
Submitted:
04 June 2024
Posted:
04 June 2024
You are already at the latest version
Abstract
With the advancing energy transition, ice is a growing problem in wind turbine sector. The development of systems to detect and mitigate icing makes it necessary to understand its basic behavior and characteristics. This paper proposes a method for the continuous and full field measurement of the icing process of rotating blades, using a single line laser profile scanner. Inside of a climate chamber, a rotor is driven by a motor, while a system of nozzles provides a fine water dust, which leads to ice accumulating on simple NACA blades, that in turn is measured by a triangulation laser. The measurement data is cleared from outliers and presented as a surface in 3D space. An alpha shape is used to reconstruct and extract the volume of the ice between a reference and a measurement surface, using the corresponding Matlab function. Appropriate input parameters for the function and offsetting of the reference surface to improve the results are compared and discussed. The resulting system is able to detect thin changes in the ice layer in the range of sub millimeter thickness.
Keywords:
icing measurement
; airfoils
; volume reconstruction
; ice volume
; alpha shape
1. Introduction
Icing is a common problem encountered in many fields of engineering. Wind turbine applications are one of them and with a globally expanding use of wind energy, its importance will rise over the next years [1]. Their high circumferential velocities make wind turbine blades prone to icing well before the rest of the structure [2]. The consequences of this are manifold and range from shortened life spans of shafts or bearings, over financial losses, due to reduced power output from lower aerodynamic efficiency, up to high risk safety hazards from falling or thrown chunks of ice [1,3,4,5,6]. The topic of icing is subject to standards like the ISO 12494 [7], that covers the general behavior and properties of ice, and the DNV-GL RO-0175, which is specifically addressing wind turbines [8].
The first step to develop systems that can detect icing or mitigate its effects, is lab-scale research that allows to study the effects of the ice itself or the effectiveness of systems for its detection or inhibition in a controlled environment. To correlate the effects to the icing, detailed information about its nature and distribution is necessary. Much work has been done to study the ice accretion on on airfoil structures both, rotating and stationary, on full scale as well as small scale models. However, so far the main focus lies on the cross sectional shapes of the leading edge ice. Continuous and full field monitoring of ice accumulation along the whole surface of the blade during an icing event did not get much attention so far, to the authors best knowledge.
Drapalijk et al. studied the ice accretion on small wind turbines in operation, with a blade length of up to 4 m, using cameras at different angles and approximating the ice as a tetrahedral volume, while using the known blade length as calibration reference [9]. Experiments with a stationary blade section in an icing tunnel were carried out by Jin et al. [10], Hudecz et al. [11] and Hochart et al. [12]. While the advancing ice growth was recorded by Jin et al., using several cameras, the final results again focused on the cross sectional leading edge structure of the ice. Han et al. performed ice accretion experiments on rotating small scale wind turbine blades to validate prediction models for rime icing at the leading edge, thus focusing on the cross sectional shape of the ice [13]. The guideline RP-0175 on the icing of wind turbines of the certification society DNV GL suggests a formula for the ice mass distribution along a wind turbine blade for load modeling purposes, but again, the ice is vaguely assumed to be concentrated at the leading edge or the leading 30 % of the blade surface [8].
Gantasala et al. investigated the effects of ice mass distributed along the blade of a small 1 kW wind turbine and trained a neural network to estimate the ice mass in three different zones, using the natural frequencies as an input, but the ice was placed manually on the blade [14]. A system that combines a natural ice accumulation with the possibility to measure its distribution could be able to improve the validity of the results from such measurements.
Filippatos et al. proposed a test rig to measure the structural dynamic behavior of a rotating disc-rotor under icing conditions [15]. The experiments were conducted at a blade icing (BLICE) test rig, specially designed for this purpose. Water, sprayed from a nozzle system, leads to ice accumulating on the rotor. A laser scanner measured the ice on a radial line across the rotor. From the comparison of an ice free baseline and an iced measurement, the ice thickness and distribution on the rotor had been derived with high precision. For the work, presented in this paper, the same BLICE test rig was used, but with a new designed bladed rotor, both in order to receive a 3D representation of the (iced) rotor blades and to compute the volume of the ice layers on the rotor blades.
The main challenges in the data processing and analysis are the transition to a non homogeneous rotational symmetry and icing behavior of the rotor, which means that the ice growth can no longer be reduced to an averaged 2D representation of its cross section. Instead it requires a three dimensional representation of the surface data, and the reconstruction of a volume that envelops the point data measured by the laser scanner. The latter can be achieved by using the mathematical tool of an "alpha shape". While not originally designed for the purpose of surface or volume reconstruction, it has already been used for this in a variety of applications [16,17,18,19,20]. The general concept is explained in more detail in Chapter 2.5.
Measurements were conducted to evaluate the results of the presented methods and data processing algorithms.
2. Materials and Methods
In the following, the design of the specimens and the components of the test rig used in the research for this paper are described. The main focus lies on the parts that are relevant for the induction of a natural icing process of the rotating specimens and the measurement of the ice layer.
2.1. Specimens
The specimens, named Blade I and Blade II, are designed to follow a representative geometry of wind turbine blades and are manufactured in a vacuum assisted resin infusion process. They consist of two separate shells that are glued together using the structural adhesive DP 490. A NACA 0018 resembles the relative thickness of the lower to middle part of wind turbine blades. The dimensions of the specimens are defined by the space available in the test rig. To give them a slim shape at the given length of 200 mm, an airfoil depth of 50 mm was chosen. The thickness was also considered in this decision because the absolute thickness decreases with smaller depths but a certain amount of space was required to mount actuators and sensors inside the blades. The shells of the specimens consist of a four layered stack of unidirectional glass fibres with angles in 0 and ±45° direction that are infused with the wind turbine certified epoxy resin hardener mixture RIMR 135, RIMR 137. At the root of the specimen a 3D printed Greentec Pro (Extrudr) adaptor is glued to attach them to the flange in the test rig. The tip is sealed by an also 3D printed lid that prevents water intrusion into the blades and carries an acceleration sensor for vibration measurements. The sensor equipment on the specimens is not relevant for the topic of this paper and therefore not further explained. Figure 1 shows all components and the dimensions of the specimen.
2.2. Test Rig Set-Up
The complete set-up of the test rig in detail is presented in [15]. Here the focus lies on the relevant parts for the icing and laser profile scanning system.
Figure 2.
Sketch (left) and front view (right) of the test rig.
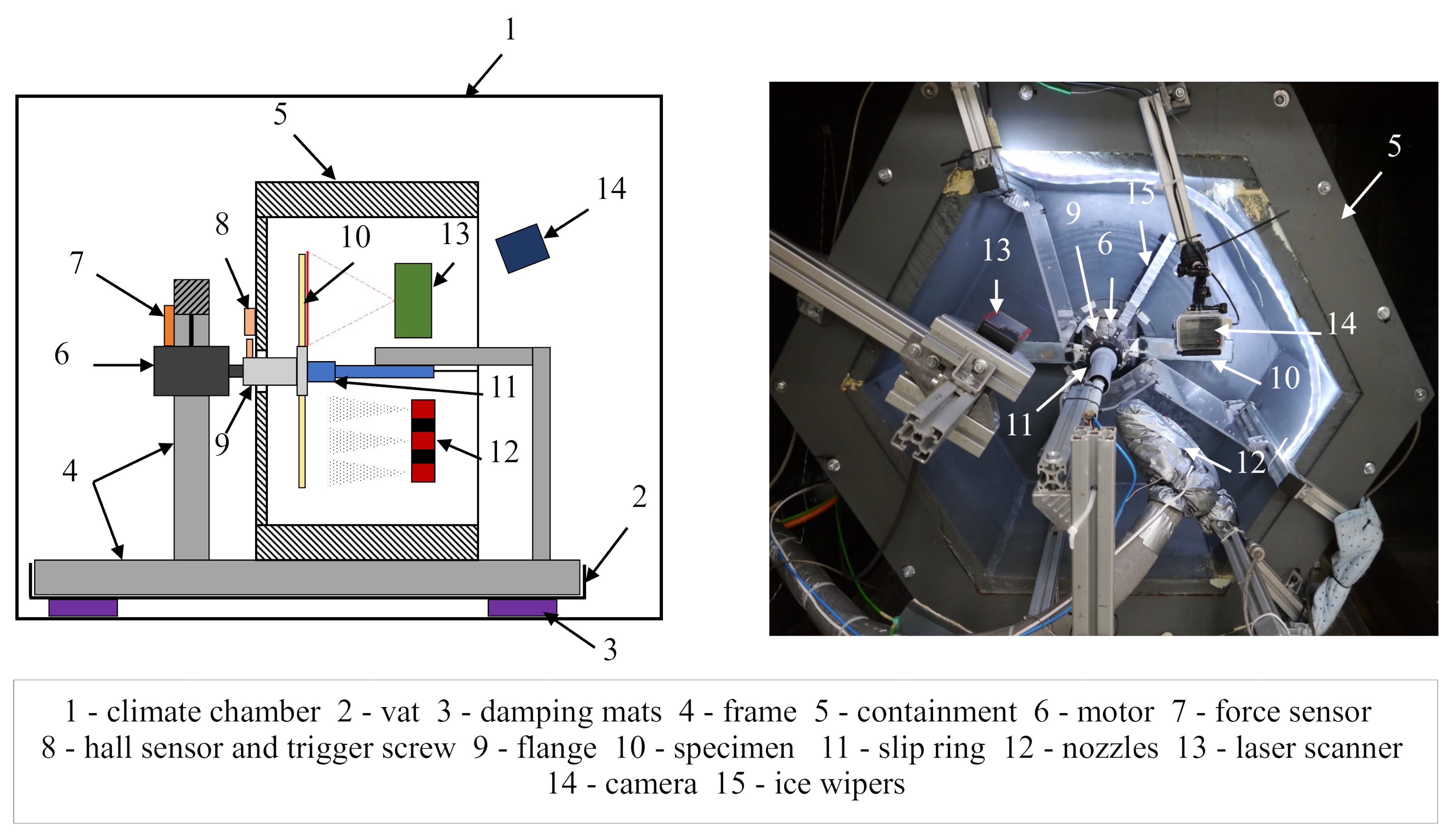
The test rig is situated inside a climate chamber (1) to have control over the temperature conditions. Specimens can be mounted on the flange of a motor (9) and rotated at various velocities by a Kollmorgen AKM52L servomotor (6). Its speed can be set by an analog voltage signal that is fed to the corresponding Kollmorgen S712 frequency inverter that controls the motor.
A system of three nozzles (12) perpendicular to the rotation plane allows the icing of the specimens at different radial positions. The water spraying process was performed continually, even during the measurements, to prevent the nozzles from freezing. The mass flow through the nozzles was manually controlled by adjusting their spray heads to values ranging from 3.5 to 4.5 . The value was increased from the inner to the outer nozzle to counter the higher circumferential velocity with growing radius that leads to less ice accumulated for the same mass flow of water. The nozzles were operated at the lower end of their mass flow spectrum to create a very fine mist of water, which made them susceptible to the stress of the high temperature gradients and led to frequent changes in the spraying properties. The nozzle setup is expressed by a binary vector whose values from left to right correspond to the nozzles from the inside to the outside and with a value of 1 meaning they are active. Figure 3 shows the resulting icing for each nozzle operating separately. The main icing areas are clearly visible.
The laser scanner (13), a Keyence LJ-V7300, provides information about the distance of an object that is crossing its measurement line by triangulation. It was developed for industrial high speed scanning applications like orientation detection, quality assessment or 3D-inspections. The device is oriented perpendicular to the rotation plane, but small deviations are negligible, because the calculation of the icing volume is based on the differences between the profiles of two measurements, therefor the absolute values do not matter. However, the alignment of the laser scanning line with the centre of the rotation is much more important to achieve correct results. The scanner is triggered to start and stop by a hall sensor (8) that detects a change in the magnetic field induced by a screw in the flange when passing by. The optical nature of the measurement method makes it best suited for opaque structures. There exist different types of ice that evolve under specific conditions for parameters like drop size, temperature and relative velocity on impact [7]. With its glossy form, clear ice, that occurs at temperatures close to 0 °C, can lead to high refraction of the laser beam and cause trouble in its detection.
