
Submitted:
22 July 2024
Posted:
22 July 2024
You are already at the latest version
Abstract
This study introduces a novel method for early prediction of Kimchi cabbage (Brassica rapa subsp. pekinensis (Lour.) Hanelt) height, utilizing drone imagery and a long short-term memory (LSTM) model. The research was conducted on a testbed at the National Institute of Agricultural Sciences (NAS) in South Korea, encompassing two distinct soil types (loam and sandy loam) to investigate their impact on growth. High-resolution drone images were captured throughout the growing season to generate a canopy height model (CHM) for estimating plant height at various stages. Missing height data were interpolated using a logistic growth curve, and an LSTM model was trained on this data to predict the final height of Kimchi cabbage at harvest. Three LSTM models were developed using time-series data collected at 29, 36, and 44 days after planting (DAP). The model trained on data from DAP 44 demonstrated the highest accuracy with a coefficient of determination (R²) of 0.83, a mean absolute error (MAE) of 2.48 cm, and a root mean square error (RMSE) of 3.26 cm, outperforming models trained on earlier data. Color-coded maps were generated to visualize the spatial distribution of predicted Kimchi cabbage heights, revealing variations in growth patterns across the testbed and confirming the model's potential for site-specific management. Considering the trade-off between accuracy and prediction timing, the model trained on DAP 36 data (MAE = 2.77 cm) was deemed optimal for informing cultivation management decisions. This research demonstrates the feasibility and effectiveness of integrating drone imagery, logistic growth curves, and LSTM models for early and accurate prediction of Kimchi cabbage height. The proposed technology enables data-driven decision-making for farmers, facilitating timely interventions based on predicted growth patterns. This could lead to improved crop yields, resource optimization, and a more sustainable agricultural future. Future research will focus on refining the model's accuracy and exploring its applicability to other crops, further expanding the potential of precision agriculture technologies.
Keywords:
Drone Imagery
; Long Short-Term Memory
; Kimchi Cabbage
; Growth Prediction
; Precision Agriculture
1. Introduction
South Korea's agricultural sector faces a confluence of challenges. A rapidly aging population and the ongoing COVID-19 pandemic have exacerbated the existing shortage of agricultural labor, hindering essential farm management practices like crop growth, fertilization, and harvesting [1]. These difficulties are further compounded by the complex monitoring requirements due to South Korea's hilly terrain and the diverse cultivation conditions across various crops. This is particularly true for Kimchi cabbage (Brassica rapa subsp. pekinensis (Lour.) Hanelt), a key outdoor crop cultivated in small-scale environments with varying topography, making manual field monitoring a significant challenge [2].
The South Korean Government’s Digital New Deal initiative aims to address these challenges by promoting digital agriculture [3]. This approach leverages data, networks, and artificial intelligence (AI) to enhance agricultural productivity and precision [4,5]. Digital agriculture has the potential to increase farm income, automation, and sustainability. However, a significant gap exists in open-field digital farming technologies, with most advancements focused on controlled environments like greenhouses [6,7].
Kimchi cabbage, a staple vegetable with seasonal varieties, plays a critical role in South Korea's food security and consumer prices. Autumn cabbage, with the highest production (56.4% in 2020), is particularly susceptible to price instability due to production fluctuations and climate-driven weather events [8]. Labor shortages further exacerbate these issues, leading to rising production costs, inconsistent quality, and unpredictable price fluctuations.
Fortunately, rapid advancements in digital technology offer promising solutions. AI-based digital farming technologies are being integrated with Kimchi cabbage growth information to improve production prediction accuracy and enable more scientific farming practices [9]. Traditionally, Kimchi cabbage height, a key indicator of growth, is measured manually in the field. This method requires significant manpower, is limited by weather conditions, and suffers from variations in accuracy due to the investigator's skill level [10].
Remote sensing (RS) technology emerges as a valuable alternative. While satellite RS has limitations due to weather and fixed orbital cycles, recent advancements in drone and sensor technology offer a more dynamic solution. Drones can capture high-resolution images anytime and anywhere, overcoming the limitations of satellite RS [11,12]. This facilitates the acquisition of detailed crop object and canopy features using image processing techniques. Drone RS allows for rapid, periodic field information collection, enabling scientific monitoring in combination with various analysis technologies [13]. The extracted data, such as time-series images of Kimchi cabbage growth, can then be used for Kimchi cabbage growth prediction models. Traditional methods for Kimchi cabbage phenotyping are limited. While chlorophyll fluorescence imaging has been used for Kimchi cabbage growth modeling, it primarily focuses on leaf metabolism rather than pixel-level growth prediction. This is crucial for accurately capturing the growth patterns of Kimchi cabbage over time [14].
Among available AI algorithms, long short-term memory (LSTM), a type of recurrent neural network (RNN), is particularly suitable for analyzing time-series data like crop height [15,16]. LSTM's structure addresses the vanishing gradient problem in RNNs, allowing it to learn long-term dependencies within the time-series data. LSTMs, inspired by image representation learning, offer a powerful new approach for predicting Kimchi cabbage growth at the pixel level from image sequences, enabling a deeper understanding of Kimchi cabbage responses to their environment and potentially leading to improved agricultural practices [17,18]. Compared to neural networks trained on Kimchi cabbage characteristics, LSTMs offer a data-driven approach to model the complex relationships between image sequences and Kimchi cabbage growth. The need to predict future Kimchi cabbage growth, the limitations of existing methods, and the success of LSTMs in image representation learning motivated our use of LSTM for Kimchi cabbage growth prediction.
This study aims to develop a technology for early prediction of Kimchi cabbage height using drone images and an LSTM-based prediction model. This approach has the potential to address the limitations of current methods and contribute to more efficient and accurate farm management practices, particularly for Kimchi cabbage cultivation.
2. Materials and Methods
2.1. Study Area
This study was conducted on the autumn Kimchi cabbage testbed at the National Institute of Agricultural Sciences (NAS) in Iseo-myeon, Wanju-gun, Jeonbuk, South Korea (127° 02′ 49.65″ E, 35° 49′ 28.52″ N). The 624 testbed is divided into Zone A (loam) and Zone B (sandy loam), representing the two main soil types used for Kimchi cabbage cultivation in South Korea (Figure 1). Sandy loam, with larger pores than loam, offers greater permeability. The experiment aimed to investigate the impact of these distinct soil types on Kimchi cabbage growth, while also utilizing data from both zones to enhance the versatility of the production model, even though zone-specific modeling showed promising results.
On August 29, 2019, 1,332 autumn Kimchi cabbages were planted, with 672 in Zone A and 660 in Zone B. The planting followed a 1 m spacing between ridges and 40 cm x 85 cm between individual plants. An automatic drip irrigation system, adjusted according to rainfall, was employed throughout the cultivation period. Six permanent ground control points (GCPs) were selected from concrete structures within the testbed for geo-referencing purposes (Figure 1). Coordinates from these GCPs were then used to perform geometric correction on time-series drone images captured during the study.
2.2. Workflow for Early Prediction of Kimchi Cabbage Height using Drone Imagery and LSTM Model
This study employed a five-stage workflow (Figure 2) to develop a data-driven model for early prediction of Kimchi cabbage height using drone imagery. In the first stage (data acquisition), drone images were captured throughout the growing season, while corresponding field measurements of Kimchi cabbage height were collected. Stage two (image processing) involved generating digital surface model (DSM) and canopy height model (CHM) images from the acquired drone data. Leveraging object-based extraction on CHM images in stage three, individual Kimchi cabbages were isolated, and relevant data points were extracted. Stage four focused on model build and test. Here, growth curves were generated from the extracted data to represent the temporal changes in Kimchi cabbage height. Subsequently, LSTM models were built for Kimchi cabbage height prediction. Finally, the accuracy of the models was evaluated, and the predicted heights were visualized for comparison with the actual measurements.
