Submitted:
13 June 2024
Posted:
13 June 2024
You are already at the latest version
Abstract
The number of visible navigation satellites in a multi-constellation system increases exponentially compared to a single constellation, significantly increasing the complexity of the system state equations in the data fusion algorithm of a tightly coupled navigation system. This results in an exponential increase in the computation volume for navigation and positioning, seriously affecting real-time performance. To address this, a low-cost, low-computation satellite screening algorithm is proposed. It adaptively changes the number of constellation satellites by setting different screening thresholds and adjusting the number of remaining satellites. The algorithm then sorts and differentiates the azimuth and elevation angles of the screened satellites to form a selection strategy that divides the space region multiple times, enabling fast satellite selection. This approach greatly reduces the calculation amount while ensuring positioning accuracy. Experimental results show that the proposed algorithm maintains positioning differences within 5 meters compared to traditional satellite selection algorithms, and the time consumed for selecting a single epoch is greatly reduced. This indicates that the algorithm is suitable for low-cost multi-constellation satellite positioning systems.
Keywords:
satellite screening
; elevation angle
; GDOP value
1. Introduction
With the successful launch of the last satellite of BeiDou-3 in 2020, the global satellite navigation systems that already exist in the world are the GPS system of the United States, the BeiDou system of China, the Galileo system of the European Union and the GLONASS system of Russia. At the same time, through the combination of multi-satellite systems, the number of visible stars at the same epoch moment has gradually increased from 6~10 to nearly 401. However, the redundancy of navigation information caused by too much observation information does not significantly increase the positioning accuracy, and the large amount of data rather puts a great burden on the receiver system, and may even cause a lag in the positioning solution.
In conclusion, a satellite screening technique with the ability to identify and eliminate faulty stars under multi-constellation system and provide optimal navigation constellations is particularly important. The satellite screening algorithm mainly accomplishes two tasks: the first part is to detect the coarseness in the observation information, and then exclude the faulty stars, i.e., the screening algorithm; the main goal of this part is to ensure that the faulty stars will not participate in the localization as far as possible and at the same time to reduce the amount of computation. The second part is to select suboptimal observation constellations among the remaining satellites after screening, i.e., the star selection algorithm; the goal of this part is to select the satellite combinations with better configurations among the remaining constellations, so as to ensure the localization accuracy and further reduce the computational burden of the computer significantly2.The goal of this part is to select a combination of satellites with better configuration among the remaining constellations, and further reduce the computational burden of the computer significantly while ensuring the positioning accuracy.
Among them, the literature[3 proposes a satellite screening UERE model that takes into account multiple types of errors, the system computation elapsed time for a single calendar element has been significantly reduced, which greatly improves the real-time performance of the positioning system, but the increase in the GDOP value is also more pronounced, and the positioning error is larger. Considering that different satellites are located in different spatial positions, the ranging error has some differences, the literature4 Considering the heteroskedasticity of satellite pseudorange measurement errors on the basis of the least squares (LS) method, the screening probability of faulty satellites is further improved by using the weighted least squares (WLS) algorithm. Literature5. proposes a satellite selection method using the minimum GDOP combined Walker configuration, which maintains the GDOP value better, but the requirements for the receiver location are more demanding and only applicable to the mid-latitude region. Literature6 Using the symmetric positive definiteness of the measurement matrix, a GDOP solution based on the UT decomposition of the matrix is proposed to solve the problem of large computation and poor numerical stability in the matrix inverse process in the star selection process of GDOP. Liang Z, Hanfeng L7 et al. take the altitude angle as the starting point of star selection, and categorize the visible stars into high elevation zone, middle elevation zone and low elevation zone according to the altitude angle information. Through the combination verification, it is concluded that the optimal combination is mainly concentrated in the high elevation angle region and low elevation angle region, and the number ratio is close to 1:3.
In summary, based on the analysis of GDOP value of multi-system combined navigation system, this paper proposes a fast star selection algorithm based on multi-threshold optimization, which judges, analyzes, and screens for the elevation angle, direction angle, and satellite carrier-to-noise ratio, and selects a suitable navigation constellation. In order to ensure that the loss of GDOP value is within the acceptable range of the user, at the same time, the real-time performance of the positioning system is greatly improved, and the algorithm is verified by the real test through the sports car experiment.
2. Analysis of Satellite Selection Algorithms in Satellite Positioning Systems
2.1. Analysis of Single-Point Positionn and GDOP Values in Single Systems
For a pseudo-range single-point positioning system with a single constellation, such as the GPS positioning system, if N satellites are observed at a certain epoch, the pseudo-range observation equation for any one of these satellites can be expressed as
where is the coordinates of the ith satellite in the Earth-Centered, Earth-Fixed (ECEF) coordinate system, is the pseudorange observation value of the ith satellite, which includes the Satellite clock bias , the tropospheric delay , the ionospheric delay , and other delays8. It is the coordinate value of the receiver, and is the receiver clock difference (in order to facilitate the calculation, the clock bias is usually converted to length unit). To solve the receiver coordinates and receiver clock difference, it is necessary to linearize the system of quadratic nonlinear equations. After linearization, the matrix form of the equation is:
where is the geometric pseudo-distance value between the GPS satellite and the target receiver.is the direction cosines of the vector from the receiver to the satellite in the directions. and are the deviations of the true and estimated values of the target receiver in the,anddirections.
Define the navigation observation matrix as
The positioning accuracy of a satellite navigation system depends on two factors: the measurement accuracy between the user and the satellite, and the geometric distribution determined by the spatial constellation configuration9.Generally, the quality is assessed by the Geometric Dilution of Precision (GDOP) value. A smaller GDOP value indicates higher positioning accuracy, while a larger GDOP value indicates lower positioning accuracy. The GDOP value can be obtained through the weight matrix formed by the navigation observation matrix, as follows:
The above equations are based on the assumption that the observation errors of all satellites are the same, but in practice, in order to minimize the impact of the observation errors on the positioning results, the weighted least squares method is usually used for the positioning solution. Now add the weighted coefficient matrix and its least squares estimate where the weighted coefficient matrix is:
And the geometric accuracy factor after introducing the weighting of the pseudorange measurement error variance can be expressed as:
For single-system satellite navigation systems, The calculation of the GDOP value usually does not impose a significant computational burden on the positioning system. Assuming that at an observation epoch, the receiver observes 8 GPS satellites, and selects of them to perform weighted least squares positioning calculation, only matrix multiplication and matrix inverse operations are required to obtain the optimal constellation configuration for single-point positioning. Therefore, for a single constellation satellite navigation system, the star selection method of traversing through GDOP values is usually feasible and effective.
