
Submitted:
30 May 2024
Posted:
31 May 2024
You are already at the latest version
Abstract
Road traffic accidents are associated with different factors, such as non-signalized road networks, inexperienced drivers, lack of communication skills, distraction, and visual or cognitive impairment of road users, which have led to this increase in traffic accidents. Understanding these factors in alignment with road user communication skills can provide solutions that can reduce traffic fatalities. Road users’ communication is predominantly formal in nature, but informal means of communication also exist but are not given proper attention during the driving training and licence testing processes. Therefore, this study investigated communication skills between drivers as a factor contributing to traffic accidents in South African cities. Consequently, 16 traffic scenarios of communication between drivers were simulated using PTV Vissim and Blender software, and a semistructured interview questionnaire was used to collect data from South African road users. The questionnaire was further used to evaluate the confidence level of road users concerning informal communication. The data were analysed via regression analysis to establish the relationship between traffic accidents and miscommunication between drivers. The information gathered and analysed from this study helps to understand the informal communication types between drivers and establish where communication loss exists, which ultimately leads to a traffic accident. The results also show that misinterpretation of communication signals can present the possibility of traffic safety risk.
Keywords:
traffic safety
; road users
; communication
; road traffic accidents
1. Introduction
Road traffic accidents (RTAs) represent a significant global public health concern, causing immense human suffering and economic losses [1,2]. According to the World Health Organization (WHO) Report, approximately 1.19 million people die each year because of an RTA, and more than 20 and 50 million people suffer nonfatal injuries that result in disability [2]. The multifaceted nature of these incidents demands a comprehensive exploration of their causes to inform effective prevention strategies. The literature has shown that several factors related to humans, vehicle roads, and the environment contribute to this complex system [1,3,4,5,6]. The complexity of the system is, however, primarily centred around human factors, as human factors are the major contributors to traffic accidents [5,7]. This factor is complex because of the behaviour of road users, and various elements, such as perception and reaction variability, behavioural factors, risk taking, stress, distraction, fatigue, experience, age, alcohol and lack of understanding of road users’ interactions, have been said to contribute negatively to RTAs [2,5,7,8,9].
All the aforementioned elements have been widely researched in the literature. However, road user interactions, including interactions between drivers and between pedestrians and between drivers, have not been extensively studied [10]. This is especially true for informal communication between road users [1,10,11,12].
1.1. Interactions between Road Users
Interactions between road users are established through communication; this communication can be verbal, nonverbal, or sign-mediated, and it is essential for individuals and institutions to make meaning out of a series of activities [10,13,14]. Communication, which includes road networks, is also key to the existence and survival of people in society. Communication occurs among road users via various media, such as road traffic signs, vehicle-to-vehicle interactions, vehicle-to-human interactions through formal signals, and other methods, which are usually referred to as road language. Furthermore, road language can be categorized into formal device-based signals (formal signals), formal hand signals (formal signals), informal device-based signals (informal signals), and informal gesture-based signals (everyday signals) [1,10,11,12,13,15]. Overall, language plays a vital role in human communicative needs and activities. It can be written or spoken, verbal or nonverbal, or social or expressive [13,14].
Verbal and nonverbal communication in road traffic plays a crucial role in ensuring road safety and efficient traffic flow [12,16]. However, verbal communication involves the use of spoken language, often facilitated by traffic signals, signs, and verbal cues such as horn honking [17]. Numerous studies [1,3,10,12,13,15,17,18] have highlighted the significance of clear and standardized verbal communication in guiding drivers, pedestrians, and cyclists through the intricacies of road networks.
On the other hand, nonverbal communication encompasses body language, facial expressions, and gestures that contribute to the overall traffic communication environment [15,16]. Research suggests that nonverbal signals, such as eye contact between drivers and pedestrians, can enhance mutual understanding and facilitate safer interactions [15,19]. Additionally, nonverbal signals, such as hand gestures between drivers, serve as informal means of communication [1,10,12], conveying information about intentions and navigating right of way. The effective integration of verbal and nonverbal communication systems into autonomous vehicle systems is essential for minimizing misunderstandings in interactions with human-driven vehicles and reducing the likelihood of accidents [1].
1.2. Informal Communication on Roads
Road user encounters that are impromptu and nonstandard fall under the category of informal communication. Nonverbal cues help to establish mutual understanding, acknowledge rights-of-way, and promote informal communication. Examples of these cues include hand gestures, eye contact, head nods and the use of various vehicle channels, such as headlights, hazard lights and blinkers [12]. When formal cues are lacking or unclear, such as at intersections without traffic lights or during lane mergers, informal communication frequently occurs [1].
Informal communication also includes unwritten driving laws [1] and social norms [12], such as stopping for pedestrians at crosswalks and letting merging cars into traffic. These unwritten rules are a fundamental part of driving culture and help to make traffic flow smoothly and efficiently. Informal communication, on the other hand, can vary from one society to another or mostly from country to country. Overall, if the intent of the message conveyed through informal communication is not properly understood by other road users, mistakes and errors may occur [1,15,20]. However, formal signals are based on explicit learning, which occurs during driving training and the licence testing process [10], and informal, implicit learning occurs unintentionally during the actual driving process on the road [1].
In South Africa, informal communication of the road is widely available and used on a daily basis; some examples include “hazards to say thank you”, “flash the lights to give right of way to others”, and “hand gesture for location request to driver”. [1]. Furthermore, in South Africa, informal communication occurs between vehicles and drivers and between pedestrians and drivers, and vice versa. However, it is worth noting that the message conveyed by informal communication can be interpreted by the frequency of occurrence, the location on the road and the event at hand. Nevertheless, advances in technology, such as autonomous vehicles, smart traffic lights and interactive road signs, further enhance communication by providing real-time information to road users. As traffic systems evolve, continued research into optimizing both verbal and nonverbal communication channels will contribute to the development of safer and more efficient transportation networks [1,10,12]. Nonetheless, the following questions remain: What is the level of understanding of road communication among road users in South Africa? What are the consequences of misinterpretation of communication on South African roads? What is the communication between human-driven vehicles and autonomous vehicles? This study aimed to understand the contribution of driver communication skills to traffic accidents on roads in South Africa.
2. Materials and Methods
This study used a rigorous approach to data collection and analysis, drawing on established methodologies and statistical tools. The Durban study area in the KwaZulu-Natal province of South Africa served as a critical backdrop for investigating road safety concerns through quantitative measures. To enhance the realism of video scenarios, this study applied PTV Vissim for microsimulation and Blender for 3D modelling, drawing on prior research insights. Additionally, this study used chi-square analysis to establish relationships between variables, and the application of a risk analysis matrix enriched the methodological framework.
2.1. Study Area and Quantitative Data Collection
Durban, the largest coastal city in the KwaZulu-Natal province and the second most populous urban area in South Africa after Johannesburg and Cape Town, serves as the focal point for this study. The decision to choose Durban was substantiated by the alarming increase in road fatalities reported in the KwaZulu-Natal province during the first quarter of 2020 [21]. Despite a national decline of 10% in traffic fatalities for the entire year, KwaZulu-Natal saw only a 5% reduction, marking the lowest decrease among provinces, except for Limpopo and Gauteng, which experienced increases [22].
To gather quantitative data, a questionnaire method was employed, targeting road users in Durban, KwaZulu-Natal. The survey was hosted on the QuestionPro online platform, with links distributed to various driving schools in Durban and individual drivers selected randomly. A total of four hundred respondents participated, and their recorded responses were collected. The questionnaire comprised four sections: the first section focused on providing research participants with general information about the study as well as the survey (e.g., survey’s aim, objectives) and their involvement in accommodating their understanding to seek their participation consent. The second section focused on demographic characteristics, including age, gender, and road user category. The third section delved into participants’ driving experiences, particularly in informal communication scenarios. The fourth section explored respondents’ validation and comprehension of informal communication dynamics. (Table A1).
This robust quantitative approach not only captures the demographic landscape of road users in Durban but also delves into the nuanced aspects of their driving experiences, shedding light on informal communication patterns. The questionnaire’s four-tier structure facilitates a comprehensive understanding of the subject matter, providing valuable insights that will contribute to a more profound grasp of road safety issues in this critical urban context.
2.2. Video Development through PTV Vissim and Blender Software
In this study, the imperative need for videos to accompany the questionnaire arose from respondents’ necessity for visualizing communication scenarios. The study faced the choice of creating videos (stimuli) from field experiments through traditional videography [10,12] or 3D visualization modelling. The latter were chosen because of the challenges associated with field experiments, such as difficulty in controlling situational factors influencing road user behaviour [12]. However, there is a challenge associated with 3D visualization modelling centers for achieving real-life 3D depictions of both formal and informal communication scenarios. Realism in this context extended beyond high-quality 3D graphics, encompassing a realistic representation of driving behaviour. These included capturing parameters such as acceleration, deceleration, lane changes, vehicle speeds, hand movements, and car signalization lights, all of which were successfully incorporated into the study [23].
Hence, this study harnessed the capabilities of two software applications to realize the development of these scenarios. PTV Vissim, a microsimulation software designed for analysing smaller areas such as intersections, traffic signalization, and pedestrian crossings, served as the initial platform [23,24,25,26]. By inputting data such as the number of vehicles, speeds, vehicle structure, and acceleration/deceleration tables, this study evaluated various traffic solutions. However, due to limitations in detailing interactions between vehicles, the study also incorporated Blender, a professional 3D software [27]. Blender, which is specifically designed for modelling, rigging, animation, simulation, and rendering, addressed the shortcomings of PTV Vissim. Unlike Vissim, Blender did not automatically generate traffic, providing the study with the necessary flexibility [26,27,28].
