
Submitted:
06 February 2024
Posted:
06 February 2024
You are already at the latest version
Abstract
The most commonly used real-time augmentation services in China are International GNSS Service (IGS) real-time service, PPP-B2b service, and BeiDou Satellite-Based Augmentation System (BDSBAS) dual-frequency augmentation service. However, the research on the performance evaluation, comparison and application scope of these three products is still unknown and unrevealed. This article introduces methods for obtaining real-time augmentation information and real-time orbit and clock offset recovery. Based on real-time orbit and clock offset accuracy, positioning accuracy, and positioning availability, it systematically evaluates the performance of CNES, PPP-B2b, and BDSBAS augmentation information. The results indicate that the radial accuracy of CNES and PPP-B2b real-time orbit products is consistent, and the Root Mean Square (RMS) is better than 5 cm. CNES can achieve centimeter-level accuracy in both along-track and cross-track components, surpassing the decimeter-level accuracy of PPP-B2b. Both services demonstrate consistent accuracy in real-time clock offset, with PPP-B2b showing similar standard deviations (STD) of 0.16 ns for different satellites. However, for CNES, the STD of real-time clock offset varies for GPS, BDS-3 MEO, and BDS-3 IGSO satellites, with values of 0.10 ns, 0.19 ns, and 0.60 ns, respectively. The accuracy and availability of the two PPP services exhibit the same levels, with centimeter-level accuracy achieved after convergence and positioning availability exceeding 99%. Therefore, the difference between the two services in application areas depends on the acquisition of augmentation information. However, BDSBAS, which concentrates on code observations, demonstrates lower accuracy in real-time orbit and clock offset, positioning accuracy, and positioning availability compared to the other two services. Its primary application is in the aviation and maritime domains, where there is a greater need for service integrity, continuity, and reliability.
Keywords:
real-time augmentation
; evaluation
; orbit and clock offset
; precise point positioning
1. Introduction
On April 1, 2013, the International GNSS Service (IGS) launched the IGS Real-Time Service (RTS), which provides real-time augmentation information, including real-time orbits and clock offset corrections for real-time precise point positioning (RT PPP) services [1]. Out of all the IGS Analysis Centers, the real-time augmentation information from the Centre National d’Études Spatiales (CNES) Analysis Center now exhibit the highest accuracy [2]. The RTS depends on internet infrastructure to deliver real-time augmentation information. Therefore, the application and development of RTS is restricted by the stability of internet infrastructure [25]. Additionally, since the official opening of the BeiDou Navigation Satellite System (BDS-3) on July 31, 2020, it has been developed rapidly and widely used. PPP-B2b service is a crucial element of BDS-3, and operates independently of internet infrastructure. PPP-B2b augmentation information are broadcast in real time via Geostationary Earth Orbit (GEO) satellites for customers in China and surrounding regions [3]. In addition, the BDS-3 has the BeiDou Satellite-Based Augmentation System (BDSBAS), which makes use of GEO satellites to give customers in China and the surrounding areas RT code correction data. It offers services to users in civil aviation, maritime, and other industries that demand high positioning accuracy, integrity, availability, and continuity, improves the accuracy and integrity of basic satellite navigation system [4,5,6].
RT PPP is an important branch of PPP that has wider application scenarios and greater value than post-PPP. Therefore, many scholars have researched the theory, methods, and applications of RT PPP. Wang et al. [7,8,9,10,11] compared and analyzed the real-time products of several analysis centers, and came to the unanimous conclusion that CNES had the best precision products, with the best Root Mean Square (RMS) of GPS orbit in each direction. The standard deviation (STD) of clock offset was less than 0.1 ns. The accuracy of GPS-only RT PPP in the east (E), north (N) and up (U) direction is about centimeter level, with the vertical direction accuracy being marginally worse than the horizontal direction. When compared with GPS-only solution, the performance of GPS/BDS-3 and GPS/BDS-2 combined positioning accuracy was slightly improved.
Numerous academics have examined and assessed PPP-B2b service in recent years. Song et al. [11,12,13,14] used PPP-B2b real-time service with various frequency combinations to assess the PPP positioning performance. Based on B1I/B3I and B1C/B2a frequency combinations, they came to the conclusion that the positioning performance could satisfy the needs of dynamic decimeter level service in China. Tao et al. [15,16,17,18,19,20,21,22,23,24,25,26] evaluated the performance of GPS/BDS-3 combination RT PPP as well as the performance of the PPP-B2b service. Their research indicate that the STD of the RT clock offset is around 0.05~0.18 ns, the radial accuracy of RT orbit is better than 10 cm. The BDS-3/GPS kinematic RT PPP positioning also arrived centimeter-level placement, its availability exceeds 70% in Asia, and over 80% in China.
BDSBAS plays a crucial role in the BDS-3. Several scholars have evaluated and studied BDSBAS dual-frequency augmentation service. For instance, Niu et al. [27,28] have examined GNSS integrity and augmentation theory and methods, analyzed the key technology of decimeter augmentation technology, and assessed its accuracy. Zhang et al. [29,30] evaluated the availability of BDSBAS signal frequency (SF) service, the results indicated its low availability, particularly at the boundary of the service area. Xin et al. [31,32,33] analyzed the performance of the Double-Frequency Multi-Constellation (DFMC) service of the BDSBAS. they came to the conclusion that the dual-frequency augmentation has significantly improved positioning accuracy. The BDSBAS SF service’s positioning accuracy was around 1.0 m in the horizontal direction and 2.0 m in the vertical direction (95%). For DFMC service, it was around 0.6 m and 1.2 m (95%), respectively. As indicated by the above, there is no systematic comparison between BDSBAS, PPPB2b, and IGS, nor any relevant elaboration on their applicable industries.
This contribution focuses on the comparison among CNES, PPP-B2b and BDSBAS real-time augmentation information. In Section 2, this paper will introduce the acquisition method of real-time augmentation information and the recovery method of real-time orbit and clock offset. It will comprehensively compare and analyze the three products, evaluating their orbit and clock offset accuracy. In Section 3, PPP performance and availability are analyzed. Section 4 analyze the application field. Finally, Section 5 presents this paper’s conclusions about the performance evaluation of three services.
2. Real-Time Augmentation Information Analyses
2.1. Real-Time Augmentation Information Acquisition
- (1)
- IGS real-time augmentation information.
Via the Ntrip communication protocol, real-time augmentation information released by IGS analysis centers can be obtained. Users can apply for a Caster account on the IGS official website (https://igs.org/rts/user-access) to obtain RTS data. In this contribution, RT augmentation information from CNES are used [10].
- (2)
- PPP-B2b real-time augmentation information.
PPP-B2b real-time augmentation information are transmitted through BDS-3 GEO satellites. Users can access PPP-B2b real-time services by using special receivers through B2b signals, then, by decoding the PPP-B2b signals, the real-time corrections can be obtained.
- (3)
- BDSBAS real-time augmentation information.
BDSBAS real-time service products are also broadcast through BDS-3 GEO satellites, which can be received by users through special receivers, that can decode B1C/B2a signal.
Unlike RTS services that rely on network transmission, the PPP-B2b and BDSBAS service products are limited to China and surrounding areas.
2.2. Real-Time Orbit and Clock Offset Recovery Method
2.2.1. Real-Time Orbit Recovery
- (1)
- IGS real-time orbit recovery
When recovering IGS real-time orbit, the Issue of Data (IOD) of orbit correction should be matched with that of broadcast ephemeris. For GPS satellites, its IOD can be obtained directly from broadcast ephemeris, while the IOD of BDS should be calculated as follows [35,36]:
where, is the IOD calculated by BDS, is the BDS clock offset reference time, which be obtain from BDS broadcast ephemeris, and is the remainder function.
Assuming that the is the broadcasting time of orbit correction message, in radial(R), Along-track(A) and Cross-track(C) directions, the satellites’ position and velocity corrections are (, , , , , ), is the time of signal transmit in satellite. At time , the corrections of satellite position are, and , respectively, which can be expressed as follows:
The satellite orbit corrections are converted from the satellite-fixed system to the Earth-Centered Earth-Fixed (ECEF) system, that can be expressed as follows:
Under ECEF, the corrections to satellite positions in the , , and directions, are represented by , and , correspondingly. The unit vector in the R, A, and C directions are represented by , and , respectively.
- (2)
- PPP-B2b real-time orbit recovery
Real-time orbit recovery for PPP-B2b service, multiple IOD should be correctly matched, including the IOD of state space representation (SSR) corrections (IODSSR); the IOD of satellite PRN mask (IODP); the IOD of orbit and clock offset correction (IODCorr); and the IOD of navigation (IODN). The detailed matching rules for PPP B2b products are as follows Table 1.
Since there are only satellite position corrections in the three components, i.e., R, A and C, at time , the satellite position corrections are , and respectively, which can be obtained from the following equations:
Then transform the coordinate datum according to equation 3.
- (3)
- BDSBAS real-time orbit recovery
Because BDSBAS orbit correction coordinate base for the WGS-84 coordinate system, the corrections in the , , and directions are , and , correspondingly, which can be obtained by formula (5).