2.2. Analysis of GDOP Values for Multi-System Satellite Position System
In a multi-system satellite positioning system, affected by the different time bases between systems, it is necessary to consider adding clock biases between the different systems as state variables when forming the navigation observation matrix 10.Taking GPS/BDS/Galileo three-system satellite positioning system as an example, If a set of BDS satellites and a set of Galileo satellites are added, the navigation observation matrix is modified as follows:
At this point, the number of columns in the observation matrix has reached 6. With the addition of BDS and Galileo satellites, the number of observable satellites will significantly increase. Assuming that at a certain epoch, a total of 22 GPS/BDS/Galileo satellites are observed simultaneously, and due to the introduction of clock bias, the number of unknowns in the linearized pseudorange observation equations reaches 6. Therefore, at least 6 visible satellites need to be selected for positioning.The optimal GDOP value selection method needs to carry out thetimes of the GDOP value operation in order to get the better satellite spatial configurations. If we continue to improve the positioning accuracy by invoking the weighted least squares solver, a total of matrix multiplications and inverse operations are required in this calendar element to complete the star selection.
It can be seen that with the increase in the number of satellite systems and satellites, both the number of columns in the observation matrix and the number of satellites increase exponentially. The traditional GDOP-based satellite selection method, which calculates the minimum GDOP value based on permutations and combinations, takes too much system computation time during the satellite selection process. Therefore, the traditional optimal GDOP-based satellite selection method is not suitable for multi-constellation single point positioning.
3. Fast Satellite Screening Method Based on Multi-Threshold Optimization
In order to control the complexity of positioning settlement in multi-system positioning system, it is necessary to optimize for multi-system satellites. Firstly, the faulty stars are eliminated to ensure the positioning accuracy, and the sub-optimal constellations are selected to compress the number of permutation combinations, which ultimately achieves the purpose of maintaining the positioning accuracy while reducing the amount of computation.
3.1. Satellite Elevation Angle and Carrier-to-Noise Ratio Modeling
In the signal transmission process from the satellite to the receiver, the measurement pseudorange of low elevation angle satellites has a large error caused by, for example, ionospheric error, tropospheric error, and multipath effect, so its ranging accuracy is also lower, and is prone to pseudorange outliers11. Therefore, it is necessary to set up the elevation angle based measurement. Therefore, it is necessary to exclude such satellites by setting a satellite screening threshold based on elevation angle.
Second, a carrier-to-noise ratio-based satellite screening threshold is set. Literature10 pointed out that satellites in the elevation angle interval of 30°~60° have a higher probability of being rejected by the GDOP value selection method, and there are more satellites with similar azimuth values in this interval. Therefore, the satellites with elevation angles in the range of 30°~60° can be screened, and the satellites with excessive carrier-to-noise ratios can be eliminated without too much influence on the volume of the polyhedron composed of satellites and users, which ensures the positioning accuracy of the satellites after being screened out.
3.2. Modeling the Relationship between GDOP Values and Star Selection Ratios
According to the multi-constellation combination of the satellite guidance system for satellite selection before and after the GDOP value changes to determine the number of suboptimal distribution of satellites. GPS/Galileo/BeiDou three systems are selected to establish a simulation platform based on ephemeris parameters and actual observations, and the elevation angle of the masking satellite is set to 5°, the relationship between the results of the optimal GDOP value selection method in Nanjing and the value of the ratio of the selected satellites is shown in Table 1, and the observation time is a total of 2.5h, the observation interval is 5s, and the total number of observable ephemeris is 1800. The ratio is the ratio of the total number of retained satellites and the total number of observed satellites . The GDOP value before and after selection is the GDOP value. is the amount of loss of GDOP value before and after star selection.
It can be seen that the GDOP value of the multi-constellation positioning system increases with the decrease of the star selection ratio, but the two do not form a linear relationship13 However, the GDOP value decreases less when the proportion of selected stars is larger (≥70%), which does not cause much loss of positioning accuracy, while the GDOP value increases significantly when the proportion of selected stars is lower than 70%. From this, it is conjectured that the GDOP value and the proportion of selected stars follow the negative exponential decay law13 The GDOP value-star selection ratio model is assumed to be as follows:
where GDOP’ denotes the GDOP value after the star selection, , , are related to the number of visible stars of the navigation system, and the selected value is determined by a large number of a priori measured data. In this paper, through the traditional minimum GDOP value selection method to traverse the simulation of the satellite data of multiple observation calendar elements within 3 hours, and analyze a large amount of data to obtain the GDOP value model as in Eq:
is the total number of observable satellites, and is the selection ratio. Users can use this model to determine the selection ratio by the number of satellites to optimize the positioning accuracy in real time. The star selection algorithm studied in the following section is affected by the observation time, and the star selection ratio is determined to be 70% on the premise of ensuring a small loss of positioning accuracy.
4. Strategies for Rapid Star Selection Methods for Dividing Regions by Spatial Elevation Angles
Based on the multi-threshold principle of screening out satellites and determining the proportion of selected satellites, the remaining satellites obtained are considered to be healthy satellites, i.e., the errors in the measurement accuracy are all smaller, and at this time, the positioning accuracy of the navigation system mainly depends on the geometrical distribution of the satellites. The GDOP value is selected to characterize the positioning accuracy after the selection of stars.The GDOP value represents the degree of amplification of the positioning error during the positioning process, i.e., the smaller the GDOP value is, the higher the positioning accuracy can be considered to be for this calendar element.
Literature15 pointed out that in the star selection strategy, the larger the selected top star altitude is, the more uniform the azimuthal distribution of the remaining low-altitude angle satellites is, and the smaller the obtained GDOP value is. Based on the above principles, this paper proposes a spatial elevation angle selection algorithm based on the fusion of three systems, based on the three major satellite positioning systems, GPS, BeiDou and Galileo, which have a wide range of application:
(1) The elevation angles of visible stars are divided into three regions: ,,,which are called low elevation angle region, medium elevation angle region and high elevation angle region respectively, and the number of satellites in the high elevation angle region and the low elevation angle region are calculated as ,and their ratios, so that we can get the distribution information of the elevation angles of the visible stars as a whole.
(2) Determine the number of satellites in the low-elevation region based on the ratio of low-elevation and high-elevation satellites in each quadrant, distribute the remaining satellites evenly in different elevation quadrants16. The remaining satellites are evenly distributed in different elevation quadrants, and the remaining satellites are selected by the permutation algorithm.
