
Submitted:
19 July 2024
Posted:
22 July 2024
You are already at the latest version
Abstract
With increasing research focus on industrial anomaly detection, numerous methods have emerged in this domain. Notably, memory bank-based approaches, coupled with kNN distance metrics, have demonstrated remarkable performance in anomaly detection (AD) and anomaly segmentation (AS). However, upon examination of the Back to the Feature (BTF) method applied to the Mvtec-3D AD dataset, it was observed that while it exhibited exceptional segmentation performance, its detection performance was lacking. To address this discrepancy, this study base improves the implementation of BTF, especially the improvement of the anomaly score metric. It posits that different "clusters" necessitate distinct k values in kNN distance metrics. For simplify, this assumption is distilled into the proposition that AD and AS tasks impose differing requirements on the k value in kNN distance metrics. Consequently, the paper introduces the BTM method, which utilizes distinct distance metrics for AD and AS tasks. This innovative approach yields superior AD and AS performance (I-AUROC 93.0%, AURPO 96.9%, P-AUROC 99.5%), representing a substantial enhancement over the BTF method (I-AUROC 5.7% ↑, AURPO 0.5% ↑, P-AUROC 0.2% ↑).
Keywords:
image anomaly detection
; defect detection
; industrial manufacturing
; distance metrics
; anomaly score distribution
1. Introduction
Anomaly detection (AD) aims at finding instances that diverge from the "normal" data in the general sense[1,2,3,4]. Meanwhile, anomaly segmentation (AS) looks into specific anomalous instances and precisely delineates the abnormal regions, such as identifying the locations of abnormal pixels. The combined field of anomaly detection and segmentation (AD&S) plays a critical role in various applications, including industrial inspection, security surveillance, and medical image analysis [3,5,6].
1.1. 2D Industrial Anomaly Detection
When 2D industrial anomaly detection becomes increasingly emphasized, datasets such as MVTec AD [5,6], BTAD [7], MTD [8], and MVTec LOCO AD [9] have been successively introduced. MVTec AD includes various industrial objects and materials with normal and anomalous samples, BTAD focuses on transparent bottle anomalies, MTD targets defects in magnetic tiles, and MVTec LOCOAD evaluates methods under logical constraints and complex scenes. This has stimulated the development of industrial AD&S and facilitated the proposal of many novel AD&S methods. We categorize these methods into three main types:
- Supervised Learning: These algorithms treat anomaly detection as an imbalanced binary classification problem. This approach suffers from the scarcity of abnormal samples and the high cost of labeling. To deal with the problems, various methods were proposed to generate anomalous samples so as to alleviate the labeling cost. For example, CutPaste[10] and DRAEM[11] manually construct anomalous samples; SimpleNet[12] samples anomalous features near positive sample features; NSA[13] and GRAD[14] synthesize anomalous samples based on normal samples. Despite the diversity of anomaly generation methods, they consistently fail to address the underlying issue of discrepancies between the distributions of generated and real data [15,16,17].
- Unsupervised Learning: These algorithms operate under the assumption that the data follow a normal distribution. For example, SROC [18] and SRR [19] rely on this assumption to identify and remove minor anomalies from the normal data. When combined with semi-supervised learning techniques, these algorithms achieve enhanced performance.
-
Semi-supervised Learning: The concentration assumption, which supposes the normal data are usually bounded if the features extracted are good enough, is commonly used when designing semi-supervised learning AD&S methods. These algorithms require only labels for normal data and assume boundaries in the normal data distribution for anomaly detection. Examples include: Autoencoder-based [20,21,22], GAN-based [20,23,24,25], Flow-based[26,27,28,29,30], and SVDD-based [31,32,33]. Some memory bank-based methods (MBBM) [16,17,34,35,36,37] that combine pre-trained features from deep neural networks with traditional semi-supervised algorithms have achieved particularly outstanding results and also possess strong interpretability. In rough chronological order, we summarize the main related algorithms as follows:
- (a)
- (b)
- SPADE, building on DN2, [35] employs Feature Pyramid Matching to achieve image AD&S.
- (c)
- PaDiM [36] models pre-trained feature patches with Gaussian distributions for better AD&S performance.
- (d)
- Panda [33] sets subtasks based on pre-trained features for model tuning, to achieve better feature extraction and improve model performance.
- (e)
1.2. 3D Industrial Anomaly Detection
To fill the gap in the 3D AD&S domain, the MVTec-3D AD [40] dataset along with its corresponding baseline algorithms and performance metrics were released to the public, which introduced new opportunities and challenges to industrial AD&S. In subsequent research, various novel methods have been developed and achieved notable results. These include methods based on teacher-student networks such as 3D-ST [41] and AST [42], methods leveraging the PatchCore scoring function like (Back to the Features) BTF [43] and M3DM [44], and methods focused on constructing anomalies such as 3DSR [45]. Additionally, approaches that utilize Neural Implicit Functions and pre-trained models, exemplified by Shape-Guided [46], have been introduced. These studies primarily aim to design new methods for 3D feature extraction and feature integration.
In the MVTec-3D AD dataset, it was observed that BTF achieved significant performance in terms of AS, but lagged in AD performance. Upon further investigation, it was found that methods such as ReConPatch, BTF, and M3DM perform anomaly scoring calculations based on the PatchCore method. These algorithms differ significantly from the initially proposed image domain anomaly scoring algorithm based on kNN [34] and the traditional kNN classification algorithm [47]. The papers lacked specific discussion when introducing these differences. In this paper, the distance measures involved in these algorithms are compared and analyzed, and their advantages and disadvantages are pointed out. According to these advantages and disadvantages, combined with our improvement of the existing MBBM method, we propose a method that uses different anomaly scores in the AD and AS phases, respectively.
1.3. Evaluation Metrics
In this study, we use several key evaluation metrics to assess the performance of our proposed method, including I-AUROC[5,6], P-AUROC[5,6], and AUPRO[6,43,44].
- I-AUROC (Instance-based AUROC): This metric measures the AUROC at the instance level, which is crucial for image anomaly detection. It calculates the AUROC value for each image or object, providing an evaluation of the model’s performance on individual instances. The formula is:where N is the number of instances, is the true label of instance i, and is the predicted probability for instance i.
- P-AUROC (Pixel-based AUROC): This metric calculates the AUROC at the pixel level, which is essential for evaluating the performance of anomaly segmentation tasks. It considers the predictions and true labels of each pixel within the images. The formula is:where M is the total number of pixels, is the true label of pixel j, and is the predicted probability for pixel j.
- PRO (Per-region Overlap): This metric evaluates the overlap between predicted anomaly regions and ground truth regions, specifically for anomaly segmentation. The formula is:where K is the number of anomaly regions, is the predicted k-th anomaly region, and is the ground truth k-th anomaly region. PRO considers the size and location of anomaly regions, making it useful for evaluating segmentation performance.
- AUPRO (Area Under the PRO Curve): This metric evaluates the performance of anomaly segmentation by calculating the area under the PRO curve. PRO measures the overlap between predicted and ground truth anomaly regions. The formula is:where T represents different thresholds, and is the PRO score at threshold T. AUPRO is similar to AUROC but is specifically designed for anomaly segmentation tasks, summarizing the model’s performance across different thresholds.
In the field of industrial anomaly detection, our work primarily focuses on the I-AUROC as the key performance metric, with AUPRO as the secondary metric. For practical applications, especially when emphasizing model performance at lower false positive rates (FPR), we often set an upper limit for AUPRO integration. By choosing 0.3 as the upper limit, we calculate the area under the PRO curve only for FPR between 0% and 30%.
1.4. Contributions and Paper Organization
The key contributions of this work include:
- Methodological Clarification (PatchCore and BTF): We compare and analyze the theoretical framework and official implementation of PatchCore and BTF, then make improvements to some details found in the paper or code, while clarifying the framework of BTM.
- Distance Metric Analysis: We visualized and analyzed the distance measure in the anomaly scoring algorithm, providing initial insights into its strengths and weaknesses. Based on these analyses, we also propose some assumptions.
- Method Proposed: On the basis of BTF, a method named Back to the Metrics (BTM) is proposed in Section 2.1, which achieves the performance improvement of (I-AUROC 5.7% ↑, AURPO 0.5% ↑, and P-AUROC 0.2% ↑). It is also competitive against other leading methods.
This paper is divided into three parts:
- Section 2 optimizes the nearest neighbor feature fusion, feature alignment and distance metric based on BTF, and proposes the BTM method. Then, the basis of modification is introduced, including a summary of the framework of MBBM method, and an analysis of the implementation details of MBBM (anomaly score calculation, feature fusion and downsampling method).
- Section 4 summarizes the conclusions drawn in this work and explores future research directions.
2. Methodology
2.1. Back to the Metric
2.1.1. Framework
This section describes the general framework of BTM method through the summary of MBBM method.
