Submitted:
16 July 2024
Posted:
16 July 2024
You are already at the latest version
Abstract
This study explores fault-tolerant consensus in leader-following heterogeneous multi-agent systems, focusing on actuator failures in uncrewed aerial vehicles (UAVs) and uncrewed ground vehicles (UGVs). An optimization-based fault-tolerant consensus algorithm is proposed. The algorithm utilizes the Euler-Lagrange formula to ensure system consistency under actuator failures, with the Lyapunov stability theory proving the asymptotic stability of the consistency error. The algorithm is applied to heterogeneous multi-agent systems of UAVs and UGVs to derive optimal fault-tolerant consensus control laws for each vehicle type. Simulation experiments give evidence for the feasibility of the proposed control strategy.
Keywords:
uncrewed aerial vehicle
; uncrewed ground vehicle
; heterogeneous multi-agent system
; actuator failures
; consensus
; Lyapunov stability theory
; optimal method
1. Introduction
Due to rapid advancements in science, technology, and evolving societal needs, researchers have consistently prioritized collaborative control of multi-agent systems. Especially in recent years, rapid development has been seen. It has achieved a large number of application results in the field of engineering, such as UAV formation [1,2], intelligent city traffic [3], smart grid [4,5], etc. Consistency is the core issue of collaborative control, and corresponding control protocols are designed according to different controlled objects and working environments to achieve the convergence and stability of the controlled system states.
Multi-agent systems are primarily categorized into homogeneous and heterogeneous types. The consistency inquiry of homogeneous multi-agent systems has achieved fruitful results [6,7,8,9], During actual operation or use, most systems exhibit heterogeneous characteristics. Heterogeneous multi-agent systems are structurally constrained and mainly unable to achieve complete state consistency. Based on this, Scholars both domestically and internationally are increasingly concentrating on the study of consensus in heterogeneous multi-agent systems [10,11,12,13,14,15,16]. In conjunction with the increasing working time of intelligent agents and the complex and changeable actual environment, individual intelligent agents will inevitably encounter failures, and multi-agent systems cannot solve this problem through their attributes. Therefore, ensuring multi-agent systems achieve consistency during failures has become a subject of great concern. Reference [17] proposed an approach utilizing inner and outer loops to accomplish the control objective of multiple uncrewed aerial vehicles following a leader aircraft in the presence of actuator failures. The outer loop is responsible for designing position state control laws to uphold the formation flight, while the inner loop addresses actuator effects through adaptive control laws for UAV attitudes. Reference [18] implemented a distributed Sliding Mode Observer (SMO) for each trailing UAV, estimating necessary reference values through information exchange among neighboring UAVs. Adaptive neural Fault-Tolerant Control (FTC) units were subsequently devised for the UAV to converge toward the benchmark value produced by the distributed Sliding Mode Observer (SMO) in case of actuator failures. Reference [19] examined the coordination of drones in formation under conditions involving leader and actuator failures. The study applied boundary layer theory and devised a control protocol featuring adaptive mechanisms for compensating actuator deficiencies. Reference [20] devised a formation control law with adaptive mechanisms for multi-octocopter drone models, taking into account uncertainties and actuator failures. Reference [21] proposed a new adaptive backstepping method related to command filters to address model uncertainties and input saturation problems for multiple UAVs under input saturation, actuator failures, and external disturbances, designing a robust controller. The aforementioned studies focus exclusively on homogeneous multi-agent systems, with limited research outcomes on achieving fault-tolerant consistency in heterogeneous multi-agent systems. Reference [22] investigated a collaborative fault-tolerant output regulation control approach for linear heterogeneous multi-agent systems operating under directed network topologies. The objective is to ensure system stability despite actuator failures. Reference [23] examines fault-tolerant consistency in heterogeneous multi-agent systems. The study introduces a sliding mode observer aimed at achieving consistent system control in the presence of uncertainties and actuator faults. While both references explored fault-tolerant control in heterogeneous multi-agent systems, they primarily discussed generic models rather than specific physical implementations.
Building on the preceding analysis, this paper aims to investigate the consistency issues in leader-following heterogeneous UAV-UGV systems featuring faulty followers. Specifically, this paper designs a fault-tolerant consistency controller for leader-following heterogeneous multi-agent systems encountering partial actuator failures. The contributions of this study are outlined below:
Firstly, this paper introduces dynamic models for intelligent agent systems and formulates them using Kronecker products in state space. It then constructs the Laplacian matrix of the communication topology.
The paper proposes a fault-tolerant consistency controller for leader-following multi-agent systems in the presence of actuator failures, validated using Lyapunov stability theory. The algorithm shows robust fault tolerance to constant and time-varying actuator faults without needing to solve the Hamilton-Jacobi-Bellman equation.
Performance index functions are designed for each UAV and UGV, aiming to minimize the performance index of each UAV and UGV pair to achieve overall minimization for the entire heterogeneous multi-agent system. The fault-tolerant consistency controller obtained through this optimization process is considered the optimal controller, ensuring leader-following consistency under conditions of actuator failures in both UAVs and UGVs.
2. Preliminaries
This section primarily covers fundamental concepts related to UAVs and UGVs, discussing the application of graph theory to delineate system interrelationships and presenting the state-space equations for UAV and UGV systems.
2.1. Graph Theory
Based on the relevant theories of graph theory, describe the communication topology of multi-agent systems. The unoriented weighted graph comprises vertices, representing the complete set of vertices. Each vertex corresponds to an agent, which denotes the leader. Let denote the edges between vertices, representing the edge from vertex to vertex . The connection between two vertices through an edge indicates the existence of information exchange between them. If bidirectional communication is allowed, the graph is undirected; or directed. stands for the adjacency matrix describing relationships between followers, where the is the edge ’s weight. If there is an edge between vertices and , then ; otherwise, . denotes the neighbor set of the -th agent, represented as .
In an unoriented graph, the degree of a node denotes its number of neighbors, specifically the count of connecting edges per node. Let denote the degree matrix of the unoriented graph, defined as . The Laplacian matrix of the graph is defined as , where is the adjacency matrix. , It represents the Laplacian matrix, which describes the communication relationships between leaders and followers.
2.2. UGV Dynamics Model
A single UGV model be defined as equation (1):
where denotes the position in space, denotes velocity, which corresponds to the speed of the UGV moving along the direction of and signifies the input of the agent . For UGVs, the formula is transformed into the following states:
where
Considering the failure of actuators in uncrewed vehicles represents the input after the actuator failure. The specific expression is as follows:
where the equation is central to our analysis. This paper primarily examines partial actuator failures within a multi-following uncrewed ground vehicle system, which does not uniformly equal one across all instances. The dynamic model of each of the UGVs in the system can be represented as:
For the UGVs actuator failure model described by equation (4), when the multi-uncrewed ground vehicle system achieves consensus, it means that all uncrewed ground vehicle states satisfy the following equation:
2.3. UAV Dynamics Model
A single UAV model be defined as equation (6):
where represents the UAV’s positions in the axes; corresponds to the rotation angle of the UAV along and axes respectively. denotes the lift force in the axes; represents the control input for rotating the drone around the three coordinate axes.
If there is one leader UAV and follower UAVs, then the equation (6) above can be transformed into a state equation:
where
represents the leader UAV’s state.
Considering the failure of actuators in uncrewed vehicles represents the input after the actuator failure. The specific expression is as follows:
where the equation is central to our analysis. This paper primarily examines partial actuator failures within a multi-following uncrewed aerial vehicle system, which does not uniformly equal one across all instances. The dynamic model of each of the UAVs in the system can be represented as:
For the UAV actuator failure model described by equation (9), when the multi-uncrewed aerial vehicle system achieves consensus, this implies that all states of the UAVs satisfy the following equation:
2.4. Heterogeneous Multi-Agent System
By establishing fault models for UAVs and UGVs using equations (4) and (9), the expression of the state variable for a heterogeneous multi-agent system can be constructed by merging state variables. The state variable model for heterogeneous systems is defined as follows:
where
To better describe the communication relationship between heterogeneous systems, a simple linear transformation needs to be applied to the Laplacian matrix of the system. The system consists of uncrewed ground vehicles and uncrewed aerial vehicles, with a total of agents. is corresponding Laplacian matrix, is shown as follows:
where represents information between heterogeneous agent systems. Regarding the actuator fault model of heterogeneous agents system described by equation (11), When the heterogeneous multi-agent system reaches consensus, it implies that all agent states satisfy the following equation:
Assumption 1.
The communication graph between agent systems is firmly connected, and at least one follower is linked to a leader.
Assumption 2.
During the operation of the leader-follower multi-agent system, the leader agent will not experience failures.
3. Design and Analysis of Fault-Tolerant Consensus Controllers
This section addresses the problem described in equation (12) by designing and analyzing fault-tolerant consensus controllers of heterogeneous multi-agent fault models. The theoretical effectiveness of the proposed algorithm is subsequently demonstrated.
The following describes the performance index parameters for each follower agent:
where , represents a constant greater than zero indicating the integral’s upper bound. represents the transpose operation of a vector. and both positive definite symmetric matrices.
Theorem 1.
Consider a leader-follower multi-agent system:
Assuming that the leader-follower multi-agent system (14) satisfies Assumptions 1 and 2. For the leader-follower multi-agent system with actuator faults described by equation (14), the optimal controller , which minimizes the performance index parameters (13), can be represented:
where denote the number of neighbor agents in the -th agent’s neighbor set. represents the positive definite symmetric matrix's inverse matrix in the performance index parameters. Under this optimal controller , the consensus error of the systems (14) can asymptotically converge to zero.
