
Submitted:
15 March 2024
Posted:
15 March 2024
You are already at the latest version
Abstract
The Planetary Roller Screw Mechanisms (PRSMs), alongside Ball Screw Mechanisms (BSMs) and Electromechanical Actuators (EMAs), occupies a pivotal role in advancing the precision and efficiency of various industrial applications, including aerospace, automotive, and high-precision machining tools. Despite their critical advantages such as high load capacity, superior precision, and extended lifespan, the deployment of PRSMs in complex operational conditions reveals a landscape rife with challenges and opportunities for further research. This comprehensive review endeavors to dissect the multifaceted aspects of PRSMs, focusing on their mechanics and dynamics, tribology and thermal behavior, and the paramount importance of reliability and condition monitoring. By synthesizing current research findings, this paper highlights the significant advancements in understanding the static and dynamic characteristics of PRSMs, the intricate interplay between lubrication conditions and wear mechanisms, and the critical role of thermal effects on operational performance. Moreover, it delves into the dynamic models that address the impact of manufacturing imperfections, such as waviness and defects, on the reliability of these mechanisms. Despite the strides made, the review identifies critical gaps in the existing literature, particularly under conditions of extreme temperatures, large deformations, and multifaceted loads, advocating for a holistic approach to research. By proposing integrated thermo-mechanical models and emphasizing the need for empirical validations, this paper outlines a roadmap for future studies aimed at facilitating the development of more robust and reliable PRSMs, capable of meeting the demands of complex operational scenarios and advancing the field of high-precision applications in aerospace, robotics, and beyond.
Keywords:
Planetary roller screw mechanism
; Structural mechanics
; Nonlinear dynamics
; Tribological characteristics
; Thermal behavior
; Reliability assessment
1. Introduction
Currently, typical linear mechanisms include gear racks, linear motors, pneumatic cylinders, hydraulic cylinders, BSMs, and PRSMs, as shown in Table 1. In recent years, with the continuous advancement of automation and intelligence in the equipment manufacturing industry, electromechanical servo actuation systems, due to their advantages such as light system weight, high efficiency, and convenient installation and maintenance, have gradually replaced traditional hydraulic and pneumatic servo actuation systems to become the primary choice in the field of servo control [1]. They have been widely applied in aerospace, robotics, automotive, and high-precision machine tools, among other fields. The EMA is the core component of the electromechanical servo actuation system, mainly comprising an electric motor, a reduction gear, and an actuating mechanism. The actuating mechanism, being the heart of the EMA, directly determines its operational performance through its transmission and load-bearing capabilities.
Commonly used actuators in EMAs primarily include BSM and PRSM. Compared to traditional ball screws, PRSM employs multiple threaded rollers instead of balls as rolling elements, as illustrated in Figure 1. Motion and power are transmitted through the multi-point helical surface engagement between the rollers and the screw and nut, allowing PRSM to achieve higher transmission precision, greater load capacity, and longer service life under the same screw diameter compared to ball screws. EMAs utilizing PRSM, in comparison to those using ball screws, exhibit a 30% reduction in weight under the same thrust, and a 50% increase in thrust under the same weight. Moreover, PRSM can employ very small leads, facilitating enhanced control over transmission precision and dynamic response, thus achieving ultra-high precision transmission under heavy-load conditions. Owing to these advantages, PRSM has been applied in critical sectors such as aerospace servo mechanisms [2,3,4], medical devices [5,6], maritime, and automotive [7].
The initial concept of the PRSM was proposed by the Swede, Carl Bruno Strandgren, in 1954. The design featured rollers with annular grooves and no helical angle, belonging to the earliest type of cyclical PRSM [8]. After over a decade of extensive research, Strandgren invented the standard PRSM with rollers that had a helical angle [9]. In 1968, William J. Roantree invented the differential PRSM, which had a segmented roller structure, with both the rollers and the nut threads featuring annular grooves with a zero helical angle [10]. In the year of 1986, Oliver Saari invented the bearing ring PRSM, integrating the designs of the cyclical PRSM and thrust cylindrical roller bearings. This design utilized rollers with annular grooves without a helical angle, and the nut was composed of thrust cylindrical roller bearings and a housing [11].
Over the decades, the PRSM has evolved into various types, mainly categorized into standard, inverted, cyclical, and differential types, with their structures illustrated in Figure 1 (Classification). For the standard PRSM, the rollers have helical teeth at both ends to prevent the roller axes from tilting relative to the screw shaft. This design aims to eliminate the overturning torque caused by the screw's helical angle on the rollers, ensuring that the rollers rotate normally and parallel to the screw shaft. The inverted PRSM differs from the standard PRSM in that the nut serves as the rotational input while the screw provides linear output, and the screw threads at both ends are machined with straight teeth. This configuration is advantageous for integration purposes. The distinctive feature of the cyclical PRSM is its rollers with annular grooves and a zero helical angle, offering benefits such as small lead, high positional accuracy, more engagement points, and greater load capacity. The differential PRSM is characterized by its rollers and nut both having annular grooves without a helical angle, and the rollers are divided into large and small diameter segments. The large diameter segment's grooves engage with the screw threads, while the small diameter segment's grooves engage with the nut grooves, offering advantages in achieving small leads, simplicity in design, and ease of manufacturing.
The evolution of rolling components in mechanical systems, especially in the realms of BSMs, planetary thread roller bearings (PTRBs), EMAs [12], and PRSMs, signifies a leap towards achieving high precision and efficiency in various applications, including aerospace, medical equipment, and robotic actuators. This comprehensive overview delves into the research and developments that have been made to optimize the performance, accuracy, and reliability.
Okwudire [13] improved screw-nut interface model for ball screws, which incorporates the elastic deformation of the screw within the nut, offers a more accurate prediction of natural frequencies for compact and stiff ball screw-nut assemblies, making it quintessential for high-performance applications. Similarly, Okwudire et al. [14] highlight the dynamic coupling between axial, torsional, and lateral dynamics in ball screw drives, challenging the conventional decoupling assumption and providing a more realistic model that impacts the positioning accuracy and fatigue life of the drive significantly. Zhao et al. [15] analyze the load characteristics and coefficient of friction in high-speed angular contact ball bearings (ACBBs), revealing the equilibrium between gyroscopic torque and friction, which is crucial for sustaining axial loads efficiently. Chen et al. [16] investigate the dynamic contact stiffness of double-nut ball screws, presenting a quasi-static method that enhances understanding of high-speed operation impacts, while an explicit model [17] for friction torques in double-nut ball screws aids in precision design by accurately predicting friction, thereby optimizing feed drive parameters.
Innovative contributions by Zheng et al. [18] introduce a novel planetary thread roller bearing that significantly improves load-carrying capacity, marking a substantial advancement for equipment requiring high thrust-to-weight ratios. Ni et al. [19], through a rigorous analysis of deformation coordination, present a model for the contact load distribution of PTRBs, enhancing the understanding of load distribution characteristics crucial for heavy loading mechanisms. Pochettino et al. [20] and Vanthuyne [21] discuss the application of roller screws in space missions, emphasizing the importance of lifetime and lubrication tests for ensuring reliability in vacuum-exposed long missions and the integration of electro-mechanical actuators in the Vega launcher, respectively. Claeyssen et al. [22] explore new actuators for aircraft, space, and military applications, focusing on smart materials and piezoelectric technologies to achieve noise and vibration reduction, highlighting the shift towards electric actuation technologies.
Garrison et al. [23] introduce two-fault tolerant electric actuation systems for space applications, showcasing the potential of electro-mechanical and electro-hydrostatic actuation systems to replace conventional hydraulic systems, while Lepagneul et al. [24], Liu et al. [25], Du et al. [26], Xiao et al. [27], Hu et al. [28], Yao et al. [29,30,31], and Guadagno et al. [32] delve into the optimization, design, and manufacturing processes of PRSMs. Their research addresses the challenges of achieving uniform load distribution, minimizing contact stress, and enhancing the transmission accuracy of these mechanisms, through multi-objective optimization, advanced modeling, and innovative manufacturing techniques. Peng et al. [33], Xu et al. [34], and Wu et al. [35] further contribute to the understanding of PRSMs by focusing on straightening methods for rollers, precision grinding of micro-pitch internal threads, and the relationship between machining errors and transmission accuracy. These studies not only advance the precision and reliability of PRSMs but also open new avenues for their application in various fields.
Ball screw feed-drive systems (BSFDS) are renowned for their precision in micron-scale positioning and motion trajectory control. Recent literature has explored identification, linear parameter varying models, thermal error modeling, and various control approaches, including nonlinear and robust control methods [36]. The nonlinear characteristics of rolling kinematic joints, which significantly influence prediction accuracy and efficiency, have been the subject of extensive theoretical modeling. This includes efforts to replicate nonlinear static and dynamic behaviors and propose analytical modeling approaches for feed drives [37].
The transition towards More/All Electric aircraft systems [38], has spurred the development of EMAs as alternatives to conventional hydraulic systems. The literature reviews the configuration, advantages, limitations, and testing systems of EMAs, identifying key technologies and research challenges such as fault-tolerant motors and thermal management [39]. PRSMs, as a newer class of actuators, have garnered attention for their high performance in EMA systems. Reviews have systematically examined the structure, advantages, limitations, and applications of various PRSM types [40], and the development of multi-pair dynamic contact and multi-body vibration system models [41]. The review on transmission characteristics [42] explores the kinematic, load-bearing, and dynamic models developed to understand PRSMs' behavior, emphasizing the need for integrated model research that considers detailed nonlinear joints and multi-physics parameters for high-fidelity mechanical modeling.
In conclusion, while significant advancements have been made in the modeling and control of precision transmission mechanisms, the complex operating conditions of PRSMs present unique challenges that require further investigation. This review underscores the necessity for comprehensive models that accurately reflect the transmission characteristics of PRSMs under various conditions, paving the way for advancements in intelligent manufacturing and aerospace technology.
2. Mechanics and Dynamics
In the intricate realm of PRSMs and BSMs, the investigation of mechanics and dynamics stands as a cornerstone for advancing operational efficiency and reliability. This domain, rich with complexity due to the interplay of static load distribution, axial stiffness, contact kinematics, and nonlinear dynamics, has been the focus of extensive research aimed at unraveling the multifaceted performance characteristics underpinning these mechanisms. The pursuit of understanding in this field is driven by the imperative to mitigate errors, enhance design methodologies, and ensure precision across varied operational conditions.
2.1. Static Load Distribution and Axial Stiffness
The study of static load distribution and axial stiffness [43] within PRSMs, as presented in Table 2, represents a critical area of research, underpinning advancements in mechanical design and optimization for enhanced operational efficiency. A collection of seminal works has significantly propelled our understanding in this domain, addressing the intricacies of PRSM performance, the mitigation of errors, and avenues for design refinement [44].
Initially, Ma et al. [45] established a foundational model assessing transmission accuracy within PRSMs. Their work elucidated the critical role of manufacturing and assembly errors, emphasizing the importance of accounting for elastic deformations to ensure precision and reliability during operation. Complementing this, Zhang et al. [46] explored the dynamics of load distribution over threads in the presence of pitch deviation, uncovering how such machining errors disproportionately affect the mechanism's load handling and overall efficiency. Expanding on these insights, Du et al. [47] employed a fractal model to analyze the impact of surface roughness and friction factors on load distribution and axial stiffness. This approach unveiled the micro-to-macro linkages in PRSM performance, offering strategies for design optimization [48]. Similarly, as shown in Figure 3, Fu et al.'s [49] introduction of a multi-roller static model that contemplates load sharing amidst axial loads and errors further delineated the sensitivity of load distribution to component positioning and the critical influence of thread index errors on system stiffness.
Empirical validation of theoretical models was provided by Ma et al. [43], who conducted experiments to investigate PRSM static stiffness. Their findings corroborated analytical predictions, solidifying the models' utility in foreseeing PRSM behavior under varied conditions. In a novel approach, Hu et al. [50] harnessed both analytical calculations and machine learning to dissect the complex relationship between machining errors and load distribution among rollers, demonstrating the potential of computational techniques in optimizing PRSM design. In pursuit of uniform load distribution, Zhang et al. [51] recommended a series of design modifications aimed at enhancing load uniformity across threads. This strategy involves recalibrating thread form parameters and adjusting contact dynamics to mitigate axial deformation. Additional contributions from Abevi et al [52,53]. and Jones and Velinsky [54] on the static analysis of inverted mechanisms and the application of the direct stiffness method, respectively, have enriched the discourse on PRSM design, providing fresh perspectives on load distribution and system stiffness under varying operational states.

Table 2.
Conclusions of load distribution modelling techniques.
| Scholar | Method | Merits | Applications |
| Ma et al. [45] | Load deformation model for transmission accuracy | Highlights importance of accounting for elastic deformations for precision and reliability | Enhancing operational accuracy in PRSMs |
| Zhang et al. [46] | Load distribution over threads with pitch deviation | Unveils how pitch deviation affects load distribution and wear depth | Design optimization to mitigate machining errors |
| Du et al. [47] | Fractal model for surface roughness and axial stiffness | Links micro-to-macro performance aspects, offering optimization strategies | Improving load distribution and axial stiffness in PRSMs |
| Fu et al. [49] | Multi-roller static model | Delineates sensitivity of load distribution to component positioning | Enhancing system stiffness and precision |
| Ma et al. [43] | Empirical validation of static stiffness | Corroborates analytical predictions with experimental data | Predicting PRSM behavior under varied conditions |
| Hu et al. [50] | Analytical calculations and machine learning | Demonstrates computational techniques in optimizing PRSM design | Optimizing design for better load distribution among rollers |
| Zhang et al. [51] | Design modifications for uniform load distribution | Recommends recalibrating thread parameters to mitigate axial deformation | Enhancing load uniformity across threads |
| Abevi et al. [52,53] | Static analysis with bars, beams, and nonlinear springs | Provides fresh perspectives on load distribution modelling and system stiffness | Enriching the discourse on PRSM bending behavior |
| Jones and Velinsky [54] | Application of the direct stiffness method | Enables analytical prediction of overall stiffness and load distribution across thread | Advancing optimization of stiffer PRSMs with lower stress |
2.2. Contact Kinematics
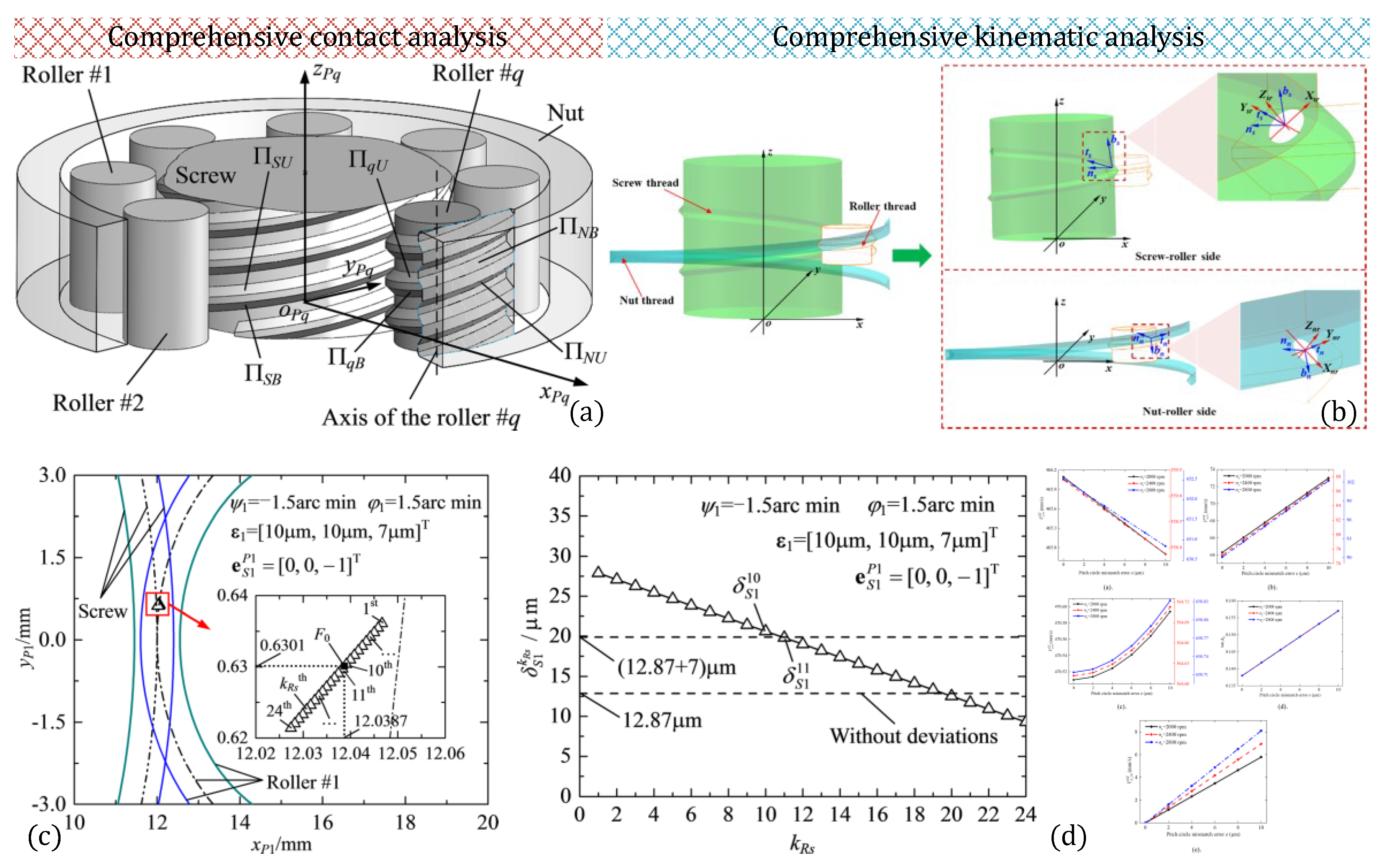
In the realm of precision engineering, the contact kinematics of PRSMs stands as a pivotal area of study, given its profound impact on the performance, efficiency, and reliability of these mechanisms across various industrial applications. This review endeavors to encapsulate the essence and findings from a comprehensive array of researches, each contributing unique insights into the nuances of PRSM contact kinematics. Wang et al. [55] and Fu et al. [56] lay foundational work in kinematic modeling [57] and contact analysis, addressing the critical influence of runout errors, elastic deformation, and the precise calculation of contact positions and clearances which is displayed in Figure 3. These studies underscore the necessity of sophisticated mathematical models to predict the kinematic characteristics and relationships within PRSMs accurately, facilitating enhanced design and reliability in mechanical systems. The exploration by Hojjat and Agheli [58] into the slip tendency within roller screws illuminates the operational limits and capabilities of PRSMs, offering a detailed examination of factors affecting motion accuracy and the optimization of thread profiles for improved performance.
