
Submitted:
22 January 2024
Posted:
22 January 2024
You are already at the latest version
Abstract
Industry 4.0 is in continuous technological growth that benefits all sectors of industry and society in general. This article reviews the concept of Digital Twin (DT) and the interest of its application in photovoltaic installations. A comparison is made on how other authors use the DT approach in photovoltaic installations to improve the efficiency of the renewable energy generated and consumed, the energy prediction and the reduction of the operation and maintenance costs of the photovoltaic installation. It is reviewed how, by providing real-time data and analysis, DTs enable more informed decisions in the solar energy sector. The objectives of the review are to study the digital twin technology and to analyze its application and implementation in photovoltaic systems.
Keywords:
Industry 4.0
; digital Twin (DT)
; review
; photovoltaic installations
; renewable energy
1. Introduction
Today's society is undergoing some major changes due to the rapid and massive technological growth that has taken place in recent years. The advent of Industry 4.0 and the increasing availability of data and computing power are some of the causes of this societal transformation [1]. For example, manufacturing industries around the world, such as those in the United States, United Kingdom, Germany, or even other countries like Italy, have come up with their own national strategies for the development of industrial production [2]. The most basic technological drivers are digitalization and intelligence. One of the most useful tools brought by these developments are digital twins. Digital twins can provide services in many areas of this new smart manufacturing trend and serve as a connecting interface between the real world and the digital or information world. In addition, they can provide such intelligent services as efficient real-time response [3]. The concept of digital twins has been around for several decades, but in recent years it has garnered significant attention even though it continues to evolve and that there is no standard definition of a digital twin. It dates to a 2002 report published by the University of Michigan, but this very concept was limited by the poorly developed data acquisition technologies and computational performance algorithms available at the time. It was not until 2010 that NASA proposed the term "digital twin" in a paper published [1]. Later, in 2012 NASA and the Air Force Research Laboratory worked together on proposing examples of digital twins of future aircraft so that they could be tested under extreme conditions. Finally, in 2014, Professor Michael Grieves defined a digital twin as consisting of three main parts: physical entities in real space, virtual models in virtual space, and the data connection linking the two parts.
The first of these three main components, physical entities, is the basis of digital twins. They are objective and present in the real world and can perform tasks independently. Their research focuses on monitoring the work processes of the physical entities through any type of sensor to obtain data on their state of operation. Virtual models, the second main component of digital twins, is the key to differentiate this technology from any other and is also the basis of virtual-real interaction. A virtual model is defined as a "copy" of a physical entity that can mimic, characterize, and describe its properties and operation from multiple temporal and spatial viewpoints [4]. It is provided with all kinds of data, such as material properties, geometric dimensions, or historical performance data, to drive and model a simulation that can be used to control, optimize or even predict the actual performance of physical entities (The third and final component, twin data, is the engine of this technology. This data typically includes physical, virtual, knowledge and derived information, and is made up of different types, so that it enhances the tracking of the operating state of physical entities and the performance of virtual models.
As mentioned above, digital twins can be used in a wide variety of fields; their performance is excellent in design simulation optimization, operation monitoring and predictive maintenance, so they can be used in industrial production or other fields. Digital twins can be used for remaining life prediction of spacecraft, digital design of roller stores, health care for the elderly, wind turbines, and so on. But in this specific research, the focus will be on the visualization of digital twins for photovoltaic installations.
The adoption of digital twins in photovoltaic (PV) systems is increasing rapidly, offering significant advantages in terms of design, optimization and operation. Digital twins can provide accurate modeling and simulation of PV systems, enabling improved performance, reliability, and maintenance [5]. The challenges and limitations of such systems include lack of data, complexity of the models, and the need for expertise in different fields. The present review aims to provide a comprehensive analysis of the state of the art of methods and tools for digital twins in PV systems, as well as future directions for research in this field. The main search keywords were "digital twins for photovoltaic installations" and the databases were Scopus, Web of Science and IEEE.
In terms of smart manufacturing and Industry 4.0, digital twin technologies have proven to be a powerful tool. On the other hand, the use of these technologies focused on the improvement of photovoltaic installations has been little investigated, so, with a detailed and insightful review, this paper aims to:
1) Study and describe digital twin technology, its parts and how it works.
2) Analyze the different applications that have been made of this technology, summarizing from them the significant tools that could be interesting for this study.
3) Discuss the methods available to use digital twins as an asset in PV installations and ultimately elaborate on this technology.
2. Materials and Methods
2.1. Classification criteria
For this article, two different searches were carried out in different sources. First, we searched for articles published in the previous three years related to digital twins using the keywords "digital twin", specifically ScienceDirect, Scopus and WebOfScience. A second search was then performed. This time using the keywords "Digital twin in photovoltaic installations" in Scopus, WebOfScience, ScienceDirect and IEEE. From the first search, the most relevant articles were selected, taking into account their introduction and abstract parts. This selection was made in order to gather the crucial information for the purpose of this work, which is none other than to explain the general concept of digital twin and its main uses. The second search was performed to gather as much information as possible about the application of the digital twin technology that most interests this research, which is the implementation of such technology in a photovoltaic installation. From this second search very few articles were found (9, to be precise), so it is intended to consider all of them.
2.2. Methodology
For further explanation, the literature review method will be divided into three steps: collection, filtering and classification.
Step 1: This first step consists of collecting the literature published in the last three years, from January 2020 to June 2023. Select databases such as Scopus, WebOfScience, IEEE Xplore and ScienceDirect. The literature collection method was shown above. Search keywords to see if the topic and content of the article are useful for the purpose of this research.
Step 2: To filter the literature collected during step 1, some crucial parts of the articles (abstract, introduction and conclusion) are read. If these parts of the article contain information that shows relevance to any topic related to this study, such as the definition of digital twins, types and classification of digital twins and digital twins in PV installations; it is left for review, otherwise it is rejected.
Step 3: Classification of the previously reviewed literature is performed by peer-reviewing each article and summarizing common claims and similarities.
3. The Digital Twin (DT)
3.1. The Digital Twin concept
The digital twin concept was first formulated by Michael Grieves in 2003 at the University of Michigan during a product lifecycle management class. Later, Helen Gill of the National Science Foundation invented the concept of cyber-physical systems in 2006. [1]). After that, cyber-physical systems received a higher level of attention than digital twins, which were not really addressed until more recent years.
In 2017, for example, cyber-physical systems were defined as "a new trend in research work related to the Internet of Things, in which physical systems act as sensors to collect information from the real world and communicate it to computational modules to corresponding physical systems through a feedback loop." [6], while in 2019 "cyber-physical systems are multidimensional, complex systems that integrate the dynamic cyber and physical worlds." [7]. On the other hand, digital twins were defined later, in 2020 it was said that "Digital twins (DT) are defined as simulation models that are both obtaining data from the field and triggering actions in the hardware".
From these definitions, the differences between these systems are very clear. Although both technologies interact between the physical and virtual worlds, they operate and are implemented differently. While the digital twins optimize the operating state of a physical process by simulating a virtual model [8] cyber-physical systems control the operation of a real-world entity by analyzing the raw data collected from it by sensors and calculating instructions on a computer. We can also make a differentiation based on components. The main elements that make up a cyber-physical model are the sensing, network and control layers. Separately, the basic components that make up a digital twin are the physical entities, the virtual models and the twin data. As can be seen, a digital twin requires the construction of a virtual model, whereas in cyber-physical systems technology this is not necessary.
As mentioned above, digital twins are mainly composed of three elements: the physical model, the virtual model and the twin data.
3.2. Physical entities
Physical entities are the source of data for the twins and the basis for the construction of virtual models. As objects of study, they are machines or devices that already exist, so their study is usually neglected, although it is essential in the development of digital twins.
3.3. Virtual Model
The virtual model is the key element in the development of digital twin technologies. A virtual model is a digitally mirror image of a physical entity. Therefore, to optimally achieve digital twin technology, it is vital to develop a true virtual model that matches the physical entities to a high degree of detail. Currently, many methodologies for designing virtual models have been developed and proposed.
For example, a concept of a multidimensional digital twin was proposed by [9]. This modeling method provides a detailed description of the model composition and behavior and introduces the TRIZ function model into the five-dimensional framework, which improves the digital twin construction process. Another example would be the biomimicry-based digital twin proposed by Liu et al. in 2021 [10]. This simulation model emulates physical entities mainly in three different aspects: their geometry, their behavior and their environment. This model also includes adaptive features that make it possible to synchronize the changes of the part during its operation.
3.4. Twin Data
Twin data is the connecting element between the real and digital worlds. The sources and categories of twin data are diverse and, in general, can be divided into physical and virtual data [11].
Data acquired by capturing information with the help of different sensors during the working time of a physical entity is called physical data. Virtual data, on the other hand, are generated during the operation of a virtual model (usually in the cloud).
Since these two types of information have different formats, it is necessary to study and develop data exchange protocols that adapt to both formats in any situation, and that can optimally link physical and virtual data. On the other hand, the main problems in this field of research arise when trying to find the appropriate data acquisition method and treatment process for each case.
4. Digital Twin applications
In this chapter of the article, some of the most promising and emerging applications of digital twin technology are presented.
4.1. Digital twin in agriculture
The agronomy industry is full of demanding and complex tasks. First of all, agriculture is a field where the outcome does not always have to do with parameters under human control: weather and climate conditions, soil quality, etc. affect the outcome of the process in unpredictable ways. In addition, it requires continuous monitoring and management of any situation that may occur at that time: farmers must constantly assess and address situations such as pests, diseases, etc. All of the above makes it a vital activity for human development, and most people are not willing to sacrifice all this effort for the little reward it offers.
In this sense, digital twins seem a very interesting tool to apply in agriculture. The use of this technology can help to monitor, control and optimize farm management. Thus, farmers can remotely manage operations based on digital information, without relying on live operations such as manual tasks or direct observation. This also allows them to take immediate action when necessary or estimate the effects of interventions through virtual farm simulations based on real-world data [1].
For example, Verdouw et al. [12] proposed a conceptual framework for the design and implementation of digital twins in agriculture. The work includes an implementation model based on Internet of Things that runs in real time and is characterized by fidelity and complex intelligence. It also includes a control model based on a similar system. This model allows farmers to monitor and simulate the effects of interventions and remotely control tools using actuators [12]. Another example involves the application of digital twin technology in potato harvesting. In this field, the parameters used to program the harvesters by the operators are set taking into account data from the previous year's harvest and the intuition and wisdom of the worker, so the effectiveness of the device depends largely on the operator's experience. Kampker et al. [13] proposed a digital twin model for this situation: a plastic replica of a potato that weighs and measures the same as the average real potato on the farm incorporates sensors to detect collisions and possible damage to the product, so that the system can act and prevent possible losses at harvest time. The data is analyzed and presented to the machine user on a real-time basis giving the operator the opportunity to adjust parameters and increase productivity while ensuring the integrity of the potatoes [13].
4.2. Digital twin in power supply
Digital twin technologies can be used to increase productivity and reduce waste in any industrial process, but especially in the food manufacturing industry, which could be of particular interest. The food processing field needs answers to issues such as food safety and wholesomeness, sustainability, climate change and changing consumer demands. The use of digital twins makes it possible to monitor, control and predict all these factors. The main aspect of food quality is freshness, which is related to the environment in which the product is located and preserved. Since foods preserved at low temperatures maintain moisture and freshness better, parameters such as temperature, humidity or light appear as environmental factors that affect all the mentioned characteristics and that, therefore, it is of great interest to keep under observation.
Monitoring these parameters with the help of synchronized sensors is the main data available to reproduce the chemical decomposition of food in a virtual environment. The biochemical degradation of molecules can be simulated because it is a known and mathematically described process.
Verboven et al. [14] proposed a control method for food processing plants based on digital twins. This project is composed of three main elements (as any digital twin model, as explained earlier in this paper): food process operation (physical entity), virtual replica of the food process operation (virtual model) and IoT platform (twin data). The IoT platform provides the framework and tools needed to integrate sensor communication. The data collected by the sensors during the process is used to drive the operation of the virtual model. The synchronized, real-time operation of both processes (real and virtual) allows the process and production operation to be accurately controlled [14].
4.3. Digital Twin in photovoltaic systems
In each of the sections we review articles that use Digital Twin (DT) technology in optimization studies of the Maximum Power Point search, energy management in homes and power prediction, i.e., studies related to smart grids and the application of DT technology to photovoltaic installations. As well as fault detection methods in distributed PV systems using DT.
4.3.1. Optimization of the search for the Maximum Power Point
This section compares the use of the Digital Twin (DT) for maximum power point tracking (MPPT) in the article Digital Twin based Maximum Power Point Estimation for Photovoltaic Systems Maximum and the article Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
Photovoltaic cells have V-I characteristic curves that define their behavior under different operating conditions. [15]. The maximum power point (MPP) is the product of the voltage at maximum point (VMPP) and current at maximum point (IMPP) for which the power extracted from the PV array is maximum (PMPP). The maximum power point varies continuously, as it depends on factors such as the temperature of the solar cell and irradiance conditions [16].
4.3.1.1. Maximum Power Point (MPP) search
Maximum power point tracking (MPPT) algorithms are used in photovoltaic systems to maximize the energy delivered by them, such tracking is basically performed by varying the useful cycle value of a power converter [15]. There are a variety of maximum power point tracking algorithms as shown in.[17] such as: perturb and observe, fuzzy logic based, artificial neural network based, RCC (Ripple Correlation Control). [18], incremental conductance (INC) [19] among others. The complexity of these algorithms varies according to the convergence speed of the MPP, the different sensors used, the cost, etc.
The (P&O) is widely used due to its simplicity of operation. [20]It consists in modifying the duty cycle of a power converter (DC/DC) connected to the output of the photovoltaic string, with the change of the duty cycle the current drawn from the photovoltaic array is modified, therefore the power obtained is modified in relation to the modification of the duty cycle of the converter trigger signal.