Proof of Theorem 1.
Define the consensus tracking error of the -th agent is shown as follows:
By utilizing the dynamic equation of the system (14), the time derivative of equation (16) will be obtained:
Furthermore, we assume that the controllers of all agents in of the -th agents are mutually independent.
Define the performance index function for the consensus error system described by equation (16) as:
Define the Hamiltonian parameters:
where is an auxiliary variable. Performing some mathematical transformations on the Hamiltonian function represented by equation (19), we can obtain the following expression:
By computing the partial derivatives of concerning and respectively, we obtain:
Therefore, the optimal fault-tolerant controller is obtained:
Next, the primary analysis focuses on whether the controller represented by equation (22) can achieve consensus for equation (14) under actuator faults. With the principles of optimal control theory, the controller equation (22) satisfies:
where stand for the optimal consensus error and optimal coefficient of the the agent under the optimal fault-tolerant control . For this purpose, the Lyapunov function for the defined equation (14) is as follows:
where are both symmetric positive definite matrices. According to the properties of positive definite matrices, equation (24) illustrates a positive definite function.
Based on reference [24], the optimal Hamiltonian function represented by equation (19) can be rewritten in the following form:
Therefore, equation (23) will be transformed into:
Furthermore, by differentiating the Lyapunov function defined by equation (24), we obtain:
According to equation (26),
Since both matrix and matrix are positive definite symmetric matrices, is a negative definite function. According to the Lyapunov stability theory, will asymptotically converge to zero. □
From the performance index functions, it can be seen that if reaches a minimum value, then the state error between the agents in the -th agent's neighbor set and the -th agent also reaches a minimum value. Furthermore, according to Assumption 1, it can be obtained that if all reach minimum values, the entire multi-agent system's state can achieve consensus. Therefore, from Theorem 1, it can be concluded that the controller can achieve consensus on the state of the system (14).
According to Theorem 1, performance index functions are defined for each UAV and UGV as follows:
where when is used, it represents UGV, and when is used, it represents UAV. are both positive definite symmetric matrices.
Due to the different dimensions of the state vectors of UAVs and UGVs, weight coefficient matrices are designed as follows:
According to Assumption 1, it can be inferred that if all and reach minimum values, the entire leader-following multi-agent system's state can achieve consensus. Therefore, from Theorem 1, it can be concluded that the controller can achieve consensus on the multi-agent system's state. Obtain the optimal fault-tolerant consensus controllers for each UAV and UGV respectively:
For UGV:
UGV control law:
For UAV:
UAV control law:
For any two agents and in the leader-following multi-agent system, there are two cases for an agent : 1) , in which case, according to the above analysis, asymptotically converges to zero, thus indicating that agents ’s states and agents ’s states tend to be consistent; 2) , According to Assumption 1, it is known that there is a path between any two agents, and by the transitivity of states, the states of agents and tend to be consistent. It can be inferred that the consistency error of the system (11) under actuator failure can asymptotically converge to zero at this time.
4. Simulations
In this section, simulations are performed to validate the effectiveness of the proposed algorithm (31)(33). The experiment involves a leader UAV, three follower UAVs, and three UGVs forming the system. MATLAB 2017a is used as the experimental platform.
The Laplacian matrix corresponding to the undirected communication topology is shown below:
Each UAV has a 12-dimensional state, while the state vector of the UGV is 4-dimensional. The correlation coefficient matrix of the system (11) is as previously designed.
The system primarily considers partial failure of actuators. Therefore, all followers' actuator failure coefficients must be set between 0 and 1 in the simulation. This experiment finds the following failure coefficient scenarios.
According to the above coefficient matrix and failure coefficient design, MATLAB simulation is employed to verify the control algorithm (31) and algorithm (33) proposed for the heterogeneous multi-agent system.
To further demonstrate the superior convergence speed of the proposed algorithm, this study compares the algorithm with the heterogeneous multi-agent system consistency algorithm presented in reference [25] under similar initial conditions. The comparison between the simulation results of reference [25] and the algorithm (31) (33) is shown in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11 and Figure 12.
Figure 1 and Figure 2 illustrate that the method proposed in (31)(33) for addressing leader-following consistency outperforms the approach presented in reference [25], demonstrating superior performance. Figure 1 illustrates the stabilization of position consistency error in the X-direction between the UAV and UGV systems when using the optimal fault-tolerant consistency protocol . Figure 2 shows the position stabilization between the UAV and UGV systems in the X-direction. when employing the consistency protocol from reference [25].
Figure 3.
Consistency error in the Y-direction position between the following UAV, UGV, and the leader.
Figure 3.
Consistency error in the Y-direction position between the following UAV, UGV, and the leader.
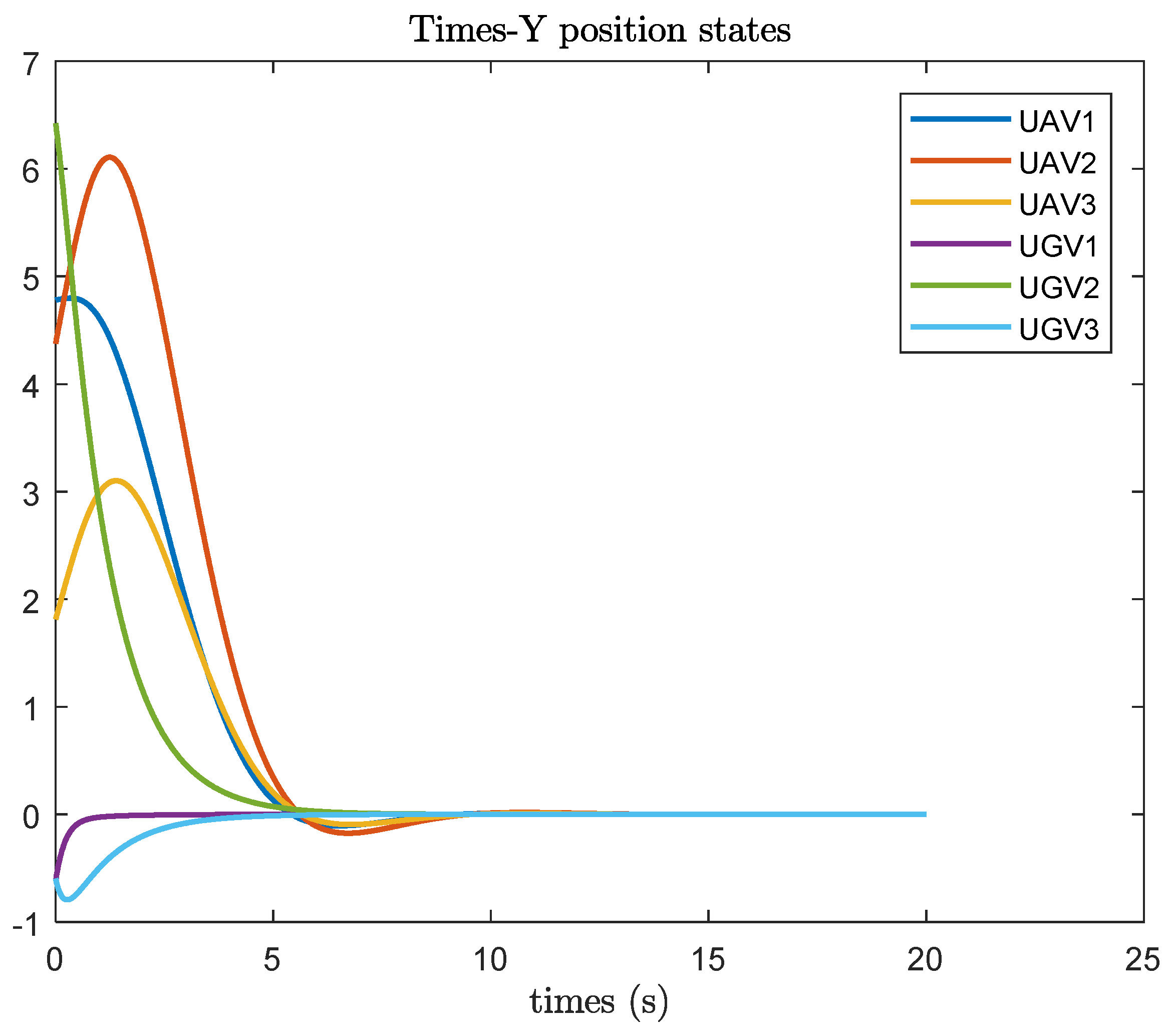
Figure 4.
The position variables of UAV and UGV in the Y-direction are in reference [25]
Figure 4.
