
Submitted:
12 June 2024
Posted:
13 June 2024
You are already at the latest version
Abstract
This study focuses on the design, development, and evaluation of an educational mobile robot, named Robot-T2, to be used in educational activities within a technical school. The primary objective was to create a versatile platform that allows students to explore programming, engineering, and science concepts in a practical and collaborative manner. The methodology included an iterative design and testing approach, incorporating feedback from students and teachers to continuously improve the robot's functionality. The tests covered autonomous navigation, line following, and object manipulation, using the OnBotJava programming software and the Control Hub as the main interface. The results demonstrated that Robot-T2 is highly efficient and adaptable in various educational contexts, showing remarkable precision in navigation and object manipulation. The design iterations significantly improved the robot's performance, enriching the educational experience and promoting active learning. In conclusion, educational robotics, represented by Robot-T2, has great potential to enhance the teaching and learning process in technical schools, fostering teamwork, problem-solving, and the integration of technology in the classroom. This project is expected to inspire future developments in educational robotics.
Keywords:
Robot
; Education
; Technical School: inclusive pedagogy
; mechatronics
1. Introduction.
The creation of an educational robot in a secondary technical school is a quite innovative and creative undertaking. Originality and innovation lie in how technology is used and how it is integrated into the educational process.
The real innovation lies in how the robot is used as an educational tool. How is it integrated into the curriculum? What skills are students developing through this project? Which is a bit extensive to develop in this article, we will only mention that the project is part of the PEI (Institutional Educational Project).
Collaboration between students and teachers was essential to the success of the project. The fact that they worked together to create the educational robot demonstrates an innovative approach to teaching and learning, encouraging collaboration, critical thinking and problem solving.
The impact that this project has had on the educational community is that it inspired other students and schools to embark on similar projects, thus fostering innovation and interest in robotics, mechatronics and technology education among young people.
Inclusive education focuses on providing equitable and accessible learning opportunities for all students, regardless of their abilities, background or disabilities (the school has students with various disabilities certified by professionals, who for obvious reasons of privacy and being minors age, will not be detailed). Teaching robotics in the context of inclusive education can offer several benefits and links:
1.1. Accessibility: Robotics can be an accessible educational tool for students with disabilities, as it allows adaptation and customization based on individual needs. For example, robots can be programmed to interact with different input/output devices that fit the motor skills of students.
1.2. Multi-sensory learning: Robotics provides a multi-sensory learning experience that can benefit a wide range of students, including those with special needs. Students can engage in hands-on activities that encompass programming, building, and problem solving, facilitating different learning styles.
1.3. Promoting social and collaborative skills: Teaching robotics often involves teamwork projects, which promotes social skills such as communication, collaboration, and teamwork. This can be especially beneficial for students with disabilities who may face challenges in social areas.
1.4. Developing cognitive and problem-solving skills: Robotics involves problem solving and critical thinking, which can help develop cognitive skills in all students, including those with special needs. Robot programming, for example, requires planning, sequencing, and problem solving, skills that are valuable for all students.
1.5. Building self-confidence and self-esteem: By participating in robotics activities and achieving success in programming and building robots, students can develop greater confidence in their abilities and greater self-esteem, which is especially important for those who may face additional challenges in the classroom.
In summary, teaching robotics in the context of inclusive education can provide a powerful platform for equitable learning and holistic development of all students, regardless of their abilities or capabilities.
On the other hand, mechatronics is a multidisciplinary branch of technology and engineering that encompasses the integration of systems from various fields of knowledge, such as electronics, mechanics, control and computing. Its objective is to develop devices and systems that combine these disciplines in a synergistic way. This discipline is not only limited to product development, but also focuses on creating intelligent control systems that can improve the efficiency and functionality of machinery used in a wide range of industrial and commercial applications. Mechatronics, therefore, aims to create products and processes that are more efficient, adaptable and versatile. This integration of disciplines aims to facilitate human activities through the development of automated and electronically controlled systems that can perform complex tasks autonomously or assisted.
Mechatronics has radically transformed the way we interact with technology in everyday life. Since its origin, the word mechatronics, formed by the Greek roots μηχανική (mecaniké, "mechanics") and τροπος (tropos, "form"), has evolved to become a fundamental pillar of technological innovation.
The background of mechatronics dates back to ancient Greece and is intertwined with the rich history of automation and engineering. From the automata of Heron of Alexandria to the ingenious mechanisms of Al-Jazari, humanity has for centuries sought ways to improve efficiency and precision through the combination of mechanics and electronics.
Today, mechatronics drives revolutionary advances in a wide range of industries, from medicine to manufacturing to space exploration. Mechatronics engineers not only design and build more complex machines, but also provide them with intelligence and adaptability through advanced control systems.
Within this vast field, robotics emerges as an exciting and constantly evolving specialty. From robotic arms used on assembly lines to humanoid robots capable of mimicking human behavior, robotics constantly challenges our notions of what is possible in the realm of automation.
Robots are an integral part of mechatronics. A robot typically combines mechanical components (such as joints and actuators), electronic components (such as sensors and control circuits), and software systems (for programming and controlling the robot). These systems work together in a coordinated manner to perform specific tasks, whether in industrial, service environments, or even home applications.
Mechatronics provides the theoretical and practical framework for the design, construction and control of robots, as it involves the combination of mechanical, electronic, computer and control engineering to create intelligent and functional robotic systems. Therefore, robots are considered an important application within the field of mechatronics, and the study of robots and their development is integrated within this multidisciplinary discipline.
The history of robotics is a story of amazing creativity and ingenuity in the ability of machines to interact with the world around us.
In a world where technology advances at a rapid pace, mechatronics and robotics continue to play a crucial role in shaping the future. From space exploration to healthcare, these disciplines challenge us to imagine a world where machines not only assist us, but also inspire and challenge us to reach new heights of innovation and discovery.
2. Theoretical Framework
Inclusive education refers to an educational approach that seeks to ensure equitable access to education for all students, regardless of their individual differences. On the other hand, teaching robotics in the educational context has emerged as a powerful tool to encourage active learning, problem solving, and the development of technical and cognitive skills in students. Combining these two approaches can have a significant impact on promoting the engagement and success of all students in the classroom.