Within PTV Vissim, the road network, comprising lanes, intersections, and traffic signals, is systematically designed. Different vehicle types and routes are created, and the acceleration and maximum speed of each vehicle type are determined. To attain realism, driving behaviour is calibrated by adjusting characteristics such as acceleration rates and following behaviour. Vissim simulates traffic flow and observes vehicle interactions. Once the simulation is complete, Vissim exports the data as animation files. These data are then imported into Blender to produce a 3D scene mirroring the Vissim road network. Vehicles within the scene are animated, and their movements are accurately simulated using imported trajectories (Figure 1). The rendering settings are configured for optimal results, and cameras and lights are positioned to capture the desired angles. The blender renders the animation, generating simulation frames [23,24,25,26,27,28]. The process of visualizing simulated traffic dynamics concludes with the animation being exported as a video file.
Overall, fourteen signals (formal and informal) in traffic situations on South African roads were used as sixteen stimuli. Each scenario or stimulus within the video project was crafted with a unique narrative, drawing on guidelines established in a previous study by Adedeji and Feikie [1]. Using these guidelines, the study meticulously configured parameters for every vehicle, including speed, position, signalization, acceleration, braking, driver hand movement, and light flashing. The suspension was even modelled to simulate realistic accelerating and braking dynamics. Consequently, the study achieved a remarkably authentic representation of driving behaviour. The culmination of precise vehicle movements and high-quality 3D graphics resulted in animations that realistically replicated real-life situations. These animations, rooted in previous research and tailored for driver education, promise to be invaluable tools for enhancing driver understanding and awareness.
2.3. Data Analysis
The data were analysed using the QuestionPro analysis package, SPSS, and Microsoft Excel. Standard descriptive statistics are reported as frequency counts (%) for categorical variables. Chi-square analysis was used to establish relationships, and risk analysis was performed to identify various scenario misunderstandings that can result in catastrophic incidents.
Chi-square analysis was used to determine if there was a significant association between two categorical variables. It is particularly useful for analysing data in contingency tables, where each cell represents the frequency of occurrences for combinations of the two variables [5,29,30]. The test assesses whether the observed distribution of frequencies differs significantly from the distribution that would be expected by chance.
The formula for the chi-square statistic is (equation 1):
where is the chi-square statistic.
is the observed frequency in cell
is the expected frequency in cell
A high chi-square value indicates a significant difference between the observed and expected frequencies. The null and alternative hypotheses for the testing were as follows:
Ho: The driver’s experience and his/her view of informal communication are independent of each other.
Hi: The null hypothesis is not true.
Risk analysis, on the other hand, is a systematic process of identifying, assessing, and managing potential risks or uncertainties that may impact the objectives or outcomes of a project, decision, or operation [31,32,33,34,35]. It involves a structured examination of the potential events that could affect the achievement of goals, along with an evaluation of the probability and severity of those events [31,33,34] (equation 2). The goal of risk analysis is to enable informed decision-making by providing a clear understanding of potential risks and their potential consequences [32]. This is being further achieved with the use of a risk analysis matrix [31,33,34,35]. In this study, risk analysis is used to establish the relationship between the confidence level (severity) of road users and the probability of occurrence of events on roads in relation to the possibility of traffic accidents.
Risk = Severity of Harm (S) x Probability of Occurrence of Harm (POH)
3. Results
3.1. Respodents Demography
Table 1 presents the demographics of the survey respondents in Durban, South Africa. Among the respondents, more than half were males (77%). The largest proportion of respondents were aged 18 to 24 years, which also accounts for the largest population at the national level. Regarding education level, 46% and 38% of the respondents held a university degree and a high school certificate, respectively. In terms of the road user group, 63% of the respondents were drivers (the highest proportion), while 37% were passengers. The survey also revealed that 4.7% of the respondents were novice drivers with zero to two years of driving experience, while the majority (41%) had 10-20 years of driving experience and were considered expert drivers (3 years and above). In addition, the majority of the participants (42%) had 1-3 traffic fines for violations of traffic rules in the past year, and 38% had no traffic fines. The profile of the respondents indicates the different types of survey participants regarding age, gender, level of education, road user category, driving experience, and traffic violations, indicating the diversity of the research participants in this study.
Additionally, Figure 2 presents the self-rating results of the respondents in terms of their level of understanding of the two forms of communication on South African roads. The results show that there is a similar pattern in the trends of the responses to the questions. The majority (64%) of the respondents rated their level of understanding of both communications as good, while 16% rated it as fair. These results show that self-ratings are primarily overestimated, and it is worth noting that overestimation of one’s ability can lead to risky behaviours [36,37,38].
3.2. Availability and Classification of Communication Methods for South African Roads
The results in Table 2 present the current types of informal communication available on roads in South Africa, and this study tends to classify them into the various meanings available, the channel used for the establishment and the categories of communication based on the Renge [12] study and the Vienna Convention on Road Signs and Signals [39]. Seven items of meaning were proposed:
- Intention: as ‘indication of the future behaviours’
- Demonstration: as ‘indication of the behaviours underway’
- Emphases: as ‘attracting others’ attention’
- Notices: as ‘reminding others of potential hazards’
- Orders: as ‘strong commands to others’
- Social etiquette and displeasure are the emotional expressions of drivers [10].
It is important to note that in many situations, a single signal could contain several meanings simultaneously, and these items were not always exclusive to each other. For instance, horn honking during congestion often carries a strong message of both ‘order’ (e.g., ‘stay out of the way’) and ‘displeasure’ [10,11,12,15]. This is also evident in the results in Table 2, as six of the stimuli can be classified as orders and five can be classified as intention/demonstration grouping. Furthermore, the stimuli are classified into formal and informal categories, and eight stimuli fall into each category. In terms of signal types, five of the 16 stimuli were classified in the first category, “formal device”, eight stimuli in the second category, “informal devices”, and three stimuli in the third category, “formal gesture-based signals”.
Additionally, according to the Vienna Convention on Road Signs and Signals [39], there are four categories of traffic signals:
- Danger/warning alters drivers of impending danger ahead.
- Regulatory inform road-users of special obligations, restrictions or prohibitions with which they must comply.
- Information provides drivers with a causal compliment or suggests decisions that can be made by the drivers.
- Others. Classes were added to inform road users about important situations.
In terms of categories based on the Vienna Convention on Road Signs and Signals, the results show that nine of the stimuli can be classified as regulatory, four as danger/warning and three as information.
3.3. Comparing Novice and Expert Drivers’ Understanding of Communication
In this section, the respondent groups’ answers to the alternatives for each stimulus’s meaning were compared. In the current study, the stimulus’s most popular choice was always considered to be the right one, which also corresponded with the results of a study by Adedeji and Feikie [1]. The option that was determined to be correct in the stimulus-generating process and the signal comprehension score was always the same as the correct response [12]. The outcomes confirm that the process for creating experimental stimuli is valid. Figure 3 shows the correct answer rate for the two classes of drivers (novice and expert). While the expert group had good overall accuracy, as expected, the novices were more accurate on two stimuli, S13 “Blinker of a car turning left to off ramp” and S14 “Hazard lamps of a stopping car roadside”, which fall in formal and informal categories. The accuracy of the novice for S13 and S14 could be due to the novelty of the driving lesson and test, while S14 is one of the most popular informal signals (Figure 4).
Additionally, Table 3 presents the results of the chi-square analysis on the answer rates using a 5% level of significance with a degree of freedom (df) of 1. The results show that eight of the stimuli (S1, S2, S5, S6, S8, S10, S11, and S15) have a significant relationship with the drivers’ experience, while the rest are not significantly associated, implying that expert drivers are more likely than novices to provide a correct answer. Overall, additional chi-square analysis revealed that age, gender, and educational level significantly influenced understanding of formal and informal communication.
3.4. Confidence of Answers for Drivering Experienec and Road Users
The mean confidence levels of the responses by participant group and stimulus are displayed in Figure 5. The mean confidence of experienced drivers was not significantly different from that of novice drivers; nonetheless, novice drivers tended to have higher levels of confidence overall. For S12, S14, and S15, there were clear disparities in the novice drivers’ confidence regarding informal signals and S13 for formal signals (Figure 6), which might have resulted from the lower percentage of novice drivers participating in the study. Furthermore, an analysis based on respondents’ gender and mean confidence was conducted, and the results also showed that there was no significant difference in male or female driver responses.
3.5. Risk Analysis of Traffic Accidents/Safety
For the risk analysis in this study, a high confidence level of a response is taken as 1, while a response of 5 indicates very low confidence in the decisions made (indicating higher risk). A response of 1 indicates a very low likelihood of occurrence, and a response of 5 indicates a high likelihood of an accident occurring (Table 4). Using this scaled approach allows for a more nuanced understanding of both decision-making confidence and the perceived likelihood of a traffic accident. The combination of these responses can provide valuable insights into the potential risks associated with the decisions made regarding safety measures.
Table 5 further shows the details of the risk analysis results. Two (12.5%) of the scenarios were found at high risk 9, which included formal and informal risk, and 5 (31%) were moderate-high risk (majority informal). Additionally, 6 (38%) of the scenarios were moderate risk, while the rest were between moderate-low or low-moderate risk. From this analysis, it can be concluded that those scenarios at the moderate risk level need action; however, the high-risk results need higher action priority to mitigate the possibility of traffic accidents. Overall, high-risk results need to be prioritized in terms of the standardization of signals for informal communication and educational awareness to road users.
