Submitted:
08 January 2024
Posted:
08 January 2024
You are already at the latest version
Abstract
This study is focused on the development of criteria for night and visual line of sight (VLOS) flights, especially in the context of beyond visual line of sight (BVLOS) drone applications. While BVLOS technology is advancing globally, regulatory restrictions and conservative legal regulations often prohibit these flights. The goal is to provide experimental guidelines for operational procedures in night and BVLOS flights. The study aims to establish empirical criteria for physical distances in night and VLOS flights, using a test team composed of a pilot, recorder, and observers. The observers are tasked with assessing the identification and recognition distances, which are crucial for safe drone operations. The criteria established are based on different variables such as aircraft size, altitude, and visual acuity. This research involves extensive flight tests at varying altitudes using different types of drones and observers with differing visual acuities (20/20, 20/13.3, and 20/10). The study also examines the effect of communication equipment limitations on recognition distance and the use of lighting devices to minimize abnormal conditions during nighttime flights. Overall, the study's findings aim to contribute to the safe and efficient planning of BVLOS and night drone flights, especially considering the ever-evolving technology and regulatory landscape in this field.
Keywords:
BVLOS
; VLOS
; night flight
; UAV
; drone
1. Introduction
Various drone applications are being developed to undertake complex missions based on beyond visual line of sight (BVLOS) flight[1,2,3,4,5,6]. Advanced aviation nations, including the United States, are developing traffic management systems in preparation for the commercialization of these drone applications, and these systems incorporate automated management features for BVLOS flight. Countries such as the United States, Europe, and Japan are utilizing various technologies, including artificial intelligence and big data, to develop the infrastructure and operational technology required for BVLOS flights[7,8,9]. Additionally, key technologies for night flights are similar to those for non-visual flights, with the inclusion of a night vision system.
Figure 1 illustrates the essential equipment for night flights, featuring an infrared camera and a thermal imaging camera. These are crucial components that must be installed for nighttime operations. As part of the latest technologies, systems based on Lidar sensors are employed to estimate the aircraft's position when GPS is unavailable, enabling BVLOS flight but also during night operations. Figure 2 demonstrates a system utilizing Lidar sensors to determine the position in no-GPS Environments. However, it should be noted that some technologies are still in the development stage, and various tests are necessary for commercialization[10,11].
While drone control systems that consider BVLOS flight are under development, the legal regulations for BVLOS flight in most countries are generally stated conservatively, resulting in a prohibition of BVLOS flight. The definition of visual line of sight (VLOS) in aviation regulations is not explicitly defined and is based on the distance at which the operator can see the drone. This distance can vary depending on the operator's eyesight and the size of the drone, making it a subjective criterion. Moreover, it is also necessary to consider whether the operator can maintain smooth control even when the drone appears as a point in their line of sight[12,13,14,15,16].
The definition of night flight is temporally defined as the period from sunset to sunrise, and flying within this time range is considered night flight. Additionally, night flights are also prohibited under South Korea's aviation safety regulations[17,18,19,20,21,22].
Some countries, including South Korea, have implemented a special flight waiver system that partially permits BVLOS and night flights while maintaining a minimum environment for technological development and validation. South Korea's special flight waiver system includes hardware and software requirements for BVLOS and night flights[23].
Table 1 presents the requirements for obtaining special flight approvals for beyond visual line of sight (BVLOS) and night flights in South Korea[23]. The requirements for night flights include one or more observers, continuously illuminated collision prevention lights, automatic flight mode, infrared camera FPV, and ground lighting devices with searchlights for takeoff and landing areas. In contrast, the requirements for non-visual flights encompass observers, communication equipment for pilots and observers, manual/semi-automatic/automatic flight modes, CCC(command, control, and communication) equipment, abnormal state alarm functions, communication redundancy, FPV, GCS notification and external operator notification. The criteria for night flights and BVLOS operations demand various additional equipment and performance capabilities compared to visual line of sight (VLOS) flights, thereby increasing the operational complexity. Therefore, by understanding the physical limits of night and VLOS flights, it becomes possible to determine the applicability of these requirements, leading to more efficient flight planning.
As a result, this study aims to establish empirical criteria for physical distances in night and VLOS flights through various flight tests and to provide experimental guidelines for operational procedures in night and BVLOS flights.
2. Materials and Methods
2.1. Flight Test Location and Aircraft
As shown in Figure 3, the test flight location for this study is the Daegu Unmanned Aerial Vehicle Demonstration Area. The airspace has an altitude of 450m (AGL), a width of 1,000m, and a length of 7,000m, with mountains on either side and a river at the center.
The operating conditions for fixed-wing flight tests had a temperature range from a minimum of -2.2°C to a maximum of 18.3°C, with a maximum wind speed of 5.60 m/s. For multi-copter flight tests, the temperature ranged from a minimum of -1.4°C to a maximum of 18.1°C, with a maximum wind speed of 7.80 m/s.
The selected aircraft for the thorn flight and nighttime flight drone identification distance tests consist of two fixed-wing and four multi-copters, categorized by aircraft size as shown in Table 2. The drones used in this study were selected based on their availability and widespread use in South Korea. The RemoEye-002B is the civilian version of a drone commonly used by the South Korean Army. The Parrot Disco is known for its frequent use in aerial reconnaissance. The XD-I4T and XD-X8S are drones from a consortium company participating in this research. The MAVIC Pro and Inspire 2s are drones manufactured by DJI, widely sold in South Korea. The specifications of each aircraft were measured and investigated.
For the visible flight and nighttime flight drone identification distance tests, the required features include automatic flight and Fail-Safe functions. Automatic flight utilizes a satellite navigation system that calculates the user's current position by receiving signals from GPS (Global Positioning System) satellites, allowing the drone to fly automatically. Fail-Safe, on the other hand, is a feature designed to ensure safety by automatically triggering a return to home or emergency landing in the event of abnormal conditions such as communication loss, battery depletion, system malfunctions, and so on.
2.2. VLOS Flight Test Scenario and Operational Procedures
The flight test team consists of one pilot, one recorder and four observers. The pilot secures a location after checking the remote control, ensuring VLOS and maintaining a safe distance. The recorder is responsible for recording communication, reporting, and measurement data in case of emergencies during the flight. Among the four observers, three are positioned on the same line as the pilot with a 2m interval to the left and right, conducting identification tests. The remaining observer moves closer to the expected unmanageable distance of the aircraft, ensuring safety during flight and managing abnormal situations. The three observers, with visual acuity of 20/20, 20/13.3, and 20/10, report to the recorder as soon as they are unable to identify or recognize the flying aircraft, and the recorder records the distance indicated on the GCS based on the reports of the three observers.
The criteria for observer judgment are depicted in Figure 4. Observers have two criteria for identification and recognition. Identification is the distance at which observers can directly observe the drone's body shape and flight status with the naked eye, while recognition is defined as the maximum distance at which the drone's body shape, including a point shape, is no longer visible to the naked eye[24,25].
Figure 5 provides an overview of the flight tests. The flight tests are divided into three cases based on altitude: 50m, 100m, and 150m. The aircraft ascends from the takeoff point to each specified altitude and then flies to the operational safety distance with a speed of at least 10m/s suitable for the weather conditions. In the event of an abnormal situation during the maximum flight distance measurement test, the Fail-Safe function is used to return the aircraft[24,25].
2.3. Lighting Device Test Scenario and Operational Procedures
In order to establish a safe flight test environment, ground identification distance tests were conducted on the lighting devices mounted on drones. Based on the results of these tests, distance criteria for test flights were set to minimize abnormal conditions such as communication loss that can occur during nighttime flights.
Table 3 shows the lighting devices used in the test and their specifications.
Figure 6 provides an overview of the ground lighting device distance test. Three observers with visual acuity of 20/20, 20/13.3, and 20/10 are positioned on the same line. The pilot turned on the lighting devices at specified distances, measuring the identification distance. The test was conducted at distances ranging from 1,100 to 500 meters. The pilot's mission is to turn on the lighting devices at the designated distances, directing the light towards the direction of the observers. The tasks of observers 1 to 3 are to inform the recorder whether they can perceive the light. The recorder records the perception of observers 1 to 3 at different distances. Observer 4 is responsible for handling responses to potential abnormal conditions and safety during the test.
