
Submitted:
29 May 2024
Posted:
30 May 2024
You are already at the latest version
Abstract
This article presents an innovative approach to the design of a safe adaptive backstepping control system. Tailored specifically for underactuated marine robots, the system utilizes simple sensors for enhanced practicality and efficiency. Given their operation in diverse oceanic environments fraught with various sources of uncertainties, ensuring the system's safe and robust behavior holds paramount importance in the control literature. To address this concern, this paper introduces a control strategy designed to ensure robustness at both the kinematic and dynamic levels. By emphasizing the compensation for the system uncertainties, the design integrates a straightforward fuzzy system structure. To further ensure the system's safety, a funnel surface is defined, followed by the design of a suitable nonlinear sliding surface as a function of the funnel and tracking error. Specifically leveraging the Lyapunov function, the study formally establishes the Semi-globally Practically Finite-time Stability of the closed-loop system, validated through simulations conducted on underactuated marine robots.
Keywords:
Marine Robots
; Funnel Control
; Backstepping Control
; Fuzzy Systems
; Finite-time Stability
1. Introduction
Autonomous and self-mission robots, particularly those designated for unmanned operations in the ocean such as marine vehicles, accompanied by suitable control schemes, have long stood as compelling research subjects, captivating the attention of numerous researchers. The resulting advancements have led to significant progress, providing valuable insights into the field. These insights could find numerous applications, such as marine research, subsea pipeline monitoring, lifesaving operations, oil and gas exploration, and many other missions [1,2,3]. However, despite the considerable strides made, the complexities surrounding underwater robotics persist. Challenges such as external disturbances, the unpredictable nature of fluid dynamics, navigation, energy management, environmental hazards and obstacles, underwater communication, autonomous decision-making and adaptation, as well as data processing, remain formidable obstacles. While considerable research has been dedicated to addressing the aforementioned issues, numerous challenges persist in the shadows. Therefore, additional research and discourse are imperative to develop robust and reliable algorithms capable of meeting the requisite standards and illuminating the intricacies of these challenges. In addition, autonomous marine vehicles encounter challenges categorized as underactuated, wherein the number of available actuators is fewer than the degrees of freedom. This circumstance adds further complexity to the design of control systems [3,4].
To meet these goals, schemes are needed to be implemented that are stable and safe. There are different ways to ensure the stability and safety of the system. One strong way to ensure formal stability is to use the Control Lyapunov functions [1,2,3]. These functions can provide a rigorous mathematical foundation for stability analysis. But this technique cannot alone ensure safety. To address safety, Control Barrier Functions (CBF) [5,6] and Funnel Control (FC) [7,8] have been proposed. One difficulty revolving around CBF is finding a suitable barrier function. Another issue regarding CBF is that it involves solving optimization problems as part of the control design process [5,6], which may be time-consuming and could be problematic in those applications that a fast and online reaction concerns.
Conversely, in FC [7,8], the defined boundary variable can easily mixed with nonlinear sliding surfaces and be used in Lyapunov functions in an outlier supervisory-like loop for monitoring some signals or confining some internal signals to achieve the requirement of safety and stability, without having to solve the optimization problems.
To address different uncertainties a strong approximation may be used. Among different approaches, Fuzzy Systems due to their special mathematical structure can be flexible enough to attract great attention to providing a strategy that could generally work for nonlinear systems and handling complex systems while being computationally efficient [2,8,9,10]. To overcome unmodelled dynamics, parametric uncertainties, and external disturbances, Sliding Mode Control (SMC) [1,11] proved to be effective enough to address these difficulties. However, from the practical point of view, the convergence time always matters, and thereby with ordinary SMC, designers may have less control over the rate of convergence. To achieve this objective, Terminal Sliding Mode Control (TSMC) has been developed, capitalizing on the robustness inherent in the original SMC-based methodologies, to ensure convergence within a finite time frame [3]. In this reference, a TSMC approach was devised for the trajectory tracking of underactuated underwater robots. Additionally, in [12], an innovative study introduced an adaptive finite-time impedance backstepping control scheme tailored for robot manipulators operating within unfamiliar environments. In practical terms, the inclusion of certain types of functions within the nonlinear sliding surface, such as the utilization of a sign function [1], can potentially lead to chattering in certain scenarios. To mitigate these challenges, the TSMC approach, as outlined in [3], has replaced the sign function with a saturation function, effectively resolving the potential issue of chattering. Another challenge associated with SMC pertains to the development of methodologies that do not impose restrictions on the rotational motion of the robot. For instance, this limitation is evident in the research cited in [13,14], as reported in [3].
Unlike many proposed control approaches like what was conducted on motion tracking [13,14] which have the limitation of being only valid for tracking special cases of reference trajectories, our proposed method can be used for a wide range of trajectories regardless of their shape. Moreover, compared to the safety methods developed in [5,6], in our case, we do not have to solve possible time-consuming optimizations since we introduce a novel boundary layer that utilizes a new soft funnel shape, contrasting with the approach in [7]. Additionally, unlike the methods discussed in [1,12], our proposed boundary layer does not incorporate a sign function within its structure, ensuring the robot’s signals remain within the safe set. In terms of feasibility and robustness, our proposed scheme surpasses much of the above research by considering a broader range of uncertainties through the utilization of a more straightforward fuzzy estimator compared to [2,8]. Moreover, the developed method does not use the direct feedback of the lateral velocity, eliminating this way the need for a costly lateral velocity sensor and thereby enhancing its economic viability. The primary contributions of this article, as an extended version of [15], are outlined as follows:
- Trajectory tracking of an underactuated marine vehicle is addressed amidst significant sources of uncertainties, encompassing time-varying external disturbances at both the Kinematics and Dynamics levels, unmodeled dynamics, time-varying water current speeds, lateral velocities, and estimator errors;
- Robust funnel control is proposed for trajectory tracking with formal stability guarantees, ensuring finite-time stability and safety;
- Control design eliminates the necessity for exact knowledge of the robot dynamics, enhancing design simplicity and feasibility through the utilization of straightforward feedback sensors. For instance, there is no requirement for lateral sensors or other complex sensors such as acceleration feedback;
- Leveraging developed mathematics and formulations, along with a TSMC and novel funnel boundary shape, designers can tailor to diverse requirements and uphold various safety measures across different initial conditions;
- Implementation of a fuzzy estimator facilitates the estimation of unmodeled dynamics in the robot, employing a simple design and straightforward inputs;
- Compensation for the imprecision of fuzzy systems is achieved through the integration of a robust controller.
The remainder of this article is organized as follows: Section 2 delves into the Kinematics and Dynamics of marine vehicles within a two-dimensional framework. In Section 3, the architecture of the proposed control technique is detailed, followed by a discussion on stability analysis in Section 4. Section 5 presents simulation results conducted on challenging scenarios, while Section 6 concludes with final remarks.
2. Robot Kinematics and Dynamics
By employing a two-dimensional representation of the robot’s movement path on a plane, the Kinematics of the marine vehicle can be expressed through the following equation (see e.g., [16,17]):
where x, y, and denote the displacement along the x and y axes and the heading angle of the vehicle, respectively. Other signals including , , and r represent the surge, sway, and rotational speeds of the vehicle, while and denote the water current along surge and sway, respectively. Let us consider the vector representing the external disturbances exerted in displacements along the x and y axes as . The dynamics equation of the robot, which encapsulates motion along the surge, sway, and rotational axes, can be formulated as follows [16,17]:
Here, , , and are terms of the inertia matrix including hydrodynamic added mass information, while , , and characterize the hydrodynamic damping effects. Other signals, such as , , and , represent external disturbances along the surge, lateral, and rotational axes, respectively. The signals and denote the control signals applied in the surge and rotational directions, respectively.
3. Proposed Controller
Before designing the Backstepping controller, it is imperative to establish a tracking error, defined as the disparity between the actual rotated path and its desired trajectory. Let us define the tracking error as
where the vector is composed of two elements, and each for to 2 is correlated to every task space variable, represented as: . In consideration of the controller’s safety measures, the following funnel variable is employed:
In this context, represents a function with a funnel shape that delineates a safe permitted area for the tracing error over time and in this paper is proposed as follows:
Here, and represent the initial and steady values of , respectively, while is a positive constant chosen by the designer to control the funnel boundary. The following nonlinear sliding surface is proposed as follows:
where and . In the proposed control method, the nonlinear sliding surface and its time derivative are considered as the system variables. These variables are later demonstrated to serve as inputs for the fuzzy estimator. To calculate the time derivatives of and , it would be straightforward if we first compute the time derivative of . To this end, the time derivative of is given as the following equation:
Let us assign and as and , then one can rewrite equation (12) as follows:
Taking the time derivative of this equation yields the following equality:
The state-space representation can be expressed as follows:
By defining as and utilizing equation (5), equation (Section 3) can be rewritten as follows:
in which is given by
The state representation, as formulated in (Section 3) with the uncertainty function (17), will be employed in designing the proposed control technique. This paper introduces the following control law:
Here, and are the control design parameters, which must be positive, l is a natural number, and represents the robust term formulated as follows:
Here, represents the upper estimated bound of the modeling uncertainty using the fuzzy system. To prevent the denominator of equation (19) from being zero, as evident in the formula, a small positive value is added to the denominator, and is another positive constant selected by designers. The adaptation procedure for the signals and in this paper is outlined by the following two equations:
where and are the learning rates, and and are constant parameters chosen by designers. In equation (18), represents the output of the fuzzy system corresponding to the i-th estimator, which is intended to estimate the uncertainty. The fuzzy estimator structure in this article employs a product inference engine, singleton fuzzifier, center-average defuzzifier, and Gaussian membership functions [18]. Its architecture is as follows:
In this context, denotes the number of fuzzy rules corresponding to each task-space variable, respectively, while represents the membership function defined over the input range. In the realm of fuzzy systems, the degree of membership signifies the level to which an element is associated with a specific fuzzy set.