Additionally, the respondents were asked to classify the scenarios into two categories of communication (formal and informal) based on the stimuli presented per question. The results show that the majority (6 of 8) of informal communications had a score lower than 50%; that is, they were categorized as formal communications. The analysis shows a great disparity compared to the self-rating of the understanding of communication. Furthermore, there were great concerns about stimulus S14, “Hazard lamps of a stopping car roadside”, with 7% correct answers indicating informal communication. The use of hazardous lamps in this case is informal, as the formal action in the case of a car breakdown/problem will be to use the hazard triangle [40]. The use of headlight blinkers, as in S3, S6, S12, and S15, is informal, as the original design for the use of highlights in vehicles is to illuminate the road ahead [41]. Overall, for easy visualization of the scenarios, the links to each stimulus are made available in Table 5.
4. Discussion
4.1. Consequences of Misinterpretation of Communication
The misinterpretation of informal communication on roads between road users can lead to various consequences. However, more concern has increased due to the advent of autonomous vehicles. Hence, the consequences of misinterpretation of communication, especially informal communication between human-driven vehicles and autonomous vehicles, can result in the following:
4.1.1. Traffic Safety and Efficiency
Autonomous vehicles hold great potential for improving road safety and streamlined transportation systems, including eliminating distracted driving, which is a common contributor to traffic accidents involving human-driven vehicles. This has been highlighted by several studies [10,11,12,15]. Nevertheless, in the midst of these developments, there remain possible hazards connected to the misinterpretation of existing road communication signals between human-driven vehicles because of a lack of standardization. Numerous studies have examined the safety implications for vulnerable road users, such as bicycles and pedestrians, particularly in light of the advent of autonomous vehicles [20,45,47,48,49,50]. However, the concept of informal communication is still lacking. Vulnerable road users will be faced with heightened risks when autonomous vehicles fail to accurately interpret their communication (mostly informal) intentions or movements.
Misinterpreting communication signals can also greatly increase the risk of accidents and injuries involving road users according to Scott-Parker et al. [20]. Autonomous vehicles can make dangerous decisions on roads if they cannot recognize small signals from cyclists or pedestrians. Additionally, as autonomous vehicles gradually saturate road networks and interact with human-driven vehicles, misinterpreting signals from other vehicles can cause confusion and frustration in drivers, which can lead to aggressive driving behaviors and road rage [20]. For example, frustration and irritation may arise when human drivers find it difficult to interpret the signals or actions of autonomous vehicles, which exacerbates tensions on the road. Such scenarios underscore the imperative of seamless communication between human drivers and autonomous vehicles to mitigate potential conflicts [15,44,46,51].
Another urgent problem is the disruption of traffic flow caused by misinterpreted communication signals. When human drivers misinterpret the intentions of autonomous cars or vice versa, congestion, delays, and disturbances to traffic patterns may occur. As a result, traffic congestion develops, which hinders the effectiveness of transportation networks and causes inconvenience for drivers. Thus, closing these communication gaps is essential for preventing traffic-related problems and promoting more efficient traffic operations. Traffic accidents may result from drivers and autonomous vehicles misinterpreting gestures, signals, or other informal communication forms [46,48,52]. For example, misunderstood signals can cause incorrect moves that result in crashes or near misses on roads. To avert such dire consequences, enhancing the interpretability of autonomous vehicles and promoting clearer communication mechanisms are imperative [1,10,15,42,46,51].
4.1.2. Psychological and Societal Impact
Repeated instances of miscommunication between human-driven and autonomous vehicles can also erode trust in autonomous technology. If human drivers regularly find themselves unable to anticipate the actions of autonomous vehicles as they can with human-driven actions, doubts about their reliability and safety naturally arise [43,53]. Such scepticism can impede the widespread acceptance and adoption of autonomous vehicles, slowing progress toward a more automated transportation system [43,53,54].
Moreover, persistent misinterpretation can shape negative perceptions of autonomous vehicles among the public [43,46,53,54]. If interactions with autonomous vehicles consistently result in confusion or difficulty, concerns about their effectiveness and safety are reinforced. This negative image hampers efforts to promote their adoption, delaying the potential benefits they offer for road safety and efficiency.
In essence, the psychological and societal impacts of misinterpreting informal communication underscore the critical need for clear and mutual understanding between human-driven and autonomous vehicles. Overcoming these challenges demands not only technological advancements but also concerted efforts to foster trust, raise awareness, and cultivate positive attitudes toward autonomous technology among all road users [43,46].
4.2. Future Application of Informal Communication
The future application of informal communication on roads between human-driven vehicles and autonomous vehicles could play a crucial role in enhancing the safety, efficiency, and overall integration of these two types of vehicles.
4.2.1. Communication Infrastructure and Technologies
The development of autonomous vehicle technologies and communication infrastructure provides a range of strategies for improving communication between human-driven and autonomous vehicles [55,56]. Adedeji and Feikie [1] and Sadaf et al. [57] described an approach that integrates informal communication on a road network to enable V2V (vehicle-to-vehicle) communication, in which autonomous vehicles equipped with advanced sensors and communication systems exchange data with nearby human-driven vehicles. This communication could involve disclosing details about the autonomous vehicle’s intentions, such as lane changes or braking manoeuvres, so that human drivers can prepare and react appropriately [43,46]. A different suggestion is to establish human-autonomous vehicle interaction zones, which are designated areas or interfaces, such as virtual reality, where people operating human-driven cars and autonomous cars can interact informally [58,59]. These zones may utilize specialized communication protocols to facilitate seamless interaction, ensuring safe and coordinated movement on the road [58,59].
Furthermore, Hou et al. [47] suggested that equipping autonomous vehicles with gesture and signal recognition systems is a promising idea. By interpreting hand gestures, turn signals, and other communication signals from human drivers, these systems improve overall traffic flow and safety by enabling autonomous vehicles to comprehend and react properly [1]. Additionally, virtual signalling systems in autonomous vehicles, including LED displays or projected messaging, can provide crucial information to human drivers, aiding them in comprehending the intents and actions of the vehicle [60]. By putting these communication improvements into practice, autonomous car integration into current road networks can be significantly improved, leading to safer and more effective transportation systems.
4.2.2. Behavioural Analysis and Education
Predictive behaviour modelling has entered a new phase with the development of sophisticated AI systems. To identify trends in the behaviour of human drivers, these algorithms systematically analyse enormous volumes of historical data as well as in-the-moment observations [61]. With the help of this abundance of data, autonomous vehicles can predict human driver movements quite accurately. Autonomous vehicles have the potential to greatly improve road safety and efficiency by modifying their own behaviour in response to these forecasts [42].
Additionally, collaborative traffic management is revealed as an important strategy for the incorporation of autonomous vehicles. In this framework, autonomous vehicles play an active role in cooperative traffic management systems, interacting with traffic control centres and human drivers in real time to effortlessly share data and insights. This beneficial connection creates an environment where road safety improves, traffic flow is optimized, and congestion decreases for all parties involved—regardless of whether they use human-driven or autonomous vehicles. Moreover, education and awareness campaigns have become essential instruments for fostering trust and respect between autonomous vehicles and human drivers [43,46]. Stakeholders are educated about the capabilities and limitations of autonomous cars through focused public education campaigns. By fostering a nuanced understanding of autonomous technology, these campaigns pave the way for smoother interactions and communication on the road, thus nurturing a culture of safety and cooperation.
To further ensure the smooth integration of autonomous vehicles into current road networks, regulatory standards and protocols must be established. It is the responsibility of governments and regulatory agencies to provide explicit guidelines and procedures connected to communication between autonomous and human-driven vehicles [1]. These regulations establish a stage for interoperability and harmonious interaction on roads by addressing communication formats, protocols, and safety requirements.
Fundamentally, the incorporation of informal communication between human-driven and autonomous vehicles on highways has great potential to transform the transportation sector. Human drivers and autonomous systems are well positioned to interact with one another through the convergence of cutting-edge technology, cooperative efforts, and strong regulatory frameworks, creating a safer and more effective transportation ecosystem for future generations.
5. Conclusions
The main aim of this paper was to explore the contribution of driver-to-driver communication skills to traffic accidents on roads in South Africa. The study demonstrated that while most South African drivers are aware of the road communication stimuli that are provided, driving experience, age, gender, and educational level all significantly influence the level of understanding. Overall, this research highlights the possibility that novice and less educated drivers may misinterpret communication cues more frequently than experienced and educated drivers, which could lead to increased accident risks. This finding suggests that novice drivers need to be sensitized to informal communication.
In addition, the study classifies communication according to its various meanings, the channels used to establish it, and the classifications derived from Renge’s research [12] and the Vienna Convention on Road Signs and Signals. This classification helps in identifying all the different ways that drivers communicate with one another, whether via formal signs such as blinkers or informal signals such as headlight blinking. The significance of communicating in both formal and informal contexts while driving is highlighted, as misinterpreting these signals could lead to moderate-to-high-risk traffic accidents. This misunderstanding highlights how crucial it is for drivers to understand these communication types to appropriately lower the risk of accidents. Furthermore, the study indicates a noteworthy correlation between the educational level and gender of drivers and their comprehension of how road communication leads to traffic fatalities, suggesting that these factors are important for this specific aspect of road safety.
