Submitted:
25 January 2024
Posted:
26 January 2024
You are already at the latest version
Abstract
This work targets the development of a mobility control system for high-speed series hybrid electric tracked vehicles, which operate with independent traction motors for each track. The scope of the research encompasses the modeling of the series hybrid powertrain specific to military tracked vehicles, as well as an in-depth analysis of their dynamic behavior. Subsequently, the study conducts a critical review of the mobility control approaches sourced from literature, identifying key techniques relevant to high-inertia vehicular applications. Building on the foundational models, the study puts forward a robust closed-loop mobility control system aimed at ensuring precise and stable off-road vehicle operations. The system's resilience and adaptability to a variety of driving conditions are emphasized, with a particular focus on handling maneuvers such as steering and pivoting, which are challenging operations for tracked vehicle agility. The performance of the proposed mobility control system is tested through a series of simulations, covering a spectrum of operational scenarios. These tests are carried out in both offline simulation settings, which permit meticulous fine-tuning of system parameters, and real-time environments that replicate actual field conditions. The simulation results demonstrate the system's capacity to improve vehicular response and highlight its potential impact on the future designs of mobility control systems for the heavy-duty vehicle sector, particularly in defense applications.
Keywords:
Hybrid Electric Tracked Vehicles
; Hybrid Electric Military Vehicles
; Vehicle Control
; Mobility Control System
; Series Hybrid Electric Powerpack
; Tracked Vehicle Dynamics
; Steering Maneuver
; Torque Management
; Robust Control
; Terrain Adaptability
1. Introduction
Tracked vehicles are essential for various sectors, including automotive, defense, construction, and agriculture, due to their superior off-road capabilities. The recent shift towards hybrid electric drive systems, similar to those in wheeled vehicles, has gained momentum thanks to the advantages they offer. Sivakumar's study states that the hybridization of military vehicles offers significant benefits, including improved fuel efficiency, enhanced drivability, and silent running, yet faces considerable development challenges due to the demand for robust and environment-resistant components [1]. Many studies agree that adding electric power to military vehicles could make them quieter and work better, while also providing extra electric power when needed as summarized in the research that introduces a new hybrid power system for these vehicles that aims to cut down on weight and use less fuel without compromising on how well the vehicle performs [2]. Furthermore, the adaptation of series hybrid drives to tracked vehicles implies a need for distinct controller requirements: a power management algorithm for effective power distribution among the power sources (battery and generator set) and a mobility control algorithm for independent motor operation to achieve desired motion control variables, including sprocket velocity and track speed differential during maneuvers. It is also crucial to operate these systems within a region ensuring robustness and optimal performance.
FNSS, a global leader in the land systems sector, is at the forefront of this innovation, not only producing wheeled and tracked armored combat vehicles, turrets, and engineering vehicles but also exploring hybrid powertrain technologies [3]. The focus of this study revolves around the hybridization of an FNSS armored tracked vehicle named KAPLAN HYBRID, as shown in Figure 1. This work is presented at EVS36 symposium in Sacramento, USA, in June 2023 by Çeliksöz together with the publication of conference paper in which control system development of the vehicle is focused on [4]. This paper builds upon the conference paper, providing an extension that details the development of a mobility control system specifically tailored for FNSS's series hybrid tracked vehicles. The approach commences with the modeling of vehicle dynamics and hybrid powertrain using MATLAB Simulink, followed by a review of existing mobility control strategies detailed in the literature. Subsequently, in the simulated environment, a robust closed-loop mobility control system is designed and tested, while the power management system is analyzed as a black box model that sets instantaneous traction power limits to ensure clarity and maintain focus on mobility controller development. The system's robustness is validated by simulating the vehicle model against diverse dynamic traction power constraints in various scenarios.
Before delving into the details of this work, it is essential to note that current literature documents a range of control methodologies for hybrid systems. On the side of the dual independent motor-driven tracked electric vehicles, Zhang et al. studied an improved steering control utilizing a model predictive control approach, leading to efficient adherence to specified speed and turn rates [5]. The research demonstrates the potential to enhance vehicle stability under varied driving conditions through the intelligent application of predictive control algorithms. Zeyu et al. implemented a Neural Network combined with a PID algorithm to refine the vehicle's steering control [6]. Even though the traction motor torques are initially defined by the neural network, the introduction of PID adjustments accommodates variable terrain coefficients. Hu et al. discussed a dual-motor drive strategy that inherently computes torques for a predetermined target turning radius, employing a PID controller to achieve the radius more rapidly [7]. Additionally, Pei et al. proposed a torque fuzzy compensation control strategy to enhance steering execution, where torque distribution is regulated by applying direct multipliers derived from fuzzy logic [8], and the corresponding diagram is illustrated in Figure 2.
In their review of electric tracked vehicle mobility, Kotiev et al. address the complexities of achieving balanced torque in high-speed scenarios, particularly through individual drives on each sprocket [9]. The traditional methodologies are determined insufficient for accurate analysis, causing the authors to incorporate neural networks and simulation tools to better predict the thrust requirements for various steering conditions. Their work emphasizes sophisticated design and testing protocols in the realm of advanced electric vehicle systems.
Alongside the independent dual motor drive studies, people from tracked EV community also suggests power coupling drive solutions, in which mobility is improved using a transmission between left and right traction units. Zhai et al. introduced a steering stability control methodology that significantly enhances the handling stability and safety for high-speed tracked vehicles equipped with a four-motor distributed drive system [10]. This method utilizes a steering coupling system and a direct yaw torque control strategy to optimize torque distribution, ensuring improved steering performance under various conditions. In their subsequent work, Zhai and co-authors address a pivotal aspect of electric tracked vehicle design, focusing on the handling behavior during dynamic steering of a dual motor drive system [11]. The research articulates the requirements for torque and power of the dual motors for effective maneuverability, leading to the conceptualization of a new steering system. Investigation by Huang et al. into the dynamics of dual-motor drive tracked vehicles during high-speed steering proposes a novel electromechanical coupling device coupled with an optimized torque distribution control approach, resulting in a significant improvement in the power output and steering performance [12]. Zhai and his team, furthermore, have devised a power coupling steering system that effectively counters the insufficiencies in motor torque and power during differentiated steering demands [13]. The system's capability has been rigorously validated through simulations, demonstrating its effectiveness in maintaining vehicle stability and enhancing maneuverability, particularly in steering scenarios that historically placed substantial demands on engine torque and power.
Overall, a review of the literature indicates that steering ability could potentially be synthesized and augmented through the application of either advanced closed loop control software or simpler software assisted by an optimized transmission mechanism. This work will focus on the development of control software using the former solution for dual independent electric drive.
The research extends the domain of knowledge by developing a special mobility control system for FNSS's specific series hybrid electric tracked vehicle. Emphasizing technological innovations in hybrid drive systems for armored combat vehicles, this work contributes the insights that improve the understanding and application of these systems, setting a foundational model for further study and practical deployment in the sector. The principal contributions and conclusions underscore the technology's progression in hybrid drive systems and exemplify their potential for robust, real-world functionality in military vehicle applications. Moreover, the study provides a comprehensive evaluation of the system performance under a variety of combat scenarios, ensuring that the vehicles are equipped to handle diverse and challenging terrains. Discussions included are not limited to theoretical assessments; they also present insights from extensive field tests that enhance the practical feasibility and dominance of the hybrid system.
2. Materials and Methods
The plant and control system models are deliberately designed to further research initiatives and assess the algorithm's performance with a variety of control inputs and driving cycles. The plant modeling incorporates power sources, the traction system, and the vehicle's framework, whereas the control system is explored in terms of power management and mobility control systems. These modeling activities are carried out distinctly for the plant and control systems, with this division to enable the examination of diverse vehicle configurations and powertrain systems. After each section is individually shaped, they are then unified to construct an integrated model depicted in Figure 3. A more detailed explanation of each model is provided in the following sections, offering a deeper insight into how each component functions within the entire system.
2.1. Modeling the Plant: Hybrid Electric Tracked Vehicle
In this section, attention is given to the modeling process for the plant of hybrid electric tracked vehicle. The focus is on the representation of hybrid electric propulsion systems specific to tracked vehicles and modeling techniques that capture the dynamic relationships between the traction system components and the vehicle's overall architecture. Furthermore, power sources are briefly defined even though the scope of this work is powertrain and mobility of the vehicle other than energy management.
2.1.1. Electric Traction System
The electric traction system, which is presented in a simplified schematic in Figure 4, is modeled through a composite approach that brings together the electric motors, gearboxes, and friction brakes connected to left and right sprockets. This configuration is carefully constructed to accurately reflect the system's mechanical and electrical interactions, ensuring that the model provides a realistic representation of the vehicle dynamics.
In this configuration, the e-motors are modeled as a source of torque featuring a unity transfer function, which means an absence of delay in the torque delivery upon request, as long as it does not exceed the motor's torque reserve. To preserve this characteristic, the system utilizes the smaller value between the requested torque and the available torque at the current shaft speed, as illustrated in equation (1). Subsequently, the torques generated by the motors are scaled by the gear ratio and modified for gearbox efficiency.
Tout,Motor = min{Tavail,Motor (w), TRequest}
In the equation (1); Tout,Motor, Tavail,Motor (w) and TRequest represent motor torque output, speed dependent available motor torque and requested torque via mobility control system, respectively. The speed dependent available motor torque is obtained from full load curve which represents speed-torque characteristics of the electric motor. Even though the full load curve is distinct to electric motors, it displays a standard trend: a constant torque at lower speeds transitioning to a constant power at higher speeds. This pattern is elaborated on in Aiso's research, as exemplified in Figure 5 [14].
