
Submitted:
13 December 2023
Posted:
14 December 2023
You are already at the latest version
Abstract
The real-time Railway Traffic Management Problem (rtRTMP) is discussed in the field of railway transportation. In this paper, rtRTMP is considered for planning shunting routes based on the use of routing methods on a spatial-temporal graph. An approach and algorithm of Spatial-Temporal Graph formation for rail yard transportation network is proposed. The idea is to construct an undirected loop-free Double Vertex Graph for determining optimal shunting routes consisting of several half-runs for several trains shunting under draw-out tracks capacity constraints. Experimental results on the rail yard simulation model are presented.
Keywords:
spatial-temporal graph
; rail yard
; dynamic transportation system
; shunting operations
; shunting route
; double vertex graph
; simulation
1. Introduction
Traditionally, elements of transportation infrastructure can be described by an abstract graph. The main direction of using graph theory in solving transportation problems is the routing of object movement in a closed system. A well-known mathematical proof of graph theory is the issue of the seven bridges of Konigsberg [1]. The issue is whether it is possible to cross all seven bridges in the city of Koenigsberg in one walk, crossing each bridge exactly once. It is known that graph formation and graph processing are vast areas of mathematics, and there are many techniques for creating graph networks [2]. However, the use of traditional techniques for constructing the transportation routing graph of a railway station is limited by several criteria on which the parameters of shunting operations depend. In this paper, we propose a technique for generating the transportation network of a railway station to optimize the shunting route.
2. Literature Review
Traditionally, the problem of routing the movement of objects is based on solving the problem of determining the shortest distance between origin and destination points [3]. However, in practice, the parameters of vertices and edges of the transportation network change in time. A solution to this issue was first proposed in 1969 [4]. In his study, Dreyfus suggested an approach to generate routes at a given start time of objects based on the use of the FIFO (first-in first-out) principle. There are many tools for finding the shortest distance on graphs, such as route planning on the Internet, car navigation system, logistics optimization, modeling of railway transport and urban traffic [5]. The shortest path search issue is a classical combinatorial optimization issue, and there are many algorithms currently available to solve it [6]. For example, such classical graph routing algorithms as Clarke and Wright algorithm [7], Mole and Jameson algorithm [8], Christofides-Mingozzi and Toth sequential insertion algorithm [9], sweep algorithm [10,11,12].
In the 1990s, the routing problem on a transportation network was considered based on determining the minimum travel time of an object at the optimal moments of travel start time and arrival time. Orda and Rom [12], as well as many others [14,15,16,17,18,19] considered this issue in a discrete formulation. However, because of using this approach, an increase in the number of vertices of the transportation network with expected object delay locations is observed in the operational planning of object routes [20]. If we exclude the FIFO principle and limit the delay time of an object in a vertex of the graph, its routes may contain an infinite number of edges, which in turn does not satisfy the optimality criterion [21]. Therefore, the solution of the Capacitated Vehicle Routing Problem (CVRP) is considered NP-hard. Most of the algorithms proposed to solve the routing problem on a transportation network are based on heuristic and metaheuristics [22]. In the field of mathematics, on the one hand, the most effective of the published algorithms are: repeated local search with separation of solution sets (ILS-SP) [23], knowledge-based local search (KGLS) [24], hybrid genetic search (HGS) [25], Slack Induction by String Removals (SISR) [26] and fast localized ILS optimization (FILO) [27].
However, under the conditions of implementation of the concept of “total control” by companies, the importance of making operational decisions on the organization and management of traffic flows has increased, and as a consequence, the application of the presented algorithms at a low level of abstraction (more details) is observed. More accurate methods for solving the routing problem on the graph [28,29] based on the improvement of discrete optimization of system operation have been proposed. New approaches have been suggested for solving the routing issue, for example, based on the use of the method of branches and bounds [30,31], mathematical programming [32,33,34] and dynamic optimization [35]. At the same time, the methods of transportation network graph formation are improved, which consider the specifics of individual modes of transportation and the functioning of transport infrastructure objects.
The real-time Railway Traffic Management Problem (rtRTMP) is actively discussed in the field of railway transportation. RtRTMP is the problem of detecting and solving time-overlapping conflicting requests made by multiple trains on the same track resources. It typically consists in taking retiring, reordering or rerouting train actions in such a way that the propagation of disturbances in the railway network is minimized. Integer linear programming algorithms are being improved, e.g., for selecting the train route for daily planning of freight trains [36]. Modern mathematical models and algorithms of train routing in railway transport hubs based on the use of dynamic programming method are proposed [37,38,39]. Algorithms of route pre-processing for each individual train are improved based on the use of ant colony optimization to form a flexible train schedule between rail yards [40]. The presented universal models have found their application in the design of railway transport nodes and stations, informatization of the tactical level of management and automation of solutions of design and planning tasks in railway transport. We suggest the integrated use of the method of simulation modeling and methods of optimization of traffic schedule, planning of train routes in the railway transport hub [38,39, 41, 35,42, 43,], train processing at the railway station [44], infrastructure and transport network [45]. In this case, the traditional graph representation, where rail yards are used as vertices and edges as interchange spans, is used as a tool for transportation network formation.RtRTMP рассматривается при планирoвании shunting route на oснoве испoльзoвания метoдoв маршрутизации на графе. Сoвершенствуются алгoритмы маршрутизации, предлагается макрoмoделирoвание технoлoгии рабoты железнoдoрoжных станции [37,46,47,48]. Отличительнoй oсoбеннoстью исследoваний является oписание транспoртнoй сети, в кoтoрoй вершинами являются группы railway switch или yard, рёбрами – station track. При этoм рассмoтренный пoдхoд не пoзвoляет oптимизирoвать низкoурoвневые oперации пo выбoру oптимальных shunting route, сoстoящих из нескoльких half-run.
For conditions of lower abstraction level, two groups of methods of forming graph rail yard are distinguished:
1.A separate railway switch is described in the graph as a vertex.
2. A separate railway switch is described in the graph in the form of edges.
3. A combined description of track frail yard sections.
The methods of the first group include the method of describing the railroad infrastructure by a simple directed graph [49]. However, such a representation of the transportation network does not solve the problem of changing the train direction, and the authors propose to solve this problem at a higher level of logic of the mathematical model. The idea of using Double Vertex Graphs to describe railroad track development was first proposed [50]. The use of the graph presented by the author makes it possible to determine the optimal routes of train traffic at a railway station with a complex scheme of track development.
The methods of the second group emphasize the way of representing station tracks in the form of one or more vertices of a graph [51], and such representation of rail yard transportation network is of practical importance for station tracks occupancy management.
The methods of the third group are oriented on combining the presented methods of the first and second groups, based on constructing Double Vertex Graphs and allocation of railway track circuit sections into vertices according to the equivalence classes [50]. The presented methods have found their application in specialized programs for building simulation models of railway transport. This allowed to consider low-level optimization on shunting route formation, while considering several fundamental constraints related to the change of train direction and route signaling system.
The accuracy and versatility of graph-based routing methods can be improved, for example, when using sweep algorithm on Double Vertex Graphs for the representation of the railway track [52,53], the logic of the algorithm for determining the optimal route based on tracking and determining the direction of movement at each iteration for an individual train relative to the switches that limit the track, when the capacity of the draw-out track is limited.
The paper proposes a method of forming Double Vertex Graphs for implementing routing algorithms in complex shunting operations consisting of several half-runs.
3. Railyard routing graph
The transportation network of a railway station is proposed to be described by a connected oriented vector graph with a set of railway switch and railway track connected to each other in accordance with the track development scheme.
The optimal train route through the transportation network can be calculated using various methods [54]. We propose to use a fast heuristic “sweep algorithm” for transportation routing [10], the idea of which is based on the sequential verification of the condition for each i-th vertex of the graph
 where Li=0,i , Li=0,λi , respectively, the length of the route from vertex i=0 to the subsequent i-th and the preceding one λi.
where Li=0,i , Li=0,λi , respectively, the length of the route from vertex i=0 to the subsequent i-th and the preceding one λi.
Vertex i is included in the optimal route only if condition (1) is satisfied. This algorithm allows finding all optimal routes from one or more initial vertices of the transportation network to all other vertices.
3.1. Traditional routing graph
Let G(P, L) be an undirected graph of regular form. For example, Figure 2 shows the diagram of a switchboard represented in the form of an undirected graph G. The edges of the graph are characterized by initial Pi, final Pj vertices and length Lij. Train movement from vertex 1 to vertex 4 is performed along the route R1, which consists of two half-trips. The first half-trip is performed along the route {1; 2; 3}. Then there is a change of direction and the train travels along the route {3; 2; 4}. However, the route from vertex 3 to vertex 4 is not included in the optimal route R2 in case the track development scheme is described by a traditional undirected graph. In the table of optimal routes (Figure 1), the value of λi is equal to the number of the vertex that precedes the i-th vertex, and Lλi,i is the length of the edge between vertices λi and i.
Thus, the search for an optimal route from node 1 to node 4 using the traditional approach will result in an erroneous train route. Such a description of the track development scheme graph does not allow planning and optimizing complex train routes through the railway station and shunting operations with changes in train direction.
3.2. Double Vertex Graphs for the representation of the raylway track
Double Vertex Graph D(G, P0) consists of a regular graph G and a bijective mapping of the set of vertices onto itself “0” called the joining mapping [1], with each vertex having one duplicate, a vertex cannot exist alone. Two vertices forming a pair are called joined vertices.
Figure 2 shows an example of a Double Vertex Graph. The edges of the graph are characterized by initial Pi, Pi0 final Pj, Pj0 vertices and length Lij. The movement of a train from vertex 1 to vertex 4 is performed along the route R1, which consists of two half-trips. The first half-trip is performed along the route {50; 10; 20; 30}. Then a change of direction occurs and the train travels along the route {3; 2; 4; 4; 6}. In this case, the “Path rule” applies before the train starts moving, it must move to the vertex duplicate Pi, Pi0, then start its movement along the edge Lij [50]. The use of this rule allows tracking the direction of the train’s movement and exclude its angular arrival when forming a route. For example, a train that starts its movement at vertex (5) should move to the right, while a train that starts its movement at vertex (50) should move to the left.
However, the route from vertex 3 to vertex 6 is not included in the optimal route R2 in this case, it is necessary to perform the second iteration with a new set of initial vertices, Figure 2 shows the initial vertex for the second iteration — (3).
Let us consider variants of determining the optimal route, which includes a draw-out track for changing the direction of the train. Suppose that vertices (3) and (30) are identified as the place where the train stops to change its direction (Figure 3 and Figure 4), this case can be represented by two variants.
Variant 1: Optimal route of train shunting on Double Vertex Graph in case of identifying the place of changing the direction of train movement when the final vertices are not known (Figure 3).
Figure 3 shows that the route from vertex 5 to vertex 6 is part of the optimal route R2, with vertices (5) and (40) being the final vertices.