Future research will focus on applying real-time video processing and deep learning to the integration of informal communication with autonomous vehicle systems. Through this integration, road safety can be improved overall by ensuring that autonomous vehicles can recognize and react to the informal communication signals used by human drivers. Future research will also examine how other drivers interpret the informal language employed by autonomous vehicles, which is essential for promoting productive interactions between these vehicles and their surroundings. Furthermore, more research can be conducted in a variety of contexts to determine how regional variations, the economy, and culture affect road communication and the possibility of including informal communication in learner drivers’ manuals. By taking a comprehensive approach, it will be possible to gain a deeper knowledge of the complexity involved in driver-to-driver communication, which will ultimately lead to safer and more effective road use in a variety of situations. By addressing these aspects, this study lays the groundwork for significant advancements in road safety and autonomous vehicle communication systems.
6. Limitations of the Study
Limited funds constrained the development of stimuli, potentially limiting the findings. Future research should use more resources to diversify stimuli and better understand communication behaviours. The study acknowledges other road communication forms, such as honking, which is not considered in this study, and the study also acknowledges the complexity of road communication, especially in diverse contexts such as South Africa. Additionally, using diverse data collection methods, such as in-person interviews or observational studies, can address biases that might have arisen from online platform usage in this study. Despite these limitations, this research lays a foundation for exploring the communication skills of road users. By addressing constraints and building on existing knowledge, researchers can enhance the understanding of road communication dynamics, informing interventions for societal well-being.
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org. The following supporting information can be downloaded at https://youtu.be/1OPKRFpLkxk
Author Contributions
Conceptualization, J.A.A. and X.E.F.; methodology, J.A.A.; software, D.D. and J.A.A.; validation, J.A.A., X.E.F. and D.D.; formal analysis, J.A.A. and X.E.F.; investigation, J.A.A.; resources, J.A.A.; data curation, J.A.A. and X.E.F.; writing—original draft preparation, J.A.A., X.E.F. and D.D.; writing—review and editing, J.A.A. and X.E.F.; visualization, J.A.A.; supervision, J.A.A.; project administration, X.E.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all the subjects involved in the study.
Data Availability Statement
Data may be requested from the study authors.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A

Table A1.
Questionnaire details for the road users.
| Question | Q">Option/sub-questions | Video Link to Question |
|---|---|---|
| 1. Age | 18-24, 25-34, 35-44, 45-54, 55-64, Above 64 | |
| 2. Gender | Male, female, others | |
| 3. Education | Grade 1-3, Grade 4-6, Grade 7-12, Undergraduate, Postgraduate |
|
| 4. Road Users | Driver, Pedestrian/Passenger | |
| 5. Type of driver ? | Driving Instructor, Commercial Driver, Private Driver | |
| 6. Do you have a Drivers License | Yes, No | |
| 7. Years of driving license | 0-2, 3-5, 6-10, 10-20, Over 20 | |
| 8. How many driving Fines have you received in the past one (1) year? | 0, 1-3, 4-6, 7-10, Over 10 | |
| 9. How well do you understand formal communication between driver to driver communication? | Excellent, Good, Fair, Poor, Very Poor |
|
| 10. How well do you understand informal communication between driver to driver communication? | Excellent, Good, Fair, Poor, Very Poor |
|
| 11. What is the person holding the red flag trying to communicate? (S1) |
5 options to select from for each questions The type of communication -Formal, -Informal How confident are you with your answer? Very confident, Fairly confident, Neutral Not very confident, Not at all confident Possibility of occurrence? Always, Frequently, Occasionally, Rarely, Never |
https://youtu.be/abrXy5DEWIM |
| 12. What is the driver of the truck trying to communicate? (S2) | https://youtu.be/7zdC1RV-GjI | |
| 13. What is the driver in the black car trying to communicate? (S3) | https://youtu.be/L8leSDomeL | |
| 14. What is the driver in the orange car trying to communicate? (S4) | https://youtu.be/L8leSDomeL | |
| 15. What is the driver in the green car trying to communicate? (S5) | https://youtu.be/dOkDM4kzd9I | |
| 16. What is the driver in the green car trying to communicate? (S6) | https://youtu.be/J_4FB6kOpzE | |
| 17. What is the driver in the orange car trying to communicate? (S7) | https://youtu.be/gRINcqabf30 | |
| 18. What is the driver in the orange car trying to communicate with the hand gesture? (S8) | https://youtu.be/I0NQL4pwXrU | |
| 19. What is the driver in the orange car trying to communicate with the hand gesture? (S9) | https://youtu.be/u4nq2jlEUPE | |
| 20. What is the driver in the orange car trying to communicate with the hand gesture? (S10) | https://youtu.be/v3wwdg4JuUM | |
| 21. What is the driver in the truck trying to communicate? (S11) | https://youtu.be/gRINcqabf30 | |
| 22. What is the driver in the blue car trying to communicate? (S12) | https://youtu.be/eYqrp6tXgac | |
| 23. What is the driver in the orange car trying to communicate? (S13) | https://youtu.be/fmrOuHhCM4s | |
| 24. What is the driver in the orange car trying to communicate? (S14) | https://youtu.be/pFgW5Ex-LtI | |
| 25. What is the driver in the blue car trying to communicate? (S15) | https://youtu.be/dN0IbMDKz9s | |
| 26. What is the driver in the orange car trying to communicate? (S16) | https://youtu.be/wfBtHHNcb-M |
References
- Adedeji, J.A.; Feikie, X. Exploring the Informal Communication of Driver-to-Driver on Roads: A Case Study of Durban City, South Africa. J. Road Traffic Eng. 2021, 67, 1–8. [Google Scholar] [CrossRef]
- World Health Organisation, Road traffic injuries. 2023. https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries.
- Adedeji, J.A.; Hassan, M.M.; Abejide, S.O. Effectiveness of communication tools in road transportation: Nigerian perspective. In Proceedings of the International Conference on Traffic and Transporet Engineering, Belgrade, 24–25 November 2016. [Google Scholar]
- Bucsuházy, K.; Matuchová, E.; Zůvala, R.; Moravcová, P.; Kostíková, M.; Mikulec, R. Human factors contributing to the road traffic accident occurrence. Transp. Res. Procedia 2020, 45, 555–561. [Google Scholar] [CrossRef]
- Adedeji, J.A.; Feikie, X.E.; Mostafa, M.M. Risk analysis of drivers’ distraction: Effect of navigation tools. In Sustainable Issues in Transportation Engineering: Proceedings of the 3rd GeoMEast International Congress and Exhibition, Egypt 2019 on Sustainable Civil Infrastructures–The Official International Congress of the Soil–Structure Interaction Group in Egypt (SSIGE) 2020 (pp. 128-140). Springer International Publishing. [CrossRef]
- Megnidio-Tchoukouegno, M.; Adedeji, J.A. Machine learning for road traffic accident improvement and environmental resource management in the transportation sector. Sustainability 2023, 15, 2014. [Google Scholar] [CrossRef]
- Modipa, M. Analysing factors contributing to road traffic accidents in South Africa. Int. J. Res. Bus. Soc. Sci. 2022, 11, 439–447. [Google Scholar] [CrossRef]
- Petridou, E.; Moustaki, M. Human factors in the causation of road traffic crashes. Eur. J. Epidemiol. 2000, 16, 819–826. [Google Scholar] [CrossRef] [PubMed]
- Das, D. Exploring the Linkage Between Human Factors and Road Geometric Elements Influencing the Road Traffic Accidents on the National Roads of South Africa. In Canadian Society of Civil Engineering Annual Conference; Springer Nature Singapore: Singapore, 2021; pp. 15–29. [Google Scholar] [CrossRef]
- Ba, Y.; Zhang, W.; Reimer, B.; Yang, Y.; Salvendy, G. The effect of communicational signals on drivers’ subjective appraisal and visual attention during interactive driving scenarios. Behav. Inf. Technol. 2015, 34, 1107–1118. [Google Scholar] [CrossRef]
- Björklund, G.M.; Åberg, L. Driver behaviour in intersections: Formal and informal traffic rules. Transp. Res. Part F: Traffic Psychol. Behav. 2005, 8, 239–253. [Google Scholar] [CrossRef]
- Renge, K. Effect of driving experience on drivers’ decoding process of roadway interpersonal communication. Ergon. 2000, 43, 27–39. [Google Scholar] [CrossRef] [PubMed]
- Uwen, G.O. Interface between language and road traffic signs. Ebonyi J. Lang. Lit. Stud. 2019, 2, 1–11. [Google Scholar]
- Uwen, G.O.; Ebam, P.O. Road traffic signs’ literacy and the implications on road users in Calabar’. J. Read. Assoc. Niger. 2019, 18, 163–171. [Google Scholar]
- Stanciu, S.C.; Eby, D.W.; Molnar, L.J.; St Louis, R.M.; Zanier, N. Interpersonal communication and issues for autonomous vehicles. A: 2017, Report: ATLAS-2017-20.
