
Submitted:
24 January 2024
Posted:
25 January 2024
You are already at the latest version
Abstract
Fully mechanized mining face production involves complex geological conditions; mining pressure; gas, water, fire and other mining environments. The working face needs a shearer, hydraulic support, a scraper conveyor and other equipment for coordination. The deep integration of intelligent technology with factors such as "humans, machines, the environment, and management" in the workplace is the core content of intelligent coal mines. This paper puts forward an advanced framework for coal mining robot technology systems, including single robots, robotized equipment, robot clusters and unmanned systems. The framework clarifies the common key technologies of coal mining robot research and development and cross-integration with new technologies such as 5G, the industrial internet, big data, artificial intelligence, and digital twins to improve the autonomous and intelligent application of coal mining robots. By establishing a scientific and complete standard system for coal mining robots, we aim to achieve customized research and development and standardized production of various types of robots. A specific analysis was conducted on the research progress of common key technologies such as explosion-proof design, mechanical system innovation, power drive, intelligent sensing, positioning and navigation, and underground communication of coal mining robots. The current research and application status of various types of coal mining robots in China are summarized. A new direction for future coal mine robot research and development is proposed. Moreover, robotic mining systems should be promoted to enhance the overall intelligence level and mining efficiency of mining equipment. To develop human‒machine environment-integrated robots to improve the autonomy and collaboration level of coal mining robots. The digital twinning of the entire mine robot system should be accelerated, the normalized operation level of coal mine robots should be improved, research on coal mining robots, support robots, and transportation robots should be carried out, intelligence should be achieved in fully mechanized mining faces, and equipment support for fewer and unmanned fully mechanized mining faces should be provided. The practical process of implementing coal mining robotization has been summarized, and the technical and engineering feasibility of the coal mining machine population has been verified.
Keywords:
Coal mining
; Robot swarm
; Intelligent system
; Architecture
; Control strategy
1. Introduction
Since 2014, fully mechanized mining equipment automation and information technology have been adopted for Huangling Mining No.1 The Mine of Shaanxi Coal and Chemical Industry Group in Shaanxi Province of China used the visual remote intervention mining mode of ‘unmanned operation and patrol’. There are more than 500 intelligent mining faces in China [1]. Most of these fully mechanized mining working faces have good geological conditions. When encountering complex geological conditions, various equipment companies have begun to try to use robot technology to solve the adaptability problem in mining environments. Although inspection robots have been used to monitor the production process of fully mechanized mining faces, they have not yet been integrated into the entire fully mechanized mining automation control system. The three machines used in comprehensive mining can be rotated to form a group of comprehensive mining robots, including mining robots, support robots, transportation robots, and inspection robots; this approach is a future solution suitable for the complex giant systems of comprehensive mining production in most coal mines in China. Based on the analysis of the problems that arise in the current intelligent process of fully mechanized mining, this article proposes building a machine crowd system with a coal mining robot group as the core and studying the cooperative control strategy of machine crowds. This includes using inertial navigation devices to solve the straightness problem of the working face, conducting research on the sliding control of scraper conveyors, and conducting research on inspection robots to achieve the goals of coal mining machines. The autonomous operation and multimachine cooperative linkage operation of comprehensive mining production equipment, such as hydraulic supports and conveyors, and a summary of the practical process of implementing coal mining robotization.
2. Current situation of intelligent mining robots at home and abroad
2.1. Current status of foreign coal mine robot technology
After the realization of mechanization and digitization, coal mining will enter a new stage of robotization. The foreign mining industry has developed a variety of mining robots to achieve coal mining, support, anchor protection and rescue functions and other production safety functions. Then, the transformation of traditional mining models (that is, unknown coal and rock and unchanged machinery) to intelligent mining models (that is, transparent coal and rock and self-adapting machinery) should be promoted.
Research on coal mining robots abroad has focused mainly on developed countries such as the United States, Germany, and Japan, and the representative research results are as follows:
(1) The White Oak Coal Mine in the United States has achieved a planned shearer, significantly improving her work efficiency and programmable operation capabilities. The coal mining robot adopts a wheeled walking and robotic arm mining method, which can complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