2.3. Comprehensive Data Acquisition Strategy for Kimchi Cabbage Height Monitoring Using Drone Imagery
A meticulous data acquisition strategy was employed to monitor Kimchi cabbage growth using drone imagery. High-resolution images of the Kimchi cabbage field were captured by Inspire2 (DJI, Shenzhen, China) drones equipped with Zenmuse-X5S (DJI, Shenzhen, China) RGB sensors (Table 1). Flight parameters, including flight path, altitude, overlap, and shooting angle, were carefully optimized considering factors such as sensor capabilities, desired image resolution, drone limitations, and flight time. To capture the temporal dynamics of plant growth, images were acquired at approximately one-week intervals, beginning on August 28, 2019, one day before planting, to establish a baseline digital surface model (DSMground) representing the bare field. A total of 13 image acquisition missions were conducted until the harvest date of November 8, 2019 (Table 2).
Autonomous drone flights were facilitated by Pix4Dcapture software (Pix4D, Prilly, Switzerland), allowing precise control over flight parameters. To enable detailed analysis of individual Kimchi cabbage plants, the drone image acquisition altitude was set to 30 meters, resulting in a ground sample distance (GSD) of approximately 0.7 cm/pixel. The total area covered by drone imagery was 4,752 . A double grid flight path with a 75° acquisition angle was chosen to optimize the accuracy of Z-axis (height) data, ensuring detailed 3D information capture of the Kimchi cabbages [19]. Each image capture cycle took approximately 10 minutes, with a longitudinal and lateral overlap of 75% and a flight speed of 3 m/s (10.8 km/h).
Acquired RGB images and cloud data were processed into DSMorthomosaics and RGBorthomosaics, which were then geometrically corrected using Pix4Dmapper software. Geometric correction ensured accurate alignment of acquired images with reference locations, enabling spatial analysis. GCPs, predefined ground locations with known coordinates established using permanent structures within the field, were used for this correction [19]. By matching image GCP locations with their corresponding coordinates for each acquisition date, image position was effectively calibrated over time, facilitating comparative analysis of Kimchi cabbage growth at the same location across images. Both GCP coordinates and the image coordinate system were unified as WGS 84 UTM zone 52 N (Figure 3).
Field measurements of Kimchi cabbage height (PHTrue) were conducted on the same dates as the drone image acquisitions, except for August 29, 2019. These measurements, taken manually using a ruler from the top of the gyrus to the top of the Kimchi cabbage leaf, were collected from 56 sample Kimchi cabbages distributed across the upper, middle, and lower zones of Zone B (18 cabbages per zone) [19]. This comprehensive data acquisition strategy provided a robust dataset of drone imagery and corresponding field measurements, serving as the foundation for subsequent analysis of Kimchi cabbage growth using LSTM techniques.
2.4. Estimation of Kimchi Cabbage Height Using Canopy Height Models Derived from Drone Imagery
RS techniques can estimate Kimchi cabbage height by analyzing changes in a DSM generated from drone-captured RGB images. The DSM is created by projecting the 3D point cloud heights, obtained using the structure from motion (SfM) algorithm, onto the corresponding 2D RGB image. Each pixel value in the DSM represents the surface elevation, and its accuracy depends on the resolution and overlap of the captured RGB images [20].
A CHM is essentially a DSM specific to each Kimchi cabbage growth stage, designed to estimate Kimchi cabbage height using drone RS imagery acquired after planting. CHM is generated by subtracting the DSMnumerical data from overlapping RGBorthomosaics captured throughout the growing season (Figure 4). The difference between CHM and DSMground provides an estimate of Kimchi cabbage height (PHgrowth stage) at each growth stage, as expressed in Equation (1):
where, PHgrowth stage is the Kimchi cabbage height for each growth stage estimated using drone RS, CHMgrowth stage is the surface model for each Kimchi cabbage growth stage, and DSMground is the unique numerical surface model of the farmland [21,22].
Kimchi cabbage height for each individual plant was estimated based on a time-series analysis of DSM and CHM images using ArcGIS Pro (ESRI, Redlands, CA, USA), a comprehensive geospatial information analysis software with functionalities for image processing, 2D/3D analysis, visualization, and data management.
2.5. Kimchi Cabbage Height Prediction Using Logistic Growth Curve Interpolation of Drone-Derived Data
The logistic growth curve, introduced by Verhulst (1845), is a well-established mathematical model used to analyze growth processes in various fields, including biology [23,24,25]. Due to its ability to represent sigmoid growth patterns, this model has been successfully applied to study crop growth trends [26,27]. The logistic growth curve can be parameterized by different functions, and the specific form used in this study is shown in Equation (2).
where, G(t) is the growth value according to time t, G0 is the initial growth value, Gmax is the maximum growth value, and k is a time-related parameter [28,29].
A key advantage of the logistic growth curve in this study is its ability to interpolate missing Kimchi cabbage height data acquired through drone imagery. This interpolation capability is crucial for obtaining a continuous growth curve. The parameters of the logistic growth curve were estimated using the least squares method based on PHgrowth stage data, which represents Kimchi cabbage height at different growth stages. Notably, the Python library Scipy and its optimization algorithms were used for efficient parameter derivation (Figure 5).
To predict Kimchi cabbage height at harvest, Kimchi cabbage growth data for each plant were collected at one-day intervals, specifically at 29, 36, and 44 days after planting (DAP). These data points served as the learning data for the logistic growth curve. The resulting growth curve was then used to train a model for predicting Kimchi cabbage height on the harvest day. In Figure 5 (a), we can see the logistic curves generated using data from three different time points (29, 36, and 44 DAP). These curves were used for model training. Figure 5 (b) illustrates the data partitioning strategy. The Kimchi cabbage data (1332 data points for each date) were divided into 70% for model training and 30% for testing, without distinction between areas A and B. The training data was further divided into 70% for learning and 30% for verification purposes.
2.6. Kimchi Cabbage Height Prediction Using LSTM Network Model with Time-Series Growth Data
RNNs are artificial neural networks (ANNs) designed for analyzing sequential data, making them suitable for time series analysis due to their cyclical architecture [30,31]. Their cyclical architecture allows them to retain information from previous processing steps, making them ideal for tasks like time series analysis. However, traditional RNNs struggle with long-term dependencies, where patterns emerge over extended sequences [32].
LSTM networks address this limitation by incorporating memory cells that can store and manage information over longer periods [18]. As illustrated in Figure 6, LSTMs employ forget gates, input gates, and output gates to regulate the flow of information within the network (Table 3) [33]. These gates determine the retention of past information, incorporation of new information, and output for the next cell in the sequence.
An LSTM model was designed to predict Kimchi cabbage height at harvest using temporal Kimchi cabbage height data. The model, built with TensorFlow in Python, utilized a three-layer structure for in-depth learning and improved prediction accuracy. It employed a three-layer structure to facilitate in-depth learning and improve prediction accuracy. The coefficient of determination (R2), mean absolute error (MAE), and root mean square error (RMSE) loss function were used for model compilation. To ensure consistency in evaluating the models trained with data from different time intervals (29, 36, and 44 DAP), the number of training iterations was fixed at 3,000 for all models.
The LSTM model received PHgrowth stage data, extracted from the logistic growth curve, as input. This data was formatted as a three-dimensional matrix encompassing Kimchi cabbages (number of data points), time steps (time intervals), and PHgrowth stage (independent variables) (Figure 6). The model was then used to predict the PHprediction (predicted height) for each Kimchi cabbage on the harvest day (November 8, 2019).
The accuracy of the PHprediction values was assessed using R2, MAE, and RMSE. These metrics were compared with the actual PHgrowth stage data obtained from drone imagery on November 8th. Finally, the predicted Kimchi cabbage heights (PHprediction) were mapped to visualize the spatial distribution of growth across the field.