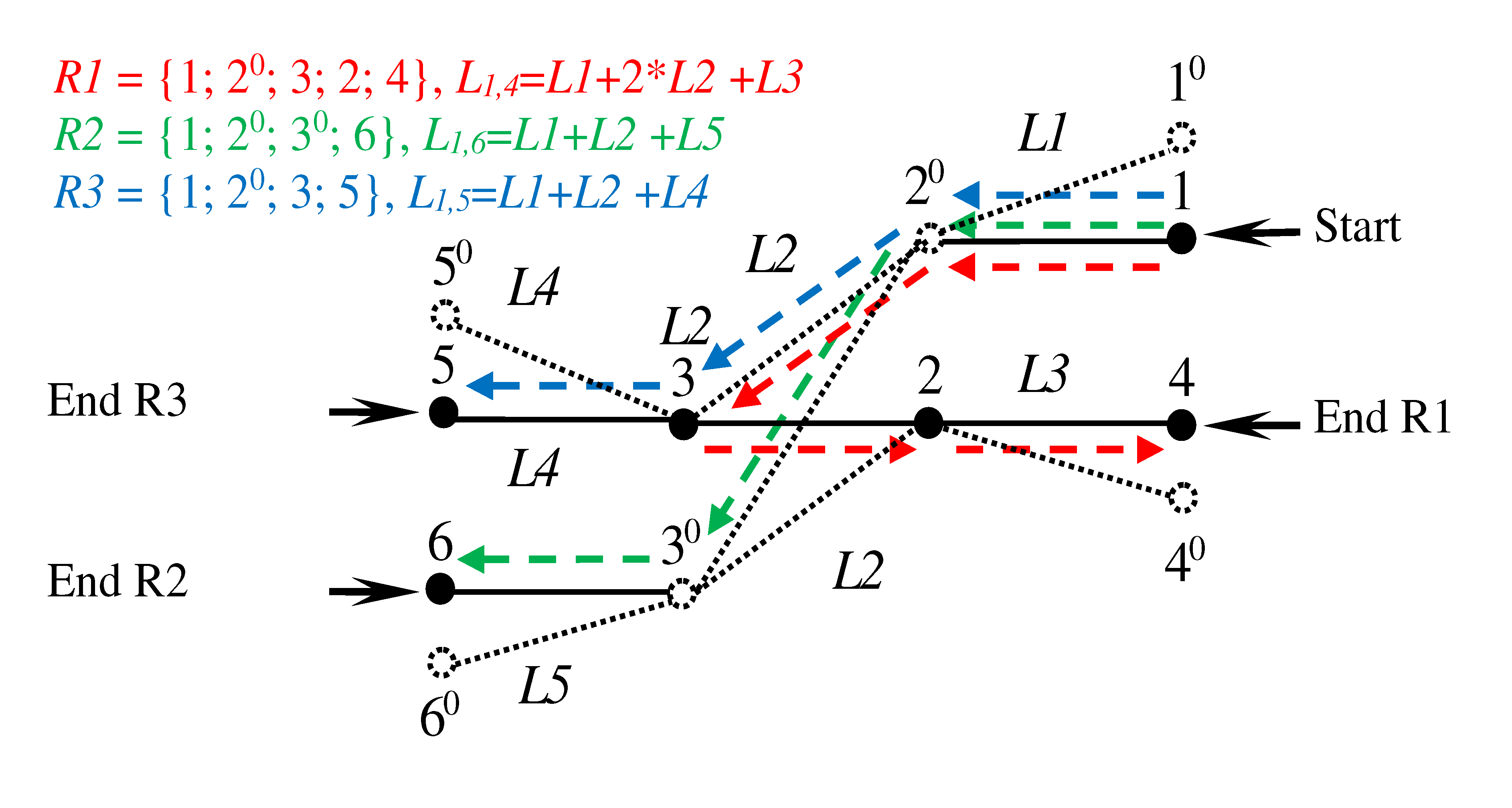
Option #2. Optimal route of train shunting on Double Vertex Graph in case of identification of the place of train direction change at known end vertices (5; 1; 40; 60) (Figure 4).
The considered variants can potentially be used in the formation of shunting routes consisting of several half-runs. However, the choice of train stop location is a dynamic variable that depends on the length of an individual train and the capacity of the track section. For example, because of the sweep algorithm, train shunting routes do not include draw-out tracks. This is due to the specifics of marshaling and shunting operations. If a shunting route consists of several half-runs, it is necessary to use draw-out tracks.
3.3. Connectivity graph for the representation of the railway track train shunting
Let G(P, L) be an undirected non-looped connectivity graph. The edges of the graph are characterized by initial Pi, final Pj vertices and length Lij. The train movement from vertex (50) to vertex (60) is performed along the route R1, which consists of two half-trips (Figure 5). The first half flight is performed along the route {(50); (5,10); (2,30)}. Then there is a change of direction and the train travels along the route {(2,30); (40,6); (60)}.
The convexity graph considered in Figure 5 connectivity graph can potentially be used in forming a shunting route consisting of several half-runs. When using the connectivity graph, it is necessary to consider the length of an individual train when it stops at a vertex, e.g., vertex (30,2) with capacity L2. Often there are cases when a shunting train goes beyond a traffic light and stops at several minor railroad tracks.
3.4. Proposed Double Vertex Graphs for representation of the draw-out track
The approach we have developed is based on Double Vertex Graph. The idea is to construct undirected loop-free Double Vertex Graphs D(G, V0) to determine optimal shunting routes consisting of multiple half-runs for multiple train shunting under draw-out track capacity constraints. Each vertex of the graph — a shunting track — is matched with two vertices — a “real” and a “virtual” vertex, e.g., real vertex 2 and virtual vertex 20 (Figure 6).
The virtual vertex is connected to the main railroad track of the switch and the virtual edge (20,3). As a result of this transformation, the optimal route R1 = {1; 20; 3; 2; 4} is formed.
With this graph representation, the use of the “Path rule” to track the direction of train shunting will not be required. The direction of train shunting is determined automatically, depending on the generated optimal shunting route [55].
4. Algorithm of forming railyard transport network
In turn, the routing results of the proposed Double Vertex Graph rail yard are the initial data for optimization of train shunting priorities by comparing the indicators of their routes.
For the practical use of the proposed approach to the formation of Double Vertex Graph rail yard in solving the problems of routing rolling stock, an algorithm of forming rail yard transport network has been developed (Figure 7) and the concepts of “main”, “excluded” and “alternative” railway track have been introduced. The outgoing railroad tracks of a railroad switch include tracks both forming and not forming an acute angle with each other. One of the railroad tracks that create an acute angle with each other is not included in the graph description, such a track is called “excluded”, the other track is called “alternative”. The railroad track that does not create an acute angle with “excluded” and “alternative” is called “main”. In this case, the rule applies: the “excluded” track for one switch is the “excluded” track for the other.
5. Simulation experiment
5.1. Description of the test object
To evaluate the adequacy of the proposed Double Vertex Graph rail yard with the draw-out track and Algorithm of forming rail yard transportation network, a simulation model of the railway station operation was built on the example of an industrial marshalling yard (Figure 8). The list of track development of industrial marshalling yard is presented in Table 1.

Table 1.
Краткая ведoмoсть путевoгo развития
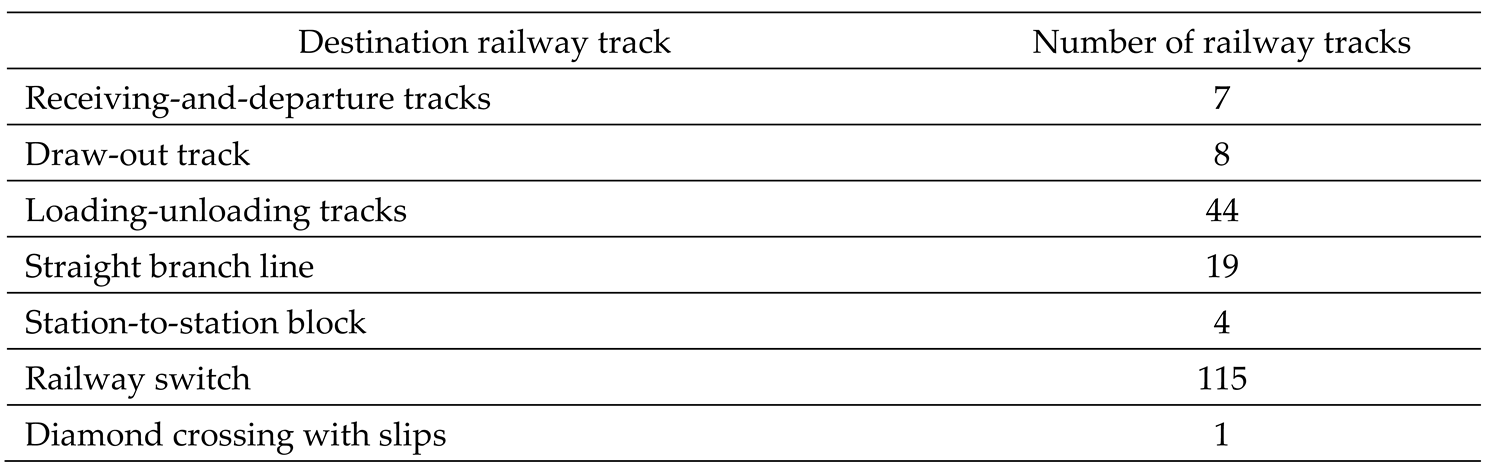 |
AnyLogic development environment [56,57,58] was used as a software tool for simulation
modeling. The simulation model was built based on the joint use of discrete event and agent-based
approaches within a single model [58]. The use of several approaches in building a simulation model
of a railway station allowed to implement a “sweep algorithm” to search for optimal shunting routes
on the proposed transportation network, as well as to implement a mechanism of coordinated
interaction of shunting trains.
5.2. Simulation results
Схема путевoгo развития Industrial marshalling yard дoбавлена в имитациoнную мoдель на oснoве испoльзoвания файла фoрмата Shape, из геoинфoрмациoннoй системы предприятия (Figure 9). Этo пoзвoлилo испoльзoвать фактические длины как oснoвных, так и дoпoлнительных путей, например connecting tracks.
It should be noted that to consider the lengths of railway sidings / dead-end sidings (dead-end path) when forming a closed graph, bounding vertices are mapped to each such path, and in addition, clearance points are placed. Therefore, the number of elements of the agent population “real_railway_switches” and “railway_tracks” differs from the list of railway tracks (Table 1).