Prior to transitioning to the vehicle dynamics calculations, the torques from the friction brakes are added to those from the gearbox output, as shown in equation (2). The resulting torque is then supplied to the subsystem governing the dynamics of the tracked vehicle.
TSprocket = iGB ηPT Tout,Motor - TBrake
In the equation (2), TSprocket, iGB, ηPT and TBrake represent sprocket torque output, gear ratio, powertrain efficiency and applied brake torque, respectively.
2.1.2. Dynamics of the Tracked Vehicle
The dynamics of the tracked vehicle are captured using a 3-DOF (degrees of freedom) vehicle model that considers the equations of motion along the longitudinal (x), lateral (y), and yaw (z) axes, which are detailed in Figure 6 for a left maneuver. These equations, detailed in Figure 6 for a left maneuver, are represented by (3), (4), and (5). They are derived for this maneuver, assuming a center of gravity in the middle of the lateral axis, unlike the longitudinal axis.
mVhc ax = (FTraction,left – FResistance,left) + (FTraction,right – FResistance,right) = ΣFx,i
mVhc ay = (QLateral,left + QLateral,right) xcenter,rear - (QLateral,left + QLateral,right) xcenter,front = ΣFy,i
IVhc,zz Φ’ = ΣFx,i yResultant – ΣFy,i xResultant
In expressions the terms mVhc, IVhc,zz, ax, ay, and Φ’ denote the mass of the vehicle, inertia about the vertical axis at the vehicle's center of gravity, accelerations in the longitudinal and lateral directions, and the rate of yaw, respectively. The forces FTraction,left, FTraction,right, FResistance,left, and FResistance,right are indicative of the traction and longitudinal resistance forces acting on the vehicle for left and right tracks, respectively. While QLateral,left and QLateral,right characterize the distributed side frictional forces per length interacting with the left and right tracks, lateral distance between vehicle’s cog (center of gravity) and vehicle’s front and rear end are denoted by xcenter,front and xcenter,rear. Furthermore, the net forces along the longitudinal and lateral axes are given by ΣFx,i and ΣFy,i, with the corresponding distances from these net forces to the vehicle's center of gravity being represented by xResultant and yResultant correspondingly.
Dynamic calculations are followed by integrations of computed accelerations to obtain speed components of the vehicle in longitudinal, lateral and yaw axes.
2.1.3. Power Sources
Power sources for the hybrid vehicle comprise a combination of a battery and a generator set involving a diesel engine and an electric generator. In this work, it is assumed that the available power and the summation of the power sources’ reserve remains constant for a clear investigation of the mobility control system.
2.2. Mobility Control Method
- Control Theory and Big Picture
Based on the research and findings presented in previous sections, it is found that the vehicle in question, a high-speed off-road military vehicle, requires a strong and effective closed-loop control system to achieve the targeted maneuverability at high speeds across various terrains. It has been determined that while producing the overall torque in response to the driver’s input is correlated with accelerator pedal position, the distribution of the torque should be adjusted based on the feedback from the speed difference between the sprockets. This differential is related to the angle of the steering wheel set by the driver. In other words, a certain speed differential between the electric motors is decided, corresponding to the given steering wheel angle, through the employment of the closed-loop controller. The strategy for mobility control can be seen in Figure 7, demonstrated via block diagrams. There are four primary subsystems, each with special roles. The Driver block is designed to feed specific driver commands for varying test runs and is separate from the onboard vehicle control system. The Driver command preprocessor and the closed-loop controller blocks are critical to the control system, handling the computational side of mobility control and transforming driver instructions into specific torque demands for the left and right motors. Lastly, the traction system represents the plant including mathematical models of the electric motor and gearbox. The outputs from the traction system are the torques delivered to the left and right sprockets, which are main inputs of the vehicle dynamics model.
- Preprocessing and Shaping Control Commands
Within the Driver Command Preprocessor section, throttle and steering inputs are preprocessed depending on the selected gear and current vehicle speed. The shaping of the inputs is performed by three main functions: Steering shaping, pivot shaping and throttle shaping.
The steering shaping function targets to transform steering commands into differences in motor velocities through a suitable shaping strategy. FNSS has compiled test records from standard tracked vehicles for calibration purposes. Upon analyzing the change in speed at maximum steering, a pattern is noted where the difference in speed across the motors at full steer changes with vehicle velocity. However, this increase is interrupted by sudden changes at certain velocities, making the pattern non-linear. Closer inspection shows that these dips coincide with the gear shifting points of traditional gearboxes. For a consistent steering behavior, a smooth curve is mapped over the test data, excluding these dips. The normalized version of this test data together with the smoothing curve is depicted in Figure 8, ensuring confidentiality.
To further refine the steering shaping's effectiveness, FNSS has incorporated adaptive elements into the function to cater to a range of variables, such as terrain type, vehicle mode, and selected gear. This adaptive approach ensures that steering inputs are not only translated into consistent motor velocity differences across the usual operational spectrum but also provides compensation for less predictable conditions that could affect handling such as the scenario in which one of the tracks is in contact with a more slippery surface. By integrating a dynamic feedback loop, steering inputs result in real-time adjustments to the motor outputs, thus delivering an enhanced and more responsive driving experience for operators.
The pivot maneuver is executed through a specifically designed shaping function. Initially, the maximum speed range is established. Subsequently, the position of the accelerator pedal is correlated to this range to achieve the required speed differential. In addition, the angle of the steering wheel is utilized to decide the pivot turn's direction, allowing the driver to command a counterclockwise (CCW) or clockwise (CW) rotation by steering, regardless of the actual degree of the wheel's turn. The plot for this pivot shaping strategy can be found in Figure 9, providing a visual representation of the maneuvering process.
Enhancing the pivot shaping function further, FNSS has considered vehicle load dynamics to ensure stability during pivot turns. The shaping strategy is thus calibrated to maintain the vehicle's balance by investigating vehicle dynamics in offline simulation environments and real time tests for different conditions. This calibration is particularly critical when operating with varying loads or executing pivots on steep gradients.
The throttle shaping function is developed to adjust the input received from the accelerator pedal based upon the selected vehicle mobility mode, with the objective of improving the driver's experience. This is achieved by mapping the position of the pedal to specific throttle values, which correspond to a range of distinct operational modes, as depicted in Figure 10.
In scenarios where safety is significant, such as in the preliminary testing phase of the algorithm, a conservative throttle response is preferred. This scenario is optimally supported by a shaping function like option 1 in Figure 10, which is characterized by a more gradual and controlled acceleration curve. On the other hand, for circumstances that demand more robust and dynamic performance, such as during an aggressive driving test, the shaping curve should approach option 3 in Figure 10. This latter option is fine-tuned to yield a sharper and more immediate increase in throttle response, reflecting the vehicle's need for rapid acceleration. Throughout many testing protocols and simulation exercises, option 2, which represents a linear throttle shaping, is the preferred choice. This option is beneficial because it provides a straightforward correlation between pedal input and throttle output. Such predictability enables control engineer to isolate and evaluate the performance characteristics of each subsystem without the added complexity that non-linear shaping options might introduce.
By employment of these shaping functions, total cumulative torque demand and desired speed difference variables are designated. Based on these desired inputs, a closed loop motion controller is operated, and torque demands of left and right traction motors are determined.
2.3. Power Management Method
The mobility control system serves a dual purpose within the vehicle's control architecture. Primarily, it is responsible for directly actuating the traction motors. However, the scope of the mobility control system's functionality extends to playing a key role in the vehicle's overall power management by continuously monitoring the instantaneous power requirements of the traction system.
As the vehicle operates, the mobility control system calculates the immediate power demands needed for traction by multiplication of torque demand, measured speed and corresponding traction efficiency. Once the power calculations are performed, the mobility control system communicates a traction power request to the power management algorithm which is another significant system of the hybrid tracked vehicle in question as explained in the work of Akar et al. [15].This request for power is carefully evaluated to control how the power management system should regulate the generator set's output. By providing this traction power request, the mobility control system ensures that the power management system can adjust the generator's output dynamically, matching the generated power with the traction system's demands. This synchronous operation is crucial for ensuring that the difference between generated and demanded power does not exceed the limits of electric battery.
Another aspect influenced by traction power is the sizing of the EV battery and configuration of the generator set, dictating the selection of an internal combustion engine and electric generator of optimal size. This choice becomes even more complex as power requirements directly impact other considerations for battery and generator selection. Choosing the appropriate battery for a specific application relies on assessing key battery properties and finding the right balance among them. For electric and hybrid vehicles, crucial factors include the necessary power and range, which dictate the battery pack design, within the constraints of available space. While lithium-ion (Li-ion) batteries are prevalent due to their high energy density, significant voltage output, and minimal maintenance, no single battery type is universally optimal for all uses. After the assessments of the environmental conditions, Li-ion type battery is used in this vehicle and control parameters are tuned accordingly.
3. Simulations and Results
Using the modeling approach and equations mentioned previously, mobility control system is developed and simulated using MATLAB Simulink. An overview of the Simulink model is illustrated at Figure 11.
The functional scenarios that include pivot maneuvers, steering actions, forward and reverse movements are studied by extensive simulations to analyze the vehicle's behavior under various operational conditions. To analyze the results, a simulation postprocessing interface has been developed, which permits the in-depth observation of the vehicle's motion dynamics and the associated responses from the powertrain, including variables like sprocket torques and track speeds.
An example of this simulation platform can be seen in Figure 12, which specifically illustrates the interface during a scenario involving a forward steering motion at a predetermined longitudinal speed of the vehicle. In this simulation, it is observed that upon reaching the 50th seconds of the simulation time, the driver introduces a steering command, inputting a 40% steering angle into the system. Due to this action the motor torques experience a substantial and rapid increase. After this initial jump in torque, caused by the need to adjust the vehicle's trajectory according to the steering input, the motor torque levels exhibit a stabilization, converging to a steady-state value. Steady state torques involved in steering are now balanced, and the vehicle is maintaining the new desired directional path at a constant speed.