- Färber, B. Communication and communication problems between autonomous vehicles and human drivers. In Autonomous Driving: Technical, Legal and Social Aspects; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2016; pp. 125–144. [Google Scholar]
- Lee, Y.M.; Madigan, R.; Giles, O.; Garach-Morcillo, L.; Markkula, G.; Fox, C.; Camara, F.; Rothmueller, M.; Vendelbo-Larsen, S.A.; Rasmussen, P.H.; et al. Road users rarely use explicit communication when interacting in today’s traffic: implications for automated vehicles. Cogn. Technol. Work. 2021, 23, 367–380. [Google Scholar]
- Renge, K. Effect of Driving Experience on Interpersonal Communication on Road. Tezukayama Univ. Bull. Lib. Arts 1992, 31, 415–435. [Google Scholar]
- Rehman, A.; Ali, S.; Manzoor, S.; Gulshan, M.T. Role of traffic signs & symbols as nonverbal communication in road accidents: a case of district Malakand. PalArch’s J. Archaeol. Egypt/Egyptol. 2021, 18, 860–876. [Google Scholar]
- Scott-Parker, B.; Jones, C.M.; Rune, K.; Tucker, J.A. qualitative exploration of driving stress and driving discourtesy. Accid. Anal. Prev. 2018, 118, 38–53. [Google Scholar] [CrossRef] [PubMed]
- ENCA. KZN records increase in road fatalities. 2021. Available online: https://www.enca.com/news/kzn-records-increase-road-fatalitie (accessed on 14 October 2021).
- Statistics South Africa. Road transport accident deaths on the increase in SA. 2024. Available online: https://www.statssa.gov.za/?p=17175 (accessed on 14 January 2021).
- Šimunović, L.; Ćosić, M.; Šojat, D.; Radulović, B.; Dijanić, D. Simulating Pedestrian Behaviour in School Zones–Possibilities and Challenges. In 5th International Academic Conference on Places and Technologies (pp. 586-592). 2018. [Google Scholar]
- PTV Group. PTV Vissim 2020 user manual. 2020, PTV Group: Karlsruhe, Germany, 1278.
- Kučera, T.; Chocholáč, J. Design of the city logistics simulation model using PTV VISSIM software. Transp. Res. Procedia 2021, 53, 258–265. [Google Scholar] [CrossRef]
- Shi, X.; Yang, S.; Ye, Z. Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior. Systems 2023, 11, 269. [Google Scholar] [CrossRef]
- Blender v2.49a. 2011. Available online: http://www.blender.org/ (accessed on 14 January 2021).
- Paz, A.; Veeramisti, N.; De La Fuente-Mella, H.; Modorcea, L.V.; Monteiro, H. Towards a realistic traffic and driving simulation using 3D rendering. In 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP) (pp. 351-356). 2015, September, IEEE.
- Pandis, N. The chi-square test. American journal of orthodontics and dentofacial orthopedics 2016, 150, 898–899. [Google Scholar] [CrossRef]
- Akple, M.S.; Sogbe, E.; Atombo, C. Evaluation of road traffic signs, markings and traffic rules compliance among drivers’ in Ghana. Case Stud. Transp. Policy 2020, 8, 1295–1306. [Google Scholar] [CrossRef]
- ICAO, 2012. International Civil Aviation Organization, Safety Management Manual (SMM), Doc 9859, AN/460, third ed.
- Aven, T. Risk assessment and risk management: Review of recent advances on their foundation. Eur. J. Oper. Res. 2016, 253, 1–13. [Google Scholar] [CrossRef]
- Skorupski, J. The simulation-fuzzy method of assessing the risk of air traffic accidents using the fuzzy risk matrix. Saf. Sci. 2016, 88, 76–87. [Google Scholar] [CrossRef]
- Skorupski, J. Fuzzy risk matrix as a tool for the analysis of the air traffic safety. In 26th Conf. Eur. Saf. Reliab. (ESREL) 2017, (pp. 2781-2788).
- Zaky, M.M. Risk analysis using fuzzy system based risk matrix methodology. Arab Journal of Nuclear Sciences and Applications, 2018, 51, 204–212. [Google Scholar] [CrossRef]
- Yang, L.; Feng, Z.; Zhao, X.; Jiang, K.; Huang, Z. Analysis of the factors affecting drivers’ queue-jumping behaviors in China. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 96–109. [Google Scholar] [CrossRef]
- Schlueter, D.A.; Austerschmidt, K.L.; Schulz, P.; Beblo, T.; Driessen, M.; Kreisel, S.; Toepper, M. Overestimation of on-road driving performance is associated with reduced driving safety in older drivers. Accident Analysis & Prevention, 2023, 187, 107086. [Google Scholar] [CrossRef] [PubMed]
- Boua, M.; Kouabenan, D.R.; Belhaj, A. Road safety behaviors: role of control beliefs and risk perception. Transp. Res. Part F Traffic Psychol. Behav. 2022, 91, 45–57. [Google Scholar] [CrossRef]
- Serna, C.G.; Ruichek, Y. Classification of traffic signs: The european dataset. IEEE Access 2018, 6, 78136–78148. [Google Scholar] [CrossRef]
- Hecht, H.; Ramdohr, M.; von Castell, C. Underestimation of large distances in active and passive locomotion. Exp. Brain Res. 2018, 236, 1603–1609. [Google Scholar] [CrossRef] [PubMed]
- Vaishnav, A.; Nishad, R.K. Automatic Dipping System for Vehicles Headlight. J. Mech. Enggineering 2015, 1. [Google Scholar]
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef]
- Liu, H.Y. Three types of structural discrimination introduced by autonomous vehicles. UC Davis L. Rev. Online 2017, 51, 149. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. Journal of advanced transportation, 2018. [Google Scholar]
- Pammer, K.; Gauld, C.; McKerral, A.; Reeves, C. “They have to be better than human drivers!” Motorcyclists’ and cyclists’ perceptions of autonomous vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2021; 78, 246–258. [Google Scholar] [CrossRef]
- Giannaros, A.; Karras, A.; Theodorakopoulos, L.; Karras, C.; Kranias, P.; Schizas, N.; Kalogeratos, G.; Tsolis, D. Autonomous vehicles: Sophisticated attacks, safety issues, challenges, open topics, blockchain, and future directions. J. Cybersecur. Priv. 2023, 3, 493–543. [Google Scholar] [CrossRef]
- Hou, M.; Mahadevan, K.; Somanath, S.; Sharlin, E.; Oehlberg, L. Autonomous vehicle-cyclist interaction: Peril and promise. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, 2020, April, (pp. 1-12).
- Morris, A.P.; Haworth, N.; Filtness, A.; Nguatem, D.P.A.; Brown, L.; Rakotonirainy, A.; Glaser, S. Autonomous vehicles and vulnerable road-users—important considerations and requirements based on crash data from two countries. Behav. Sci. 2021, 11, 101. [Google Scholar] [CrossRef]
- Tabone, W.; De Winter, J.; Ackermann, C.; Bärgman, J.; Baumann, M.; Deb, S.; Emmenegger, C.; Habibovic, A.; Hagenzieker, M.; Hancock, P.A.; et al. Vulnerable road users and the coming wave of automated vehicles: Expert perspectives. Transp. Res. Interdiscip. Perspect. 2021, 9, 100293. [Google Scholar] [CrossRef]
- Reyes-Muñoz, A.; Guerrero-Ibáñez, J. , Vulnerable road users and connected autonomous vehicles interaction: A survey. Sensors 2022, 22, 4614. [Google Scholar] [CrossRef] [PubMed]
- Berkey, B. How Should Autonomous Vehicles Redistribute the Risks of the Road? Whart. Public Policy Initiat. Issue Brief 2019, 7, 1–6. [Google Scholar]
- Petrovych, V.; Thellman, S.; Ziemke, T. Human interpretation of goal-directed autonomous car behavior. In Proceedings of the 40th annualcognitive science society meeting, Madison, Wisconsin, USA, 25–28 July 2018; Cognitive Science Society; pp. 2235–2240. [Google Scholar]
- Şahin, H.; Hemesath, S.; Boll, S. Deviant behavior of pedestrians: a risk gamble or just against automated vehicles? How about social control? Front. Robot. AI 2022, 9, 885319. [Google Scholar] [CrossRef] [PubMed]
- Yuen, K.F.; Wong, Y.D.; Ma, F.; Wang, X. The determinants of public acceptance of autonomous vehicles: An innovation diffusion perspective. J. Clean. Prod. 2020, 270, 121904. [Google Scholar] [CrossRef]
- Aoki, S.; Lin, C.W.; Rajkumar, R. Human-robot cooperation for autonomous vehicles and human drivers: Challenges and solutions. IEEE Commun. Mag. 2021, 59, 35–41. [Google Scholar] [CrossRef]
- Ahmed, H.U.; Huang, Y.; Lu, P.; Bridgelall, R. Technology developments and impacts of connected and autonomous vehicles: An overview. Smart Cities 2022, 5, 382–404. [Google Scholar] [CrossRef]
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and automated vehicles: Infrastructure, applications, security, critical challenges, and future aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, H.; Zhang, J.; Cao, D. Lane-exchanging driving strategy for autonomous vehicle via trajectory prediction and model predictive control. Chin. J. Mech. Eng. 2022, 35, 71. [Google Scholar] [CrossRef]
- Zhanguzhinova, S.; Mako, E.; Borsos, A.; Sándor, Á.P.; Koren, C. Communication between autonomous vehicles and pedestrians: an experimental study using virtual reality. Sensors 2023, 23, 1049. [Google Scholar] [CrossRef]
- Tran, T.T.M.; Parker, C.; Hoggenmuller, M.; Wang, Y.; Tomitsch, M. Exploring the Impact of Interconnected External Interfaces in Autonomous Vehicleson Pedestrian Safety and Experience. arXiv arXiv:2403.05725, 2024.
- Roussou, S.; Garefalakis, T.; Michelaraki, E.; Brijs, T.; Yannis, G. Machine Learning Insights on Driving Behaviour Dynamics among Germany, Belgium, and UK Drivers. Sustainability 2024, 16, 518. [Google Scholar] [CrossRef]
Figure 1.