An important point to consider with this and similar measurement techniques is the decreasing circumferential resolution with increasing radius . This is linked directly to the angular resolution that can be controlled with the number of single line measurements that are performed within one full rotation. The angular resolution therefore should be determined by the required resolution at the outermost part of the rotor:
2.3. Measurements and Data Organisation
The laser scanner distance data is collected rotation wise in the form of the distance between the surface of the measured object and the scanner sensor. Each rotation is stored as a m × n matrix Z, where each row contains one scanned line while the columns represent the radial position as evenly spaced points along the laser line as depicted in Figure 4. This means the data is originally stored in a semi-polar coordinate system. Over the course of a measurement, every second rotation is recorded. Depending on the measurement duration T and the rotational velocity , this leads to a maximum number of single rotation arrays:
These are stored in a txt-file format and later imported into Matlab, where they are concatenated to a three dimensional array for further processing. Some arrays were omitted during the import, when they were found unsuitable, so the actual number of used arrays can vary for each measurement.
2.4. Preprocessing and Presentation of the Ice Distribution
All processing code was written in Matlab for an easy adaption of the algorithm and due to the availability of several useful functions for this project. An overview of the main steps of the preprocessing is given in Figure 5.
First, the values where the laser is measuring into the void are replaced with ’NaN’ to segregate them clearly from the actual data. Furthermore, auxiliary elements of the rotor are removed in this step. After that, each single rotation array is scanned for big coherent data blocks, utilising the function "bwconncomp" from the Matlab Image Processing Toolbox. This step is necessary to detect and remove data sets that contain more than one rotation, when the laser scanner does not catch the signal from the trigger to stop the measurement. Then, the remaining arrays of the current measurement are concatenated into the third dimension where each page stores the data of one full rotation. The number of valid entries for each point during the measurement is counted along the third dimension of the array to remove random noise in the form of small bits of data that is disconnected from the blades. Furthermore, measurements that are heavily shifted against the majority of the data are detected and omitted, by evaluating the overlap of the locations of the data entries in the arrays of the measurements. Then the average blade profile is determined, using the median along the third dimension of the remaining data array to reduce the influence of outliers.
The laser scanner inherently delivers the data in a semi-polar coordinate system, where the information about radius and angle are contained in the indices of the column and the row of each entry. The radial resolution was 0.3 mm with values of the raw data running from -120 mm to 120 mm. The angular resolution is given by the number of m lines that are obtained within each rotation. A transformation into a Cartesian coordinate system is necessary for the further processing and makes the handling and displaying of the data much easier. Therefor two additional matrices X and Y of the same dimension as Z are needed to provide the x and y coordinates of the measurement points. In this step, the relative positioning of the laser and the rotor blades must be considered with a calibration value that is determined by mounting a small plate upright on a rotor blade, which creates a sharp peak in the laser scanner data, Figure 6. The difference between the measured peak and its real distance from the centre of rotation yields the calibration value C. The entries of the matrices X and Y are calculated with the following equations in which represents the row index, m the total number of rows and the column index. The assignment of the sine and cosine operations to the matrices can be chosen arbitrarily, this only affects the orientation of the resulting coordinate system.
After the calculation of the x and y coordinates, the single blade profile data can be extracted from the matrix without losing information. To achieve a standardized orientation for later calculations, the single blade data is shifted to the origin of the coordinate system and its root edge is aligned with the y-axis. This compensates for possible deviations in the position of the blades due to slight variations in the trigger of the laser measurement.
Now the measurement data must be cleared from remaining measurement errors because outliers in the point cloud can heavily influence the later computation of the volume, particularly for thin ice layers with a small overall volume. A several layered process of outlier detection and removal is deployed, which combines global and local approaches as depicted in Figure 7, using their individual advantages to compensate for the disadvantages of each other. The local approach evaluates the value of a point against its vicinity, which takes local effects into consideration, e.g. the given shape of the blades or ice accumulation. However, it is not useful when there are many outliers in a small area, because they "hide" each other when their values are of same magnitude. A global approach is less sensitive to such effects, but can be too coarse to reliably detect all outliers and, in this specific case, is biased to the blades root because the radially decreasing resolution means that more data points are collected there.
As a global technique, the Matlab function "isoutlier" is used to filter for the most obvious overall outliers. In this case, the quartile method is best suited to define incorrect values because the data is not normally distributed which can be seen in the histogram for an iced blade in Figure 8. It defines upper and lower thresholds and for the data based on the inter quartile range, which is the distance between the median of the lower half of the sorted samples to the median of the upper half of the samples:
The local approach compares each data point to its surroundings, and was realized as a custom written function1. For each point in the input array, the average is calculated within a specified window around the current point, that slides over the array and adapts to its the borders, as depicted in Figure 9. The absolute differences between the original and the averaged points are evaluated, using different thresholds, that were estimated based on the maximum slopes of the ice free blade geometry, the used window size and some inspection of the data.
In a first step, the global approach is used to filter for the most obvious outliers and exclude them from the following local evaluations. To reduce the number of false detection, as discussed earlier, the result is double checked with the local technique but using a big window size (21x21) and a high threshold of . All data points below the threshold are removed from the outlier pool again. The second step consists solely of the local approach, but with a smaller window size of 11x11. Outliers are now defined as points with a higher absolute difference to their corresponding average of . Last, the window is reduced to the immediate vicinity of the points (3x3) and the threshold is lowered to . Found outliers are omitted in the averaging process, therefore the average can change each time the method is applied, thus the process is looped until no new outliers are found. Small bits of data (less than 10 samples) that gets disconnected from the main block during the process are also labeled as outliers, because they lack trusted points around them to compare them with. When the detection process is finished, the outliers are replaced with linearly interpolated values. The Matlab function "fillmissing" is applied row and column wise to consider the properties of the specimens in longitudinal and transversal direction. End values are not extrapolated because this can quickly lead to escalating distortions in the data when there are several missing values in a row. To give additional weight to the direct surrounding, a smoothed data set with a window size of 3x3 is used as well. The filling process is looped two times because the independent use of the row and column wise filling can lead to the closing of gaps that were treated as end values and therefor not replaced the first time.
2.5. Ice Volume Reconstruction Using MATLAB Alpha Shape Function
The calculation of the ice volume requires the construction of a closed shape around a cloud of measured data points in 3D space, as depicted in Figure 10 for the iced middle part of a blade. The thickness of the ice layer (red) varies across the blade, up to a maximum value of approximately 10 mm. Together with the reference profile (blue) the volume of interest is encapsulated. To extract the volume information from the point clouds, an alpha shape is created, which is a more general concept of the convex hull of a set of points P. Using the parameter = [0,inf] a polytope is generated, whose facet size is dependent on the inverse of . It can be imagined as the radius of an "eraser" that removes connections of the polytope where it can fit without enclosing a point of P [22]. Another intuitive approach is the tightness of the fitting boundary that envelops the point cloud. The correspondent alpha shape to = inf is the convex hull of P. With a decreasing , the tightness of the fit of the enclosing shape is increased, until it ultimately contains only the points of P at = 0.
Between these two extrema there exist many different alpha shapes as illustrated exemplary in Figure 11. To use this mathematical construct as a tool for surface recreation requires to carefully select the alpha parameter and process the data. The main steps are described in this chapter as well as the used configurations for this special case, but they can be adapted to fit different kinds of application.
Matlab provides an in-built function to compute an alpha shape object from point cloud data. If no specified radius is given to the function, it will determine it as the minimum radius that is necessary to envelop all points. However, this does not necessarily guarantee that the resulting shape forms a closed volume around all points and is free from holes or interior surfaces. Depending on the sampling density a value slightly higher than should be chosen. This can also help to suppress the creation of boundary facets that cut through the volume. In the case of irregularly distributed data points must be selected carefully to suppress holes while keeping as many small details in the resulting shape as possible (see Figure 12).
Due to the complex shape of the ice and the blade geometry in general, several steps are necessary to receive good results for the icing volume. The general approach consists of these main steps that are described in detail hereinafter:
- Define the reference profile (first measurement of the series) and offset it, concatenate the reference with another measurement profile and determine
- Reconstruct edge icing by connecting the borders of the reference and the measurement surfaces with auxiliary points
- Create the alpha shape for the concatenation of reference, measurement and auxiliary points using slightly bigger than and extract the volume
2.5.1. Definition of a Reference Surface and Determination of
The reference surface is defined as the first profile of each measurement series. To ensure a proper working of the alpha shape algorithm for small differences between the reference surface and a measurement surface, we offset the reference data slightly by a value in the opposite direction of the icing. This leads to a better distinction between the reference profile and the surfaces of small layers of ice or ice free parts of the blades and thus prevents the facets of the alpha shape to span over the concave leading edge of the blades. The offset should be chosen as low as possible but it should be higher than deviations in the measurement of the laser scanner, e.g. due to slight out of plane motions of the rotor. The resulting volume offset is calculated from the alpha shape around the reference data with and without the offset and must be subtracted from all other measurements to compensate for the offset. For bigger layers of ice that exceed the original blade surface an additional error can be expected due to a slight change in the angle of the lines that connect the borders of both surfaces but this is assumed to be negligible compared to the impact of bad connections in the alpha shape and other uncertainties like measurement noise.
Additionally, the offset volume can be used to validate the algorithm that is used to construct the alpha shape. The linear shift leads to a volume that can be compared to the analytical solution from the surface area A and the offset distance :
Figure 13 shows the effect of the offset by comparing different ways to create the alpha shape for a section in the middle of the specimens. An ice free measurement was chosen for the demonstration, the correct result for the ice volume therefor would be zero. All values for were determined automatically by Matlab. For a better visualisation of the effects, the pictures show the bottom side of the resulting volume, the leading edge is on the right side. The left picture shows the resulting shape from the measurement data and the unchanged reference. The resulting shape fills a big portion of the concave leading edge which leads to an overestimation of the volume. To the right, the shape of the measurement with an offset reference is portrayed. The facets in the leading edge are much finer than before. This is due to a smaller , which results in a better approximation of the measured volume. However, just reducing for the case without an offset to get smaller facets can lead to a fragmented shape that does not envelop all data points.
The Matlab function "alphaShape" needs the point coordinates as an input. They can be presented as a matrix with three columns, in which each row contains the coordinate values of a point in the order x, y and z. The reference and measurement data are concatenated and handed over to the function. Due to the fact, that no is defined, Matlab will set it to automatically. The value is derived from the alpha spectrum, that lists alphas that produce distinct shapes for the given data, where there is a notable change in the resulting shape. It then can be extracted from the properties of the resulting alpha shape object.
2.5.2. Recreation of Leading and Trailing Edge Icing
With the progressive icing of the blades, the shape of the surface is changing. Especially the leading edge experiences much more icing due to its "cutting" motion through the mist. If the formed ice exceeds the reference surface, this can lead to overhangs as depicted in Figure 14, which in turn can implicate significant underestimations of the actual volume. This problem arises from the demand for a small alpha-radius to obtain a detailed recreation of the surface structure. A straightforward solution to this is to fill the area between the two surfaces with auxiliary data points that "guide" the alpha shape as desired while using a small alpha-radius. In this case, straight lines were constructed between the border points of both surfaces. For each point in the data set that has more border samples, the closest neighbor in the other set is determined and the connection line filled with equidistant points with a given target density of four points per millimeter, which is slightly smaller than the radial resolution of the measurement system.
2.5.3. Create the Alpha Shape and Extract the Volume
As mentioned earlier, a set of points has a whole family of corresponding alpha shape objects to choose from, depending on . The final alpha shape is created from the concatenation of the reference, measurement and auxiliary points, with . It should be noted that the used factor was chosen arbitrarily based on the results of different examples and might differ for other experimental set-ups and data structures. A strict definition for might lead to good results when changes in the spatial arrangement and differences in the density of the measured points are within a small range, which is not given for the present experimental design. also varies strongly with the amount of ice on the rotor blades.
3. Results
3.1. Experimental Design
Two measurement campaigns were carried out at temperatures of -10 and -20 °C, each consisting of seven measurement series, one for each possible nozzle configuration. All series were aimed to contain about 40 measurements. The measurements were conducted every three minutes and lasted 40 s each. For each measurement series before the start of the icing process, three measurements were conducted to provide information about the initial conditions and measurement deviations of the laser scanner. In all cases, the blades were rotated at a speed of 100 rpm, which translates to a tip velocity of 2.8 .
To receive a high spatial resolution of the iced blades, the number of measured lines in each single rotation was set to 1080. The collected data was processed as described in Chapters Section 2.4 and Section 2.5. Three sections along the actual blade surface are defined with regard to the main icing area of each nozzle and their volumes are computed separately, as displayed in the Figure 15. This has the positive side effect of lowering the overall difference in sampling density within each area, which leads to better adapted values for .
The results for three different offsets, 0, -0.1 mm and -0.5 mm, were computed and are further discussed in Chapter 3.3.
3.2. Results of the Preprocessing and Ice Distribution
Exemplary results of the preprocessing for a measurement from the series -20C_010 are shown in Figure 16. All outliers were removed successfully while preserving most of the valid data. The resulting surface is a 3D representation of the ice distribution on the rotor blade with a high spatial resolution.
