine the value of each node in the network due to the lack of access to the geographic location and additional information on the network map, or it is done with very high computational overhead and routing tables. For this purpose, we have placed each node in a specific category by proposing a sector. The value of each of the effective metrics of the network is different according to the node’s location (in which sector it is located).
Based on calculations and performing multiple simulations and variance of the value of each parameter, the values listed in Figure 3 have been obtained. R is the rate of approximation of the relationship Y of each equation with the real data. In other words, for the parameters of Energy, PDRLink, ETX rate and Delay in each sector, a different value is inserted according to the Y relationship for node a. In each node, for being in the corresponding sector, the corresponding coefficients for each parameter of Energy, PDRLink, ETX rate and Delay are obtained so that the value of the decision system of the node is proportional to the node’s location in the network.
- A.
- Routing in the proposed network
Routing is the central pillar of data transfer in the Internet of Things. Without a logical mechanism aware of the network’s resources and capacity, data transfer is associated with a high resource consumption overhead or, in some applications, seems impossible. Multi-path mechanisms are used on the Internet of Things to improve network reliability and minimise bottlenecks or hotspots. In this section, we propose a quality service-aware approach in the underwater sensor network that can achieve acceptable efficiency with minimal consumption of network resources. This design can combine all the effective parameters according to the network’s needs and determine each parent’s final value and priority for the nodes. After forming the network graph in the first step, each node has a list in its memory, the importance of which will be updated periodically. This list is assigned to the status of available parents for the node whose maximum number of parents in this list is limited to ķ = 4 because, according to tests, more than a fixed number of parents per node increases congestion, hidden terminals, and requires more complex calculations. Table 3 shows this list of parents.
In the section on prioritising parent nodes, a multi-criteria decision-making system has been used for optimal selection by children. In this approach, each parent node is weighted based on the parameters of the Sector, Energy, ARSSI rate, latency, ETX, link delivery rate, and depth in the decision system and will obtain their final value in combination. In Figure 4, the steps for calculating the decision system are given.
Finally, the values for each parent node in the children list will be updated, and if the nodes move, the ARSSI value will be updated separately at a higher sampling rate. Equations 1 and 2 give the decision of how to calculate the system.
According to the simulation time and by reducing the network resources, the weight of the effective parameters in the simulation will be updated according to Figure 3.
- B.
- Simulation results
To evaluate and compare the proposed method with recent methods such as VHARA [29], EDAR [30], OMUS-D [31], and ALRP [32], NS simulation version 2.31 and Aquasim package version 2 were used. The beam widths of each underwater sensor node varied between 0 and 360 degrees. The radio range of the sensor node was 150 meters, and the radio range of the sink was 200 meters. Network nodes were randomly distributed in the underwater environment (Table 4).
- 1)
- Network Lifetime
It is important to evaluate an underwater network’s lifespan because when the nodes’ energy runs out, the link fails, and the monitoring operation fails. Many studies measure network lifespan by the time of death of the first and middle nodes. Unbalanced network power consumption will accelerate this time. Due to network graphs and quality of service routing awareness, the proposed URPL method has been able to record better results. Network convergence increases grid life and energy efficiency by reducing node separation, fruitless efforts, and energy loss.
URPL network first and middle node death time (FND and HND) comparison with other methods is shown in Figure 5, with an increase of the time of death of the first node in the URPL network method of 11, 9 and 8 per cent, respectively, if traffic rate λ= 0.1 pkt/s, and 13, 15 and 11 per cent at traffic rate λ= 0.2 pkt/s, respectively.
In this test, the average network lifetime is another test to determine if grid energy consumption is fair and trending after 900 seconds. The first network node’s time of death was used to calculate the test. Deflaying the first node’s death will make the method more efficient at balancing and resolving energy consumption bottlenecks or hotspots. Equation 3 determines the time of death of the first node and the Average Lifetime Network (ALTN) [33,34]:
where ti is the time of death of node i, N is the total number of nodes in the network, M is the number of nodes surviving at the end of the simulation and ℘ is the predefined lifetime of the network. In Figure 6, node lifetimes have increased in URPL compared to other methods with an input traffic rate of λ = 0.1 ~ 0.2.
- 2)
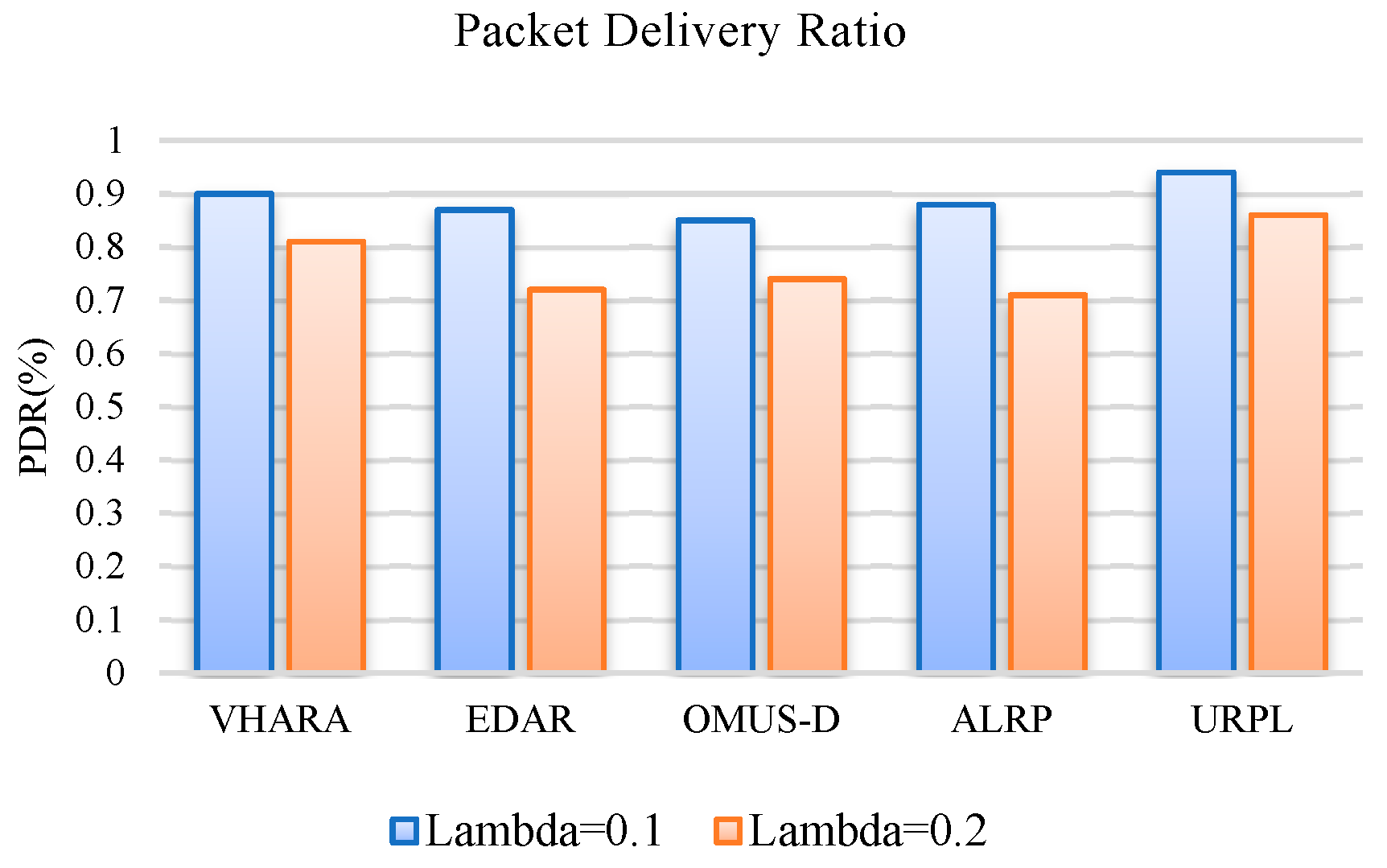
- Packet Delivery Ratio
The packet delivery rate test evaluates how efficiently the proposed protocol routes and transfers data from network nodes. By improving the network graph formation process and adding a multi-route protocol, the proposed method presented better results than other methods at traffic rates of λ = 0.1 pkt/s and λ = 0.2 pkt/s. This was achieved by reducing link failure rates, increasing neighbours’ list stability, and considering flexible schedules. In contrast, increasing the network’s lifetime increased the nodes’ active time. An indicator of network stability and reliability is the number of packets successfully received at the destination relative to the number sent from the source node. Equation 4 calculates this process.