Figure 1.
Realistic view of the working face in the White Oak Coal Mine.

(2) German coal mining robot. The German Bosch company developed a coal mining robot that uses wheeled walking and mechanical arm mining and can complete the entire mining process. The robot also has the functions of autonomous control and autonomous navigation and can independently plan the coal mining route according to the situation of the mine to improve the efficiency of coal mining. In addition, the robot also uses advanced sensing technologies such as LIDAR and infrared cameras to measure and detect the internal environment of the mine with high precision.
(3) Japanese coal mining robot. The Robotics Institute of the University of Tokyo in Japan developed a coal mining robot that adopts the methods of caterpillar walking and mechanical arm mining and can complete the entire coal mining process. The robot also has the functions of autonomous control and autonomous navigation and can independently plan the coal mining route according to the situation of the mine to improve the efficiency of coal mining. In addition, the robot also uses ultrasonic sensing technology, which can measure and detect the internal environment of the mine with high precision.
2.2. Current status of domestic coal mine robot technology
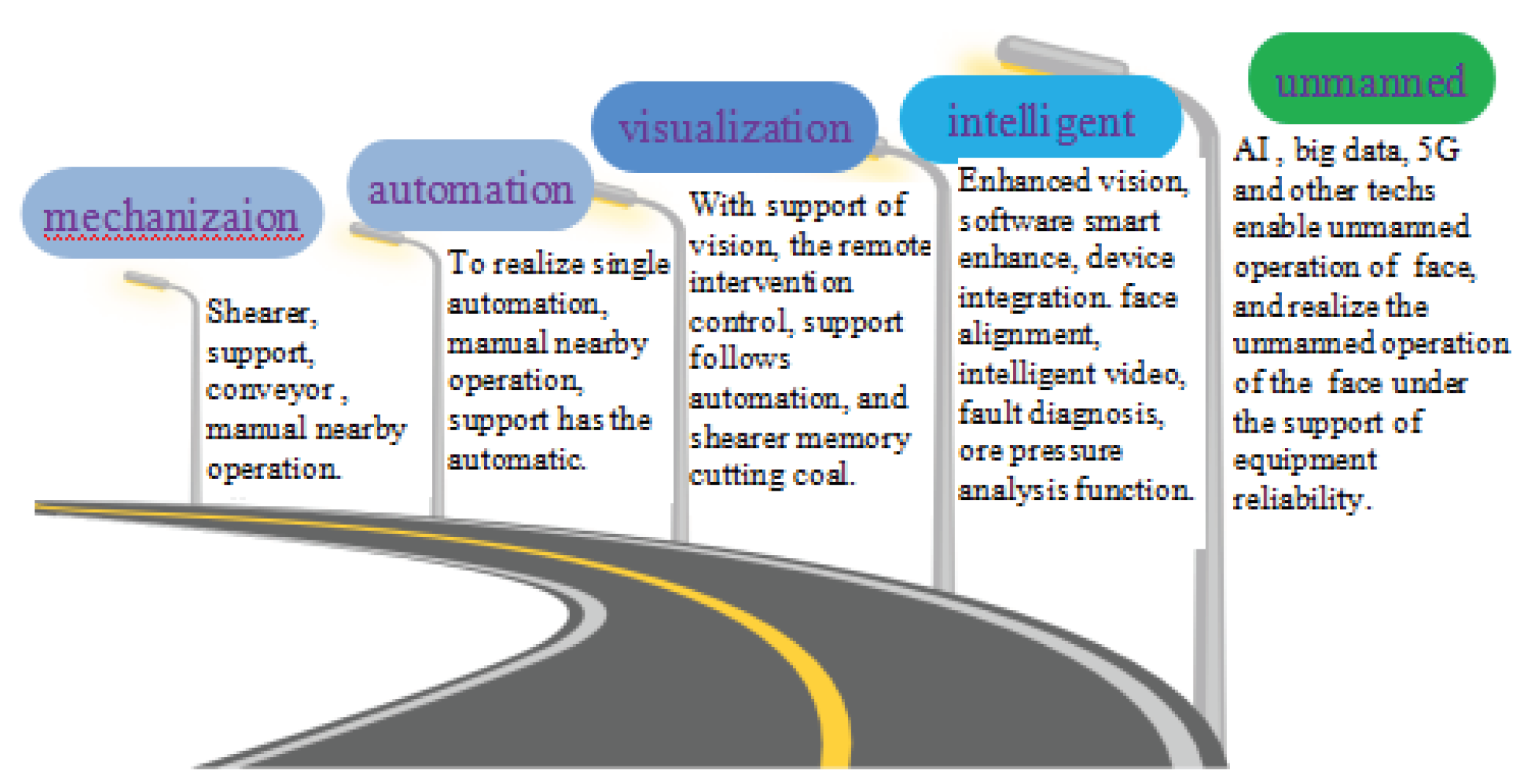
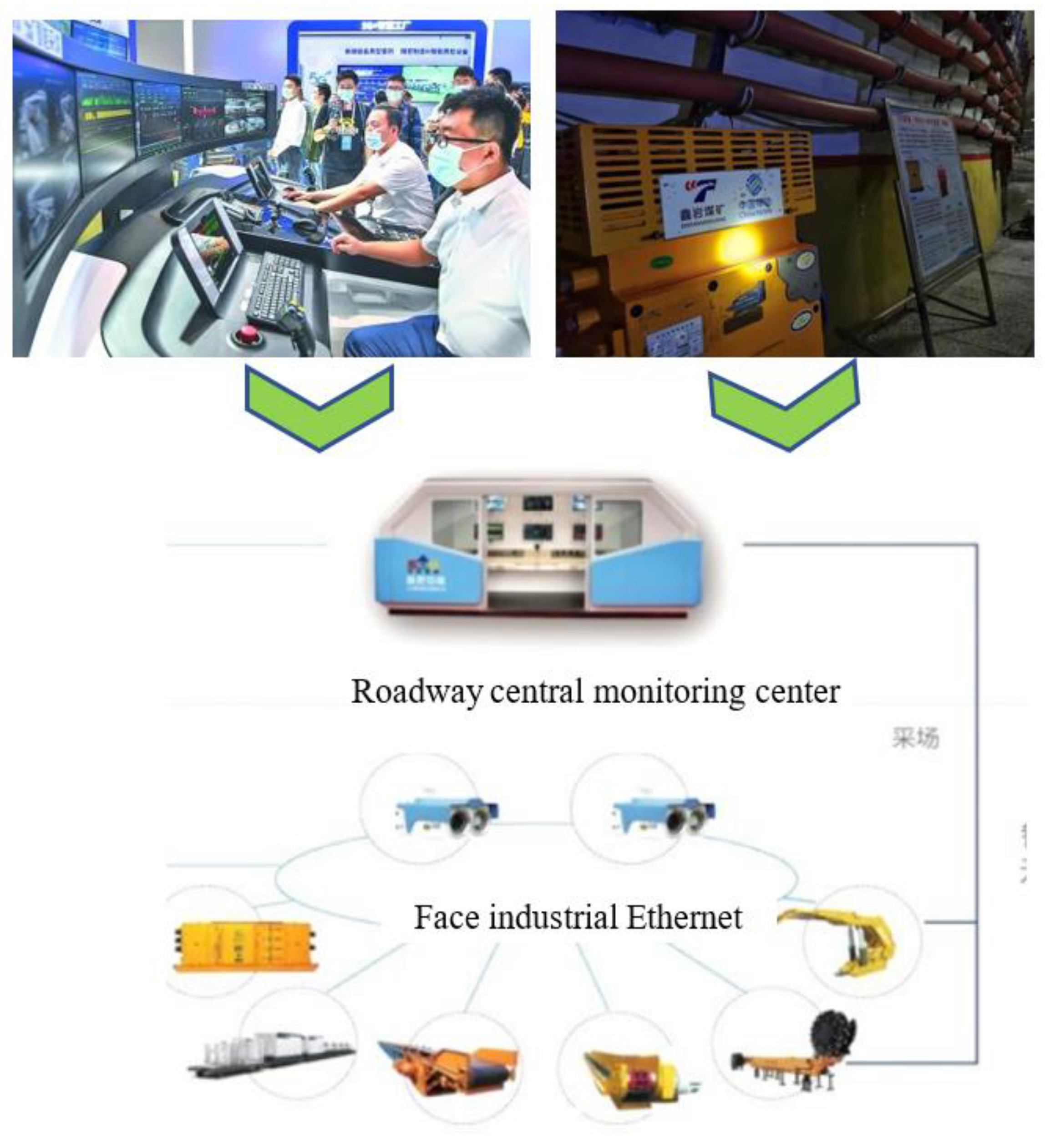
Research on coal mining robots in China has centered around the China University of Mining and Technology and the China Coal Science and Engineering Group. Video monitoring technology is used in fully mechanized mining of working faces to "extend" human vision to the working face, freeing operators from harsh working faces to pass monitoring centers or ground control centers. Based on real-time monitoring videos, the equipment in the fully mechanized mining working face is centrally controlled to equip the coal mining equipment in the fully mechanized mining face with robot features. The intelligent adaptive mining mode is based on visual remote intervention technology and further enhances the intelligence of mining control systems through transparent mining by enhancing the capabilities of mining environment perception, intelligent decision-making, and adaptive equipment control.
Figure 2.
Development path of an intelligent mine.
The following are representative research findings from some institutions:
(1) China University of Mining and Technology. A group of roboticized coal mining machines was developed, among which the roboticized shearer achieves speed control of the coal mining drum, traction speed control, and adaptive height control. Robotized support can achieve support force regulation, posture regulation, bracket group arrangement regulation, etc. Robotized transportation can achieve speed control of the scraper conveyor, tension control of the scraper chain, and straightness control. Robotized transportation integrates intelligent transfer machines, intelligent crushers, and intelligent belt conveyors for control.
(2) Shandong University coal mining robot. A coal mining robot has been developed that uses wheeled walking and hydraulic drive to complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
(3) Beijing University of Science and Technology Coal Mining Robot. A coal mining robot has been developed that adopts the methods of wheeled walking and mechanical arm coal mining and can complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
(4) Henan University of Science and Technology Coal Mining Robot. A coal mining robot has been developed that uses track walking and hydraulic drive to complete the entire coal mining process. The robot also has the functions of autonomous control and navigation; it can independently plan coal mining routes based on the situation of the mine and improve coal mining efficiency.
(5) China Coal Science and Technology Group. The research and development of two subprojects of the National Key Research and Development Plan project "Research and Development of Intelligent Mining Safety Technology and Equipment in Coal Mines", namely, "Intelligent Mining Control Technology and Equipment" and "Unmanned Working Face Inspection Robot", were implemented. We conducted industrial experiments on coal mining inspection robots at Shaanxi Huangling Mining Company and undertook the development of inspection robots in Project 6 of the National Key Research and Development Plan. To achieve the production goal of intelligent working faces from "unmanned operation and manned inspection" to "unmanned operation and unmanned inspection", Tianma Company has proposed the unmanned mining technology plan of using automatic inspection robots on working faces to replace inspection personnel and proposed comprehensive mining equipment suitable for narrow and long underground mining spaces and dangerous and harsh working environments.
Figure 3.
Operation of the inspection robot in the Huangling Mining No. 1 Mine and Shendong Mining Yujialiang Mine.
Figure 3.
Operation of the inspection robot in the Huangling Mining No. 1 Mine and Shendong Mining Yujialiang Mine.
3. Construction of the shearer robot crowd
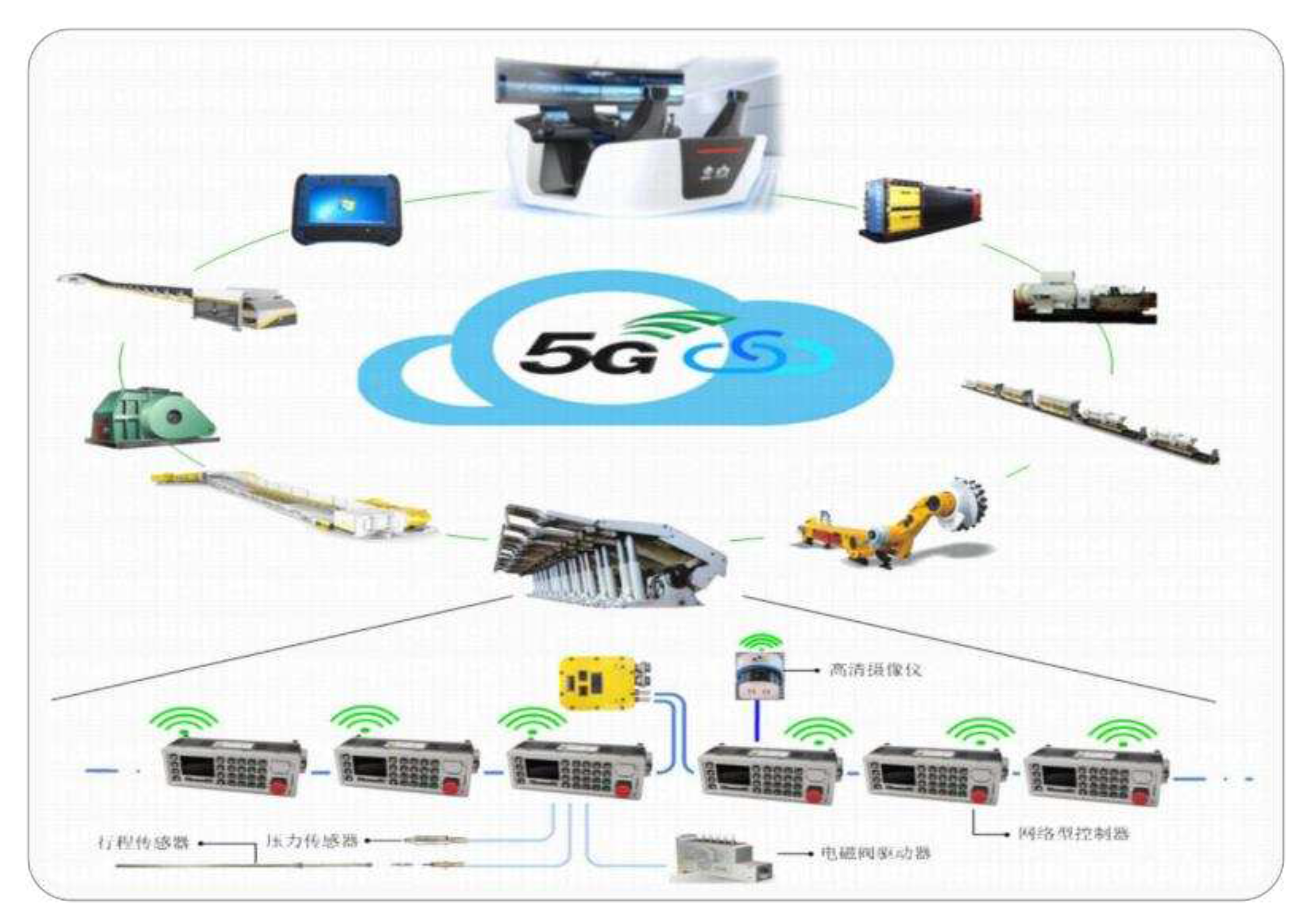
On the basis of the research on single machine equipment technology and equipment development, a group of coal mining robots is constructed that is composed of auxiliary systems such as a power supply, a liquid supply, and lighting to collaborate with a group of machines.