2.2.2. Real-Time Clock Offset Recovery
- (1)
- IGS real-time clock offset recovery
At time , The IOD of clock offset correction should be matched with that of broadcast ephemeris, then coefficients , and are used to correct the IGS real-time clock offset. At time , The correction for satellite clock offset is represented by , which can be calculated by formula (6) [35,36]:
According to the principle of closest time and IOD matching, the matched broadcast ephemeris satellite clock offset is , and the corrected clock offset , at time , can be calculated by equation (7).
where, is the speed of light.
- (2)
- PPP-B2b real-time clock offset recovery
Only coefficient in PPP-B2b clock offset correction, which is a negative value. Thus, the satellite clock offset at time can be determined using the following equation:
- (3)
- BDSBAS real-time clock offset recovery
At time , the coefficients and are used to correct the BDSBAS RT clock offset , which can be calculated by equation (9).
2.3. Real-Time Product Quality Analysis
2.3.1. Real-Time Orbit Accuracy Analysis
To evaluate the accuracy of CNES, PPP-B2b, and BDSBAS orbit corrections, this paper compared the RT orbit, which recovered by augmentation information, with the final orbit product from Wuhan University Multi-GNSS (WUM). The satellite orbit accuracy is evaluated using R, A, and C from DOY091 to DOY096, 2023, and then the RMS value was calculated.
- (1)
- GPS orbit accuracy
Figure 1 displays the average RMS values for GPS satellite orbit accuracy of CNES, PPP-B2b, and BDSBAS over 6 days. It indicates that the GPS satellite orbit accuracy in R direction from CNES, which is better than 3.5 cm, it is superior than those of C and A component, and the accuracy of A component is the poorest among three directions. The average accuracy of GPS RT orbit from CNES, in R, A, and C directions, is 2.77 cm, 4.30 cm, and 3.72 cm, correspondingly. The RT orbit accuracy of PPP-B2b GPS satellites is poorer than CNES, especially for the A and C directions. This is because the PPP-B2b real-time augmentation information is estimated using a limited number of Chinese regional stations, resulting in a restricted number of observable GPS satellites [25]. Furthermore, BDSBAS relies on code correction, resulting in the worst orbit accuracy among three corrections. The accuracies for R, A, and C direction are 19.20 cm, 62.70 cm, and 57.08 cm, respectively. During DOY 091-096, only 18 GPS satellites corrections can be broadcast by BDSBAS, which is fewer than the number corrected by PPP-B2b (26) and CNES (32). This limitation is due to BDSBAS service correction base on L1/L5 frequency.
- (2)
- BDS-3 orbit accuracy
Figure 2 displays the average RMS of RT orbit for BDS-3 Medium Earth Orbit (MEO) satellites from CNES, PPP-B2b and BDSBAS over a period of 6 days. The average orbit accuracy in R, A and C component of BDS-3 MEO satellites for CNES are 4.59 cm, 7.06 cm and 6.39 cm, respectively. The accuracy of A and C component is marginally poorer than R component for PPP-B2b, which is at the centimeter level and almost always superior than 5 cm, that is marginally greater than that of CNES, while the A and C direction is not. The mean RMS of it are 2.97 cm, 10.05 cm, and 11.11 cm, respectively. The RT augmentation information of BDSBAS is based on code correction. Resulting in, the accuracy of BDSBAS BDS-3 MEO satellites’ orbit is considerably worse than CNES and PPP-B2b, which is 11.09 cm, 37.70 cm and 31.65 cm in R, A, and C direction, respectively.
The average RMS values for the BDS-3 Inclined Geosynchronous Satellite Orbit (IGSO) satellites orbit of CNES, PPP-B2b, and BDSBAS during a 6-day period are displayed in Figure 3. For R, A, and C component, the accuracy of the BDS-3 IGSO satellites’ orbit is 18.69 cm, 12.72 cm, and 12.42 cm for CNES, and 6.75 cm, 22.52 cm, and 19.92 cm for PPP-B2b, correspondingly. The orbit accuracy of BDS-3 IGSO satellites base on BDSBAS augmentation information is significantly poorer than CNES and PPP-B2b since it is dependent on code observations, which, in the R, A, and C direction, is 9.11 cm, 47.93 cm, and 45.34 cm, respectively.
In conclusion, for PPP-B2b, the BDS-3 satellites’ orbit accuracy is marginally superior to CNES in the R direction, particularly for the IGSO satellites. Nevertheless, it is inferior than CNES’s orbit accuracy in the A and C directions, particularly for GPS satellites. Furthermore, PPP-B2b satellites’ orbit accuracy is decimeter accurate in the A and C directions, which is significantly poorer than CNES, which could be as a result of there being fewer stations than CNES. CNES satellites’ orbit accuracy is capable of achieving centimeter-level precision in all directions, with the exception of BDS-3 IGSO satellites. Based mostly on code rectification, the corrected orbit accuracy of BDSBAS service is at the decimeter level, which is inferior to CNES and PPP-B2b, and the BDS-3 satellites’ orbit accuracy marginally higher than GPS [6].
2.3.2. Real-Time Clock Offset Accuracy Analysis
To assess the accuracy of RT clock offset from CNES, PPP-B2b, and BDSBAS, this paper compared it with the final clock offset products, which are provided by WUM. To eliminate the impact of the different datum on clock offset performance evaluation, this paper chose the double-difference method. Finally, the STD of double-difference clock offset series is calculated and used as the index for evaluating clock offset. For CNES, the virtual reference clock offset method is used to eliminate the influence of clock offset reference [27]. However, for PPP-B2b and BDSBAS products, this method cannot be adopted due to their discontinuous and inconsistent satellites for different epochs. The G09 and C39 with longer arc segments are selected as reference satellites to eliminate the influence of clock offset reference from DOY 092-096[28]. Because there is no C39 data in DOY 091 final clock offset products, C40 is used instead.
- (1)
- GPS clock offset accuracy
The STD of RT clock offset during a 6-day period for GPS satellites from CNES, PPP-B2b, and BDSBAS are displayed in Figure 4. For CNES, the STD of the various GPS satellites’ RT clock offset is comparable, which is 0.10 ns. Nevertheless, there are fewer clock offset of GPS satellite correction messages accessible as a result of PPP-B2b’s signal load constraint. The STD of GPS clock offset from PPP-B2b is 0.16 ns, and it is noticeably worse than CNES. The BDSBAS augmentation information is estimated based on code observations, that resulting in clock offset accuracy is significantly worse than CNES and PPP-B2b, which is 1.63 ns.
- (2)
- BDS-3 clock offset accuracy
The STD of the clock offset for CNES, PPP-B2b, and BDSBAS over a period of six days is shown in Figure 5. For CNES, BDS-3 MEO satellites have a clock offset accuracy of 0.19 ns, which is far greater than that of IGSO satellites, while the STD of IGSO satellites’ clock offset is 0.60 ns. For PPP-B2b, with a STD of roughly 0.16 ns, the clock offset accuracy of the BDS-3 MEO and IGSO satellites exhibits little variation. In general, PPP-B2b BDS-3 satellites have a little higher clock offset accuracy than CNES. BDSBAS clock offset is based on code observations, which makes it substantially less accurate than CNES and PPP-B2b. Its mean STD for the BDS-3 clock offset is 0.68 ns as well.
The aforementioned study leads to the conclusion that CNES GPS satellites have better real-time clock offset accuracy than PPP-B2b. However, the BDS-3 satellites’ clock offset accuracy from CNES is worse than that of PPP-B2b, particularly for IGSO satellites. Additionally, the clock offset accuracy of BDSBAS is the poorest among three clock offset products, but its real-time clock offset accuracy reaches a sub-nanosecond level.
3. Real-Time PPP Performance Evaluation
3.1. PPP Accuracy Analysis Based on Real-Time Augmentation Information
Six-days observation data from four international GNSS Monitoring and Assessment System (iGMAS) stations (bjf1, wuh1, sha1, and lha1) and two IGS stations (jfng, urum) during DOY 091-096 in 2023 are used to evaluate and analyze the RT PPP positioning accuracy of CNES, PPP-B2b, and BDSBAS RT augmentation information. The distribution of six stations is shown in Figure 6.
BDS-3-only, GPS-only, and GPS/BDS-3 dual-system dual-frequency static PPP experiments were conducted, respectively. The truth coordinates of iGMAS and IGS stations obtained from the snx file provided by the Product Integration and Service Center (ISC) and IGS, respectively. Since the satellite positions of CNES, PPP-B2b, and BDSBAS are based on satellite antenna phase center positions, there is no need for satellite antenna phase correction. Rather, the IGS analysis center’s igs20.atx file should be adopted for receiver antenna phase adjustment. While Timing Group Delay (TGD) adjustments are utilized by BDSBAS from broadcast ephemeris, Differential Code Bias (DCB) corrections are used by CNES and PPP-B2b DCB corrections in augmentation information [37]. More detailed processing strategies can be found from Table 2.
The 95th percentile value of RT PPP positioning errors is used as an index to express positioning accuracy. Figure 7 shows the positioning accuracy of GPS-only RT PPP for CNES, PPP-B2b, and BDSBAS services over 6 days. It is possible to draw the conclusion that CNES has positioning accuracy better than 17.5 cm, with positioning accuracy of 12.5 cm, 3.0 cm, and 10.5 cm in the E, N, and U directions, correspondingly. For PPP-B2b, the positioning accuracy is marginally worse than CNES, with E, N, and U directions positioning accuracy of 16.6 cm, 3.9 cm, and 12.9 cm, respectively. The positioning accuracy using BDSBAS service is significantly worse than CNES and PPP-B2b, which in E and N directions is 51.5 cm and 45.6 cm, correspondingly, and the worst precision in U direction for jfng station is 302.3 cm.