The position variables of UAV and UGV in the Y-direction are in reference [25]
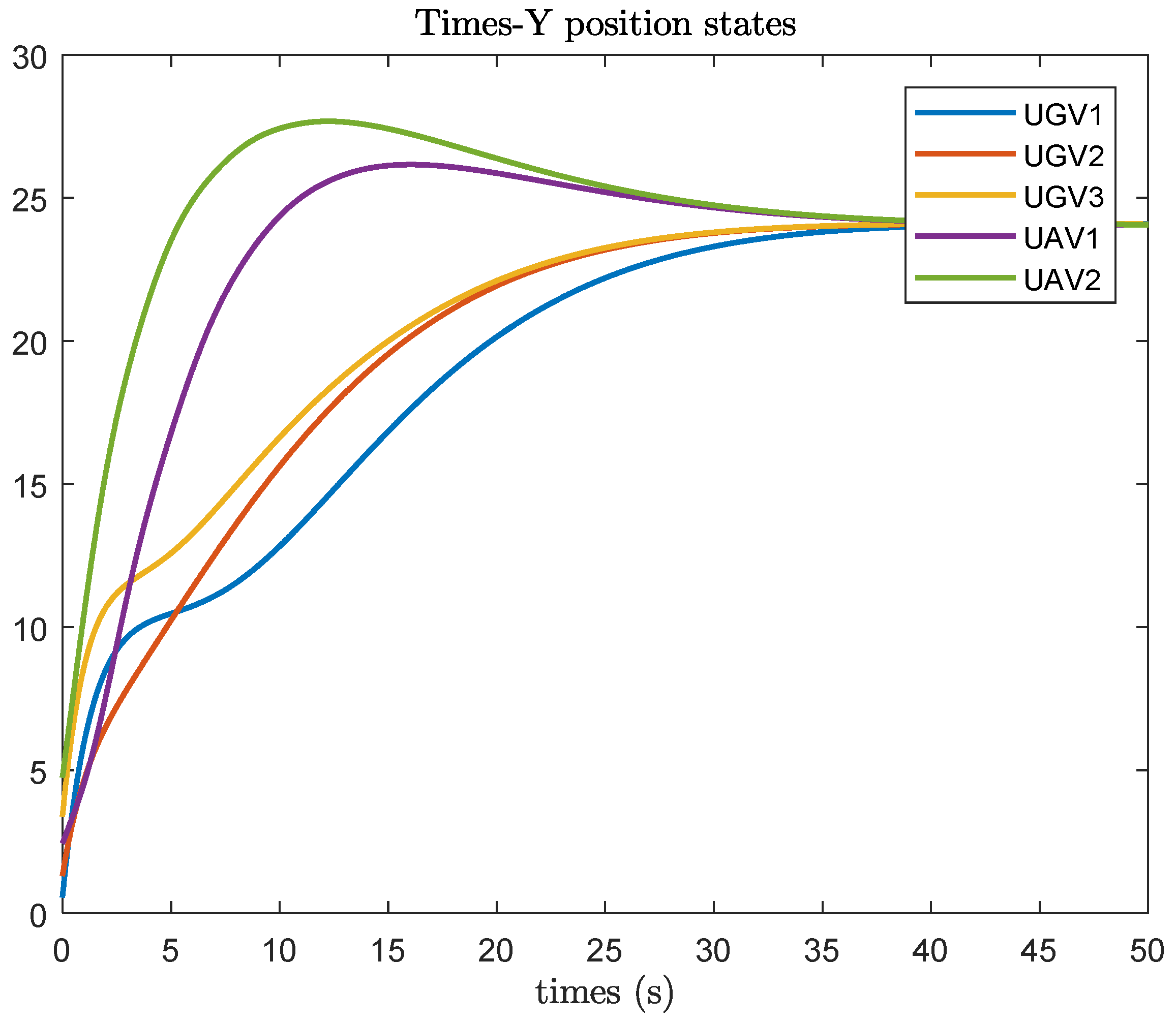
Figure 3 shows that under the optimal fault-tolerant consistency protocol, the UAV and UGV systems stabilize regarding position consistency error in the Y-direction between . Figure 4 demonstrates that using the consistency protocol proposed in reference [25], the UAV and UGV systems stabilize regarding the position in the Y-direction .
Figure 5.
Consistency error in the Z-direction position between the following UAV and the leader.
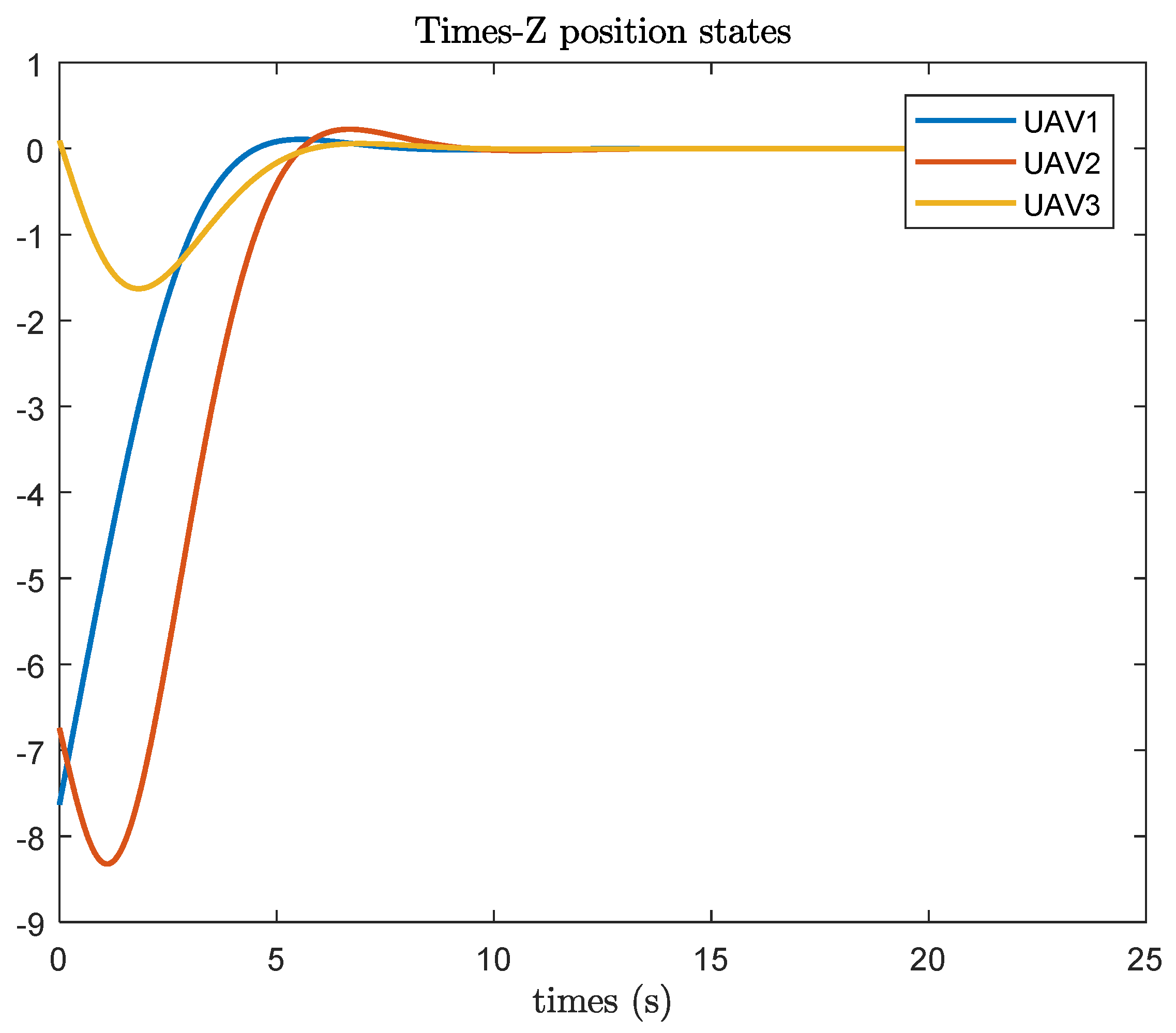
Figure 5 illustrates the stabilization of position consistency error in the Z-direction for the UAV system at t = 10s under the optimal fault-tolerant consistency algorithm. The consistency algorithm presented in reference [25] is designed only for the UAV and UGV systems in the XY plane, thus not considering the position state in the Z-direction.
Figure 6.
Consistency error in velocity along the X-direction between the following UAV, UGV, and the leader.
Figure 6.
Consistency error in velocity along the X-direction between the following UAV, UGV, and the leader.