Teaching robotics in an inclusive environment not only provides accessible learning opportunities for students with disabilities, but also fosters collaboration, critical thinking, and self-confidence in all students. By providing hands-on, multi-sensory activities, robotics can address a variety of learning styles and individual needs, thus promoting a truly inclusive educational environment.
Inclusive education refers to an educational approach that seeks to ensure equitable access to education for all students, regardless of their individual differences. On the other hand, teaching robotics in the educational context has emerged as a powerful tool to encourage active learning, problem solving, and the development of technical and cognitive skills in students.
Papert (1980) emphasized the importance of robotics in education by stating that "robots offer opportunities for children to learn actively and constructively, exploring complex concepts through practice and experimentation."
Robelia and Schmid (2003) noted that "teaching robotics can motivate learning in multiple areas of the curriculum, providing a hands-on, tangible experience that can be especially beneficial for students with different learning styles and individual needs."
Freire, Neves, and Ferreira (2017) highlighted that “robotics can play a crucial role in promoting educational inclusion by providing tools and resources that can be adapted to meet the specific needs of students with disabilities.”
Higgins and Boone (2018) found that “robot-assisted instruction can improve the participation and engagement of all students in the classroom, while providing opportunities for peer-to-peer collaboration and learning.”
Ferreira, Freire, and Neves (2020) concluded in their systematic review that “teaching robotics in inclusive environments can foster the development of social, cognitive, and technical skills in all students, thus promoting a truly inclusive educational environment.”
Mubin and colleagues (2021) noted that “educational robotics can be adapted to address a variety of individual needs, allowing the active participation of students with different skills and abilities.”
These quotes reflect how teaching robotics can be effectively integrated into an inclusive educational environment, providing significant benefits for all students, regardless of their skills or abilities.
3. Methodology
The methodological approach adopted for the development of the robot was iterative and collaborative. Students, under the guidance of teachers, actively participated in all stages of the process, from initial design to implementation and testing. Teamwork and problem solving were encouraged, allowing students to gain practical skills and engineering experience effectively.
The robot tests were carried out in a variety of simulated and real environments within the Technical School No. 2 “Independencia” in the city of Concordia, Entre Ríos. This included classrooms, laboratories and outdoor spaces, each presenting unique challenges to the robot's navigation and operation. A series of educational tasks, such as line following, obstacle avoidance, and autonomous navigation, were designed and executed to evaluate the robot's performance in different scenarios.
The main aspects of the methodological process are detailed below:
3.1. Initial design and component selection: The process began with the generation of initial ideas for the design of the robot, where both pedagogical requirements and technical considerations were taken into account. A careful selection of the components was made, considering functionality, accessibility and compatibility with the project.
3.2. Construction of the prototype: Based on the initial design, the prototype of Robot-T2 was built. This process involved the integration of selected components into a robust mobile platform, designed to support the load and ensure stability during movement.
3.3. Testing and evaluation: Testing was carried out in a variety of simulated and real environments within the Technical School No. 2 “Independencia” in the city of Concordia, Entre Ríos. These tests included scenarios such as classrooms, laboratories, and outdoor spaces, each presenting unique challenges to the robot's navigation and operation. A series of educational tasks, such as line following, obstacle avoidance, and autonomous navigation, were designed and executed to evaluate the robot's performance in different situations.
3.4. Feedback and adjustments: Regular feedback meetings were established with students and teachers to evaluate the robot's performance and identify areas for improvement. Feedback and suggestions received during these sessions were used to make adjustments to the robot's design and programming, with the goal of improving its functionality and adaptability.
3.5. Process documentation: Detailed documentation of the entire design, construction and testing process of the Robot-T2 was carried out. Records were kept of meetings, design decisions, tests performed and results obtained, using project management and collaboration tools to ensure traceability and transparency of the process.
3.6. User interface implementation: A programming software (OnBotJava) was integrated as the virtual interface between the human and the robot. This software allowed users to write and load Java code directly into the robot, making programming and communicating instructions easier.
In summary, the methodological process adopted for the development of Robot-T2 was iterative, collaborative and well documented, allowing the creation of a highly efficient and adaptable educational robot for use in pedagogical and educational environments.
4. Materials
The robot was built using a combination of standard robotics components, carefully selected to optimize the functionality and accessibility of the project. The robot structure was mounted on a robust mobile platform, designed to support the load of the additional components and ensure stability during movement. High-performance DC motors were used to drive the robot's wheels, providing excellent traction and maneuverability on a variety of surfaces.
To enable perception of the environment, various sensors were integrated into the robot's design. This included ultrasonic and infrared distance sensors for obstacle detection, as well as a line sensor for following predefined trajectories. These sensors were strategically placed on the robot to maximize coverage of the environment and provide accurate data for navigation and decision making.
The description of the list of typical parts that the construction of the robot needed in general terms was the following, taken from Rev Robotics:
- -
- Chassis: The base structure of the robot where all the components are mounted.
- -
- Motors: Motors provide the power to move the robot, in a variety of direct current (DC) motors and brushless direct current motors that can be used depending on the project requirements.
- -
- Wheels: The wheels allow the movement of the robot. Here we show a variety of standardized wheels, designed for different surfaces and purposes.
- -
- Sensors: These are devices that collect data from the robot's environment. These may include proximity sensors, distance sensors, color sensors, among others.
- -
- Controller (Control Hub): Acts as the brain of the robot, coordinating all functions and processing information from the sensors. It can also provide interfaces for robot programming and control.
- -
- Battery: Provides the energy necessary to power the motors and other electronic components of the robot.
- -
- Remote control or joystick: An input device that allows operators to control the robot's movement and actions remotely.
- -
- Servomotors: These are position control devices used to control the precise movement of moving parts of the robot, such as arms or grippers.
- -
- Circuit boards: These boards may be required to electronically mount and connect the different components of the robot, such as the controller, sensors, and actuators.