Figure 8 shows the RT PPP positioning accuracy for BDS-3-only solution based on CNES, PPP-B2b, and BDSBAS RT augmentation information during DOY091-096. For PPP-B2b, the positioning accuracy of BDS-3-only solution is better than 8.8 cm. In detail, the positioning accuracy, in the E, N, and U directions, is 3.4 cm, 2.6 cm and 6.6 cm, respectively. The positioning accuracy base on CNES products in all directions is less than 9.5 cm. Specifically, in the E, N, and U directions, it is 4.4 cm, 3.2 cm, and 8.8 cm, respectively. Overall, the positioning accuracy base on PPP-B2b RT augmentation information is marginally superior than that of CNES. In addition, the positioning accuracy base on BDSBAS real-time augmentation information is noticeably worse than those of CNES and PPP-B2b, for E, N, and U component, which is 19.9 cm, 16.6 cm, and 60.4 cm, correspondingly.
Based on CNES, PPP-B2b, and BDSBAS services, Figure 9 displays the positioning accuracy of GPS/BDS-3 combined solution during DOY091-096. The RT PPP positioning accuracy of CNES RTS is better than 8.6 cm, except for the U direction at lha1 and sha1 stations, it is within 5.0 cm in all directions. Overall, the GPS/BDS-3 combined positioning accuracy based on PPP-B2b service is marginally poorer than CNES, but both of them are better than 8.3 cm. For BDSBAS, the positioning accuracy, in the E, N, and U directions, is 22.3 cm, 23.6 cm, and 92.6 cm, correspondingly, which is significantly inferior to that of CNES and PPP-B2b.
In summary, the PPP performance for BDS-3-only solution based on PPP-B2b service is marginally better than CNES, while GPS-only and GPS/BDS-3 dual systems perform slightly worse than CNES products. The RT PPP accuracy of BDS-3-only and GPS/BDS-3 dual systems based on BDSBAS RT augmentation information is at the decimeter level, with noticeably better horizontal accuracy than vertical accuracy. The accuracy of a GPS-only system based on BDSBAS services is poor, particularly in the U direction where it can be poorer than 3 meters, that mainly due to an insufficient number of correctable satellites.
3.2. Positioning Availability Analysis Based on Real-Time Augmentation Information
The empirical availability rate (EAR) is used to evaluate RT PPP positioning availability of CNES, PPP-B2b, and BDSBAS real-time products, which is determined if the epoch can be used for RT PPP [38,39]. EAR formula is as follows:
In this paper, the positioning results of 4 iGMAS stations, i.e., bjf1, wuh1, sha1 and lha1 and 2 IGS stations: jfng and urum for 6 consecutive days from DOY091 to 096 in 2023 are evaluated to analyze the positioning availability of three services. The details are shown in Figure 10. Except for bjf1 station, the positioning availability of GPS/BDS-3 combined solution based on CNES, PPP-B2b and BDSBAS service is larger than 99.5%. The positioning availability of GPS/BDS-3 combined and BDS-3-only solution based on CNES and PPP-B2b real-time augmentation information is similar, which are beyond 99%. The availability of GPS-only solution based on PPP-B2b and BDSBAS is poor. The average availability of PPP-B2b is about 90%, while it is worse for BDSBSA. This is due to the number of enhanced GPS satellites in BDSBAS is few. The positioning availability of GPS-only, BDS-3-only, and GPS/BDS-3 combined solution of CNES real-time products are very similar. For PPP-B2b and BDSBAS, the GPS/BDS-3 combined solution is superior to the BDS-3-only solution and GPS-only solution.
4. Application Field Analysis
Table 3 presents the details of CNES, PPP-B2b, and BDSBAS in terms of broadcasting modes, service areas, tracking station networks, and space-time references [33]. As most industries lack unified standards for user terminal navigation and positioning requirements, this paper refers to relevant resources and statistics to outline the user terminal navigation and positioning requirements of major industries.
According to the analysis of RT PPP performance and availability in Section 3, CNES real-time product is mainly applicable to industries with global network coverage, such as environmental monitoring and inspection applications in environmental protection industry; agricultural automatic driving applications; railway vehicle regulation and automatic operation and maintenance inspection applications; highway operation and maintenance inspection and vehicle management applications; municipal bus dispatching and management applications; cultural tourism tourist guidance; PPP-B2b real-time augmentation information is mainly applicable to China and surrounding areas, especially Internet-restricted areas, and the specific application industry is generally the same as CNES real-time augmentation information. However, since it is not restricted by the Internet, it is also applicable to emergency search and rescue after disasters, navigation in deserts and mountains, etc.; For BDSBAS real-time augmentation information, its enhanced positioning accuracy is poor, but the integrity and continuity not listed in this paper have significant advantages, which are mainly used in aviation and navigation fields [34].
5. Conclusions
In this paper, several methods of real-time augmentation information acquisition and the RT orbit and RT clock offset recovery available in China are introduced, and the performance of CNES, PPP-B2b, and BDSBAS augmentation information is evaluated in terms of real-time orbit and clock offset accuracy, positioning accuracy, and positioning availability.
- (1)
- PPP-B2b and CNES RT orbit accuracy is consistent in radial direction, PPP-B2b GPS RT orbit accuracy is marginally poorer than CNES, BDS-3 orbit accuracy is slightly better than CNES, but within 5 cm. PPP-B2b RT orbit accuracy is worse than CNES in A and C direction, both are at decimeter-level. For CNES, except IGSO satellites, the orbit accuracy of other satellites is about centimeter level. BDSBAS real-time orbit accuracy is worse than CNES and PPP-B2b, which reached the decimeter-level.
- (2)
- The performance of CNES and PPP-B2b RT clock offset are consistent, CNES GPS RT clock offset accuracy is marginally higher than that of PPP-B2b, BDS-3 real-time clock offset accuracy is marginally inferior to that of PPP-B2b, especially for IGSO satellite. The BDSBAS RT clock offset accuracy is considerably inferior to that of CNES and PPP-B2b, but it has reached the sub-nanosecond level.
- (3)
- The RT PPP performance of BDS-3-only based on PPP-B2b service is marginally greater than CNES service, and that of GPS-only and GPS/BDS-3 dual systems is marginally worse than CNES, but it still reaches centimeter-level. The RT PPP performance of BDSBAS service is in decimeter level, except for the U component of GPS-only, which may be caused by the limited quantity of GPS satellites that can be corrected.
- (4)
- The RT PPP positioning accuracy and availability of GPS/BDS-3 and BDS-3-only are on par with CNES and PPP-B2b services. The acquisition of RT augmentation information is where the two services’ applications diverge most. CNES RT service rely on unobstructed network environment, while PPP-B2b only serves China and surrounding areas. For BDSBAS RT services, its positioning integrity and continuity have significant advantages, mainly applied in aviation and maritime fields.
References
- Wang, L.; Yue, F.; Miao, C. GPS/GLONASS /GALILEO Real-time service (RTS) product performance evaluation analysis. Navigation Positioning and Timing 2020, 7, 65–72. [Google Scholar]
- Wang, Z.Y.; Li, Z.S.; Wang, L.; et al. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. International Journal of Geo-Information 2018, 7, 85. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal in Space Interface Control Document Precise Point Positioning Service Signal PPP-B2b (Version 1.0). http://www.beidou.gov.cn/xt/gfxz/202008/P020230516574071340728.pdf. (accessed on 11 October 2023).
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal in Space Interface Control Document Satellite Based Augmentation System Service Signal BDSBAS-B1C (Version 1.0). http://www.beidou.gov.cn/xt/gfxz/202008/ P020200803362065480963.pdf. (accessed on 11 October 2023).
- IWG. SBAS L5 DFMC Interface Control Document (SBAS L5 DFMC ICD) (version 3). http://www.esa.int.
- China Satellite Navigation Office. Interface specification for signal in space of BeiDou satellite-based augmentation system -Dual-frequency augmentation service signal BDSBAS-B2a. http://www.beidou.gov.cn/yw/xwzx/202212/W020221231 599398885146.pdf. (accessed on 11 October 2023).
