
Submitted:
25 December 2023
Posted:
26 December 2023
You are already at the latest version
Abstract
As most of the current dynamic positioning systems are based on model ships, they cannot accu-rately reflect the motion state, position changes, and mutual influence of each part of the dynamic positioning system of actual ships in complex environments. Other actual ships such as cargo ships cannot add various sensors and auxiliary equipment to verify and analyze the positioning system. This article takes the intelligent research and training dual-use ship of Dalian Maritime University, which integrates scientific research and training, as the object of study. This ship will not be affected by the voyage period and route and can choose a suitable sea area for research. Therefore, in order to improve the accuracy and reliability of the dynamic positioning system, research on the ship’s dynamic positioning system was carried out. Firstly, an accurate mathematical model of ship motion was established, and the hydrodynamic derivatives of ship model motion were obtained by nu-merical calculation, and applied to the three-degree-of-freedom model of the intelligent research and training dual-use ship. Then, the model was used as part of the closed-loop simulation model of the ship’s dynamic positioning system, and the terminal sliding mode controller was used for sim-ulation and emulation, thereby obtaining ideal simulation test results. This research helps to im-prove the accuracy and reliability of the dynamic positioning system and provides new ideas and methods for ship motion control.
Keywords:
ship power positioning
; hydrodynamic derivatives
; intelligent research and practical training dual-use vessels
; mathematical modelling of ship motion
; simulation
; terminal sliding mode
1. Introduction
Based on the development trend of intelligent ships and the cultivation demand of shipping talents, Dalian Maritime University has built an intelligent research and training dual-purpose ship integrating scientific research and practical training. The intelligent research and training dual-purpose ship carries the scientific research and innovative practical teaching tasks of the intelligent ships and provides a research platform for the disciplines of traffic information engineering and control, ship and ocean engineering, electrical engineering, information and communication engineering, control science and engineering. The research platform is mainly used to overcome the problems of marine scientific research and shipping science and technology, to serve the construction of "double first-class", to actively build a research base for high-tech ships in the era of artificial intelligence, and to provide strong scientific and technological support for the construction of a strong maritime nation and cultivate high-quality shipping talents. When the ship is operating at sea, the wind, waves and currents on the sea surface have a great influence on the interference load generated by the ship, in order to better achieve the intelligent research and training dual-purpose ship "ship intelligent research + student teaching and training" function, the reliability of the ship, control accuracy has higher requirements. In this paper, on the basis of the previous research on ship power positioning, we take the "intelligent research and training dual-use ship" as the research object, calculate the hydrodynamic derivatives, calculate the M inertia coefficient matrix and D is the damping coefficient matrix, derive the ship's three degrees of freedom model, and bring the model to the linear sliding mode and the terminal sliding mode controller for simulation.
"Dynamic positioning system (DPS) is a technology that uses ship propellers and control systems to keep ships in a fixed position or on a predetermined course at sea1. DPS has a wide range of applications in ocean engineering, offshore operations, and maritime rescue2. However, the current DPS still has some problems, such as low control accuracy, high energy consumption, and sensitivity to environmental interference3. In order to solve these problems and improve the performance and reliability of DPS, more in-depth theoretical research and experimental verification are needed. Taking the intelligent research and training dual-use ship of Dalian Maritime University as the object of study, research on ship DPS control was carried out. On the one hand, it can promote the innovation and development of intelligent ship technology, explore and verify more efficient, stable, and energy-saving DPS control algorithms, improve the control accuracy and adaptability of DPS, reduce the energy consumption and environmental impact of DPS, and provide theoretical support and experimental basis for the innovation and development of intelligent ship technology. On the other hand, it can enhance the ability and level of ship intelligent research and experimentation, build a ship intelligent research and experimentation verification platform, conduct research on intelligent navigation technology and system, ship remote monitoring and shore-based support, ship intelligent communication technology, ship intelligent operation and maintenance technology, and other aspects, carry out collaborative research with other intelligent ships, explore the collective behavior and collaborative control of intelligent ships, and enhance China’s international influence and competitiveness in the field of intelligent ships. In addition, it can also cultivate high-level talents in the field of intelligent ships, be used to train intelligent shipping talents, serve students’ cognitive learning, practical training, and intelligent training, enable students to come into contact with the most advanced intelligent ship equipment and systems, master the basic principles and operation methods of intelligent ships, and cultivate students’ innovative thinking and practical ability, and cultivate professional talents for the application and development of DPS. Secondly, research on actual ships has many advantages over research on model ships. Actual ship tests can more realistically simulate the motion and control of ships in the marine environment, without being limited by factors such as the size, material, and proportion of model ships. These factors affect the hydrodynamic similarity between model ships and actual ships, resulting in model ship test results that need to be corrected and converted for application to actual ships. Actual ship tests can also verify and optimize the results of model ship tests, improve the reliability and performance of ship dynamic positioning systems. The ship dynamic positioning system is a system that controls power to maintain the position and heading of the ship, and it plays an important role in ship control. Actual ship tests can also examine the adaptability and safety of ships in complex natural environments, as well as the structural strength and durability of ships. Ship performance can be fully tested at full scale under real working conditions, avoiding the differences and uncertainties between model ship test results and actual ship data, and improving the accuracy and credibility of predictions1. Model ship testing is a commonly used method for evaluating ship performance, but it has some limitations, such as scale effects, Reynolds number effects, and viscosity effects, which result in some deviation between model ship test results and actual ship data. Therefore, research on actual ships can more realistically reflect the motion state and position changes of ships, external environmental interference, and the interaction and influence of various components of the dynamic positioning system, thereby improving the accuracy and reliability of the dynamic positioning system. Compared with other actual ships, the cargo ship of Dalian Maritime University is used for commercial purposes and cannot add various sensors and auxiliary equipment to verify and analyze the positioning system. This ship will not be affected by the voyage period and route and can choose a suitable sea area for research.
2. Intelligent Research And Practical Training Dual-Use Vessel Of Dalian Maritime University
Dalian Maritime University Intelligent Research and Training Ship is a dual-purpose ship with the function of "intelligent ship research + students' teaching and training". It is a dual-purpose ship that is focused on the national strategic needs, leading the integration of cutting-edge technology of intelligent ships, systematic testing and experimental research of related equipments, as well as the training of talents in the new industry of intelligent shipping. Each time, it can arrange 30 students for practical training and 5 researchers for scientific research test, plus the number of crew members (15) to ensure the normal operation of the ship, which belongs to the special-purpose ship. This ship not only meets the needs of teaching and practical training, but also has the more important function of becoming an open research platform to study ship intelligence and then realise unmanned ship. Through the operation practice of teaching and students' practical training carried out in the real environment at sea, the degree of intelligence, reliability and stability of intelligent systems, equipments and technologies such as intelligent system architecture, intelligent technology and equipment, intelligent integration platform, etc. are examined and verified. The ship has good wind resistance, rapidity and endurance, flexible manoeuvrability, and is capable of carrying out normal teaching, practical training and scientific research work under Class IV sea state, and safe navigation under Class VI sea state. The ship is an independently designed and constructed dual-use ship for intelligent research and practical training, with a design navigation area of unlimited navigation area, an overall length of 69.83 metres, a beam of 10.9 metres, a depth of 5.0 metres and a design draught of 3.5 metres; a design speed of 18 knots, an endurance of about 2,500 nautical miles, and a self-sustaining power of 6 days. The ship can accommodate 15 crew members and 30 students. Considering the needs of scientific research, 3 cabins are set up for scientific researchers to use, and there are 5 long-term scientific researchers on board.
Dalian Maritime University Intelligent Research and Training Ship function is "ship intelligent research + student teaching and training", is around the national strategic needs, the formation of leading intelligent ship cutting-edge technology, related equipment and system testing and experimental research, as well as intelligent shipping under the new mode of talent training integration of intelligent research and training ship. Each time, it can arrange 30 students for practical training and 5 researchers for scientific research test, plus the number of crew members (15) to ensure the normal operation of the ship, which belongs to the special-purpose ship. This ship not only meets the needs of teaching and practical training, but also has the more important function of becoming an open research platform to study ship intelligence and then realise unmanned ship. Through the operation practice of teaching and students' practical training carried out in the real environment at sea, the degree of intelligence, reliability and stability of intelligent systems, equipments and technologies such as intelligent system architecture, intelligent technology and equipment, intelligent integration platform, etc. are examined and verified. The ship has good wind resistance, rapidity and endurance, flexible manoeuvrability, and is capable of carrying out normal teaching, practical training and scientific research work under Class IV sea state, and safe navigation under Class VI sea state. The ship is an independently designed and constructed dual-use ship for intelligent research and practical training, with a design navigation area of unlimited navigation area, an overall length of 69.83 metres, a beam of 10.9 metres, a depth of 5.0 metres and a design draught of 3.5 metres; a design speed of 18 knots, an endurance of about 2,500 nautical miles, and a self-sustaining power of 6 days. The ship can accommodate 15 crew members and 30 students. Considering the needs of scientific research, 3 cabins are set up for the use of scientific researchers, and there are 5 long-term scientific researchers on board.
Figure 1.
Intelligent research and practical training dual-use vessel of Dalian Maritime University.
Figure 1.
Intelligent research and practical training dual-use vessel of Dalian Maritime University.

3. Mathematical modelling of ship power positioning systems
3.1. Establishment of A Coordinate System
3.2. Build A Mathematical Model of The Ship's Motion
The ship power positioning system, which is mainly studied in this paper, focuses on the positioning control of the ship on the sea surface, so the effects of vertical oscillation, transverse motions and longitudinal rocking are neglected, and only the three degrees of freedom of longitudinal oscillation, transverse oscillation and bow rocking are considered. The ship's motion in the horizontal plane is superimposed by the ship's low-frequency and the ship's high-frequency motion. The low-frequency motion affects the real position change of the ship, which is the main research object. The simplified three-degree-of-freedom ship low-frequency motion model is obtained [12]:
where M is the mass matrix and D is the damping matrix, is the hydrodynamic derivative, m is the mass of the ship, 𝐼𝑧 is the rotational moment of inertia of the ship, 𝜏 is the total thrust of the propellers; 𝑑 is the ambient force of the ocean Due to the extremely complex and irregular geometry of the attached ship including oars and rudders it is unlikely that the hydrodynamic theoretical method can be used to carry out the computation of this series of hydrodynamic conductors, and most of the cases are used in the experimental ship modelling, and the formulae used for the estimation of the hydrodynamic conductors of the linear fluid are adopted here, and the experimental data of the ship modelling, which was sorted out by Clarke, is as shown below [7]:
Where: L is the hull waterline length, is the average draft depth; B is the ship's breadth, C is the hull squareness coefficient.
3.3. The main parameters of the ship
The research object chosen in this paper is the intelligent research and training dual-use ship of Dalian Maritime University, and the simulation model is built in simulink, and its main parameters are shown in Table 1:
The mass matrix and damping matrix of the intelligent research and practical training dual-use vessel of Dalian Maritime University, the object of the study, are respectively:
3.4. Mathematical models of environmental disturbances
When a ship is travelling and operating at sea, it is often affected by external environmental factors, mainly from the disturbance of wind, waves and currents. These disturbances will change the ship's position and bow direction, so the calculation and study of wind, wave and current disturbances are indispensable in the study of ship's dynamic positioning. In this paper, mathematical modelling of wind, waves and currents will be carried out.
3.4.1. Wind disturbance model
Let the absolute wind speed be , the absolute wind angle be , the relative wind speed be , the relative wind angle be , V is the ship's speed, and are the components of the relative wind speed in the kinematic coordinate system, is the bow angle, and is the drift angle, and the relationship between the relative wind and the wind pressure and moments can be expressed as [8]:
It can also be expressed as:
After the calculation, we get:
Wind disturbance dynamics are expressed as for the sum of average wind speed and gusts:
where the average wind and moment are expressed as:
In the formula,、、 are wind force (moment) coefficients, is air density (kg/m3), is the side projected area of the ship subjected to the wind (), is the side projected area of the ship subjected to the wind (), L is the total length of the ship (m)and is the relative wind speed (kn).