(3) With the satellite receiver as the center of the circle, the sky is divided into four quadrants according to the satellite azimuth angles as (0°,90°), (90°,180°), (180°,270°), (270°,360°), and the satellite with the largest spatial elevation angle in each quadrant is selected as the first four satellites in the star selection strategy. For the remaining visible stars, sorting is performed according to the azimuth angle, and the azimuth difference between the two satellites before and after is calculated in turn. If the azimuth angle of two satellites is too close, one of them is excluded based on the overall observable satellite elevation angle and other satellite information, which can largely ensure that the volume of the polyhedron composed of all satellites and receivers is kept as constant as possible.
The above satellite selection strategy takes into account both high and low elevation angle satellites and achieves the basic unchanged spatial configuration of the original satellites. The selection of satellites with high elevation angles can supplement the altitude direction positioning information, and the selection of satellites with low elevation angles can supplement the horizontal plane direction information.
The fast star selection algorithm selection strategy is shown in Figure 1:
5. Experimental Validation and Result Analysis
In this section, the effectiveness of the proposed algorithm is verified, the robustness and complexity of the algorithm of the system in this paper are judged, and a sports car experiment is conducted to verify the effectiveness of the algorithm. The experimental program is based on the C language implementation of the weighted least squares method in Chapter 2 of this paper, and the collected data contains three system satellites of GPS, BeiDou and Galileo.
5.1. Comparative Analysis of GDOP Values
The GDOP values are compared between the fast star selection method with multi-threshold optimization proposed in this paper and the star selection method with the best GDOP values. The data observation time is 3h, the observation frequency is 1s, and the results of calculating GDOP values are shown in Figure 2, Figure 3, Figure 4 and Figure 5.
The results of the GDOP values for each different percentage of star selections were statistically analyzed to obtain Table 2.
As can be seen from the table, under the multi-constellation navigation system, the star selection algorithm designed in this paper has a significant reduction in its system computation compared to the unselected star system. To a calendar element observed 22 satellites as an example, when the user selects the weighted least squares algorithm to locate the solution (assuming 10 iterations), each iteration needs to carry out the second matrix multiplication and a six-dimensional matrix inverse, the traditional optimal GDOP method needs to be carried out a total of such as the above operation, while the optimized star selection algorithm used in this paper needs to be carried out only at most times permutations and combinations. The experimental results show that the fast star selection algorithm proposed in this paper reduces the star selection calendar element system operations by 81.89% compared to the traditional optimal GDOP value star selection algorithm.
5.2. Positioning Accuracy Analysis
A 30-minute field car running experiment is conducted. The positioning results of the traditional optimal GDOP value selection and the optimized GDOP value selection with multi-threshold screening are compared with the real value of the car, and the number of retained satellites of the selection algorithms are set to be more than 6 and not less than 80% of the total number of observed satellites. The satellite signal sampling interval is set to 0.5s, and a total of 1800 calendar elements can be observed during the whole experiment.
From Figure 6, Figure 7 and Figure 8, it can be seen that the proposed star selection algorithm in this paper maintains a better overall localization accuracy relative to the optimal GDOP value selection method. In the X-axis component, the overall error is maintained smoothly, and in the Y- and Z-axis components, the number of fluctuations in the positioning error gradually increases after 1200s, but remains within the acceptable range. At the same time, when the satellite configuration changes, the positioning accuracy of the proposed algorithm is prone to large fluctuations, which is manifested in large jump points. Table 4 shows the error comparison between the fast star selection algorithm and the best GDOP star selection method, and it can be found that the positioning of the star selection algorithm in this paper is not precise enough, but it is within the acceptable range.
From Table 3, it can be seen that the error of the fast star selection algorithm proposed in this paper is maintained better compared to the traditional star selection method, with an increase of 38.77% in the X-axis direction, 14.97% in the Y-axis direction, and 9.96% in the Z-axis direction.
Considering the substantial optimization of the system's arithmetic and complexity, the algorithms in this paper result in an increase in error that is within the acceptable range for the user and meets the design requirements of this paper.
6. Conclusion
By analyzing the positioning accuracy and system computing power of multi-system combined navigation, for the optimal GDOP value star selection algorithm and parameters such as visible satellite elevation angle and signal carrier-to-noise ratio, this paper puts forward a star selection algorithm applied to multi-constellation satellite navigation system, which ensures that the selected satellites have a good spatial distribution state, and the satellites participating in the solution are controlled to be more than 6 satellites. According to the designed star selection logic and algorithm rules, the following conclusions are obtained through field experiments:
(1) Compared with the traditional star selection algorithm, the proposed algorithm in this paper is more stable, with less loss of positioning accuracy, and the GDOP value of a single calendar element increases by only 14.90% after optimization.
(2) Greatly reduce the burden of multi-constellation system operation, the speed of selecting the star calendar element to locate the solution is increased by 81.89%, and the real-time performance of the system is improved.
(3) In an environment where the number of visible satellites is reduced, the system will not be able to obtain enough satellites for solving because of the reduction of satellites meeting the requirements of star selection, and the navigation and positioning results will be manifested as the appearance of a sudden jump point.
In summary, the optimal GDOP value selection algorithm based on multi-threshold optimization proposed in this paper has certain reference significance for the design and development of multi-constellation satellite navigation system.
Author Contributions
Conceptualization, W.Z. and Z.W.; methodology, W.Z.; software, W.Z.; validation, W.Z.; formal analysis, W.Z.; investigation, W.Z.; resources, Z.W.; data curation, W.Z.; writing—original draft preparation, W.Z.; writing—review and editing, Z.W.; supervision, Z.W.; All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen Q, Yi. Analysis of the Four Global Satellite Navigation Systems. Journal of Navigation and Positioning, 2020, 8, 115–120.
- LI Guang-yao,XU cheng-dong,ZHANG Peng-fei,et al. A modified satellite seleciton algorithm based on satellite contribution for GDOP in GNSS [J]. Lectuer Notes in Electrical Engineering 2013, 176, 415–421.
- Niu Y, Li K. A Weighted Satellite Selection Algorithm for GNSS Four Systems Considering Range Measurement Errors. Journal of Navigation and Positioning, 2023, 11, 124–130.
- Xue S, Yang Y. Minimum GDOP Combined Walker Constellation Configuration. Journal of Wuhan University (Information Science Edition), 2016, 41, 380–387.
- Han, T. Research on Satellite Selection Strategy for GNSS Multi-System[D]. Shanghai Jiao Tong University, 2014.
- Yang J, Zhang H. Optimal Odd-Even Vector Method for Satellite Fault Diagnosis. Acta Aeronautica et Astronautica Sinica, 2002, 183-186.
- Liang Z, Hanfeng L, Dingjie W, et al. Asynchronous RTK precise DGNSS positioning method for deriving a low-latency high-rate output. Journal of Geodesy, 2015, 89, 641–653.