The cooperative control platform at one end of the working face is the central link for achieving intelligent mining of the working face. In mining work, the coal mining robot can autonomously and adaptively predict coal cutting, and the hydraulic support robot collaborates with the coal mining robot to achieve automatic machining following operation on the entire working face. The coal mining machine and the three machines have dual closed-loop cooperative control, significantly improving the level of intelligence. Dynamically optimize undercover and mining height data by analyzing historical data from multiple surgeries.
Figure 4.
Intelligent characteristics of fully mechanized mining equipment.
3.1. Mining robot
For the mining robot, to achieve the local control of the operator, the technology has been very mature, focusing on improving the reliability of the shaft encoder of the mining machine, the detection accuracy of the height of the rocker arm and the control accuracy as the breakthrough point, to carry out the research of the mining robot.
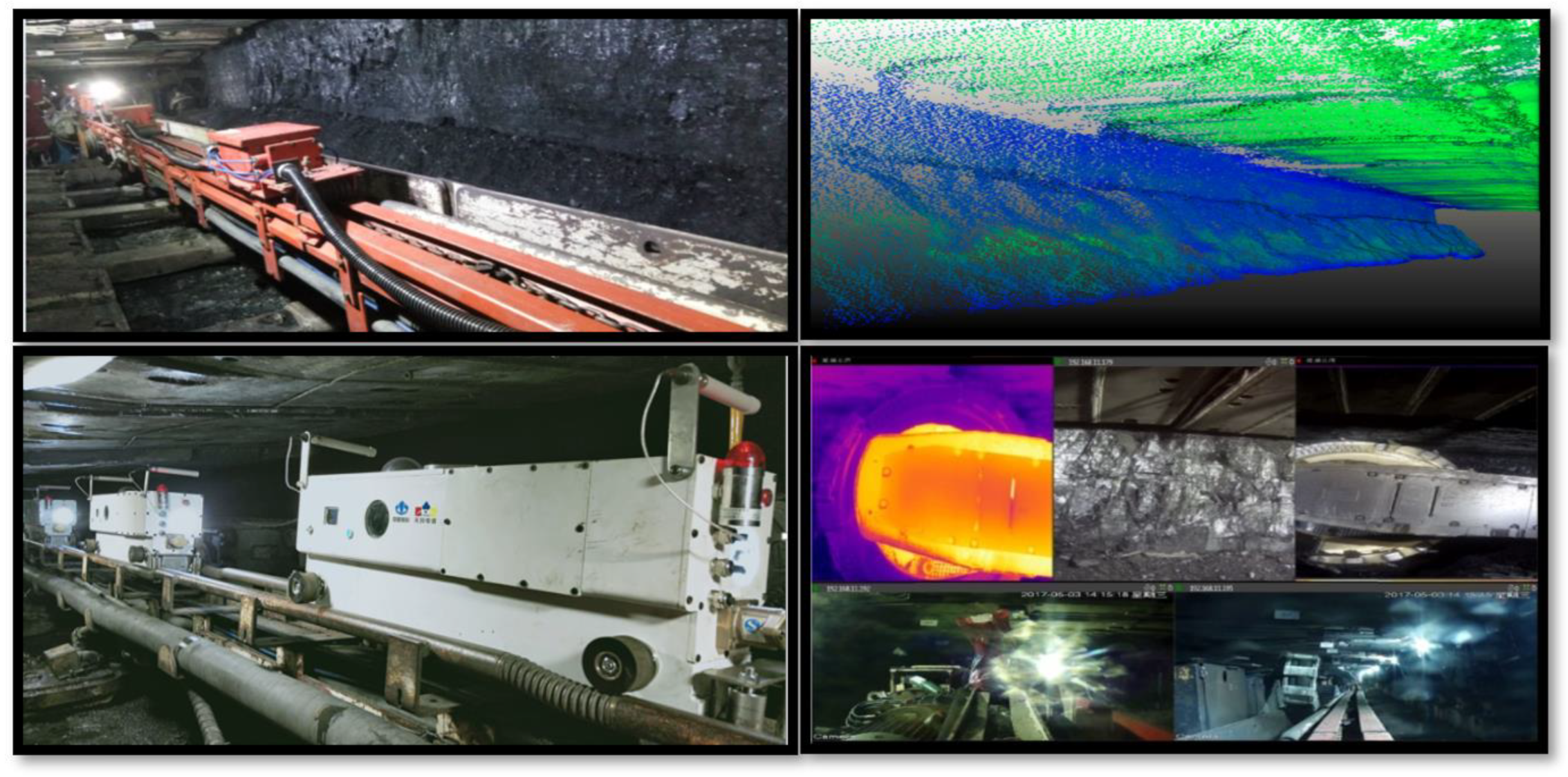
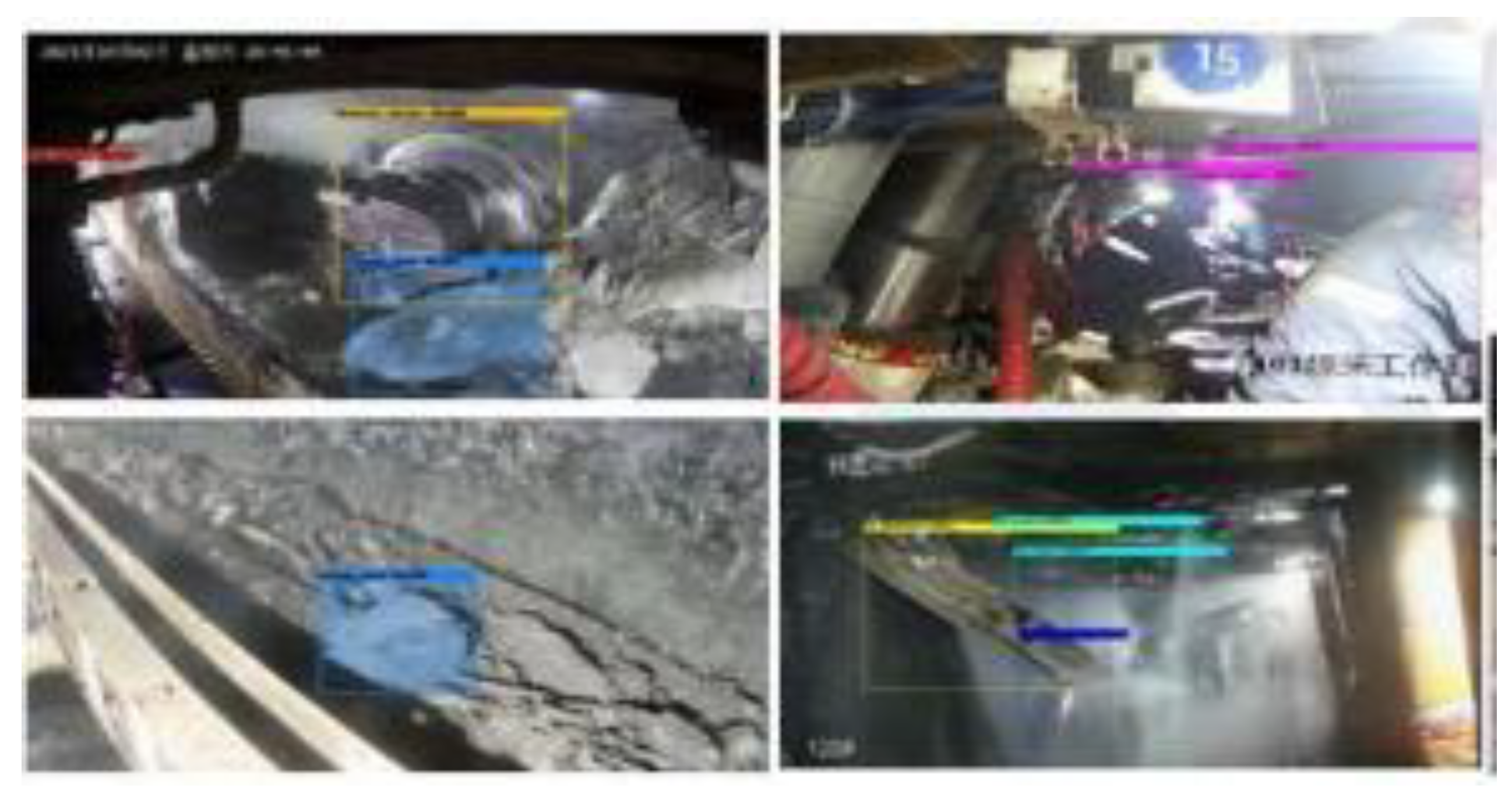
Various process methods, such as central follow-up, triangular follow-up, and cutting processes, are used for coal mining machines and hydraulic supports to achieve automated coal cutting control. Through touch operation, real-time online modification of the mining height and undulation settings is achieved, planning and cutting of the local mining height are achieved, and various undulation adjustment strategies are supported. Offline editing of coal mining processes should be supported, and multiple mining process configurations should be achieved. Support online monitoring and control of coal mining process stages and tasks. The coal cutting process of the coal mining machine transitions, and the bracket following process can be switched according to the coal mining process. Intelligent image recognition was performed for four scenarios: the position of the shearer drum, the positioning of personnel on the working face, the large amount of coal in the upstream drum of the coal flow, and the working conditions of the tail scraper conveyor. The active alarms of abnormal working conditions on the working face should be realized, and remote monitoring by personnel should be supported.