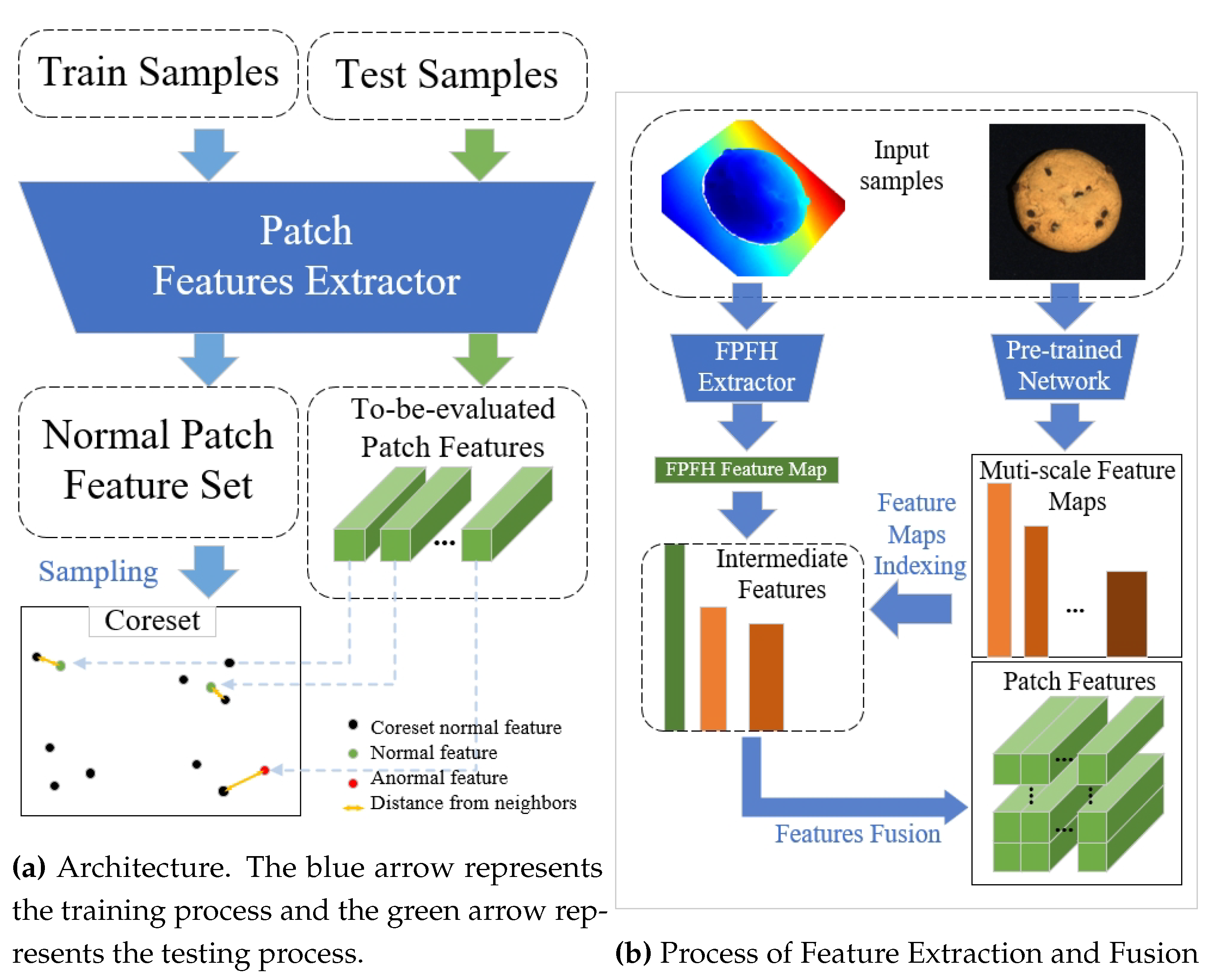
In BTM, we have followed the traditional framework of MBBM framework illustrated in Figure 1. Specifically, Figure 1 is dedicated to introducing MBBM. For methods focused solely on anomaly detection (AD), it can be elucidated that the Patch Features Extractor (PFE) extracts only one feature for each sample. In other words, such methods treat the entire image as a single patch. Figure 1 shows the feature extraction process of BTM method on MVTec-3D AD dataset. The process depicted is consistent with BTF, with variations noted in Section 3.3and Section 2.1.2.
2.1.2. Optimization
On the framework shown in Figure 1, we opt to use kNN Squared Distance Mean Metrics as the anomaly score calculation function for AS tasks, and employ nearest neighbor Metrics to compute image-level anomaly scores. We term this approach BTM and conduct AD&S experiments on the MVTec-3D AD dataset.
Building upon BTF, we referenced DN2’s work on GAD and, considering the alignment requirements between images and features, utilized a mean convolution kernel with kernel-size=3, stride=1, and padding=1 to fuse neighboring features. For the sake of logical correctness and code parallelism, we replaced the elliptical Gaussian blur kernel used in computing AS anomaly scores with a Gaussian blur kernel of kernel-size=15 and sigma=(4,4), directly applicable to tensors. We’ll get into the details of why these changes were made in a later section.
2.2. The Structure of Memory Bank Based Methods(MBBM)
2.2.1. Anomaly Score Metrics
Traditional kNN algorithm is a classification algorithm based on similarity metrics. It determines the category of a new sample by selecting kNN to vote, where k is usually chosen as an odd number to avoid ties during the voting process[47]. In semi-supervised anomaly detection, anomalous samples do not appear in the training set. In contrast, the MBBM considers the influence of multiple different normal samples in the anomaly scoring function through techniques like re-weighting.
DN2 is the first model to introduce a kNN-based method in industrial image anomaly detection, scoring image anomalies using Equation 5.
The symbol represents the set of k nearest feature vectors to within the training set . The anomaly score s of the test image is denoted by the distance function , which is the average sum of squared Euclidean distances between the feature vector and the feature vectors f in its kNN . The rule with is commonly referred to as the nearest-neighbor rule.[47]
Work such as SPADE further extends DN2 to AS tasks. For an image sample that is divided into I rows and J columns: represents the feature extracted from the patch at the ith row and jth column, and
represents the set of features for the entire image; let represent the anomaly score of the patch at the ith row and jth column; let represent the coreset of features obtained by applying a greedy algorithm for subsampling on the set of patch features from all images in the training set; let represent the set of k nearest features to in .
For each image, PatchCore’s official code uses Equation 6 for AS anomaly score calculation, where in the paper, which can be represented by Equation 7.
PatchCore defines the maximum distance score of a test image, which can be expressed as Equation 8 or more closely to the original text as Appendix A (less rigorous). Here, is the feature in the test image with the highest anomaly score, and is the feature in the core set that is nearest to .
It is noteworthy that, in conjunction with the understanding of Equation 7 and Equation 8, we propose that the terms and in Equation A1 and Equation A2 need to be redefined as shown in Equation 9. Here, represents the nearest neighbor of within , and denotes the set composed of tuples, each consisting of all patch features from an image and their respective nearest neighbors in .
To make the image anomaly scoring results more robust [37], PatchCore employs the weights w from Equation 10 to reweight as the anomaly score, as shown in Equation 11. BTF and M3DM both implemented Equation 10 in their code, but M3DM employed complex methods such as reweighting and One-Class Support Vector Machines for anomaly score re-calculation.
To facilitate further analysis, we define partial component factors (or terms) and of the variable w as shown in Equation 12. The exponential function and the square root function are monotonically increasing and therefore not specifically considered.
In the analysis of , the terms , , and can have adverse effects on the contour plots of the anomaly scores. These factors can lead to distortions in the visualization, making it challenging to accurately interpret the results. The impact of these terms on the anomaly contour plots is illustrated in Figure 4, Figure 5 and Figure 6.
2.2.2. Feature Fusion
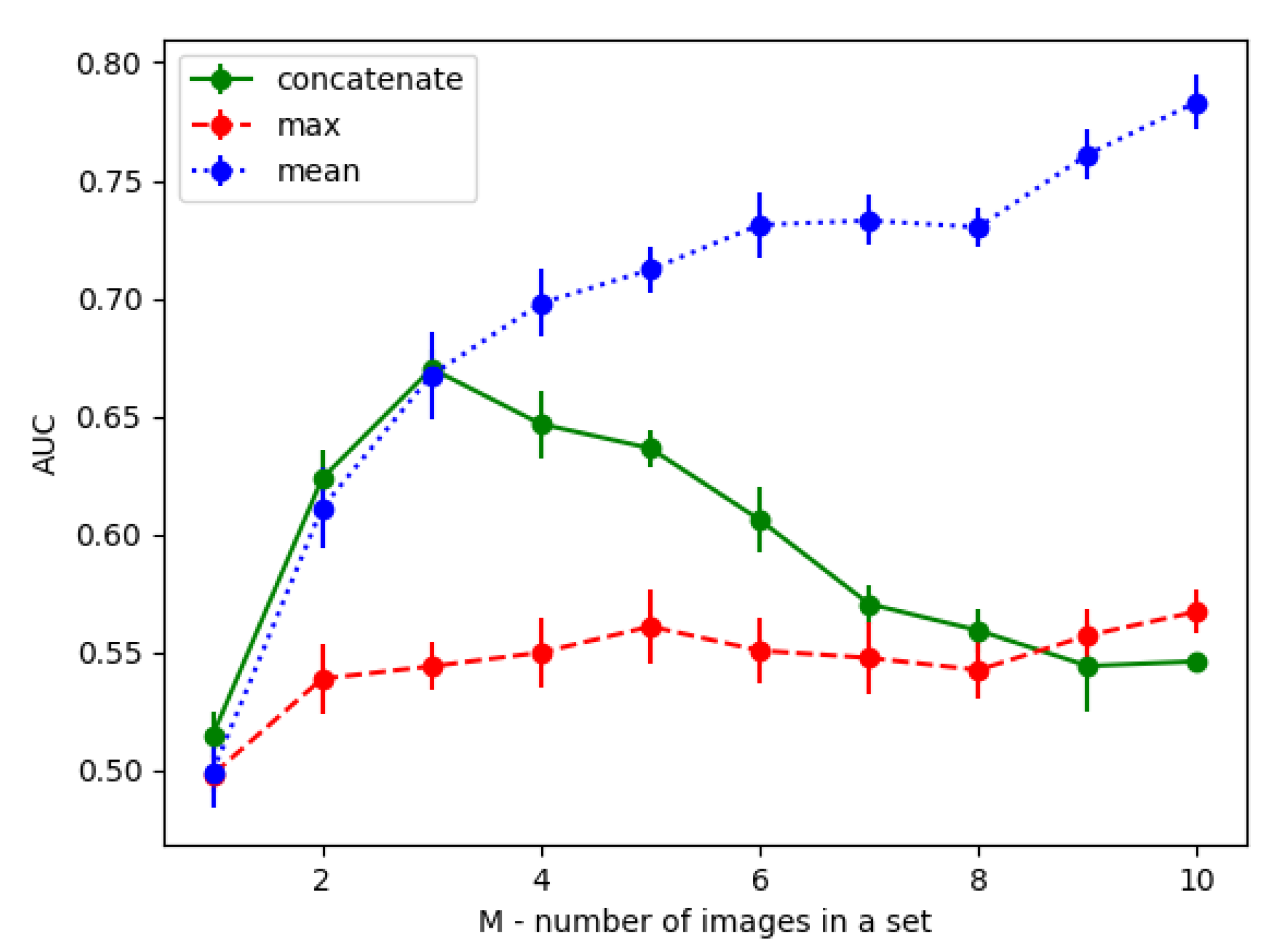
In pure image anomaly detection (AD) tasks, the issue of feature fusion is not inherently involved. However, DN2 explored it as a GAD problem: as shown in Figure 2, DN2 compared three methods of feature fusion—concatenate, max, and mean—and found that using mean for feature fusion combined with the kNN anomaly score calculation algorithm resulted in the best ROCAUC performance. In contrast, the performance of the concatenate method in terms of ROCAUC first increased and then decreased with the enlargement of the group size. This experiment offers some inspiration for feature fusion methods in subsequent work.
