
Submitted:
22 December 2023
Posted:
26 December 2023
You are already at the latest version
Abstract
This paper presents a thorough review of Electrical Muscle Stimulation (EMS) in the context of Augmented Reality (AR) and Virtual Reality (VR), specifically focusing on its application in providing kinesthetic feedback. Our systematic review of 17 studies reveals the growing interest and potential of EMS in this domain, as evidenced by the growing body of literature and citations. Key elements presented in our review encompass a catalog of the applications developed to date, specifics of the stimulation parameters used, the participant demographics of the studies, and the types of measures used in these research efforts. We discovered that EMS offers a versatile range of applications in AR/VR, from simulating physical interactions like touching virtual walls or objects, to replicating the sensation of weight and impact. Notably, EMS has shown effectiveness in areas such as object handling and musical rhythm learning, indicating its broader potential beyond conventional haptic feedback mechanisms. However, our review also highlights major challenges in the research, such as inconsistent reporting of EMS parameters and a lack of diversity in study participants. These issues underscore the need for improved reporting standards and more inclusive research approaches to ensure wider applicability and reproducibility of results.
Keywords:
Augmented reality
; electrical muscle stimulation
; haptic feedback
; kinesthetic feedback
; virtual reality
1. Introduction
Haptics is a crucial component of an immersive virtual reality (VR) system [1]. It makes the interaction and handling of VR objects more "intuitive and efficient" [2]. Haptic feedback [3,4] and even passive haptics [5] are shown to increase the sense of presence, which is described as the feeling of "being there", in a virtual environment [6]. More specifically, haptic feedback is shown to be at least as important as visual feedback for the sense of presence, and in some cases even more important [7]. Furthermore, the sense of presence that the haptic feedback delivers increases with the fidelity of the feedback system [7]. Finally, haptic feedback can increase social presence [8].
Our haptic feedback system is based on so-called mechanoreceptors, which are located under the human skin, in the muscles, and in the muscle joints [9]. The activation of these mechanoreceptors produces a signal that travels to our brain and encodes different properties about the objects that we are manipulating. Such properties are the pressure that we exert on an object, the temperature, the texture, the stiffness of the object, or even the position and orientation of our limbs [9].
Haptic feedback can be generally divided into two categories: i) tactile (or cutaneous) feedback and ii) kinesthetic (or proprioceptive) feedback [10].
Tactile feedback plays an integral role in haptic perception. It relies primarily on four types of mechanoreceptors: Pacinian corpuscles, Merkel’s disks, Meissner’s corpuscles, and Ruffini’s corpuscles. Each type contributes to a unique sensation ranging from high-frequency vibration to pressure perception [9].
Kinesthetic feedback, being the focal point of this paper, is often regarded as the "sixth sense". Kinesthetic feedback plays a crucial role in our perception of body positioning and movement. This form of feedback is facilitated by proprioceptors located in muscles, skin, joints, and tendons. Noteworthy proprioceptors include muscle spindles, which monitor changes in muscle length and the speed of such changes, and the Golgi tendon organ (GTO), which observes muscle tension. Other proprioceptors such as Ruffini endings, Pacinian corpuscles, and Golgi-like receptors also contribute to our sense of body position and movement [11].
Historically, the activation of proprioceptors has primarily relied on methods requiring direct physical interaction with the user. These encompass wearable robotic systems [12], exoskeleton devices [13], and even pulley systems worn on the body [14]. These methods, designed to mechanically stimulate proprioceptors, have several inherent drawbacks. They often require a sizable hardware setup, posing both a significant inconvenience and a physical burden to the user. This necessitates a crucial shift towards more practical and user-friendly alternatives in contemporary research on proprioceptive stimulation. While non-contact approaches, such as those employing airborne ultrasound technology for haptic feedback [15,16,17], do exist, they are not yet as reliable or precise as their mechanical counterparts, making their widespread adoption in practical applications more challenging.
1.1. Electrical Muscle Stimulation for Haptics
Electrical Muscle Stimulation (EMS) presents itself as an innovative and effective alternative to mechanical actuators, offering indirect activation of proprioceptors to provide kinesthetic feedback. Pioneering research into this area traces back to 2006, when it was proposed that EMS could be leveraged to induce muscle contractions synchronous with haptic events [18]. In essence, EMS works by delivering controlled electrical pulses to a target muscle group. These pulses mimic the signals that nerves ordinarily transmit to initiate muscle contraction. When the electrical signal reaches the muscles, they respond by contracting, a process that consequently activates the proprioceptors. This method capitalizes on the muscles’ natural function as actuators, eliminating the need for external, mechanical ones. As such, EMS typically demands less space and proves to be more energy-efficient compared to its mechanical counterpart [19]. An example of an EMS system, specifically connected to the forearm and biceps muscles, is illustrated in Figure 1.
EMS finds widespread application across various domains, notably in rehabilitation, where it’s termed Functional Electrical Stimulation (FES). In such settings, EMS significantly aids in supporting voluntary movements, especially in cases where residual muscle tissue is present but the neural pathways from the brain are impaired—common scenarios post spinal injuries or strokes—by directly stimulating the functional muscle tissue. Used as a supplementary therapy, EMS has been progressively adopted to counteract muscle atrophy in adults unable to engage in active mobilization, and it holds promise for averting pediatric intensive care unit-acquired weakness (PICUAW) [20]. Beyond rehabilitation, EMS is extensively used for muscle training, promoting muscle growth and endurance. When combined with resistance training, EMS has been reported to improve muscle strength and functional performance in older individuals [21]. Furthermore, designated as Transcutaneous Electrical Nerve Stimulation (TENS), it is utilized for pain relief. This paper focuses on the application of EMS for delivering kinesthetic feedback, which includes the sensation of external forces applied to the body.
AR/VR introduces a novel application for EMS, extending its use beyond traditional domains by providing real-time haptic feedback, thereby enriching user interaction in virtual environments. While EMS may not match the control performance of exoskeletal electric motors due to its slower response, its simplicity and safety are significant advantages in AR/VR applications. These characteristics of EMS make it a practical choice for delivering immersive experiences in virtual settings. Additionally, the adaptability of EMS parameters allows for a customized haptic experience. This adaptability of EMS holds the potential to facilitate a variety of sensory feedback and pave the way for innovative interaction paradigms in AR/VR.
Key parameters in electrical stimulation include pulse form, pulse intensity (in terms of current or voltage), pulse width, and pulse frequency [22]. These parameters are crucially illustrated in Figure 2, which depicts both biphasic and monophasic rectangular pulse forms. Each of these parameters plays a significant role in the effectiveness of EMS:
- Pulse Form: Refers to the shape of the electrical pulse, which can be biphasic, monophasic, sinusoidal, or other forms.
- Pulse Intensity: The level of electrical current’s amplitude during stimulation. Higher pulse intensity leads to more muscle recruitment.
- Pulse Width: The length of time each electrical pulse lasts. Longer pulse width leads to more muscle recruitment.
- Pulse Frequency: The rate at which electrical pulses are delivered, measured in pulses per second (Hertz). It is well known, that higher pulse frequency leads to faster muscle fatigue [23].
Secondary aspects influencing electrical stimulation include pulse rise and fall times, electrode size and placement, and environmental factors like skin temperature and humidity.
2. Review Aims and Scope
This literature review aims to thoroughly explore the current understanding of using EMS for kinesthetic feedback. Our review is guided by several key questions that aim to clarify the role and potential of EMS in this area.
First, we investigate the various applications where EMS is used for kinesthetic feedback as reported in existing studies. Our goal is to compile a detailed list of these applications, where EMS is used to create kinesthetic sensations in different parts of the body.
Next, we examine the EMS stimulation parameters used in these applications. We look at the specific values of these parameters to understand how they affect the quality of the kinesthetic sensations. This part of the review is important to identify the best settings for EMS to provide effective feedback.
Finally, we analyze the research methods used in these studies. This includes looking at the sample sizes and age groups involved, as well as the types of measures used, whether they are based on subjective experiences or objective measurements. This analysis will provide a clearer understanding of the methodologies adopted in these studies and pave the way for new research in this field.
3. Review method
To conduct this comprehensive review, we performed an extensive online search across the scholarly database Web of Science. Our search strategy focused on two main areas: (1) Titles that included terms related to electrical and muscle stimulation, such as ’electromyostimulation’, ’electrostimulation’, ’muscle stimulation’, ’electrical stimulation’, and ’fiber stimulation’; (2) Abstracts covering key aspects of haptics and kinesthetic feedback, including ’kinesthetic’, ’proprioceptive’, ’tactile’, ’force’, ’feedback’, ’sensation’ as well as related concepts like ’motor learning’, ’motor training’, ’movement’, ’motion’, ’poses’, ’postures’, ’kinematics’, ’kinetics’, ’virtual reality’, ’augmented reality’, and ’mixed reality’.
In selecting papers for this review, we were guided by specific criteria to ensure the focus and relevance of our study. We chose to include only non-invasive EMS applications, aiming to draw a clear line between external stimulation techniques and invasive or semi-invasive methods. This distinction was crucial, given the different implications, risks, and ethical considerations of these approaches. Additionally, we decided to exclude studies that combined electrical stimulation with other methods, such as mechanical or vibrotactile stimulation. This helped us isolate the unique effects of EMS on haptic feedback, allowing for a clearer understanding of its direct impact without the interference of other stimulation types.
Furthermore, we limited our review to studies published in English. This decision was made to maintain consistency in our review process and ensure that the volume of literature reviewed was manageable, considering the extensive amount of research published globally.
We adopted the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) methodology to manage the paper selection process. This involved initial screening based on title, followed by abstract review, and eventually, a comprehensive evaluation of the full text for relevant papers, as illustrated in Figure 3. For ambiguous cases where neither title nor abstract provided sufficient information, the full text was examined to determine suitability. After this initial screening, we also closely examined the references within the selected papers to find additional studies that met our inclusion criteria.
4. Review Findings
This section presents the review findings in terms of applications of EMS in kinesthetic feedback, stimulation parameters that were used across the identified literature, and the sample demographics and measures that were used in the studies of the identified literature. Additionally, details such as the specific body parts where EMS was applied, the experimental setups, and the study outcomes can be found in Table A1 in Appendix A.
4.1. Kinesthetic Feedback Applications
The use of EMS for kinesthetic feedback has been explored in various applications, demonstrating its potential to enhance user experiences and interactions. This section presents a compilation of the applications identified in the literature.