3.4.2. Wave perturbation model
Most of the analyses of wave motion are analyzed using the wave energy spectrum formula, which is used in this paper [8]:
Calculation of wave disturbance force and torque:
Where is the average wave amplitude, is the wavelength, and are the coefficients of wave force (moment) along the x and y directions and around the z axis.The wave force (moment) coefficient is calculated as follows:
3.4.3. Flow perturbation model
The components of the flow velocity in the x and y axes in the kinematic coordinate system are and ,and can be expressed as:
is the magnitude of the flow velocity in a fixed coordinate system, is the direction of ocean currents.
The forces and moments of the currents are expressed as [8]:
Where:、 are the coefficients of current forc; is the coefficient of current moment; is the length of the ship; 、 are the lateral and frontal projected areas of the ship under the waterline; is the drift angle; 、 are the longitudinal and transversal oscillatory forces; is the bow-rocking moment; is the current velocity; is the density of seawater.
4. Experiments and Discussions
4.1. Sliding Form Controller For Ship Dynamic Positioning System
Dynamic Positioning System is a closed-loop control system, using various types of sensors to measure the ship's motion status and position changes, as well as the size and direction of the external wind, waves, currents and other disturbing forces, the control system controls the ship's thrust device to generate the appropriate thrust and torque, in order to offset the disturbing forces, so that the ship as far as possible to maintain the target position and the port direction. The control system is the core of DPS, the traditional control method of ship power positioning system does not meet the present ship positioning accuracy, this paper adopts the power positioning linear and terminal sliding mode controller designed based on the sliding film control control theory, as well as the combination of Kalman filter and terminal sliding mode controller to carry out the simulation by bringing in the motion model of the dual-purpose ship of Dalian Maritime University Intelligent Research and Practical Training.
4.1.1. Sliding Form Controller
Sliding Mode Control (SMC) is a control theory based on modern control theory, the main mathematical core of which is the Lyapunov function. The core idea of sliding mode control is to establish a sliding mode surface and pull the controlled system to the sliding mode surface so that the system moves along the sliding mode surface. One of the advantages of sliding mode control is that it disregards external perturbations and uncertain parameters, and uses a more "violent" approach to control. The essence of sliding mode control is to design the sliding mode surface through systematic errors so that the system can reach the steady state quickly and the robustness of the system can be greatly improved through the adjustment of the switching function.
4.1.2. Terminal Sliding Mode Control Design For Dynamic Positioning Of Dual-Purpose Ship For Intelligent Research And Training
The mathematical model of the ship with three degrees of freedom derived from the previous is:
Let the error of the system is , The speed error is , get:
Combined with the three-degree-of-freedom mathematical model, it is obtained:
Define the end die face:
Deriving gives:
 When = 0, the equivalence is:
When = 0, the equivalence is:
The switching control law is:
Therefore, the synovial control law of the dynamic positioning terminal of the ship is obtained:
Based on this control law, the controller model is designed as follows [1]:
4.1.3. Simulation of Terminal Slip Film Controller For Power Positioning Of Intelligent Research And Training Dual Purpose Vessels
The three-degree-of-freedom model of the dual-use ship for intelligent research and training at Dalian Maritime University is combined with the terminal sliding film controller to build the following ship power positioning terminal sliding mode control system:
Figure 4.
Imulation model of sliding membrane control system of ship dynamic positioning terminal

The dual-purpose ship of intelligent research and training of Dalian Maritime University was used as the simulation object to carry out the simulation. The initial position of the ship set to [ 0m, 0m, 0°],Desired position set to [ 80m, 20m, 10°]. The parameter settings of the controller are: . The simulation time is 600s.
Figure 5.
Curves of ship speed.
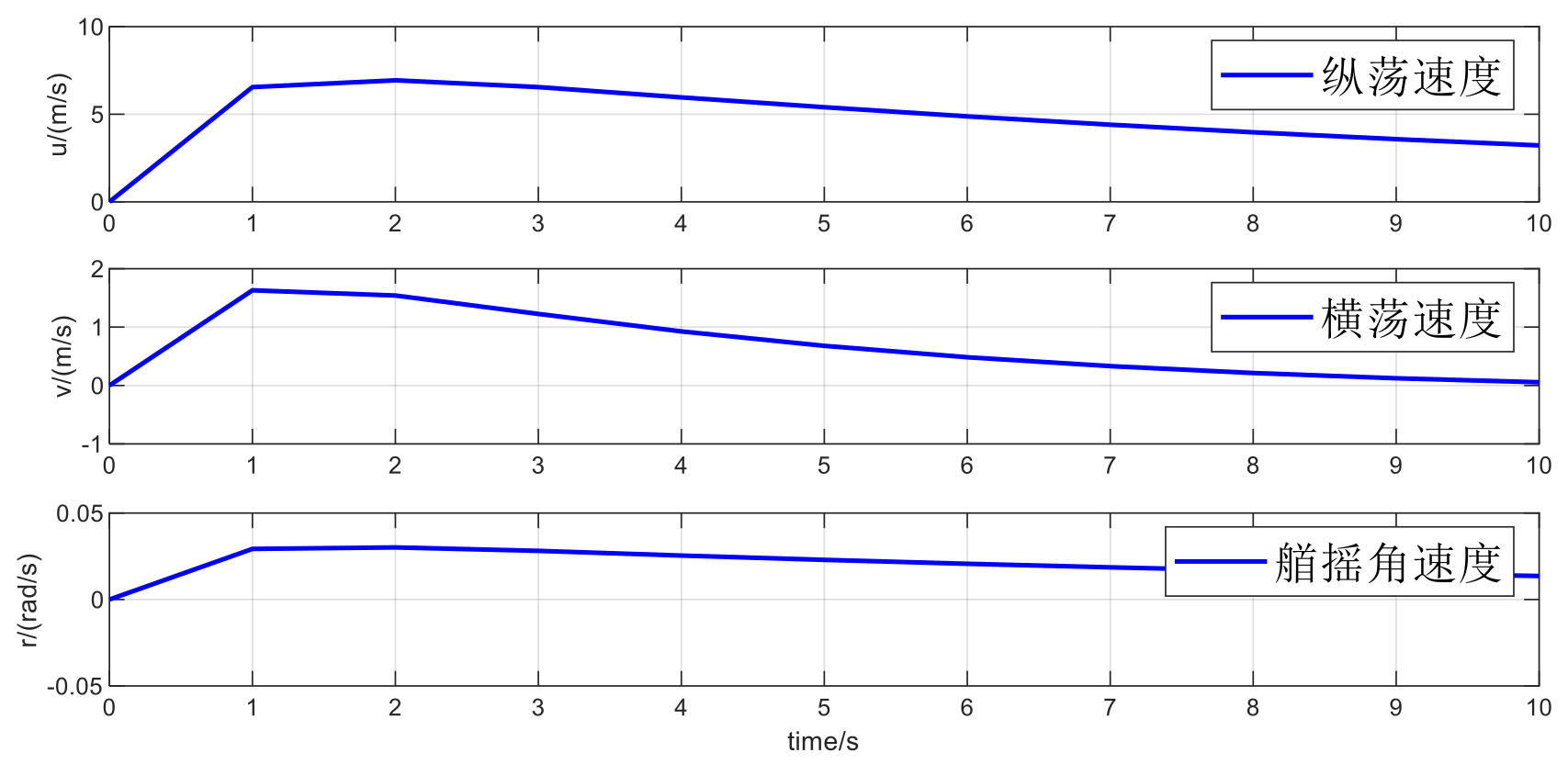
From Figure 6, it can be seen that the speed of the ship gradually increases from 0 and then gradually decreases, indicating that the speed control of controlled positioning is ideal. From Figure 7, it can be seen that the ship's position reaches the desired position from the initial position after a period of time under the control of the terminal sliding film controller, and the process of controlled positioning is precise, smooth and fast. From Figure 8, it can be obtained that the control force emitted by the ship's control system is ideal and continuous and bounded. The simulation results of the three figures show the ideality and feasibility of the terminal slip film controller.
Figure 6.
Ship position and heading angle.

Figure 7.
Curves of ship control forces.
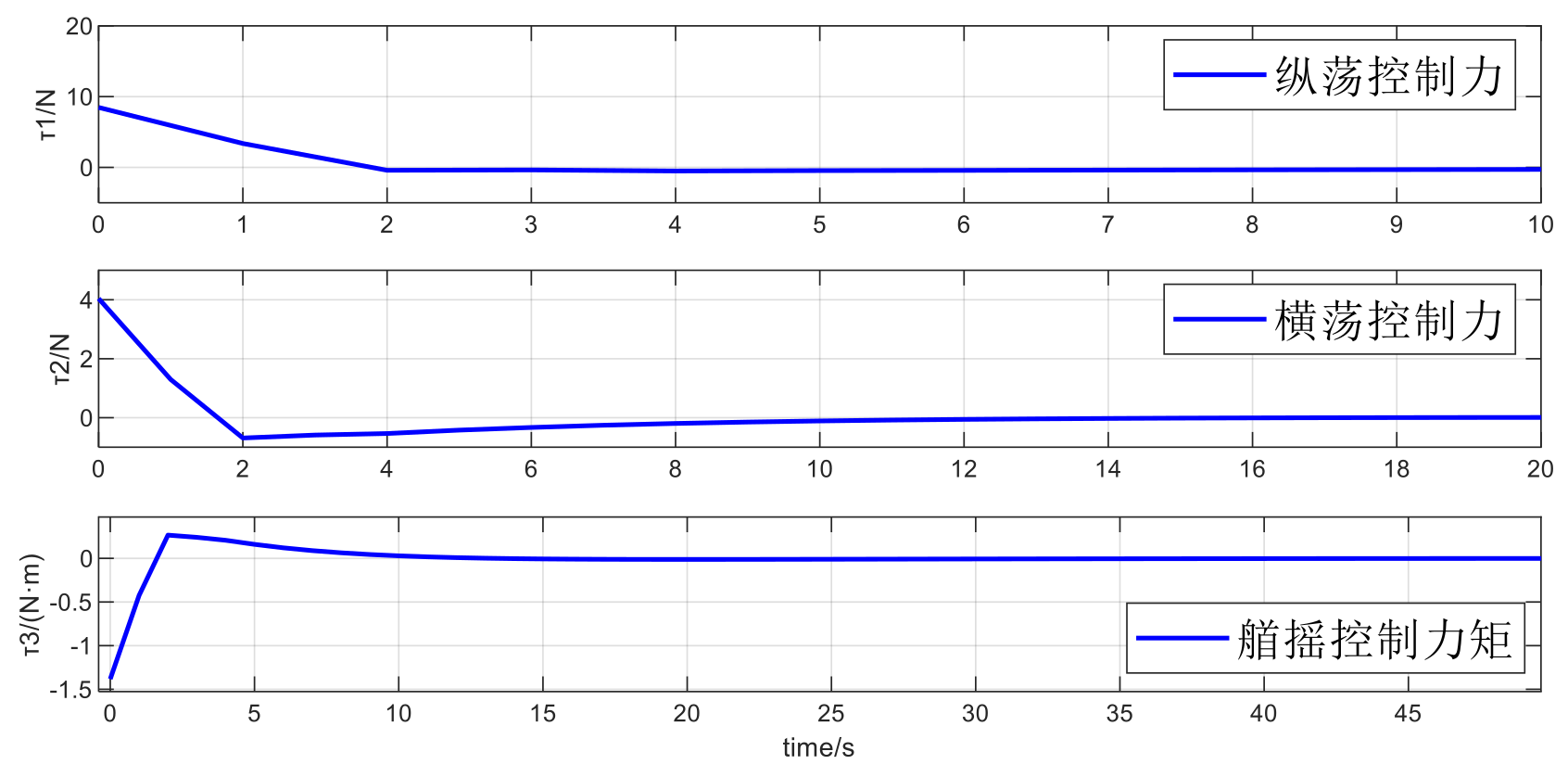
Figure 8.