3.3. Comparison of Different Offsets for the Volume Calculation
Figure 17 shows the calculated volumes of Blade II for the nozzle configuration [0,0,1] at a temperature of -20 °C for three different offsets for the reference data, as well as the trends of the median values of each blade section. For the cases where an offset was applied, it was compensated by subtracting it from each measurement which, while physically impossible, can lead to negative values. The presented nozzle configuration was chosen for the reason that the innermost blade section can be expected to remain totally free from ice. As it can be seen in Figure 3, all blade sections further out from the active nozzle experience leading edge icing to some extent. Additionally, at a certain point, the ice may exceed the defined borders of the section and is partially counted to the neighboring section(s). The expected qualitative trends for all blade sections are as follows:
Regardless of the offset, the overall trends of the volumes match the expectations, but there are several observations to be made that are elaborated in the following.
As expected, the impact of the offset is small when there is enough ice present on the blade, as it is the case for Section 1, because the additional layer exerts the same effect to allow for a clear distinction between the measurement and the reference surface. Section 2 also experiences converging results, as the ice starts to grow over the border from Section 3. The remaining difference can be explained by the effect, that the ice does only partially cover the section (see transition zones in Figure 15). This leaves the ice free part prone to flawed connections in the alpha shape at the concave leading edge as discussed in Chapter 3.3. The biggest impact of the offset can be seen for Section 1, where it can drastically lower the resulting volumes by up to 1500 for an offset of -0.5 mm. Additionally, this leads to remarkably smoother results.
To finally determine which results are most trustworthy, they are qualitatively compared to the deviations of the median values of the corresponding sections. While the median is not a suitable parameter to determine the actual volume, it can give an overall hint on the icing trend, as it is shown by the correlation in Section 3. For Section 1 and 2, negative median trends can be observed, which can be caused by tilting motions of the rotor out of its plane. In Section 1 it is advancing over the whole measurement series, which suggests that there might be some kind of a rotor displacement that is influenced by the growing ice. However, the change in the median stays withing a small range of a fraction of a millimeter, and is quite small compared to the influence of the ice, but with a range of up to -0.18 mm it is still big enough to compensate the applied offset in the case of -0.1 mm. This has visible implications on the resulting volumes, that are quite similar to the ones calculated without an offset and don’t follow the same trend as the change in median, which again is attributed to bad connections in the alpha shape when the reference and measurement surface are not distinct. However, the offset of -0.5 mm is big enough to withstand the compensation, which allows more stable results for the volumes with a good correlation to the median change. This leads to the conclusion, that, for the measurements conducted in this paper, the offset of -0.5 mm leads to the results with the highest confidence, and is used for all following results presented.
3.4. Icing of the Blades
In general, the icing took place only on the upper blade surface that was facing towards the nozzles and at the leading edge, while the lower blade side remained ice free. To determine the type of ice on the specimens, the following parameters were used and compared to the characteristics in [7]:
- ambient temperature
- visual appearance
- density
Different types of ice were observed for both measurement campaigns. For a temperature of -20 °C, the probability of forming soft rime ice is very high. This gets further substantiated by the white opaque appearance and the low density of 0.342 on average (see Table 1). At temperatures of -10 °C, both soft and hard rime ice are possible. In that case, the slightly transparent appearance and the much higher density indicate the latter one, but a mixture of both seems also possible. The calculated densities are plausible and match the expectations based on the temperatures. This is taken as an indicator for the correctness of the calculated volumes.
In general, the ice accumulation happened evenly and almost linear on both specimen. This can be seen in Figure 18, which shows the cumulative ice volume over all three parts of the blades, calculated with a reference offset of -0.5 mm. Negative volumes, as they were discussed in the chapter before, were set to zero, otherwise they would distort the results. The high level of consistency between both blades suggests a good quality of the underlying measurement data. The linear ice growth matches the results of a study regarding the general behavior of rime ice on structures by Makkonen et al. [24]. The sharp drop in the 30th measurement step of Blade I for -20C_010 is due to heavily damaged raw data.
As expected, a higher number of open nozzles tends to lead to a faster icing of the blades. However, another import factor, that can overcompensate the active number of nozzles, is the mass flow through the nozzles that were prone to frequent changes (see Chapter 2.2). Also, icing at the tip of the blades was much harder to achieve than at the root, despite a higher mass flow through the according nozzle and the higher circumferential speed. This indicates, that the cutting motion of the blade through the water mist plays a subordinate role for the icing process. The speed of the water droplets is mainly influenced by their exit velocity at the nozzles. This means that for this set-up, the retention time of the blades in the water spray, that gets lower from the root to the tip of the blades, is crucial for the ice accumulation.
The precision of the ice detection regarding the average layer thickness can be estimated from the blade surface area and the volume gradients between the measurement steps. Based on the present measurement results, it lies within sub-millimeter range.
4. Discussion and Conclusions
The test rig and data processing procedures described in this paper were found capable of inducing a natural ice growth on rotating blade specimens and measuring the consequential ice distributions and volumes. It is able to detect icing on sub-millimeter scale. The presented approach for the volume calculation, based on Matlabs inbuilt "alphaShape"-function, makes it easy to implement. The level of detail in the volume reconstruction might be improved using more sophisticated algorithms that adapt based on local sampling density as proposed in [18]. On the other hand, this might be more computationally expensive. The resulting volumes were found to be very plausible, but further work can be done to exactly evaluate the precision of the volume calculation. Comparisons to numerical models for ice accretion would also be interesting, but to match the experimental and modeling results, the test rig might have to be expanded to be capable of measuring the size and speed of the water droplets.
Another field with room to improvement is the reconstruction of leading edge icing. The presented measurement arrangement is not able to completely catch the ice structures there. This might be solved with another profile scanner that operates in the opposite direction as the first one and provides a backside view of the specimen. Alternatively, analytical formulas that approximate the leading edge ice shape could be used for a more realistic reconstruction [25]. However, the implementation might be challenging.
It seems possible to adapt the proposed system for other tasks as well, e.g. to detect the accumulation of dirt, abrasion, de-icing processes or other effects that change or deform the surface of a surveyed object. While the data generation and processing was done offline in this paper, it would be possible to adapt it for continuous online surveillance, if necessary.
Funding
The authors would like to express their gratitude for the financial support from the Deutsche Forschungsgemeinschaft (funding code CZ 55/38-2 | GU 614/14-2 | KO 2967/5-2).
Acknowledgments
This research was funded by the Deutsche Forschungsgemeinschaft under the Grant Nos. CZ 55/38-2 | GU 614/14-2 | KO 2967/5-2. We thank for the financial funding of the Dresden Center for Intelligent Materials (DCIM) by the Free State of Saxony and TU Dresden.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Holbein, T. IEA Wind TCP Recommended Practice 13 2nd Edition: Wind Energy in Cold Climates 2017. p. 49.
- Homola, M.C.; Nicklasson, P.J.; Sundsbø, P.A. Ice sensors for wind turbines. Cold Regions Science and Technology 2006, 46, 125–131. [Google Scholar] [CrossRef]
- Yirtici, O.; Tuncer, I.H.; Ozgen, S. Ice Accretion Prediction on Wind Turbines and Consequent Power Losses. Journal of Physics: Conference Series 2016, 753, 022022. [Google Scholar] [CrossRef]
- Homola, M.C.; Virk, M.S.; Nicklasson, P.J.; Sundsbø, P.A. Performance losses due to ice accretion for a 5 MW wind turbine: Performance losses due to ice accretion for a 5 MW wind turbine. Wind Energy 2012, 15, 379–389. [Google Scholar] [CrossRef]
- Lehtomäki, V.; Krenn, A.; Jordaens, P.J.; Godreau, C.; Davis, N.; Khadiri-Yazami, Z.; Bredesen, R.E.; Ronsten, G.; Wickman, H.; Bourgeois, S.; Beckford, T. IEA Wind TCP Task 19_Available Technologies, 2018.
- Ilinca, A. Analysis and Mitigation of Icing Effects on Wind Turbines. In Wind Turbines; Al-Bahadly, I.H., Ed.; InTech, 2011. [CrossRef]
- ISO 12494: Atmospheric icing of structures, 2017.
- DNVGL-RP-0175: Icing of wind turbines, 2017.
- Drapalik, M.; Zajicek, L.; Purker, S. Ice aggregation and ice throw from small wind turbines. Cold Regions Science and Technology 2021, 192, 103399. [Google Scholar] [CrossRef]
- Jin, J.Y.; Virk, M.S. Experimental study of ice accretion on S826 & S832 wind turbine blade profiles. Cold Regions Science and Technology 2020, 169, 102913. [Google Scholar] [CrossRef]
- Hudecz, A.; Koss, H.; Hansen, M.O.L. Ice Accretion on Wind Turbine Blades 2013. p. 9.
- Hochart, C.; Fortin, G.; Perron, J.; Ilinca, A. Wind turbine performance under icing conditions. Wind Energy 2008, 11, 319–333. [Google Scholar] [CrossRef]
- Han, Y.; Palacios, J.; Schmitz, S. Scaled ice accretion experiments on a rotating wind turbine blade. Journal of Wind Engineering and Industrial Aerodynamics 2012, 109, 55–67. [Google Scholar] [CrossRef]
- Gantasala, S.; Luneno, J.C.; Aidanpää, J.O. Identification of ice mass accumulated on wind turbine blades using its natural frequencies. Wind Engineering 2018, 42, 66–84. [Google Scholar] [CrossRef]
- Filippatos, A.; Dannemann, M.; Nguyen, M.; Brenner, D.; Gude, M. Influence of Ice Accumulation on the Structural Dynamic Behaviour of Composite Rotors. Applied Sciences 2020, 10, 5063. [Google Scholar] [CrossRef]
- Lou, S.; Jiang, X.; Scott, P.J. Application of the morphological alpha shape method to the extraction of topographical features from engineering surfaces. Measurement 2013, 46, 1002–1008. [Google Scholar] [CrossRef]
- Xu, X.; Harada, K. Automatic surface reconstruction with alpha-shape method. The Visual Computer 2003, 19, 431–443. [Google Scholar] [CrossRef]
- Teichmann, M.; Capps, M. Surface reconstruction with anisotropic density-scaled alpha shapes. Proceedings Visualization ’98 (Cat. No.98CB36276); IEEE: Research Triangle Park, NC, USA, 1998; pp. 67–72. [Google Scholar] [CrossRef]
- Guo, B.; Menon, J.; Willette, B. Surface Reconstruction Using Alpha Shapes. Computer Graphics Forum 1997, 16, 177–190. [Google Scholar] [CrossRef]
- Bernardini, F.; Bajaj, C.L. Sampling and Reconstructing Manifolds Using Alpha-Shapes. p. 13.
- Schwab, S. smoothArea, https://de.mathworks.com/matlabcentral/fileexchange/110135-smootharea, 2022.
- Edelsbrunner, H. Alpha Shapes — a Survey. Wiadomości Matematyczne 2012, 48, 47. [Google Scholar] [CrossRef]
- Edelsbrunner, H.; Mucke, E.P. Three-Dimensional Alpha Shapes. p. 30.
- Makkonen, L.; Oleskiw, M.M. Small-scale experiments on rime icing. Cold Regions Science and Technology 1997, 25, 173–182. [Google Scholar] [CrossRef]
- Martini, F.; Contreras Montoya, L.T.; Ilinca, A. Review of Wind Turbine Icing Modelling Approaches. Energies 2021, 14, 5207. [Google Scholar] [CrossRef]
| 1 | The function was named "SmoothArea" and is available in the Matlab file exchange: [21] |
Figure 1.
Components and dimensions of the rotor blade specimens.
