
Submitted:
13 June 2024
Posted:
14 June 2024
You are already at the latest version
Abstract
The Digital electronics collaborative enhanced learning (DECEL) project has recently developed an international collaborative education course. Its main objective is to enhance the digital electronics skills of international students by working on a complex, multidisciplinary applied problem using a mixed digital architecture. We have developed a logic level synthesis and dedicated software layers on the Red Pitaya FPGA platform. The diversity of digital concepts to be implemented, from hardware description language (HDL) to high-level languages such as Python or Matlab, forced the students to work together and rapidly improve their skills. Their motivation was fueled by the curiosity of controlling an ultrasound probe to obtain ultrasound signatures. This particular physics, little known to the students, was an additional source of curiosity. The goal of forming an image in a liquid medium was an additional motivating factor for them. The students reported that they learned a lot from the experiment. Thus, the technical parts and pedagogical results are documented in this work for reproducibility.
Keywords:
Digital
; System
; Electronics
; FPGA
; Ultrasound
; International
; collaborative
; education
1. Introduction
Collaborative problem solving is a pedagogical method that has been used for a long time with ancient or modern tools [1,2,3]. Recently, digital open source software and electronic platforms have contributed to enlarge project capabilities and facilitate prototyping [4,5,6]. Learning by doing, making, experiencing, or prototyping is now really encouraged in many engineering institutions [7,8]. In some cases, collaborative working requires the use of physical or virtual tools, and remote interaction with a team member, mentor or pear. Remote access and virtualization are sometimes used as emergency tools for collaboration or learning [9]. In addition, blended learning is based on technological solutions that add advantages such as flexibility and accessibility [10,11], but some disadvantages may appear due to the lack of direct human interaction [12]. The Erasmus+ project called Digital Electronics Collaborative Enhanced Learning (DECEL) is devoted to address these aforementioned aspects into an international context with four Universities involved (respectively Porto, Alcalà de Henares, Tours and Ferrara). This project aims to (1) experiment and enhance teaching activity through novel pedagogical tools applied to Digital Electronics. (2) Apply new teaching methods to internationalize our courses using Collaborative Online International Learning (COIL [13,14]). Create Open Educational Resources (OER) [15] related to digital electronics ecosystem. Develop Real Remote Labs (RRL) [16], more than virtual labs [17] for a massive use of hardware resources. One initial objective is to promote the student-student interaction from an international perspective. This interaction can be both physical and remote and we experienced it within the project. Thus, in this manuscript we will communicate on our first collaborative experiment with professors and students, present the original application chosen and the learning ecosystem in place. Finally, we will evaluate student’s achievement, satisfaction and valuable outcomes for professors interested to reproduce parts of pedagogical packages developed and tested in this context.
2. Blended Collaborative Learning Approaches
2.1. Mixed Approaches
The diversity of pedagogical practices and methods enhances the training experience and ensures adaptability to different profiles and contexts [18]. Remote courses and online pedagogical activities are a powerful option for student accessibility but with some limits in term of period of time, age, and social environment [19]. Face-to-face learning activities allow for social interaction and promote student life, but can be time and space restrictive [20]. Therefore, during the first part of DECEL, we have implemented a blended approach using an online platform with resources, some live remote sessions and classes with professors and peers, and a full week of face-to-face presentations, classes, and labs for student projects. This last event took place in Tours, France from July 3 to 7, 2023. A complex topic, unknown or hardly known to the students, was chosen in connection with a complex problem: how to see in dark waters with ultrasound imaging?
Nowadays, digital ultrasound portable systems are a condense of digital technology, signal processing and embedded system (e.g. FPGA1-based [21]). This require a transversal approach from components to hardware system and from Hardware Description Language (HDL, [22,23]) to Python post-processing for instance [24]. This topic allows to open a new world to the students, stimulating their curiosity while strongly reinforcing the digital electronic skills. The pedagogical experiment reported here was opened for 20 international students (5 of each Universities involved in the ERASMUS+ project). Five teams of 4 international students from bachelor, master and doctoral candidates were made to represent each university in each team and each academic level. In addition, the apprehension of the difficulty has been conducted step by step for an incremental student skill up that required a year of preparation for the professors in charge of this first pedagogical experience.
2.2. Platform and Online Courses
A dedicated online Moodle platform [25] was used to organize and compile content about the ultrasound application, the digital platform used, details of the hardware and implementation, tutorials, and an initial functional solution described in Section 3 and documented in the Appendices. The online content was divided into two courses (Figure 1). The first one supported the preparatory course. It was linked to a live remote session where some general information was given and concepts were taught. Generalities about Ultrasounds, details of the technology, digital platform on which students developed and overview of the project were presented to the students during this session, some additional resources, were also documented to satisfy students curiosity. A session for questions was also done and exchange between students was continued in a remote way after this session. The exchanges with the professors were done through emails, while the students communicate through a chat applications before even meeting them face to face. In a way, the remote preparatory session was the foundation of the next pedagogical and social achievement of this intercultural experiment. The second course hosted on the Moodle platform was supporting the face-to-face activities (documentation, tutorials, videos, etc.)
2.3. Face-to-Face Pedagogical Approach and Details
The DECEL week includes 28 hours of face-to-face activities. One third of it is dedicated to lectures (deep learning embedded in low computational hardware, digital architecture for ultrasound systems, etc.). 19 hours were dedicated to 3 guided tutorials and 3 project sessions. The goal of the project was to improve as much as possible the basic ultrasound imaging system given to each team (and detailed in the next session). The first guided session provided all the information needed to connect to the system, use the standard hardware and software implemented, and understand the signal expected for a 1D pulse-echo ultrasonic system in water. The second tutorial added one dimension. The scanning of an ultrasonic probe using a servo motor was explained to the students and a basic static 2D image was recorded and displayed. The last tutorial was to detail the dedicated hardware implementation (Verilog code deployed on FPGA) given to the students and the standard C code developed for a simple interaction with the FPGA involved in the ultrasonic signal processing and servo motor driving. After this last guided session, the students were able to customize their project in order to optimize it in different ways. Improvements were made in image quality, resolution, refresh rate and reconstruction. At the end of the week, each team of students produced a poster, a short video presenting their solution and were interviewed by the professors of the consortium. Note that in the middle of the week (Figure 2), on Wednesday afternoon, social activities were proposed to take a breath away from deeptech and to see some Loire valley castle and some old machines invented by Leonardo Da Vinci. The students had a Bachelor 3, Master 1 or 2 profile. Some were already familiar with reconfigurable electronics and FPGAs, while others had a more instrumentation-oriented profile. The complementary nature of the profiles was a great help in dealing with a multidisciplinary topic. The role of the students in each group was defined by them. In practice, most of them chose to work in pairs on two complementary subsections in parallel to speed up the project tasks (e.g. T1: servo control, T2: time-proportional signal acquisition, T3: midleware adaptation in C, T4: post-processing and image display). These developments took place during project sessions marked in green in the timetable (Figure 2).