Surge position change.
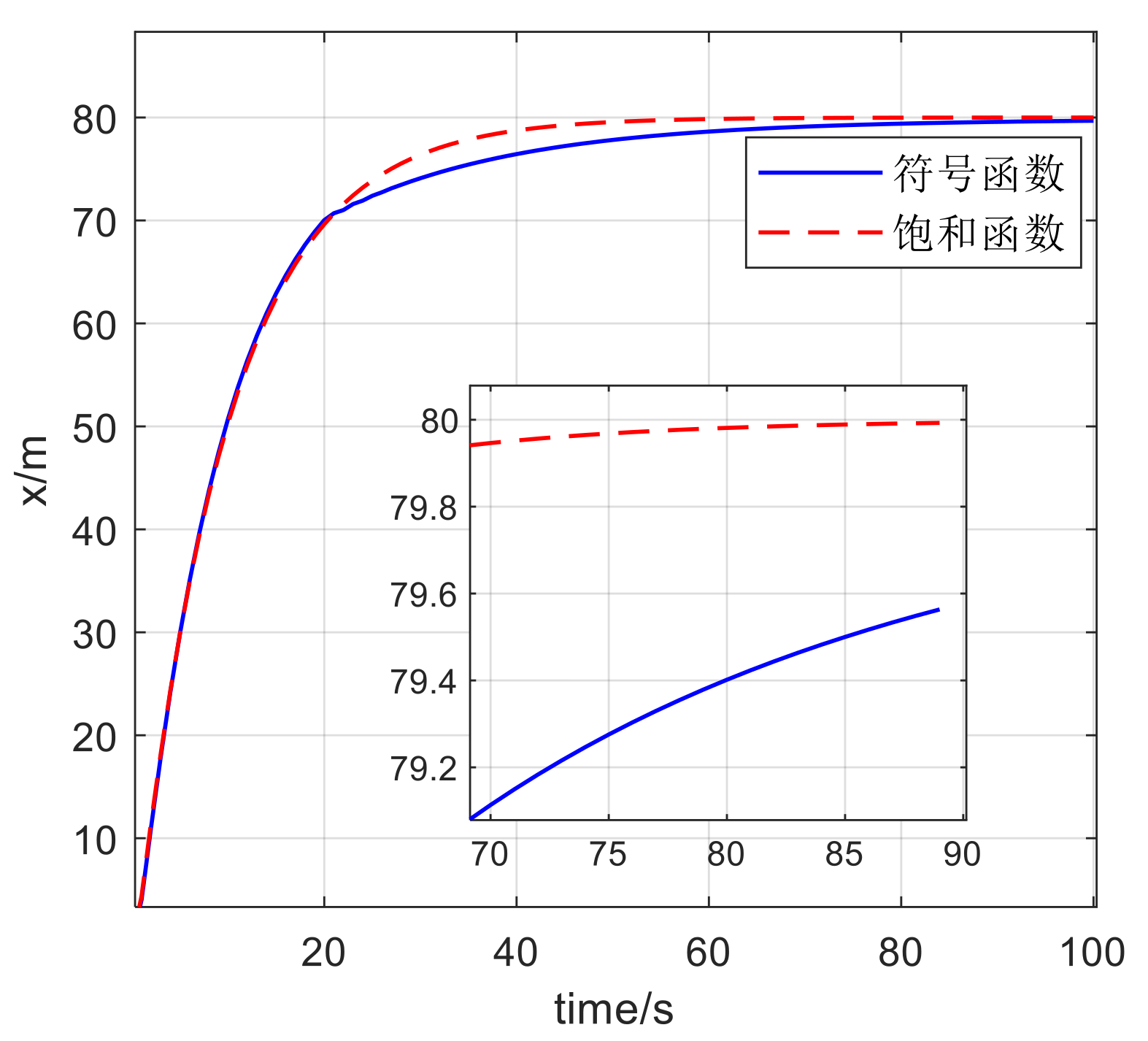
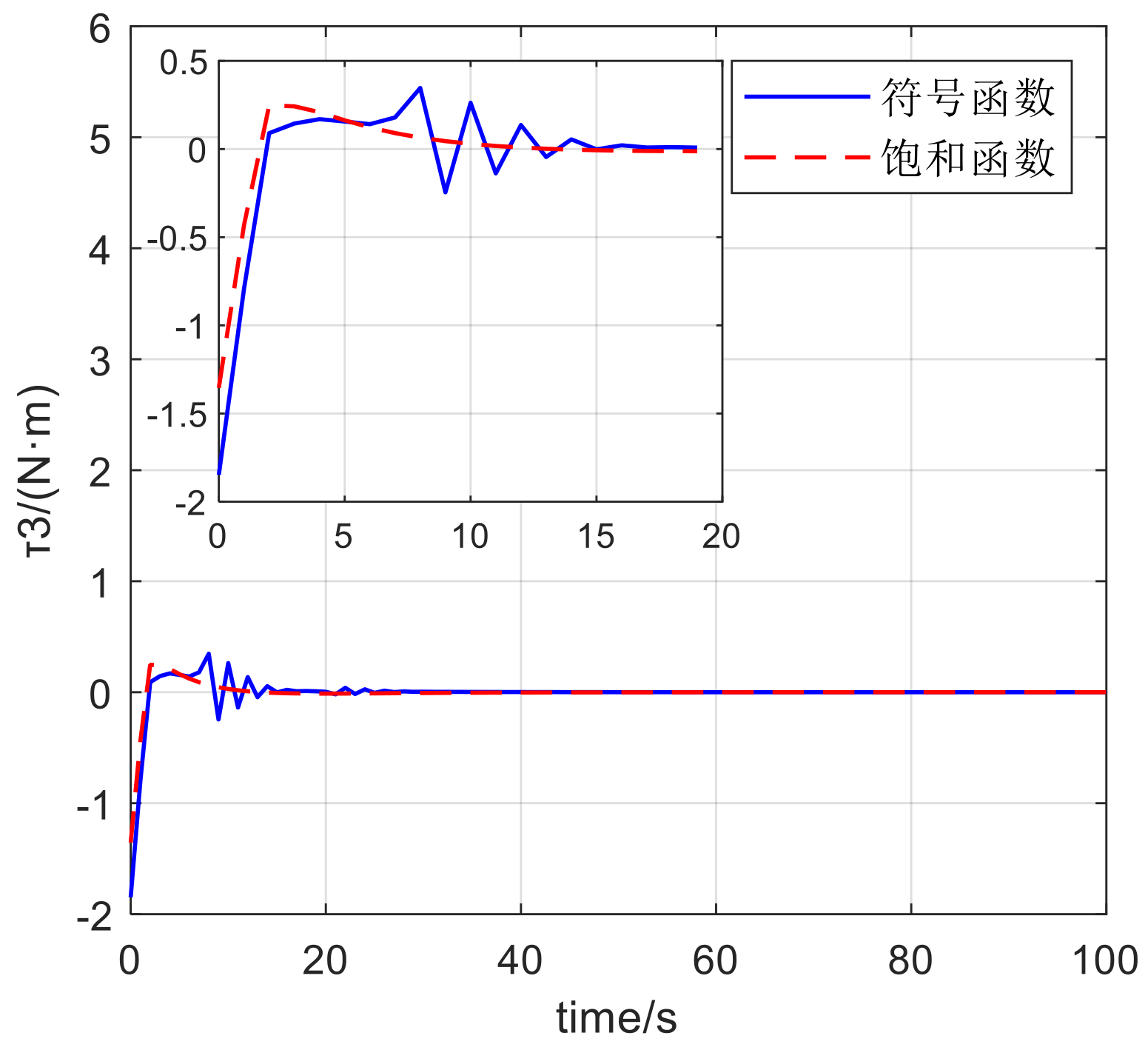
In order to further explore the performance of the sliding film controller of the power positioning terminal of dual-use vessel for intelligent research and practical training at Dalian Maritime University, the parameters of the controller were set to ,,The initial position of the ship is set to [ 0m, 0m, 0°], the desired position is set to [ 80m, 20m, 10°], and the simulation time is set to 100 s. Comparison of the simulation using the saturation function and the symbolic function is made to obtain the change of the control force of longitudinal oscillation, transverse oscillation position, bow rocking angle, and the change of the control force of the three. The saturated function has a better simulation effect and greatly reduces the vibration of longitudinal oscillation, transverse oscillation and bow rocking control force, as can be seen from the graphs.
Figure 9.
Surge control force change.
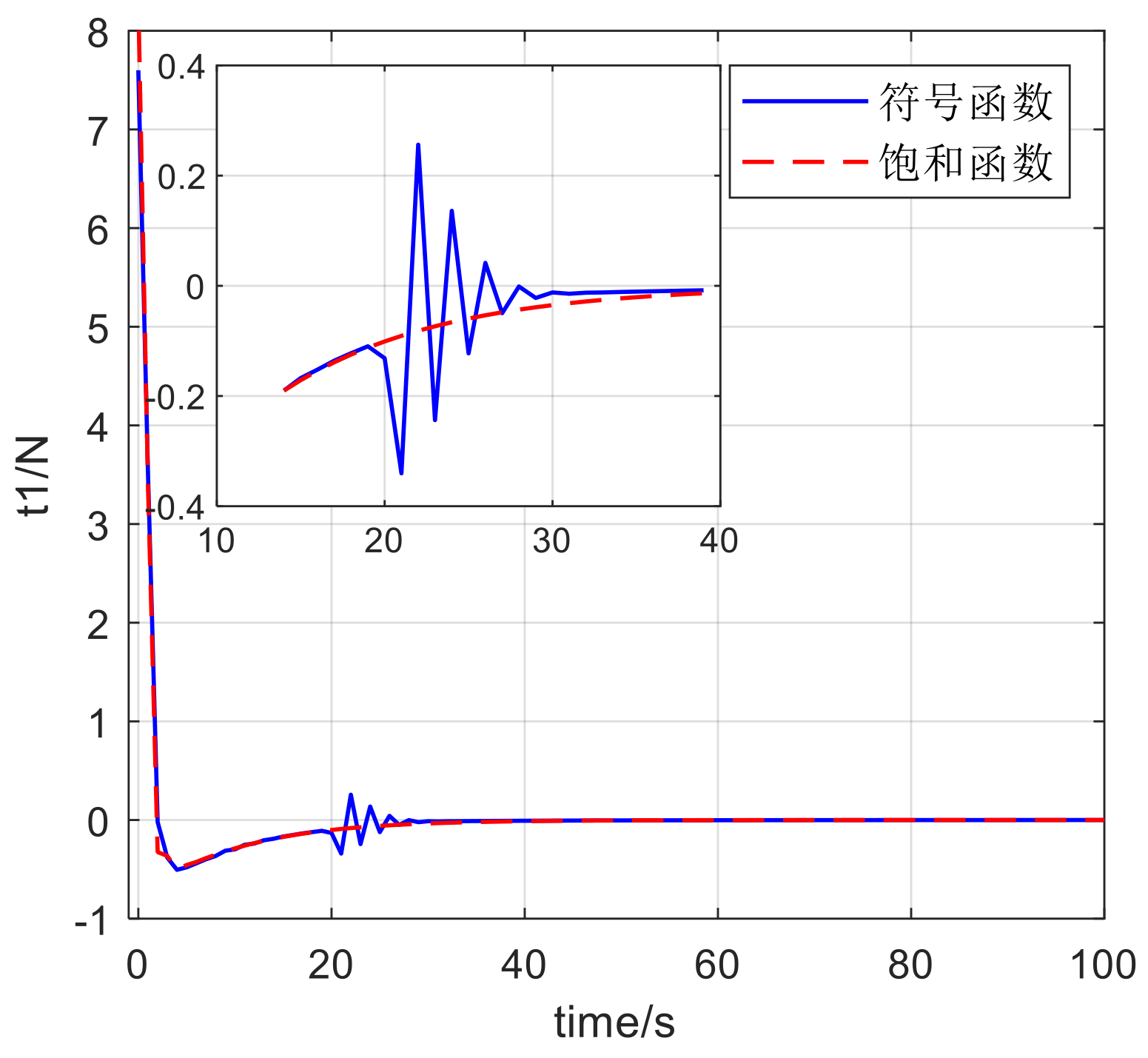
Figure 10.