Figure 7.
Packet delivery ratio.
- 3)
- End-to-End Delay
A third criterion is the end-to-end latency of network packets for underwater sensor networks. Generally, the lower and more convergent the average latency of network packets, the better the network monitors the environment. This network criterion can also be indicated by reducing the Jitter rate. In the URPL, the average end-to-end latency rate compared to VHARA, EDAR, OMUS-D, and ALRP methods shows a minimum of 3% and a maximum of 7% improvement (Figure 8).
- 4)
- Network Convergence Time
The setup time of any network, or the convergence of its graph and routes, is the time between the nodes starting to operate until the first successful packet reaches the network. There is a trade-off between network graph connection time and computations and active data exchange time on the network. Graphs and network routes can also be more accurate, reducing future computational overhead. As a result, the proposed method should consider both fronts reasonably. After sending the start packet, the nodes request an opportunity to form the desired topology. Despite its positive results in previous tests, the proposed method requires a longer convergence time in the first run, as shown in Figure 9. The proposed methods, however, reduced convergence, local repairs, and neighbour detection process times as the protocol continued.
4. Conclusion
Efficient platforms are needed in the underwater environment to increase lifetime and reduce latency in time-sensitive applications. Using a multi-criteria decision system, we presented a set of effective parameters for forming, maintaining, and repairing network topology. A multi-route mechanism reduced network traffic load and effectively balanced load. Topology control and network graph repair were improved using decision systems with low computational load. URPL shows optimal performance and efficiency when compared with recent methods. Our study improved network lifetime, increased delivery rates, and reduced end-to-end latency. Due to data aggregation challenges in the underwater IoT network, we will propose an energy consolidation model and efficient Delay using URPL methods.
References
- Y. Alharbi and A. Ahmad, "Underwater Internet of Things to Analyse Oceanic Data," IETE J. Res., pp. 1–14, Feb. 2022. [CrossRef]
- D. R. K. Mary, E. Ko, S.-G. Kim, S.-H. Yum, S.-Y. Shin, and S.-H. Park, "A Systematic Review on Recent Trends, Challenges, Privacy and Security Issues of Underwater Internet of Things," Sensors, vol. 21, no. 24, p. 8262, Dec. 2021. [CrossRef]
- E. Ko, D. Raj, S.-Y. Shin, S.-G. Kim, and S.-H. Park, "International Standardization for Maritime, Underwater Internet of Things and Digital Twin Applications," in The 15th International Conference on Underwater Networks & Systems, New York, NY, USA: ACM, Nov. 2021, pp. 1–2. [CrossRef]
- H. Chen, Y. Zhu, W. Zhang, K. Wu, and F. Yuan, "Underwater Acoustic Micromodem for Underwater Internet of Things," Wirel. Commun. Mob. Comput., vol. 2022, pp. 1–20, Sep. 2022. [CrossRef]
- E. Ko, K. M. R. Delphin, S.-Y. Shin, H. Choe, and S.-H. Park, "Underwater Internet of Things: Standardization Strategy," in 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), IEEE, Oct. 2022, pp. 1852–1854. [CrossRef]
- S. A. H. Mohsan, Y. Li, M. Sadiq, J. Liang, and M. A. Khan, "Recent advances, future trends, applications and challenges of internet of underwater things (iout): a comprehensive review," J. Mar. Sci. Eng., vol. 11, no. 1, p. 124, 2023.
- M. Ayaz, M. Ammad-Uddin, Z. Sharif, M. Hijji, and A. Mansour, "A hybrid data collection scheme to achieve load balancing for underwater sensor networks," J. King Saud Univ. Inf. Sci., vol. 35, no. 3, pp. 74–86, 2023.
- Pourkabirian, F. Kooshki, M. H. Anisi, and A. Jindal, "An accurate RSS/AoA-based localisation method for internet of underwater things," Ad Hoc Networks, vol. 145, p. 103177, 2023.
- Y. Wang, S. Song, X. Guo, J. Liu, Q. Ye, and J. Cui, "An Efficient Localisation Scheme With Velocity Prediction for Large-Scale Underwater Acoustic Sensor Networks," IEEE Internet Things J., 2023.
- S. A. H. Mohsan, A. Mazinani, N. Q. H. Othman, and H. Amjad, "Towards the internet of underwater things: a comprehensive survey," Earth Sci. Informatics, pp. 1–30, 2022.
- Sazzad, N. Nawer, M. Mahbub Rimi, K. Habibul Kabir, and K. Foysal Haque, "Designing of an Underwater-Internet of Things (U-IoT) for Marine Life Monitoring," in The Fourth Industrial Revolution and Beyond: Select Proceedings of IC4IR+, Springer, 2023, pp. 291–303.
- S. Sandhiyaa and C. Gomathy, "A Survey on underwater wireless sensor networks: challenges, requirements, and opportunities," in 2021 Fifth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud)(I-SMAC), IEEE, 2021, pp. 1417–1427.
