
Submitted:
05 March 2024
Posted:
06 March 2024
You are already at the latest version
Abstract
This paper aims to address the exponential stability and stabilization problems for a class of delayed nonlinear Markov jump systems under randomly occurring Denial-of-Service (DoS) attack and packet loss. Firstly, the stochastic characteristics of DoS attack and packet loss are depicted by the attack success rate and packet loss rate. Secondly, a Period Observation Window (POW) method and a hybrid-input strategy are proposed to compensate for the impact of DoS attack and packet loss on the system. Thirdly, A Dynamic Event-triggered Mechanism (DETM) is introduced to save more network resources and ensure the security and reliability of systems. Then, by constructing a general common Lyapunov functional and combining with the DETM and other inequality analysis techniques, the less conservative stability and stabilization criteria for the underlying systems are derived. In the end, the effectiveness of our result is verified through a numerical example.
Keywords:
Delayed nonlinear Markov jump systems
; attack success rate
; Packet loss rate
; Dynamic Event-triggered Mechanism
; Exponential stability and stabilization
1. Introduction
In recent decades, Markov Jump Systems (MJSs) have received widespread attention [1,2] due to their powerful ability to depict the mutation phenomenon that the parameter and structure of real systems often encounter. It is worth mentioning that some undesirable dynamic behaviors, such as cyber attack [3,4], packet loss [5,6], time delay [7,8], non-linearity [9,10], often appear in the real systems, due to the openness of communication network, limited bandwidth, external disturbance and signal propagation. As well known, the stability is a prerequisite to ensure the normal operation of the system. However, such undesirable dynamic behaviors often lead oscillation, chaos, and even instability. Therefore, it is very interesting to study the stability and stabilization problems of the Delayed Nonlinear MJSs (DNMJSs) under cyber attack and packet loss.
Generally, there are two kinds of common cyber attack, named Denial-of-Service (DoS) attack and deception attack. Compared with deception attack, DoS attack is often launched by occupying communication resources to prevent the normal operation of the network and poses strong aggressiveness and ease of implementation, so it has became the most threatening form of cyber attack. Recently, many fruit results on the stability and stabilization problems of DNMJSs under DoS attack or packet loss have been achieved [11,12]. From the perspective of characterization methods, Bernoulli process [11,12,13] and Markov processes [14,15] are often used to model the stochastic properties of the DoS attack and packet loss. From the viewpoint of compensation strategies, the hold-input strategy and zero-input strategy are often adopted to deal with the impacts of DoS attack and packet loss on the systems. Name a few, the hold-input strategy is used to achieve faster and smoother stability of the systems in [16,17]. The stochastic behaviors of the packet loss is modeled by a Bernoulli process, and a zero-input strategy is adopted to compensate for the impacts of packet loss in [12]. However, DoS attack and packet loss are rarely mentioned together, and few papers consider attack success rate and packet loss rate, which will limit its applicability in practical applications. Therefore, it is necessary to consider the impacts of attack success rate and packet loss rate on system performance at the same time, which prompts this paper.
On the other hand, with the increasing pressure of network communication, especially in the case of limited network resources, how to improve the resource utilization rate has become the focus of many scholars. To this end, the traditional time-triggered mechanism, such as sampled-data control or impulsive control, are widely used in recent years [18]. However, they cannot determine the triggered time on demand, which results in a waste of communication resources to a certain extent. For event-triggered mechanism, the signals are transmitted only when the system state meets the preset triggered condition, which can effectively overcome the aforementioned obstacle. It is worth noting that according to the type of triggered parameters, event-triggered mechanisms are often divided into Static Event-triggered Mechanism (SETM) [19,20] and Dynamic Event-triggered Mechanism (DETM) [21,22]. Compared with the SETM, DETM contains a non-negative internal dynamic variable in the event-triggered condition relied on the system’s state and error state, which make DETM has greater advantages in reducing communication costs. Thus, how to use DETM to study the security control problem of Delayed MJSs under DoS attack and packet loss shall be an interesting topic.
Based on the points discussed above, this paper will further study the dynamic event-triggered security control problem for a class of DNMJSs under randomly occurring DoS attack and packet loss. The main contributions of this paper are summarized as follows:
- Two independent Bernoulli processes are introduced to describe the stochastic characteristics of attack success rate and packet loss rate during the action-period and sleeping-period, respectively.
- Considering the physical properties of randomly occurring DoS attack and packet loss, the POW method and hybrid-input strategy are proposed, which are very useful to depict the evolution law of DoS attack and packet loss.
- By constructing a general common Lyapunov functional, combining with DETM and other inequality analysis techniques, the less conservative security stability criteria are obtained.
Notations: Throughout this paper, , represent the set of real numbers and the set of positive integer numbers, respectively. , and stand for a dimensional Euclidean space, the set of real matrices and the set of symmetric positive definite matrices, respectively. The symbol ∗ denotes the symmetric entry in the symmetric matrix. . represents the inner product of vectors .
2. Problem Formulation and Preliminary
2.1. System Description
Consider the following DNMJSs:
where is the state vector, denotes the time-varying delay that satisfies , is the initial condition, is the control input, are known constant matrices, is the external disturbance that satisfies Assumption 1, is a Markov jump process taken values in the finite set , and its transition rate matrix satisfies:
where . represents the transition rate from the mode i at time t to the mode j at time , and . For the convenience, denote , when .