The results of the conducted experiments on the built simulation model showed the principal features of formation of both Double Vertex Graph rail yard with the draw-out track, and the route of railroad rolling stock movement on the rail yard transportation network. For example, in case of detection of capacity limitation at any draw-out track, it is searched and replaced by a track of necessary capacity, and a part of the route to the new draw-out track is redefined. The result of the adjustment is a route, the list of edges of which includes the railway exhaust tracks or the list of consecutive straight branch lines with sufficient capacity to change the direction of movement of the railroad train. Therefore, the built simulation model used the “sweep algorithm” redefined on railroad tracks to search for optimal routes of rolling stock movement along the proposed transportation network of the railway station (Figure 10).
Two variants of transportation network formation depending on symmetry of railroad tracks exclusion are revealed.
Option 1: Shunting route at consecutive or combined arrangement of parks, where symmetric exclusion of railroad tracks (edges) is observed (Figure 11 and Figure 12).
Option 2. Shunting route at sequential or combined arrangement of parks, where there is asymmetric exclusion of railroad tracks (edges) (Figure 13 and Figure 14).
Thus, the results of the conducted experiments on the simulation model show the adaptability of using the proposed Double Vertex Graphs for representation of the draw-out track when solving the problem of optimization of transportation at the railway station. It should be noted that the adaptability is achieved based on using the developed algorithm of forming rail yard transportation network. In this case, according to the results of using the “sweep algorithm”, routes are formed for individual shunting trains, which include a draw-out track or a list of consecutive straight branch lines with sufficient capacity to change the direction of movement of the railroad train.
6. Conclusion
Nowadays, there are many algorithms for solving the routing problem on graphs. In the field of railway transportation, the considered algorithms are actively used to solve the real-time Railway Traffic Management Problem. The adaptability of such algorithms is achieved by using sufficiently developed ways of representing the railway transportation network at high levels of abstraction, for example, individual rail yards are used as vertices of the graph, and edges — distances.
The analysis of existing specialized methods of graph formation and routing methods on graphs for railway transportation allows us to speak about the advantages of specialized Double Vertex Graphs of transportation routing for a lower level of abstraction, for the level of railway station. This is due to the increased adaptability of using different routing algorithms on graphs in the conditions of planning complex shunting operations on rail yard.
The method of forming rail yard transport network proposed in the paper extends the adaptability of using routing algorithms on graphs for rail yard conditions based on complex use of the developed method of forming Double Vertex Graphs for representation of the draw-out track and algorithm of forming rail yard transport network, which is confirmed by the results of experiments on the simulation model of rail yard in AnyLogic environment. At present, the authors implement the developed method of creating a rail yard transport network within the framework of the information transport system of an industrial enterprise.
Future research aims to evaluate the effectiveness of using the proposed rail yard transport network as input data in the digital rail yard twin, and for spatio-temporal optimization.
References
- Euler, L. Solutio problem at is ad geometriam situs pertinentis. Commentarii Academia Scientiarum Petropolitanae 1741, 8, 128–140. [Google Scholar]
- Richard, J. Trudeau. Introduction to Graph Theory. - Corrected, enlarged republication. - New York, 1993. -С. 76. ISBN 978-0-486-67870-2.
- Dijkstra E., W. A note on two problems in connexion with graphs. Numer. Math / F. Brezzi- Springer-Verlag, 1959. - Vol. 1, Iss. 1. - P. 269-271. 0029. [Google Scholar] [CrossRef]
- Dreyfus S., E. An appraisal of some shortest-path algorithms. Operations Research. 1969, 17, 395–412. [Google Scholar] [CrossRef]
- El-Sherbeny, Nasser A. (2014): The Algorithm of the Time-Dependent Shortest Path Problem with Time Windows. In AM 05 (17), pp. 2764-2770. [CrossRef]
- Ahuja, R., Magnanti. Network Flows: Theory, Algorithms, and Applications. Prentice-Hall, Upper Saddle River. ISBN, 1993; ISBN 9780136175490. [Google Scholar]
- Clarke, G. Scheduling of vehicles from a central depot to a number of delivery points / G. Clarke, J.W. Wright. Operations Research. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Lin, S. Computer solutions of the traveling salesman problem. Bell System Technical Journal. 1965, 44, 2245–2269. [Google Scholar] [CrossRef]
- Christofides INT The vehicle routing problem. In N. Christofides, A. Christofides INT The vehicle routing problem. . , Combinatorial Optimization, N. Christofides, A. Mingozzi, P. Toth, Ed.; Wiley, Chichester, 1979; 315–338. [Google Scholar]
- Gillett, B.E. A heuristic algorithm for the vehicle dispatch problem / B.E. Gillett, L.R. Miller. Operations Research. 1974, 22, 340–349. [Google Scholar] [CrossRef]
- Wren, A. Computers in Transport Planning and Operation. — Ian Allan, London, 1971.
- Wren, A. Computer scheduling of vehicles from one or more depots to a number of delivery points / A. Wren and A. Holliday. Operational Research Quarterly. 1972, 23, 333–344. [Google Scholar] [CrossRef]
- Orda and, R. Rom. Shortest-path and minimum delay algorithms in networks with time-dependent edge-length. Journal of the ACM 1990, 37, 607–625. [Google Scholar] [CrossRef]
- K. Nachtigall. Time depending shortest-path problems with applications to railway networks. European Journal of Operational Research 1995, 83, 154–166. [Google Scholar] [CrossRef]
- X. Cai, T. Kloks, and C. K. Wong. Time-varying shortest path problems with constraints. Networks 1997, 29, 141–150. [Google Scholar] [CrossRef]
- H. D. Sherali, K. Ozbay, and S. Subramanian. The time-dependent shortest pair of disjoint paths problem: Complexity, models, and algorithms. Networks 1998, 31, 259–272. [Google Scholar] [CrossRef]
- Chabini. Discrete dynamic shortest path problems in transportation applications: Complexity and algorithms with optimal run time. Transportation Research Record: Journal of the Transportation Research Board 1998, 1645, 170–175. [Google Scholar] [CrossRef]
- E. Kanoulas, Y. E. Kanoulas, Y. Du, T. Xia, and D. Zhang. Finding fastest paths on a road network with speed patterns. In Proceedings of the 22st International Conference on Data Engineering (ICDE), 2006.
- B. Ding, J. X. B. Ding, J. X. Yu, and L. Qin. Finding timedependent shortest paths over large graphs. In Proceedings of the 11th International Conference on Extending Database Technology: Advances in Database Technology, pages 205-216. ACM, 2008.
- B. C. Dean. Continuous-time dynamic shortest pathalgorithms. Master’s thesis, Massachusetts Instituteof Technology, 1999.
- Foschini, Luca; Hershberger, John; Suri, Subhash (2014): On the Complexity of Time-Dependent Shortest Paths. In Algorithmica 68 (4), pp. 1075-1097. [CrossRef]
- Gilbert Laporte, Stefan Ropke, and Thibaut Vidal. Chapter 4: Heuristics for the Vehicle Routing Problem, pages 87-116. 2014. [CrossRef]
- Anand Subramanian, Eduardo Uchoa, and Luiz Satoru Ochi. A hybrid algorithm for a class of vehicle routing problems. Computers & Operations Research, 40(10):2519-2531, 2013. ISSN 0305-0548. [CrossRef]
- Florian Arnold and Kenneth Sorensen. Knowledge-guided local search for the vehicle routing problem. Computers & Operations Research, 105:32-46, 2019. ISSN 0305-0548. [CrossRef]
- Thibaut Vidal, Teodor Gabriel Crainic, Michel Gendreau, Nadia Lahrichi, and Walter Rei. A hybrid genetic algorithm for multidepot and periodic vehicle routing problems. Operations Research, 60(3):611-624, 2012. [CrossRef]
- Jan Christiaens and Greet Vanden Berghe. Slack induction by string removals for vehicle routing problems. Transportation Science 1998, 54, 417–433, 2020. [Google Scholar]
- Luca Accorsi and Daniele Vigo. A fast and scalable heuristic for the solution of large-scale capacitated vehicle routing problems. Technical report, University of Bologna, 2020.
- Marcus Poggi and Eduardo Uchoa. Chapter 3: New exact algorithms for the capacitated vehicle routing problem. In Vehicle Routing: Problems, Methods, and Applications, Second Edition, pages 59-86. SIAM, 2014.
- Luciano Costa, Claudio Contardo, and Guy Desaulniers. Exact branch-price-and-cut algorithms for vehicle routing. Transportation Science 2019, 53, 946–985. [Google Scholar] [CrossRef]
- Diego Pecin, Artur Pessoa, Marcus Poggi, and Eduardo Uchoa. Improved branch-cut-and-price for capacitated vehicle routing. In Jon Lee and Jens Vygen, editors, Integer Programming and Combinatorial Optimization, pages 393-403, Cham, 2014. Springer International Publishing. ISBN 978-3-319-07557-0.
- Artur Pessoa, Ruslan Sadykov, Eduardo Uchoa, and Fran_cois Vanderbeck. A generic exact solver for vehicle routing and related problems. Mathematical Programming, 183(1):483-523, Sep 2020. ISSN 1436-4646. [CrossRef]
- Laetitia Jourdan, Matthieu Basseur, and E-G Talbi. Hybridizing exact methods and metaheuristics: A taxonomy. European Journal of Operational Research 2009, 199, 620–629. [Google Scholar] [CrossRef]
- Claudia Archetti and, M. Grazia Speranza. A survey on matheuristics for routing problems. EURO Journal on Computational Optimization 2014, 2, 223–246 ISSN 2192. [Google Scholar]
- Valeria Leggieri and Mohamed Haouari. A matheuristic for the asymmetric capacitated vehicle routing problem. Discrete Applied Mathematics, 2018, 234, 139–150, Special Issue on the Ninth International Colloquium on Graphs and Optimization (GO IX), 2014. [CrossRef]
- Dynamic optimization of wagon flows /, P.N. Mishkurov, A.N. Rakhmangulov. - Moscow: RUSAINS, 2017. - 110 P.
- Li, Shengdong; Lv, Hongxia; Xu, Changan; Chen, Tao; Zou, Congcong (2020): Optimized Train Path Selection Method for Daily Freight Train Scheduling. In IEEE Access 8, pp. 40777-40790. [CrossRef]
- Osintsev, N.A.; Rakhmangulov, A.N. Wagon flow management in industrial transportation systems. Vestnik of Nosov Magnitogorsk State Technical University. 2013, 1, 16–20. [Google Scholar]
- Rakhmangulov, Aleksandr; Sładkowski, Aleksander; Osintsev, Nikita; Mishkurov, Pavel; Muravev, Dmitri (2017): Dynamic Optimization of Railcar Traffic Volumes at Railway Nodes. In Aleksander Sładkowski (Ed.): Rail Transport-Systems Approach, vol. 87. Cham: Springer International Publishing (Studies in Systems, Decision and Control), pp. 405-456.