- TENG Y, WANG J, HUANG Q, et al. New characteristics of weighted GDOP in multi-GNSS positioning. GPS Solutions, 2018, 22, 74.
- Zhang X, He L, Li Y, et al. An Improved Satellite Selection Algorithm Based on Elevation Angle and GDOP Contribution Value. Software Guide, 2016, 15, 16–20.
- Chen J, Xu L, Li X. Analysis of the Influence of Receiver Positioning Error on GNSS Timing. Journal of Instrumentation and Instrumentation, 2017, 38, 1458–1465. [CrossRef]
- Qian H, Fu Z, Ning X, et al. GPS/SINS Fault Diagnosis Algorithm with Unknown Distribution Array of System Interference. Journal of Instrumentation and Instrumentation, 2013, 34, 208–214. [CrossRef]
- Lu, Y. 1: global positioning receiver-principle and software solution.Beijing: Publishing House of Electronics Industry, 2009; 128–133.
- Wang B, Tian S, Zhong Y, et al. Design of Satellite Selection Scheme for GNSS Multi-System Fusion Relative Positioning and Accuracy Analysis. Beijing Surveying and Mapping, 2021, 35, 500–504.
- I: M R,Divband M. Calculation of geometric dilution of precision using adaptive filtering technique based on evolutionary algorithms[C]/ /2010 International Conference on Electrical and Control Engineering. Wuhan, Wuhan: IEEE Xplore Digital Library,2010. 2010.
- Jin L, Huang Z, Li R, et al. Research on Rapid Satellite Selection Algorithm for Multi-Satellite Navigation System. Acta Electronica Sinica, 2009, 37, 1931–1936.
- Huang J, Ba X, Liu H, et al. A Rapid Satellite Selection Algorithm for Multi-Constellation Based on Positioning Error. Science Technology and Engineering, 2015, 15, 87–91.
Figure 1.
Flowchart of star selection algorithm.
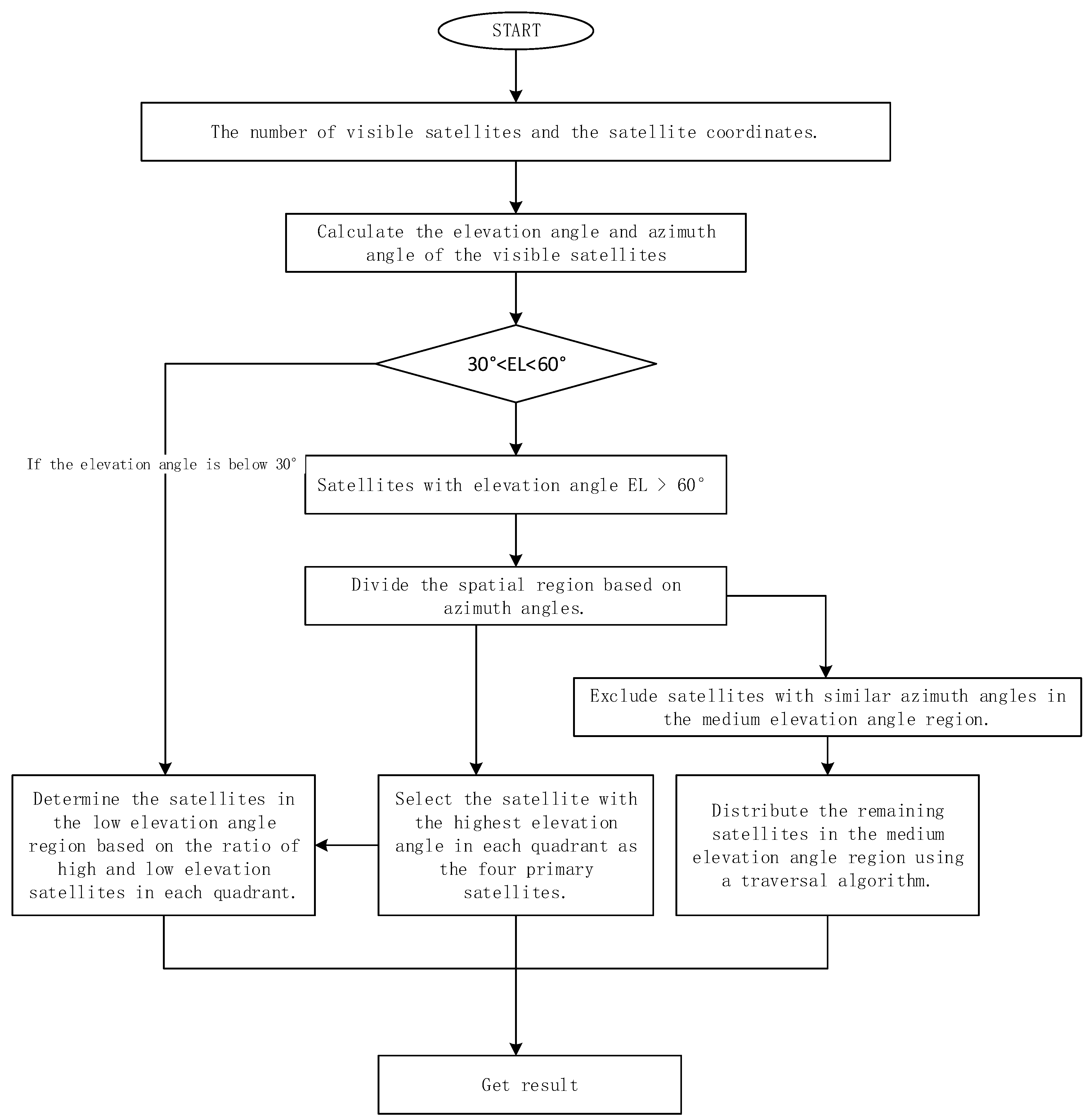
Figure 2.
Curve of GDOP value when the percentage of star selection is 90%.
