
Submitted:
01 March 2024
Posted:
04 March 2024
You are already at the latest version
Abstract
Our starting point is the covariant coordinate transformation equation of a relativistic positioning system in Minkowski space-time, which maps the receiver’s emission coordinates (proper times broadcast by the emitters) to its coordinates in some inertial reference frame. Bancroft’s analytical (closed-form) solution to the basic pseudorange navigation equations with four emitters is recovered and the subjacent elements are geometrically interpreted. The case of four static beacons is analized as a clarifying situation.
Keywords:
Relativistic Positioning Systems
; pseudorange navigation equations
; Bancroft’s closed-form solution
1. Introduction
In the context of Global Navigation Satellite Systems (GNSS), a modern approach is that of relativistic positioning. The foundations of the theory of Relativistic Positioning Systems (RPS) were laid down some time ago, for a genesis and perspectives please refer to [1,2].
In any space-time, a RPS can be thought of as a set of four emitters A of world-lines , broadcasting their respective proper times by means of electromagnetic signals. In a RPS, the basic observable is the set of four proper times received at an event x by the user. These are the user’s emission coordinates (refer to [3] for a detailed analysis). The four space is called the grid of the positioning system. For generalities on this concept and RPS constructions in two and three dimensions see [4,5,6]. Similar constructions apply to locate an emitter from a given set of coplanar receivers [7,8].
The set of four emission events at the emission times received at the event x is known as the configuration of the emitters for the event x. Suppose the four world-lines are known in an inertial coordinate system . In Minkowski space-time, the location problem consists in finding the transformation between the user’s emission coordinates and its coordinates in that inertial coordinate system, by solving the following algebraic system of four non-linear equations (called the null propagation equations):
where x and are respectively the user and the emitters position four-vectors with respect to the origin O of . The solution to (1), mapping the user’s emission coordinates to its inertial coordinates, is what we may call the RPS coordinate transformation or the RPS solution [9,10].
In the traditional approach to GNSS, one of the basic observables is the pseudorange, which is the apparent range (distance) between the emitter and the user as inferred from the travelling time of the signal. Neglecting gravitational, atmospheric and instrumental effects, this apparent distance differs from the Euclidean geometric distance at the time of signal emission due to synchronisation errors between emitter and user clocks (clock biases or offsets). With at least four pseudorange measurements, the receiver can estimate its position and clock bias by solving the corresponding navigation equations. In practice, this estimation is the result of a multilateration problem which is solved by iterative methods (least squares algorithms) [11,12]. Analytical or closed-form solutions are usually brought in as an initial (approximate) estimation [13]. This work is concerned only with analytical solutions, leaving aside the treatment of any source of errors due to measurement uncertainties, for which further estimation and statistical analysis is necessary (see [8,14] for an analysis in the context of source localization).
The main purpose of this paper is to bring the (non-relativistic) theoretical foundations of current GNSSs closer to the RPS approach, by recovering from the RPS coordinate transformation equation [9,10] one of the classical solutions to the problem which is still in use today: Bancroft’s closed-form solution (with four emitters) [15]. Abel and Chaffee [16,17] used Lorentzian geometry in their interpretion of the Bancroft algorithm, providing conditions for the existence and unicity of solutions. Bancroft’s solution has been recently considered in [18,19]. However, Bancroft’s characteristic elements in terms of the RPS geometric ones have not been sufficiently interpreted up to now.
We begin by explaining the notation (Section 2), we then briefly review the RPS solution (Section 3) and express Bancroft’s solution using a relativistic notation (Section 4). Next, by choosing a specific value for the subsidiary vector , we recover Bancroft’s solution from the RPS solution (Section 5) and provide proofs of the results in Section 6. Section 7 contains a positioning example to illustrate the correspondence between both solutions for four static emitters, and Section 8 contains constructions of the characteristic regions for this static situation. Section 9 extends these constructions considering some of the satellites as receivers. Finally, we set out our conclusions in Section 10.
Some preliminary results of this work have been communicated at the congress Mathematical Modelling in Engineering and Human Behaviour 2023 [20].
2. Notation
The main sign conventions and notation adopted in this paper are:
(i) g is the Minkowski space-time metric, with signature . We use units in which the speed of light in vacuum is .
(ii) is the metric volume element of g, defined by , where stands for the Levi-Civita permutation symbol, . The Hodge dual operator associated to is denoted by an asterisk ∗. For instance, in index notation (where summing over repeated indices is understood), if are space-time vectors, one has
where ∧ stands for the wedge or exterior product (defined by the antisymmetrized tensor product of antisymmetric tensors).
(iii) denotes the interior or contracted product, that is, if x is a vector and T a covariant 2-tensor, one has (contracting the first left tensor index). If k is another space-time vector, then we have the following properties
(iv) In terms of matrices, a contravariant space-time vector is represented by a column and a covariant vector by a row. In index notation, the interior or contracted (or scalar) product of a column vector () and a row vector () is the contraction . A column vector () is converted into a row vector () with the metric: . A matrix M acts on a column vector x yielding another column vector and on a row vector y yielding another row vector .
3. The RPS Solution in Minkowski Space-Time
In this section we present a brief compendium of relativistic positioning in flat space-time. For more explanations and details please refer to [9,10].
As detailed in [9], the set of equations (1) can be conveniently solved by referring both the user’s position x and three of the emitters, say , to the fourth one, ,
and separating (1) into a quadratic equation
and a system of three linear equations
where are the world-function scalars associated with the three pairs of events () at emission times.
Here we consider only regular emitter configurations, that is, when the four emission events determine a 3-plane . According to [9], a regular emitter configuration is an emission/reception configuration iff all the relative emitter positions are space-like, that is,
These conditions express that the vectors defined by
are null (1) and are all future (past) oriented, . The bounds imposed by conditions (9) are called the shadows that the emitters produce to each other. The null vectors and become collinear () at the mutual shadows produced by and . The precise definition of the shadow that a world-line produces to another world-line was given in [21] (see also [22]).
Furthermore, is an emission (reception) configuration iff, in addition to (9), the null vector y is future (past) oriented. These conditions allow to interpret the solutions of the null propagations equations (1) as emission solutions.
The general solution to the underdetermined system (8) is of the form:
where is a particular solution to the system, is a real parameter and
the configuration vector of the RPS, which is orthogonal to the configuration 3-plane . A regular emitter configuration (at x) is said to be space-like, light-like or time-like if , or , respectively, at x. The regions defined by these conditions are respectively denoted as , and . In Section 8.1 and Section 8.2 we analysis these regions for the case of four static emitters.
The particular solution is found by bringing in a subsidiary vector such that (that is, transversal to the emitter configuration) and otherwise arbitrary:
where H is the configuration bivector,
with
Then is orthogonal to , . Quantities , H and are intrinsically related to the configuration of the emitters at x, and are independent of the origin of the inertial chart .
The general solution x to the null propagation equations (1) is obtained by introducing (10) in the main quadratic Equation (7),
and solving for . This prodcedure gives:
with
where
and is the orientation of the positioning system at the event x. The orientation is defined as the sign of the Jacobian determinant of the coordinate transformation from inertial to emission coordinates, that is
with . In [9] the orientation is expressed as and is determined by the configuration of the emitters as seen by the user, which is analysed in [10] in connection with the bifurcation problem as follows.