Considering the problem of two-dimensional motion control as outlined in the dynamic equation in this paper, it is necessary to employ two fuzzy estimators: one dedicated to compensating for uncertainties along the x-axis and the other along the y-axis. Each estimator is designed to accommodate two inputs. Based on these two fuzzy inputs, which are and , one can rewrite (22) as follows:
Simplicity dictates that three membership functions, namely N, Z, and P as depicted in Figure 1, are assigned with the following mathematical equations for each fuzzy estimator’s input:
To achieve a comprehensive understanding of the developed controller, the overall block diagram of the proposed method and the coordinate frames of the robot’s motion are illustrated in Figure 2, parts (a) and (b) respectively.
For designing the fuzzy system let us consider the following definitions for the membership functions and the set of rules:
Definition 1.
In the context of fuzzy systems, a membership function is considered normal if its maximum height value is one, as defined by [18], that is:
Here, represents the i-th input for to , where is the total number of inputs. denotes the rule index for the membership function associated with , where to , and is the total number of rules for the fuzzy set . stands for the membership function of input element in the fuzzy set .
Definition 2.
A collection of fuzzy IF-THEN rules is considered complete provided that for every , there is at least one rule in the fuzzy rule base, for instance, , denoted as in the format of (24)-(26), where:
In other words, a membership function is considered complete if it covers the entire input range with appropriate overlap, ensuring that every point in the domain has at least a membership in one fuzzy set [18].
4. Analyzing Control System Stability
4.1. Overall Stability of the System
This section aims to analyze the stability of the overall system, which consists of two subsystems based on the backstepping principles. To achieve this goal, the following information needs to be considered:
Assumption 1.
The external disturbances influencing the Kinematics, and Dynamics of the robots are considered to be bounded, that is,
where and are positive constants.
Assumption 2.
The desired trajectory, , is sufficiently smooth, and its time derivative is assumed to be readily available up to the required order [10].
Assumption 3.
It is assumed that the water current velocity signals in the surge and sway directions are bounded.
Definition 3
([7]). To establish a particular stability criterion, we initially examine a nonlinear system subject to the following conditions
in which signifies the state vector and denotes the control input. The function N, which maps the domain from to , is assumed to be continuous and defined within an open region around the origin. If there exists a neighborhood encompassing the equilibrium point, and for each initial condition , there exists a positive constant ε along with a time-varying yet bounded parameter such that for all , then the system described by (33) is termed to have Semi-Globally Practically Finite-Time Stability (SGPFS).
Proposition 1.
Assuming that the vector operates within the input universe denoted as , a compact set within , let’s consider any real continuous function defined over this set and an arbitrary . Under these conditions, it can be asserted that there exists a fuzzy system, denoted as , structured with a product inference engine, singleton fuzzifier, center-average defuzzifier, and Gaussian membership functions. This system is designed such that the following relation holds:
This inequality suggests that the fuzzy system mentioned serves as a universal approximation [18]. In this context, represents the output of the fuzzy system, and denotes both the precision of the fuzzy system and the upper bound on unmodeled dynamics, as established by the universal approximation.
Proposition 2.
Assuming the presence of a positively definite function established within a vicinity surrounding zero for the nonlinear system (5), if and its time-derivative adheres to the subsequent inequality:
where , ι, and ϱ are fixed positive values, then the system exhibits SGPFS behavior.
Theorem 1.
Under Assumptions 1–3 and Proposition 1, the funnel backstepping control strategy, as presented in equation (18) with its robustifying term specified in (19) and estimator given in (23), coupled with the adaptation laws (20) and (21), guarantees the SGPFS of the system (5), while also ensuring that the tracking error (8) remains within the safe set.
Proof of Theorem 1.
To derive a control law that can guarantee the stability of the first subsystem, the following Lyapunov function will be introduced as a potential candidate:
One way to stabilize the first subsystem is to propose the virtual input as . By implementing this virtual input, the time derivative of the Lyapunov function given in (36) will be as the following form:
Equation (37) implies that the first subsystem is semi-definite stable. In terms of the main subsystem, the strategy will be to first define a new variable as
and then, based on the newly formed state space representation, formulate the Lyapunov candidate for the second subsystem as:
in which and are defined as and , respectively. Here, denotes the actual parameter representing the upper bound of the unmodeled dynamics, while represents the estimated value of this upper bound. Similarly, and refer to the actual parameters and their estimations related to the modeled uncertain dynamics.
To analyze the rate of energy changes within the Lyapunov function, one can take the time derivative of Equation (39) to obtain:
Subsequently, the dynamics of the robot, as described in (Section 3), must be integrated into (40) to produce:
Here, represents the lumped uncertainty and can be modeled by the following equation:
In equation (42), , , and represent the uncertainty parameters, regressors, and unmodeled dynamics, respectively. To address this uncertainty, the approach involves utilizing a fuzzy system for estimation. In essence, the fuzzy system will be designed with an appropriate structure and inputs so that its output provides a suitable estimate of the uncertainty.
By applying the control law defined in equation (18) along with the robustifying term as formulated in equation (19), and through subsequent manipulation, the following components will be incorporated:
Lemma 1.
For any non-negative variables a, b, and δ, the following inequality holds:
By using the inequality given in Lemma 1, the following can be concluded:
Proposition 1 establishes that the unmodeled dynamics can be bounded provided that the fuzzy system is appropriately structured. This conclusion, along with considering as an upper bound for , facilitates the derivation of the following inequality for all and :
By considering the worst-case scenario modeled with the upper bound defined in equations (45) and (46), the exchange energy rate in the Lyapunov function, as defined in equation (43), can be rewritten as follows:
By substituting (20) and (21) into (47) and performing some manipulation and simplification, the following can be achieved:
Lemma 2
([19]). For positive constants a, b, and c, and for any real variables and the subsequent inequality holds:
Lemma 3
In accordance with the worst-case scenario for the exchange energy change of the Lyapunov function, lets consider the following equality:
On the other hand, the following inequality holds:
By using (52), the left hand side of equation (51) can be written as:
Similarly, the following inequality can be concluded:
Upon substituting (53) and (54) into (48), the following is obtained:
By using Lemma 2, and defining , , , , , , one can conclude that:
Then the following can be concluded:
Similarly, one can reach to the following inequality:
Substituting (57) and (58) into (55) yields:
Using Lemma 3 in (59) implies that
To simplify the equation further, let’s designate as the minimum among the four coefficients below, following the strategy of designing for the worst-case scenario.
Regarding the remaining components within (61), let’s consider them collectively as follows:
By employing equations (61) and (62), the final expression for the Lyapunov exchange energy can be represented by the following mathematical equation:
By comparing this to Proposition 2, the SGPFS of the main subsystem will be achieved. □
4.2. Internal Behavior of the System
In the preceding subsection, the establishment of SGPFS was discussed. This establishment, as delineated by (9), ensures that if the initial condition falls within the task space funnel, the system’s energy undergoes decay and can be confined within a predefined funnel-shaped energy boundary. Consequently, equation (63) asserts the boundedness of the components of the Lyapunov function, namely , , , and . This boundedness extends to the sliding surface and its time derivative . The consequent boundedness of and implies the boundedness of and . By selecting positive values for , , , and , it is inferred that and are also bounded in accordance with (20) and (21). Additionally, the fuzzy regressor , which is a function of and , is bounded when considering the normalized membership function condition alongside the completeness of the fuzzy system. Consequently, all signals on the right-hand side of (23) exhibit bounded behavior, thereby implying the boundedness of .
By designing the robot’s desired trajectory to circumvent singularity points (i.e., ensuring the existence of the inverse of the Jacobian matrix), it can be demonstrated that the robot variable and its time derivative also remain bounded.
Likewise, the boundedness of all components on the right-hand side of equations (18) and (19) indicates the boundedness of the robust controller and the main controller . Utilizing Proposition 1 and substituting the bounded (18) and (19) into (5), it can be concluded that the acceleration signal is also bounded.
The boundedness of implies the boundedness of , considering the upper bound of the rotation matrix. This boundedness of extends to the boundedness of x, y, and of the robot. Similarly, it can be inferred that is also bounded. Referring to (1), the boundedness of , along with the Assumptions 1 and 3, and considering the upper-boundedness of external disturbances in Kinematics, leads to the conclusion that the internal velocity signals and r are also bounded. Referring to (Section 2), the boundedness of and can be deduced under the assumption of upper-bounded external disturbances in Dynamics and lateral velocity, as well as other upper bounded signals in (Section 2).
5. Simulation Results and Discussions
For the effectiveness assessment of the proposed method and comparison, MATLAB was employed.
5.1. Simulation A: Proposed Method
Here the developed scheme is simulated on the robot in the presence of important uncertainties. The dynamics of an under-actuated marine vehicle navigating in two dimensions were analyzed using the following parametric table [21]:

Table 1.
Dynamic parameters of the mobile robot.
| 47.52 | 104.05 | 13.38 | 13.5 | 44.96 | 27.2 |
In the MATLAB setup, the sampling time was configured as seconds, and the program was executed for seconds. The intended trajectory for the robot within the two-dimensional plane is expressed through the following set of equations:
where , and are defined as , , . The trajectory consists of three distinct sub-trajectories: the first being a linear segment for , followed by a rotational trajectory with a time-varying radius for , and concluding with another linear segment for . The parameters of the proposed control are illustrated in Table 2.
The transition between linear and rotational trajectories is deliberately designed to occur abruptly, resulting in a discontinuity where the first-time derivative does not exist. This intentional design choice serves to simulate scenarios where significant challenges arise, allowing for the effective evaluation of the system’s performance and stability. An instance of such a scenario could occur in the presence of underwater turbulence or during obstacle avoidance maneuvers.
When confronted with the erratic and irregular movement of water or the need to avoid collisions with the environment, the system must respond promptly based on data collected by safety sensors. One approach to mitigating the adverse effects of sudden changes in trajectory is to rapidly adjust the desired trajectory. However, this adjustment may sacrifice smoothness, potentially necessitating points of non-differentiability at transition points, denoted as and . The primary controller must be adequately equipped to address this challenge and undergo thorough evaluation and testing to ensure its effectiveness.