- -
- Wiring and Connectors: Wires and connectors are needed to connect all of the robot's electronic components, ensuring a proper and reliable electrical connection.
- -
- Expansion cards: These provide additional functionality, such as additional I/O ports, specific communication capabilities, or additional processing functions.
- -
- Fasteners: Screws, nuts, bolts and other fasteners are necessary to assemble and secure all robot components in place.
- -
- Tools: Basic tools such as screwdrivers, wrenches, pliers, etc., are necessary for assembly and maintenance of the robot.
- -
- Body or cover: Depending on the purpose and aesthetics of the robot, you may want to add a body or cover to protect the internal components and give it a more finished appearance (typical Industrial Design work, which could not be incorporated into this model mechatronic).
- -
- Wireless communication modules: As the robot was needed to communicate wirelessly with other devices or like the Control Hub, so Wi-Fi wireless communication modules were selected.
In summary, while the initial list provided covers the essential components, additional items may be required to complete the robot based on project specifications and specific performance and design needs.
Figure 1.
Some parts of Robot-T2: (02) Arm Motors, (03) Control Hub, (05) and (06) Drive Motors, (07) Servo Claw Servo, (08) Battery. Source: Own elaboration from pieces and parts of a standardized GrabCAD model from RevRobotics.
Figure 1.
Some parts of Robot-T2: (02) Arm Motors, (03) Control Hub, (05) and (06) Drive Motors, (07) Servo Claw Servo, (08) Battery. Source: Own elaboration from pieces and parts of a standardized GrabCAD model from RevRobotics.
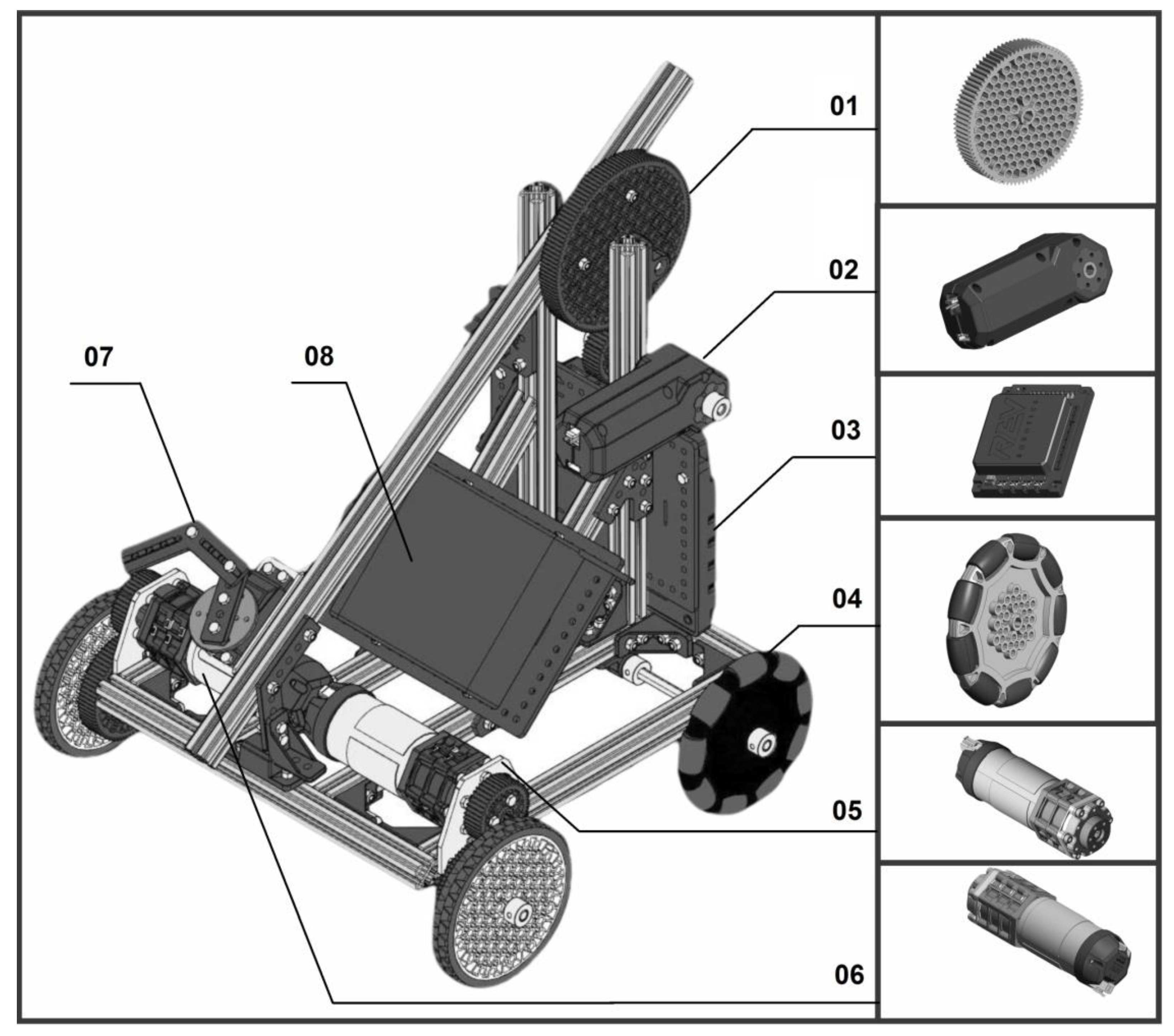
Figure 2.
Parts described in Figure 1, which make up the list of materials, are seen in detail. Source: Own elaboration based on standardized GrabCAD parts from RevRobotics.
Figure 2.
Parts described in Figure 1, which make up the list of materials, are seen in detail. Source: Own elaboration based on standardized GrabCAD parts from RevRobotics.

5. Results and Discussion
Test results demonstrated that the robot is highly efficient and adaptable in a variety of educational situations. During autonomous navigation tests, the robot was able to accurately map its environment and effectively avoid obstacles using data collected by its sensors. Furthermore, during line following activities, the robot demonstrated an exceptional ability to follow predefined trajectories with remarkable accuracy.