Additionally, Figure 13 indicates that the speed differential between the left and right electric motors reaches the preset target specified by the steering shaping function. An upward trajectory in speed difference is observed as the steering input rises, a response predicted from the closed-loop control system. The presence of noise in the actual speed differential originates from the characteristics of the electric motors' encoders. It is assumed that the encoders are influenced by white noise to test the controller's capability to cope with this type of disturbance.
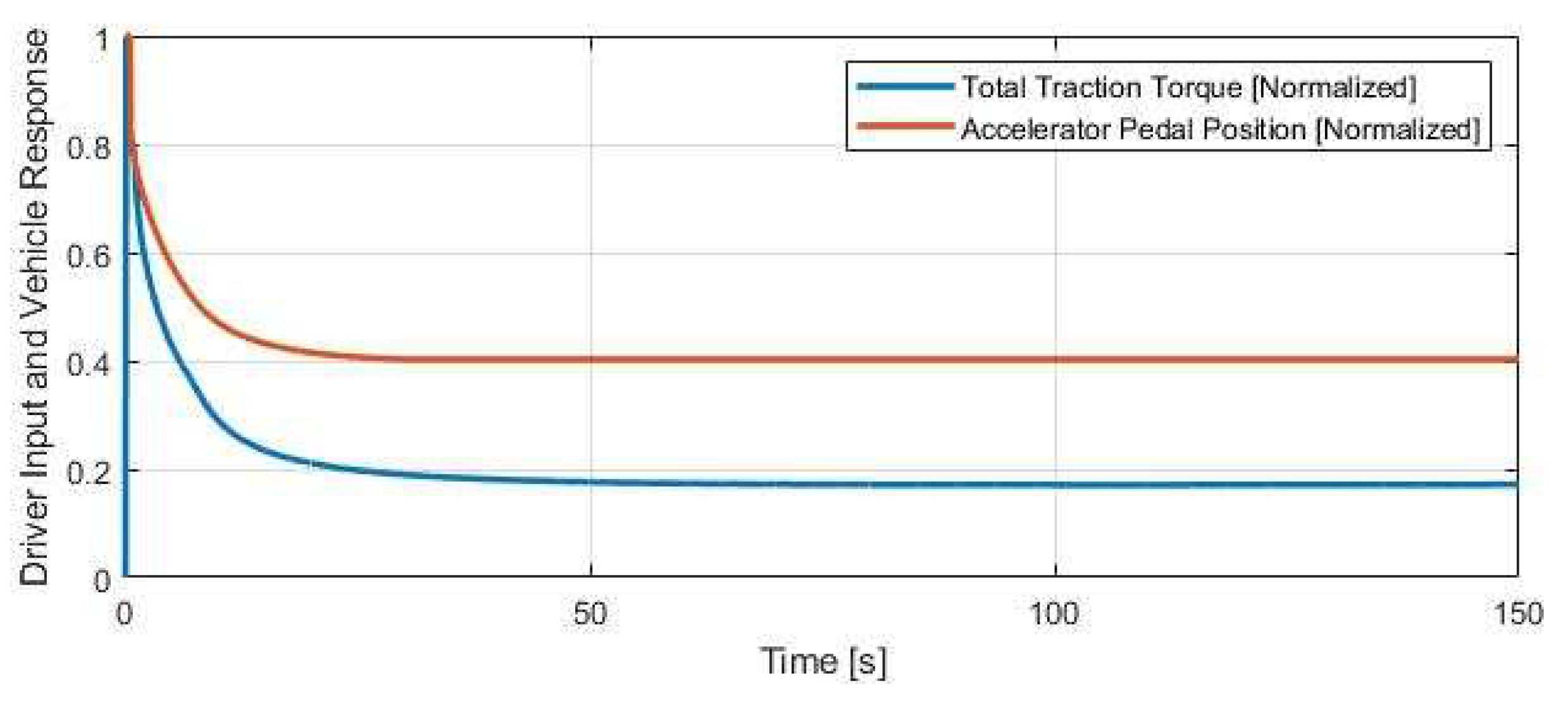
Observations of the vehicle's longitudinal response are demonstrated via Figure 14 as well. It is noted that there is a proportional increase in the vehicle's total torque correlating with the rise in the accelerator pedal position, regardless of the steering input. This effect is realized by applying a linear throttle shaping function as explained in the mobility control system section.
The simulations successfully confirmed the effectiveness of the control methods discussed earlier for shaping vehicle dynamics, ensuring that the system can fully manage both the total traction force and the vehicle's turning radius based on driver commands. This controllability enables consistent maneuvering at fixed speeds in straight lines as well as during complex directional changes where high maneuverability is required. The ability to precisely adjust the speeds of individual sprockets strengthens the vehicle's flexibility to cope with different terrain types and driving conditions, while enhancing the system's overall handling and dependability.
4. Discussion and Conclusion
This document investigates the mobility control system of a series hybrid electric tracked vehicle. The objective of the system is to control the electric motor torques to produce the entire torque demanded by the throttle, while achieving the necessary speed differential when steering inputs are made. Traditional testing methods on the electrified tracked vehicle helped establish the speed differential target.
Results from practical demonstrations indicate that the intended motion is achievable with the deployed mobility control system. The findings, thus, suggest that similar architectures can be applied generically across the domain of electric propulsion systems in heavy-duty vehicles. Moreover, the speed differential methodology enhances system adaptability across varying terrains. Even though different friction coefficients may necessitate varied sprocket torques for steering actions, the employment of a closed-loop speed differential strategy yields the correct sprocket torques. This validates the significance of torque management and its responsiveness to external conditions, which holds universality for other applications. Variations in radius due to changes in slip characteristics are compensated for by the driver's input, effectively incorporating human interaction as part of the loop.
The integration of regenerative braking into the series hybrid system that enables the transmission reversibility further demonstrates the potential for increased efficiency and reduced wear on braking components. By converting kinetic energy into electrical energy during deceleration phases, energy is fed back into the battery, thus extending the operational range of the vehicle. Initial tests exhibit promising results, with noticeable energy recovery without compromising the stability or control of the vehicle. The ability of regeneration for the hybrid system is critically important since the vehicle in question is a high-weight off-road machinery operating on inclines, where reversibility becomes crucial for boosting efficiency. In such challenging environments, the system's ability to convert kinetic energy into electrical energy for storage in the battery significantly enhances the operational range and energy conservation, underscoring its value for vehicles navigating steep terrain. The interaction between regenerative braking and torque distribution algorithms is crucial; it maintains driving dynamics that are consistent with driver expectations. This addition to the mobility control system complements the existing architecture, presenting a beneficial approach to vehicle energy management and efficiency optimization.
Mobility control system represents a significant advancement in the management of series hybrid electric tracked vehicles, and future refinements could be made to fine-tune the relationship between driver inputs and vehicle performance, supporting the human-machine interface for optimal control. Furthermore, current studies show that the transition from engine-driven auxiliary systems to electric-powered ones is accelerating [16]. This transition not only streamlines the management of auxiliary systems but also reinforces the essential connection between vehicle efficiency and advanced control technologies, setting a benchmark for future EV system innovations. Illustrative of this trend is the work by Pugi et al. (2021), which highlights the significant enhancements made in electric directional drilling machines, marking them as exemplary cases of electrification in auxiliary elements and contributing to the sustainable progress of urban infrastructure development [17].
In conclusion, the findings presented herein emphasize the generic value of this research in shaping the future of vehicle control systems. Particularly, the control of electric motor torques within a high-inertia platform of armored tracked vehicles demonstrates the agility that can be attained through advanced engineering. The closed-loop speed differential control system offers a new paradigm in mobility, where the precision and adaptability are improved together by promoting a high-level of responsiveness relative to conventional tracked vehicles. The mobility control enhances vehicle management and performance, while efforts to electrify auxiliary systems contribute to the overall efficiency and evolution of electric vehicle technologies. Finally, the navigation strategies developed here could serve as a basis for autonomous or semi-autonomous control systems in similar military vehicles, significantly impacting the field of vehicle automation.
Author Contributions
Conceptualization, D.Ç. and V.K.; methodology, D.Ç. and V.K.; software, D.Ç.; validation, D.Ç. and V.K.; formal analysis, D.Ç. and V.K..; investigation, D.Ç. and V.K.; resources, D.Ç. and V.K.; data curation, D.Ç. and V.K.; writing—original draft preparation, D.Ç.; writing—review and editing, D.Ç. and V.K.; visualization, D.Ç. and V.K.; supervision, D.Ç. and V.K.; project administration, D.Ç. and V.K.; funding acquisition, D.Ç. and V.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work was carried out in the Hybrid Electric Tracked Vehicle Development project of FNSS Savunma Sistemleri A.Ş. and the work is fully funded by FNSS Savunma Sistemleri A.Ş.
Data Availability Statement
The data and software materials of this research are owned by FNSS Savunma Sistemleri A.Ş. and cannot be shared due to confidentiality policies of the company.
Acknowledgments
Our thanks go to the R&D Team at FNSS Savunma Sistemleri A.Ş. whose assistance was crucial in completing this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sivakumar, P.; Venkatesan, G.; Viswanath, H.; et al. Configuration Study of Hybrid Electric Power Pack for Tracked Combat Vehicles. Defence Science Journal 2017, 67, 354–359. [Google Scholar] [CrossRef]
- Randive, V.; Subramanian, S.C.; Thondiyath, A. Design and analysis of a hybrid electric powertrain for military tracked vehicles. Energy 2021, 229. [Google Scholar] [CrossRef]
- FNSS. Available online: https://www.fnss.com.tr/en (accessed on 6 November 2023).