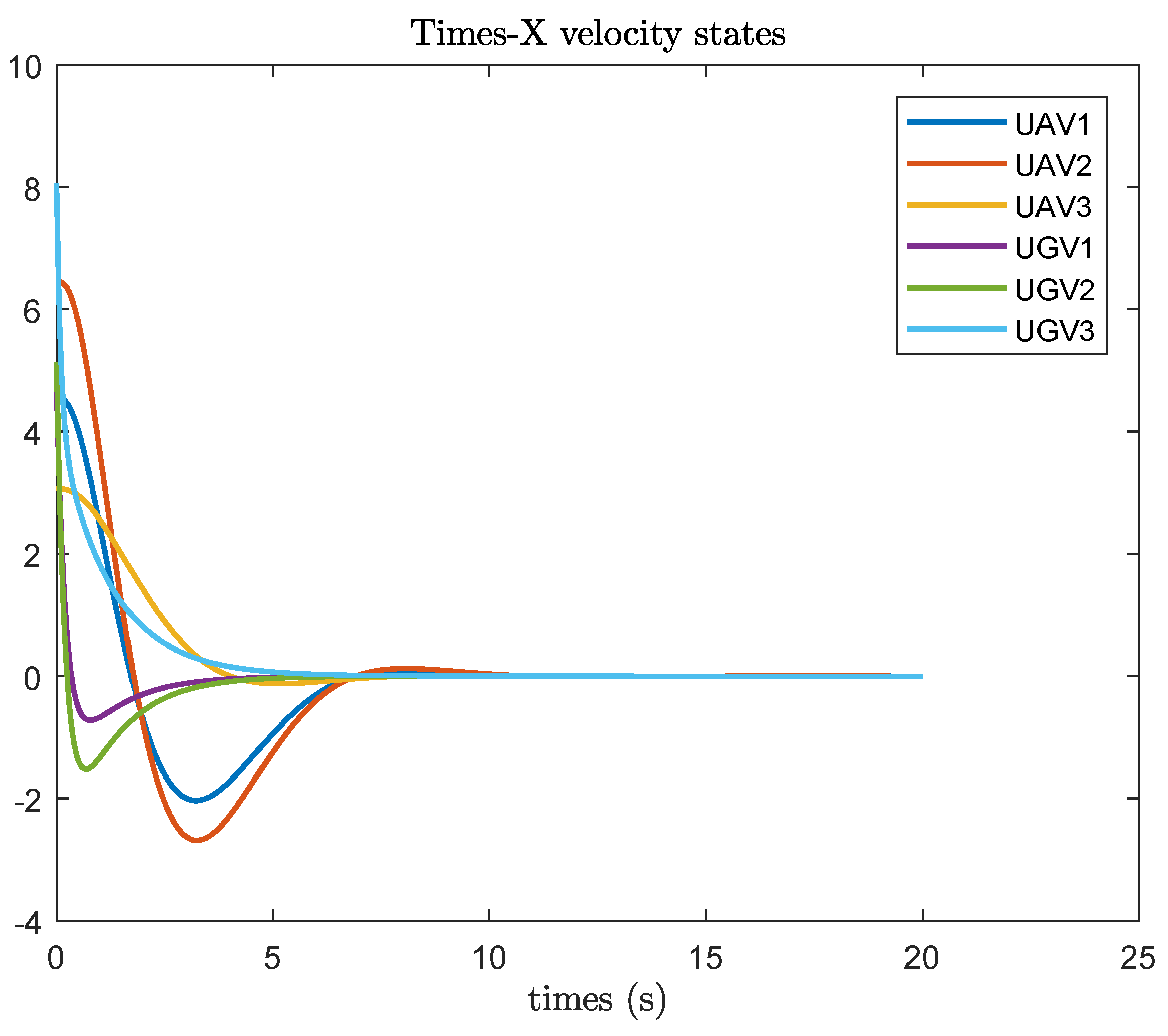
Figure 7.
The velocity variables of UAV and UGV in the X-direction are in reference [25].
Figure 7.
The velocity variables of UAV and UGV in the X-direction are in reference [25].
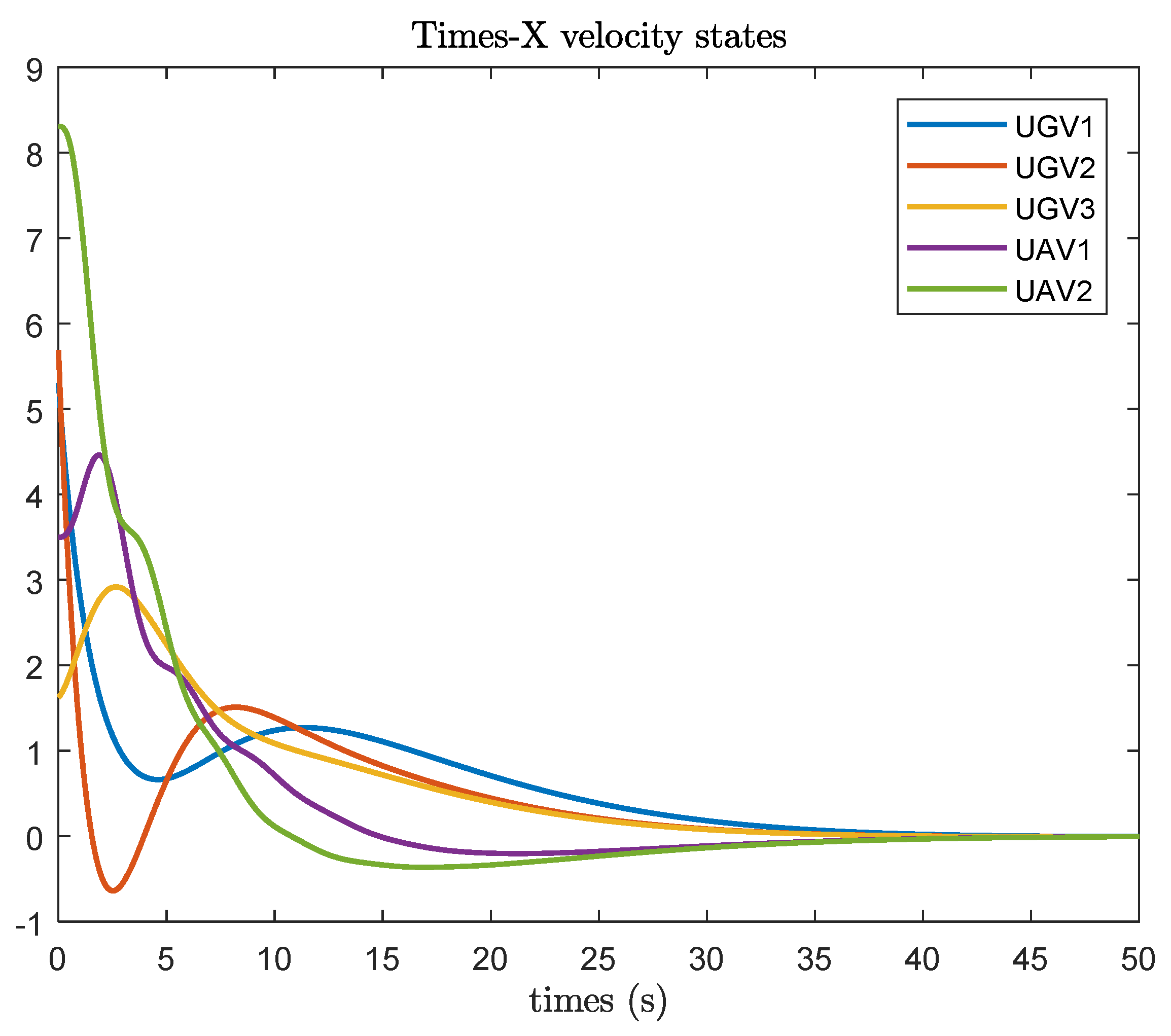
Figure 6 illustrates that the UAV and UGV systems achieve stable velocity consistency errors in the X-direction under the optimal fault-tolerant consistency algorithm. Figure 7 demonstrates that using the consistency control algorithm from reference [25], the UAV and UGV systems achieve stable velocity states in the X-direction between .
Figure 8.
Consistency error in velocity along the Y-direction between the following UAV, UGV, and the leader.
Figure 8.
Consistency error in velocity along the Y-direction between the following UAV, UGV, and the leader.
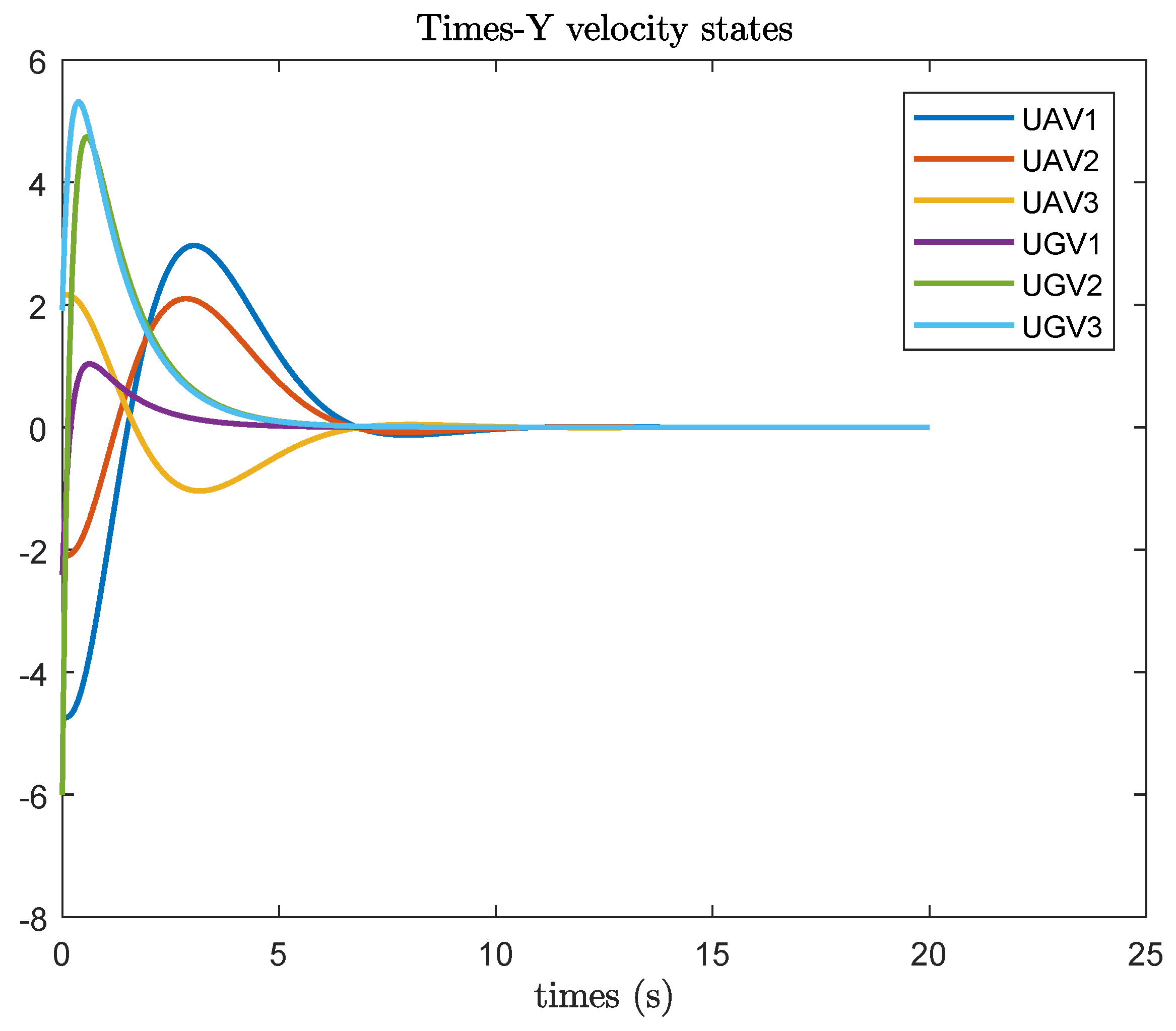
Figure 9.