The robot experiences external disturbances affecting its Kinematics, with the components represented by . In terms of dynamic uncertainties, signals for , , and are expressed as and . The desired and actual trajectories of the robot, along with a schematic representation of the robot indicating its orientation, are depicted in Figure 3. According to this plot, the robot initially starts with a heading angle of , and its starting position is . The heading angle is separately depicted in Figure 4. The change in the heading angle and its oscillatory behavior enable the robot to generate the necessary force for the engine to execute the maneuvers required to track the trajectory, even as unwanted disturbances affect the robot, attempting to divert it from the desired path. The robot successfully tracks the desired trajectory while reducing its error within a finite time frame. The robot’s task space comprises four regions: , , , and , representing scenarios with varying water current speeds that may endanger system stability. The water current speed in each zone is determined by the following equations:
- ;
- ;
- ;
- .
For better clarity, Figure 3 and Figure 4 are color-coded based on entry into each zone, making it easier to observe the behavior of the system. The tracking errors of the robot along the x and y directions, as well as the safe area, are illustrated in Figure 5.
Thanks to the robust funnel control strategy proposed in this paper, the tracking error consistently stays within the boundaries of the funnel shape. However, the robot must commence its movement within the funnel for this strategy to take effect.
Despite encountering abrupt changes in the desired path at times and seconds, as well as sudden alterations in the amplitude and direction of the water current speeds at the boundaries, which attempted to push the error beyond the funnel boundaries, the controller successfully coerced the system back inside the safe set, as demonstrated in the Figure 5. Ensuring that the tracking error remains within the funnel boundary is crucial for guaranteeing the safety of the controller. By observing the performance of the robot as depicted in Figure 3, Figure 4 and Figure 5, one can conclude that the controller effectively compensates for external disturbances affecting the robot, as well as various changes in water current speed that pose a threat to the robot’s stability.
The control signal is plotted in Figure 6 and has the potential to be directly applied to the robot’s actuators. Plotting signals and r can significantly aid in understanding and ensuring the internal stability of the closed-loop system. These two signals are displayed in Figure 7. They demonstrate the stable behavior of the internal dynamics of the robot, even in the presence of significant sources of uncertainty.
The adaptation of fuzzy parameter estimation is illustrated in Figure 8.
Considering three membership functions for each of the two fuzzy inputs, and , nine fuzzy rules, which correspond to the number of parameters, form the rule base of the estimator along each task space direction, x and y. Two fuzzy estimators are required: one for compensating uncertainties along the x direction and the other along the y direction. The uncertainty upper bound estimation, represented as , is depicted in Figure 9.
The rapid dynamical behavior of certain fuzzy parameters and the robust term enables the controller to react quickly and effectively to external disturbances at both the Kinematics and Dynamics levels.
5.2. Simulation B: Gradient-Descent Based Control
For comparison purposes, the methodology described in [15] has been implemented under identical simulation conditions. This facilitates a clearer demonstration of the improvement and novelty of the proposed method as an extended version of the previous work. For further information regarding the controller and its structure, please refer to [15].
The tracking errors, control efforts exerted on robot actuators, and velocity control laws provided by the outer loop are illustrated in Figure 10, Figure 11, and Figure 12, respectively.
To facilitate comparison, Figure 13 presents the tracking error norms for both the proposed method and the gradient descent-based controller.
Upon analyzing this signal, it becomes evident that the proposed method significantly outperforms the gradient descent fuzzy estimator method. According to Figure 10, it is evident that the tracking error may not necessarily have remained within the safe area. Consequently, it cannot be deemed as a safe controller.
6. Conclusions
In this paper, we introduced a novel funnel backstepping controller designed to ensure the safe navigation of an underactuated marine robot, with formal stability guarantees incorporated into its design. We have tackled major challenges from ocean conditions, directly affecting the robot’s stability. The controller’s structure, coupled with its fuzzy estimator, is simplistic and integrates straightforward sensory data feedback mechanisms. These attributes render it highly suitable for practical implementation in real-world settings. Our simulation results and comparative analyses demonstrate the effectiveness, robustness, and safety enhancements achieved by the robot, as evidenced by the visualization of internal signal plots. These simulations encompassed a spectrum of challenging scenarios, including time-varying external disturbances, unmodeled dynamics, fluctuating water currents, and lateral velocities. The proposed safe backstepping control mechanism demonstrated robustness in navigating intricate marine conditions, supported by comprehensive comparative analysis.
Acknowledgments
The authors acknowledge the financial support of the Foundation for Science and Technology (FCT/MCTES) in the framework of the Associated Laboratory - Advanced Production and Intelligent Systems (AL ARISE, ref. LA/P/0112/2020), the R&D Unit SYSTEC (Base UIDB/00147/2020 and Programmatic UIDP/00147/2020 funds), and project RELIABLE - Advances in control design methodologies for safety critical systems applied to robotics (ref. PTDC/EEI-AUT/3522/2020) both funded by national funds through the FCT/MCTES (PIDDAC). The first author was supported by a Ph.D. Scholarship, grant 2022.11470.BD from FCT, Portugal.
Abbreviations
The following abbreviations are used in this manuscript:
| SMC | Sliding Mode Control |
| TSMC | Terminal Sliding Mode Control |
| FC | Funnel Control |
| CBF | Control Barrier Functions |
| SGPFS | Semi-Globally Practically Finite-Time Stability |
References
- Li, B.; Gao, X.; Huang, H.; Yang, H. Improved adaptive twisting sliding mode control for trajectory tracking of an AUV subject to uncertainties. J. Ocean Eng. 2024, 297, 116204. [Google Scholar] [CrossRef]
- Li, X.; Qin, H.; Li, L.; Xue, Y. Adaptive fixed-time fuzzy formation control for multiple AUV systems considering time-varying tracking error constraints and asymmetric actuator saturation. J. Ocean Eng. 2024, 297, 116936. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. J. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef]
- Li, B.; Wen, S.; Yan, Z.; Wen, G.; Huang, T. A survey on the control lyapunov function and control barrier function for nonlinear-affine control systems. IEEE/CAA J. Automat. Sinica 2023, 10, 584–602. [Google Scholar] [CrossRef]
- Yan, S.; Shi, L.; Zhang, H.; Yao, S.; Zhou, Y. Safety-Critical Model-Free Adaptive Iterative Learning Control for Multi-agent Consensus using Control Barrier Functions. IEEE Trans. Circuits Syst. II 2024, 71, 221–225. [Google Scholar] [CrossRef]
- Bao, J.; Wang, H.; Xiaoping Liu, P. Adaptive finite-time tracking control for robotic manipulators with funnel boundary. Int. J. Adapt. Control Signal Process. 2020, 34, 575–589. [Google Scholar] [CrossRef]
- Li, Y.; Dong, S.; Li, K. Fuzzy adaptive finite-time event-triggered control of time-varying formation for nonholonomic multirobot systems. IEEE Trans. Intell. Vehicles 2024, 9, 725–737. [Google Scholar] [CrossRef]
- Nazmara, G. R.; Fateh, M. M.; Ahmadi, S. M. A model-reference impedance control of robot manipulators using an adaptive fuzzy uncertainty estimator. Int. J. Comput. Intell. Syst. 2018, 11, 979–990. [Google Scholar] [CrossRef]
- Nazmara, G. R.; Fateh, M. M.; Ahmadi, S. M. Exponentially convergence for the regressor-free adaptive fuzzy impedance control of robots by gradient descent algorithm. Int. J. Syst. Sci. 2020, 51, 1883–1904. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, B.; Liao, Y.; Wang, B. Finite-Time Trajectory Tracking Control for Uncertain Underactuated Marine Surface Vessels. IEEE Access 2019, 7, 102321–102330. [Google Scholar] [CrossRef]
- Ahmadi, S.M.; Taghadosi, M.B.; Nazmara, G. Adaptive finite-time impedance backstepping control for uncertain robotic systems interacting with unknown environments. Int. J. Control 2023, 96, 2671–2682. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. J. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Lefeber, E.; Pettersen, K. Y.; Nijmeijer, H. Tracking control of an underactuated ship. IEEE Trans. Control Syst. Technol. 2003, 11, 52–61. [Google Scholar] [CrossRef]
- Nazmara, G.; Aguiar, A.P. Robust Path-Following Control of Underactuated Marine Vehicles Using Gradient-Descent Fuzzy Estimation. In Proceedings of CONTROLO 2022, Portugal, (2022).
- Vanni, F.; Aguiar, A.P.; Pascoal, A.M. Cooperative path-following of underactuated autonomous marine vehicles with logic-based communication. IFAC Proceedings Volumes,(2008).
- Aguiar, A.P.; Pascoal, A.M. Dynamic positioning and way-point tracking of underactuated AUVs in the presence of ocean currents. Int. J. Control 2007, 10, 1092–1108. [Google Scholar] [CrossRef]
- Wang, L.X. <italic>A Course in Fuzzy Systems</italic>, Prentice-Hall press: USA, 1999.
- Qian, C.; Lin, W. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. J. SCL 2001, 42, 185–200. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. J. Automatica. 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Wang, N.; Pan, X. Path following of autonomous underactuated ships: A translation–rotation cascade control approach. IEEE/ASME Trans. on Mechatronics 2019, 24, 2583–2593. [Google Scholar] [CrossRef]
Figure 1.
Membership functions of fuzzy systems.