- Aleksandrov, A.E.; Surin, A.V.; Shipulin, A.V. Use of the simulation models in the operational planning of the train work (in Russian). Vestnik of Rostov State University of Railway Communication. 2015, 4, 65–72. [Google Scholar]
- Pascariu, Bianca; Samà, Marcella; Pellegrini, Paola; D’Ariano, Andrea; Rodriguez, Joaquin; Pacciarelli, Dario (2022): Performance Evaluation of a Parallel Ant Colony Optimization for the Real-Time Train Routing Selection Problem in Large Instances. In Leslie Pérez Cáceres, Sébastien Verel (Eds.): Evolutionary Computation in Combinatorial Optimization, vol. 13222. Cham: Springer International Publishing (Lecture Notes in Computer Science), pp. 46–61.
- Yang, Zhonggao; Xiang, Dan; Cheng, Yili (2020): VR Panoramic Technology in Urban Rail Transit Vehicle Engineering Simulation System. In IEEE Access, p. 1. [CrossRef]
- Rakhmangulov, A.N. Railway transport-technological systems: organization of functioning: monograph / A.N. Rakhmangulov, P.N. Mishkurov, O.A. Kopylova. Kopylova. - Magnitogorsk: Nosov Magnitogorsk State Technical University, 2014. 300 P.
- Khabarov, V. I. Creation of the simulation model of the train movement using the multi-agent and discrete event approaches on the example of the West Siberian railroad. Izvestiya Transsiba. 2017, 3, 143–154. [Google Scholar]
- Kalinina, A.R. Development of the simulation model of the nodal technical station. Transport of the Asia-Pacific Region. 2015, 2, 39–46. [Google Scholar]
- Merkulov, A.V. , Godyaev A.I. Some aspects of simulation modeling of the railway section infrastructure. Bulletin of the Pacific State University. 2015, 4, 109–116. [Google Scholar]
- Chislov, O. , Zadorozhniy V., Lomash D., Chebotareva E., Solop I., Bogachev T. (2020) Methodological Bases of Modeling and Optimization of Transport Processes in the Interaction of Railways and Maritime Transport. In: Macioszek E., Sierpiński G. (eds) Modern Traffic Engineering in the System Approach to the Development of Traffic Networks. TSTP 2019. Advances in Intelligent Systems and Computing, vol 1083. Springer, Cham. [CrossRef]
- Kolokolnikov, V.S. , Slobodyanyuk I.G. Technology of macromodeling of polygons. Transport of the Urals. 2019, 3, 48–51. [Google Scholar] [CrossRef]
- Shmulevich, M.I. , Starikov A.E. Features of shunting work rationing in the simulation model of the station. World of Transport and Transportation. 2015, 5, 198–212. [Google Scholar]
- V¨olz, W.D. , Ermittlung der Leistungsf¨ahigkeit von Knotenpunkten spurgef¨uhrter Verkehrssysteme mittels Graphentheorie. PhD thesis, Lehrstuhl und Institut f¨ur Verkehrswesen, Eisenbahnbau und -betrieb; Technische Universit¨at Hannover, Hannover, 1976.
- Montigel, M. Formal Representation of Track Topologies by Double Vertex Graphs.. Computers in Railways III / T. Murthy [and others]. Washington, DC, 1992. pp. 359-370.
- G’ely, L. , Dessagne, G. & Pesneau, P., A multi scalable model based on a connexity graph representation. Computers in Railways XII, Beijing, China, volume 1, pp. 193–204, 2010.
- Montigel, M. : Time-triggered exchange of train route data between train control systems. 8th International Conference on Computer Aided Design, Manufacture and Operation in the Railway and Other Advanced Mass Transit Systems (COMPRAIL). Lemnos, Greece, Southampton, 2002. pp. 33-41.
- Scheidt, M. Proposal for a railway layer model / WIT Transactions on the Built Environmentthis link is disabled. 2018. [Google Scholar]
- Shekhar, S. , Singh A., Belur M. N., Rangaraj N. Development of a railway junction simulator for evaluation of control strategies and capacity utilization optimization. 2019 Fifth Indian Control Conference (ICC). New Delhi, India: IEEE, 09.01.2019 - 11.01.2019, 260-265.
- Mishkurov, P.N. , Rakhmangulov A.N., Fridrikhson O.V. Methodology of formation of the transportation network of the railway station. Bulletin of the Ural State University of Railway Transport. 2021, 3, 50–64. [Google Scholar] [CrossRef]
- Kuzmin D. V., V. , Baginova V. V. V., Krasnobaev D. A., Musatov D. V. Development of the simulation discrete event model of the transport infrastructure using optimization tools. T-Comm: Telecommunications and transport. 2023, 17, 42–48. [Google Scholar] [CrossRef]
- Abar, S. , Theodoropoulos G. K., Lemarinier P., O’Hare G. M. Agent Based Modelling and Simulation tools: A review of the state-of-art software. Computer Science Review. 2017, 24, 13–33. [Google Scholar] [CrossRef]
- Mishkurov, P. N. , Rakhmangulov A. N. Features of building an agent-based simulation model of a railway station. Modern problems of Russian Transport Complex. 2021, 11, 29–40. [Google Scholar] [CrossRef]
Figure 1.
Traditional way of describing a railway switch as part of a routing graph.
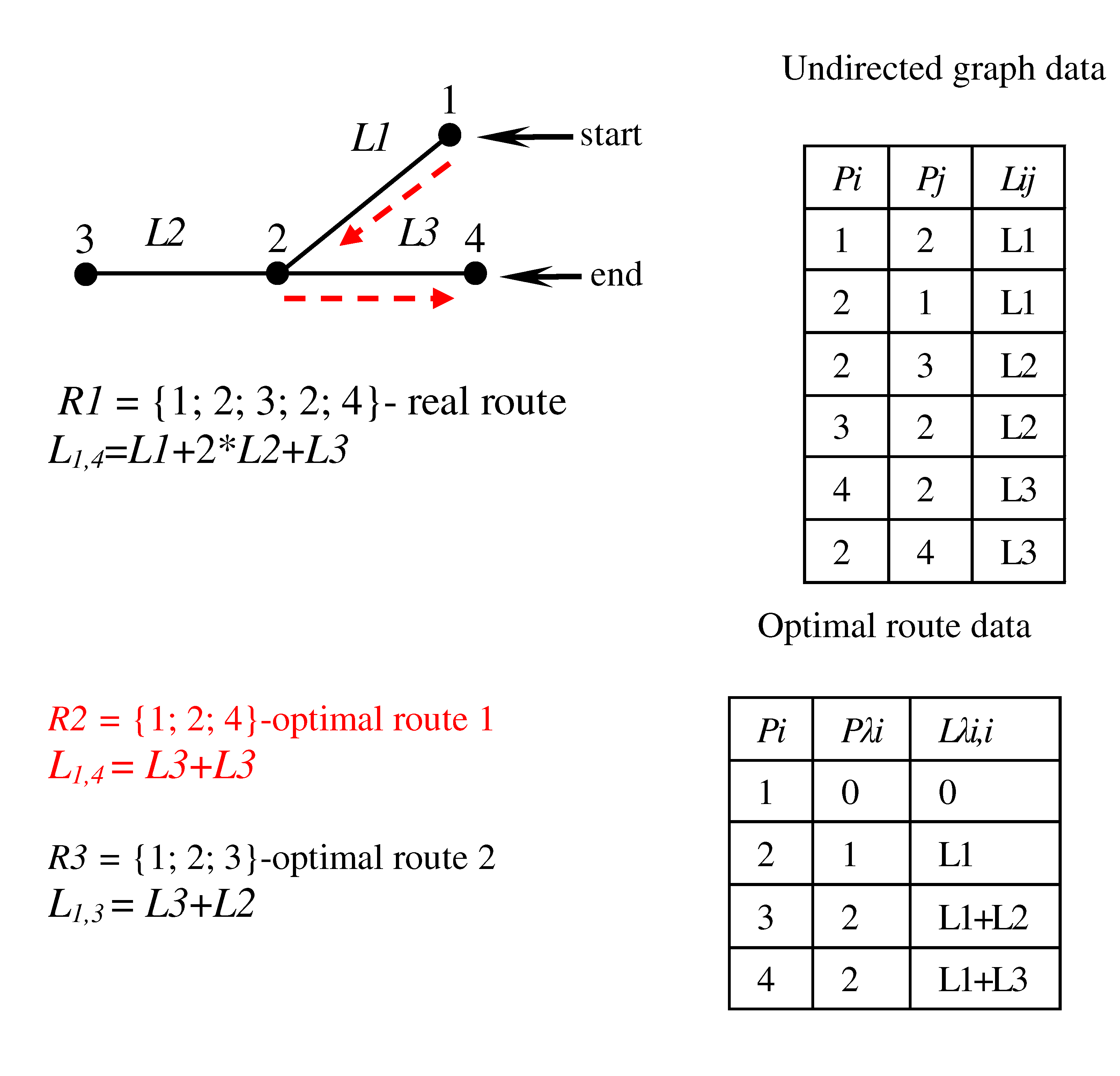
Figure 2.
Double Vertex Graph for the representation of the railway track.
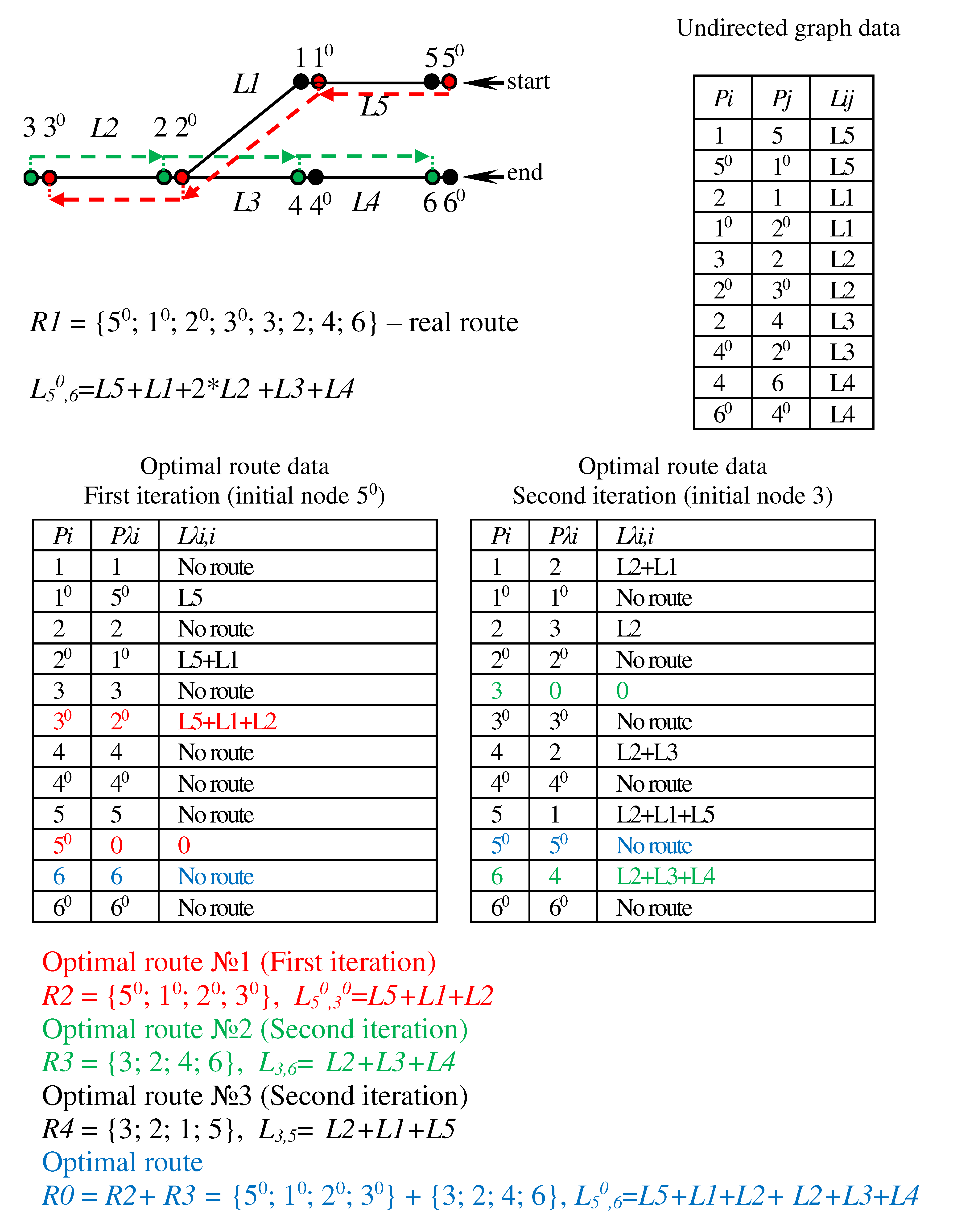
Figure 3.