2.4. System Overview
The dedicated ultrasound imaging system (Figure 3) used by the students is built around a Red Pitaya board. This platform, based on Xilinx Zynq 7010 FPGA, is well suited for educational [26] or research prototyping contexts [27,28]. It comes with default FPGA configuration, embedded Linux distribution that runs low level routines that manage high frequency inputs and outputs or multiple GPIO. A web API, server and Jupyter instance are also running on the board. In this project, we have completely reprogrammed the FPGA and developed dedicated low level routines to include the servo motor control. The general working principle of the imaging system is as follows: (1) The TRIG signal emitted by the Red Pitaya board triggers the RF pulse generated by the signal generator (typically 2 sine cycles at 2.24 MHz with 20 Vpp). (2) Once the ultrasonic pulse is propagated in the water, it returns to the piezoelectric transducer when reflected from any object. The echo signal passes through (3) a high-pass filter coupled with a diode limiter, and is then amplified by a low-cost NXP integrated low-noise amplifier (30 dB, BGA28XX chip family). This amplified echo signal is then recorded by the (4) fast analog input of the Red Pitaya board. The recorded vector corresponds to one RF line acquired for one probe angle. The probe angle is then incremented sequentially with the servomotor (5) and one RF line is acquired for each angle. A basic B-mode image (6) can then be reconstructed by combining the absolute values of all RF lines over time with respect to the angle. As this is an angular scan combining a series of acquisitions for each angle, image correction can be applied by students, as in Figure 3.6. In practice, image correction, post-processing, and various hardware or software improvements could be set up or implemented in codes by the students to obtain better images. This implies to discover deep enough the HDL and software dedicated layers implemented by default by the professors in the Red Pitaya board.
2.5. FPGA-Based Modified HDL System on Redpitaya Board
The default digital environment offered by Red Pitaya, is barely used in our project. The dedicated developments made in Verilog and C code are case-studies that have been presented to the students and then used and slightly modified by them. In facts, the default Red Pitaya FPGA binary doesn’t handle PWM outputs on any GPIO. Thus, a PWM output block has been implemented into the FPGA in order to drive the angle or the ultrasonic probe, connected to the extension connector of the board (Figure 4). We have also implemented an output TRIG signal that drive the HF pulse signal emission, then applied to the ultrasonic probe. Additionally, the acquisition process on the FPGA has been tuned. The real time averaging has been implemented when decreasing the sampling frequency (maximum = 128 MS.s-1). For the ultrasound application, 32 MS.s-1 is sufficient. Thus an averaging factor of 4 is applied when selecting this sampling rate.
A dedicated Vivado project has been prepared (all details are given in the Appendices). The minimum level of modification that students had to do was to personalize the value of the register named SYSTEM_HWID. The implemented architecture was explained block after block to the students, focusing on high frequency signal acquisition which had to be correctly setup in order to get good enough ultrasonic image resolution. The register table (Table 1 in Appendices section) implemented was also documented and presented. After the synthesis of the Verilog program is completed, the generated bitstream could be loaded into the FPGA throw terminal.
2.6. Software Implemented Operations and Functionalities Offered to Students
The students could interact with the registers either on the command line or using a program written in C that sequences the signal acquisition process for each angle (servo motor displacement, trig signal emission, and echo acquisition). The first student had to compile and test the given program written in C, run it and collect all the RF lines for each angle. They could adapt the standard Matlab post-processing program to plot a 2D image. The default acquisition process implemented allowed to see up to the 6th acoustic echo with poor depth resolution (Figure 5). Therefore, the student was able to modify the sampling frequency, the averaging factor, the angle scan aperture, and the post-processing and image reconstruction strategies to (1) increase the refresh rate and (2) improve the image quality. In practice, the servomotor performs an angular scan, combining a series of acquisitions for each angle. In Figure 5, no image correction is applied, and the depth and temporal resolution are not matched. These first images, which can be obtained quickly by students, are a starting point for improvement.
3. Results
3.1. Students’ Achievement and Deliverables
Twenty international students participated in a course in Tours (the four above-mentioned universities are represented in all the groups formed), where five international teams were formed. They had to solve a design for the detection and recognition of underwater objects, covering aspects of signal processing, sensors, digital systems and reconfigurable hardware. In addition to this challenge, the participants received various seminars from leading technology companies such as ST Microelectronics or Vermon. The experience allowed the students to work in teams with colleagues from other European universities, combining experience and knowledge in different engineering disciplines, as well as learning about new electronic devices for signal acquisition and processing. More specifically, during the training, the students improve their social and technical skills to collaborate and manage their project. After one week of work, each team of students succeeds in mastering the dedicated ultrasound imaging system (fully detailed in the Appendices section) and the explanation of the required instrumentation. They improve the reconfigurable digital electronic and software parts to produce good enough images (Figure 6) and are able to understand and reconfigure the complex system in place.
Oral assessment was carried out by the professor of the European project consortium in order to challenge the students' knowledge and results. At the end of the project, 20 students produced high quality deliverables such as posters (see appendices), videos and oral presentations (documented in the Appendices). In addition, the students’ feedbacks expressed are summarized in the next section.
