Submitted:
21 February 2024
Posted:
22 February 2024
You are already at the latest version
Abstract
This paper considers the Hermitian solutions of a new system of commutative quaternion matrix equations, we establish both necessary and sufficient conditions for the existence of solutions. Furthermore, we derive an explicit general expression when it is solvable. To illustrate our main findings, we present two numerical algorithms and examples in this paper.
Keywords:
Commutative quaternion algebra
; Matrix equations
; Hermitian matrix
; Complex representation
MSC: 15A09; 15A24; 15B33; 15B57
1. Introduction
In 1843, Hamilton introduced the concept of real quaternions which are defined by [1]
which is a four-dimensional noncommutative associative algebra over real number field. Quaternions have been used in many areas such as statistic of quaternion random signals [2], color image processing [3] and face recognition [4]. Real quaternions are an extension of the complex numbers. However, the multiplication of the real quaternions is non-commutative which causes many difficulties.
A commutative quaternion, which was introduced by Segre [5] in 1892, is in the form of , where belong to the real number field, and the imaginary identities satisfy . The most prominent feature of a commutative quaternion is the satisfaction of the multiplication commutative rule. The collection of commutative quaternions comprises a four-dimensional Clifford algebra, forming a ring. Within this set, we can find noteworthy attributes such as nontrivial idempotents, zero divisors, and nilpotent elements. There are many applications of the commutative quaternion algebra in Hopfield neural netwoks, digital signal, image processing [6,7,8,9,10], and so on. Commutative quaternions are also extensively researched. Ksal et al. [11] gave complex representations of commutative quaternion matrices and discussed several related properties. In [12], Ksal et al. proposed the real representation of a commutative quaternion matrix, and derived some explicit expression of the solutions of the commutative quaternion matrix equations and , which are called the Kalman-Yakubovich-conjugate matrix equations, by means of real representation of a commutative quaternion matrix. Based on this, Ksal et al. [13] gave an expression of the general solution to the matrix equation over the commutative quaternion ring.
Hermitian matrix has drawn a lot of attentions due to its great importance. In [14], Yu et al. studied Hermitian solutions to the generalizaed quaternion matrix equation through the real representation method. Yuan et al. [15] discussed Hermitian solutions to the split quaternion matrix equation by using the complex representation method. In [24], Kyrchei obtained the determinantal representation formulas of -(-skew)-Hermitian solutions to the quaternion matrix equations and . As far as we know that the Sylvester matrix equations have a large number of applications in different fields. For example, the Sylvester matrix equation and the Sylvester-like matrix equation have been applied in singular system control [16], perturbation theory [17], sensitivity analysis [18] and control theory [19]. Wang et al. [20,21] considered the system of coupled Sylvester-like quaternion matrix equations. In [22], Wang et al. derived solvability conditions and expressions of the general solution to the system of two-sides coupled Sylvester-like quaternion matrix equations. Kyrchei [23] gave the determinantal representation formulas of solutions to the generalized Sylvester quaternion matrix equation .
Motivated by keeping interests in Hermitian solutions and applications of the system of commutative quaternion matrix equations, we in this paper intend to investigate the solvability conditions and the Hermitian solutions to the following system of commutative quaternion matrix equations
where are unknown Hermitian commutative quaternion matrices.
This paper is organized as follows. In Section 2, we review some useful properties and the structures of over the commutative quaternion algebra when X is a Hermitian commutative quaternion matrix. In Section 3, we derive some practical necessary and sufficient conditions for the existence of Hermitian solutions to the system (1) over , and the numerical examples are given in Section 4.
2. Preliminaries
Throughout this paper, let be the set of all real matrices, the set of all real symmetric matrices, the set of all real anti-symmetric matrices, the set of all complex matrices, the set of commutative quaternions, the set of n dimensional commutative quaternion column vectors, and the set of all commutative quaternion matrices, respectively. The symbol denotes the rank of A. Let the symbols stand for the identity matrix, the zero matrix with appropriate size, the transpose of A, and the Moore-Penrose inverse of a matrix A, respectively. and denote the conjugate matrix, the conjugate transpose matrix of A, respectively. We call is a Hermitian matrix if , and denote it by , where is the set of all Hermitian commutative quaternion matrices with the size of .