Depending on the causal character of the configuration vector and assuming the coordinate condition , we distinguish three situations (see Figure 3, Figure 4 and Figure Figure 5 in [10]):
- (i)
- If is time-like, there is only one emission solution P, the other () is a reception solution (the events P and are on opposite sides of the configuration hyperplane ). In this case, the sign of can be determined from the sole standard emission data .
- (ii)
- If is light-like, there is only one valid emission solution (the other solution is degenerate). The sign of can be determined from .
- (iii)
- If is space-like, there are two valid emission solutions: in order to determine the sign of , additional observational information is necessary (relative positions of emitters on the user’s celestial sphere).
In practical GPS applications, there is generally no bifurcation problem because the valid solution is always the one that is closest to the Earth radius. Nevertheless, bifurcation is inherent to any time-like emitter configuration and therefore acquires importance in positioning situations beyond the proximity of the Earth.
On the other hand, the sign of determines the causal character of the 2-plane generated by {}. It is negative when the plane is space-like, zero when light-like and positive when time-like. From (5) and (16), this plane is the same generated by {}. Since y is light-like, this 2-plane is non space-like and therefore . Moreover, . Consequently, the events where are those where the Jacobian determinant of vanishes (); these events form the border which separates two (the front and back) coordinate domains, where takes opposite values [10].
4. Bancroft’s Solution
As mentioned earlier, we aim to bring the traditional GNSS approach closer to the RPS formalism. In this section we express Bancroft’s solution using the RPS notation. In fact, Bancroft’s solution, despite being based on non-relativistic concepts, incorporates four-vectors and a Minkowski-like scalar product. Nevertheless, it calls for a reinterpretation of those concepts on relativistic terms.
Bancroft first defines the user’s spatial coordinates, , and those of the n satellites, (for our purposes, ). Then he introduces the pseudorange measurements made by the user with respect to each of the satellites:
where is the Euclidean distance between the ith satellite and the user and b what he calls the user clock’s offset.
Reinterpreting (20) as a past light-cone equation (with the user at its vertex), we identify with the coordinate time component, with respect to some inertial coordinate system , of the world-line of the ith emitter:
and the clock’s offset b, with the inertial time coordinate of the user’s position four-vector x:
Bancroft now defines the four-vectors , which we identify as the (position vectors of the) emitters’ world-lines:
He introduces a scalar product between four-vectors , which is equivalent to the scalar product in Minkowski space-time, , with metric signature .
Bancroft’s solution vector can be readily identified with the user’s position four-vector x of the RPS.
These correspondences are summarized in Table 1. Now we are ready to write down the navigation equations solved by Bancroft, using the RPS notation. These are none other than Equations (1):
with .
This system of four equations can be rewritten with the help of the following scalar:
row vectors:
where
and the following matrix:
where are considered column vectors. The system (21) reads:
or equivalently, provided that is invertible:
where
Equation (26) is Bancroft’s solution to the location problem, where u and v are known from the emitters’ trajectories , and is obtained by solving equation (28). Here we can distinguish the case where (which, as we will see, corresponds to a light-like configuration of the emitters):
and the cases where (which correspond to time-like and space-like emitter configurations):
Bancroft does not make this distinction and implicitly assumes , his solution being Equation (26) with as in (31). The following expression can be used for any value of E:
5. Recovering Bancroft’s Solution from the RPS Solution
In this section, the quantities E, F and G, used to express Bancroft’s solution, are related to the geometric elements of the RPS statement of the location problem. The subjacent correspondence is achieved using exterior calculus in Lorentzian geometry (Minkowski space-time). For clarity, the steps of this calculation are grouped into propositions, proof of which is given in Section 6.
Proposition 1.
Let be a matrix whose columns are the emitters’ world-lines . The inverse of is given by:
the matrix entries now being row vectors
and where
is the determinant of .
On the other hand, for and H we have:
Proposition 2.
The configuration vector χ and the bivector H of a RPS can be written as:
and
respectively.
Notice that , with
is the dual basis of , that is, . Now we can write u and v according to (27):
and the configuration vector can now be written as
With and G defined as in (29), we can state the next proposition.
Proposition 3.
Setting , (i) the particular solution and the discriminant Δ can be written as
and (ii) the RPS solution is expressed as
where u and v are given by (39) and (40), and
which is Equation (32), that is, Bancroft’s solution extended to any emitter configurations, with and the orientation of the RPS at x.
On the other hand, from (41) and (42) we can write Bancroft’s scalars E, F and G, given by (29), explictly in terms of the RPS variables.
In Equation (47) we have used , and .
Equation (46) says that the sign of E provides the causal character of the emitter configuration for x. Therefore, , corresponds to light-like emitter configurations, which are not covered by Bancroft’s solution. In contrast, Equations (16)-(18) and their transcription using Bancroft’s notation (Equations (44) and (45)) are valid for any emitter configuration.
6. Proof of the Propositions
Proposition 1 (proof)
Proposition 2 (proof)
Proposition 3 (proof)
To derive Equation (42), we start by writing out the right-hand side of using (12). Setting and calculating the contraction using (41), we obtain:
since . From (3) and (37) we get:
Then, the particular solution is written as
where, using (6) and (24), the world-function scalars can be expressed as:
Now, substituing (50) in (49) and using (39) and ():
where, in the last step, we have taken into account that and that
is the one-form metrically equivalent to .