Figure 5.
Mining equipment for a coal mining machine crowd.
(1) Improve the operation and control accuracy of robots. The operation and control accuracy of robots need to be continuously improved to meet the needs of coal mining. The autonomy and intelligence of robots should be improved. The autonomy and intelligence of robots need to be continuously improved to meet operational requirements in complex environments. The operation and control accuracy of robots need to be continuously improved to meet the needs of coal mining. Specifically, this can be achieved by improving the robot’s sensors, control systems, and computing capabilities. For example, the use of high-precision inertial navigation systems, multisensor fusion technology, and high-performance computing platforms enables robots to perceive and control their motion and posture more accurately.
(2) Informate an intelligent coal mining robot cluster control system based on the integration of production, safety, and environmental protection information throughout the entire process; construct a hierarchical scheduling planning strategy and processing process knowledge graph for coal mining machine populations; achieve human‒machine collaboration, cloud edge collaboration, and robot group collaboration; and form an intelligent coal mining robot group control mode with horizontal business collaboration and vertical process integration, forming a cluster effect. Robotization refers to endowing traditional machinery with robot functions, enabling it to have semiautonomous or autonomous operation capabilities in specific environments. Traditional machinery can be replaced with robots to complete production tasks such as mining, transportation, and selection; an adaptive flexible production process can be formed through autonomous collaboration among robot groups; and the construction of a highly productive, reliable, and safe robotic mining system.
(3) The robotized mining system embodies the characteristics of "integration of networking, intelligence, and roboticization". Networking helps roboticization to "go hand in hand", and intelligence empowers roboticization to "add wings like a tiger", greatly improving the level of mining autonomy and achieving the highest goal of roboticization pursuit.
It is necessary to study the intelligent process mode suitable for robotized mining according to the new design concept of advanced intelligence and unmanned mining; build a framework for robotized mining technology from the bottom; break through the key technologies of heavy-duty robot design, manufacturing, operation and maintenance; and develop complete sets of robotized equipment such as coal mining, mining and transportation to realize normal intelligent, safe and efficient mining operations.
3.2. Support robot
For the support robot, the position of the combined force of the attitude support is calculated automatically.
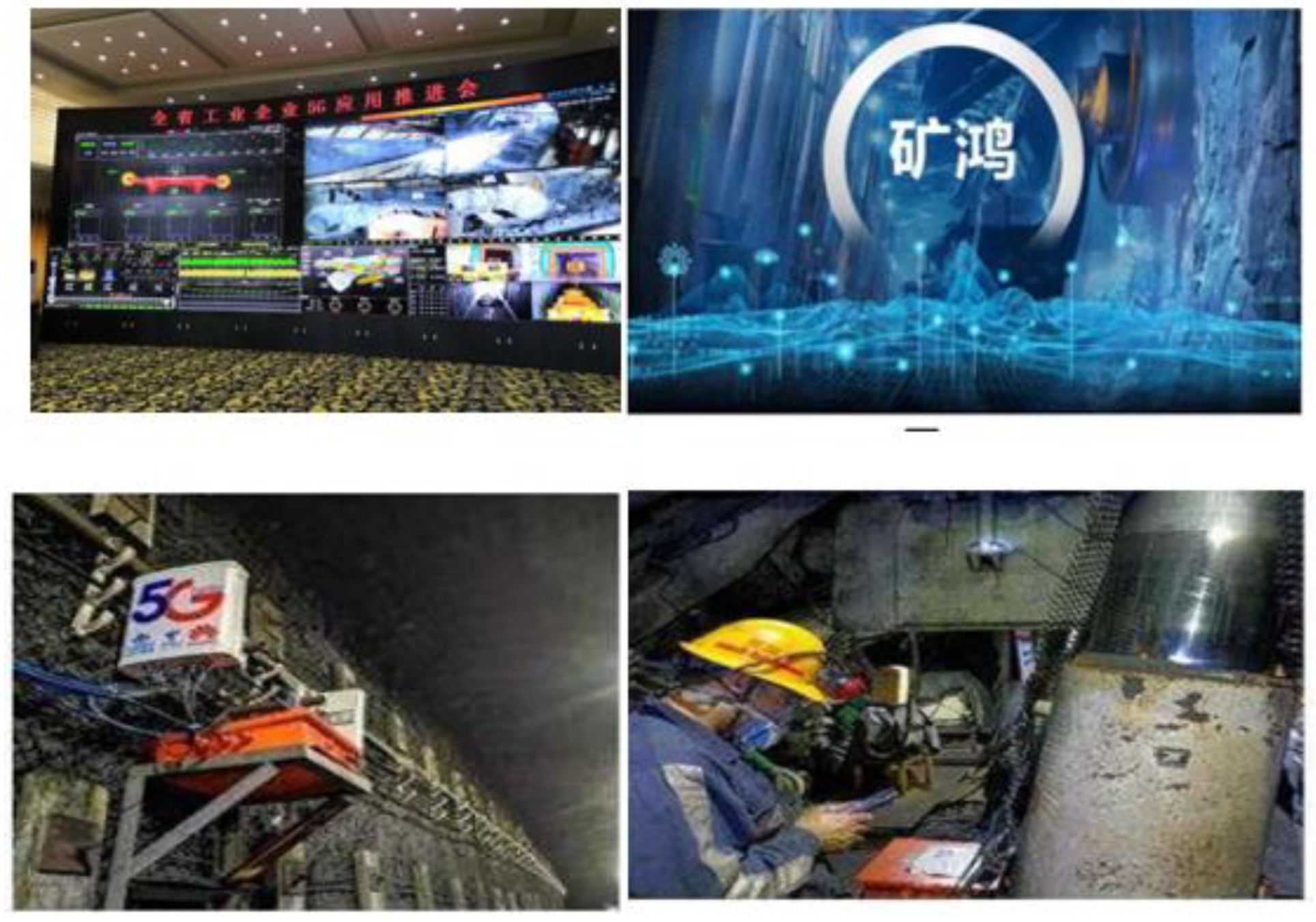
Figure 6.
Field application of intelligent video.
The core control unit of the support robot is an electrohydraulic control system, which realizes remote control and intelligent control of the support. The electrohydraulic control system is equipped with a mining height sensor on the basis of collision detection, attitude detection, mining height measurement and remote control. In addition to conventional functions, the electrohydraulic control system adopts the Ethernet transmission protocol and can be used as a data transmission platform for working surface equipment. Fault self-diagnosis includes diagnosing the fault and determining the possible cause of the fault; this approach can provide early warning of the failure of hydraulic support and reduce the occurrence of failure. It also has the ability to analyze the ore pressure of the working face.