A total of 36 tests were conducted, with five lighting products and three colors (WHITE, RED, BLUE). The lighting device location distance was set by testing the identifiability from the maximum communication distance of 1,100m in the ISM band, gradually decreasing in 100m increments for each color until a minimum of 500m. For example, if identification occurred at 1,100m, the test was concluded; otherwise, a test was conducted at a reduced distance of 1,000m. However, the LED (5050) RED test could not proceed smoothly due to equipment malfunction. The illuminance at the test site was 0 lux.
2.4. Night Flight Test Flight Test Scenario and Operating Procedures
The maximum distance for nighttime flights was set at 1,100 meters, and the flight tests were conducted from 30 minutes after sunset to 30 minutes before sunrise. The on-site illuminance was 0 lux. Table 4 displays the two fixed-wing drones used (RemoEye-002B, Parrot Disco), as well as the two multi-copters (XD-I4T, XD-X8S) and their respective lighting device attachment locations. Figure 7 provides a concept diagram of the nighttime flight tests. RemoEye-002B had its lighting device mounted at the front due to structural reasons, and the other three drones had their lighting devices attached to the rear. Among the fixed-wing drones, RemoEye-002B took off from 1,100m and flew towards the direction of the observers, while the other three drones took off from the observer's location and moved away during the flight.
3. Results
3.1. VLOS Flight Test Results
The test results for identification distances based on flight altitude and eyesight are presented in Table 5. For fixed-wing aircraft, the RemoEye-002B was tested a total of 40 times. The maximum identifiable distance for RemoEye-002B was observed at 938m (with visual acuity 20/10) when flying at an altitude of 150m. At an altitude of 150m, the average identification distance based on visual acuity was 577m for 20/20 vision, 619m for 20/13.3 vision, and 715m for 20/10 vision. At an altitude of 100m, the average identification distance was 526m for 20/20 vision, 553m for 20/13.3 vision, and 654m for 20/10 vision. At an altitude of 50m, the average identification distance was 418m for 20/20 vision, 459m for 20/13.3 vision, and 547m for 20/10 vision.
For the Parrot Disco, a total of 35 tests were conducted. The maximum identifiable distance for Parrot Disco was observed at 641m (with visual acuity 20/10) when flying at an altitude of 150m. At an altitude of 150m, the average identification distance was 477m for 20/20 vision, 511m for 20/13.3 vision, and 584m for 20/10 vision. At an altitude of 100m, the average identification distance was 398m for 20/20 vision, 415m for 20/13.3 vision, and 471m for 20/10 vision. At an altitude of 50m, the average identification distance was 373m for 20/20 vision, 403m for 20/13.3 vision, and 483m for 20/10 vision.
For multi-copter aircraft, XD-I4T was tested a total of 35 times, and XD-X8S was tested a total of 40 times. XD-I4T showed a maximum identifiable distance of 1,037m (with visual acuity 20/10) when flying at an altitude of 100m. XD-X8S had a maximum identifiable distance of 810m (with visual acuity 20/10) at an altitude of 100m. At an altitude of 150m, XD-I4T had an average identification distance of 504m for 20/20 vision, 681m for 20/13.3 vision, and 787m for 20/10 vision. At an altitude of 100m, the average identification distance was 498m for 20/20 vision, 688m for 20/13.3 vision, and 781m for 20/10 vision. At an altitude of 50m, the average identification distance was 474m for 20/20 vision, 538m for 20/13.3 vision, and 582m for 20/10 vision. For XD-X8S, at an altitude of 150m, the average identification distance was 457m for 20/20 vision, 616m for 20/13.3 vision, and 708m for 20/10 vision. At an altitude of 100m, the average identification distance was 511m for 20/20 vision, 631m for 20/13.3 vision, and 710m for 20/10 vision. At an altitude of 50m, the average identification distance was 484m for 20/20 vision, 610m for 20/13.3 vision, and 674m for 20/10 vision.
DJI Inspire 2 was tested a total of 38 times, and DJI Mavic Pro was tested a total of 26 times. For DJI Inspire 2, at an altitude of 150m, the maximum identifiable distance was 698m (with visual acuity 20/10). For DJI Mavic Pro, at an altitude of 50m, the maximum identifiable distance was 310m (with visual acuity 20/10). At an altitude of 150m, DJI Inspire 2 had an average identification distance of 288m for 20/20 vision, 420m for 20/13.3 vision, and 512m for 20/10 vision. At an altitude of 100m, the average identification distance was 321m for 20/20 vision, 435m for 20/13.3 vision, and 526m for 20/10 vision. At an altitude of 50m, the average identification distance was 313m for 20/20 vision, 399m for 20/13.3 vision, and 461m for 20/10 vision. For DJI Mavic Pro, at an altitude of 150m, the average identification distance was 167m for 20/20 vision, 199m for 20/13.3 vision, and 242m for 20/10 vision. At an altitude of 100m, the average identification distance was 171m for 20/20 vision, 208m for 20/13.3 vision, and 253m for 20/10 vision. At an altitude of 50m, the average identification distance was 158m for 20/20 vision, 195m for 20/13.3 vision, and 249m for 20/10 vision.
The test results for Recognition distances based on flight altitude and eyesight are presented in Table 6. For fixed-wing aircraft, a total of 10 flights were conducted for the RemoEye-002B. The recognizable range for RemoEye-002B was found to be a maximum of 1,335 meters (eyesight 20/10) at an altitude of 150 meters. The average recognition distance at an altitude of 150 meters, based on eyesight, was 968 meters for 20/20 vision, 975 meters for 20/13.3 vision, and 1,249 meters for 20/10 vision. At an altitude of 100 meters, the average recognition distance based on eyesight was 889 meters for 20/20 vision, 964 meters for 20/13.3 vision, and 1,180 meters for 20/10 vision. At an altitude of 50 meters, the average recognition distance based on eyesight was 728 meters for 20/20 vision, 768 meters for 20/13.3 vision, and 872 meters for 20/10 vision.
For multi-copter aircraft, a total of 6 flights were conducted for the XD-I4T and 6 flights for the XD-X8S. The recognizable range for XD-I4T at an altitude of 150 meters was found to be a maximum of 1,506 meters (eyesight 20/10), while XD-X8S at the same altitude had a recognizable range of up to 2,000 meters (eyesight 20/10). For XD-I4T at an altitude of 150 meters, the average recognition distance based on eyesight was 1,504 meters for 20/20 vision, 1,504 meters for 20/13.3 vision, and 1,504 meters for 20/10 vision. At an altitude of 100 meters, the average recognition distance based on eyesight was 1,059 meters for 20/20 vision, 1,076 meters for 20/13.3 vision, and 1,168 meters for 20/10 vision. At an altitude of 50 meters, the average recognition distance based on eyesight was 755 meters for 20/20 vision, 738 meters for 20/13.3 vision, and 835 meters for 20/10 vision. For XD-X8S at an altitude of 150 meters, the average recognition distance based on eyesight was 1,750 meters for 20/20 vision, 1,850 meters for 20/13.3 vision, and 1,850 meters for 20/10 vision. At an altitude of 100 meters, the average recognition distance based on eyesight was 1,600 meters for 20/20 vision, 1,600 meters for 20/13.3 vision, and 1,800 meters for 20/10 vision. At an altitude of 50 meters, the average recognition distance based on eyesight was 870 meters for 20/20 vision, 869 meters for 20/13.3 vision, and 1,186 meters for 20/10 vision.
For the DJI Inspire 2, a total of 6 flights were conducted. At an altitude of 150 meters, the recognition distance for the DJI Inspire 2 was found to be a maximum of 1,150 meters (eyesight 20/10) when at an altitude of 100 meters. For the DJI Inspire 2 at an altitude of 150 meters, the average recognition distance based on eyesight was 725 meters for 20/20 vision, 979 meters for 20/13.3 vision, and 979 meters for 20/10 vision. At an altitude of 100 meters, the average recognition distance based on eyesight was 825 meters for 20/20 vision, 1,006 meters for 20/13.3 vision, and 1,031 meters for 20/10 vision. At an altitude of 50 meters, the average recognition distance based on eyesight was 527 meters for 20/20 vision, 527 meters for 20/13.3 vision, and 569 meters for 20/10 vision.