- R. Habibiyan and A. Ghorban Sabbagh, "Connectivity analysis of 2D underwater optical wireless sensor networks using a geometric approach," Ad Hoc Networks, vol. 134, p. 102910, Sep. 2022. [CrossRef]
- Bello and S. Zeadally, "Internet of underwater things communication: Architecture, technologies, research challenges and future opportunities," Ad Hoc Networks, vol. 135, p. 102933, 2022.
- Ragavi, V. Baranidharan, A. John Clement Sunder, L. Pavithra, and S. Gokulraju, "A Comprehensive Survey on Different Routing Protocols and Challenges in Underwater Acoustic Sensor Networks," Recent Adv. Metrol., pp. 309–320, 2023.
- I. Shovon and S. Shin, "Survey on Multi-Path Routing Protocols of Underwater Wireless Sensor Networks: Advancement and Applications," Electronics, vol. 11, no. 21, p. 3467, 2022.
- M. Nain and N. Goyal, "Localisation techniques in underwater wireless sensor network," in 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), IEEE, 2021, pp. 747–751.
- J. Jiang, G. Han, and C. Lin, "A survey on opportunistic routing protocols in the Internet of Underwater Things," Comput. Networks, vol. 225, p. 109658, Apr. 2023. [CrossRef]
- E. S. Ali, R. A. Saeed, I. K. Eltahir, and O. O. Khalifa, "A systematic review on energy efficiency in the internet of underwater things (IoUT): Recent approaches and research gaps," J. Netw. Comput. Appl., vol. 213, p. 103594, Apr. 2023. [CrossRef]
- X. Zhuo, M. Liu, Y. Wei, G. Yu, F. Qu, and R. Sun, "AUV-Aided Energy-Efficient Data Collection in Underwater Acoustic Sensor Networks," IEEE Internet Things J., vol. 7, no. 10, pp. 10010–10022, Oct. 2020. [CrossRef]
- Z. Fang, J. Wang, C. Jiang, Q. Zhang, and Y. Ren, "AoI-Inspired Collaborative Information Collection for AUV-Assisted Internet of Underwater Things," IEEE Internet Things J., vol. 8, no. 19, pp. 14559–14571, Oct. 2021. [CrossRef]
- W. Xu, R. He, and C. Yu, "Energy Efficient Routing for Multi-modal Underwater Wireless Sensor Networks," in 2021 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), IEEE, Jun. 2021, pp. 516–520. [CrossRef]
- U. Draz et al., "Energy efficient watchman based flooding algorithm for IoT-enabled underwater wireless sensor and actor networks," ETRI J., vol. 43, no. 3, pp. 414–426, Jun. 2021. [CrossRef]
- K. Bhattacharjya, S. Alam, and D. De, "CUWSN: energy efficient routing protocol selection for cluster based underwater wireless sensor network," Microsyst. Technol., vol. 28, no. 2, pp. 543–559, Feb. 2022. [CrossRef]
- V. G. Menon, D. Midhunchakkaravarthy, A. Sujith, S. John, X. Li, and M. R. Khosravi, "Towards Energy-Efficient and Delay-Optimized Opportunistic Routing in Underwater Acoustic Sensor Networks for IoUT Platforms: An Overview and New Suggestions," Comput. Intell. Neurosci., vol. 2022, 2022.
- D. R. Kesari Mary, E. Ko, D. J. Yoon, S.-Y. Shin, and S.-H. Park, "Energy Optimisation Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions," Water, vol. 14, no. 20, p. 3240, Oct. 2022. [CrossRef]
- R. A. Khalil, N. Saeed, M. I. Babar, T. Jan, and S. Din, "Bayesian Multidimensional Scaling for Location Awareness in Hybrid-Internet of Underwater Things," IEEE/CAA J. Autom. Sin., vol. 9, no. 3, pp. 496–509, Mar. 2022. [CrossRef]
- L. Li, Y. Qiu, and J. Xu, "A K-Means Clustered Routing Algorithm with Location and Energy Awareness for Underwater Wireless Sensor Networks," Photonics, vol. 9, no. 5, p. 282, Apr. 2022. [CrossRef]
- M. H. Saleh, H. Takruri, and N. Linge, "Energy aware routing protocol for sparse underwater acoustic wireless sensor network," in 2022 13th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), IEEE, Jul. 2022, pp. 750–755. [CrossRef]
- J. M. Alostad, N. Alkateeb, E. Sultan, and H. K. Ebraheem, "IOUT Enabled Underwater WSN Using Dynamic Adaptive Routing Protocol with Improved Reliability," J. Commun., vol. 15, no. 8, pp. 607–612, 2020. [CrossRef]
- R. W. L. Coutinho and A. Boukerche, "OMUS: Efficient Opportunistic Routing in Multi-Modal Underwater Sensor Networks," IEEE Trans. Wirel. Commun., pp. 1–1, 2021. [CrossRef]
- Q. Wang, J. Li, Q. Qi, P. Zhou, and D. O. Wu, "An Adaptive-Location-Based Routing Protocol for 3-D Underwater Acoustic Sensor Networks," IEEE Internet Things J., vol. 8, no. 8, pp. 6853–6864, Apr. 2021. [CrossRef]
- M. H. Homaei, S. S. Band, A. Pescape, and A. Mosavi, "DDSLA-RPL: Dynamic Decision System Based on Learning Automata in the RPL Protocol for Achieving QoS," IEEE Access, vol. 9, pp. 63131–63148, 2021. [CrossRef]
- V. Moghiss, M. R. Meybodi, and M. Esnaashari, "An intelligent protocol to channel assignment in wireless sensor networks: Learning automata approach," in 2010 International Conference on Information, Networking and Automation (ICINA), IEEE, Oct. 2010, pp. V1-338-V1-343. [CrossRef]
- M. Al-Bzoor, A. Musa, K. Alzoubi, and T. Gharaibeh, "A Directional Selective Power Routing Protocol for the Internet of Underwater Things," Wirel. Commun. Mob. Comput., vol. 2022, pp. 1–13, Feb. 2022. [CrossRef]
Figure 1.
Classification of routing protocols in UIoT.