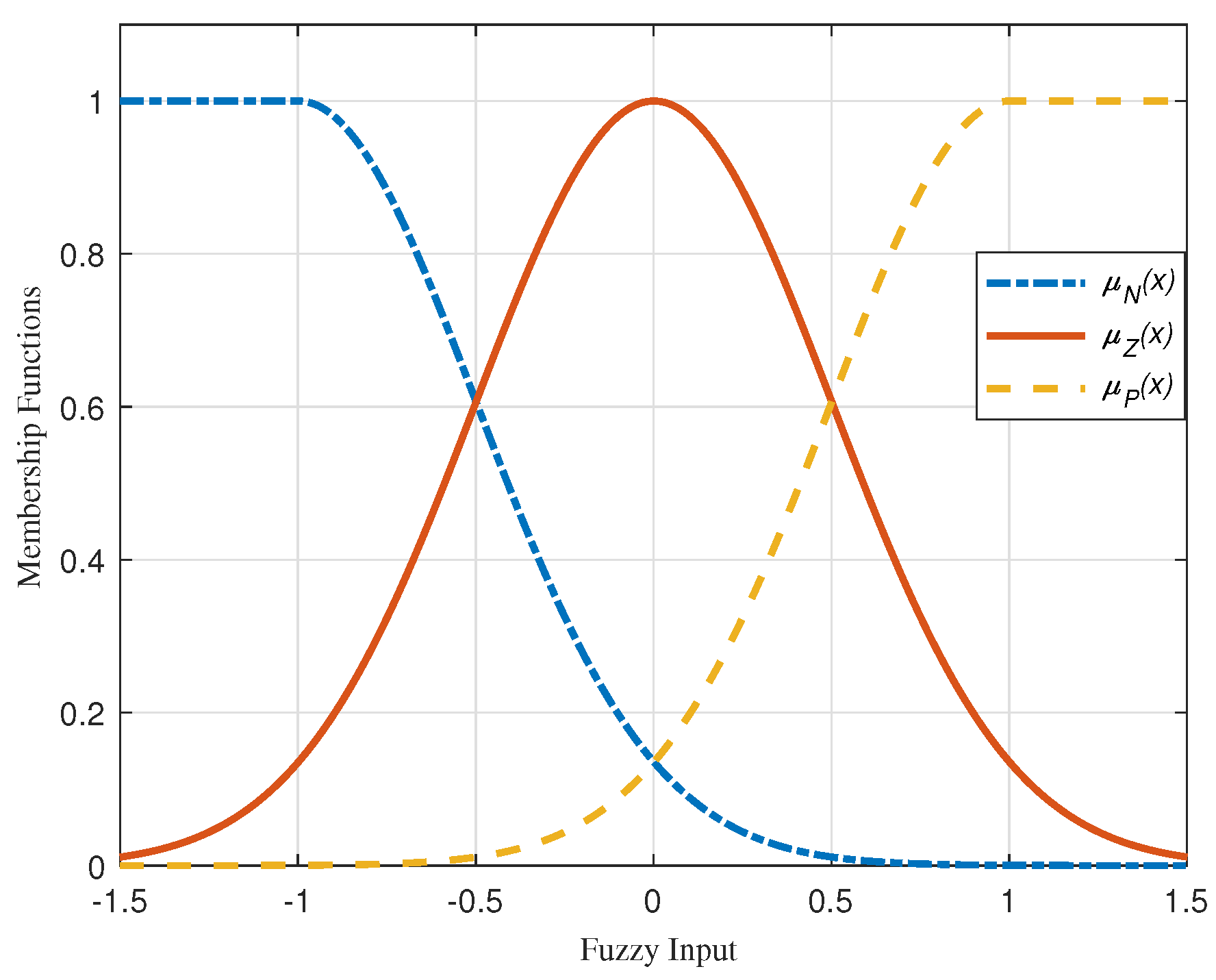
Figure 2.
Block diagram illustrating the developed scheme and the robot’s task space.
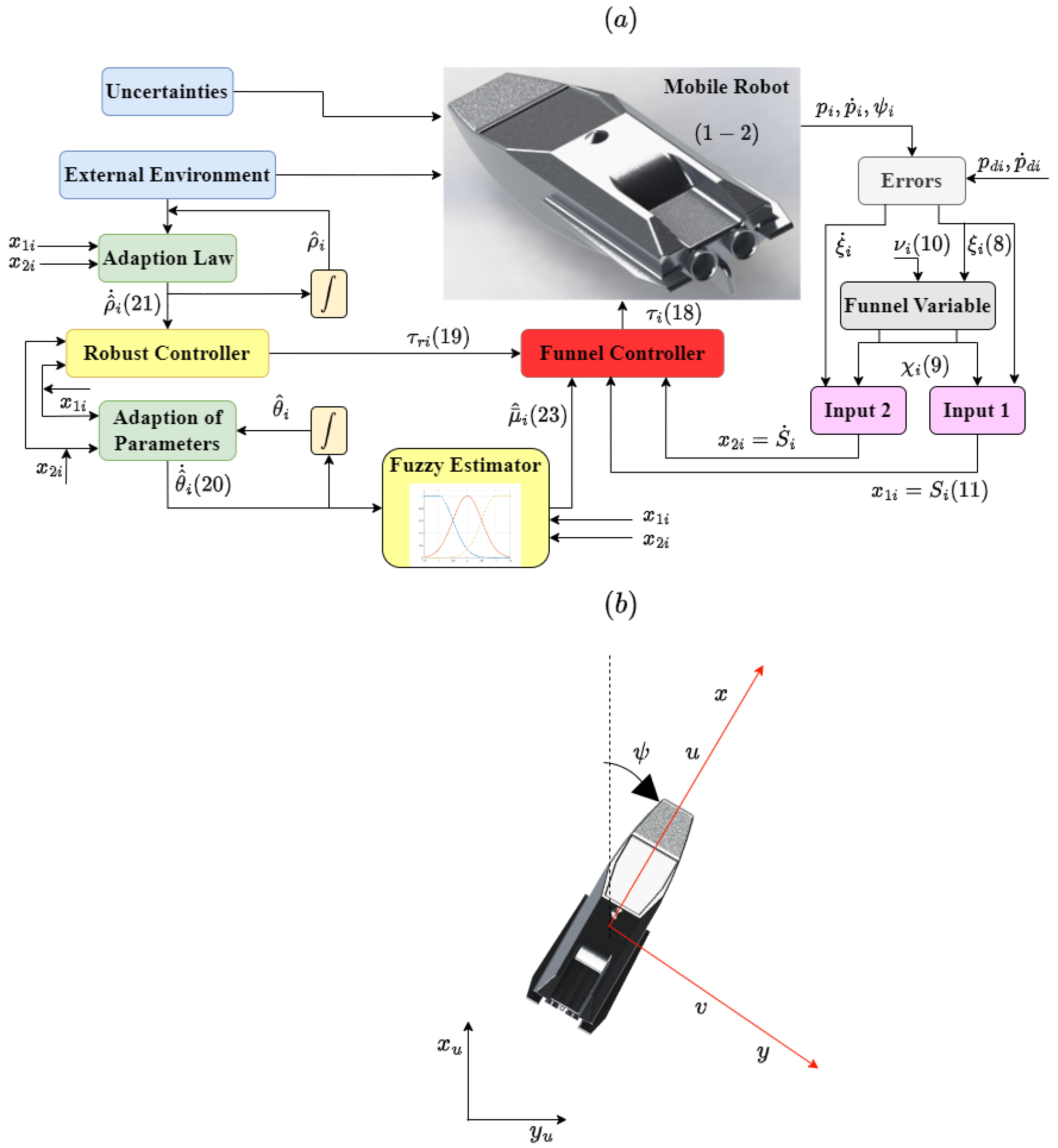
Figure 3.
Trajectories of the mobile robot.
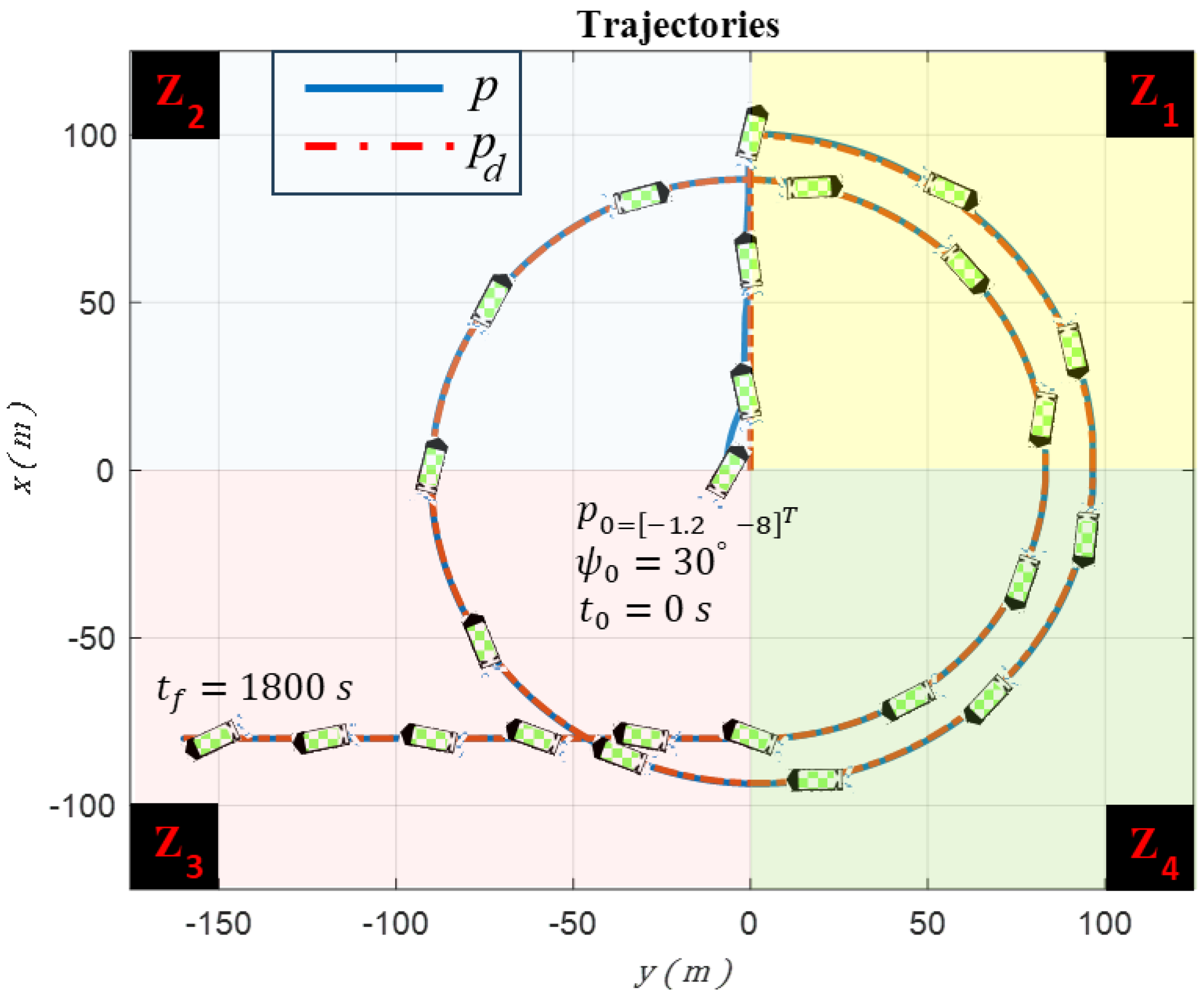
Figure 4.