Video Design using PTV Vissim and Blender Software.
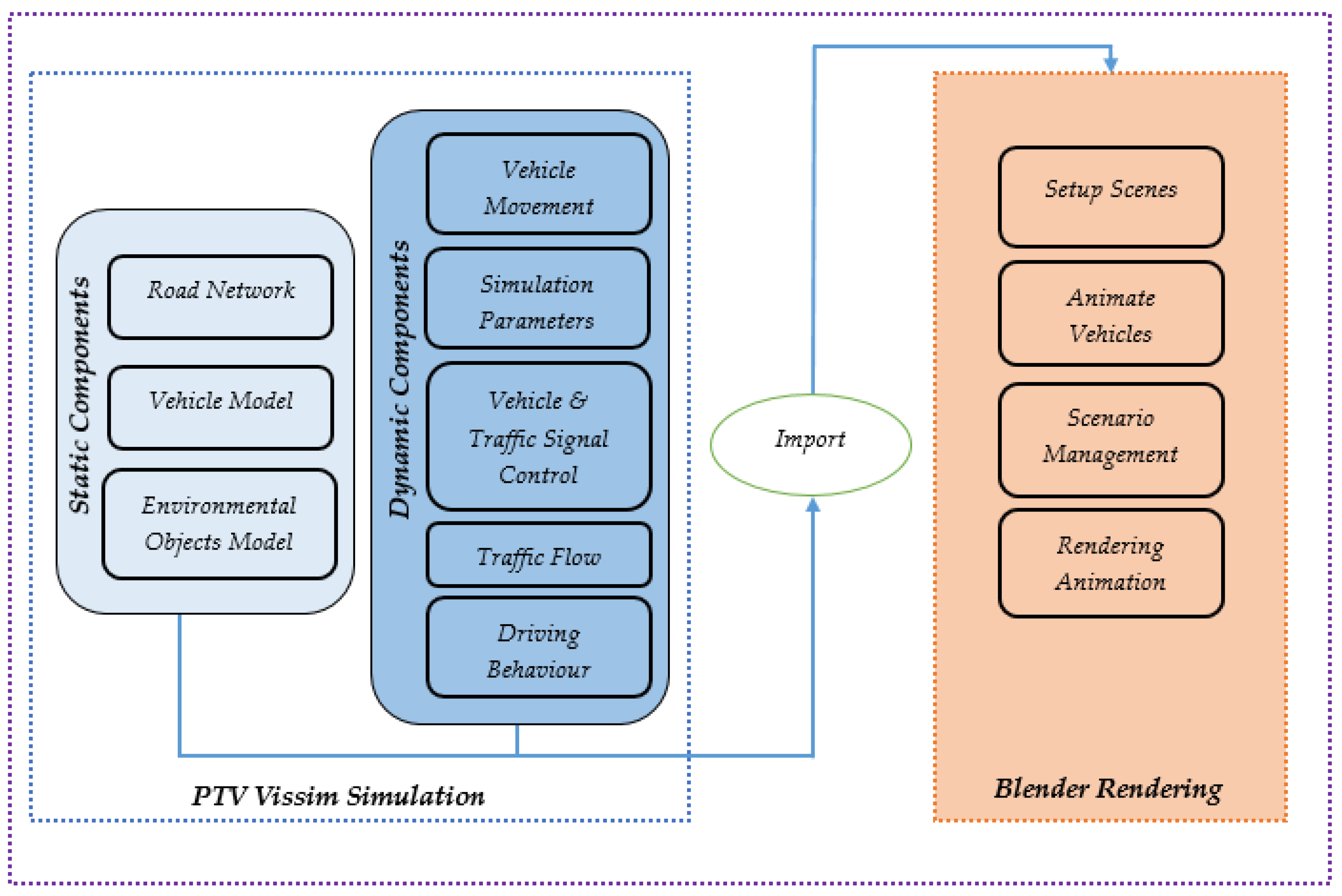
Figure 2.
Self-rating of respondent responses to communication on roads.
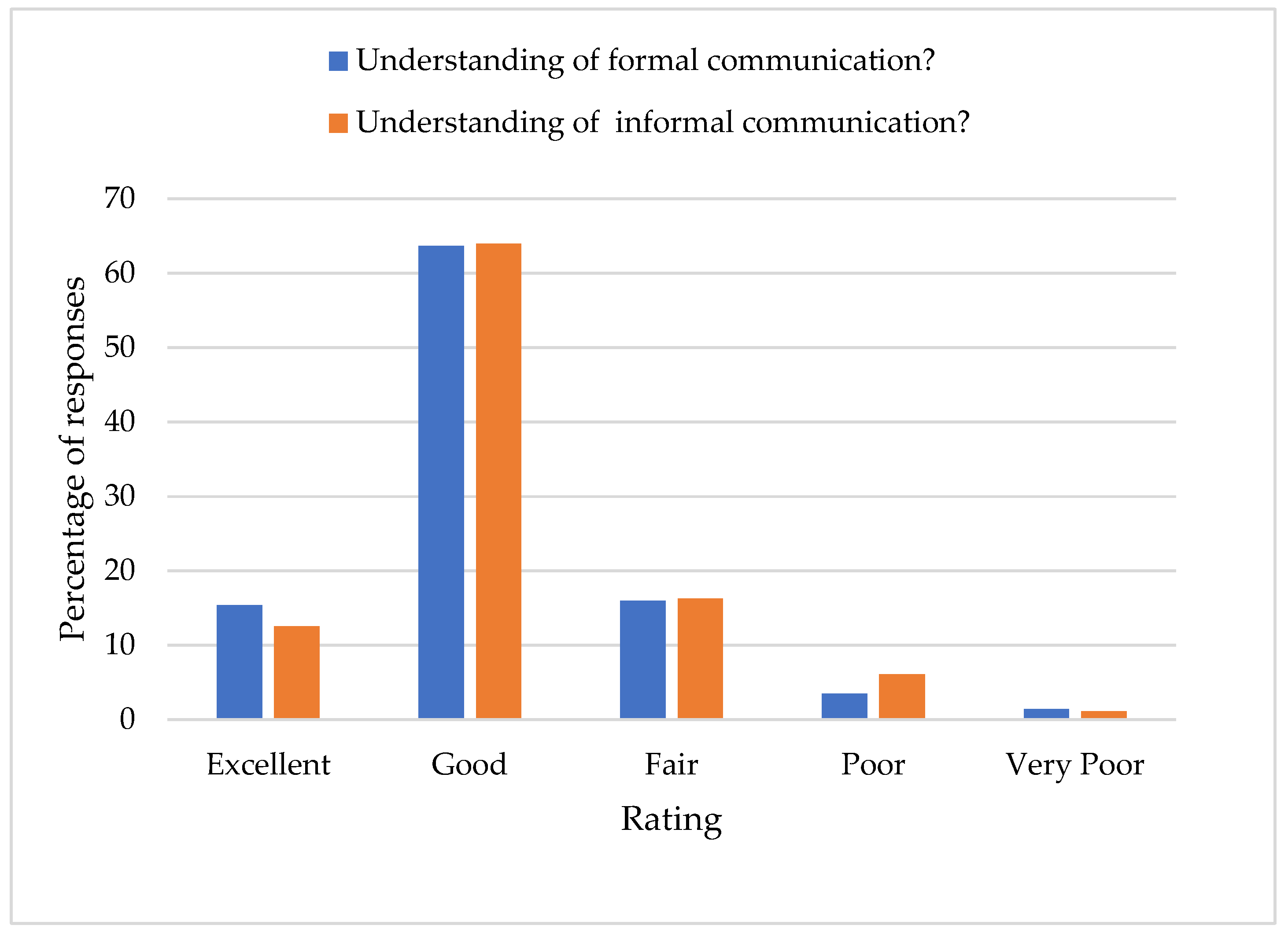
Figure 3.
Correct answer rates by stimuli and by respondent driving experience.
