Submitted:
14 May 2024
Posted:
16 May 2024
You are already at the latest version
Abstract
The lack of defect image data is one of the main factors affecting the accuracy of supervised deep learning-based defect detection models. In response to the insufficient training data of defect images with complex backgrounds such as rust and surface oil leakage in substation equipment, leading to poor performance of the detection model, this paper proposed a novel adversarial deep learning model for substation defect generation: ADD-GAN. In comparison to existing generative adversarial networks, this model generates defect images based on effectively segmented local areas of substation equipment images, avoiding image distortion caused by global style changes. Additionally, the model utilizes a joint discriminator for overall image and defect image to address the issue of low attention to local defect areas, thereby improving the loss of image features. This enhances the overall quality of generated images as well as locally generated defect images, ultimately improving image realism. Experimental results demonstrate that the YOLOV7 object detection model trained on the dataset generated using the ADD-GAN method achieves an mAP of 81.5% on the test dataset, representing an improvement of 9.6% over the original dataset, 5.7% over traditional augmentation methods, and 7% over typical adversarial deep learning methods. This confirms that the ADD-GAN method can generate a high-fidelity dataset of substation equipment defects.
Keywords:
Generation of defect images for substation equipment
; GAN
; Local region defect generation
; Joint discriminator for overall image and defect image
1. Introduction
The substation achieves the transmission of electricity from power plants to end-users through the conversion of high and low voltages and is an indispensable part of the power system. Monitoring the operational status of substations is crucial for the stable operation of the power grid. In the past, the detection of defects in substations, such as rust, oil leakage, damaged dials, and fractured insulators, was typically carried out through manual inspection, which was time-consuming and labor-intensive [1]. With the development of remote observation technologies for substations, images captured by cameras can be used to remotely monitor the equipment’s operational status. However, even the assessment of defects in equipment images is often done manually. During the prolonged image screening process, manual judgment can lead to eye fatigue, resulting in potential errors, omissions, and subjective biases. With the continuous improvement of smart grid construction, it is imperative to implement unmanned and intelligent monitoring for substations [2]. Automatically detecting equipment images through image processing methods not only avoids errors caused by subjective factors but also enhances the detection efficiency and level of intelligence in substations [3].
In recent years, with the construction of smart substations, the application of unmanned visual monitoring systems, ground inspection robots, and aerial inspection drones has gradually become widespread [4,5]. An increasing number of surface defect detection methods for substation equipment based on deep learning have been applied in practical inspection tasks [6,7,8,9]. These methods are often improvements upon supervised object detection models like YOLO, effectively enhancing the detection performance of surface defects in substation instruments. This provides favorable conditions for the intelligent monitoring of unmanned substations.
The surface defect detection methods for substation equipment based on supervised deep learning mentioned above require a sufficient amount of training dataset to support their accuracy. However, the construction of surface defect datasets for substation equipment faces the following challenges: (1) In the process of routine inspection and monitoring data collection, normal images of substation equipment overwhelmingly outnumber defective images [10]. This imposes a significant workload on the manual screening and classification of defective images. (2) There is a considerable variation in manual expertise, leading to significant differences in the collection, classification, and annotation quality of defective images, making it difficult to ensure the quality of subsequent dataset construction. (3) Current dataset augmentation primarily relies on techniques such as image rotation, stretching, and brightness transformation, with limited utilization of image super-pixel features. This results in high redundancy of the dataset and poor improvement of recognition and detection models.
To address the aforementioned issues, many studies have applied data augmentation methods to various fields such as insulator fault detection in diverse aerial images [11], surface defect detection in industrial components [12], etc. These studies have conducted research on image generation methods based on superpixel features. Through generative models such as auto-encoders (AE) [14] and generative adversarial networks (GAN) [15], they generate new images with complex backgrounds and diverse features. This process helps in constructing training datasets with higher richness, thereby further enhancing the performance of defect classification and detection models. Di Maggio et al. [16] proposes a novel method using CycleGAN [17] to generate data for damaged industrial machinery. By training the generative model, it transforms wavelet images simulating vibration signals into real data from mechanically damaged bearings. To enhance the efficiency and lower the expense of detecting cracks in large-scale concrete structures, Liu et al [18]. generated a large number of artificial samples from existing concrete crack images by DCGAN [19], and the artificial samples were balanced and feature-rich. Zhuang et al. [20] employed a generative adversarial network based on Defect-GAN [21] to augment and expand a small sample image dataset of plastic label defects. This method, by simulating the process of defect generation and defect image reconstruction, can synthesize defect samples with high fidelity and diversity. To address the issue of limited samples of abnormal defect images on the surface of trains, Liu et al.[13] proposed an Anomaly-GAN based on mask pool, abnormal aware loss, and local versus global discriminators. This method preserves the global and local authenticity of the generated defect images.
Although the aforementioned image enhancement methods based on adversarial deep learning generate new industrial defect images, there are still several drawbacks when applied to the generation of substation equipment defect images: (1) Substation equipment images are captured in real-world environments with complex backgrounds. The processing steps in the mentioned methods intentionally weaken complex backgrounds, presenting a limitation in existing adversarial deep learning methods, as they can only transform the overall image style and not specifically the style within the region of interest. (2) Substation equipment defect images exhibit complex features such as rust and oil leakage, which not only change the color of the equipment surface but also include rich texture features. The GAN-based methods mentioned above primarily focus on simple defects like scratches and ink dots, which are easier to generate compared to the more challenging and diverse defects found in substation equipment, leading to higher success rates. (3) The quality of generated images needs further improvement. Existing GAN methods often encounter mode collapse during the training process, blurring the details of the generated defects. Furthermore, if the generated images lack realism and stability, the relationship between the generated defects and the overall image becomes conspicuously unnatural.
To address the aforementioned challenges, we proposes an abnormal defect detection generative adversarial network (ADD-GAN) model tailored for typical substation defects like rust and oil leakage. The key contributions and innovations are summarized as follows: (1) Effective Region Extraction: The ADD-GAN model can extract effective generation regions in the complex background of original images. By transforming regions of normal equipment images into images with defects such as rust and oil leakage, it resolves the issue of an insufficient number of original defect images. (2) Local Region Defect Generation: Introducing a local region defect generation network, ADD-GAN generates defects on substation equipment images based on the extraction of effective generation regions. This approach avoids a decrease in image realism caused by transforming features across the entire image. (3) Joint Discriminator for Overall Image and Defect Image: ADD-GAN introduces a joint discriminator for overall image and defect image, enhancing the quality of generated defect images. This method focuses on generating defect images in specific regions of substation equipment while ensuring the overall quality of the generated images, thus avoiding distortion caused by changes in the global image style. (4) Loss Function Design: The ADD-GAN model is designed with global perceptual adversarial loss, local defect perceptual loss, and cycle consistency loss. This ensures the realism of the overall image, the rationality of locally generated defect images, and prevents mode collapse.
2. Dataset Preparation
Transformer and other equipment are crucial components for the normal operation of power systems. Incidents such as surface oil leakage and rust can adversely affect the proper functioning of these devices, posing potential safety hazards when severe. The visual manifestations of surface rust and oil leakage are depicted in Figure 1, making them essential inspection targets during both manual and automated inspections. However, during inspections, obtaining normal images of substation equipment is more common, with a relatively small overall quantity of defective images and an imbalance in the number of images between classes. Therefore, image generation is carried out for the above two types of defects.
We obtained 700 images of surface defects in substation equipment through on-site scene collection, comprising 353 images of surface oil leakage and 347 images of metal rust. We also collected 1200 images of normal equipment. It is noteworthy that the collection of normal equipment images was significantly less challenging compared to the images of the other two types of defects.
3. Materials and Methods
This section introduces three concepts and their principles: local defect image augmentation, the ADD-GAN model, and the objective loss function. These are employed for generating corresponding equipment defect images.
3.1. Local Defect Image Augmentation
To fulfill the data quantity demands of deep learning models, this section introduces a method for local defect image augmentation to increase the diversity of abnormal samples.