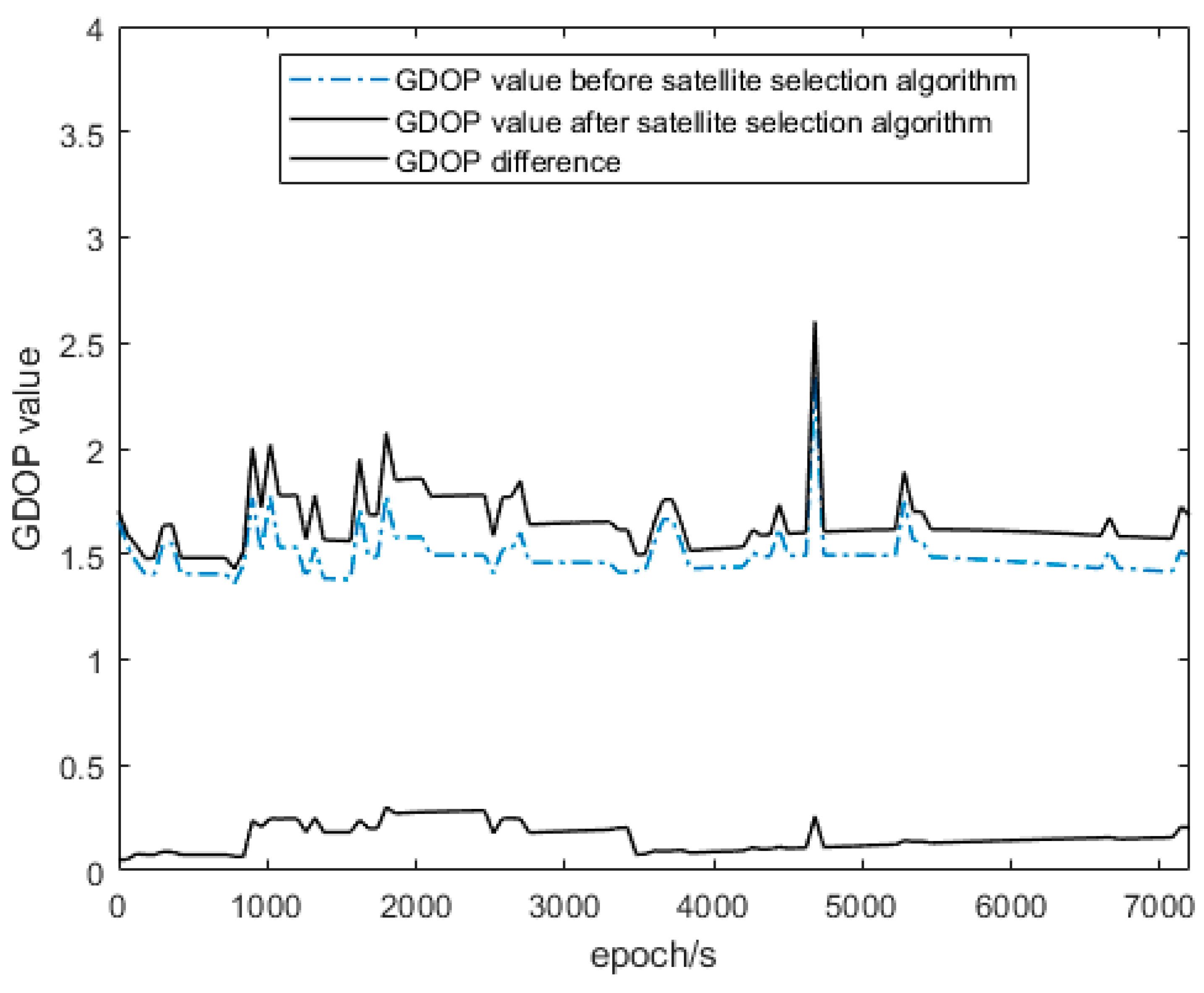
Figure 3.
Curve of GDOP value when the proportion of selected stars is 80%.
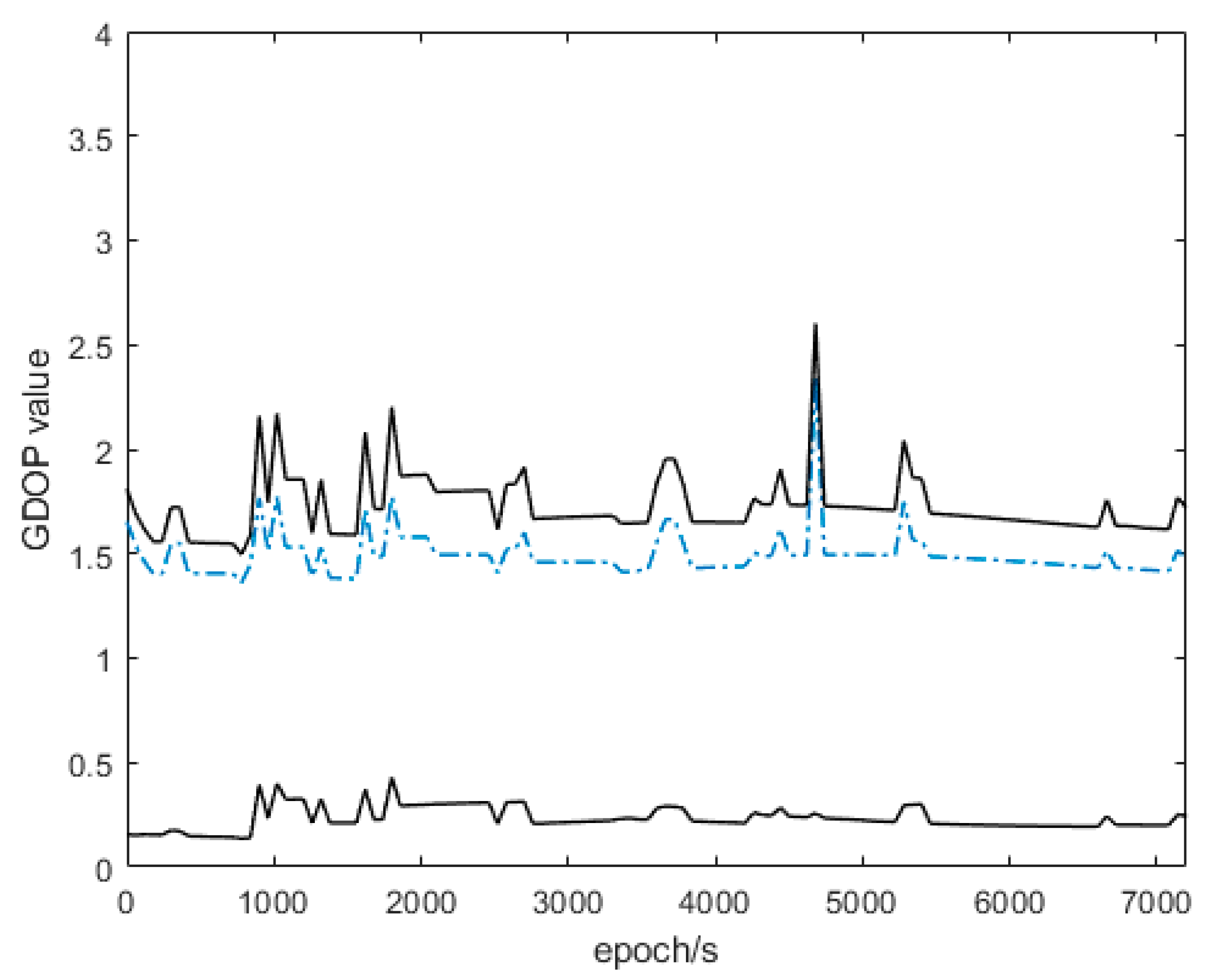
Figure 4.