Assumption 1
Assumption 2
Definition 1
Definition 2
Lemma 1
2.2. DoS Attack and Packet Loss
The openness and complexity of the communication network often leads to DoS attacks and packet loss, which can reduce or even destroy the performance of the system. Thus, this paper shall consider the DoS attack and packet loss in the communication network between the zero-order holder (ZOH) and the actuator (as shown in Figure 1), and the DoS attack and packet loss have the following characteristics: (1) the DoS attack and packet loss will not occur in a same time interval. (2) the DoS attack and packet loss will occur randomly.
To depict such kind of DoS attack and packet loss more intuitively, a Periodic Observation Window (POW) method is proposed to model the first characteristic of DoS attack and packet loss. Specifically, the nth POW is designed as , which can be divided into and , where , ℓ is an observation period. is the sleeping-period of DoS attack, is the action-period of DoS attack, and DoS attack and packet loss will occur in the action-period and sleeping-period, respectively. It is worth noting that during the sleeping-period, the control signal cannot be transmitted to the actuator if the packet loss occur, and during the action-period, the control signal cannot be transmitted to the actuator if the attack succeeds.
Furthermore, two random variables and are introduced to model the second characteristic of DoS attack and packet loss, which are independent for each other and obey the Bernoulli distribution, i.e.,
From the property of Bernoulli distribution, it is easy to see that , , , , where represent the expectation of random variables.
Remark 1.
From the view of defense, the POW method can provide an effective way for defenders to monitor the cyber attack, and also provide a feasible strategy for defenders to compensate for the adverse impacts of Dos attack and packet loss. Furthermore, compare with the existing literature, the characteristics of DoS attack and packet loss considered in this paper is more in line with the actual situation.
2.3. Dynamic Event-Triggered Mechanism
In order to further reduce the burden of network transmission, a DETM shall be introduced in this section. To this end, it is assumed that the system state is sampled with a fixed sampling period h, the mth sampling instant is denoted as and satisfies . Furthermore, the kth triggering instant is denoted as and satisfies the following DETM:
where , is a triggering threshold, W is a weighting matrix to be determined, stands for the error state between the current sampling state and the latest triggered state. is a dynamic variable that satisfies the following dynamic rule:
where and are the given constants, is a weighting matrix to be determined. The initial condition is .
Remark 2.
It is easy to see that , which implies the triggering interval , thus the DETM can avoid the Zeno behavior naturally. Furthermore, as reported in [23], for the given constants , , and a weighting matrix , there is always a constant δ satisfying
such that the dynamic variable satisfies for . In addition, the DETM designed in this paper relies on the current sampling states of system, and the dynamic variable can be adjusted dynamically with the sampling instants, which result that the data transmission rate can be reduced to a large extent.
2.4. Control Input Strategy
In order to compensate for the adverse influence on the systems from DoS attack and packet loss, this paper shall adopt the hybrid-input strategy, i.e., the zero-input strategy is adopted when the DoS attack and packet loss occur, otherwise the hold-input strategy is adopted. Then, combining with the DETM and the physical characteristics of DoS attack and packet loss, the control input can be designed as
where is the controller gain matrix to be determined, , where , .
2.5. Model Transformation
In this section, the input delay method and interval decomposition approach shall be used to describe the control input under the randomly occurring DoS attack and packet loss. Firstly, the relationship between the triggering instants and the sleeping-period and action-period of POW should be discussed as follows:
- A)
- During the sleep-period :where , and . Noted that if then , otherwise . Similarly, , , and .
- B)
- During the action-period :where , and . Noted that if , then , otherwise . Similarly, , , and .
Based on the interval decomposition in (9) and (10), for , it follows from the input delay method that
where , , , , . It is easy to find that is a piece-wise continuous function, which satisfies and
Combining with (8) and (12), the DNMJSs (1) can be rewritten as the following switched systems:
where , .
3. Main Results
Before presenting the main results, the following vectors need to be given.
In this section, the exponential stability and stabilization criteria for the system (13) under the randomly occurring DoS attack and packet loss are established in terms of LMIs.
Theorem 1.
Proof of Theorem 1.
Construct the following Lyapunov functional:
where
According to Definition 2, it follows:
By using the Jensen integral inequality in [10] and Lemma 1, with the help of (15) and (16), the last two integral quadratic terms of (20) can be rewritten as:
From Assumption 1, we have
where the scalars and .
Case A: During the sleeping-period , one can obtain from (5) and (6) that,
Combining with (20) – (23), we have
Thus, it follows from (17) and (24) that,
Then, for , one can obtain from (25) and Dynkin formula [2] that
It follows from that
For , from (14), we have
where . And because of , then . Thus
Case B: During the action-period , one can obtain from (5), (6) and that
Combining with (20), (21) and (30),
According to (18) and (31), it follows that
Next, based on Theorem 1, we shall to solve the controller gain matrix and the weighting matrices and in the DETM.
Theorem 2.
4. Numerical Example
Example 1.