Heading angle of the mobile robot.
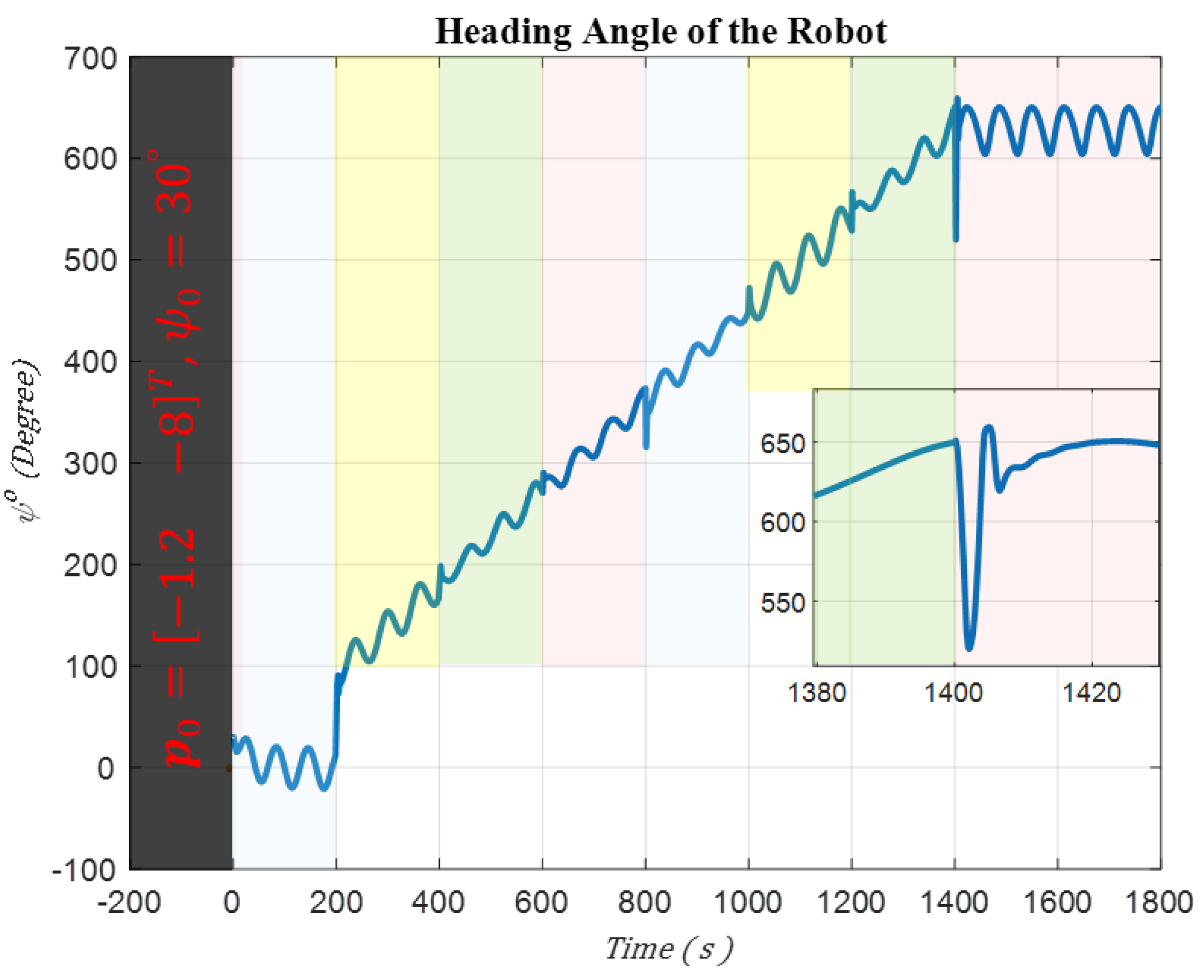
Figure 5.
Error evolution in the proposed funnel control.
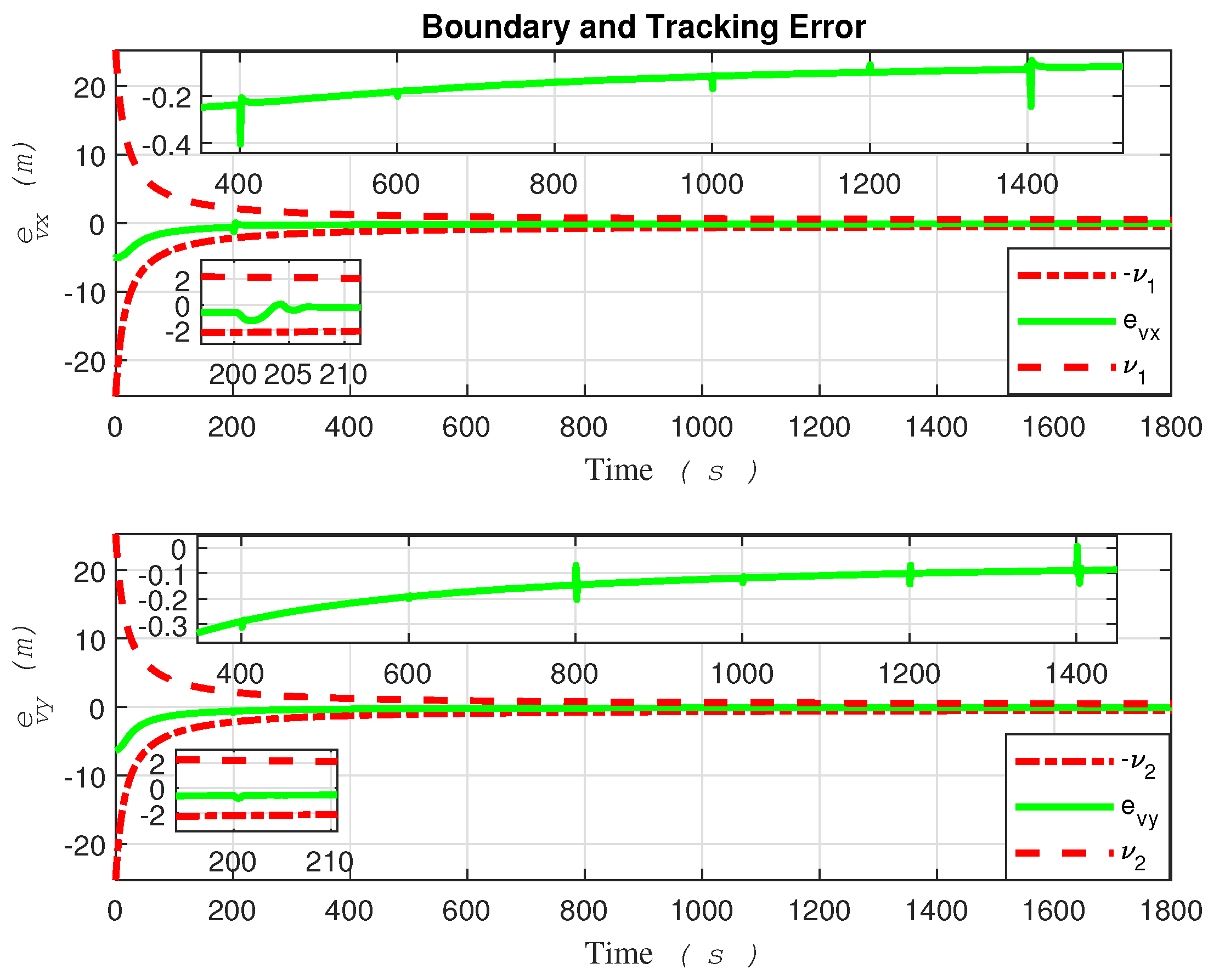
Figure 6.
Control signals exerting to robot’s actuators.