The robot's ability to interact with the environment was also highlighted by study participants. During object manipulation tests, the robot was able to successfully pick up and transport objects of different shapes and sizes, demonstrating its versatility and applicability in a variety of educational contexts.
Additionally, significant improvements in robot performance were observed throughout the design iterations. The feedback received from students and teachers during the tests was fundamentally important to identify areas of improvement and make adjustments to the design and programming of the robot. This iterative approach not only improved the functionality of the robot, but also enriched the educational experience of the participants, promoting active learning and problem solving in the context of educational robotics.
In the context where OnBotJava was used as programming software and integrated with the Control Hub and Joysticks, the main interface between the human and the robot consisted of two main components:
- -
- Programming Software (OnBotJava): OnBotJava serves as the virtual interface between the human and the robot. Through this software, users can write and upload Java code directly to the robot. It provides an online graphical user interface that allows humans to write and edit code, as well as debug and monitor robot behavior in real time. OnBotJava makes it easy to program the robot and communicate user instructions to the robot hardware.
- -
- Control Hub: The Control Hub acts as the physical interface between the human and the robot. This device provides the connection ports necessary to connect the robot to controllers and other external devices such as sensors and actuators. Through the Control Hub, users can connect Joysticks or other control devices to send commands to the robot during its operation.
Figure 3.
From the Control-Hub. Source: Own elaboration from standardized RevRobotics parts.
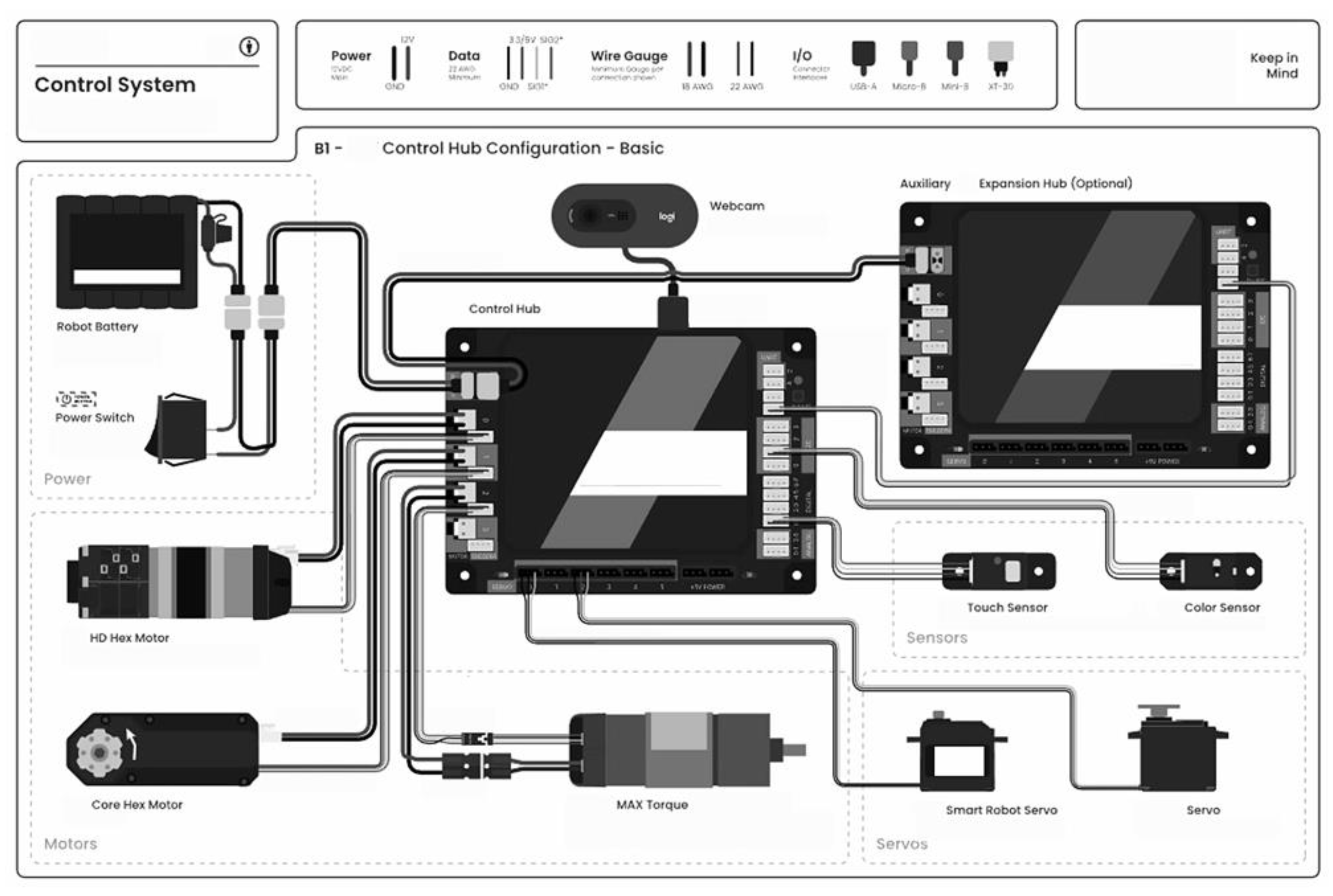
Control-Hub is a control and programming platform used in robotics and other automation projects. It is used to control and coordinate the robot's motors and sensors and to program its behavior. The Control-Hub consists of a central processing unit, sensors and actuators, as well as a programming interface.
The Control-Hub is a structure that houses the electronic components. It works with a specific programming language called OnBotJava, which allows the robot to be programmed easily and quickly using predefined blocks of code.
Additionally, the Control-Hub is equipped with a tablet and remote controls that allow the user to control and program the robot remotely. Creating a private Wi-Fi network between the Control-Hub and the tablet and controls allows for reliable and secure communication between these devices.
Figure 4.
Image of the screenshot, a block programming language called OnBotJava was used that accelerates programming times and limits human errors when typing commands, said environment comes loaded in a Control-Hub along with a Tablet and remote controls.
Figure 4.