3.2. Students’ Feedbacks
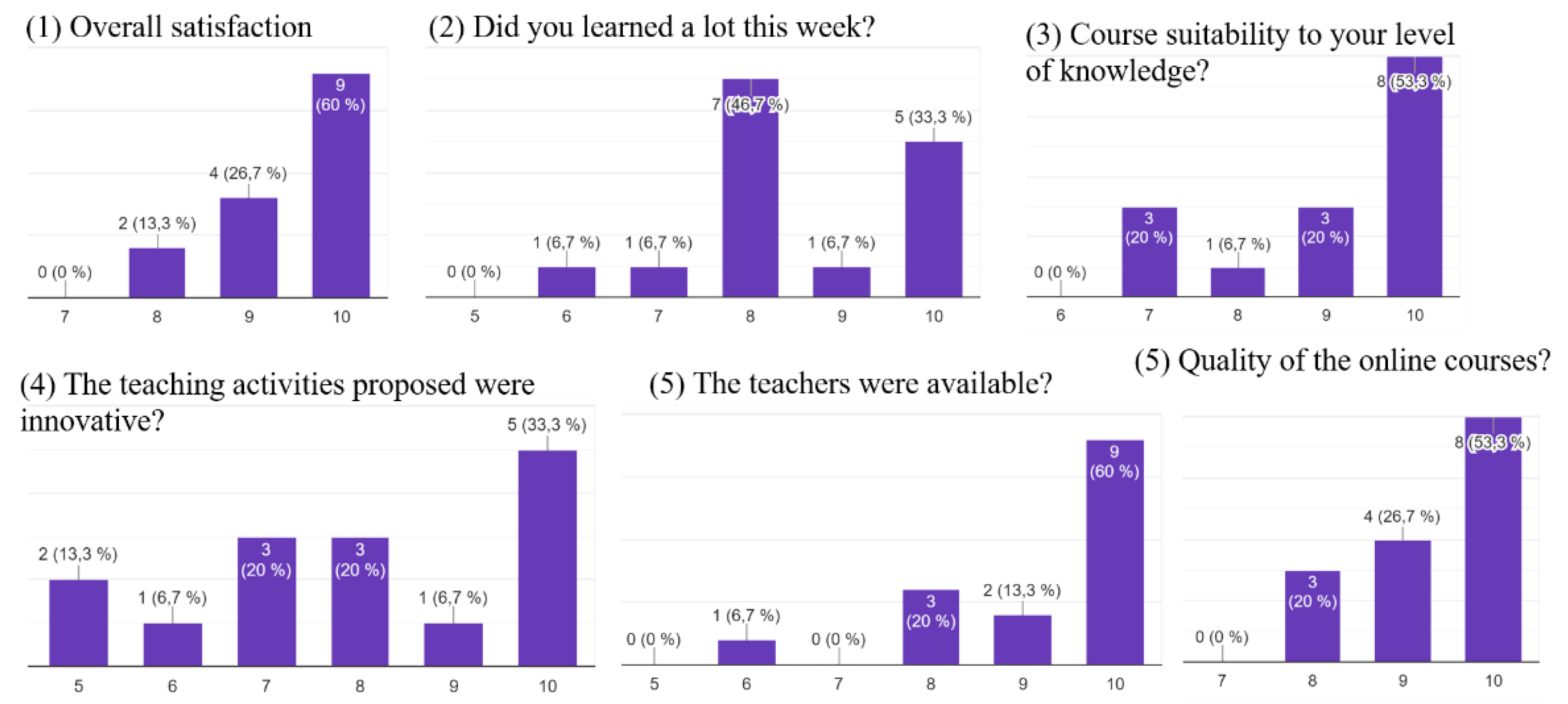
The research carried out is based on a qualitative and exploratory-descriptive evaluation through a survey covering the following topics: (1) the overall satisfaction, (2) the global learning increase, (3) the suitability to the level of knowledge, (4) innovation aspects, (5) the availabilities of professors, (6) the online course quality, (7) what are the highlights of the week. Figures (Figure 8) shows that participants rated the overall experience a solid 9 out of 10, highlighting the immense value and enriching environment it provided. As for knowledge achievements during the week, we are delighted to see a score of 8.5 out of 10, indicating the wealth of learning and development opportunities offered. The teaching activities proposed were rated as 7.5 out of 10. We appreciate this feedback and see it as an opportunity to continue pushing our innovative boundaries, particularly in our methodology. Nevertheless, participants agreed that the richness of these learning activities would be difficult to be replicated remotely as they value in-person exchanges and collaborations. To both questions “would you like to advise another student to sign up for a future DECEL week?” and “would you like to sign up for a future DECEL week?”, the students gave a 100% positive response.
Figure 7.
Student feedback survey results.
In addition to numerical feedback, we present a collection of written students’ feedbacks extracted from the survey:
- “(I) The AI lecture was great as well as the demonstration on the embedded system. (II) The experience of working with an international team and successfully delivering a working project was also great and fulfilling. (III) The opportunity to meet young engineers from different European countries was amazing (exchanging knowledge, interests, points of view and career paths...) (IV) Al the fun that the group had together over the whole week.”
- “To develop a project with people of different countries and point of views which permits to obtain the best of each one. Also, the people I meet on the training being that part the best one of this week.”
- “From my point of view, the most enriching part of the experience was the collaborative teamwork with people from other countries.”
- “All days was really really extraordinary.” […]
In general, the overall evaluation of the DECEL training week was very good and the event was qualified as "a remarkable event". Keywords extracted from all written feedback were compiled and highlighted in terms of word frequency throughout the text (Figure 9). Curiously, a lot of words related to collaboration, interaction and teamwork were found. Thus, we could qualify our collaborative enhanced learning methodology as a success. Nevertheless, several suggestions were made by the audience and several improvements could be made for the future. The students noticed that the tutorials are really sequential and the project could be less guided. They mentioned to have shorter seminars and more robust experimental setups (several setups had to be repaired during the week, generating additional learning about the system through repair). In addition, the students insist that these pedagogical activities could be difficult to follow remotely due to the difficulties to maintain a strong interaction with the others and to understand concretely some working principles details of this dedicated FPGA-based ultrasound imaging system.
3.3. Comparative Results
The results obtained in the framework of the DECEL project before and during this special experimental week were compared with the results obtained in the literature. Comparative results have been binary classified with the following elements: (1) international collaborative approach, (2) project interaction, (3) research and education, (3) electronic design, (4) cooperation project and results are compiled in the Table 1.
For the first time, we have successfully experienced a collaborative, project-based experiment with a strong international collaborative approach. Although the experiment has been relatively limited in duration, it has mobilized educational resources during one year. This initiative shows that it is possible to motivate students to learn, work and collaborate in an international context on an unknown topic. To induce curiosity combined with a strong practical aspect is necessary to keep the students focused in the long term.