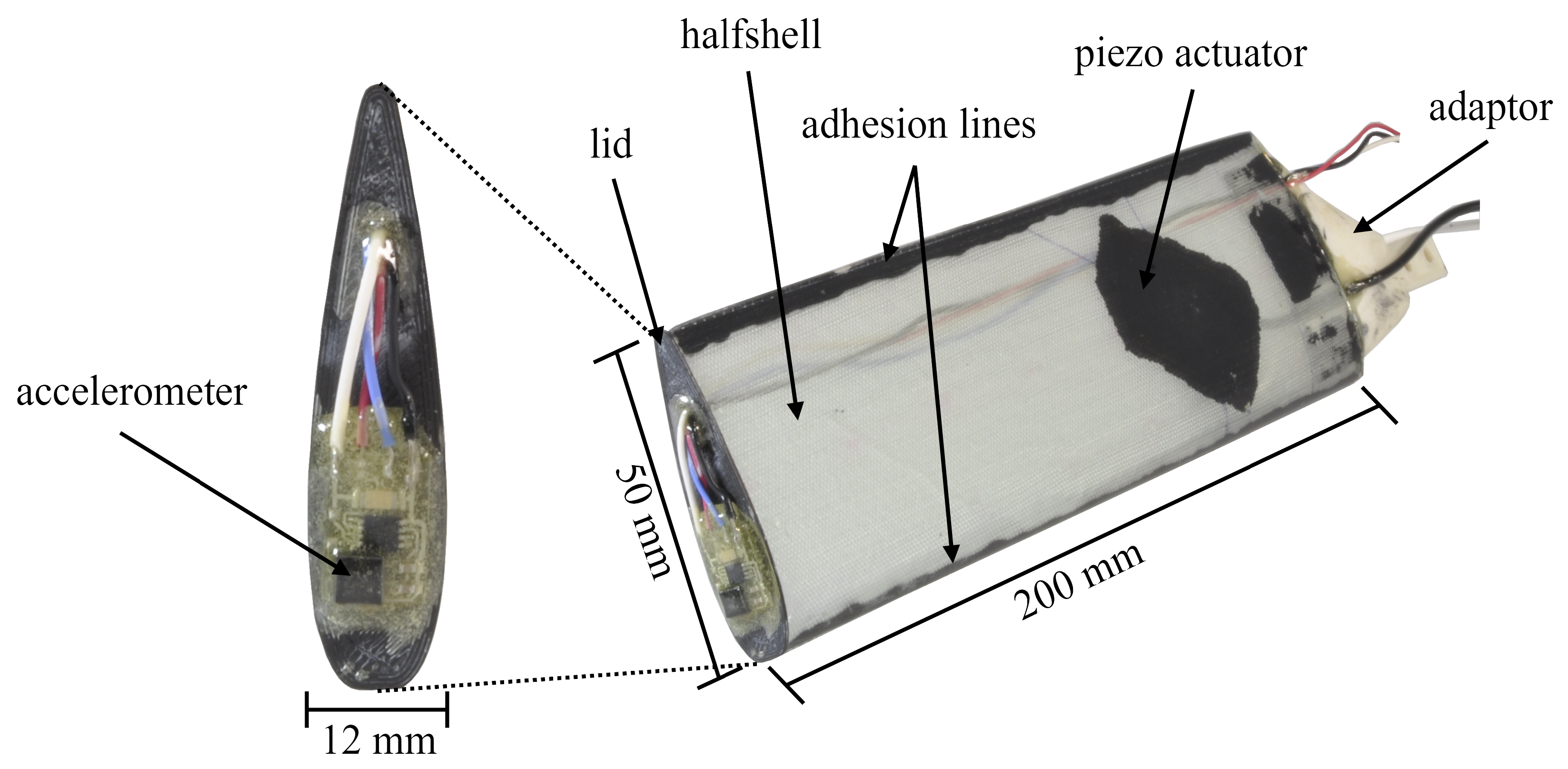
Figure 3.
Nozzle arrangement and main icing area of each nozzle.
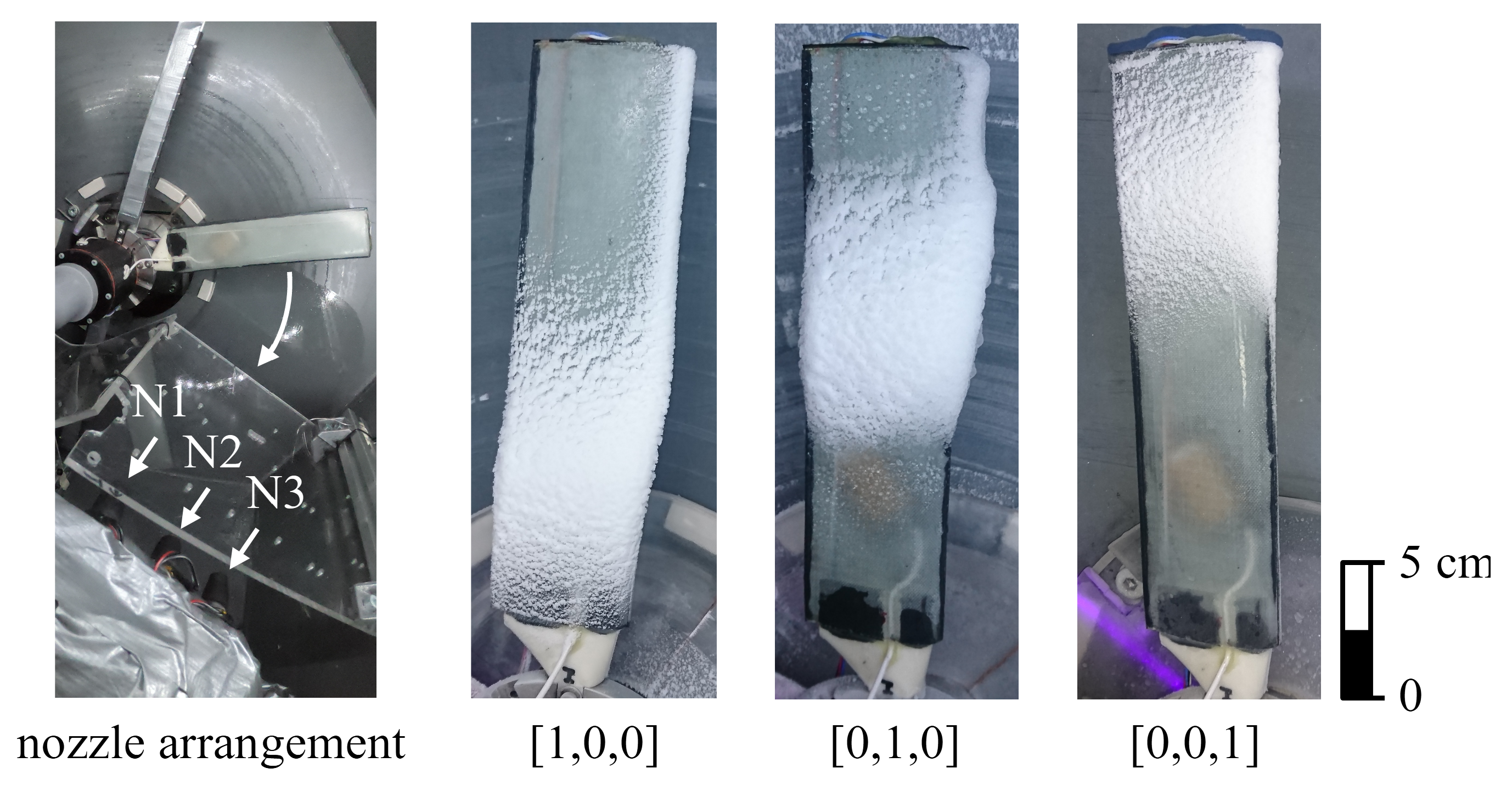
Figure 4.
Schematic visualization of the composition of the measurement data from the laser scanner.
Figure 4.
Schematic visualization of the composition of the measurement data from the laser scanner.
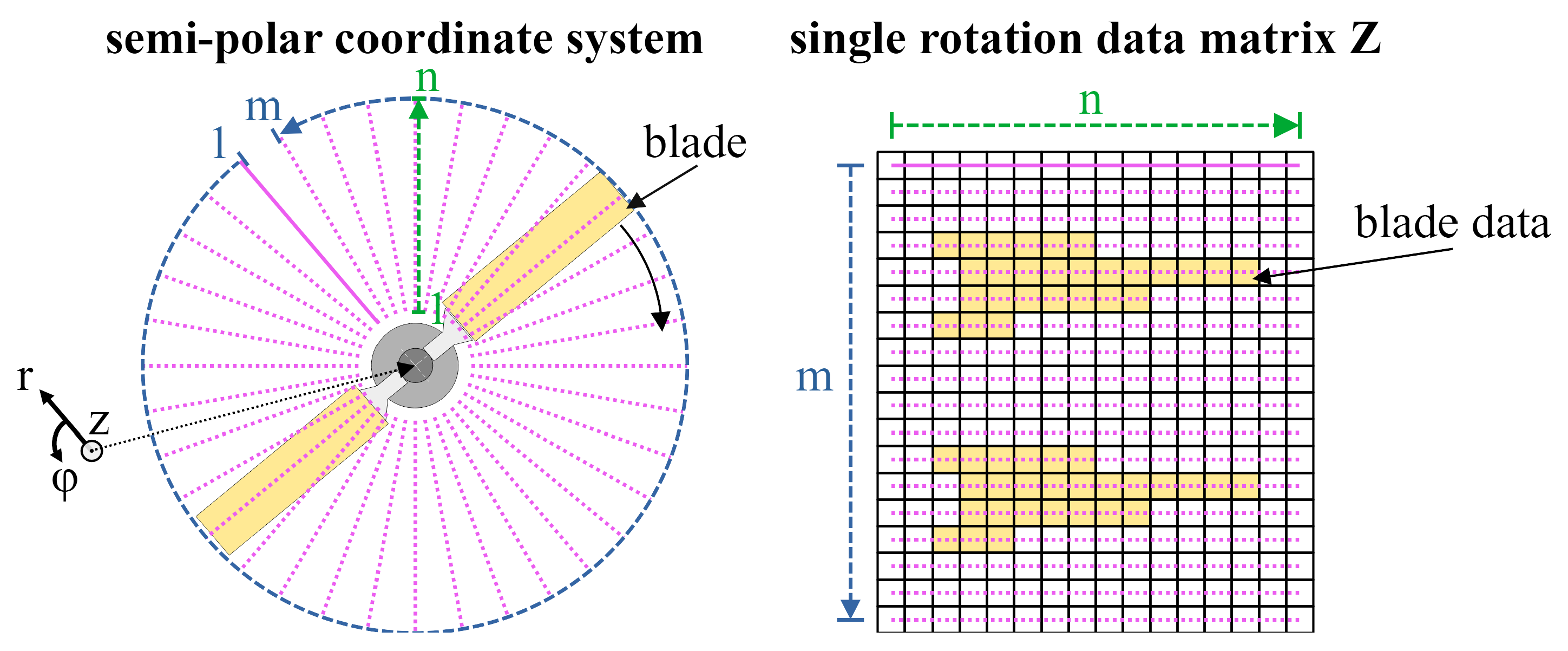
Figure 5.
Schematic diagram of the most important preprocessing steps for the laser data.
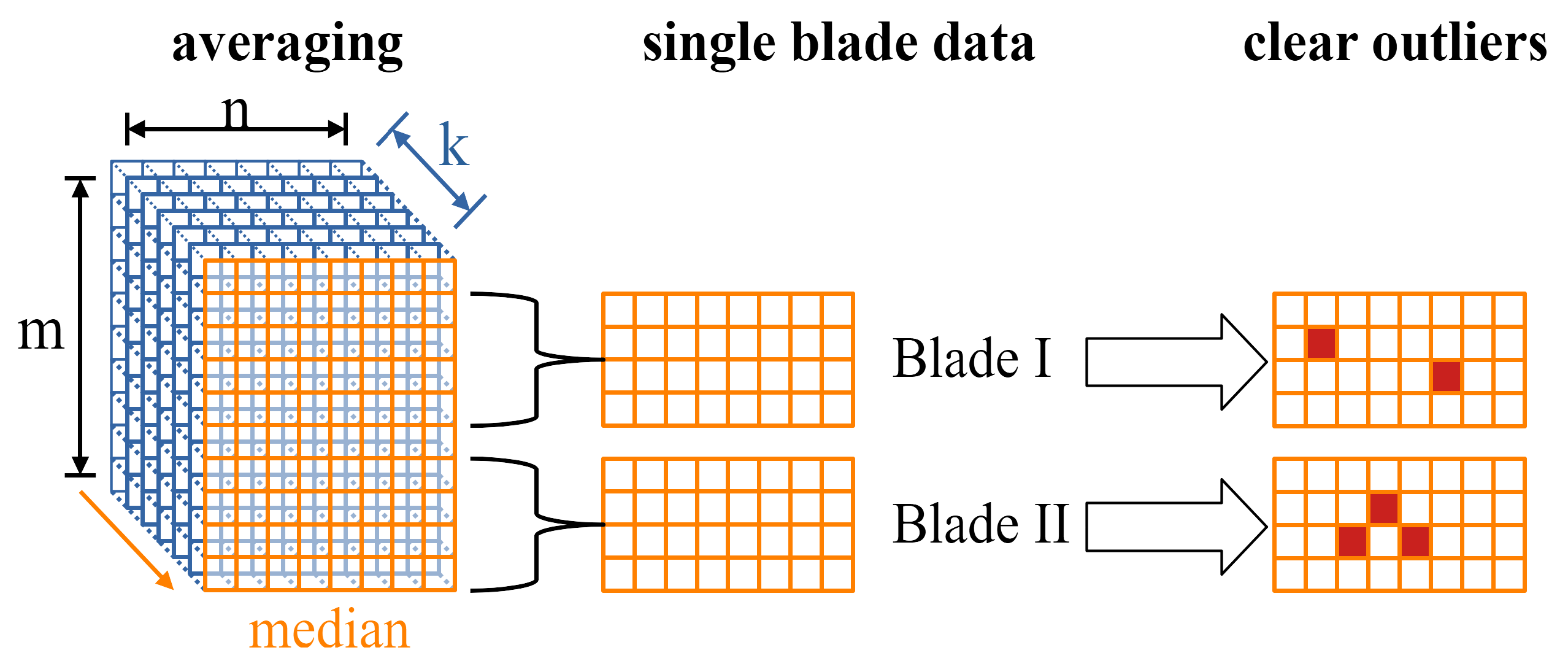
Figure 6.