Consider the system (13) with the following parameters:
and other parameters are given as , the attack success rate and packet loss rate are set as , respectively. The mode transition rate is given as .
Based on the above parameters, by using the Matlab LMI toolbox to solve the LMIs in Theorem 2, we can get: and
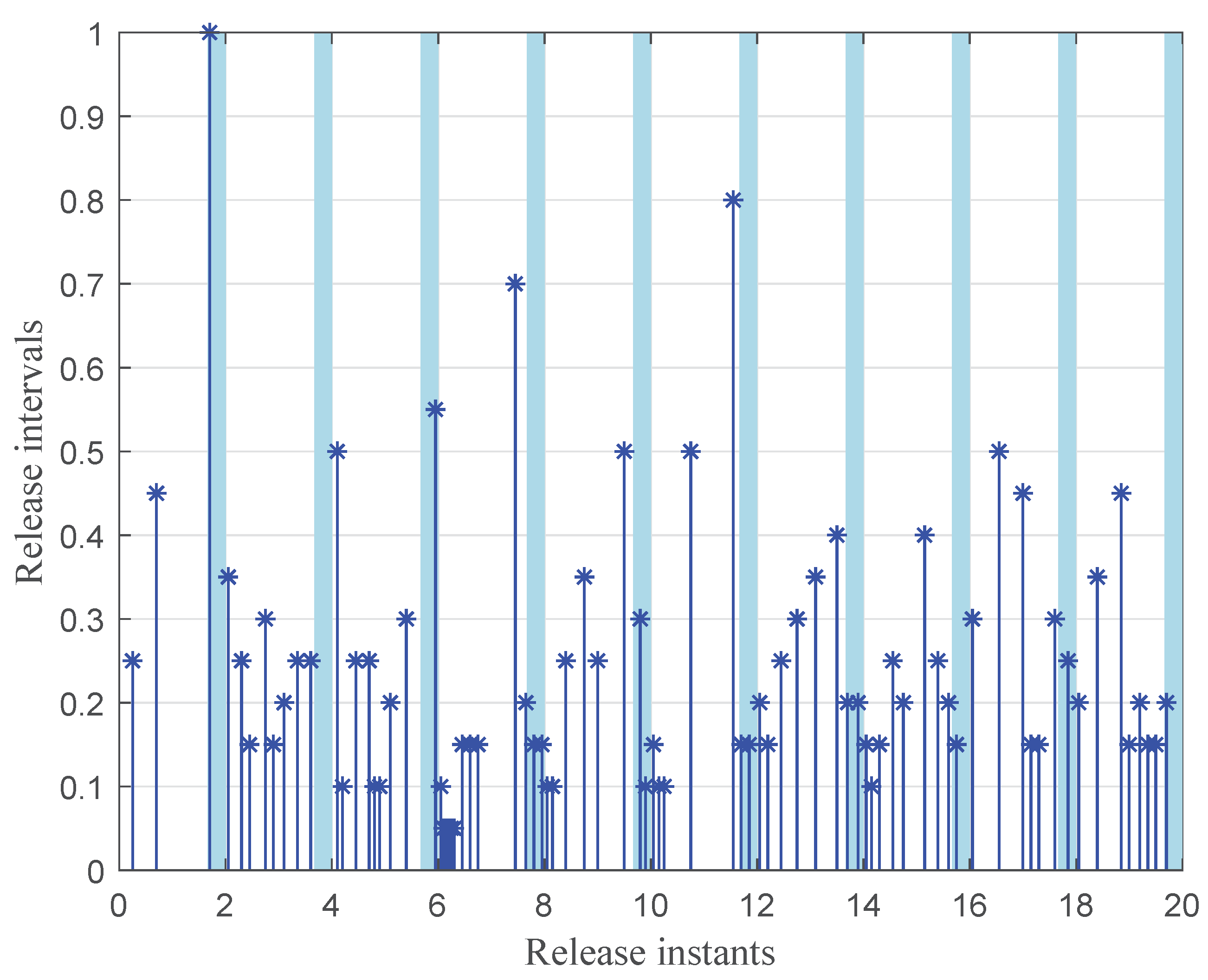
Furthermore, let the nonlinear function , the initial condition , combining with the above gain matrices, the simulation results of systems (13) are given in the following figures. As shown in Figure 2, system (13) cannot achieve stability without control. As shown in Figure 3, the system state gradually reaches the stable state under DETM. Figure 4 is the control input of system (13) under DETM. Figure 5 shows the dynamic evolution process of the function , which shows a downward trend as a whole. Figure 6 shows the relationship between triggered instants and triggered intervals. In summary, this example demonstrates that DETM (5) can not only stabilize the system under the influence of DoS attack and packet loss, but also alleviate network communication pressure to a certain extent.
5. Conclusions
This paper has studied the exponential stability and stabilization problems of a class of DNMJSs under randomly occurring DoS attack and packet loss. The attack success rate and packet loss rate have been used to describe the stochastic characteristics of DoS attack and packet loss. The POW mehtods and hybrid-input strategy have been proposed to compensate for the impacts of DoS attack and packet loss on the systems. By constructing a general common Lyapunov functional, and combining with the DETM, and other analysis approaches, the less conservative stability criteria are obtained. Finally, a simulation example was used to verify the validity of our results. In the future, the results provided in this paper shall be helpful to investigate other analysis and synthesis of Markov jump systems under cyber attacks and packet loss.