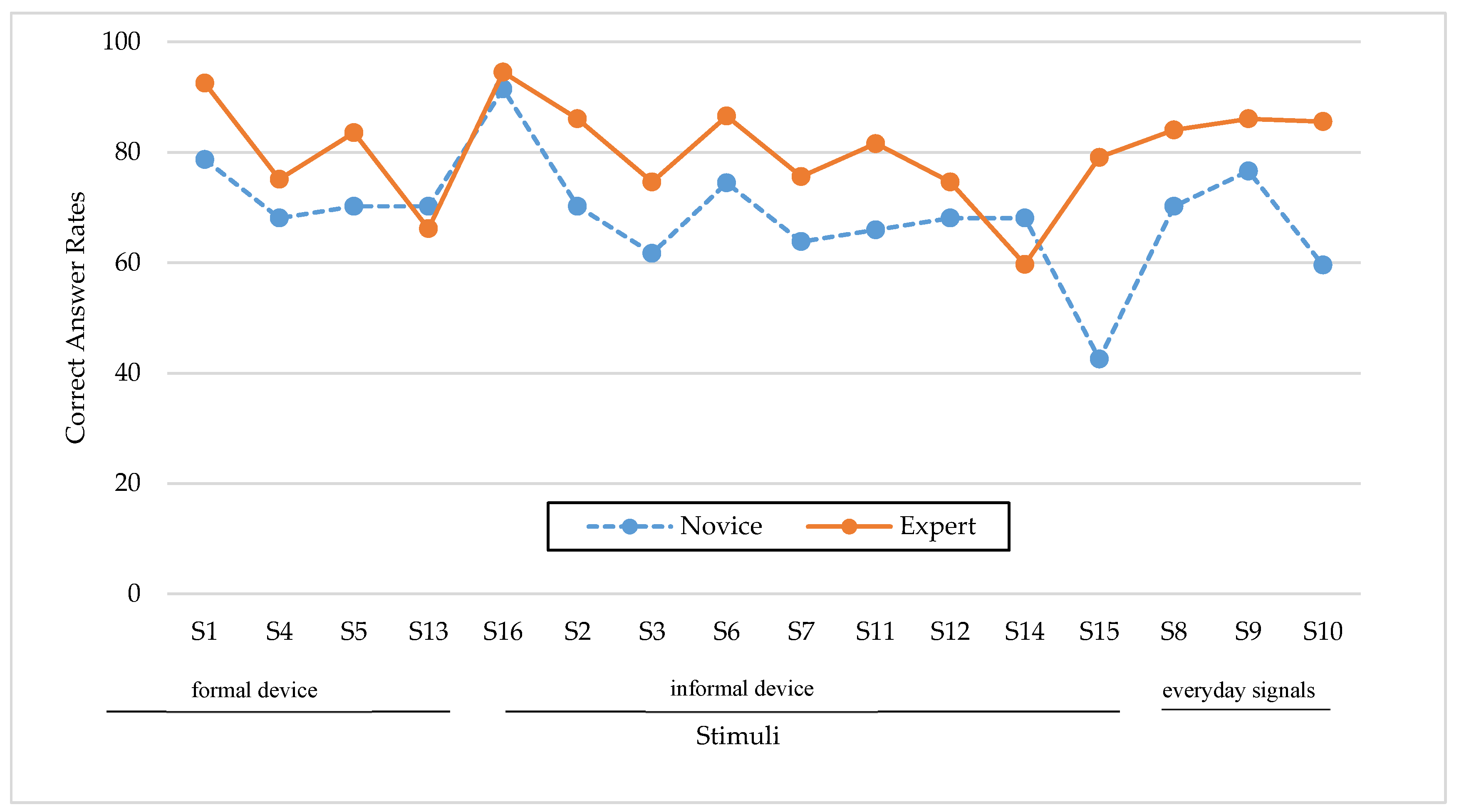
Figure 4.
Stimuli with significant differences in correct answer rates between respondents.
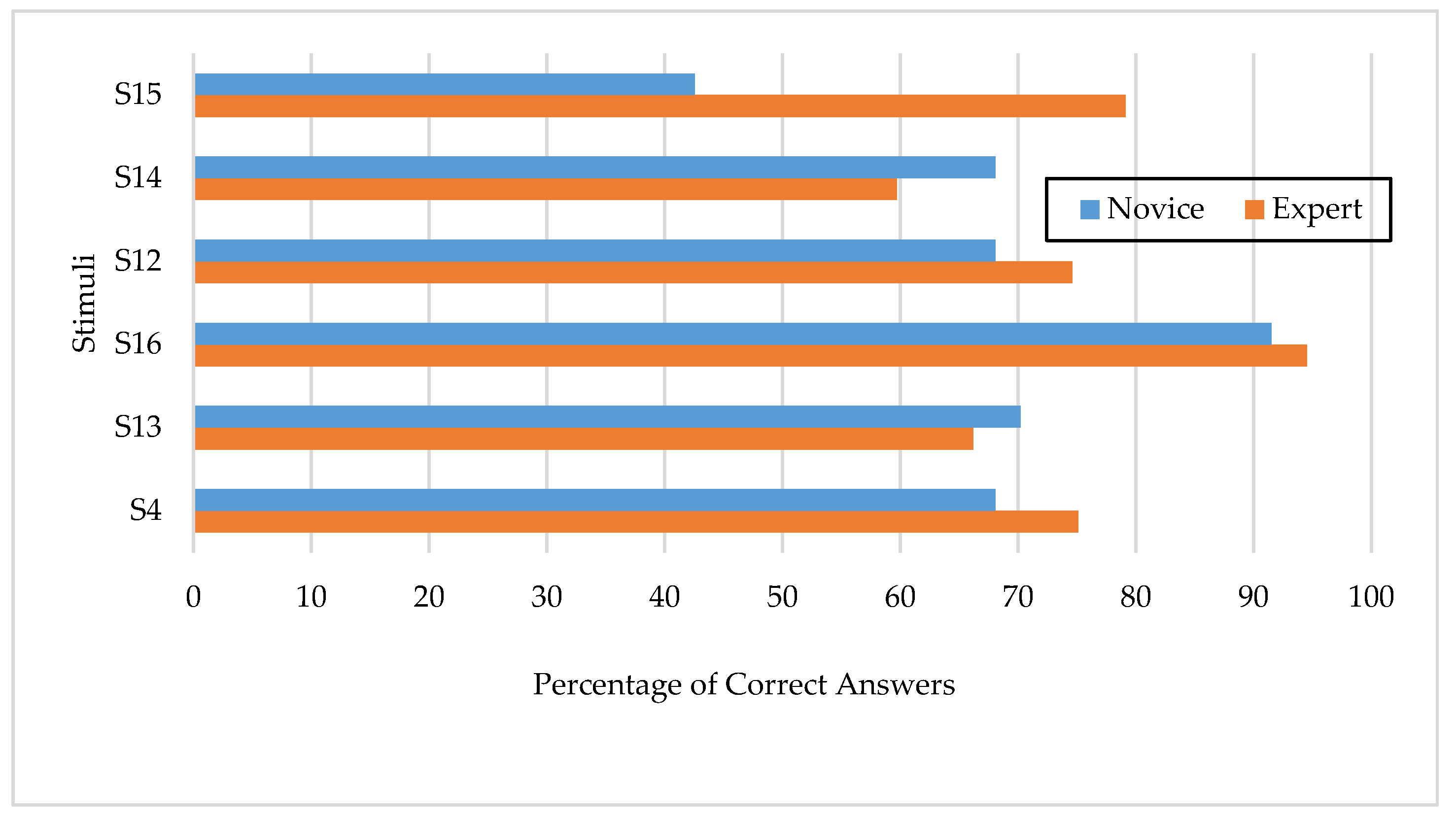
Figure 5.
Means of confidence of answers by stimuli and by respondent groups.

Figure 6.
Stimuli with significant differences in correct answer rates between respondents.
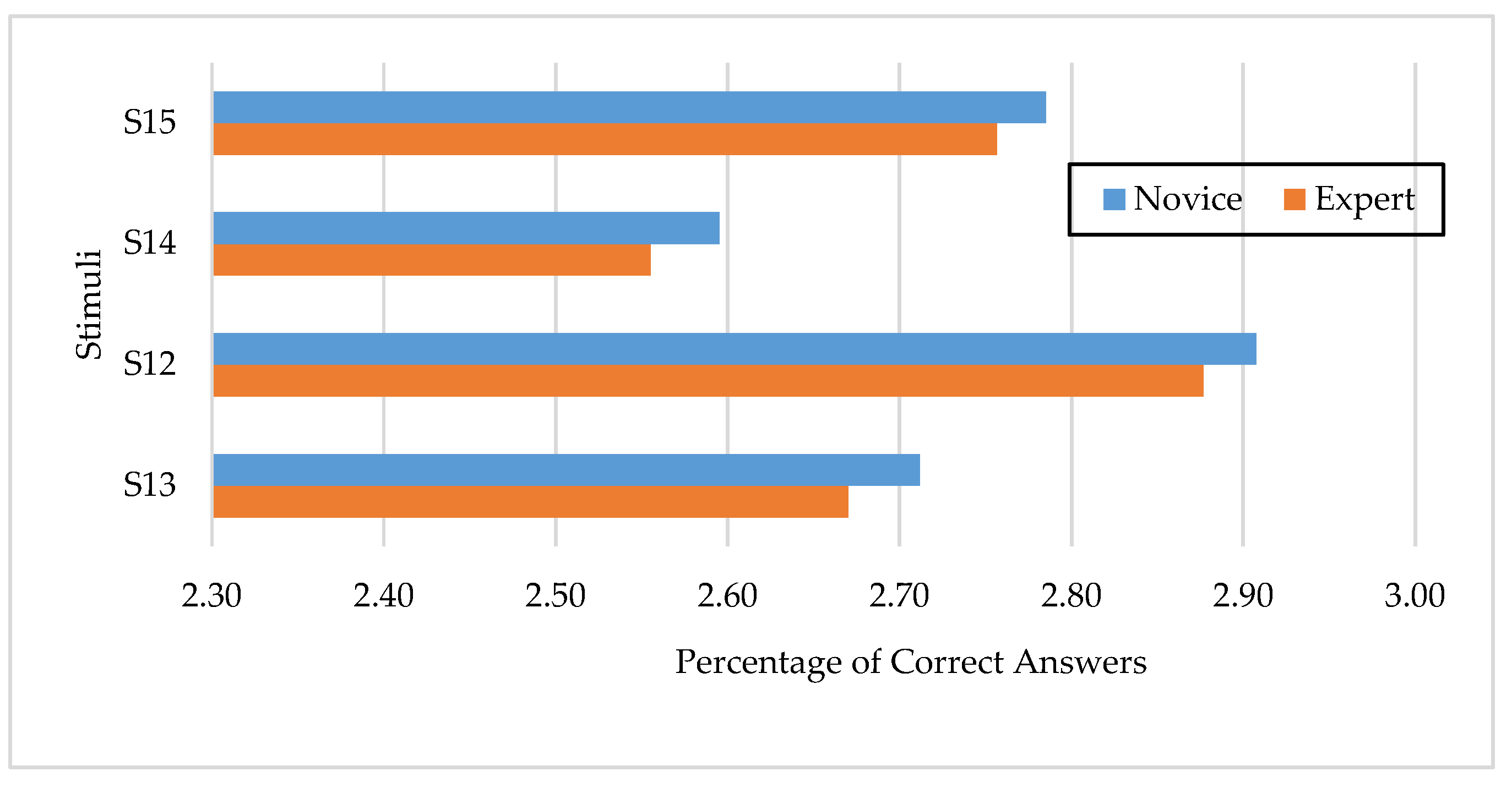
Table 1.