Sketch of the calibration parameters for the laser scanner.
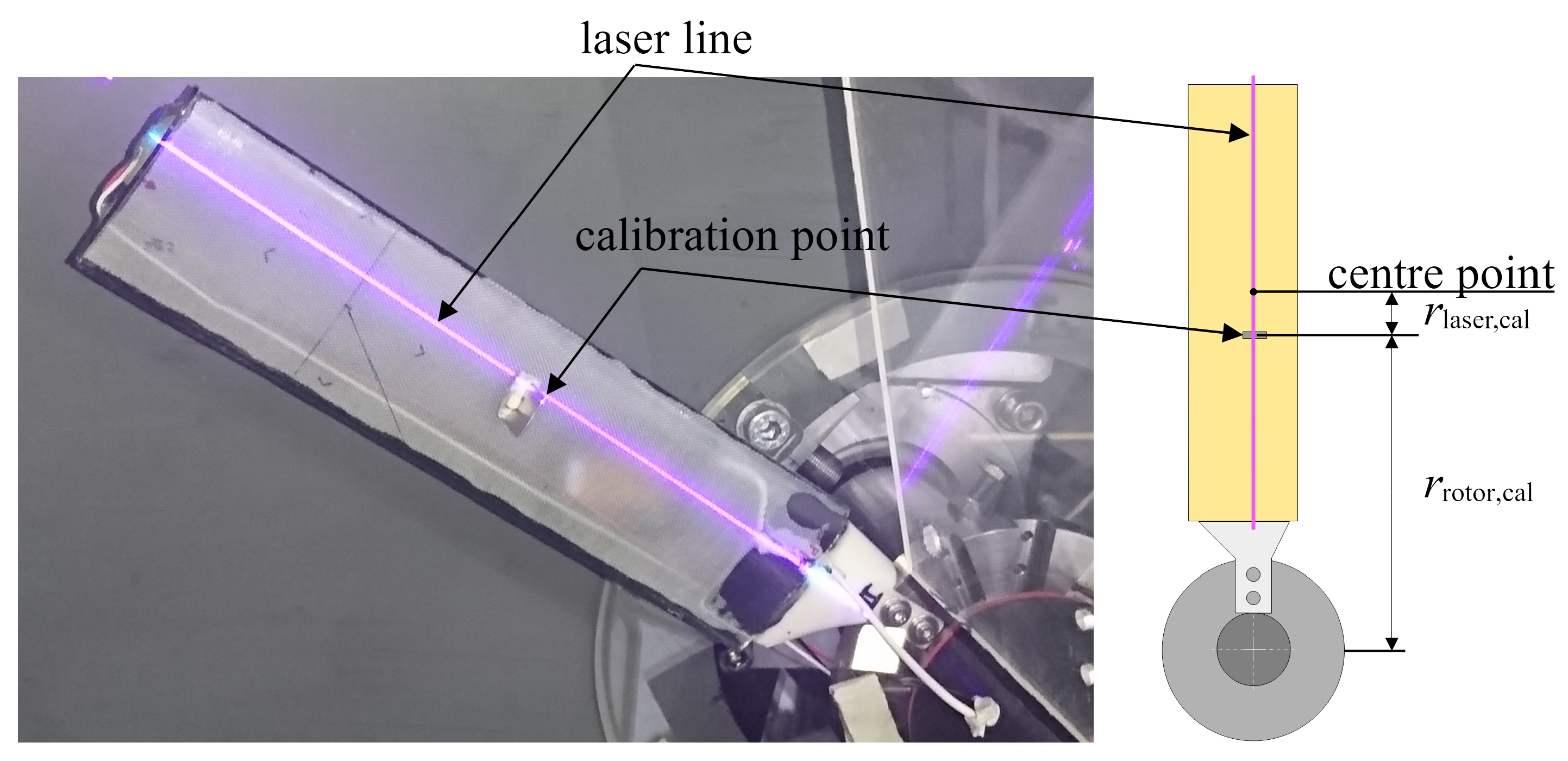
Figure 7.
Schematic visualization of the measurement data array of one blade and different approaches for outlier detection using all the data at once (global) or small subsets (local). Outliers located close to each other, as depicted in red, can be challenging to detect with local methods.
Figure 7.
Schematic visualization of the measurement data array of one blade and different approaches for outlier detection using all the data at once (global) or small subsets (local). Outliers located close to each other, as depicted in red, can be challenging to detect with local methods.
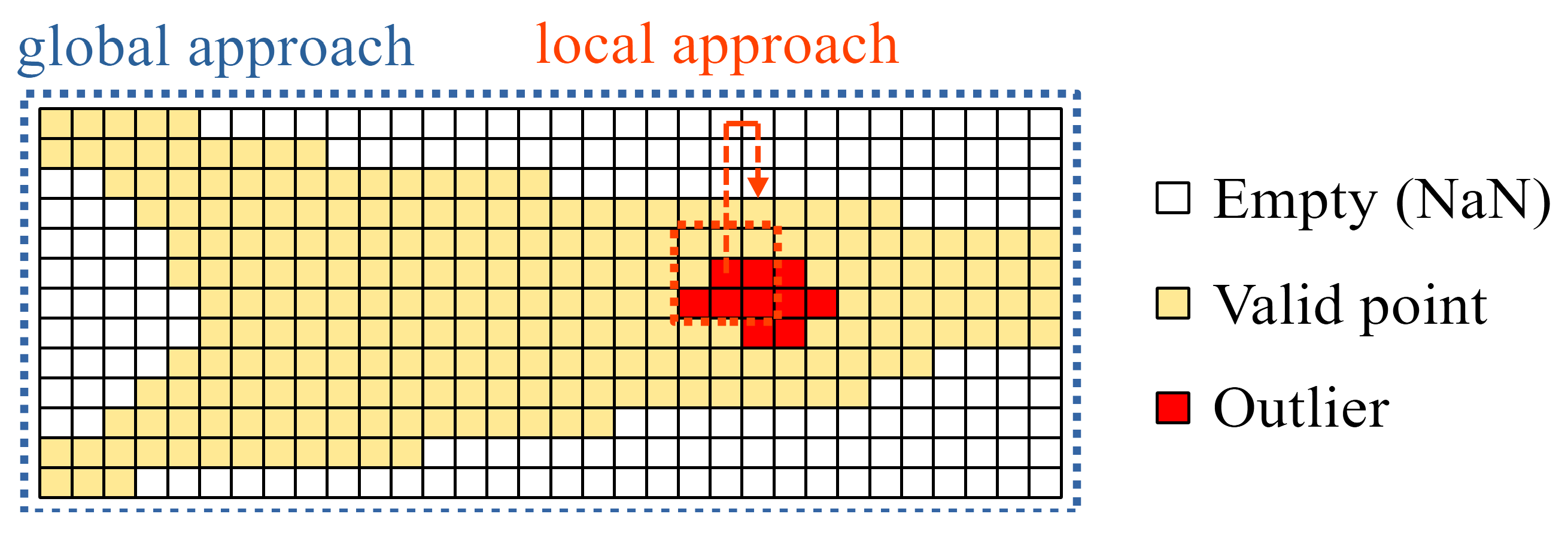
Figure 8.
Exemplary histogram of an iced blade with the nozzle configuration [0,1,0] and thresholds from the quartile outlier detection method.
Figure 8.
Exemplary histogram of an iced blade with the nozzle configuration [0,1,0] and thresholds from the quartile outlier detection method.
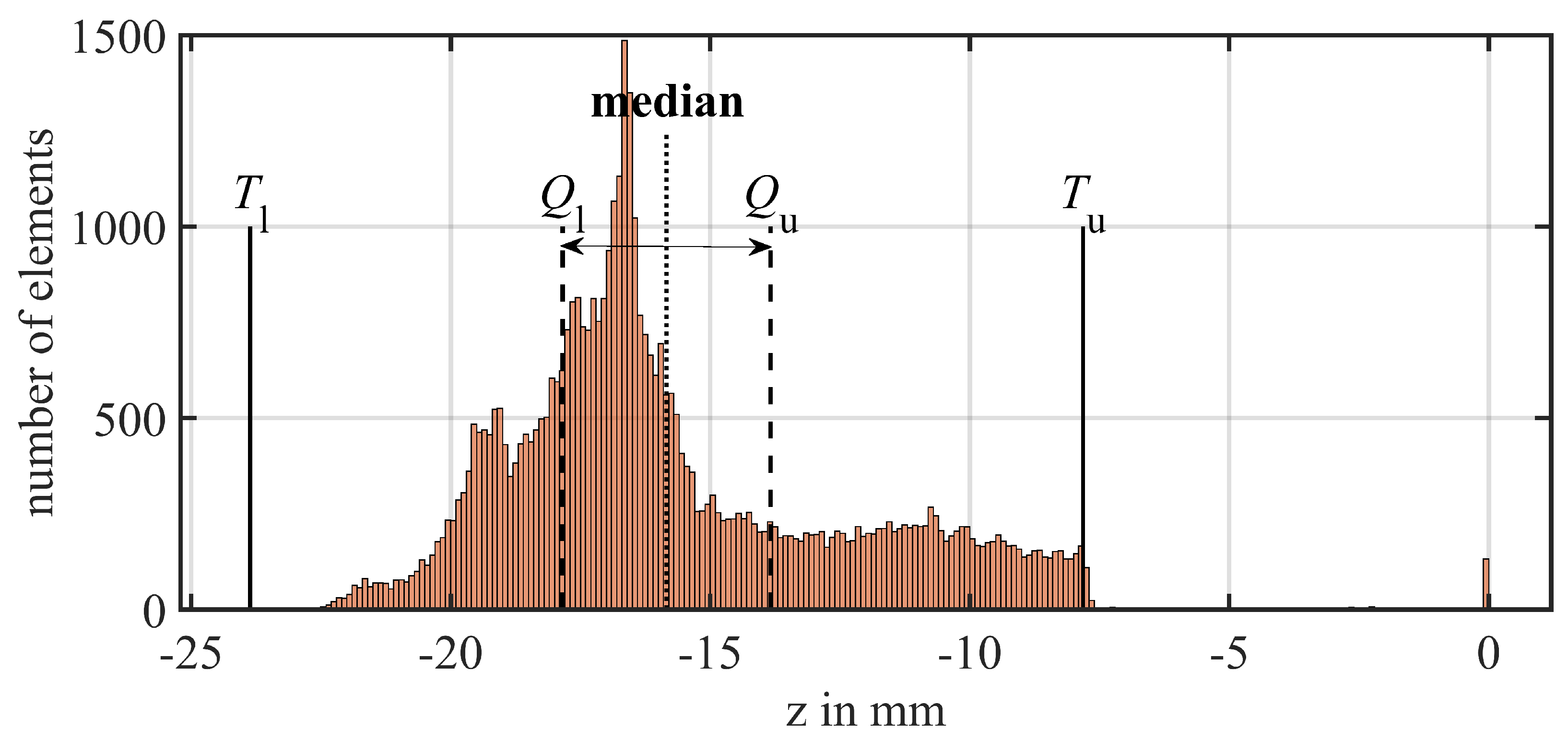
Figure 9.
Smoothing of the data using a two dimensional sliding window.