7. Four Static Emitters: Solutions
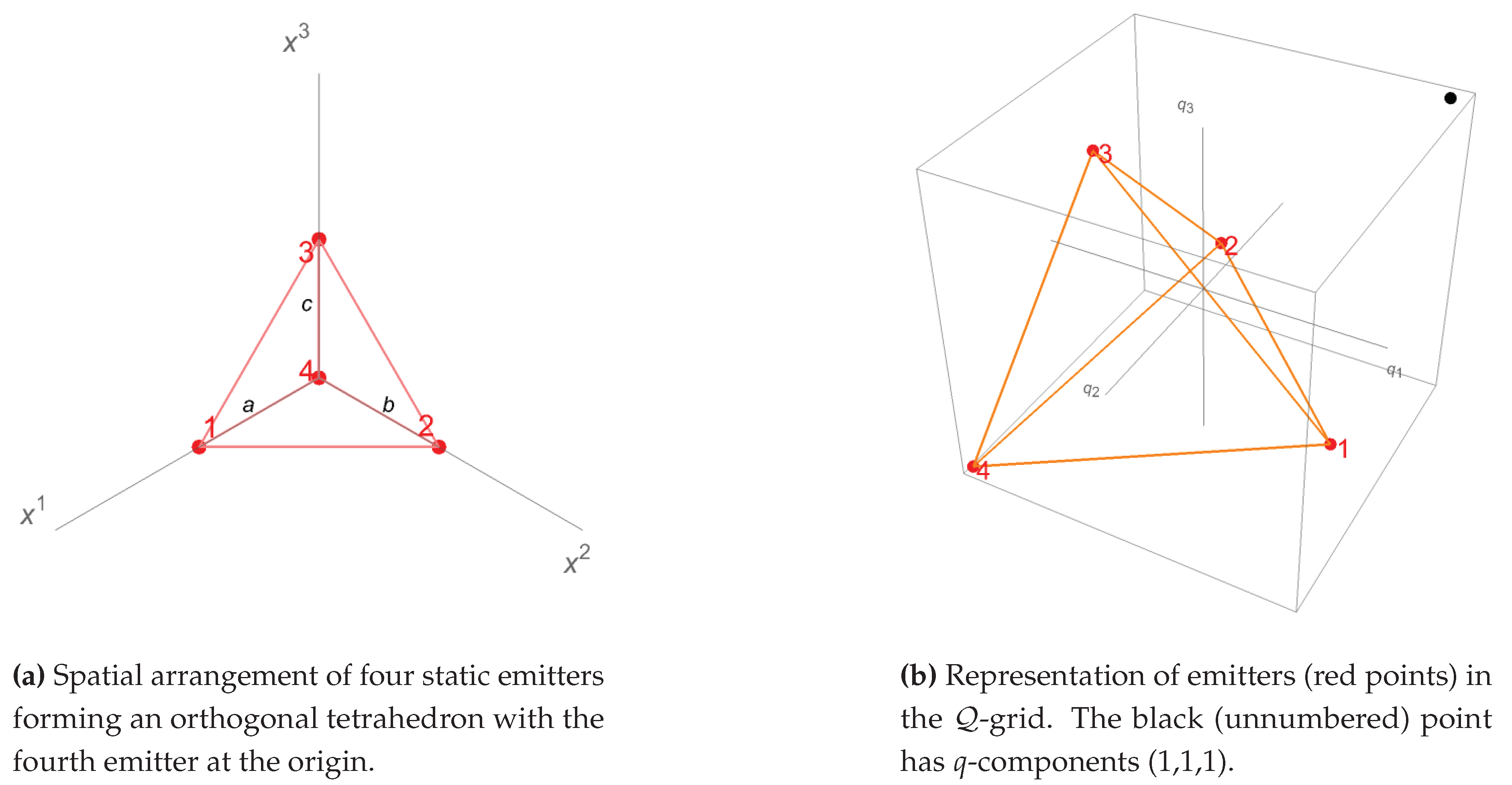
To illustrate the correspondence between the RPS and Bancroft’s solution, in this section we use both approaches to solve the location problem for the case of four static emitters. This is a simple but clarifying example to gain insight into the RPS terminology. For any given time t measured by an inertial observer of unit velocity (), we choose the simple spatial arrangement of an orthogonal tetrahedron as shown in Figure 1, where the reference emitter is at the origin of the observer’s (spatial) coordinate system .
The essential simplification that the static situation provides is the possibility to synchronize the emitters’ clocks at a given common (initial) instant. The respective proper times then become synchronized for ever, which allows to represent the static case in 3-dimensional diagrams. We will come back to this point in Section 8.
Figure 1.
Representation of emitters when .
7.1. Emitters’ World-Lines and Emission/Reception Conditions
As the emitters’ clocks are synchronized at taking , the emitters’ world-lines, expressed with respect to an inertial reference frame , can be easily written down in the case of static emitters:
where are the position vectors, with respect to the fourth emitter, of the other three emitters:
with real constants and where we have switched to component notation, the first component being the coordinate time . We can now write the position vector of the referred emitters with respect to the reference emitter:
where . Then, substituting (53) in (11), we obtain the covariant components of the configuration vector :
where
The Cartesian product is included in the grid of the positioning system and will be called the -grid (quotient grid) according to the meaning of the triads given below. Figure 1 shows the emitters’ arrangement in the -grid (see Equations (76) and (77)).
7.2. Computing the RPS Quantities
To compute the particular solution (12), we begin by setting :
To obtain , we calculate the world-function scalars from (53):
and the bivectors from (14) substituing (53):
Computing the contractions using (3):
yields the covariant components of the particular solution from (12)-(14), using (57) and (58):
To obtain the user’s inertial coordinates from (16), we need the following to calculate from (17):
as it follows from (54) and (60). Then, by substitution in (18),
7.3. Interpretation of the RPS Solution
In order to remark the essential properties of the RPS solution, let us consider the inertial coordinate location of those users whose emission coordinates satisfy the restrictions and . Then, expressions (60)-(64) simplify and their substitution in (16) gives:
with , that is, , and
where Then (65) will be an emission solution iff, in addition to (55) and , Equation (56) holds, with given by (66), that is,
Table 2 shows the result assuming for different values of q, where for the sake of clarity we have taken and thus .
- (i)
- For , the emitter configuration is space-like at , which is the sole emission solution (with ). The solution with is a reception solution.
- (ii)
- For , the emitter configuration is light-like at , which is the sole emission solution (with ). The solution with is degenerate.
- (iii)
- For , the emitter configuration is time-like atboth being emission solutions (with ); is in the front (back) emission coordinate domain.
Similarly, Table 3 shows the result assuming and for different values of q, where again we have taken and thus .
7.4. Computing Bancroft’s Quantities
In order to relate the RPS and Bancroft’s expression of the solution to the location problem, we begin by writing the matrix given by (25), whose columns are the emitters’ world-lines (51):
In component notation:
To calculate , we verify that:
and that the row vectors (1-forms) , appearing in (33) and given by (34), are expressed as:
where is the dual basis of the inertial cartesian basis.
Now we can write :
and then compute the vector u and verify (41):
The vector v is obtained from (40), by substitution of (70), (71) and (24) with
After simplification, it results:
We can substitute (73)-(75) and in Equation (42) and check that it is satisfied.
To compute the user’s coordinates from Bancroft’s solution (26), with as in (31) or (32), we need the following expressions for E, F and G, which follow from (73) and (75) by scalar product:
Notice that Bancroft’s quantities E, F and G involve the emission coordinates in addition to . In contrast, the RPS quantities and are polynomial functions only of the variables. This property simplifies the representation of the RPS regions in the -grid, which is carried out in the next section.
8. Four Static Emitters: Representations
In this section we continue with the preceding example. The characteristic regions of the RPS solution are represented both in Cartesian and in emission coordinates.
8.1. Representations in Cartesian Coordinates
Figure 2 shows, for a given value (inertial instant), the emission configuration regions (space-like), (light-like) and (time-like) which are colored in green, red and blue, respectively. The region is the union of two disjoint regions, denoted by -front and -back, separated by the 3-surface , which is shown in black. This 3-surface, where the Jacobian determinant of vanishes, is the border between the front (-front) and the back (-back) coordinate domains. The union of both disjoint domains is called the emission coordinate region [9,10].
Figure 2.
Representation of the emission configuration regions for a RPS with four static emitters (when ). The emission configuration regions (space-like), (light-like) and (time-like) are colored in green, red and blue, respectively. The 3-surface where vanishes is shown in black.
Figure 2.
Representation of the emission configuration regions for a RPS with four static emitters (when ). The emission configuration regions (space-like), (light-like) and (time-like) are colored in green, red and blue, respectively. The 3-surface where vanishes is shown in black.