- Çeliksöz, D.; Kılıç, V. Motion Control System Development of Serial Hybrid Electric Tracked Vehicles. 36th International Electric Vehicle Symposium and Exhibition (EVS36), Sacramento, California, USA, 11-14 June 2023.
- Zhang, J.; Ma, X.; Yuan, D. et al. Steering Control of Dual Electric Drive Tracked Vehicle Based on Model Predictive Control. IOP Conference Series: Materials Science and Engineering 782, Qingdao, China, 28-29 December 2019. [CrossRef]
- Ze-yu, C.; Cheng-ning, Z. Control strategy based on BP neutral network plus PID algorithm for dual electric tracked vehicle steering. 2nd International Conference on Advanced Computer Control, Shenyang, China, 27-. 29 March. [CrossRef]
- Hu, J.; Tao, J.; Zhao, W.; et al. Modeling and simulation of steering control strategy for dual motor coupling drive tracked vehicle. Journal of the Brazilian Society of Mechanical Sciences and Engineering 2019, 41. [Google Scholar] [CrossRef]
- Pei, L.; Yan, J.; Tu, Q.; et al. A Steering Control Strategy Based on Torque Fuzzy Compensation for Dual Electric Tracked Vehicle. Filomat 2018, 32. [Google Scholar] [CrossRef]
- Kotiev, G.; Padalkin, B.; Miroshnichenko, A. et al. A Theoretical study on the high-speed electric tracked vehicle mobility. IOP Conference Series: Materials Science and Engineering 820, Moscow, Russian Federation, 1-2 October 2019. [CrossRef]
- Zhai, L.; Zhang, X.; Wang, Z.; et al. Steering Stability Control for Four-Motor Distributed Drive High-Speed Tracked Vehicles. IEEE Access 2020, 8. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T. M.; Wang, Q; et al. Lateral stability control of dynamic steering for dual motor drive high-speed tracked vehicle. International Journal of Automotive Technology 2016, 17, 1079–1090. [Google Scholar] [CrossRef]
- Huang, H.; Zhai, L. ; A Power Coupling System for Electric Tracked Vehicles during High-Speed Steering with Optimization-Based Torque Distribution Control. Energies 2018, 11, 1538. [Google Scholar] [CrossRef]
- Zhai, L.; Huang, H.; Kavuma, S. Investigation on a Power Coupling Steering System for Dual-Motor Drive Tracked Vehicles Based on Speed Control. Energies 2017, 10. [Google Scholar] [CrossRef]
- Aiso, K.; Akatsu, K. Performance Comparison of High-Speed Motors for Electric Vehicle. World Electr. Veh. J. 2022, 13, 57. [Google Scholar] [CrossRef]
- Akar, A.; Çalık, G.; Çeliksöz, D. Battery Sizing & EV Mode PMU Algorithm in Military Armored Hybrid Electric Vehicles. 36th International Electric Vehicle Symposium and Exhibition (EVS36), Sacramento, California, USA, 11-14 June 2023.
- Charged EVs. Electrifying Auxiliaries: A Flexible System Approach for Multiple Auxiliaries. Available online: https://chargedevs.com/newswire/electrifying-auxiliaries-a-flexible-system-approach-for-multiple-auxiliaries (accessed on 22 January 2024).
- Pugi, L.; Berzi, L.; Grasso, F.; et al. Design and Simulation of an Electrified Directional Drilling Machine. International Journal of Mechanics and Control 2021, 22, 17–29. [Google Scholar]
Figure 1.
KAPLAN HYBRID, Developed by FNSS [3].
Figure 1.
KAPLAN HYBRID, Developed by FNSS [3].

Figure 2.
Torque fuzzy compensation control strategy [8].
Figure 2.
Torque fuzzy compensation control strategy [8].
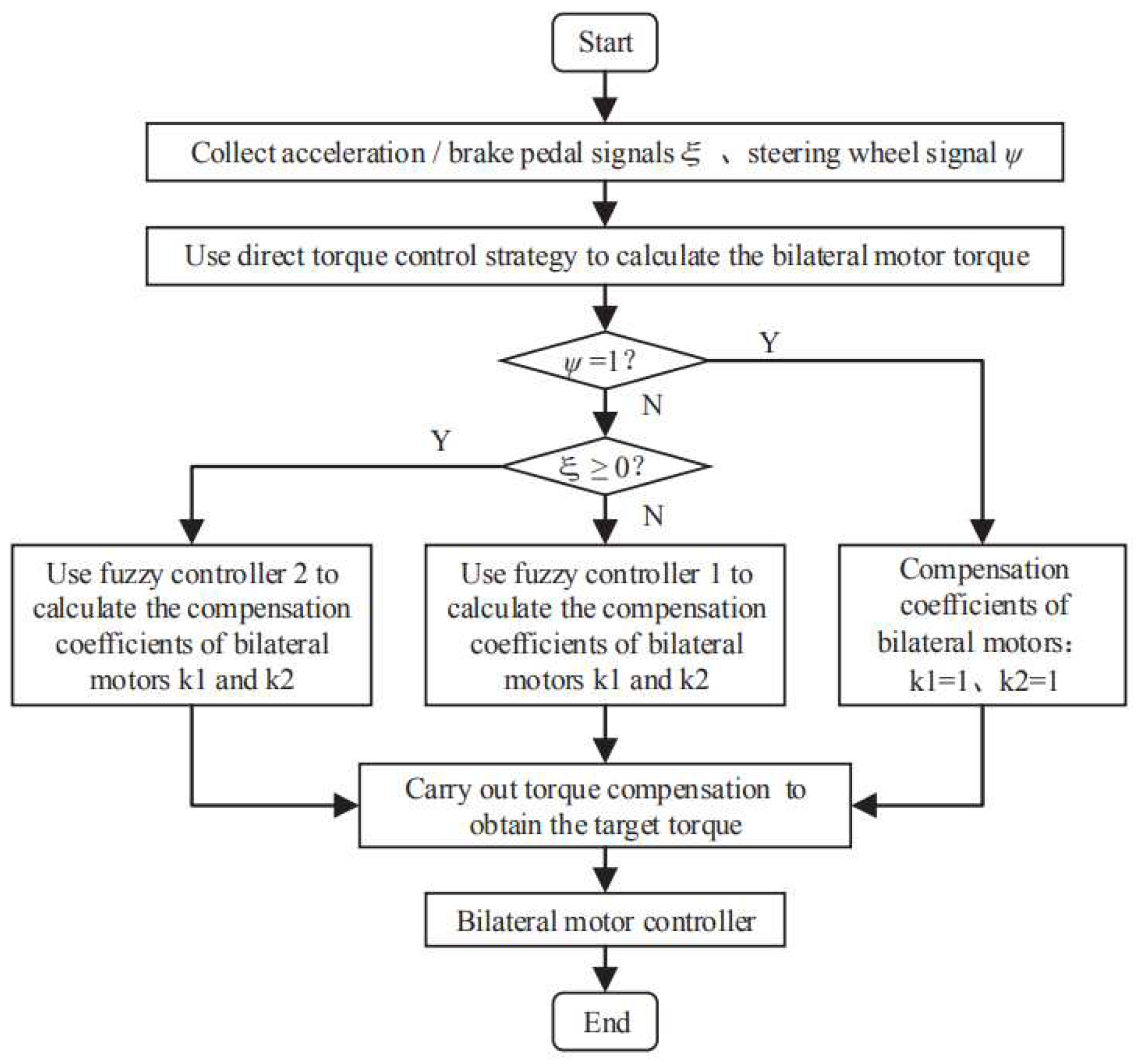
Figure 3.
Block Diagram of the Hybrid Tracked Vehicle Model and Controller.
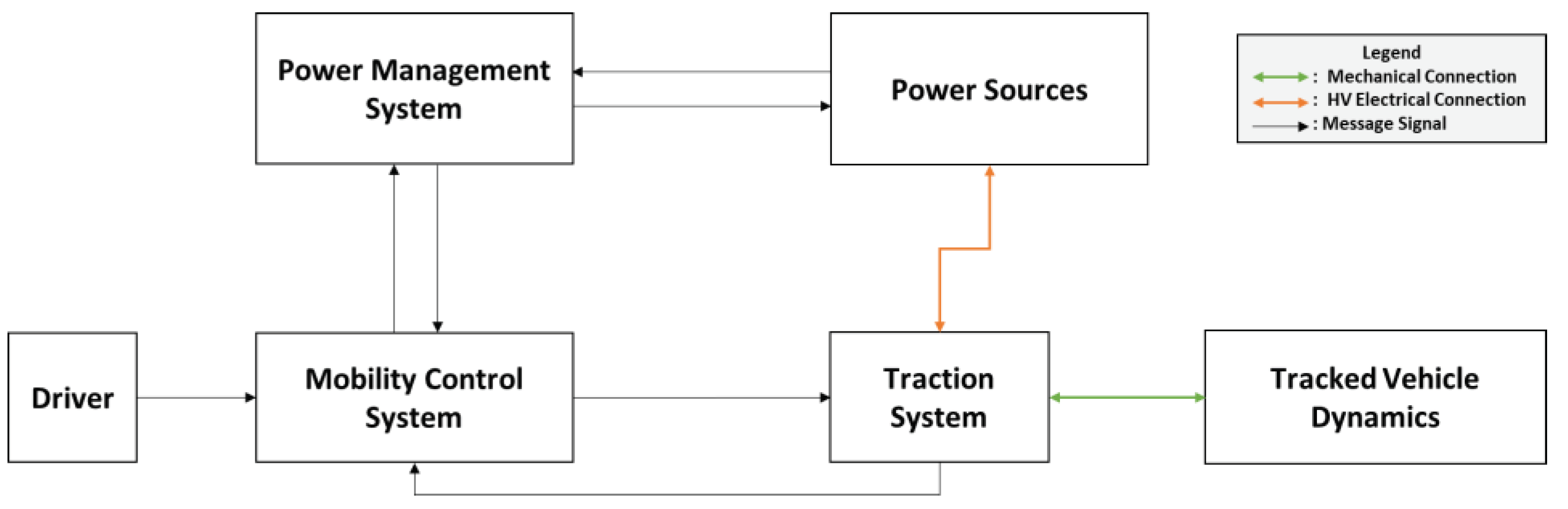
Figure 4.