Curve of GDOP value when the proportion of selected stars is 70%.
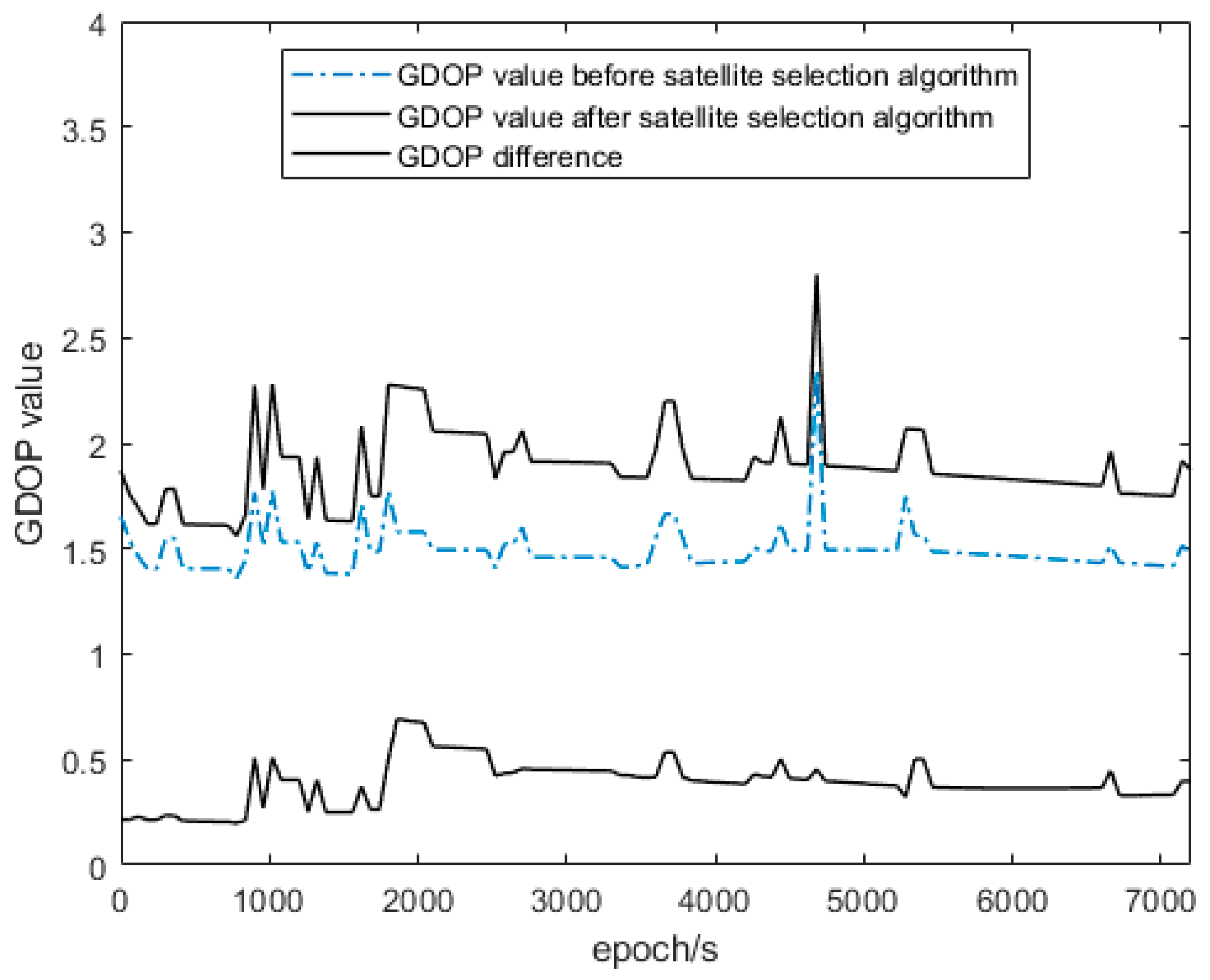
Figure 5.
Curve of GDOP value when the proportion of selected stars is 60%.
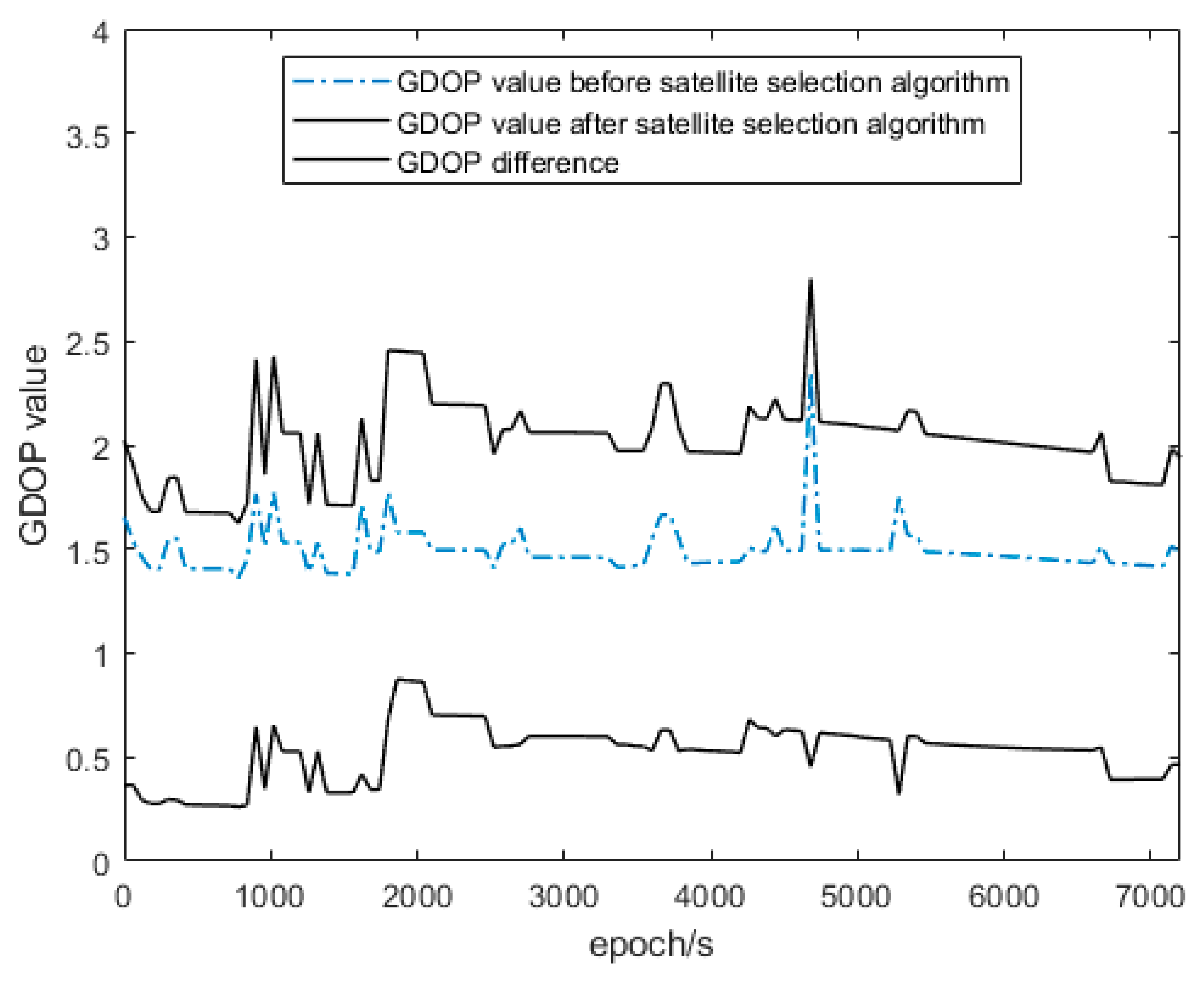
Figure 6.