The velocity variables of UAV and UGV in the Y-direction are in reference [25].
Figure 9.
The velocity variables of UAV and UGV in the Y-direction are in reference [25].
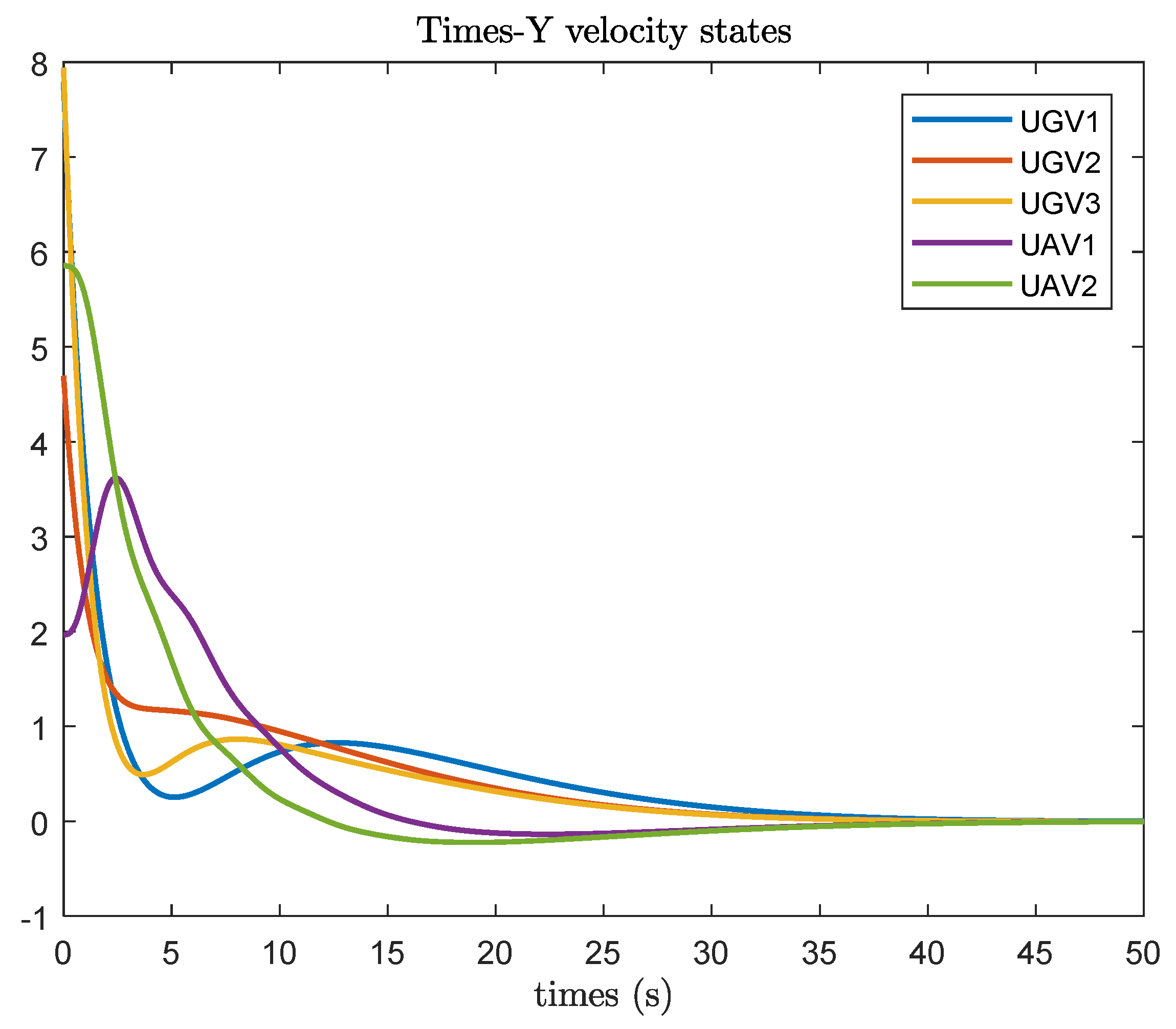
Figure 8 illustrates that the UAV and UGV systems achieve stable velocity consistency errors in the Y-direction under the optimal fault-tolerant consistency algorithm. Figure 9 shows that using the consistency control algorithm from reference [25], the UAV and UGV systems achieve stable velocity states in the Y-direction .
Figure 10.
Consistency error in velocity along the Z-direction between the following UAV and the leader.
Figure 10.
Consistency error in velocity along the Z-direction between the following UAV and the leader.
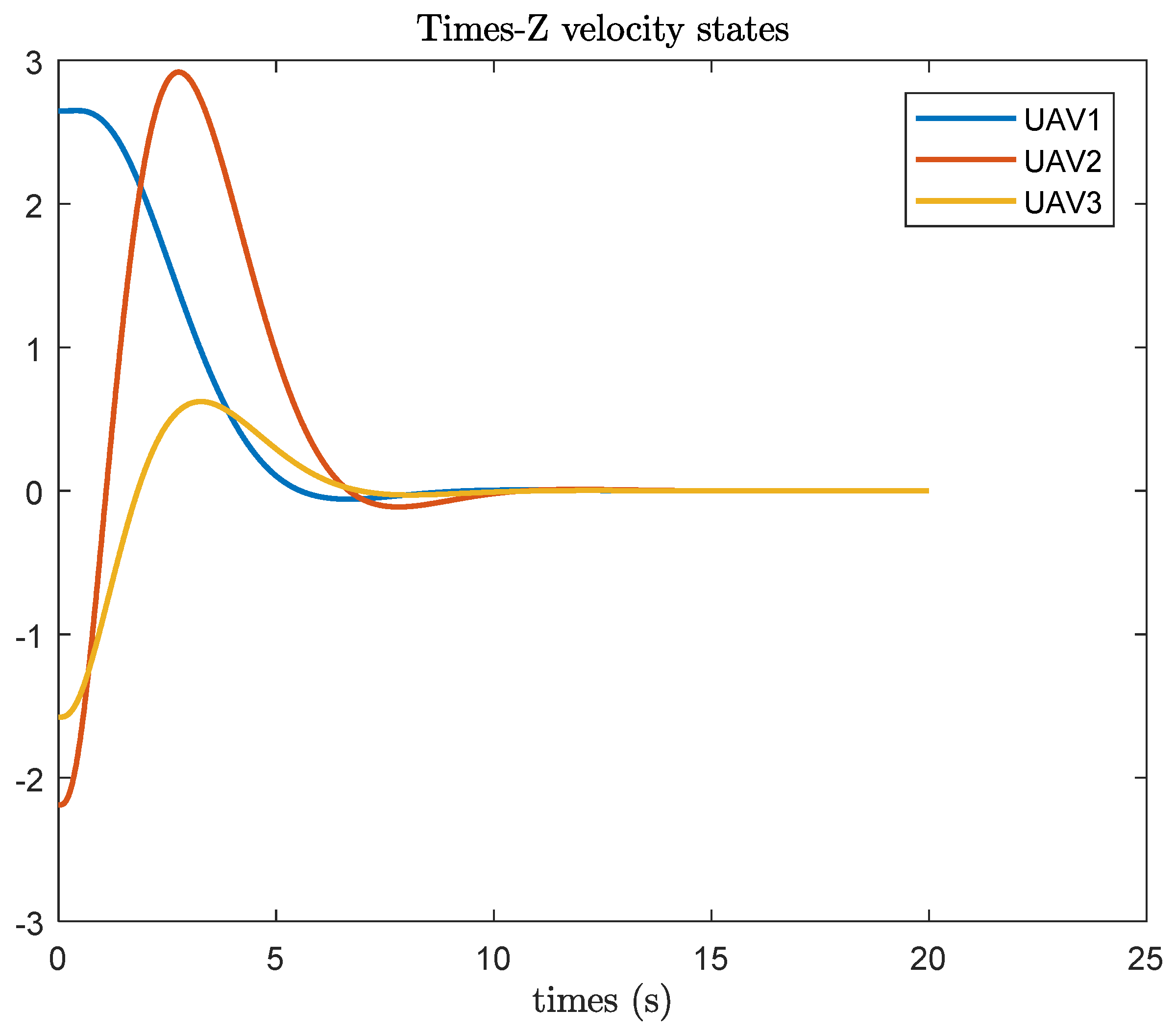
Figure 10 displays the stabilization of position consistency error in the Z-direction for the UAV system under the optimal fault-tolerant consistency algorithm. The consistency algorithm presented in reference [25] is designed only for the UAV and UGV systems in the XY plane, thus not considering the velocity state in the Z-direction.