Xing et al. [59] contribute significantly with their contact kinematic model, focusing on sliding velocities and the impact of pitch circle mismatch error. This work is pivotal in understanding the operational nuances of PRSMs and guiding the design parameters to mitigate adverse effects on performance. The investigations by Sandu et al. [60] into roller screw thread geometry and the analytical prediction of contact ellipses [61] provide a deep dive into the mechanics of threaded contact areas. These studies are instrumental in refining the design process for roller screws, aiming at improved stiffness and reduced contact stresses. Velinsky et al. [62] and Mamaev et al. [63] delve into the efficiency analysis and harmonic analysis of kinematic errors, respectively. These works highlight the critical aspects of slip patterns and the significance of minimizing kinematic errors through precise manufacturing and operational practices.
Figure 4.
Contact kinematics of PRSM with consideration of errors (a) Enlarged view of the threads [56] (b) Coordinate transformation in the contact region [59] (c) Contact positions and clearances along axial direction (d) Effects of rotational speed on the sliding velocity.
Acharyaa and Venkatarama [64], along with Velinsky et al. [65], focus on the kinematic analysis and thread profile modification, alongside efficiency analysis, to enhance the accuracy and performance of PRSMs. These contributions are vital for the development of high-precision machine tools and applications requiring meticulous motion control. The studies by Ma et al. [66] and Jones et al. [67] on the helical directions of screw and roller threads and the kinematics of roller migration, respectively, shed light on the complex interactions within PRSMs that can affect transmission accuracy and lead to potential mechanism failure. Lastly, Liu et al. [25] explore the meshing performance of PRSMs with different roller thread shapes, offering insights into optimizing meshing characteristics for enhanced transmission speeds and extended operational life.
2.3. Nonlinear Dynamics
The exploration of nonlinear dynamics [68] in PRSMs and BSMs has been a focal point of recent research, aiming to enhance the understanding of their operational behaviors under various loading and motion conditions. This review synthesizes the contributions from a selection of studies that delve into the dynamic equations of motion, nonlinear modeling, and the implications of these dynamics on the performance and reliability of PRSMs and BSMs [69]. Jones et al. [70] develop dynamic equations for PRSM, incorporating linear and angular velocities, accelerations, and the slip velocities at contacts. This foundational work enables a comprehensive simulation of PRSM dynamics, facilitating improved system design. Similarly, Fu et al. [71,72] propose dynamic models for PRSM that account for the nonlinear six degrees of freedom and internal forces, employing Lagrange’s method and Newton’s second law for a detailed force analysis, as shown in Figure 5. The work by Fu et al. [72] stands out by offering an efficient method for dynamic analysis of PRSM, significantly reducing computational resources while maintaining accuracy. This advancement is crucial for the practical application of dynamic models in the design and optimization of PRSM systems. Guo et al. [73] introduce a novel approach by integrating theoretical derivations with deep learning to predict the dynamics of feed drives, highlighting the potential of machine learning techniques in refining dynamic models for enhanced precision and reduced errors.
Liu et al. [74] present a comprehensive analysis of the coupled feed system dynamics, considering the assembly error of guide rails. This study emphasizes the importance of accounting for manufacturing and assembly imperfections in dynamic models to predict real-world behavior accurately. Xu et al. [75] and Fu et al. [76] contribute to the understanding of nonlinear dynamics in PRSM and BSM by considering elastic deformations and the characteristics of rolling joints. These models offer insights into the complex interactions among components under load, providing a basis for optimizing design for reliability and performance. Wu et al. [77] develop a bending-torsional coupling dynamic model to analyze vibration characteristics of PRSM, offering a detailed view of the natural vibration modes and their dependencies on structural parameters. This research is pivotal in identifying and mitigating potential vibrational issues in PRSM applications.
Miao et al. [78] and Yang et al. [79] explore the nonlinear dynamics of kinematic joints in column-spindle systems and BSFDS under thermal deformation, respectively. These studies underscore the significant impact of nonlinear joint characteristics and thermal effects on the dynamic behavior and machining accuracy. Liu et al. [80] focus on the nonlinear dynamic analysis of a variable lead preloaded single nut ball screw, considering the variation of working parameters. This research highlights the sensitivity of dynamic behavior to operational and design parameters, guiding the development of more robust and adaptable screw mechanisms. The research on the nonlinear dynamics of PRSMs and BSMs provides a comprehensive framework for understanding the complex behaviors of these mechanisms under a wide range of conditions by leveraging advanced modeling techniques, including deep learning and consideration for the effects of nonlinearities, assembly errors, and thermal deformations.
3. Tribology and Thermal Behavior
The intricate interplay between tribology and thermal behavior in PRSMs and BSMs, is a cornerstone for ensuring the longevity, efficiency, and reliability of these critical components. Recent advancements in the study of elastohydrodynamic lubrication (EHL), surface friction, wear phenomena, and the comprehensive understanding of thermal effects have significantly contributed to optimizing these mechanisms for a wide array of applications. From enhancing lubrication strategies to mitigating wear and precision loss, and addressing the challenges posed by thermal expansion and mechanical coupling, researchers have paved the way for more durable, efficient, and precise mechanical systems.
3.1. Elastohydrodynamic Lubrication
The study of EHL in PRSMs has seen significant advancements, focusing on understanding the complex interactions between mechanical loads, surface roughness, and lubrication conditions under various operational scenarios. This review synthesizes insights from recent research, highlighting the critical aspects of mixed-lubrication analysis, the impact of eccentric errors, and the application of dynamic models for lubrication condition identification in PRSMs.
Xie et al. [81] proposed a mixed-lubrication model for PRSMs that considers contact load, thread geometry, surface roughness, and transient effects. Their findings indicate that increasing the rotational speed significantly improves lubrication in contact areas, transitioning from mixed to full-film lubrication, which is illustrated in Figure 6. Conversely, increased loads lead to reduced film thickness and elevated friction coefficients, underscoring the importance of high-precision machining to enhance lubrication by minimizing surface roughness. Zhou et al. [82] delved into transient mixed EHL in PRSMs, addressing the uneven friction distribution and the influence of helix angles on lubrication properties. Their transient mixed-EHL model, which accounts for real three-dimensional machined roughness and arbitrary entrainment velocity, reveals that smaller helix angles and higher rotating speeds can improve lubrication performance, especially during frequent startup and shutdown processes. Xing et al. [83] investigated the lubrication characteristics of PRSMs with eccentric errors, deriving formulas for entrainment velocities affected by these errors. Their analysis shows that eccentric errors significantly impact the lubrication characteristics, with the film thickness of screw-roller thread pairs being larger than that of nut-roller pairs. This study emphasizes the crucial role of addressing eccentric errors in optimizing the lubrication performance of PRSMs.
Cai et al. [84] introduced a dynamic separable convolution residual convolutional neural network (DSC-RCNN) for identifying the lubrication condition of PRSMs. Their innovative approach, which combines depthwise separable convolution with dynamic convolution, demonstrates superior recognition and transfer learning abilities, offering a promising tool for real-time monitoring and optimization of lubrication conditions in industrial applications. In conclusion, the research on EHL in PRSMs underscores the complexity of achieving optimal lubrication conditions, influenced by factors such as rotational speed, axial load, surface roughness, eccentric errors, and transient operational behaviors. The advancements in modeling and analysis provide valuable insights for designing more reliable and efficient PRSMs, with implications for the broader field of mechanical systems lubrication.
3.2. Surface Friction, Thread Wear and Precision Loss
The evolution of mechanical transmission systems, particularly focusing on the friction, surface wear, and precision loss in PRSMs and BSMs, has been a subject of extensive research due to their critical roles in precision machinery and automation. This review encapsulates the findings from a series of studies, offering a comprehensive overview of the advancements in understanding and addressing the challenges associated with these mechanisms.
The investigation into PRSMs has been significantly advanced by Ma et al. [87], who explored the static contact with friction between threaded surfaces, highlighting the sliding and rolling contact modes at different interfaces. Aurégan et al. [85,88] further contributed by examining the rolling-sliding contact, as demonstrated in Figure 7, revealing rapid adhesive wear under insufficient lubrication and the importance of proper lubrication to mitigate wear. Meng et al. [89] introduced a multiscale adhesive wear model considering thread surface roughness, providing insights into the wear characteristics and their impact on PRSM's performance. Meng et al. [90] also explored the contact and wear characteristics under screw misalignments, indicating that misalignments significantly affect wear, potentially leading to accuracy degradation. Ma et al. [91] and Xing et al. [86] developed wear prediction models that underscore the importance of understanding the wear mechanisms for optimizing PRSM design and operation.
Oh et al. [17] formulated an explicit friction torque model for double-nut ball screws, emphasizing the role of preload selection in achieving smoother operation under high axial loads. This model serves as a foundation for optimizing ball screw design for enhanced performance. Cheng et al. [92] analyzed BSM accuracy degradation under time-varying conditions, introducing a wear prediction model that accounts for dynamic fluctuations in operational parameters. Zhao et al. [93] and Liu et al. [94] furthered this line of research by examining the precision sustainability and loss modeling in BSMs, focusing on the effects of raceway wear and the multiscale contact mechanics between balls and screw grooves. Zhou et al. [95,96] explored preload degradation mechanisms in double-nut ball screws, proposing models to predict preload degradation accurately. Their work, validated through experimental analysis, highlights the criticality of understanding preload degradation for maintaining BSM accuracy. Zhou et al. [97] also characterized wear on raceway surface profiles, employing a combination of statistical parameters, recurrence analysis, and fractal dimension to predict wear states, offering a novel approach to monitoring and predicting ball screw wear.
3.3. Friction Torque, Power Loss and Transmission Efficiency
The study of friction torque, power loss, and transmission efficiency in mechanical systems, particularly in PRSMs and related components like PTRBs and ACBBs, is crucial for optimizing the performance and efficiency of EMAs and other precision machinery. This review synthesizes findings from recent research, offering insights into the mechanisms of friction, strategies for minimizing power losses, and methods to enhance transmission efficiency.
The analysis of friction torque [98] is pivotal in understanding the operational efficiency of mechanical systems. Gan et al. [99] and Liu et al. [100] have made significant contributions in this area by analyzing the frictional moments in PRSMs and PTRBs, respectively. Gan et al. utilized Hertzian contact theory to dissect the frictional moment caused by elastic hysteresis, roller’s spinning sliding, and differential sliding, considering the load distribution of roller threads. Their findings indicate that elastic hysteresis is the primary contributor to the total frictional moment. Liu et al. developed a mathematical model to predict PTRB friction torque, emphasizing the effects of rotating speed and external load on friction torque. Their experimental validation underlines the model's accuracy across a range of operational conditions.
Power loss in mechanical systems, particularly in ACBBs and EMAs, has been the focus of studies by Popescu et al. [101] and Fu et al. [102]. Popescu et al. proposed original models to calculate power losses in ACBBs, identifying the pure rolling lines and defining the angular and orbital speeds of the balls. Their approach, validated against experimental data, provides a comprehensive understanding of friction torque and power dissipation. Fu et al. addressed virtual prototyping of EMAs using the Bond-Graph formalism, proposing new approaches for thermal balance analysis, fault response, and energy consumption, with a special focus on friction and compliance of mechanical transmission.
Transmission efficiency is directly influenced by friction torque and power loss, Velinsky et al. [62] and Zheng et al. [103] explored this theme within the context of PRSMs. In Figure 8, Velinsky et al. conducted a kinematic and efficiency analysis of PRSMs, comparing their performance with conventional BSMs. Their analysis revealed that slip always occurs in PRSMs, affecting their transmission efficiency. Zheng et al. proposed a method for detecting the transmission accuracy and efficiency of PRSM pairs, utilizing a high-precision test setup to collect and analyze data, thereby enhancing the understanding of PRSM performance under various load conditions.
3.4. Temperature Rises and Thermal Mechanical Coupling
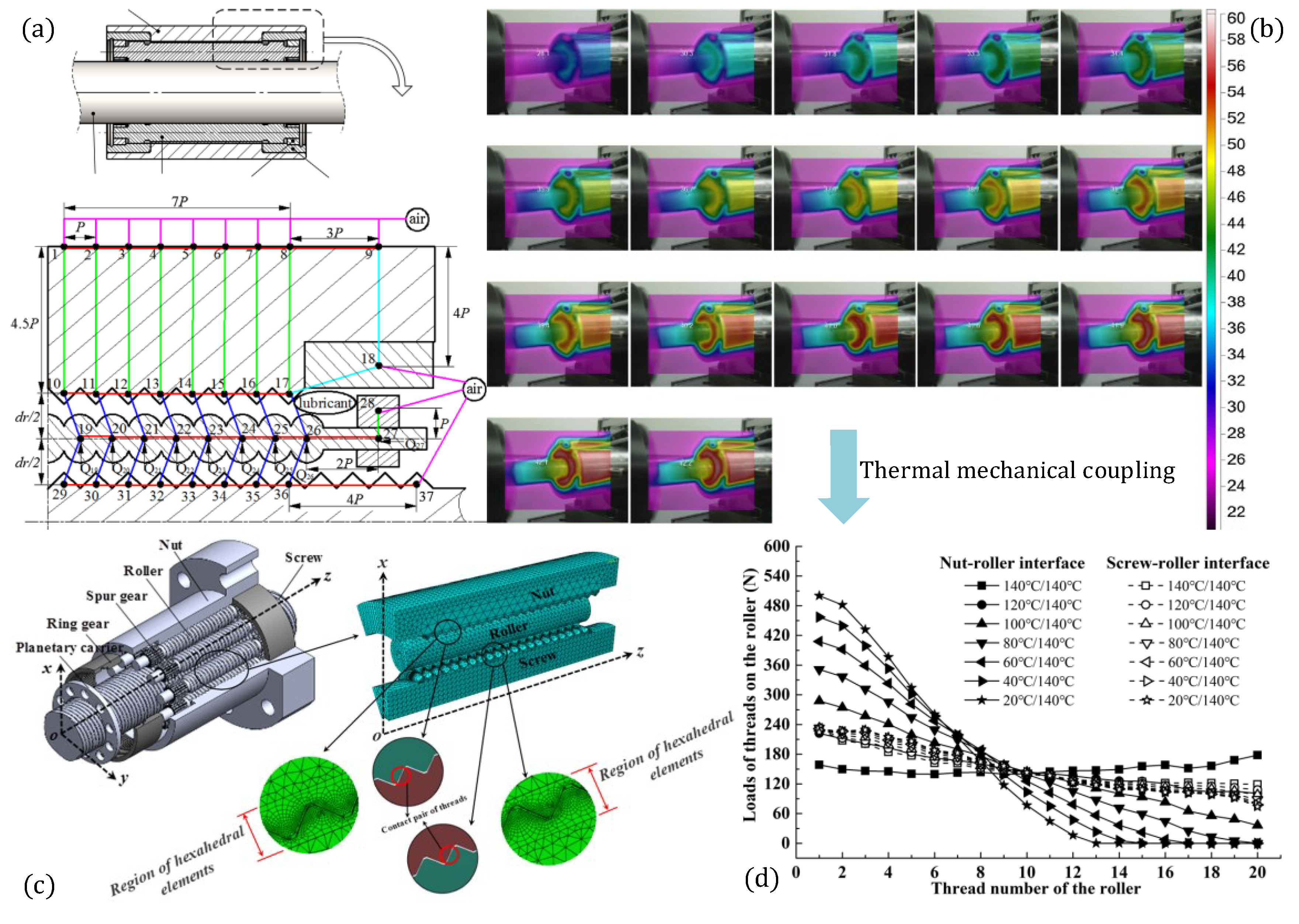
The thermal behavior of mechanical systems, including planetary roller screws [104] depicted in Figure 9, ball screws, and machine tool spindle feed systems, significantly influences their performance, precision, and reliability. This comprehensive review delves into various studies focusing on thermal effects, thermal-mechanical coupling, and strategies for mitigating thermal-induced errors in these systems.
The adaptation of planetary roller screws for cryogenic applications, as explored by Lizon [105], highlights their reliability and safety in extreme temperatures. This study underscores the versatility of planetary roller screws in transforming rotational motion into linear motion, crucial for infrared instruments operating at cryogenic temperatures. Du et al. [106] conducted a transient thermal analysis of standard planetary roller screws, considering moving heat sources to understand temperature distribution and rise. Their findings, corroborated by experimental data, affirm the model's validity in capturing the thermal behavior of planetary roller screws. Ma et al. [107] focused on predicting frictional heat in planetary roller screws, considering load distribution and the impact of structural parameters on thermal behavior. Their work lays a theoretical foundation for designing roller screws with lower frictional moments and higher transmission efficiency. Ma et al. also [108] utilized three-dimensional finite element analysis to evaluate the load distribution of planetary roller screws under thermo-mechanical coupling. Their analysis reveals the significance of installation modes and temperature conditions on load distribution, highlighting the necessity of considering thermal effects in design and optimization processes.
Figure 9.
Thermal mechanical behavior of PRSM (a) Thermal network model of the PRSM [104] (b) Thermal image of the nut and screw (c) Finite element model of thermal-mechanical coupling [108] (d) Load distribution with varying external temperature.
Zhang et al. [109] delved into the thermal elongation of ball screws, emphasizing the impact of rotational speeds on temperature changes and, consequently, on positional accuracy. Their methodological approach to calculating temperature rise offers insights into managing thermal effects for enhanced precision in numerical control machines. Wang et al. [110] addressed the thermal performance of ball screws, establishing models to predict temperature fields and thermal errors. Their approach, integrating dynamic boundary condition changes, offers a pathway to mitigate thermal-induced variations in friction torque and stiffness. Li et al. [111] developed a real-time thermo-mechanical dynamics model for ball screw systems, incorporating dynamic thermal network models to assess transient temperature fields. This model elucidates the interplay between thermal deformation and preload variations, offering insights into optimizing system performance under thermal loads. Redmond et al. [112] reviewed static ball bearing thermal conductance, developing correlations that facilitate understanding the thermal behavior across various bearing sizes. This work is pivotal for engineers estimating static bearing thermal conductance in vacuum and atmospheric conditions.