Elements in the defect image dataset have two main sources. The first source involves manually segmenting local defect images based on prior knowledge from the collected original dataset of equipment defect images. The second source includes local defect images based on expert experience drawn by experts using tools. The two types of images, namely the defect images created by experts and the generated defect images, show variations in size, form, and spatial arrangement. To ensure the authenticity of the expert-created defect images, we follow specific guidelines during the drawing process that correspond to real-world scenarios. After generating new defect images, an expert evaluation approach is used to assess the accuracy and reasonableness of the expert-created defects. Ten experts evaluate the plausibility of the new images, and the resulting score for each image is calculated as the average of the expert ratings. Subsequently, the defect images drawn by experts that fall within the top 15% are retained.
In order to further enhance the quantity and variety of new samples, we employ random repositioning, rotation, and scaling techniques for defect images from both groups. Moreover, various defect components are randomly merged together to introduce a larger number of defects within a single image. This approach effectively reduces the manual drawing work burden. By combining these artificially generated defects with real collected images, we form the training dataset for subsequent GAN model training.
3.2. ADD-GAN Algorithm
3.2.1. Algorithm Principle of GAN Model
Generative Adversarial Network(GAN)) is a widely used image generation model. It learns from a set of data and generates similar data. The GAN model consists of two parts: the generative model and the discriminative model. The generator captures the distribution of sample data and uses noise z following a certain distribution (Uniform distribution, Gaussian distribution, etc.) to generate a sample resembling real training data. The goal of the generator is to produce samples that become increasingly similar to real samples.
The discriminator is a binary classifier used to estimate the probability that a sample comes from the training data rather than the generated data. If the sample comes from real training data, the discriminator outputs a high probability; otherwise, it outputs a low probability. During the training process, the GAN model fixes one of the generator G or discriminator D, updates the weights of the other, and iterates alternately. The formula is as follows:
where represents the distribution of real sample x. shows the distribution of random sample z. is the difference between P and Q. The purpose of the generator is to minimize as much as possible while keeping the discriminator fixed, and the purpose of the discriminator is to maximize while keeping the generator fixed. During the training process, both the generator and the discriminator continuously optimize their networks, forming a competitive objective until both parties reach a Nash equilibrium. At this point, the generator can generate samples identical to the real data distribution, and the discriminator achieves an accuracy of 50% in discriminating generated samples. The final generative model is then used to generate the required data.
The majority of existing GAN models generate defect images with unclear local details and limited image diversity. However, supervised defect detection models necessitate training with defect images characterized by a high degree of diversity and distinct details. To overcome this challenge, this paper introduces the ADD-GAN model, depicted in Figure 2. ADD-GAN operates on the principle of transforming one class of images into another. It involves two sample spaces, denoted as X and Y, representing the sets of normal equipment image samples and images with oil leakage or rust, respectively. The objective is to transform samples from space X to space Y. Therefore, the goal of ADD-GAN is to learn the mapping function G from X to Y. G corresponds to the generator in the ADD-GAN network model, capable of generating an image in space Y from an image x in space X. For the generated image , the discriminator in ADD-GAN is employed to determine whether it is a real image, forming an adversarial neural network. The ADD-GAN model facilitates the bidirectional transformation between normal and defective images. In this study, the focus is primarily on converting normal images of substation equipment into defective images.
3.2.2. Local Region Defect Generation Network
At present, image generation methods using GAN networks often prioritize texture transformation for the overall image while neglecting the fine-grained defect features in small regions. In other words, not only do defective images generate on the surface of substation equipment, but the overall style of the entire image also undergoes changes. To address these issues, this paper introduces a Local Region Defect Generation Network during the image generation stage. Through image segmentation, it initially isolates the region for defect generation. Subsequently, local style transformation and defect generation are applied to this segmented region. This modification enhances the performance of ADD-GAN in the generation of semantic features for small region defects.
In this paper, an encoder-decoder network based on the U-shaped architecture (U-Net)[22] is designed to constitute the local region defect generator model, as shown in Figure 3. The U-Net was initially employed in the field of medical image processing for segmenting medical images. Improved from a fully convolutional neural network, the U-Net is named after its shape resembling the letter ”U”. It consists of an encoding path and a decoding path. The encoding path is a typical convolutional neural network, comprising a repetitive functional structure. Each structure employs the combination function ConV-BN-ReLU-ConV-BN-ReLU for the processing of feature maps along the path, where ConV stands for convolution, BN for batch normalization, and ReLU for rectified linear units. After each downsampling, the number of feature channels is doubled. In the decoding path, each step begins with the use of the transposed convolution (ConvTranspose) operation, where the feature map size is doubled and the number of feature channels is halved after each transposed convolution. Following the ConvTranspose, the result is concatenated with the corresponding-sized feature map from the encoding path and propagated backward. This encoding and decoding process, along with feature concatenation, allows for better fusion of shallow pixel position features with deep pixel category features, improving the utilization of image features and contributing to enhanced image generation. Therefore, this study employs the U-Net architecture instead of the fully convolutional neural network architecture, and designs the local region defect generator model.
As shown in Figure 3, the input to the generator includes not only the normal device image but also one-dimensional mask information. This information is pre-set and can be obtained through manual annotation or generated automatically using deep learning-based image segmentation methods. During the image generation process, the original image and mask information are input together into the generator model. The generator utilizes the mask information to first segment the local area of the device in the original image where defects need to be generated. Subsequently, the required defects are generated in the segmented area. After completing the defect generation, the output result replaces the mask region on the original image, completing the generation of the defect image. This approach not only retains the advantages of GAN model style transfer but also restricts the range of image style transformation to the desired local area, significantly enhancing the authenticity of generated defect images.
3.2.3. Joint Discriminator for Overall Image and Defect Image
The evaluation of generated images primarily focuses on two aspects. Firstly, it assesses whether the overall image accurately represents the characteristics of substation equipment. Secondly, it checks whether the generated defects align with the image features of oil leakage and rust defects. To address these criteria, this study proposes a joint discriminator for both the overall image and the defect image. This discriminator comprises two subnets: the defect region subnet and the whole image subnet. By constricting the image into feature maps, the discriminator combines the outputs of these subnets through a concatenation operation. This process judges the authenticity of the generated image, thus enhancing the quality of the generated defect. The diagram of the joint discriminator is illustrated in Figure 4.
As illustrated in Figure 4, the input of the overall image subnet is the generated entire image. This image is resized to pixels and fed into the whole image subnet. It goes through 4 times of ConV-BN-ReLU-ConV-BN-ReLU operations and is finally processed by a Sigmoid layer, which outputs a 1-dimensional vector. Similarly, the defect region segmented by the mask is resized to pixels and fed into the defect region subnet. It undergoes 4 rounds of ConV-BN-ReLU-ConV-BN-ReLU operations. Then, it is processed by a Sigmoid layer, which outputs a 1-dimensional vector. The output vectors of two subnets are concatenated together and pass through a Sigmoid layer, which outputs an overall score distributed within for the generated image. The magnitude of the score represents the probability of the image being authentic.
3.3. Loss Function
According to the structure of the ADD-GAN model, the designed loss function in this paper comprises three components: global perceptual loss, local defect perceptual loss, and cycle consistency loss[13]. The incorporation of the global perceptual loss in ADD-GAN facilitates the generation of defect images that possess both superior quality and diverse defects. The utilization of the local defect perceptual loss further enhances the detail authenticity of generated defects and semantic attributes. By incorporating the cycle consistency loss, ADD-GAN is able to generate defect images by learning image features from a limited collection of defective device images as well as a diverse range of normal device images.