For any , A can be uniquely expressed as , where . It can also be uniquely expressed as , where .
Proposition 1.
Similarly, for any given , the complex representation matrix of A is
Obviously, is uniquely determined by A. It is straightforward to confirm that the following statements are valid.
Proposition 2.
[11]If , then
- (a)
- if and only if ,
- (b)
- ,
- (c)
- ,
- (d)
- .
Suppose and , the Kronecker product of A and B is defined as . Considering commutative quaternion matrices with appropriate dimensions, along with the real number p, we establish
The vec-operator of is defined as
To investigate the Hermitian solutions of a system of matrix equations (1) within the framework of the commutative quaternion algebra, we need to review some certain definitions and fundamental properties.
Assume that , then we have
where the symbol ≅ represents an equivalence relation. For a given matrix , the corresponding Frobenius norm is defined as follows:
According to the previously mentioned definition of Frobenius norm for complex matrices, we can define the Frobenius norm for commutative quaternion matrix as follows:
where then we have
Theorem 1.
[28]Let and . Then
- (a)
- if and only if ,
- (b)
- ,
- (c)
- ,
- (d)
- , if the matrices and are invertible,
- (e)
- .
For the purpose of deriving the Hermitian solutions of the system (1), we introduce some relevant definitions and conclusions.
Definition 1.
Definition 2.
Proposition 3.
[25]Suppose that , then
(1)
where the matrix is of the following form:
and is the ith column of the identity matrix of order n.
(2)
is described as (4) and the matrix is of the following form:
where is the column of the identity matrix of order n. It is apparent that .
Next, we explore the relationships between the Hermitian commutative quaternion matrices and symmetric matrices, as well as anti-symmetric matrices.
If , where , we can get
Apparently, is symmetric, and are antisymmetric. By means of Proposition 3, we have the following:
Theorem 2.
[29]Assume that , then we obtain
in which
Theorem 3.
[29]Suppose that and , where and . Then
Note that the results of is very important for figuring out the system of commutative quaternion matrix equations (1). Analogous methods and related conclusions can be found in [15]. By incorporating Theorem 3 with Theorem 2, we can gain the following outcome.
Theorem 4.
[29]If , , and , where , and . Consequently,
Lemma 1.
[26]The matrix equation , with and , has a solution if and only if
In this case, it has the general solution
where is an arbitrary vector, and it has the unique solution for the case when . The solution of the matrix equation with the least norm is .
3. The Hermitian solution to the system
In accordance with the above discussion, now we focus on solving the system (1), for ease of description, We firstly state the following notations.
Let and . We set
and
For further study the structure of Hermitian solution of the system of matrix equations (1), it is necessary to study the generalized inverse of matrix in the form of column blocks. The following notations are required. Let
From the findings [27] presented above, it can be inferred that
and
Taking into account the aforementioned results, we then turn our attention to the Hermitian solution of the system (1).
Theorem 5.
Let and . and ϵ are in the form of (Section 3) and (14), respectively. Then the system of commutative quaternion matrix equations (1) has a solution if and only if
In this case, the set of Hermitian solutions is as follows:
where y is an arbitrary vector of appropriate order. Then the system (1) has a unique solution if and only if
If this condition satisfies, then
Proof.