3. Results
3.1. Monitoring Kimchi Cabbage Growth Using Drone Imagery and Derived Height Models
Drone imagery was successfully acquired 13 times between August 28, 2019 (one day before planting) and November 8, 2019 (harvest day) for Kimchi cabbage testbeds in NAS, South Korea. Each image acquisition captured 312 images with aGSD of approximately 0.7 cm, enabling high-resolution analysis of individual Kimchi cabbages.
Figure 7 demonstrates the effectiveness of drone imagery for monitoring Kimchi cabbage growth. The figure displays (a) RGBorthomosaics, (b) CHMs, and (c) PHgrowth stage maps for three representative dates (DAP 0, DAP 36, and DAP 71). Visual inspection of the RGBorthomosaics (Figure 7(a)) allows for general assessment of plant health based on color variations. However, this method cannot quantify Kimchi cabbage height. CHMs (Figure 7(b)) address this limitation by representing Kimchi cabbage height as the ellipsoid height within a reference coordinate system. While CHMs cannot provide the absolute height of individual plants, they enable visualization of height variations across the field over time through time series analysis. PHgrowth stage maps (Figure 7(c)) offer the most precise height information. These maps are generated by subtracting the DSMground from the CHMgrowth stage orthoimage. This numerical representation removes the influence of terrain slope, allowing for accurate extraction of Kimchi cabbage height data. As evident in Figure 7(c), the PHgrowth stage map for DAP 71 reveals slower growth in Zone A and the complete absence of Kimchi cabbages in Zone B, likely due to environmental factors.
Drone imagery combined with CHMgrowth stage and PHgrowth stage calculations provides a valuable tool for monitoring Kimchi cabbage growth. PHgrowth stage maps, in particular, offer a quantitative and spatially explicit assessment of Kimchi cabbage height throughout the growing season.
3.2. Accuracy Assessment of Kimchi Cabbage Height Estimation from Drone Imagery
This section evaluates the accuracy of Kimchi cabbage height measurements derived from drone imagery. Field surveys were conducted to collect reference data on PHTrue for 56 representative Kimchi cabbages. The Kimchi cabbage heights were measured on several dates throughout the growing season, starting from planting on August 29th, 2019. However, some Kimchi cabbages were identified as vacant hills during the September 10th survey and excluded from subsequent measurements, resulting in a final sample size of 50 Kimchi cabbages.
Figure 8(a) depicts the distribution of PHTrue values using a boxplot. The boxplot reveals a growth range of approximately 0 to 50 cm, with the most significant growth occurring between September 10th and October 4th. Additionally, the spread of PHTrue values increased substantially by October 4th, reaching a difference of about 25 cm between the maximum and minimum values. This spread then narrowed after October 12th.
To assess the accuracy of drone-based height measurements (PHgrowth stage), the maximum pixel value within a 40 cm diameter area around each Kimchi cabbage in the PHgrowth stage numerical map was extracted and compared to the corresponding PHTrue values obtained from field surveys. This comparison is visualized in the scatter plot of Figure 8(b). A linear trendline was fitted to the data points using least squares regression analysis. The slope of the trendline was approximately 0.94, indicating a slight overestimation of Kimchi cabbage height by the PHgrowth stage values, particularly for taller Kimchi cabbages. The y-intercept of -2.63 further suggests a systematic bias towards higher values in the PHgrowth stage data. While most vacant hill Kimchi cabbages were correctly identified as having low heights, some outliers with estimated heights exceeding 30 cm were observed. Figure 8(c) presents a growth curve for all Kimchi cabbages in Zones A and B, estimated using drone imagery throughout the 2019 growing season. The PHgrowth stage exhibited slow growth until DAP 12, followed by a period of rapid growth until DAP 44. From DAP 50 onwards, coinciding with the maturation and harvesting stages, the growth curve plateaus or shows minimal variation. This pattern aligns with the biological transition from vegetative growth in the pre-determinant stage to reproductive growth upon reaching the determinant stage, where Kimchi cabbage heads begin to form and solidify.
Table 4 summarizes the accuracy evaluation using MAE and RMSE. MAE provides a straightforward interpretation of the average error between the PHgrowth stage and PHTrue values. RMSE assigns higher weights to larger errors, providing insights into the distribution of errors. Overall, the MAE values varied across different growth stages but remained relatively low, averaging 4.21 cm throughout the entire monitoring period. The PHgrowth stage values exhibited an overall error of 3-6 cm compared to the measured heights, with a maximum error of less than 10% of the typical harvest-time Kimchi cabbage height (40-60 cm). While RMSE indicated the presence of some larger errors in individual Kimchi cabbage height measurements, the overall error remained acceptable for practical applications. These findings demonstrate that the Kimchi cabbage height estimates derived from drone imagery and the PHgrowth stage calculation method provide a valuable tool for monitoring Kimchi cabbage growth status.
3.3. Modeling Kimchi Cabbage Growth Dynamics Using Logistic Growth Curves
The logistic growth curve was employed to interpolate missing values in the Kimchi cabbage height data and to model the overall growth trend Figure 8(c). Figure 9 illustrates logistic growth curves for three scenarios, each representing Kimchi cabbage growth up to a specific time point: 29, 36, and 44 DAP. Additionally, a boxplot in Figure 9 visualizes the daily variations in PHgrowth stage, the estimated plant height from drone imagery.
The logistic growth curves demonstrate the model's ability to capture the dynamic growth patterns of Kimchi cabbage as the growing season progresses. The curve for DAP 29 reflects the rapid initial growth phase, while the curve for DAP 36 extends further to capture changes until the later, slower growth stage. The DAP 44 curve encompasses variations throughout the entire growth period, including the late slow growth stage.
Figure 8(c) complements Figure 9 by presenting the growth curve for all Kimchi cabbages in Zones A and B throughout the 2019 growing season. This figure reveals a slow initial growth phase (until DAP 12), followed by rapid growth (until DAP 44), and finally a plateau or minimal variation from DAP 50 onwards, coinciding with maturation and harvesting. This pattern aligns with the biological transition from vegetative to reproductive growth, where Kimchi cabbage heads form and solidify. Together, Figure 8(c)) and Figure 9 provide a comprehensive visualization of Kimchi cabbage growth dynamics throughout the growing season, captured through both raw data and the logistic growth model.
3.4. LSTM-Based Kimchi Cabbage Height Prediction for Cultivation Management: Model Training, Evaluation, and Selection
The LSTM model was trained using the logistic growth curves generated in Figure 9, representing the predicted Kimchi cabbage height at various DAP. For each Kimchi cabbage plant, the PHgrowth stage values at DAP 29, 36, and 44 were used as independent variables, while the PHgrowth stage at DAP 71 (harvest) served as the dependent variable.
The model training was conducted on a workstation equipped with an Intel Core i9-10940X CPU and an NVIDIA GeForce RTX 3080 Ti GPU. Each iteration of the training process took approximately 30 milliseconds, with a total of 3,000 iterations completed in 30 seconds. The model output was divided into verification and testing datasets (30% of the data) to assess learning accuracy and predictive power on unseen data, respectively.
Table 5 summarizes the learning results for the three models (DAP 29, 36, and 44). All models exhibited good consistency, with low differences (<0.04) between verification and testing, and minimal differences between MAE and RMSE (within 0.5 cm), suggesting no significant overfitting. The test results revealed increasing prediction accuracy with longer time steps for learning, with the DAP 44 model achieving the highest accuracy (MAE of 2.23 cm), followed by DAP 36 (MAE of 2.77 cm) and DAP 29 (MAE of 4.35 cm).
Figure 10 presents the predicted Kimchi cabbage height maps generated by applying the three models to the entire field. The results indicate that predicted heights in Zone A (loam) ranged primarily from 30 to 40 cm, while Zone B (sandy loam) exhibited heights between 40 and 55 cm. This 10-15 cm difference aligns with observed soil condition variations and the slightly faster growth rates reported for Kimchi cabbage in loam compared to sandy loam [10]. This trend is further reflected in the smaller height discrepancies between measured and predicted values in sandy loam (Zone B) during early growth stages (Figure 10(a)).