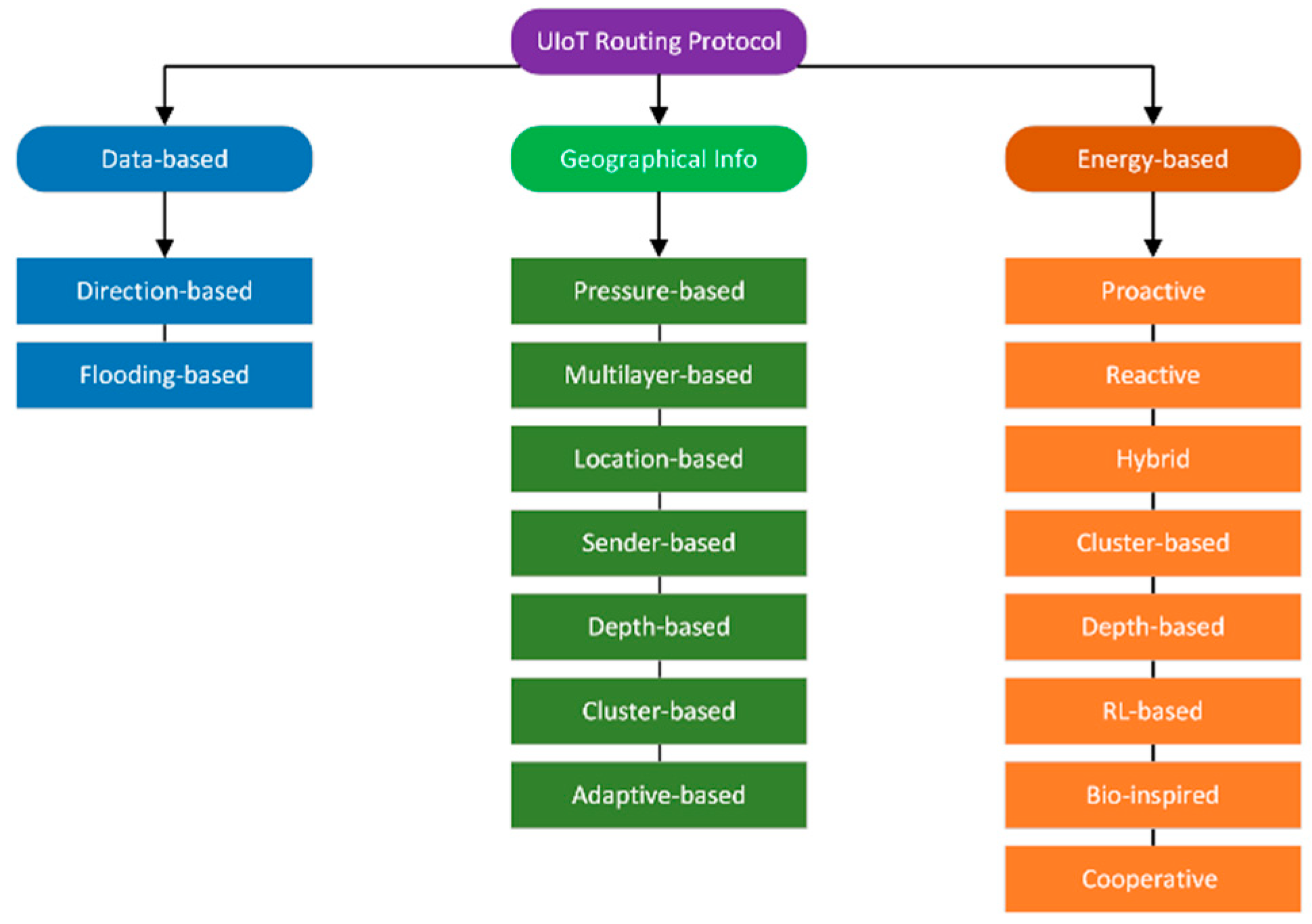
Figure 2.
Node placement and categorisation based on 3D underwater Euclidean distance.
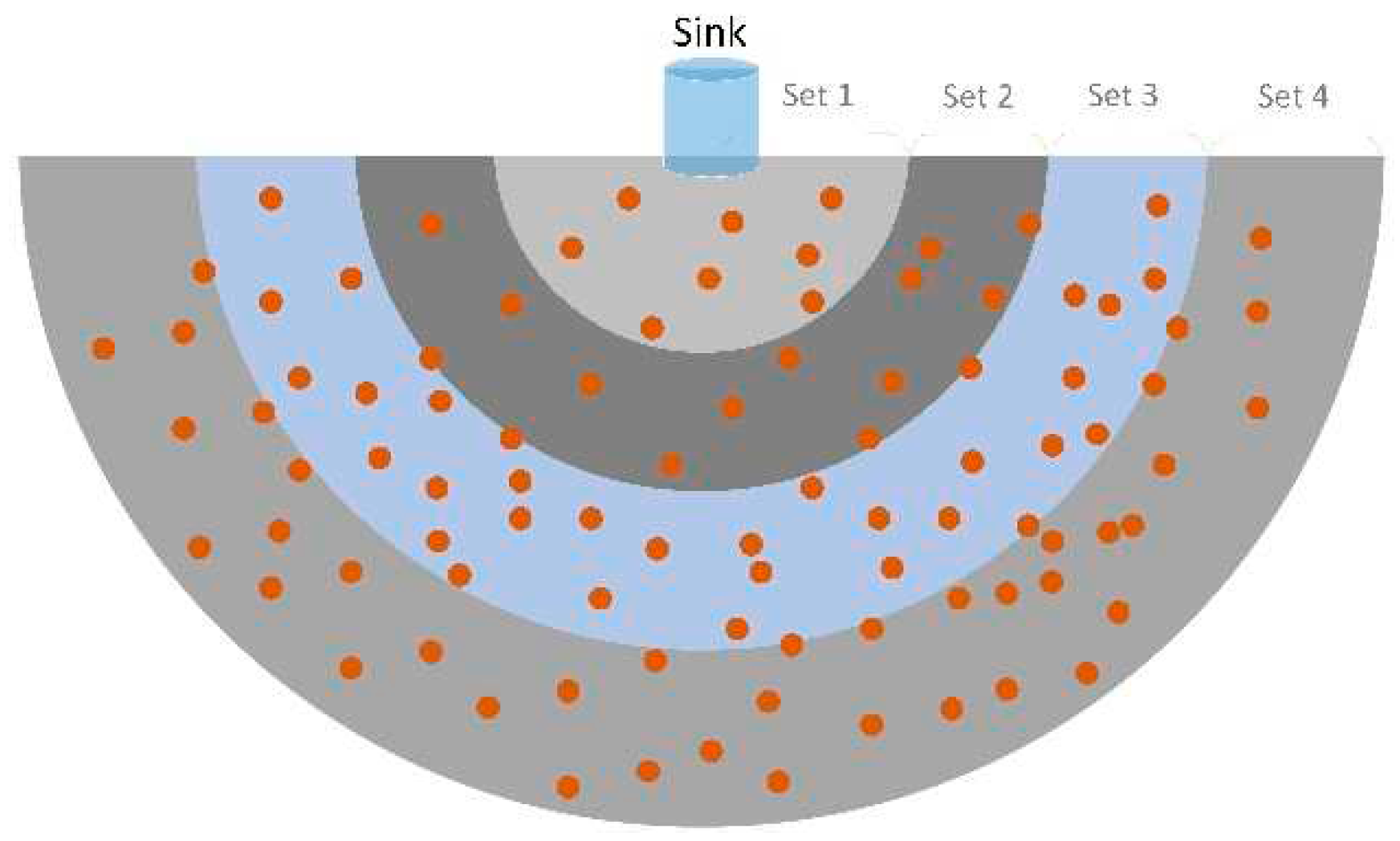
Figure 3.