Force Feedback: One important application of EMS is for producing force feedback. Lopes et al. [24] used EMS to simulate frictional forces, using counterforces on the user’s forearm during virtual interactions. This approach enabled users to feel resistance akin to pushing a physical object. Pfeiffer et al. [25] explored the potential of EMS-based feedback in virtual training environments. They employed EMS to simulate kinesthetic feedback, such as the sensation of a hand being pushed towards or pulled away from a button, thus aiding trainees in memorizing workflows more efficiently. Similarly, Lopes and Baudisch [26] utilized EMS to create counterforces on the forearm during mobile gaming. By generating force feedback with forces up to 18.7 N, they simulated the haptic sensation of interacting with objects within the game. Khamis et al. [27] also employed EMS to create an immersive force-feedback experience during VR game cut-scenes, heightening the sense of user involvement. In a further advancement, Lee et al. [28] developed a force response model specifically for activating forearm extensor muscles via EMS. This model, using pulse parameters as input, accurately forecasts the elicited force response, contributing significantly to the refinement of EMS-based force-feedback rendering.
Virtual Wall Interactions Creating the perception of touching a virtual wall is a challenging task in VR environments. Researchers have explored different approaches using EMS to enhance the haptic feedback during virtual wall interactions. Lopes et al. [29] developed a wearable system that utilizes EMS to prevent the user’s arm from passing through a virtual wall. By applying short-duration stimuli, they create a repulsion effect that gives the user the sensation of touching the wall. Another approach proposed by Harris et al. [30] involves stimulating the biceps brachii muscle to create a damping behavior for the elbow joint angle, improving the haptic sensation during virtual wall interactions.
Stiffness Perception EMS has also been investigated to simulate the perception of stiffness in virtual objects. Kurita et al. [31] conducted experiments to produce different levels of stiffness using EMS. Although they observed a statistically significant correlation between target stiffness and perceived stiffness, they noted the importance of stimulating multiple muscles simultaneously to achieve a more realistic sensation. Furthermore, the same approaches proposed by Harris et al. [30] and Lopes et al. [29] for simulating virtual wall interactions can be used to convey the stiffness of virtual objects.
Assigning Weight to Virtual Objects Several research initiatives have employed EMS to convey a sensation of "virtual weight" when users handle virtual objects. Lopes et al. [29] applied EMS to stimulate the triceps muscle of users. This stimulation creates a scenario where the users need to actively use their biceps muscle to counterbalance the effect. The interaction between the stimulated triceps and the actively engaged biceps helps in creating a sensation of holding an object with weight in a virtual environment. Meanwhile, in a study conducted by Faltaous et al. [32], participants performed dumbbell biceps curls as EMS was applied to four distinct muscles implicated in the arm movements. Their findings indicated that the biceps brachii and triceps brachii’s actuation had the most significant impact on weight perception. Lastly, Galofaro et al. [33] developed an experimental setup to enhance user interactions with virtual reality objects. Specifically, their focus was on users holding and lifting a virtual cube, with the key aspect being the ability to perceive the cube’s weight as if it were a real object. In a virtual environment, when a user ’lifts’ the virtual cube, the stimulation of the triceps creates a physical sensation that mimics the effort required to lift a real object. This muscle contraction, and the resulting extension force at the elbow, effectively simulates the torque or rotational force one would experience while actually lifting an object.
Perceiving Impact with Virtual Objects The use of EMS to create the sensation of having an impact with virtual objects has been a subject of exploration in recent studies. Kruijff et al. [18] pioneered the exploration of EMS for kinesthetic feedback, termed ’pseudo-haptic’ feedback in their research, by replicating the sensations of bullet impacts or explosions in gaming scenarios. Their research covered various aspects such as the perception of pain, reaction loss, feedback quality, excitement, and the likelihood of continued use. In Lopes et al. [24] the user pushed a virtual object and when the object "hit" a wall in the physical environment, the user felt a bumping sensation on their shoulders and wrists. Additionally, Ishimaru et al. [34] focused on creating the sensation of bumps during virtual interactions. They demonstrated that electrical stimulation is superior to mechanical vibration for simulating large bumps and uneven surfaces, providing a more realistic haptic experience.
Interacting and Handling Objects In their innovative study, Lopes et al. [35] introduced the concept of proprioceptive interaction, exemplified through a wearable prototype that leverages the user’s proprioceptive sense for both input and output. This means using body pose as a bidirectional communication channel between the human and the computer. The study demonstrated two forms of interaction: symmetric, where input and output occur in the same limb, and asymmetric, involving different limbs for input and output. For instance, users manipulated a video-scrubbing tool through wrist flexion, with EMS stimulating their wrist muscles for improved control in a symmetric interaction. In contrast, an asymmetric interaction was showcased where users played a solitaire game and a modified version of ’Pong,’ with one hand controlled by the EMS device and the other by the user. Lopes et al. [36] delves into various applications of EMS in guiding hand movements for operating objects, assisting with the use of multifunctional tools, and facilitating interactions with objects that change dynamically. This includes using EMS for preemptive guidance during diverse interactions with objects, offering a more intuitive and responsive experience.
Other applications EMS has also been utilized to facilitate correct movements for learning to play musical instruments [37] and enhance the haptic feedback in a Mixed-Reality (MR) tennis game [38]. Furthermore, Pfeiffer et al. [39] demonstrates the use of EMS as a haptic feedback method in interactive public display environments, highlighting its potential as a subtle and privacy-preserving alternative to visual and acoustic feedback. The authors envision the integration of EMS technology into smart clothing or wearable devices to enhance interaction in public spaces.
4.2. Stimulation Parameters
The utilized pulse form was mentioned in 6 out of the 17 reports. Notably, among those 6, biphasic pulses were the predominant type used, as cited in the references Kruijff et al. [18], Lopes and Baudisch [26], Lee et al. [28], Harris et al. [30], Lopes et al. [35]. Only one report was identified that utilized monophasic rectangular pulses [31].
The utilized pulse amplitude was mentioned in 8 out of 17 reports. Three reports used a current amplitude ranging from 10 mA to 27 mA [18,24,29], one report limited the current up to 80 mA [30], two reports limited the current up to 100 mA [35,36], and one report limited the current up to 150 mA [33]. Notably, two reports defined the minimum and maximum current amplitudes through a calibration process [26,28]. The minimum current amplitude was established as the motor threshold—where observable muscle contractions occur—and the maximum current amplitude was identified as the self-reported pain threshold of the user.
The utilized pulse width was mentioned in 13 out of 17 reports. The values ranged between 25 and 800 . One study used a pulse width that varied between 1 and 60 [33]. Seven reports used a pulse width less than 300 [26,27,29,30,35,36,39], three reports used up to 420 [24,28,31], one report used up to 500 [34], and one report used up to 800 [37].
The utilized pulse frequency was mentioned in 11 out of 17 reports. Pulse frequency in most reports was in the range from 20 Hz to 70 Hz [26,28,31,33,34,37,39]. The lowest pulse frequency was 5 Hz [18]. Only two reports used a pulse frequency in the range between 100 Hz [27] and 120 Hz [35]. The highest reported frequency was found in Lopes et al. [36] with a value of 140 Hz.
To provide a clear comparison, these parameters have been grouped based on similarities in values found among the studies. These are outlined, along with their corresponding ranges, in Table 1.
4.3. Samples and Measures
The studies analyzed in this review exhibited significant variation in sample size, with the smallest study involving a group of four participants [31], and the largest encompassing a group of 22 individuals [27]. The demographic profile of the samples predominantly featured male participants, as depicted in Figure 4. In total, there were 83 male participants in total across all studies, compared to 30 female participants.
The participant base was relatively youthful, with average ages spanning from 22 to 31.2 years across various studies. For those studies that disclosed participant ages, we synthesized an approximation of the age distribution across all research. This age distribution is illustrated in Figure 5.
Regarding the type of measures employed, the reviewed studies showcased a blend of objective and subjective techniques, with some adopting one or the other, and several employing a mix of both.
Objective measures, including force measurement [26,28,31,33,34], angle measurement [30,33,35], time duration [25], and hand position [37] were used in nine of the studies to ascertain the physical implications of electrical stimulation.
Twelve studies used subjective measures like Likert scales, questionnaires, interviews [18,24,25,26,29,32,33,34,35,36,37] and the Igroup Presence Questionnaire (IPQ) [27]. Those were designed to capture the participants’ personal perceptions and experiences. The use of Likert scales provided insights into participants’ thoughts on various factors which among others include the intensity of the stimulation, the perceived weight, the realism of the simulated experience, their presence within the virtual environment, the consistency and the naturalness of feedback, their enjoyment levels or pleasantness, comfort, and their personal preferences.
5. Discussion
5.1. Summary of Findings
This investigation focuses on the emerging area of EMS for kinesthetic feedback, especially in AR and VR. Although still a developing field, with only 17 published reports, the increasing number of citations each year, as shown in Figure 6, suggests a growing interest in this research area. EMS has the capacity to offer a viable alternative to conventional mechanical haptic devices. By generating substantial forces, EMS opens up new avenues for crafting more realistic and immersive haptic experiences in AR and VR.
The effectiveness of EMS in AR/VR environments is further supported by the positive feedback found in the literature. Studies have shown that users find EMS feedback to be more enjoyable [24,26,29,35], preferred [29], and realistic [24,27,29] compared to vibrotactile feedback. Notably, one study highlighted that EMS was superior to vibrotactile and no feedback in enhancing the sense of presence, involvement, and immersion in these environments [27].
Furthermore, the studies identified underscore the particular utility of EMS in facilitating object handling. In a noteworthy experiment Lopes et al. [36], where EMS was employed to communicate object usage to the user, an impressive 76% of participants accurately guessed the communicated usage. The application of EMS even extended to supporting musical endeavors, specifically in replicating accurate music rhythms, with half of the participants demonstrating the ability to reproduce the correct rhythm. Further evidence of EMS’s prowess in object handling comes from [25], which revealed that EMS can effectively aid trainees in remembering workflows, particularly in button-pressing tasks. A striking success rate of 89 out of 96 tasks stands testament to this fact.
Building on the unique benefits of EMS in AR/VR environments, it’s insightful to compare EMS with vibrotactile feedback, another prevalent haptic technology. In situations demanding quick and precise motor responses, EMS has shown notable advantages. A study illustrated this advantage in a task where participants needed to stop a hand movement upon receiving sensory feedback. Both EMS and vibrotactile feedback outperformed visual cues regarding response time, yet EMS was particularly effective in reducing errors, a critical aspect for high-stakes applications [40]. This data underscores the reliability and precision of EMS as a feedback modality, traits essential in fields where accuracy and timeliness are paramount.