3.3.1. Global Perceptual Loss
Many GAN models frequently encounter mode collapse, resulting in the generation of poor-quality and less diverse images. This paper presents the utilization of the D2 adversarial loss[23] for improving the robustness of model training and enhancing the variability of features in the generated images. To account for the discriminator’s need to evaluate both the local imperfections and overall textures in the generated images, we have devised a locally-perceptive-D2 loss, building upon the foundation of the original D2 loss. By incorporating the improved global perceptual loss, we are able to enhance the quality of region-specific defects in the generated images. This enhancement allows for a more accurate assessment and refinement of the local imperfections, ultimately resulting in higher-quality generated images. For the generator , responsible for transforming defect-free images into defective images, and its corresponding discriminator , the loss function is formulated as follows:
where represents the original defect-free image. represents the original device defect image. represents the original defect image in mask area. represents the generated image. represents the generated image in the mask region. Equation (2) can be viewed as a process where the goal is to maximize the discriminator’s ability to detect local defects, represented by , while simultaneously minimizing the discrepancy between the generated image and its corresponding normal image in terms of local defect perception, represented by . The higher the value of approaches 1, the more effectively the discriminator can differentiate the authentic sample. During the training phase, the discriminator is held fixed. If the generator performs more effectively, the discriminator may make misjudgments, erroneously classifying generated images as original images. This increases the value of , causing the latter part of Equation (2) to approach zero, thereby reducing the loss.
3.3.2. Local Defect Perceptual Loss
Since surface defects on devices often exist only in a small portion of the surface, to further focus on the quality of generating defects, this paper introduces a local defect perceptual loss in the generator section of the network, as shown below:
where represents the difference loss between the defect-free portion of the image generated within the segmented mask and the real defect-free image, and represents the difference loss between the defective portion of the image generated within the segmented mask and the real defective image. The design purpose of this loss component is to ensure the quality of images in both the defective and defect-free regions within the mask during the training of the generator. A smaller loss indicates higher quality of images within the mask.
3.3.3. Cycle Consistency Loss
In practical scenarios, the limited number of actual defect images compared to the abundant normal images may lead to a lack of diversity in the generated defect image features. This can be a challenge when using the local perceptual D2 loss to ensure both high quality and various characteristics in generated surface defect images. Therefore, this paper introduces cycle consistency loss[17] to prevent this situation and achieve the goal of generating defect images with rich features using normal images. The cycle consistency loss method assumes that a mapping can transform the already generated defect images back into the space of defect-free sample images, thereby establishing a one-to-one mapping relationship between normal sample images and defect sample images spaces, avoiding the problem of monotonous features in generated defect sample images. The cycle consistency loss can be represented as follows:
3.4. Optimizer
The training of a GAN model is a continuous game between the generator and discriminator models, involving the search for a Nash equilibrium point in a highly dimensional parameter space. This process is often unstable. The Adaptive Moment Estimation (Adam)[24] optimizer is an adaptive optimization algorithm that adjusts the learning rate based on historical gradient information. It combines ideas from both RMSProp and Momentum optimization algorithms, allowing adaptive adjustment of the learning rate for each parameter and normalizing the updates for parameters. This normalization ensures that each parameter update has a similar magnitude, thereby improving the model’s convergence speed and generalization ability, enhancing training effectiveness. The Adam optimizer performs exceptionally well in dealing with non-convex optimization problems such as GANs. Therefore, this paper utilizes the Adam optimizer in the training process of ADD-GAN.
Adam optimizer is a gradient descent algorithm that combines the momentum algorithm with an adaptive learning rate algorithm. It achieves faster convergence and better generalization by calculating an adaptive learning rate for each parameter. At each step, the Adam optimizer calculates the moving average of the gradients and the moving average of the squared gradients, using them to update the model parameters. Specifically, it uses two exponentially weighted moving averages to adjust the learning rate for each parameter, achieving the effect of an adaptive learning rate. The update rule is as follows:
where is the moving average of the gradient at time t. is the moving average of the squared gradient at time t. is the gradient at time t. and are the exponential decay rates for the moment estimates. is the learning rate. is a small constant to prevent division by zero. This update rule adjusts the parameters based on both the first-order moment and the second-order moment of the gradients, providing adaptive learning rates for each parameter.
4. Experiments and Discussion
After constructing the ADD-GAN model, we conducted relevant experiments. The experiments were carried out using an IW4210-8G server with Ubuntu as the operating system. Other configurations of the server are shown in Table 1. The ADD-GAN model was trained using GPU.
4.1. Dataset and Evaluation Metrics
In this paper, 700 images of substation equipment surface defects were collected through on-site scenarios, including 353 images of oil leakage on the surface and 347 images of metal rust. Additionally, 1200 images of normal equipment were collected. Subsequently, the paper employed a local defect image augmentation method. Firstly, 400 local defect images based on prior knowledge were manually segmented, including 200 images each for surface oil leakage and metal rust. Then, experts drew 400 local defect images based on their experience using tools, with 200 images each for surface oil leakage and metal rust.
These defect images obtained through local defect image enhancement were manually overlaid onto equipment images to generate new equipment defect images, forming the training dataset for ADD-GAN. The composition of the final training dataset is presented in Table 2.
In this paper, the defect image dataset generated by the ADD-GAN model is further input into a defect detection model for evaluation. Therefore, several metrics, including Mean Average Precision (mAP), Precision, Recall, and F1 Score, are used to assess the performance of the defect detection model. The specific calculation formulas are as follows:
where is True Positives, and is False Positives.
where is False Negatives.
where n is the number of classes, and is the Average Precision for class i.
4.2. The Effectiveness of Generated Data
After completing the construction of the dataset, we input defect-free images separately with two types of defect images, forming two training datasets, into the ADD-GAN model for training. After obtaining the trained generator model, defect-free images are input into the generator, and the generated images are shown in Figure 5.
Figure 5(a) and (d) represent defect-free equipment images collected, Figure 5(b) shows the collected metal rust image of substation equipment, Figure 5(e) displays the oil leakage image obtained from collection, Figure 5(c) depicts the equipment image with rust defects generated by the ADD-GAN generator from Figure 5(a), and Figure 5(f) illustrates the equipment image with oil leakage defects generated by the ADD-GAN generator from Figure 5(d). Expert evaluation indicates that the generated equipment defect images exhibit a high degree of fidelity to real images and can be incorporated into training datasets for defect detection based on deep learning.
In this study, using the ADD-GAN model, 1000 defect images of metal rust and oil leakage were generated and fused with the collected original defect images to form a defect dataset. This dataset was utilized to train three typical object detection models of YOLOV7, Faster R-CNN, and SSD. Performance comparisons were made with models trained using the original dataset, and the results are presented in Table 3. It is evident that incorporating the training set with generated data significantly improves the performance of the object detection models compared to the original dataset, thereby demonstrating the effectiveness of the ADD-GAN method.
4.3. Ablation Experiments
In order to validate the proposed local region defect generation network and the joint giscriminator for overall Image and fefect Image for enhancing the network’s performance, ablation experiments were conducted in this study. The ablation experiment involved commenting out the code for specific modules, thereby disabling related functionalities. This process led to the training of the corresponding generator network, generating a defect dataset. Subsequently, the generated defect dataset was utilized to create a defect image training set for training the YOLOv7 model. Finally, the trained detection model was evaluated using the same test set, and the results are presented in Table 4.
Analysis of Table 4 reveals that both the local region defect generation network and the joint discriminator contribute to the performance improvement of the ADD-GAN model. Through an examination of images generated by the relevant models in the ablation experiments, it can be observed that the local region defect generation network focuses more on the quality of generating local defects. It can segment local areas without altering overall image features, generating relevant defects within those local regions. The joint discriminator pays more attention to the overall image quality and the consistency of merging overall images with local defect images. It can rectify situations where there are clear boundaries between defect and normal areas in generated images, making the generated images more consistent with actual image features.
4.4. GAN Model Comparison Experiments
In order to further validate the image quality generated by the ADD-GAN model, this section designs comparative experiments. The first set of comparative experiments uses traditional image augmentation methods, such as image rotation, scale transformation, brightness transformation, etc., to generate a total of 2000 images of rust and oil leakage defects. These augmented images are then merged with the collected original defect images to create a dataset of equipment defects. The second to sixth sets of comparative experiments use baseline and improved methods[16,18,20], respectively, to generate 2000 defect images each. These generated images are combined with the collected original defect images to constitute datasets of equipment defects.
The complexity comparison of the six adversarial deep learning-based methods is shown in Table 5. This study compares the complexity of various models based on three metrics: Params, GPU Memory Usage, and total floating-point operations (GFLOPS).