Relation between each sector’s weight and parameters.
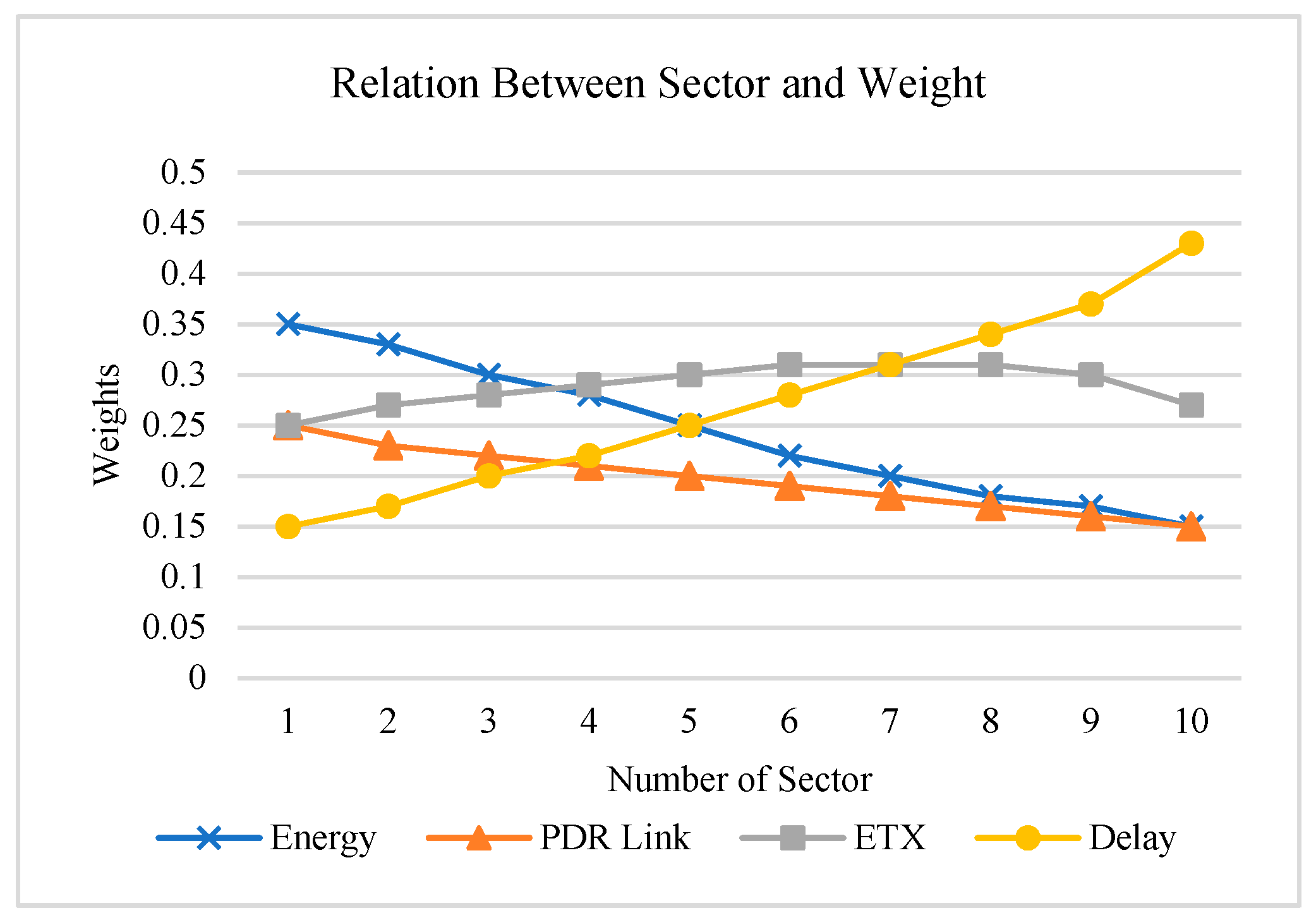
Figure 4.
Calculation of a multi-criteria decision system.
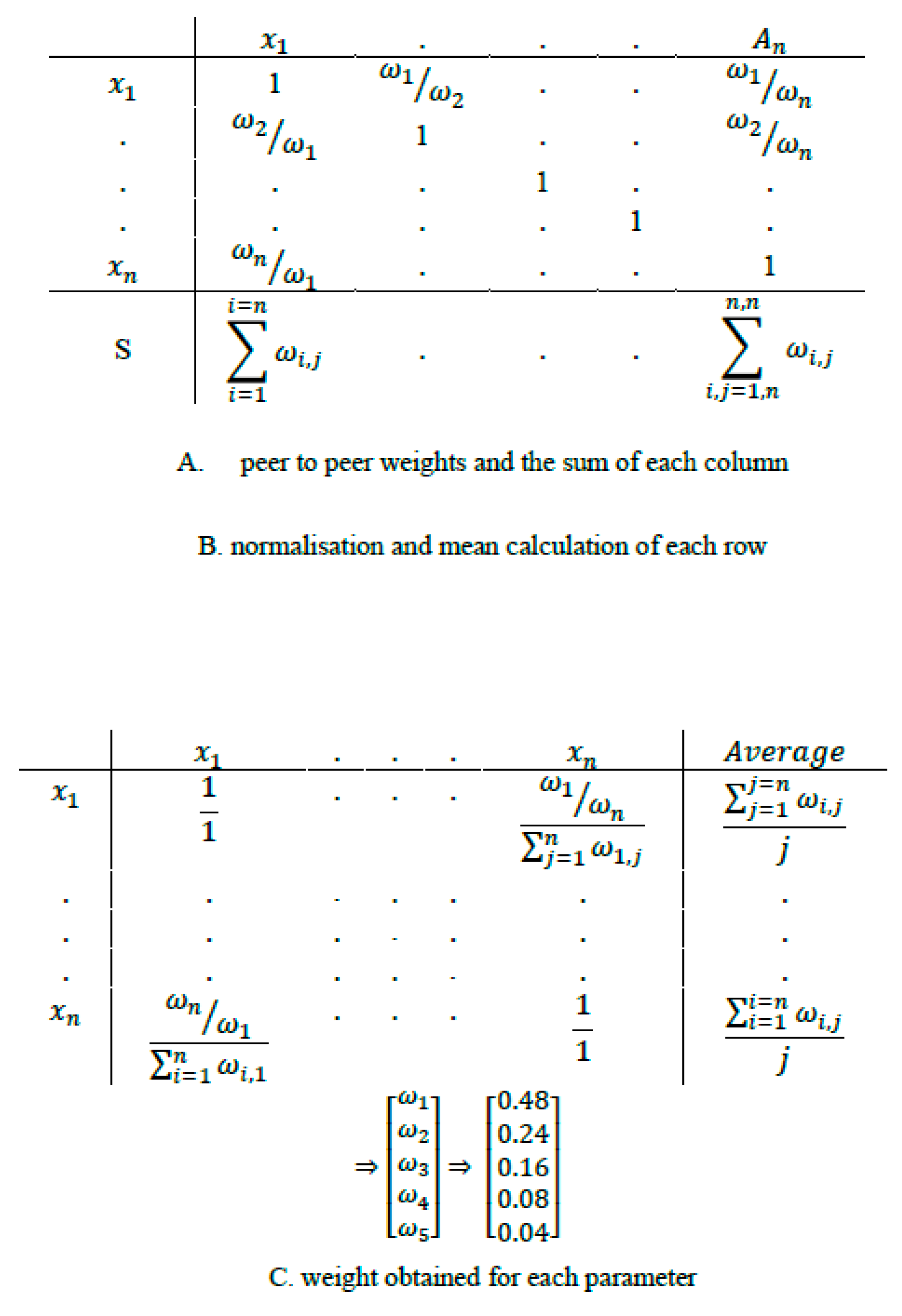
Figure 5.