Figure 11.
Consistency error in the attitude angles of the following UAV.
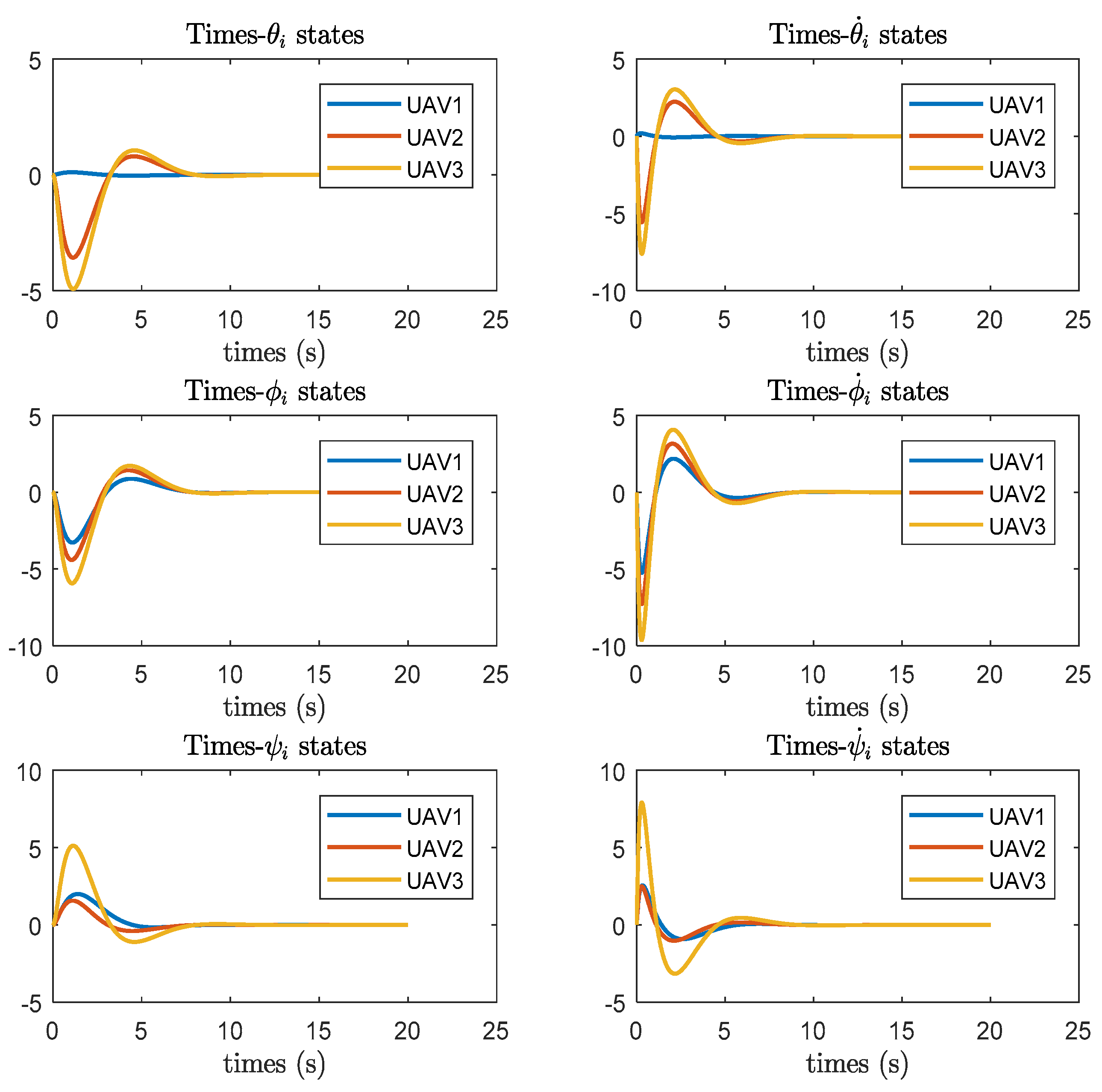
Figure 12.
The state variables of the attitude angles of the UAV under the method proposed in reference [25].
Figure 12.
The state variables of the attitude angles of the UAV under the method proposed in reference [25].
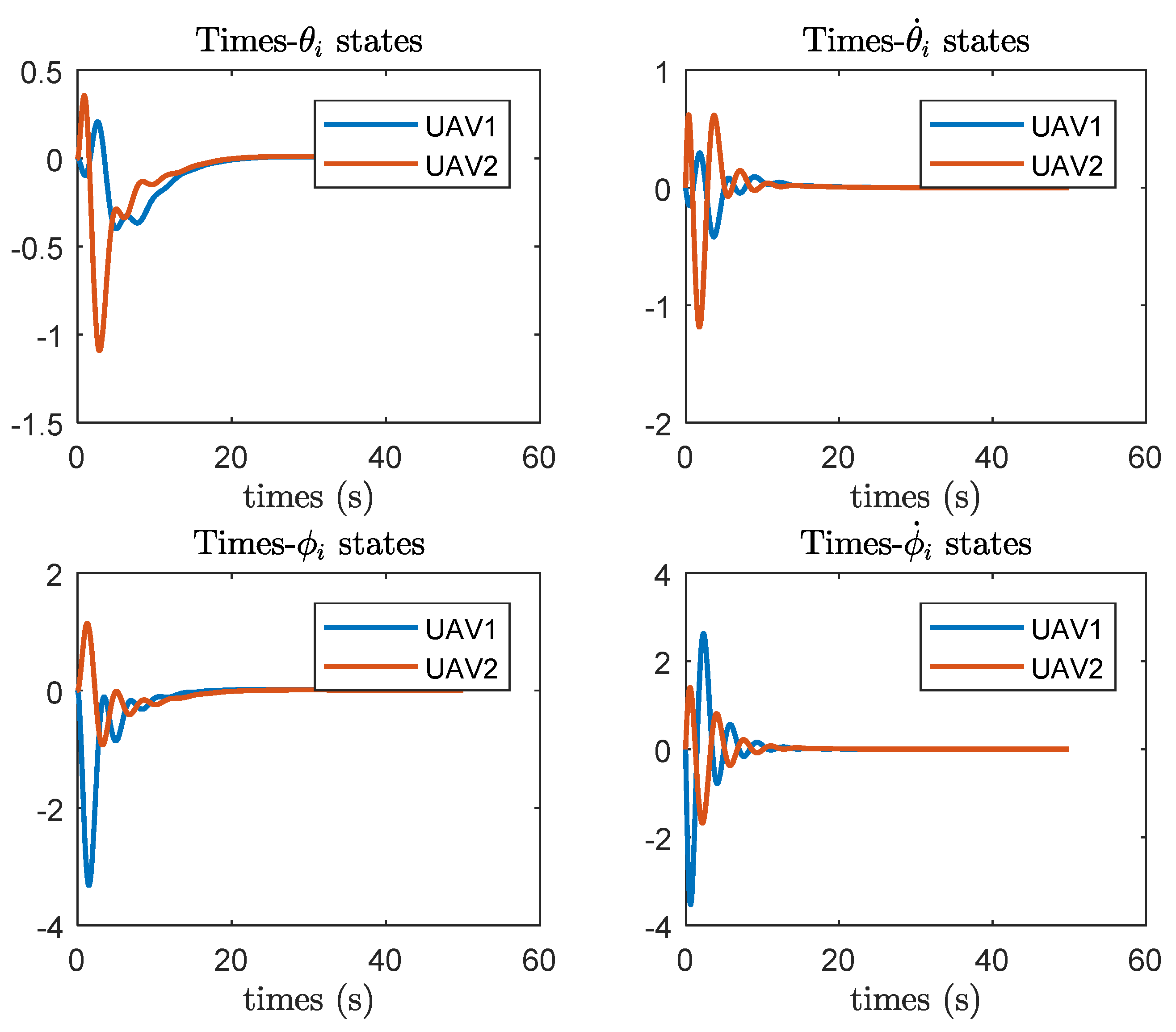
Figure 11 and Figure 12 show that Figure 11 depicts the stabilization of the roll angle, yaw angle, pitch angle, and their corresponding angular velocities of the UAV system under the optimal fault-tolerant consistency protocol . Figure 12 illustrates the stabilization of the roll angle, yaw angle, and their corresponding angular velocities of the UAV under the algorithm proposed in reference [25] . It also demonstrates the optimal fault-tolerant consistency algorithm’s superiority, considering actuator faults. This algorithm enables heterogeneous multi-agent systems to achieve quicker consistency in the presence of faults, reducing the time required to complete tasks.