It can be observed that the Defect-GAN model has the largest values for all three metrics: Params, GPU Memory Usage, and GFLOPS, indicating the highest complexity among the examined models. The complexity of the proposed ADD-GAN model and the Cycle-GAN model is on the same order of magnitude. From the perspective of the training set images, since the collected substation equipment images have a complex background, the other models transform and generate the overall style of the images. This leads to a higher degree of distortion in comparison to real-world scene images, posing challenges for image labeling and the training of the YOLOv7 model.
We compares the testing results of the YOLOv7 object detection models trained on datasets obtained by the various methods in real-world scene test sets. The results are shown in Table 5. From the analysis of the comparative experimental results, it can be concluded that the images generated by the ADD-GAN model are more diverse compared to those generated by traditional methods. Furthermore, compared to other generation methods like Cycle-GAN, the ADD-GAN model can control the region of defect generation, avoiding issues of realism caused by global style changes. The improved performance of typical object detection models further validates that the proposed ADD-GAN model is capable of generating equipment defect images with rich features and high realism.
4.5. Optimizer Comparison Experiments
In this paper, the Adam optimizer is employed in the training process of ADD-GAN. To validate the performance of the Adam optimizer, four commonly used optimizers: AdaGrad, RMSProp, SGD, and AdaDelta [25] are used as a comparison in a designed experiment. Since the main purpose of optimizers is to improve the training process of neural networks, this paper compares the changes in the loss curves during the training process of the ADD-GAN model for various optimizers, as shown in Figure 6. It can be observed that the training process loss curve optimized by the Adam optimizer converges the fastest, with the smallest oscillation amplitude and the lowest final loss value. This is attributed to Adam combining momentum and adaptive learning rate algorithms in the gradient descent algorithm. It achieves faster convergence and better generalization by calculating the adaptive learning rate for each parameter.
The AdaGrad optimizer adjusts the learning rate by normalizing the gradient for each parameter. The normalization coefficient is calculated based on the sum of squares of all previous gradients. It can adaptively adjust the learning rate for each parameter but may hinder convergence due to the gradually accumulating gradient information leading to a too-small learning rate. SGD is one of the most basic and commonly used optimizers. It updates network parameters using the error of each sample, and each update only uses the gradient information of one sample, resulting in very fast computation. However, because it uses only one sample at a time, it may lead to oscillations or get stuck at local minima. The RMSProp optimizer calculates the second moment of the gradient information by weighted averaging to adaptively adjust the learning rate. It can adaptively adjust the learning rate, alleviating the issues in SGD. The AdaDelta optimizer is an improvement over Adagrad. It calculates the second moment of the gradient information using a moving average and retains information only for a recent period. This optimizer can adaptively adjust the learning rate for each parameter and is not affected by the problem of continuously accumulating gradient information. However, in the model training process in this paper, the effects of these four optimizers are still not as good as the Adam optimizer.
4.6. Analysis of Joint Discriminator for Overall Image and Defect Image
The discriminator is a key component in GAN networks used to evaluate whether the generated images are real. A typical discriminator is a single-channel multi-layer convolutional network that extracts image features through earlier convolutional layers, and the final convolutional layer or fully connected layer is used to determine the authenticity of the image. Conventional discriminators only provide an overall assessment of the authenticity of an image and cannot focus on local details. Therefore, in the context of defect generation in this paper, the authenticity of generated defects may have limited impact on the overall score assigned to the generated images.
To address the mentioned issue and enhance the weight assigned to the authenticity of generated defects in the discriminator, this paper introduces a joint discriminator for overall image and the defect image. This discriminator extends the global discriminator network by adding a defect region discriminator sub-network. This design aims to improve the quality of generated images with localized defects.
To validate the impact of the joint discriminator on image generation, this paper uses a discriminator composed of a global discriminator network as a comparison and trains the ADD-GAN model. In terms of complexity, the parameters of a single global discriminator network are 12.3M, and the total floating-point operations are 38 GFLOPs. The parameters of the joint discriminator are 21.7M, and the total floating-point operations are 71 GFLOPs. The joint discriminator has a higher complexity.
Regarding the image generation results, the generators trained with the two models are used to process normal images. The results are shown in Figure 7. Figure 7(a) depicts a normal device image, Figure 7(b) displays a defect image generated by the ADD-GAN network with the joint discriminator, and Figure 7(c) illustrates a defect image generated using only the global discriminator.
From the generated image results, it can be observed that the defect image generated by the discriminator without the addition of the local discriminator sub-network tends to preserve overall device characteristics rather than exhibiting rust defect features. This observation validates that a conventional discriminator tends to prioritize the overall authenticity of the generated image, potentially overlooking certain local defect image features.
In contrast, using the joint discriminator for overall image and the defect image not only preserves the overall authenticity of the image but also retains more local defect image features. This significantly enhances the defect image generation performance of the ADD-GAN model.
5. Conclusions
In this paper an ADD-GAN algorithm is proposed for generating rust and oil leakage defects on substation equipments. Building upon adversarial deep learning, the algorithm introduces a local region defect generation network and a joint discriminator for overall image and the defect image. This approach allows for segmentation of local regions and generation of relevant defects without altering the global image features. Simultaneously, it pays attention to both the overall image quality and the fusion consistency between global and local defect images. As a result, ADD-GAN can generate high-quality equipment defect images with rich features and high realism. Experimental results demonstrate that the image quality generated by ADD-GAN surpasses traditional image augmentation methods and mainstream adversarial deep learning algorithms. Moreover, the training set generated by ADD-GAN effectively improves the detection accuracy of mainstream object detection algorithms.
Future work may involve refining the local region defect generation network for improved defect generation accuracy, conducting application experiments on a wider range of substation defect data, further validating the practical performance of ADD-GAN, and making additional enhancements to the network.