Sway position change.
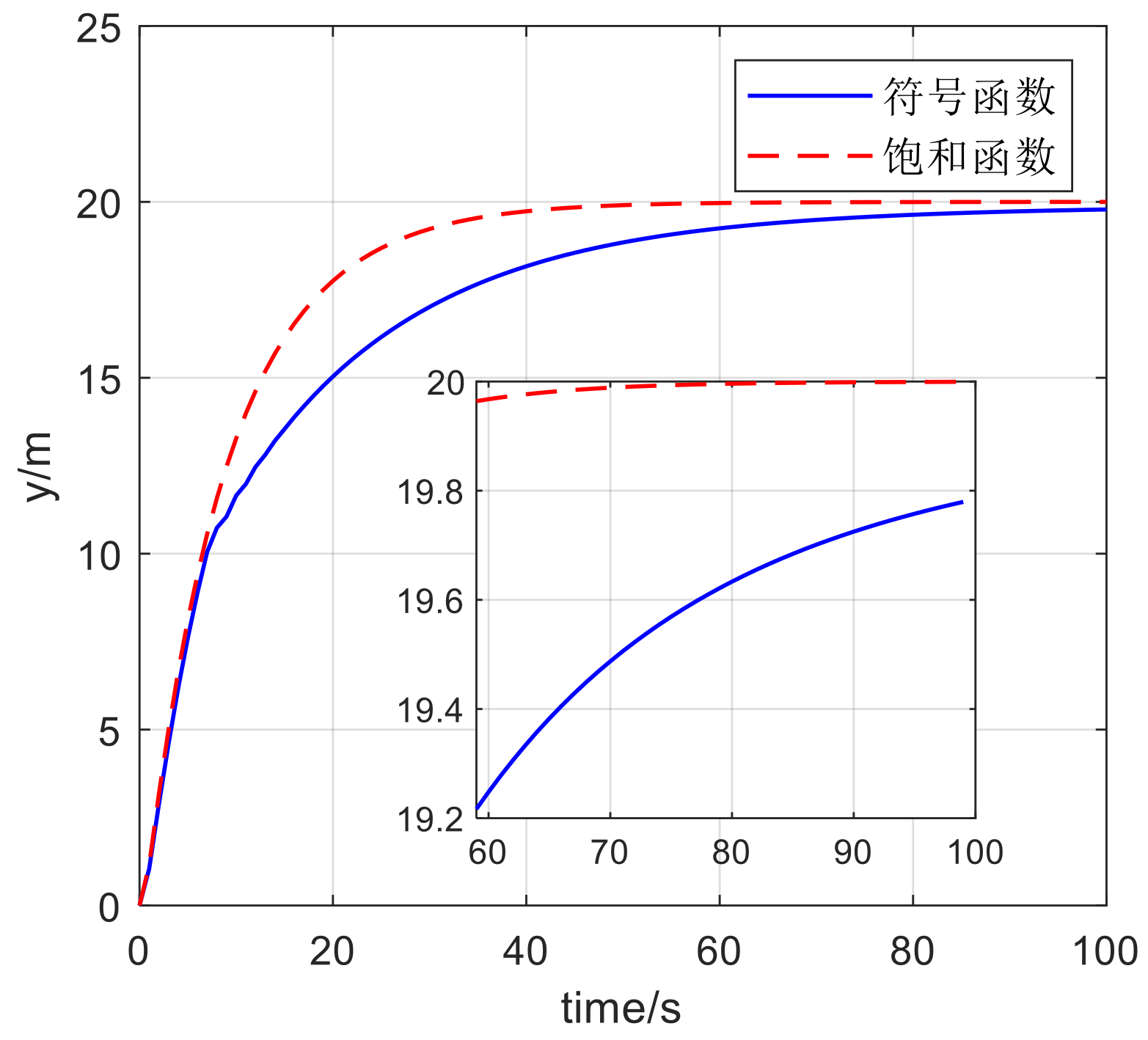
Figure 11.
Sway control force change.
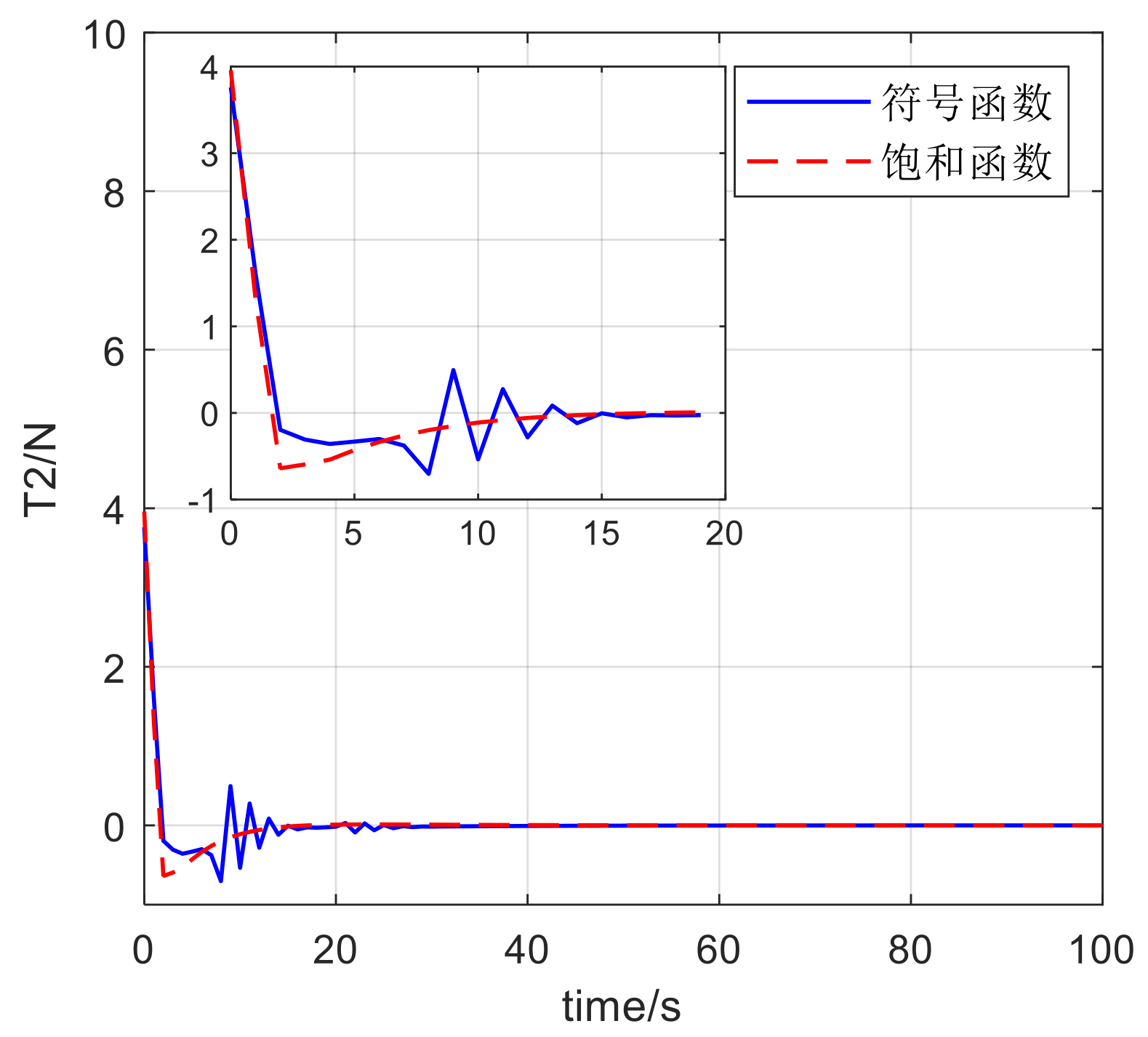
Figure 12.
Yaw position change.
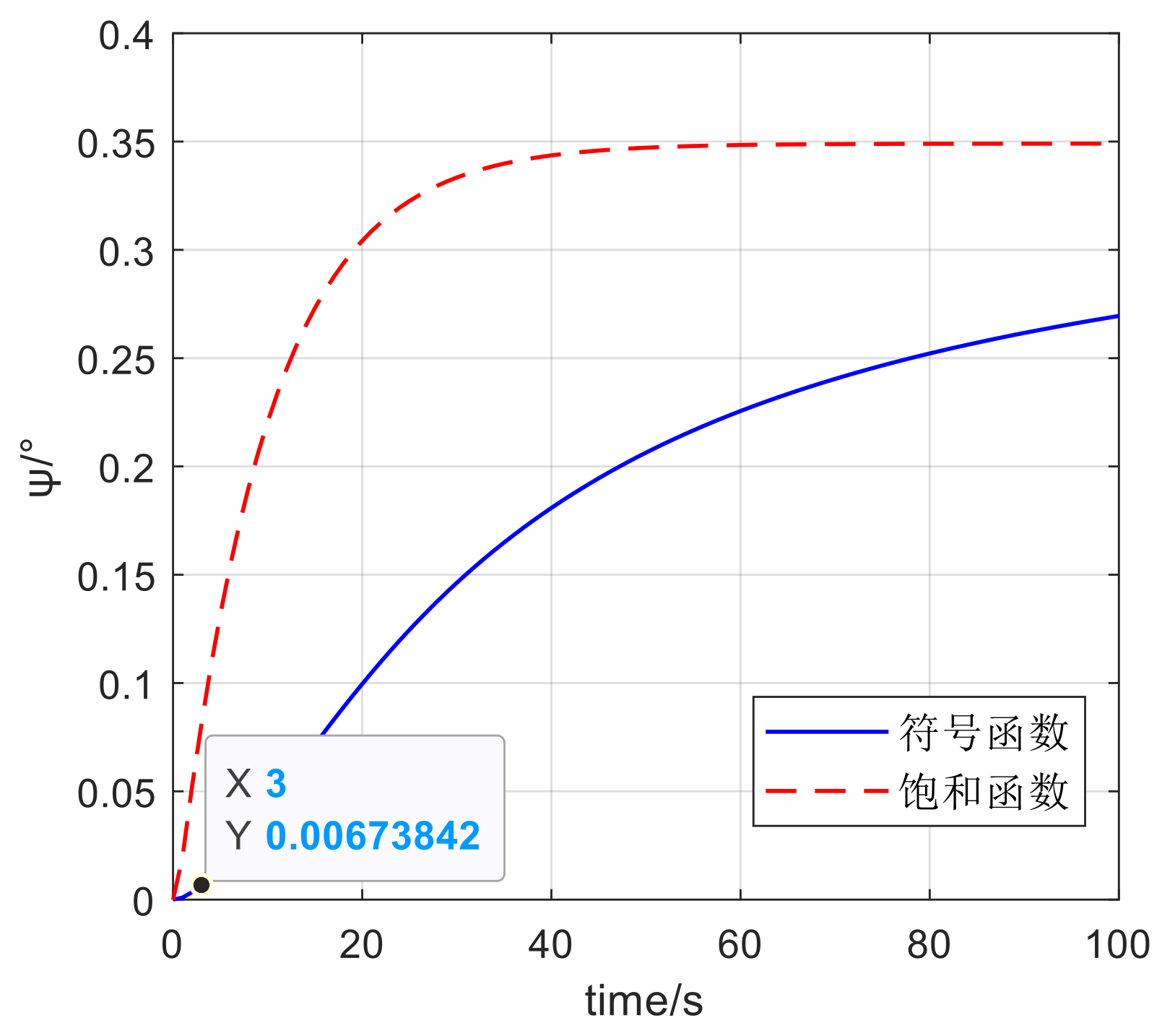
Figure 13.