Author Contributions
Conceptualization, H.Y. Zhang; methodology, L.L. Xiong; software, Y. Zhang; validation, H.Z. Chen; investigation, X.X.; writing—original draft preparation, H.Z. Chen; writing—review and editing, H.Y. Zhang; visualization, Y. Zhang; supervision, L.L. Xiong. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Nature Science Foundation of China under Grants 12061088, 12261104, and 61833005, the Basic Research Youth Fund Project of Yunnan Science and Technology Department under Grant 202201AU070046, the Scientific Research Fund Project of Yunnan Provincial Department of Education under Grant 2022J0447.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Carvalho, L.; Palma, J.M.; Morais, C.F.; Jayawardhana, B.; Costa, O.L. Gain Scheduled Fault Detection Filter for Markovian Jump Linear System with Nonhomogeneous Markov Chain. Mathematics 2023, 11, 1713. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, J.; Gao, J.; Liu, H. Robust State Estimation for T-S Fuzzy Markov Jump Systems. Mathematics 2023, 11, 487. [Google Scholar] [CrossRef]
- Sun, K.; Wang, Y.; Zhuang, G.; Wang, J. Asynchronous secure controller design for singularly perturbation stochastic semi-Markov jump CPSs with the memory-based dynamic event-triggered scheme against complex cyber-attacks. Communications in Nonlinear Science and Numerical Simulation 2023, 125, 107408. [Google Scholar] [CrossRef]
- Xie, W.; Zeng, Y.; Shi, K.; Wang, X.; Fu, Q. Hybrid event-triggered filtering for nonlinear Markov jump systems with stochastic cyber-attacks. IEEE Access 2020, 9, 248–258. [Google Scholar] [CrossRef]
- Zhang, F.; Hua, M.; Gao, M. Dynamic Output Feedback Quantization Control of a Networked Control System with Dual-Channel Data Packet Loss. Mathematics 2023, 11, 2544. [Google Scholar] [CrossRef]
- Yang, C.; Yao, W.; Wang, Y.; Ai, X. Resilient event-triggered load frequency control for multi-area power system with wind power integrated considering packet losses. IEEE Access 2021, 9, 78784–78798. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Abo-Dief, H.M.; Alanazi, A.K.; Vu, M.T.; Chang, A. Automatic control for time delay markov jump systems under polytopic uncertainties. Mathematics 2022, 10, 187. [Google Scholar] [CrossRef]
- Zhou, Y.; Ji, X. Static Output Feedback Control for Nonlinear Time-Delay Semi-Markov Jump Systems Based on Incremental Quadratic Constraints. Mathematical and Computational Applications 2023, 28, 30. [Google Scholar] [CrossRef]
- Li, H.; Shi, P.; Yao, D. Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults. IEEE Transactions on Automatic Control 2016, 62, 1933–1939. [Google Scholar] [CrossRef]
- Park, P.; Lee, W.I.; Lee, S.Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. Journal of the Franklin Institute 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Su, L.; Ye, D. Observer-based output feedback H∞ control for cyber-physical systems under randomly occurring packet dropout and periodic DoS attacks. ISA transactions 2019, 95, 58–67. [Google Scholar] [CrossRef]
- Lu, R.; Shi, P.; Su, H.; Wu, Z.G.; Lu, J. Synchronization of general chaotic neural networks with nonuniform sampling and packet missing: A switched system approach. IEEE transactions on neural networks and learning systems 2016, 29, 523–533. [Google Scholar] [CrossRef]
- Li, L.; Zhang, G.; Ou, M. A New Method to Non-Fragile Piecewise H∞ Control for Networked Nonlinear Systems With Packet Dropouts. IEEE Access 2020, 8, 196102–196111. [Google Scholar] [CrossRef]
- Qiu, L.; Yao, F.; Zhong, X.; et al. Stability analysis of networked control systems with random time delays and packet dropouts modeled by Markov chains. Journal of Applied Mathematics 2013, 2013. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, S.; Ren, L.; Zhang, L. A new predictive sliding mode control approach for networked control systems with time delay and packet dropout. IEEE Access 2019, 7, 134280–134292. [Google Scholar] [CrossRef]
- Huang, L.; Guo, J.; Li, B. Observer-based dynamic event-triggered robust H∞ control of networked control systems under DoS attacks. IEEE Access 2021, 9, 145626–145637. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Zhang, H. Optimal control for discrete-time NCSs with input delay and Markovian packet losses: Hold-input case. Automatica 2021, 132, 109806. [Google Scholar] [CrossRef]
- Qu, H.; Zhao, J. Stabilisation of switched linear systems under denial of service. IET Control Theory & Applications 2020, 14, 1438–1444. [Google Scholar]
- Chen, H.; Liu, R.; Xia, W.; Li, Z. Event-triggered filtering for delayed Markov jump nonlinear systems with unknown probabilities. Processes 2022, 10, 769. [Google Scholar] [CrossRef]
- Yan, J.; Zhao, S.; Feng, X.; et al. Event-Triggered Quantized Stabilization of Markov Jump Systems under Deception Attacks. Journal of Control Science and Engineering 2023, 2023. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Z.; Ao, W.; Shi, P. Improved Dynamic Event-Triggered Robust Control for Flexible Robotic Arm Systems with Semi-Markov Jump Process. Sensors 2023, 23, 5523. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Shi, T. Static Output Feedback l2-l∞ Asynchronous Control of Markov Jump Systems Under Dynamic Event-Triggered Scheme. IEEE Access 2022, 10, 97748–97757. [Google Scholar] [CrossRef]
- Zhao, N.; Shi, P.; Xing, W. Dynamic event-triggered approach for networked control systems under denial of service attacks. International Journal of Robust and Nonlinear Control 2021, 31, 1774–1795. [Google Scholar] [CrossRef]
Figure 1.