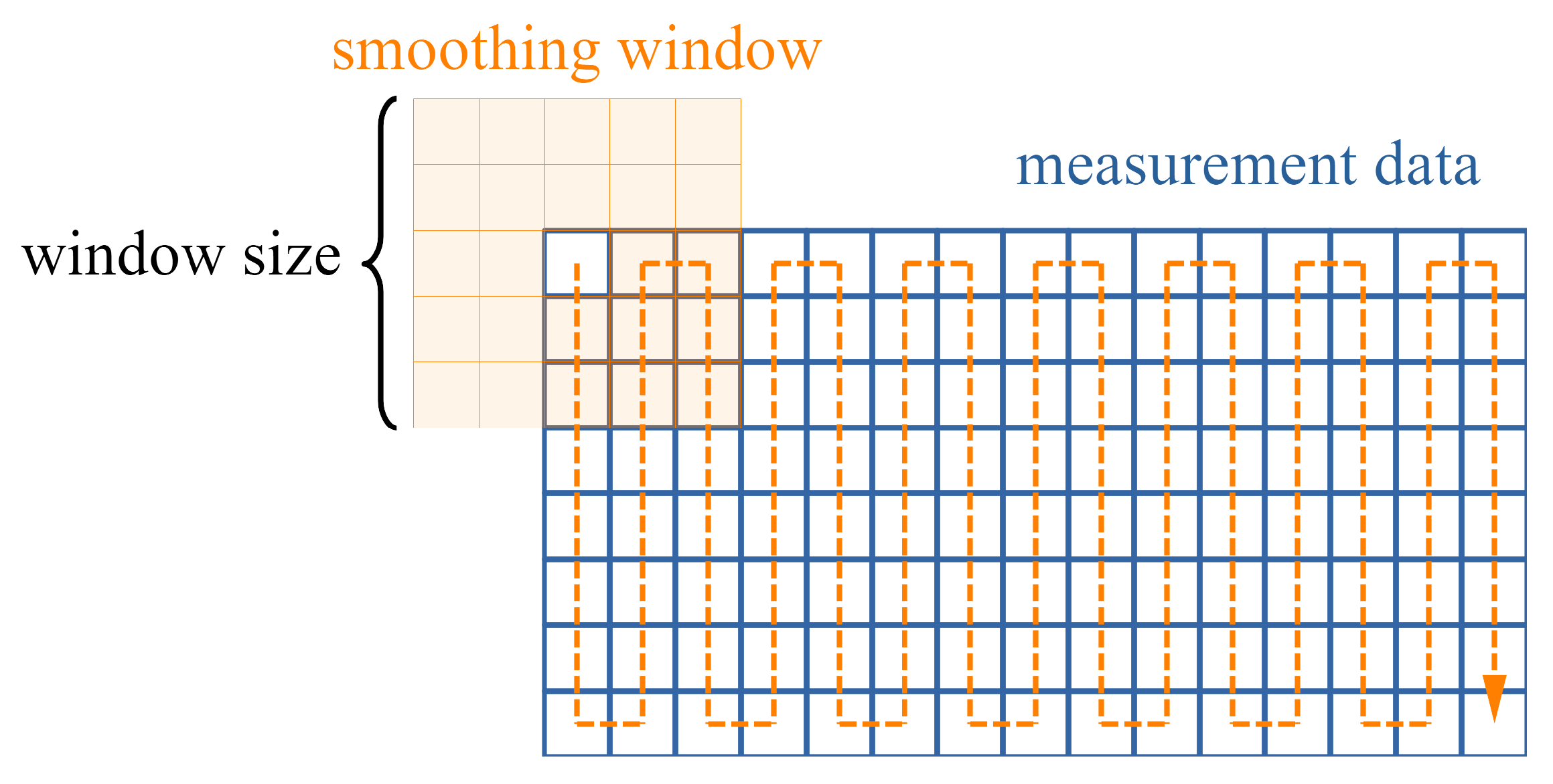
Figure 10.
Partial volume of the iced mid part of a blade, enveloped by the reference (red) and a measurement profile (blue).
Figure 10.
Partial volume of the iced mid part of a blade, enveloped by the reference (red) and a measurement profile (blue).
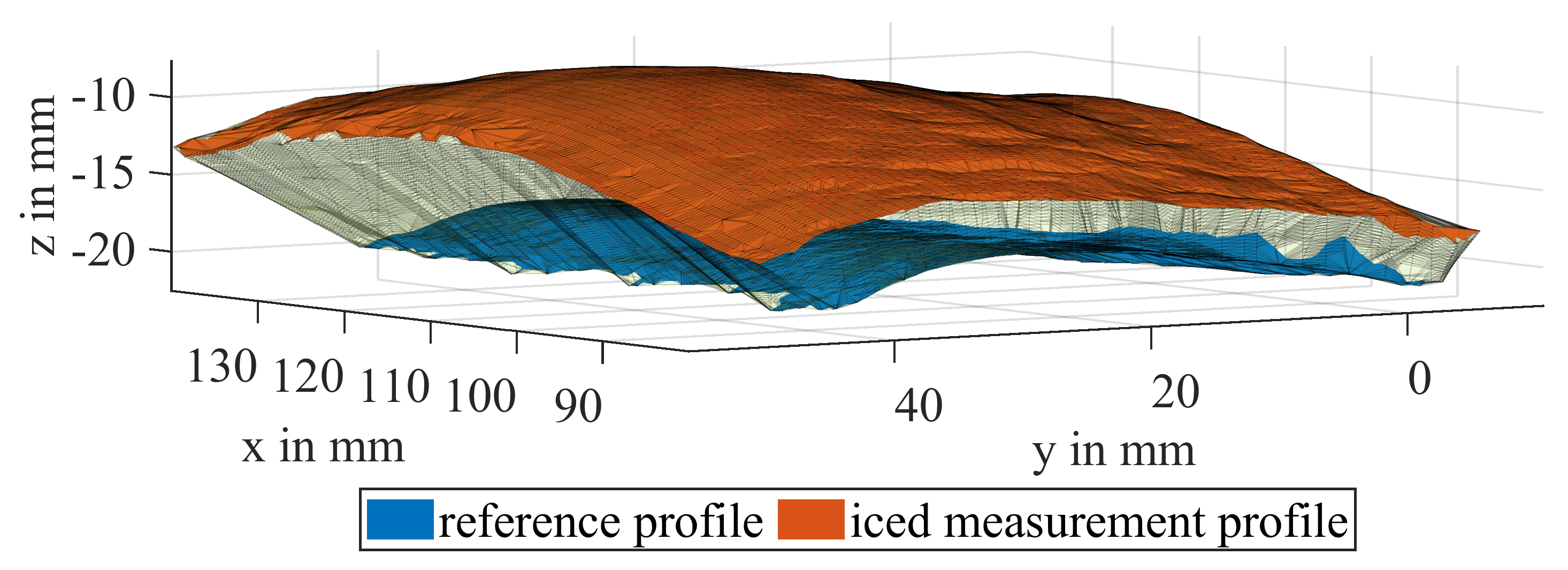
Figure 11.
Effect of the -radius on the resulting shape exemplary shown for two linked tori (based on [23]). An alpha that approaches infinity forms the convex hull of the point cloud.
Figure 11.
Effect of the -radius on the resulting shape exemplary shown for two linked tori (based on [23]). An alpha that approaches infinity forms the convex hull of the point cloud.
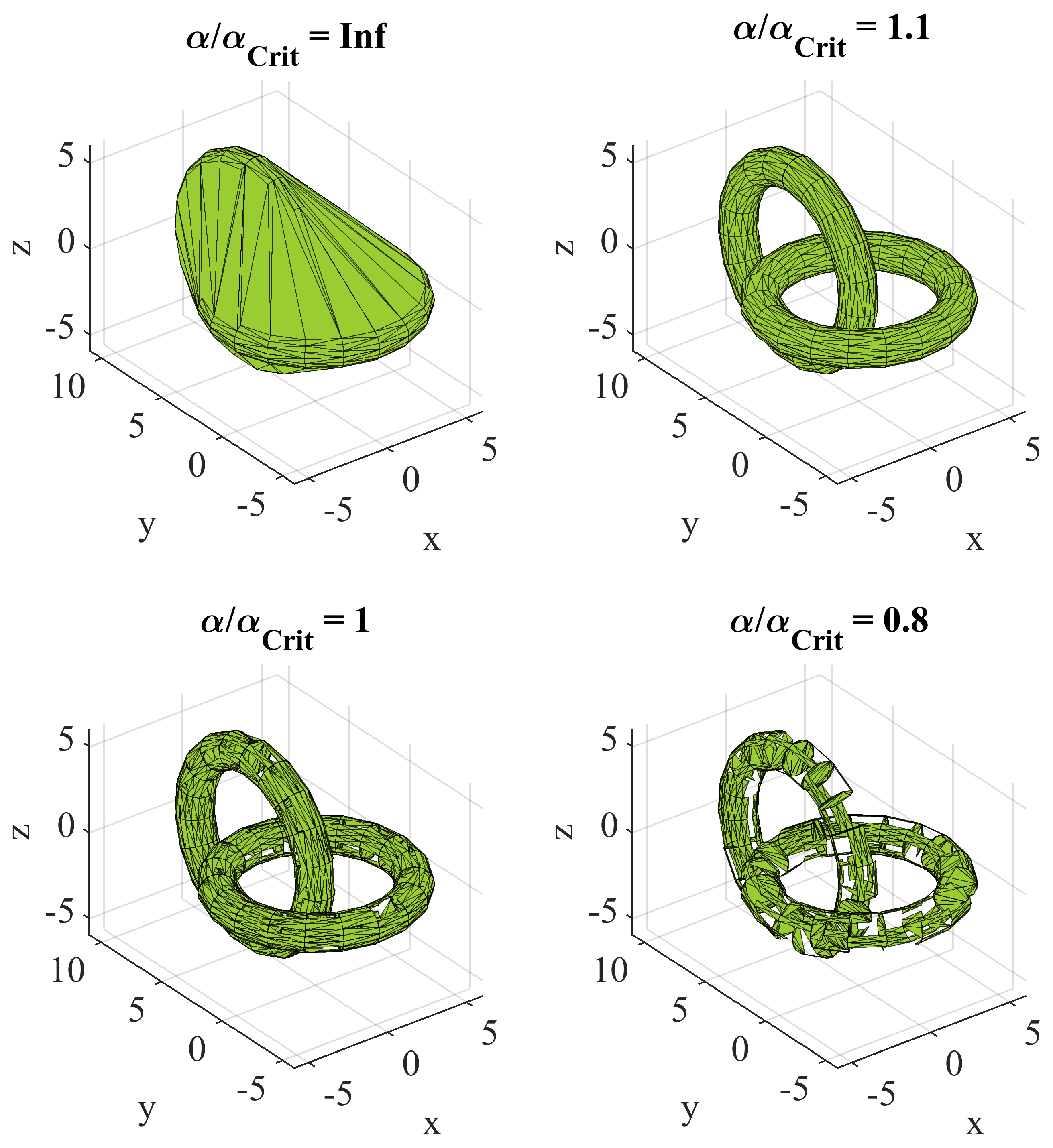
Figure 12.
Boundary facets that cross the inside of the volume (left) can be suppressed by choosing the value carefully (right).
Figure 12.
Boundary facets that cross the inside of the volume (left) can be suppressed by choosing the value carefully (right).
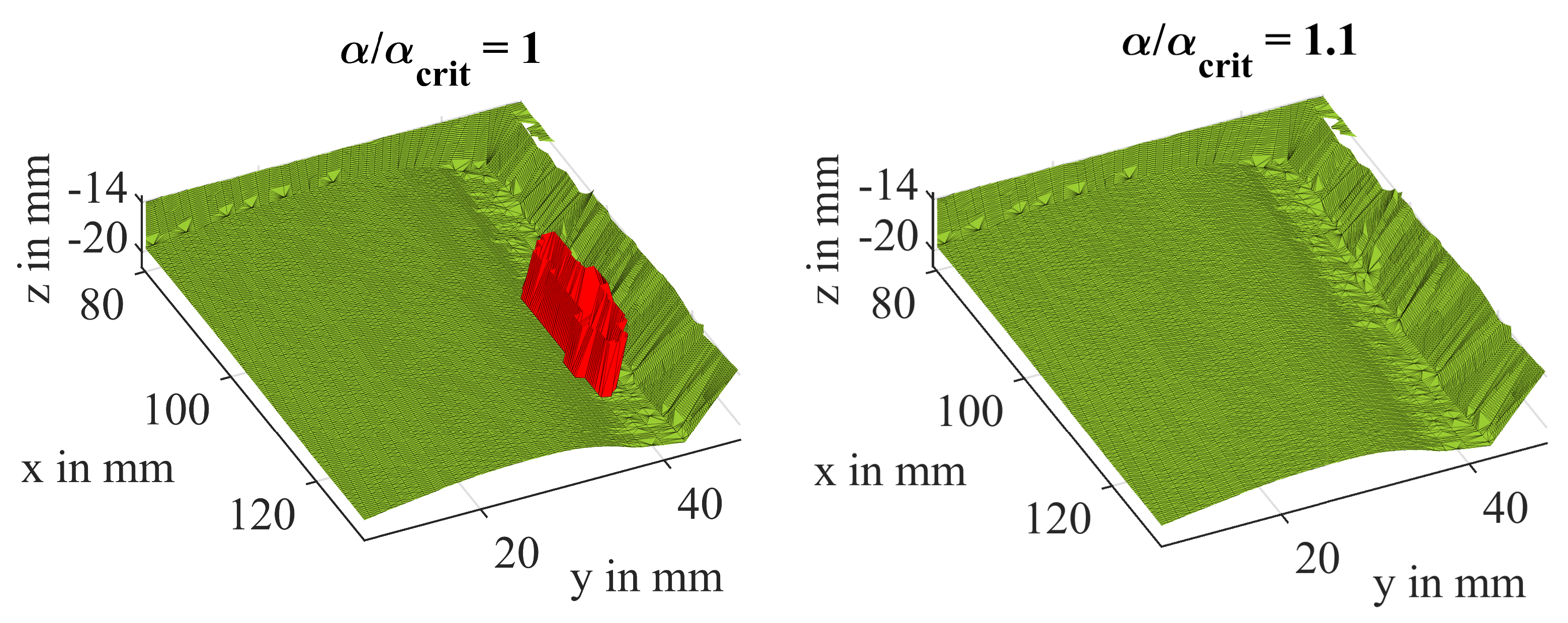
Figure 13.