In the anomaly score (AS) of methods derived from PatchCore, two variants of feature fusion appear: 1) On the MVTec-3D AD dataset, the PatchCore code upsamples the high-level feature map to the same resolution as the low-level features using bilinear interpolation, then maps different levels to the same dimension (e.g., hyperparameter 1024), concatenates them together, and finally maps them to a feature vector of a specific dimension. 2) On 3D datasets, BTF and M3DM first use the mean method to perform domain feature fusion for different layer features (including RBB multi-scale features and geometric features), then the high-level feature map is upsampled to the same resolution as the low-level features using bilinear interpolation, and finally, the features from all layers are concatenated together to generate a feature vector.
Overall, the fusion of features from the same modality, such as the fusion of features from the same spatial domain, can be approached as a GAD problem, where using the mean method can yield better performance, especially when many features are involved. On the other hand, for the fusion of features from different modalities, including different scales and different characteristics, concatenation is a more common choice. More sophisticated and complex feature fusion techniques, such as those used by M3DM, are beyond the scope of this discussion.
Referring to DN2’s work on GAD, in BTM we make the mean convolution kernel of size 3 and step 1 perform neighbor feature fusion, which is the same as in BTF. The difference is, given the feature alignment, we add a padding of size 1 to the convolution kernel. For features other than nearest neighbor features, we simply use concatenate as a feature fusion method.
2.2.3. The Iterative Greedy Approximation Algorithm
Both PatchCore and BTF utilize the Iterative Greedy Approximation (IGA) algorithm [48] to subsample the memory bank. IGA significantly addresses the issue of overemphasis on outlier samples in both active learning and anomaly detection scenarios. This method ensures the coverage, representativeness, and information complexity of the coreset samples. However, it is worth noting that in active learning, the normalcy of outliers is not a primary concern, whereas in anomaly detection, it is important.
The IGA algorithm tends to collect samples at the edges of sample clusters, typically high-frequency samples around low-frequency regions. Based on this characteristic of the IGA algorithm, we have the following assumptions:
Assumption 1.
If there are abnormal samples in the training set, they are likely to be captured by IGA and become outliers (considered normal) in the core set.
Assumption 2.
The low-frequency areas near high-frequency features (The boundary of the sample cluster), data points are likely to be outliers and should receive higher anomaly scores.
2.3. Visualization Analysis of Different Metrics
In MBBM, the interaction between the anomaly score calculation function and feature engineering ultimately affects the calculation of anomaly scores. In existing research on image anomaly detection, the evaluation of anomaly score calculation functions is typically manifested as performance metrics on specific datasets. However, this is far from sufficient [49]. Considering the inherent flaws of real datasets and the significant impact of complex variable interactions on results, we simulate sample distributions in two-dimensional space to facilitate the visual analysis of anomaly score functions.
As shown in Equation 13, this study uses and to respectively denote one-dimensional grid vectors along the x and y axes within the visualization region (), and employs to represent the two-dimensional spatial vector for visualization. The values , , , and are manually input to define the visualization range. We employ random sampling within the Grid to generate a core set , and subsequently visualize the gradient of anomaly scores within the range.
The set denotes the Euclidean distance between the points in and points c in . By substituting into the corresponding formula, one can obtain the anomaly score or anomaly score weights Z, which are ultimately used to draw contours. Both and the anomaly scores can be obtained through parallel computation.
2.3.1. k-Nearest Neighbor Squared Distance Mean
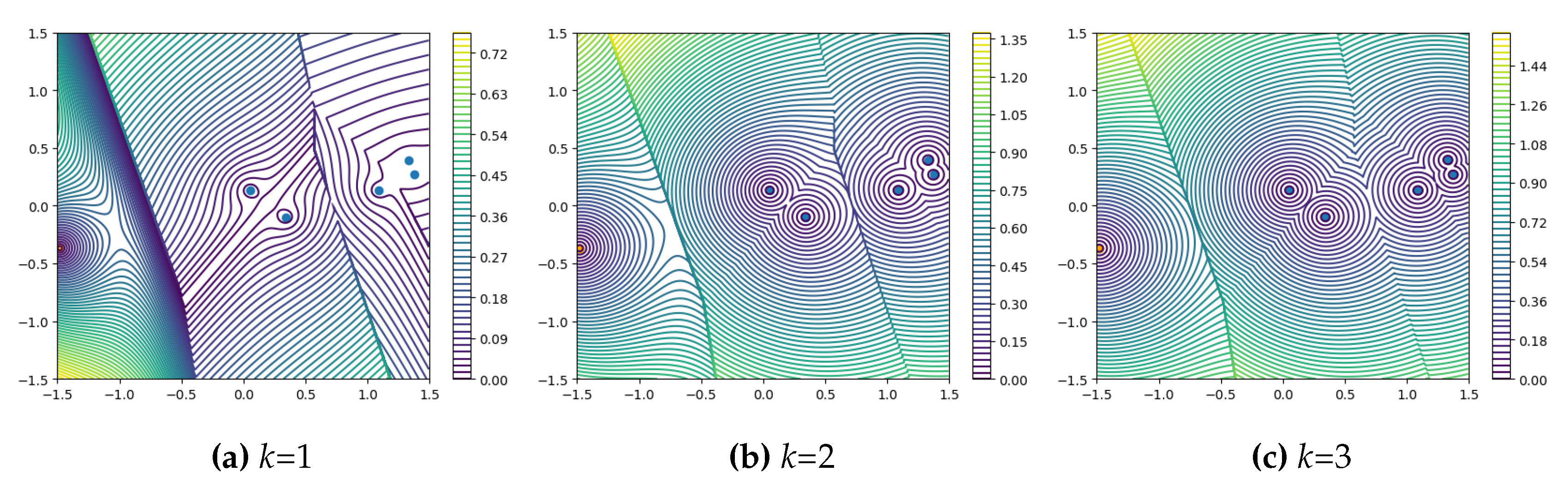
When , as shown in Figure 3a, the algorithm ensures adequate sample coverage and representativeness. As k increases, as illustrated in Figure 3, the coverage and representativeness of outlier points significantly decrease, while the robustness of the anomaly score calculation function to outlier points slightly improves.
Larger k values can increase the robustness of the model and reduce the influence of outliers, but at the expense of sample representativeness and coverage. When k>1, we see a score distribution that conforms to Assumption 2. When the number of test samples is large enough and most of them are normal, it is a good choice to increase the k value appropriately to increase the robustness of the abnormal samples that may be introduced by Assumption 1. This fits the scenario of the AS task.
Figure 3.
Contour plots of Equation 6 for anomaly scores under simulated coreset with different values of k. Orange dots represent outliers.
Figure 3.
Contour plots of Equation 6 for anomaly scores under simulated coreset with different values of k. Orange dots represent outliers.
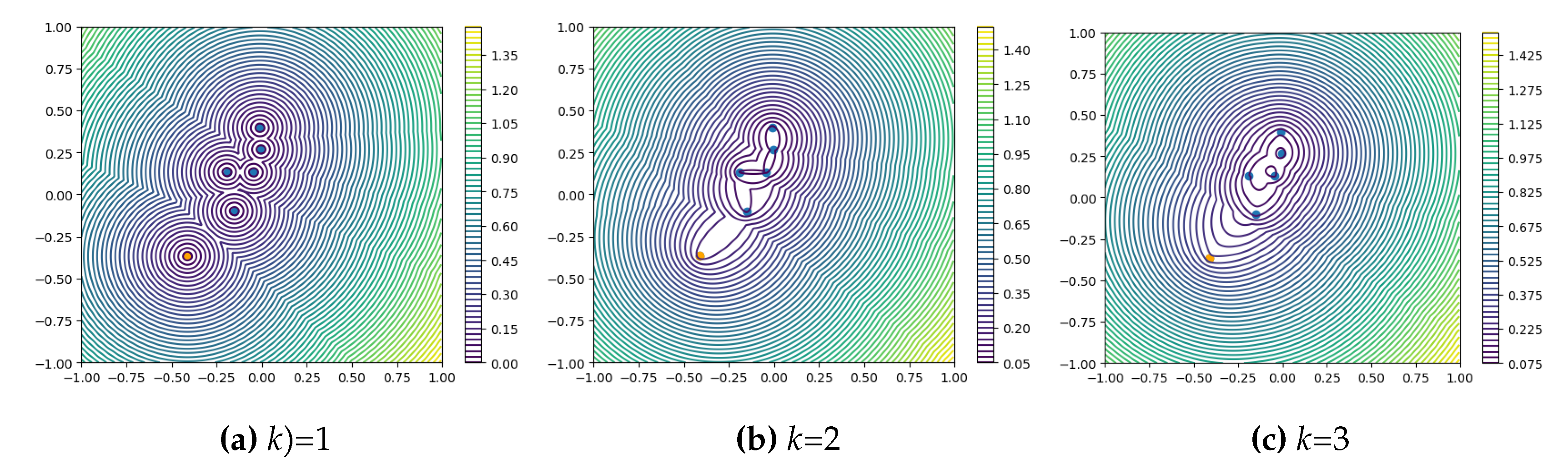
However, as we can see from the graph Figure 3b, when k increases, there will be many "gullies" in the gradient plot of the abnormal fraction function. These "gullies" exist regardless of whether the outliers are normal or abnormal. Samples located in gullies will be assigned the same anomaly scores, losing their ability to distinguish anomalies. When Patch Core and BTF process AD tasks, the patch with the highest anomaly score plays a decisive role. In cases where a known sample is likely to be an anomaly (has a high probability of not being affected by outliers and reducing the anomaly score), the presence of these gullies is not conducive to the recall of anomalies.