Additional research has explored thermal-mechanical coupling effects in various mechanical systems. Cheng et al. [113] have proposed an integrated thermo-mechanical coupling model for the actuating mechanism in high-speed presses, emphasizing the importance of considering thermal effects for manufacturing precision. Similarly, Ju et al. [114] have investigated thermal error suppression methods in cylindrical giant magnetostrictive actuators, proposing oil cooling systems to control temperature and improve output accuracy. These studies highlight the broader implications of thermal effects on mechanical system performance and the necessity of incorporating thermal-mechanical coupling analyses into the design and optimization of precision machinery.
4. Reliability and Condition Monitoring
The realm of mechanical engineering has increasingly recognized the paramount importance of reliability and condition monitoring in ensuring the optimal performance and longevity of critical components such as PRSMs, BSMs, and their associated bearings. With the advent of sophisticated manufacturing techniques, the potential for imperfections such as waviness, defects, and the inevitable wear and tear over operational lifetimes has necessitated a deeper exploration into dynamic models, fatigue analysis, and advanced diagnostic methodologies.
4.1. Waviness, Defect Faults and Reliability Assessments
PRSMs are critical in high-precision applications due to their high load capacity and accuracy. However, their performance can be compromised by manufacturing imperfections such as waviness and defects on the surface of their components. Similar issues affect ball screws and bearings, which are integral to the operation of various mechanical and electromechanical systems. Understanding the dynamic effects of these imperfections and developing methods for their analysis and mitigation is crucial for improving the reliability of these systems.
Recent studies have developed advanced dynamic models to analyze the effects of surface waviness and defects on the vibration characteristics of mechanical components. Liu et al. [115,116,117,118] introduced models that consider both time-varying displacement and contact stiffness excitations due to uniform and nonuniform waviness in lubricated bearings. These models provide a more accurate description of the vibrations induced by surface imperfections, highlighting the importance of considering the lubrication film in mitigating the adverse effects of waviness. The friction moment in ACBBs, a critical factor in their operational efficiency and lifespan, is also affected by surface waviness [119].
In addition to waviness, the coupling of manufacturing errors such as roundness and waviness has been shown to significantly influence the vibration behavior of ACBBs. Liu et al. [120] proposed a time-varying calculation method that accounts for the variations in contact forces due to waviness, offering insights into the design and maintenance strategies for minimizing friction-related losses and wear. The comprehensive approach to modeling acknowledges the complex nature of real-world imperfections and their impact on system dynamics. Experimental studies and finite element analyses have validated the theoretical models, confirming the significant effects of surface imperfections on the dynamic characteristics of mechanical systems [121]. These studies underscore the necessity of incorporating realistic defect and waviness models in the design and analysis of mechanical components. Yin et al. [122] focused on the dynamic modeling and analysis of ball screw pairs with nut spalling faults in EMAs. Their work emphasizes the need for condition monitoring and fault diagnosis in maintaining the reliability of electromechanical systems.
Optimization techniques have been applied to improve the reliability of PRSMs by adjusting design parameters to mitigate the effects of uncertainties [123] (see Figure 10). This proactive approach to design and optimization underscores the potential for significant improvements in the performance and reliability of mechanical systems through careful consideration of surface imperfections and their effects. Cai et al. [125] studied the jamming mechanisms of PRSMs, contributing to the understanding of potential failure modes and guiding the development of more reliable screw mechanisms. Du et al. [124] explored the time-varying contact characteristics of the PRSM considering nonuniform surface waviness. The circumferential surface waviness can be written as:
where, the subscript i and js are the ith wave and the jsth screw thread, respectively.is the total circumferential waviness number in any segment. is the circumferential waviness amplitude. And the axial surface waviness is defined by:
where is the total waviness number of the jsth screw thread in the axial direction. is the axial waviness amplitude of the screw thread raceway. From this prospective, the contact clearances and contact forces over thread teeth would be time-varying due to the nonuniform surface waviness excitation. In conclusion, their study provides valuable insights into the design and optimization of PRSMs for enhanced performance and reliability.
4.2. Fatigue, Surface Fracture and Failure Lifetime
The fatigue, surface fracture, and failure lifetime of bearings [126], PRSMs, and BSMs are critical factors that determine their operational reliability and lifespan. Recent studies have delved into various aspects of these phenomena, including the effects of material inhomogeneities, dimension errors, lubrication conditions, and microstructural alterations on the fatigue life and failure mechanisms of these components. This review synthesizes the findings from recent research to provide insights into the current state of knowledge in this field.
Moreira et al. [127] conducted a computational evaluation of Tirefond screws used in railroad fastenings to understand recurrent failure cases. Their finite element method (FEM) analysis identified critical stress concentration points, guiding the proposal of material and geometric modifications to enhance fatigue performance. Similarly, Kraemer et al. [128] explored the fatigue properties of metric steel screws, revealing how pre-load and nut type affect load capacity and fatigue life. Wang et al. [129] and Kim et al. [130] further contributed to the understanding of failure mechanisms in screw compressors and electro-mechanical actuators, respectively, through detailed failure analysis and evaluation based on certification standards.
Li et al. [[133] proposed a damage-mechanics-based model for rolling contact fatigue analysis in cylindrical roller bearings, incorporating a new damage evolution equation. This model facilitates the simulation of crack initiation, propagation, and spalling, offering a comprehensive view of fatigue mechanisms at the microscale. Laithy et al. [126] and Halme at al. [134] reviewed microstructural alterations in bearings under rolling contact fatigue, highlighting the formation of dark etching regions and white etching bands as critical factors in bearing failure. Vijay et al. [135], and Li et al. [136] utilized crystal plasticity and cohesive element models to study rolling contact fatigue in bearing steels, emphasizing the role of microstructural inhomogeneity in fatigue crack initiation and growth.
Raje et al. [137] introduced a numerical model that simulates the material randomness inherent in rolling element bearings to predict the scatter in fatigue lives. Their model incorporates both topological randomness and material property variations, offering a deeper understanding of the physical mechanisms behind fatigue life dispersion. This approach aligns with the findings of Zhen et al. [132], who considered the dimension errors of balls in ball screws as suggested in Figure 11, showing how such errors influence contact stress and, consequently, fatigue life. Zhao et al. [138] focused on the preload double-nut ball screw under mixed lubrication, establishing a model that accounts for the non-Newtonian effect of lubricants on fatigue life. Their work underscores the significance of lubrication conditions in determining the fatigue life of ball screws, a theme that resonates with the broader understanding of fatigue mechanisms in mechanical components.
Lepagneul et al. [131] proposed a fatigue design strategy for PRSMs, combining Hertz contact models with multi-axial fatigue criteria. Their approach enables precise prediction of PRSM fatigue lifespan under cyclic loads, a crucial aspect for their application in aeronautical conditions. Liu et al. [139] introduced a tolerance optimization method driven by transmission accuracy, axial backlash, and fatigue life for PRSMs. This method effectively balances performance risk and operational reliability, highlighting the interconnectedness of design parameters and fatigue life. The fatigue life, surface fracture, and failure lifetime of mechanical components are influenced by a complex interplay of material properties, geometric and dimension errors, lubrication conditions, and microstructural alterations.
4.3. Health Condition Monitoring and Fault Diagnosis
The advancement in health condition monitoring and fault diagnosis in mechanical systems, particularly those involving bearings, BSMs, EMAs, and PRSMs [140], has become a focal point of recent research. These components are critical for the precision, efficiency, and reliability of various applications ranging from industrial machinery to aerospace flight control systems. The integration of data-driven techniques, model-based approaches, and the utilization of digital twins has significantly enhanced the ability to predict, detect, and diagnose faults within these systems, ensuring operational safety and extending the lifespan of machinery.
The diagnostic methodologies for bearings and ball screws are witnessing revolutionary changes, primarily driven by the integration of advanced computational techniques. For instance, the utilization of non-parallel bounded support matrix machines (NPBSMM) by Pan et al. [141] addresses the challenges presented by outliers and high-dimensional data in SVM applications, proving especially beneficial for roller bearing fault diagnosis. Concurrently, Zhang et al. [142] illustrate the efficacy of digital twins in bridging the gap between simulated and real-world datasets, particularly under scenarios of insufficient training data for rolling bearing fault diagnosis. The exploration of needle roller bearings by Shi et al. [143] through a novel test rig has shed light on the dynamics of roller-cage impacts, offering insights into the causative factors behind cage fractures. Similarly, the shift-invariant sparse filtering (SISF) method proposed by Wang et al. [144] signifies a leap in sparse learning applications for fault signal detection amidst substantial background noise. In the context of rotating machinery operating under variable speeds, Liu et al. [145] provide a comprehensive review of fault diagnosis methods, underscoring the necessity of innovative approaches to tackle the complexities posed by nonstationary conditions.
The advancements in ball screw diagnostics are exemplified by Zhang et al. [146] through an instance-based ensemble deep transfer learning network (IEDT), which leverages auxiliary data from related domains to overcome the challenge of limited labeled data in target domains. The integration of preload and precision parameters into a novel index for wear degradation prediction by Zhang et al. [147] and the systematic methodology for ball screw prognosability by Li et al. [148] underscore the criticality of early diagnostics in machinery maintenance. Techniques developed by Han et al. [149] for long-range running ball screw machines emphasize the significance of monitoring lubrication conditions to forestall premature failures. The intelligent hybrid scheme for fault identification in industrial ball screw linear motion systems introduced by Riaz et al. [150], alongside the condition-based classification of hollow ball screws using SVM by Huang et al. [151], showcases the advancements in fault diagnosis accuracy and the potential of minimal sensor deployment for diagnostics. The development of a power recirculating test rig for ball screws by Giberti et al. [152] and the performance degradation prognostics approach by Zhang et al. [153] collectively highlight the multifaceted approaches towards enhancing diagnostic capabilities and ensuring machinery reliability. These innovations are instrumental in fostering the development of Industry 4.0 condition monitoring solutions.
The integration of deep learning and domain adaptation methodologies, as presented by Riaz et al. [156] and Zhu et al. [157], introduces novel paradigms in fault detection and diagnosis, particularly for ball screw actuators. These studies underscore the potential of leveraging advanced analytical techniques to enhance the precision of fault diagnostics under varying operational conditions, marking a significant step forward in the application of machine learning in industrial settings. The fractal analysis conducted by Chang et al. [158] offers a unique perspective on the vibrational characteristics of ball-screw machines, providing a nuanced understanding of wear and lubrication degradation. This approach not only enriches the diagnostics toolkit but also contributes to the broader discourse on maintenance strategies for precision machinery. Multisensor data fusion methods, as explored by Shan et al. [159], further exemplify the trend towards sophisticated diagnostic systems capable of leveraging data from diverse sources. By weighting sensor inputs based on their relevance to specific fault conditions, this methodology enhances the accuracy and reliability of fault diagnosis in ball screw systems. The exploration of indirect sensing techniques for ball screw diagnostics by Pandhare et al. [160] addresses the practical challenges of sensor placement in complex mechanical assemblies. This innovative approach, leveraging deep domain adaptation, highlights the adaptability of diagnostic strategies to the constraints of real-world applications.
The advancements in preload monitoring during operational phases, as demonstrated by Nguyen et al. [161], and early fault diagnosis leveraging convolutional neural networks by Yin et al. [162], signify the industry's move towards real-time, predictive maintenance models. These studies underscore the importance of dynamic monitoring in preempting mechanical failures and optimizing maintenance schedules. Furthermore, the exploration of cross-domain fault diagnosis by Azamfar et al. [163] and the model-based condition-monitoring techniques for EMAs with differential ball screws by Di Rito et al. [164] exemplify the confluence of model-based analyses and data-driven diagnostics. These contributions not only enhance our understanding of specific fault mechanisms but also pave the way for more resilient and fault-tolerant mechanical designs. The eight-DOF dynamic modeling of EMAs by Yin et al. [165] and the spall fault quantification method for flight control EMAs by Ismail et al. [166] reflect the ongoing efforts to refine diagnostic models and methodologies. These studies contribute to a granular understanding of mechanical failures, facilitating targeted interventions and prolonging the service life of critical components. The comprehensive review of condition monitoring for machine tool feed drives by Butler et al. [167], coupled with the data-driven methodology for fault detection in EMAs by Chirico et al. [155] shown in Figure 12 and the identification strategy for roller screws in flight control actuators by Breuneval et al. [154], collectively illustrate the industry's commitment to leveraging advanced diagnostics for enhancing machine reliability and performance. These studies, spanning the spectrum from theoretical models to practical applications, underscore the critical role of diagnostics in the maintenance and operation of modern mechanical systems.
5. Conclusive Remarks and Perspectives
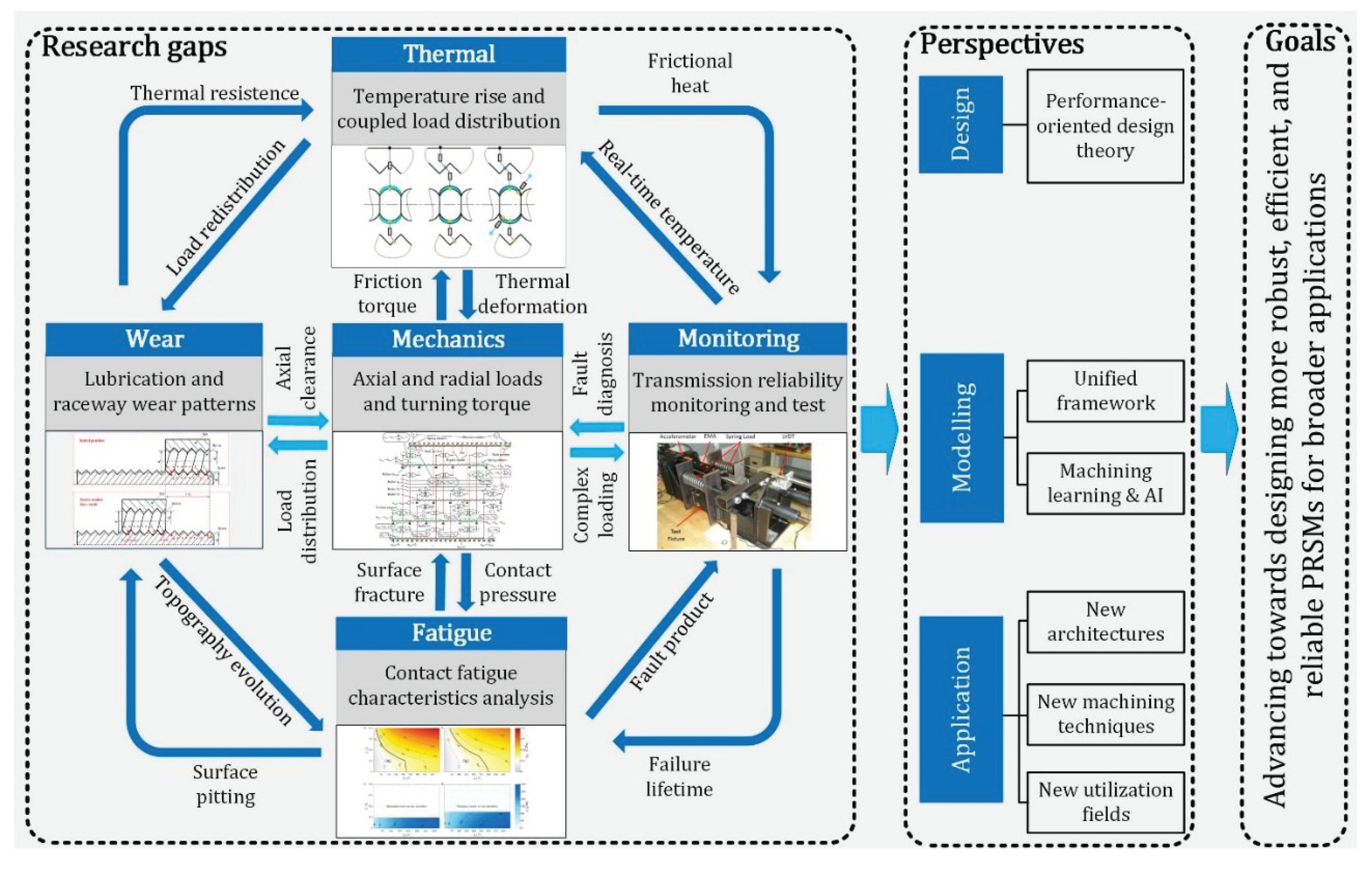
Despite the remarkable progress made in understanding planetary roller screw mechanisms, significant challenges and compelling research directions remain. The complexities introduced by extreme temperatures, large deformations, and multifaceted loads necessitate a re-examination of PRSM behavior. The forthcoming discussion endeavors to bridge the identified research gaps as illustrated in Figure 14, proposing a pathway towards even more robust and reliable PRSM designs optimized for complex operating environments.
5.1. Summary of Current Investigation Status
The current investigation status in the field of PRSMs and related mechanical systems such as BSMs and EMAs reveals a comprehensive and multifaceted approach towards understanding and enhancing their performance under complex conditions. Research efforts have been significantly directed towards addressing the mechanics and dynamics, tribology and thermal behavior, and reliability and condition monitoring of these systems, reflecting a deep engagement with both theoretical and practical aspects of their operation.
Mechanics and Dynamics: The study of static load distribution and axial stiffness within PRSMs has unveiled critical insights into enhancing operational efficiency through advanced mechanical design and optimization. Seminal works have delved into the roles of manufacturing and assembly errors, pitch deviation, surface roughness, and friction factors, thereby paving the way for refined design strategies that enhance precision and reliability. Notably, empirical validations have solidified theoretical models' utility in predicting PRSM behavior under diverse conditions, highlighting the complex relationship between machining errors and load distribution among rollers. The domain of contact kinematics has significantly contributed to the understanding of PRSM performance, focusing on the calculation of contact positions and clearances, slip tendency, and the optimization of thread profiles for improved motion accuracy. Models addressing sliding velocities and the impact of pitch circle mismatch error have been instrumental in guiding design parameters to ameliorate adverse performance effects. In nonlinear dynamics, the focus on dynamic equations of motion, nonlinear modeling, and the implications of these dynamics on PRSM and BSM performance has enriched the foundation for simulating operational behaviors under various loading and motion conditions. Contributions in this area have underscored the sensitivity of dynamic behavior to operational and design parameters, facilitating the development of robust screw mechanisms adaptable to a wide range of conditions.