Author Contributions
Conceptualization, N.Z., G.Y., and F.H.; methodology, N.Z. and H.Y.; validation, N.Z. and S.X.; investigation, N.Z.; resources, N.Z. and J.F.; data curation, F.H.; writing—original draft preparation, N.Z.; writing—review and editing, N.Z.; supervision, S.X. and J.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by State Grid Shanxi Electric Power Company Science and Technology Project "Research on Target Detection and Defect Recognition Capability Verification Technology of Substation Equipment Based on Image Generation Technology", grant number 52053023000X.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Swain, A.; Abdellatif, E.; Mousa, A.; Pong, P.W.T. Sensor Technologies for Transmission and Distribution Systems: A Review of the Latest Developments. Energies 2022, 15, 7339. [Google Scholar] [CrossRef]
- Laayati, O.; El Hadraoui, H.; El Magharaoui, A.; El-Bazi, N.; Bouzi, M.; Chebak, A.; Guerrero, J.M. An AI-Layered with Multi-Agent Systems Architecture for Prognostics Health Management of Smart Transformers: A Novel Approach for Smart Grid-Ready Energy Management Systems. Energies 2022, 15, 7217. [Google Scholar] [CrossRef]
- Lin, Y.; Li, Z.; Sun, Y.; Yang, Y.; Zheng, W. Voltage-Induced Heating Defect Detection for Electrical Equipment in Thermal Images. Energies 2023, 16, 8036. [Google Scholar] [CrossRef]
- Zeng, Y.; Lei, J.; Feng, T.; Qin, X.; Li, B.; Wang, Y.; Wang, D.; Song, J. Neural Radiance Fields-Based 3D Reconstruction of Power Transmission Lines Using Progressive Motion Sequence Images. Sensors 2023, 23, 9537. [Google Scholar] [CrossRef] [PubMed]
- Masita, K.; Hasan, A.; Shongwe, T. Defects Detection on 110 MW AC Wind Farm’s Turbine Generator Blades Using Drone-Based Laser and RGB Images with Res-CNN3 Detector. Appl. Sci. 2023, 13, 13046. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Zhou, B.; Luan, Z.; Zhang, J. YOLO-SS-Large: A Lightweight and High-Performance Model for Defect Detection in Substations. Sensors 2023, 23, 8080. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Shi, L.; Zhang, D.; Ke, T.; Li, J. Pointer Meter Recognition Method Based on Yolov7 and Hough Transform. Appl. Sci. 2023, 13, 8722. [Google Scholar] [CrossRef]
- Dong, H.; Yuan, M.; Wang, S.; Zhang, L.; Bao, W.; Liu, Y.; Hu, Q. PHAM-YOLO: A Parallel Hybrid Attention Mechanism Network for Defect Detection of Meter in Substation. Sensors 2023, 23, 6052. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhang, X.; Li, L.; Wang, L.; Zhou, Z.; Zhang, P. An Improved YOLOv7 Model Based on Visual Attention Fusion: Application to the Recognition of Bouncing Locks in Substation Power Cabinets. Appl. Sci. 2023, 13, 6817. [Google Scholar] [CrossRef]
- Zarco-Periñán, P.J.; Zarco-Soto, F.J.; Zarco-Soto, I.M.; Martínez-Ramos, J.L. Conducting Thermographic Inspections in Electrical Substations: A Survey. Appl. Sci. 2022, 12, 10381. [Google Scholar] [CrossRef]
- Liu, J.; Liu, C.; Wu, Y.; Xu, H.; Sun, Z. An Improved Method Based on Deep Learning for Insulator Fault Detection in Diverse Aerial Images. Energies 2021, 14, 4365. [Google Scholar] [CrossRef]
- Yang, J.; Wang, K.; Luan, F.; Yin, Y.; Zhang, H. PreCaCycleGAN: Perceptual Capsule Cyclic Generative Adversarial Network for Industrial Defective Sample Augmentation. Electronics 2023, 12, 3475. [Google Scholar] [CrossRef]
- Liu, R.; Liu, W.; Zheng, Z.; Wang, L.; Mao, L.; Qiu, Q. Anomaly-GAN: A data augmentation method for train surface anomaly detection. Expert Systems With Applications 2023, 228, 120284. [Google Scholar] [CrossRef]
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Di Maggio, L.G.; Brusa, E.; Delprete, C. Zero-Shot Generative AI for Rotating Machinery Fault Diagnosis: Synthesizing Highly Realistic Training Data via Cycle-Consistent Adversarial Networks. Appl. Sci. 2023, 13, 12458. [Google Scholar] [CrossRef]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Liu, Y.; Gao, W.; Zhao, T.; Wang, Z.; Wang, Z. A Rapid Bridge Crack Detection Method Based on Deep Learning. Appl. Sci. 2023, 13, 9878. [Google Scholar] [CrossRef]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv 2015, arXiv:1511.06434. [Google Scholar]
- Zhuang, C.; Li, J. Industrial Defect Detection of Plastic Labels Based on YOLOv5 and Generative Adversarial Networks. Computer Measurement and Control 2023, 31(7), 91–98. [Google Scholar]
- Zhang, G.; Cui, K.; Hung, T.Y.; Lu, S. Defect-GAN: High-Fidelity Defect Synthesis for Automated Defect Inspection. arXiv 2017, arXiv:1709.03831. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Lecture Notes in Computer Science; Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Nguyen, T.D.; Le, T.; Vu, H.; Phung, D. Dual Discriminator Generative Adversarial Nets. arXiv 2021, arXiv:2103.15158. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Tian, Y.; Zhang, Y.; Zhang, H. Recent Advances in Stochastic Gradient Descent in Deep Learning. Mathematics 2023, 11, 682. [Google Scholar] [CrossRef]
Figure 1.
Typical appearance defects of substation equipment: (a) Equipment surface leakage of oil. (b) Rust.
Figure 1.
Typical appearance defects of substation equipment: (a) Equipment surface leakage of oil. (b) Rust.
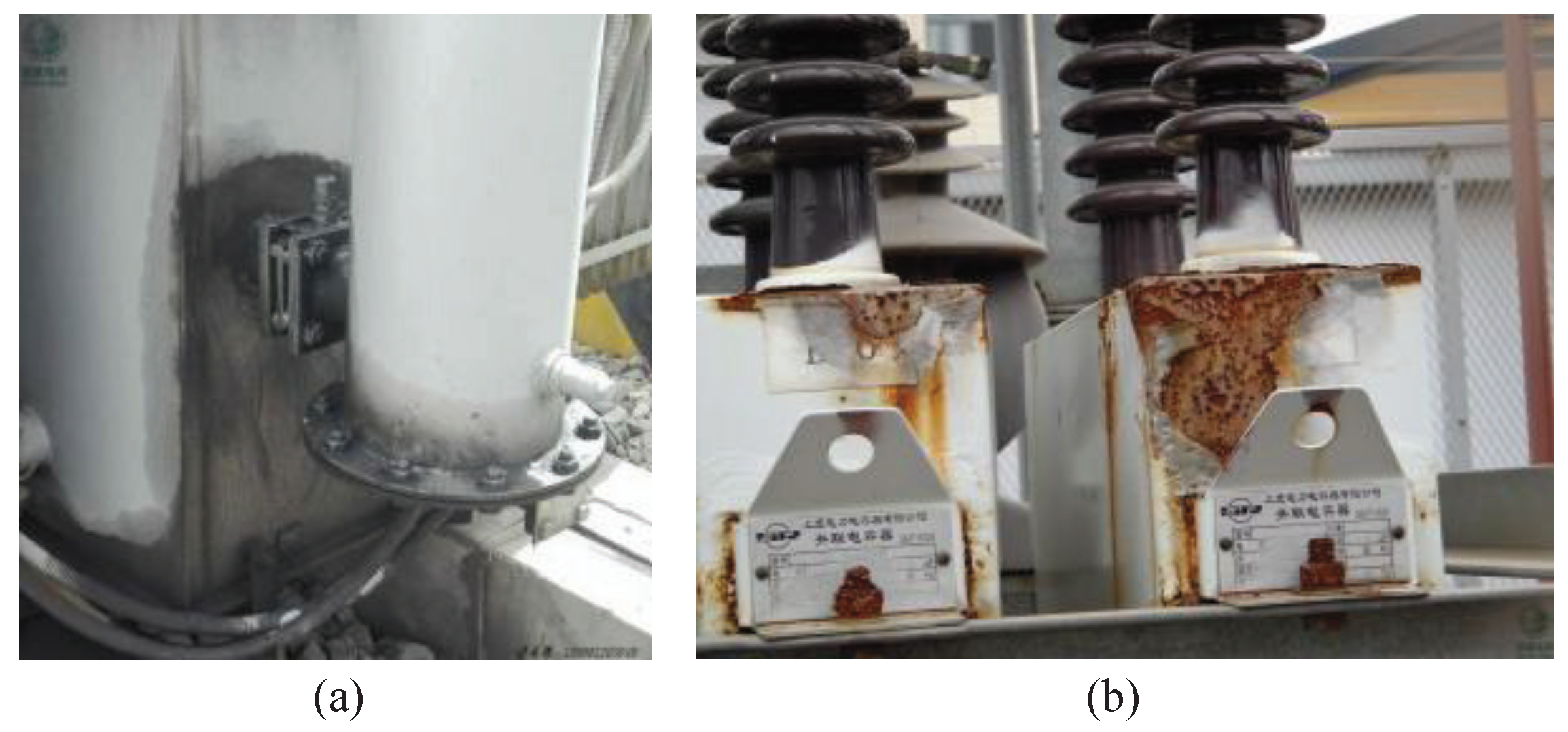
Figure 2.
Structure diagram of ADD-GAN model.