(1) The end support of the working face is complex and changeable, and it is also an accident-prone area that has a great impact on fully mechanized mining production and needs timely detection and treatment. For working faces with large inclination angles, there is the problem of upsliding, the lack of coordinated promotion of the two lanes and the monitoring of the conveyor upsliding, and it is still necessary for operators to manually adjust according to the actual situation of the working face.
(2) The normalization operation rate of the intelligent chemical working face is not high, and manual participation in feeding, end support and other links of the coal mining working face is too high, resulting in the overall work efficiency of the intelligent chemical working face single shift not meeting expectations and network communication difficulties. There are insufficient network platform security, reliability, and bandwidth requirements; wired connections in the working face; easy occurrence of breakpoints; communication interruption of coal mining machines through carrier waves; and intelligent video endowing robots with intelligent means, which existing network platforms cannot meet.
3.3. Transportation robot
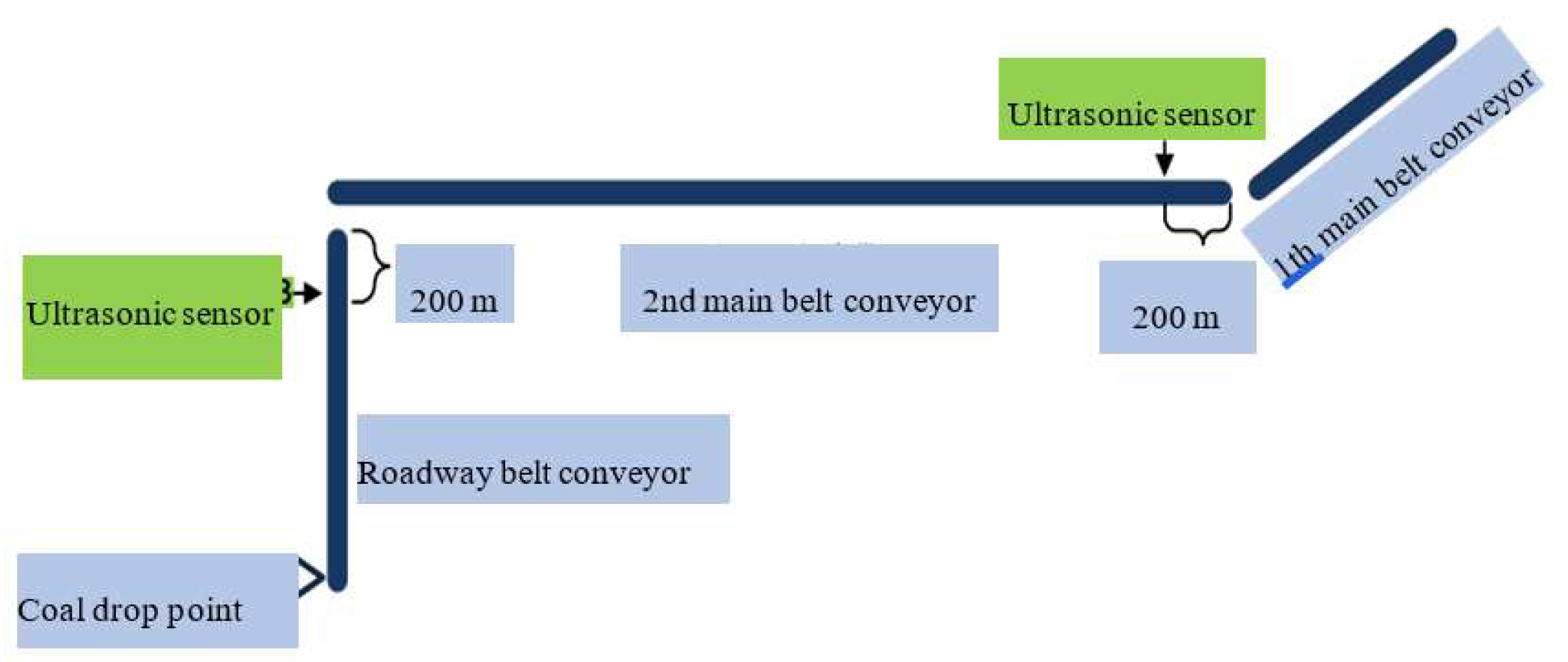
For transportation robots, the core is the scraper conveyor, which studies the status monitoring and coal flow detection of the scraper conveyor, as well as the control of the upward and downward movement of the scraper conveyor. Simultaneously, adaptive control for the start stop and intelligent speed control are needed. For example, ultrasonic sensors can be used to upload data and analyze the starting position of coal flow.
Figure 7.
Ultrasonic sensor upload data to analyze the beginning position of coal flow.
4. Coal mining robot crowd 5G technology application
China’s 5G technology is leading the world, and the application of 5G technology in domestic coal mines has also begun to increase. 5G+robot technology combines 5G communication with robots to achieve remote operation and intelligent control of robots. It has been applied to intelligent coal mining in China, including mining robots, intelligent coal mine inspection, intelligent monitoring and maintenance, intelligent power distribution, intelligent underground transportation, and other applications. These applications have improved the efficiency, safety, and collaborative capabilities of coal mining operations. The following is an overview of the application of 5G+robot technology in intelligent coal mining.
4.1. Establishing a dedicated network platform for coal mines with 5G
The 5G network is introduced into the fully mechanized mining face and integrated with the optical fiber ring network of the coal mine to realize the independent control and remote operation of fully mechanized mining equipment. These characteristics give 5G technology wide application prospects in coal mining. It carries the high-density distributed adaptive redundancy control network of a fully mechanized mining face and two alleyways and realizes the integrated control of independent learning, self-control and manual assistance of mining equipment, video cloud identification of mining and production, data cloud computing, fault cloud diagnosis and equipment cloud control.
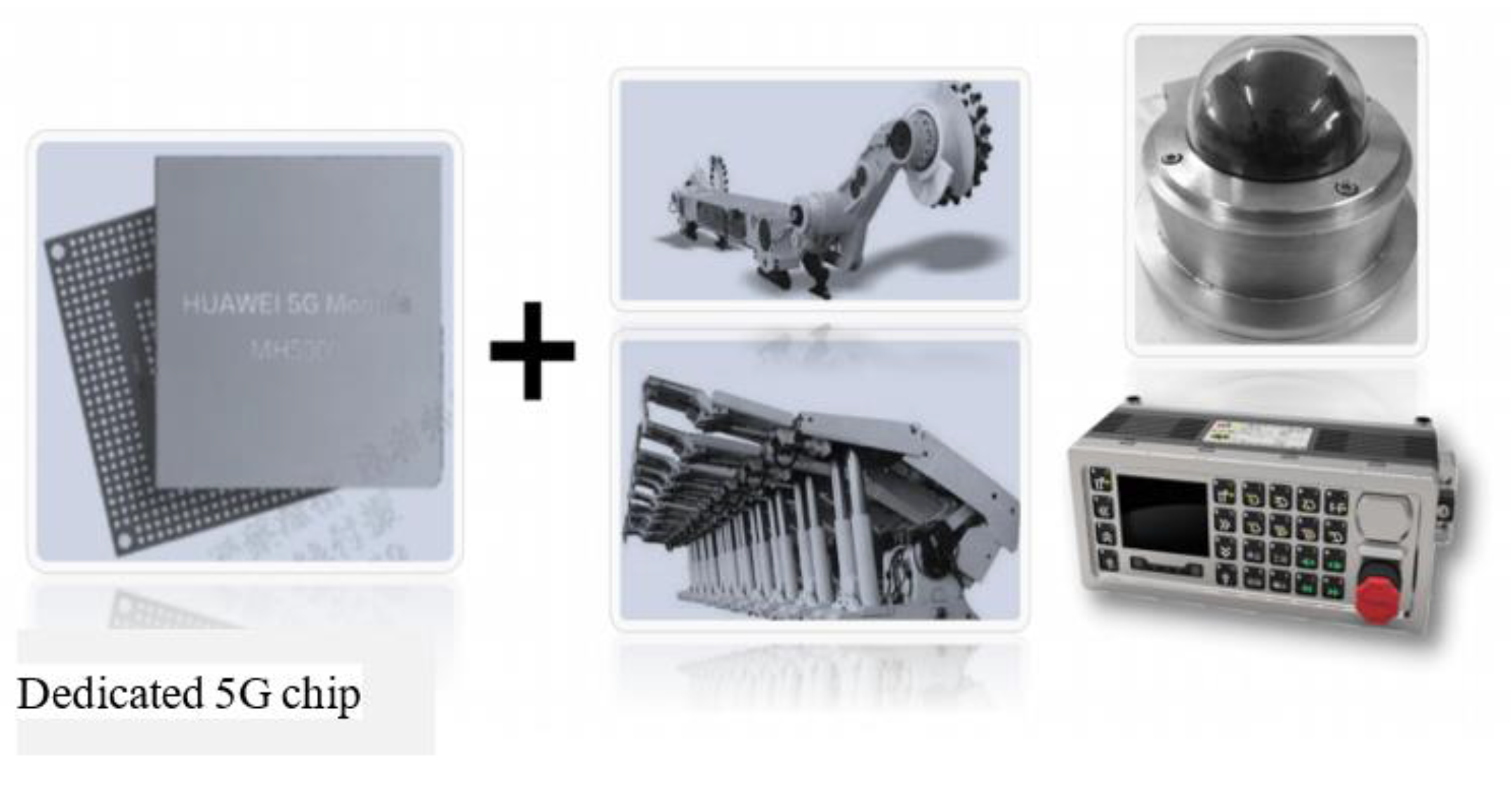
(1) We developed a batch of 5G chips, 5G base stations, 5G terminals and other equipment suitable for special functions, such as being explosion-proof in coal mines. Important domestic 5G communication equipment manufacturers, such as Huawei Technologies Corporation, have developed a batch of chips, communication equipment, and communication software for the 5G private network of coal mines.