The perturb-and-observe algorithm is based on the following criterion: if the operating voltage, Vpv of the PV array is perturbed in a certain direction and the power extracted from it increases it means that the operating point has moved towards the MPP, therefore the operating voltage should be perturbed in the same direction, otherwise if the power extracted from the PV array decreases, the operating point has moved in the opposite direction of the location of the MPP, therefore the operating voltage should be perturbed in the opposite direction to the one it had [20]. The PWM value is the useful cycle value used to vary the voltage of the PV string, the algorithm compares the current power with the previous one and based on that determines whether to continue applying the same perturbation or it should be reversed in the next cycle [15].
At [21] reference is made that P&O algorithms require very low computational power, but have disadvantages. One is the oscillation around the MPP point once it is reached, which is a loss of efficiency, and the other is that a local minimum is reached instead of the global one [22,23] partial shadow conditions (PSC). To solve these problems, one option is to reduce the step size, but this implies that the algorithm tracks the MPP more slowly [24].
At [25] it is indicated that currently, no algorithm can accurately identify the complexity of the shading condition and the resulting changes in the output of the PV power production system. In that study, the gap between simulation results and actual results is intended to be decreased by posing challenges to the practical application of MPPE algorithm. In PV systems, discrepancies in the physical characteristics of PV strings are the main cause of the gap from simulated to real results. The properties of PV strings can fluctuate drastically due to temperature, humidity, location or wear and tear over time.
Many studies can be found on the development of modified and improved P&O control algorithms. For example, several studies have been conducted to find suitable steps (Numan et al. [26]), Méndez et al. [27] for example, compared the particle swarm optimization (PSO) and the earthquake optimization algorithm (EOA) achieving higher energy efficiency. However, the optimization algorithms require high computational resources to solve optimization problem [28].
Incremental conductance (InCond) algorithms track changes in voltage and current rather than power. This makes IncCond algorithms faster and more accurate, but increases the computational cost [21]. Li et al. [29] developed a variable step IncCond using a step size adjustment coefficient, subsequently achieving fast response and better steady-state performance. But, IncCond algorithms present the same behavioral problem with respect to oscillation around the MPP.
Artetxe et al [21] it is also mentioned that reinforcement learning (RL) has become a technique that is gaining popularity for MPPT controllers, due to its resilience to environmental changes and self-learning capability [30]. There are several types of RL agents that have been discussed previously. Chou et al. [31]for example, compared a Q-table method (RL-QT) and a Q-network method (RL-QN), where RL-QT demonstrated smaller oscillations and RL-QN achieving higher average power. Phant et al. [32]chose to discuss the applicability of a DDPG agent, the one used in that work, compared to a DQN agent, comparing both, in addition, to a P&O. The DDPG works better under PSC conditions. It extracts more power than the DQN-based method and has the highest tracking speed, while being the most efficient. The DDPG agent and its variant, Twin-Delayed control (TD3), were also used by Nicola et al. [33].
The work developed in [21] presents a controller based on a DDPG agent that is combined with a solar panel DT and DC/DC converter in its training. In this case, the RL algorithm (DDPG agent) is not directly used as a controller, it helps to obtain a better performance of the controllers by providing references of the control signals.
To validate the efficiency of this control scheme, this paper compares and evaluates the RL (DDPG) algorithm for MPPT control with more traditional P&O controller solutions, both in simulation and actual implementation.
To carry out the study in [25] a Digital Twin is built for the PV system to estimate the Global Maximum Power Point GMPP, since the point tracking algorithms (MPPT) cannot guarantee that the GMPP is obtained. Thus seeking to eliminate or decrease the error between the real world and the simulation environment by using an artificial environment (a neural network).
4.3.1.2. Digital Twin (DT) model
The DT model in Artetxe et al. [21] is based on mathematical equations that characterize the behavior of the PV panel. While in Wang et al. [25] the DT of the PV module string consists of a database of real values, the analytical model in MATLAB/Simulink and a neural network. In the following, the DT model proposed by both studies is detailed.
In Artetxe et al [21] it is discussed that the use of DT allows to accelerate the learning process, allows the abstraction of weather conditions and simulating any state, so that the control is more robust. In addition, the maximum power can be used to complement the agent's reward function, thus optimizing the entire learning process. The paper also mentions that, the use of DT reduces the actual training time by 40.76% due to the higher speed of the simulations compared to the real system.
The characterization of the photovoltaic panel can be seen in Figure 1, in this article the single diode model has been used. [34]as shown in Figure 1, which was used for its simplicity and accuracy mentioned by the author of the article.
The equations obtained from the model in Figure 1 represent the mathematical equations of the digital twin used in Artetxe et al. [21]. They represent the output current and voltage taking into account the number of modules in parallel and in series.
The first step is to build a database with real values (xreal) by collecting the shading matrix of real-world PV systems. Such a matrix is defined as a vectorized description of the shading condition of a PV string according to. [35]. According to Wang et al. [25] the position of the global maximum power point (GMPP) can be extrapolated from the shading matrix. At the same time, an analytical model of the PV system is constructed in digital space (Matlab/Simulink) and an xmodel database is generated [36]. [36]. The simulation-to-actual gap (the deviation between the inference results of xreal and xmodel) is modeled through a neural network. To obtain the MPPE results, xreal is assigned to be xmodel and the output is summed with the deviations obtained from the neural network, thus obtaining the digital twin response which is the string voltage in the MPP (Vpv,set) (see Figure 2).
4.3.1.3. Simulation
In Artetxe et al [21] reinforcement learning (RL) was used with the DDPG agent which is described in the paper in great detail and is described below as written in that paper. In contrast, in Wang et al. [25] only mentions that a neural network was used without providing more detail.
The control variable manipulated in MPPT control is the duty cycle of the converter. Therefore, the use of a continuous action and state space is more appropriate. Among the algorithms that handle continuous action and state spaces, the deep deterministic policy gradient (DDPG) is the most common. DDPG is a type of reinforcement learning algorithm that combines ideas from both deep learning and policy gradient methods [37]. DDPG is particularly suitable for continuous control problems where the action space is continuous and high-dimensional. DDPG is an out-of-policy algorithm, which means that it learns from a separate set of experiences called an experience buffer, rather than directly from the agent's current interactions with the environment. This provides the algorithm with efficient learning and improved stability.
Both papers use the MATLAB/Simulink environment to carry out the simulations of their DT models. In the paper by Artetxe et al. [21] does not stop with just simulating the DT response, but they also simulate the real system response using MicroLabBox DS1202 for this purpose. This is a multipurpose rapid control prototyping system, a comprehensive platform that is designed for laboratory use specifically and can also produce analog, digital and PWM signals. In addition, it supports real-time interface (RTI), is a fast and automatic C-code generation platform, so designers only need to focus on the Simulink interface.
Simulation, training and design in Artetxe et al. [21] was performed in Matlab 2022b and Simulink with the RL toolbox. Windows 10 Enterprise operating system version 1809 was used. The code was compiled and uploaded by Matlab in C++ for subsequent loading on the MicroLabBox DS1202. Through the dSapce Controldesk software, real-time experiment data acquisition was performed and imported into Matlab for data processing and visualization.
To carry out the training (see Figure 3), the environmental conditions (irradiance and temperature), power output and duty cycle are sent to the controller as state space. The reward function used in the implementation of the reward function used the highest power outputs and positive changes in power. In addition, it will compare the power with the maximum obtained in the DT under the same conditions, in order to improve the training efficiency.
Two simulations were performed, the trained DDPG agent was tested in different temperature and irradiance conditions. First with a fixed temperature and different irradiance and then simulating different temperatures at a fixed irradiance. Thus, the effect of these variables on the maximum power offered by the panel was observed. Comparing in this way the response of the DDPG agent and that of a Perturb and Observe (P&O) controller with a fixed step size and observing if there is an improvement in the MPPT. In all cases the simulations were performed with a fixed resistance in the DC/DC converter.
The simulation carried out in the paper Wang et al. [25] is performed with MATLAB/Simulink to evaluate the proposed MPPE approach, which was described in the digital twin model section. In this case by not using mathematical equations in their DT model and by referring in the article to the panel specification table it is understood that the MATLAB/Simulink Electrical solar panel block has been used.
4.3.1.4. Test in real environment
In Artetxe et al [21] MicroLabBox DS1202 was used to generate the PWM control signal with the appropriate duty cycle according to the RL algorithm (DDPG agent), to make the PV module work at its MPP. It is mentioned in Wang et al. [25] that in the PV strings they have taken data of the current, voltage and atmospheric conditions for five days, to verify that with the DT model proposed by them (making the PV string work at the PV string voltage obtained as the DT response at the GMPP point) they manage to decrease the gap between the simulated and real results.
For the real environment test of the study by Artetxe et al. [21] a Peimar SG340P polycrystalline solar panel together with a TEP-192 boost converter is used. Irradiance and temperature were measured using a Meteo Control Si-V-010-T irradiance sensor. The PWM signal was generated using the MicroLabBox DS1202 hardware from dSPACE. The circuit was closed with variable resistors (BK8500) acting as an adjustable load to realize different experimental scenarios. Figure 4 shows a diagram of the hardware and connections between the elements.
In Wang et al. [25] the model of the PV panel is not specified, only the characteristic table with the panel data under STC conditions is given. For the real environment test, a string of three and five PV modules were studied separately to obtain data under different environmental conditions. Real-time data were collected for five days from the panel strings using the PROVA PV system analyzer. The analyzer captures I-V data as well as atmospheric information.
4.3.1.5 Results
In the work of Artetxe et al. [21] it is proved that the P&O needs more time to reach the same point as with the DDPG. The DDPG controller acts faster compared to the P&O because the only limiting factor on how fast the MPP is reached is the DC/DC converter itself after receiving the PWM signal. All this can be seen in Figure 5 and 6 which are the simulation results at constant temperature and variable irradiance and under constant irradiance and variable temperature, respectively.
In the real environment, tests were performed with different irradiance and temperature conditions, as in the simulations. To make the comparison in the solar panel, the controllers are operated one after the other in a short period of time so that the irradiance and temperature conditions are as uniform as possible.
It should be noted that the two controllers achieve a different MPP, although they are very close. This is because, although the two controllers have been run one after the other in short period of time the irradiance during the whole experiment was constant, which results in a small change in the MPP value.
The improvement of the DDPG in terms of speed and efficiency in the simulated tests and those carried out in real environment, the 51.45% efficiency improvement obtained by the DDPG with respect to the P&O stands out from these data. Artetxe et al [21] compares their work with other similar works such as. [32] Phant et al. where two similar simulations were carried out, obtaining an efficiency of 0.96% compared to the 8.59% obtained in [21]. In this other work the simulation with constant irradiation and temperature variation obtained an efficiency of 2.74% while in Artetxe et al. [21] an efficiency of 10.45% was achieved. He makes another comparison with another work that also used neural networks, where the authors. [38] compared their incremental method with a conventional P&O in simulation. Obtaining an efficiency improvement of 5.2% with respect to a conventional P&O, reaching an improvement of 10.45% in Artetxe et al. [21].
A significant improvement is obtained with the proposed method, being 4% and 5% the estimated error between the simulation model and the real world, respectively.
It can be said that in Artetxe et al. [21] focuses their study on finding the MPP for a panel, in contrast in the study of Wang et al. [25] does it for a string of photovoltaic panels searching for the GMPPT. But both studies contribute to the field of research in advancing MPPT algorithms by incorporating digital twin technology and neural networks. Providing improved performance compared to current MPPT algorithms and decreasing the gap between simulated and real results.
In Artetxe et al [21] RL (DDPG agent) with a DT was used as the MPPT method of a solar PV panel, comparing the results with the P&O controller. First, the simulation of the proposed study was performed and then tested in a real environment. After the tests performed, it can be concluded that the performance of the DDPG is better in finding the MPP in different environmental conditions in both simulated and real tests. It reaches the desired power in a shorter time, as it is only limited by the slow dynamics of the converter. In addition, it does not show any oscillation when reaching the MPP value as the P&O does.
Although the results are promising, Artetxe et al. [21] states that more studies and tests are needed to validate the effectiveness of the DDPG agent under different conditions, such as partial shade condition (PSC). It should be noted that weather dependence is a problem, it is not possible to recreate scenarios in which it is possible to study how best to improve the response of the controllers, as could be achieved in a controlled environment.
Artetxe et al [21] mentions that it would be interesting to explore the possibility of combining reinforcement learning techniques or the use of digital twins with other control optimization methods, such as feedback control or model predictive control. In addition, it would be valuable to test reinforcement learning control with an array of solar PV panels to examine its performance in a more complex system.
In this article by Wang et al. [25], they study the MPPE approach based on digital twins t states that the work done shows that the use of digital twin to estimate the GMPP can close the gap between simulation and real. And that the proposed method improved the estimation performance and shows a promising application for GMPPT system. Table 1 shows a summary of what we have seen in this point.
4.3.2. Power prediction
Renewable technologies are currently growing rapidly and becoming increasingly efficient and competitive and are at the heart of the energy transition. Renewable energy forecasting enables efficient management of renewable energy. With the increasing adoption of renewable energy and the ongoing reforms in the energy market, the implementation of AI Grid technology (also the terms, smart grid (SG), smart grid, smart grid, intelligrid, Futuregrid, intergrid or intragrid) has become a prominent trend in the development of energy systems and is an improvement of the 20th century power grid. [39].
In this section we review the article by Wang et al. [40] regarding the use of DT, for energy forecasting in wind and photovoltaic systems. As the subject of this article is photovoltaic systems, only the study of the photovoltaic system will be discussed.