Image of the screenshot, a block programming language called OnBotJava was used that accelerates programming times and limits human errors when typing commands, said environment comes loaded in a Control-Hub along with a Tablet and remote controls.
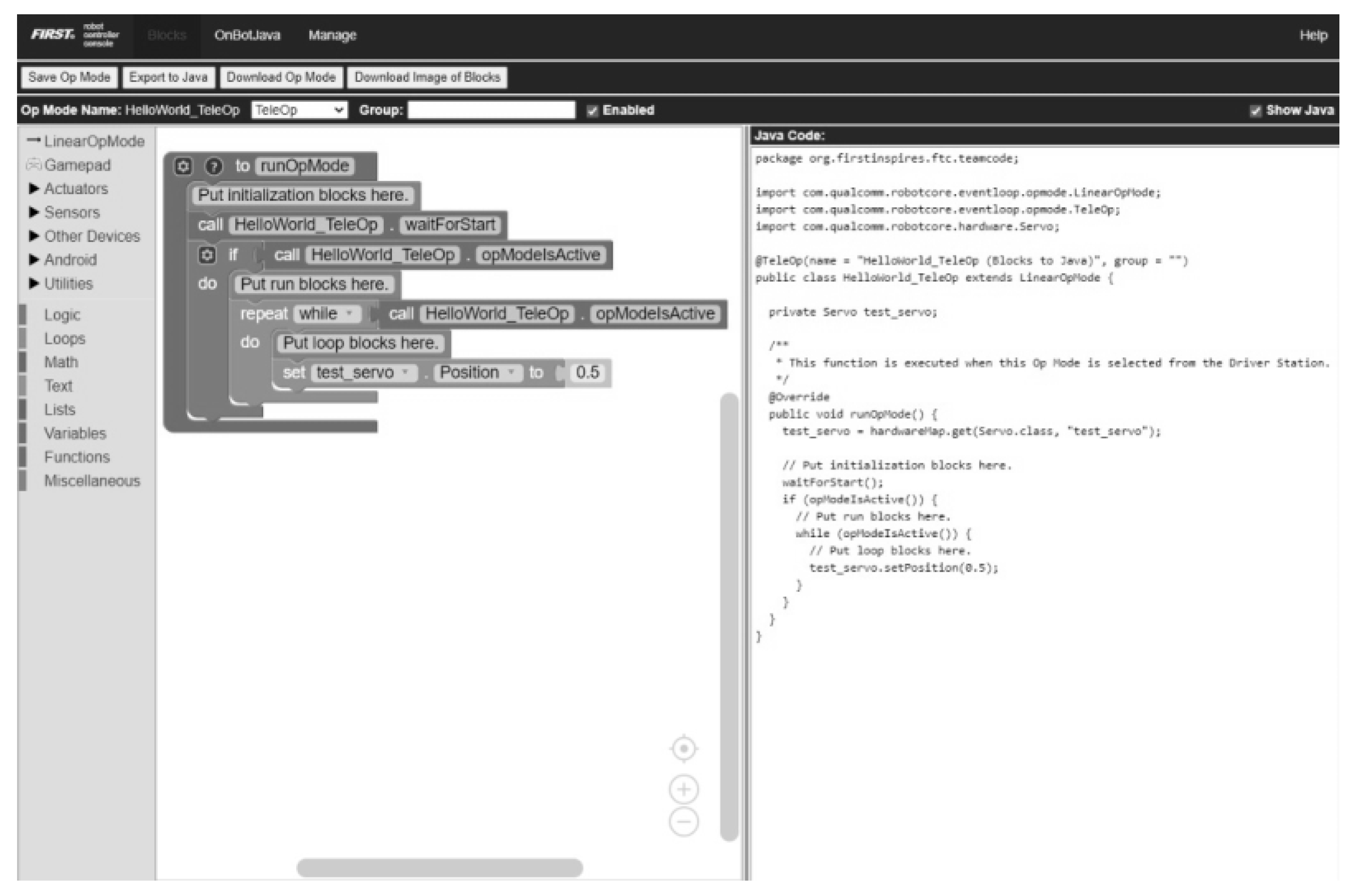
Figure 5.
Photos of students programming in OnBotJava for Robot-T2 and operating the robot with the Joystick. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
Figure 5.
Photos of students programming in OnBotJava for Robot-T2 and operating the robot with the Joystick. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.

Figure 6.
Wheels of Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
Figure 6.
Wheels of Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.

Figure 7.
Different models of interchangeable traction wheels for possible use. Source: Own elaboration based on standardized GrabCAD parts from RevRobotics.
Figure 7.
Different models of interchangeable traction wheels for possible use. Source: Own elaboration based on standardized GrabCAD parts from RevRobotics.