By virtue of Theorem 1 and Theorem 4 , we obtain
By Lemma 2, we conclude that the system (1) has a Hermitian solution if and only if (17) satisfy, thus we have
On account of
similarly, we can derive and , then we have
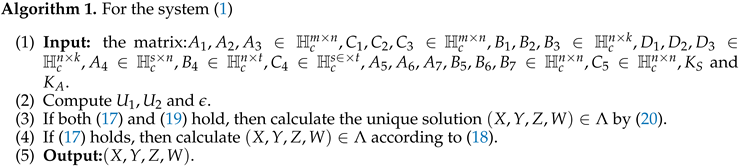
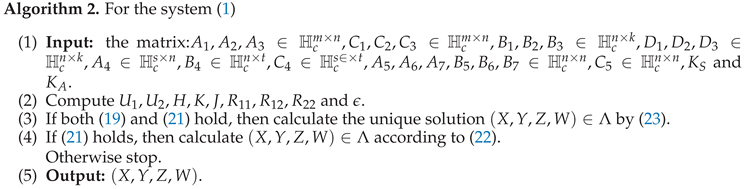
4. Numerical exemplification
In this section, on the basis of discussions in Section 2 and Section 3, we provide two algorithms for solving the system (1), and present two numerical examples to verify the feasibility of algorithms.
 |
 |
Example 1.
Let , and
where
We take
Let
From MATLAB and Algorithm 2, we can obtain
According to Algorithm 2, the system of matrix equations (1) has an unique solution , and we derive and .
Example 2.
Let , and
taking
From MATLAB and Algorithm 2, we obtain
According to Algorithm 2, the system (1) has infinite solutions . We can also obtain . Then the optimization problem
has an unique minimizer , it can also be expressed as
Therefore, we can get , and
5. Conclusion
In this paper, we have given the necessary and sufficient conditions for the existence of the Hermitian solutions to the system of commutative quaternion matrix equations (1), and also have established an expression of the Hermitian solutions to the system (1) when it is consistent. Some numerical algorithms and examples are provided to illustrate our results.
Author Contributions
Conceptualization, methodology, validation, writing—original draft—Y.Z.; funding acquisition—Q.-W. W.; discussion, writing-final draft—Q.-W.W., L.-M.X.,Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by grants from the National Natural Science Foundation of China (No. 12371023).
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hamilton, W.R. Lectures on quaternions; Hodges and Smith: Dublin, 1853. [Google Scholar]
- Took, C.C.; Mandic, D.P. Augmented second-order statistics of quaternion random signals. Signal Process. 2011, 91, 214–224. [Google Scholar] [CrossRef]
- Miao, J.; Kou, K.I. Color image recovery using low-rank quaternion matrix completion algorithm. IEEE Trans. Signal Process. 2021, 31, 190–201. [Google Scholar] [CrossRef]
- Jia, Z.G.; Ling, S.T.; Zhao, M.X. Color two-dimensional principal component analysis for face recognition based on quaternion model. Intelligent Computing Theories and Application: 13th International Conference, ICIC 2017, Liverpool, UK, 7-10 August, 2017; Volume 10361, pp. 177–189. [Google Scholar]
- Segre, C. The real representations of complex elements and extension to bicomplex systems. Math Ann 1892, 40, 413–467. [Google Scholar] [CrossRef]
- Catoni, F. Commutative (segre’s) quaternion fields and relation with maxwell equations. Adv Appl Clifford Al 2008, 18, 9–28. [Google Scholar] [CrossRef]
- Pei, S.; Chang, J.H.; Ding, J.J. Commutative reduced biquaternions and their fourier transform for signal and image processing applications. IEEE Trans. Signal Process. 2004, 52, 2012–2031. [Google Scholar] [CrossRef]
- Isokawa, T.; Nishimura, H.; Matsui, N. Commutative quaternion and multistate hopfield neural networks. The 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 14 October 2010; Volumn 2000, pp. 1–6. [Google Scholar]
- Kobayashi, M. Quaternionic hopfield neural networks with twin-multistate activation function. Neurocomputing 2017, 267, 304–310. [Google Scholar] [CrossRef]
- Guo, L.; Zhu, M.; Ge, X. Reduced biquaternion canonical transform, convolution and correlation. Signal Process 2011, 91, 2147–2153. [Google Scholar] [CrossRef]