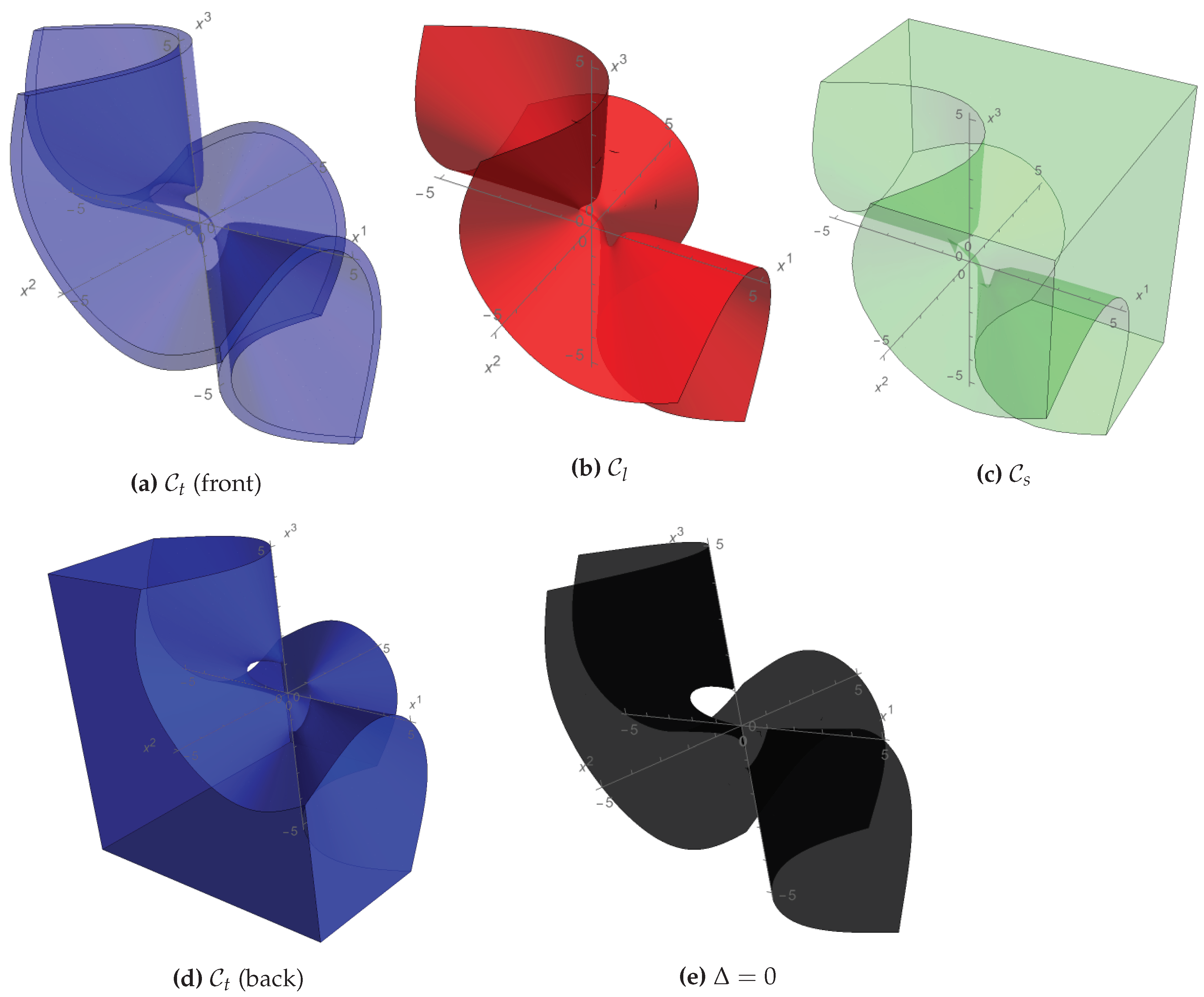
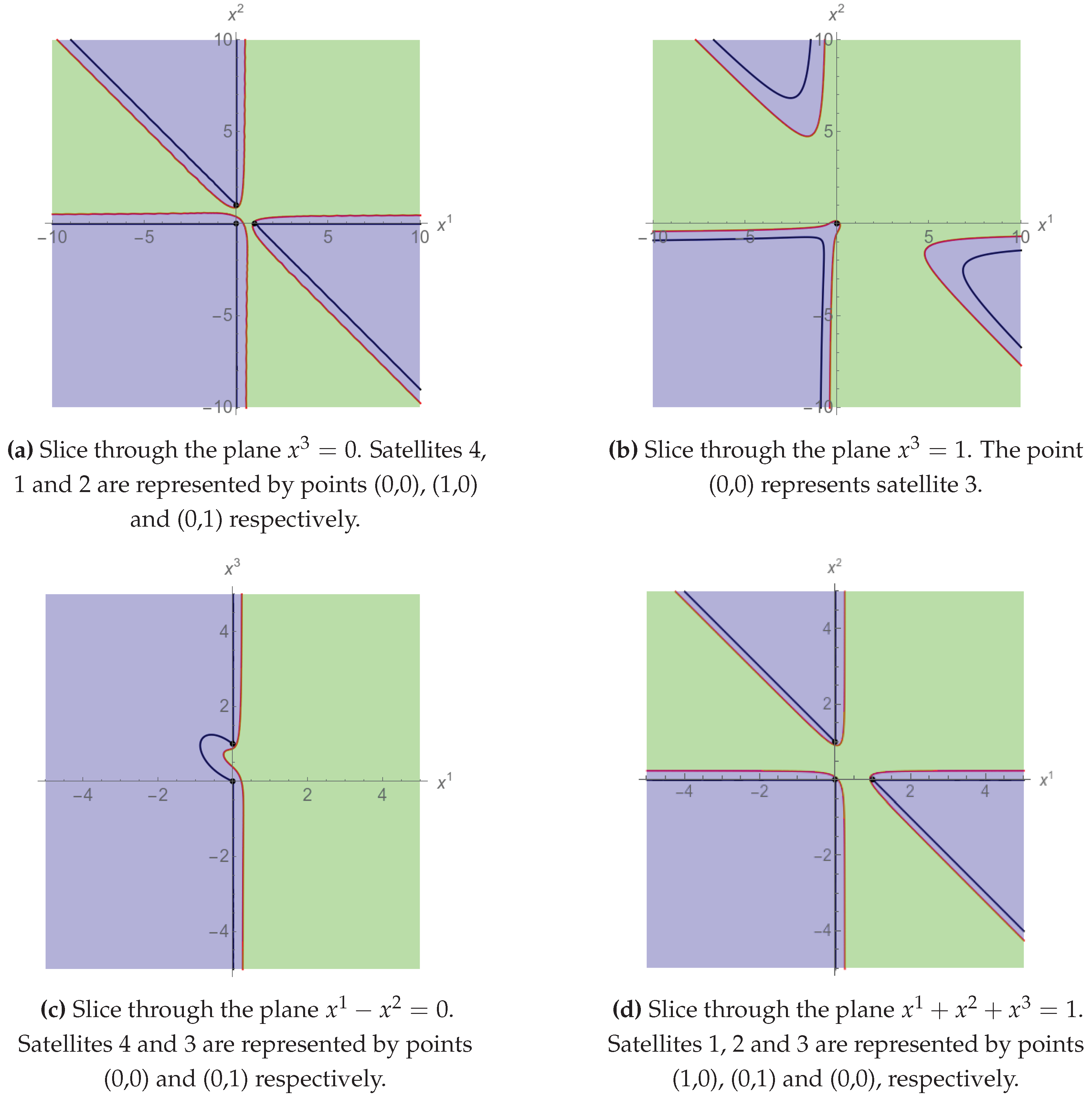
Figure 3 includes two dimensional slices of the emission configuration regions shown in Figure 2. The black points represent the satellite trajectories. The intersection with is also represented.