Yaw control force change.
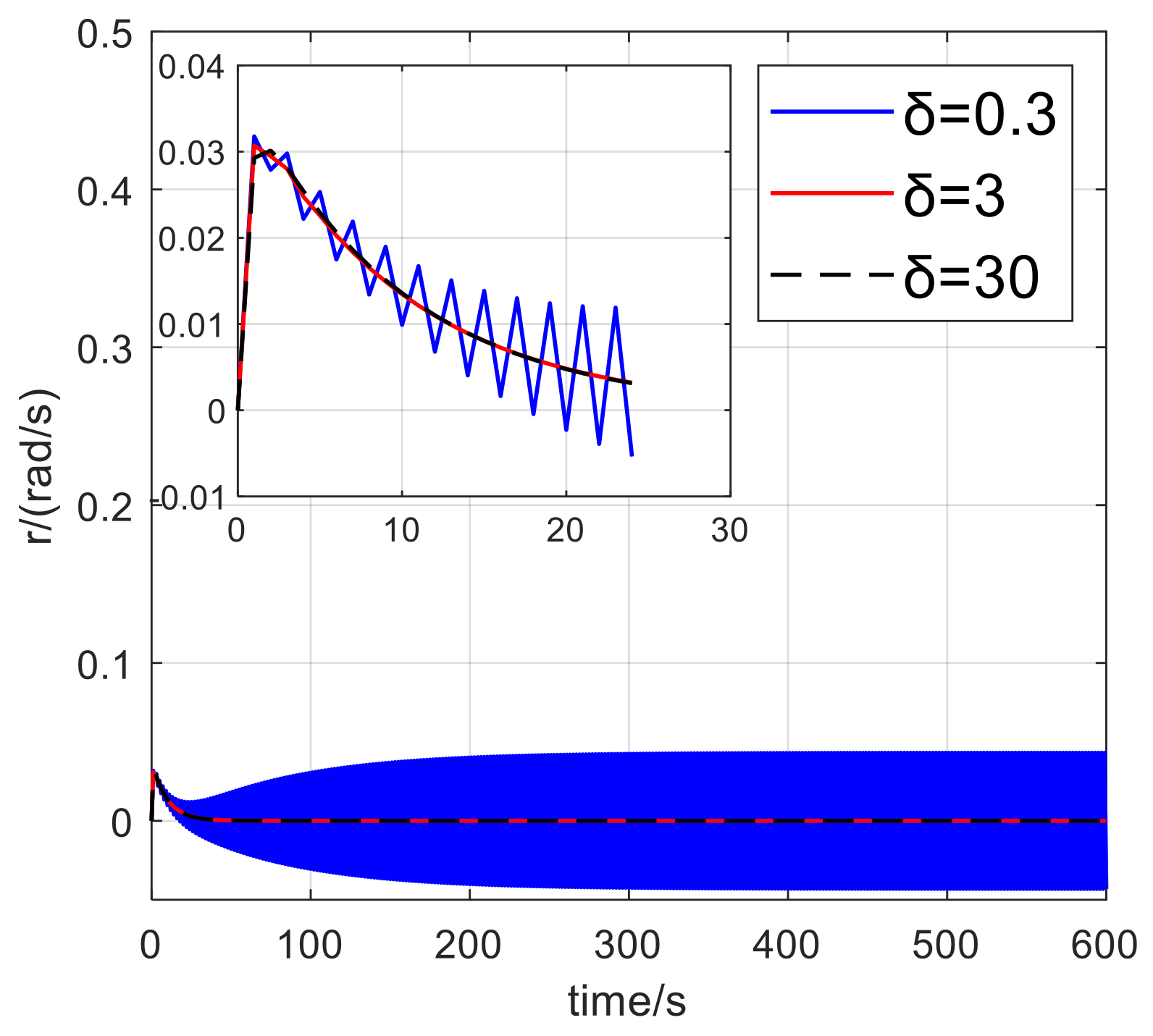
During the study, it was found that the parameter has a great influence on the control effect of the controller and other parameters have insignificant effect, so =0.3, 3, 30 was set to demonstrate the performance of the controller. The simulation time is 600s.
Figure 14.
Surge control force change.
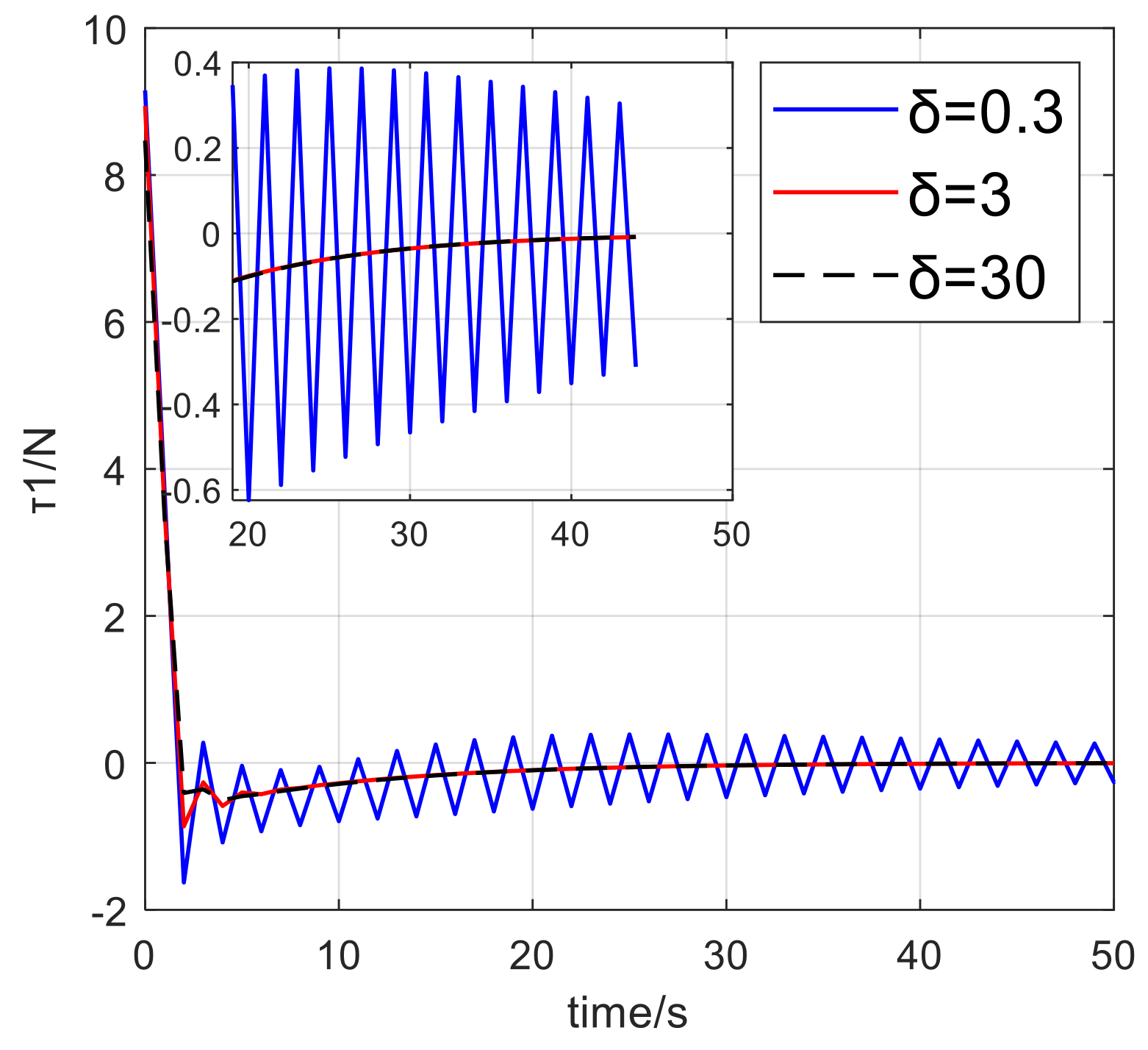
Figure 15.
Sway control force change.
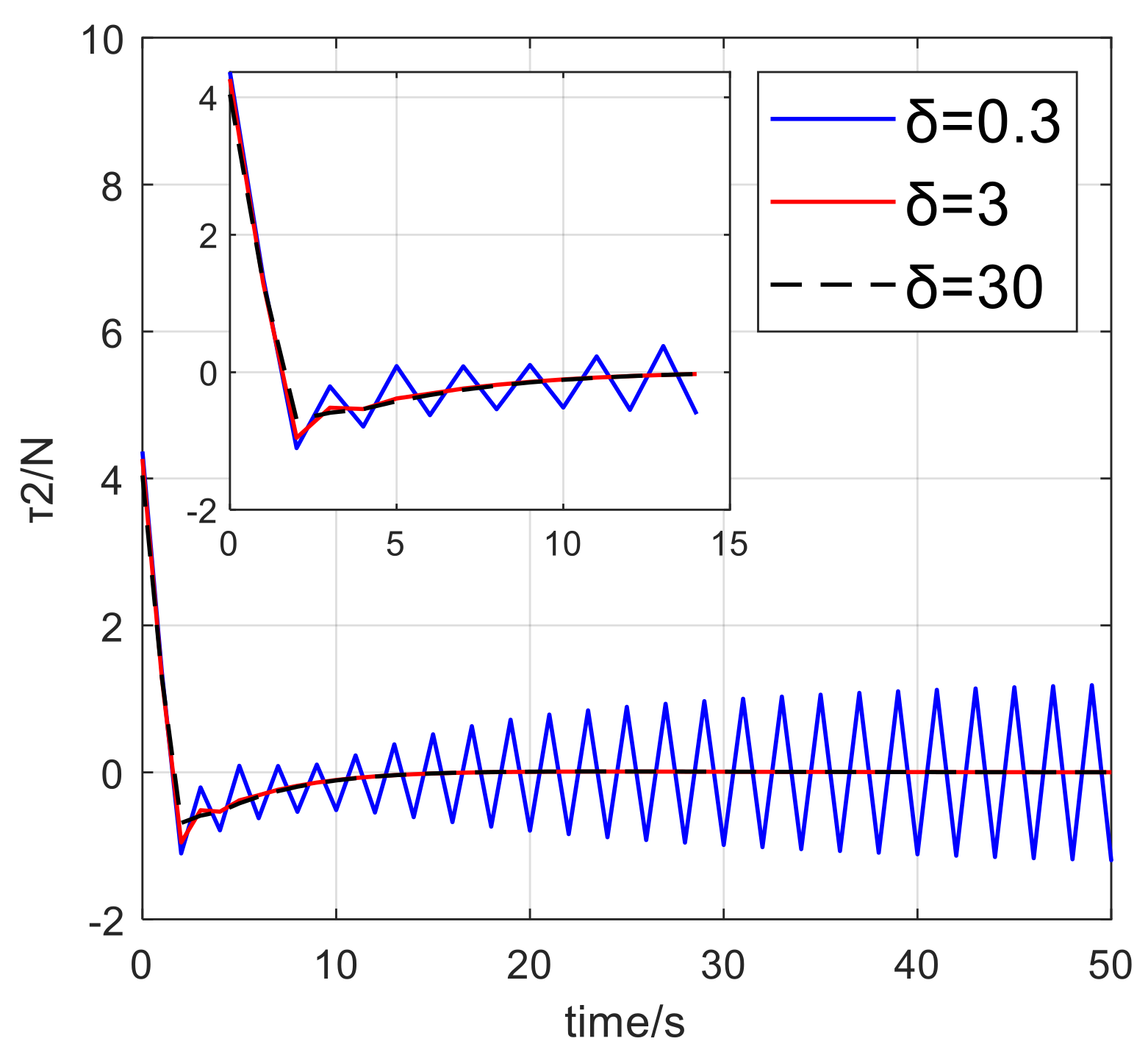
Figure 16.