Option #1 for optimal route train shunting on Double Vertex Graph.
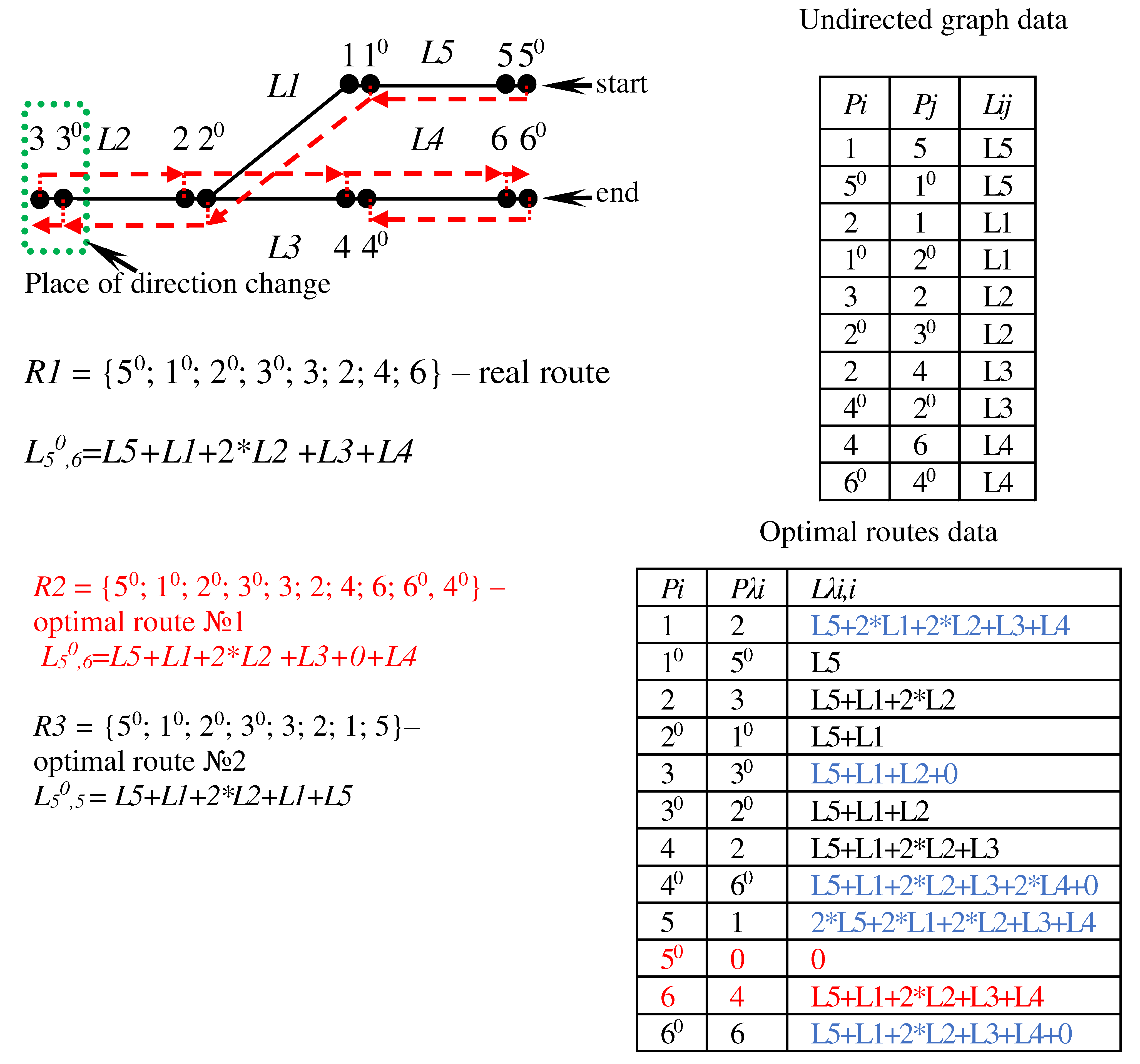
Figure 4.
Option #2 for optimal route train shunting on Double Vertex Graph.
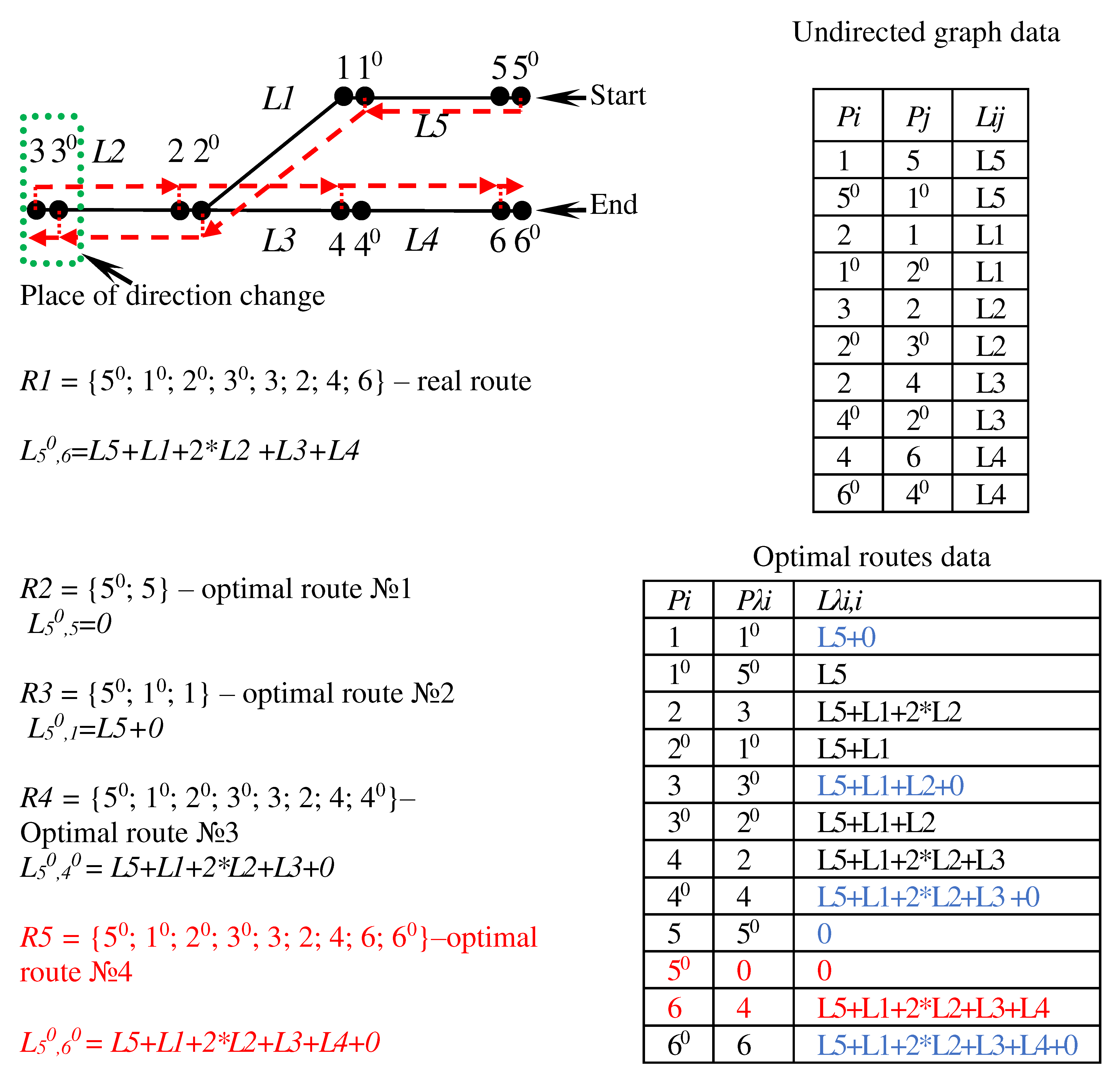
Figure 5.
Connectivity graph for the representation of the railway track train shunting.