4. Conclusions
The DECEL project (Digital Electronics Collaborative Enhanced Learning), aims, to explore new teaching methodologies and blended internationalization formulas. The first experimentation of the project allowed the opportunity to include collaborate on-line international learning (COIL) in dedicated courses. During one week, with 20 students coming from 4 countries we have promoted the student-student interaction from an international perspective, into concrete project, team works and seminars. We have achieved for the first time a collaborative, project-based experiment with a strong international collaborative approach that is truly original when compared to the literature. We developed specific contents (tutorials, documentation, repositories, etc.) and online courses on a common learning management systems (LMS) to spread the information and resources. In this work, we have shared open educational resources (OERs) with advanced instruction and documentation available online or in the appendices section. Using all the resources developed the participants could participate to a specific challenge. The reached goal of the project was to obtain a B-scan-like image using our dedicated FPGA-based under water ultrasound system described and documented in this work. Students successfully adapt the HDL synthesis and the low level program on a Red Pitaya board and record better and better images. The students succeed to understand the digital concepts implemented, from hardware description language (HDL) to high-level languages such as Python or Matlab. In facts, this documented challenge reinforced the technical skills of the participants while stimulating their curiosity. This international training week allowed students to work in collaboration with colleagues from other European universities, combining experience and knowledge in different engineering disciplines, as well as learning about new electronic devices for signal acquisition and processing. Crossing several disciplines, we experienced that the cooperation with other European colleagues had improved our technical and transversal skills. This experience strongly appreciated by the participants might also become an experimental remote lab experience in a near future, still embedded in the framework of the DECEL project. Finally, this work aims to disseminating positive transnational educational experiences, and to fostering a love of digital electronics, low-level programming and experimentation. With this work, we tried to initiate an illustrating contribution for Digital Electronics Systems learning modernization, trying to attract profiles.
Funding
This project has received funding from the European Union's Erasmus + Programme for Education under KA2 grant.
Acknowledgments
The project DECEL (2021 - KA220-HED-13653E18) is co-funded by the EU Erasmus+ Programme. The European Commission's support for the production of this publication does not constitute an endorsement of the contents, which reflect the views only of the authors, and the Commission cannot be held responsible for any use which may be made of the information contained therein.
References
- R. Bjuland, « Adult students’ reasoning in geometry: Teaching mathematics through collaborative problem solving in teacher education », Math. Enthus., vol. 4, no 1, p. 1-30, 2007.
- S. I. Malik, R. Mathew, A. Al-Sideiri, J. Jabbar, R. Al-Nuaimi, et R. M. Tawafak, « Enhancing problem-solving skills of novice programmers in an introductory programming course », Comput. Appl. Eng. Educ., vol. 30, no 1, p. 174-194, 2022. [CrossRef]
- C. Graesser, S. M. Fiore, S. Greiff, J. Andrews-Todd, P. W. Foltz, et F. W. Hesse, « Advancing the science of collaborative problem solving », Psychol. Sci. Public Interest, vol. 19, no 2, p. 59-92, 2018.
- G. Briscoe et C. Mulligan, « Digital Innovation: The Hackathon Phenomenon », 2014.
- P. Plaza, E. Sancristobal, G. Fernandez, M. Castro, et C. Pérez, « Collaborative robotic educational tool based on programmable logic and Arduino », in 2016 Technologies Applied to Electronics Teaching (TAEE), juin 2016, p. 1-8. [CrossRef]
- G. J. Roumen et Y. Fernaeus, « Envisioning Arduino Action: A collaborative tool for physical computing in educational settings », Int. J. Child-Comput. Interact., vol. 29, p. 100277, sept. 2021. [CrossRef]
- L. E. Carlson, J. F. Sullivan, et B. Franklin, « Hands-on Engineering: Learning by Doing in the Integrated Teaching and Learning Program », 1999.
- C. Aldrich, Learning by Doing: A Comprehensive Guide to Simulations, Computer Games, and Pedagogy in e-Learning and Other Educational Experiences. John Wiley & Sons, 2005.
- « Real, virtual, or simulated: Approaches to emergency remote learning in engineering », 2022. [CrossRef]
- C. Dziuban, C. R. Graham, P. D. Moskal, A. Norberg, et N. Sicilia, « Blended learning: the new normal and emerging technologies », Int. J. Educ. Technol. High. Educ., vol. 15, no 1, p. 3, févr. 2018. [CrossRef]
- M. J. Kintu, C. Zhu, et E. Kagambe, « Blended learning effectiveness: the relationship between student characteristics, design features and outcomes », Int. J. Educ. Technol. High. Educ., vol. 14, no 1, p. 7, févr. 2017. [CrossRef]
- Â. Jesus, M. J. Gomes, et A. Cruz, « Blended versus face-to-face: comparing student performance in a therapeutics class », IET Softw., vol. 11, no 3, p. 135-140, 2017. [CrossRef]
- P. Appiah-Kubi et E. Annan, « A Review of a Collaborative Online International Learning », Int. J. Eng. Pedagogy, vol. 10, no 1, janv. 2020, [En ligne]. Disponible sur: https://ecommons.udayton.edu/enm_fac_pub/2.
- M. C. Rodriguez-Sanchez, P. Chakraborty, et N. Malpica, « International collaborative projects on digital electronic systems using open source tools », Comput. Appl. Eng. Educ., vol. 28, no 4, p. 792-802, 2020. [CrossRef]
- C. S. Blyth, « Open Educational Resources (OER) », in The Encyclopedia of Applied Linguistics, John Wiley & Sons, Ltd, 2013, p. 1-5. [CrossRef]
- Z. Nedic, J. Machotka, et A. Nafalski, « Remote laboratories versus virtual and real laboratories », in 33rd Annual Frontiers in Education, 2003. FIE 2003., nov. 2003, p. T3E-T3E. [CrossRef]
- B. Balamuralithara et P. C. Woods, « Virtual laboratories in engineering education: The simulation lab and remote lab », Comput. Appl. Eng. Educ., vol. 17, no 1, p. 108-118, 2009. [CrossRef]
- N. W. Gleason, Éd., Higher Education in the Era of the Fourth Industrial Revolution. Singapore: Springer Singapore, 2018. [CrossRef]
- K. M. Moser, T. Wei, et D. Brenner, « Remote teaching during COVID-19: Implications from a national survey of language educators », System, vol. 97, p. 102431, avr. 2021. [CrossRef]
- D. Curtis et M. Lawson, « Exploring collaborative online learning », J Asynchron Learn Netw, vol. 5, févr. 2001. [CrossRef]
- G.-D. Kim et al., « A single FPGA-based portable ultrasound imaging system for point-of-care applications », IEEE Trans. Ultrason. Ferroelectr. Freq. Control, vol. 59, no 7, p. 1386-1394, juill. 2012. [CrossRef]
- M. Shahdad, R. Lipsett, E. Marschner, K. Sheehan, et H. Cohen, « VHSIC Hardware Description Language », Computer, vol. 18, no 2, p. 94-103, févr. 1985. [CrossRef]
- D. Thomas et P. Moorby, The Verilog® Hardware Description Language. Springer Science & Business Media, 2008.