In Wang et al. [40] a digital twin power forecasting platform for AI Grid is proposed. [10]. That starting from historical power load data and weather conditions. [40] the platform predicts wind and PV power generation for a given date. Thus providing a platform that offers support to end consumers in the electricity market when making consumption decisions, allowing a better management of the electricity system.
Ultimately, the work in Wang et al. [40] consisted of the creation of a real PV and wind power generation database through Elia Open Renewable Energy Generation (Elia Transmission Belgium operates the electricity transmission network in Belgium), the development of the load power forecasting model, and finally the visualization through the DT module.
In the work of [41] two complementary approaches for energy prediction of a solar panel are presented. These approaches are carried out using the object-oriented modeling language Modelica and the long-term memory model (LSTM).
4.3.2.1. Digital Twin (DT) model
The work in Wang et al. [40] presents a digital twin power forecasting platform for AI Grids, using DT model to create a realistic simulation environment on par with accurate forecasting of wind and PV loads.
The DT model proposed in this work consists of creating a 3D model of the PV plant (data collection and creation of the 3D digital twin) and an intuitive interface with the prediction results. Periodically, polling requests are sent to the server to update the view in real time.
In 3D digital space, a real photovoltaic plant is modeled as a research scenario with the 3DSMAX program. At the same time using Blender 3.4 to have a more refined model.
The platform developed for the visualization of the DT updates the data and graphs of the interface in real time. It is a very intuitive platform that allows selecting the desired forecast date and visualizing the predicted results, see Figure 7. This platform allows data analysis and forecasting, contributing to an improvement in the management and optimization of PV power generation plants.
At [41] the DT approach using Modelica consists of physical-numeric model, based on mathematical equations representing the behavior of the solar panel. And the second approach is based on machine learning algorithm (LSTM), which is trained with historical data of temperature, irradiance and energy production.
For the data update in the digital twin platform, the server periodically sends the updated data retrieved from the cloud, with those of the WPNet model results sent by the local server to the cloud.
4.3.2.2. Simulation
From the literature review in Wang et al. [40] Regarding power forecasting models in photovoltaic systems. [42,43] it is concluded that the best results were obtained with the deep learning approach. Furthermore, it is concluded that most of the current deep learning algorithms are used to predict power loads of nonrenewable energy sources [44,45,46,47]. And that the research related to prediction of renewable energy based on meteorological data is scarce, therefore, in this study, the WPNet model based on deep learning is developed. Such a model has first the data processing layer, another GRU layer, and finally the Dense layer.
The power generated by a photovoltaic installation is determined mainly by irradiance and temperature. Current prediction models do not provide accurate forecasts of environmental conditions.
In Wang et al. [40] over eighteen thousand PV generation log data and weather conditions from the year 2021 to the year 2023 from the Belgian regions of Flanders and Wallonia were used. The data was taken from Elia Open Renewable Energy Generation and a filtered real PV load power database was built with the data in order to make the forecast. The data used are, PV power, wind power and generation impact factor. On the other hand, meteorological data are taken from Brussels.
As mentioned above, the WPNet model was used to carry out the prediction model. The metrics used to evaluate this method were the mean square error (MSE), the absolute mean square error (MAE) and the root mean square error (RMSE).
Simulation of the two approaches proposed in [41] is performed in the Modelica simulation environment.
4.3.2.3. Results
In the simulations performed in Wang et al. [40] the proposed WPNet model was compared with other load power forecasting models including LSTM, CNN, Attention, and Transformer models. The load power data and weather conditions were used as inputs for the simulation to obtain the predicted load power values. The results obtained were that the model proposed in Wang et al. [40] provides results with higher accuracy than the other models.
After filtering and processing the weather data, the WPNet model is used to predict the power at different time intervals and these are sent to the digital twin model visualization platform.
Ultimately, this study achieved milestones through a digital twin-based approach for wind power and PV power forecasting, but the limitations and therefore future lines of work in this study will be the study of failure and scale changes in equipment, for more accurate renewable power forecasting. Aiming to contribute to optimal smart grid operation and better planning decisions.
The results of the two approaches proposed in [41] show that the model's ability to predict the hourly frequency during the day the worst model is LSTM, while for RMSE values the worst model is the one based entirely on mathematical equations in Modelica. Table 2 shows a summary of what we have seen in this point.
4.3.3. Energy management in buildings
An important point in a microgrid is the balance between production and load, where the users are involved in achieving this balance. [48]. For users to commit to shifting the load involves carrying out various demand response schemes [49]. Price-based demand response is one of the main points to be studied. Algorithms and automation technologies are also needed to schedule loads. There are several research in this field as is the case of. [50] y [51] where household energy use scheduling and energy management scheduling of different loads are studied, respectively.
In the article under review here, Yuan et al. [52], user preferences are taken into account at the time of load scheduling as in. [53,54,55]. In Yuan et al. [52] the uncertainty associated with solar irradiance has been taken into account unlike in the paper by. [56] where a residential load management system was proposed using distributed generation sources.
In Yuan et al. [52] the RL algorithm was used to perform several simulations to schedule loads with the lowest daily cost of electricity, efficiently utilizing PV and grid-sourced energy by taking into account the user's load operation preferences. The paper provides a mathematical formulation, the use of the Beta probability density function to model the uncertainty of PV production and the development of an algorithm using Digital Twin model, to minimize energy bills by including renewable energy resources for load scheduling.
The purpose of the study by Al-Isawi et al. [57] is to seek the balance between energy generation and demand in buildings with an innovative approach in creating DT from solar PV energy production. The PV system under study is a two-panel PV system located on the rooftop of the renewable energy research laboratory at the University of Sharjah. Power production predictions are made 15 minutes in advance using the LSTM network. As well as, an application with MATLAB APP Designer to visualize the performance of the Digital Twin allowing the anticipation of energy imbalances.
4.3.3.1. Digital Twin (DT) model
The DT approach proposed in [52] consists of a multi-layer framework for processing and collecting information with a bidirectional flow, thus differentiating itself from centralized processing methods as in. [58,59]. The suggested multilayer method, which is explained below, from. [52] is sought to reduce the peak power demand, a rate optimization and the configuration of the central power control parameters of the upper layer of the suggested DT.
The upper layer is called the Electrical Digital Twin (EDT), which represents the electrical control center. In this layer the central controller adjusts the billing after receiving consumption data from the lower layer.
The lower layer of the DT of each smart home is referred to in this article as the Home Hk Digital Twin (HDTk). In this layer, the local controller of the smart home collects information and data from the upper layer of the Digital Twin (EDT) and the devices in the home, representing with this information a digital replica of the behavior of the devices in the home. Taking into account the user's preferences and the expected energy price, the aim is to improve the energy consumption patterns of the replicas of electrical devices. The data that is collected to create the replica of the devices in the home is done through the IoT, in this way the hourly energy consumption is known. And if this data reading is not possible, as mentioned in the article, the information from the datasheet of the device is used, obtaining what they call the nominal energy use.
In a neighborhood, each HDT in each home estimates the periods of best consumption of each device based on the user's consumption habits and preferences.
The model of the DT of the photovoltaic installation studied in [57], two 335 W panels placed in series were carried out with renewable energy block diagram, MATLAB/Simulink Simscape Electrical.
4.3.3.2. Simulation
In order to integrate photovoltaics into the load scheduling, a stochastic model is created due to the unpredictable nature of solar radiation. The implementation of the Beta distribution function (Beta PDF) has been chosen based on previous data collected over a year studying hourly solar radiation, in order to capture the random behavior of this resource [60]. PV modules generate power as a function of solar radiation, ambient temperature, and module characteristics. Using the associated PDF Beta, the solar irradiance for a specific hour is determined. The photovoltaic power output (PS) of the item under review here is obtained as a function of the estimated irradiance and using mathematical equations. This power is used for load scheduling with distributed generation (DG).
The mathematical model they provide to solve the LCP load scheduling problem aims to minimize the economic cost of total electricity in a day taking into account the degree of user inconvenience due to load operation delay. The problem formulation is posed for both the case of no and n resources, such as photovoltaics, grids, wind turbines and energy storage.
In formulating the problem they took into account the number of loads in a household, the time division of the day into 24 time periods (k = 1, ..., 24), the load operation interval (start and end time of load operation), the load operation duration, and the rated power in kW of the load. In addition, they introduced the udc parameter to capture the degree of user inconvenience when there are operating delays, such as in washing machine operation. A low udc value indicates comfort with the delay, while a high udc value indicates the opposite, thus generating higher energy costs.
To carry out the simulations, an algorithm for the LCP is developed using DG, for a grid-connected house with PV installation, data and performance specifications for each load. The objective of the RL algorithm is to minimize the daily cost of electricity using two resources, PV and grid, taking into account user preferences. The aim is to reduce the energy cost in each hour interval of each day, for each type of resource.
In addition, the appliances are assigned preferences according to consumption priorities, knowing which appliance the user accepts if there is a delay in its operation. We study and take into account the energy use patterns that may exist in a neighborhood depending on the type of users, in order to know, among other parameters, the peak hour of the highest consumption.
In Yuan et al. [52] several simulation tests were carried out evaluating and testing the flexibility of the algorithm designed for the load scheduling problem (LCP) using RL both in the case of having and not having DG, the results of these simulations are detailed in the results section.
At [57] long-term memory networks (LSTM) were used, with an irradiance and temperature data period of two weeks (a part of the recorded historical data). Simulation of the dc power generated every 15 minutes was carried out in MATLAB and Simulink.
4.3.3.3. Test in real environment
The work of Yuan et al. [52] was completely simulated, they have not performed any tests in the real environment of the Digital Twin based algorithm.
For the test in real situation in [57] the rooftop installation of the renewable energy laboratory of the University of Sharjah was used. The Profitest measuring device was used for receiving the data of power, inclined global irradiance and module temperature every 15 minutes from the installation. In addition, what is actually consumed in the laboratory was compared with what is generated by the photovoltaic installation to obtain a variable to evaluate this difference. In this way, the possibility of achieving NZEB buildings in the renewable energy laboratory was evaluated.
4.3.3.4. Results
First they perform test with 6 loads, disregarding the PV power source in the simulation. The loads were scheduled in a low energy price range. In the simulations different udc values were used in order to study their effect, so that it was concluded that increasing the udc value, i.e. when comfort is a priority and no delays in operation are accepted, this means a higher energy price.
Then a differential tariff is selected and 100 random loads are created with a load generator to check and validate the results according to the udc values in terms of their operating schedule. The operating intervals of the loads are randomized. Later in this paper they evaluate the results obtained with those of the LA algorithm in [61] where the RL algorithm in Yuan et al. [52] presents a shorter computational time.
The next scenario they simulate is to include the PV resource, the randomness of the solar radiation is represented using the Beta distribution function, so that the RL algorithm learns at each iteration. They perform the same procedure first with 6 loads and then with 100 random loads. In such a scenario, the energy cost decreases, as well as the power consumption of the grid decreases. In addition, the usage time using RL is higher as more actions are performed.
Another simulation scenario is the investigation of the efficiency of the suggested scheduling algorithm using a small microgrid with residential scheduled and unscheduled devices, and also a PV resource. Initially, the DG resource is not considered in the analysis.
Simulation is compared with the gray wolf optimization algorithm (GWOA). [[62], Ch. 72] with residential loads with the proposed RL algorithm. A similar minimum price is obtained in the two simulations. The GWOA algorithm requires more computational time and presents greater difficulty when PV resources are present than the RL algorithm using the Beta probability density function.
The results of [57] indicate that the power production forecast of the developed LSTM network is reliable (R=0.99831). The balance between demand and consumption in the laboratory was studied and it was determined that the current installation does not cover the demand of the renewable energy laboratory. Table 3 shows a summary of what we have seen in this point.
4.3.4. Fault detection in distributed photovoltaic systems
There are many articles that study how failures in photovoltaic installations affect performance and safety, for example in [63,64]. Therefore, many other studies investigate the detection and diagnosis of failures of different components in PV systems [65,66,67], such as solar panel breakage (microcracks), solar cell or bypass diode breakage, wiring failures, potential induced degradation (PID) and short circuit problems in power converters [68,69]. Work on the detection and classification of faults in photovoltaic installations through artificial intelligence techniques has been increasing [70,71,72]. And not all studies include a system for alerting the user when the fault occurs [70,71,72]. In Yalçin et al.[73] it is referenced that DT technology is used for operation and maintenance in solar power systems according to several studies. For the life cycle management of the solar plant. [74] Or for the monitoring of decentralized renewable energy sources. [75].
This section compares the articles by Jain et al. [76], Hong et al. [77] and Yalçin et al.[73], in their approach of using DT for fault diagnosis in a PV system.
In the article Jain et al. [76] mentioned that there is little research for fault diagnosis for a complete PVECU (a PV panel together with a power converter). Implying that, hence the need for their study, they carry out a digital twin approach for fault diagnosis for a distributed power electronics-based PV system. For each PVECU a fault diagnosis is performed, the output of the digital twin and the physical model is compared obtaining a residual vector whose values allow the detection and identification of the fault. The proposed approach is tested in a real environment and carried out in an FPGA to show the effectiveness of being able to detect up to ten different types of faults and to distinguish whether they are faults in the photovoltaic panel, the power converter at the panel level or electrical sensor faults. In short, the paper explains how a prototype source-level power converter has been developed and designed to create a fault detection and identification system in a distributed photovoltaic system.
A novel Deep Learning method is presented in Hong et al. [77] developed a PV fault detection method using Digital Twin (DT) model, a convolutional mixer (ConvMixer) for fault classification. And all this together with a long-range notification (LoRa) system. Using the Markov transition field transform (MTF), 2D images with the simulated PV faults are generated and used as input to ConvMixer. The PV system studied in this paper is a 49 kW grid-connected system at Chung Yuan Christian University, Taoyuan, Taiwan.