The reason for the different flight frequencies for each aircraft in this study is as follows. The communication equipment of the drones used in the flight tests operates in the ISM band, and the available output of ISM band communication equipment is regulated by radio laws in Korea to be 10mW or less. At times, there were challenges in conducting flight tests because the communication range was shorter than the observer's recognition distance. Additionally, abnormal situations such as fail-safe operations due to communication loss and drone loss during flight occurred, leading to variations in the number of flights for each test.
3.2. Lighting device test results
Table 7 presents the results of the ground lighting device distance test. The identification distance of the lighting devices varied depending on the observer's eyesight, with better eyesight allowing identification from a greater distance. Importantly, for the consideration of safety in flight operations, the results are based on an observer's eyesight of 20/20. The results for 20/20 eyesight showed that products identifiable at the maximum set distance of 1,100 meters were STROBE LIGHT and MATEKSYS. Colors WHITE and RED were identifiable at distances exceeding 1,000 meters, while BLUE was measured at approximately 700 meters.
Therefore, the STROBE LIGHT and MATEKSYS lighting products were attached to the drone for nighttime lighting observation distance tests.
3.3. Night Flight Test result
The results of the night flight altitude and observer's eyesight recognition distances are shown in Table 8.
For fixed-wing aircraft, a total of 11 flights were conducted for the RemoEye-002B. The visible light recognition distance for the RemoEye-002B was found to be a maximum of 607 meters (eyesight 20/10) at an altitude of 150 meters. The average light recognition distance based on eyesight at 150 meters was 314 meters for 20/20 vision, 500 meters for 20/13.3 vision, and 565 meters for 20/10 vision. At an altitude of 100 meters, the average light recognition distance based on eyesight was 255 meters for 20/20 vision, 516 meters for 20/13.3 vision, and 535 meters for 20/10 vision. At an altitude of 50 meters, the average light recognition distance based on eyesight was 281 meters for 20/20 vision, 485 meters for 20/13.3 vision, and 529 meters for 20/10 vision.
For the Parrot Disco, a total of 11 flights were conducted. The visible light recognition distance for the Parrot Disco was 1,000 meters at altitudes of 150 meters and 100 meters for all levels of eyesight. At an altitude of 50 meters, the average light recognition distance based on visual acuity was 876 meters for 20/20 vision, 985 meters for 20/13.3 vision, and 926 meters for 20/10 vision.
For multi-copter aircraft, 8 flights were conducted for XD-I4T and 9 flights for XD-X8S. The light recognition distance for XD-I4T at an altitude of 50 meters was a maximum of 1,018 meters (eyesight 20/10). For XD-X8S at altitudes between 50 and 150 meters, the maximum recognition distance was 1,000 meters for all levels of eyesight. For XD-I4T at an altitude of 150 meters, the average light recognition distance was 978 meters for all levels of eyesight. At an altitude of 100 meters, the average recognition distance for all levels of eyesight was 1,008 meters. At an altitude of 50 meters, the average light recognition distance based on eyesight was 916 meters for 20/20 vision, 935 meters for 20/13.3 vision, and 1011 meters for 20/10 vision.
For XD-X8S at an altitude of 150 meters, the average light recognition distance was 982 meters for 20/20 vision, and 1,000 meters for 20/13.3 and 20/10 vision. At an altitude of 100 meters, the average recognition distance was 778 meters for 20/20 vision, 819 meters for 20/13.3 vision, and 826 meters for 20/10 vision. At an altitude of 50 meters, the average recognition distance for all levels of eyesight was 852 meters.
4. Conclusions
This research aims to establish data on physical night flight and visual flight distances through flight tests and to provide experimental criteria for operational procedures for night and BVLOS flights. To achieve this goal, two fixed-wing industrial drones, two multi-copters for leisure, and two industrial multi-copters were utilized for day and night flight tests. The flight altitudes were set at 150m, 100m, and 50m, and observers were divided into three groups based on eyesight: 20/20, 20/13.3, and 20/10.
In the identification state, the operator can control the drone, and the observer can monitor it. However, in the recognition state, both the operator and the observer cannot confirm the drone's status, and the operator cannot effectively control it.
Table 9 presents the compiled data for Identification criteria based on a minimum visual acuity of 20/20 to establish experimental drone safety standards.
There is a tendency for identification distances to increase with larger aircraft size and higher altitudes. However, it was observed that at an altitude of 150 meters, XD-X8S, DJI Inspire 2, and DJI Mavic Pro showed results where they were visible at a greater distance at 100 meters than at 150 meters. This suggests that there may be factors beyond the variables of drone size, altitude, and eyesight to consider.
In the case of recognition distance tests, smooth testing was challenging due to the limitations of the operating range of communication equipment. In South Korea, the output for the ISM bands 2.4GHz and 5.8GHz is regulated to be 10mW or less. As a result, some test drones had communication ranges shorter than the recognition distance, leading to the activation of the fail-safe function. Furthermore, in the night flight tests, for the RemoEye-002B, the attachment location was arbitrarily determined based on the drone's structure. When compared to other aircraft, the results appeared to show shorter distances.
Figure 8 presents the experimental criteria for VLOS and BVLOS flight based on this study. It suggests establishing a boundary where the area within the identification distance is considered the VLOS area, and beyond that is designated as the BVLOS flight area. This proposal is based on the fact that the identification distance allows the operator to confirm the drone's status and respond immediately in the event of an abnormal condition.
Figure 9 illustrates the operational method for observers during BVLOS and night flights. By positioning observers within the identification distance, and ensuring that at least two individuals can identify the drone's flight status, safe flights can be achieved.
Author Contributions
Conceptualization, G.B. Kim; Methodology, G.B. Kim and J.H. Jin; Data collection, J.H. Jin; Writing—review and editing, G.B. Kim, I.J. Cho and H.J. Choi; Visualization, I.J. Cho; project administration, J.H. Jin; All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by "Regional Innovation Strategy (RIS)" through the National Research Foundation of Korea(NRF) funded by the Ministry of Education(MOE)(2023RIS-005)
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Park, J. Y. Drone Technology for Inspection and Diagnosis of Overhead Power Transmission Lines. World of electricity. 2020, Vol.69, No.04.
- Hong, T. C.; Lee, B. S. 5G Technology for Autonomous Flight of Drone at Non-Visual Line of Sight, In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (18 November 2020).; pp.857-858.
- Ryu, S.H.; Park, J.Y.; Kim, S.T; Lee, J.K․; Ko,B.S.; Woo, J.W. Development of a Beyond Visual Line of Sight Drone System for Inspection of Transmission Lines, The Transactions of the Korean Institute of Electrical Engineers. 2022, Vol. 71, No. 7, pp .993~1001. [CrossRef]
- Park, J.K.; Um, D. Y.; Evaluation of Accuracy and Utilization of the Drone Photogrammetry for Open-pit Mine Monitoring. Journal of Digital Convergence 2019, 17(12), 191-196. [CrossRef]
- Shin, D.Y; Kim, D.J.S.; Kim, S.S; Han, Y.K.; Nho, H.J. A Study on the Use of Drones for Disaster Damage Investigation in Mountainous Terrain. Korean Journal of Remote Sensing 2020, 36(5), 1209-1220. [CrossRef]
- Scholz, S. S.; Wähnert, D.; Jansen, G.; Sauzet, O.; Latka, E.; Rehberg, S.; Thies, K. C. AED delivery at night - Can drones do the Job? A feasibility study of unmanned aerial systems to transport automated external defibrillators during night-time. Resuscitation 2023, 185, 109734. [CrossRef]
- Kim, H. W.; Kim, D. H. Trends on Standardization Activities for the Minimum Operation Performance of Cellular Based UTM Communications. In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (11 November 2021).; pp.1408-1409.