- Zúñiga-López et C. Avilés-Cruz, « Digital signal processing course on Jupyter–Python Notebook for electronics undergraduates », Comput. Appl. Eng. Educ., vol. 28, no 5, p. 1045-1057, 2020. [CrossRef]
- M. L. Gogan, R. Sirbu, et A. Draghici, « Aspects Concerning the Use of the Moodle Platform – Case Study », Procedia Technol., vol. 19, p. 1142-1148, janv. 2015. [CrossRef]
- C. J. García-Orellana, M. Macías-Macías, H. González-Velasco, A. García-Manso, et R. Gallardo-Caballero, « Remote laboratory experiments of Analog Electronics based on ‘RedPitaya’ », in 2016 Technologies Applied to Electronics Teaching (TAEE), juin 2016, p. 1-7. [CrossRef]
- L. L. Wald, P. C. McDaniel, T. Witzel, J. P. Stockmann, et C. Z. Cooley, « Low-cost and portable MRI », J. Magn. Reson. Imaging, vol. 52, no 3, p. 686-696, 2020. [CrossRef]
- F. M. Stürner et al., « Integrated and Portable Magnetometer Based on Nitrogen-Vacancy Ensembles in Diamond », Adv. Quantum Technol., vol. 4, no 4, p. 2000111, 2021. [CrossRef]
| 1 | A field-programmable gate array (FPGA) |
Figure 1.
Image of the two online courses on Moodle, a) preparatory remote course, b) online course supporting face-to-face activities during the DECEL week. Source : https://celene.univ-tours.fr/course/index.php?categoryid=3552.
Figure 1.
Image of the two online courses on Moodle, a) preparatory remote course, b) online course supporting face-to-face activities during the DECEL week. Source : https://celene.univ-tours.fr/course/index.php?categoryid=3552.
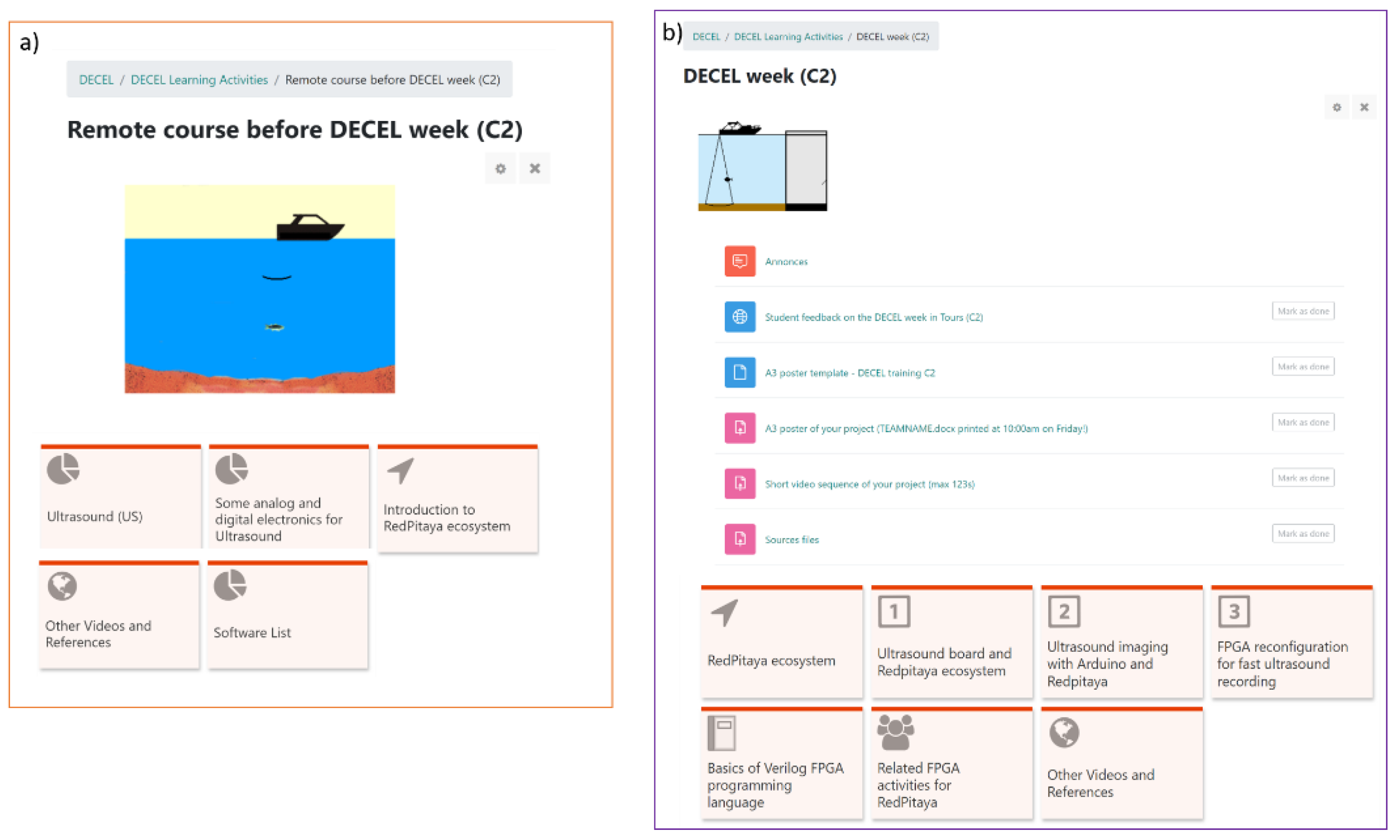
Figure 2.
face-to-face week program at university of Tours.