Schematic of Electric Traction System.
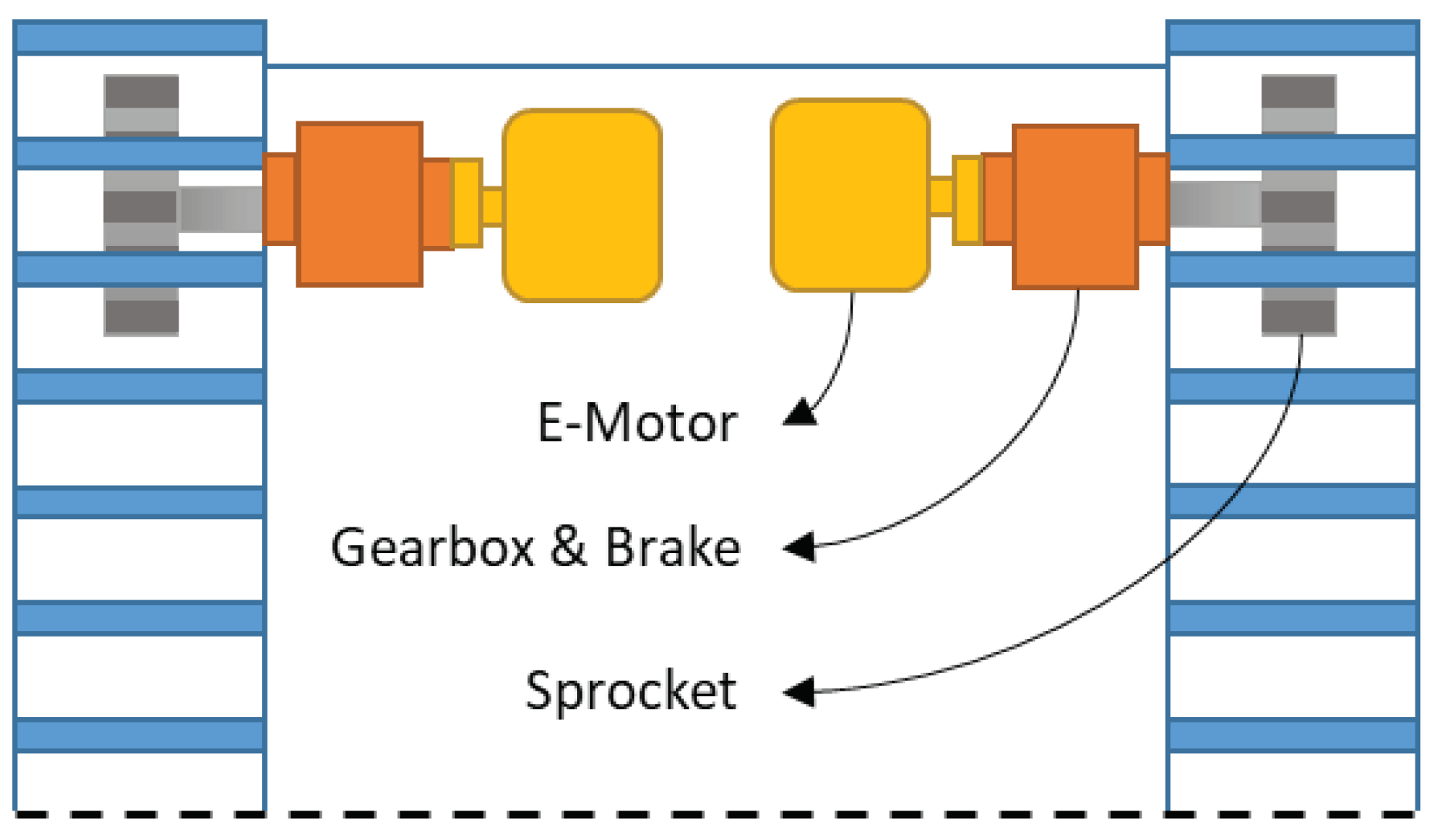
Figure 5.
Full Load Characteristic Curve for an Electric Motor [14].
Figure 5.
Full Load Characteristic Curve for an Electric Motor [14].
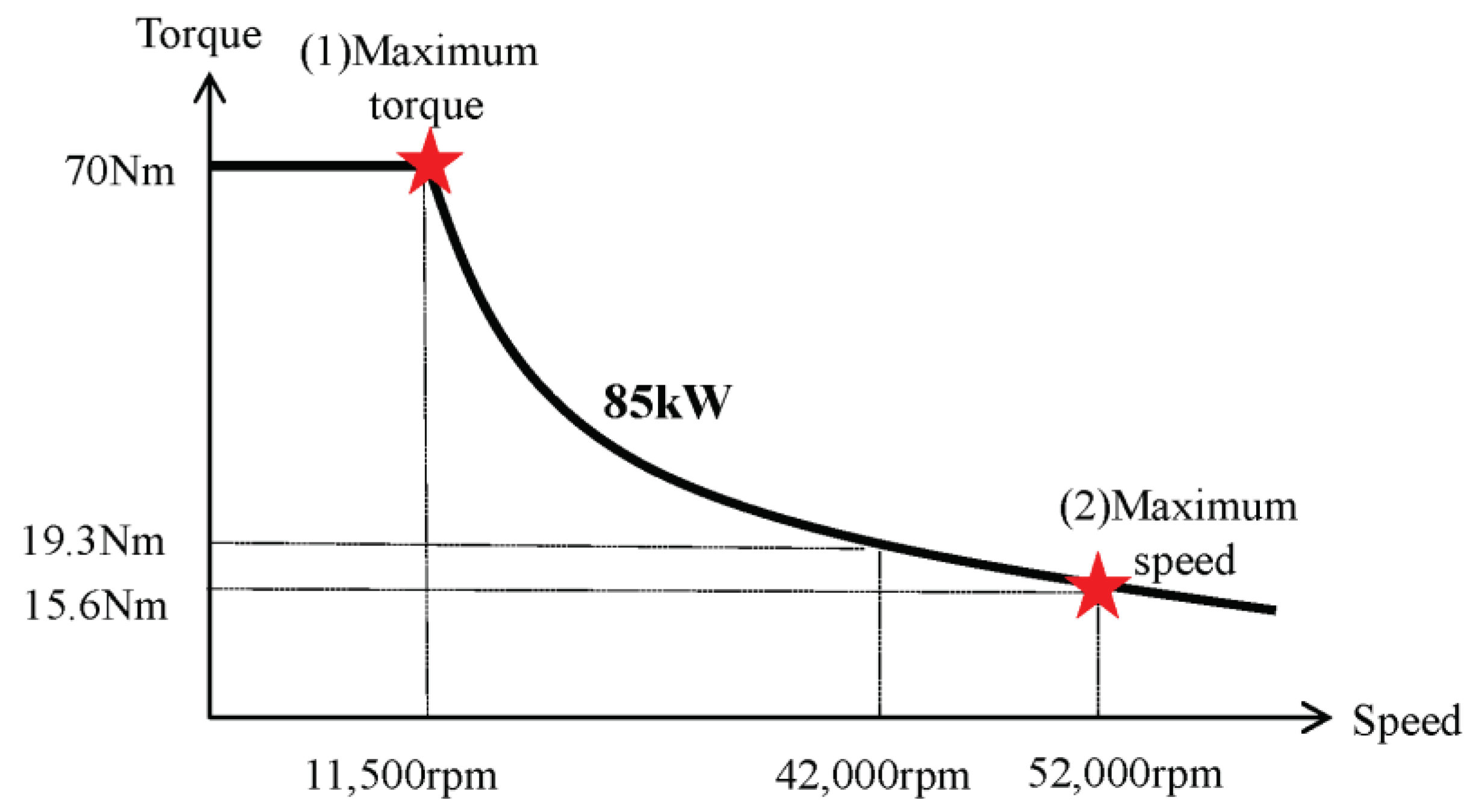
Figure 6.
Loads on a tracked vehicle during left maneuver.