The real-time simulation to verify the effectiveness of the proposed method of integrating DT for fault detection and ConvMixer for calification together with the LoRoa notification system was carried out with Opal-RT eMegasim (real-time digital simulator representing the real PV installation).
An innovative TD approach applied to photovoltaic installations mainly aimed at the operation and maintenance of such installations is proposed. In Yalçin et al.[73] it is proposed to create the DT of each component of the PV installation (PV panel, DC converter and final output power of the system or power grid as mentioned in the article) and not a general DT model of the whole system. Thus, seeking a better knowledge of the state of each component and an efficient fault detection. The behavior of the PV system is predicted by training three different machine learning algorithms (random forest regression, deep neural network regression and catboost regression) for it, thus being able to detect component malfunction.
4.3.4.1. Digital Twin (DT) model
In all three papers, the DT model takes into account the meteorological conditions of temperature and irradiance as inputs. In Jain et al. [76] and in Hong et al. [77] mathematical equations are used to model the DT and consider the whole PV installation to which they do the DT, while the third one, Yalçin et al.[73], uses a DT approach for each part of the PV installation. It should be differentiated that in the first one the simulation of the digital twin is done in MATLB/Simulink and in the second one in Python. In contrast, the DT model proposed in Yalçin et al.[73] which consisted of creating DT of each part of the photovoltaic installation (PV panel, DC converter and power grid) uses the PV panel, converter and power grid blocks that come in MATLAB/Simulink Electrical. In both cases the output of the real system is compared with the output of the digital system for fault detection.
The DT model presented in Jain et al. [76] is represented by a set of equations modeling the behavior of a PVECU having a four-switch step-down power electronic converter. For the choice of such a converter they relied, among many others, on. [78] because it allows greater flexibility in the number of panels in series with higher efficiency. The DT response according to temperature and irradiance conditions contains information on the state of the power converter (power converter inductor current and power converter capacitor voltage), the solar panel current and voltage at the MPP point, as well as the sensor gains represented in an identity matrix. The paper further assures that the solar panel current and voltage equations are within ±5% error. The DT simulation is performed in MATLAB/Simulink.
In Hong et al. [77] the DT model based on mathematical equations is used. [79] for PV fault detection which is implemented in Python 3.7. They perform the PV fault detection by comparing the PV power of the output dc array of the physical system and the digital system. In Hong et al. [77] indicate that they consider that there is a fault when the difference of the dc power of the real PV array and that of the DT is less than 0.5 % of the dc PV array power of the DT. The physical system is implemented in Opal-RT, as will be explained in the real environment test section, the DT receives the temperature and irradiance data through the data sent by Opal-RT and the user diagram protocol (UDP). Once the fault is detected, the Python program uses the ConvMixer previously trained in Matlab/Simulink for fault classification.
The DT approach for each component of the PV system (PV panel, DC converter and power grid) in the work of Yalçin et al.[73] consists of creating a single platform on which to have all the necessary information for the operation and maintenance of the grid-connected PV installation. The proposed platform is developed on Docker (an open source platform that encapsulates applications facilitating software development and deployment). They created a REST API for interaction with the outside to receive irradiance and temperature data, as well as MATLAB/Simulink PV installation data and prediction models. They use the skitlearn framework and keras for machine learning, prediction or retraining commands are received through the Redis database. The Inlux DB database is used to store the time series data. The DT approach proposed in Yalçin et al.[73] is visualized in Grafana (a free software that allows the visualization of graphs from multiple sources such as Inlux DB, etc.). The objective of the DT is that with the trained model it is possible to predict how each component of the PV system would behave and to be able to compare with the real behavior, thus being able to know if there is any deviation and possible failure in the installation. The failure signal is sent to the user when there is a 20% difference between the response of the real twin and the digital twin.
4.3.4.2. Simulation
Neural network models are trained in the simulation in order to differentiate the type of failure occurring in Hong et al. [77] and Yalçin et al.[73], while in Jain et al. [76] a library is created with the faults induced in the simulated PV system. In all three works MATLAB/Simulink was used to perform the simulation and to be able to differentiate the type of failure. Of the works that used neural networks, Hong et al. [77] presents an innovative method of their own developed for fault identification. In contrast, in Yalçin et al.[73] 3 existing models were tested to determine which one provides the best result. The study by Hong et al. [77] and Yalçin et al.[73] was fully simulated, to give a closer approach to the real environment in Hong et al. [77] the real-time digital simulator Opal-RT eMegasim was used.
The methodology for detecting failures proposed in Jain et al. [76] involves digitally comparing the real-time physical system output with the DT output (the real system output values are subtracted from the DT output values), so that when there are no faults both outputs are the same, thus generating an error vector. In order to put all this into practice and to be able to differentiate the type of fault that can occur in the PVECU, they use the MATLAB/Simulink electrical circuit simulation toolbox to study and create a fault library, according to the responses of the DT to the faults induced in the simulation. In the study by Jain et al. [76] neural networks are not used. In MATLAB/Simulink simulations they simulated different types of faults and observed the responses of the DT. So that it could be observed that each type of fault evolves and takes a different direction in space, thus being able to create a library with 16 different types of faults, related to solar panel, converter and sensor. To test the fault detection and diagnosis approach, a PV system is simulated with two PVECUs connected in series, each with its own control and monitoring system. The simulation shows good results so the next step they perform is testing in a real environment.
A new Deep Learnig method is presented in Hong et al. [77], convolutional mixer (ConvMixer), which receives dc PV power output data from the array in the form of 2D images, such data-to-image transformation is performed by Markov transition field transform (MTF). They mention in [77] that such a method adapts and learns quickly under changing conditions. One convolution layer is used to position the images in space and the other for the channel information to be mixed. The results of the PV power value at the output of the DC converter in the PV fault simulation in MATLAB/Simulink were input to the MTF which converts them into 2D images. After having the 2D images they feed them into the ConvMixer for training. So the ConMixer is trained in Matlab/Simulink to be able to classify the faults.
ConvMixer training in Hong et al. [77] was performed in MATLAB/Simulink in order to simulate and detect line-to-line, panel open-circuit, panel short-circuit, open string, shorted string, and partial shading faults. The power value of the PV array after the converter was used to create 2D images with the MTF and then use those images to input to the ConvMixer and train it. The PV system under study. [77]was implemented in Opal-RT and MATLAB/Simulink (version 2018a). So that a real-time simulation was carried out for the diagnosis, classification and fault reporting of the installation under study. As already mentioned in the Digital Twin model section, they create in the Python program the DT model of the photovoltaic installation to be studied, which receives through UDP communication with the physical model the data of temperature, irradiance and power output of the photovoltaic array in DC to make the comparison and to be able to detect possible in the installation. Then, with the ConvMixer trained in MATLAB/Simulink and loaded in the Python program, the faults are classified. Once classified the faults are sent to the LoRa gateway and from there they are sent to NodeRed (programming tool that allows the connection of hardware devices, online services and APIs in real time) and from there it is connected to IFTT (web service to program as to create actions for the automation of different actions and tasks online), for the fault notification to the user.
In the research of Yalçin et al.[73] three different machine learning (ML) algorithms were used. Since our data are nonlinear and based on time series, linear models would not work well, so they were eliminated. These three regression models are Deep Neural Networks (DNN), Random Forest (RF) and CatBoost. In Yalçin et al.[73] created the MATLAB/Simulink PV installation plant, in order to train the ML models. First, meteorological data for several years were obtained from PVGIS and then part of them are used in the simulation of the PV installation, thus obtaining the experimental data to train the ML models. Since, as mentioned in the article itself, data from a real installation was not available and they had to use the model data in MATLAB/Simulink as if it were a real installation in order to train the ML models. At each step they built containers with Docker, these being Influx DB, ML, Redis, FastAPI and Grafana.
4.3.4.3. Test in real environment
The test in real environment in Jain et al. [76] was carried out using the dc converter designed and developed in that work, where all the simulated fault detection and identification logic, as well as the library created in the simulation, is loaded into an FPGA. In Hong et al. [77] a hardware emulator of the PV plant was used in the laboratory (Opal-RT), so it itself is not carried out in authentic real environment. The study by Yalçin et al.[73] was fully simulated.
On the roof of a building on the campus of the National University of Singapore, they used a 260 W photovoltaic panel to which the 120 mm x 100 mm prototype was connected on its backside for testing in a real-world environment. The 300 W step-down converter-booster prototype was realized on the Artix-7 FPGA. A weather station was used to receive temperature and irradiance data. The DT model, the fault detection and identification methodology, as well as the fault library that was developed were implemented on the Artix-7 FPGA. In addition, they included the tracking of the MPP of the solar panel according to. [80]in the control logic.
In Hong et al. [77] the grid-connected PV system at Chung Yuan Christian University, Taoyuan, Taiwan was the object of study. But no tests were conducted in the real installation environment, all measurements and tests to demonstrate the effectiveness of the proposed fault classification detection study were carried out through Opal-RT together with MATLAB/Simulink.
The study by Yalçin et al.[73] was fully simulated as indicated in the article itself.
4.3.4.4. Results
In the real environment, the different types of faults that had been recorded in the fault library were tested, taking into account that the prototype fault detection and identification either in the PV panel, the converter or in the sensors (panel current, panel voltage and converter inductor current sensors), can only be done for the faults found in that library. The detection time for PV panel faults is the longest and the shortest detection time was due to sensor faults. In Jain et al. [76] a comparative table with other works is presented. The main conclusions they draw from that comparison is that the other works do not have a general application approach as it is in the case of Jain et al. [76] which can be applied to other energy conversion systems. And that the ability to detect and identify failures up to the date of the study (January 2020) no other studies have achieved. [81,82,83,84]. They further mention that such a DT model proposed in Jain et al. [76] is applicable to other energy systems.
With the simulation results of Hong et al. [77] showed that their proposed ConvMixer method for classifying faults in PV installations performs better than the random forest, the decision tree, as well as other CNN-based methods. In addition, it is highlighted that the computational cost of the proposed method compared to the other CNN methods is lower (ConvMixer training time required 30,057 min). In that paper, they mention that the proposed method is much better than the multivariate statistical technique proposed in Fadhel et al. (2019). Moreover, the obtained results show in the fault classification very good results in general (97.00 % in the accuracy tests), mentioning that there is a small confusion in the line-to-line faults and open-circuit faults in the panel, but that this does not influence in overall performance of the proposed model.
The simulation results of Yalçin et al.[73] in Matlab/Simulink of a 150 kW power PV plant were obtained the values of root mean square error (RMSE) and mean absolute error (MAE) for each ML model and for each part of the PV system or for each DT created, i.e., for the solar panel, the DC converter and the power grid. In the case of the PV panel, the performance of the panel is studied according to weather conditions. The deep regression neural network (DNN) model presents the lowest and the catboost the highest error in prediction. For the DC-DC converter taking into account the difficulty of modeling by ML models, the Random Forest (RF) model presented the best results, while in the case of DNN it was the opposite. For the part corresponding to the electrical network the inputs were the outputs of the DC converter, evaluating the output power of the system they obtained that the three methods are very good and had practically the same RMSE and MAE values. But in the latter case they chose the catboost, since they used the size, speed and complexity of the model as criteria. Table 4 shows a summary of what we have seen in this point.
4.4. Other applications
In addition to these specific application examples, digital twin technology is also used in more diverse and peculiar fields, although research in these areas is somewhat scarce at present.
Other application examples could be the use for indoor security management, such as the one proposed by Liu et al. In this model, an indoor security management framework that leverages Building Information Management (BIM) is proposed. It also integrates technologies such as Internet of Things (IoT). Indoor performance is monitored in real time with IoT sensors and reproduced in a 3D geometric model generated with BIM (Z. Liu et al., 2020). It can also be used to assist in supply chain management (Marmolejo-Saucedo, 2020) or mineral resource procurement (Dli et al., 2020).
Author Contributions
“Conceptualization, J.F.G.G., D.D.A and D.C.F.; methodology, D.D.A., M.C.G, J.A.A.M; formal analysis, J.F.G.G.; investigation, J.F.G.G, D.D.A., D.C.F.; resources, M.C.G., J.A.A.M., D.D.A.; data curation, D.D.A.; writing—original draft preparation, D.D. A.; writing—review and editing, D.D.A., J.F.G.G.; visualization, D.D.A., D.C.F.; supervision, J.F.G.G; project administration, D.C.F.; funding acquisition, J.F.G.G. All authors have read and agreed to the published version of the manuscript.
Funding
Please add: This research was funded by Ministerio de Ciencia e Innovación of Spain, grant number TED2021-132326B-I00 and “The APC was funded by this Project”.
Data Availability Statement
We have not any data because in this paper have not processed any data, only publications related to this topic.
Acknowledgments
We acknowledge the economic support to “Proyecto TED2021-132326B-I00, Proyectos Estratégicos Orientados a la «Transición Ecológica y a la Transición Digital», financiado por MCIN/AEI /10.13039/501100011033 y por la Unión Europea NextGenerationEU/ PRTR” .
Conflicts of Interest
The authors declare no conflicts of interest.