- Kösal, H.; Tosun, M. Commutative quaternion matrices. Adv Appl Clifford Al 2014, 24, 769–779. [Google Scholar] [CrossRef]
- Kösal, H.; Akyiğit, M.; Tosun, M. Consimilarity of commutative quaternion matrices. Miskolc Math. Notes 2015, 16, 965–977. [Google Scholar] [CrossRef]
- Kösal, H.; Tosun, M. Universal similarity factorization equalities for commutative quaternions and their matrices. Linear Multilinear Algebra 2019, 67, 926–938. [Google Scholar] [CrossRef]
- Yu, C.E.; Liu, X.; Zhang, Y. The generalized quaternion matrix equation axb+cx*d=e. Math. Methods Appl. Sci. 2020, 43, 8506–8517. [Google Scholar] [CrossRef]
- Yuan, S.F.; Wang, Q.W.; Yu, Y.B.; Tian, Y. On hermitian solutions of the split quaternion matrix equation axb+cxd=e. Adv Appl Clifford Al 2017, 27, 3235–3252. [Google Scholar] [CrossRef]
- Shahzad, A.; Jones, B.; Kerrigan, E.; Constantinides, G. An efficient algorithm for the solution of a coupled sylvester equation appearing in descriptor systems. Automatica 2011, 47, 244–248. [Google Scholar] [CrossRef]
- Li, R.C. A bound on the solution to a structured sylvester equation with an application to relative perturbation theory. SIAM J. Matrix Anal. Appl. 1999, 21, 440–445. [Google Scholar] [CrossRef]
- Barraud, A.; Lesecq, S.; Christov, N. From sensitivity analysis to random floating point arithmetics - application to sylvester equations. In International Conference on Numerical Analysis and Its Applications; Springer: Berlin, Heidelberg, 2000; Volumn 1988, pp. 35–41. [Google Scholar]
- Castelan, E.; Silva, V.G. On the solution of a sylvester equation appearing in descriptor systems control theory. Syst Control Lett 2005, 54, 109–117. [Google Scholar] [CrossRef]
- He, Z.H.; Wang, Q.W. A system of periodic discrete-time coupled sylvester quaternion matrix equations. Algebra Colloq 2017, 24, 169–180. [Google Scholar] [CrossRef]
- He, Z.H.; Wang, Q.W.; Zhang, Y. A system of quaternary coupled sylvester-type real quaternion matrix equations. Automatica 2018, 87, 25–31. [Google Scholar] [CrossRef]
- Wang, Q.W.; He, Z.H.; Zhang, Y. Constrained two-sided coupled sylvester-type quaternion matrix equations. Automatica 2019, 101, 207–213. [Google Scholar] [CrossRef]
- Kyrchei, I. Cramer’s rules for Sylvester quaternion matrix equation and its special cases. Adv. Appl. Clifford Algebras 2018, 28, 1–26. [Google Scholar] [CrossRef]
- Kyrchei, I. Cramer’s Rules of ηη-(skew-) Hermitian solutions to the quaternion Sylvester-type matrix equations. Adv. Appl. Clifford Algebras 2019, 29, 1–31. [Google Scholar] [CrossRef]
- Yuan, S.F.; Wang, Q.W. L-structured quaternion matrices and quaternion linear matrix equations. Linear Multilinear Algebra 2016, 64, 321–339. [Google Scholar] [CrossRef]
- Ben-Israel, A.; Greville, T.N. Generalized inverses: theory and applications, 2nd ed.Springer Science & Business Media: New York, 2003. [Google Scholar]
- Magnus, J.R. L-structured matrices and linear matrix equations. Linear Multilinear Algebra 1983, 14, 67–88. [Google Scholar] [CrossRef]
- Xie, L.M.; Wang, Q.W. A system of matrix equations over the commutative quaternion ring. Filomat 2023, 37, 97–106. [Google Scholar] [CrossRef]
- Yuan, S.F.; Tian, Y.; Li, M.Z. On Hermitian solutions of the reduced biquaternion matrix equation (AXB,CXD)=(E,G). Linear Multilinear Algebra 2020, 68, 1355–1373. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