- Oh, G. R. Trends in Development of UTM Service Provision and Airspace Integration Technology. Aerospace Industry Technology Trend 2019, Vol.17, No. 02, 39-44.
- Kim, D. H.; Kang, G. S. ; Kim, H.W.; Hong, T.CH. A Study on Requirements and Performance quality analysis of Communication for UTM. In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (18 November 2020); pp. 715-716.
- JOUAV. Night Vision Drone: Most Comprehensive Guide in 2023. Available online: https://www.jouav.com/blog/night-vision-drone.html (accessed on 09 Dec. 2023).
- J.MARPLE. Drones Achieve LiDAR Positioning in No-GPS Environments. Available online: https://jmarple.ai/introducing-lidar-positioning-system-in-small-drones/ (accessed on 09 Dec. 2023).
- Hong, T.CH.; Kim, D.H. Analysis of reliability requirements of drone communication in the Unmanned Aircraft System(UAS) Traffic Management(UTM) system. In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (18 November 2020).; pp.855-856.
- Jang, S. W.; Kwon, T. H. A Study on the Development of FAA UAM ConOps from Airspace Integration Perspective. In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (16 November 2022).; pp .671-672.
- Yoon, T. K.; Kim, S. H. Re-balancing : Tactical Strategy for Efficient UAM Operation. In Proceedings of Aeronautical and Space Sciences Conference, Jeju, Korea, (16 November 2022).; pp. 134-135.
- Lee, S. M.; Eun, Y. J.; Jeon, D. G. Research Trends in UAM Traffic Management: Focused on Studies of NASA. Aerospace Industry Technology Trend 2022, Vol.20, No.01, 55-64.
- Nicolas, R.; Sylvain, B.; Stéphanie. L.; Baptiste. L. DROSERA: A DROne Simulation Environment for Risk Assessment. Proceedings of the 31st European Safety and Reliability Conference, Sep 2021, Angers, France.; pp.354-361.
- LAW. Aviation Safety Act Enforcement Rule Article 310. Available online: https://www.law.go.kr/%EB%B2%95%EB%A0%B9/%ED%95%AD%EA%B3%B5%EC%95%88%EC%A0%84%EB%B2%95%EC%8B%9C%ED%96%89%EA%B7%9C%EC%B9%99 (accessed on 12 May 2023).
- Lim, G.Ch. (2019). Review on the Act on the Promotion and Foundation of Drone Utilization and the Safety Requirements of Drone on the Aviation Safety Act. The Journal of Comparative Law 2019, 19(3), 209-253.
- Park, S.H. Review of Legislation for Non-visible Drone Flight. Asia-pacific Journal of Convergent Research Interchange 2021, Vol.7, No.8, 311-320.
- Jeong, S.CH.; Vinayagam, M.; Cha. J.S. Unmanned Drones flying device and the Aviation Act and other local law to limit problems. Journal of Satellite, Information and Communication 2017, 12(1), 58-63.
- Lee, Ch.K. A Study of drone's beyond visual line of sight- Focusing on revision plan of special flight standard of unmanned aerial vehicle. Cnulawreview 2018, 38(3), 209-235.
- mmar, M.; Hartwig, H. Analyzing the violation of drone regulations in three VGI drone portals across the US, the UK, and France, Geo-spatial Information Science 2022, Published Online. [CrossRef]
- DRONE INFORMATION PORTAL. What is special flight approval for unmanned aerial vehicles? Available online: https://www.droneportal.or.kr/subList/20000000068 (accessed on 12 May. 2023).
- Kim, G.B.; Cho. I. J.; Jin. J.H. BVLOS Flight Safety Criteria Proposal Based on VLOS Range Flight Test. J. of Advanced Engineering and Technology 2022, 15(4), 195-200.
- Li, K.W.; Sun, C.; Li, N. Distance and Visual Angle of Line-of-Sight of a Small Drone. Appl. Sci. 2020, 10, 5501. [CrossRef]
Figure 1.
IR camera image and Thermal camera image from drone.

Figure 2.
Drones Positioning system with LiDAR in No-GPS Environments.

Figure 3.
Daegu unmanned aerial vehicle demonstration area, Korea.
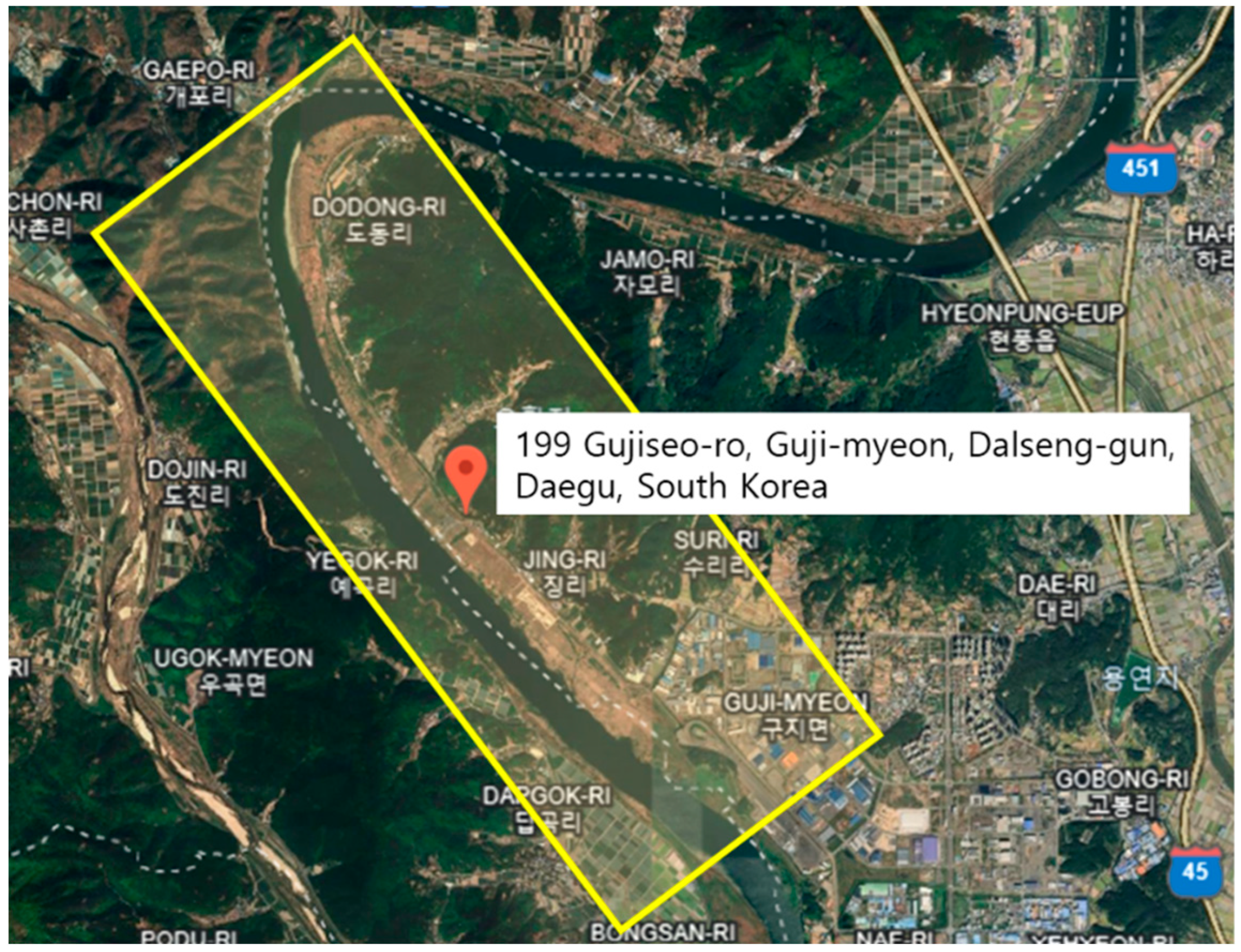
Figure 4.
VLOS Observer Judgment Criterion.

Figure 5.