References
- X. Liu et al., “A systematic review of digital twin about physical entities, virtual models, twin data, and applications,” Advanced Engineering Informatics, vol. 55. Elsevier Ltd, Jan. 01, 2023. [CrossRef]
- C. Gehrmann and M. Gunnarsson, “A digital twin based industrial automation and control system security architecture,” IEEE Trans Industr Inform, vol. 16, no. 1, pp. 669–680, Jan. 2020. [CrossRef]
- W. Jia, W. Wang, and Z. Zhang, “From simple digital twin to complex digital twin part II: Multi-scenario applications of digital twin shop floor,” Advanced Engineering Informatics, vol. 56, Apr. 2023. [CrossRef]
- X. Liu, Y. Wang, R. C. H. Koo, and J. S. H. Kwan, “Development of a slope digital twin for predicting temporal variation of rainfall-induced slope instability using past slope performance records and monitoring data,” Eng Geol, vol. 308, Oct. 2022. [CrossRef]
- W. C. Sinke, “Development of photovoltaic technologies for global impact,” Renew Energy, vol. 138, pp. 911–914, Aug. 2019. [CrossRef]
- 2017, K. M. Alam and A. El Saddik, “C2PS: A digital twin architecture reference model for the cloud-based cyber-physical systems,” IEEE Access, vol. 5, pp. 2050–2062, 2017. [CrossRef]
- F. Mostafa, L. Tao, and W. Yu, “An effective architecture of digital twin system to support human decision making and AI-driven autonomy,” in Concurrency and Computation: Practice and Experience, John Wiley and Sons Ltd, Oct. 2021. [CrossRef]
- L. Wright and S. Davidson, “How to tell the difference between a model and a digital twin,” Adv Model Simul Eng Sci, vol. 7, no. 1, Dec. 2020. [CrossRef]
- Y. Wu, L. Zhou, P. Zheng, Y. Sun, and K. Zhang, “A digital twin-based multidisciplinary collaborative design approach for complex engineering product development,” Advanced Engineering Informatics, vol. 52, Apr. 2022. [CrossRef]
- M. Liu, S. Fang, H. Dong, and C. Xu, “Review of digital twin about concepts, technologies, and industrial applications,” J Manuf Syst, vol. 58, pp. 346–361, Jan. 2021. [CrossRef]
- G. Yu, S. Zhang, M. Hu, and Y. Ken Wang, “Prediction of highway tunnel pavement performance based on digital twin and multiple time series stacking,” Advances in Civil Engineering, vol. 2020, 2020. [CrossRef]
- N. Ariesen-Verschuur, C. Verdouw, and B. Tekinerdogan, “Digital Twins in greenhouse horticulture: A review,” Computers and Electronics in Agriculture, vol. 199. Elsevier B.V., Aug. 01, 2022. [CrossRef]
- Kampker, V. Stich, P. Jussen, B. Moser, and J. Kuntz, “Business models for industrial smart services - the example of a digital twin for a product-service-system for potato harvesting,” in Procedia CIRP, Elsevier B.V., 2019, pp. 534–540. [CrossRef]
- P. Verboven, T. Defraeye, A. K. Datta, and B. Nicolai, “Digital twins of food process operations: the next step for food process models?,” Current Opinion in Food Science, vol. 35. Elsevier Ltd, pp. 79–87, Oct. 01, 2020. [CrossRef]
- R. C. Luis J, B. J. José A, and S. T. Ian M Hernández L Jesús H, “Estudio del Algoritmo de Seguimiento de Punto de Máxima Potencia Perturbar y Observar,” 2010.
- N. Femia, G. Petrone, G. Spagnuolo, and M. Vitelli, “Optimizing Duty-cycle Perturbation of P&O MPPT Technique.”. [CrossRef]
- T. Esram and P. L. Chapman, “Comparison of photovoltaic array maximum power point tracking techniques,” IEEE Transactions on Energy Conversion, vol. 22, no. 2, pp. 439–449, Jun. 2007. [CrossRef]
- T. Esram, J. W. Kimball, P. T. Krein, P. L. Chapman, and P. Midya, “Dynamic maximum power point tracking of photovoltaic arrays using ripple correlation control,” IEEE Trans Power Electron, vol. 21, no. 5, pp. 1282–1290, 2006. [CrossRef]
- J. Kouta, A. El-Ali, N. Moubayed, and R. Outbib, “Improving the incremental conductance control method of a solar energy conversion system,” Renewable Energy and Power Quality Journal, vol. 1, no. 6, pp. 273–276, Mar. 2008. [CrossRef]
- N. Femia, G. Petrone, G. Spagnuolo, and M. Vitelli, “Optimization of perturb and observe maximum power point tracking method,” IEEE Trans Power Electron, vol. 20, no. 4, pp. 963–973, Jul. 2005. [CrossRef]
- E. Artetxe, J. Uralde, O. Barambones, I. Calvo, and I. Martin, “Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin,” Mathematics, vol. 11, no. 9, May 2023. [CrossRef]
- J. S. Ko, J. H. Huh, and J. C. Kim, “Overview of maximum power point tracking methods for PV system in micro grid,” Electronics (Switzerland), vol. 9, no. 5. MDPI AG, May 01, 2020. [CrossRef]
- J. Ahmed and Z. Salam, “An Enhanced Adaptive P&O MPPT for Fast and Efficient Tracking Under Varying Environmental Conditions,” IEEE Trans Sustain Energy, vol. 9, no. 3, pp. 1487–1496, Jul. 2018. [CrossRef]
- J. Macaulay and Z. Zhou, “A fuzzy logical-based variable step size P&O MPPT algorithm for photovoltaic system,” Energies (Basel), vol. 11, no. 6, Jun. 2018. [CrossRef]
- K. Wang, J. Ma, J. Wang, B. Xu, Y. Tao, and K. L. Man, “Digital Twin based Maximum Power Point Estimation for Photovoltaic Systems,” in Proceedings - International SoC Design Conference 2022, ISOCC 2022, Institute of Electrical and Electronics Engineers Inc., 2022, pp. 189–190. [CrossRef]
- M. Farhat, O. Barambones, and L. Sbita, “A real-time implementation of novel and stable variable step size MPPT,” Energies (Basel), vol. 13, no. 18, Sep. 2020. [CrossRef]
- E. Mendez, A. Ortiz, P. Ponce, I. Macias, D. Balderas, and A. Molina, “Improved MPPT algorithm for photovoltaic systems based on the earthquake optimization algorithm,” Energies (Basel), vol. 13, no. 12, Jun. 2020. [CrossRef]
- T. S. Ajani, A. L. Imoize, and A. A. Atayero, “An overview of machine learning within embedded and mobile devices-optimizations and applications,” Sensors, vol. 21, no. 13. MDPI AG, Jul. 01, 2021. [CrossRef]
- C. Li, Y. Chen, D. Zhou, J. Liu, and J. Zeng, “A high-performance adaptive incremental conductance MPPT algorithm for photovoltaic systems,” Energies (Basel), vol. 9, no. 4, Apr. 2016. [CrossRef]
- P. Kofinas, S. Doltsinis, A. I. Dounis, and G. A. Vouros, “A reinforcement learning approach for MPPT control method of photovoltaic sources,” Renew Energy, vol. 108, pp. 461–473, 2017. [CrossRef]
- K. Y. Chou, S. T. Yang, and Y. P. Chen, “Maximum power point tracking of photovoltaic system based on reinforcement learning,” Sensors (Switzerland), vol. 19, no. 22, Nov. 2019. [CrossRef]
- B. C. Phan, Y. C. Lai, and C. E. Lin, “A deep reinforcement learning-based MPPT control for PV systems under partial shading condition,” Sensors (Switzerland), vol. 20, no. 11, Jun. 2020. [CrossRef]
- M. Nicola, C. I. Nicola, and D. Selișteanu, “Improvement of the Control of a Grid Connected Photovoltaic System Based on Synergetic and Sliding Mode Controllers Using a Reinforcement Learning Deep Deterministic Policy Gradient Agent,” Energies (Basel), vol. 15, no. 7, Apr. 2022. [CrossRef]
- M. Humada, M. Hojabri, S. Mekhilef, and H. M. Hamada, “Solar cell parameters extraction based on single and double-diode models: A review,” Renewable and Sustainable Energy Reviews, vol. 56. Elsevier Ltd, pp. 494–509, Apr. 01, 2016. [CrossRef]
- K. Wang, J. Ma, K. L. Man, K. Huang, and X. Huang, “Sim-to-Real Transfer with Domain Randomization for Maximum Power Point Estimation of Photovoltaic Systems,” in 21st IEEE International Conference on Environment and Electrical Engineering and 2021 5th IEEE Industrial and Commercial Power System Europe, EEEIC / I and CPS Europe 2021 - Proceedings, Institute of Electrical and Electronics Engineers Inc., 2021. [CrossRef]
- K. Wang, J. Ma, K. L. Man, D. Hong, K. Huang, and X. Huang, “Real-time Modeling of Photovoltaic Strings under Partial Shading Conditions,” in Proceedings of 2021 IEEE 10th Data Driven Control and Learning Systems Conference, DDCLS 2021, Institute of Electrical and Electronics Engineers Inc., May 2021, pp. 1345–1349. [CrossRef]
- T. P. Lillicrap et al., “Continuous control with deep reinforcement learning,” 2015. [Online]. Available: https://www.researchgate.net/publication/281670459.
- Raj and M. Gupta, “Numerical Simulation and Performance Assessment of ANN-INC Improved Maximum Power Point Tracking System for Solar Photovoltaic System Under Changing Irradiation Operation,” 2021. [Online]. Available: http://annalsofrscb.ro790.
- X. Fang, S. Misra, G. Xue, and D. Yang, “Smart grid - The new and improved power grid: A survey,” IEEE Communications Surveys and Tutorials, vol. 14, no. 4. Institute of Electrical and Electronics Engineers Inc., pp. 944–980, 2012. [CrossRef]
- Y. Wang et al., “The Wind and Photovoltaic Power Forecasting Method Based on Digital Twins,” Applied Sciences (Switzerland), vol. 13, no. 14, Jul. 2023. [CrossRef]
- F. Delussu, D. Manzione, R. Meo, G. Ottino, and M. Asare, “Experiments and Comparison of Digital Twinning of Photovoltaic Panels by Machine Learning Models and a Cyber-Physical Model in Modelica,” IEEE Trans Industr Inform, vol. 18, no. 6, pp. 4018–4028, Jun. 2022. [CrossRef]
- D. V. Pombo, P. Bacher, C. Ziras, H. W. Bindner, S. V. Spataru, and P. E. Sørensen, “Benchmarking physics-informed machine learning-based short term PV-power forecasting tools,” Energy Reports, vol. 8, pp. 6512–6520, Nov. 2022. [CrossRef]
- M. Cordeiro-Costas, D. Villanueva, P. Eguía-Oller, and E. Granada-Álvarez, “Machine Learning and Deep Learning Models Applied to Photovoltaic Production Forecasting,” Applied Sciences (Switzerland), vol. 12, no. 17, Sep. 2022. [CrossRef]
- S. Muzaffar and A. Afshari, “Short-term load forecasts using LSTM networks,” in Energy Procedia, Elsevier Ltd, 2019, pp. 2922–2927. [CrossRef]
- H. Choi, S. Ryu, and H. Kim, “Short-Term Load Forecasting based on ResNet and LSTM,” in 2018 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids, SmartGridComm 2018, Institute of Electrical and Electronics Engineers Inc., Dec. 2018. [CrossRef]
- Y. Tian, D. Wang, G. Zhou, J. Wang, S. Zhao, and Y. Ni, “An Adaptive Hybrid Model for Wind Power Prediction Based on the IVMD-FE-Ad-Informer,” Entropy, vol. 25, no. 4, Apr. 2023. [CrossRef]
- K. Poczeta and E. I. Papageorgiou, “Energy Use Forecasting with the Use of a Nested Structure Based on Fuzzy Cognitive Maps and Artificial Neural Networks,” Energies (Basel), vol. 15, no. 20, Oct. 2022. [CrossRef]
- G. G. Dranka, P. Ferreira, and A. I. F. Vaz, “Integrating supply and demand-side management in renewable-based energy systems,” Energy, vol. 232, Oct. 2021. [CrossRef]
- M. Dabbaghjamanesh, A. Moeini, and A. Kavousi-Fard, “Reinforcement Learning-Based Load Forecasting of Electric Vehicle Charging Station Using Q-Learning Technique,” IEEE Trans Industr Inform, vol. 17, no. 6, pp. 4229–4237, Jun. 2021. [CrossRef]
- H. Chen, Y. Li, R. H. Y. Louie, and B. Vucetic, “Autonomous demand side management based on energy consumption scheduling and instantaneous load billing: An aggregative game approach,” IEEE Trans Smart Grid, vol. 5, no. 4, pp. 1744–1754, 2014. [CrossRef]
- T. Ma, W. Pei, H. Xiao, L. Kong, Y. Mu, and T. Pu, “The energy management strategies based on dynamic energy pricing for community integrated energy system considering the interactions between suppliers and users,” Energy, vol. 211, Nov. 2020. [CrossRef]
- G. Yuan and F. Xie, “Digital Twin-Based economic assessment of solar energy in smart microgrids using reinforcement learning technique,” Solar Energy, vol. 250, pp. 398–408, Jan. 2023. [CrossRef]
- J. M. Veras et al., “A multi-objective demand response optimization model for scheduling loads in a home energy management system,” Sensors (Switzerland), vol. 18, no. 10, Oct. 2018. [CrossRef]
- Q. Lu, S. Lü, Y. Leng, and Z. Zhang, “Optimal household energy management based on smart residential energy hub considering uncertain behaviors,” Energy, vol. 195, Mar. 2020. [CrossRef]
- W. Li, D. Cheng, R. Bian, S. Ishak, and O. A. Osman, “Accounting for travel time reliability, trip purpose and departure time choice in an agent-based dynamic toll pricing approach,” IET Intelligent Transport Systems, vol. 12, no. 1, pp. 58–65, Feb. 2018. [CrossRef]
- K. Bellinguer, R. Girard, G. Bontron, and G. Kariniotakis, “A generic methodology to efficiently integrate weather information in short-term Photovoltaic generation forecasting models,” Solar Energy, vol. 244, pp. 401–413, Sep. 2022. [CrossRef]
- Al-Isawi, L. H. Amirah, O. A. Al-Mufti, and C. Ghenai, “Digital Twinning and LSTM-based Forecasting Model of Solar PV Power Output,” in 2023 Advances in Science and Engineering Technology International Conferences, ASET 2023, Institute of Electrical and Electronics Engineers Inc., 2023. [CrossRef]
- Güngör, B. Akşanlı, and R. Aydoğan, “Algorithm selection and combining multiple learners for residential energy prediction,” Future Generation Computer Systems, vol. 99, pp. 391–400, Oct. 2019. [CrossRef]
- R. Nasyrov, M. F. Ṭulbah, Moscow Power Engineering Institute, IEEE Industry Applications Society, and Institute of Electrical and Electronics Engineers., Proceedings of the 2nd 2020 International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE) : March 12-14, 2020, Moscow, Russia 2020.