To sum up, MBBM uses k-nearest Neighbor Squared Distance Mean to measure the k value that may be needed for processing AS tasks. It is best to keep k=1 when processing AD tasks.
2.3.2. PatchCore Anomaly Score Calculation Function
The function composition of resembles Softmax. As shown in Figure 4, has larger values at the boundaries of the sample coverage area. As k increases, the maximum value of first decreases rapidly and then decreases slowly, approximately inversely proportional to k. Combining Equation 11 and Equation 12, we can observe that as k increases, the weight w tends to approach 1, and the influence of distance variance on the final anomaly score decreases.
Figure 4.
Contour plots of the of Equation 12 under simulated coreset with different values of k. Orange dots represent outliers.
Figure 4.
Contour plots of the of Equation 12 under simulated coreset with different values of k. Orange dots represent outliers.
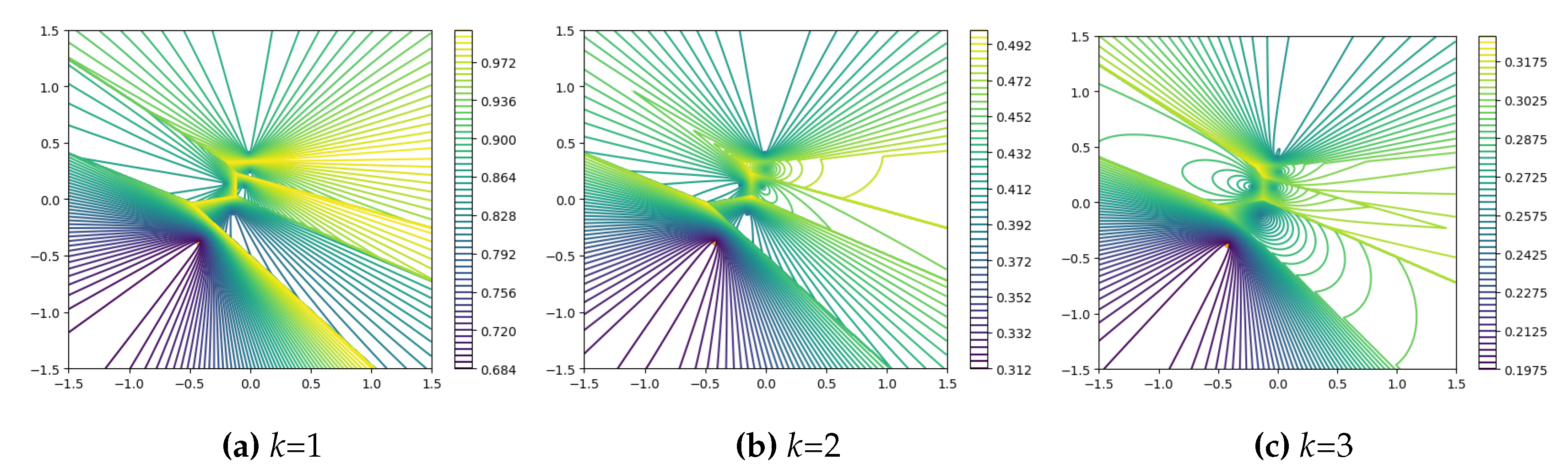
Figure 5 and Figure 6 illustrate the behavior of s and w in Equation 11. w increases with the increase of k, while its factor decreases significantly. Except for Figure 5a, which exhibits a bizarre distribution of anomalies due to excessive influence from , assuming a randomly distributed sample set, both Figure 5a and Figure 5a are relatively reasonable: they conform to Assumption 2. If the outliers in the normal samples are marginal samples of this cluster, the gradient of anomaly scores on the outlier side is larger.
In other words, w induces a subtle merging phenomenon in the distribution of anomaly scores for the k nearest neighbors of each point. This has adverse effects on the distribution of anomaly scores for clusters with a size less than or equal to k.
As shown in Figure 7b, when , the distribution of anomaly scores around the cluster composed of 3 sample points on the right side of the image does not exhibit significant inward shifting, forming a closed whole. Around the cluster composed of 2 sample points in the middle, a slight phenomenon of shifting towards the right side appears. While around the cluster composed of 1 sample point on the left side, there is a clear tendency for merging towards the right side. All clusters shown in Figure 7b exhibit slight merging phenomena. These merging or shifting phenomena are inconsistent with our assumptions.
Figure 5.
Contour plots of Equation 11 for anomaly scores under simulated coreset with different values of k. Orange dots represent outliers.
Figure 5.
Contour plots of Equation 11 for anomaly scores under simulated coreset with different values of k. Orange dots represent outliers.
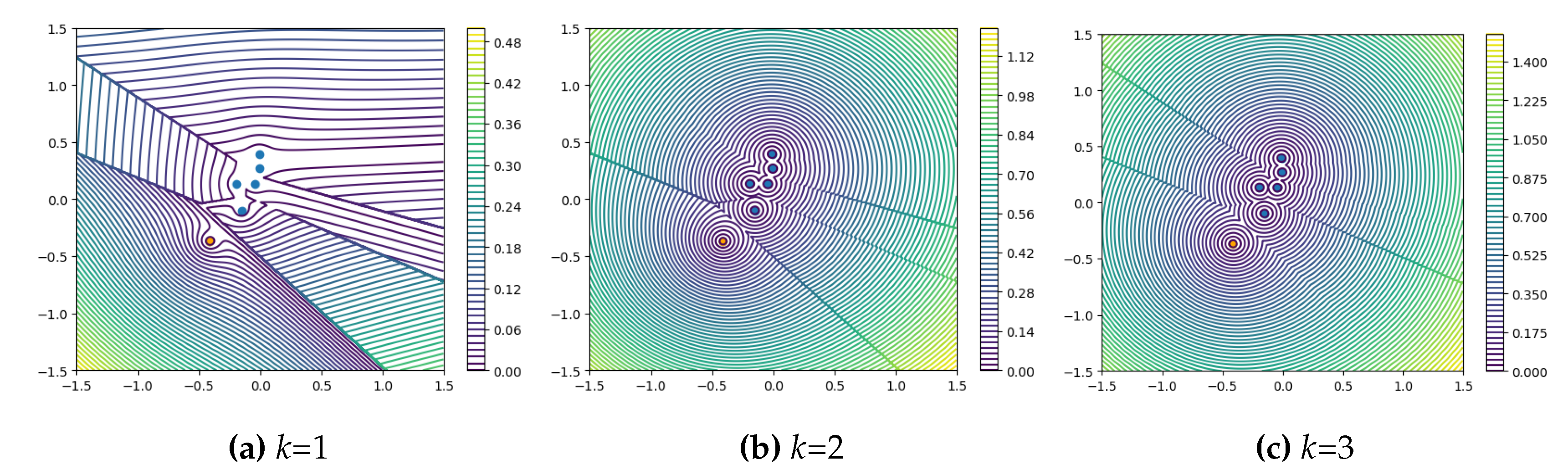
Figure 6.
Contour plots of the weight values of Equation 11 under simulated coreset with different values of k. Orange dots represent outliers.
Figure 6.
Contour plots of the weight values of Equation 11 under simulated coreset with different values of k. Orange dots represent outliers.
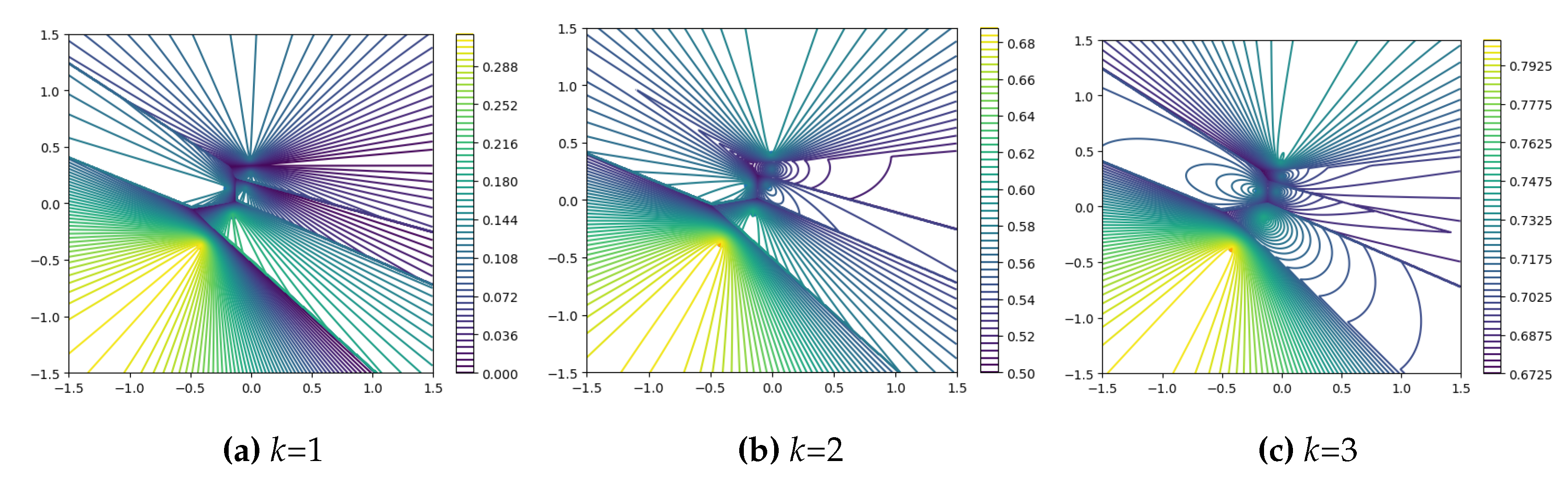
Figure 7.
Enlarge the abscissa of the six samples in the coreset in Figure 5 by a factor of 7, dividing them into three clusters consisting of 1, 2, and 3 points, respectively, assuming they are samples sampled from the edges of three distribution clusters.(Here, this is to facilitate the manual grouping of samples and magnify certain details. In reality, the samples would have thousands of dimensions, with the same issue present in each dimension.)
Figure 7.