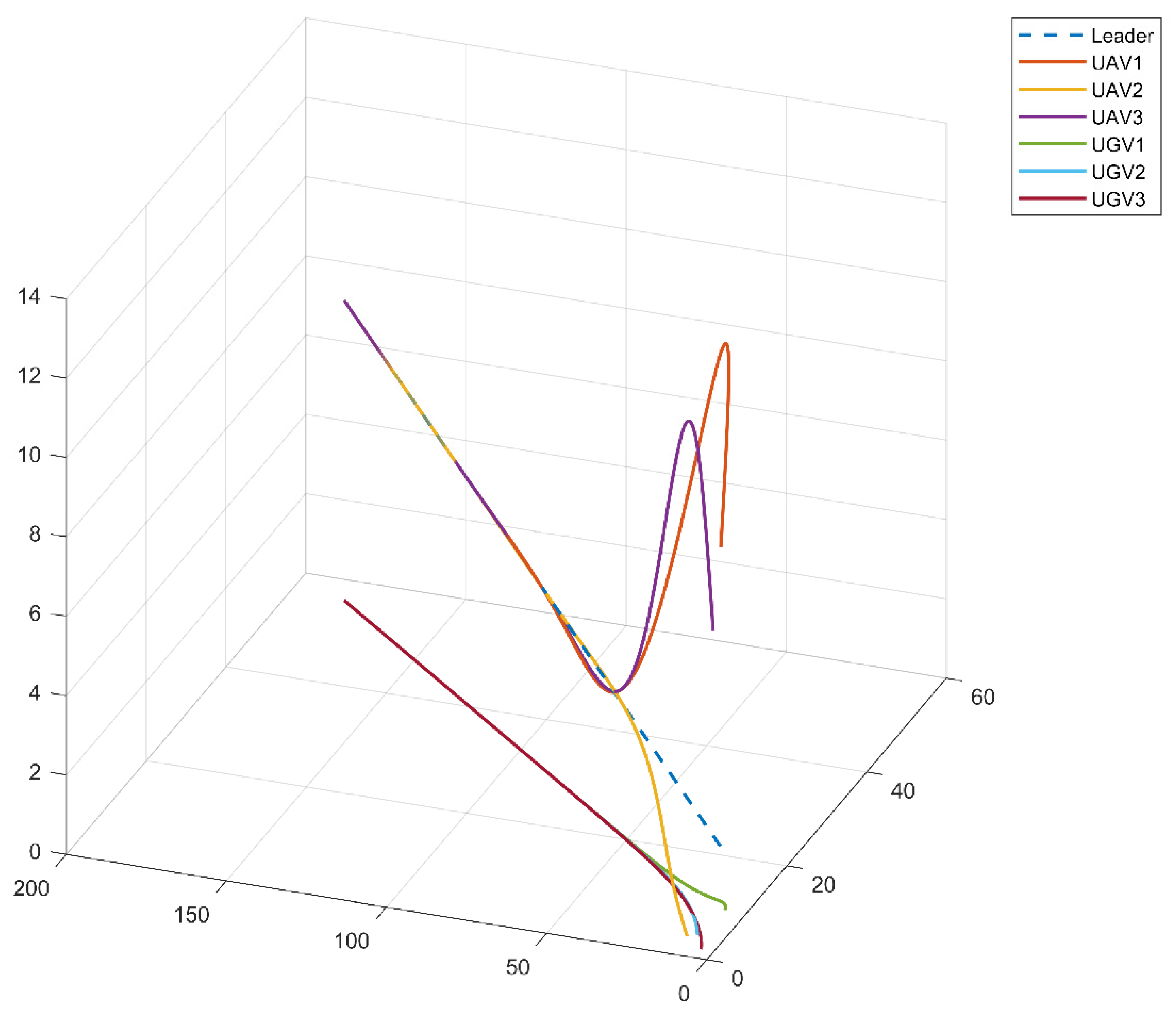
Plot the state trajectory of all UAVs and UGVs in this leader-following heterogeneous multi-agent system, as shown in Figure 13. The experimental outcomes show that the states of all following UAVs and UGVs converge to the leader’s position and velocity. It further demonstrates the efficiency and feasibility of the algorithm (31)(33).
5. Conclusions
This paper analyzes the dynamic models of uncrewed aerial vehicles and uncrewed ground vehicles to establish a heterogeneous system. Firstly, building upon the communication topology of heterogeneous multi-agent systems. The fault-tolerant consensus control problem of the leader-follower multi-agent system under actuator partial failure is introduced. Based on the Euler-Lagrange equations, performance index functions are defined for each following UGV and UAV. Then, the optimal fault-tolerant consensus controller capable of handling actuator partial failure is obtained through optimization theory, and the proposed algorithm’s stability is demonstrated using Lyapunov stability theory. Finally, MATLAB simulation experiments further corroborate the efficacy of the proposed algorithm. The algorithm ensures that UAVs and UGVs eventually converge to the leader's position and velocity. In the next step, the research will focus on collaborative control of heterogeneous multi-agent systems, integrated with fault-tolerant mechanisms. and the theoretical results will be applied to engineering practice.
Author Contributions
Conceptualization, Y.L. and Y.L.; methodology, Y.L.; software, L.Z.; validation, Y.L., Y.L. and L.Z.; resources, Z.Z.; writing original draft preparation, Y.L.; writing review and editing, Y.L.; supervision, L.Z.; funding acquisition, Z.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (61872204), the Scientific Research Project of Heilongjiang Provincial Universities, China (Grant No.145309313).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author: Yongan Liu, upon reasonable request.
Acknowledgments
We appreciate all the authors for their contributions and the support of the foundation.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhao, W.; Liu, H.; Wan, Y. J. S.; Letters, C., Data-driven fault-tolerant formation control for nonlinear quadrotors under multiple simultaneous actuator faults. 2021, 158, 105063. [CrossRef]
- Weiming, Z.; Yang, X.; Delin, L. J. B., Fixed-time formation control of quadrotor UAV swarm with unknown disturbances. 2023, 50, (5), 1702-1712. [CrossRef]
- Yang, J.; Zhang, J.; Wang, H. J. I. T. o. I. T. S., Urban traffic control in software defined internet of things via a multi-agent deep reinforcement learning approach. 2020, 22, (6), 3742-3754. [CrossRef]
- Ma, X.; Yang, P.; Dong, H.; Yang, J.; Zhao, Y. In Secondary control strategy of islanded micro-grid based on multi-agent consistency, 2017 IEEE Conference on Energy Internet and Energy System Integration (EI2), 2017; IEEE: 2017; pp 1-6.
- Huang, M.; Ding, L.; Li, W.; Chen, C.-Y.; Liu, Z. J. I. T. o. C.; Papers, S. I. R., Distributed observer-based H∞ fault-tolerant control for DC microgrids with sensor fault. 2021, 68, (4), 1659-1670. [CrossRef]
- Chen, T.-T.; Wang, F.-Y.; Xia, C.-Y.; Chen, Z.-Q. J. N., Leader-following consensus of second-order multi-agent systems with intermittent communication via persistent-hold control. 2022, 471, 183-193. [CrossRef]
- Cong, Y.; Du, H.; Liu, B.; Zhang, P.; Li, X. J. I. S., Distributed constrained finite-time consensus algorithm for second-order multi-agent systems. 2023, 626, 773-786. [CrossRef]
- Jiao, L.; Xin, W.; Hongchao, L. J. J. o. S. S.; Sciences, M., Observer-Based Consensus for Multi-Agent Systems Subject to Consecutive DoS Attacks. 42, (7), 1715.
- Ma, Q.; Xu, S. J. I. T. o. C., Consensus switching of second-order multiagent systems with time delay. 2020, 52, (5), 3349-3353. [CrossRef]
- Chu, H.; Gao, L.; Zhang, W. J. I. C. T.; Applications, Distributed adaptive containment control of heterogeneous linear multi-agent systems: an output regulation approach. 2016, 10, (1), 95-102. [CrossRef]
- Cai, H.; Huang, J. J. A., Output based adaptive distributed output observer for leader–follower multiagent systems. 2021, 125, 109413. [CrossRef]
- Yu, T.; Wu, Q.; Song, Z. In Finite-time Output Consensus for a Class of Heterogeneous Linear Multi-agent Systems via an Output Regulation Approach, 2021 33rd Chinese Control and Decision Conference (CCDC), 2021; IEEE: 2021; pp 6533-6538.
- Lv, M.; Ahn, C. K.; Zhang, B.; Fu, A. J. I. T. o. A.; Systems, E., Fixed-time anti-saturation cooperative control for networked fixed-wing unmanned aerial vehicles considering actuator failures. 2023.
- Sun, F.; Liu, P.; Li, H.; Zhu, W. J. I. J. o. S. S., Fixed-time consensus of heterogeneous multi-agent systems based on distributed observer. 2021, 52, (9), 1780-1789. [CrossRef]
- Shi, X.; Xu, L.; Yang, T.; Lin, Z.; Wang, X. J. I. T. o. C.; Briefs, S. I. E., Distributed fixed-time resource allocation algorithm for the general linear multi-agent systems. 2022, 69, (6), 2867-2871. [CrossRef]
- Zhang, H.; Duan, J.; Wang, Y.; Gao, Z. J. I. t. o. c., Bipartite fixed-time output consensus of heterogeneous linear multiagent systems. 2019, 51, (2), 548-557. [CrossRef]
- Liu, Z.; Yu, X.; Yuan, C.; Zhang, Y. In Leader-follower formation control of unmanned aerial vehicles with fault tolerant and collision avoidance capabilities, 2015 International Conference on Unmanned Aircraft Systems (ICUAS), 2015; IEEE: 2015; pp 1025-1030.
- Yu, Z.; Zhang, Y.; Qu, Y.; Su, C.-Y.; Zhang, Y.; Xing, Z. In Fault-tolerant adaptive neural control of multi-UAVs against actuator faults, 2019 International Conference on unmanned aircraft Systems (ICUAS), 2019; IEEE: 2019; pp 421-426.
- Liu, W.; Zhang, K.; Jiang, B.; Yan, X. J. A. J. o. C., Adaptive fault-tolerant formation control for quadrotors with actuator faults. 2020, 22, (3), 1317-1326.