Yaw control torque change.
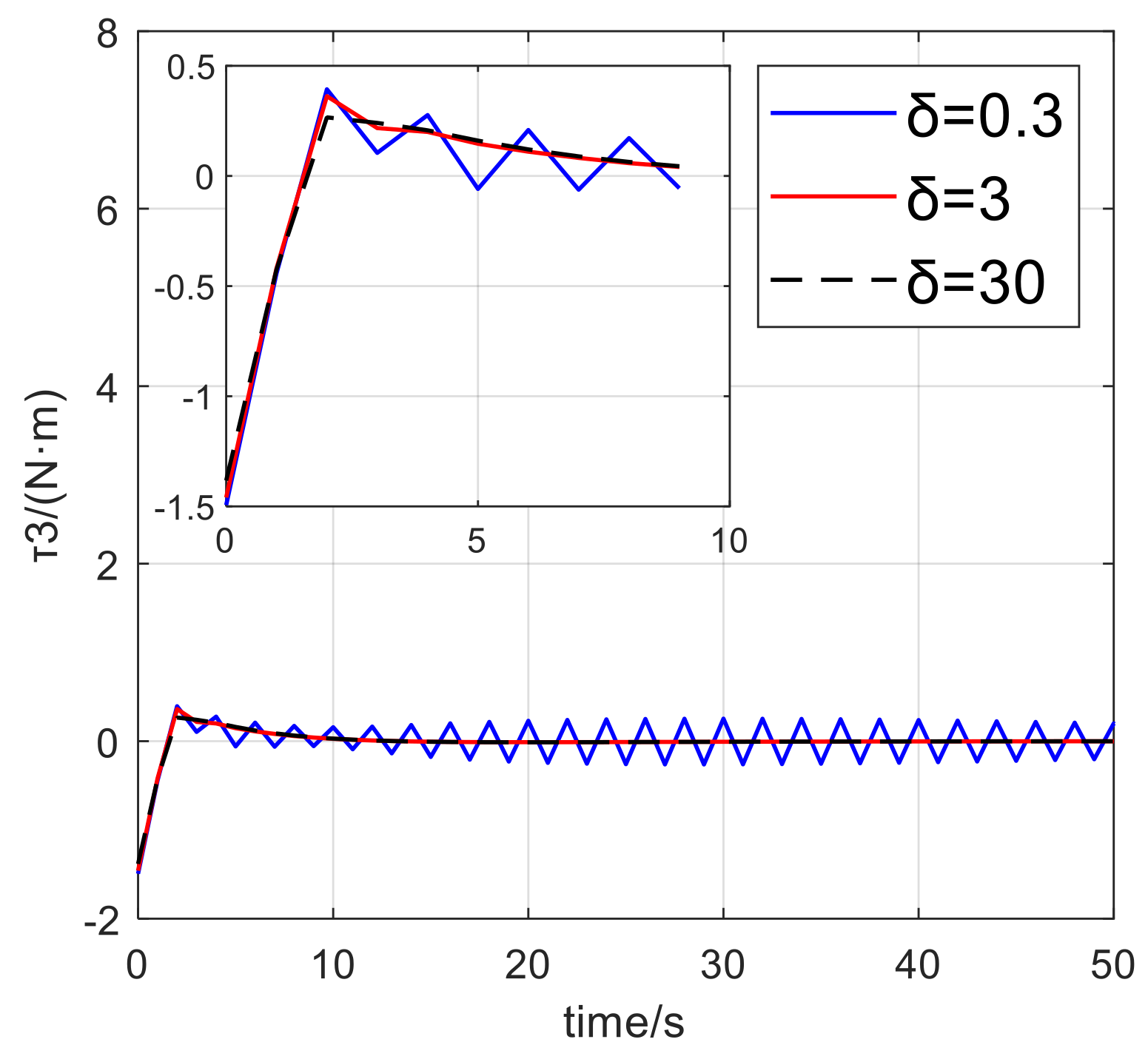
Figure 17.
Surge position change.
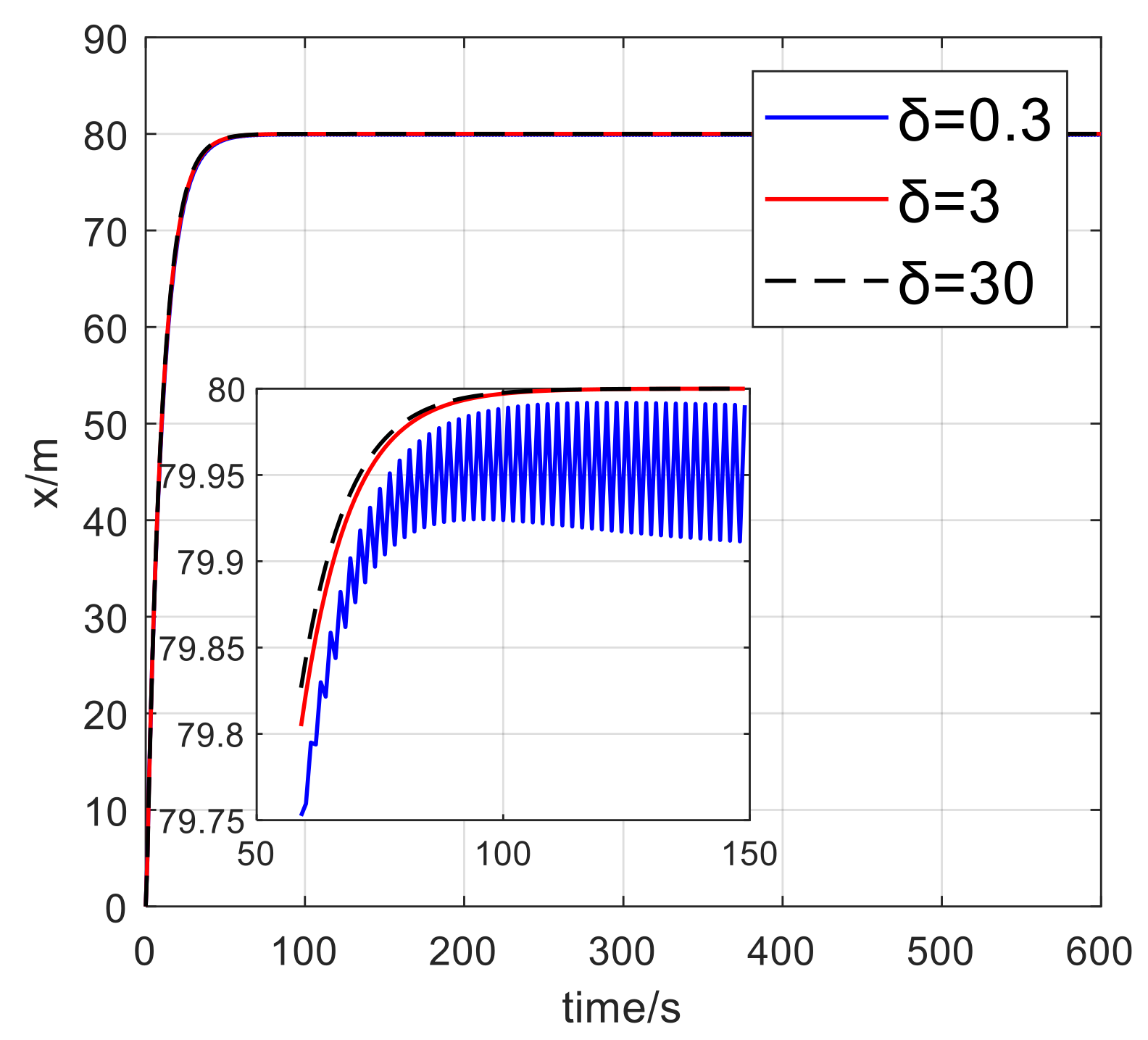
Figure 18.
Sway position change.
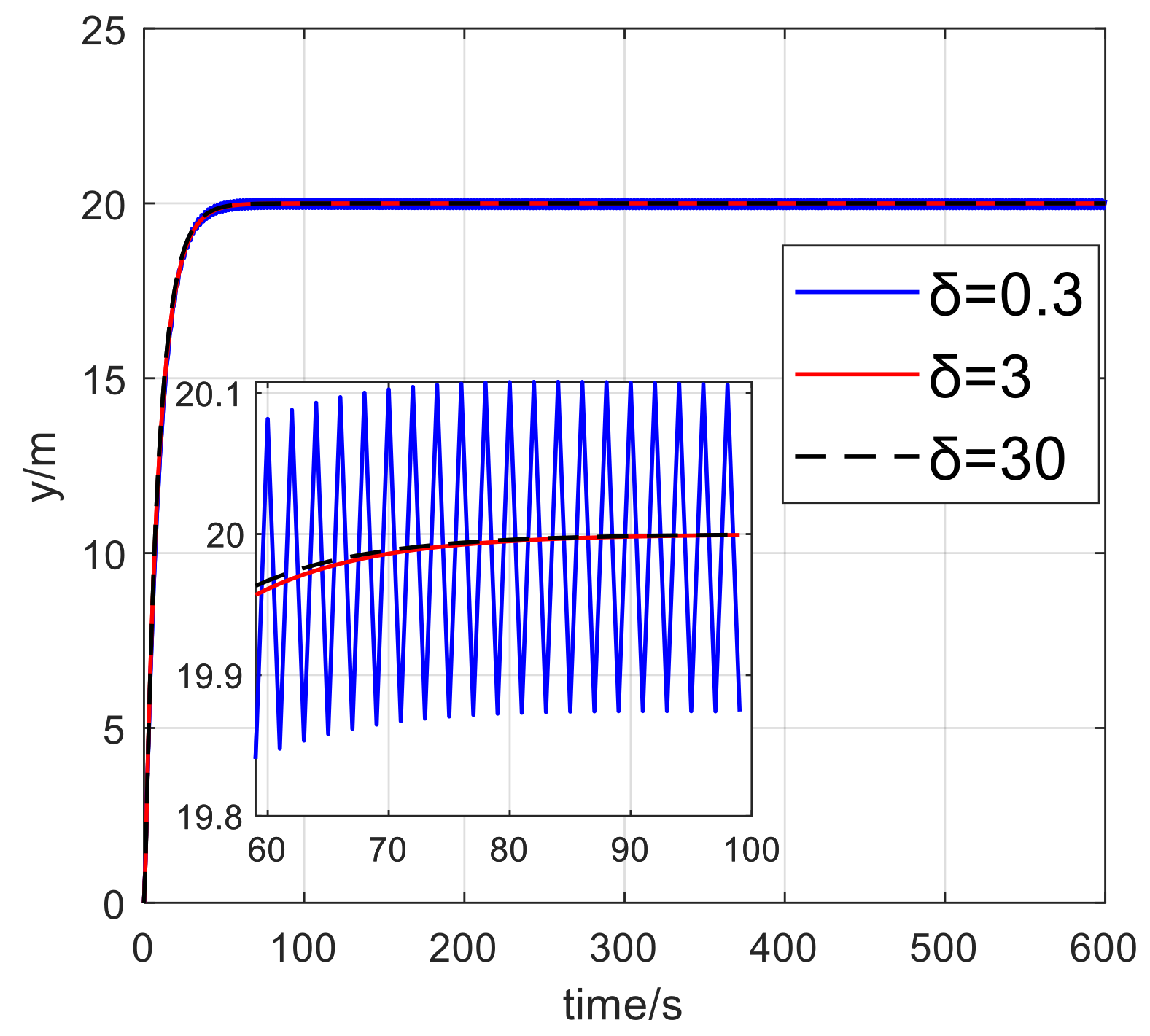
Figure 19.