(2) Relying on the working face gigabit+underground and underground gigabit transmission links, we constructed multiple types of data VLAN isolation and control privatization, an integrated 5G wireless communication network, and customized self-organized topology optimization technology under non‒line-of-sight and multipath conditions. We support wide-area and large-capacity mobile terminal access, forming a coal mine underground Internet of Things network.
Figure 8.
Explosionproof 5G chip and equipment in a coal mine.

4.2. Integrated mining intelligent control system connected to a 5G private network
The comprehensive mining electric control system is connected to the 5G coal mine dedicated network. The electronic control system is integrated and applied through a CPE and 5G network to achieve ground remote control, with a remote-control delay of ≤20 ms. Real-time and accurate control can be achieved at anytime and anywhere underground. Flexible and efficient configuration monitoring should be implemented. The remote-control delay of the device is less than 100 ms, and the concurrent upload delay of 22 channels of videos is less than 300 ms.
Figure 9.
The Internet of Things with 5G in Coal Mines.
The electrohydraulic control communication system of the working face support is connected to 5G, and the electrohydraulic control system is integrated and applied through the CPE and 5G networks to achieve ground remote control. The remote-control delay is less than 20 ms, and the method is real-time and accurate. To determine the spatial position and posture of hydraulic supports under high inclination conditions, combined with automatic lifting technology, the autonomous lifting strategy of a high inclination working face is explored. The efficiency of the working face in terms of liquid supply and lifting is studied, and an efficient lifting strategy for the working face is explored. The real-time pressure data collected by the support robot on the working face are uploaded, and technologies such as edge services and cloud computing are utilized to analyze the pressure manifestation of the working face under roof fragmentation conditions. An independent lifting strategy is developed. Real-time perception of the support posture is achieved through inclination and height sensors, and video recognition and other technologies are integrated to develop collision prevention strategies between the support robot and the coal mining machine.
Figure 10.
Electric control connection diagram of 5G private network access in coal mines.
5G at workface 31004 in the Yangmei Mining Group Xinyuan Coal Mine (in Shanxi Province, China). A 5G control cloud with a network controller as the core was constructed, an electronic control system was incorporated into the industrial Internet system for the first time to achieve "one network to the end", and an electronic control system was integrated with the 5G network for the first time.
Figure 11.
Application of 5G at workface 31004 in the Xinyuan COAL Mine.
5. Control strategy of the mining robot
On the basis of technological breakthroughs in individual robots and successful research and development of individual robot equipment and systems, a reliability testing platform for coal mining robots and a remote intelligent operation and maintenance platform for robots have been proposed. Through reliability testing during the research and development process and online evaluation of the health status of application links, optimization design and iterative upgrading of various types of coal mining robots are achieved. At the same time, several intelligent coal mine system integration service enterprises have also developed a universal operating system for coal mine robots and a comprehensive control platform for all coal mine robots, thereby promoting the standardization, modularization, and industrial research and application of coal mine robots.
5.1. Application of inspection robots in intelligent mining control decision-making
After nearly a decade of research and exploration, the current visual remote intervention mining mode has been the main mode of intelligent unmanned coal mining guided by various industry technologies, such as "unmanned operation, manned inspection", "visual immersion technology", and "transparent working face". Video monitoring technology is adopted for fully mechanized mining faces to extend human sight to the working face, freeing operators from harsh working faces to the monitoring center or ground sub controlling center. Based on real-time monitoring videos, the equipment of the fully mechanized mining face is centrally controlled, allowing the coal mining equipment of the fully mechanized mining face to possess robot characteristics. The intelligent adaptive mining mode is based on visual remote intervention technology and further enhances the development ideas of transparent mining by enhancing the capabilities of mining environment perception, intelligent decision-making, and equipment adaptive control.
Figure 12.
Fully mechanized mining inspection robot.

The application scenarios mainly include the following aspects:
Coal mining robots can achieve greater flexibility and efficiency in remote operation and control, real-time monitoring and autonomous control, and achieve autonomous control in coal mining operations, including autonomous navigation, autonomous obstacle avoidance, and autonomous operation. Real-time monitoring and control have been achieved: robots need to monitor and control environmental parameters, such as temperature, humidity, and gas concentration, in real time during coal mining operations.
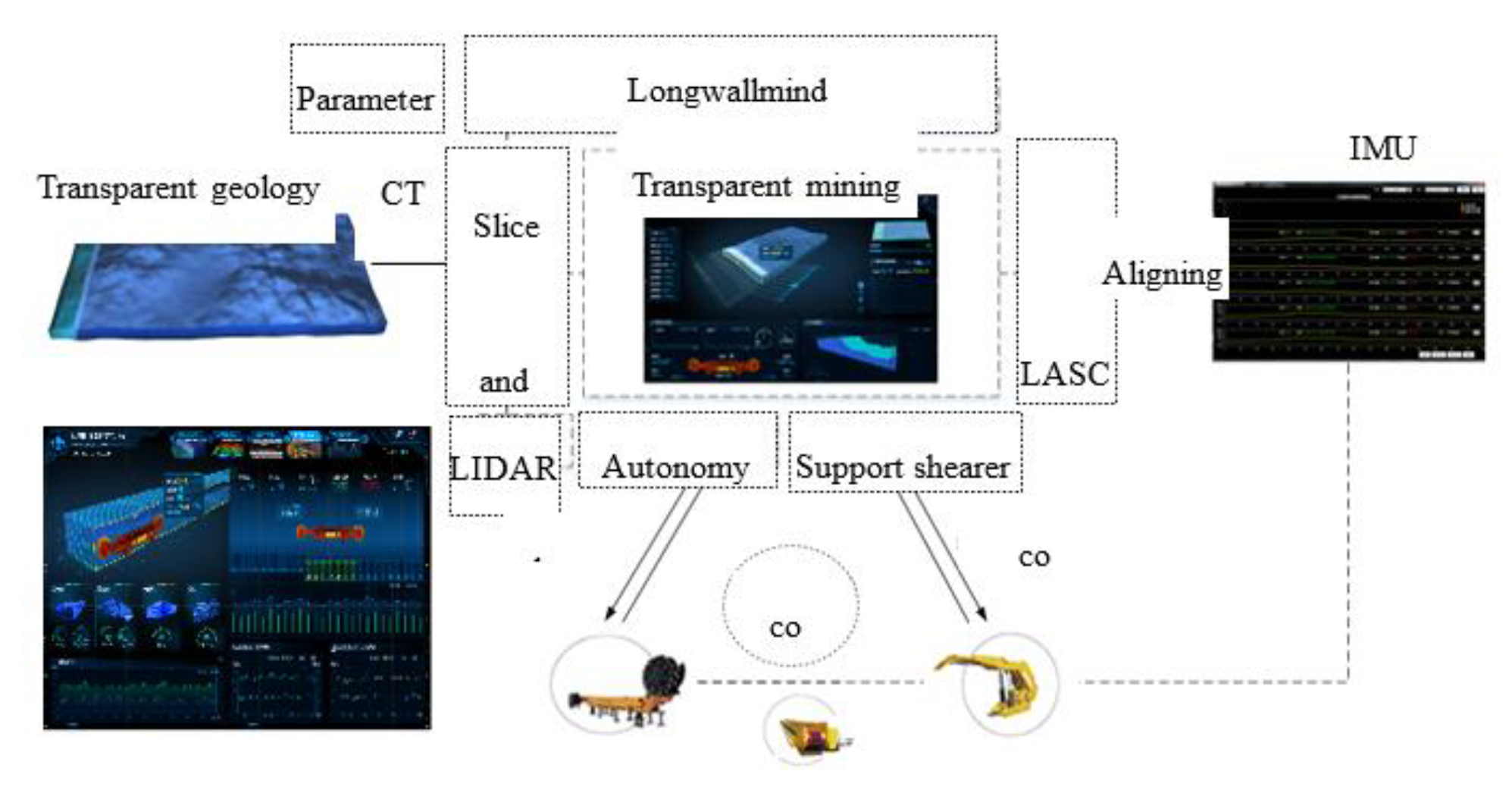
Figure 13.