VLOS Flight test overview
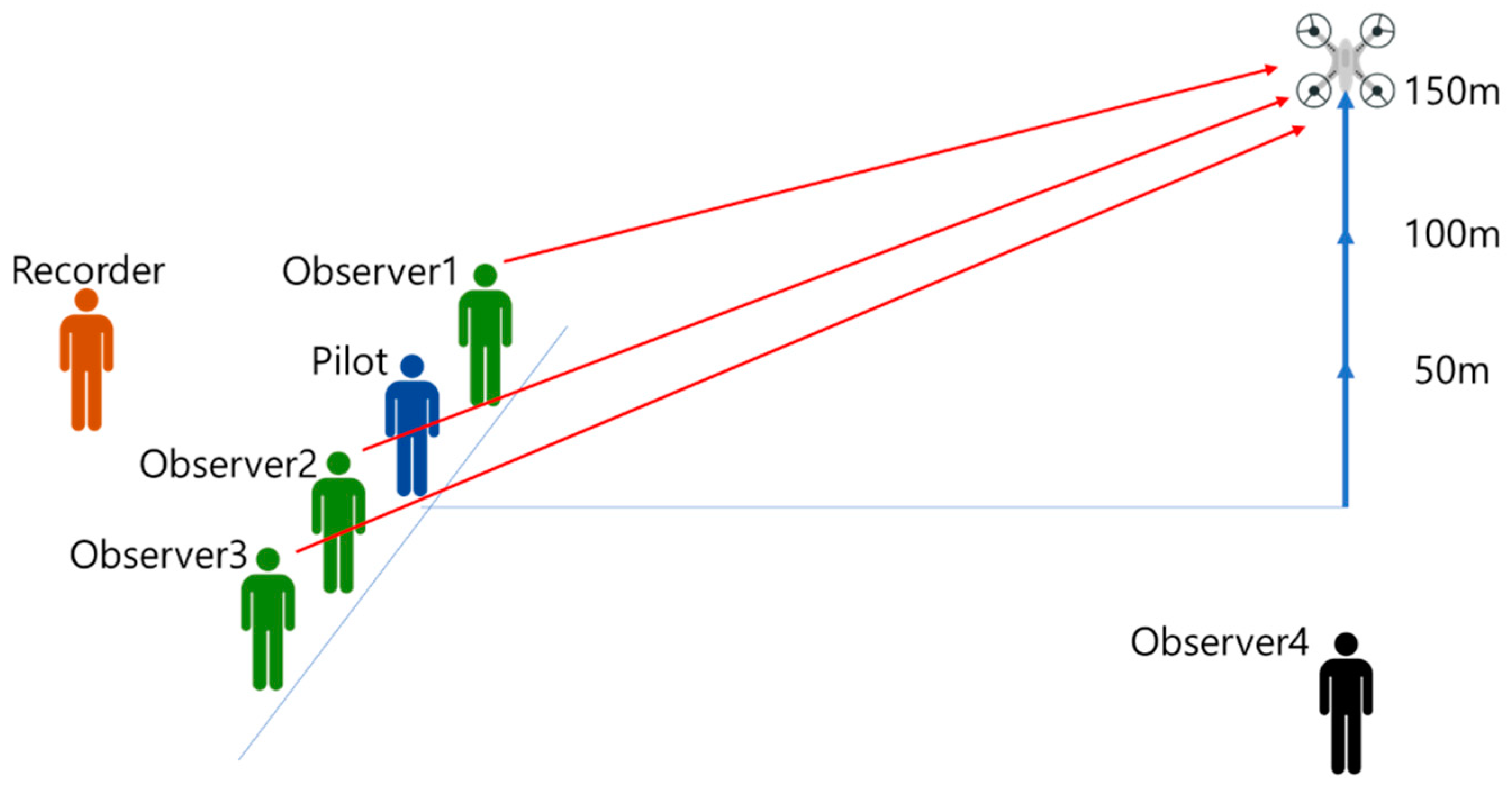
Figure 6.
Light devices range test.
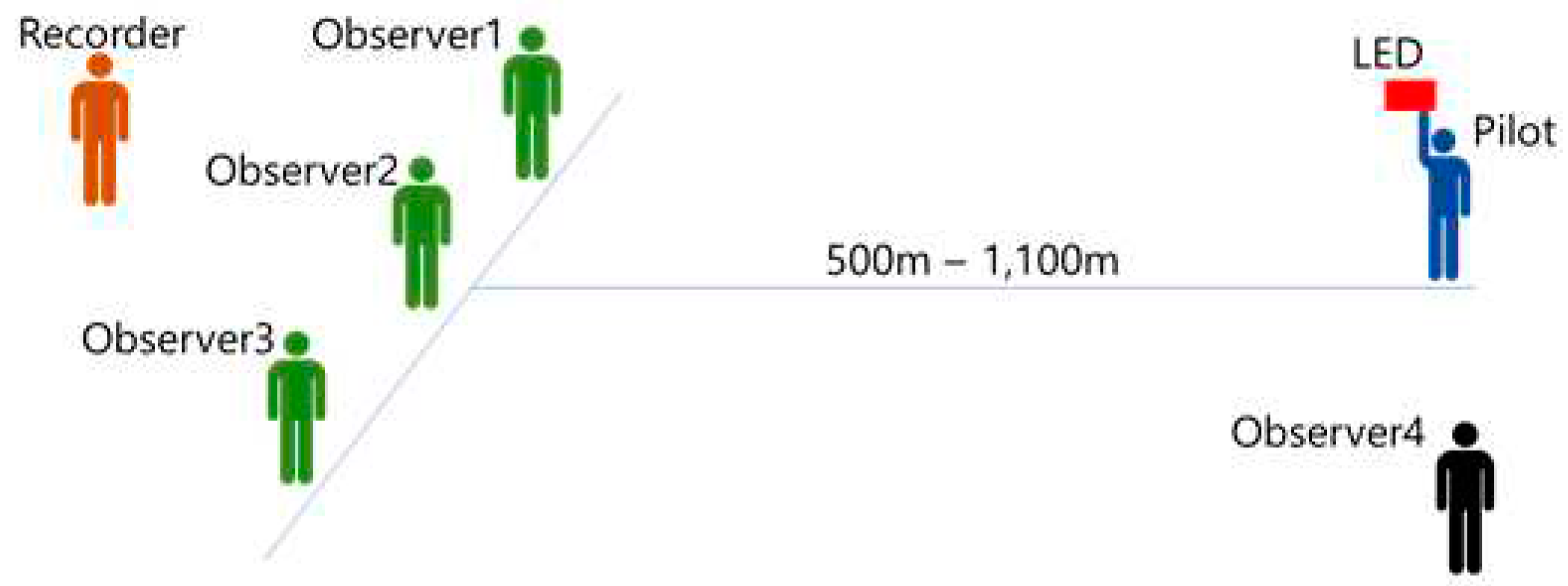
Figure 7.
Night Flight test overview.