Pedro Lopes and Patrick Baudisch from the Hasso Plattner Institute, Potsdam, Germany, emerge as significant contributors to the upward thrust of this burgeoning research area. With their five pioneering works, which have amassed a collective total of 746 citations, they have successfully paved the way for further exploration and developments in the field. Their contributions encompass a broad spectrum of applications in the realm of AR and VR, from incorporating force feedback in MR games [24], introducing haptics for virtual walls and the perceived weight of heavy virtual objects [29], and developing systems for objects to communicate their intended usage [36], to enhancing mobile gaming experiences through force feedback [26], and devising an innovative EMS-based system that interfaces seamlessly with the human body for eye-free wearable interaction [35].
Through this literature review, we have successfully explored and answered three key inquiries central to the understanding of EMS and its potential applications in kinesthetic feedback.
In terms of applications, we found EMS’s use-cases to be impressively diverse, ranging from the simulation of haptic experiences like impact from an object in MR, to facilitating music learning, and even replicating the sensation of weight in virtual objects.
Considering the stimulation parameters utilized across studies, it was observed that while there was some degree of variation, these parameters predominantly fell within specific ranges. The pulse amplitude typically ranged between 1 mA and 100 mA, pulse width varied from 25 to 800 , and pulse frequency spanned from 3 Hz to 120 Hz. The most common parameter values were within the ranges of 1-80 mA for the pulse amplitude, 100-300 for pulse width, and 20-60 Hz for pulse frequency.
Finally, concerning the participant samples and measures utilized in the studies, it was observed that the majority of the participants were young males, specifically between the ages of 20-30 years, as indicated by Figure 4 and Figure 5. This demographic skew may present limitations in the generalizability of the results. The measures employed in these studies were diverse, including Likert scales, questionnaires, interviews, force measurements, angle measurements, and position measurements, demonstrating the breadth of techniques used to gauge and understand the impact of EMS in various contexts.
5.2. Limitations
This examination has highlighted a significant inconsistency in the reporting of stimulation parameters within the surveyed literature. Only six out of 17 papers provided detailed descriptions of the pulse form, and an equivalent number reported the pulse amplitude in milliamperes. Pulse frequency was slightly more often mentioned, found in 11 reports. Despite being somewhat more common, pulse width was still insufficiently documented, appearing in 13 out of the 17 reviewed documents.
Remarkably, none of the studies provided a full description of all four essential parameters, which poses a significant barrier to the replication of EMS studies. The absence of such comprehensive data points to a dire need for increased methodological stringency in EMS study reporting practices, as study replication is a fundamental element of scientific progress.
Positively, four papers did present information on pulse form, width, and frequency, which are essential for replicating EMS protocols. Although current amplitude is also crucial, its value can be determined through calibration and may vary from one subject to another.
Beyond the parameters of the EMS, the reporting on electrode size and placement is just as crucial but was found to be greatly lacking as well. Barely four papers included any specifics about the electrode sizes, and none provided details on the placement process.
The absence of such critical information, which would indicate the target muscle areas and ensure consistent placement across subjects, compromises the replicability that is central to scientific inquiry. This points to an urgent call for uniform and detailed reporting guidelines in EMS research to guarantee the dependability and reproducibility of experimental results.
The observed underreporting of EMS parameters and details about electrode size and positioning could stem from various underlying issues. The lack of research-wide standards regarding required details could lead to reporting inconsistencies. The importance of these specifics for the replication of EMS research may not be fully appreciated, resulting in their neglect. Moreover, the intricacies involved in applying EMS parameters and the complexities of their use in research might not be well-understood by all researchers, particularly those new to the field. There is a clear necessity to establish and promote a universal reporting standard that addresses these critical parameters to enhance the scientific integrity of the research community.
5.3. Recommendations for future research
Fast-Tracking EMS Prototyping via Toolkits and Advanced Wearables: Building applications for EMS is a multifaceted task, demanding in-depth expertise in hardware, software, and understanding of physiological features. Recognizing this complexity, the "Let Your Body Move" toolkit has been developed by [41] to streamline EMS prototyping. This comprehensive toolkit offers a Bluetooth-equipped hardware control module that uses standard EMS devices for signal generation. Moreover, it incorporates an intuitive communication protocol to link mobile devices and provides a suite of base control applications designed for initiating EMS prototyping. To facilitate user interaction, the toolkit also explains EMS-specific parameters, skin electrode placement, and user calibration methods. During a workshop involving haptic researchers, the toolkit demonstrated its capability to rapidly produce sophisticated prototypes. Open-source access to all the hardware and software components further extends its reach and utility.
In the evolving landscape of EMS prototyping, the introduction of the TeslaSuit [42], a full-body suit equipped with EMS technology, marks a significant advancement. With its 80 channels, frequencies ranging from 1-150 Hz, and capability to deliver up to 150 mA, it extends the possibilities for immersive virtual experiences. Its intricate integration of EMS with motion capture technology includes 14 IMUs that can function in either 6-axis or 9-axis modes. The suit’s biometric system, capable of heart monitoring, pulse rate variability, and assessing physical condition, adds a layer of physiological understanding, potentially providing insights into muscle fatigue, a characteristic phenomenon of EMS. By unifying a broad spectrum of functionalities, the TeslaSuit opens new avenues in the field of VR interaction and EMS prototyping, contributing to the continued innovation and growth of haptic technology and human-computer interaction.
Another pivotal advancement in EMS prototyping is the UnlimitedHand device [43]. This wearable facilitates seamless interaction within virtual environments. It utilizes an 8-channel photo-reflector array to detect wrist and finger movements by monitoring the forearm’s muscle displacements. Additionally, the device employs EMS through its 8-channel electrodes to produce haptic feedback, inducing involuntary hand gestures. What sets UnlimitedHand apart is its efficient design, ensuring electrodes and sensors align naturally with major forearm muscle groups. This strategic design significantly reduces calibration time, with tests indicating adaptation to a user’s forearm in just 10 seconds, streamlining the process for haptic feedback applications and manipulation in VR scenarios.
Constructing a Quantitative Model for EMS: Delving deeper into the significance of establishing a quantitative model for EMS, we recognize that the intricacies of EMS effects on kinesthetic sensation remain poorly understood due to the subjective nature of human perception. The complexity arises from the multifactorial influence of EMS parameters on how we perceive force and weight, making a one-size-fits-all approach insufficient. Consequently, a rigorous quantitative model is not just a beneficial addition to the field but a necessity for progress.
The process of developing such a model begins with the collection of extensive empirical data, correlating specific EMS parameters—such as pulse form, amplitude, width, and frequency—with the kinesthetic sensations they elicit. This endeavor involves an experimental setup, where participants undergo EMS under controlled conditions while providing feedback on their perceived sensations, akin to holding varying weights in a virtual environment. This feedback is critical, as it provides the subjective data needed to inform and refine the model.
Building upon the groundwork laid by [29], we can explore how different EMS settings can simulate the sensation of weight. For example, altering pulse amplitude and width may give the impression of lifting a heavier or lighter virtual object. By integrating the data from [44], which monitors muscle contraction in real-time using infrared optical sensing, we can achieve a dynamic model that adjusts in response to individual muscle responses, ensuring consistent and shared kinesthetic experiences among users.
Incorporating real-time muscular feedback with sophisticated mathematical modeling techniques, as discussed in [28] and [31], forms the necessary analytical foundation for accurate prediction and simulation. The inclusion of subjective measurement methods for perceived weight, as researched by [32], integrates a user-centric perspective into the model, connecting quantitative analysis with tangible experiences.
The synthesis of these elements—empirical data, real-time adjustments, mathematical modeling, and subjective analysis—will culminate in a model with the capability to accurately predict the kinesthetic outcome of any given set of EMS parameters for any individual. This not only enhances the customization and effectiveness of EMS applications but also opens up possibilities for more sophisticated interactions within virtual environments.
The practical application of this model could significantly impact the field of kinesthetic feedback in EMS, potentially leading to more realistic virtual simulations and offering benefits in areas like rehabilitative therapy, sports training, and entertainment. Reliable prediction and replication of sensations will empower practitioners and developers to craft safe and engaging experiences, fully leveraging the diverse capabilities of EMS.
Promoting Standardized Reporting and Diversifying Participant Demographics: To address the issues of underreporting and inconsistencies in EMS research, the adoption of a universally accepted standardized reporting methodology is essential. Such a methodology would serve as the foundation for thorough documentation of EMS usage, mandating the detailed description of electrical pulse properties—including shape, intensity, duration, and frequency—as well as exhaustive characterizations of electrode types and their specific body placements. This level of detail is particularly critical in the realm of kinesthetic feedback, where subtle variables significantly influence the outcomes and experiences of the study participants.
The implementation of this standardized reporting will be realized through a collaborative effort with experts in the field to formulate comprehensive guidelines. These guidelines will be designed to capture the important aspects of kinesthetic feedback mechanisms and will be promoted through scholarly channels and at academic conferences to ensure wide adoption.
Moreover, enriching our research with a diverse range of participants is indispensable. The subjective nature of kinesthetic feedback requires the representation of various demographics to produce findings that are truly representative and applicable to a wider audience. We intend to design recruitment strategies that are intentionally inclusive, ensuring a wide array of genders, ages, and backgrounds are represented in the research data.
The anticipated outcome of these endeavors is a significant leap forward in the reliability and utility of EMS research. With standardization, researchers can replicate and validate findings with greater ease, accelerating the development of innovative kinesthetic feedback applications. Diverse participant involvement will enhance the generalizability of research outcomes, leading to more personalized and universally beneficial EMS technologies. Ultimately, these steps will strengthen the field of kinesthetic feedback research, making it more robust, ethical, and impactful.
6. Conclusion
This comprehensive review has underscored the significant potential and rapid development of EMS for kinesthetic feedback in AR and VR environments. Despite the field’s early stage, evidenced by a limited number of published reports, the increasing trend in citations highlights a growing scholarly interest. EMS’s potential as an alternative to traditional mechanical haptic devices is reinforced by its ability to generate substantial forces and its positive reception in terms of enjoyment, preference, and realism.
Our investigation reveals EMS’s versatility in applications ranging from simulating haptic experiences in MR to aiding music learning and accurately replicating the sensation of weight in virtual objects. The successful application of EMS in object handling and its effectiveness in facilitating learning processes.