- Zhao, S.; Yang, Li.; Gao, Y. Analysis of GPS real-time precision single-point positioning performance based on SSR information. Geodesy and Geodynamics 2019, 39, 952–955. [Google Scholar]
- Zhang, L.; Yang, H.Z.; Gao, Y.; et al. Evaluation and Analysis of Real-time Precise Orbits and Clocks Products from Different IGS Analysis Centers. Advances in Space Research 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.C.; Yuan, Y.B.; et al. Real-Time Precise Point Positioning (RTPPP) with Raw Observations and Its Application in Real-time Regional Ionospheric VTEC Modeling. Journal of Geodesy 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS Int. J. Geo-Inf 2018, 7, 85. [Google Scholar] [CrossRef]
- Li, M.; Huang, G.; Wang, L.; Xie, W. BDS/GPS/Galileo Precise Point Positioning Performance Analysis of Android Smartphones Based on Real-Time Stream Data. Remote Sens. 2023, 15, 2983. [Google Scholar] [CrossRef]
- Lu, X.C.; Chen, L.; Nan, S.; et al. Decoding PPP Corrections from BDS B2b Signals Using a Software-defined Receiver: An Initial Performance Evaluation. Sensors Journal 2021, 21, 7871–7883. [Google Scholar] [CrossRef]
- Huang, L.W.; Meng, X.W. Accuracy Analysis of Precise Point Positioning Using BDS-3 PPP-B2b Signals. Journal of Geodesy and Geodynamics 2021, 41, 516–519. [Google Scholar]
- Song, W.W.; Zhao, X.K.; Lou, Y.D.; et al. Performance Evaluation of BDS-3 PPP-B2b Service. Geomatics and Information Science of Wuhan University 2023, 48, 408–415. [Google Scholar]
- Tao, J.; Liu, J.; Hu, Z.; et al. Initial Assessment of the BDS-3 PPP-B2b RTS Compared with the CNES RTS. GPS Solutions 2021, 25, 131. [Google Scholar] [CrossRef]
- Ren, Z.; Gong, H.; Peng, J.; et al. Performance Assessment of Real-Time Precise Point Positioning Using BDS PPP-B2b Service Signal. Advances in Space Research 2021, 68, 3242–3254. [Google Scholar] [CrossRef]
- Nie, Z.; Xu, X.; Wang, Z.; Du, J. Initial Assessment of BDS PPP-B2b Service: Precision of Orbit and Clock Corrections, and PPP Performance. Remote Sens. 2021, 13, 2050. [Google Scholar] [CrossRef]
- Guo, F.; Zhou, C.; Wu, Z.H. BDS-3 PPP-B2b signal accuracy and precision single-point positioning performance evaluation. Journal of Nanjing University of Information Science Technology (Natural Science Edition) 2022, 14, 658–666. [Google Scholar]
- Zhong, S.Z.; Zhang, Z.Y.; Chen, G.; et al. Beidou-3 system PPP-B2b space signal performance evaluation. Hydrographic Surveying and Charting 2023, 43, 49–52. [Google Scholar]
- Xu, Y. , Yang, Y. Li, J. Performance evaluation of BDS-3 PPP-B2b precise point positioning service. GPS Solut 2021, 25, 142. [Google Scholar] [CrossRef]
- Tang, J.; Lyu, D.; Zeng, F.; Ge, Y.; Zhang, R. Comprehensive Analysis of PPP-B2b Service and Its Impact on BDS-3/GPS Real-Time PPP Time Transfer. Remote Sens. 2022, 14, 5366. [Google Scholar] [CrossRef]
- Tang, C., Hu, X., Chen, J. et al. Orbit determination, clock estimation and performance evaluation of BDS-3 PPP-B2b service. J Geod 2022, 96, 60. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, C.; Zhang, M. Comprehensive Analyses of PPP-B2b Performance in China and Surrounding Areas. Remote Sens. 2022, 14, 643. [Google Scholar] [CrossRef]
- Geng, T. Li, Z.Q.; et al. Real-time Ocean precise point positioning with BDS-3 service signal PPP-B2b. Measurement 2022, 203. [Google Scholar] [CrossRef]
- Lan, R.; Yang, C.; Zheng, Y.; Xu, Q.; Lv, J.; Gao, Z. Evaluation of BDS-3 B1C/B2b Single/Dual-Frequency PPP Using PPP-B2b and RTS SSR Products in Both Static and Dynamic Applications. Remote Sens. 2022, 14, 5835. [Google Scholar] [CrossRef]
- Cai, Z.R. Accuracy evaluation of BeiDou-3 PPP-B2b signal. GNSS World of China 2023, 48, 64–70. [Google Scholar]
- Niu, F. Theory and Technique on GNSS Integrity Augment. D.E. Thesis, PLA Information Engineering university, Zhengzhou, China, 2008. [Google Scholar]
- Cai, H.L.; Meng, Y.N.; Geng, C.J.; et al. BDS-3 performance assessment: PNT, SBAS, PPP, SMC and SAR. Acta Geodaetica et Cartographica Sinica 2021, 50, 427–435. [Google Scholar]
- Chen, J.P.; Hu, Y.F.; Zhang, Y.Z.; et al. Preliminary evaluation of performance improvement of Beidou satellite-based augmentation system. Journal of Tongji University (Natural Science) 2017, 45, 1075–1082. [Google Scholar] [CrossRef]
- Zhang, J.; Shao, B. Regional Single Frequency Service Availability Evaluation of BDSBAS. Navigation Positioning and Timing 2021, 8, 137–145. [Google Scholar]
- Xin, J.; Chen, Q.; Guo, R.; et al. Basic navigation message parameters comparison between BDS-2 and BDS-3. Science of Surveying and Mapping 2020, 45, 32–38. [Google Scholar]
- Cao, Y.; Chen, J.; Liu, L.; Hu, X.; Liu, Y.; Xin, J.; Zhao, L.; Tian, Q.; Zhou, S.; Wu, B. Development Status and Service Performance Preliminary Analysis for BDSBAS. Remote Sens. 2022, 14, 4314. [Google Scholar] [CrossRef]
- Yang, Y.X.; Ding, Q.; Gao, W.G.; et al. Principle and performance of BDSBAS and PPP-B2b of BDS-3. Satell Navig 2022, 3, 5. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. 10 Application Scenarios of BDS in Africa. http://www.beidou.gov.cn/xt/gfxz/202008/ P020211105587887134672.pdf. (accessed on 11 October 2023).
- Yao, Y.; He, Y.; Yi, W.; et al. Method for evaluating real-time GNSS satellite clock products. GPS Solutions 2017, 21, 1417–1425. [Google Scholar] [CrossRef]
- Yue, F. Research on GPS/BDS-3 Precise Point Positioning Technology Based on Real-time Enhanced Information. M.E. Thesis, Chang’an University, Xi’an, China, 2022. [Google Scholar]
- Yuan, H.J.; Zhang, Z.T.; He, X.F.; et al. Stability Analysis of BDS-3 Satellite Differential Code Bias and Its Impacts on Single Point Positioning. Geomatics and Information Science of Wuhan University 2023, 48, 425–432. [Google Scholar]
- Ding, H.; Sun, F.P.; et al. Performance Analysis of Multi-GNSS Precise Point Positioning. Journal of Geomatics Science and Technology 2016, 33, 21–26. [Google Scholar]
- Li, X.X; Ge, M.R. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J Geod 2015, 89, 607–635. [Google Scholar] [CrossRef]
Figure 1.
Average RMS of GPS satellite orbit accuracy.
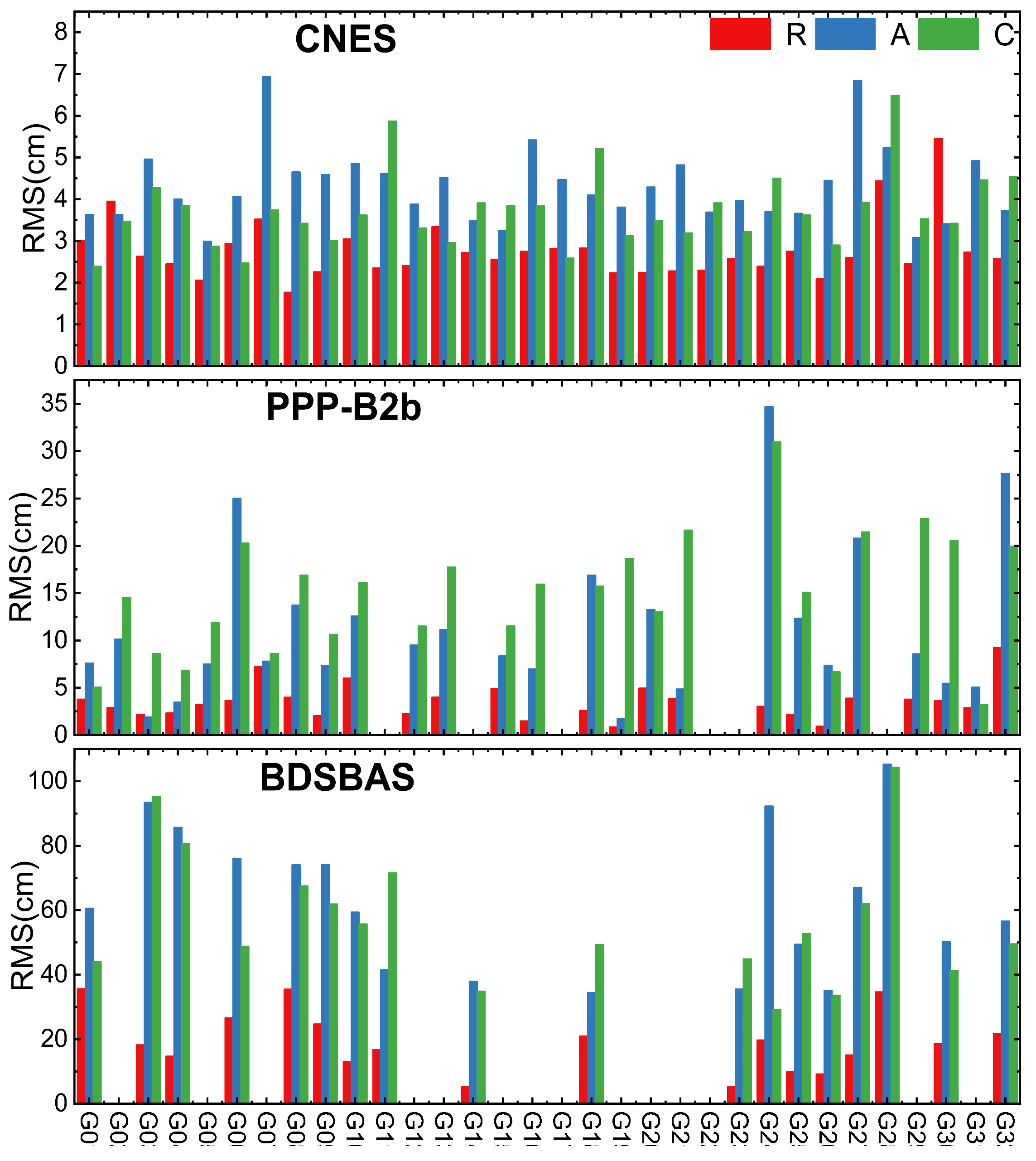
Figure 2.