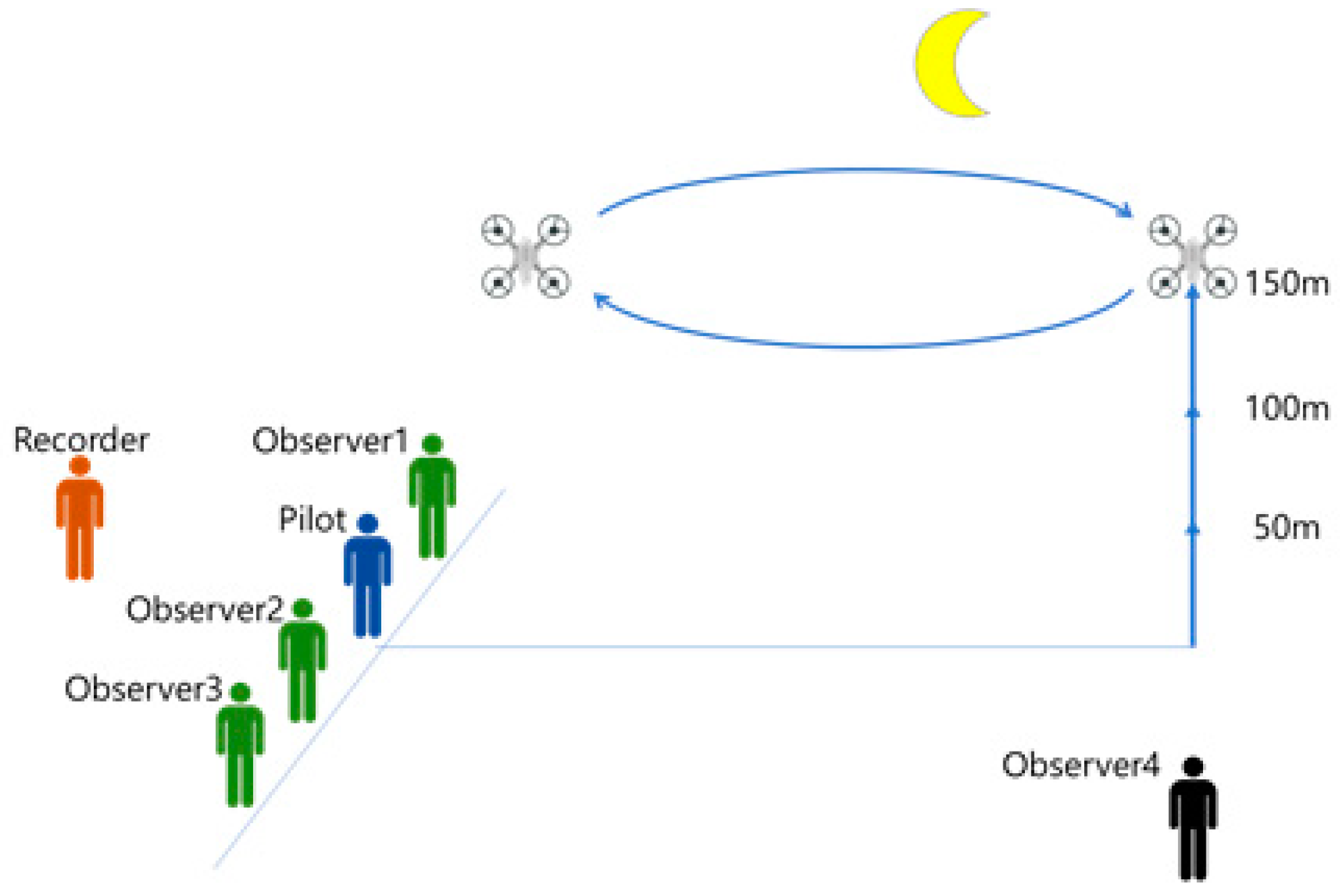
Figure 8.
BVLOS Operation Judgment Criterion.
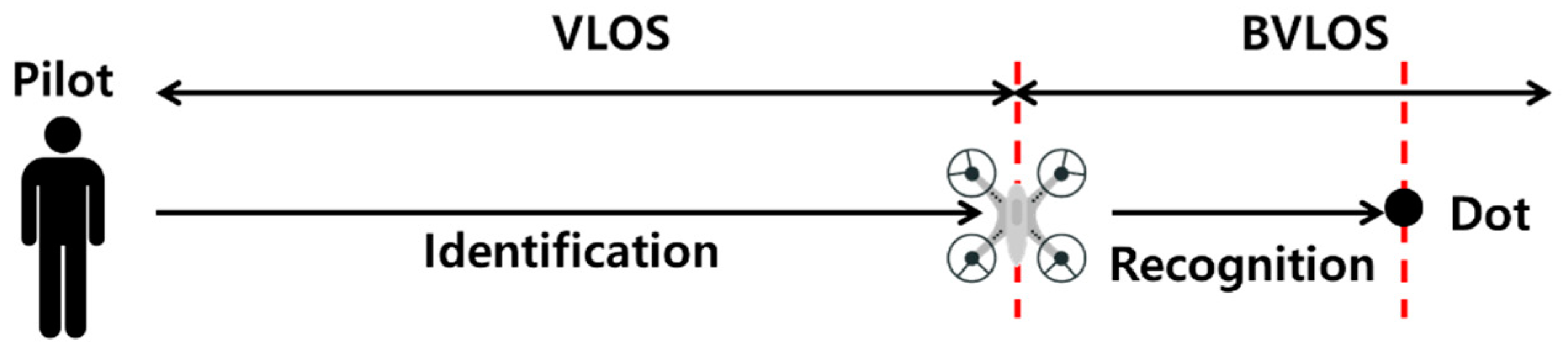
Figure 9.
The observer operation of BVLOS and night flight test.
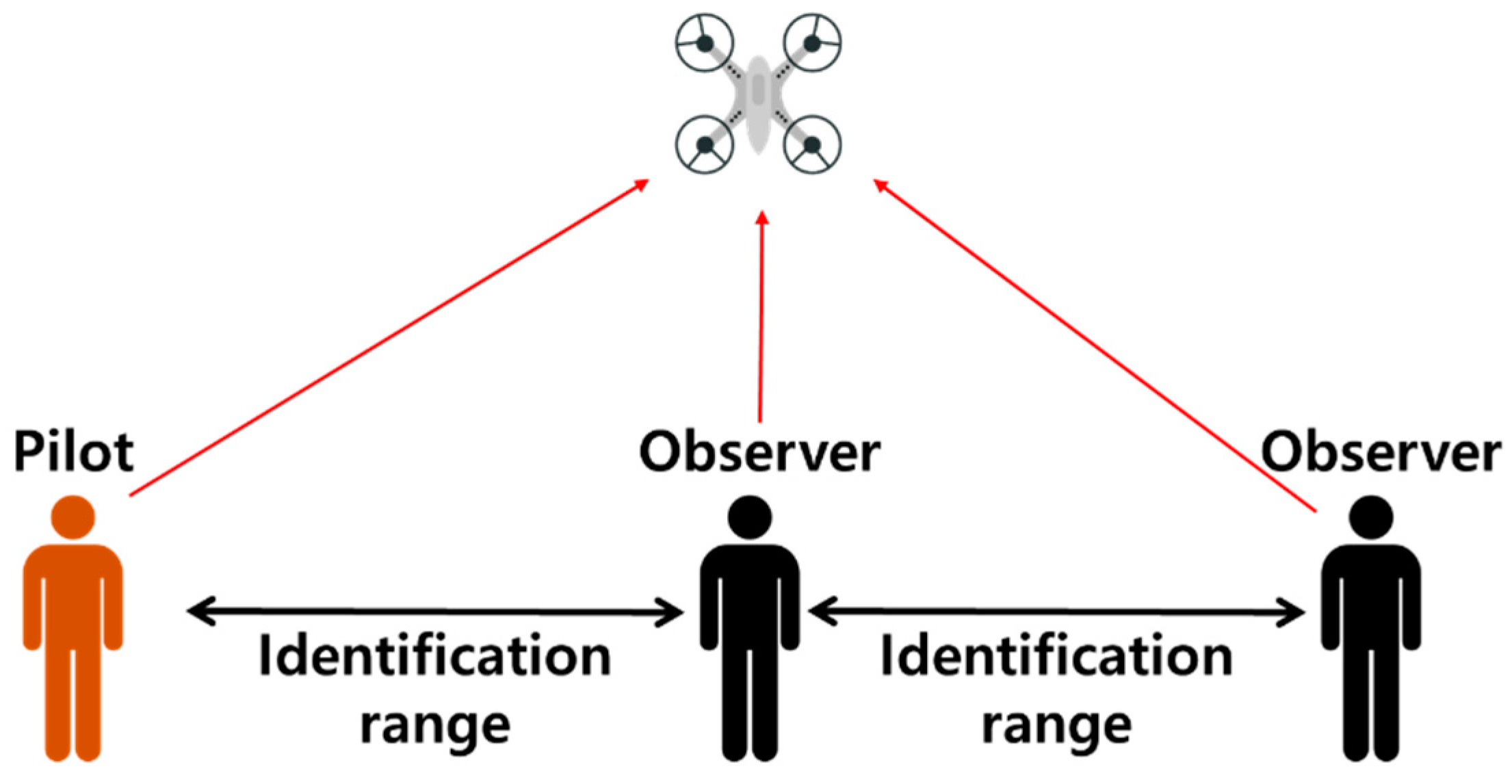

Table 1.