Test results of the time of death for the first node and the middle node in the network with the node at rest.
Figure 5.
Test results of the time of death for the first node and the middle node in the network with the node at rest.
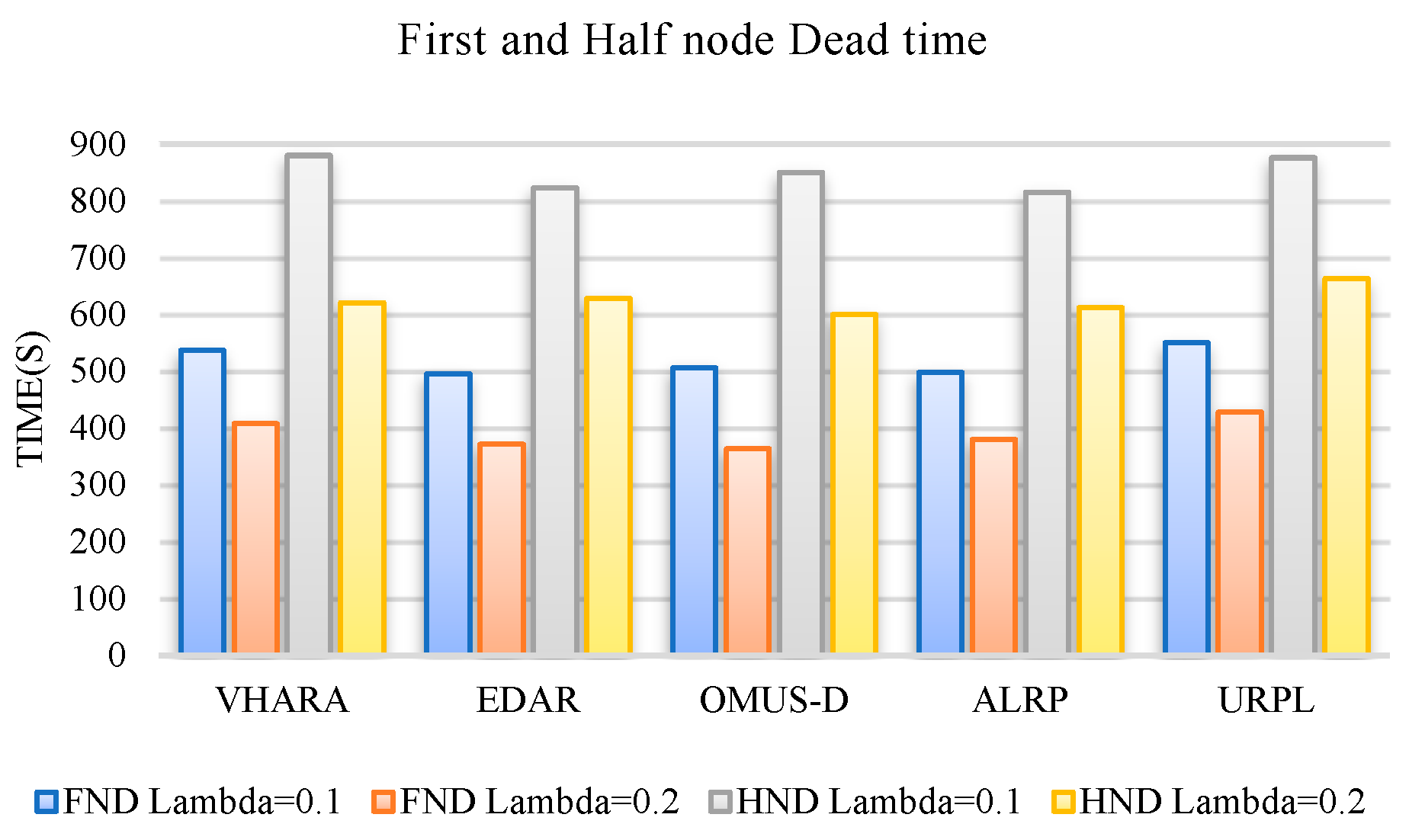
Figure 6.
Average network life.