Transparent geological model for a workface.
(2) Intelligent inspection: Realize the automation of robot inspection, including automatic inspection, intelligent obstacle avoidance, and fault warning, providing high-speed and stable communication support and allowing the robot to provide real-time feedback data from various equipment and sensors inside the coal mine to the control center for analysis and processing.
(3) Remote control and command: A network using 5G technology has a fast transmission speed and low latency, enabling remote control and control of robots, making coal mining more intelligent and automated, realizing more precise and fast remote commands, and communicating directly with on-site personnel through 5G technology to improve emergency response capabilities in emergency situations.
(4) Real-time monitoring and feedback: Autonomous path planning: Robots can cooperate with 5G networks to establish digital maps, achieve autonomous path planning and navigation, and improve transportation efficiency and accuracy.
(5) Data sharing: 5G technology can achieve data sharing among multiple robots, allowing different robots to collaborate and jointly complete coal mining tasks. The low latency communication capability and high reliability of 5G networks enable robots to perceive and control their movements and postures more accurately, improving job accuracy and safety.
(6) Internet of Things application: In fully mechanized mining faces, various devices can be connected through 5G technology to form the Internet of Things. In this way, centralized management and monitoring of the entire fully mechanized mining face can be achieved.
(7) Virtual reality technology: VR technology can provide miners with more realistic training and operating experience. The use of 5G technology can ensure the smoothness and stability of virtual reality images and improve training and operational effectiveness.
(8) Operation robots: Robots for special scenarios such as roof fall handling, advanced support, and safety detection are important auxiliary means for achieving intelligent mining.
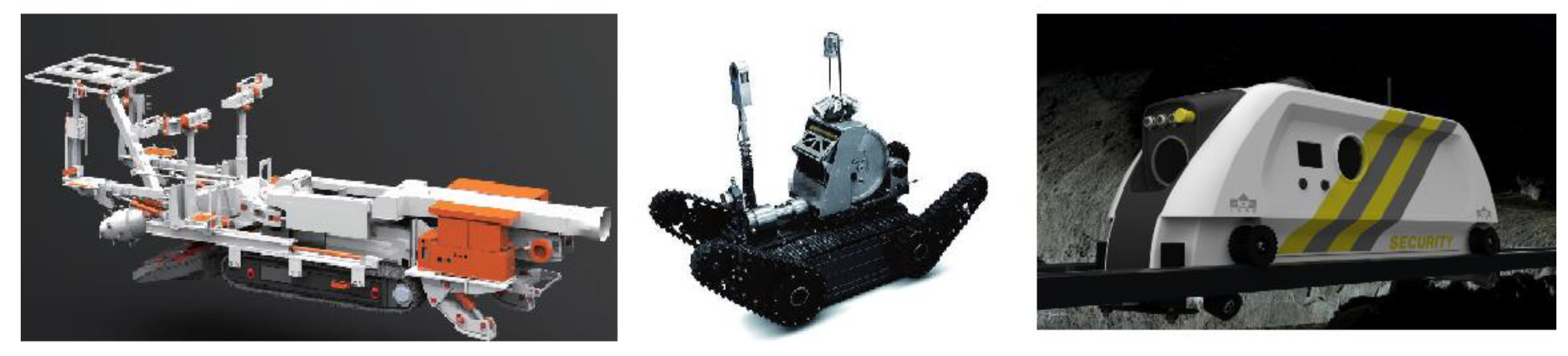
Figure 14.
Future operation robots for coal mines.
5.2. Practice case
Moreover, the advanced automation system (ASA) and IMSC system developed by JOY in the U.S. have achieved the planning and cutting of coal cutters, significantly improving their work efficiency and programmable operational capabilities. The core of the support machine is still the electrohydraulic control system, while the transportation robot is controlled through real-time monitoring and coal flow balance.
Research on mining working faces in the CHN ENERGY Investment Group Shendong Mining Yujialiang Coal Mine, Shaanxi Coal Chemical Group Huangling Mining No.1 With respect to the coal mine, Tiandi Corporation Wangpo Coal Mine, and other coal mines, we have gained a deep understanding of the coal mining equipment and application situation of the working faces. Research has shown that encoders and rocker arm height sensors (swing angle sensors) are bottlenecks that restrict the intelligent application of shearers. Most domestic shearer manufacturers use angle sensors for rocker arm height measurements, with large errors of up to 5 cm; these sensors cannot support advanced functions such as remote control and coal cutting planning. Due to the installation of the shaft encoder outside the traveling box of the coal mining machine, the shaft encoder is easily damaged, which limits the application of coal mining machine positioning and inertial navigation. The collaboration and straightness control of support robots are key factors that constrain intelligence.
The following are successful cases of intelligent mining engineering practice in China:
(1) The Hongfa Mine in Yunnan. Intelligent mining at a height of 2.8 m has achieved an automation rate of 76% under complex geological conditions, with an average reduction of 30% (5 people) in the number of workers on the working face. By adopting automatic machines following operation, production efficiency has increased by more than 2%, achieving automatic, safe and efficient production with fewer or even unmanned machines following operations and fewer people on duty, effectively promoting the construction of intelligent mines.
(2) Face 11203 of the Ruifeng Mine. After debugging and putting into use in March 2020, the overall system was stable, with a low failure rate and normalized operation. Manual operation is not allowed in areas where conditions permit.
(3) Face 2209 (medium thick coal seam) of the Zikuang Yangjiacun Coal Mine in Zikuang. The average mining height is 2.3 m, and the working face length is 300 m. Automated cutting of triangular coal was realized, with an automation utilization rate of 70%. Usage effect: By using one centralized controller on the ground, the entire production system of the working face can be remotely controlled, reducing the number of people by more than 60% compared to the traditional fully mechanized working face of 12 in the past.
(4) Dongtan Mine 63-06 working face (large mining height). The mining height is 5.7 m, and the inclined length of the working face is 265 m, achieving the normalized application of intelligent support following operation. Usage effect: Each shift requires only 8 operators, including 1 scaffolding worker, 1 three-machine driver, 2 end workers, and 1 shift leader, reducing 8 people by 50%. Benchmarking project: The implementation of large-scale mining and normalized operation in the central and eastern regions has played a good demonstration role.
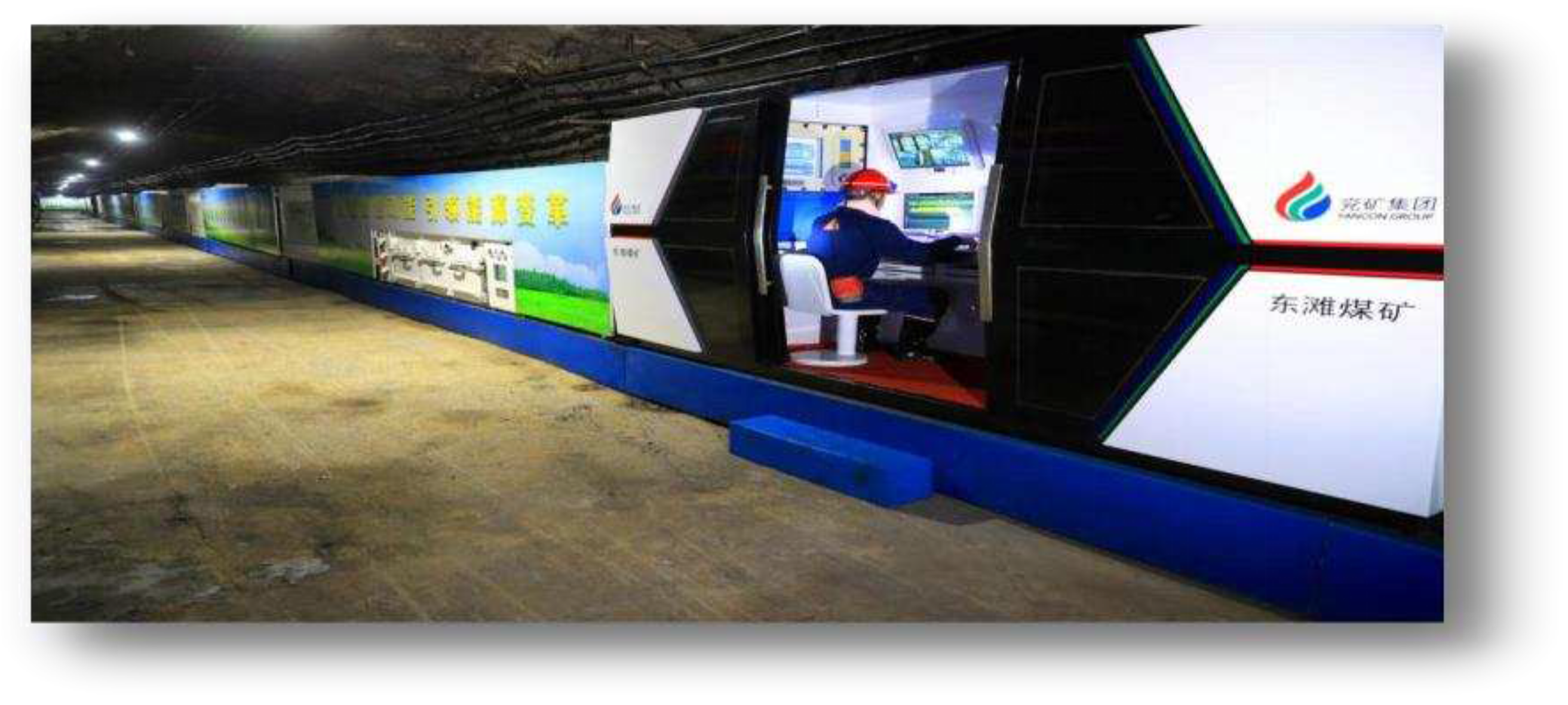
Figure 15.