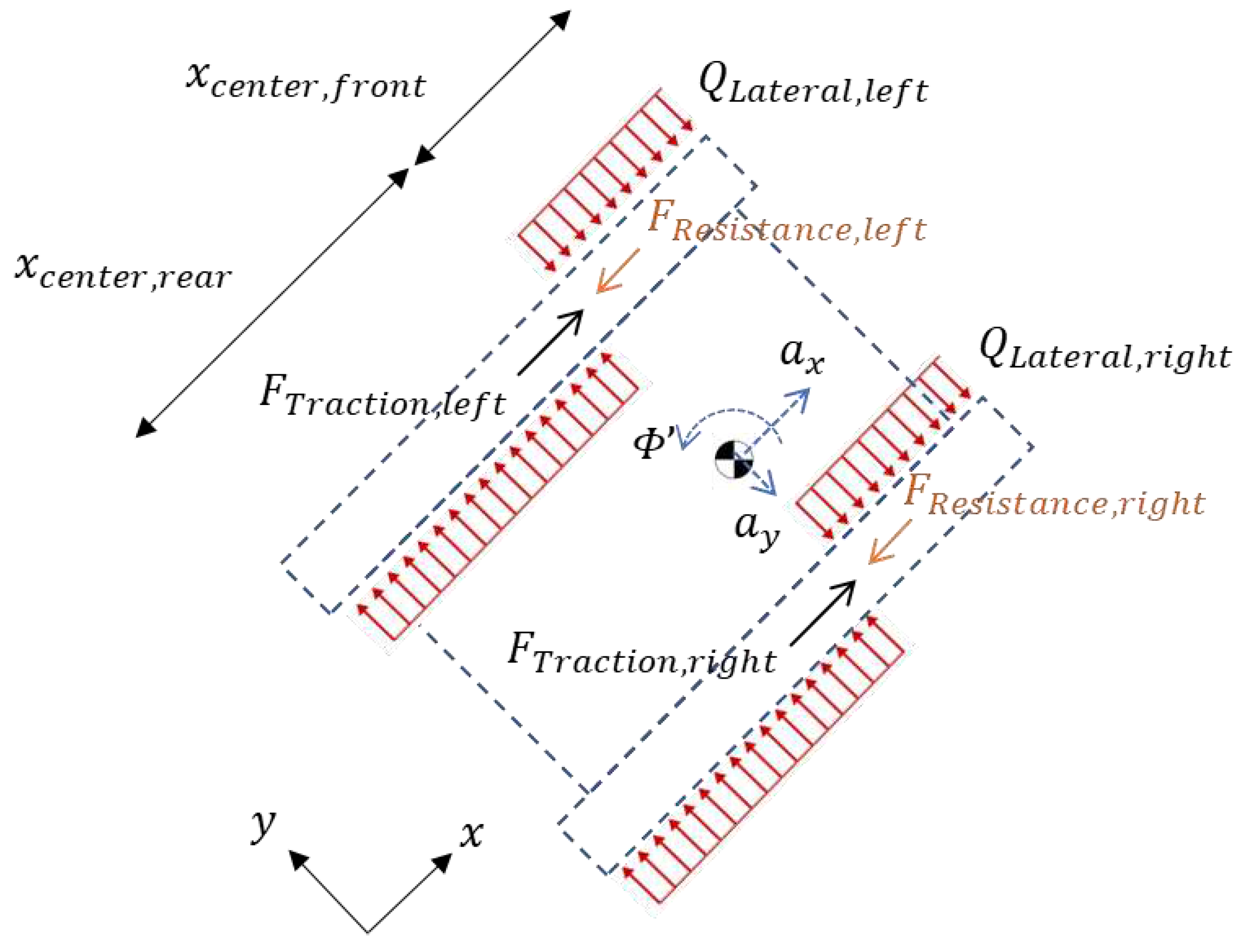
Figure 7.
Big Picture of Mobility Control System.
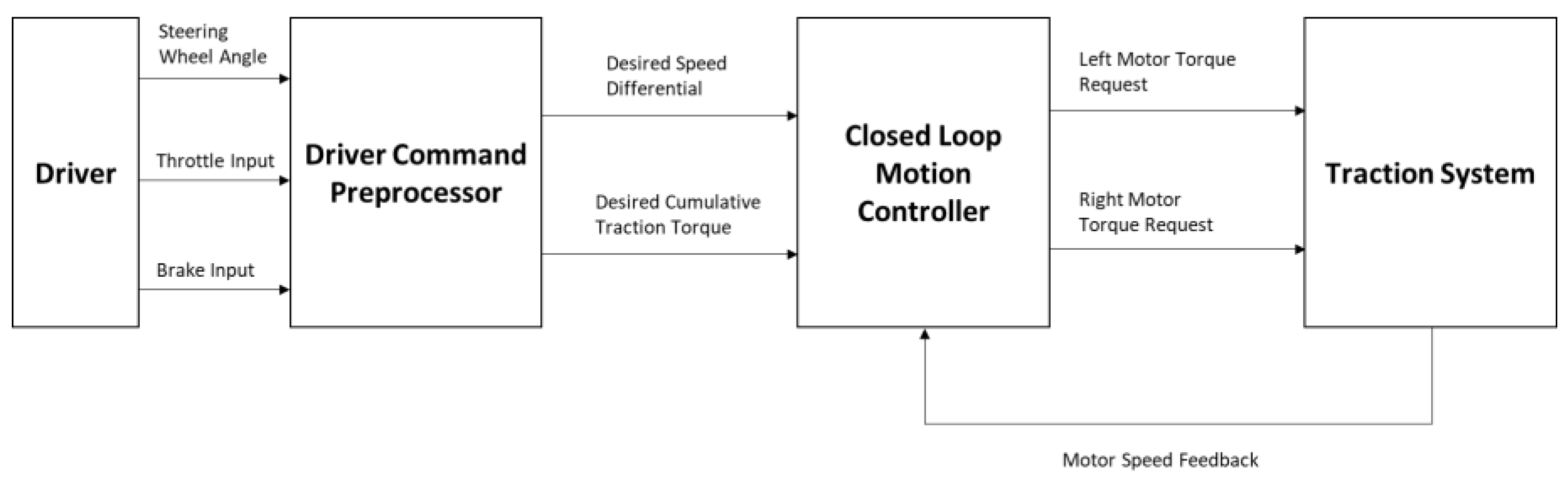
Figure 8.
Steering Shaping Strategy in Normalized Form.
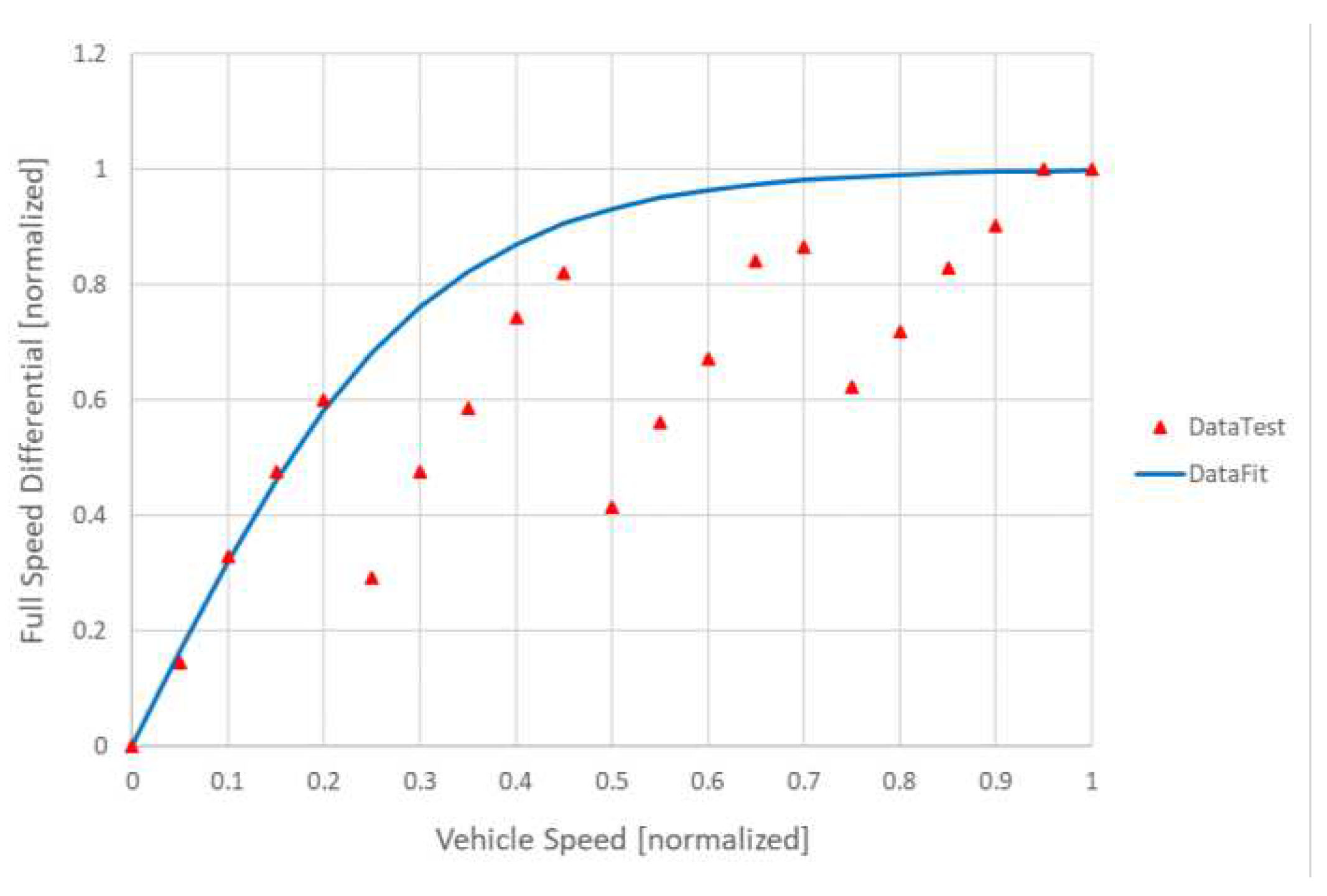
Figure 9.
Pivot Shaping Strategy in Normalized Form.