Tribology and Thermal Behavior: The investigation into EHL, mixed lubrication analysis, and the impact of eccentric errors on PRSMs underscores the complexity of achieving optimal lubrication conditions. Studies focusing on transient mixed EHL, lubrication characteristics with eccentric errors, and dynamic models for lubrication condition identification have provided valuable insights for designing more reliable and efficient PRSMs. Research on surface friction, thread wear, and precision loss has advanced the understanding of wear mechanisms and their impact on PRSM and BSM performance. The exploration of static contact with friction, adhesive wear under insufficient lubrication, and wear prediction models has illuminated strategies for mitigating wear and enhancing operational efficiency. The study of friction torque, power loss, and transmission efficiency has highlighted the mechanisms of friction and strategies for minimizing power losses. Investigations into frictional moments, power loss in ACBBs and EMAs, and the analysis of transmission efficiency in PRSMs have contributed to optimizing the performance and efficiency of these systems.
Reliability and Condition Monitoring: Waviness, defect faults, and reliability assessments have emphasized the dynamic effects of manufacturing imperfections on the vibration characteristics of mechanical components. Advanced dynamic models analyzing the effects of surface waviness and defects have been crucial for improving the reliability of PRSMs, BSMs, and bearings. Research on fatigue, surface fracture, and failure lifetime has delved into the effects of material inhomogeneities, lubrication conditions, and microstructural alterations on the fatigue life and failure mechanisms. These studies have provided a comprehensive understanding of fatigue mechanisms at the microscale, guiding the development of more reliable screw mechanisms. Health condition monitoring and fault diagnosis advancements have significantly enhanced the ability to predict, detect, and diagnose faults within mechanical systems. The integration of data-driven techniques, model-based approaches, and the utilization of digital twins has revolutionized diagnostics, ensuring operational safety and extending the lifespan of machinery.
Figure 13.
Summary of the investigation status for PRSMs.
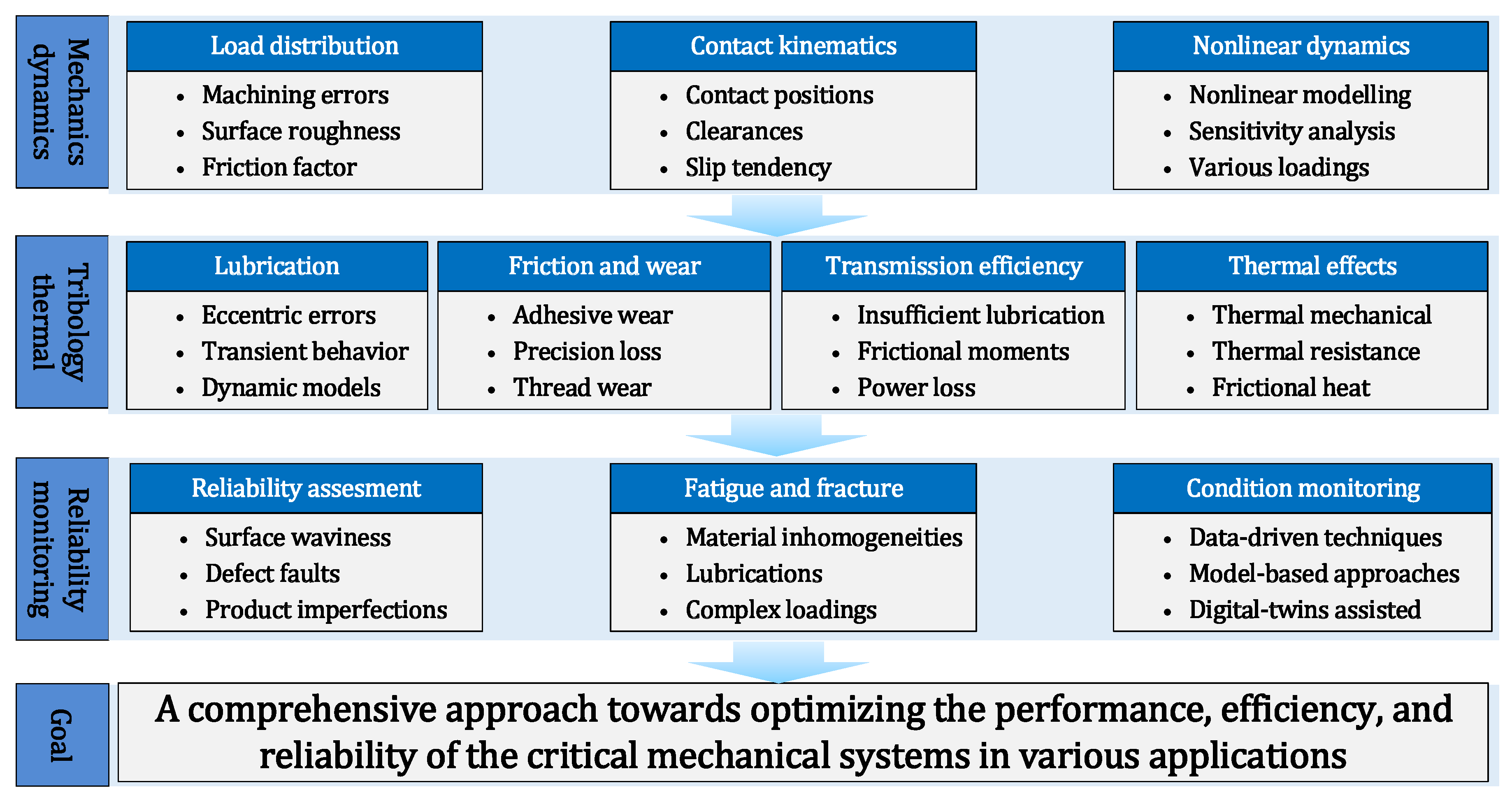
In summary, the current investigation status showcases a robust engagement with the complexities of PRSMs, BSMs, and EMAs, highlighting significant advancements in understanding their mechanics, dynamics, tribology, thermal behavior, and reliability. The integration of theoretical models, empirical validations, and computational techniques underscores a comprehensive approach towards optimizing the performance, efficiency, and reliability of these critical mechanical systems in various applications.
5.2. Challenges and Research Perspectives
In the realm of PRSMs operating under complex conditions, the current state of research reveals significant gaps and areas necessitating further investigation. Despite considerable advancements in understanding PRSMs' mechanics, dynamics, tribology, thermal behavior, and reliability, challenges persist, particularly when these mechanisms are subjected to extreme temperatures, large deformations, and multifaceted loading scenarios. This section outlines the research gaps and proposes directions for future studies, emphasizing the need for a comprehensive analysis to enhance PRSMs' design, performance, and reliability in complex operational contexts.
Research Gaps
Existing studies on PRSMs' thermal characteristics primarily focus on uniform operational conditions, overlooking the nuanced effects of extreme temperatures on internal temperature distribution, contact characteristics, and overall performance. There's a critical need for detailed thermal rise predictions and contact analyses that consider the dynamic thermal environment and its impact on PRSMs. The interaction between thermal effects and mechanical loads significantly alters load distribution within PRSMs, yet current models often fail to account for this coupling. Research should aim to develop integrated thermo-mechanical models that accurately reflect load distribution changes under combined thermal and mechanical stresses.
The influence of axial, radial loads, and overturning moments on load distribution and radial deformation remains underexplored. Future studies should focus on comprehensive load distribution analyses that incorporate these complex loading conditions to predict performance more accurately and optimize PRSM designs. While some research has addressed PRSM lubrication, there's a gap in understanding how complex operational conditions affect lubrication efficiency, wear patterns, and precision loss. Studies should explore lubrication dynamics and wear mechanisms under varying conditions to develop more effective lubrication strategies and wear-resistant designs. Besides, the impact of extreme operational conditions on wear morphology and the effectiveness of tooth profile optimization strategies is not well understood. Research is needed to establish models for predicting wear patterns and to devise tooth profile optimization methods that enhance PRSMs' accuracy and longevity.
The fatigue behavior of PRSMs under complex operational conditions, including high and low temperatures and large deformations, is a critical yet underexplored area. Future work should aim to analyze fatigue characteristics comprehensively, considering the unique stressors present in complex environments. And there's a lack of empirical data on PRSMs' transmission reliability when exposed to complex operational conditions. Experimental studies are essential to validate theoretical models, assess reliability, and identify potential failure modes under such conditions.
Figure 14. Outlook for modelling trends and further research directions. Images from Refs. [49,86,104,131,155].
Figure 14.
Outlook for modelling trends and further research directions. Images from Refs. [49,86,104,131,155].
Research Perspectives
In the exploration of PRSMs under extreme or complex operational conditions, the challenges we encounter extend beyond mere analysis of temperature rise and deformation. The performance characteristics of PRSMs under such conditions diverge significantly from standard operational scenarios, necessitating a comprehensive reevaluation and analysis from the ground up. This endeavor aims not only to dissect the immediate impacts of temperature and deformation but also to scrutinize a series of consequential issues that may arise, thereby averting potential failure states and laying a foundation for the improved design of PRSMs.
Firstly, the internal temperature distribution of PRSMs is subject to change under external high and low-temperature environments, prompting an analysis of their thermal rise characteristics and contact behavior under such conditions. Concurrently, the load distribution within PRSMs undergoes significant alterations when subjected to external thermal loads, necessitating an examination under thermomechanical coupling conditions to understand the variations in load distribution. The analyses mentioned above primarily consider static processes without taking lubrication into account. To align more closely with real-world operational conditions, it becomes imperative to analyze the friction, force, and motion of PRSMs under lubricated conditions. Under extreme operational scenarios, the precision and lifespan of PRSMs emerge as critical concerns. To address these, a computational model for the wear morphology of PRSMs should be established, alongside optimization of the tooth profile to enhance precision retention capabilities.
Furthermore, PRSMs are susceptible to excessive deformation due to temperature, risking premature failure or seizure. They may also undergo significant deformation due to complex external loading conditions. Therefore, an analysis of load distribution under large deformation conditions should be conducted, followed by optimization of the thread profile to reduce the unevenness in load distribution. On another front, the fatigue characteristics of PRSMs under complex conditions, as well as their vibrational behavior during operation, present significant variances from standard conditions. These aspects are crucial to the operational characteristics of PRSMs, yet current research in these areas remains scant. Given these considerations, there is a pressing need for further analysis to enhance the completeness of operational characteristic studies of PRSMs under complex conditions. This comprehensive approach not only addresses the immediate challenges posed by varied temperatures and large deformations but also paves the way for advancements in the design and application of PRSMs in demanding environments.
Acknowledgments
This work was financially supported by Jiangxi Provincial Natural Science Foundation (No.20224BAB214042).
References
- Lemor, P.C. The roller screw, an efficient and reliable mechanical component of electro-mechanical actuators. Proc Iecec, (1996) 215-220.
- Naayagi, R.T. , A Review of More Electric Aircraft Technology. 2013 International Conference on Energy Efficient Technologies for Sustainability (Iceets), (2013).
- Jänker, P.; Claeyssen, F.; Grohmann, B.; Christmann, M.; Lorkowski, T.; LeLetty, R.; Sosniki, O.; Pages, A. New Actuators for Aircraft and Space Applications. Actuator 08, Conference Proceedings, (2008) 346-+.
- Bennett, J.W.; Mecrow, B.C.; Jack, A.G.; Atkinson, D.J. A Prototype Electrical Actuator for Aircraft Flaps. Ieee T Ind Appl 2010, 46, 915–921. [Google Scholar] [CrossRef]
- Rosenberg, G.; Snyder, A.; Weiss, W.; Landis, D.; Geselowitz, D.; Pierce, W. A roller screw drive for implantable blood pumps. Trans Am Soc Artif Intern Organs 1982, 28, 123–6. [Google Scholar]
- Ni, Z.; Wang, T.; Liu, D. Survey on medical robotics. Jixie Gongcheng Xuebao/Journal of Mechanical Engineering 2015, 51, 45–52. [Google Scholar] [CrossRef]
- Kawamoto, Y.; Suda, Y.; Inoue, H.; Kondo, T. , Electro-mechanical suspension system considering energy consumption and vehicle manoeuvre. Vehicle Syst Dyn 2008, 46, 1053–1063. [Google Scholar] [CrossRef]
- Bruno, S.C. , Screw-threaded mechanism, Google Patents 1954. [Google Scholar]
- Bruno, S.C. , Nut and screw devices, Google Patents 1965. [Google Scholar]
- Roantree, W.J. , Differential roller nut, Google Patents 1968. [Google Scholar]
- Saari, O. , Anti-friction nut/screw drive, Google Patents 1986. [Google Scholar]
- Blinov, D.S.; Kolobov, A.Y.; Dikun, E.V. , Prospects of Using Electromechanical Drives Based on Roller Screw Mechanisms in Aerospace Hardware, Xliii Academic Space Conference, Dedicated to the Memory of Academician S P Korolev and Other Outstanding Russian Scientists - Pioneers of Space Exploration 2019, 2171. 2171.
- Okwudire, C.E. , Improved Screw-Nut Interface Model for High-Performance Ball Screw Drives. J Mech Design 2011, 133. [Google Scholar] [CrossRef]
- Okwudire, C.E.; Altintas, Y. , Hybrid Modeling of Ball Screw Drives With Coupled Axial. Torsional, and Lateral Dynamics. J Mech Design 2009, 131. [Google Scholar] [CrossRef]
- Zhao, C.J.; Yu, X.K.; Huang, Q.X.; Ge, S.D.; Gao, X. , Analysis on the load characteristics and coefficient of friction of angular contact ball bearing at high speed. Tribol Int 2015, 87, 50–56. [Google Scholar]
- Chen, Y.J.; Tang, W.C. , Dynamic contact stiffness analysis of a double-nut ball screw based on a quasi-static method. Mech Mach Theory 2014, 73, 76–90. [Google Scholar] [CrossRef]
- Oh, K.J.; Cao, L.; Chung, S.C. , Explicit modeling and investigation of friction torques in double-nut ball screws for the precision design of ball screw feed drives. Tribol Int 2020, 141. [Google Scholar] [CrossRef]
- Zheng, S.C.; Fu, Y.L.; Wang, D.Y.; Pan, J.L.; Li, L.J.; Wang, J.B. , A Novel Planetary Thread Roller Bearing: Design and Analysis of Load Characteristic. J Mech Design 2021, 143. [Google Scholar] [CrossRef]
- Ni, J.A.; Yin, J.H.; Li, D.D.; Liu, J.Q.; Xie, Z.J. , Modeling of contact load distribution of planetary threaded roller bearing based on deformation coordination. Mech Based Des Struc 2023, 51, 5856–5877. [Google Scholar] [CrossRef]
- Pochettino, P.; Ballesio, M.; Gallieni, D.; Gill, S. , Hexapod/Sage III roller screws lifetime and lubrication tests. Esa Sp Publ 1998, 438, 49–54. [Google Scholar]
- Vanthuyne, T. , AN ELECTRICAL THRUST VECTOR CONTROL SYSTEM FOR THE VEGA LAUNCHER, 2009.
- Claeyssen, F.; Jänker, P.; LeLetty, R.; Sosniki, O.; Pages, A.; Magnac, G.; Christmann, M.; Dodds, G. , New Actuators for Aircraft, Space and Military Applications. Actuator, (2010) 324-+.
- Garrison, M.; Steffan, S. , Two-Fault Tolerant Electric Actuation Systems for Space Applications, 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.
- Lepagneul, J.; Tadrist, L.; Mermoz, E.; Linares, J.M. , Axial backlash of planetary roller screw mechanisms: Geometric modelling and Sobol's analysis of design parameters. Cirp Ann-Manuf Techn 2023, 72, 113–116. [Google Scholar] [CrossRef]
- Liu, Y.Q.; Shang, Y.; Wang, J.S. , Mathematical analysis of the meshing performance of planetary roller screws applying different roller thread shapes. Adv Mech Eng 2017, 9. [Google Scholar] [CrossRef]
- Du, X.; Lu, S.Y.; Tang, R.; Li, X.B.; Miao, J.C.; Wu, L.Y.; Yang, Z.; Chen, B.K. , An efficient method for designing high-performance planetary roller screw mechanism with low contact stress. Tribol Int 2023, 187. [Google Scholar] [CrossRef]
- Xiao, Y.L.; Fu, J.; Zhao, Y.S.; Li, F.P.; Chen, K. , Multi-objective optimization of planetary roller screw mechanism based on improved boundary condition. Int J Adv Manuf Tech 2023, 124, 4479–4491. [Google Scholar] [CrossRef]
- Hu, R.; Wei, P.T.; Zhou, P.L.; Liu, H.J.; Du, X.S.; Zhu, C.C. , A roller taper modification method for load distribution optimization of planetary roller screw mechanism. J Adv Mech Des Syst 2022, 16, 1–19. [Google Scholar] [CrossRef]
- Yao, Q.; Zhang, M.C.; Liu, Y.S.; Ma, S.J. , Multi-objective optimization of planetary roller screw mechanism based on improved mathematical modelling. Tribol Int 2021, 161. [Google Scholar] [CrossRef]
- Yao, Q.; Zhang, M.C.; Ma, S.J. , Structural design for planetary roller screw mechanism based on the developed contact modelling. Tribol Int 2022, 171. [Google Scholar] [CrossRef]
- Yao, Q.; Zhang, M.C.; Ma, S.J.; Jiang, Q.S. , Study on multi-level progressive optimization of planetary roller screw mechanism. Tribol Int 2023, 189. [Google Scholar] [CrossRef]
- Guadagno, M.C.; Loss, J.M.; Pearce, J.M. , Open Source 3D-Printable Planetary Roller Screw for Food Processing Applications. Technologies 2021, 9. [Google Scholar] [CrossRef]
- Peng, B.; Luo, Y.; Niu, T.; Baddour, N.; Li, C.S.; Luo, Y.X. , Straightening of the rollers of planetary roller screw - Design of straightening die and experimental validation. J Manuf Process 2023, 92, 42–62. [Google Scholar] [CrossRef]
- Xu, H.W.; Wei, P.T.; Du, X.S.; Hu, R.; Liu, H.J.; Kang, X.H.; Zhu, C.C. , A study of precision grinding of micro-pitch internal thread for planetary roller screw mechanism. J Manuf Process 2023, 106, 35–50. [Google Scholar] [CrossRef]
- Wu, H.L.; Wei, P.T.; Hu, R.; Liu, H.J.; Du, X.S.; Zhou, P.L.; Zhu, C.C. , Study on the relationship between machining errors and transmission accuracy of planetary roller screw mechanism using analytical calculations and machine-learning model. J Comput Des Eng 2023, 10, 398–413. [Google Scholar] [CrossRef]
- Huang, T.; Kang, Y.T.; Du, S.J.; Zhang, Q.; Luo, Z.H.; Tang, Q.; Yang, K.M. , A survey of modeling and control in ball screw feed-drive system. Int J Adv Manuf Tech 2022, 121, 2923–2946. [Google Scholar] [CrossRef]
- Li, C.Y.; Xu, M.T.; Song, W.J.; Zhang, H.Z. , A review of static and dynamic analysis of ball screw feed drives, recirculating linear guideway, and ball screw. Int J Mach Tool Manu 2023, 188. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.H.; Wang, Y.W.; Ma, S.J.; Lim, T.C. , A review of electromechanical actuators for More/All Electric aircraft systems. P I Mech Eng C-J Mec 2018, 232, 4128–4151. [Google Scholar] [CrossRef]
- Maré, J.C.; Fu, J. , Review on signal-by-wire and power-by-wire actuation for more electric aircraft. Chinese J Aeronaut 2017, 30, 857–870. [Google Scholar] [CrossRef]
- Wu, L.P.; Ma, S.J.; Fu, X.J.; Zhang, J.X.; Liu, G. , A review of planetary roller screw mechanism for development and new trends. P I Mech Eng C-J Mec 2022, 236, 10822–10840. [Google Scholar] [CrossRef]
- Li, X.; Liu, G.; Fu, X.J.; Ma, S.J. , Review on Motion and Load-Bearing Characteristics of the Planetary Roller Screw Mechanism. Machines 2022, 10. [Google Scholar] [CrossRef]
- Cheng, Z.W.; Zu, L.; Zhou, C.G. , Review on errors and transmission characteristics of the planetary roller screw mechanism. P I Mech Eng C-J Mec, (2024).