Average RMS of BDS-3 MEO satellite orbit accuracy.
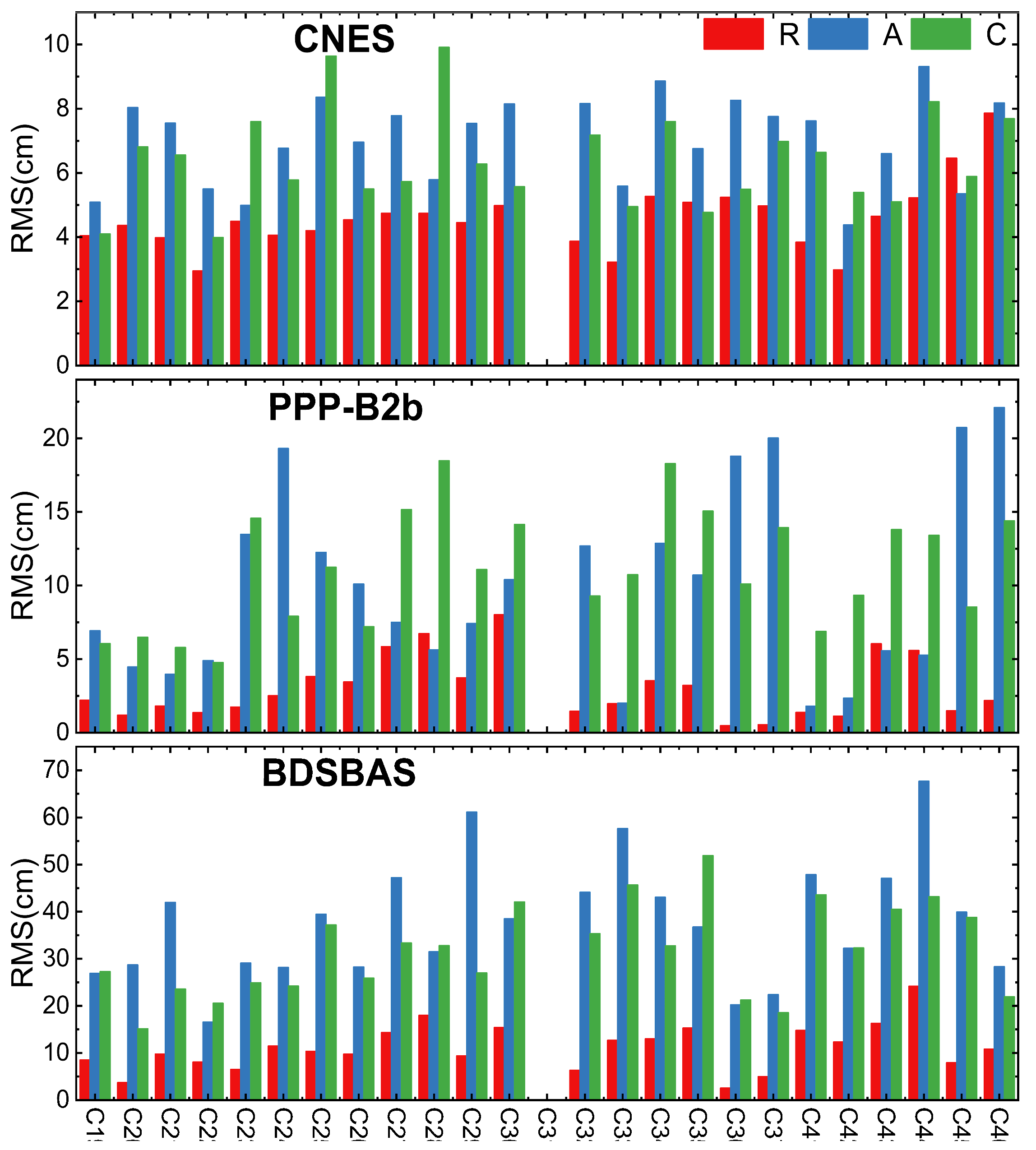
Figure 3.
Average RMS of BDS-3 IGSO satellite orbit accuracy.
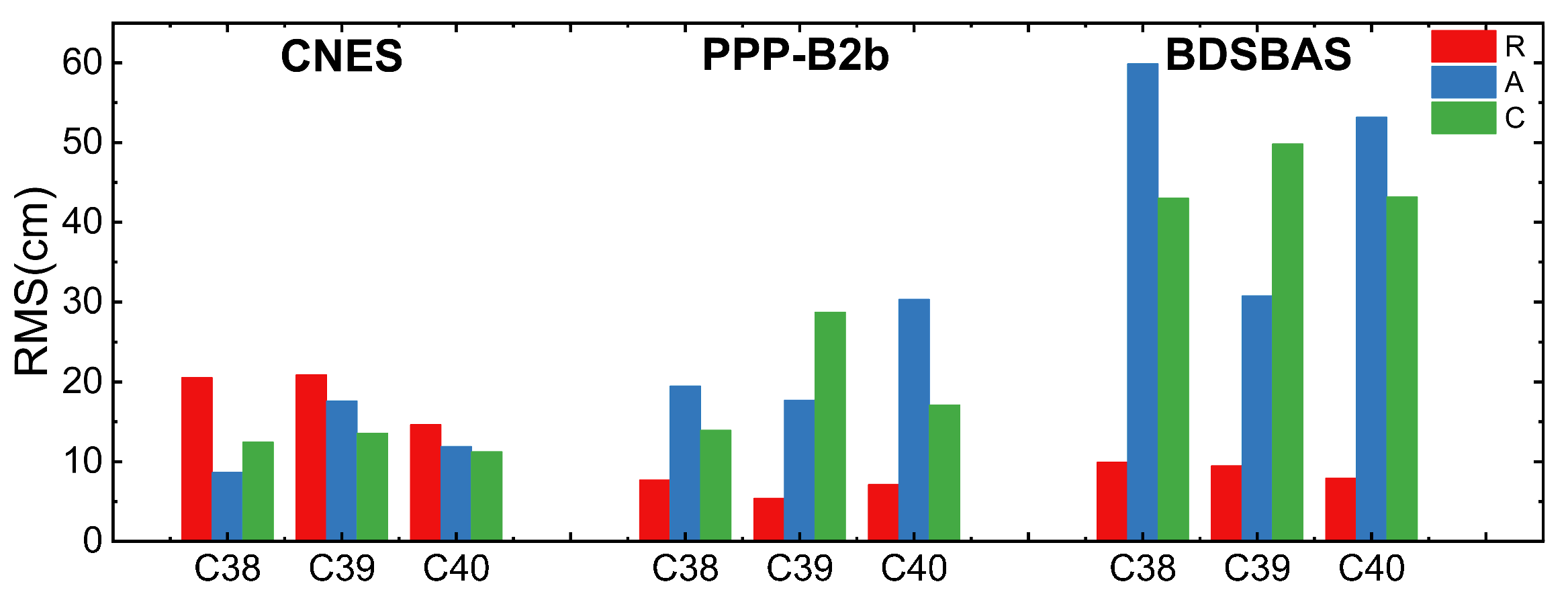
Figure 4.
Average STD of GPS satellite clock offset accuracy.