Figure 3.
Slices of the emission configuration regions (shown in Figure 2) through different 2-planes. Black points represent the satellites.
Figure 3.
Slices of the emission configuration regions (shown in Figure 2) through different 2-planes. Black points represent the satellites.
8.2. Representations in the -Grid
Since the emitters’ trajectories in inertial coordinates are known from (51), we can obtain their positions in the -grid, as well as their trajectories in the grid . For we have
and
which are straight lines in the direction defined by . In other words, the (parallel) emitter world-lines are represented as parallel lines in the grid along the direction defined by the main bisectrix. Each is represented by the corresponding point in the quotient grid . Figure 1 is a representation of the emitters in the -grid.
The boundary of the emission/reception conditions (55) defines twelve 2-planes in the -grid, which are denoted by , . is the representation in the -grid of the shadow that satellite A produces to satellite B. Concretely, for we have,
Figure 4 contains representations in the -grid for . Figure 4 represents the convex polyhedron formed by pieces of the twelve satellite shadows (78). It has faces (six squares with side length and six rhomboids with side lengths and ), that is, a dodecahedron, which we may call the shadow-dodecahedron . The fourteen vertices of are, apart from and , the following points:
and their opposites. The interior of contains the -grid points that satisfy the emission/reception conditions (55). Figure 4 shows the surface of vanishing Jacobian determinant of the coordinate transformation , equivalently , in the -grid. This surface is strictly confined inside . The interior of this surface satisfies and corresponds to solutions of the null propagation equations. The region inside satisfying does not represent any physical region in the -grid.
Figure 4.
Representation of the surface in the -grid region where the emission/reception conditions are satisfied (with ), which is bounded by .
Figure 4.
Representation of the surface in the -grid region where the emission/reception conditions are satisfied (with ), which is bounded by .
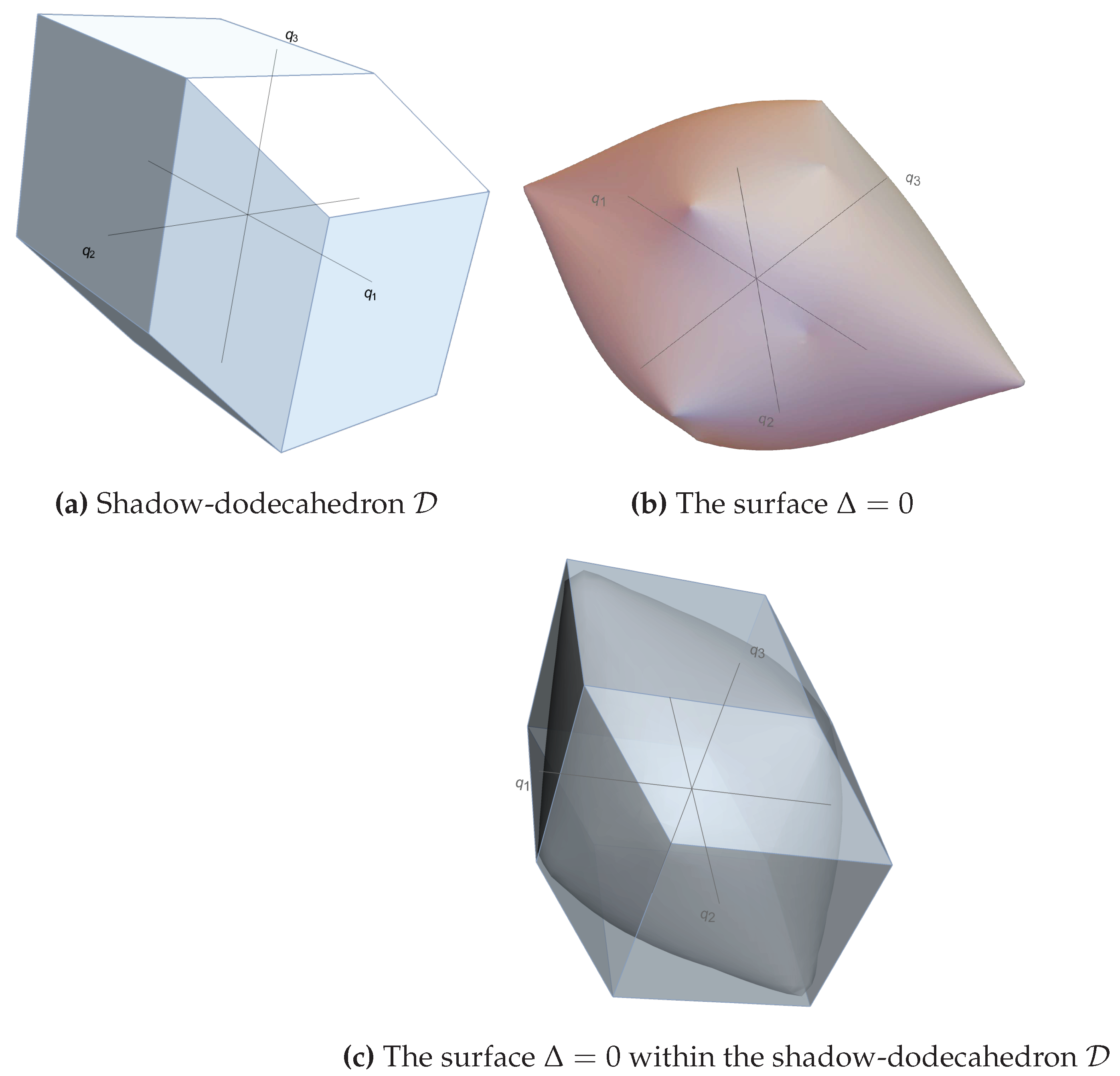
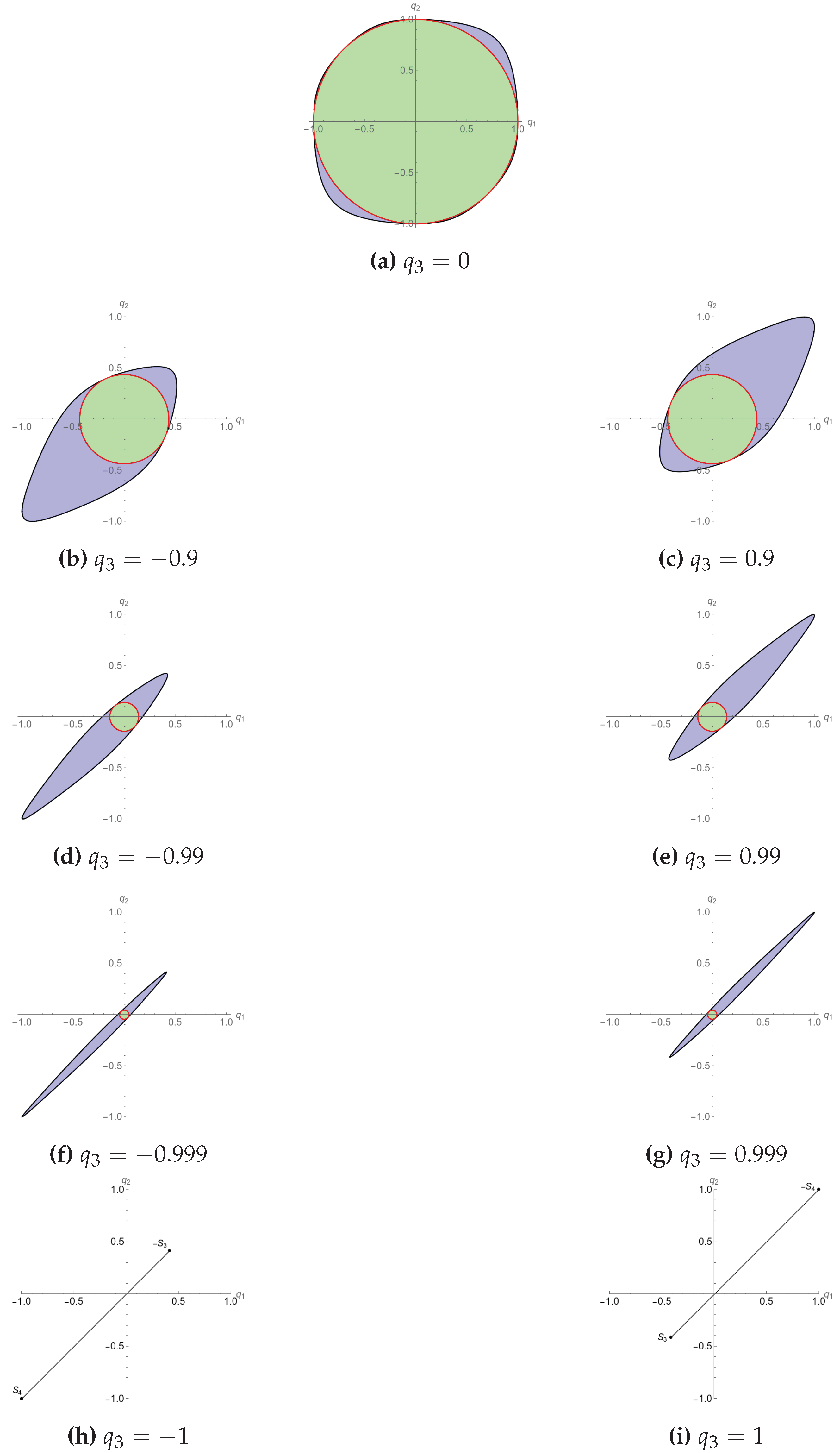
Figure 5 shows two dimensional slices of the configuration regions in the -grid, applying the emission/reception conditions (55) for . The colors green, red and blue are used for the space-like, light-like or time-like character of the configuration, respectively. The black lines are different slices of the 2-surface . For clarity, the intersections with the shadow-dodecahedron are not shown.
Figure 5.
Representation of the emitter configuration regions in the -grid for different values of when . The colors green, red and blue are used for the space-like, light-like or time-like character of the configuration, respectively. The black lines are different level cuts of the 2-surface . For () the points shown are and ( and ), with and the third and fourth satellite, respectively, given by (77).
Figure 5.
Representation of the emitter configuration regions in the -grid for different values of when . The colors green, red and blue are used for the space-like, light-like or time-like character of the configuration, respectively. The black lines are different level cuts of the 2-surface . For () the points shown are and ( and ), with and the third and fourth satellite, respectively, given by (77).
9. Emission-Reception Conditions and Grid Regions
Figure 1b, Figure 4 and Figure 5 provide representations in the -grid of the standard positioning data and the elements derived from these data. In this section, we use the -grid representations to obtain further information about other regions where solutions to the null propagation equations (1) exist, without imposing all of the emission/reception conditions (55). We analyze a mixture of emission and reception conditions that apply to other location systems [1,2] based on null coordinates such as reception or radar coordinates. For an analysis of the notion of a location system (physical realization of a coordinate system) see [5] and previous references quoted therein.