- Ma, S.J.; Wu, G.Y.; Zhang, J.X.; Liu, G. , Experimental Research on Static Stiffness of the Planetary Roller Screw Mechanism. Matec Web Conf 2020, 306. [Google Scholar]
- Hu, R.; Wei, P.T.; Du, X.S.; Zhou, J.; Liu, H.J.; Liu, G.S.; Zhu, C.C. , Investigation of loaded contact characteristics of planetary roller screw mechanism based on influence coefficient method and machine learning. Adv Eng Inform 2023, 58. [Google Scholar] [CrossRef]
- Ma, S.J.; Cai, W.; Wu, L.P.; Liu, G.; Peng, C. , Modelling of transmission accuracy of a planetary roller screw mechanism considering errors and elastic deformations. Mech Mach Theory 2019, 134, 151–168. [Google Scholar] [CrossRef]
- Zhang, W.J.; Liu, G.; Ma, S.J.; Tong, R.T. , Load distribution over threads of planetary roller screw mechanism with pitch deviation. P I Mech Eng C-J Mec 2019, 233, 4653–4666. [Google Scholar] [CrossRef]
- Du, X.; Chen, B.K.; Liu, R.R.; Li, C.Y. , Research on Fractal Model of Load Distribution and Axial Stiffness of Planetary Roller Screw Mechanism Considering Surface Roughness and Friction Factor. Adv Theor Simul 2022, 5. [Google Scholar] [CrossRef]
- Du, X.; Chen, B.K.; Zheng, Z.D. , Investigation on mechanical behavior of planetary roller screw mechanism with the effects of external loads and machining errors. Tribol Int 2021, 154. [Google Scholar] [CrossRef]
- Fu, X.J.; Li, X.; Ma, S.J.; Gerada, D.; Liu, G.; Gerada, C. , A multi-roller static model of the planetary roller screw mechanism considering load sharing. Tribol Int 2022, 173. [Google Scholar] [CrossRef]
- Hu, R.; Wei, P.T.; Liu, H.J.; Du, X.S.; Zhou, P.L.; Zhu, C.C. , Investigation on load distribution among rollers of planetary roller screw mechanism considering machining errors: Analytical calculation and machine learning approach. Mech Mach Theory 2023, 185. [Google Scholar] [CrossRef]
- Zhang, W.J.; Liu, G.; Tong, R.T.; Ma, S.J. , Load distribution of planetary roller screw mechanism and its improvement approach. P I Mech Eng C-J Mec 2016, 230, 3304–3318. [Google Scholar] [CrossRef]
- Abevi, F.; Daidie, A.; Chaussumier, M.; Sartor, M. , Static Load Distribution and Axial Stiffness in a Planetary Roller Screw Mechanism. J Mech Design 2016, 138. [Google Scholar] [CrossRef]
- Abevi, F.; Daidie, A.; Chaussumier, M.; Orieux, S. , Static Analysis of an Inverted Planetary Roller Screw Mechanism. J Mech Robot 2016, 8. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A. , Stiffness of the Roller Screw Mechanism by the Direct Method. Mech Based Des Struc 2014, 42, 17–34. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, C.X.; Cheng, Q.; Zhang, T.; Shi, W.; Xue, D.Y. , Kinematic modeling of a planetary roller screw mechanism considering runout errors and elastic deformation. Int J Adv Manuf Tech 2023, 124, 4455–4463. [Google Scholar] [CrossRef]
- Fu, X.J.; Liu, G.; Ma, S.J.; Tong, R.T.; Lim, T.C. , A Comprehensive Contact Analysis of Planetary Roller Screw Mechanism. J Mech Design 2017, 139. [Google Scholar] [CrossRef]
- Fu, X.J.; Liu, G.; Ma, S.J.; Tong, R.T.; Lim, T.C. , Kinematic Model of Planetary Roller Screw Mechanism With Run-Out and Position Errors. J Mech Design 2018, 140. [Google Scholar] [CrossRef]
- Hojjat, Y.; Agheli, M.M. , A comprehensive study on capabilities and limitations of roller-screw with emphasis on slip tendency. Mech Mach Theory 2009, 44, 1887–1899. [Google Scholar] [CrossRef]
- Xing, M.C.; Zhang, B.H.; Deng, P.; Xu, J.Q.; Cui, Y. , A comprehensive analysis of contact kinematics for planetary roller screw mechanism. Tribol Int 2023, 179. [Google Scholar] [CrossRef]
- Sandu, S.; Biboulet, N.; Nelias, D.; Abevi, F. , An efficient method for analyzing the roller screw thread geometry. Mech Mach Theory 2018, 126, 243–264. [Google Scholar] [CrossRef]
- Sandu, S.; Biboulet, N.; Nelias, D.; Abevi, F. , Analytical prediction of the geometry of contact ellipses and kinematics in a roller screw versus experimental results. Mech Mach Theory 2019, 131, 115–136. [Google Scholar] [CrossRef]
- Velinsky, S.A.; Chu, B.; Lasky, T.A. , Kinematics and Efficiency Analysis of the Planetary Roller Screw Mechanism. J Mech Design 2009, 131. [Google Scholar] [CrossRef]
- Mamaev, I.M.; Morozov, V.V.; Fedotov, O.V.; Filimonov, V.N. , Harmonic analysis of the kinematic error in a planetary roller screw. Russian Engineering Research 2016, 36, 515–519. [Google Scholar] [CrossRef]
- Acharya, J.; Venkataram, N. , Kinematic Analysis and Thread Profile Modification Study of Planetary Roller Screw Actuator. Mater Today-Proc 2017, 4, 10965–10970. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A. , Contact Kinematics in the Roller Screw Mechanism. J Mech Design 2013, 135. [Google Scholar] [CrossRef]
- Ma, S.J.; Zhang, T.; Liu, G.; Tong, R.T.; Fu, X.J. , Kinematics of Planetary Roller Screw Mechanism considering Helical Directions of Screw and Roller Threads. Math Probl Eng 2015, 2015. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A. , Kinematics of Roller Migration in the Planetary Roller Screw Mechanism. J Mech Design 2012, 134. [Google Scholar] [CrossRef]
- Li, X.; Liu, G.; Fu, X.J.; Ma, S.J. , Lagrange-method-based dynamic analysis of multi-stage planetary roller screw mechanism. Mech Sci 2021, 12, 471–478. [Google Scholar] [CrossRef]
- Xu, M.T.; Zhang, H.Z.; Liu, Z.D.; Li, C.Y.; Zhang, Y.M.; Mu, Y.Z.; Hou, C.M. , A time-dependent dynamic model for ball passage vibration analysis of recirculation ball screw mechanism. Mech Syst Signal Pr 2021, 157. [Google Scholar] [CrossRef]
- Jones, M.H.; Velinsky, S.A.; Lasky, T.A. , Dynamics of the Planetary Roller Screw Mechanism. J Mech Robot 2016, 8. [Google Scholar] [CrossRef]
- Fu, X.J.; Liu, G.; Tong, R.T.; Ma, S.J.; Lim, T.C. , A nonlinear six degrees of freedom dynamic model of planetary roller screw mechanism. Mech Mach Theory 2018, 119, 22–36. [Google Scholar] [CrossRef]
- Fu, X.J.; Liu, G.; Ma, S.J.; Tong, R.T.; Li, X. , An efficient method for the dynamic analysis of planetary roller screw mechanism. Mech Mach Theory 2020, 150. [Google Scholar] [CrossRef]
- Guo, C.; Chen, L.P.; Ding, J.W. , A novel dynamics model of ball-screw feed drives based on theoretical derivations and deep learning. Mech Mach Theory 2019, 141, 196–212. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, C.Y.; Wen, B.C. , Dynamics analysis on the MDOF model of ball screw feed system considering the assembly error of guide rails. Mech Syst Signal Pr 2022, 178. [Google Scholar] [CrossRef]
- Xu, M.T.; Li, C.Y.; Zhang, H.Z.; Liu, Z.D.; Zhang, Y.M. , A comprehensive nonlinear dynamic model for ball screw feed system with rolling joint characteristics. Nonlinear Dynam 2021, 106, 169–210. [Google Scholar] [CrossRef]
- Fu, X.J.; Liu, G.; Li, X.; Ma, S.J.; Qiao, G. , Dynamic Modeling of the Double-Nut Planetary Roller Screw Mechanism Considering Elastic Deformations. J Comput Nonlin Dyn 2021, 16. [Google Scholar] [CrossRef]
- Wu, L.P.; Ma, S.J.; Deng, P.; Huang, Q.Q. , Research on the Modeling of Bending-Torsional Coupling and Vibration Characteristics of Planetary Roller Screw Mechanism. Electronics-Switz 2022, 11. [Google Scholar] [CrossRef]
- Miao, H.H.; Wang, C.Y.; Hao, J.; Li, C.Y.; Xu, M.T.; Liu, Z.D. , Dynamic analysis of the column-spindle system considering the nonlinear characteristics of kinematic joints. Mech Mach Theory 2022, 174. [Google Scholar] [CrossRef]
- Yang, J.C.; Li, C.Y.; Xu, M.T.; Yang, T.Z.; Zhang, Y.M. , Nonlinear dynamic characteristics of ball screw feed system under thermal deformation. Nonlinear Dynam 2022, 107, 1965–1987. [Google Scholar] [CrossRef]
- Liu, Z.D.; Xu, M.T.; Zhang, H.Z.; Li, C.Y.; Yao, G.; Li, Z.Y.; Miao, H.H.; Wang, C.Y.; Zhang, Y.M. , Nonlinear dynamic analysis of variable lead preloaded single nut ball screw considering the variation of working parameters. Nonlinear Dynam 2022, 108, 141–166. [Google Scholar] [CrossRef]
- Xie, Z.J.; Xue, Q.H.; Wu, J.Q.; Gu, L.; Wang, L.Q.; Song, B.Y. , Mixed-lubrication analysis of planetary roller screw. Tribol Int 2019, 140. [Google Scholar] [CrossRef]
- Zhou, G.W.; Zhang, Y.H.; Wang, Z.Z.; Pu, W. , Analysis of transient mixed elastohydrodynamic lubrication in planetary roller screw mechanism. Tribol Int 2021, 163. [Google Scholar] [CrossRef]
- Xing, M.; Zhang, B.; Liu, S.; Cui, Y.; Xu, J.; Deng, P. , Elastohydrodynamic lubrication analysis with eccentric errors for planetary roller screw mechanism. Tribol Int 2024, 109362. [Google Scholar] [CrossRef]
- Cai, W.; Liu, G.; Ma, S.J.; Fu, X.J.; Zhang, J.N.; Niu, M.D. A dynamic separable convolution RCNN for lubrication condition identification of planetary roller screw mechanism. Adv Mech Eng 2022, 14. [Google Scholar] [CrossRef]
- Aurégan, G.; Fridrici, V.; Kapsa, P.; Rodrigues, F. , Experimental simulation of rolling-sliding contact for application to planetary roller screw mechanism. Wear 2015, 332, 1176–1184. [Google Scholar] [CrossRef]
- Xing, M.C.; Zhang, B.H.; Deng, P.; Xu, J.Q.; Cui, Y. , A novel wear prediction model for planetary roller screw based on universal sliding distance model. Tribol Int 2022, 175. [Google Scholar] [CrossRef]
- Ma, S.J.; Wu, L.P.; Fu, X.J.; Li, Y.J.; Liu, G. , Modelling of static contact with friction of threaded surfaces in a planetary roller screw mechanism, Mech Mach Theor 2019, 139, 212–236. [Google Scholar] [CrossRef]
- Aur; eacute; G. gan; Fridrici, V.; Kapsa, P.; Rodrigues, F., Wear Behavior of Martensitic Stainless Steel in Rolling-Sliding Contact for Planetary Roller Screw Mechanism: Study of the WC/C Solution. Tribology Online 2016, 11, 209–217. [Google Scholar] [CrossRef]
- Meng, J.J.; Du, X.; Li, Y.M.; Chen, P.; Xia, F.C.; Wan, L. , A Multiscale Accuracy Degradation Prediction Method of Planetary Roller Screw Mechanism Based on Fractal Theory Considering Thread Surface Roughness. Fractal Fract 2021, 5. [Google Scholar] [CrossRef]
- Meng, J.J.; Du, X.; Zhao, X.; Zheng, J.W.; Wang, D.W.; Wa, L. n, Research on Contact and Wear Characteristics of the Planetary Roller Screw Mechanism with Screw Misalignments. Lubricants 2022, 10. [Google Scholar] [CrossRef]
- Shangjun, M.; Qianjin, X.; Chuangchuang, L.; Jianxin, Z.; Geng, L. , Wear Modelling of the Thread Pair in a Planetary Roller Screw Mechanism, Proceedings of the International Conference of Fluid Power and Mechatronic Control Engineering (ICFPMCE 2022), Atlantis Press 2022, pp. 75–95.
- Cheng, Q.; Qi, B.B.; Liu, Z.F.; Zhang, C.X.; Xue, D.Y. , An accuracy degradation analysis of ball screw mechanism considering time-varying motion and loading working conditions. Mech Mach Theory 2019, 134, 1–23. [Google Scholar] [CrossRef]
- Zhao, J.J.; Lin, M.X.; Song, X.C.; Guo, Q.Z. , Analysis of the precision sustainability of the preload double-nut ball screw with consideration of the raceway wear. P I Mech Eng J-J Eng 2020, 234, 1530–1546. [Google Scholar] [CrossRef]
- Liu, J.L.; Ma, C.; Wang, S.L. , Precision loss modeling method of ball screw pair. Mech Syst Signal Pr 2020, 135. [Google Scholar] [CrossRef]
- Zhou, H.X.; Zhou, C.G.; Feng, H.T.; Ou, Y. , Theoretical and experimental analysis of the preload degradation of double-nut ball screws. Precis Eng 2020, 65, 72–90. [Google Scholar] [CrossRef]
- Zhou, C.G.; Zhou, H.X.; Feng, H.T. , Experimental analysis of the wear coefficient of double-nut ball screws. Wear 2020, 446. [Google Scholar] [CrossRef]
- Zhou, C.G.; Wang, L.D.; Shen, J.W.; Chen, C.H.; Ou, Y.; Feng, H.T. , Wear Characterization of Raceway Surface Profiles of Ball Screws. J Tribol-T Asme 2022, 144. [Google Scholar] [CrossRef]
- Xie, Z.J.; Wang, Y.; Ni, J.A.; Yin, J.H.; Yu, D.; Liu, J.Q. , Friction torque analysis of planetary roller screw based on the creepage theory. Tribol Int 2023, 178. [Google Scholar] [CrossRef]
- Gan, F.J.; Mao, P.C.; Zheng, S.C.; Li, G.L.; Xin, S.P. , Research on Friction Torque Analysis of Planetary Roller Screw Mechanism considering load distribution. Aip Conf Proc 2018, 1955. [Google Scholar]
- Liu, L.; Zhang, C.C.; Guo, Y.Q.; Bian, Y.X.; Fu, Y.L.; Ning, Y.F.; Zhou, J.J. , Friction Torque Analysis and Verification of Planetary Thread Roller Bearing. Actuators 2022, 11. [Google Scholar] [CrossRef]
- Popescu, A.; Houpert, L.; Olaru, D.N. , Four approaches for calculating power losses in an angular contact ball bearing. Mech Mach Theory 2020, 144. [Google Scholar] [CrossRef]
- Fu, J.; Maré, J.C.; Fu, Y.L. , Modelling and simulation of flight control electromechanical actuators with special focus on model architecting, multidisciplinary effects and power flows. Chinese J Aeronaut 2017, 30, 47–65. [Google Scholar] [CrossRef]
- Zheng, S.; Fu, Y.; Zhang, Z.; Zhang, P.; Zhang, W. , Research on Detect Method for Transmission Accuracy and Efficiency of Planetary Roller Screw Pair, 2018 IEEE International Conference on Mechatronics and Automation (ICMA) 2018, pp. 1400–1404.