Real scene of an intelligent working face in the Dongtan Coal Mine of Shandong Energy.
(5) Working face 4104 of the Yitai Baoshan Mine (thin coal seam). The mining height is 1.2-1.4 m, the minimum mining height is 1.25 m, and the inclined length of the working face is 240 m. Implementation situation: The intelligent operation of the working face equipment is normal, with a support and machine usage rate of up to 96.9%, an average daily coal cutting of 12 knives, and a daily production of 4500 tons. Application effect: The number of operators on the working face was reduced from 10-12 to 5-6, a reduction of more than 60%.
(6) Wangjialing Mine 12309 face (top coal caving). It was officially produced on August 23, 2019, and successfully implemented the application of four automatic coal caving technologies. The concept of "prerelease detection, identification during release, and postrelease monitoring" was developed. Application effect: Since the operation of the working face was normalized, the number of personnel in the first team of the Wangjialing Mine has been reduced from 100 to 75, a decrease of 24.8%. The project successfully passed the acceptance of the intelligent mining technology research project for top coal caving on July 9, 2020.
Figure 16.
Real view of the intelligent working face.
(7) Working face 8202 of the Tongxin Mine (top coal caving). The strike length is 2184.5 m, the inclined length is 200 m, the mining height is 3.9 m, the mining and drainage ratio is 1:2.91, and the coal seam dip angle is 1-2°. The normalization of the full face machine was achieved following automation and one click start stop, personnel were reduced, efficiency was increased, and production efficiency was increased by 10%.
(8) The 220704 working face of the Ningmei Zaoquan Coal Mine (with complex geological conditions). Basic situation: The length of the working face is 284.6 m, and the average mining height is 3.85 m. The problem of controlling the upward and downward movements of inclined working face equipment was solved, and an upward bottom sweeping knife and a downward top cutting knife were used for high-definition video. Application effect: A maximum of 13 coal cuts were achieved per day, and only one monitoring operator was placed on the working face.
(9) Dabaoding Coal Mine (large-angle complex coal seam). The average inclination angle is 26°, which is the first intelligent project in the southwest region with a large inclination angle. The authors achieved linkage between the anti-overturning oil cylinder of the support and the anti-slip oil cylinder of the scraper machine, thus achieving normalization of the following machine. Usage effect: The comprehensive mining team has a single shift of production workers, with only 3 people following the machine for inspection. On April 8, 2021, the "Intelligent System Project for Large Dip Complex Working Faces" of the Sichuan Coal Group successfully passed the acceptance meeting at the Dabaoding Mine project of the Panzhihua Coal Company.
6. Conclusions
On the basis of fully studying the development of existing intelligent mining automation and information technology in coal mines, a technical system framework centered on coal mining machine groups has been proposed, including single coal mining robots, robotic equipment, robot clusters, and unmanned systems. The common key technical support for the research and development of coal mining machine personnel has been elucidated, and crossintegration with new technologies such as 5G, the industrial internet, big data, artificial intelligence, and digital twins has been proposed. By utilizing robot technology to enhance the adaptability of complex and safe production environments in fully mechanized mining, we can further enhance the level of autonomous and intelligent application of fully mechanized safe mining production. Research should be carried out on coal mining robots, support robots, and transportation robots to achieve intelligence in fully mechanized mining faces, thereby providing equipment support for fewer and unmanned fully mechanized mining faces.
References
- Ge Shirong, Zhang Fan, Wang Shibo, et al. Research on technical architecture of digital twin intelligent coal mining face. Journal of China Coal Society 2020, 45, 1925–1936.
- WANG Guofa, FAN Jingdao, XU Yajun, et al. Innovation progress and prospect on key technologies of intelligent coal mining. Industry and Mine Automation 2018, 44, 5–12.
- WANG Guofa. New technological progress of coal mine intelligence and its problems. Coal Science and Technology 2022, 50, 1–27.
- Wang Guofa, Du Yibo, PangYihui. Technical characteristics and requirements of 6S intelligent coal mine. Intelligent Mine 2022, 3, 2–13.
- WANG Guofa, ZHAO Guorui, HU Yahui. Application prospect of 5G technology in coal mine intelligence. Journal of China Coal Society 2020, 45, 16–23.
- Huang Zenghua, WANG Feng, ZHANG Shouxiang. Research on intelligent coal mining system architecture and key technologies. Journal of China Coal Society 2020, 45, 1959–1972.
- WANG Guofa. M anagement measures for the acceptance of intelligent demonstration coal mines (trial) -- Interpretation from the perspective of the compilation team. Journal of Intelligent Mine 2022, 3, 2–10.
- WANG Guofa. Accelerate the intelligent construction of coal mines and promote the high-quality development of the coal industry. China Coal 2021, 47, 2–10.
- Ren Huaiwei, Wang Guofa, Zhao Guo-Rui, et al. Information logic model and mining system decision control method of smart coal mine. Journal of China Coal Society 2019, 44, 2923–2935.
- Wang Guofa, Zhang Tiegang, Wang Chengshan, et al. Research on development strategy of energy and mining industry governance system based on new generation information technology. Engineering Science 2022, 24, 176–189.
- Li Shuai Shuai, Ren Huaiwei. Research progress and prospect ofposition and attitude measurement technology for three machines of Fully mechanized mining face. Coal Science and Technology 2020, 1–11.
- Fan Jingdao, Xu Jianjun, Zhang Yuliang. Intelligent unmanned fully mechanized mining technology under different geological conditions of coal seam. Coal Science and Technology 2019, 47, 43–52.
- Wang Guofa, Du Yibo. Framework and construction ideas of intelligent standard system for coal mine. Coal Science and Technology 2020, 48, 1–9.
- Li Sen, Wang Feng, Liu Shuai, et al. Research on key technology of inspection robot for Fully mechanized mining face. Coal Science and Technology 2020, 48, 218–225.
- Wang Guofa, Liu Feng, M eng Xiangjun, et al. Research and Practice of coal mine Intellectualization (primary stage). Coal Science and Technology 2019, 47, 1–36.
- Hao Yong, YUAN Zhi. Design of automatic inspection robot system for Fully mechanized mining face. Coal Science and Technology 2020, 1–7.
- Meng Qingyong. Discussion on the Application Architecture of 5G technology in coal mine. Industrial and Mine Automation 2020, 46, 28–33.
- MENG Qingyong. Probe on 5G architecture applied in coal mine underground. Industry and Mine Automation 2020, 46, 28–33.
- WEI Kaikai. Optimization Design of the Robot Arm for Inspection Robot in Unmanned Mining Face. Modern Mining 2019, 35, 206–208 + 214.
- Niu Jianfeng. Research on unmanned key technology of Fully mechanized mining face based on video inspection. Coal Science and Technology 2019, 47, 141–146.
- Ge Shirong, Hu Yue, Pei Wenliang. Robot system and key technologies in coal mine. Journal of China Coal Society 2020, 45, 455–463.
- Yang Xuejun, Wang Ranfeng, Wang Huaifa, Li Weiguo. Pose Detection of Hydraulic support inspection Robot based on Motion Process Reduction Method. Journal of Taiyuan University ofTechnology 2020, 51, 162–170.
- Hu Qingsong, ZHANG Henan, LI Shiyin, SUN Yanjing. Smart coal mine target Location Service Technology based on Big Data and AI. Coal Science and Technology 2020, 8, 1–10.
- Zhang Xuhui, Zhou Ying, Yang Wenjuan. Application of pose detection technology in mine face inspection robot. Sensor and Microsystems 2020, 39, 152–155 + 160.
- Zhang Shusheng, M a Jingya, Cen Qiang. Research oninspection robot system of Fully mechanized mining face in Coal mine. Coal Science and Technology 2019, 47, 136–140.
- Zhang Shouxiang, Liu Shuai. Experimental research on penetrating detection of coal and rock by pulse radar. Journal of China Coal Society 2019, 44, 340–348.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