- V. Goel, J. Weng, and P. Poupart, “Unsupervised Video Object Segmentation for Deep Reinforcement Learning,” May 2018, [Online]. Available: http://arxiv.org/abs/1805.07780.
- L. Zhu, K. Huang, Y. Hu, and X. Tai, “A Self-Adapting Task Scheduling Algorithm for Container Cloud Using Learning Automata,” IEEE Access, vol. 9, pp. 81236–81252, 2021. [CrossRef]
- J. Chand Bansal et al., “Algorithms for Intelligent Systems Series Editors: Applications of Artificial Intelligence in Engineering Proceedings of First Global Conference on Artificial Intelligence and Applications (GCAIA 2020).” [Online]. Available: http://www.springer.com/series/16171.
- M. Bazzi, K. A. Kim, B. B. Johnson, P. T. Krein, and A. Dominguez-García, “Fault impacts on solar power unit reliability,” in Conference Proceedings - IEEE Applied Power Electronics Conference and Exposition - APEC, 2011, pp. 1223–1231. [CrossRef]
- M. Köntges, Assessment of Photovoltaic Module Failures in the Field.
- E. Jamshidpour, P. Poure, and S. Saadate, “Photovoltaic Systems Reliability Improvement by Real-Time FPGA-Based Switch Failure Diagnosis and Fault-Tolerant DC-DC Converter,” IEEE Transactions on Industrial Electronics, vol. 62, no. 11, pp. 7247–7255, Nov. 2015. [CrossRef]
- J. Poon, P. Jain, I. C. Konstantakopoulos, C. Spanos, S. K. Panda, and S. R. Sanders, “Model-based fault detection and identification for switching power converters,” in IEEE Transactions on Power Electronics, Institute of Electrical and Electronics Engineers Inc., Feb. 2017, pp. 1419–1430. [CrossRef]
- K. A. Kim, G. S. Seo, B. H. Cho, and P. T. Krein, “Photovoltaic Hot-Spot Detection for Solar Panel Substrings Using AC Parameter Characterization,” IEEE Trans Power Electron, vol. 31, no. 2, pp. 1121–1130, Feb. 2016. [CrossRef]
- S. Yang, D. Xiang, A. Bryant, P. Mawby, L. Ran, and P. Tavner, “Condition monitoring for device reliability in power electronic converters: A review,” IEEE Transactions on Power Electronics, vol. 25, no. 11. pp. 2734–2752, 2010. [CrossRef]
- W. Huai et al., “Transitioning to physics-of-failure as a reliability driver in power electronics,” IEEE J Emerg Sel Top Power Electron, vol. 2, no. 1, pp. 97–114, Mar. 2014. [CrossRef]
- Mellit, G. M. Tina, and S. A. Kalogirou, “Fault detection and diagnosis methods for photovoltaic systems: A review,” Renewable and Sustainable Energy Reviews, vol. 91. Elsevier Ltd, pp. 1–17, Aug. 01, 2018. [CrossRef]
- Mellit and S. Kalogirou, “Artificial intelligence and internet of things to improve efficacy of diagnosis and remote sensing of solar photovoltaic systems: Challenges, recommendations and future directions,” Renewable and Sustainable Energy Reviews, vol. 143. Elsevier Ltd, Jun. 01, 2021. [CrossRef]
- D. S. Pillai and N. Rajasekar, “A comprehensive review on protection challenges and fault diagnosis in PV systems,” Renewable and Sustainable Energy Reviews, vol. 91. Elsevier Ltd, pp. 18–40, Aug. 01, 2018. [CrossRef]
- T. Yalçin, P. Paradell Solà, P. Stefanidou-Voziki, J. L. Domínguez-García, and T. Demirdelen, “Exploiting Digitalization of Solar PV Plants Using Machine Learning: Digital Twin Concept for Operation,” Energies (Basel), vol. 16, no. 13, Jul. 2023. [CrossRef]
- Y. Zheng, S. Yang, and H. Cheng, “An application framework of digital twin and its case study,” J Ambient Intell Humaniz Comput, vol. 10, no. 3, pp. 1141–1153, Mar. 2019. [CrossRef]
- V. H. Nguyen, Q. T. Tran, Y. Besanger, M. Jung, and T. L. Nguyen, “Digital twin integrated power-hardware-in-the-loop for the assessment of distributed renewable energy resources,” Electrical Engineering, vol. 104, no. 2, pp. 377–388, Apr. 2022. [CrossRef]
- P. Jain, J. Poon, J. P. Singh, C. Spanos, S. R. Sanders, and S. K. Panda, “A digital twin approach for fault diagnosis in distributed photovoltaic systems,” IEEE Trans Power Electron, vol. 35, no. 1, pp. 940–956, Jan. 2020. [CrossRef]
- Y. Y. Hong and R. A. Pula, “Diagnosis of PV faults using digital twin and convolutional mixer with LoRa notification system,” Energy Reports, vol. 9, pp. 1963–1976, Dec. 2023. [CrossRef]
- M. Kasper, D. Bortis, and J. W. Kolar, “Classification and comparative evaluation of PV panel-integrated DC-DC converter concepts,” IEEE Trans Power Electron, vol. 29, no. 5, pp. 2511–2526, May 2014. [CrossRef]
- erpiñan, E. Lorenzo, and M. A. Castro, “On the calculation of energy produced by a PV grid-connected system,” Progress in Photovoltaics: Research and Applications, vol. 15, no. 3, pp. 265–274, May 2007. [CrossRef]
- L. Linares, R. W. Erickson, S. Macalpine, and M. Brandemuehl, “Improved Energy Capture in Series String Photovoltaics via Smart Distributed Power Electronics.”. [CrossRef]
- S. Karimi, A. Gaillard, P. Poure, and S. Saadate, “FPGA-based real-time power converter failure diagnosis for wind energy conversion systems,” IEEE Transactions on Industrial Electronics, vol. 55, no. 12, pp. 4299–4308, 2008. [CrossRef]
- Ben Youssef, S. K. El Khil, and I. Slama-Belkhodja, “State observer-based sensor fault detection and isolation, and fault tolerant control of a single-phase PWM rectifier for electric railway traction,” IEEE Trans Power Electron, vol. 28, no. 12, pp. 5842–5853, 2013. [CrossRef]
- J. Solórzano and M. A. Egido, “Automatic fault diagnosis in PV systems with distributed MPPT,” Energy Convers Manag, vol. 76, pp. 925–934, 2013. [CrossRef]
- S. Nie, X. Pei, Y. Chen, and Y. Kang, “Fault diagnosis of PWM DC-DC converters based on magnetic component voltages equation,” IEEE Trans Power Electron, vol. 29, no. 9, pp. 4978–4998, 2014. [CrossRef]
Figure 1.
Electrical diagram of the single-diode model. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
Figure 1.
Electrical diagram of the single-diode model. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
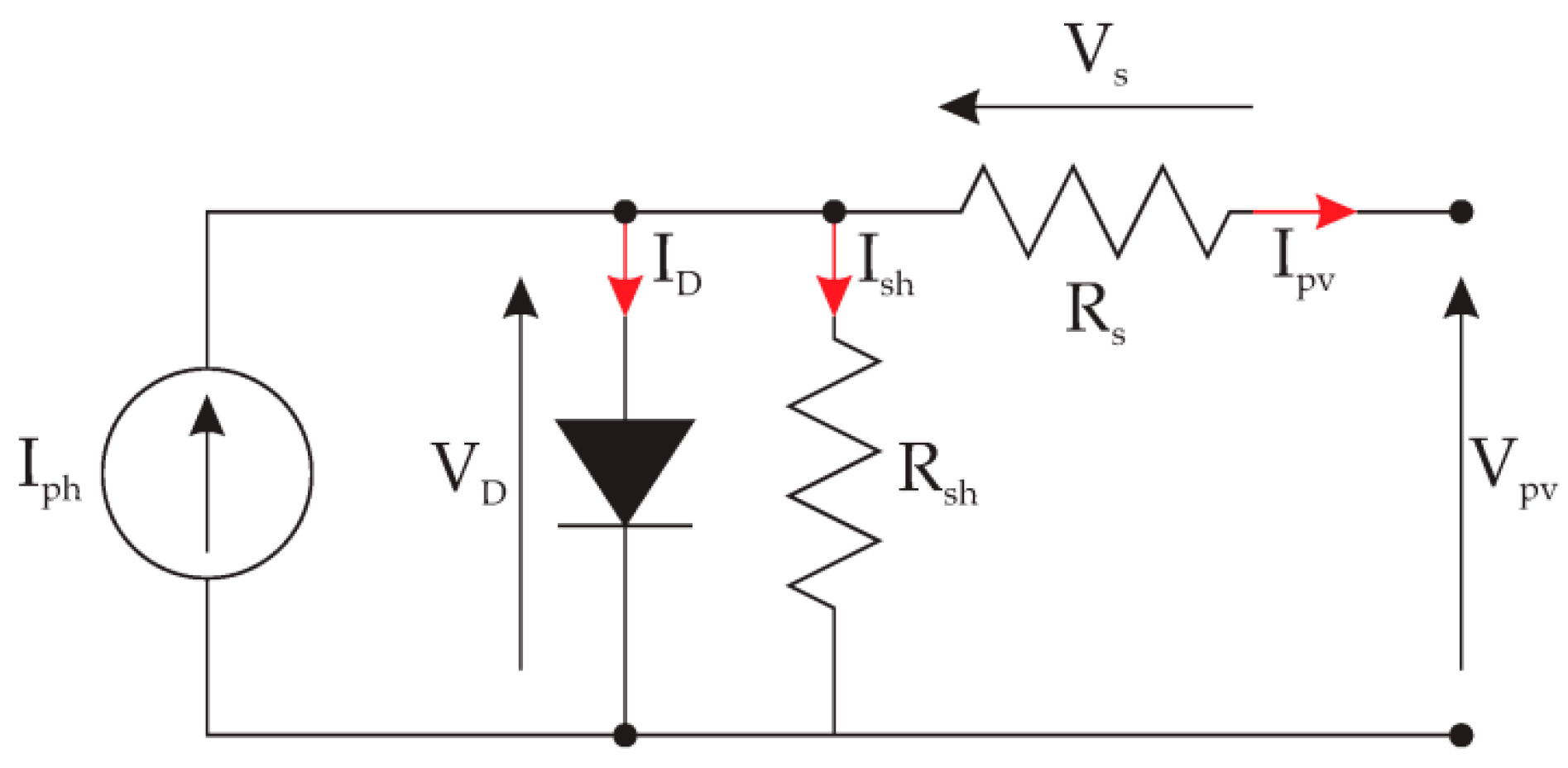
Figure 2.
Schematic diagram of the proposed MPPE system. Source: Digital Twin based Maximum Power Point Estimation for Photovoltaic Systems.
Figure 2.
Schematic diagram of the proposed MPPE system. Source: Digital Twin based Maximum Power Point Estimation for Photovoltaic Systems.
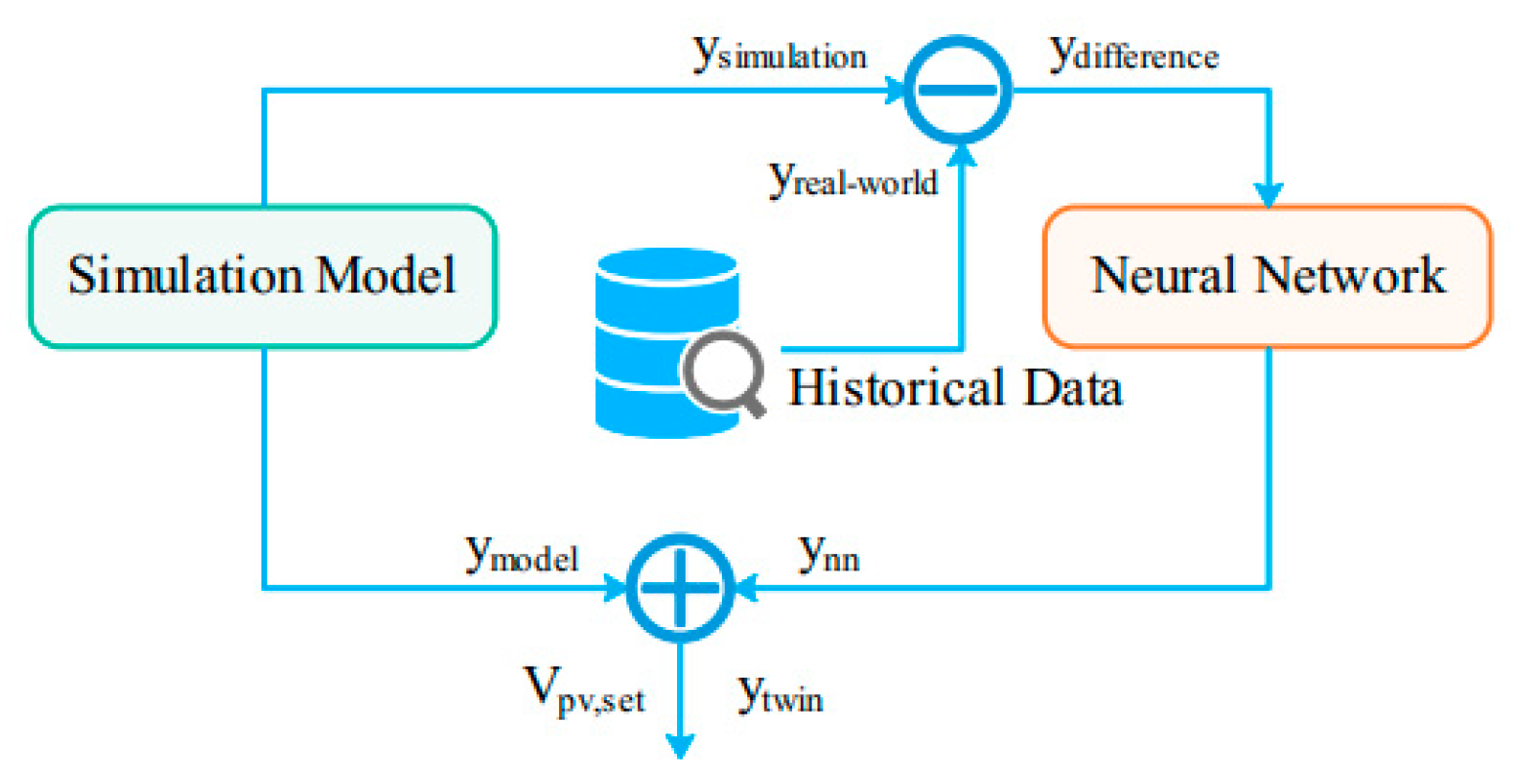
Figure 3.