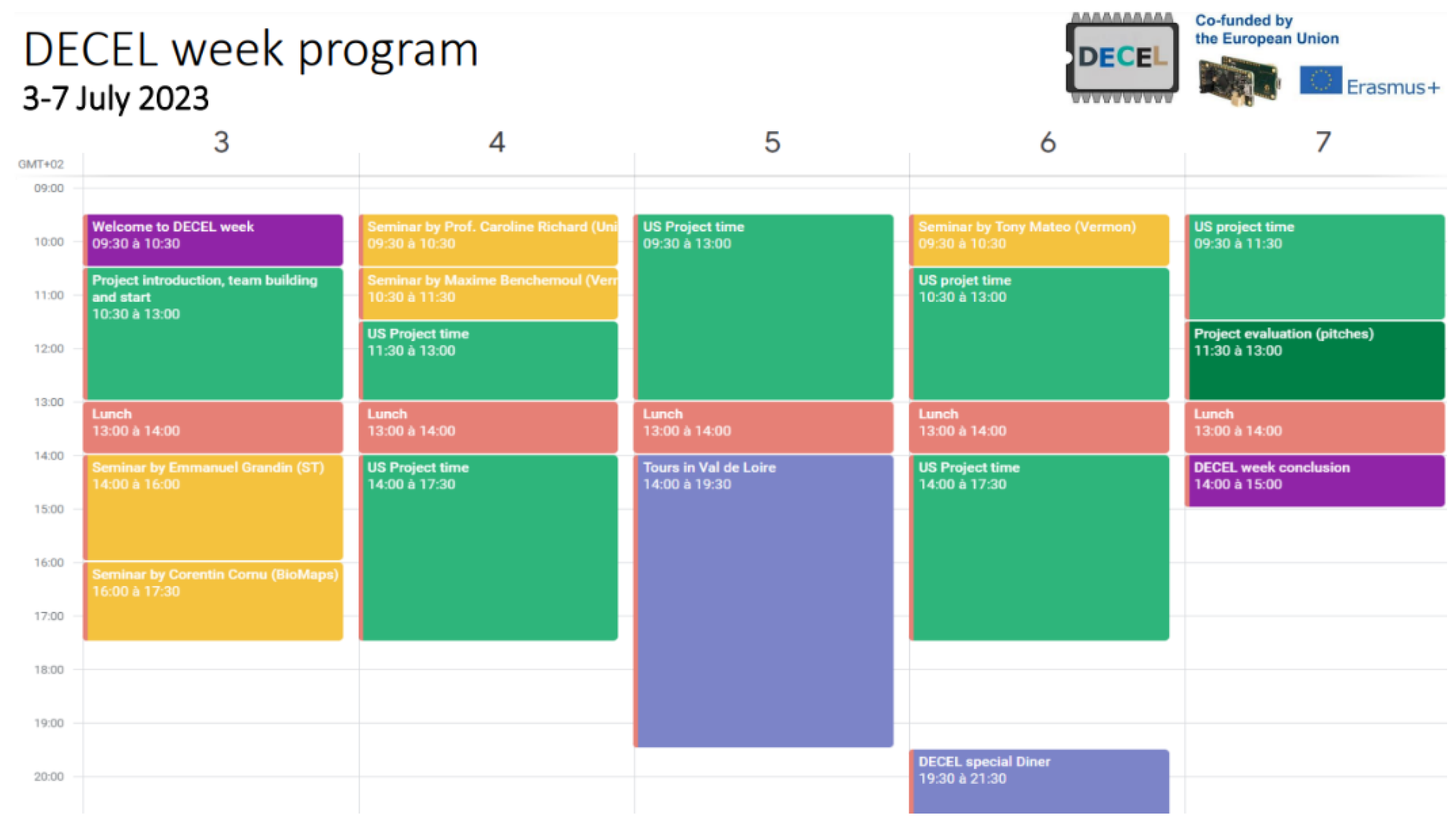
Figure 3.
Overview of the architecture of the DIY ultrasonic imaging system (Redpitaya-based). Note: illustration partly produced by students during the project.
Figure 3.
Overview of the architecture of the DIY ultrasonic imaging system (Redpitaya-based). Note: illustration partly produced by students during the project.
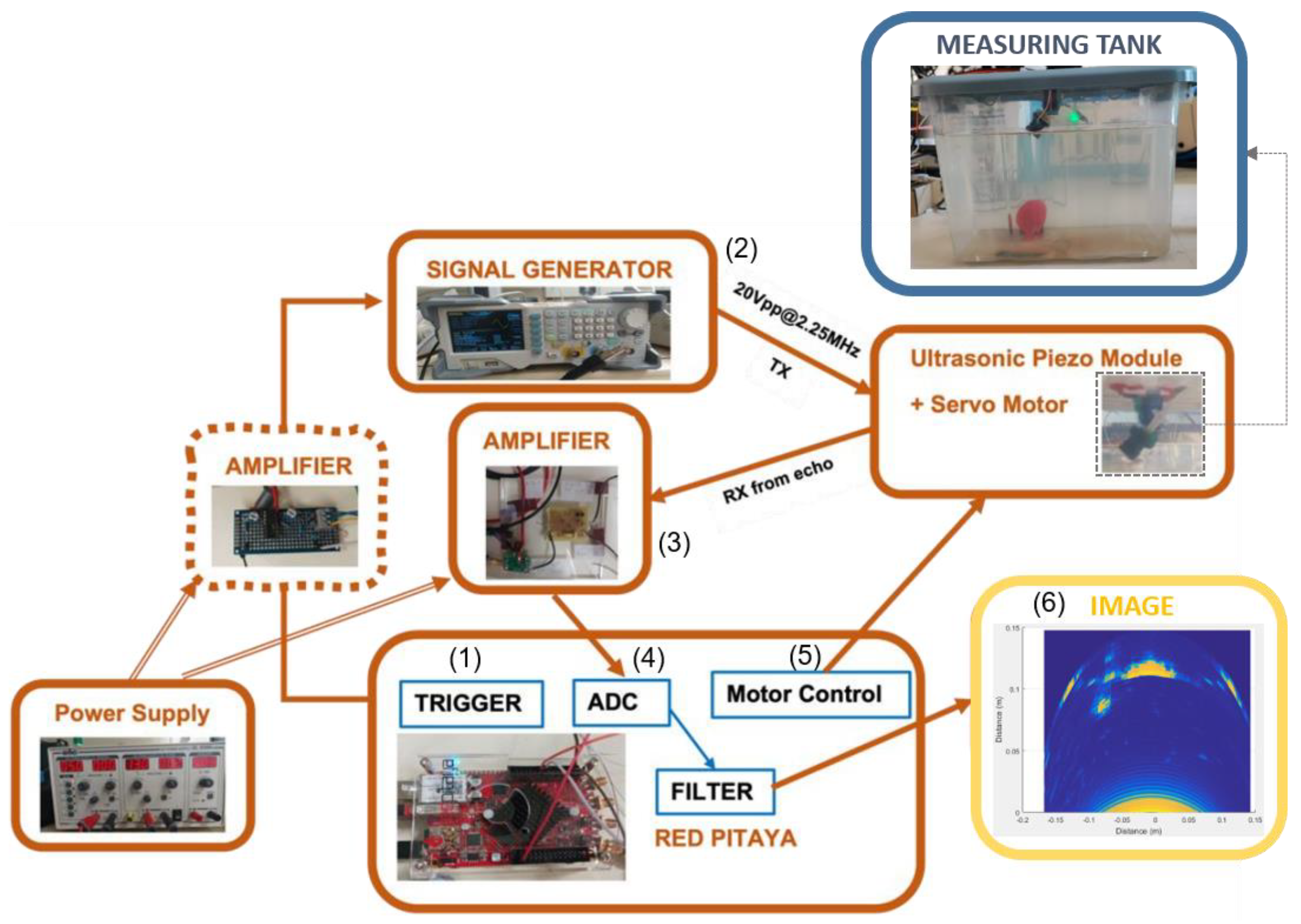
Figure 4.