The contributions of key researchers such as Pedro Lopes and Patrick Baudisch have been instrumental in advancing this field. Their works have opened new avenues for immersive experiences in AR and VR, setting a solid groundwork for future explorations.
However, this review also highlights critical challenges in the field, particularly the inconsistent reporting of stimulation parameters and electrode specifications. The lack of comprehensive documentation poses a significant barrier to reproducibility and scientific progress. The skew in participant demographics towards young males points to a need for more inclusive research designs.
Future research should focus on fast-tracking EMS prototyping through toolkits and advanced wearables, constructing a quantitative model for EMS, and promoting standardized reporting while diversifying participant demographics. The development of a quantitative model correlating stimulation parameters with kinesthetic sensations is crucial for advancing our understanding of EMS effects. Standardized reporting and inclusive participant samples will improve the reliability, reproducibility, and generalizability of EMS studies.
In conclusion, while EMS for kinesthetic feedback in AR and VR is still an emerging field, it shows immense promise for enhancing immersive experiences. The insights and recommendations from this review provide a roadmap for future research, aiming to elevate the scientific rigor and applicability of EMS in various settings.
Author Contributions
Apostolos Vrontos contributed to writing the original draft, developing the methodology, conducting investigation, conceptualizing the study, and data curation. Verena Nitsch provided supervision, review and editing of the manuscript, and validation. Christopher Brandl was involved in supervision, funding acquisition, manuscript review and editing, and validation.
Funding
This research was funded by Bundesministerium für Bildung und Forschung grant number 16SV8727.
Data Availability Statement
The data presented in this study are openly available in the referenced papers found in https://www.webofscience.com/wos/.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

Table A1.
Summary of the extracted information from the identified literature.
| Paper | Research question/problem | Body part | Experimental setup | Stimulation parameters* | Study | Results |
| Kruijff et al. [18] | Pioneering research in using EMS for force-related haptic feedback | Biceps or brachioradialis muscle | 3D environment Quake3; Laptop; Stimulator Schwa-medico SM; | Form: rect. biph. I: 10-25 mA V: - PW: - F: 3-5 Hz EL: - |
Sample: n=7 (1 female); Age: - Scope: examined EMS intensity for muscle contraction and how to replicate the feeling of being hit by an object Measures: 5-level Likert about overall experience |
Higher fat level and bigger arm required a higher stimulation intensity to activate the muscle; "Pain" and "reaction loss" were rated rather positively; The findings about "feedback", "excitement" and "further usage" were split |
| Farbiz et al. [38] | Developed EMS-based haptic system for tennis in mixed reality | Forearm | Head mounted display, marker tracking, microcontroller, PC with physics simulation | Form: - I: - V: - PW: - F: - EL: 2 |
Sample: - Age: - Scope: - Measures: - |
- |
| Lopes and Baudisch [26] | Developed a portable EMS system that can hide behind a smartphone device and produce force feedback while playing a game | Flexor carpi radialis, flexor digitorium superficialis | Stimulator consists of Arduino Uno and amplifier; smartphone HTC One X; Four reed relays; digital spring-scale to measure force | Form: biph. I: from visible contraction to pain limit V: - PW: 290 F: 25 Hz EL: 4 x pre-gelled |
Sample: 1) n=10 (2 female); 2) n=10 (3 female); Age: 1) M=31.2, SD=9; 2) M=27.4, SD=5.4; Scope: 1) Measure the force from EMS-induced palm flexion; 2) compared EMS with vibrotactile feedback Measures: 5-level Likert |
Study 1: Highest generated force 18.7 N for a pulse duration of 1000 ms; Study 2: EMS feedback more enjoyable than vibrotactile feedback (Mdn=4.5/5); EMS feedback reportedly leads to more positive experience (Mdn=4.5/5) |
| Pfeiffer et al. [39] | Demonstrated the use of EMS for haptic feedback in public spaces | Both lower-arms | Microsoft Kinect, custom EMS-system: Arduino, control unit, battery | Form: - I: - V: - PW: 260 F: 50-70 Hz EL: 4 |
Sample: - Age: - Scope: - Measures: - |
- |
| Lopes et al. [35] | Used EMS on the lower-arm for eyes-free interaction | Extensor digitorum, flexor digitorum superficialis | 3d-printed bracelet, EMS-system: TruTens V3, amplifier X9C103 10Kohm, Arduino Nano & Bluetooth, EMG: AD8221 differential amplifier, Accelerometer: WAX3/WAX9 | Form: Biphasic I: Up to 100 mA V: - PW: 150 F: 120 Hz EL: 4 (50x50mm) |
Sample: 1) 10 participants (3 female), 2) 12 participants (3 female) Age: - Scope: verify interaction concept, investigate emotional response Measures: Goniometer for angle measurement |
Wrist poses recreated by the participants with an average error of 5.8°, all participants reported the feeling of “fun” when playing a custom game |
| Lopes et al. [36] | EMS-based system that allows objects to communicate their use (motion, sequence of movements, time-varying behaviors) to the user | Flexor digitorum, flexor carpi radialis, extensor digitorum, flexor digitorum profundus, biceps brachii | EMS-System (4-channel): X9C102 digital potentiometer, microcontroller (ATMEGA328); 8-camera Optical tracking system: Optitrack, RFID sensor: SM130 Mifare 10MHz | Form: - I: Up to 100 mA V: - PW: 150-250 F: 80-140 Hz EL: up to 4 |
Sample: 12 participants (2 female, 10 male) Age: M=25, SD=3.36 Scope: Evaluate the effectiveness of EMS in conveying the affordance of an object Measures: 7-item Likert scales, questionnaires focusing on the identification of the intended affordance |
76% of participants correctly identified the behaviors the object had been intended to communicate and all participants figured out how to use the object |
| Kurita et al. [31] | Calculated a mathematical model that allows rendering the stiffness of objects as torque at the user’s elbow joint as a function of the applied voltage on the biceps muscle | Biceps muscle | HMD as visual display system ; and EMS system; PC with Unity engine and LabView; ARtoolKit for optical motion tracking; Stimulator ULI-100, Unique Medical Co., Ltd.; D/A converter NI USB-6215; Phantom premium (Sensable Inc.); Force transducer sensor | Form: Mono. rect. I: - V: 0-100 V PW: 0.4 ms F: 50 Hz EL: 2 rectangular |
Sample: n=4 (all male) Age: 22-24 y.o. Scope: The participants pushed with their arm on a haptic device, until the perceived stiffness matched with the EMS-evoked stiffness Measures: Measured force that was generated by stimulation of biceps muscle using a force transducer sensor |
Estimated exerted force and measured exerted force: , ; Target stiffness and perceived stiffness: , ; Maximal stiffness achieved ca. 0.3 N/mm by around 65 V |
| Lopes et al. [29] | Used the system developed in [24] for rendering haptics of heavy objects and "repulsion forces" in VR applications | extensor digitorum, extensor carpis ulnaris, biceps, triceps, infraspinatus, teres major/minor | Stimulator Rehastim, Hasomed, Germany; PC with Unity3D; Optical trackers 8 x Optitrack’s Prime 17W; | Form: - I: 15-20 mA V: - PW: 70-200 F: - EL: 8 electrodes |
Sample: 1) n=13 (4 female); 2) n=6 (1 female); Age: 1) M=22.4, SD=2.1; 2) M=22, SD=2.09; Scope: 1) Realism, consistency, and user-preference of different wall-penetrating methods; 2) Experience of using EMS feedback versus no feedback; Measures: Likert scale |
EMS-rendered soft objects were more believable than hard ones, and repulsion method had the least wall penetration. Most participants preferred EMS over vibrotactile feedback, and it also increased user enjoyment and realism, particularly when combined with electro visuals |
| Harris et al. [30] | Approach that uses EMS-based feedback to evoke the haptic effect of "hitting" a virtual wall | Triceps brachii muscle, Biceps brachii muscle | Torque-Force sensor Futek; 1-DOF elbow platform; Stimulator RehaStim from Hasomed; Potentiometer Midori Green Pot; PC; Quanser Q8-USB and QuaRC; Mathworks Matlab Simulink; Oscilloscope Rigol | Form: biph. rect. I: 0-80 mA V: - PW: First trials 25, 35 and 45 second trials 0-300 F: - EL: hydrogel adhesive |
Sample: n=2 Age: - Scope: Four scenarios are tested: pre-wall at , no pre-wall or antagonist stimulation, antagonist stimulation (biceps) with pre-wall, antagonist stimulation (biceps) no pre-wall Measures: Potentiometer for angle measurement |
The scenarios with the pre-wall performed best, while antagonist stimulation also reduced the oscillations and led to a more realistic result |
| Ebisu et al. [37] | EMS-based system for learning music intstruments | Extensor carpi radialis longus and brevis, brachioradial, gastrcnemius | Arduino, PC, DC power source, electrode pads | Form: - I: - V: 17-29 V PW: 800 F: 50-70 Hz EL: OMRON HV-LLPAD |
Sample: 12 participants (2 female) Age: M=20, SD=2.07 Scope: Evaluate the use of EMS for rhythm learning and helping users play musical instruments Measures: Interviews and position of hand |
50% of participants was able to produce the correct rhythm when using the system |
| Lopes et al. [24] | Developed a mobile EMS system for providing EMS-based force feedback in AR/VR applications | Teres major, Triceps, Biceps, Supinator, Pronator teres, Extensor digitorum, Flexor carpi radialis | EMS system RehaStim2, Windows-based laptop and Microsoft HoloLens | Form: - I: 15-27 mA V: - PW: 100-420 F: - EL: 10 electrodes |
Sample: n=12 (2 female) Age: M=22.7, SD=4.9 Scope: The hypothesis of the study was that EMS-based feedback by the execution of specific applications would lead to higher realism and enjoyment of the users against no EMS feedback Measures: The realism and enjoyment were reported using a seven-level Likert scale |
EMS system led to significantly more realism. And for two out of three applications the enjoyment was significantly higher using EMS-haptic feedback. |
| Khamis et al. [27] | Developed an EMS-based system to elicit physical sensations to different body parts while viewing animation cutscenes in VR games | Deltoid muscle, Biceps, Flexor digitorum superficialis, Extensor digitorum | EMS generator toolkit by [41], EMS control module STIM-PRO X9+, PC with i7 6500k processor, HTC Vive headset with controller, Unity VR | Form: - I: - V: 0-50 V PW: 100 F: 100 Hz EL: 8 pads 5x5cm; 4 pads 10x5cm |
Sample: n=22 (14 females) Age: M=24, SD=3 Scope: Test if the approach leads to more realism and presence of cutscenes in VR animations (conditions: no feedback, vibrotactile feedback, and EMS feedback) Measures: Results rated using IPQ, seven-level Likert questionnaire and interview |
EMS-based feedback outperformed no feedback or vibrotactile feedback on the perceived realism, presence, involvement and sense of being there |