Block diagram of the simulation (training of the RL DDPG agent) with Digital Twin. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
Figure 3.
Block diagram of the simulation (training of the RL DDPG agent) with Digital Twin. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
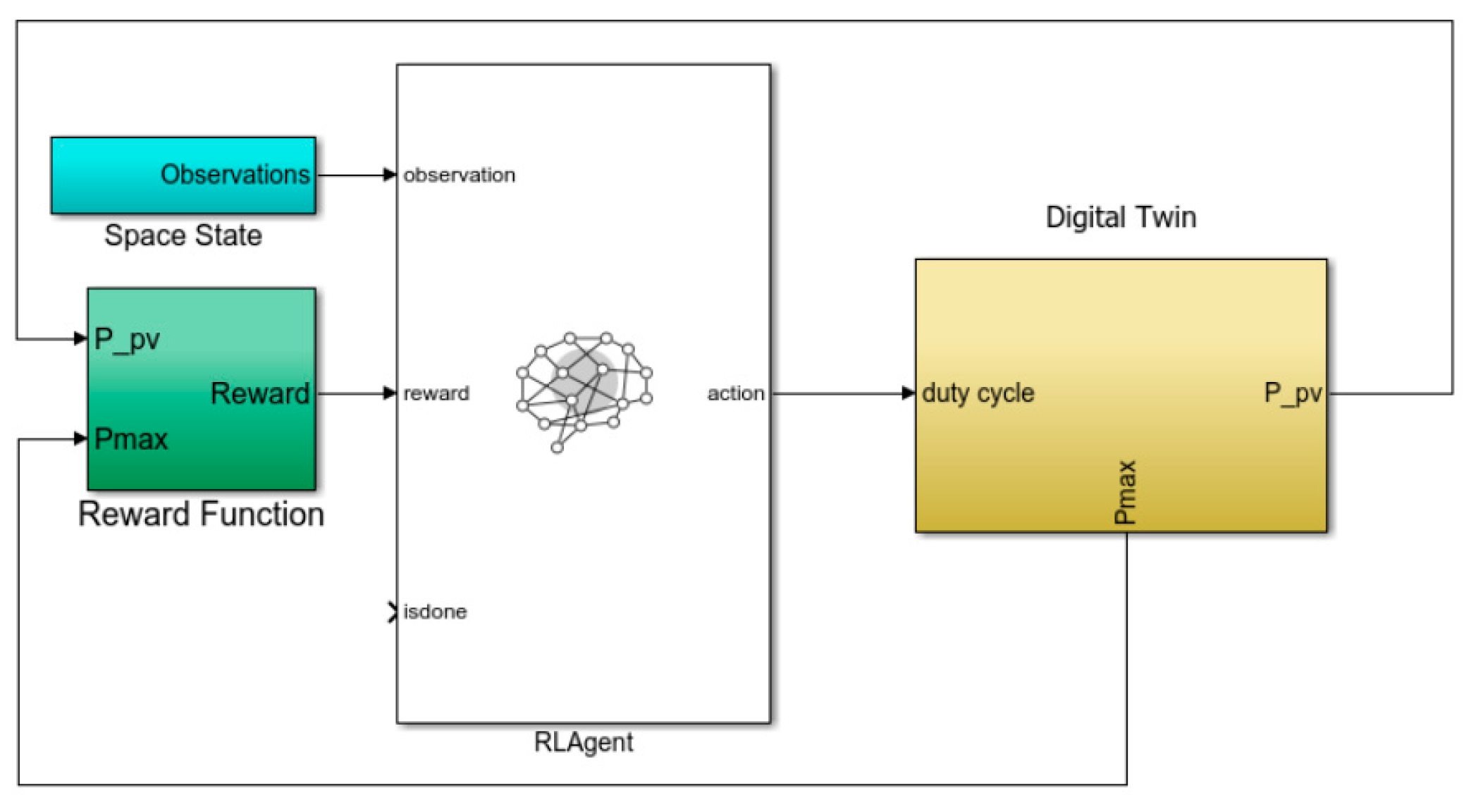
Figure 4.
Hardware implementation scheme. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
Figure 4.
Hardware implementation scheme. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
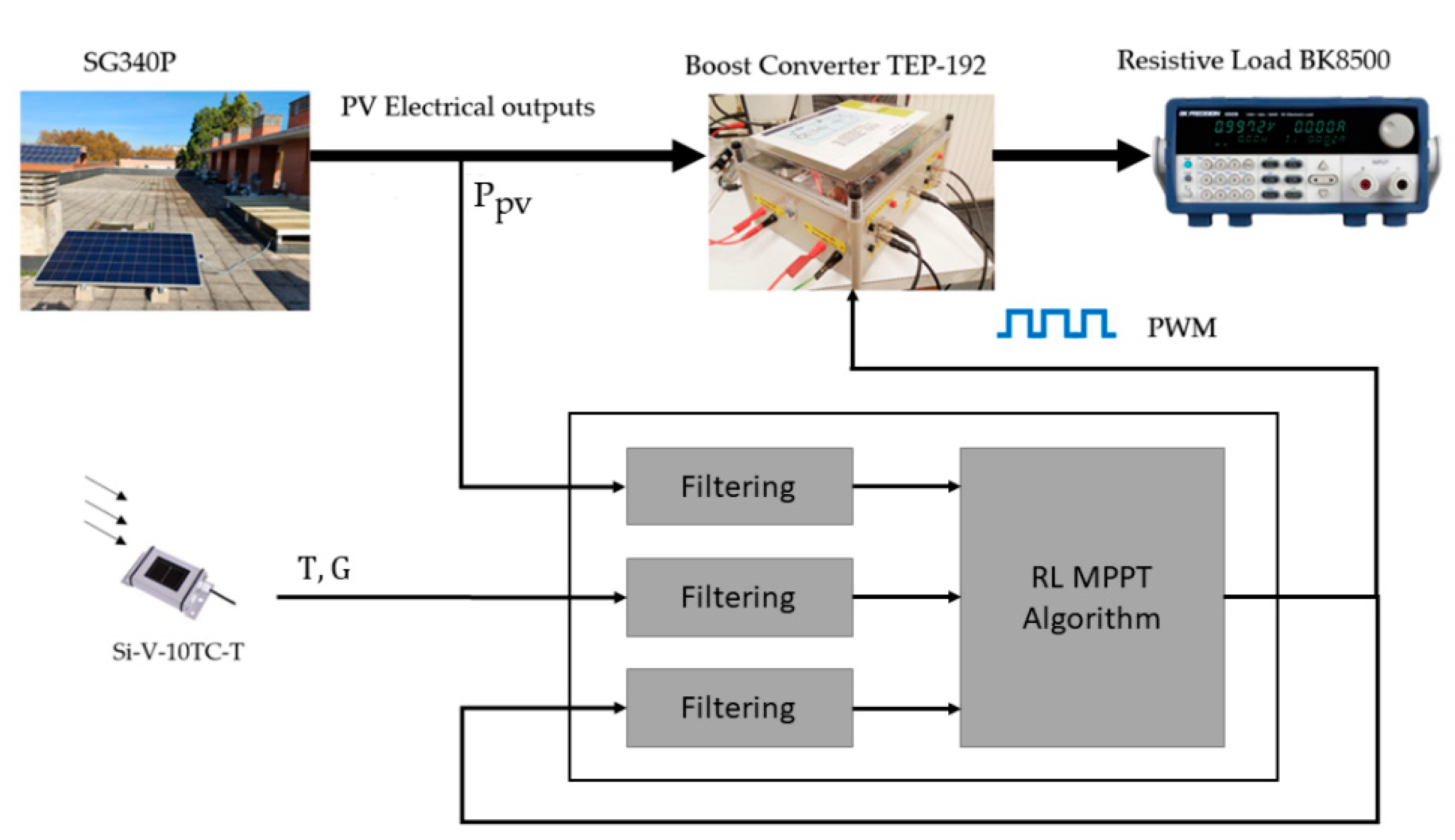
Figure 5.
Peak power tracking with DDPG and P&O under constant temperature and variable irradiance. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
Figure 5.
Peak power tracking with DDPG and P&O under constant temperature and variable irradiance. Source: Maximum Power Point Tracker Controller for Solar Photovoltaic Based on Reinforcement Learning Agent with a Digital Twin.
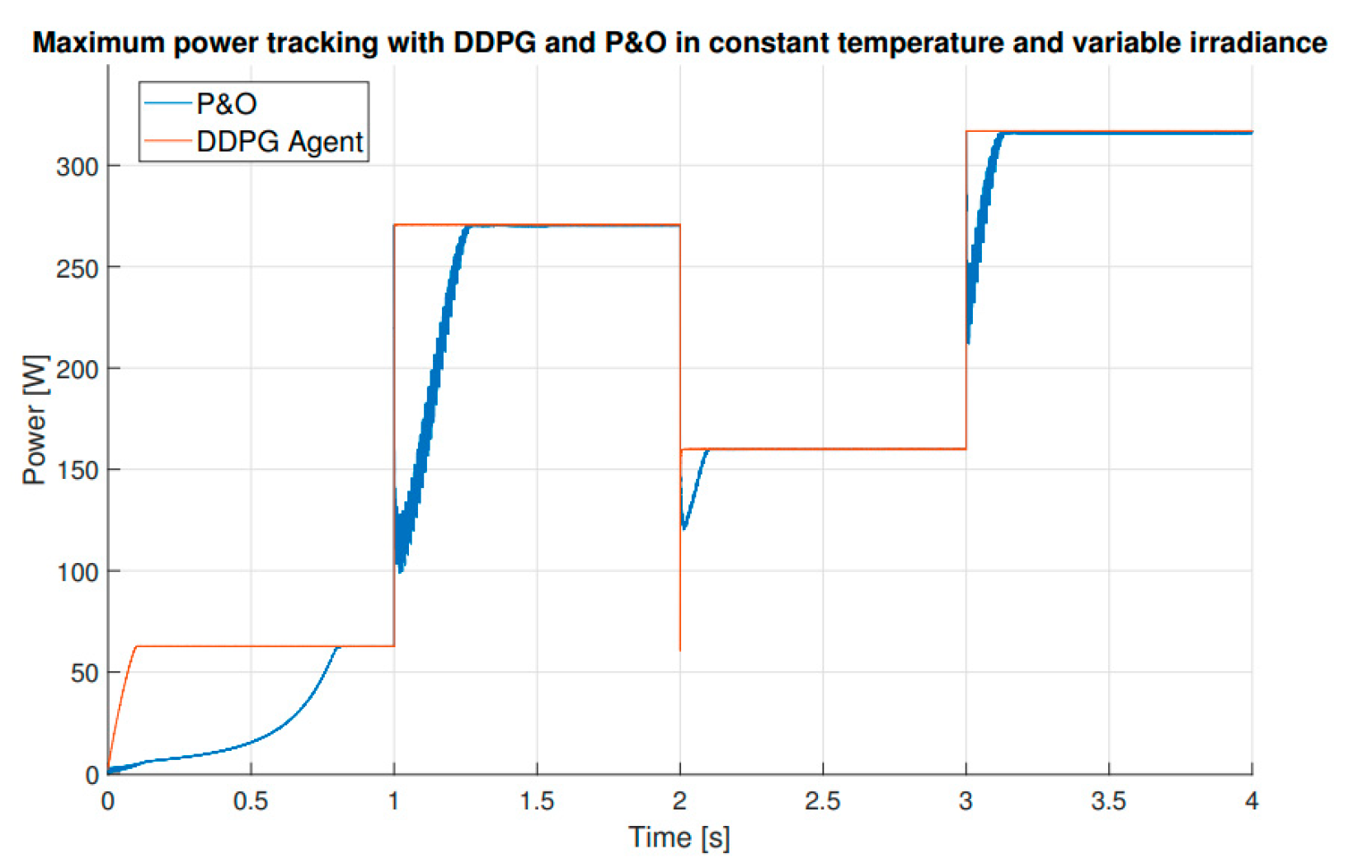
Figure 6.