Figure 6 shows the surfaces in the -grid defined by , in whose interior there is a solution to the null propagation equations. There exist fifteen disjoint regions satisfying . The exterior of this surface () has no physical meaning. The interior () is the -grid representation of the solutions to the null propagation equations and is disjointly divided in fifteen regions. Only one region contains the origin and is divided in two subregions where all the emission/reception conditions are satisfied (see Figure 4). Among the fourteen remaining regions eight satisfy only three emission/reception conditions (each one is confined by three pairs of parallel planes). The other six satisfy only two emission/reception conditions (each one is confined by two pairs of parallel planes).
Table 4 shows the signs of the products () and the related regions.The emission or reception character of a -coordinate is denoted by e or r respectively.
The results of this section may be compared with those presented in [7,8] regarding the 2D localization of a source with three receivers. In particular, there is an interesting similarity between the surface of vanishing Jacobian (Fig. Figure 6) and the Kummer surface represented in Figure 4 of [8]. The surface shown in Figure 6 has a total of thirty-two singular points, eight of them on the central piece and twenty-four on the tube-like pieces, each of these points connecting the different pieces that make up the surface. In addition to and , the surface has the following singular points:
and their opposites. Of these singular points, only and are also vertices of .
Figure 7 shows the cuts of the surface with the different planes . Similar cuts are obtained for constant values of or .
10. Conclusions
The RPS approach to GNSSs is grounded in the fundamental principles of relativity on which, one might think, navigation systems should be based. Current GNSSs rely on a posteriori corrections for (special) relativistic effects (and for gravitational, atmospheric and instrumental effects). In this paper we have deduced a classical solution to the navigation equations, Bancroft’s solution, which is still in use today, within a relativistic framework. In fact, Bancroft’s closed-form solution is suitable for this purpose, since it already incorporates four-vectors and a Minkowski scalar product, although it still presumes a universal time and a deviation from it (the clock offset). We have recovered Bancroft’s solution from the RPS solution using the language of relativity: contravariant (column) and covariant (row) vectors, their inner (scalar) product and their exterior algebra.
The characteristic elements of a RPS (emission and configuration regions, front and back coordinate domains, shadows produced by the satellites to each other, etc.) have been exemplified for the static situation. These regions are represented both in the physical and in the grid space of the RPS, by introducing an appropiate quotienting procedure. This kind of representation has been tentatively studied for other location systems for which not all the emission/reception conditions are assumed. However, to deal with general location systems, the RPS terminology should be appropriately adapted.
All of this with the hope of bringing the traditional GNSS approach closer to the framework of Relativity Theory, a worthwhile task, if only from a scientific perspective.
[custom]
Author Contributions
Both authors contributed equally to develop the idea of the manuscript and have read and agreed to the published version of the manuscript.
Funding
We would like to thank the support from the Spanish Ministerio de Ciencia, Innovación y Universidades, Projects PID2019-109753GB-C21/AEI/10.13039/501100011033 and PID2019-109753GB-C22/AEI/10.13039/501100011033 and from the Conselleria d’Educació, Universitats i Ocupació, Generalitat Valenciana, Project CIAICO/2022/252.