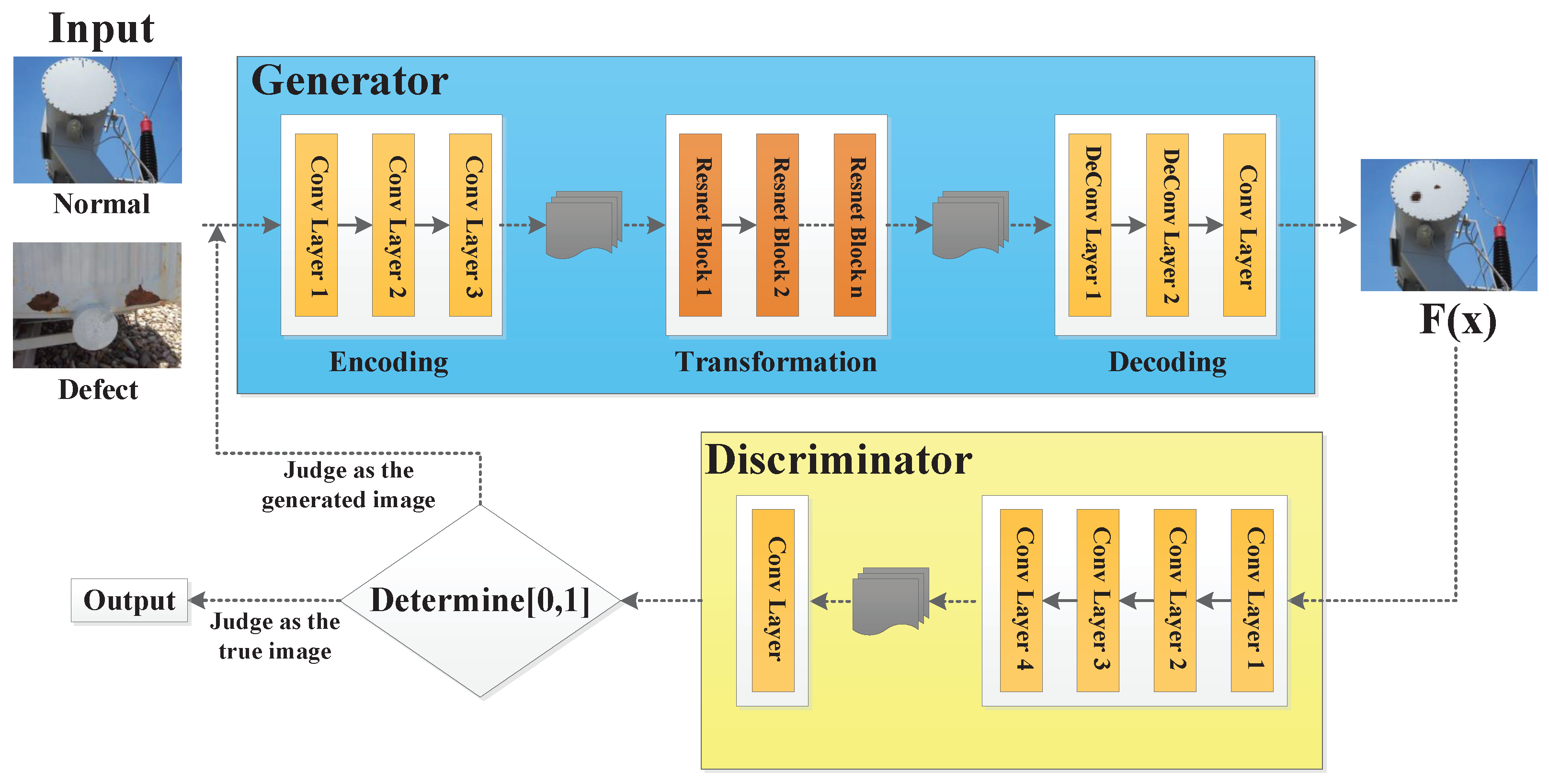
Figure 3.
Generator based on U-Net structure.
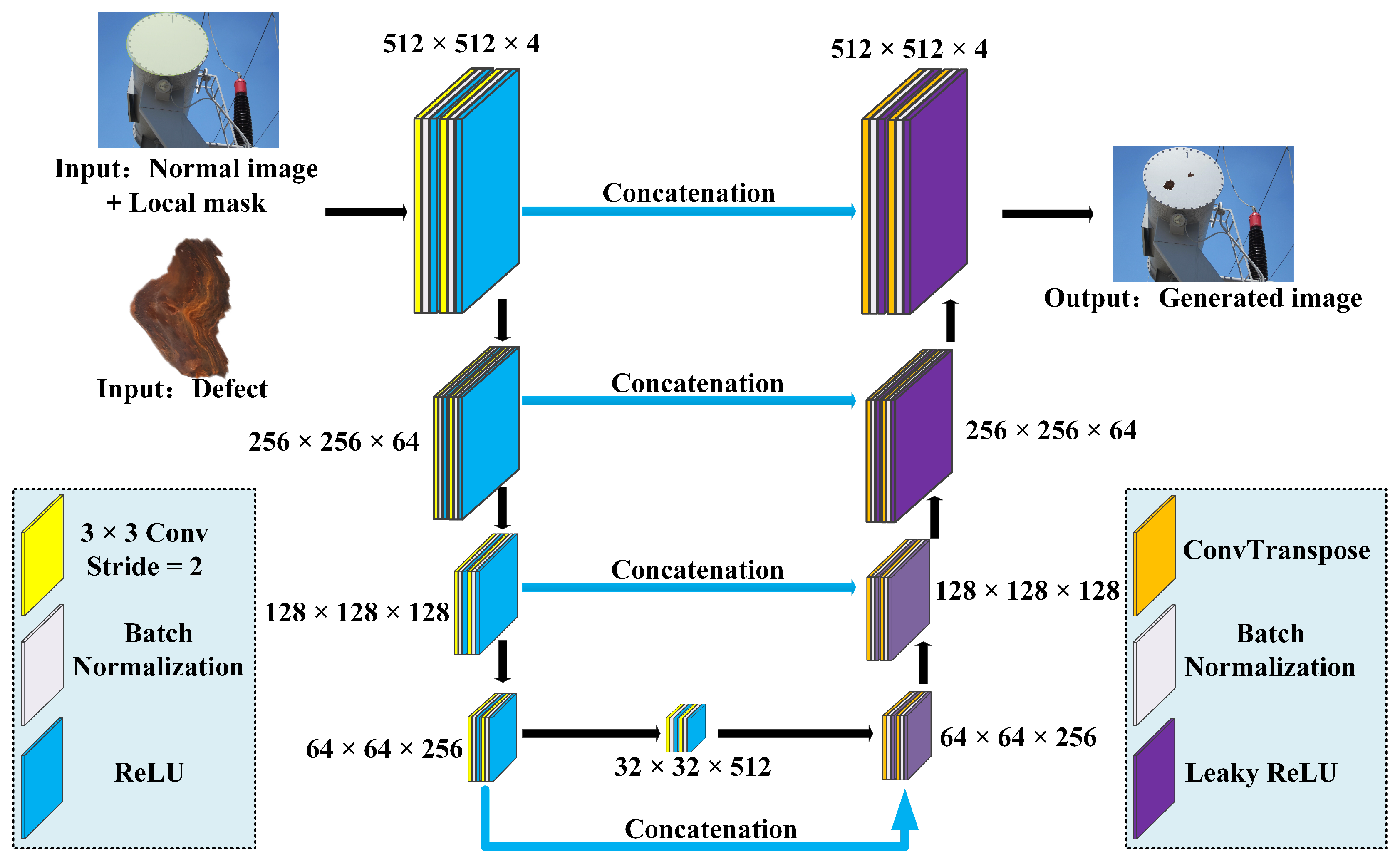
Figure 4.
Joint discriminator for overall image and defect image.