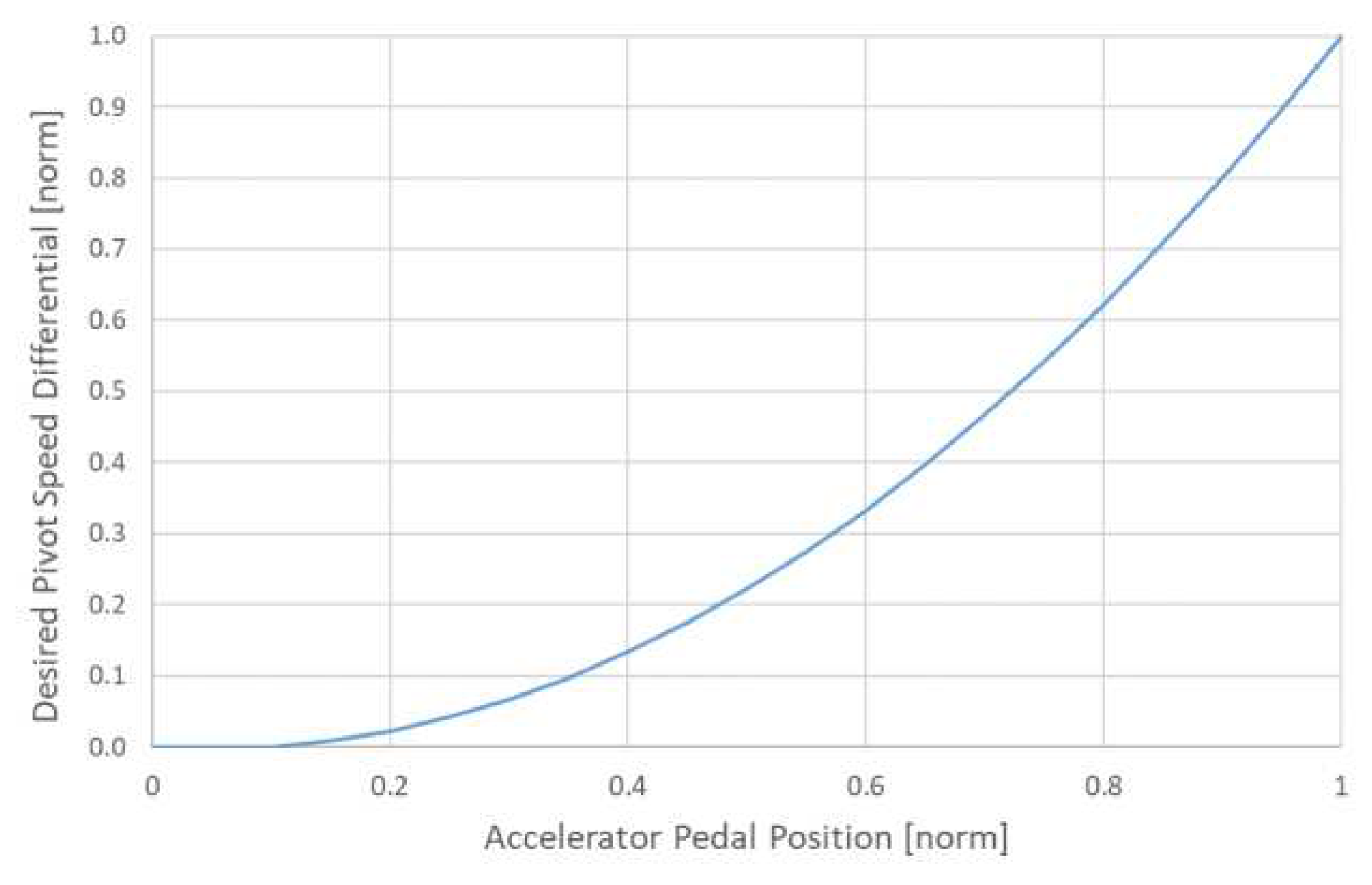
Figure 10.
Throttle Shaping Options.
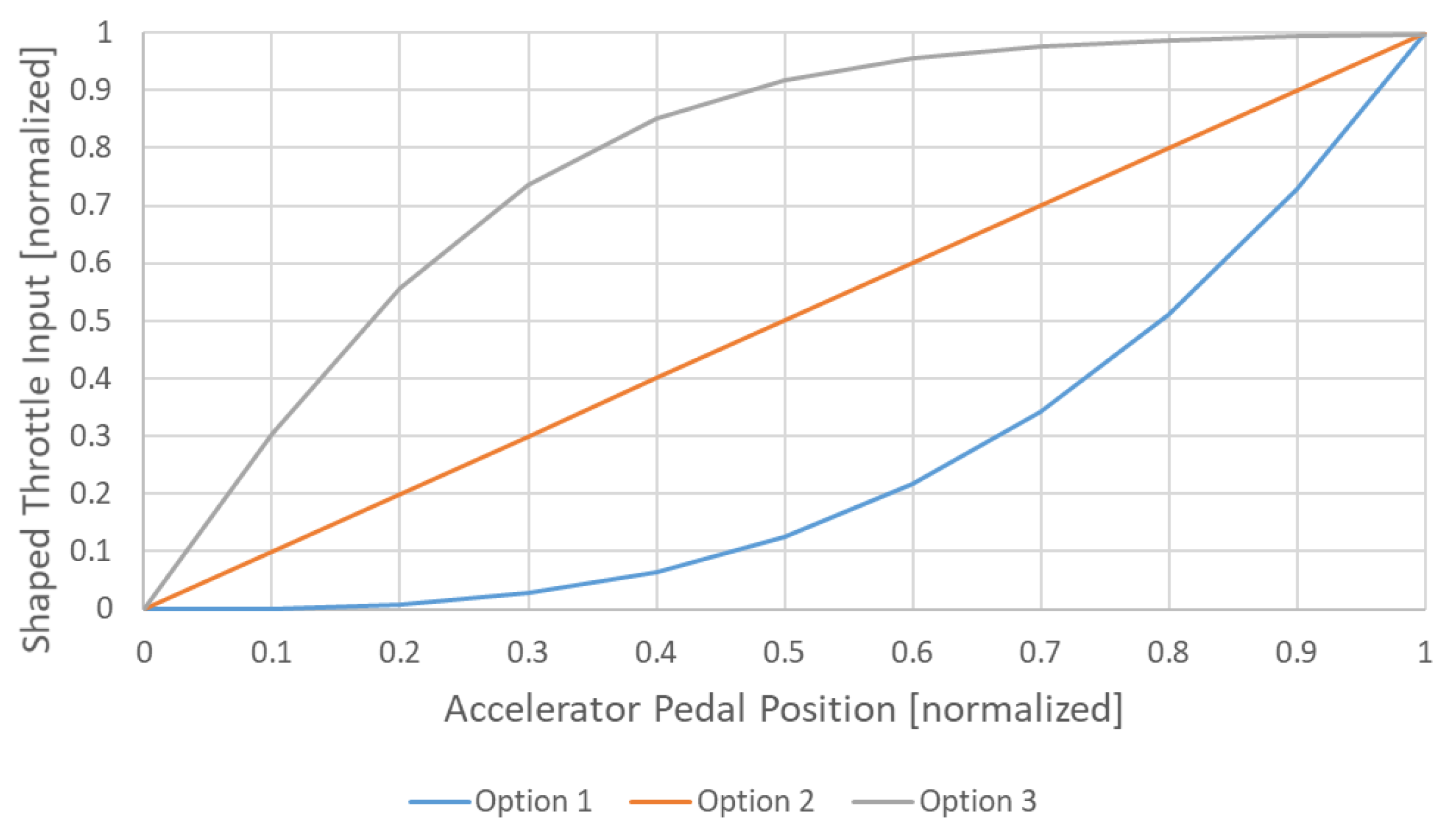
Figure 11.
Simulink Model of the Hybrid Tracked Vehicle.
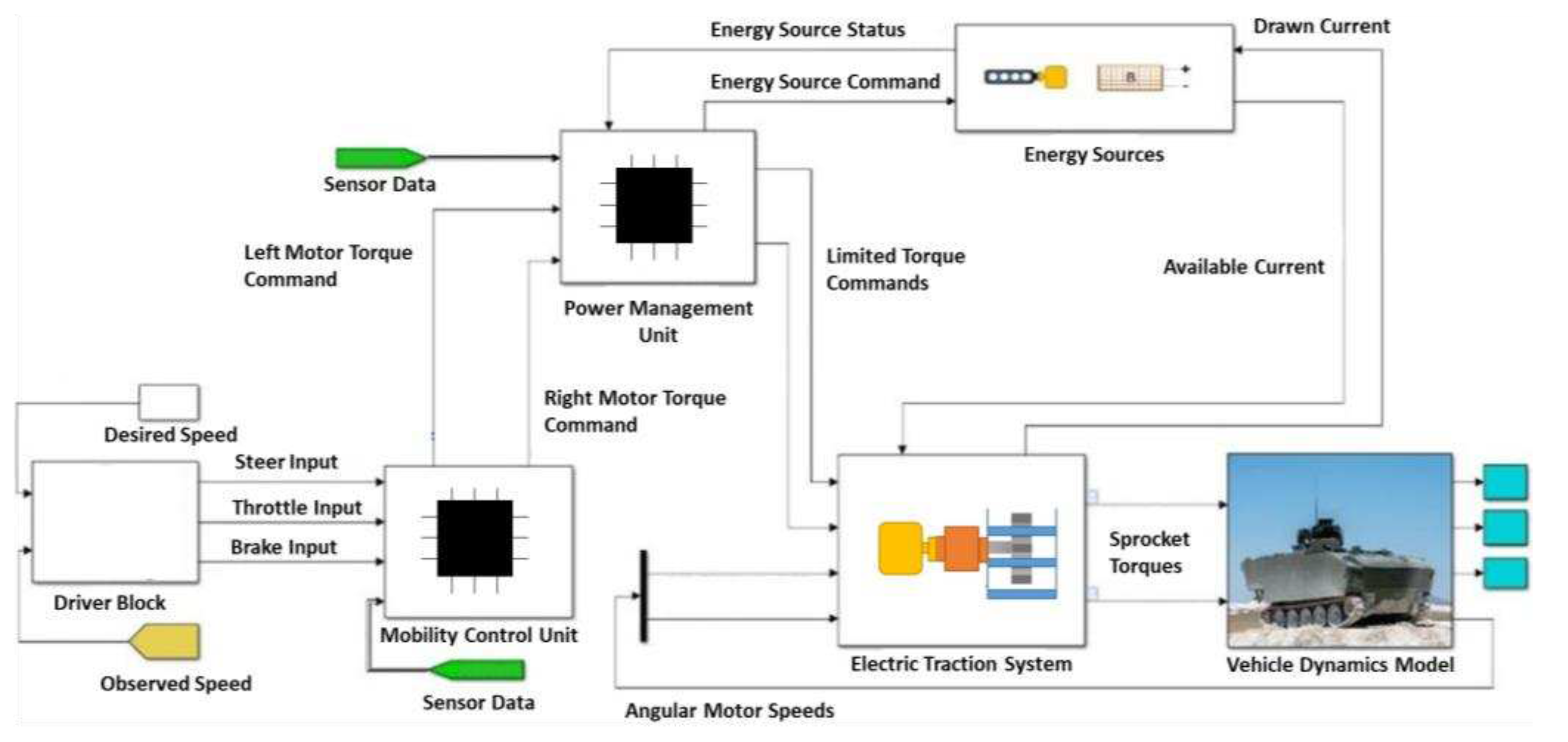
Figure 12.