Yaw angle change.
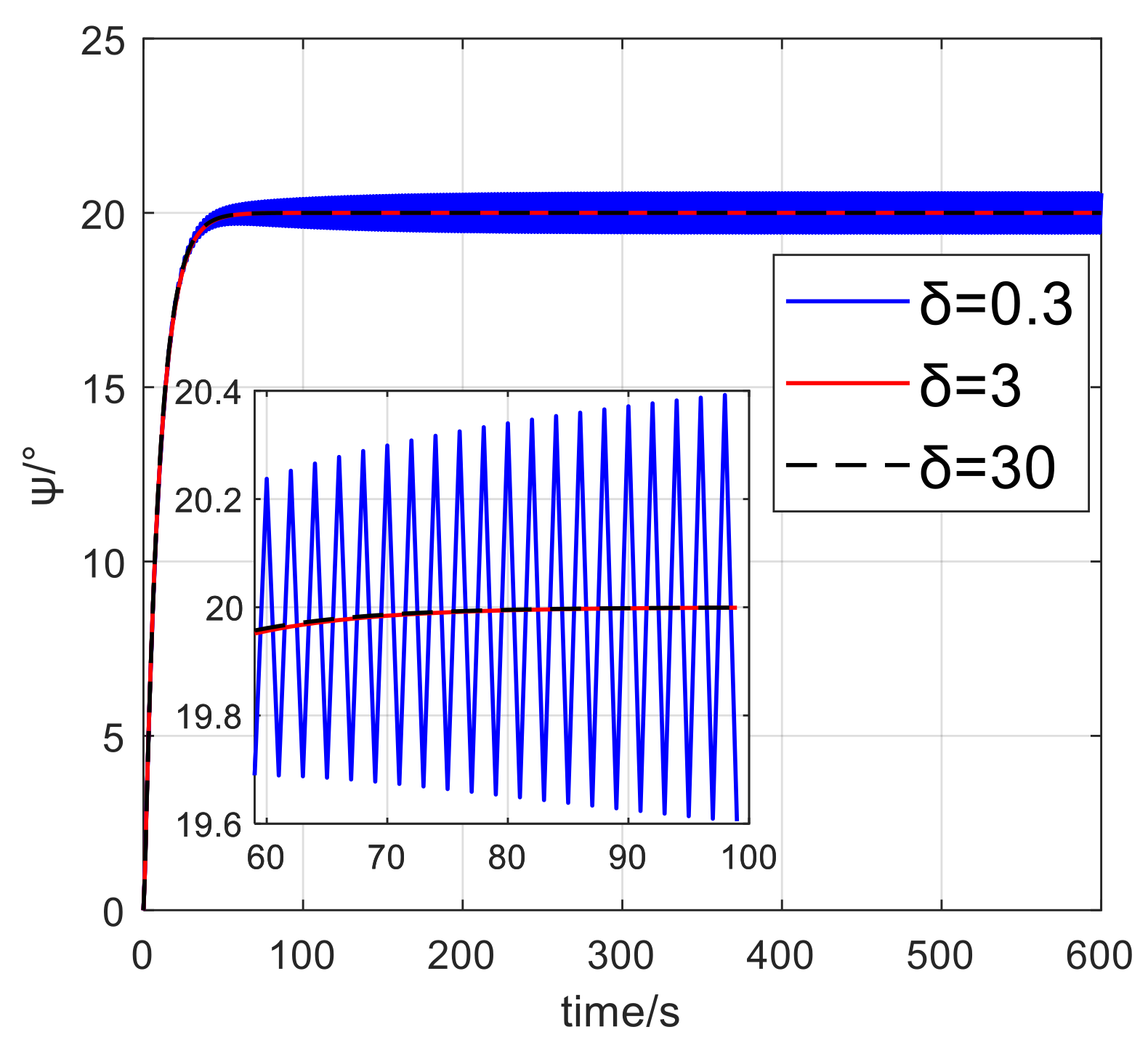
Figure 20.
Surge speed change.
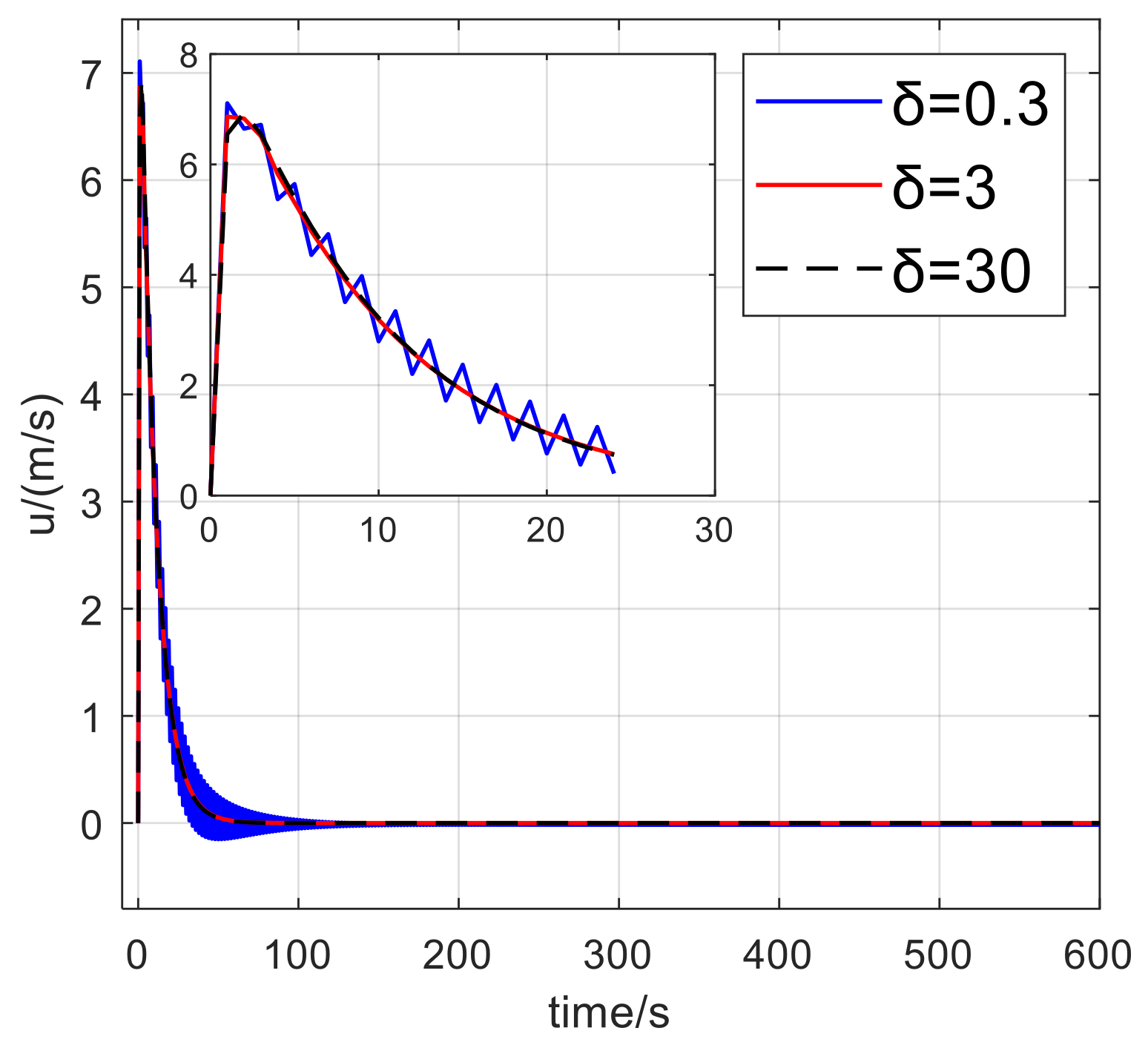
Figure 21.
Sway speed change.
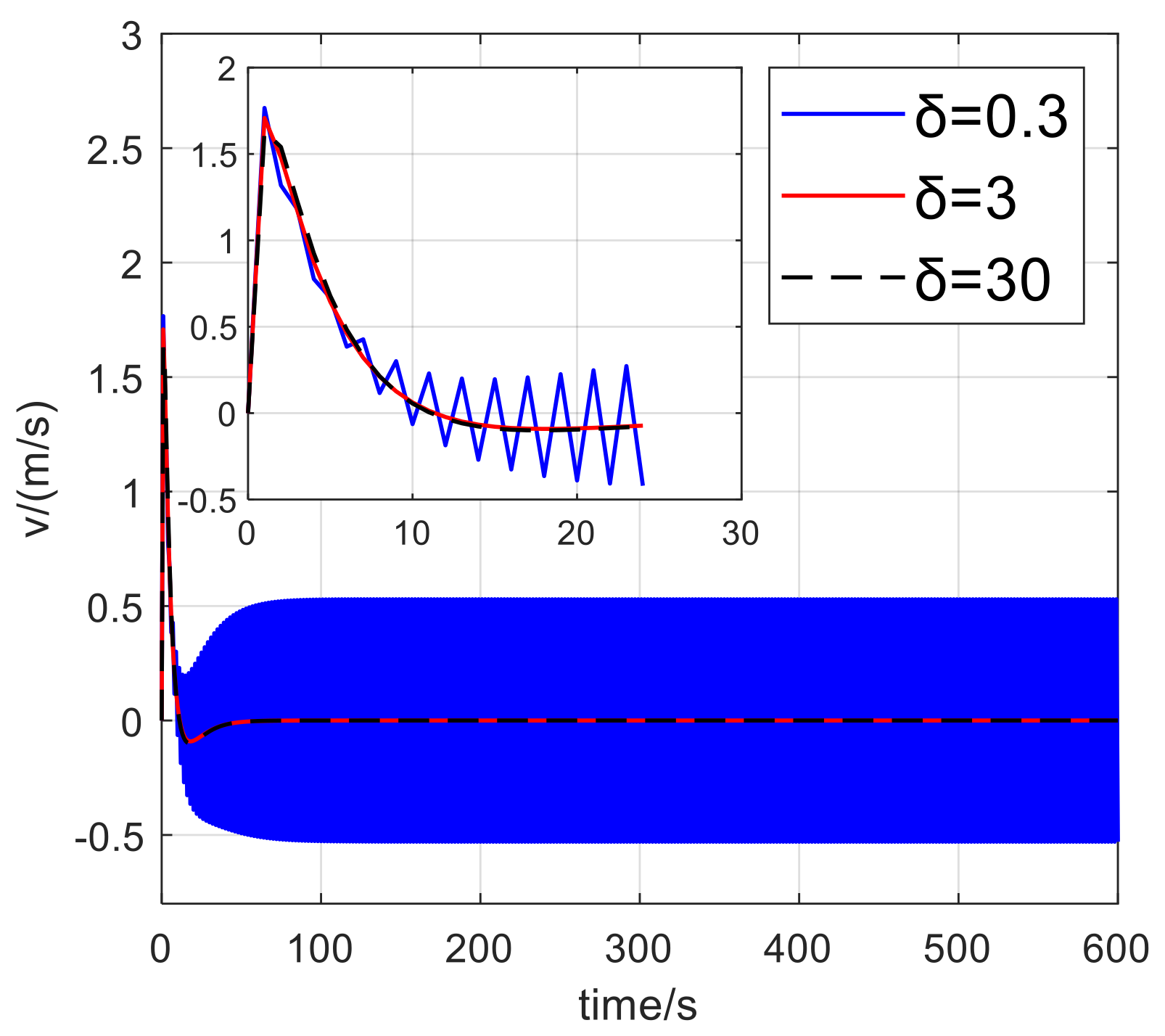
Figure 22.