Demographics of the respondents (N=381).
| Characteristic | Group | Percentage | Characteristic | Group | Percentage |
|---|---|---|---|---|---|
| Age | 18 – 24 | 52 | Years of driving Experience | 0 - 2 | 4.7 |
| 25 – 34 | 24 | 3 - 5 | 6.2 | ||
| 34 – 44 | 14 | 6 - 10 | 33.7 | ||
| 45 – 54 | 6 | 10 - 20 | 40.9 | ||
| 55 or older | 4 | Over 20 | 1.5 | ||
| Gender | Male | 77 | Road Users | Driver | 63 |
| Female | 23 | Passengers | 37 | ||
| Education | Grade 4 -– 6 1 | 4 | Traffic fines in the past year | 0 | 38 |
| Grade 7-12 2 | 38 | 1 - 3 | 42 | ||
| Undergraduate | 46 | 4 - 6 | 17 | ||
| Postgraduate | 12 | 7 above | 2 | ||
| Driver category | Commerical | 68.6 | Possess a drive licence | Yes | 72.1 |
| Private | 31.4 | No | 27.9 |
1 Grade 4-6 (South Africa Basic Education - Intermediate Phase) 2 Grade 7-12 (South Africa Basic Education - The Senior Phase).
Table 2.
Meanings and channels of the signals used in the experiment.
| S/N | Stimuli (signals and traffic situations) | Meaning | Classification | Channel | Formal/Informal | Type of signals |
|---|---|---|---|---|---|---|
| S1 | Red flag by a person for traffic control | Strong Command | Danger/Warning | Flag | Formal | 1 (formal device) |
| S2 | Blinking of headligh of vehicle “you are welcome” | Social Etiquette | Information | Headlights | Informal | 2 (informal device) |
| S3 | Blinking of headlight of vehicle to another vehicle indicating “not happy with your driving” | Strong Command | Danger/Warning | Headlights | Informal | 2 (informal device) |
| S4 | Blinker of a car indicating right to overtake | Intentional/Demostration | Regulatory | Blinker | Formal | 1 (formal device) |
| S5 | Blinker of a car turning left | Intentional/Demostration | Regulatory | Blinker | Formal | 1 (formal device) |
| S6 | Blinking headlight of a car “given right of way” to another car | Social Etiquette | Regulatory | Headlights | Informal | 2 (informal device) |
| S7 | Hazard lamps of car saying “Thanks” | Social Etiquette | Information | Hazard lamps | Informal | 2 (informal device) |
| S8 | Hand gesture of a car stopping | Weak Command | Regulatory | Gesture | Formal | 3 (formal gesture) |
| S9 | Hand gesture of a car turning right | Weak Command | Regulatory | Gesture | Formal | 3 (formal gesture) |
| S10 | Hand gesture of a car turning left | Weak Command | Regulatory | Gesture | Formal | 3 (formal gesture) |
| S11 | Blinker of a truck indicating right implying “it is safe to overtake” | Intentional/Demostration | Regulatory | Blinker | Informal | 2 (informal device) |
| S12 | Blinking of headlights of a car to another car running slowly | Strong Command | Danger/Warning | Headlights | Informal | 2 (informal device) |
| S13 | Blinker of a car turning left to off ramp | Intentional/Demostration | Regulatory | Blinker | Formal | 1 (formal device) |
| S14 | Hazard lamps of a stopping car roadside | Behavioural Demostration | Information | Hazard lamps | Informal | 2 (informal device) |
| S15 | Blinking of headlights of a car to another car on the other lane to commicate “hazard ahead” | Emphases/Notices | Danger/Warning | Headlights | Informal | 2 (informal device) |
| S16 | Blinker of a car turning right | Intentional/Demostration | Regulatory | Blinker | Formal | 1 (formal device) |
Table 3.
Chi-square analysis results for respondents’ answers to questions about stimuli and driving experience (N=381).
Table 3.
Chi-square analysis results for respondents’ answers to questions about stimuli and driving experience (N=381).
| Chi-Square | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 |
|---|---|---|---|---|---|---|---|---|
| 8.0193 | 6.8087 | 3.1687 | 0.9760 | 4.4327 | 4.2076 | 2.7121 | 4.8463 | |
| p value | 0.0046 | 0.0091 | 0.0751 | 0.3232 | 0.3525 | 0.0402 | 0.9958 | 0.0276 |
| S/N | S9 | S10 | S11 | S12 | S13 | S14 | S15 | S16 |
| 2.5798 | 16.4947 | 5.5413 | 0.8347 | 0.2814 | 1.1285 | 25.3425 | 0.6187 | |
| p value | 0.1082 | 0.00005 | 0.0186 | 0.3609 | 0.5757 | 0.2881 | <0.00001 | 0.4315 |
Table 4.
Traffic Safety Risk Analysis Matrix.
| Level of Confidence | Likelihood of Occurrence | |||||
| 1 (Low) | 2 | 3 (Neutral) | 4 | 5 (High) | ||
| 1 (High Confidence) | Low Risk | Low Risk | Low Risk | Moderate Risk | High Risk | |
| 2 (Moderate Confidence) | Low Risk | Low Risk | Moderate Risk | High Risk | High Risk | |
| 3 (Neutral) | Low Risk | Moderate Risk | Moderate Risk | High Risk | High Risk | |
| 4 (Low Confidence) | Moderate Risk | High Risk | High Risk | High Risk | Very High Risk | |
| 5 (Very Low Confidence) | Very Low Risk | High Risk | High Risk | Very High Risk | Very High Risk | |
Table 5.
Classification of communications and risk analysis results for reponses.
| Question | Correct Responses % | Formal (F) or Informal (IF) | Occurrences % | Confident level | Risk Analysis | Video Link | ||
|---|---|---|---|---|---|---|---|---|
| High | Neutral | Low | ||||||
| Red flag by a person for traffic control | 91 | 92 (F) | 44 | 91 | 6 | 3 | Moderate-Low | https://youtu.be/abrXy5DEWIM |
| Blinking of headligh of vehicle “you are welcome” | 76 | 52 (IF) | 81 | 84 | 8 | 8 | High | https://youtu.be/7zdC1RV-GjI |
| Blinking of headlight of vehicle to another vehicle indicating “not happy with your driving” | 88 | 32 (IF) | 79 | 87 | 10 | 3 | Moderate-High | https://youtu.be/L8leSDomeL |
| Blinker of a car indicating right to overtake | 80 | 82 (F) | 84 | 89 | 8 | 3 | High | https://youtu.be/L8leSDomeL |
| Blinker of a car turning left | 95 | 99 (F) | 97 | 97 | 2 | 1 | Moderate | https://youtu.be/dOkDM4kzd9I |
| Blinking headlight of a car “given right of way” to another car | 99 | 36(IF) | 62 | 90 | 7 | 3 | Moderate-High | https://youtu.be/J_4FB6kOpzE |
| Hazard lamps of car saying “Thanks” | 90 | 50 (IF) | 81 | 87 | 9 | 4 | Moderate | https://youtu.be/gRINcqabf30 |
| Hand gesture of a car stopping | 88 | 82 (F) | 33 | 85 | 8 | 7 | Low-Moderate | https://youtu.be/I0NQL4pwXrU |
| Hand gesture of a car turning right | 65 | 79 (F) | 28 | 79 | 9 | 12 | Moderate | https://youtu.be/u4nq2jlEUPE |
| Hand gesture of a car turning left | 60 | 78 (F) | 32 | 75 | 10 | 15 | Moderate | https://youtu.be/v3wwdg4JuUM |
| Blinker of a truck indicating right implying “it is safe to overtake” | 95 | 43 (IF) | 78 | 88 | 10 | 2 | Moderate-High | https://youtu.be/gRINcqabf30 |
| Blinking of headlights of a car to another car running slowly | 78 | 26 (IF) | 85 | 90 | 8 | 2 | Moderate | https://youtu.be/eYqrp6tXgac |
| Blinker of a car turning left to off ramp | 83 | 89(F) | 84 | 84 | 10 | 6 | Moderate-High | https://youtu.be/fmrOuHhCM4s |
| Hazard lamps of a stopping car roadside | 96 | 7(IF) | 53 | 96 | 3 | 1 | Low-Moderate | https://youtu.be/pFgW5Ex-LtI |
| Blinking of headlights of a car to another car on the other lane to commicate “hazard ahead” | 93 | 40(IF) | 47 | 90 | 5 | 5 | Moderate-High | https://youtu.be/dN0IbMDKz9s |
| Blinker of a car turning right | 98 | 92(F) | 88 | 92 | 5 | 3 | Moderate | https://youtu.be/wfBtHHNcb-M |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