While the DAP 44 model offered the highest accuracy, its timing near the end of growth limits its applicability for cultivation management interventions. The DAP 36 model, despite slightly lower accuracy, achieved reasonable prediction errors (MAE 2.77 cm, RMSE 3.74 cm for DAP 71) and coincides with ongoing vegetative growth, allowing for timely adjustments to the agricultural plan. Therefore, considering the trade-off between accuracy and growth stage, the DAP 36 model was deemed most suitable for informing cultivation management decisions.
3.5. Visualizing Kimchi Cabbage Height Predictions with Spatiotemporal Maps for Targeted Crop Management
The predicted final height (PHprediction) of each Kimchi cabbage obtained from the LSTM model was used to generate color-coded maps. Each map divided the predicted heights into 10 cm intervals, with distinct colors representing different height ranges (Figure 11).
Figure 11 presents a reference map for comparison, constructed based on the DAP 71 (harvest day) predictions from each model and a field image captured on November 8, 2019. Zone A (loam soil) and Zone B (sandy loam) in the reference map exhibit distinct characteristics due to soil composition. Zone A primarily shows Kimchi cabbage heights ranging from 30 to 50 cm, while Zone B displays a higher concentration of Kimchi cabbages exceeding 40 cm. Additionally, the reference map includes features marked by arrows, indicating a general trend of decreasing Kimchi cabbage height in Zone A and locations with frequent vacant hills (Figure 11(b)).
The Kimchi cabbage height prediction maps for DAP 29, DAP 36, and DAP 44 were compared visually with the reference map (Figure 11). Here's a detailed breakdown of the comparisons:
DAP 29: The model captured the overall height distribution in Zones A and B, with Zone B showing higher values. However, it failed to accurately reflect the decreasing height trend in Zone A (a) and the vacant hill characteristics (b), predicting heights of 20-50 cm which deviated from the measured values. Zone B displayed a generally similar pattern, although the lower right sections were underestimated.
DAP 36: This model achieved a more accurate prediction, particularly in the northern region of Zone A, where Kimchi cabbage heights of 20-40 cm were well aligned with the reference map. The vacant hill area (b) also showed similar values and distribution trends. Overall, the DAP 36 model was considered suitable for Kimchi cabbage height prediction, coinciding with a period of moderate Kimchi cabbage growth, which is valuable for informed growth prediction, prescription, and management practices.
DAP 44: While exhibiting the most similar overall distribution tendency to the reference map in both zones, the DAP 44 model yielded slightly higher predictions in the northern part of Zone A and slightly lower predictions in the southern part. Zone B was also generally underestimated. Despite these discrepancies, both DAP 36 and DAP 44 models successfully captured the key features observed in the reference map.
By visually analyzing the prediction maps, it was evident that the DAP 36 model results most closely resembled the measured values. When combined with the error evaluation from the previous section, the DAP 36 model emerged as the preferable choice for informing agricultural planning decisions. This preference stems from the DAP 36 model's ability to predict Kimchi cabbage height during a critical growth stage, allowing for timely interventions through fertilization or chemical treatments if necessary. While the DAP 44 model offered slightly higher accuracy, the timing of its prediction (closer to harvest) limits its applicability for growth-related management practices.
In conclusion, the Kimchi cabbage height prediction maps generated from the LSTM model provide a valuable tool for visualizing and analyzing spatial variations in Kimchi cabbage growth. The DAP 36 model, in particular, offers a practical solution for precision agriculture applications by enabling informed decision-making during the crucial growth stages of Kimchi cabbage cultivation.
4. Discussion
4.1. Limitations of RGB Orthoimages and CHM Data for Kimchi Cabbage Height Estimation
While the RGBorthoimage (Figure 7(a)) provides a visual representation of Kimchi cabbage growth over time, its color information (digital numbers) does not directly translate to numerical height measurements. Similarly, the CHMgrowth stage orthoimage (Figure 7(b)) depicts Kimchi cabbage height relative to a reference coordinate system but cannot directly determine absolute height at specific dates.
RGBorthoimage (Figure 7(a)) provide valuable visual information on Kimchi cabbage growth patterns over time, but their color information (digital numbers) does not directly translate to quantitative height measurements. Similarly, CHMgrowth stage orthoimage (Figure 7(b)) visualize relative height differences between plants and the ground, but they cannot determine the absolute height of individual cabbages at specific dates. This limitation arises because CHMs represent relative height variations rather than absolute measurements. Consequently, while RGBorthoimage and CHMs offer valuable qualitative insights into growth patterns and potential anomalies, they lack the precision required for accurate height estimation and growth modeling.
To address this limitation, this study employed the PHgrowth stage calculation method, which derives numerical height information by subtracting the digital surface model of the bare ground (DSMground) from the CHMgrowth stage orthoimage. This subtraction effectively removes the influence of terrain variations, enabling a more accurate estimation of Kimchi cabbage height at each growth stage. By incorporating this method, the study was able to leverage the visual information from drone imagery and transform it into quantitative data suitable for growth analysis and modeling.
4.2. Advantages of High-Resolution CHM Data for Kimchi Cabbage Monitoring
The high-resolution CHM data (0.75 cm) acquired in this study provides several advantages for monitoring Kimchi cabbage growth. Firstly, it enables the visualization of individual Kimchi cabbage heights within the field, facilitating the assessment of plant-level growth characteristics and the identification of vacant hills. This is particularly valuable for early detection of growth irregularities or potential issues that may require intervention. Secondly, the high-resolution CHM data allows for detailed tracking of the growth process over time, providing valuable insights into the plant's response to various environmental factors and management practices. This temporal monitoring capability is essential for understanding growth patterns and optimizing cultivation strategies. Finally, the ability to visualize individual plant heights and monitor growth progress can be leveraged for quality control purposes. By identifying plants that deviate significantly from the expected growth trajectory, growers can implement targeted interventions to ensure uniform crop development and maximize yield potential. Overall, the high-resolution CHM data derived from drone imagery proves to be a valuable tool for enhancing precision agriculture practices in Kimchi cabbage cultivation.
4.3. Overestimation of Kimchi Cabbage Height
The study identified a consistent overestimation of Kimchi cabbage height in the drone-derived measurements (PHgrowth stage). This discrepancy is primarily attributed to the inclusion of neighboring Kimchi cabbage leaves within the area of interest (AOI) during height extraction. As Kimchi cabbages grow and their leaves expand, they often overlap with neighboring plants, leading to an overestimation of individual plant height when using a fixed AOI. This effect is more pronounced in the later growth stages when plant density and leaf overlap are highest.
To address this issue and improve the accuracy of height estimation, future research should focus on developing more sophisticated Kimchi cabbage object classification algorithms. These algorithms could better distinguish individual plants and their leaves, even in densely planted fields with significant leaf overlap. By accurately delineating the boundaries of each Kimchi cabbage, the height extraction process can be refined, leading to more precise measurements and improved overall accuracy of the growth model.
4.4. Logistic Function and Growth Stage Prediction
This study successfully demonstrated the effectiveness of the logistic function in capturing the growth patterns of Kimchi cabbage. The logistic model accurately represented the sigmoidal growth curve observed in Kimchi cabbage, highlighting its potential for predicting final plant height using data collected at specific growth stages. By leveraging the logistic function's ability to model growth dynamics, we were able to estimate the final height of Kimchi cabbage by training the model on height data corresponding to periods of significant growth variation. This approach allows for early prediction of yield potential and facilitates timely decision-making in crop management practices.
The choice of specific growth stages for data collection is crucial for accurate prediction. In this study, the model trained on data collected during periods of active growth exhibited the highest prediction accuracy. This finding underscores the importance of selecting appropriate growth stages that capture the key inflection points in the growth curve, as these periods provide the most informative data for modeling and predicting final height. Further research could explore the optimal combination of growth stages for data collection to further enhance the accuracy and reliability of the logistic model for Kimchi cabbage height prediction.