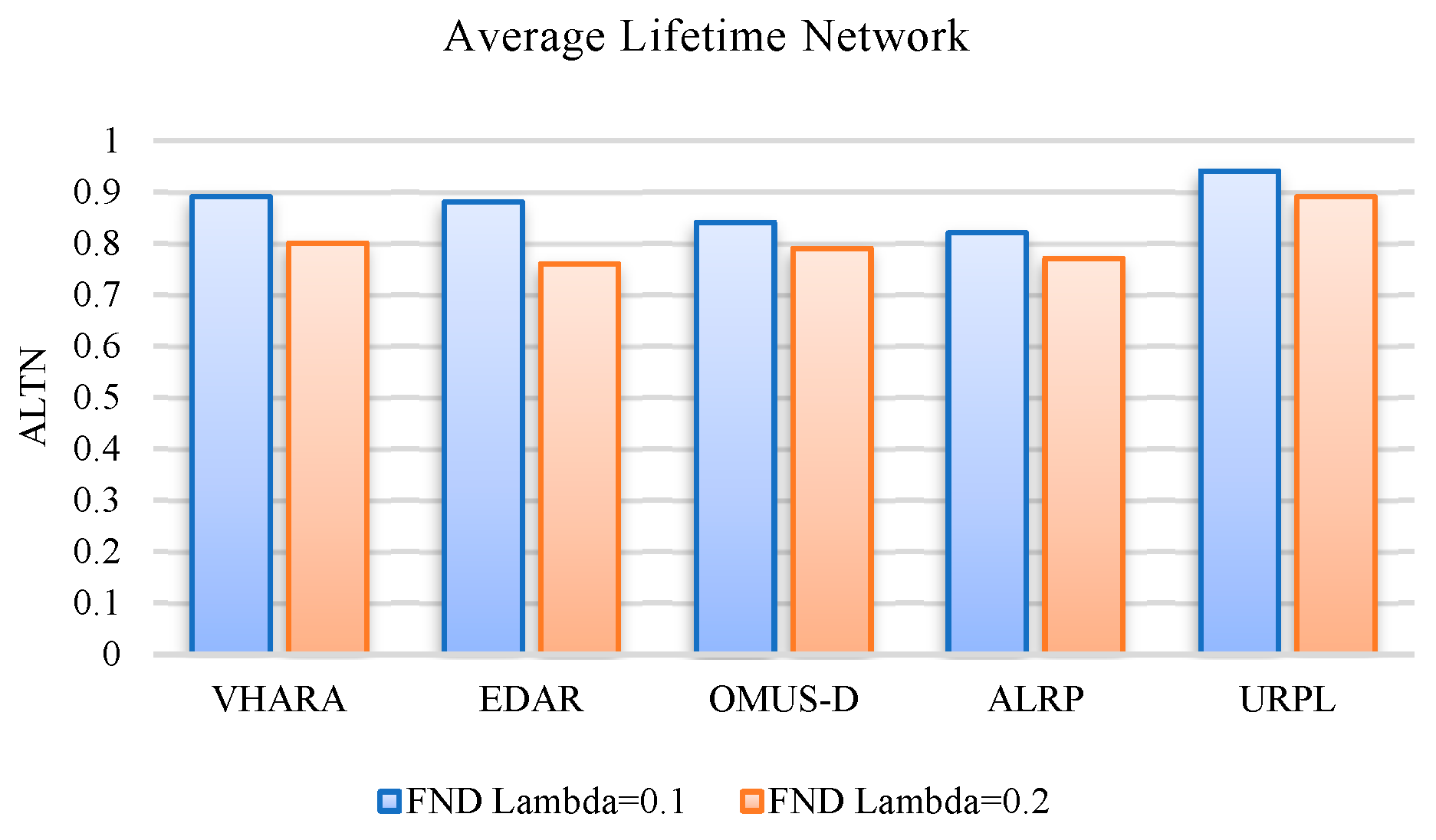
Figure 8.
Average end-to-end latency of network packets.
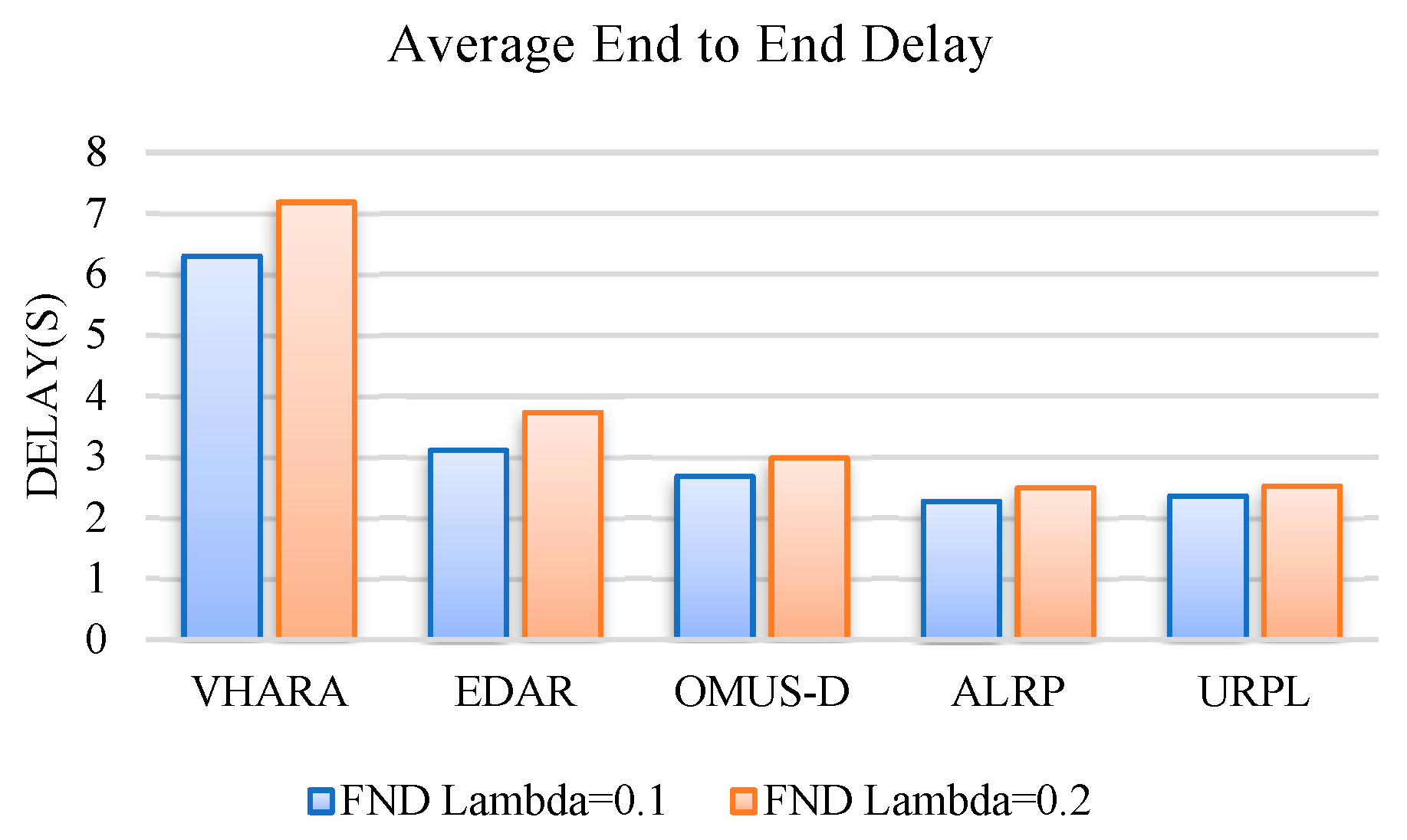
Figure 9.
The mean time of network topology convergence.