Sway speed change.
5. Conclusions
Figure 15, Figure 16 and Figure 17 shows the variation of the ship control force, and analysing the images, it can be understood that the larger δ is, the smaller the jitter of the controller is, and the more precise the control force is Figure 18, Figure 19 and Figure 20 shows the variation of the ship's position in the three degrees of freedom of longitudinal oscillation, transverse oscillation, and bow rocking, and from the figure, it can be understood that the larger δ is, the ship can reach the specified position more quickly and more precisely, and the jitter is reduced. Figure 21, Figure 22 and Figure 23 shows the variation of the ship speed of longitudinal oscillation, transverse oscillation, and bow rocking. changes of the ship's longitudinal swing, transverse swing and bow rocking speed, from the figure, it can be seen that the smaller δ is, the ship's speed change situation is about drastic, and the vibration of the speed change is about drastic.
Author Contributions
Conceptualization, Z.W.; Funding acquisition, Z.H.; Investigation, Y.W.; Methodology, Z.W.; Project administration, Z.W.; Software, Z.W.; Validation, Q.Z.; Writing—original draft, Z.W.; Writing—review & editing, Z.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Innovation Project of the Offshore LNG Equipment Industry Chain (CBG3N21-2-7).
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy.
Acknowledgments
The authors extend their appreciation to the anonymous reviewers for their valuable feedback.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lin, J. Research on ship power positioning control and thrust distribution [D]. Dalian Maritime University, 2021. [Google Scholar] [CrossRef]
- YUAN Yang, ZHANG Xufeng, ZHOU Jiaqi, et al. "Numerical calculation and motion simulation of inclined sailing hydrodynamics of Yupeng[J]. Journal of Dalian University of Technology 2019, 59, 610–616.
- Shi Xiaocheng, Wang Yuanhui. Modelling and simulation of marine environment for ship power positioning[J]. Computer Simulation 2006, 16, 237–239.
- BIAN Xinqian, FU Mingyu, WANG Yuanhui. Ship Power Positioning [M]. Science Press: Beijing, 2011.
- Xu Haixiang, Feng Hui. Principles of ship power positioning system[M]. National Defence Industry Press: Beijing, 2016.
- Guan Keping, Zhang Xinfang. Research on sliding mode control ship power positioning control system[J]. Ship Science and Technology 2018, 40, 61–65.
- Liu, S. Modern ship control engineering[M]. Science Press: Beijing, 2010; pp. 32–33. [Google Scholar]
- Nie Qun. Research on the Controller of Ship Power Positioning System Based on Self-Improvement Control [D]. Dalian Maritime University, 2022. [CrossRef]
- Ke Lubing, Luo Wei, Zhao Xiaosan, et al. Hydrodynamic derivative regression formula for supply vessel position based on CFD method[J]. China Ship Research 2014, 9, 50–54.
- Man Jiangtao. Optimisation and programming of PID controller for ship power positioning system[D]. Harbin Institute of Technology, 2021. [CrossRef]
- Liu Furong. Modelling and simulation research on power positioning control system of semi-submersible vessel[D]. Wuhan University of Technology, 2011.
- Shi Lili. Modelling research of modern ship power positioning system[D]. Guangdong University of Technology, 2011.
- Wang Qiong. Research on optimisation and control strategy of ship power positioning system[D]. Dalian Maritime University, 2013.
- Xinjiang W, Huifeng Z, Yongli W. Composite hierarchical anti-disturbance control for dynamic positioning system of ships based on robust wave filter[J]. Ocean Engineering 2022, 262, 112173. [CrossRef]
- Tiantian L ,Zhenggang T ,Mingxiao S , et al.Double-mode robust model predictive control of ship dynamic positioning system based on event-triggered mechanism[J]. Ocean Engineering 2023, 286, 115536. [CrossRef]
- Xin H ,Zhongyu S ,Rui W , et al.Adaptive generalized predictive control for dynamic positioning system of ships with model unknown parameters[J]. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment 2023, 237, 579–587.
- Jaros K ,Śmierzchalski R ,Witkowska A .Analysis of data fusion algorithms for the vessel with the dynamic positioning system[J]. Przegląd Elektrotechniczny 2022, 35–39. [CrossRef]
- [1K. X D ,N. H T ,D. V D .A path planning control for a vessel dynamic positioning system based on robust adaptive fuzzy strategy[J]. Automatika 2022, 63, 580–592. [CrossRef]
Figure 2.
Ship planar motion variables.
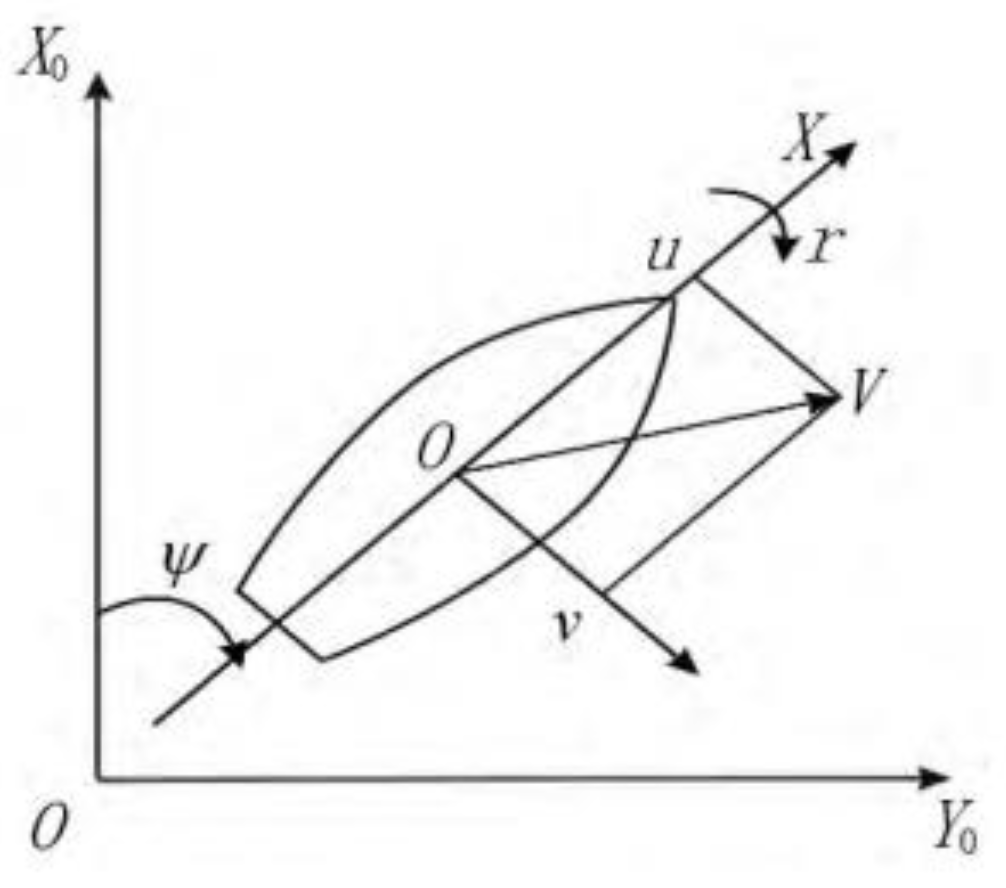
Figure 3.
Lation model of sliding mem0rane controller for ship dynamic positioning terminal.
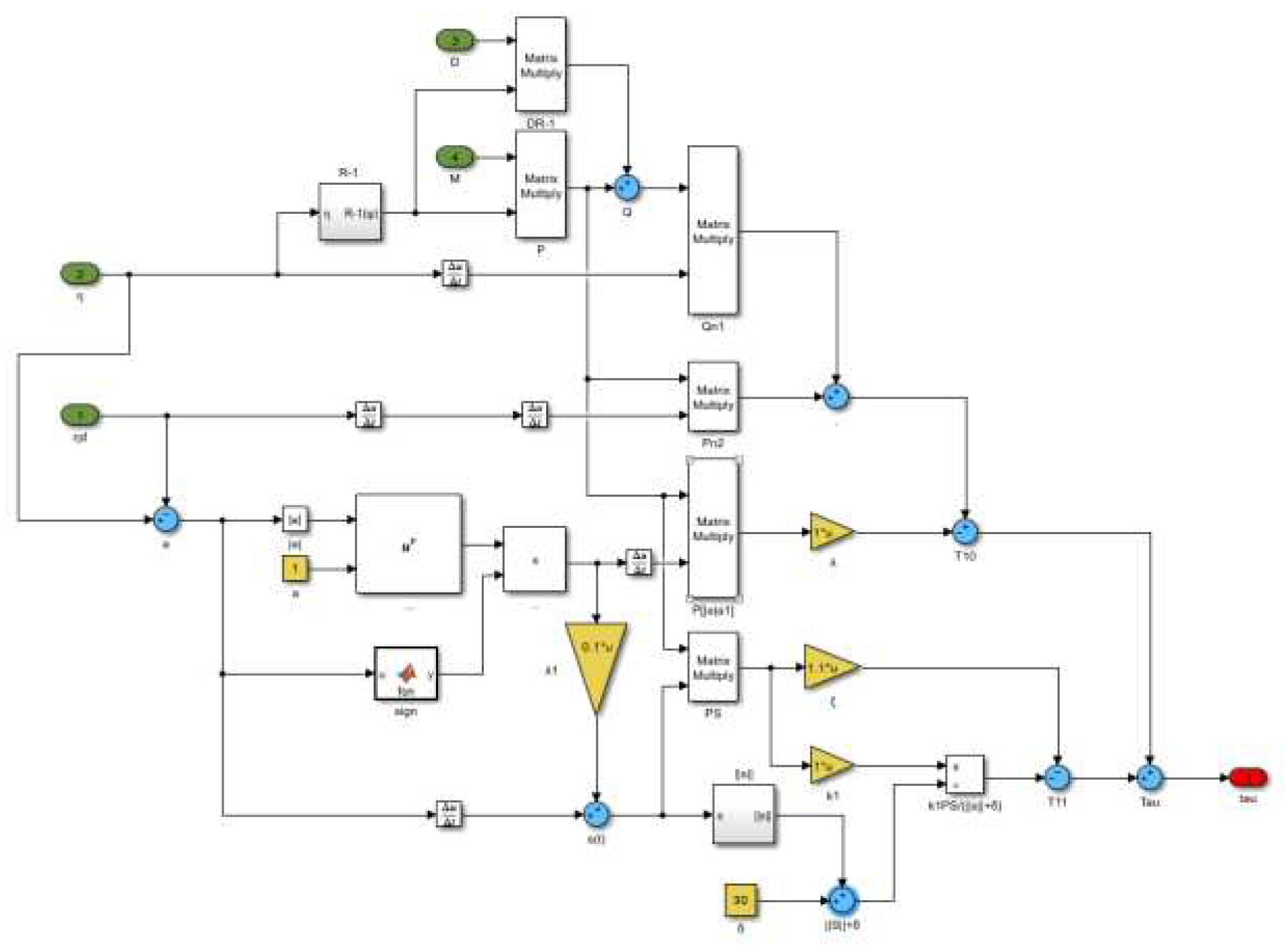

Table 1.
Main parameters of Intelligent ship.
| Parameter | Numeric Value |
|---|---|
| Ship length L/m | 69.213m |
| Ship width B/m | 10.90m |
| draft /m | 3.5m |
| Weight load m/kg | 1500t |
| displacement▽ | 1450t |
| Design speed Vd | 18.0 kn |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