The framework of system (1) under DoS attack and packet loss
Figure 1.
The framework of system (1) under DoS attack and packet loss
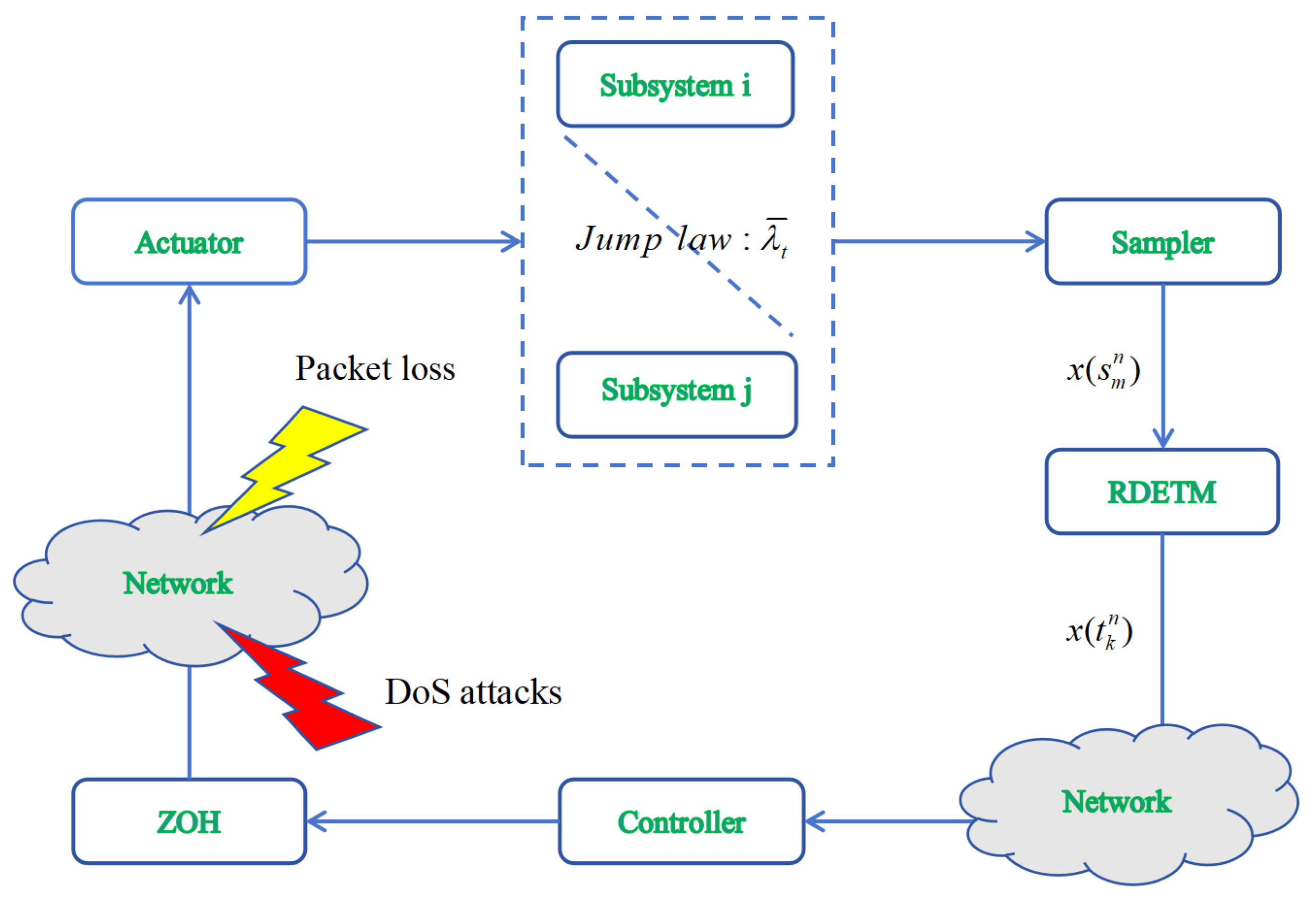
Figure 2.
The state response of system (13) without control.
Figure 2.
The state response of system (13) without control.