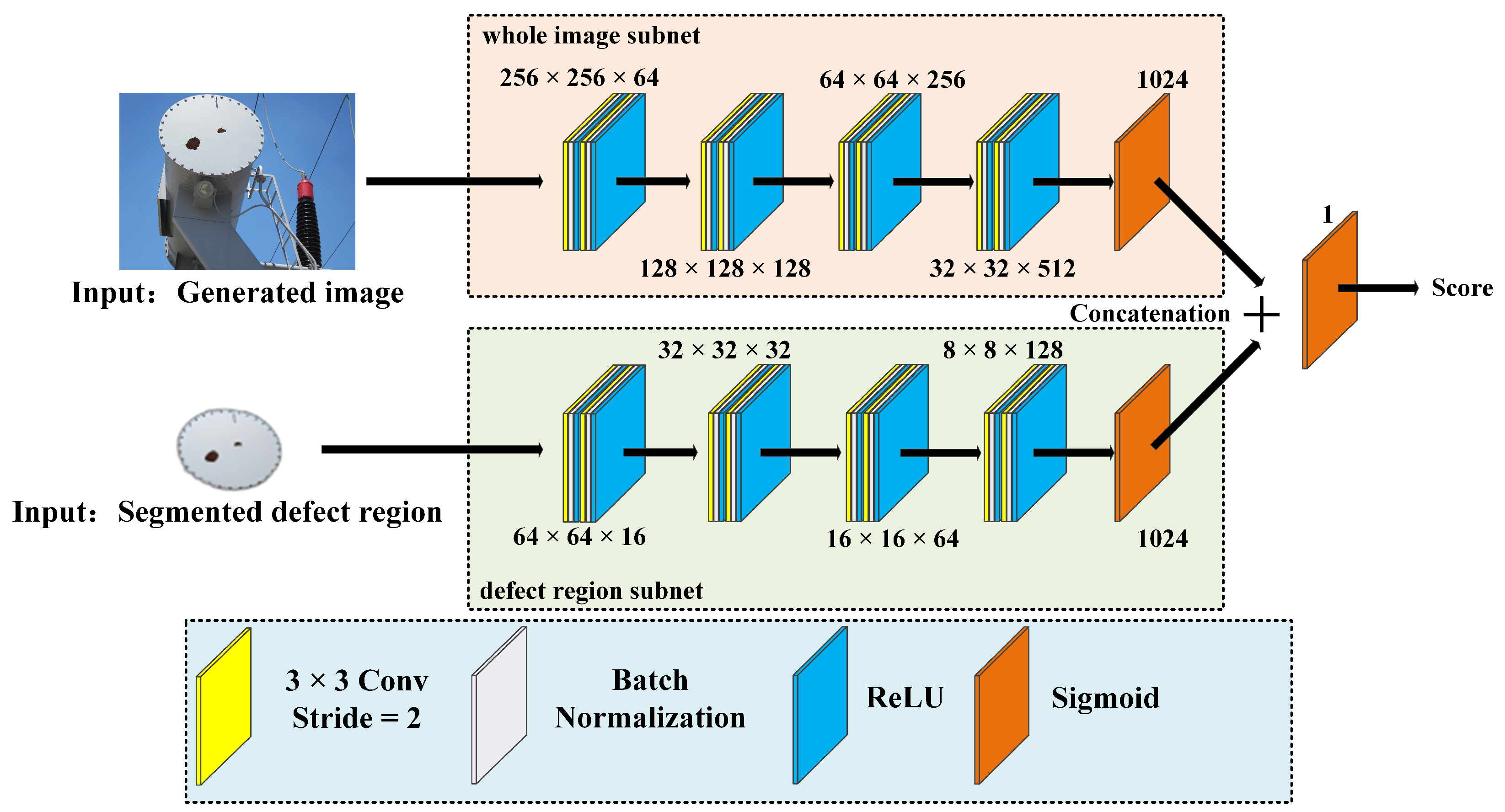
Figure 5.
Defect image generated by ADD-GAN model: (a) Defect-free image. (b) The collected image of metal rust. (c) The generated rust image. (d) Defect-free image. (e) The collected image of surface oil leakage. (f) The generated surface oil leakage image.
Figure 5.
Defect image generated by ADD-GAN model: (a) Defect-free image. (b) The collected image of metal rust. (c) The generated rust image. (d) Defect-free image. (e) The collected image of surface oil leakage. (f) The generated surface oil leakage image.
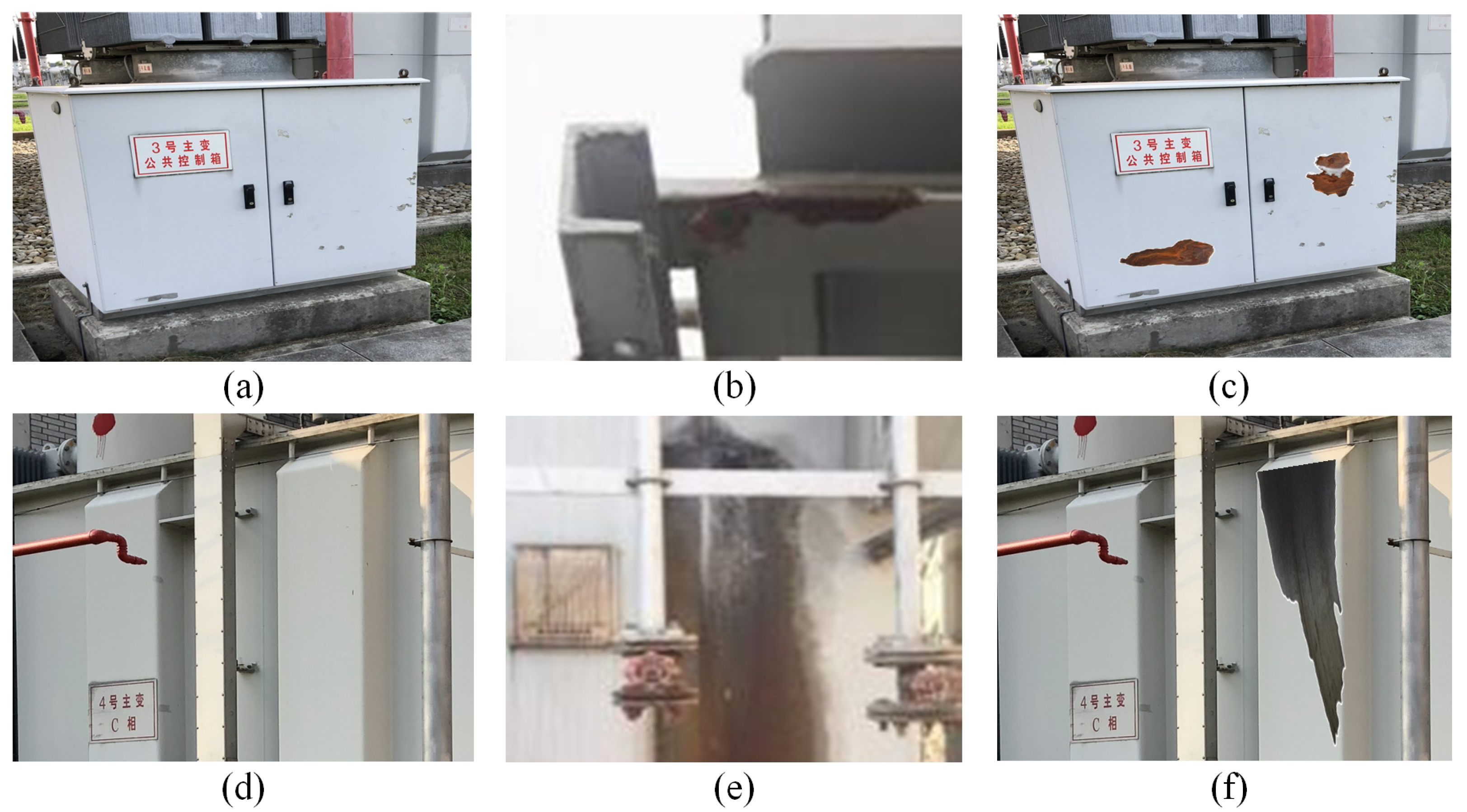
Figure 6.
Comparison of Loss curves for several optimizers.