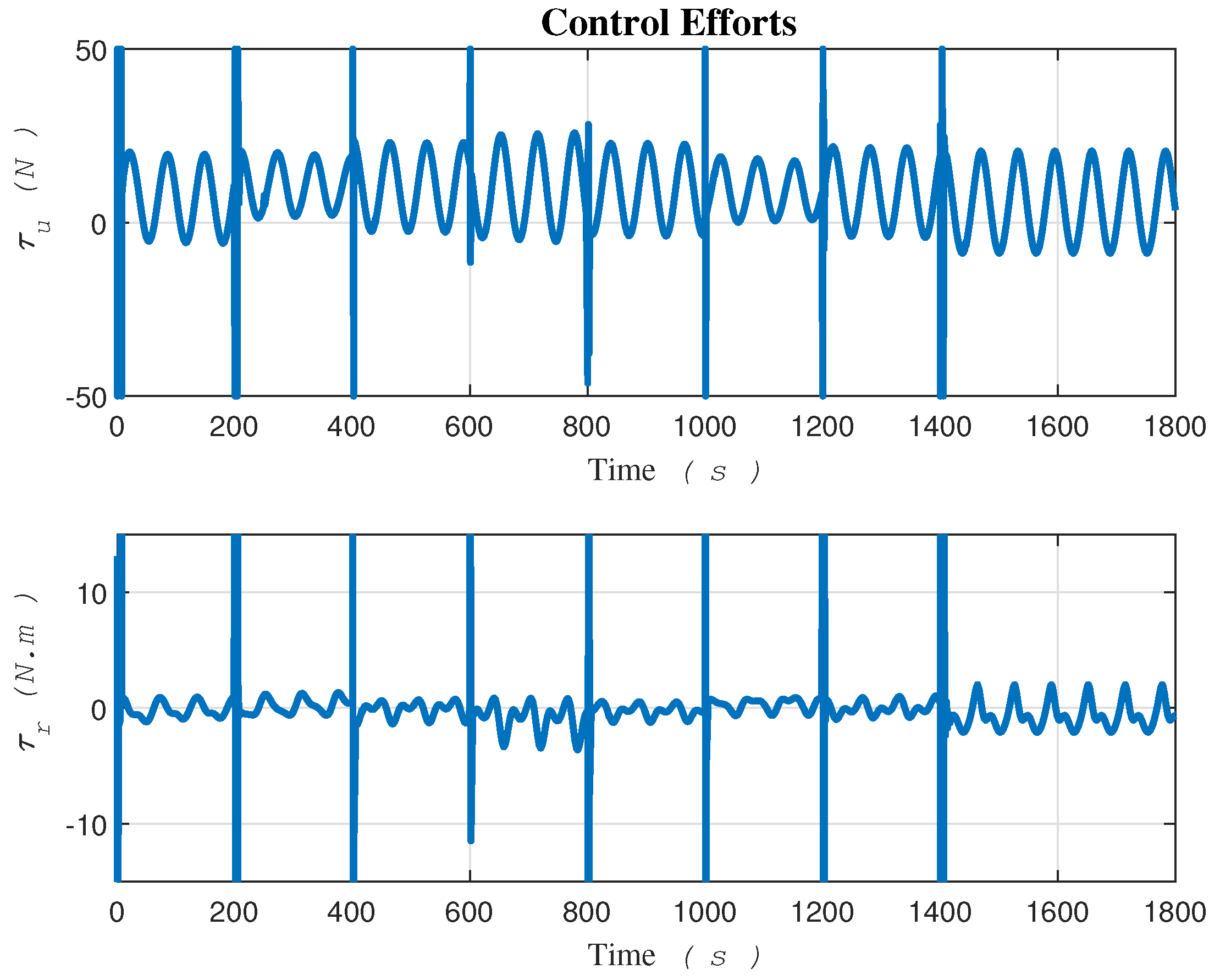
Figure 7.
Internal behavior of the system.
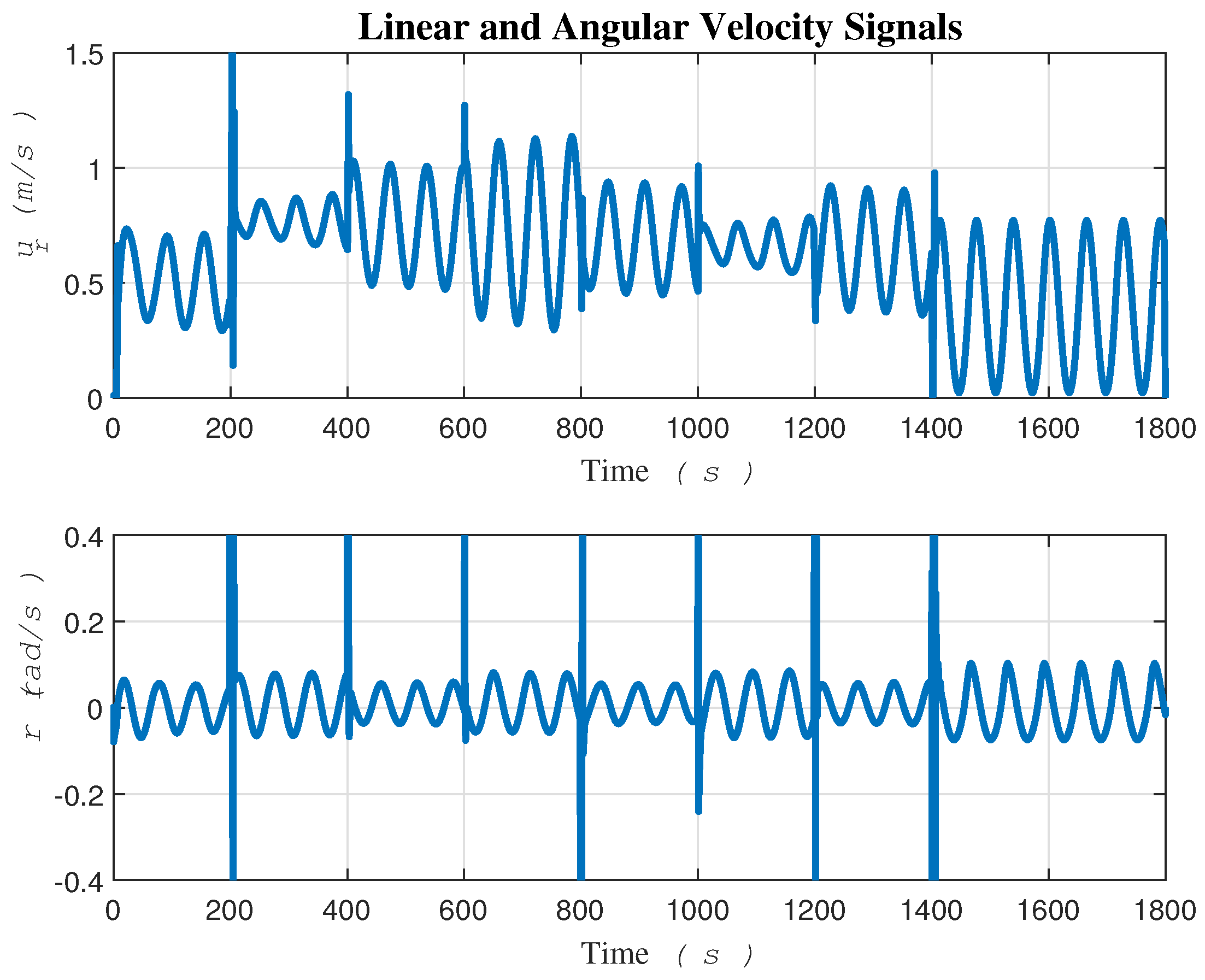
Figure 8.
Adaption parameters of the fuzzy estimators.
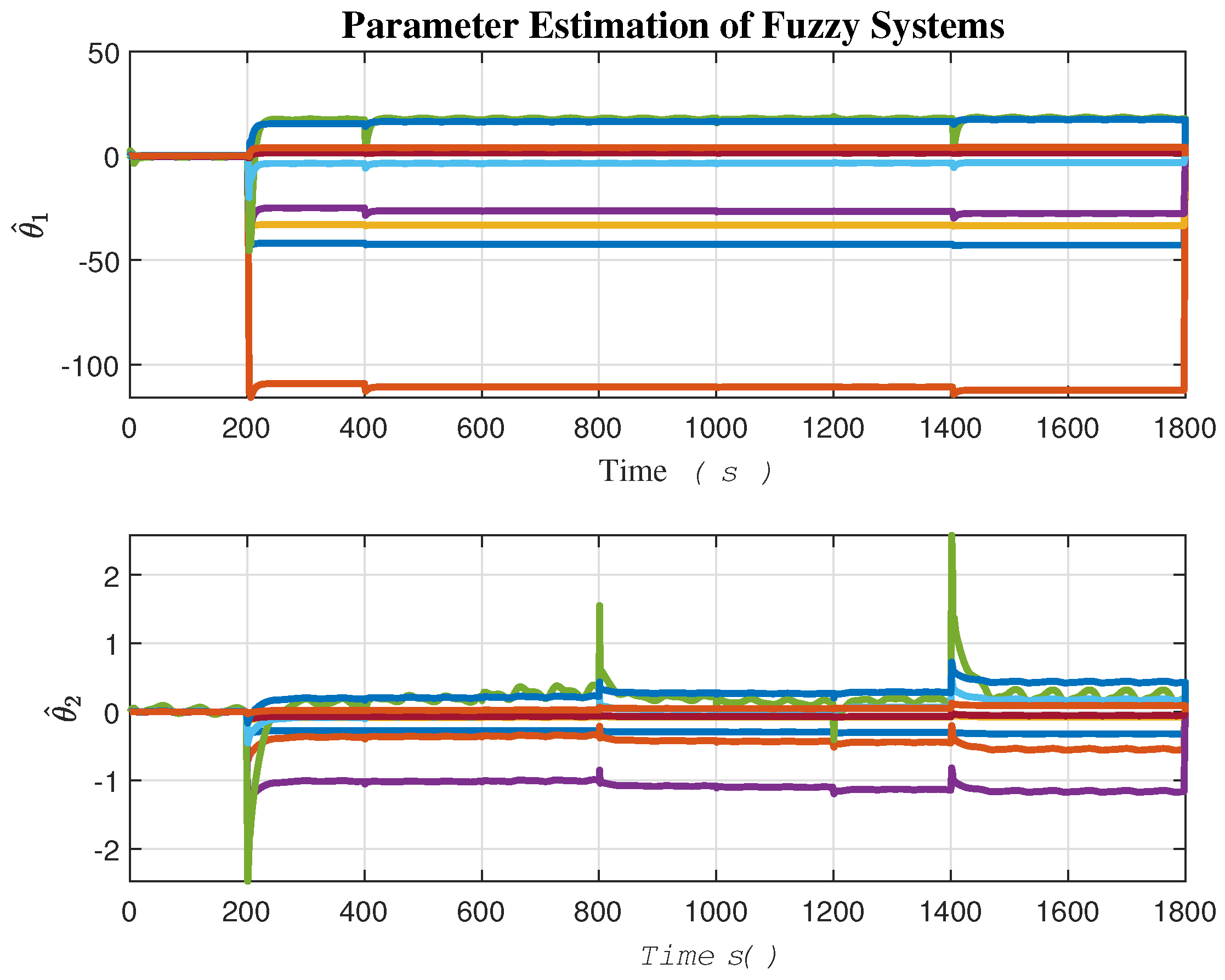
Figure 9.