4.5. Prediction Accuracy and Future Advancements
The model development and comparisons in this study were performed using drone-derived height estimates. While image accuracy can influence the resulting interpretation accuracy, practically measuring the height of every Kimchi cabbage in a large field is challenging. This study highlights the potential and methodology for predicting Kimchi cabbage height solely based on drone imagery.
Despite the promising results, the current prediction accuracy could be further improved. The limitations in image resolution and Kimchi cabbage object segmentation techniques can introduce errors in height estimation, which may propagate to the final prediction. As drone technology and image processing algorithms continue to advance, we can expect significant improvements in both image resolution and object segmentation accuracy. Higher resolution images would allow for more precise measurement of plant height, while improved segmentation algorithms would enable more accurate identification of individual Kimchi cabbage plants and their leaves, even in dense canopies.
Additionally, integrating data from other sensors, such as multispectral or hyperspectral cameras, could provide valuable information on plant health and vigor, which could be incorporated into the prediction model to enhance its accuracy and robustness. By combining high-resolution drone imagery with advanced data analysis techniques and additional sensor data, we can develop more sophisticated and accurate prediction models for Kimchi cabbage growth, ultimately leading to improved decision-making and resource optimization in agricultural practices.
4.6. Potential of LSTM model and Future Research
The LSTM model's potential extends beyond Kimchi cabbage height prediction. By incorporating additional environmental data, such as temperature, humidity, and soil moisture, alongside height measurements, the model can be employed for more comprehensive Kimchi cabbage growth analysis. This integrative approach would enable a deeper understanding of the complex interactions between environmental factors and plant growth dynamics, ultimately leading to more accurate and robust growth predictions.
Furthermore, the LSTM model's versatility allows for its application to other crops with similar growth patterns. By adapting the model's architecture and input features, it can be used to predict the growth of various agricultural crops, contributing to more efficient and precise farming practices.
Future research should focus on refining the LSTM model by incorporating additional data sources and exploring different model architectures. This could include investigating the use of multi-spectral or hyperspectral imagery to capture additional plant traits, as well as experimenting with different LSTM configurations to optimize prediction accuracy. By continuously refining and expanding the capabilities of the LSTM model, we can unlock its full potential for transforming agricultural practices and promoting sustainable crop production.
5. Conclusions
This study successfully developed a novel method for early prediction of Kimchi cabbage height using drone imagery and an LSTM-based prediction model. High-resolution drone images were acquired throughout the growing season, and a canopy height model (CHM) was generated to estimate plant height at different growth stages. The logistic growth curve effectively interpolated missing height data and captured the dynamic growth patterns of Kimchi cabbage. An LSTM model was then trained on the interpolated height data to predict the final height at harvest.
Our results demonstrate the feasibility and accuracy of using drone imagery and LSTM models for Kimchi cabbage height prediction. The model achieved satisfactory prediction accuracy, with a MAE of 2.77 cm for the model trained on data collected at 36 days after planting (DAP). This model was deemed most suitable for informing cultivation management decisions due to its balance between accuracy and the timing of prediction during the active growth phase.
The spatial distribution of predicted Kimchi cabbage heights was visualized using color-coded maps, revealing distinct growth patterns between different soil types. The model accurately captured the slower growth in loam soil compared to sandy loam, highlighting its potential for site-specific management decisions.
This study contributes to the field of precision agriculture by providing a practical and efficient method for early prediction of Kimchi cabbage height. The proposed technology can aid farmers in optimizing their cultivation practices by enabling timely interventions such as fertilization or chemical treatments based on predicted growth patterns. This could lead to improved crop yields, resource optimization, and ultimately, increased profitability for farmers.
However, there are limitations to be addressed in future research. The accuracy of height estimation from drone imagery could be further improved by developing more advanced object segmentation algorithms that can better distinguish individual Kimchi cabbage and their leaves, especially in dense canopies. Additionally, incorporating environmental data such as temperature, humidity, and soil moisture into the model could enhance its predictive power and robustness.
In conclusion, this study demonstrates the potential of integrating drone imagery, logistic growth curves, and LSTM models for early prediction of Kimchi cabbage height. This technology holds promise for transforming agricultural practices and promoting sustainable crop production by enabling data-driven decision-making and targeted interventions. Future research should focus on refining the model's accuracy and exploring its applicability to other crops, paving the way for a more efficient and sustainable agricultural future.
6. Patents
This paper has nothing to do with applications for intellectual property rights such as patents.
Author Contributions
Conceptualization, Go, S.H.; methodology, Go, S.H.; software, Go, S.H.; validation, Park, J.H.; formal analysis, Go, S.H. and Park J.H.; investigation, Go, S.H. and Park, J.H.; resources, Go, S.H.; data curation, Go, S.H.; writing—original draft preparation, Go, S.H.; writing—review and editing, Park, J.H.; visualization, Go, S.H.; supervision, Park, J.H.
Funding
This study received no funding.
Data Availability Statement
Not applicable.
Acknowledgments
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Park, C.; Park, J. COVID-19 and the Korean economy: When, how, and what changes? Asian Journal of Innovation and Policy 2020, 9, 187–206. [Google Scholar] [CrossRef]
- Kim, Y.J.; Suh, D.S.; Park, J.Y.; Park, Y.G. Smart farm operation status analysis and development direction research; Ministry of Agriculture, Food and Rural Affairs: Sejong, KOR, 2016; p. 122. [Google Scholar]
- Ahn, E.Y.; Lee, J.W.; Bae, J.H.; Kim, J.M. Analysis of Emerging Geo-technologies and Markets Focusing on Digital Twin and Environmental Monitoring in Response to Digital and Green New Deal. Econ. Environ. Geol. 2020, 53, 609–617. [Google Scholar] [CrossRef]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Lee, D.H.; Jeong, C.H.; Go, S.H.; Park, J.H. Evaluation of Applicability of RGB Image Using Support Vector Machine Regression for Estimation of Leaf Chlorophyll Content of Onion and Garlic. Korean J. Remote Sens. 2021, 37, 1669–1683. [Google Scholar] [CrossRef]
- Park, J.Y.; Suh, D.S.; Lee, J.M. The Future of Agriculture, Digital Agriculture. In Agriculture Outlook 2021 Korea: Changes and Future of Agriculture and Rural Areas after COVID-19; Korea Rural Economic Institute: Naju, KOR, 2021; pp. 159–187. [Google Scholar]
- Song, K.E.; Jung, J.G.; Cho, S.H.; Kim, J.Y.; Shim, S.I. Development of Smart Digital Agriculture Technology for Food Crop Production in Korea-The Path Forward Based on Expert Feedback. Korean J. Crop Sci. 2022, 67, 27–40. [Google Scholar] [CrossRef]
- Service, K.S.I. Vegetable Production (Leafy Vegetables). Available online: https://kosis.kr/ (accessed on 2 May).