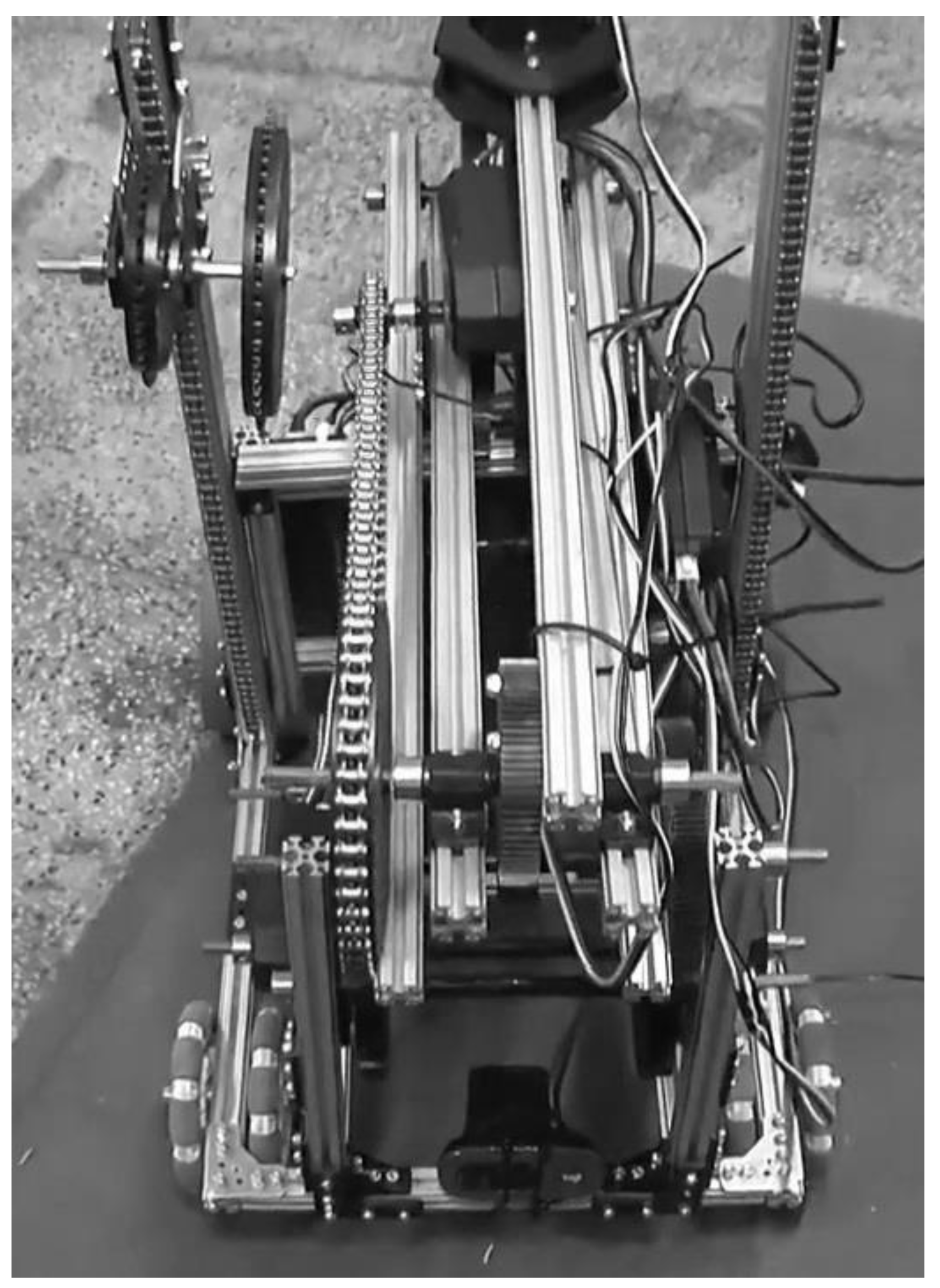
Figure 8.
Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
Figure 8.
Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
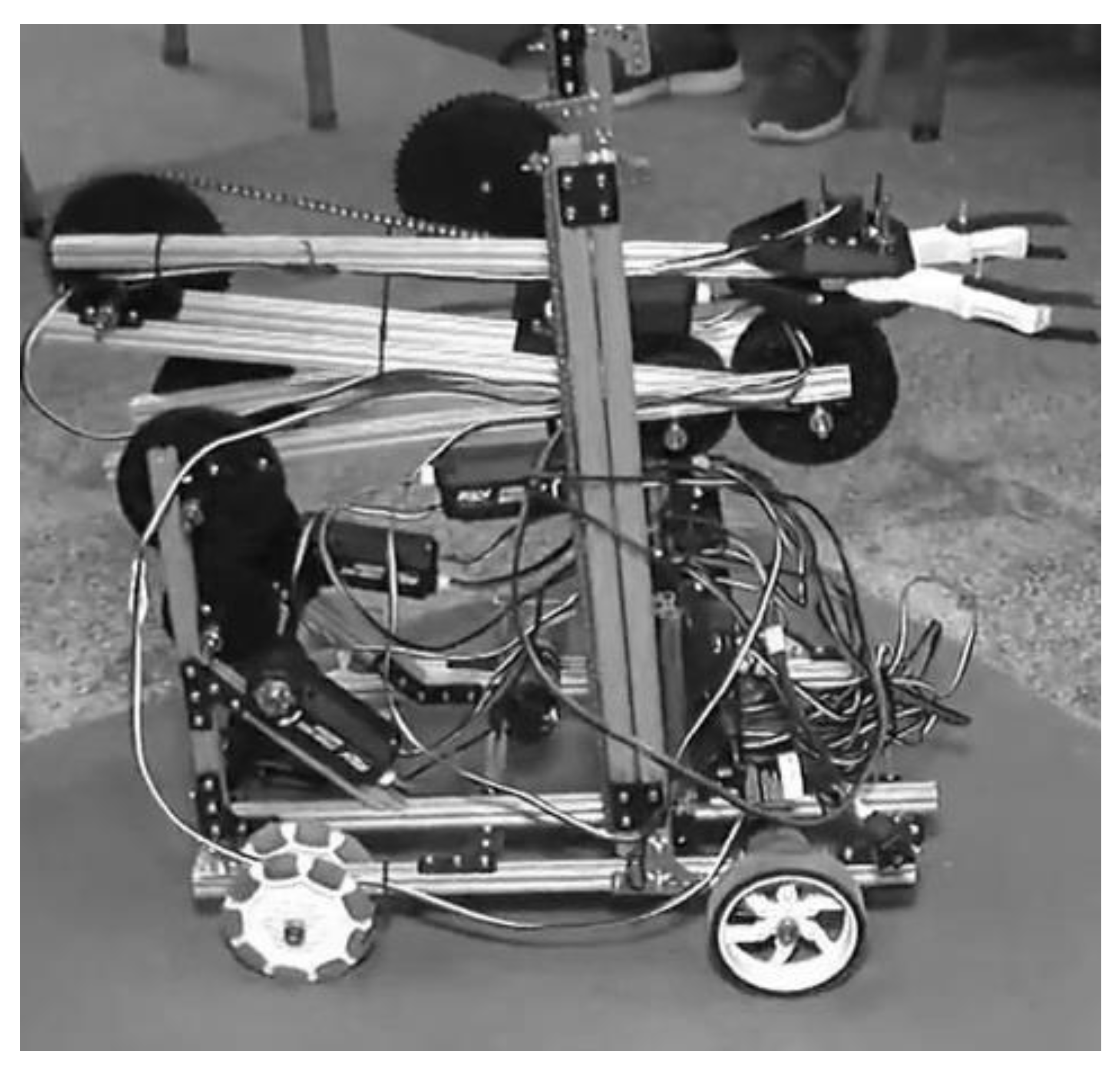
Figure 9.