| Pfeiffer et al. [25] | Used EMS in a virtual environment for training employees to remember workflows | Extensor digitorum; Flexor digitorum profundus; | EMS generator toolkit by [41]; EMS control module STIM-PRO X9+; Laptop with Unity3D; HTC Vive controller; HMD SteamVR; | - | Sample: n=8 (2 female) Age: 18-28 y.o. Scope: Test four conditions: i) no haptic feedback, ii) prevent pushing incorrect buttons, iii) encourage pushing correct buttons, iv) last two combined; Measures: Duration and success rate for a sequence are recorded; 5-level Likert about EMS comfort |
The EMS-based feedback was not perceived as uncomfortable and reportedly most of the participants felt that it supported them |
| Lee et al. [28] | Presented a mathematical force response model for the forearm extensor muscles that can be used for applications in haptics | Forearm extensor muscles (extensor digitorum, extensor carpi radialis longus, extensor carpi ulnaris, extensor digiti minimi) | Computer; EMS system RehaMove3, Hasomed, Germany; DAQ board NI USB 6008, National Instruments, USA; amplifier; torque sensor NT-200KC, Sensor solution, Korea | Form: biph. rect. I: specified during calibration phase according to the motor threshold and pain limit V: - PW: 400 F: 20, 30 or 40 Hz EL: 5x5cm, Valutrode, Denmark |
Sample: n=10 (1 female) Age: M=26.4 , SD=1.96 Scope: Compare experimental and estimated peak force (NRMSE, ) in order to prove the validity of presenting the force as an exponential function; Compare experimental and simulated force response in order to prove the validity of the mathematical model Measures: - |
Accuracy of estimated peak force: 0.96, NRMSEAccuracy of force response model: , |
| Ishimaru et al. [34] | Developed a haptic display that emulates hitting bumps with the finger | Near extensor digitorum muscle (exact location is found empirically) | Custom developed stimulator device; PC with touchscreen; Force sensor RS PRO 5000 g | Form: - I: - V: - PW: 0.5 ms F: 60 Hz EL: 2 x single-use 50x35mm |
Sample: n=11 (all male) Age: 21-23 y.o. Scope: 1) Compare the EMS-based approach to other approaches; 2) Compare different EMS-based virtual bumps with real bumps; 3) Examine the wavelength property of the EMS-based virtual bumps Measures: force gauge for force measurement, questionnaire |
The EMS-based approach can substitute the vibro-based approach for virtual bumps with an amplitude greater than 3 mm |
| Faltaous et al. [32] | Investigated which muscles create believable haptic feedback that emulates the weight of virtual objects | Flexor carpi ulnaris, brachioradialis, biceps brachii, triceps brachii | OptiTrack 13W optical tracking system, EMS-system: Let-Your-Body-Move, EMS signal generators: Beurer Sanitas SEM 43 Digital EMS/TENS | Form: - I: - V: - PW: - F: - EL: - |
Sample: n=10 (3 female) Age: MD = 29.5, SD = 12.5 Scope: How stimulating four different muscles affects the perceived weight sensation Measures: Self-reported feedback (7-point Likert scale) for the perceived weight, intensity, and comfort |
Biceps brachii and triceps brachii increase the perceived weight, biceps brachii has the highest actuation intensity, brachioradialis provides the most comfortable actuation |
| Galofaro et al. [33] | Experimental setup designed to augment the interaction with VR objects by generating a haptic sensation of weight in the antagonist muscles | Biceps/triceps | Teslasuit; Oculus Rift S; Unity 3D; ergospirometer Cosmed K5; IMUs; force sensor FUTEK, FSH04416; acquisition board Quanser QPIDe | Form: - I: Up to 150 mA V: Up to 60 V PW: 1-60 F: 60 Hz EL: - |
Sample: n=12 (10 female) Age: MD = 27.4, SD = 3.8 Scope: Track the arm movement of a VR avatar while holding a virtual cube under three conditions: i) physical feedback, ii) EMS feedback, iii) visual feedback Measures: IMUs for angle measurement, force sensor for force measurement, 7-point Likert scale for pleasantness and naturalness |
NMES does not interfere with the range of motion, but affects the smoothness of the natural movement; NMES feedback was perceived as "slightly uncomfortable", but significantly more natural than only visual feedback |
*Rect.=Rectangular, mono.=monophasic, biph.=biphasic, rect.=rectangular, PW=Pulse width, PD=Pulse duration, I=current amplitude, F=Frequency, V=Voltage, EL=electrodes, - =not mentioned in the paper
References
- Speicher, M.; Hall, B.D.; Nebeling, M. What is Mixed Reality? CHI 2019. Assoc Comp Machinery, 2019. CHI Conference on Human Factors in Computing Systems, Glasgow, Scotland. [CrossRef]
- Ramsamy, P.; Haffegee, A.; Jamieson, R.; Alexandrov, V. Using Haptics to Improve Immersion in Virtual Environments. Computational Science – ICCS 2006; Springer Berlin Heidelberg: Berlin, Heidelberg, 2006; pp. 603–609.
- Oakley, I.; Brewster, S.; Gray, P. Can you feel the force? An investigation of haptic collaboration in shared editors. proceedings of EuroHaptics, 2001, Vol. 2001, pp. 54–59.
- Slater, M. Presence and The Sixth Sense. Presence 2002, 11, 435–439. [Google Scholar] [CrossRef]
- Insko, B.E. Passive Haptics Significantly Enhances Virtual Environments. PhD thesis, University of North Carolina, 2001.
- Slater, M.; Usoh, M.; Steed, A. Depth of Presence in Virtual Environments. Presence 1994, 3, 130–144. [Google Scholar] [CrossRef]
- Gibbs, J.; Gillies, M.; Pan, X. A Comparison of the Effects of Haptic and Visual Feedback on Presence in Virtual Reality. International Journal of Human-Computer Studies 2021, 157, 102717. [Google Scholar] [CrossRef]
- Sallnäs, E.L. Haptic Feedback Increases Perceived Social Presence. Haptics: Generating and Perceiving Tangible Sensations; Springer Berlin Heidelberg: Berlin, Heidelberg, 2010; pp. 178–185.
- Purves, D.; Augustine, G.J.; Fitzpatrick, D.; Hall, W.C.; LaMantia, A.S.; McNamara, J.O.; Williams, S.M. Neuroscience, 3rd ed.; Sinauer Associates: Sunderland, Massachusetts, 2004; pp. 192–193. [Google Scholar]
- Hannaford, B.; Okamura, A.M. Haptics. Springer Handbook of Robotics 2008. [CrossRef]
- Kaya, D.; Yosmaoglu, B.; Doral, M.N. Proprioception in orthopaedics, sports medicine and rehabilitation; Springer: Cham, Switzerland, 2018; pp. 3–4. [Google Scholar]
- Choi, I.; Hawkes, E.W.; Christensen, D.L.; Ploch, C.J.; Follmer, S. Wolverine: A wearable haptic interface for grasping in virtual reality. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 986–993. [CrossRef]
- Zhang, S.; Fu, Q.; Guo, S.; Fu, Y. Coordinative Motion-Based Bilateral Rehabilitation Training System with Exoskeleton and Haptic Devices for Biomedical Application. Micromachines 2019, 10. [Google Scholar] [CrossRef] [PubMed]
- Akahane, K.; Hyun, J.; Kumazawa, I.; Sato, M. Two-Handed Multi-finger String-Based Haptic Interface SPIDAR-8. In Multi-finger Haptic Interaction; Springer London: London, 2013; pp. 109–147. [Google Scholar] [CrossRef]
- Hoshi, T.; Takahashi, M.; Iwamoto, T.; Shinoda, H. Noncontact Tactile Display Based on Radiation Pressure of Airborne Ultrasound. IEEE T. Haptics 2010, 3, 155–165. [Google Scholar] [CrossRef] [PubMed]
- Raza, A.; Hassan, W.; Ogay, T.; Hwang, I.; Jeon, S. Perceptually correct haptic rendering in mid-air using ultrasound phased array. IEEE Transactions on Industrial Electronics 2020, 67, 739–745. [Google Scholar] [CrossRef]
- Fan, L.; Song, A.; Zhang, H. Development of an Integrated Haptic Sensor System for Multimodal Human-Computer Interaction Using Ultrasonic Array and Cable Robot. IEEE Sensors Journal 2022, 22, 4634–4643. [Google Scholar] [CrossRef]
- Kruijff, E.; Schmalstieg, D.; Beckhaus, S. Using Neuromuscular Electrical Stimulation for Pseudo-Haptic Feedback. Proceedings of the ACM Symposium on Virtual Reality Software and Technology; Association for Computing Machinery: New York, NY, USA, 2006; p. 316–319. [CrossRef]
- Yem, V.; Kajimoto, H. Comparative Evaluation of Tactile Sensation by Electrical and Mechanical Stimulation. Ieee Transactions on Haptics 2017, 10, 130–134. [Google Scholar] [CrossRef] [PubMed]
- Magalhães, P.; Figueirêdo, B.B.; Vasconcelos, A.; de Andrade, E.M.; Dornelas de Andrade, A.; Reinaux, C. Is transcutaneous electrical muscle stimulation an alternative for preventing acquired muscle weakness in the pediatric intensive care unit? A scoping review. Pediatric Pulmonology 2019, 54, 1108–1116. [Google Scholar] [CrossRef]
- Šarabon, N.; Kozinc, Z.; Löfler, S.; Hofer, C. Resistance Exercise, Electrical Muscle Stimulation, and Whole-Body Vibration in Older Adults: Systematic Review and Meta-Analysis of Randomized Controlled Trials. Journal of Clinical Medicine 2020, 9. [Google Scholar] [CrossRef] [PubMed]
- Doucet, B.; Lam, A.; Griffin, L. Neuromuscular Electrical Stimulation for Skeletal Muscle Function. The Yale journal of biology and medicine 2012, 85, 201–215. [Google Scholar] [PubMed]
- Behringer, M.; Grützner, S.; Montag, J.; McCourt, M.; Ring, M.; Mester, J. Effects of stimulation frequency, amplitude, and impulse width on muscle fatigue. Muscle & Nerve 2016, 53, 608–616. [Google Scholar] [CrossRef]
- Lopes, P.; You, S.J.; Ion, A.; Baudisch, P.; Acm. Adding Force Feedback to Mixed Reality Experiences and Games using Electrical Muscle Stimulation. Proceedings of the 2018 Chi Conference on Human Factors in Computing Systems (Chi 2018) 2018, p. 13. [CrossRef]
- Pfeiffer, M.; Kroger, T.; Seifert, J.; Somaskantharajan, S.; Jahnich, L.; Steinblum, T.; Speckamp, J.; Medrano, S.N.; Assoc Comp, M. WONDER - Enhancing VR Training With Electrical Muscle Stimulation. Chi Ea ’19 Extended Abstracts: Extended Abstracts of the 2019 Chi Conference on Human Factors in Computing Systems 2019, p. 6. [CrossRef]
- Lopes, P.; Baudisch, P. Muscle-Propelled Force Feedback: Bringing Force Feedback to Mobile Devices. Proceedings of the SIGCHI Conference on Human Factors in Computing Systems; Association for Computing Machinery: New York, NY, USA, 2013. [CrossRef]
- Khamis, M.; Schuster, N.; George, C.; Pfeiffer, M. ElectroCutscenes: Realistic Haptic Feedback in Cutscenes of Virtual Reality Games Using Electric Muscle Stimulation. 25th ACM Symposium on Virtual Reality Software and Technology; Assoc Computing Machinery: NEW YORK, 2019. [CrossRef]
- Lee, J.; Kim, Y.; Jung, H. Electrically Elicited Force Response Characteristics of Forearm Extensor Muscles for Electrical Muscle Stimulation-Based Haptic Rendering. Sensors 2020, 20, 21. [Google Scholar] [CrossRef] [PubMed]
- Lopes, P.; You, S.; Cheng, L.P.; Marwecki, S.; Baudisch, P.; Acm. Providing Haptics to Walls & Heavy Objects in Virtual Reality by Means of Electrical Muscle Stimulation. ACM SIGCHI Conference on Human Factors in Computing Systems (CHI); Assoc Computing Machinery: New York, 2017; pp. 1471–1482. [CrossRef]
- Harris, M.; McCarty, M.; Montes, A.; Celik, O.; Asme. Enhancing haptic effects displayed via neuromuscular electrical stimulation. Proceedings of the Asme 9th Annual Dynamic Systems and Control Conference, 2016, Vol 1 2017, p. 8.