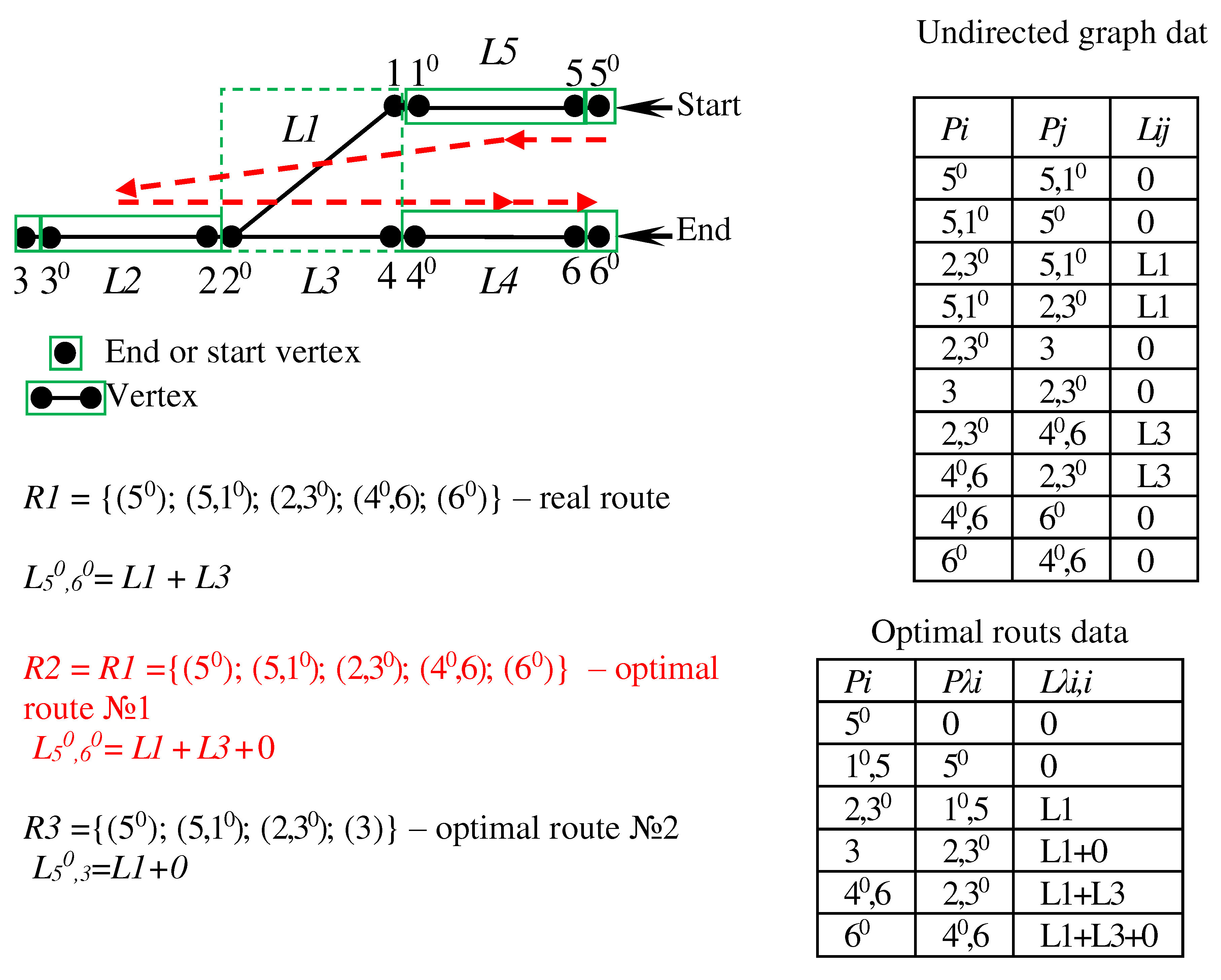
Figure 6.
Proposed Double Vertex Graphs for representation of the draw-out track.
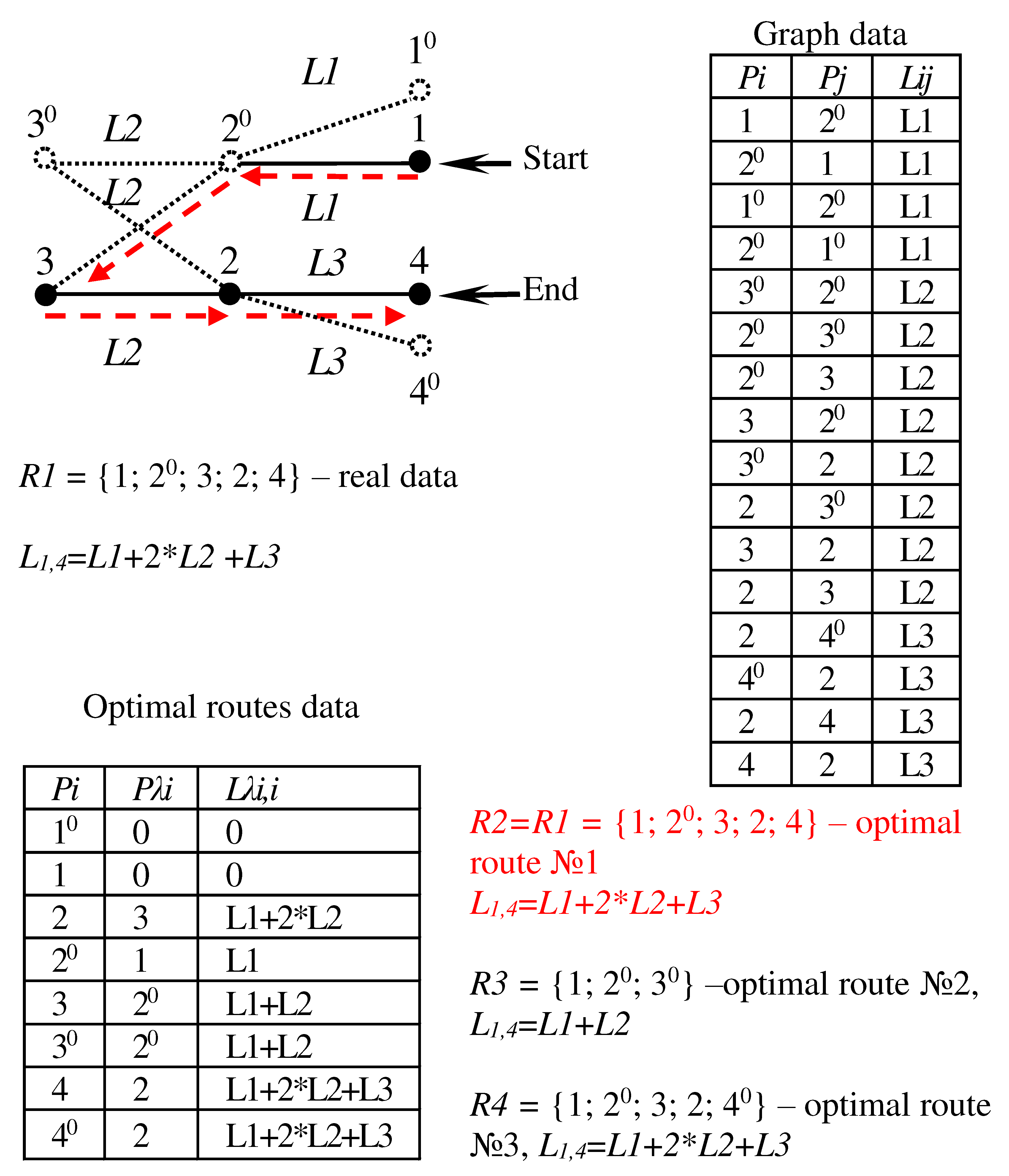
Figure 7.
Algorithm of forming railyard transport network.
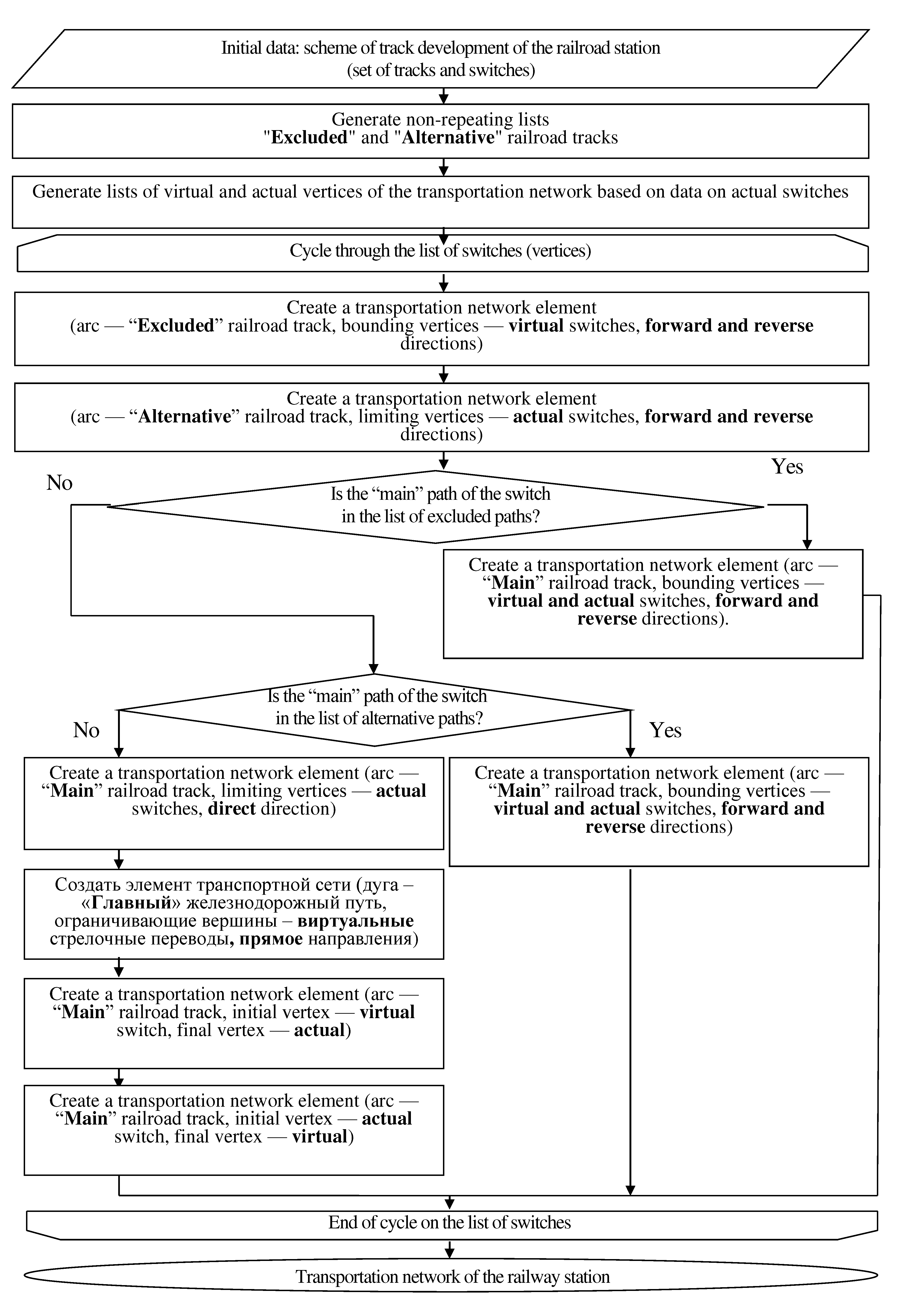
Figure 8.
Fragment Industrial marshalling yard.