Claw. Source: Own elaboration based on standardized GrabCAD parts from RevRobotics.
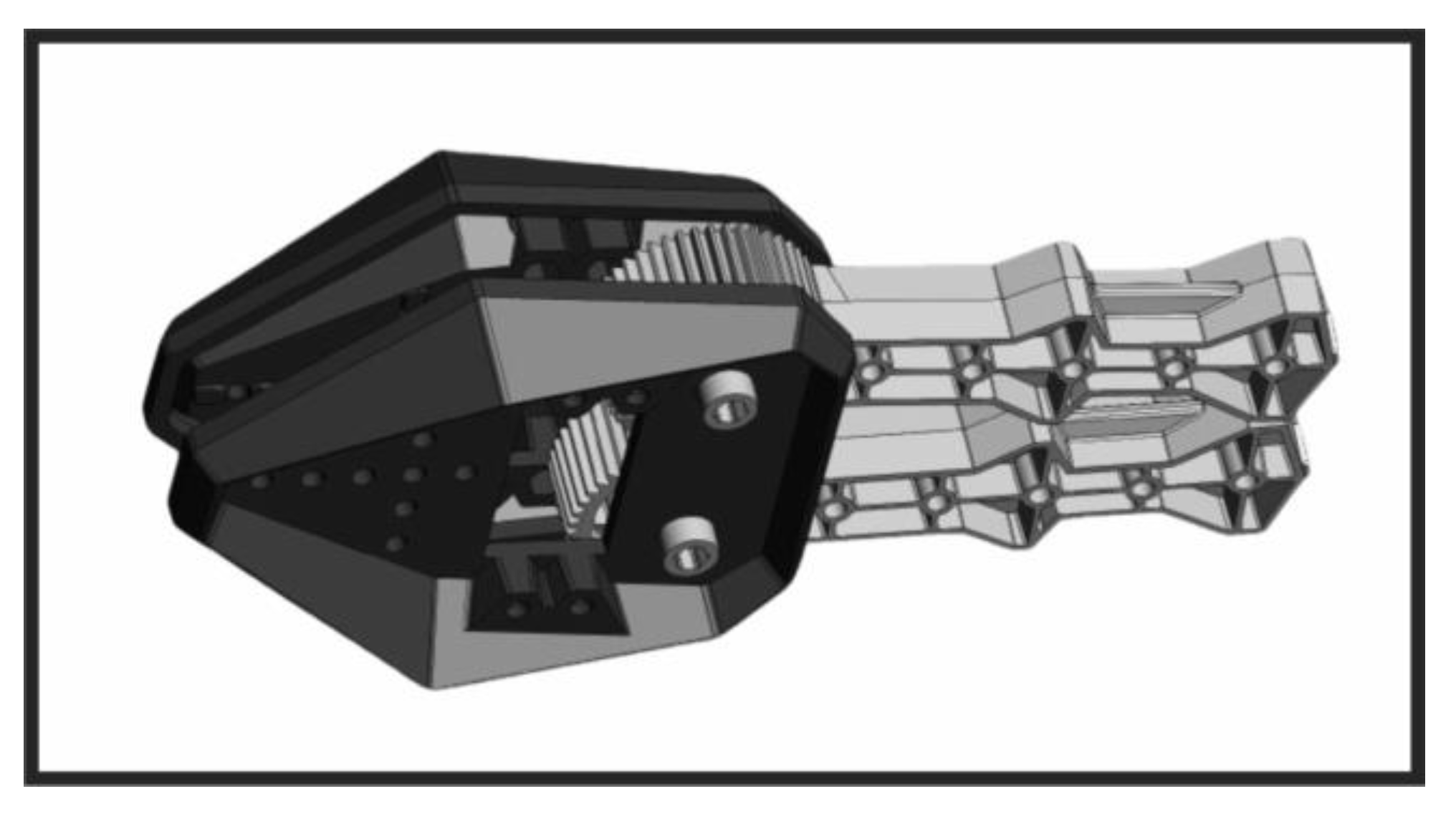
Figure 10.
Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
Figure 10.
Robot-T2. Source: Own elaboration formed from the work of Professor Luis Ponti with his students.
6. Conclusion
Educational robotics is a powerful tool to foster interdisciplinary learning and develop practical skills in students. In this context, the present study focused on the creation of a mobile robot designed to be used in educational activities within a technical school. The main objective was to provide a versatile and accessible platform that allows students to explore programming, engineering and science concepts in a practical and collaborative way.
Although Robot-T2 does not necessarily resemble an android in terms of human appearance, it shares the characteristic of being a programmable machine that performs specific tasks, which places it in the context of the evolution of robots from ancient times to the present day.
Robot-T2 was used in a variety of applications including demonstrating its technical skills, from technology education to robotics competition. Its integration into modern culture, especially in the robotics community of the UTN (National Technological University, Concordia Campus) and technological education of the Technical schools; reflects the wide acceptance of the robot in the educational community.
While not as large or sophisticated as an industrial robot, its design and technology reflect advances in robotics and automation. Additionally, its ability to be programmed and customized shows how robotic technology has become more accessible and versatile (human-friendly). What we call the interface.
The relationship between mechatronics and robotics has been fundamental for the development and evolution of these intelligent machines. The combination of mechanical, electrical and software engineering has allowed the creation of robots that can perform complex tasks with precision and efficiency.
Over the years, robots have evolved from simply automation tools in industrial settings to home companions and co-workers. From the first automata to humanoid robots marketed as pets, the variety and versatility of these machines is astonishing.
In education, building and programming robots not only teaches technical skills, but also encourages critical thinking, problem solving, and collaboration. Projects like creating a robot from scratch at a technical school engage students and teachers in a hands-on, rewarding learning process.