Enlarge the abscissa of the six samples in the coreset in Figure 5 by a factor of 7, dividing them into three clusters consisting of 1, 2, and 3 points, respectively, assuming they are samples sampled from the edges of three distribution clusters.(Here, this is to facilitate the manual grouping of samples and magnify certain details. In reality, the samples would have thousands of dimensions, with the same issue present in each dimension.)
2.3.3. Summarize
In summary, the k-Nearest Neighbor Squared Distance Mean Score Calculation Function has obvious drawbacks when , but it exhibits better universality when . In most cases, particularly when it is highly probable that the sample is anomalous (anomaly detection tasks generally use the highest anomaly score sample from anomaly segmentation for further anomaly score calculation), this method does not produce the extreme errors seen in previous reweighting methods. The PatchCore Anomaly Score Calculation Function can have better distribution patterns of anomaly scores in certain situations, but it imposes stringent requirements on the sampling method and the distribution of sampling results. When using the kNN distance metric to calculate the anomaly score, k needs to be smaller than the number of samples in the cluster, and the anomaly detection performance is best when k is close to the number of samples in the cluster. Accounting for the above visual analysis results, as shown in Equation 14, we define memory bank as a set consisting of many clusters , each of which consists of kNN samples. In the equation, d should be defined based on empirical observations. Choosing a suitable k for each cluster in the anomaly scoring phase is noteworthy. However, for computational and implementation convenience, we simply assume that the k values of in close to the abnormal samples of the test set are small, while the k values of other are large.
We pay more attention to abnormal samples in the anomaly detection (AD) task, while normal samples are predominant in the anomaly scoring (AS) task. Therefore, we should set different values of k for anomaly score calculation in AD and AS. Specifically, a smaller k value is designed for AD anomaly score calculation, and a larger k value is designed for AS anomaly score calculation.
3. Experiments
3.1. Datasets
The MVTec AD dataset is a comprehensive benchmark dataset for evaluating anomaly detection algorithms in industrial inspection scenarios. It consists of over 5,000 high-resolution color images across 15 different object and texture categories. The dataset includes both normal images for training and validation, as well as anomalous images for testing, with various types of real-world defects such as scratches, dents, and contaminations. The objects and textures in the dataset exhibit a range of complexities and challenges for anomaly detection, making it a valuable resource for developing and assessing the performance of unsupervised and semi-supervised anomaly detection methods in the context of manufacturing and quality control[5,6].
The MVTec-3D AD dataset comprises 4,147 high-resolution industrial 3D scans across 10 object categories. It includes anomaly-free scans for training and validation, as well as test samples with various real-world anomalies like scratches, dents, and contaminations. The objects range from those with natural variations (bagel, carrot, cookie, peach, potato) to standardized but deformable ones (foam, rope, tire) and rigid ones (cable gland, dowel). The dataset is designed for unsupervised anomaly detection in industrial inspection scenarios, featuring 41 types of anomalies[40].
3.2. Evaluation Metrics
3.3. Implementation Details
Our experiments were primarily conducted on the official GitHub repositories of PatchCore and BTF. Except for experimental variables and specifically mentioned parameters, all other parameters remained the same as the official defaults. Even during the performance comparison process, we abandoned many performance optimization techniques, with significant potential performance improvements.
When comparing the performance of AD&S on the MVTec-3D AD dataset using the BTM method with other approaches, we employed the parameter as recommended in the PatchCore paper for the AS task in kNN squared distance mean metrics.
3.4. Performance Comparison
3.4.1. Anomaly Detection on MVTec-3D AD
To compare the anomaly detection (AD) performance, we evaluated BTM against several 3D, RGB, and RGB + 3D multimodal methods on the MVTec-3D dataset. As shown in Table 1, under the RGB + 3D multimodal setting, BTM exhibited an average AD performance improvement of 5.7% compared to the previous BTF method; this advantage was also observed in each individual category. In the RGB and 3D modalities, BTM achieved average performance improvements of 3.1% and 3.9%, respectively, over BTF; again, this improvement was consistent across each category.
We also replicated M3DM using the code and corresponding model parameters from the official GitHub repository. In comparing our results with the replication, our method demonstrated strong competitiveness overall. Specifically, in the RGB + 3D multimodal setting, BTM outperformed M3DM by 0.4%, achieving a performance of 93%. It is worth noting that unlike M3DM, we did not use manually designed foreground templates, leaving significant room for further AD performance enhancement. We prefer to validate the model by preserving the foreground and background to ensure its robustness.
3.4.2. Anomaly Segmentation on MVTec-3D AD
To compare the anomaly scoring (AS) performance, we evaluated BTM against several 3D, RGB, and RGB + 3D multimodal methods on the MVTec-3D dataset. As shown in Table 2, under the RGB + 3D multimodal setting, BTM achieved an average AUPRO performance of 96.9%, surpassing M3DM and BTF by 0.8% and 0.5%, respectively. This superiority was also evident when examining individual categories. In the RGB and 3D modalities, BTM outperformed BTF. It also shows strong competitiveness compared to other methods.
On the MVTec-3D dataset, BTM achieved an average P-AUROC performance of 99.5%, surpassing BTF and M3DM by 0.5% and 0.2%, respectively. Detailed P-AUROC performance comparisons are provided in Table 3.
Similarly, as we did not utilize manually designed foreground templates like M3DM or 3D-ST, we believe there is substantial room for AS performance improvement.
3.5. Performance of kNN Reweight Metrics on BTF
We conducted experiments on computing AD anomaly scores using BTF with a kNN reweighting approach (Equation 11) on the MVTec-3D AD dataset. As shown in Figure 8, the AD performance is lowest when k=1. Subsequently, as k increases, the influence of weight w decreases, and the AD performance gradually approaches our optimal performance.
3.6. Performance of k Squared Distance Mean Metrics on BTF
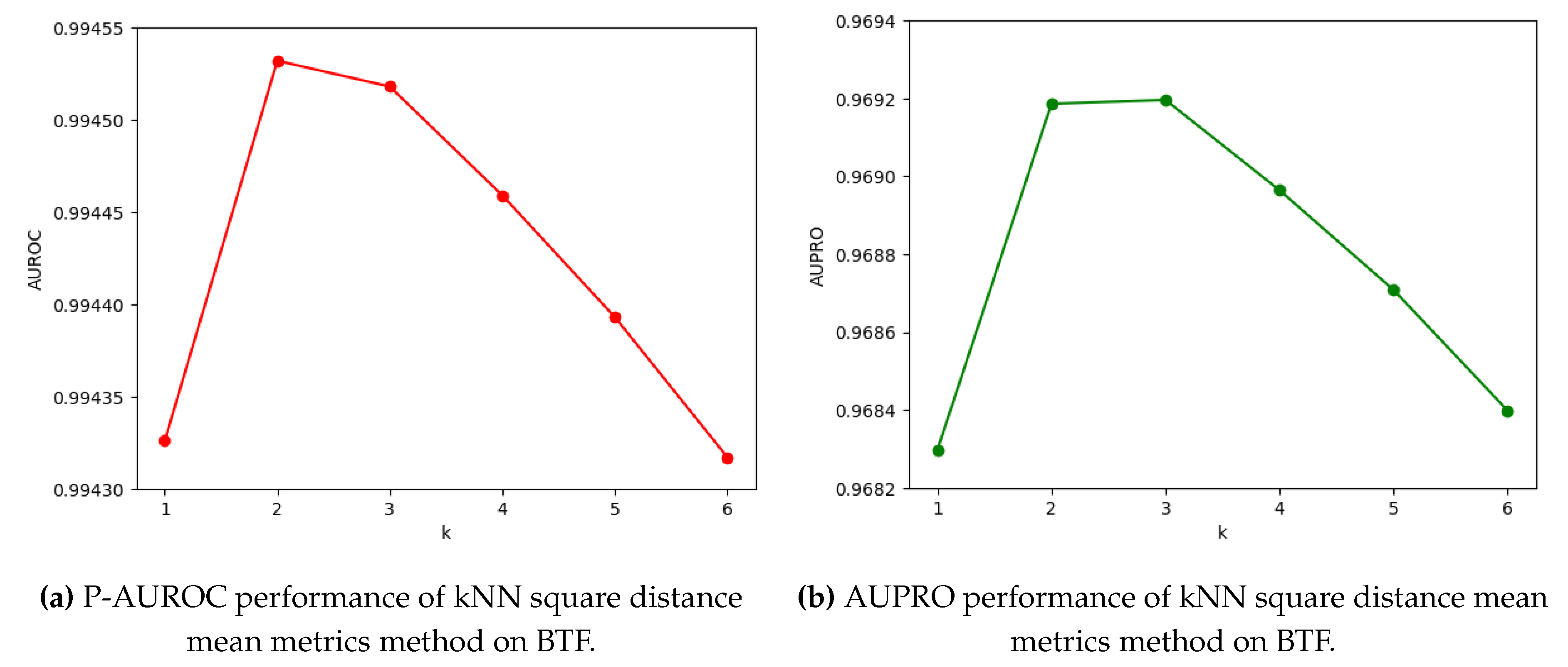
We conducted experiments on computing AS anomaly scores based on kNN Squared Distance Mean Metrics using BTF on the MVTec-3D AD dataset. As shown in Figure 9, when k=1, the performance of P-AUROC and AUPRO is the lowest, and then, with the increase of k, the performance of P-AUROC and AUPRO reaches the maximum at k=2 and k=3 respectively, and then starts to decrease.

Table 1.
I-AUROC score for anomaly detection of all categories of MVTec-3D AD.Our method clearly outperforms other methods in 3D + RGB setting and get 0.930 mean I-AUROC score.
Table 1.