Adaption parameter of the robust control.
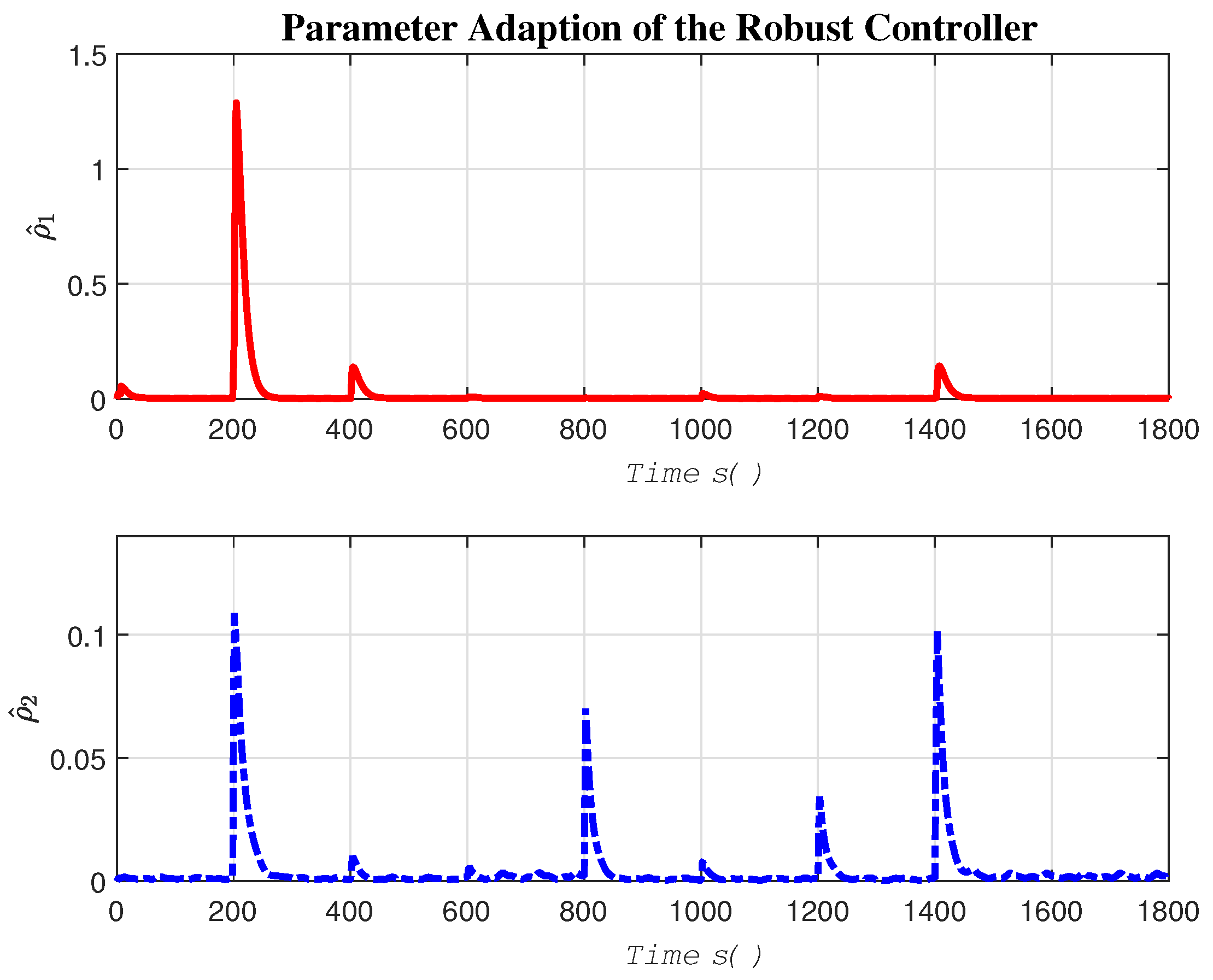
Figure 10.
Error evolution in the gradient-descent control [15].
Figure 10.
Error evolution in the gradient-descent control [15].
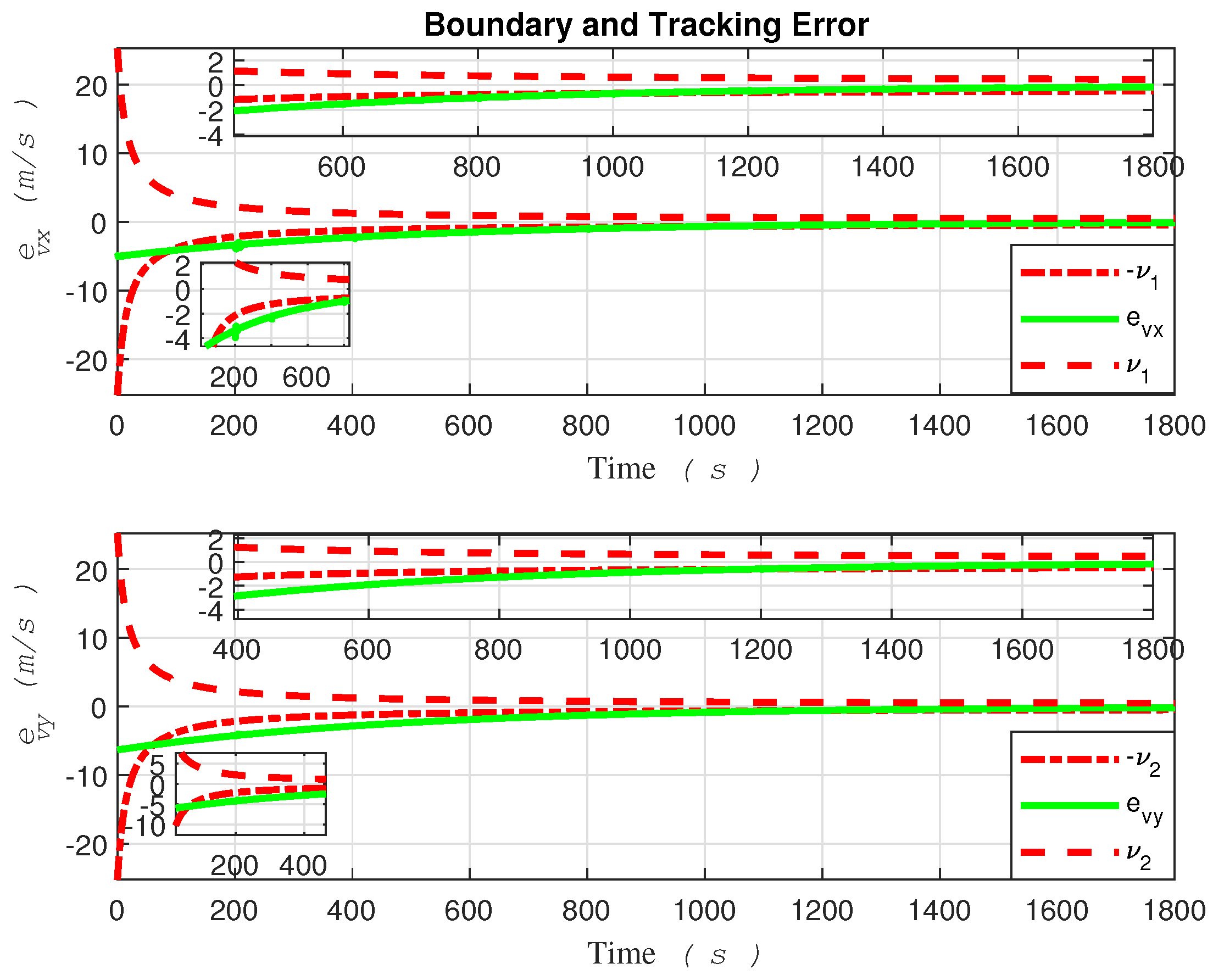
Figure 11.
Inner-loop control signals in the gradient-descent approach [15].
Figure 11.
Inner-loop control signals in the gradient-descent approach [15].