This specific project demonstrated how the application of mechatronics and robotics concepts can be transformed into a meaningful and concrete educational experience. By collaborating to build and program a robot, participants not only gain technical knowledge, but also develop transferable skills that will be valuable in their future careers.
In short, the history of robots and their relationship with mechatronics is a testament to the power of engineering and human creativity. As we continue to explore the limits of what robots can achieve, it is important to remember the critical role that education and collaboration play in this exciting field of study.
In conclusion, the development and evaluation of this mobile robot demonstrate the potential of educational robotics to enrich the teaching and learning process in technical schools. Collaboration between students and teachers in designing and testing the robot not only improved its functionality, but also promoted teamwork and problem solving. It is hoped that this work will inspire future educational robotics projects and encourage greater integration of technology in the classroom.
7. Acknowledgments
The author thanks Professor Luis Ponti and his students for the rights to the images of their work. Also to the Director of the educational establishment, School of Technical Education No. 2 “Independencia”: Prof. Patricia Peña (for her trust placed in the professionalism of the work team and her collaboration in giving up the times and work spaces of the Laboratory and Workshop of Computing, robotics, 3D printing).
Without ignoring the entire educational community of EET No. 2.
References
- Ahmad, M. I., & Larsson, T. (2017). Enhancing student engagement through educational robotics. En Proceedings of the 12th International Conference on Robotics and Automation in Education (pp. 76-81). [CrossRef]
- Alimisis, D., Moro, M., Menegatti, E., & Pina, A. (2007). Introducing robotics to teachers and schools: Experiences from the TERECoP project. International Journal of Technology and Design Education, 17(2), 15-30. [CrossRef]
- Anderson, I. F. (2019). Eco-turbina. Turbo ventilador eléctrico 220 (VAC)–50 (Hz), de bajo consumo: eficiente energéticamente. Innovación y Desarrollo Tecnológico y Social, 1(1), 1-28. [CrossRef]
- Anderson, I. F. (2019). Mejoras de eficiencia energética (EE) en los motores monofásicos sincrónicos de 220 (VAC)/50 (Hz), tipo PMSM. Revista UIS Ingenierías, 18(4), 57-70. [CrossRef]
- Anderson, I. F. (2019). Diseño industrial mecatrónico y eficiencia energética (EE). En IX Jornadas de Investigación en Disciplinas Artísticas y Proyectuales (JIDAP), pp. 1-10.
- Anderson, I. F. (2021). 1º Premio Nacional INNOVAR 2021 de la Agencia Nacional I+D+I – MINCYT Nación: extractor de aire centrífugo, para ambientes contaminados con SARS-CoV-2, de alta eficiencia energética. En X Jornadas de Investigación en Disciplinas Artísticas y Proyectuales (JIDAP), pp. 1-11.
- Anderson, I. F. (2022). Diseño industrial y electromecánico de un extractor de aire centrífugo de alta eficiencia energética para ambientes con Covid-19. Investigación Aplicada e Innovación I+i: TECSUP, 16, 44-57.
- Anderson, I. F. (2022). Energy Efficient Centrifugal Air Extractor for Environments Contaminated With Sars-Cov-2 (Coronavirus). How to Build a Motor That Saves Electricity. Preprints, 1-31. [CrossRef]
- Anderson, I. F. (2022). Hertzian Motor: An Innovative Method to Obtain an Energy Efficiency of 90%, in Savings in Single-Phase Active Energy (Kwh), If The “Fan Law” Is Applied To PMSM- Type Synchronous Motors Without The Need to Apply The Use of Variable Frequency Drives (VFD). Preprints, 1-58. [CrossRef]
- Anderson, I. F. (2023). Extractor de aire centrífugo energéticamente eficiente para ambientes contaminados con SARS-CoV-2 (Coronavirus). Innovación y Desarrollo Tecnológico y Social, 4(2), 20-67. [CrossRef]
- Anwar, S., & Bajracharya, R. (2020). Robotic education and its influence on students’ learning motivation and skills development. International Journal of Advanced Computer Science and Applications, 11(8), 35-42. [CrossRef]
- Arlegui, J., Balaguer, C., & Saltarén, R. (2011). Robotics in education: Engineering students' improvements through projects. En Proceedings of the 7th International Conference on Research and Education in Robotics (pp. 1-10). [CrossRef]
- Atmatzidou, S., & Demetriadis, S. (2016). Advancing students' computational thinking skills through educational robotics: A study on age and gender relevant differences. Association for the Advancement of Artificial Intelligence.
- Benitti, F. B. V. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers & Education, 58(3), 978-988. [CrossRef]
- Chambers, J., Carbonaro, M., & Rex, M. (2007). Scaffolding Knowledge Construction through Robotic Technology: A Middle School Case Study. Canadian Journal of Learning and Technology, 33(3). [CrossRef]
- Eguchi, A. (2014). Educational Robotics for Promoting 21st Century Skills. Journal of Automation, Mobile Robotics and Intelligent Systems, 8(1), 5-11. [CrossRef]
- Freire, J. P., Neves, P., & Ferreira, M. J. (2017). Robotics for Education and Training in Inclusive Settings. En Advances in Intelligent Systems and Computing (Vol. 549, pp. 661–670). Springer.
- Higgins, K., & Boone, R. (2018). Robot-Assisted Instruction: Results from a School-Based Field Trial. Journal of Special Education Technology, 33(1), 30–41.
- Kim, Y., & Baylor, A. L. (2006). Pedagogical agents as learning companions: The role of agent competency and type of interaction. En Proceedings of the 7th International Conference on Learning Sciences (pp. 414-420). International Society of the Learning Sciences. [CrossRef]
- Mubin, O., Stevens, C. J., Shahid, S., Mahmud, A. A., & Dong, J. J. (2013). A review of the applicability of robots in education. Technology for Education and Learning, 1(1), 1-7. [CrossRef]
- Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., Dong, J. J., & Hu, J. (2021). A Systematic Review of Educational Robotics for Inclusive Education: Current Status and Future Perspectives. Robotics, 10(2), 81.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