I-AUROC score for anomaly detection of all categories of MVTec-3D AD.Our method clearly outperforms other methods in 3D + RGB setting and get 0.930 mean I-AUROC score.
| Method | Bagel | Cable Gland | Carrot | Cookie | Dowel | Foam | Peach | Potato | Rope | Tire | Mean | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3D | Depth GAN [40] | 0.538 | 0.372 | 0.580 | 0.603 | 0.430 | 0.534 | 0.642 | 0.601 | 0.443 | 0.577 | 0.532 |
| Depth AE [40] | 0.648 | 0.502 | 0.650 | 0.488 | 0.805 | 0.522 | 0.712 | 0.529 | 0.540 | 0.552 | 0.595 | |
| Depth VM [40] | 0.513 | 0.551 | 0.477 | 0.581 | 0.617 | 0.716 | 0.450 | 0.421 | 0.598 | 0.623 | 0.555 | |
| Voxel GAN [40] | 0.680 | 0.324 | 0.565 | 0.399 | 0.497 | 0.482 | 0.566 | 0.579 | 0.601 | 0.482 | 0.517 | |
| Voxel AE [40] | 0.510 | 0.540 | 0.384 | 0.693 | 0.446 | 0.632 | 0.550 | 0.494 | 0.721 | 0.413 | 0.538 | |
| Voxel VM [40] | 0.553 | 0.772 | 0.484 | 0.701 | 0.751 | 0.578 | 0.480 | 0.466 | 0.689 | 0.611 | 0.609 | |
| 3D-ST | 0.862 | 0.484 | 0.832 | 0.894 | 0.848 | 0.663 | 0.763 | 0.687 | 0.958 | 0.486 | 0.748 | |
| M3DM [44] | 0.941 | 0.651 | 0.965 | 0.969 | 0.905 | 0.760 | 0.880 | 0.974 | 0.926 | 0.765 | 0.874 | |
| FPFH(BTF) [43] | 0.820 | 0.533 | 0.877 | 0.769 | 0.718 | 0.574 | 0.774 | 0.895 | 0.990 | 0.582 | 0.753 | |
| FPFH(BTM) | 0.939 | 0.553 | 0.916 | 0.844 | 0.823 | 0.588 | 0.718 | 0.928 | 0.976 | 0.633 | 0.792 | |
| RGB | PatchCore [44] | 0.876 | 0.880 | 0.791 | 0.682 | 0.912 | 0.701 | 0.695 | 0.618 | 0.841 | 0.702 | 0.770 |
| M3DM [44] | 0.944 | 0.918 | 0.896 | 0.749 | 0.959 | 0.767 | 0.919 | 0.648 | 0.938 | 0.767 | 0.850 | |
| RGB iNet(BTF) [43] | 0.854 | 0.840 | 0.824 | 0.687 | 0.974 | 0.716 | 0.713 | 0.593 | 0.920 | 0.724 | 0.785 | |
| RGB iNet(BTM) | 0.909 | 0.895 | 0.838 | 0.745 | 0.975 | 0.714 | 0.79 | 0.605 | 0.93 | 0.759 | 0.816 | |
| RGB+3D | Depth GAN [40] | 0.530 | 0.376 | 0.607 | 0.603 | 0.497 | 0.484 | 0.595 | 0.489 | 0.536 | 0.521 | 0.523 |
| Depth AE [40] | 0.468 | 0.731 | 0.497 | 0.673 | 0.534 | 0.417 | 0.485 | 0.549 | 0.564 | 0.546 | 0.546 | |
| Depth VM [40] | 0.510 | 0.542 | 0.469 | 0.576 | 0.609 | 0.699 | 0.450 | 0.419 | 0.668 | 0.520 | 0.546 | |
| Voxel GAN [40] | 0.383 | 0.623 | 0.474 | 0.639 | 0.564 | 0.409 | 0.617 | 0.427 | 0.663 | 0.577 | 0.537 | |
| Voxel AE [40] | 0.693 | 0.425 | 0.515 | 0.790 | 0.494 | 0.558 | 0.537 | 0.484 | 0.639 | 0.583 | 0.571 | |
| Voxel VM [40] | 0.750 | 0.747 | 0.613 | 0.738 | 0.823 | 0.693 | 0.679 | 0.652 | 0.609 | 0.690 | 0.699 | |
| M3DM* | 0.998 | 0.894 | 0.96 | 0.963 | 0.954 | 0.901 | 0.958 | 0.868 | 0.962 | 0.797 | 0.926 | |
| BTF [43] | 0.938 | 0.765 | 0.972 | 0.888 | 0.960 | 0.664 | 0.904 | 0.929 | 0.982 | 0.726 | 0.873 | |
| BTM | 0.980 | 0.860 | 0.980 | 0.963 | 0.978 | 0.726 | 0.958 | 0.953 | 0.980 | 0.926 | 0.930 |
* Denotes results obtained by employing pre-trained parameters provided by the original studies. Unannotated results are directly excerpted from the corresponding literature.
Table 2.
AUPRO score for anomaly detection of all categories of MVTec-3D AD.Our method outperforms other methods in 3D + RGB setting and get 0.969 mean AUPRO score.
Table 2.
AUPRO score for anomaly detection of all categories of MVTec-3D AD.Our method outperforms other methods in 3D + RGB setting and get 0.969 mean AUPRO score.
| Method | Bagel | Cable Gland | Carrot | Cookie | Dowel | Foam | Peach | Potato | Rope | Tire | Mean | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3D | Depth GAN[40] | 0.111 | 0.072 | 0.212 | 0.174 | 0.160 | 0.128 | 0.003 | 0.042 | 0.446 | 0.075 | 0.143 |
| Depth AE[40] | 0.147 | 0.069 | 0.293 | 0.217 | 0.207 | 0.181 | 0.164 | 0.066 | 0.545 | 0.142 | 0.203 | |
| Depth VM[40] | 0.280 | 0.374 | 0.243 | 0.526 | 0.485 | 0.314 | 0.199 | 0.388 | 0.543 | 0.385 | 0.374 | |
| Voxel GAN[40] | 0.440 | 0.453 | 0.875 | 0.755 | 0.782 | 0.378 | 0.392 | 0.639 | 0.775 | 0.389 | 0.583 | |
| Voxel AE[40] | 0.260 | 0.341 | 0.581 | 0.351 | 0.502 | 0.234 | 0.351 | 0.658 | 0.015 | 0.185 | 0.348 | |
| Voxel VM[40] | 0.453 | 0.343 | 0.521 | 0.697 | 0.680 | 0.284 | 0.349 | 0.634 | 0.616 | 0.346 | 0.492 | |
| 3D-ST[41] | 0.950 | 0.483 | 0.986 | 0.921 | 0.905 | 0.632 | 0.945 | 0.988 | 0.976 | 0.542 | 0.833 | |
| M3DM [44] | 0.943 | 0.818 | 0.977 | 0.882 | 0.881 | 0.743 | 0.958 | 0.974 | 0.95 | 0.929 | 0.906 | |
| FPFH(BTF) [43] | 0.972 | 0.849 | 0.981 | 0.939 | 0.963 | 0.693 | 0.975 | 0.981 | 0.980 | 0.949 | 0.928 | |
| FPFH(BTM) | 0.974 | 0.861 | 0.981 | 0.937 | 0.959 | 0.661 | 0.978 | 0.983 | 0.98 | 0.947 | 0.926 | |
| RGB | PatchCore [44] | 0.901 | 0.949 | 0.928 | 0.877 | 0.892 | 0.563 | 0.904 | 0.932 | 0.908 | 0.906 | 0.876 |
| M3DM [44] | 0.952 | 0.972 | 0.973 | 0.891 | 0.932 | 0.843 | 0.97 | 0.956 | 0.968 | 0.966 | 0.942 | |
| RGB iNet(BTF) [43] | 0.898 | 0.948 | 0.927 | 0.872 | 0.927 | 0.555 | 0.902 | 0.931 | 0.903 | 0.899 | 0.876 | |
| RGB iNet(BTM) | 0.901 | 0.958 | 0.942 | 0.905 | 0.951 | 0.615 | 0.906 | 0.938 | 0.927 | 0.916 | 0.896 | |
| RGB+3D | Depth GAN[40] | 0.421 | 0.422 | 0.778 | 0.696 | 0.494 | 0.252 | 0.285 | 0.362 | 0.402 | 0.631 | 0.474 |
| Depth AE[40] | 0.432 | 0.158 | 0.808 | 0.491 | 0.841 | 0.406 | 0.262 | 0.216 | 0.716 | 0.478 | 0.481 | |
| Depth VM[40] | 0.388 | 0.321 | 0.194 | 0.570 | 0.408 | 0.282 | 0.244 | 0.349 | 0.268 | 0.331 | 0.335 | |
| Voxel GAN[40] | 0.664 | 0.620 | 0.766 | 0.740 | 0.783 | 0.332 | 0.582 | 0.790 | 0.633 | 0.483 | 0.639 | |
| Voxel AE[40] | 0.467 | 0.750 | 0.808 | 0.550 | 0.765 | 0.473 | 0.721 | 0.918 | 0.019 | 0.170 | 0.564 | |
| Voxel VM[40] | 0.510 | 0.331 | 0.413 | 0.715 | 0.680 | 0.279 | 0.300 | 0.507 | 0.611 | 0.366 | 0.471 | |
| M3DM* | 0.966 | 0.971 | 0.978 | 0.949 | 0.941 | 0.92 | 0.977 | 0.967 | 0.971 | 0.973 | 0.961 | |
| BTF [43] | 0.976 | 0.967 | 0.979 | 0.974 | 0.971 | 0.884 | 0.976 | 0.981 | 0.959 | 0.971 | 0.964 | |
| BTM | 0.979 | 0.972 | 0.980 | 0.976 | 0.977 | 0.905 | 0.978 | 0.982 | 0.968 | 0.975 | 0.969 |
* Denotes results obtained by employing pre-trained parameters provided by the original studies. Unannotated results are directly excerpted from the corresponding literature.
Figure 8.
AD (I-AUROC) performance of k reweight metrics on BTF.

Table 3.
P-AUROC score for anomaly detection of all categories of MVTec-3D AD. Our method outperforms other methods in the 3D + RGB setting and achieves a 0.995 mean P-AUROC score.
Table 3.