- Kim, K.D.; Suh, J.T.; Lee, J.N.; Yoo, D.L.; Kwon, M.; Hong, S.C. Evaluation of Factors Related to Productivity and Yield Estimation Based on Growth Characteristics and Growing Degree Days in Highland Kimchi Cabbage. Korean J. Hortic. Sci. Technol. 2015, 33, 911–922. [Google Scholar] [CrossRef]
- Go, S.H.; Lee, D.H.; Na, S.I.; Park, J.H. Analysis of Growth Characteristics of Kimchi Cabbage Using Drone-Based Cabbage Surface Model Image. Agriculture 2022, 12, 216. [Google Scholar] [CrossRef]
- Na, S.I.; Lee, Y.H.; Ryu, J.H.; Lee, D.H.; Shin, H.S.; Kim, S.J.; Cho, J.I.; Park, J.H.; Ahn, H.y.; So, K.H.; et al. Preparation and Application of Cultivation Management Map Using Drone - Focused on Spring Chinese Cabbage -. Korean J. Remote Sens. 2021, 37, 637–648. [Google Scholar] [CrossRef]
- Sugiura, R.; Noguchi, N.; Ishii, K. Remote-Sensing Technology for Vegetation Monitoring Using an Unmanned Helicopter. Biosyst. Eng. 2005, 90, 369–379. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Daloye, A.M.; Erkbol, H.; Fritschi, F.B. Crop Monitoring Using Satellite/UAV Data Fusion and Machine Learning. Remote Sens. 2020, 12, 1357. [Google Scholar] [CrossRef]
- Kim, D.W.; Yun, H.S.; Jeong, S.J.; Kwon, Y.S.; Kim, S.G.; Lee, W.S.; Kim, H.J. Modeling and Testing of Growth Status for Chinese Cabbage and White Radish with UAV-Based RGB Imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (RNN) and Long Short-Term Memory (LSTM) network. Phys. D: Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Moshou, D.; Alexandridis, T.; Whetton, R.L.; Mouazen, A.M. Wheat Yield Prediction Using Machine Learning and Advanced Sensing Techniques. Comput. Electron. Agric. 2016, 121, 57–65. [Google Scholar] [CrossRef]
- Chen, S.; Li, B.; Cao, J.; Mao, B. Research on Agricultural Environment Prediction Based on Deep Learning. Procedia Comput. Sci. 2018, 139, 33–40. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height Estimation of Sugarcane Using an Unmanned Aerial System (UAS) Based on Structure from Motion (SfM) Point Clouds. Int. J. Remote Sens. 2017, 38, 2218–2230. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. UAV-Based Imaging for Multi-Temporal, very High Resolution Crop Surface Models to Monitor Crop Growth Variability. Photogramm. Fernerkundung, Geoinformation 2013, 2013, 551–562. [Google Scholar] [CrossRef] [PubMed]
- Na, S.I.; Park, C.W.; So, K.H.; Ahn, H.y.; Lee, K.D. Development of Biomass Evaluation Model of Winter Crop Using RGB Imagery Based on Unmanned Aerial Vehicle. Korean J. Remote Sens. 2018, 34, 709–720. [Google Scholar] [CrossRef]
- Bacaër, N. Verhulst and the logistic equation (1838). In A short history of mathematical population dynamics; Springer: London, UK, 2011; pp. 35–39. [Google Scholar]
- Berkson, J. Application of the Logistic Function to Bio-assay. J. Am. Stat. Assoc. 1944, 39, 357–365. [Google Scholar] [CrossRef]
- Verhulst, P.F. Mathematical Research on the Law of Population Increase. Nouv. Mem. Acad. R. Sci. Bruxelles 1845, 18, 1–41. [Google Scholar]
- Malavika, B.; Marimuthu, S.; Joy, M.; Nadaraj, A.; Asirvatham, E.S.; Jeyaseelan, L. Forecasting COVID-19 Epidemic in India and High Incidence States Using SIR and Logistic Growth Models. Clin. Epidemiology Glob. Health 2021, 9, 26–33. [Google Scholar] [CrossRef] [PubMed]
- Oliver, F.R. Methods of Estimating the Logistic Growth Function. J. R. Stat. Soc. Ser. C: Appl. Stat. 1964, 13, 57–66. [Google Scholar] [CrossRef]
- Ji, L.Q. Analysis of a Modified Logistic Model for Describing the Growth of Durable Customer Goods in China. Math. Comput. Appl. 2013, 18, 30–37. [Google Scholar] [CrossRef]
- Wilson, D.L. The Analysis of Survival (Mortality) Data: Fitting Gompertz, Weibull, and Logistic Functions. Mech. Ageing Dev. 1994, 74, 15–33. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Wen, R.; Zhang, K.; Zhang, L. A Novel RNN-Based Blood Glucose Prediction Approach Using Population and Individual Characteristics. In Proceedings of the 2019 IEEE 7th International Conference on Bioinformatics and Computational Biology (ICBCB), Hangzhou, CHN, 21-23 March 2019; pp. 145–149. [Google Scholar]
- Zhang, J.S.; Xiao, X.C. Predicting Chaotic Time Series Using Recurrent Neural Network. Chinese Phys. Lett. 2000, 17, 88–90. [Google Scholar] [CrossRef]
- Hochreiter, S. The Vanishing Gradient Problem during Learning Recurrent Neural Nets and Problem Solutions. Int. J. Uncertain. Fuzziness Knowlege-Based Syst. 1998, 6, 107–116. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A Review of Recurrent Neural Networks: LSTM Cells and Network Architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
Figure 1.
Location and layout of the Kimchi cabbage testbed at the National Institute of Agricultural Sciences (NAS), South Korea. The testbed is divided into Zone A (loam soil) and Zone B (sandy loam soil). GCPs indicate ground control points used for geometric correction of drone images.
Figure 1.
Location and layout of the Kimchi cabbage testbed at the National Institute of Agricultural Sciences (NAS), South Korea. The testbed is divided into Zone A (loam soil) and Zone B (sandy loam soil). GCPs indicate ground control points used for geometric correction of drone images.
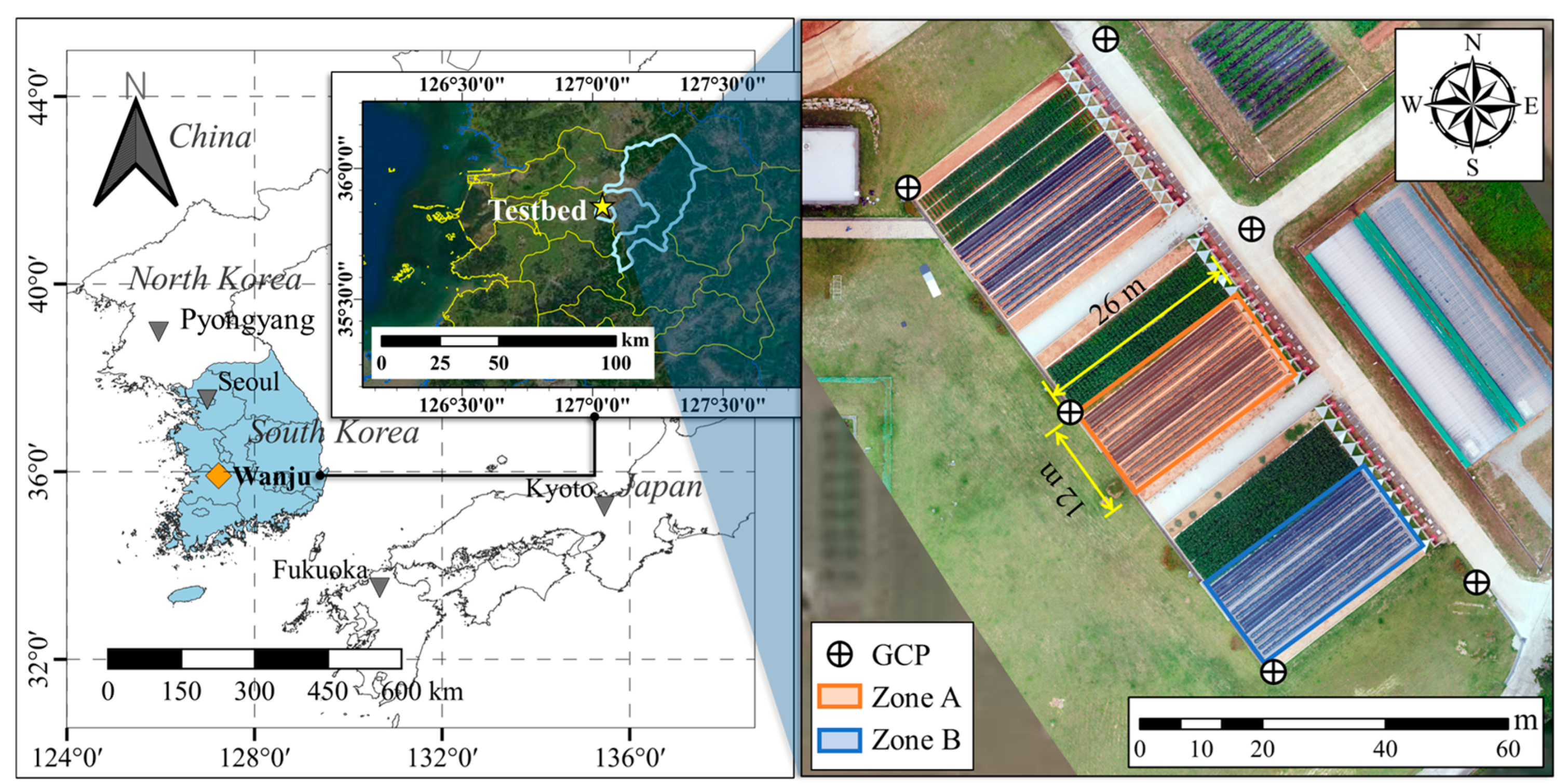
Figure 2.