Physical signal connections to the Red Pitaya FPGA.
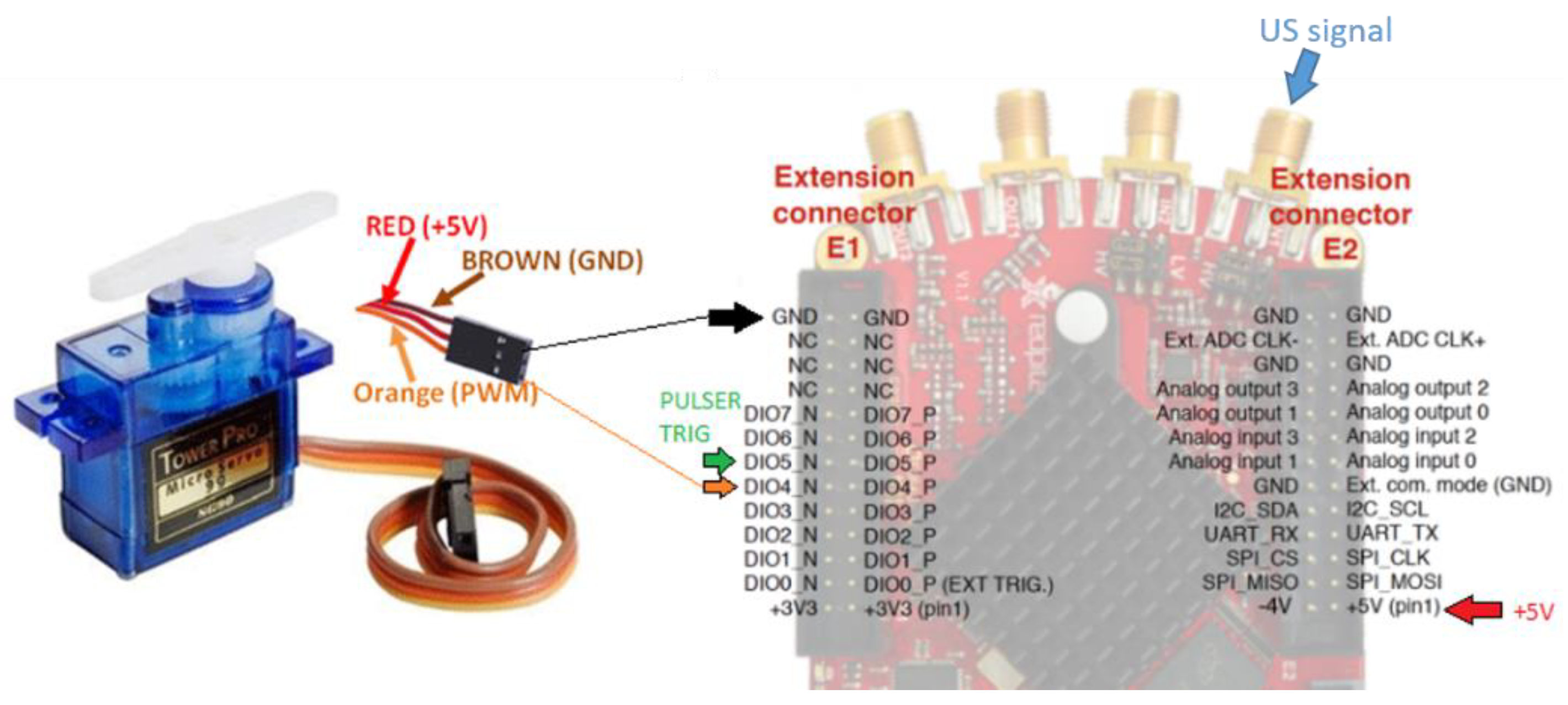
Figure 5.
Example of double ultrasound scan obtained with the default acquisition process implemented with the water tank filled without additional object into it.
Figure 5.
Example of double ultrasound scan obtained with the default acquisition process implemented with the water tank filled without additional object into it.
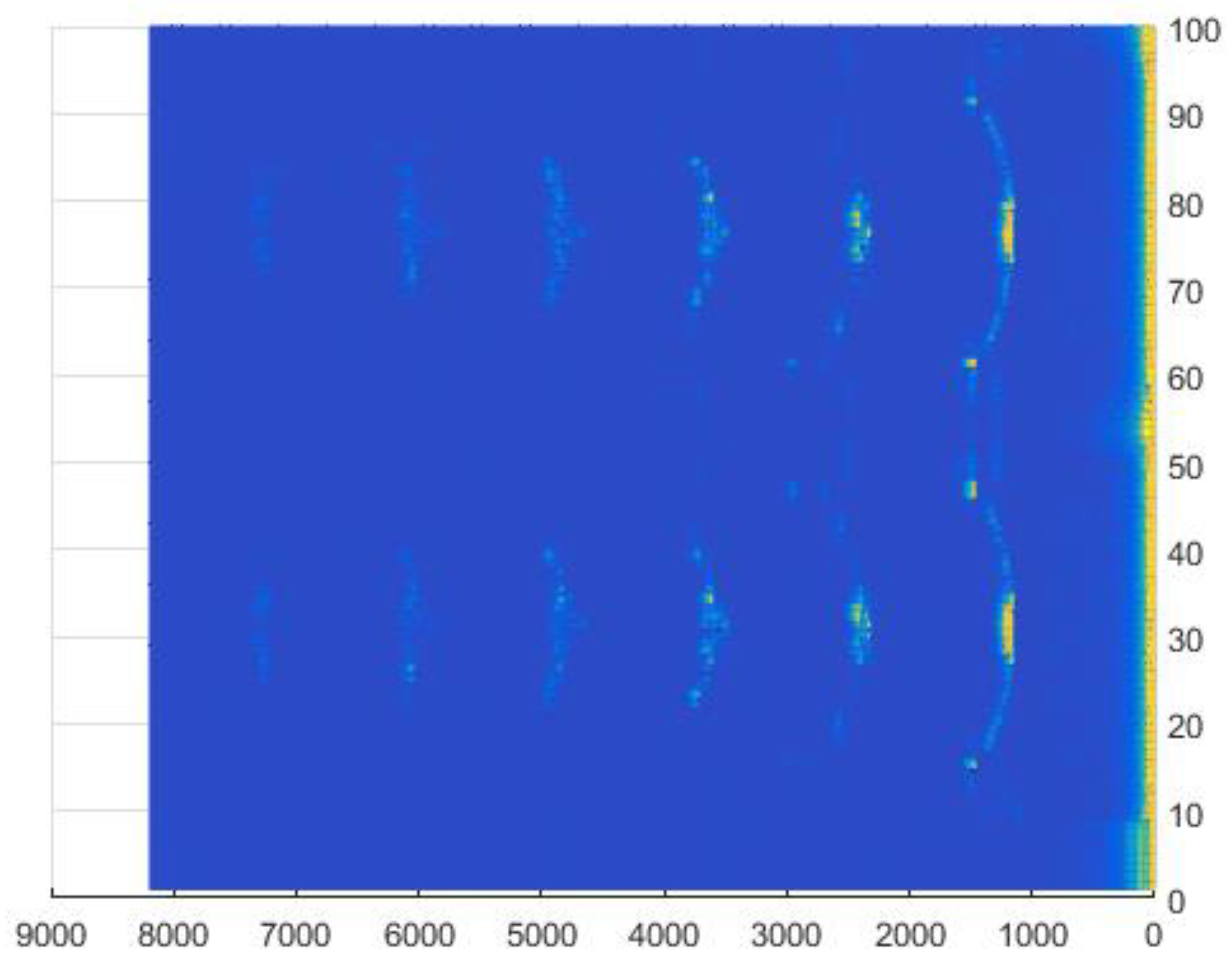
Figure 6.