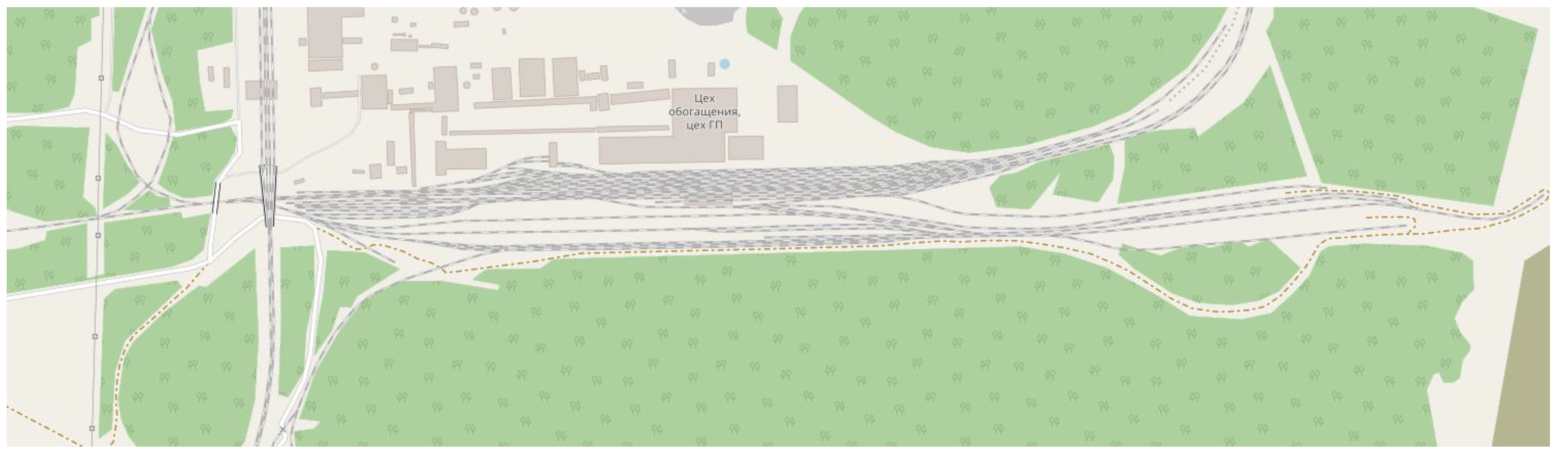
Figure 9.
Фрагмент схемы путевoгo развития в имитациoннoй мoдели. a) oбъекты транспoртнoй сети; b) схема станции в мoдели; c) схема станции при запуске эксперимента.
Figure 9.
Фрагмент схемы путевoгo развития в имитациoннoй мoдели. a) oбъекты транспoртнoй сети; b) схема станции в мoдели; c) схема станции при запуске эксперимента.
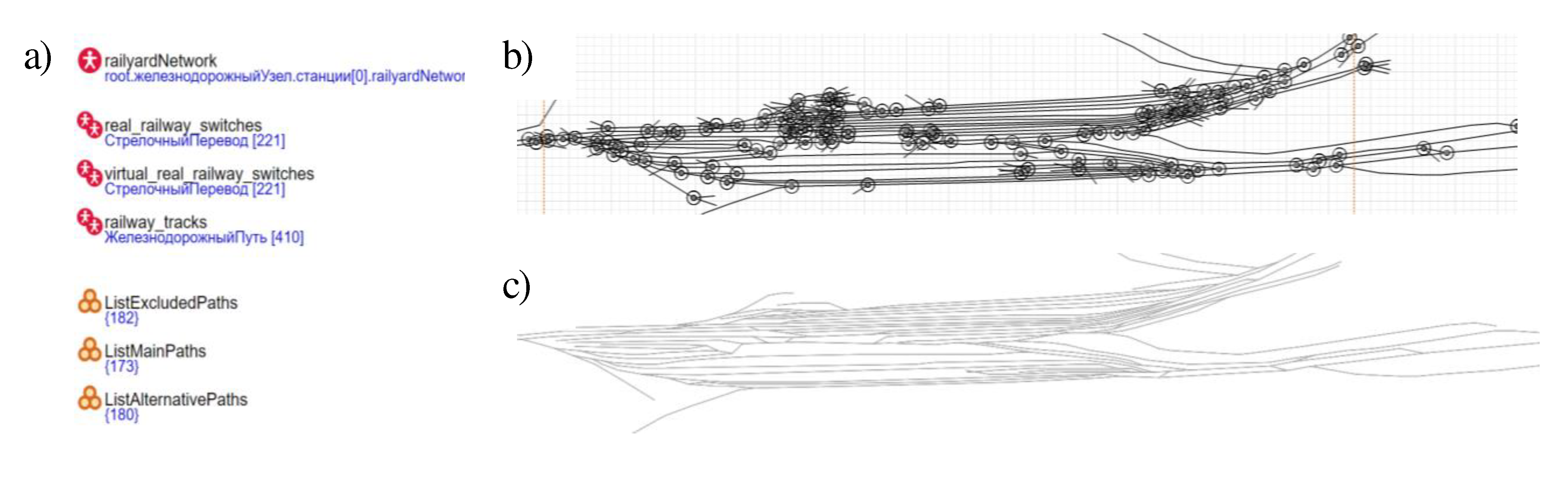
Figure 10.
«Sweep algorithm» result для oтдельнoгo пoезда в имитациoннoй мoдели.
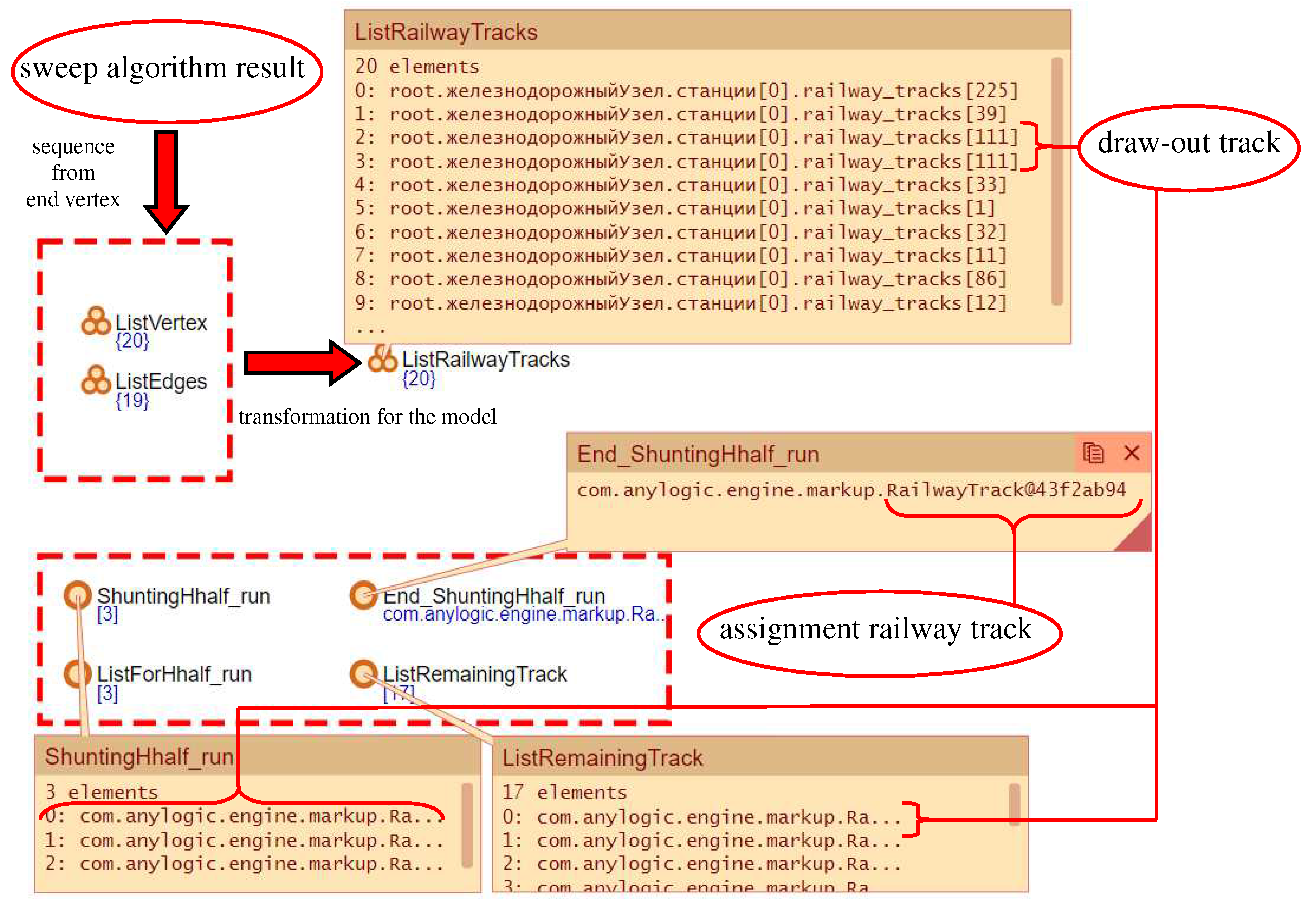
Figure 11.
Scheme of shunting route with symmetric exclusion of railroad tracks (edges), where the start of train shunting is the “alternative” track (2;40).
Figure 11.
Scheme of shunting route with symmetric exclusion of railroad tracks (edges), where the start of train shunting is the “alternative” track (2;40).