Early prediction of Kimchi cabbage height using drone imagery and LSTM-based modeling: A five-stage workflow.
Figure 2.
Early prediction of Kimchi cabbage height using drone imagery and LSTM-based modeling: A five-stage workflow.
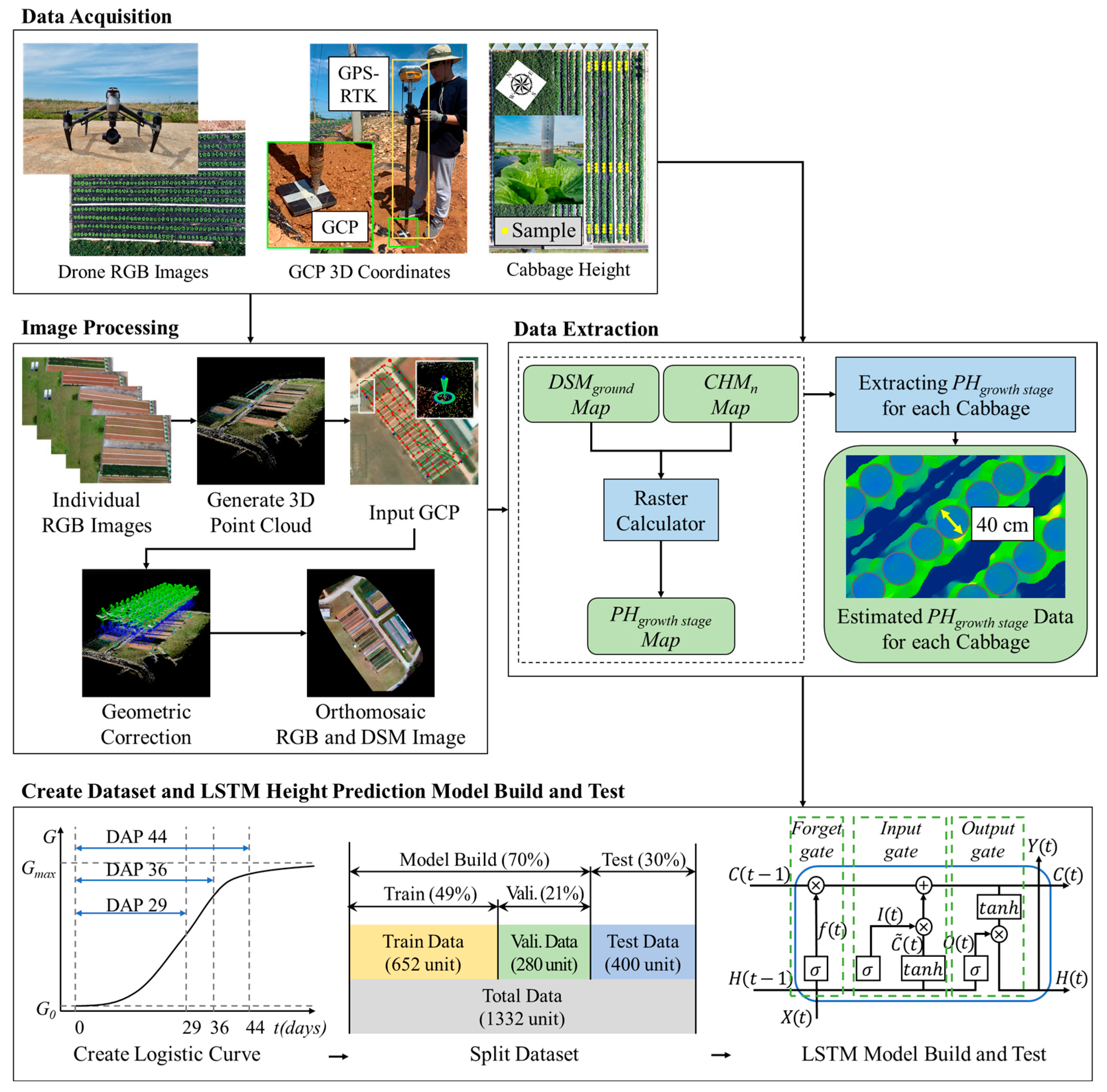
Figure 3.
Geometric correction of drone imagery using GCPs with their corresponding coordinates in the WGS 84 UTM zone 52 N system.
Figure 3.
Geometric correction of drone imagery using GCPs with their corresponding coordinates in the WGS 84 UTM zone 52 N system.
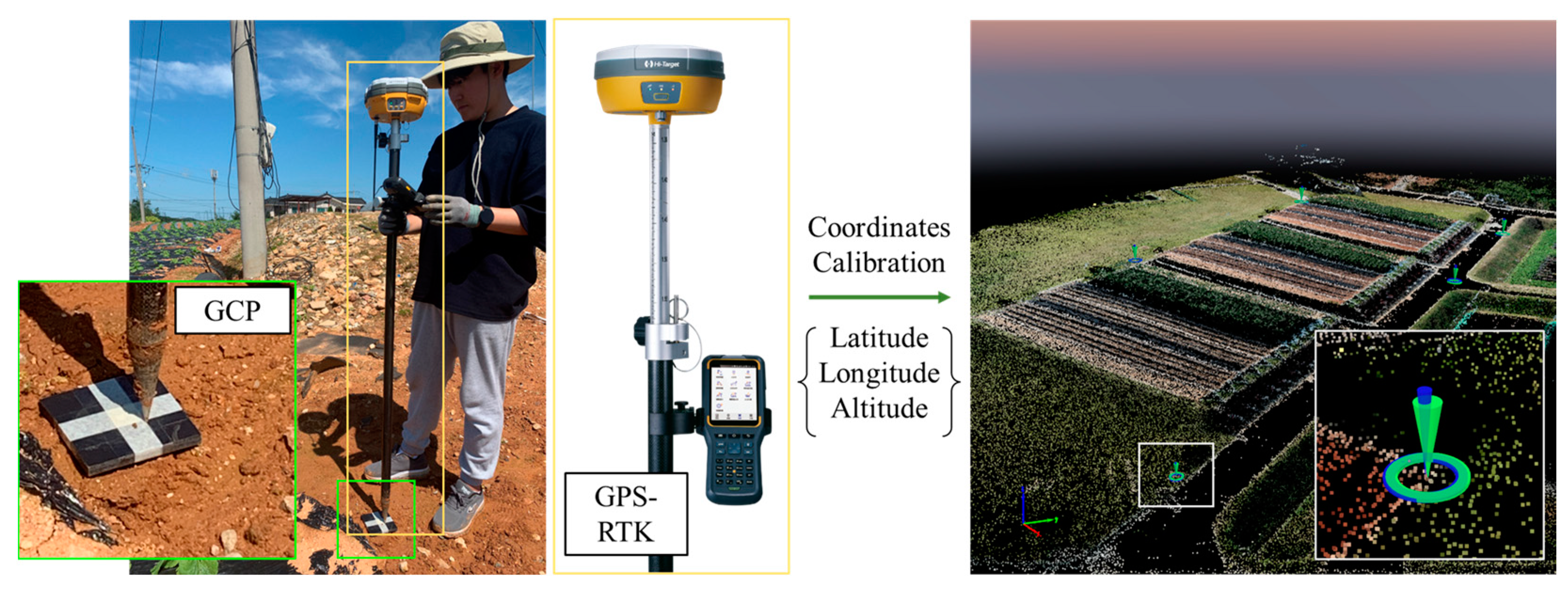
Figure 4.