- Kurita, Y.; Ishikawa, T.; Tsuji, T. Stiffness Display by Muscle Contraction Via Electric Muscle Stimulation. Ieee Robotics and Automation Letters 2016, 1, 1014–1019. [Google Scholar] [CrossRef]
- Faltaous, S.; Prochazka, M.; Auda, J.; Keppel, J.; Wittig, N.; Gruenefeld, U.; Schneegass, S. Give Weight to VR: Manipulating Users’ Perception of Weight in Virtual Reality with Electric Muscle Stimulation. Proceedings of Mensch Und Computer 2022; Association for Computing Machinery: New York, NY, USA, 2022; MuC ’22, p. 533–538. [CrossRef]
- Galofaro, E.; D’Antonio, E.; Lotti, N.; Masia, L. Rendering immersive haptic force feedback via neuromuscular electrical stimulation. Sensors 2022, 22, 5069. [Google Scholar] [CrossRef] [PubMed]
- Ishimaru, T.; Saga, S.; Ieee. Virtual bumps display based on electrical muscle stimulation. IEEE Haptics Symposium (HAPTICS); Ieee: New York, 2020; IEEE Haptics Symposium, pp. 96–101.
- Lopes, P.; Ion, A.; Mueller, W.; Hoffmann, D.; Jonell, P.; Baudisch, P.; Assoc Comp, M. Proprioceptive Interaction. Chi 2015: Proceedings of the 33rd Annual Chi Conference on Human Factors in Computing Systems2015, pp. 939–948. [CrossRef]
- Lopes, P.; Jonell, P.; Baudisch, P.; Assoc Comp, M. Affordance plus plus : allowing objects to communicate dynamic use. Chi 2015: Proceedings of the 33rd Annual Chi Conference on Human Factors in Computing Systems2015, pp. 2515–2524. [CrossRef]
- Ebisu, A.; Hashizume, S.; Suzuki, K.; Ishii, A.; Sakashita, M.; Ochiai, Y. Stimulated Percussions: Method to Control Human for Learning Music by Using Electrical Muscle Stimulation. Proceedings of the 8th Augmented Human International Conference; Association for Computing Machinery: New York, NY, USA, 2017; AH ’17. [CrossRef]
- Farbiz, F.; Yu, Z.H.; Manders, C.; Ahmad, W. An Electrical Muscle Stimulation Haptic Feedback for Mixed Reality Tennis Game. ACM SIGGRAPH 2007 Posters; Association for Computing Machinery: New York, NY, USA, 2007. [CrossRef]
- Pfeiffer, M.; Schneegaß, S.; Alt, F. Supporting Interaction in Public Space with Electrical Muscle Stimulation. Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication; Association for Computing Machinery: New York, NY, USA, 2013; p. 5–8 [CrossRef]
- Korres, G.; Park, W.; Eid, M. A Comparison of Vibrotactile Feedback and Electrical Muscle Stimulation (EMS) for Motor Response During Active Hand Movement. IEEE Transactions on Haptics 2022, 15, 74–78. [Google Scholar] [CrossRef] [PubMed]
- Pfeiffer, M.; Duente, T.; Rohs, M. Let Your Body Move: A Prototyping Toolkit for Wearable Force Feedback with Electrical Muscle Stimulation. Proceedings of the 18th International Conference on Human-Computer Interaction with Mobile Devices and Services; Association for Computing Machinery: New York, NY, USA, 2016; MobileHCI ’16, p. 418–427. [CrossRef]
- TeslaSuit. https://teslasuit.io/products/teslasuit-4/, 2023. Accessed: 2023-08-07.
- Tamaki, E.; Chan, T.; Iwasaki, K. UnlimitedHand: Input and output hand gestures with less calibration time. Adjunct Proceedings of the 29th Annual ACM Symposium on User Interface Software and Technology, 2016, pp. 163–165.
- Hosono, S.; Miyake, T.; Miyake, S.; Tamaki, E. Feedback Method of Force Controlled by Electrical Muscle Stimulation Based on Infrared Optical Sensing. Frontiers in Virtual Reality 2022, 3. [Google Scholar] [CrossRef]
Figure 1.
A USB-controlled EMS system, P24 Science from HASOMED© in Germany, is depicted here connected to the forearm and biceps muscles. The system is capable of stimulating up to 8 target muscles simultaneously and the stimulation parameters can be chosen through an external PC.
Figure 1.
A USB-controlled EMS system, P24 Science from HASOMED© in Germany, is depicted here connected to the forearm and biceps muscles. The system is capable of stimulating up to 8 target muscles simultaneously and the stimulation parameters can be chosen through an external PC.
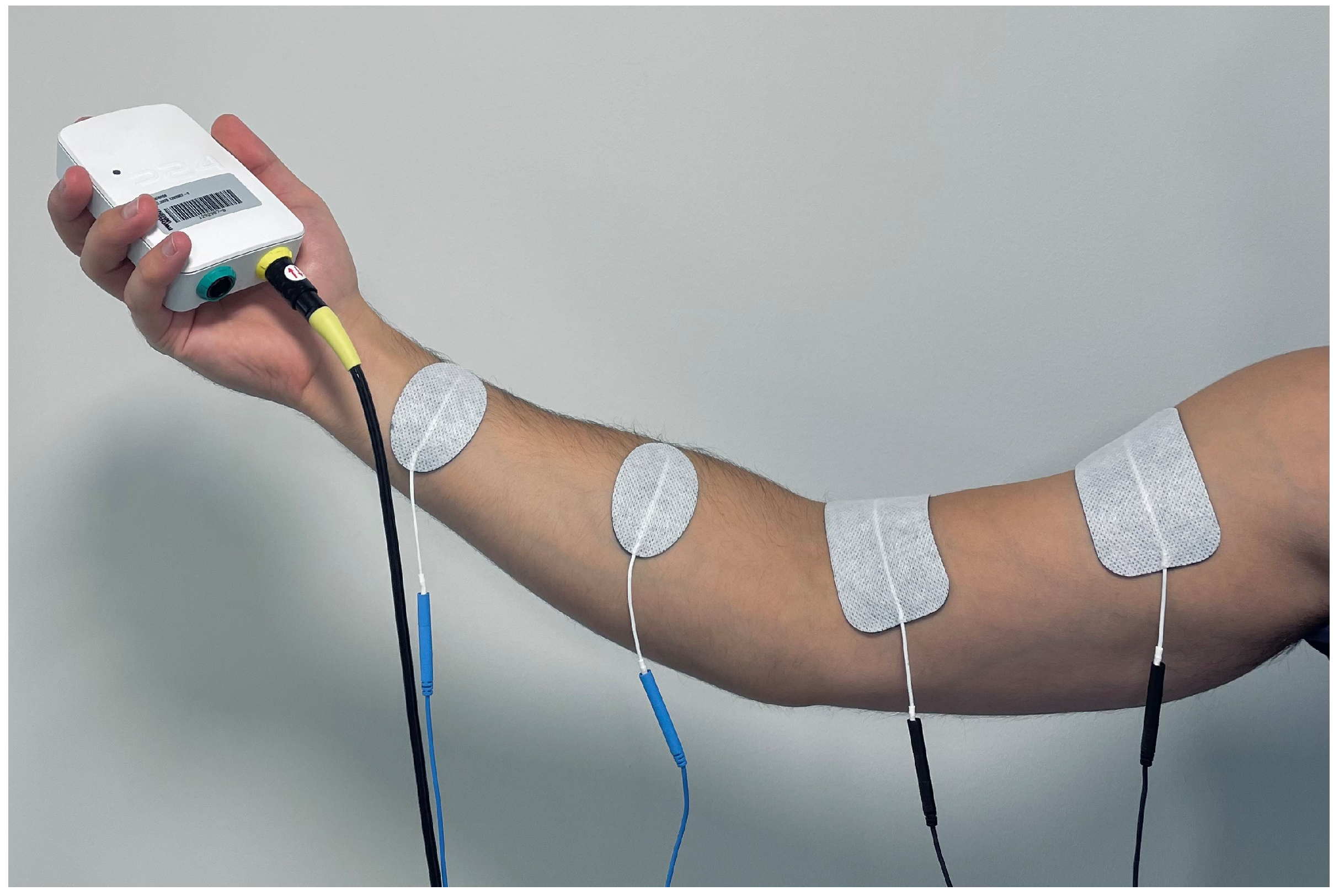
Figure 2.