Simulation Interface for a Cornering Maneuver.
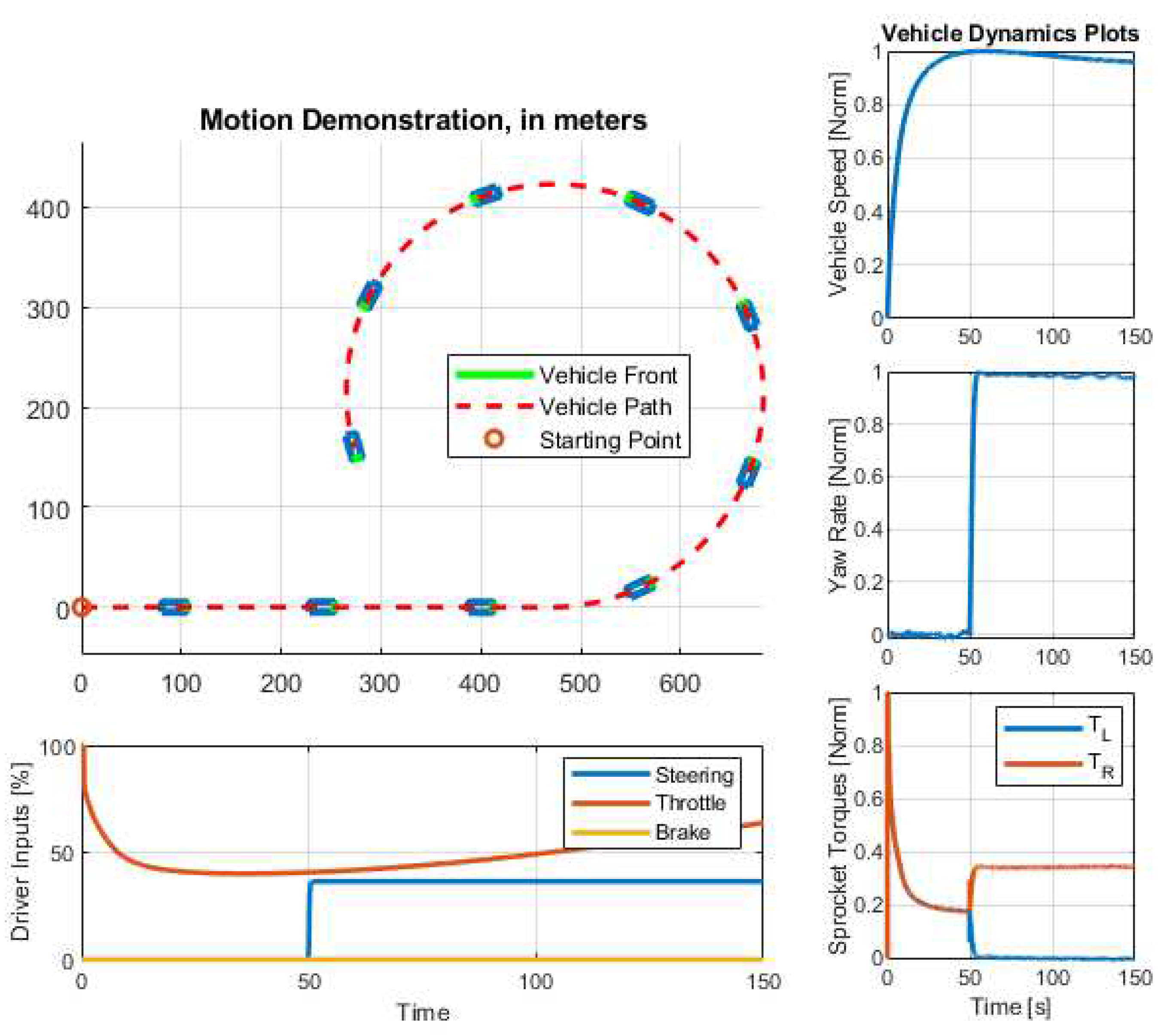
Figure 13.
Speed Differential During Cornering.
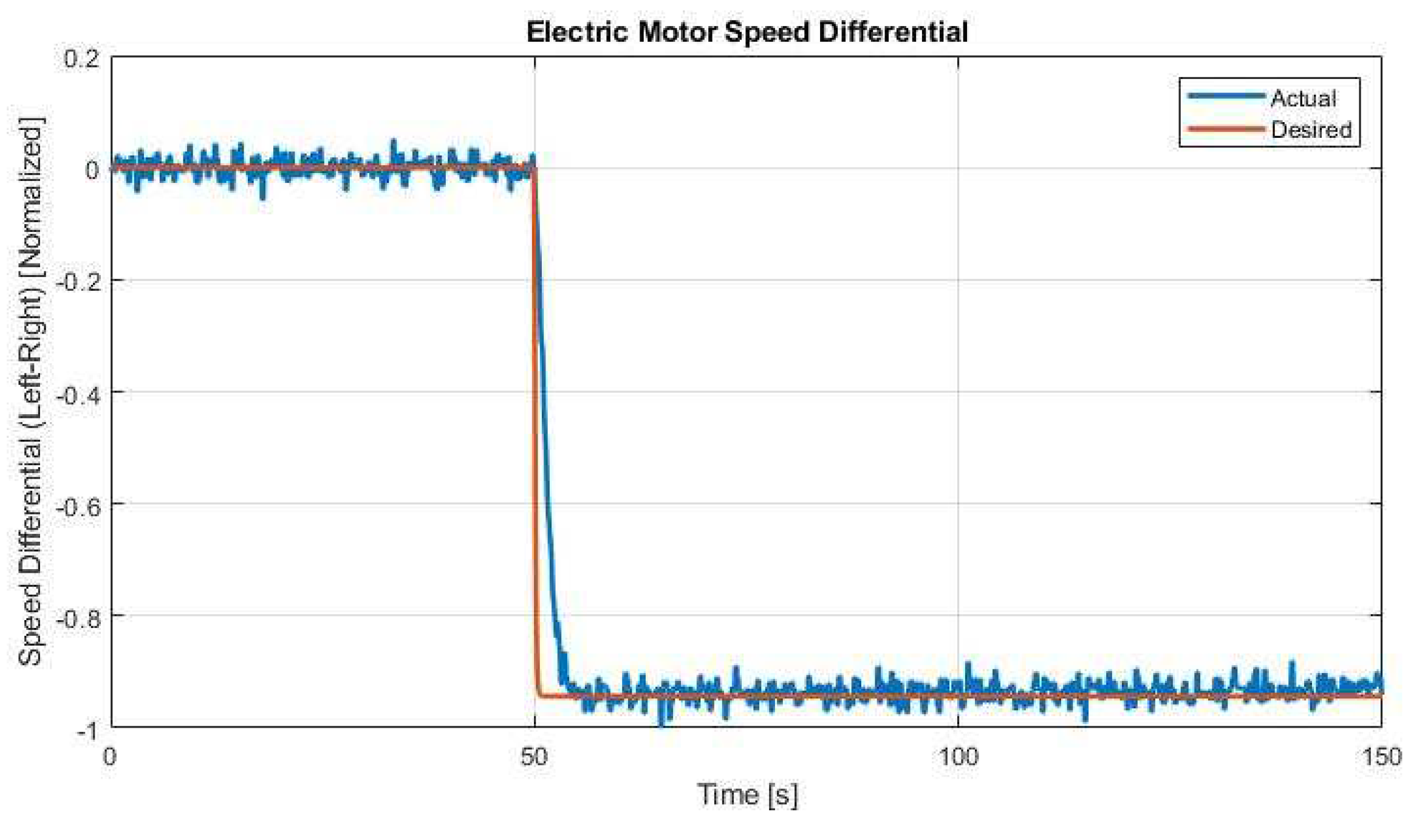
Figure 14.
Total Traction Torque of the Vehicle in Response to Accelerator Pedal Position.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