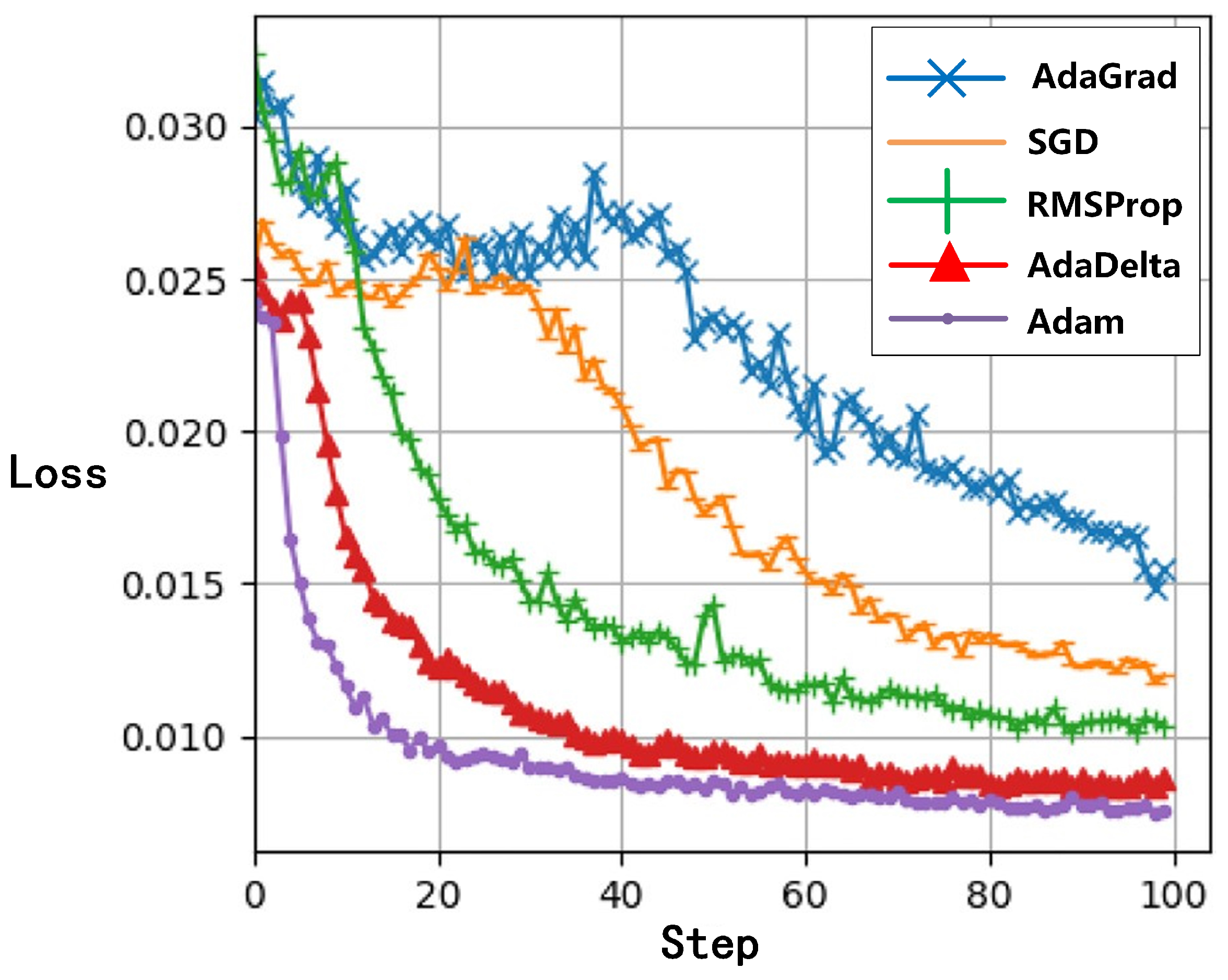
Figure 7.
Comparison of Loss curves for several optimizers.
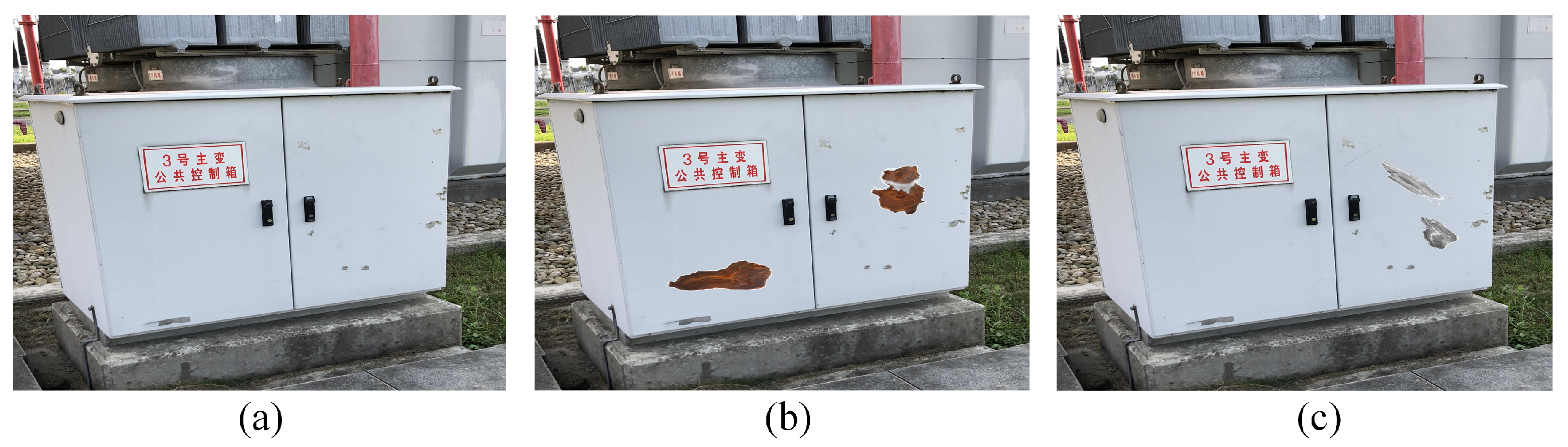

Table 1.
IW4210-8G server configuration.
| Configuration | Parameters |
|---|---|
| CPU | Intel(R) Xeon(R) Silver 4214 CPU @ 2.20 GHz |
| CPU MHz | 1000 |
| CPU Cache | 16896 KB |
| RAM | 257580 GB |
| GPU | NVIDIA GeForce RTX 2080 Ti |
| VRAM | 11 GB GDDR 6 |
| Graphics Memory | 14000 MHz |
| Core | 1350-1545 MHz |
Table 2.
Composition of the training set.
| Image categories | Image source | Number | Total |
|---|---|---|---|
| Defect-free | On-site acquisition | 1200 | 1200 |
| ]3*Surface oil leakage | On-site acquisition | 353 | |
| Manual segmentation | 200 | 753 | |
| Expert drawing | 200 | ||
| ]3*Metal rust | On-site acquisition | 347 | |
| Manual segmentation | 200 | 747 | |
| Expert drawing | 200 |
Table 3.
The performance comparison experiment.
| The types of training datasets | Detection model | mAP/% | F1 Score /% |
|---|---|---|---|
| Original images | SSD | 68.3 | 74.8 |
| Faster R-CNN | 70.2 | 77.4 | |
| YOLOv7 | 71.9 | 81.1 | |
| Original images + Generated images |
SSD | 74.1 | 81.0 |
| Faster R-CNN | 75.3 | 84.6 | |
| YOLOv7 | 81.5 | 88.7 |
Table 4.
Ablation experiment results.
| Detection model | mAP/% | F1 Score /% |
|---|---|---|
| Without the local region defect generation network | 78.3 | 84.7 |
| Without the joint discriminator | 79.5 | 85.8 |
| ADD-GAN | 81.5 | 88.7 |
Table 5.
Comparison experiment results.
| Image augmentation method | mAP/% | F1 Score /% | Params/MB | GPU Memory Usage/G | GFLOPs |
|---|---|---|---|---|---|
| Traditional methods | 75.8 | 85.3 | - | - | - |
| Cycle-GAN | 74.5 | 85.1 | 40.5 | 6.4 | 112 |
| U-ResNet + Cycle-GAN | 74.8 | 85.0 | 42.4 | 6.4 | 136 |
| DCGAN | 72.6 | 81.9 | 28.7 | 4.8 | 87 |
| USCONV+DCGAN | 73.2 | 83.6 | 28.9 | 4.8 | 94 |
| Defect-GAN | 77.4 | 87.3 | 77.4 | 11.3 | 357 |
| ADD-GAN | 81.5 | 88.7 | 45.3 | 7.1 | 151 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