Comparison of two common stimulation pulse forms: biphasic rectangular and monophasic rectangular. Illustrated are the key parameters that define each pulse.
Figure 2.
Comparison of two common stimulation pulse forms: biphasic rectangular and monophasic rectangular. Illustrated are the key parameters that define each pulse.
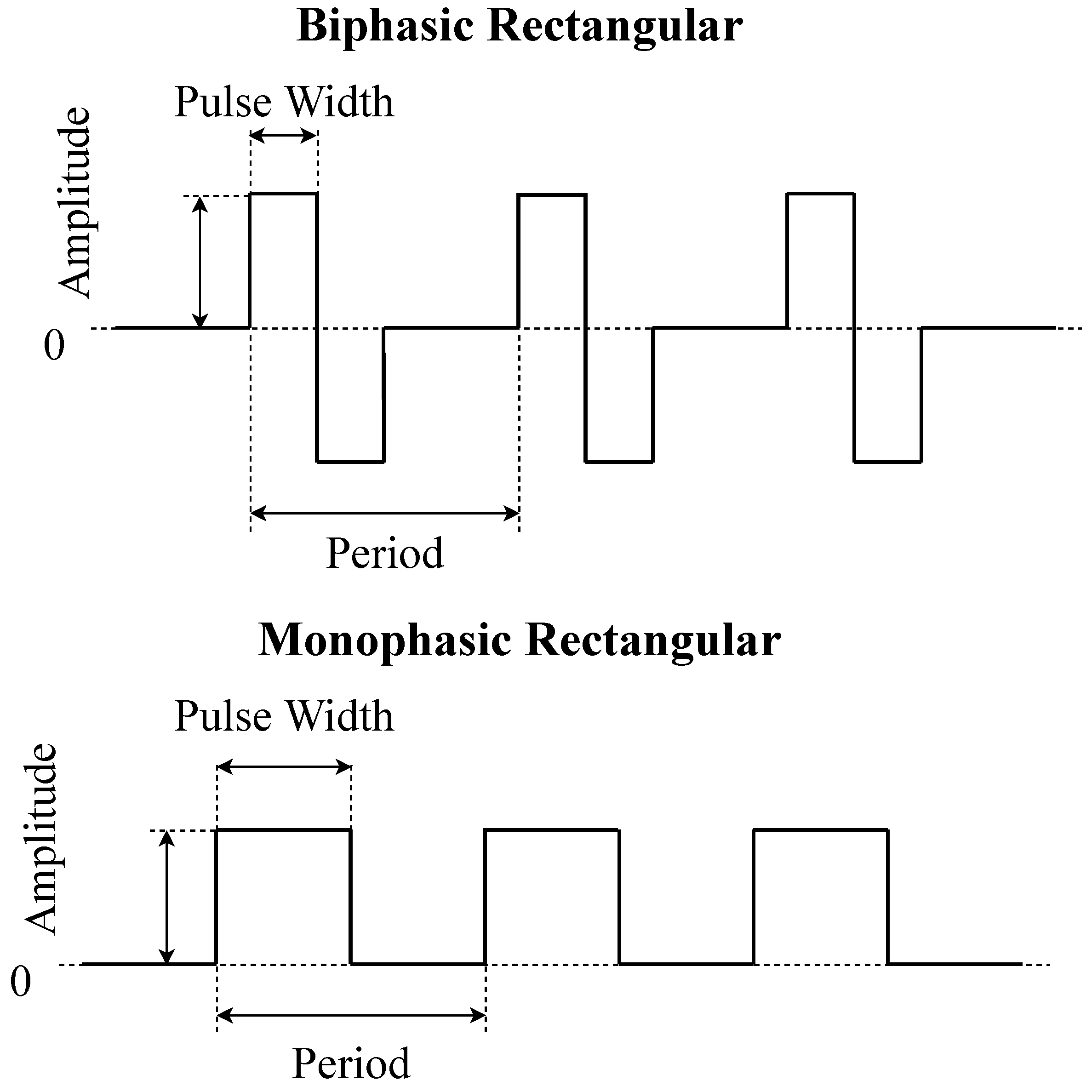
Figure 3.
PRISMA flowchart of the literature review.
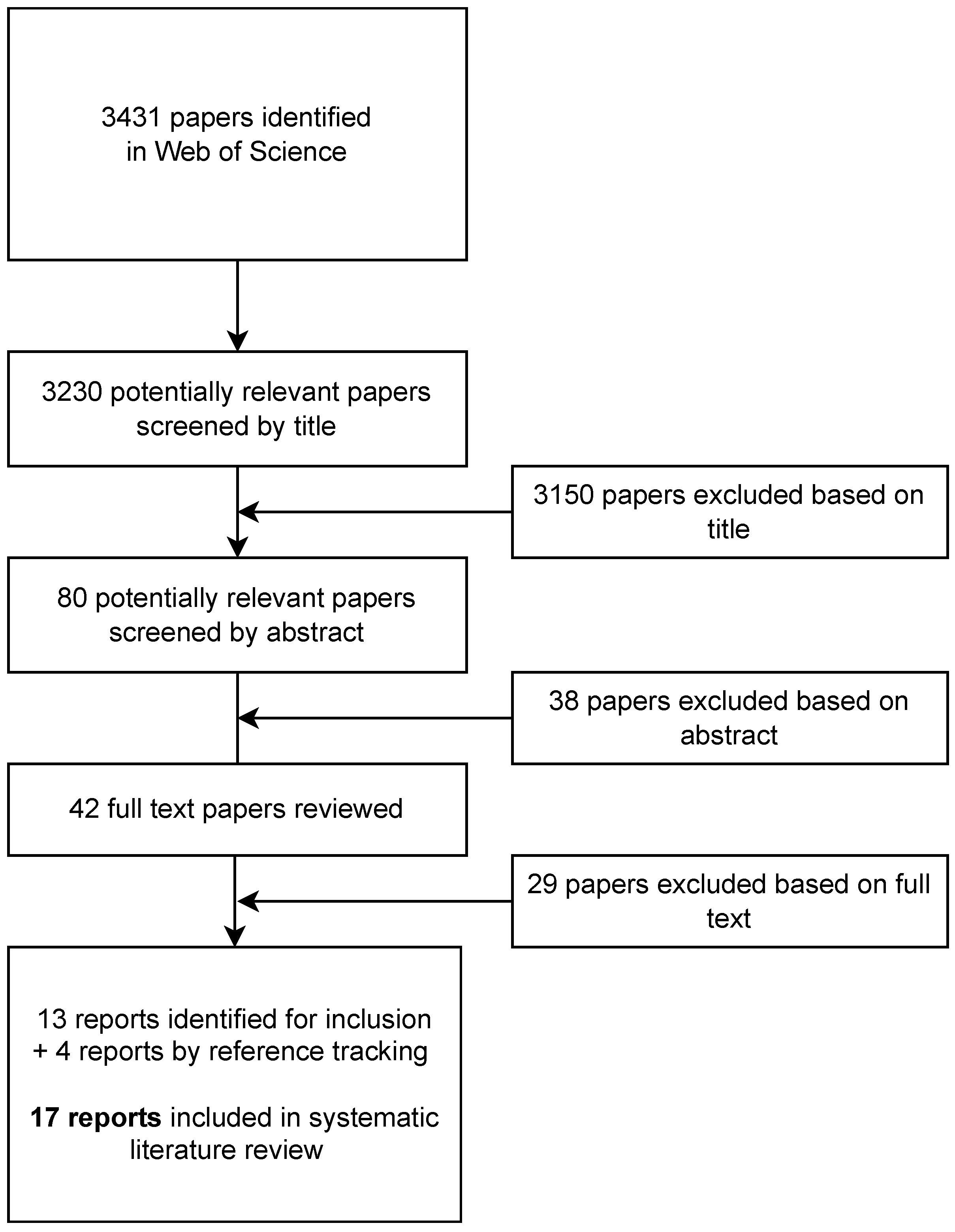
Figure 4.
Sample sizes and gender distribution.
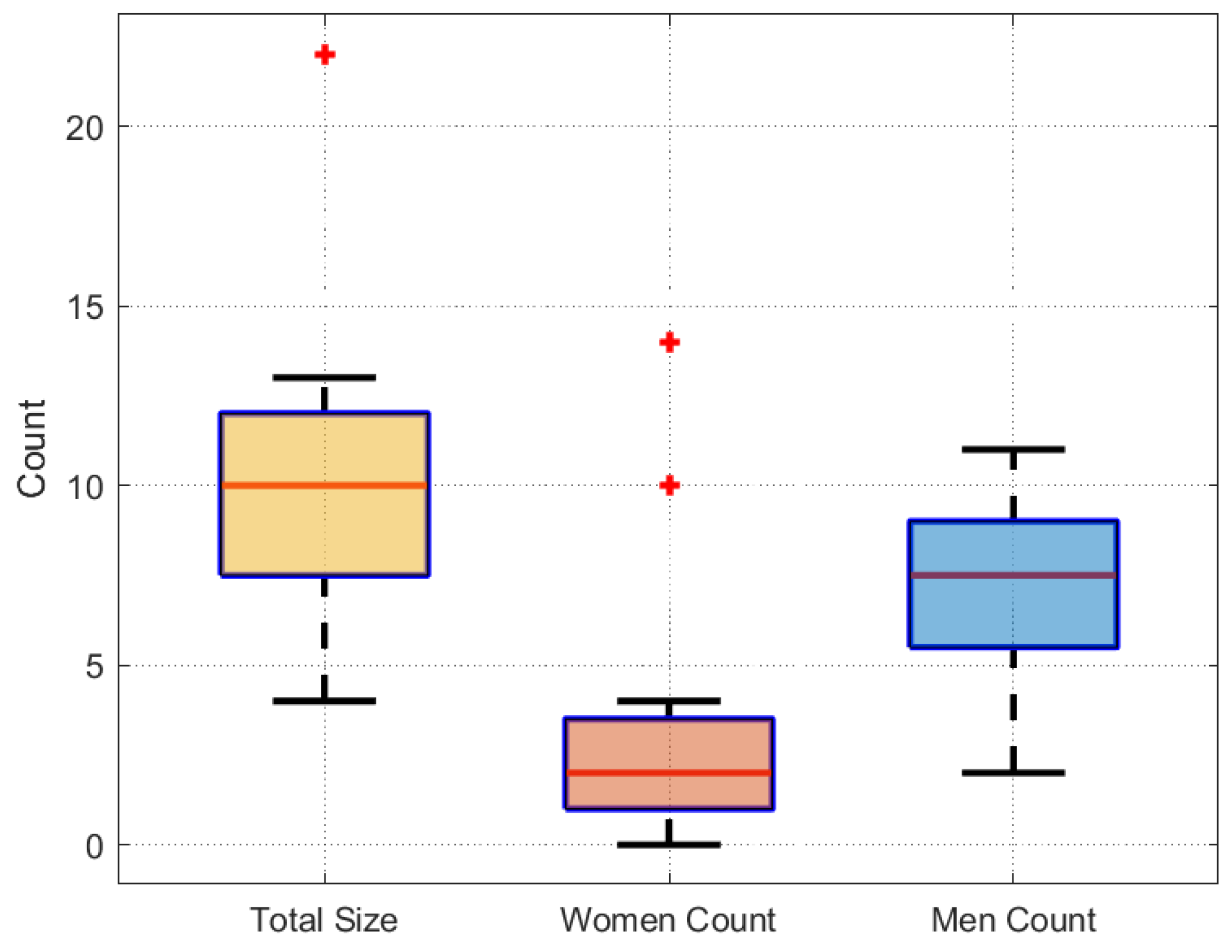
Figure 5.