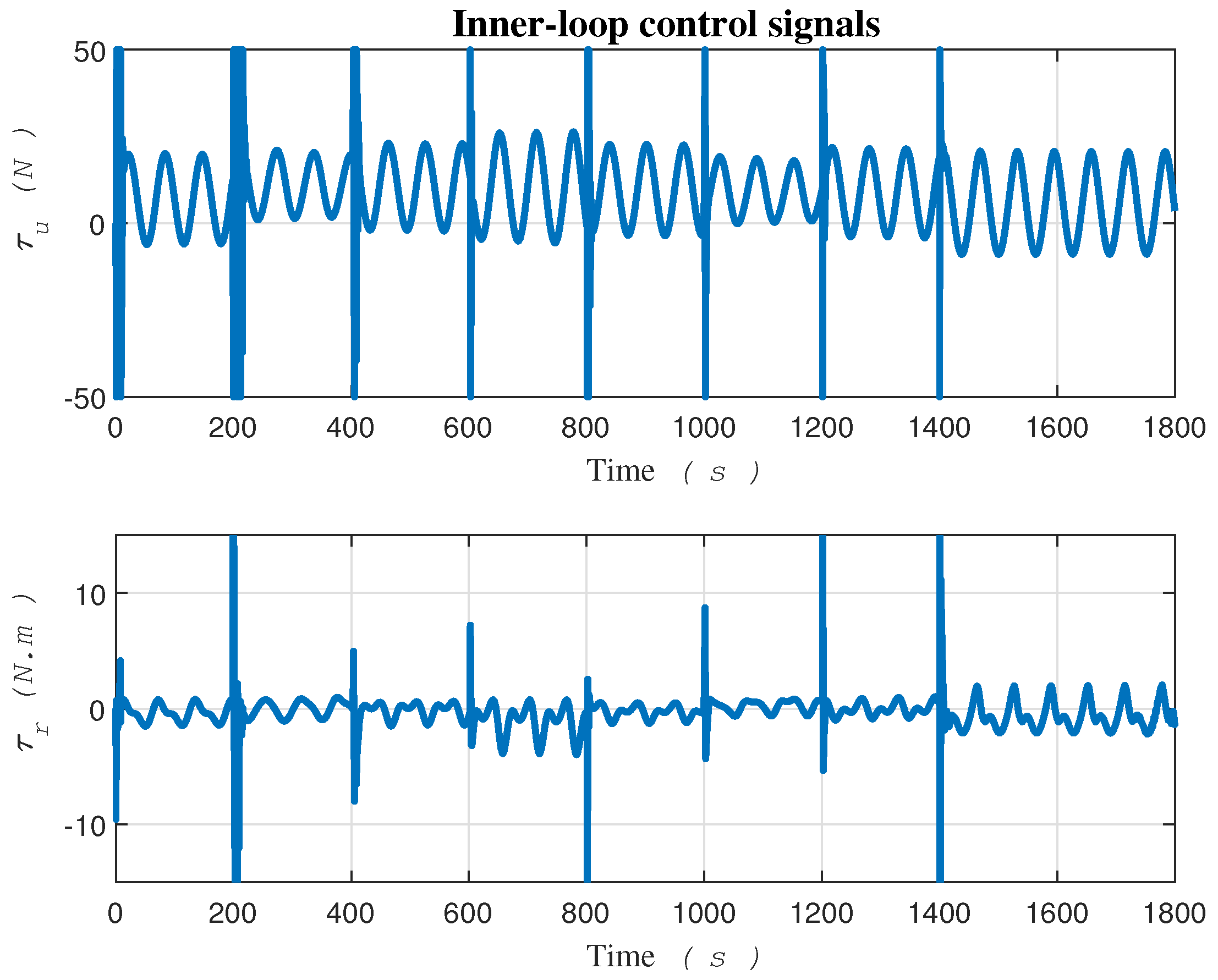
Figure 12.
Outer-loop control signals in the gradient-descent approach [15].
Figure 12.
Outer-loop control signals in the gradient-descent approach [15].
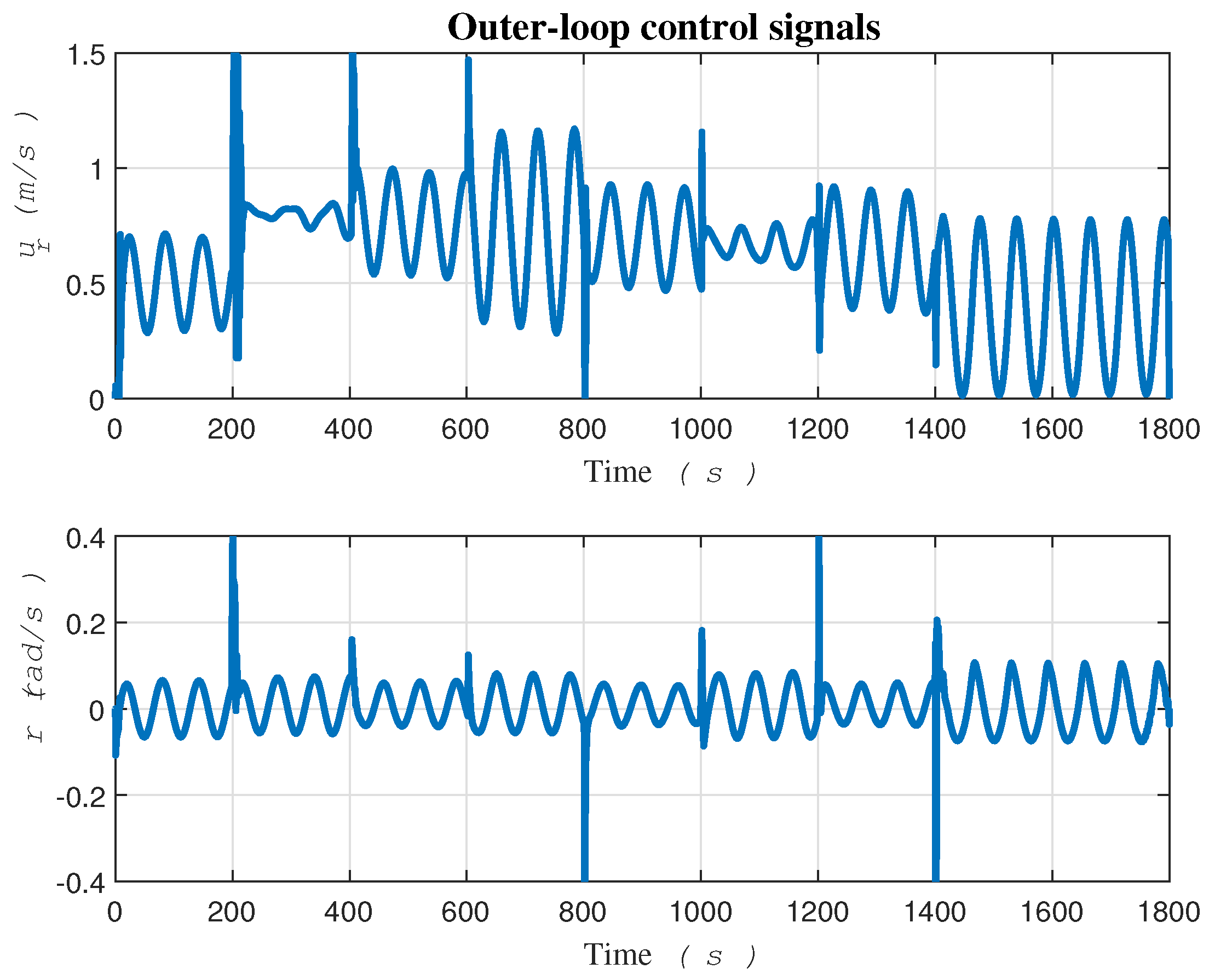
Figure 13.
Comparison of the two norm errors of the proposed and gradient-descent based control.
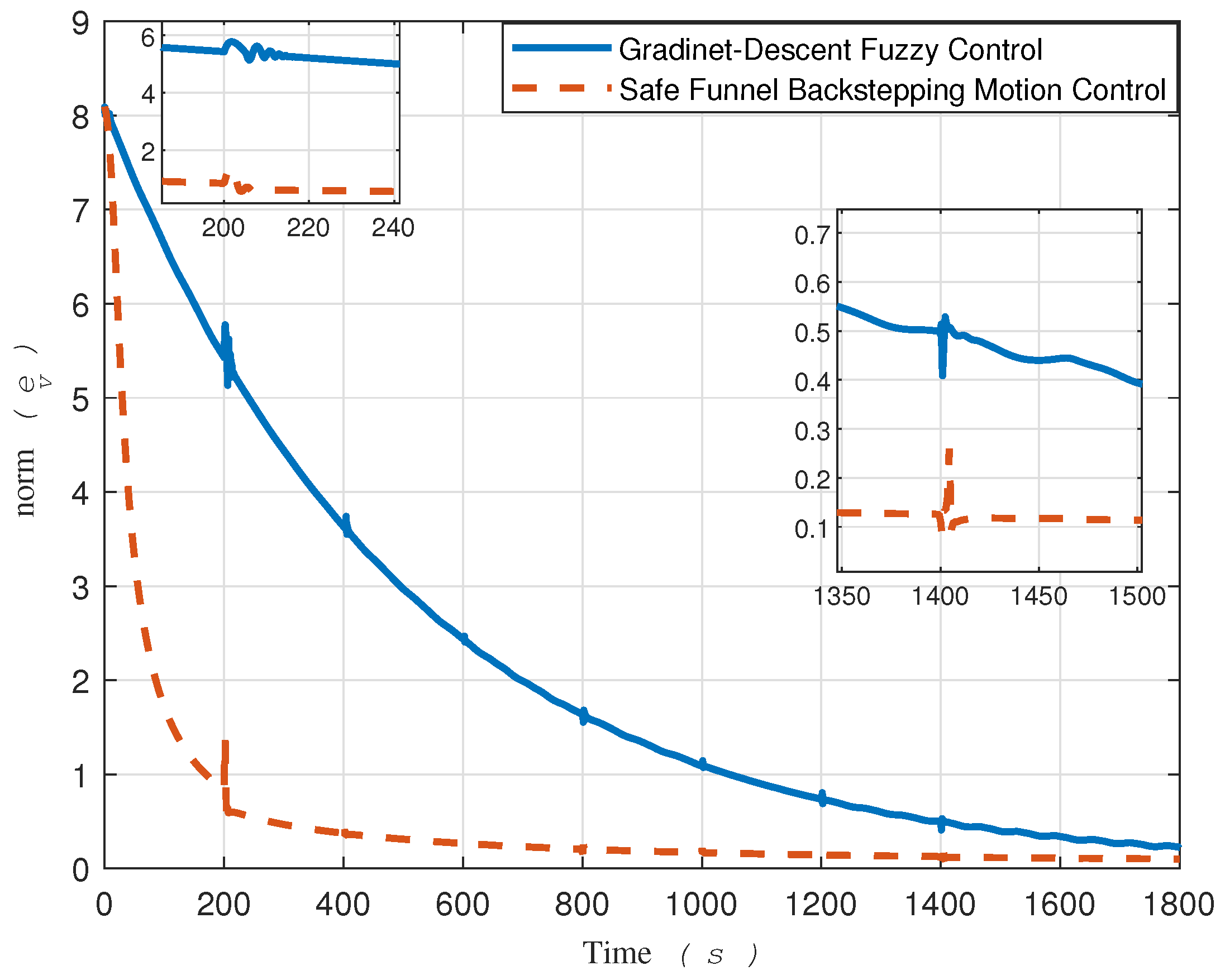
Table 2.
Proposed control method specifications.
| 25 | 0.25 | 0.8 | 0.06 | 8 | 39.5 | 0.1 | 0.2 | 20 | 8 | 0.0005 | 0.1 | 0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