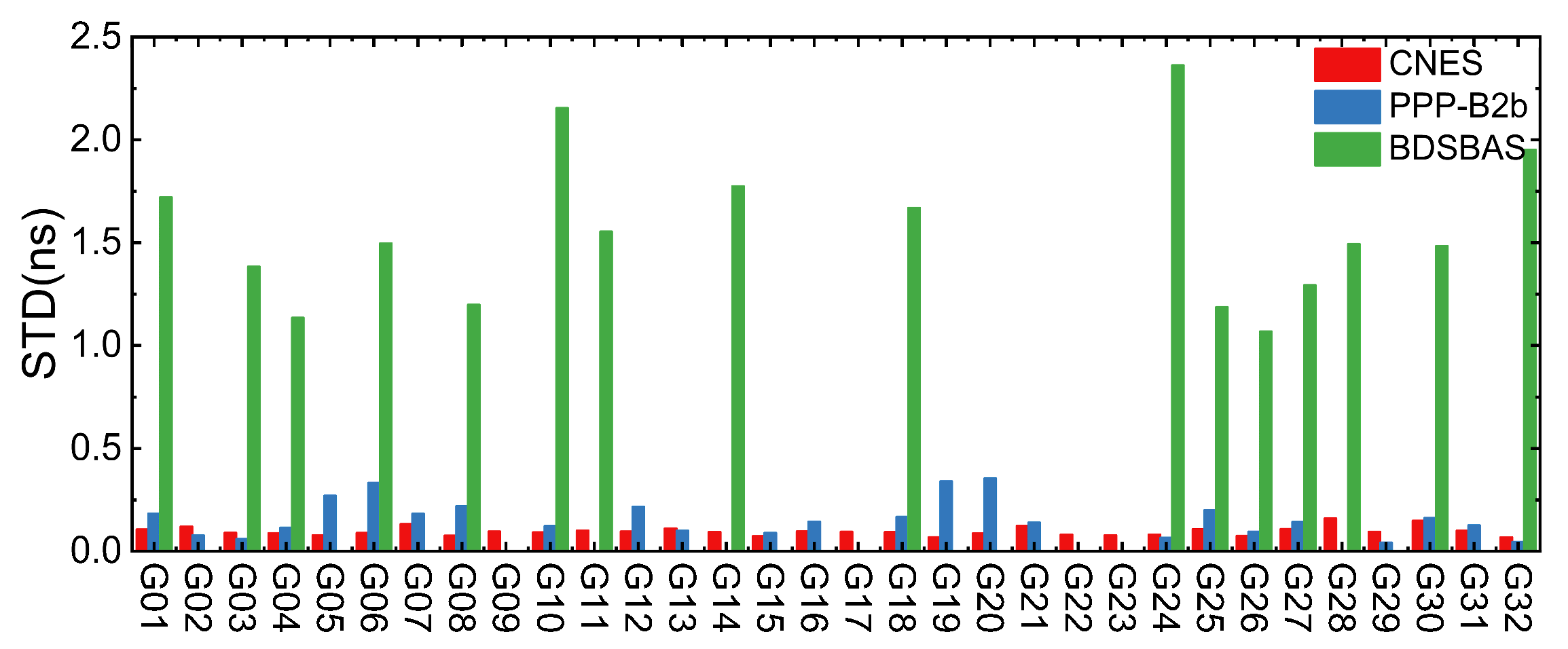
Figure 5.
Average STD of BDS-3 satellite clock offset accuracy.
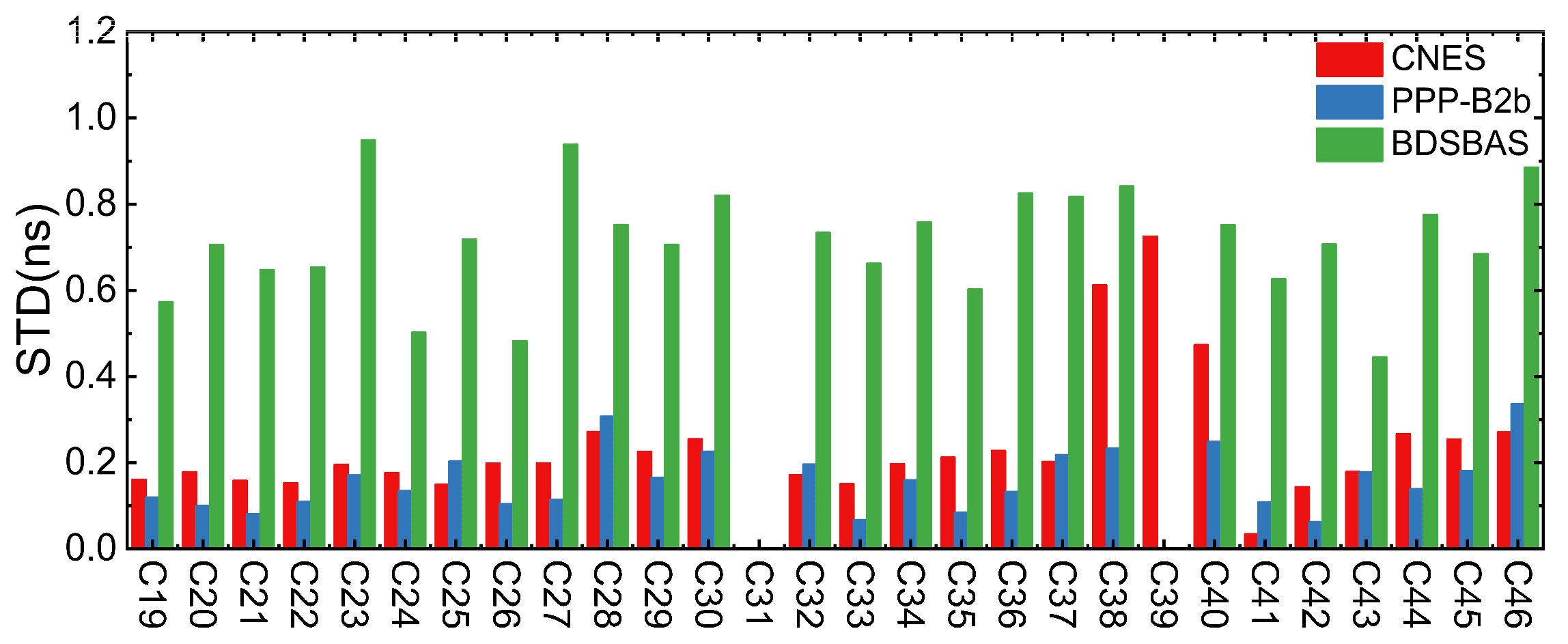
Figure 6.
Distribution of the six stations for RT PPP experiments.
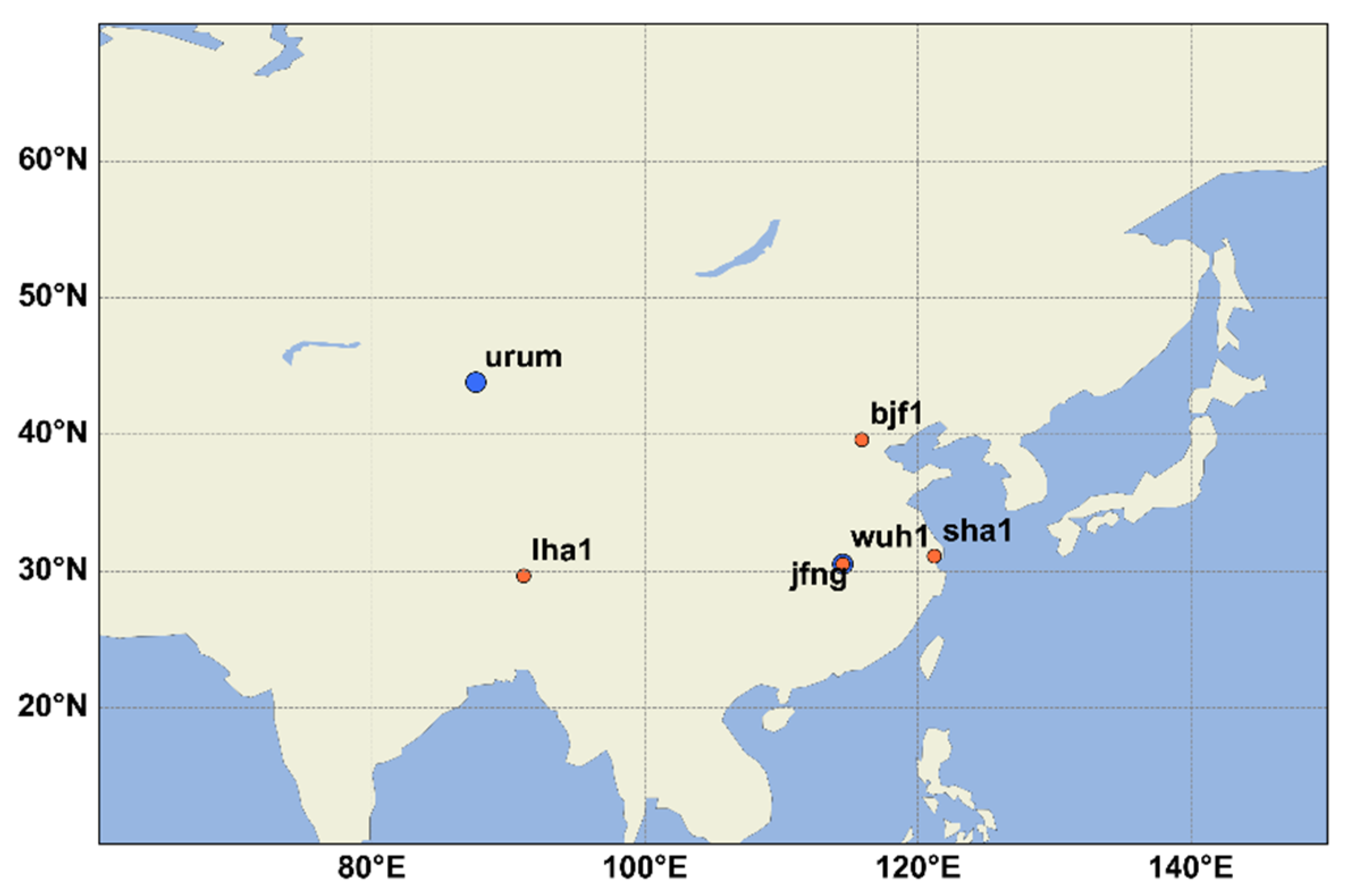
Figure 7.