P-AUROC score for anomaly detection of all categories of MVTec-3D AD. Our method outperforms other methods in the 3D + RGB setting and achieves a 0.995 mean P-AUROC score.
| Method | Bagel | Cable Gland | Carrot | Cookie | Dowel | Foam | Peach | Potato | Rope | Tire | Mean | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3D | M3DM [44] | 0.981 | 0.949 | 0.997 | 0.932 | 0.959 | 0.925 | 0.989 | 0.995 | 0.994 | 0.981 | 0.970 |
| FPFH(BTF) [43] | 0.995 | 0.955 | 0.998 | 0.971 | 0.993 | 0.911 | 0.995 | 0.999 | 0.998 | 0.988 | 0.980 | |
| FPFH(BTM) | 0.995 | 0.96 | 0.998 | 0.97 | 0.991 | 0.894 | 0.996 | 0.999 | 0.998 | 0.987 | 0.979 | |
| RGB | PatchCore [44] | 0.983 | 0.984 | 0.980 | 0.974 | 0.972 | 0.849 | 0.976 | 0.983 | 0.987 | 0.977 | 0.967 |
| M3DM [44] | 0.992 | 0.990 | 0.994 | 0.977 | 0.983 | 0.955 | 0.994 | 0.990 | 0.995 | 0.994 | 0.987 | |
| RGB iNet(BTF) [43] | 0.983 | 0.984 | 0.980 | 0.974 | 0.985 | 0.836 | 0.976 | 0.982 | 0.989 | 0.975 | 0.966 | |
| RGB iNet(BTM) | 0.984 | 0.987 | 0.984 | 0.979 | 0.991 | 0.872 | 0.976 | 0.983 | 0.992 | 0.979 | 0.973 | |
| RGB+3D | M3DM* | 0.994 | 0.994 | 0.997 | 0.985 | 0.985 | 0.98 | 0.996 | 0.994 | 0.997 | 0.995 | 0.992 |
| BTF [43] | 0.996 | 0.991 | 0.997 | 0.995 | 0.995 | 0.972 | 0.996 | 0.998 | 0.995 | 0.994 | 0.993 | |
| BTM | 0.997 | 0.993 | 0.998 | 0.995 | 0.996 | 0.979 | 0.997 | 0.999 | 0.996 | 0.995 | 0.995 |
* Denotes results obtained by employing pre-trained parameters provided by the original studies. Unannotated results are directly excerpted from the corresponding literature. Because the number of normal pixels overwhelmingly dominates in anomaly detection tasks, the importance of this metric has significantly diminished. Since 2021, AS tasks have primarily referenced the AUPRO metric.
Figure 9.
AD performance of kNN square distance mean metrics method on BTF.
3.7. Performance of kNN Squared Distance Mean Metrics on 2D Datasets with PatchCore Method
In this experiment, we used the official code and only modified the k value, keeping the evaluation metrics consistent with those in the original paper.
As shown in Figure 10, this work tests the impact of different k values on the anomaly detection and segmentation performance of PatchCore on the MVTec AD dataset (using the mean of squared distances to calculate anomaly scores).
Figure 10.
Impact of Different k Values on PatchCore Performance.
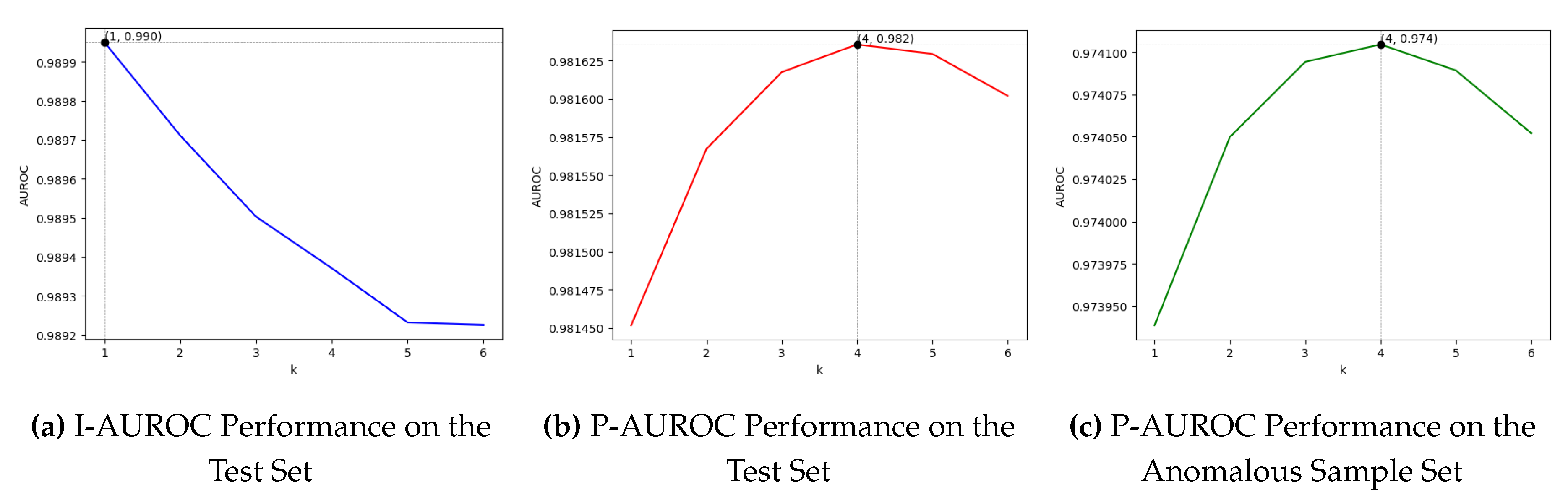
As shown in Figure 10a, for the anomaly detection task, the algorithm performs best when ; as k increases, the detection performance declines. As shown in Figure 10b and Figure 10c, the algorithm’s segmentation performance is poor when ; as k increases, the segmentation performance first improves and then declines, achieving the best segmentation performance at .
It is noteworthy that compared to the segmentation results in Figure 10b, which exclude normal samples (anomalous samples also have many normal pixels), the performance decline after reaching the peak value in Figure 10c is noticeably more gradual. This further supports the view that anomaly detection metrics require smaller k values.
4. Discussion
In Section 2.3, we analyze the kNN distance metric score distribution gradient. Through this, we find that k needs to be smaller than the number of samples in the cluster (defined in Equation 14) when calculating the anomaly score using the kNN distance metric. Anomaly detection performance is best when k is close to the number of samples in the cluster. Based on this finding, we design a simple anomaly score calculation method based on BTF, which uses different kNN metrics in AD and AS phases respectively, and name it BTM in Section 2.1. It is worth noting that more complex distance measures are worth further research. At the same time, when studying the distance metric, we should also consider the impact of the memory bank sampling method on the distance metric.
In Section 3.4, we verify the effectiveness of BTM through experiments on the real dataset MVTec-3D AD. BTM achieves excellent performance (I-AUROC 93.0%, AURPO 96.9%, P-AUROC 99.5%) ahead of the BTF method (I-AUROC 5.7% ↑, AURPO 0.5% ↑, P-AUROC 0.2% ↑). Without using foreground masks (manually created binary masks), BTM is still highly competitive compared to other state-of-the-art methods using manual foreground masks.
In Section 3.5 and Section 3.6, we further analyze the effect of different k values on the two distance measures and the different effects of various k values on the AD and AS tasks using real datasets. We further verify our conjecture in Section 2.3.
5. Conclusions
Different "clusters" have different requirements for the k value in kNN distance metrics. AD and AS tasks have different requirements for the value of k in the kNN distance metric. We designed the BTM method based on the BTF and performed experiments on MVTec-3D AD to verify this. We also call for further research on "More complex Distance Measures" and "The Impact of memory bank’s Sampling Method on Distance Measures".
Future work could consider the robust kNN methods proposed in recent studies. Rousseeuw and Hubert [50] suggest using robust statistics to enhance kNN by fitting the majority of the data and flagging outliers, while Li et al. [51] propose improvements to kNN to better handle various data distributions. These approaches can serve as valuable references for enhancing kNN-based anomaly detection methods.
Author Contributions
Conceptualization, Yujing Lin; Formal analysis, Yujing Lin; Funding acquisition, Xiaoqiang Li; Investigation, Yujing Lin; Methodology, Yujing Lin; Resources, Yujing Lin and Xiaoqiang Li; Software, Yujing Lin; Supervision, Xiaoqiang Li; Validation, Yujing Lin; Visualization, Yujing Lin; Writing – original draft, Yujing Lin; Writing – review & editing, Xiaoqiang Li.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
In this manuscript, the employed datasets have been taken with license agreements from the corresponding institutions with proper channels.
Acknowledgments
I would like to express my heartfelt thanks to my tutor Xiaoqiang Li, Ms. Jiayuem Han and Mr. Jide Li for their guidance on this paper.
Conflicts of Interest
The authors declare no conflict of interest.
| 1 | Image reprinted with permission from Yedid Hoshen, for academic use only. (arXiv preprint arXiv:2002.10445; published by arXiv, 2020.) |
Appendix A. Formula Mentioned in the Original Article of PatchCore
The following equations are subject to ongoing debate, and their implementation has not been publicly disclosed by the authors. Additionally, public inquiries regarding these equations from June 15, 2022, remain unanswered [52,53]. Current academic work related to this can be summarized by equations 3, 4, 5, 6, and 7 in the paper, which conflict with the cited equations. Including these equations in the main text may cause further confusion and conflict.
Appendix A.1. Expressed in the Original Article
Appendix A.2. Expressed in Our Context
References
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM computing surveys (CSUR) 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Ruff, L.; Kauffmann, J.R.; Vandermeulen, R.A.; Montavon, G.; Samek, W.; Kloft, M.; Dietterich, T.G.; Müller, K.R. A unifying review of deep and shallow anomaly detection. Proceedings of the IEEE 2021, 109, 756–795. [Google Scholar] [CrossRef]
- Rippel, O.; Merhof, D. Anomaly Detection for Automated Visual Inspection: A Review. Bildverarbeitung in der Automation: Ausgewählte Beiträge des Jahreskolloquiums BVAu 2022 2023, pp. 1–13.
- Liu, J.; Xie, G.; Wang, J.; Li, S.; Wang, C.; Zheng, F.; Jin, Y. Deep industrial image anomaly detection: A survey. Machine Intelligence Research 2024, 21, 104–135. [Google Scholar] [CrossRef]
- Bergmann, P.; Fauser, M.; Sattlegger, D.; Steger, C. MVTec AD–A comprehensive real-world dataset for unsupervised anomaly detection. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 9592–9600.