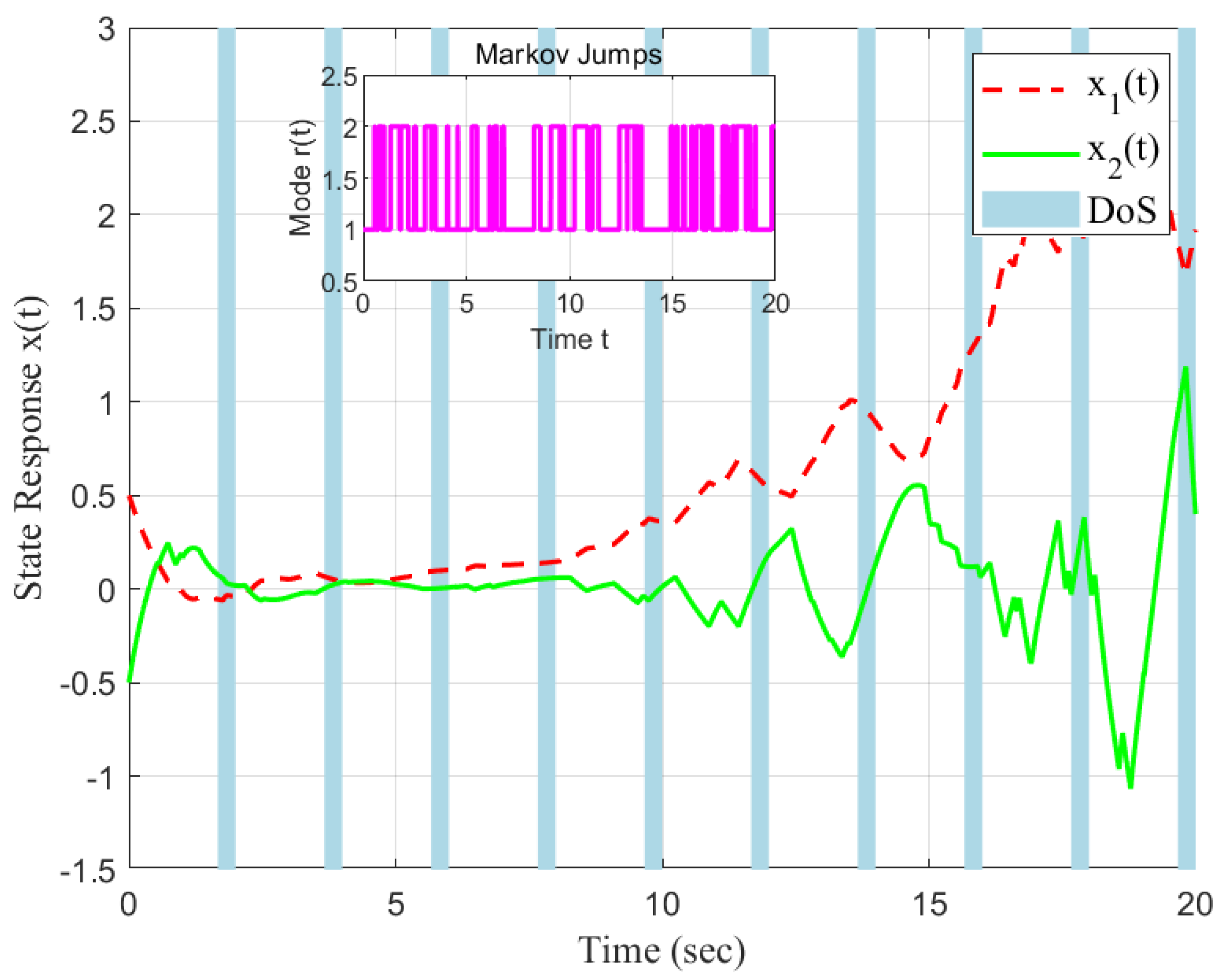
Figure 3.
The state response of system (13) under DETM.
Figure 3.
The state response of system (13) under DETM.