Approximated age distribution of all participants.
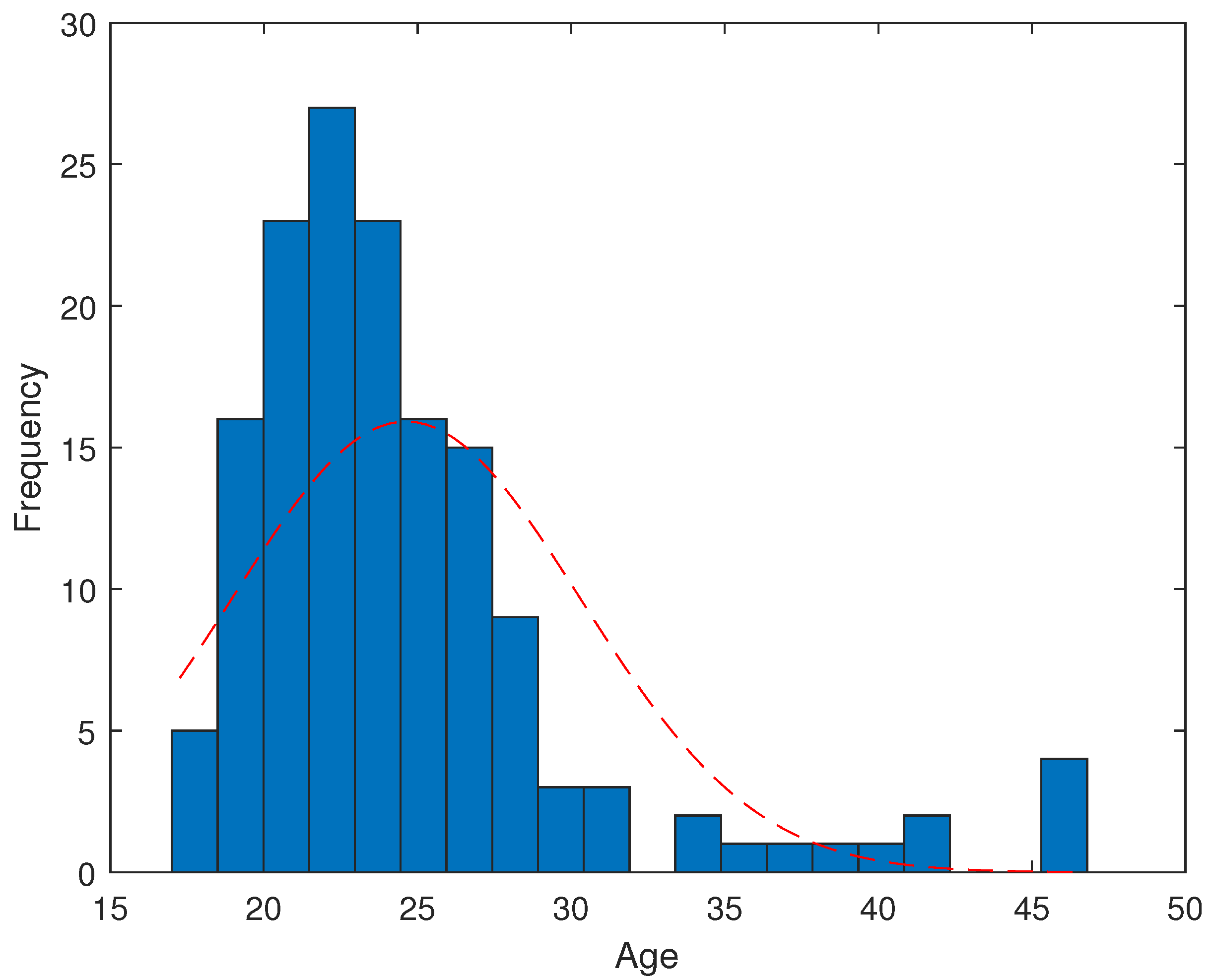
Figure 6.
Total citations over time.
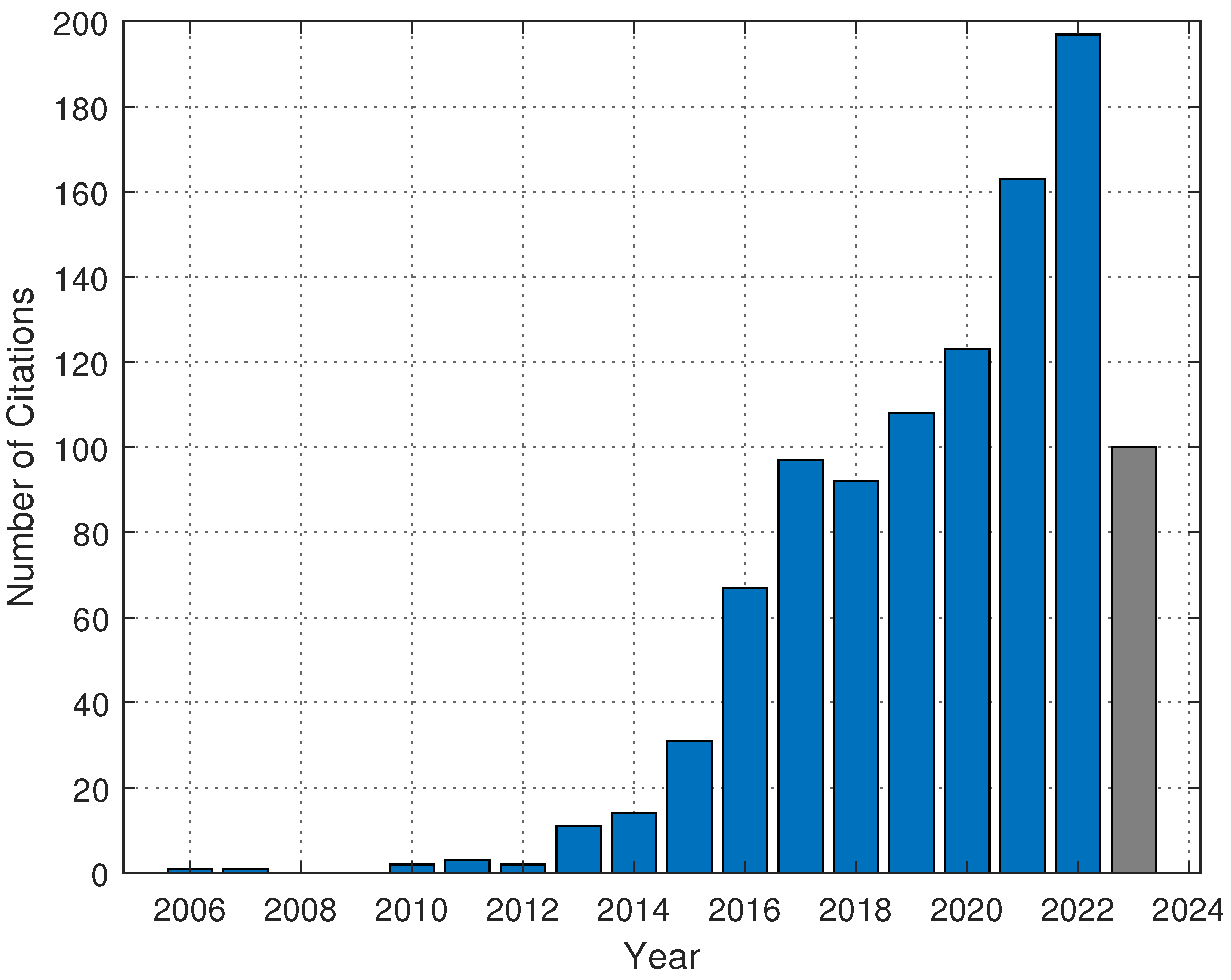
Table 1.
Stimulation parameters used in the identified literature
| Pulse Form | References |
|---|---|
| Biphasic | [18,26,28,30,35] |
| Monophasic Rectangular | [31] |
| Pulse Amplitude | References |
| 10 mA to 27 mA | [18,24,29] |
| Limited to 80 mA | [30] |
| Limited to 100 mA | [35,36] |
| Limited to 150 mA | [33] |
| Pulse Width | References |
| 25 to 45 | [30] |
| Up to 60 | [33] |
| 70 to 200 | [29] |
| 100 | [27] |
| 100 to 420 | [24] |
| 150 | [35] |
| 150 to 250 | [36] |
| 260 | [39] |
| 290 | [26] |
| Up to 300 | [30] |
| 400 | [28,31] |
| 500 | [34] |
| 800 | [37] |
| Pulse Frequency | References |
| 3 Hz to 5 Hz | [18] |
| 20 Hz to 40 Hz | [28] |
| 25 Hz | [26] |
| 50 Hz | [31] |
| 50 Hz to 70 Hz | [37,39] |
| 60 Hz | [33,34] |
| 80 Hz to 140 Hz | [36] |
| 100 Hz | [27] |
| 120 Hz | [35] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