Bottom view of the rotor blades mid-part alpha shape, illustrating the effect of an offset reference profile: The facets on the concave leading edge, as well as the edges themselves, are much more detailed, when applying an appropriate offset (b).
Figure 13.
Bottom view of the rotor blades mid-part alpha shape, illustrating the effect of an offset reference profile: The facets on the concave leading edge, as well as the edges themselves, are much more detailed, when applying an appropriate offset (b).
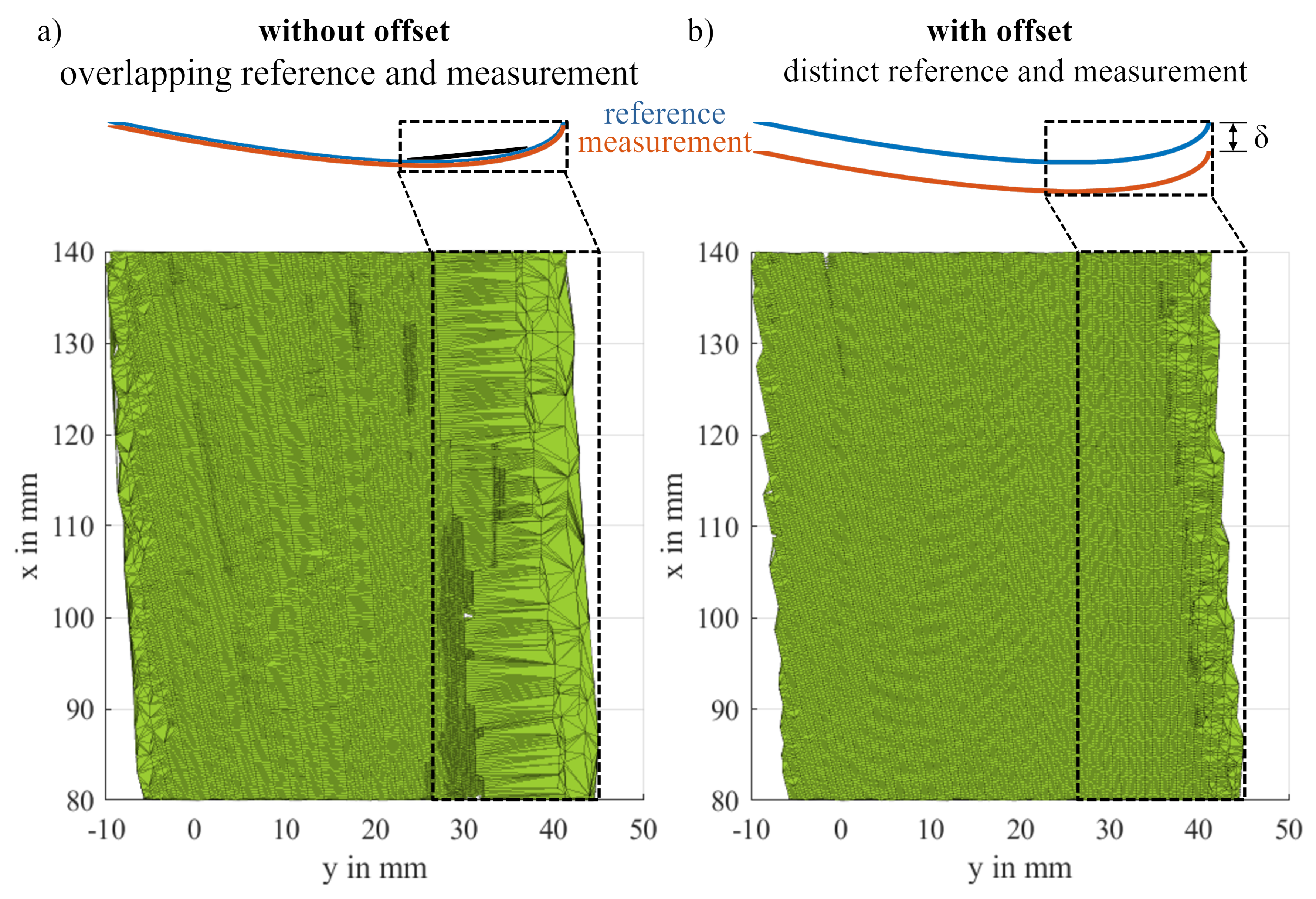
Figure 14.
The iced measurement profile and the reference profile were connected with straight lines of auxiliary points along their borders (a) to avoid the creation of overhanging structures (b). The resulting shape is a better reconstruction of leading edge icing (c).
Figure 14.
The iced measurement profile and the reference profile were connected with straight lines of auxiliary points along their borders (a) to avoid the creation of overhanging structures (b). The resulting shape is a better reconstruction of leading edge icing (c).
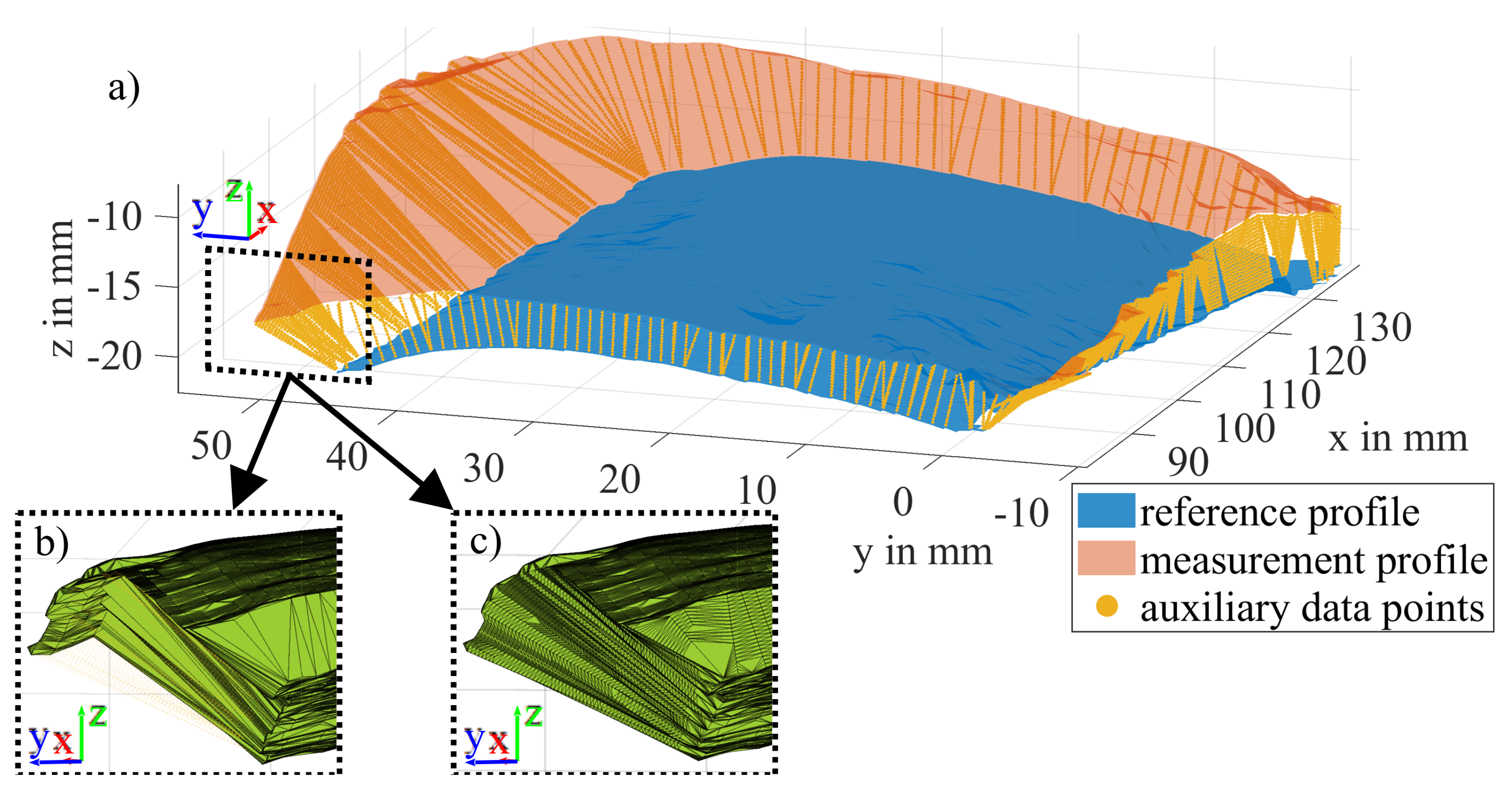
Figure 15.
Sections for the volume calculation are defined according to the main icing areas (Series -20C_101).
Figure 15.
Sections for the volume calculation are defined according to the main icing areas (Series -20C_101).
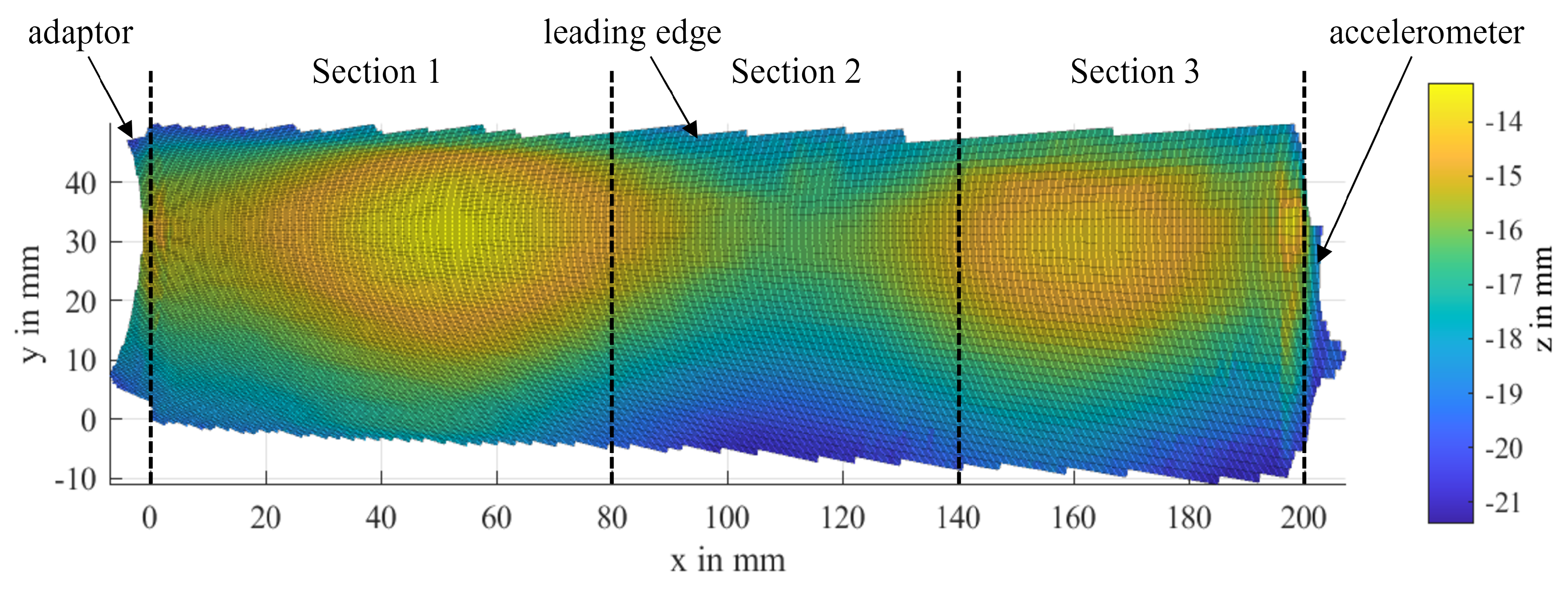
Figure 16.