- Liu, D.; Liu, H.; Xi, J. J. A. S.; Technology, Fully distributed adaptive fault-tolerant formation control for octorotors subject to multiple actuator faults. 2021, 108, 106366. [CrossRef]
- Zheng, Z.; Qian, M.; Li, P.; Yi, H. J. I. A., Distributed adaptive control for UAV formation with input saturation and actuator fault. 2019, 7, 144638-144647. [CrossRef]
- Deng, C. J. I. T. o. S., Man,; Systems, C., Cooperative fault-tolerant output regulation of linear heterogeneous multiagent systems under directed network topology. 2019, 51, (8), 4773-4781. [CrossRef]
- Yang, P.; Ding, Y.; Hu, X.; Zhang, Z.; Wang, Z. J. T. o. t. I. o. M.; Control, Sliding mode fault-tolerant consensus control for heterogeneous multi-agent systems based on finite-time observer and controller. 2023, 45, (11), 2081-2090. [CrossRef]
- Vamvoudakis, K. G.; Lewis, F. L.; Hudas, G. R. J. A., Multi-agent differential graphical games: Online adaptive learning solution for synchronization with optimality. 2012, 48, (8), 1598-1611. [CrossRef]
- Zhao, J.; Dai, F.; Song, Y. In Consensus of heterogeneous mixed-order multi-agent systems including UGV and UAV, Proceedings of 2021 Chinese Intelligent Systems Conference: Volume III, 2022; Springer: 2022; pp 202-210.
Figure 1.
Consistency error in the X-direction position between the following UAV, UGV, and the leader.
Figure 1.
Consistency error in the X-direction position between the following UAV, UGV, and the leader.
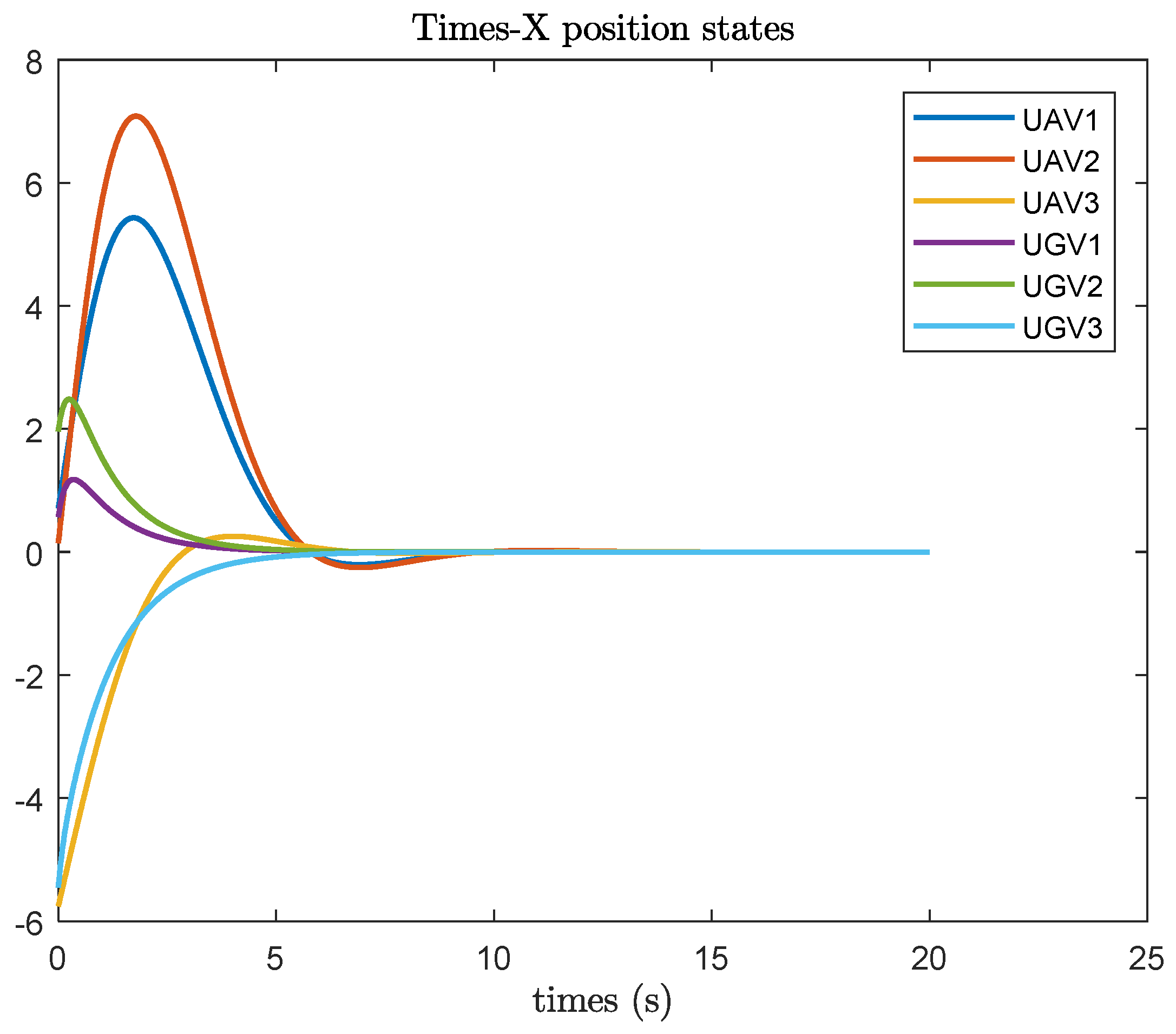
Figure 2.
The position variables of UAV and UGV in the X-direction are in reference [25].
Figure 2.
The position variables of UAV and UGV in the X-direction are in reference [25].
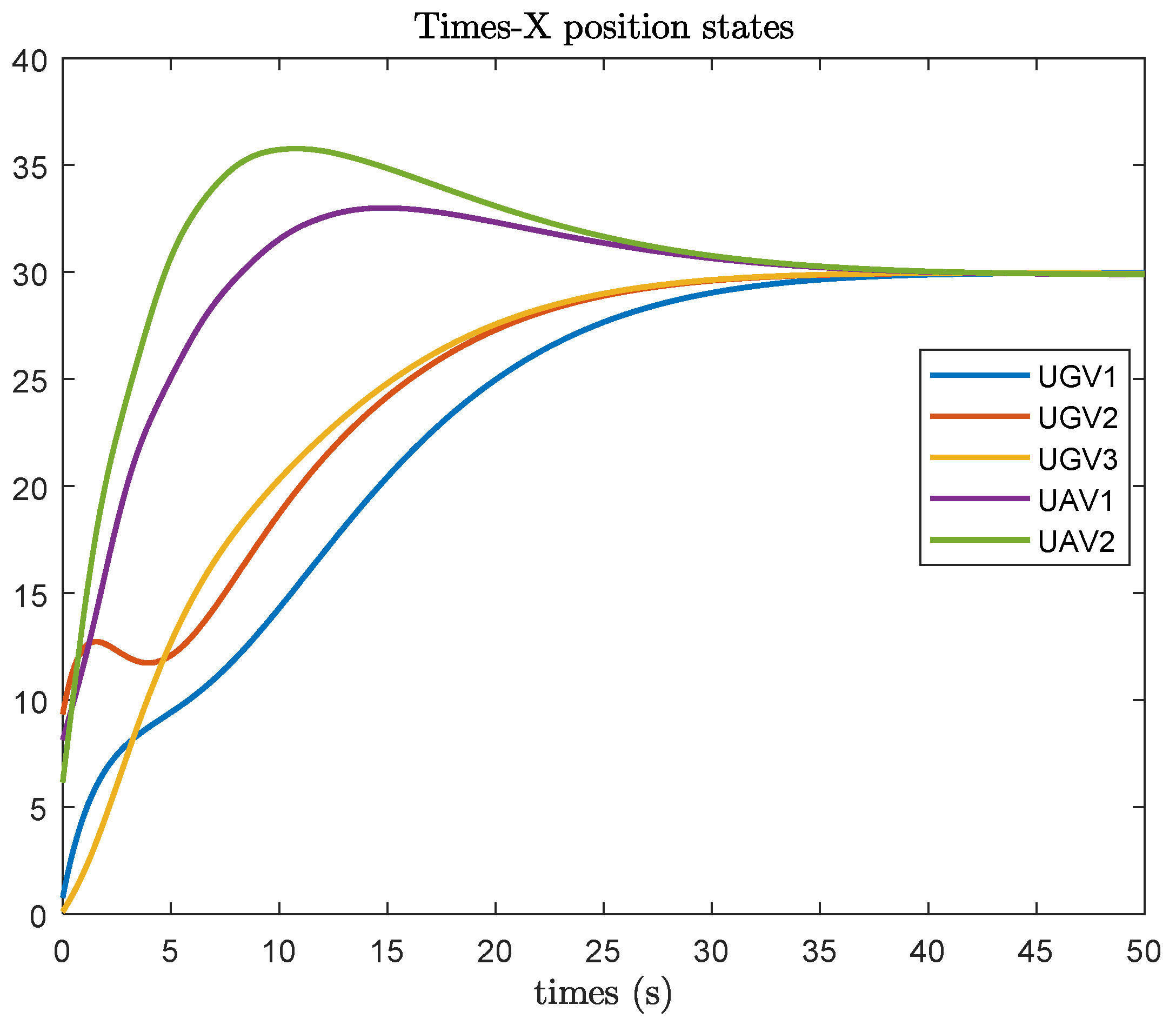
Figure 13.
State trajectory plot of the leader-following heterogeneous multi-agent system.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