- Bergmann, P.; Batzner, K.; Fauser, M.; Sattlegger, D.; Steger, C. The MVTec anomaly detection dataset: a comprehensive real-world dataset for unsupervised anomaly detection. International Journal of Computer Vision 2021, 129, 1038–1059. [Google Scholar] [CrossRef]
- Mishra, P.; Verk, R.; Fornasier, D.; Piciarelli, C.; Foresti, G.L. VT-ADL: A vision transformer network for image anomaly detection and localization. 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE). IEEE, 2021, pp. 01–06.
- Huang, Y.; Qiu, C.; Yuan, K. Surface defect saliency of magnetic tile. The Visual Computer 2020, 36, 85–96. [Google Scholar] [CrossRef]
- Bergmann, P.; Batzner, K.; Fauser, M.; Sattlegger, D.; Steger, C. Beyond dents and scratches: Logical constraints in unsupervised anomaly detection and localization. International Journal of Computer Vision 2022, 130, 947–969. [Google Scholar] [CrossRef]
- Li, C.L.; Sohn, K.; Yoon, J.; Pfister, T. Cutpaste: Self-supervised learning for anomaly detection and localization. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 9664–9674.
- Zavrtanik, V.; Kristan, M.; Skočaj, D. Draem-a discriminatively trained reconstruction embedding for surface anomaly detection. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 8330–8339.
- Liu, Z.; Zhou, Y.; Xu, Y.; Wang, Z. Simplenet: Asimplenet work for image anomaly detection and localization. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 20402–20411.
- Schlüter, H.M.; Tan, J.; Hou, B.; Kainz, B. Natural synthetic anomalies for self-supervised anomaly detection and localization. European Conferenceon Computer Vision. Springer, 2022, pp. 474–489.
- Dai, S.; Wu, Y.; Li, X.; Xue, X. Generating and reweighting dense contrastive patterns for unsupervised anomaly detection. Proceedings of the AAAI Conference on Artificial Intelligence, 2024, Vol. 38, pp. 1454–1462.
- Ye, Z.; Chen, Y.; Zheng, H. Understanding the effect of bias in deep anomaly detection. arXiv preprint arXiv:2105.07346 2021.
- Rippel, O.; Mertens, P.; König, E.; Merhof, D. Gaussian anomaly detection by modeling the distribution of normal data in pretrained deep features. IEEE Transactions on Instrumentation and Measurement 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Rippel, O.; Mertens, P.; Merhof, D. Modeling the distribution of normal data in pre-trained deep features for anomaly detection. 2020 25th International Conference on Pattern Recognition (ICPR). IEEE, 2021, pp. 6726–6733.
- Cordier, A.; Missaoui, B.; Gutierrez, P. Data refinement for fully unsupervised visual inspection using pre-trained networks. arXiv preprint arXiv:2202.12759 2022.
- Yoon, J.; Sohn, K.; Li, C.L.; Arik, S.O.; Lee, C.Y.; Pfister, T. Self-supervise, refine, repeat: Improving unsupervised anomaly detection. arXiv preprint arXiv:2106.06115 2021.
- Davletshina, D.; Melnychuk, V.; Tran, V.; Singla, H.; Berrendorf, M.; Faerman, E.; Fromm, M.; Schubert, M. Unsupervised anomaly detection for X-ray images. arXiv preprint arXiv:2001.10883 2020.
- Nguyen, D.T.; Lou, Z.; Klar, M.; Brox, T. Anomaly detection with multiple-hypotheses predictions. International Conference on Machine Learning. PMLR, 2019, pp. 4800–4809.
- Sakurada, M.; Yairi, T. Anomaly detection using autoencoders with nonlinear dimensionality reduction. Proceedings of the MLSDA 2014 2nd workshop on machine learning for sensory data analysis, 2014, pp. 4–11.
- Pidhorskyi, S.; Almohsen, R.; Doretto, G. Generative probabilistic novelty detection with adversarial autoencoders. Advances in neural information processing systems 2018, 31. [Google Scholar]
- Sabokrou, M.; Khalooei, M.; Fathy, M.; Adeli, E. Adversarially learned one-class classifier for novelty detection. Proceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 3379–3388.
- Akcay, S.; Atapour-Abarghouei, A.; Breckon, T.P. Ganomaly: Semi-supervised anomaly detection via adversarial training. Computer Vision–ACCV 2018: 14th Asian Conference on Computer Vision, Perth, Australia, December 2–6, 2018, Revised Selected Papers, Part III 14. Springer, 2019, pp. 622–637.
- Rudolph, M.; Wandt, B.; Rosenhahn, B. Same same but differnet: Semi-supervised defect detection with normalizing flows. Proceedings of the IEEE/CVF winter conference on applications of computer vision, 2021, pp. 1907–1916.
- Gudovskiy, D.; Ishizaka, S.; Kozuka, K. Cflow-ad: Real-time unsupervised anomaly detection with localization via conditional normalizing flows. Proceedings of the IEEE/CVF winter conference on applications of computer vision, 2022, pp. 98–107.
- Rudolph, M.; Wehrbein, T.; Rosenhahn, B.; Wandt, B. Fully convolutional cross-scale-flows for image-based defect detection. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2022, pp. 1088–1097.
- Zhou, Y.; Xu, X.; Song, J.; Shen, F.; Shen, H.T. MSFlow: Multiscale Flow-Based Framework for Unsupervised Anomaly Detection. IEEE Transactions on Neural Networks and Learning Systems 2024. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Zheng, Y.; Wang, X.; Li, W.; Wu, Y.; Zhao, R.; Wu, L. Fastflow: Unsupervised anomaly detection and localization via 2d normalizing flows. arXiv preprint arXiv:2111.07677 2021.
- Ruff, L.; Vandermeulen, R.A.; Görnitz, N.; Binder, A.; Müller, E.; Müller, K.R.; Kloft, M. Deep semi-supervised anomaly detection. arXiv preprint arXiv:1906.02694 2019.
- Yi, J.; Yoon, S. Patch svdd: Patch-level svdd for anomaly detection and segmentation. Proceedings of the Asian conference on computer vision, 2020.
- Reiss, T.; Cohen, N.; Bergman, L.; Hoshen, Y. Panda: Adapting pretrained features for anomaly detection and segmentation. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 2806–2814.
- Bergman, L.; Cohen, N.; Hoshen, Y. Deep nearest neighbor anomaly detection. arXiv preprint arXiv:2002.10445 2020.
- Cohen, N.; Hoshen, Y. Sub-image anomaly detection with deep pyramid correspondences. arXiv preprint arXiv:2005.02357 2020.
- Defard, T.; Setkov, A.; Loesch, A.; Audigier, R. Padim: a patch distribution modeling framework for anomaly detection and localization. International Conference on Pattern Recognition. Springer, 2021, pp. 475–489.
- Roth, K.; Pemula, L.; Zepeda, J.; Schölkopf, B.; Brox, T.; Gehler, P. Towards total recall in industrial anomaly detection. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 14318–14328.
- D’oro, P.; Nasca, E.; Masci, J.; Matteucci, M. Group anomaly detection via graph autoencoders. NIPS Workshop, 2019, Vol. 2.
- Hyun, J.; Kim, S.; Jeon, G.; Kim, S.H.; Bae, K.; Kang, B.J. ReConPatch: Contrastive patch representation learning for industrial anomaly detection. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2024, pp. 2052–2061.
- Bergmann, P.; Jin, X.; Sattlegger, D.; Steger, C. The MVTec 3D-AD Dataset for Unsupervised 3D Anomaly Detection and Localization. Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications. SCITEPRESS - Science and Technology Publications, 2022, pp. 202–213. [CrossRef]
- Bergmann, P.; Sattlegger, D. Anomaly detection in 3d point clouds using deep geometric descriptors. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2023, pp. 2613–2623.
- Rudolph, M.; Wehrbein, T.; Rosenhahn, B.; Wandt, B. Asymmetric student-teacher networks for industrial anomaly detection. Proceedings of the IEEE/CVF winter conference on applications of computer vision, 2023, pp. 2592–2602.
- Horwitz, E.; Hoshen, Y. Back to the feature: classical 3d features are (almost) all you need for 3d anomaly detection. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 2967–2976.
- Wang, Y.; Peng, J.; Zhang, J.; Yi, R.; Wang, Y.; Wang, C. Multimodal industrial anomaly detection via hybrid fusion. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 8032–8041.
- Zavrtanik, V.; Kristan, M.; Skočaj, D. Cheating Depth: Enhancing 3D Surface Anomaly Detection via Depth Simulation. Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2024, pp. 2164–2172.
- Chu, Y.M.; Liu, C.; Hsieh, T.I.; Chen, H.T.; Liu, T.L. Shape-guided dual-memory learning for 3D anomaly detection. Proceedings of the 40th International Conference on Machine Learning, 2023, pp. 6185–6194.
- Peterson, L.E. K-nearest neighbor. Scholarpedia 2009, 4, 1883. [Google Scholar] [CrossRef]
- Sener, O.; Savarese, S. Active Learning for Convolutional Neural Networks: A Core-Set Approach. International Conference on Learning Representations, 2018.
- Muhr, D.; Affenzeller, M.; Küng, J. A Probabilistic Transformation of Distance-Based Outliers. Machine Learning and Knowledge Extraction 2023. [Google Scholar] [CrossRef]
- Rousseeuw, P.J.; Hubert, M. Anomaly detection by robust statistics. Wiley Interdisciplinary Reviews: Data Mining and Knowledge Discovery 2018, 8, e1236. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Wang, C. Systematic testing of the data-poisoning robustness of KNN. Proceedings of the 32nd ACM SIGSOFT International Symposium on Software Testing and Analysis, 2023, pp. 1207–1218.
- Classmate-Huang. The anomaly detection process, 2022. Accessed on GitHub, 2024.
- nuclearboy95. Anomaly score calculation is different from the paper, 2022. Accessed on GitHub, 2024.
Figure 1.
(a) The Architecture of the Back to the Metrics(BTM). (b) Process of Feature Extraction and Fusion with Fast Point Feature Histograms (FPFH) and Pre-trained Network.
Figure 1.
(a) The Architecture of the Back to the Metrics(BTM). (b) Process of Feature Extraction and Fusion with Fast Point Feature Histograms (FPFH) and Pre-trained Network.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