Found outliers during the preprocessing of the laser scanner data (a) and cleaned profile (b) for an iced blade with the nozzle configuration [0,1,0].
Figure 16.
Found outliers during the preprocessing of the laser scanner data (a) and cleaned profile (b) for an iced blade with the nozzle configuration [0,1,0].
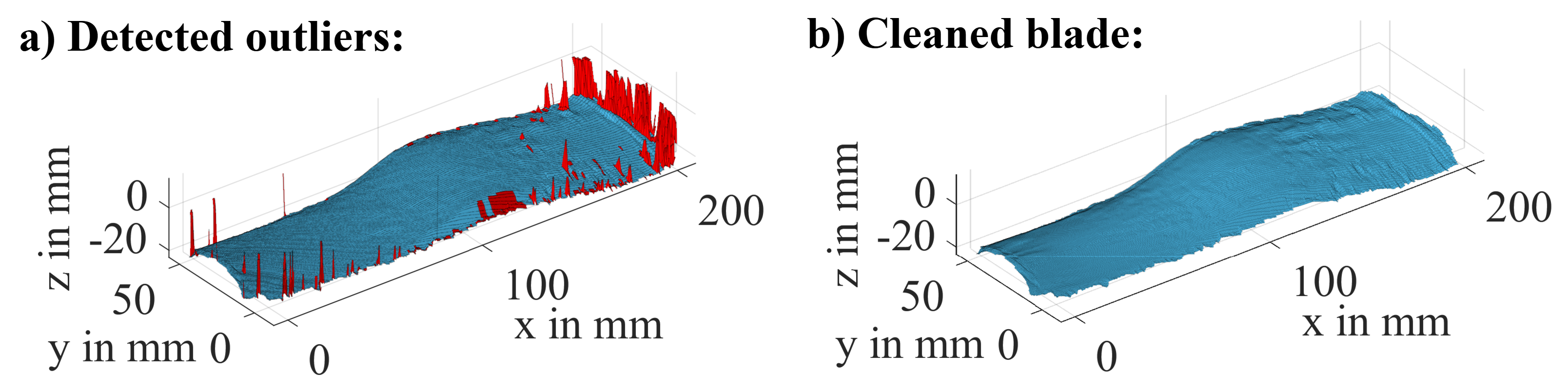
Figure 17.
Comparison of different offsets for the reference surface for exemplary Data from Blade II with the nozzle configuration [0,0,1].
Figure 17.
Comparison of different offsets for the reference surface for exemplary Data from Blade II with the nozzle configuration [0,0,1].
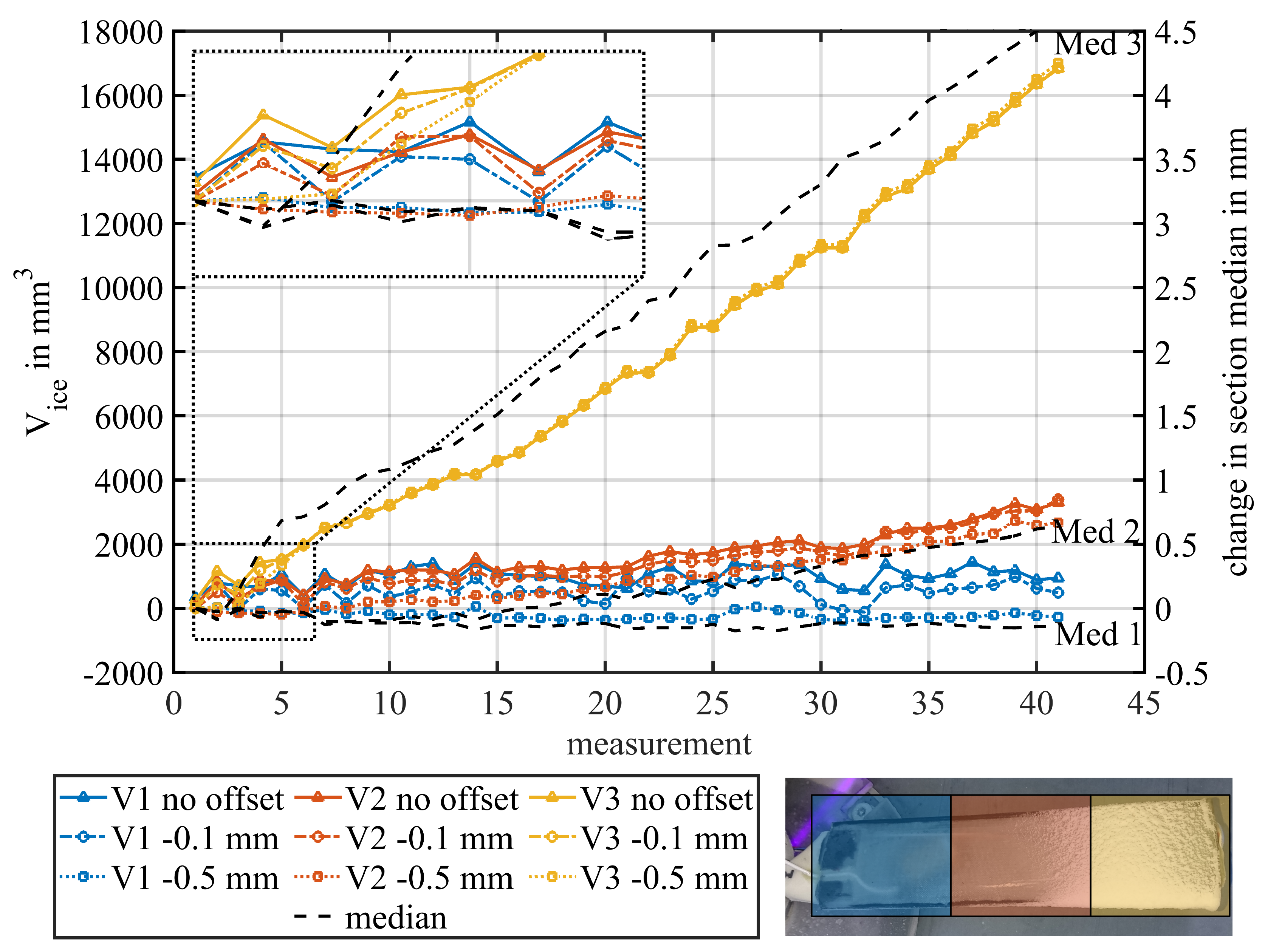
Figure 18.
Total ice volumes of both blades for the measurement series at -20 °C.
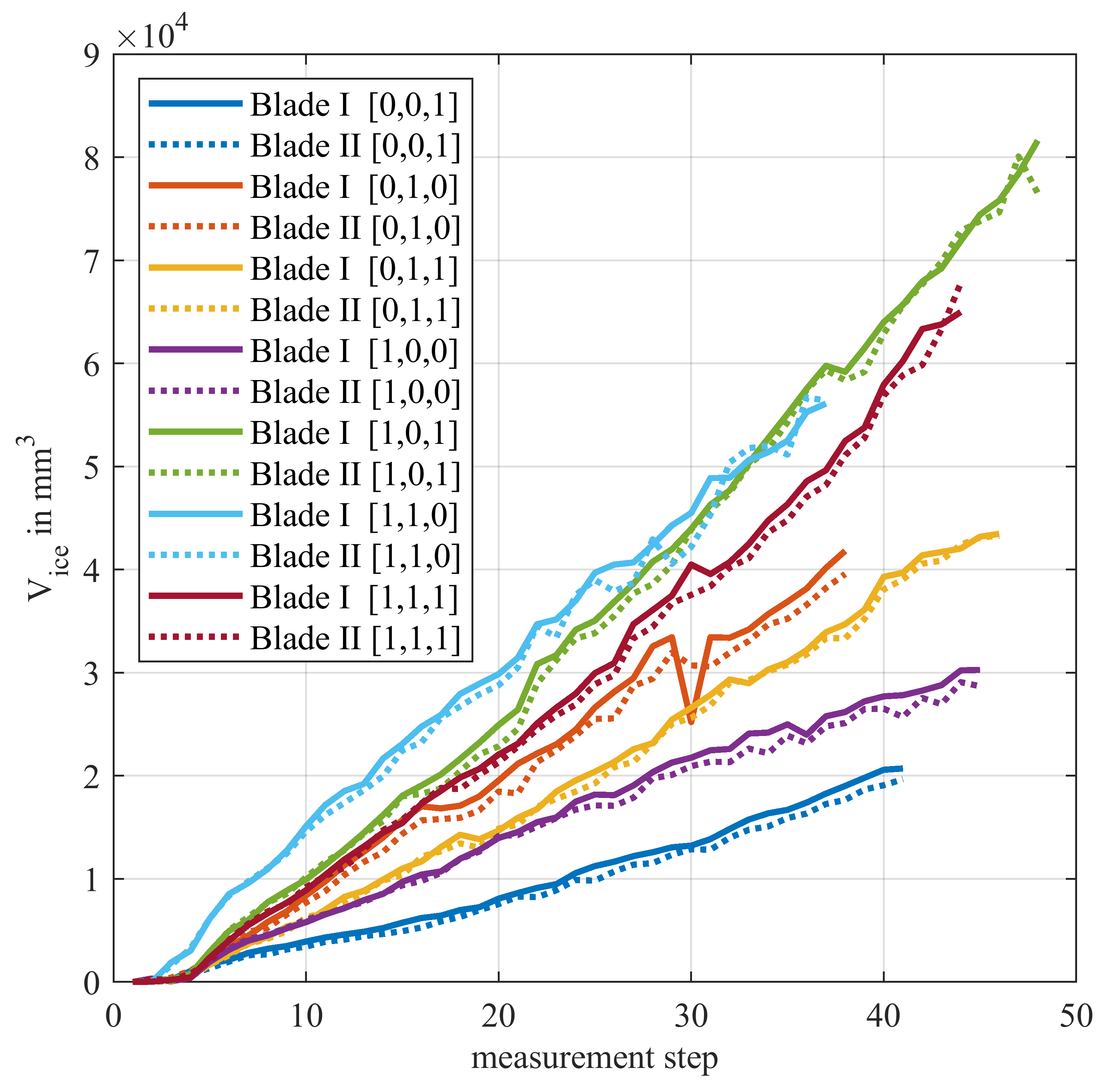

Table 1.
Overview of the conducted measurements (volumes calculated with an offset of -0.5 mm).
| series name | nozzle config. | temperature | rotational velocity | final ice mass | total ice volume | ice density |
|---|---|---|---|---|---|---|
| [°C] | [RPM] | [g] | ||||
| -20C_001 | [0,0,1] | -20 | 100 | 13.5 | 49.762 | 0.271 |
| -20C_010 | [0,1,0] | -20 | 100 | 30.0 | 91.476 | 0.328 |
| -20C_011 | [0,1,1] | -20 | 100 | 31.0 | 96.840 | 0.320 |
| -20C_100 | [1,0,0] | -20 | 100 | 27.0 | 69.478 | 0.389 |
| -20C_101 | [1,0,1] | -20 | 100 | 63.0 | 168.123 | 0.375 |
| -20C_110 | [1,1,0] | -20 | 100 | 44.5 | 122.756 | 0.363 |
| -20C_111 | [1,1,1] | -20 | 100 | 50.0 | 142.904 | 0.350 |
| -10C_001 | [0,0,1] | -10 | 100 | 9.5 | 22.507 | 0.422 |
| -10C_010 | [0,1,0] | -10 | 100 | 25.5 | 42.280 | 0.603 |
| -10C_011 | [0,1,1] | -10 | 100 | 44.0 | 69.572 | 0.632 |
| -10C_100 | [1,0,0] | -10 | 100 | 41.5 | 58.779 | 0.706 |
| -10C_101 | [1,0,1] | -10 | 100 | 52.0 | 77.214 | 0.674 |
| -10C_110 | [1,1,0] | -10 | 100 | 36.0 | 53.844 | 0.669 |
| -10C_111 | [1,1,1] | -10 | 100 | 51.0 | 74.840 | 0.682 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