Institutional Review Board Statement
Not applicable
Informed Consent Statement
Not applicable
Data Availability Statement
Not applicable
Acknowledgments
We would like to thank the /Universe/ Editorial Office at MDPI for the invitation to submit this manuscript free of charge.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Coll, B. Relativistic positioning systems: perspectives and prospects. Acta Futura 2013, 7, 35–47. [Google Scholar] [CrossRef]
- Coll, B. Epistemic Relativity: An Experimental Approach to Physics; Springer International Publishing, 2019; pp. 291–315. [CrossRef]
- Coll, B.; Pozo, J.M. Relativistic positioning systems: the emission coordinates. Classical and Quantum Gravity 2006, 23, 7395. [Google Scholar] [CrossRef]
- Pozo, J. Constructions in 3D (I) and (II); Talks delivered at the School on Relativistic Coordinates, Reference and Positioning Systems (University of Salamanca, Spain), 2005.
- Coll, B.; Ferrando, J.J.; Morales, J.A. Two-dimensional approach to relativistic positioning systems. Phys. Rev. D 2006, 73, 084017. [Google Scholar] [CrossRef]
- Coll, B.; Ferrando, J.J.; Morales, J.A. Positioning with stationary emitters in a two-dimensional space-time. Phys. Rev. D 2006, 74, 104003. [Google Scholar] [CrossRef]
- Compagnoni, M.; Notari, R.; Antonacci, F.; Sarti, A. A comprehensive analysis of the geometry of TDOA maps in localization problems. Inverse Problems 2014, 30, 035004. [Google Scholar] [CrossRef]
- Compagnoni, M.; Notari, R.; Ruggiu, A.A.; Antonacci, F.; Sarti, A. The Algebro-geometric Study of Range Maps. Journal of Nonlinear Science 2017, 27, 99–157. [Google Scholar] [CrossRef]
- Coll, B.; Ferrando, J.J.; Morales-Lladosa, J.A. Positioning systems in Minkowski spacetime: from emission to inertial coordinates. Classical and Quantum Gravity 2010, 27, 065013. [Google Scholar] [CrossRef]
- Coll, B.; Ferrando, J.J.; Morales-Lladosa, J.A. Positioning systems in Minkowski space-time: Bifurcation problem and observational data. Phys. Rev. D 2012, 86, 084036. [Google Scholar] [CrossRef]
- Strang, G.; Borre, K. Linear Algebra, Geodesy, and GPS; Wellesley-Cambridge Press, 1997. [Google Scholar]
- Closas, P.; Gusi-Amigo, A. Direct Position Estimation of GNSS Receivers: Analyzing main results, architectures, enhancements, and challenges. IEEE Signal Processing Magazine 2017, 34, 72–84. [Google Scholar] [CrossRef]
- Vincent, F.; Vilà-Valls, J.; Besson, O.; Medina, D.; Chaumette, E. Doppler-aided positioning in GNSS receivers - A performance analysis. Signal Processing 2020, 176, 107713. [Google Scholar] [CrossRef]
- Compagnoni, M.; Notari, R.; Antonacci, F.; Sarti, A. On the statistical model of source localization based on Range Difference measurements. Journal of the Franklin Institute 2017, 354, 7183–7214. [Google Scholar] [CrossRef]
- Bancroft, S. An Algebraic Solution of the GPS Equations. IEEE Transactions on Aerospace and Electronic Systems 1985, AES-21, 59–59. [Google Scholar] [CrossRef]
- Abel, J.; Chaffee, J. Existence and uniqueness of GPS solutions. IEEE Transactions on Aerospace and Electronic Systems 1991, 27, 952–956. [Google Scholar] [CrossRef]
- Chaffee, J.; Abel, J. On the exact solutions of pseudorange equations. IEEE Transactions on Aerospace and Electronic Systems 1994, 30, 1021–1030. [Google Scholar] [CrossRef]
- Ruggiero, M.L.; Tartaglia, A.; Casalino, L. Geometric definition of emission coordinates. Advances in Space Research 2022, 69, 4221–4227. [Google Scholar] [CrossRef]
- Feng, J.C.; Hejda, F.; Carloni, S. Relativistic location algorithm in curved spacetime. Phys. Rev. D 2022, 106, 044034. [Google Scholar] [CrossRef]
- Serrano Montesinos, R.; Morales-Lladosa, J.A. Bancroft’s GPS navigation solution: relativistic interpretation; I.U. de Matemática Multidisciplinar, Universitat Politècnica de València, 2023; pp. 150–157.
- Coll, B.; Pozo, J.M. General Causal Properties of Emission Coordinates. Preprint (private communication). 2006. [Google Scholar]
- Coll, B.; Ferrando, J.J.; Morales-Lladosa, J.A. Newtonian and relativistic emission coordinates. Phys. Rev. D 2009, 80, 064038. [Google Scholar] [CrossRef]
Figure 6.
Representation of the surface in the -grid for . The closed piece at the centre is represented in Figure 4.
Figure 6.
Representation of the surface in the -grid for . The closed piece at the centre is represented in Figure 4.
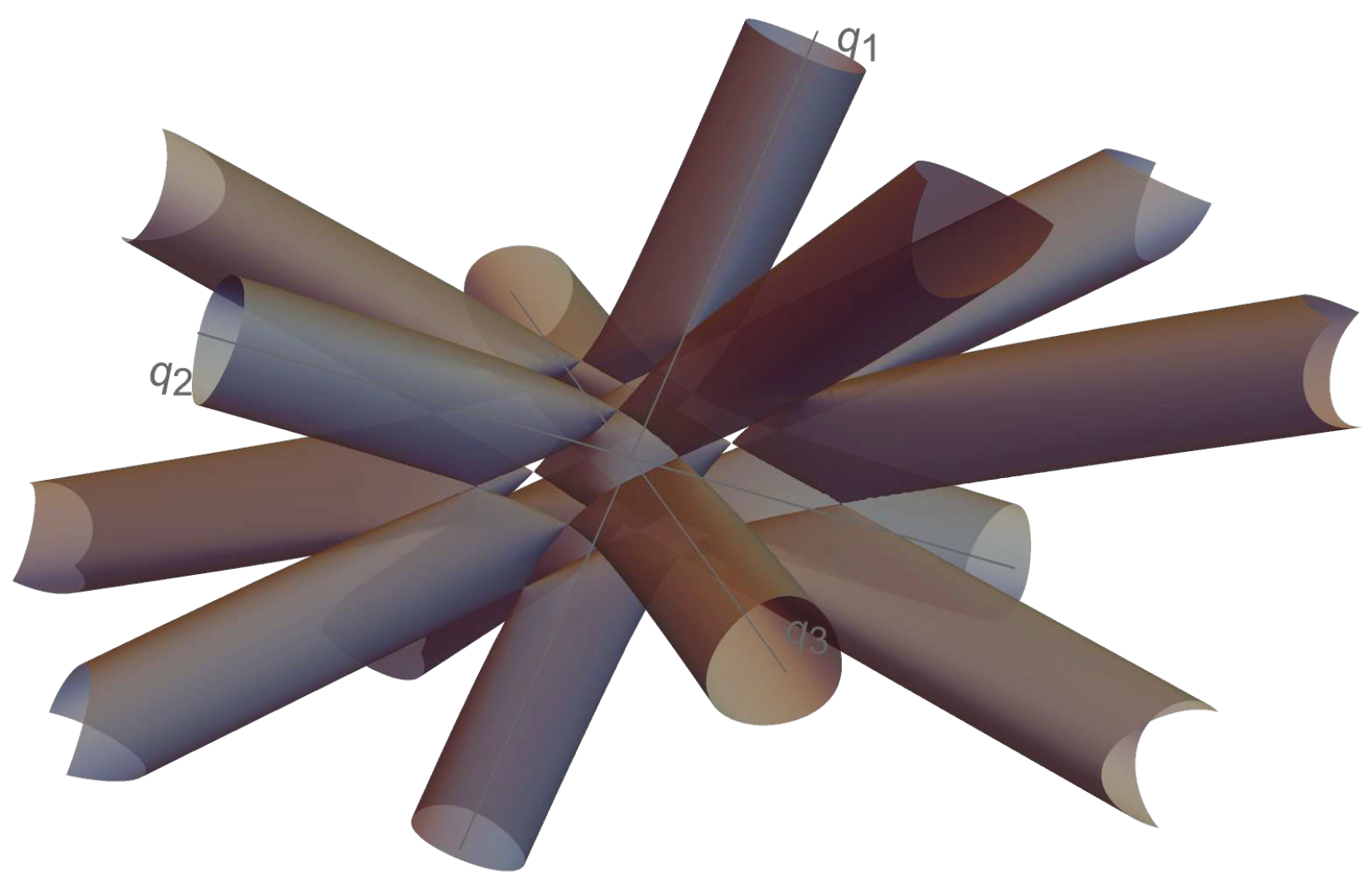
Figure 7.