Comparison of X-axis positioning error before and after the algorithm.
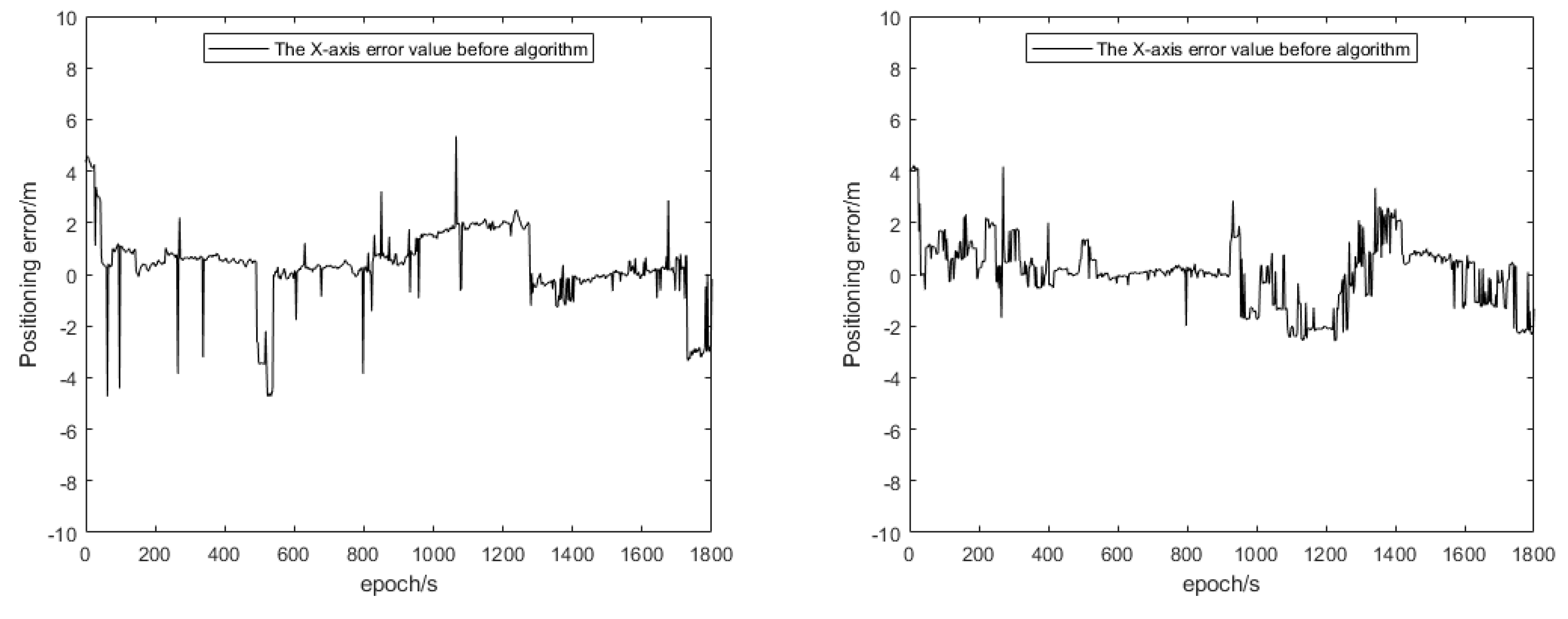
Figure 7.
Comparison of Y-axis positioning error before and after the algorithm.
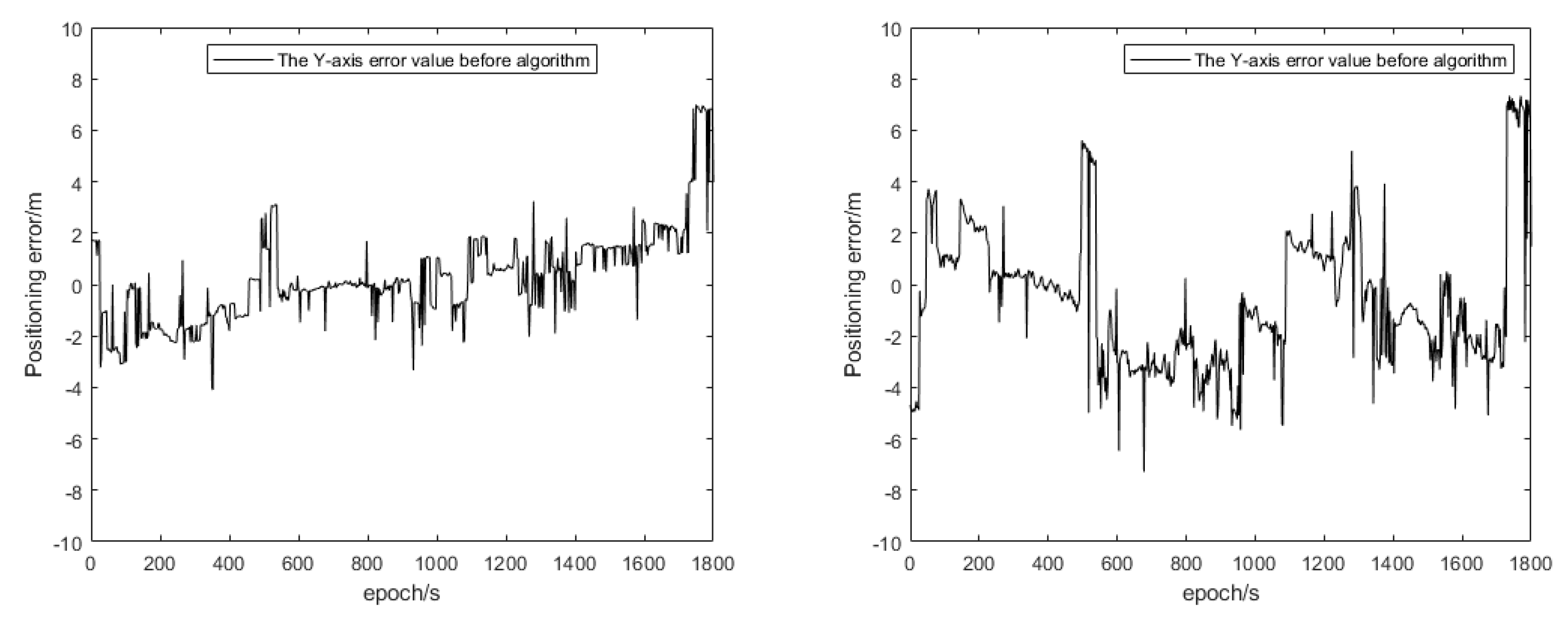
Figure 8.