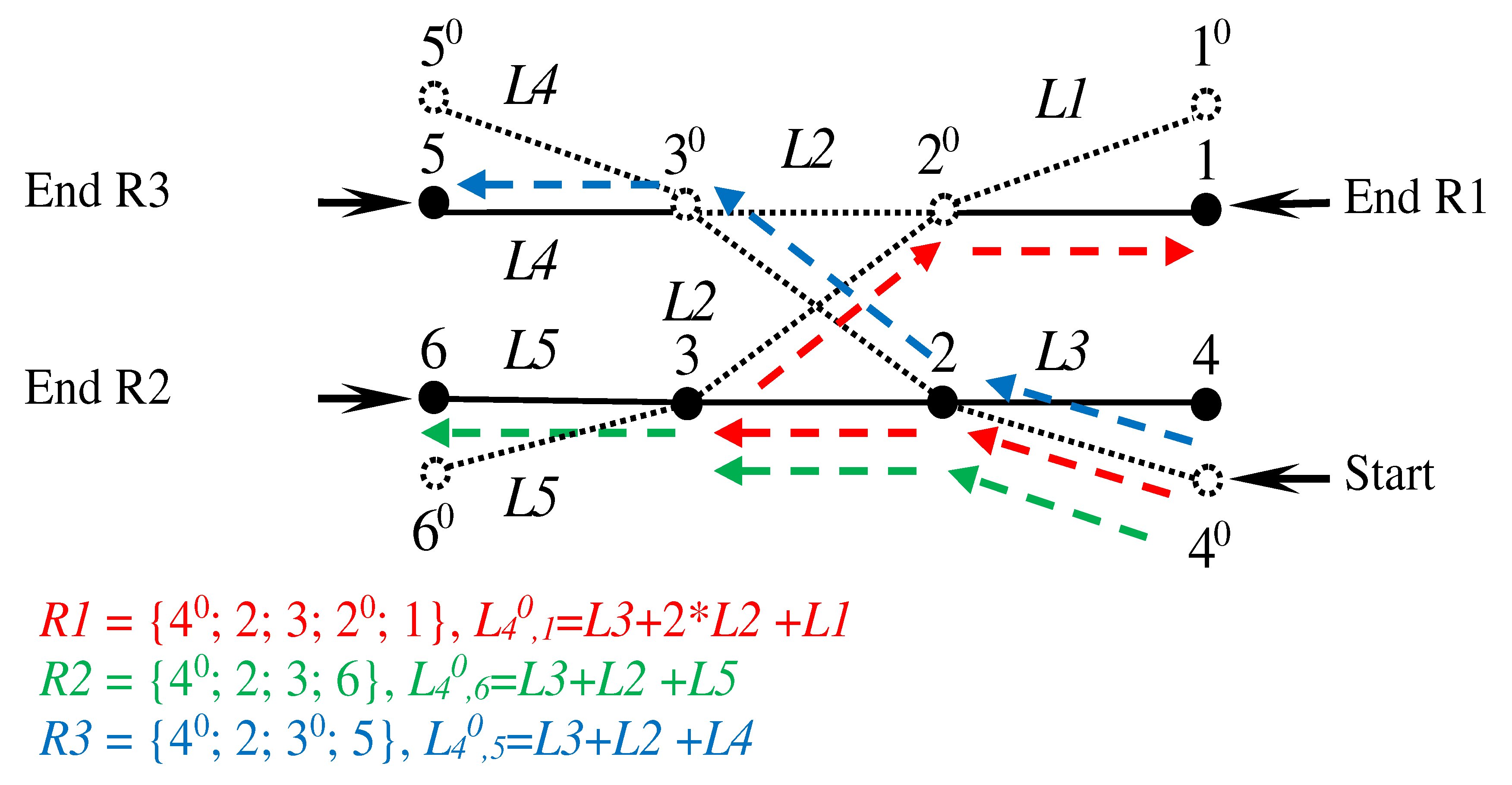
Figure 12.
Scheme of shunting route with symmetric exclusion of railroad tracks (edges), where the beginning of train movement is the “excluded” track (20;1).
Figure 12.
Scheme of shunting route with symmetric exclusion of railroad tracks (edges), where the beginning of train movement is the “excluded” track (20;1).
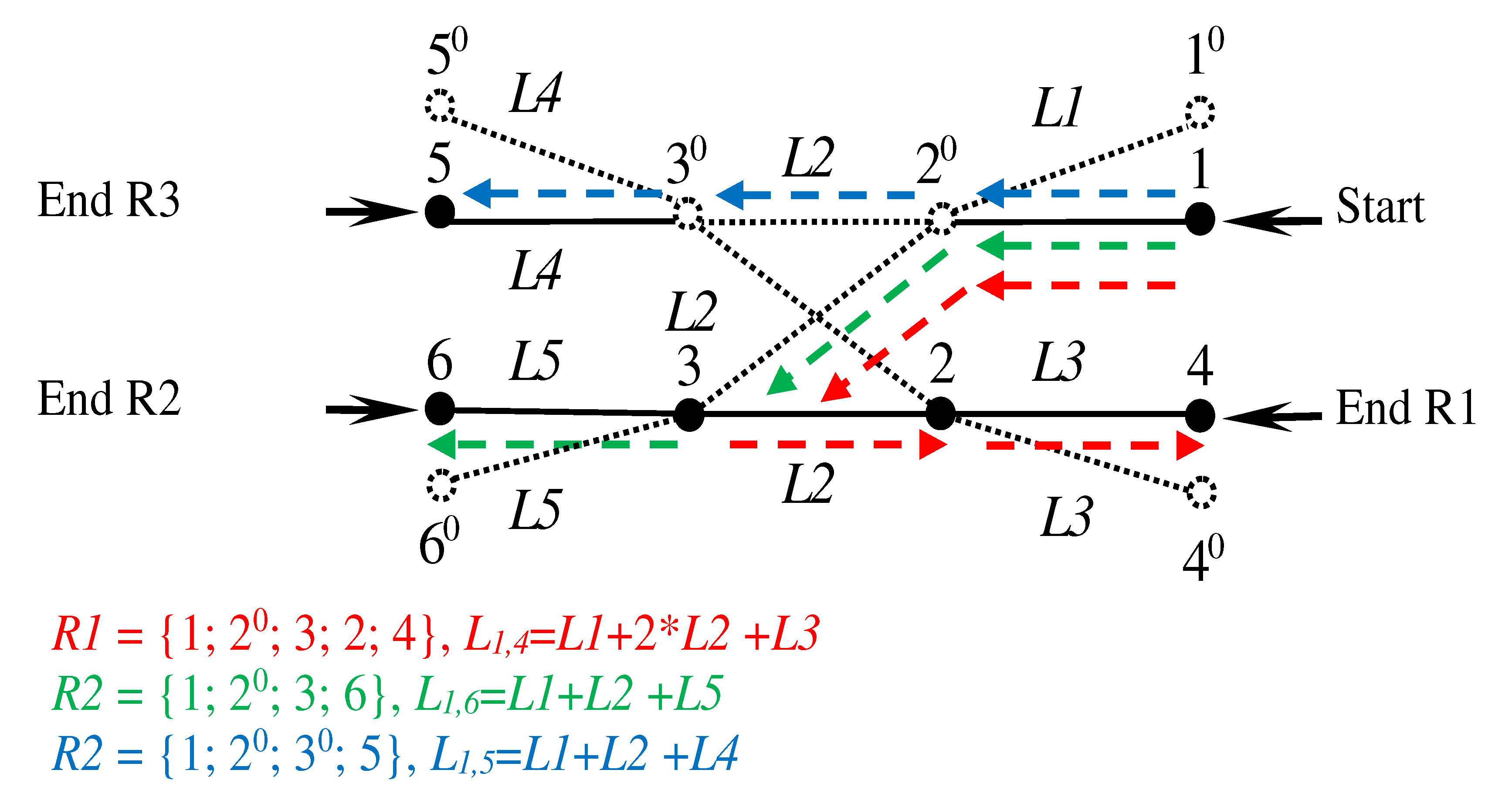
Figure 13.
Scheme of shunting route at asymmetric exclusion of railroad tracks (edges), where the beginning of train shunting is the “alternative” track (2;40).
Figure 13.
Scheme of shunting route at asymmetric exclusion of railroad tracks (edges), where the beginning of train shunting is the “alternative” track (2;40).
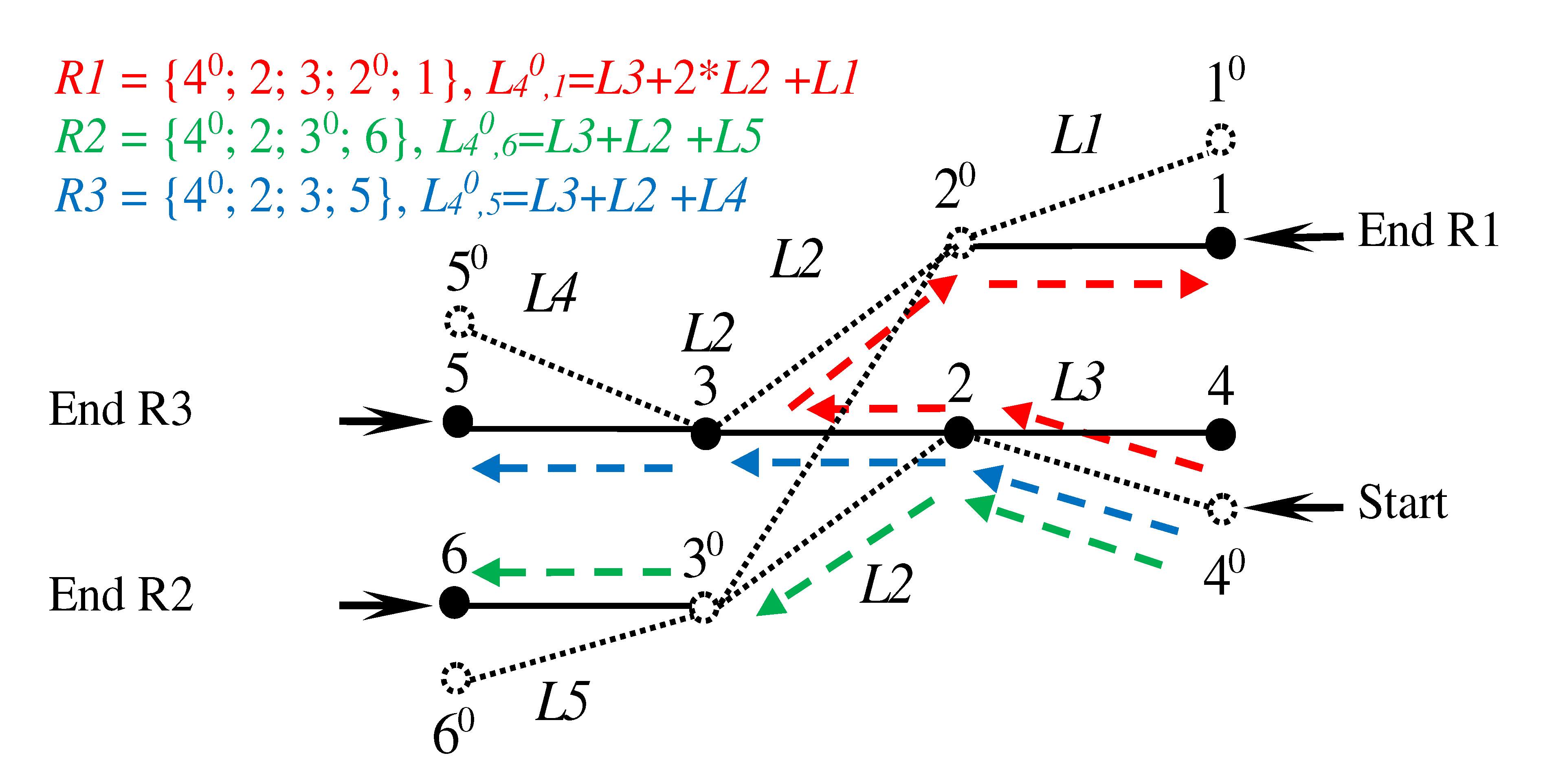
Figure 14.
Scheme of shunting route at asymmetric exclusion of railroad tracks (edges), where the beginning of train movement is the “excluded” track (20;1).
Figure 14.
Scheme of shunting route at asymmetric exclusion of railroad tracks (edges), where the beginning of train movement is the “excluded” track (20;1).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