Representation in the -grid of the level lines for different values of k and with . The points in Figure 7 and Figure 7 are singular points.
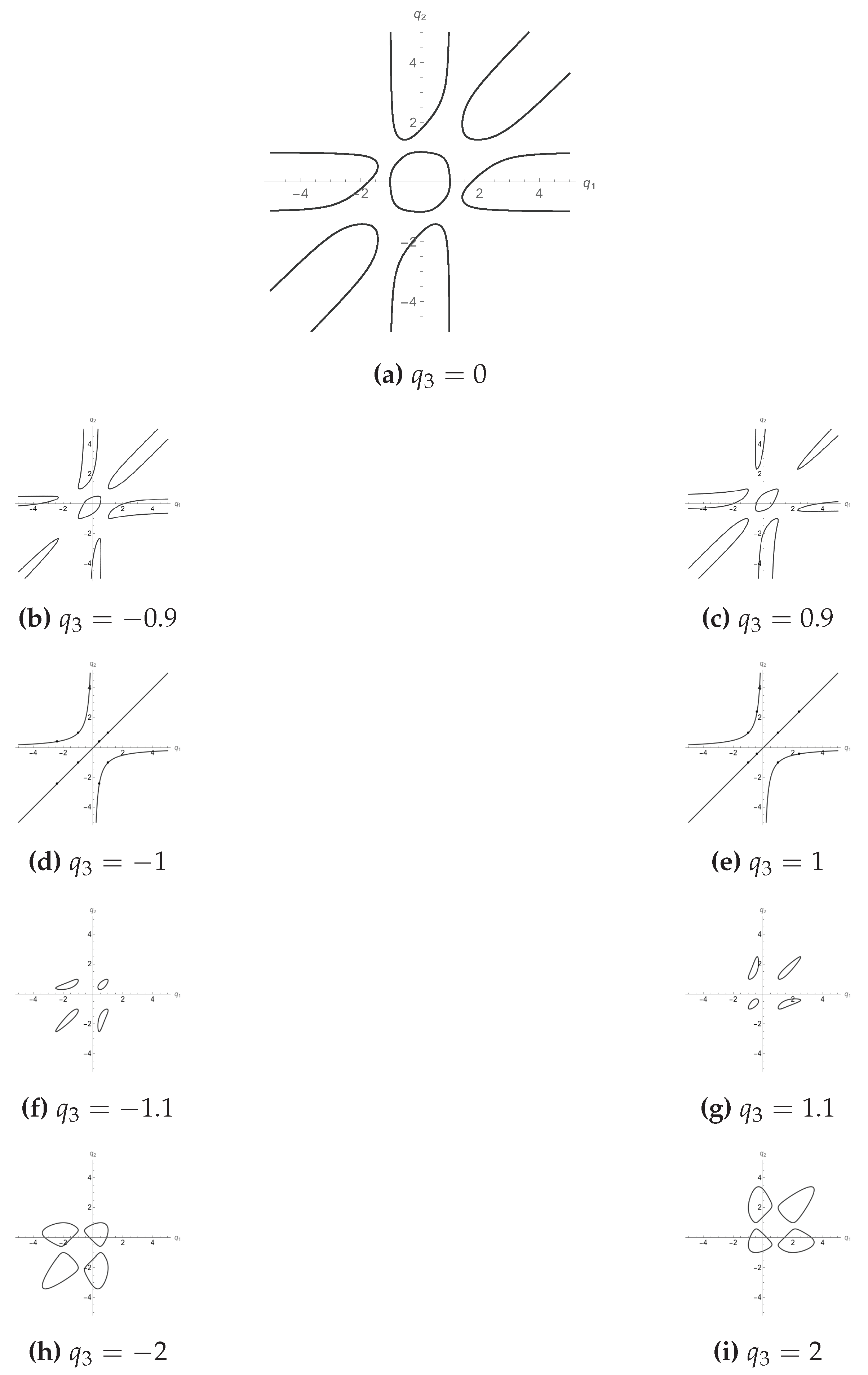

Table 1.
This is a table caption. Tables should be placed in the main text near to the first time they are cited.
Table 1.
This is a table caption. Tables should be placed in the main text near to the first time they are cited.
| Bancroft | RPS | ||
|---|---|---|---|
| pseudorange | emitter coordinate time | ||
| data vector | emitter worldline | ||
| clock offset | b | t | user coordinate time |
| solution vector | x | user position four-vector | |
Table 2.
RPS solution for users with and .
| q | Emission solutions | ||||
| 0 |
One emission solution |
||||
| 0 |
One emission solution |
||||
| 1 |
, Two emission solutions |
Table 3.
RPS solution for users with , and .
| q | Emission solutions | ||||
| 0 | |||||
| One emission solution | |||||
| 0 | |||||
| One emission solution | |||||
| , | |||||
| Two emission solutions |
Table 4.
Regions according to the sign of the products (). The emission or reception character of a -coordinate is denoted by e or r, respectively. The subregions and form one region containing the origin (closed piece at the center of Figure 6). The other fourteen regions correspond to the fourteen tube-like pieces emerging fom the central piece in Figure 6.
Table 4.
Regions according to the sign of the products (). The emission or reception character of a -coordinate is denoted by e or r, respectively. The subregions and form one region containing the origin (closed piece at the center of Figure 6). The other fourteen regions correspond to the fourteen tube-like pieces emerging fom the central piece in Figure 6.
| Character | ||||||
|---|---|---|---|---|---|---|
| − | − | − | − | − | − | |
| − | − | + | − | + | + | , |
| − | + | − | + | − | + | , |
| + | − | − | + | + | − | , |
| + | + | + | − | − | − | , |
| − | + | + | + | + | − | , |
| + | − | + | + | − | + | , |
| + | + | − | − | + | + | , |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