- Qiao, G.; Liu, G.; Ma, S.J.; Wang, Y.W.; Li, P.; Lim, T.C. , Thermal characteristics analysis and experimental study of the planetary roller screw mechanism. Appl Therm Eng 2019, 149, 1345–1358. [Google Scholar] [CrossRef]
- Lizon, J.L. , Planetary roller screw for cryogenic applications. Proc Spie 2022, 12188. [Google Scholar]
- Du, C.M.; Liu, G.; Qiao, G.; Ma, S.J.; Ca, W. , Transient thermal analysis of standard planetary roller screw mechanism based on finite element method. Adv Mech Eng 2018, 10. [Google Scholar] [CrossRef]
- Ma, S.J.; Liu, G.; Tong, R.T.; Fu, X.J. , A Frictional Heat Model of Planetary Roller Screw Mechanism Considering Load Distribution. Mech Based Des Struc 2015, 43, 164–182. [Google Scholar] [CrossRef]
- Ma, S.J.; Zhang, C.H.; Zhang, T.; Liu, G.; Liu, S.M. , Thermo-mechanical coupling-based finite element analysis of the load distribution of planetary roller screw mechanism. Adv Mech Eng 2018, 10. [Google Scholar] [CrossRef]
- Zhang, L.C.; Ou, Y.; Feng, H.T. , Prediction of the Thermal Elongation of the Ball Screw Mechanism under Various Rotational Speeds. Int J Precis Eng Man 2021, 22, 1221–1228. [Google Scholar] [CrossRef]
- Wang, H.T.; Li, F.H.; Cai, Y.L.; Liu, Y.M.; Yang, Y.W. , Experimental and theoretical analysis of ball screw under thermal effect. Tribol Int 2020, 152. [Google Scholar] [CrossRef]
- Li, T.J.; Wang, M.Z.; Zhang, Y.M.; Zhao, C.Y. , Real-time thermo-mechanical dynamics model of a ball screw system based on a dynamic thermal network. Int J Adv Manuf Tech 2020, 108, 613–624. [Google Scholar] [CrossRef]
- Redmond, M.; Novak, K.; Mireles, V. , Static Ball Bearing Thermal Conductance in Air and Vacuum: Review and Correlation. J Thermophys Heat Tr 2017, 31, 841–846. [Google Scholar] [CrossRef]
- Cheng, J.; Zhou, Z.D.; Feng, Y.X.; Liu, Z.Y.; Zhang, Y.Y. , Thermo-Mechanical Coupling Analysis of the Actuating Mechanism in a High Speed Press. Int J Precis Eng Man 2018, 19, 643–653. [Google Scholar] [CrossRef]
- Ju, X.J.; Lu, J.L.; Jin, H.Y. , Study on heat transfer characteristics and thermal error suppression method of cylindrical giant magnetostrictive actuator for ball screw preload. P I Mech Eng B-J Eng 2021, 235, 782–794. [Google Scholar] [CrossRef]
- Liu, J.; Shi, Z.F.; Shao, Y.M. , Vibration Characteristics of a Ball Bearing Considering Point Lubrication and Nonuniform Surface Waviness. Int J Acoust Vib 2018, 23, 355–361. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y.M. , Vibration modelling of nonuniform surface waviness in a lubricated roller bearing. J Vib Control 2017, 23, 1115–1132. [Google Scholar] [CrossRef]
- Liu, J.; Wu, H.; Shao, Y.M. , A comparative study of surface waviness models for predicting vibrations of a ball bearing. Sci China Technol Sc 2017, 60, 1841–1852. [Google Scholar] [CrossRef]
- Liu, J.; Pang, R.K.; Xu, Y.J.; Ding, S.Z.; He, Q.B. , Vibration analysis of a single row angular contact ball bearing with the coupling errors including the surface roundness and waviness. Sci China Technol Sc 2020, 63, 943–952. [Google Scholar] [CrossRef]
- Su, S.M.; Cao, H.R.; Zhang, Y.Y. , Dynamic modeling and characteristics analysis of cylindrical roller bearing with the surface texture on raceways. Mech Syst Signal Pr 2021, 158. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.B.; Ding, S.Z.; Pang, R.K. , A time-varying friction moment calculation method of an angular contact ball bearing with the waviness error. Mech Mach Theory 2020, 148. [Google Scholar] [CrossRef]
- Liu, J.; Wang, L.F.; Shi, Z.F. , Dynamic modelling of the defect extension and appearance in a cylindrical roller bearing. Mech Syst Signal Pr 2022, 173. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Yang, Y.; Shen, G.J.; Li, Y.H.; Huang, L.Y.; Hu, N.Q. , Dynamic modeling, analysis, and experimental study of ball screw pairs with nut spalling faults in electromechanical actuators. Mech Syst Signal Pr 2023, 184. [Google Scholar] [CrossRef]
- Yao, Q.; Zhang, M.C.; Jiang, Q.S.; Ma, S.J. , Uncertainty analysis and reliability improvement of planetary roller screw mechanism using active learning Kriging model. Probabilist Eng Mech 2023, 72. [Google Scholar] [CrossRef]
- Du, X.; Wu, L.Y.; Miao, J.C.; Li, X.B.; Shi, Z.X.; Chen, B.K. , Time-varying contact characteristics of the planetary roller screw mechanism considering nonuniform surface waviness. Tribol Int 2023, 187. [Google Scholar] [CrossRef]
- Cai, W.; Liu, G.; Ma, S.; Qiao, G.; Du, C. , Study on jamming mechanism of the planetary roller screw mechanism. Journal of Physics: Conference Series 2019, 1314, 012079. [Google Scholar] [CrossRef]
- El Laithy, M.; Wang, L.; Harvey, T.J.; Vierneusel, B.; Correns, M.; Blass, T. , Further understanding of rolling contact fatigue in rolling element bearings - A review. Tribol Int 2019, 140. [Google Scholar] [CrossRef]
- Moreira, T.M.M.; Godefroid, L.B.; de Faria, G.L.; Silveira, R.A.D. , Computational analysis via FEM of Tirefond screws used in the fastening system of railroads aiming to avoid a recurrent failure case. Eng Fail Anal 2019, 106. [Google Scholar] [CrossRef]
- Kraemer, F.; Klein, M.; Oechsner, M. , Fatigue strength of metric steel screws depending on pre-load and nut type. Eng Fail Anal 2020, 112. [Google Scholar] [CrossRef]
- Wang, M.S.; Jia, X.D.; Lv, W.Y.; Sun, W.H.; Bai, F.X.; Guo, H. , Failure analysis of screw shaft in screw compressor. Eng Fail Anal 2021, 125. [Google Scholar] [CrossRef]
- Kim, Y.C.; Kim, D.H.; Kim, S.W. , Evaluation of the Multiaxial Fatigue Life of Electro-Mechanical Actuator for Aircraft Blade Pitch Control Based on Certification Standards. Aerospace-Basel 2024, 11. [Google Scholar] [CrossRef]
- Lepagneul, J.; Tadrist, L.; Sprauel, J.M.; Linares, J.M. , Fatigue lifespan of a planetary roller-screw mechanism. Mech Mach Theory 2022, 172. [Google Scholar] [CrossRef]
- Zhen, N.; An, Q. , Analysis of stress and fatigue life of ball screw with considering the dimension errors of balls. Int J Mech Sci 2018, 137, 68–76. [Google Scholar] [CrossRef]
- Li, F.K.; Hu, W.P.; Meng, Q.C.; Zhan, Z.X.; Shen, F. , A new damage-mechanics-based model for rolling contact fatigue analysis of cylindrical roller bearing. Tribol Int 2018, 120, 105–114. [Google Scholar] [CrossRef]
- Halme, J.; Andersson, P. , Rolling contact fatigue and wear fundamentals for rolling bearing diagnostics - state of the art. P I Mech Eng J-J Eng 2010, 224, 377–393. [Google Scholar] [CrossRef]
- Vijay, A.; Sadeghi, F. , A crystal plasticity and cohesive element model for rolling contact fatigue of bearing steels. Tribol Int 2022, 173. [Google Scholar] [CrossRef]
- Li, C.; Chen, Z.W.; Chen, X.X.; Liu, Z.T.; Han, X. , Microstructure evolution analysis of aviation bearing in service process based on CPFEM. Eng Fail Anal 2022, 142. [Google Scholar] [CrossRef]
- Raje, N.; Sadeghi, F.; Rateick, R.G.; Hoeprich, M.R. , A numerical model for life scatter in rolling element bearings. J Tribol-T Asme 2008, 130. [Google Scholar] [CrossRef]
- Zhao, J.J.; Jiang, H.K.; Xu, X.R.; Li, Y.F.; Qi, B.B.; Yu, H.W. , Fatigue life prediction of the preload double-nut ball screw under mixed lubrication. Int J Adv Manuf Tech 2023, 124, 4385–4401. [Google Scholar] [CrossRef]
- Liu, G.S.; Wei, P.T.; Liu, H.J.; Du, X.S.; Hu, R.; He, H.L.; Zhou, P.L.; Tan, X.Q. , Transmission accuracy-axial backlash-fatigue life-driven tolerance optimization of planetary roller screw mechanism. J Comput Des Eng 2023, 10, 2401–2421. [Google Scholar] [CrossRef]
- Niu, M.; Ma, S.; Cai, W.; Zhang, J.; Liu, G. , Fault Diagnosis of Planetary Roller Screw Mechanism Based on Bird Swarm Algorithm and Support Vector Machine. Journal of Physics: Conference Series 2020, 1519, 012007. [Google Scholar] [CrossRef]
- Pan, H.Y.; Xu, H.F.; Zheng, J.D.; Tong, J.Y. , Non-parallel bounded support matrix machine and its application in roller bearing fault diagnosis. Inform Sciences 2023, 624, 395–415. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Ji, J.C.; Ren, Z.H.; Ni, Q.; Gu, F.S.; Feng, K.; Yu, K.; Ge, J.; Lei, Z.H.; Liu, Z. , Digital twin-driven partial domain adaptation network for intelligent fault diagnosis of rolling bearing. Reliability Engineering & System Safety 2023, 234. [Google Scholar]
- Shi, Z.F.; Liu, J. , A novel test rig for the investigation of roller-cage impacts of a needle roller bearing. Meas Sci Technol 2023, 34. [Google Scholar] [CrossRef]
- Wang, R.; Ding, X.X.; He, D.; Li, Q.C.; Li, X.; Tang, J.; Huang, W.B. , Shift-Invariant Sparse Filtering for Bearing Weak Fault Signal Denoising. Ieee Sens J 2023, 23, 26096–26106. [Google Scholar] [CrossRef]
- Liu, D.; Cui, L.; Wang, H. , Rotating Machinery Fault Diagnosis Under Time-Varying Speeds: A Review. Ieee Sens J 2023, 23, 29969–29990. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, L.; Gao, H.L.; Dong, D.W.; Fu, G.Q.; Hong, X. , Instance-based ensemble deep transfer learning network: A new intelligent degradation recognition method and its application on ball screw. Mech Syst Signal Pr 2020, 140. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Zhou, C.G.; Nie, C.H.; Feng, H.T. , Remaining useful life prediction of ball screw based on integrating preload and precision. Meas Sci Technol 2024, 35. [Google Scholar] [CrossRef]
- Li, P.; Jia, X.D.; Feng, J.S.; Davari, H.; Qiao, G.; Hwang, Y.; Lee, J. , Prognosability study of ball screw degradation using systematic methodology. Mech Syst Signal Pr 2018, 109, 45–57. [Google Scholar] [CrossRef]
- Han, C.F.; He, H.Q.; Wei, C.C.; Horng, J.H.; Chiu, Y.L.; Hwang, Y.C.; Lin, J.F. , Techniques developed for fault diagnosis of long-range running ball screw drive machine to evaluate lubrication condition. Measurement 2018, 126, 274–288. [Google Scholar] [CrossRef]
- Riaz, N.; Shah, S.I.A.; Rehman, F.; Khan, M.J. , An Intelligent Hybrid Scheme for Identification of Faults in Industrial Ball Screw Linear Motion Systems. Ieee Access 2021, 9, 35136–35150. [Google Scholar] [CrossRef]
- Huang, Y.C.; Hsieh, Y.K. , Applying a support vector machine for hollow ball screw condition-based classification using feature extraction. P I Mech Eng B-J Eng 2022, 236, 1839–1852. [Google Scholar] [CrossRef]
- Giberti, H.; Carnevale, M.; Bocciolone, M. , A Power Recirculating Test Rig for Ball Screws: A New Perspective for Endurance Tests. Machines 2020, 8. [Google Scholar] [CrossRef]
- Zhang, X.C.; Luo, T.J.; Han, T.; Gao, H.L. , A novel performance degradation prognostics approach and its application on ball screw. Measurement 2022, 195. [Google Scholar] [CrossRef]
- Breuneval, R.; Clerc, G.; Nahid-Mobarakeh, B.; Mansouri, B.; Guyamier, A. , Identification of a roller screw for diagnosis of flight control actuator. 2016 Ieee International Conference on Prognostics and Health Management (Icphm), (2016).
- Chirico, A.J.; Kolodziej, J.R. , A Data-Driven Methodology for Fault Detection in Electromechanical Actuators. J Dyn Syst-T Asme 2014, 136. [Google Scholar] [CrossRef]
- Riaz, N.; Shah, S.I.A.; Rehman, F.; Gilani, S.O.; Udin, E. , A Novel 2-D Current Signal-Based Residual Learning With Optimized Softmax to Identify Faults in Ball Screw Actuators. Ieee Access 2020, 8, 115299–115313. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Wang, L.Z.; Peng, G.L.; Li, S.J. , WDA: An Improved Wasserstein Distance-Based Transfer Learning Fault Diagnosis Method. Sensors-Basel 2021, 21. [Google Scholar] [CrossRef]
- Chang, M.C.; Liou, J.L.; Wei, C.C.; Horng, J.H.; Chiu, Y.L.; Hwang, Y.C.; Lin, J.F. , Fractal Analysis for Vibrational Signals Created in a Ball-Screw Machine Operating in Short- and Long-Range Tribological Tests. J Tribol-T Asme 2013, 135. [Google Scholar] [CrossRef]
- Shan, P.F.; Lv, H.; Yu, L.M.; Ge, H.H.; Li, Y.; Gu, L. , A Multisensor Data Fusion Method for Ball Screw Fault Diagnosis Based on Convolutional Neural Network With Selected Channels. Ieee Sens J 2020, 20, 7896–7905. [Google Scholar] [CrossRef]
- Pandhare, V.; Li, X.; Miller, M.; Jia, X.D.; Lee, J. , Intelligent Diagnostics for Ball Screw Fault Through Indirect Sensing Using Deep Domain Adaptation. Ieee T Instrum Meas 2021, 70. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Ro, S.K.; Park, J.K. , Study of ball screw system preload monitoring during operation based on the motor current and screw-nut vibration. Mech Syst Signal Pr 2019, 131, 18–32. [Google Scholar] [CrossRef]
- Yin, C.; Wang, Y.L.; He, Y.; Liu, L.; Wang, Y.; Yue, G.N. , Early fault diagnosis of ball screws based on 1-D convolution neural network and orthogonal design. P I Mech Eng O-J Ris 2021, 235, 783–797. [Google Scholar] [CrossRef]
- Azamfar, M.; Li, X.; Lee, J. , Intelligent ball screw fault diagnosis using a deep domain adaptation methodology. Mech Mach Theory 2020, 151. [Google Scholar] [CrossRef]
- Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. , Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws. Actuators 2021, 10. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Yang, Y.; Shen, G.J.; Chen, L.; Hu, N.Q. , Eight-DOF Dynamic Modeling of EMA Mechanical Transmission and Spalling Fault Characteristic Analysis. Actuators 2022, 11. [Google Scholar] [CrossRef]
- Ismail, M.A.A.; Balaban, E.; Windelberg, J. , Spall Fault Quantification Method for Flight Control Electromechanical Actuator. Actuators 2022, 11, 29. [Google Scholar] [CrossRef]
- Butler, Q.; Ziada, Y.; Stephenson, D.; Gadsden, S.A. , Condition Monitoring of Machine Tool Feed Drives: A Review. J Manuf Sci E-T Asme 2022, 144. [Google Scholar] [CrossRef]
Figure 1.
Classification, industrial status and applications of planetary roller screw mechanism. (Images from Bing).
Figure 1.
Classification, industrial status and applications of planetary roller screw mechanism. (Images from Bing).
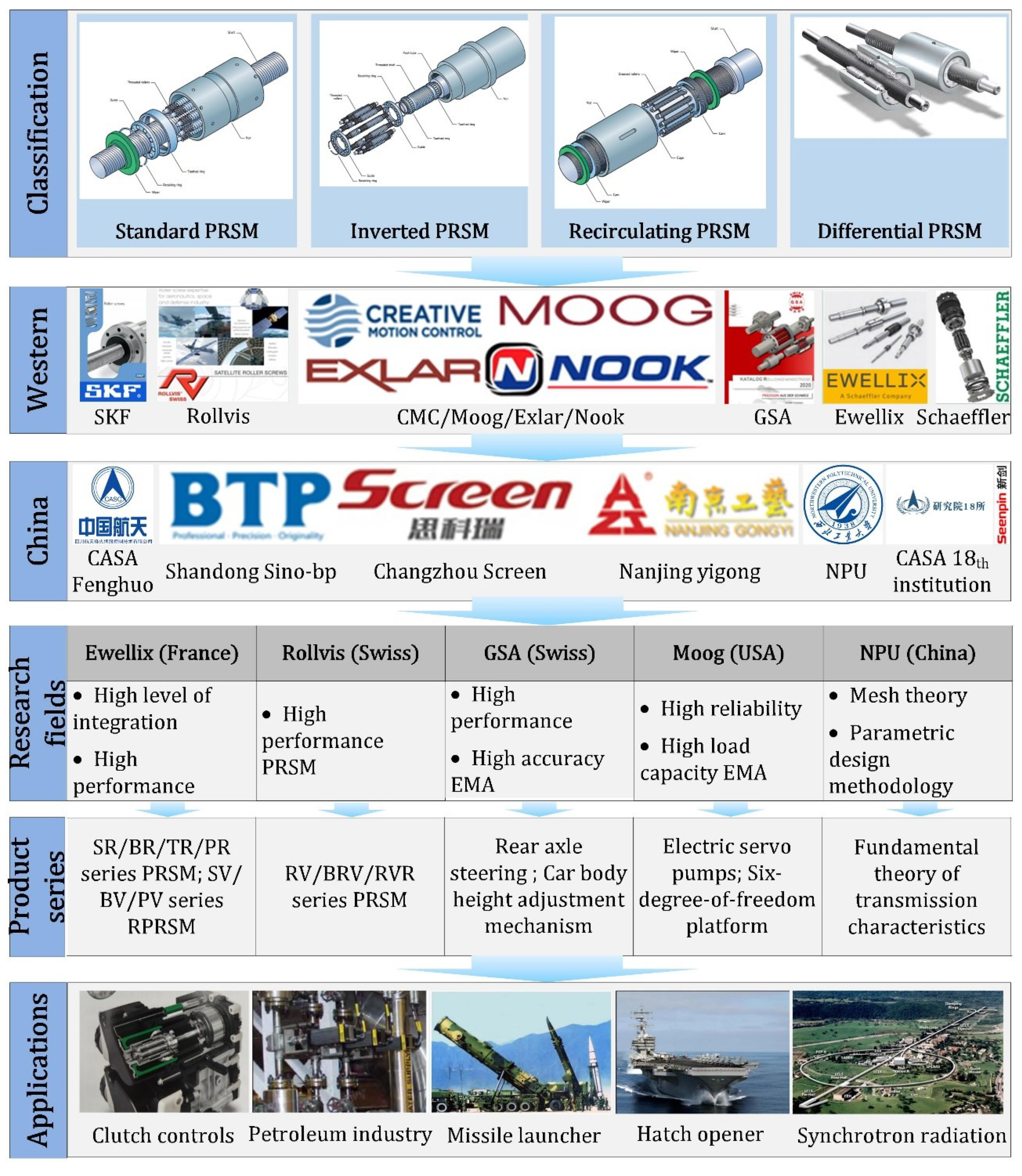
Figure 2.