Requirement of Safety standards and approval procedures for special flights of unmanned aerial vehicles [Appendix 1].
Table 1.
Requirement of Safety standards and approval procedures for special flights of unmanned aerial vehicles [Appendix 1].
| Classification | Contents | |
|---|---|---|
| Common matters | · Obstacles in take-off/landing and flight paths must not affect flight safety. · Equipped with an automatic safety device (Fail-Safe). · Equipped with anti-collision function. · Equipped with a separate GPS location transmitter to transmit location information in case of a fall. · Prepare and keep an emergency situation manual including an emergency contact and reporting system for accident response, and all participating personnel must receive emergency situation training in preparation for an emergency situation. |
|
| Individual matters | Night Flight | · At least one observer must be deployed to check the UAV when flying at night. · Equipped with anti-collision lights that can be recognized from a distance of 5 km · The anti-collision light is a continuous lighting type and is installed in a location where the front, rear, left and right sides can be identified. · Equipped with automatic flight mode · Equipped with visual aids (FPV) using infrared cameras · Equipped with ground lighting facilities and searchlights for take-off/landing areas |
| BVLOS | · When flying beyond the visual field of the pilot, at least one observer who can check the unmanned aerial vehicle must be placed on the planned flight path. · Communication must be possible between the pilot and the observer so that the unmanned aerial vehicle can be operated smoothly. · The pilot must check the pre-planned flight and route, and the unmanned aerial vehicle must be capable of manual/automatic/semi-automatic flight. · The pilot must check in advance whether CCC (Command and Control, Communication) equipment can be used within the planned flight range. · UAVs must be programmed for flight plans and emergency profiles. · The unmanned aerial vehicle must be able to notify the operator when a system error occurs. · Communication (RF communication and LTE communication backbone use, etc.) is redundant. · Equipped with GCS notification and external operator notification when displaying the status of the unmanned aerial vehicle on the GCS (Ground Control System) and when an error occurs. · Equipped with Visual Assistance Device (FPV). |
|
Table 2.
VLOS and night Flight test aircraft specifications.
| Classification | Manufacturer | Aircraft | Size(W×L×H) Propeller included | Manufacturing country |
|---|---|---|---|---|
| Fixed wing | Uconsystems | RemoEye-002B
|
1,800mm×1,440mm ×300mm |
Korea |
Parrot Disco
|
1,150mm×580mm×120mm | |||
| Multicopter | Xdrone | XD-X8S
|
1,520mm×1,520mm×750mm | Korea |
XD-I4T |
1,414mm×1,414mm×890mm | |||
| Multicopter | DJI (only VLOS test) |
DJI Inspire 2
|
820mm×800mm×420mm | China |
DJI Mavic pro
|
480mm×430mm×85mm |
Table 3.
Night flight lighting product.
| No | Product Name | Photo | Color | Voltage (V) | Current (A) |
|---|---|---|---|---|---|
| 1 | STROBE LIGHT (CE certified) |
 |
WHITE | 5 | 0.80 |
| RED | 5 | 0.80 | |||
| BLUE | 5 | 0.80 | |||
| 2 | LED (WS2812B) |

|
WHITE | 5 | 0.29 |
| 3 | LED (5050) |
 |
WHITE | 12 | 0.07 |
| RED | 12 | 0.02 | |||
| BLUE | 12 | 0.02 | |||
| 4 | RGBARM-16 |  |
WHITE | 15 | 0.10 |
| RED | 15 | 0.04 | |||
| BLUE | 15 | 0.03 | |||
| 5 | COB LED |  |
WHITE | 15 | 0.09 |
| RED | 15 | 0.08 | |||
| BLUE | 15 | 0.09 |
Table 4.
Night flight test drones and location of lighting equipment within the aircraft.
| Type | Product Name | Color and position of light device |
|---|---|---|
| Fixed wing | RemoEye-002B | Front / Red |
| Parrot Disco | Rear / White | |
| Multicopter | XD-X8S | Rear / White |
| XD-I4T | Rear / White |
Table 5.
Identification distance results based on flight altitude and observer's eyesight.
| Aircraft | Altitude (m) | Eyesight | Min. distance (m) | Max. distance (m) | Avg. distance (m) |
|---|---|---|---|---|---|
| RemoEye-002B | 150 | 20/20 | 361 | 709 | 577 |
| 20/13.3 | 483 | 821 | 619 | ||
| 20/10 | 605 | 938 | 715 | ||
| 100 | 20/20 | 376 | 637 | 526 | |
| 20/13.3 | 440 | 620 | 553 | ||
| 20/10 | 515 | 833 | 654 | ||
| 50 | 20/20 | 357 | 517 | 418 | |
| 20/13.3 | 405 | 571 | 459 | ||
| 20/10 | 469 | 642 | 547 | ||
| Parrot Disco | 150 | 20/20 | 443 | 500 | 477 |
| 20/13.3 | 443 | 603 | 511 | ||
| 20/10 | 541 | 641 | 584 | ||
| 100 | 20/20 | 364 | 418 | 398 | |
| 20/13.3 | 368 | 453 | 415 | ||
| 20/10 | 436 | 517 | 471 | ||
| 50 | 20/20 | 327 | 440 | 373 | |
| 20/13.3 | 364 | 448 | 403 | ||
| 20/10 | 410 | 550 | 483 | ||
| XD-I4T | 150 | 20/20 | 453 | 582 | 504 |
| 20/13.3 | 571 | 773 | 681 | ||
| 20/10 | 652 | 869 | 787 | ||
| 100 | 20/20 | 431 | 584 | 498 | |
| 20/13.3 | 596 | 966 | 688 | ||
| 20/10 | 695 | 1037 | 781 | ||
| 50 | 20/20 | 398 | 521 | 474 | |
| 20/13.3 | 487 | 598 | 538 | ||
| 20/10 | 521 | 654 | 582 | ||
| XD-X8S | 150 | 20/20 | 271 | 600 | 457 |
| 20/13.3 | 542 | 694 | 616 | ||
| 20/10 | 645 | 783 | 708 | ||
| 100 | 20/20 | 338 | 681 | 511 | |
| 20/13.3 | 530 | 728 | 631 | ||
| 20/10 | 591 | 810 | 710 | ||
| 50 | 20/20 | 389 | 616 | 484 | |
| 20/13.3 | 520 | 724 | 610 | ||
| 20/10 | 570 | 816 | 674 | ||
| DJI Inspire 2 | 150 | 20/20 | 210 | 372 | 288 |
| 20/13.3 | 349 | 603 | 420 | ||
| 20/10 | 426 | 698 | 512 | ||
| 100 | 20/20 | 220 | 409 | 321 | |
| 20/13.3 | 342 | 550 | 435 | ||
| 20/10 | 460 | 650 | 526 | ||
| 50 | 20/20 | 213 | 400 | 313 | |
| 20/13.3 | 288 | 461 | 399 | ||
| 20/10 | 368 | 538 | 461 | ||
| DJI Mavic Pro | 150 | 20/20 | 124 | 246 | 167 |
| 20/13.3 | 134 | 250 | 199 | ||
| 20/10 | 164 | 290 | 242 | ||
| 100 | 20/20 | 129 | 196 | 171 | |
| 20/13.3 | 165 | 234 | 208 | ||
| 20/10 | 209 | 291 | 253 | ||
| 50 | 20/20 | 103 | 249 | 158 | |
| 20/13.3 | 159 | 248 | 195 | ||
| 20/10 | 174 | 310 | 249 |
Table 6.