One of the best ultrasound image reconstructed and normalized by students.
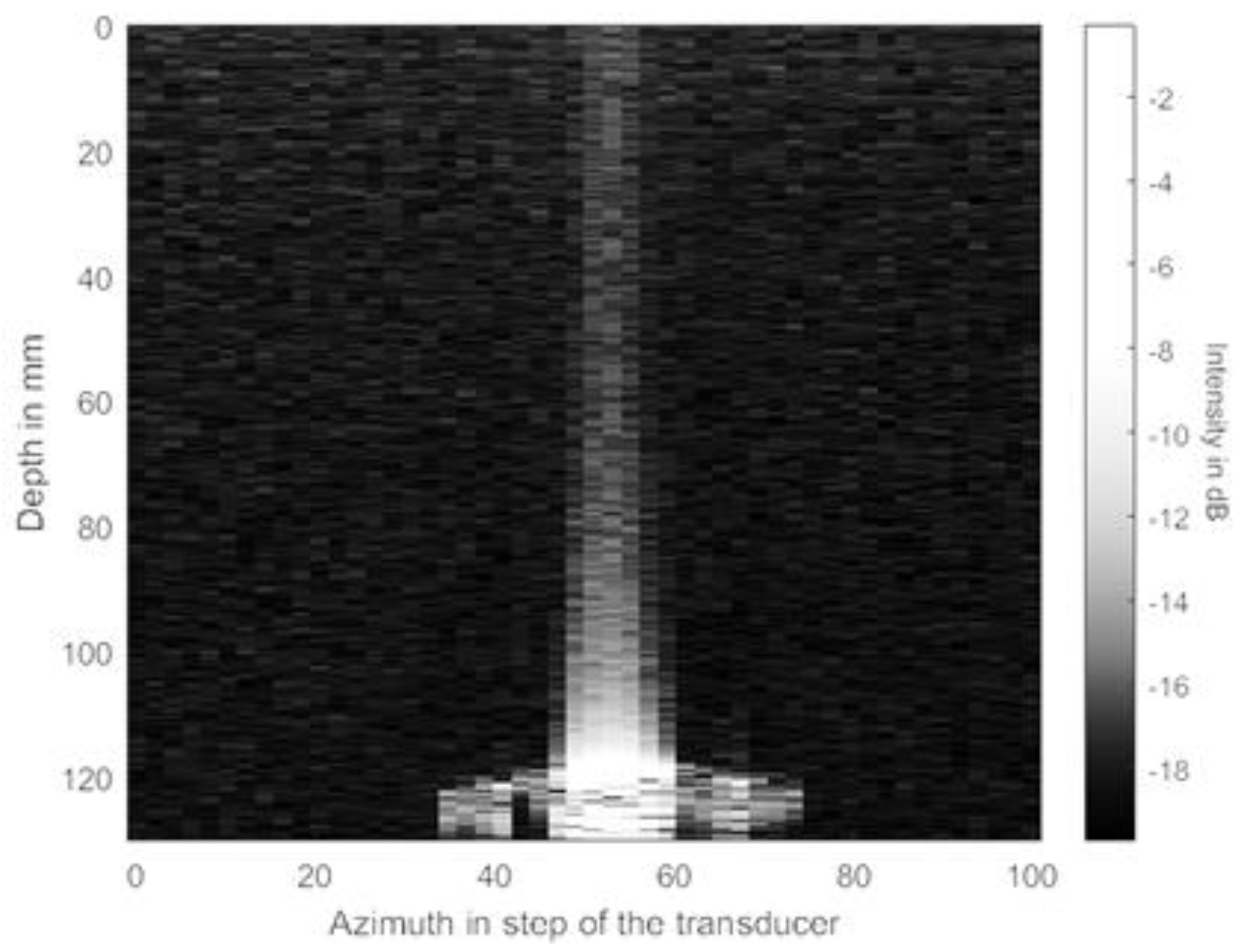
Figure 8.
Representation of frequently found words as a function of size in all participants' written feedback.
Figure 8.
Representation of frequently found words as a function of size in all participants' written feedback.


Table 1.
Comparative table of this work areas with literature.
| Research works | International collaborative approach | Project interaction | Research and education | Electronic design | Cooperation project |
|---|---|---|---|---|---|
| [1,2,3] | - | - | yes | - | yes |
| [4] | yes | yes | yes | - | - |
| [5] | - | - | yes | yes | yes |
| [6,7,8,9] | - | - | yes | - | yes |
| [10,11,12] | - | yes | yes | - | - |
| [13,14,15,20] | - | yes | yes | - | yes |
| [16,17,19,26] | - | yes | yes | yes | - |
| This work | yes | yes | yes | yes | yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