Organization diagram for general content of this review article.
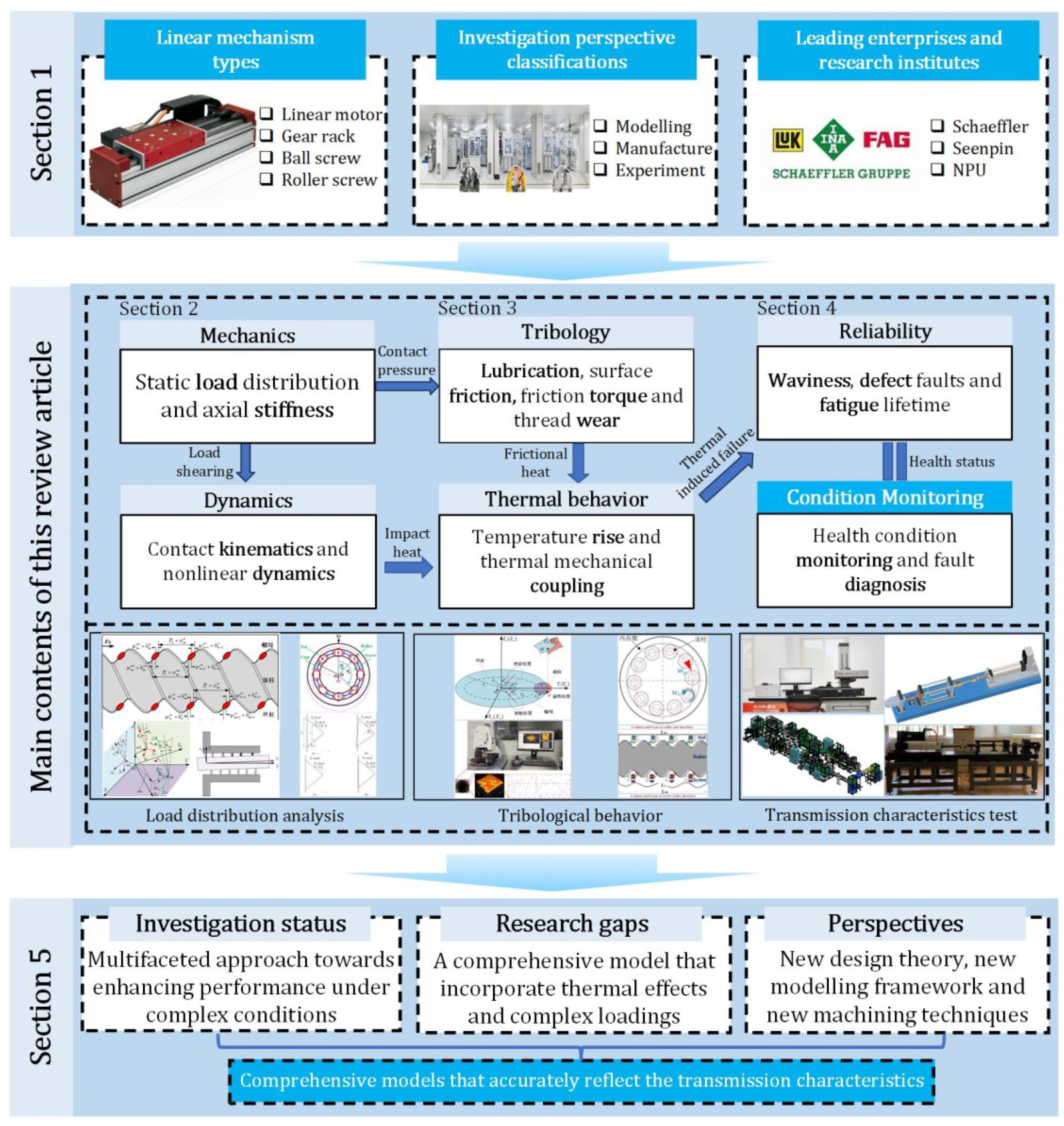
Figure 3.
Load distributions of PRSM with geometric errors under axial load. (a) Index errors of the screw [49] (b) Finite element model of the multi roller PRSM [50] (c) Load distribution with position errors (d) Roller pitch error.
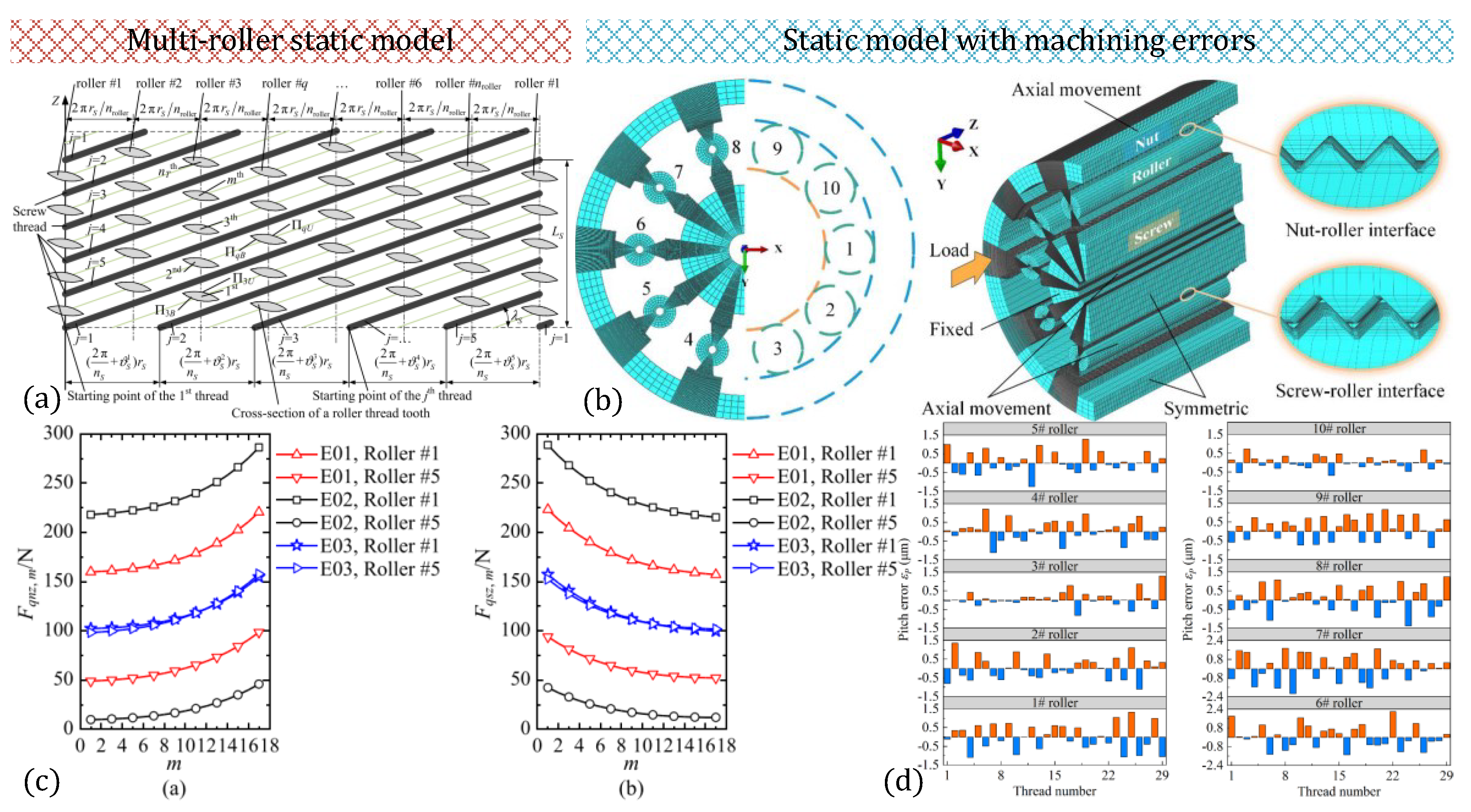
Figure 5.
Force analysis of the PRSM and feed drive system (a) Internal force of the PRSM [72] (b) 14 degree-of-freedom dynamic model of the feed drive system [74] (c) Transient behavior of PRSM for efficiency and rotational velocity ratio (d) Amplitude-frequency curves with different preloads.
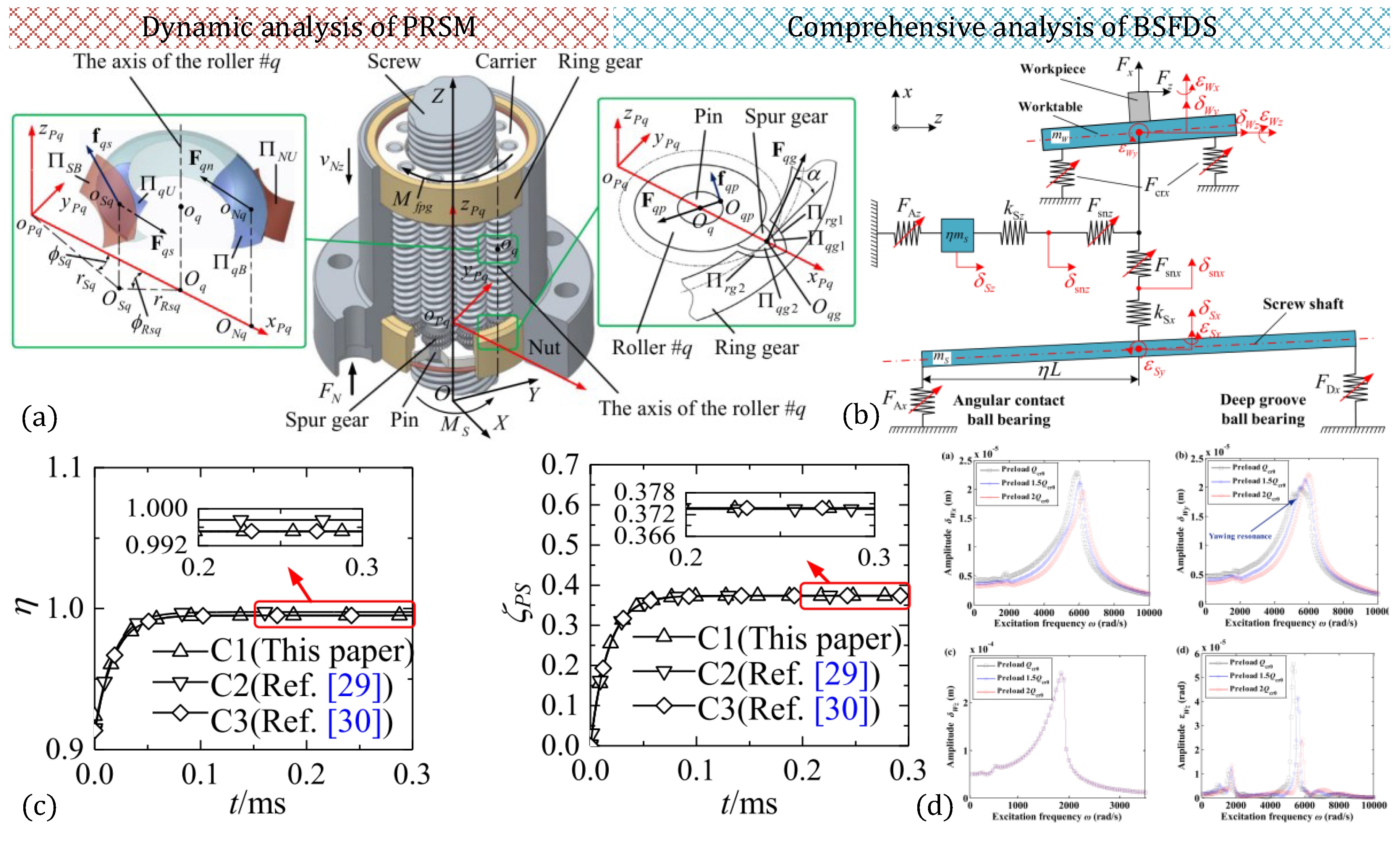
Figure 6.
Lubrication status of the PRSM (a) Dimensionless film thickness and pressure with varying speed [81] (b) Lubrication performance with dynamic friction offset torque of single roller [82] (c) Film thickness and pressure distributions on the screw-roller interface [83].
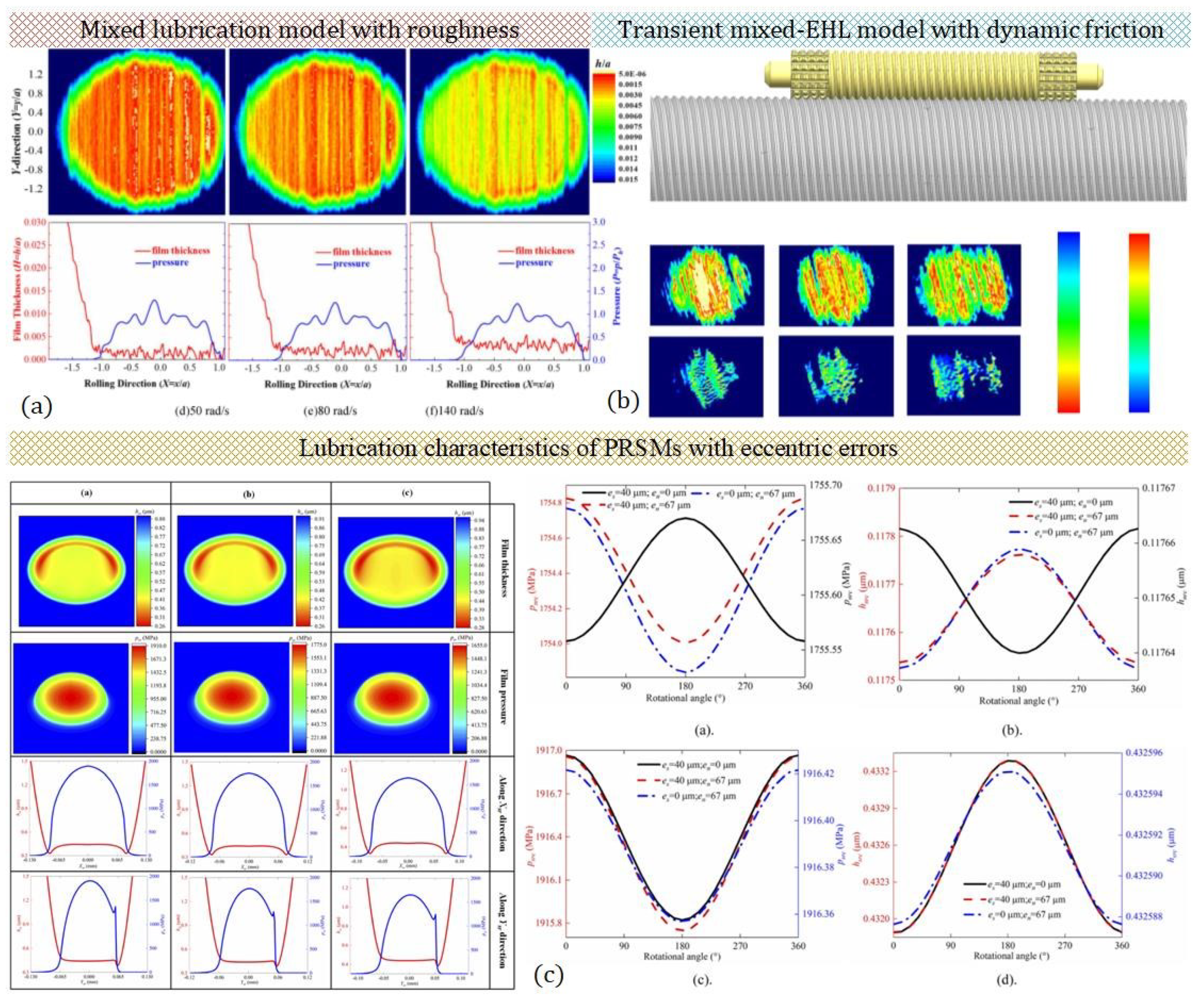
Figure 7.
Wear topography of PRSM (a) Test rig of the transverse sliding [85] (b) Optical and interferometry observation of the test track (c) Sliding distance distribution [86] (d) Accumulative wear depth.
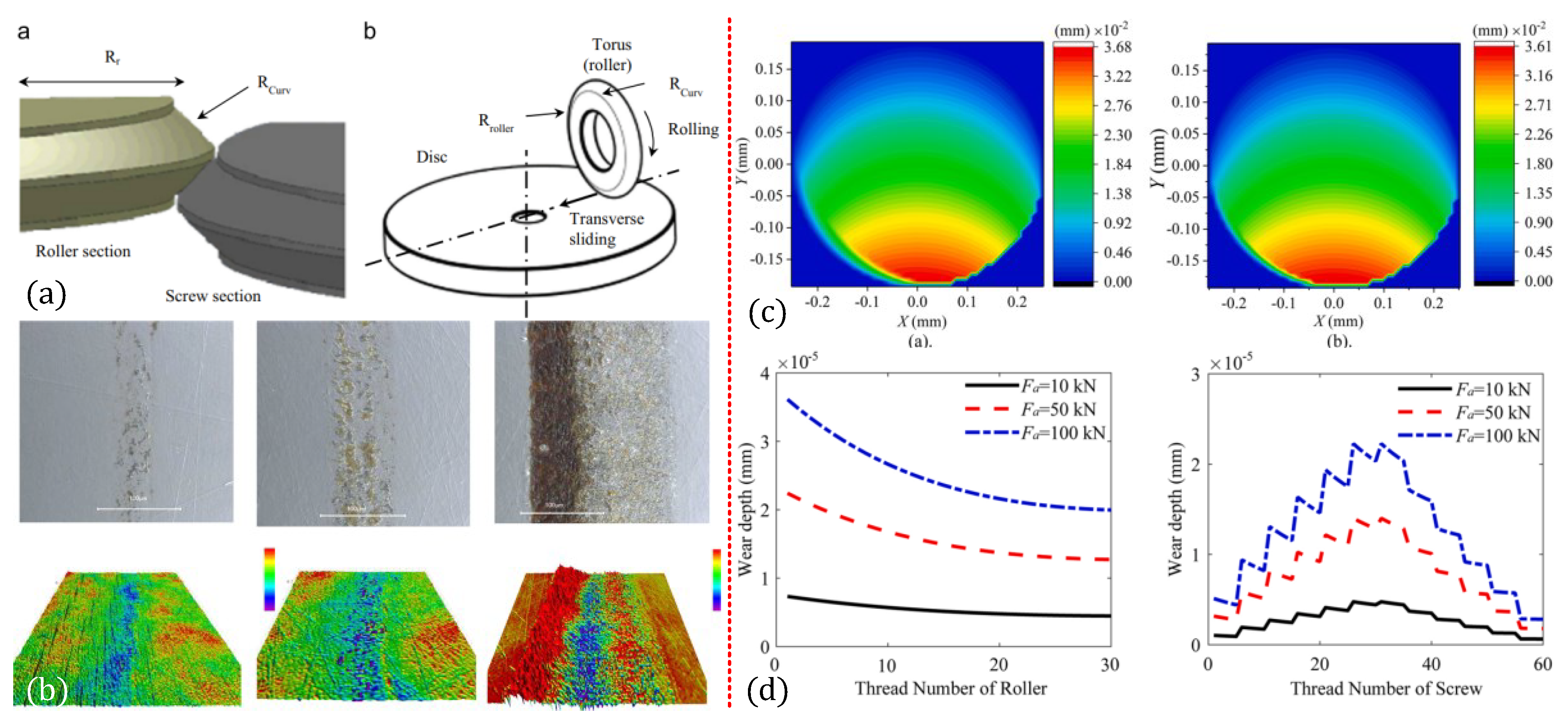
Figure 8.