Recognition distance results based on flight altitude and observer's eyesight.
| Aircraft | Altitude (m) | Eyesight | Min. distance (m) | Max. distance (m) | Avg. distance (m) |
|---|---|---|---|---|---|
| RemoEye-002B | 150 | 20/20 | 902 | 1,000 | 968 |
| 20/13.3 | 923 | 1,015 | 975 | ||
| 20/10 | 1,103 | 1,335 | 1,249 | ||
| 100 | 20/20 | 793 | 1,053 | 889 | |
| 20/13.3 | 872 | 1,052 | 964 | ||
| 20/10 | 1,134 | 1,266 | 1,180 | ||
| 50 | 20/20 | 666 | 789 | 728 | |
| 20/13.3 | 759 | 776 | 768 | ||
| 20/10 | 863 | 880 | 872 | ||
| XD-I4T | 150 | 20/20 | 1,502 | 1,506 | 1,504 |
| 20/13.3 | 1,502 | 1,506 | 1,504 | ||
| 20/10 | 1,502 | 1,506 | 1,504 | ||
| 100 | 20/20 | 1,013 | 1,105 | 1,059 | |
| 20/13.3 | 1,047 | 1,105 | 1,076 | ||
| 20/10 | 1,126 | 1,209 | 1,168 | ||
| 50 | 20/20 | 730 | 779 | 755 | |
| 20/13.3 | 727 | 748 | 738 | ||
| 20/10 | 822 | 847 | 835 | ||
| XD-X8S | 150 | 20/20 | 1,700 | 1,800 | 1,750 |
| 20/13.3 | 1,700 | 2,000 | 1,850 | ||
| 20/10 | 1,700 | 2,000 | 1,850 | ||
| 100 | 20/20 | 1,600 | 1,600 | 1,600 | |
| 20/13.3 | 1,600 | 1,600 | 1,600 | ||
| 20/10 | 1,800 | 1,800 | 1,800 | ||
| 50 | 20/20 | 830 | 920 | 870 | |
| 20/13.3 | 826 | 950 | 869 | ||
| 20/10 | 859 | 1,400 | 1,186 | ||
| DJI Inspire 2 | 150 | 20/20 | 600 | 850 | 725 |
| 20/13.3 | 957 | 1000 | 979 | ||
| 20/10 | 957 | 1000 | 979 | ||
| 100 | 20/20 | 800 | 850 | 825 | |
| 20/13.3 | 912 | 1,100 | 1,006 | ||
| 20/10 | 912 | 1,150 | 1,031 | ||
| 50 | 20/20 | 500 | 554 | 527 | |
| 20/13.3 | 500 | 554 | 527 | ||
| 20/10 | 500 | 637 | 569 |
Table 7.
Results of recognition by lighting (LED) product.
| Product | Color | Distance (m) | Recognition availability | ||
|---|---|---|---|---|---|
| Eyesight 20/20 | Eyesight 20/13.3 | Eyesight 20/10 | |||
| STROBE LIGHT | WHITE | 1,100 | ○ | ○ | ○ |
| RED | 1,100 | △ | ○ | ○ | |
| 1,000 | ○ | ○ | ○ | ||
| BLUE | 1,100 | △ | ○ | ○ | |
| 1,000 | △ | ○ | ○ | ||
| 900 | △ | ○ | ○ | ||
| 800 | △ | ○ | ○ | ||
| 700 | ○ | ○ | ○ | ||
| LED(WS2812B) | WHITE | 1,100 | △ | ○ | ○ |
| 1,000 | ○ | ○ | ○ | ||
| LED(5050) | WHITE | 1,100 | △ | ○ | ○ |
| 1,000 | △ | ○ | ○ | ||
| 900 | ○ | ○ | ○ | ||
| RED | 1,100 | X | X | X | |
| 1,000 | X | X | X | ||
| 900 | X | X | X | ||
| BLUE | 1,100 | X | ○ | ○ | |
| 1,000 | X | ○ | ○ | ||
| 900 | X | ○ | ○ | ||
| 800 | X | ○ | ○ | ||
| 700 | X | ○ | ○ | ||
| 600 | △ | ○ | ○ | ||
| 500 | ○ | ○ | ○ | ||
| MATEKSYS(RGBARM-16) | WHITE | 1,100 | ○ | ○ | ○ |
| RED | 1,100 | ○ | ○ | ○ | |
| BLUE | 1,100 | X | ○ | ○ | |
| 1,000 | X | ○ | ○ | ||
| 900 | X | ○ | ○ | ||
| 800 | X | ○ | ○ | ||
| 700 | △ | ○ | ○ | ||
| 600 | △ | ○ | ○ | ||
| 500 | ○ | ○ | ○ | ||
| COB LED | WHITE | 1,100 | X | X | X |
| 1,000 | ○ | ○ | ○ | ||
| RED | 1,100 | X | X | X | |
| 1,000 | ○ | ○ | ○ | ||
* Indication of recognition availability : ○(possible), △(Suspension of judgment), X(impossible).
Table 8.
Recognition distance results based on night flight altitude and observer's eyesight.
| Aircraft | Altitude (m) | Eyesight | Min. distance (m) | Max. distance (m) | Avg. distance (m) |
|---|---|---|---|---|---|
| RemoEye-002B | 150 | 20/20 | 177 | 511 | 314 |
| 20/13.3 | 429 | 525 | 500 | ||
| 20/10 | 509 | 607 | 565 | ||
| 100 | 20/20 | 200 | 327 | 255 | |
| 20/13.3 | 487 | 552 | 516 | ||
| 20/10 | 487 | 595 | 535 | ||
| 50 | 20/20 | 255 | 306 | 281 | |
| 20/13.3 | 465 | 505 | 485 | ||
| 20/10 | 516 | 541 | 529 | ||
| Parrot Disco | 150 | 20/20 | 1000 | 1000 | 1000 |
| 20/13.3 | 1000 | 1000 | 1000 | ||
| 20/10 | 1000 | 1000 | 1000 | ||
| 100 | 20/20 | 1000 | 1000 | 1000 | |
| 20/13.3 | 1000 | 1000 | 1000 | ||
| 20/10 | 1000 | 1000 | 1000 | ||
| 50 | 20/20 | 664 | 1000 | 876 | |
| 20/13.3 | 915 | 1000 | 985 | ||
| 20/10 | 915 | 1000 | 986 | ||
| XD-I4T | 150 | 20/20 | 925 | 1005 | 978 |
| 20/13.3 | 925 | 1005 | 978 | ||
| 20/10 | 925 | 1005 | 978 | ||
| 100 | 20/20 | 1003 | 1014 | 1009 | |
| 20/13.3 | 1003 | 1014 | 1009 | ||
| 20/10 | 1003 | 1014 | 1009 | ||
| 50 | 20/20 | 870 | 1006 | 916 | |
| 20/13.3 | 880 | 1006 | 935 | ||
| 20/10 | 1006 | 1018 | 1011 | ||
| XD-X8S | 150 | 20/20 | 947 | 1000 | 982 |
| 20/13.3 | 1000 | 1000 | 1000 | ||
| 20/10 | 1000 | 1000 | 1000 | ||
| 100 | 20/20 | 257 | 1000 | 778 | |
| 20/13.3 | 275 | 1000 | 819 | ||
| 20/10 | 305 | 1000 | 826 | ||
| 50 | 20/20 | 659 | 1000 | 852 | |
| 20/13.3 | 659 | 1000 | 852 | ||
| 20/10 | 659 | 1000 | 852 |
Table 9.
Eyesight 20/20 Average Identification distance by aircraft size and altitude.
| Aircraft | Dimension | Altitude 150m | Altitude 100m | Altitude 50m |
|---|---|---|---|---|
| RemoEye-002B | 1,800mm×1,440mm×300mm | 577 | 526 | 418 |
| Parrot Disco | 1,150mm×580mm×120mm | 477 | 398 | 373 |
| XD-I4T | 1,520mm×1,520mm×750mm | 504 | 498 | 474 |
| XD-X8S | 1,414mm×1,414mm×890mm | 457 | 511 | 484 |
| DJI Inspire 2 | 820mm×800mm×420mm | 288 | 321 | 313 |
| DJI Mavic Pro | 480mm×430mm×85mm | 167 | 171 | 158 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