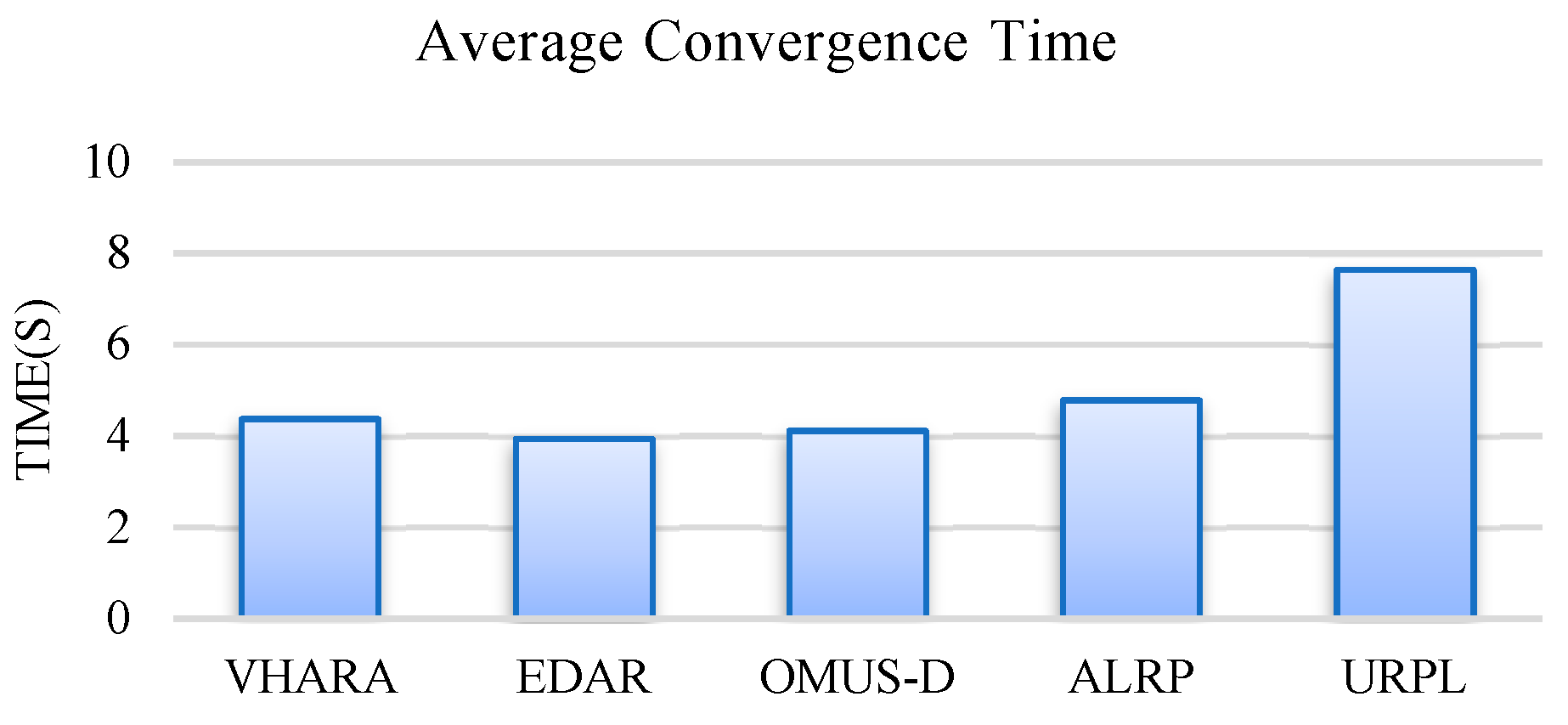

Table 1.
Architecture of uiot.
| Type | Description |
|---|---|
| 1D-UIoT | Sensors receive, process, and send information to the base station. |
| 2D-UIoT | Underwater sensor nodes (clusters) with cluster heads (anchor nodes) relay information to surface floating nodes. |
| 3D-UIoT | Extension of 2D-UIoT architecture, with clusters at different ocean depths. Nodes communicate within clusters, and cluster heads communicate with each other and the communication layer. |
| 4D-UIoT | Includes underwater vehicles (ROVs) and clusters at different ocean depths. ROVs collect information from cluster heads and relay it to floating objects. |
Table 2.
Recent energy efficient routing protocols and quality of service.
| Protocol | Algorithm | Method | Performance indicators | |||
|---|---|---|---|---|---|---|
| Energy Efficiency | Lifetime | QoS | Efficiency | |||
| [20] 2020 |
AEEDCO and AEEDCO-A to improve energy consumption in AUV | Optimising the performance of AUVs to maximise energy efficiency. | ✓ | High | Low | Justly |
| [21] 2021 |
AoI Optimisation in Heterogeneous IoT Network | Improved queuing model to enable information exchange between multiple AUVs | ✓ | Low | Low | Justly |
| [22] 2021 |
Improved Energy Efficiency Routing Protocol | Balancing traffic load between nodes with higher residual energy | ✓ | Low | Low | Low |
| [23] 2021 |
Guard-based flood pattern | Reducing energy consumption by solving the problem of holes due to the long distance of the route. | ⨯ | High | Low | Low |
| [24] 2022 |
Cluster approach based on energy-efficient routing protocol | Reducing energy consumption and the possibility of network development with multi-step communication. | ✓ | Low | Low | High |
| [25] 2022 |
Opportunistic location-based routing protocols | Increasing energy efficiency and reducing latency. | ✓ | Low | High | Low |
| [35] 2022 |
Step Selective Power Routing Protocol | Increase selection accuracy to reduce energy consumption and improve the delivery ratio. | ✓ | Low | Low | Justly |
| [27] 2022 |
Combining Bayesian multidimensional scaling localisation | Increasing the accuracy of hybrid communication in underwater Internet of Things. | ⨯ | High | Low | Justly |
| [28] 2022 |
k-means algorithm | Optimal cluster head selection based on the distance to the base station | ✓ | High | Low | Justly |
Table 3.
An example of a list of parents of each node with their quantitative values.
| Parents | ||||
|---|---|---|---|---|
| Parameters | ||||
| Sector | 3 | 3 | 3 | 3 |
| Remaining Energy(j) | 167.5 | 183.2 | 179 | 138.8 |
| ARSSI | ||||
| Delay Time(ms) | ||||
| ETX | ||||
| Link´s PDR (%) | 0.78 | 0.85 | 0.76 | 0.88 |
| Depth(m) | 129.8 | 141.2 | 155.4 | 117.4 |
Table 4.
Network simulation conditions.
| Parameters | Value (s) |
|---|---|
| Network topology | Random position |
| Deployment area | 1000 1000 500 m3 |
| Initial node energy | 50 J |
| Initial sink energy | 50 kJ |
| Number of nodes | 200 |
| Communication range | 150 m |
| Acoustic transmission range(sink) | 200 m |
| Channel | Underwater channel |
| Sink position | Surface (500 500 0) |
| Iterations | 10 |
| Packet size | 50 bytes |
| DIO/ DAO/ DAO-Ack / DIS pkt size | 4 bytes |
| Packet generation rate | pkt/s |
| Simulation time | 1000 s |
| Antenna | Omni-directional |
* Bellhop calculates the path loss between each node in each location.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