Positioning accuracy of GPS based on different augmentation information.
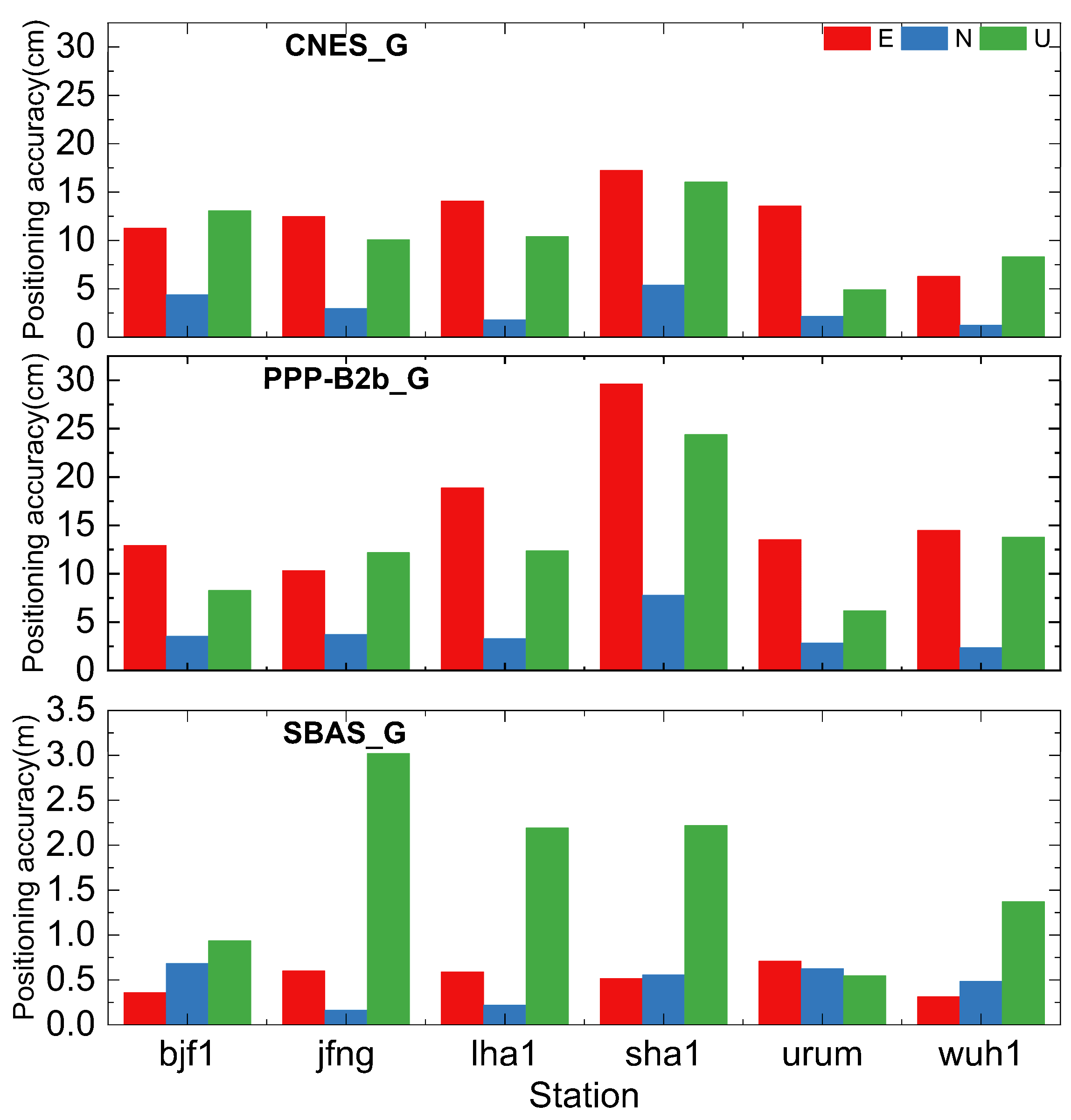
Figure 8.
Positioning accuracy of BDS-3 based on different augmentation information.
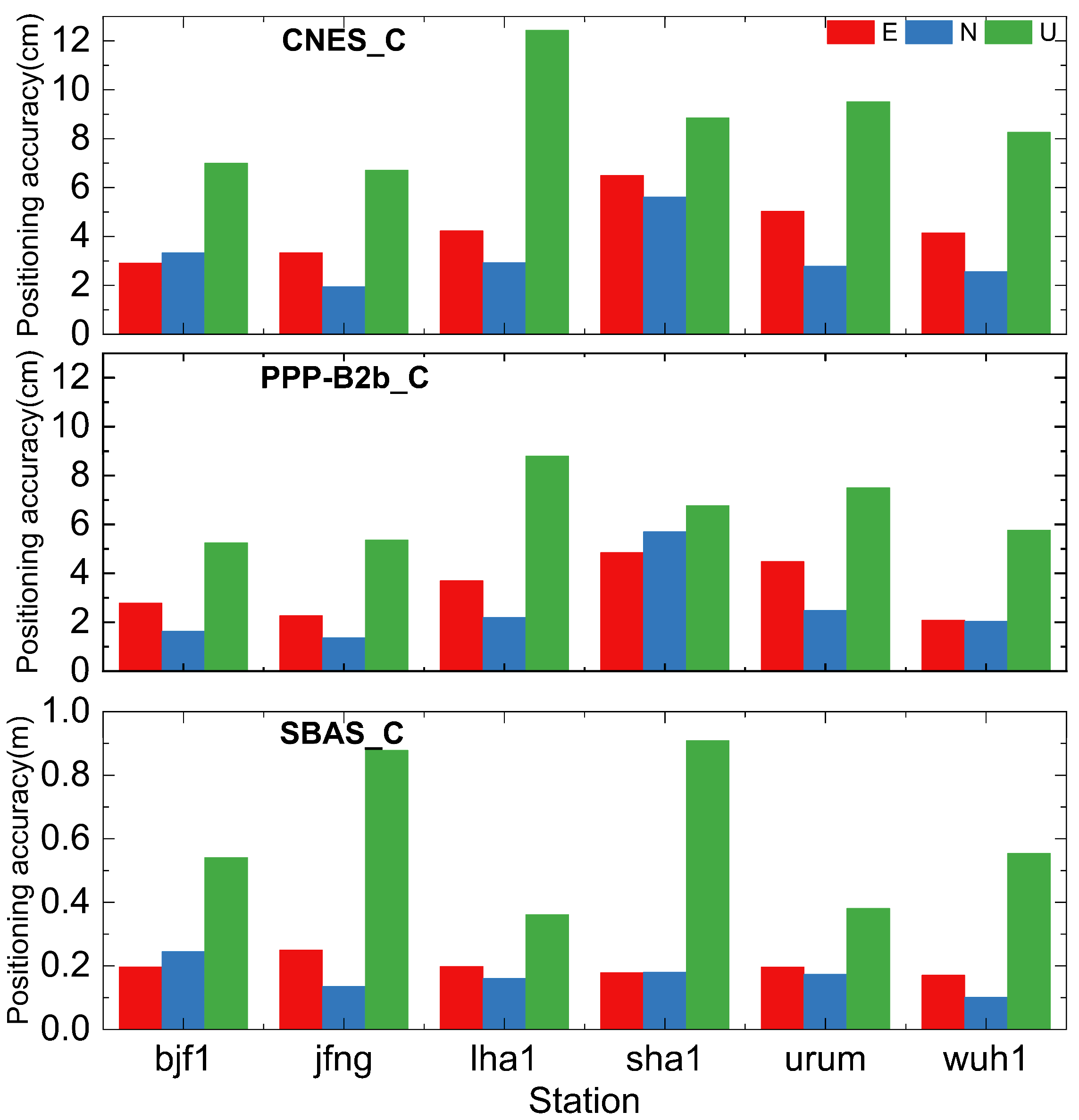
Figure 9.
Positioning accuracy of GPS/BDS-3 based on different augmentation information.