Efficiency and friction torque of PRSM (a) The angular motion of the screw and roller [62] (b) mechanism efficiency of the roller screw (c) The coordinate system and elastic contact interface [98] (d) The effect of Heathcote sliding on the friction force.
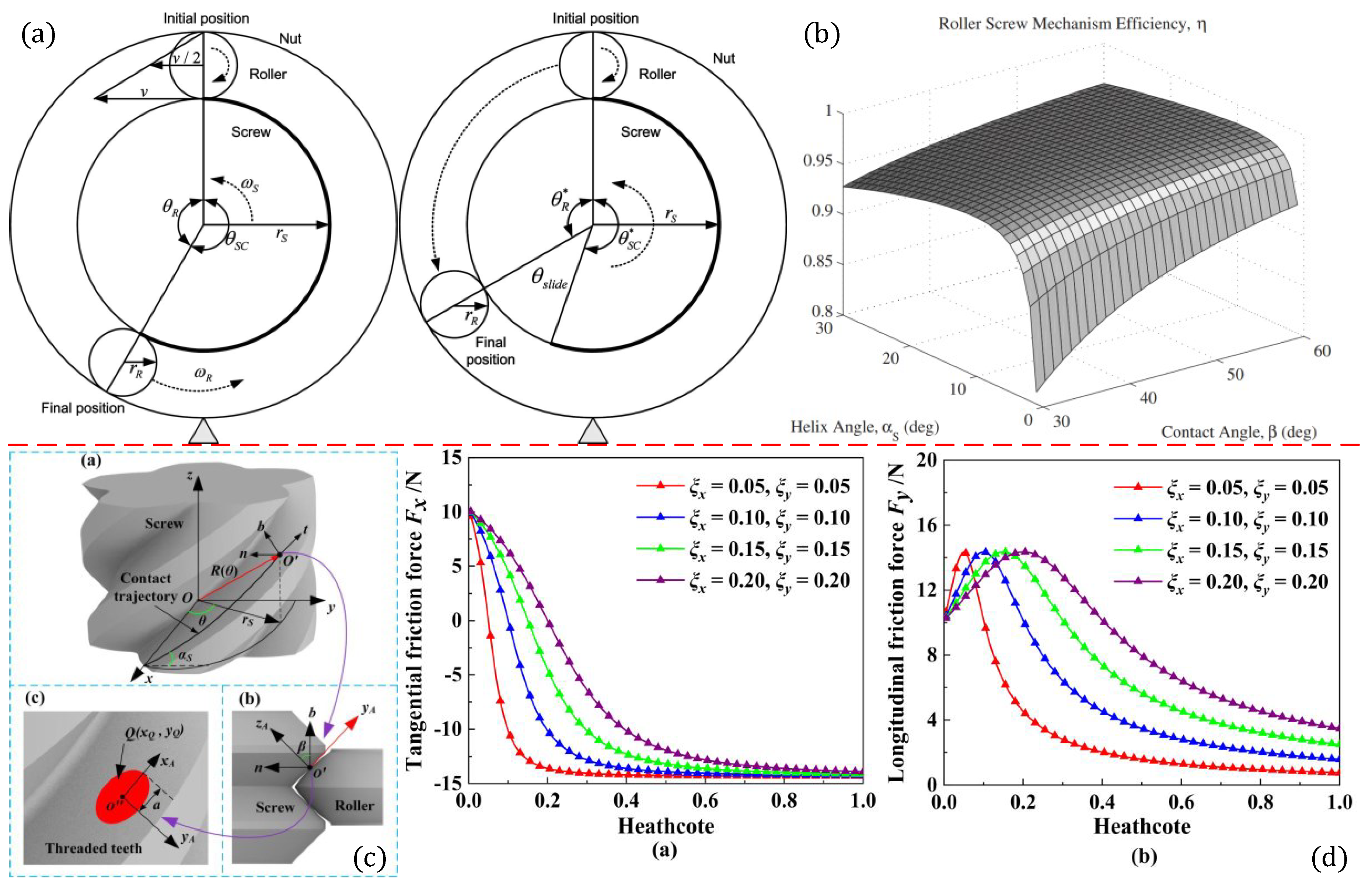
Figure 10.
Reliability assessment of PRSM (a) Comparison between the initial and the optimized PRSM [123] (b) Circumferential and axial surface waviness [124] (c) Effect of the waviness amplitude on the time-varying axial contact clearances and contact forces.
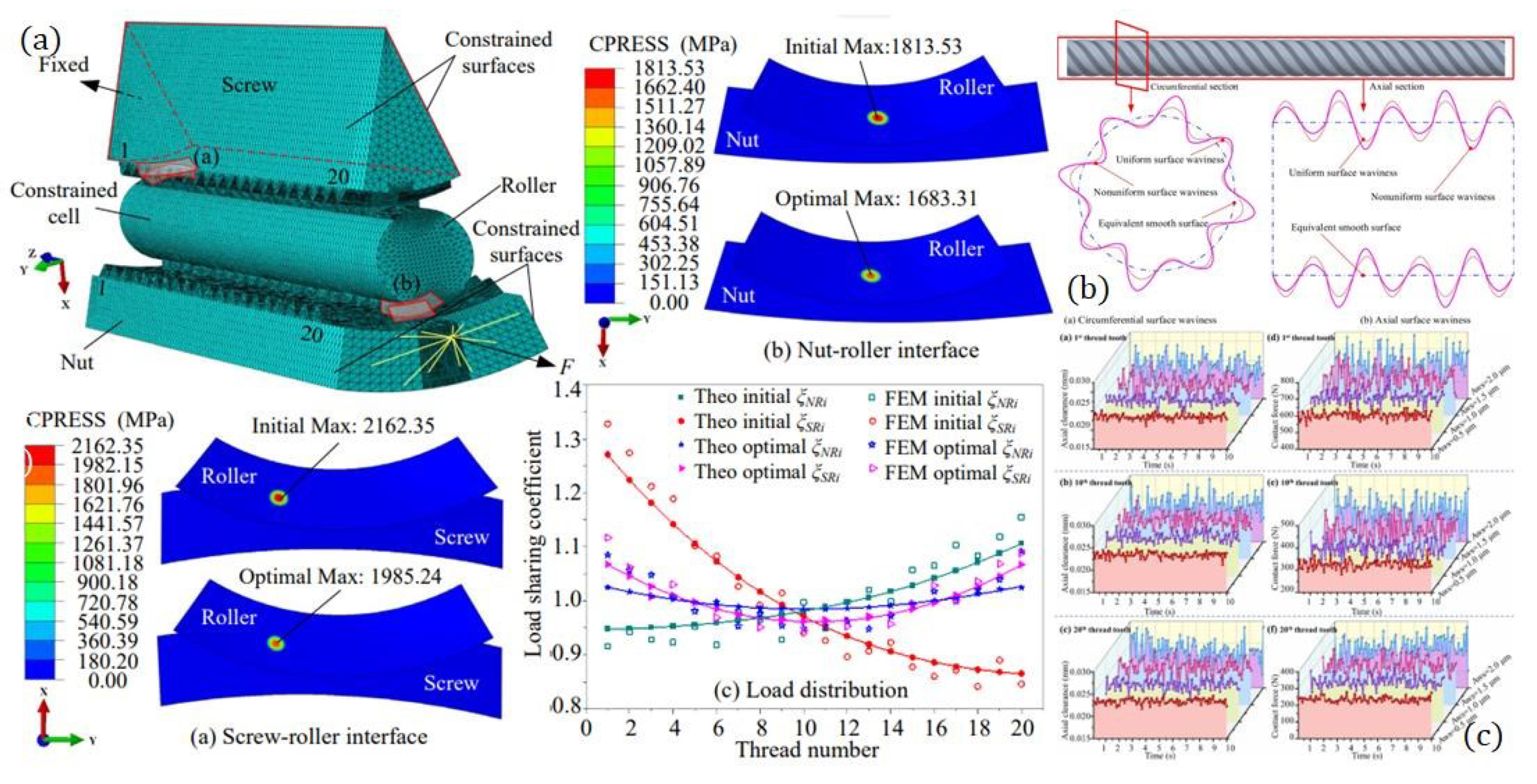
Figure 11.
Fatigue life time of PRSM and BSM (a) orientation of the contact normal and sliding velocity [131] (b) Color map of Von Mises stress (c) Deformation coordination of BSM with joint load [132] (d) Contact load of all balls with positive error.
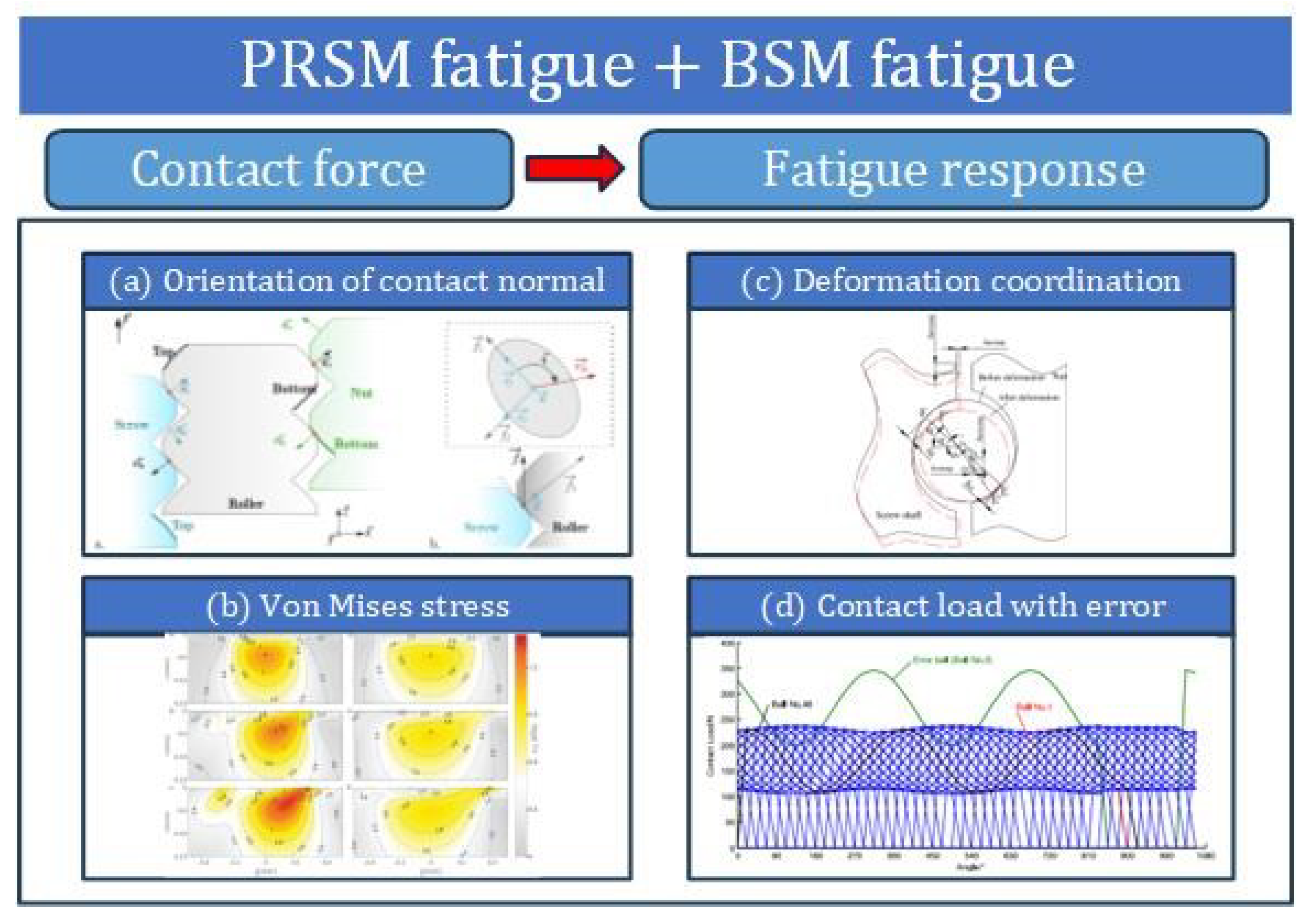
Figure 12.
Fault diagnosis methodology of PRSM and EMA (a) Process of prognosis and health management [154] (b) Position, speed and torque load acquired for identification (c) EMA laboratory signal diagram [155] (d) classification of healthy and faulty conditions.
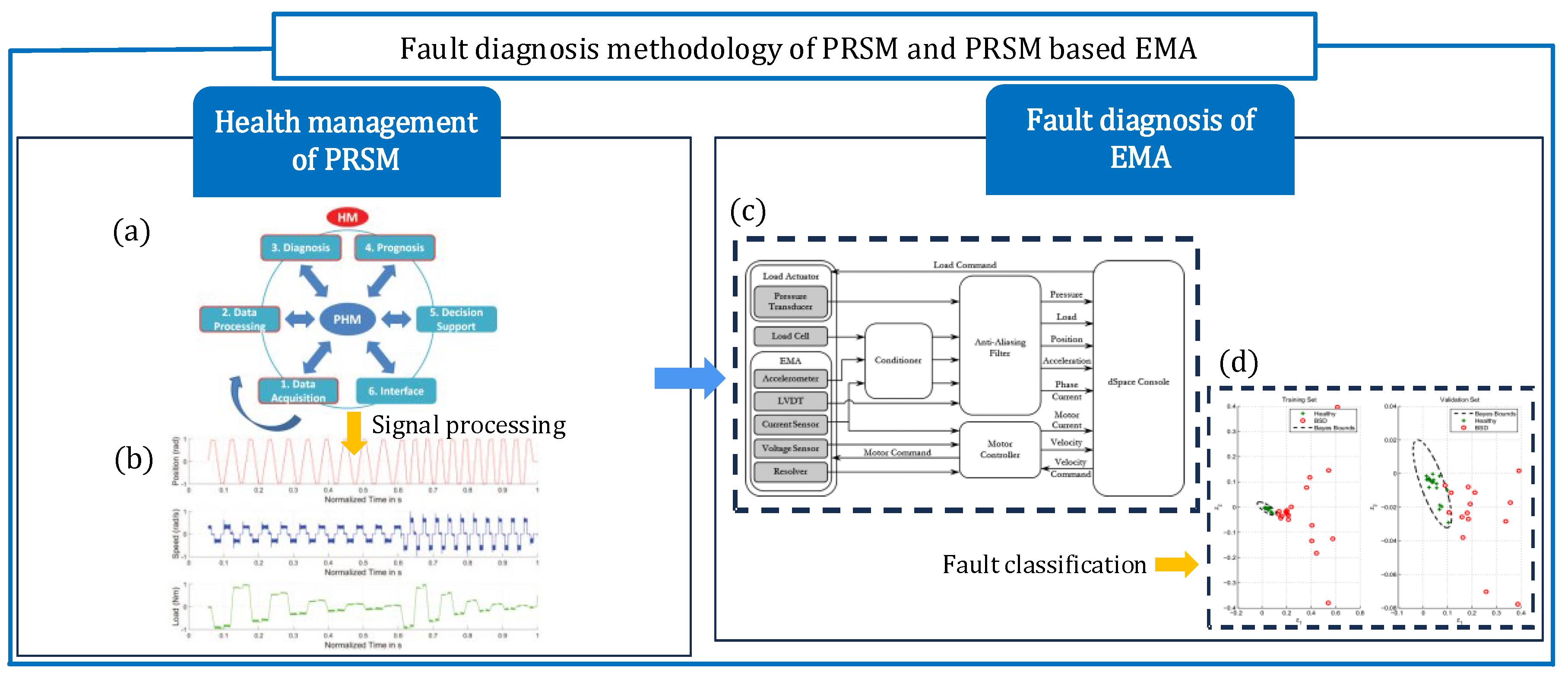
Table 1.
Performance comparison of linear mechanism. (++: Very High, +: High, ±: Medium, −: Low, −−: Very Low, ✓: Present/Yes, ✗: None/No, N/A: Not Applicable or Not Available).
Table 1.
Performance comparison of linear mechanism. (++: Very High, +: High, ±: Medium, −: Low, −−: Very Low, ✓: Present/Yes, ✗: None/No, N/A: Not Applicable or Not Available).
| Feature | Linear Motor | Pneumatic Servo System | Hydraulic Servo System | Gear Rack System | Ball Screw Mechanism | Planetary Roller Screw |
| Load Capacity | − | + | ++ | + | + | ++ |
| Rigidity | ± | − | + | + | ± | + |
| Lifespan | + | + | + | + | + | ++ |
| Speed | + | ++ | ± | + | ± | ++ |
| Efficiency | N/A | ± | ± | ++ | ++ | + |
| Friction | − | ± | − | − | − | − |
| Shock Resistance | + | + | ++ | + | ++ | ++ |
| Controllability | Easy | Very Difficult | Difficult | Easy | Easy | Easy |
| Leakage | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ |
| Relative Size | − | + | + | + | ± | − |
| Installation | Simple | Complex | Complex | Simple | Simple | Simple |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