Comparison of Z-axis positioning error before and after the algorithm.
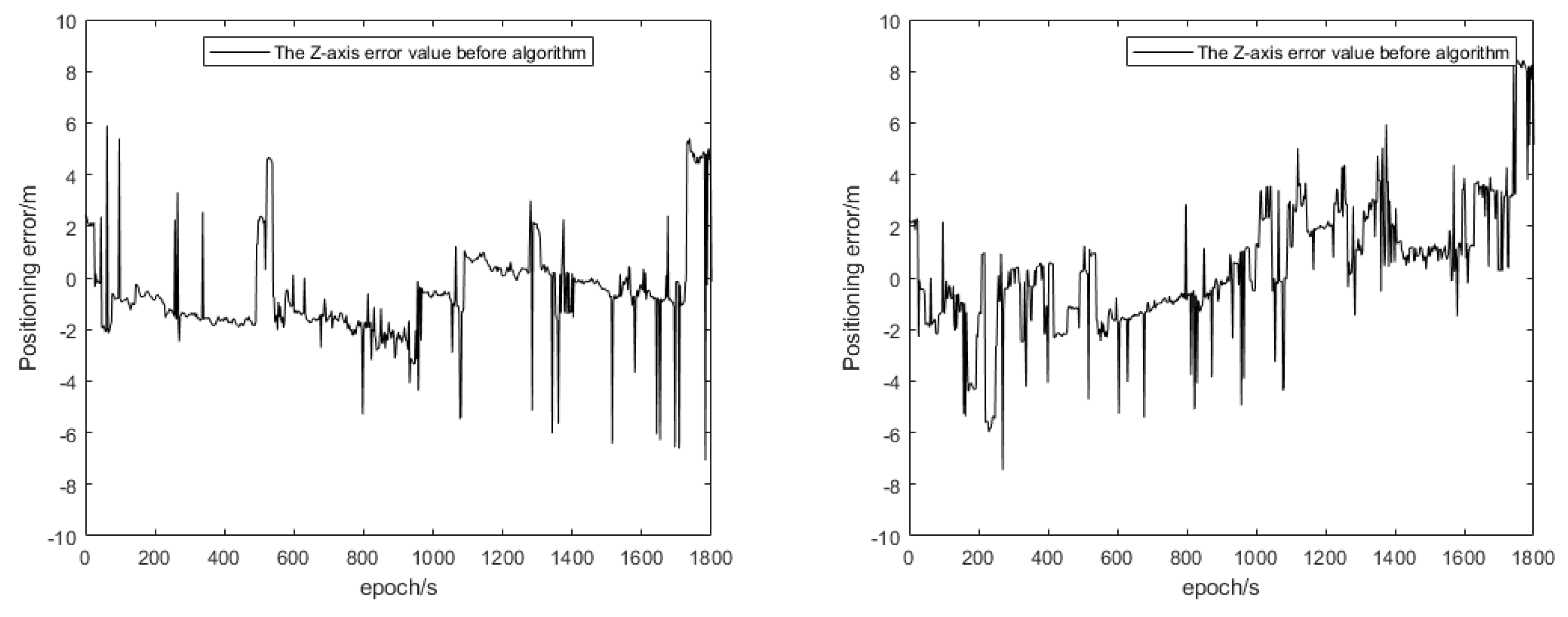

Table 1.
The relationship between GDOP value changes and satellite selection ratios.
| star selection ratio | 1 | 0.90 | 0.80 | 0.70 | 0.6 | 0.50 |
| Number of stars selected | 22 | 19 | 17 | 15 | 13 | 11 |
| GDOP | 1.661 | 1.779 | 1.818 | 1.919 | 2.143 | 2.686 |
| ΔGDOP | 0 | 0.118 | 0.157 | 0.258 | 0.482 | 1.025 |
Table 2.
Statistical analysis of GDOP values with different star selection ratios.
| Star selection ratio | GDOP | |||
| minimum value | maximum values | average value | ||
| pre-selection | 1.3607 | 2.3458 | 1.4975 | |
| 90% | post-star selection | 1.4281 | 2.6026 | 1.6421 |
| difference (the result of subtraction) | 0.0674 | 0.2568 | 0.1446 | |
| 80% | post-star selection | 1.4966 | 2.8376 | 1.7119 |
| difference (the result of subtraction) | 0.1359 | 0.4918 | 0.2144 | |
| 70% | post-star selection | 1.5608 | 2.8996 | 1.8863 |
| difference (the result of subtraction) | 0.2001 | 0.5538 | 0.3888 | |
| 60% | post-star selection | 1.6852 | 3.0841 | 2.1088 |
| difference (the result of subtraction) | 0.3245 | 0.7383 | 0.6113 | |
Table 3.
Computational complexity comparison between the best GDOP algorithm and the proposed algorithm.
Table 3.
Computational complexity comparison between the best GDOP algorithm and the proposed algorithm.
| Positioning error (m) | Optimal GDOP value method | Fast Star Selection Algorithm |
| X-axis | 0.8315 | 1.1539 |
| Y-axis | 1.5474 | 1.7790 |
| Z-axis | 2.2777 | 2.5045 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