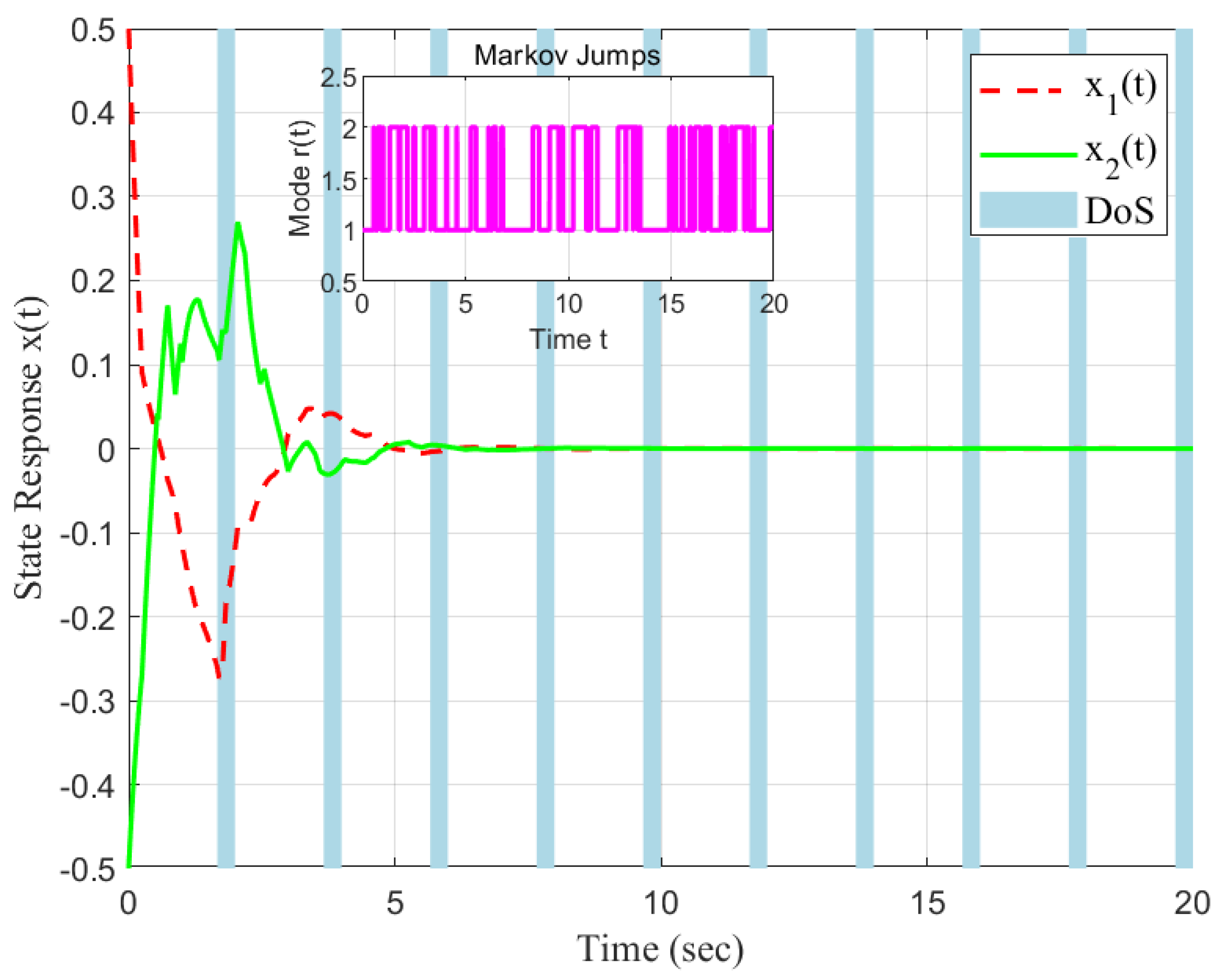
Figure 4.
The control input of system (13) under DETM.
Figure 4.
The control input of system (13) under DETM.
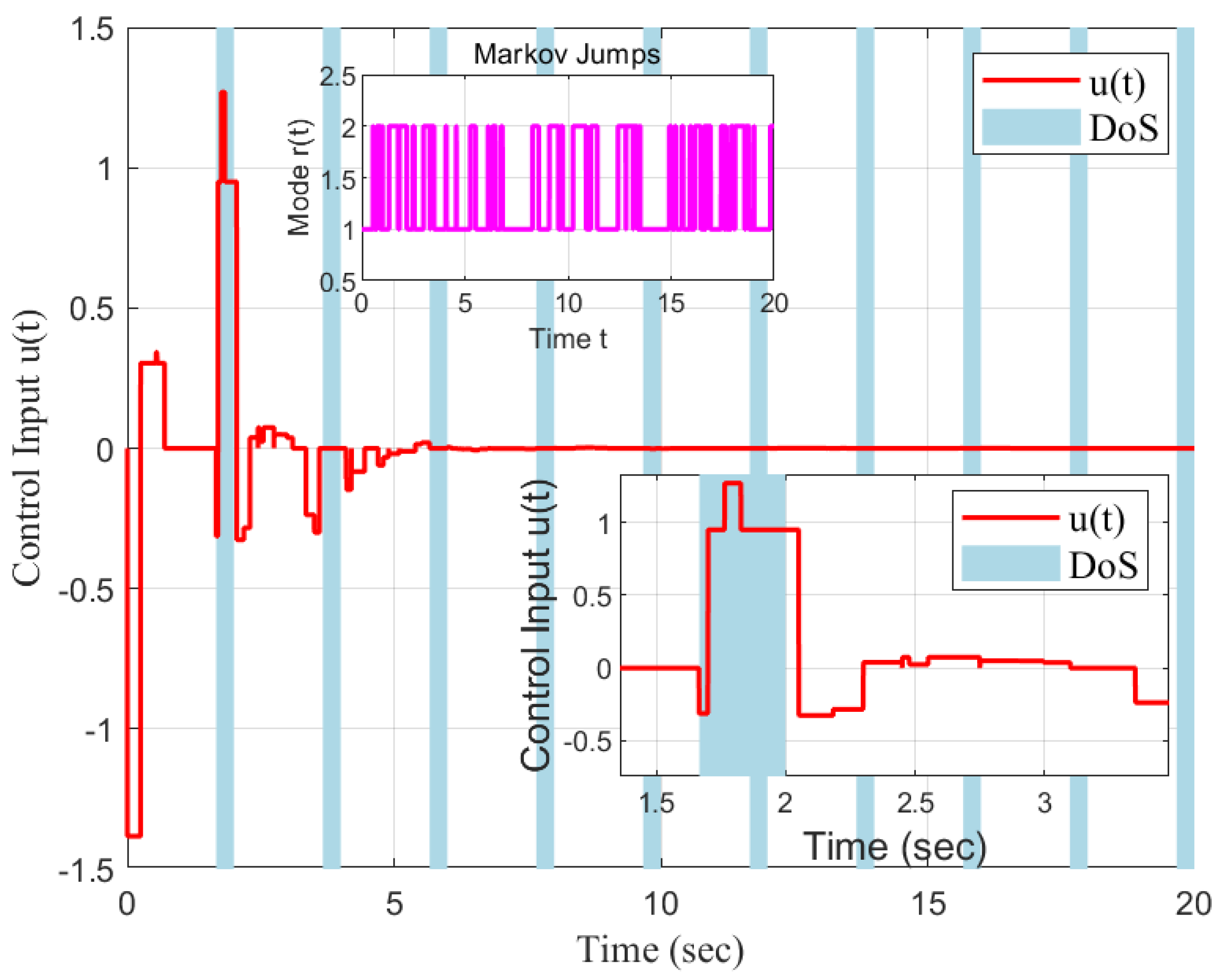
Figure 5.