Maximum power tracking with DDPG and P&O under constant irradiance and varia-ble temperature. Source: Maximum Power Point Tracker Controller for Solar Photo-voltaic Based on Reinforcement Learning Agent with a Digital Twin.
Figure 6.
Maximum power tracking with DDPG and P&O under constant irradiance and varia-ble temperature. Source: Maximum Power Point Tracker Controller for Solar Photo-voltaic Based on Reinforcement Learning Agent with a Digital Twin.
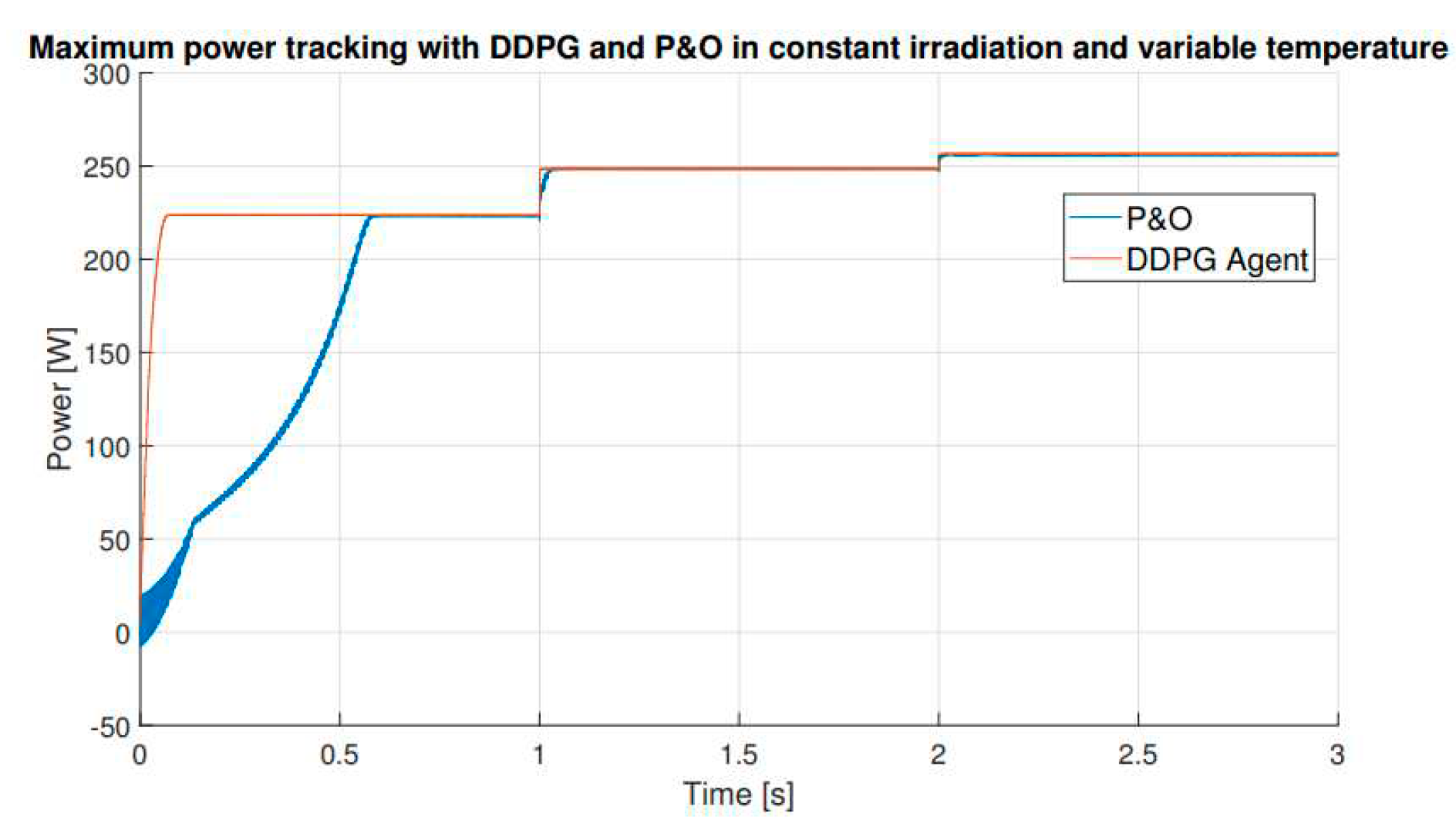
Figure 7.
DT visualization platform. Source: The Wind and Photovoltaic Power Forecasting Method Based on Digital Twins.
Figure 7.
DT visualization platform. Source: The Wind and Photovoltaic Power Forecasting Method Based on Digital Twins.
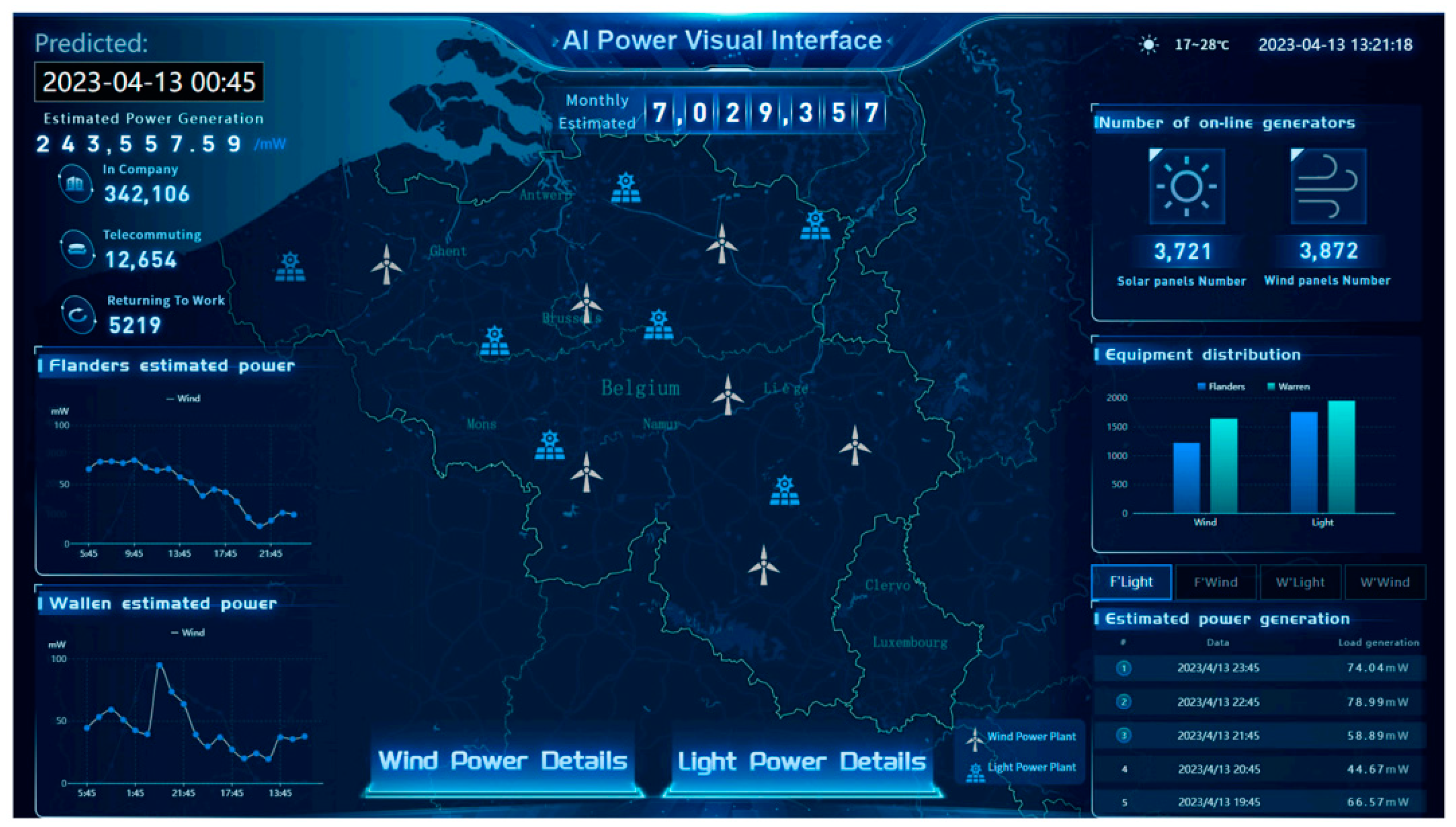

Table 1.
Optimization of the Maximum Power Point search.
| Reference | Photovoltaic system under study | Input data to the DT | Sensors for input data | Mathematical equations in the DT model | DT Model | Data output from the DT | Neural Network Models in Simulation | Tests in a real environment | Result |
| [21]. | A photovoltaic panel. | Temperature and irradiance. | Yes (irradiance and temperature sensor). | Yes. | Mathematical modeling in MATLAB/Simulink. | Photovoltaic module power. | Training of the reinforcement learning (RL) method with the DDPG agent. | A solar panel together with a boost converter and a variable resistor. | Estimation of the maximum power point of a solar panel. |
| [25]. | String of photovoltaic panels. | Temperature and irradiance. | Yes (PROVA photovoltaic system analyzer). | No. | Renewable energy block diagram, MATLAB/Simulink Simscape Electrical and a neural network. | String voltage at maximum power point. | Training of a neural network (the article only mentions a neural network, without providing further details). | String of three and five photovoltaic strings. | Estimation of the Global Maximum Power Point (GMPP). |
Table 2.
Power prediction.
| Reference | Photovoltaic system under study | Input data to the DT | Sensors for input data | Mathematical equations in the DT model | DT Model | Data output from the DT | Neural Network Models in Simulation | Tests in a real environment | Result |
| [40]. | Grid-connected photovoltaic installation. | 1.History of actual photovoltaic and wind power at the national level from the national database. 2.Historical temperature and irradiance data at the national level from the national database. |
No. | No. | Wind and photovoltaic power forecasting platform at regional level, for two regions in Belgium. | 1.3D model of the photovoltaic and wind power plant. 2.Intuitive interface with prediction results. |
WPNet, LSTM, CNN, Attention, and Transformer models. | No. | 1.Prediction of wind and photovoltaic generation for a specified date for two regions of Belgium. 2. Development of a WPNet proprietary forecasting model. |
| [41]. | A solar panel. | Ambient temperature, the magnitude of the wind speed and incident solar radiation. | No. | Yes. | Physical-numerical model built in Modelica. | Panel current, panel voltage and power. | Long-term memory network model LSTM. | No. | Simulation and prediction of the energy produced by photovoltaic panels. |
Table 3.
Energy management in buildings.
| Reference | Photovoltaic system under study | Input data to the DT | Sensors for input data | Mathematical equations in the DT model | DT Model | Data output from the DT | Neural Network Models in Simulation | Tests in a real environment | Result |
| [52]. | Smart Home with grid-connected photovoltaic system. | Solar radiation and temperature estimated using the Beta distribution function with historical data over one year of radiation and temperature. | No. | Yes. | Multi-layer DT model in Smart Grid. Electrical Digital Twin (top layer) represents the electrical control center and Home Digital Twin (bottom layer) represents the digital replication of the Smart Home devices. | Estimated Smart Home photovoltaic power. | RL model, LA and the GWOA algorithm. | No. All results were performed in simulation. | Algorithm for scheduling the operation of residential loads with the lowest electrical cost. |
| [57]. | Grid-connected photovoltaic installation | Temperature and irradiance. | Yes (Profitest measuring device). | No. | Renewable energy block diagram, MATLAB/Simulink Simscape Electrical. | Predicted photovoltaic power. | LSTM model. | Photovoltaic system with two 335 W panels in series | Balance of energy generation (solar photovoltaic) and demand (building energy consumption). |
Table 4.
Fault Detection in Distributed Photovoltaic Systems.
| Reference | Photovoltaic system under study | Input data to the DT | Sensors for input data | Mathematical equations in the DT model | DT Model | Data output from the DT | Fault detection | Failure classification | Neural Network Models in Simulation | Tests in a real environment | Result |
| [76]. | Complete PVECU photovoltaic energy conversion unit (a photovoltaic panel together with a power converter). | Temperature and solar irradiance. |
Yes (pyranometer and temperature sensor). | Yes. | Mathematical modeling of the entire system in MATLB/Simulink. | Panel current, panel voltage and DC converter inductor current. | Comparison of the response of the real system and the DT. | Creation of a fault library with simulation results. | Simulation was performed in MATLB/Simulink without using neural networks. | A PVECU unit on the roof of a building on the campus of the National University of Singapore. | Developed and designed a prototype source-level power converter to create a fault detection and identification system for a distributed photovoltaic system. |
| [77]. | Grid-connected 49 kW photovoltaic system. | Temperature and solar irradiance. | Yes (data from the Opal-RT eMegasim real-time simulator). | Yes. | Mathematical modeling of the whole system in Python. | Photovoltaic power. | Comparison of the response of the real system and the DT. | Training of neural networks in MATLAB/Simulink. | A novel Deep Learning ConvMixer method has been developed to classify faults. | No. The Opal-RT eMegasim real-time simulator has been used to validate the results. | Detection, classification and warning system for PV failures. As well as development of a new Deep Leraning method (ConvMixer) for fault classification. |
| [73]. | 150 kW photovoltaic plant connected to the grid. | Historical temperature and irradiance data from the PVGIS database. | No. | No. | DT of each part of the PV system (solar panel, DC converter and final output power of the system or grid) with blocks in MATLB/Simulink Simscape Electrical. | Predicted photovoltaic power. | Comparison of the response of the real system and the DT. | Training of neural networks in MATLAB/Simulink. | Regression models are Deep Neural Networks (DNN), Random Forest (RF) and CatBoost. | No. | Visualization platform with operation and maintenance information for each DT of the photovoltaic installation. The performance of the photovoltaic system is predicted. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