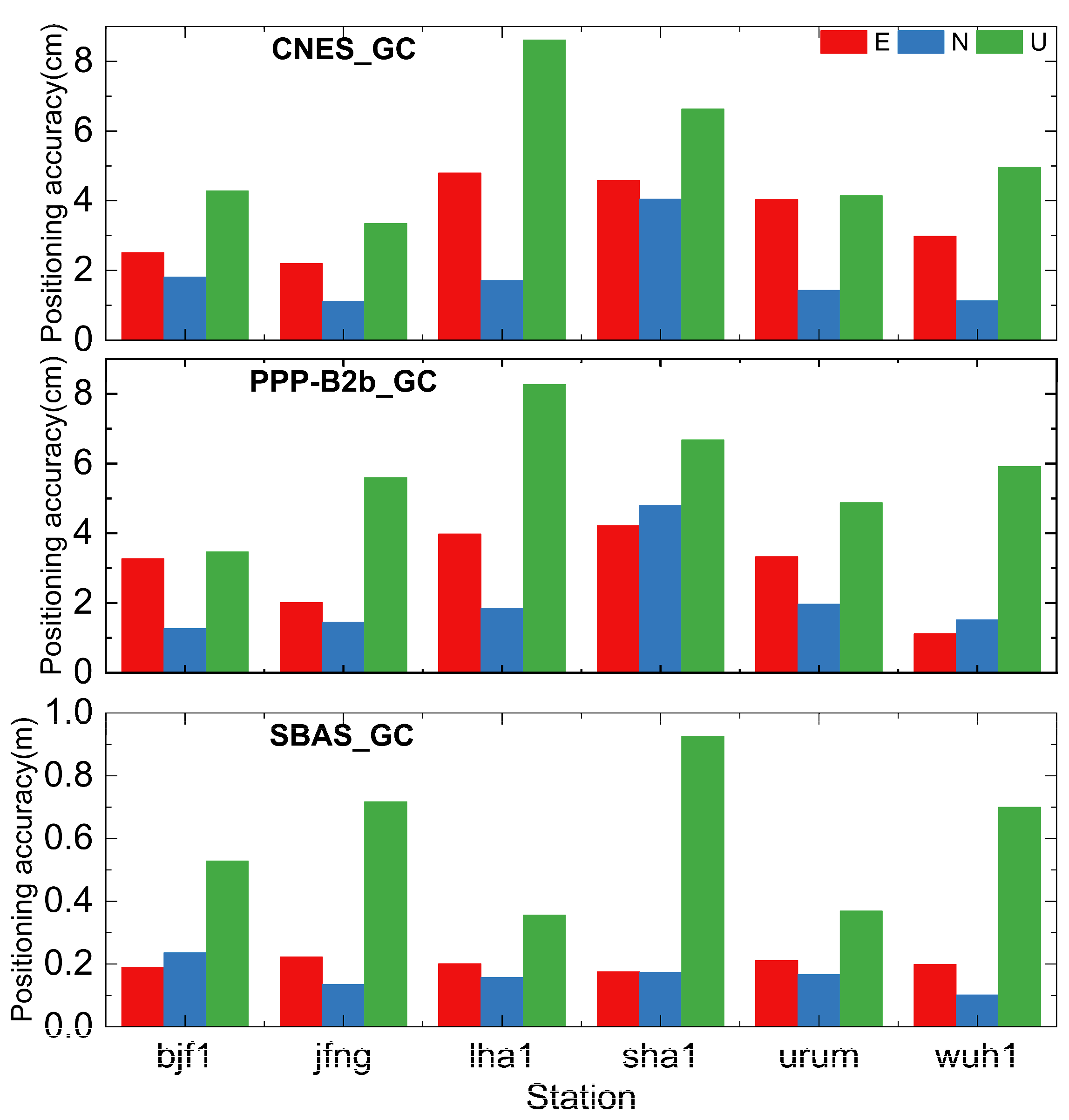
Figure 10.
Positioning availability based on different augmentation information.
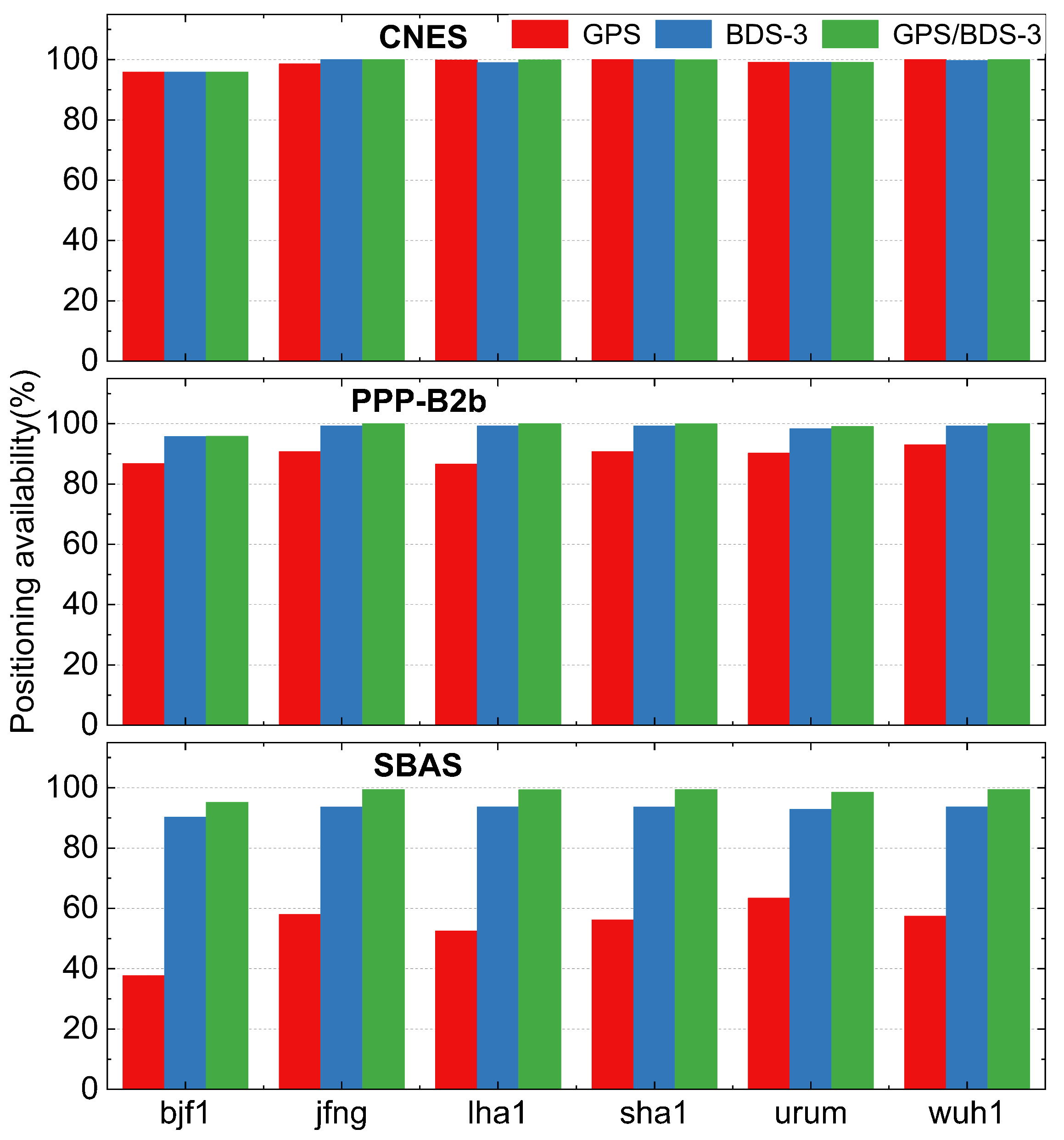

Table 1.
Detailed matching rules for PPP-B2b products.
| IOD Type | Message Type |
| IODSSR | 1, 2, 3, and 4 |
| IODP | 1 and 4 |
| IODCorr | 2 and 4 |
| IODN | 2 and broadcast ephemeris |
Table 2.
Processing strategies for real-time dual-frequency PPP.
| Project | Processing strategies |
| Solution type | Dual-frequency static PPP (GPS (L1+L2)/BDS-3 (B1I+B3I)) |
| estimator | Kalman filter |
| Observations | Carrier phase and code observation |
| Sample | 30s |
| Cut-off angle | 10o |
| stochastic model | elevation angle weighting model |
| ionospheric delay | Ionospheric-free combination |
| Tropospheric delay | dry component: SAAS+GMF model [36] |
| Wet component: random walk estimation | |
| relativistic effect | model correction [36] |
| Receiver antenna phase center | igs20.atx file correction (BDS-3 replaced by PCO of GPS) |
| phase windup | model correction [36] |
| Satellite orbit/clock offset | CNES, PPP-B2b and BDSBAS products |
Table 3.
The basic information of CNES, PPP-B2b and BDSBAS.
| Augmentation Information Source | Broadcast Method | Service Area | Tracking Station Network | Spatial-temporal Reference |
| CNES RTS | Internet | Global | Global | WGS84/GPST |
| PPP-B2b | GEO satellites | China and surrounding regions | Regional + inter-satellite links | BDCS/BDT |
| BDSBAS | GEO satellites | China and surrounding regions | Regional | WGS84/BDT |
Table 4.
The main industry user-side navigation and positioning requirements.
| Category | Application | Accuracy (RMS) | Coverage Area | Availability |
| Environmental Protection | Environmental Monitoring, Inspection | 0.5-2m | Protected Areas | 95% |
| Agriculture | Agricultural Machinery Autonomous Driving | 0.1m | Cultivated Areas | 99% |
| Railways | Vehicle Control, Automatic Maintenance Inspection | 0.1m | Railway Lines | 99.5% |
| Highways | Maintenance Inspection, Vehicle Management | 0.1m | Highways | 99.5% |
| Emergency Rescue | Emergency Communication | 0.1m | Production Areas | 98% |
| Municipal | Bus Dispatch and Management | 0.5m | Urban Areas | 98% |
| Tourism | Tourist Guidance | 1.0m | Scenic Areas | 95% |
| Surveying and Mapping | Surveying, Engineering Measurement | 0.02m | Entire Area | 98% |
| Aviation | Aircraft Landing Guidance, Route Planning | 4m | Airport Areas | 99% |
| Maritime | Ship Entry and Exit Guidance, Route Planning | 10m | Port Areas | 99% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