The dynamic evolution of .
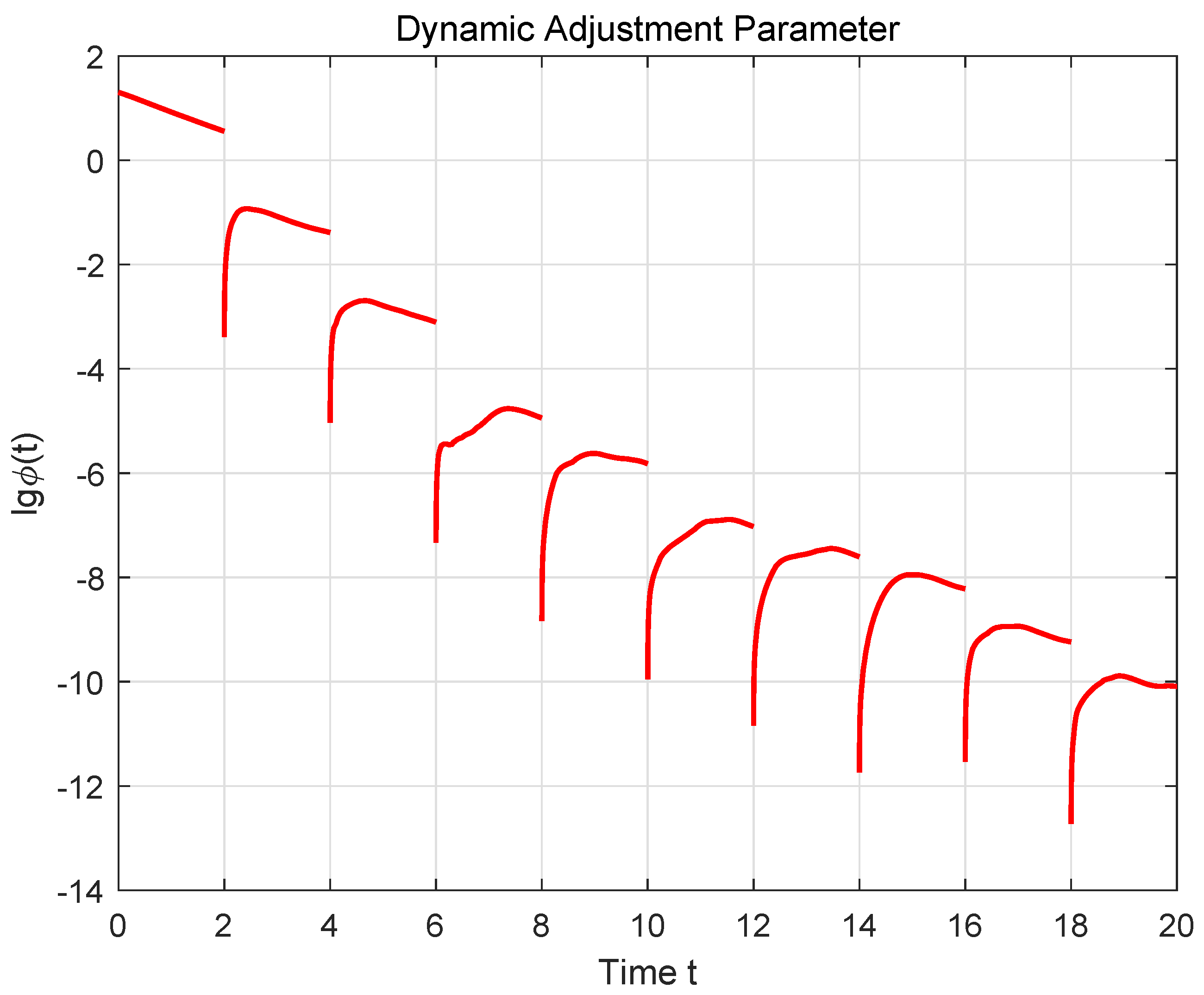
Figure 6.
The release instants and release intervals of DETM.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