Schematic of generating a canopy height model (CHM) by subtracting the digital surface model (DSM) of the bare ground (DSMground) from the DSM of the Kimchi cabbage field at a specific growth stage (DSMgrowth stage).
Figure 4.
Schematic of generating a canopy height model (CHM) by subtracting the digital surface model (DSM) of the bare ground (DSMground) from the DSM of the Kimchi cabbage field at a specific growth stage (DSMgrowth stage).
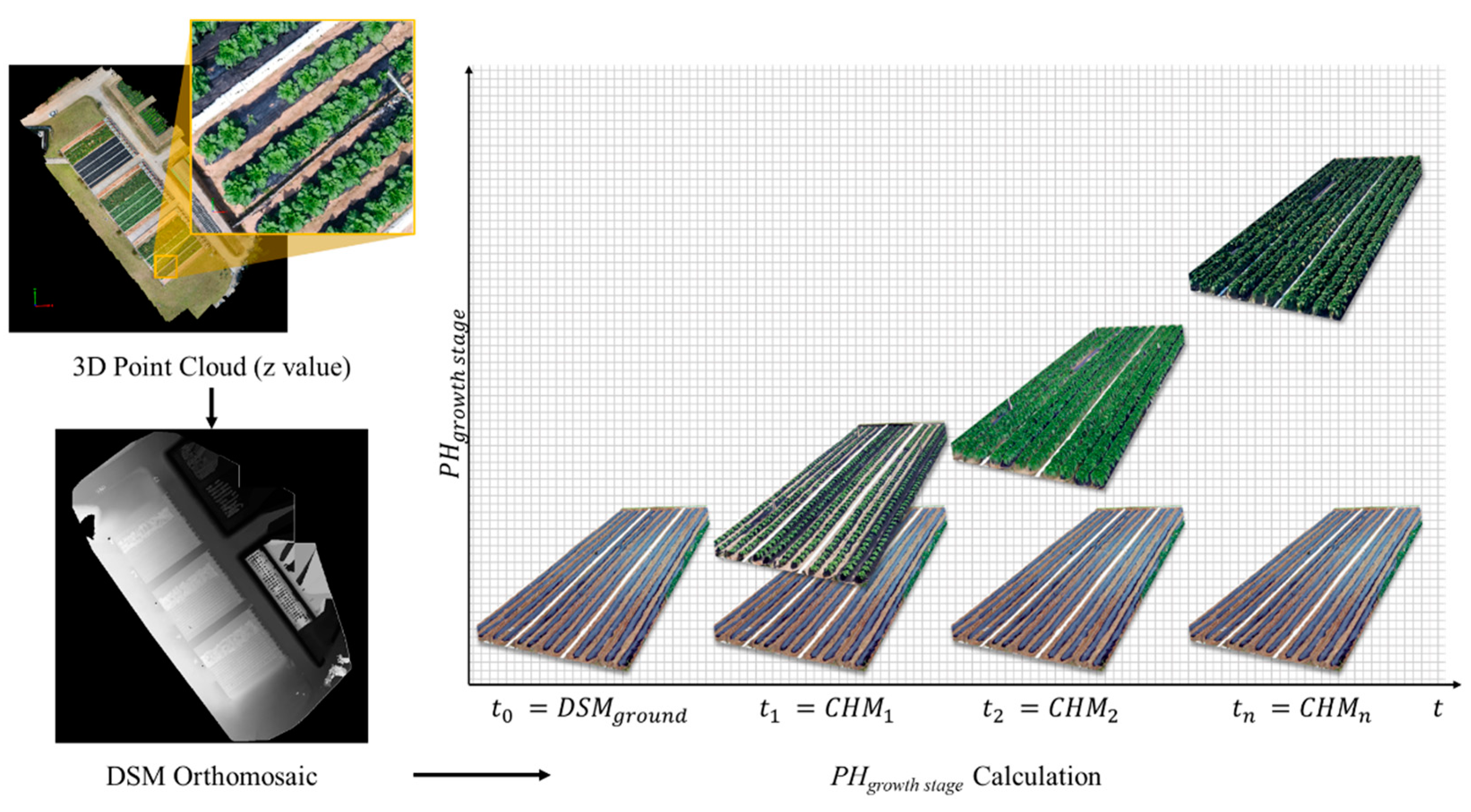
Figure 5.
(a) Logistic growth curves of Kimchi cabbages generated using height data at 29, 36, and 44 days after planting (DAP) and (b) data partitioning strategy for model training and testing.
Figure 5.
(a) Logistic growth curves of Kimchi cabbages generated using height data at 29, 36, and 44 days after planting (DAP) and (b) data partitioning strategy for model training and testing.
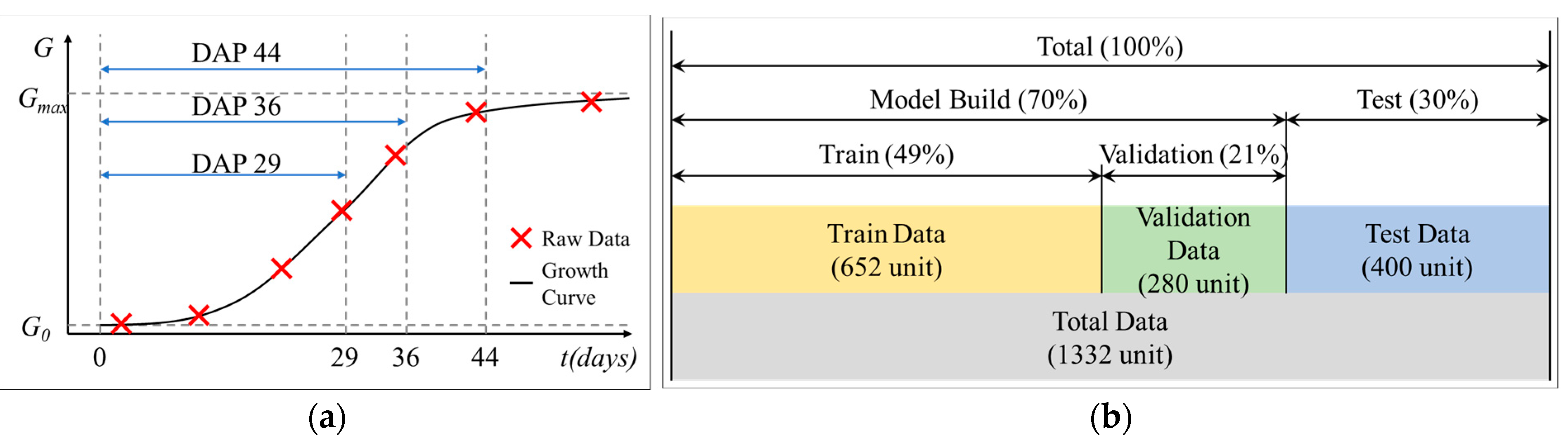
Figure 6.
Structure of the LSTM network model for Kimchi cabbage height prediction, showing the three gates (input, forget, and output) and the flow of information through the network. The input data is a three-dimensional matrix with dimensions representing Kimchi cabbages, time steps, and growth stage (PHgrowth stage).
Figure 6.
Structure of the LSTM network model for Kimchi cabbage height prediction, showing the three gates (input, forget, and output) and the flow of information through the network. The input data is a three-dimensional matrix with dimensions representing Kimchi cabbages, time steps, and growth stage (PHgrowth stage).
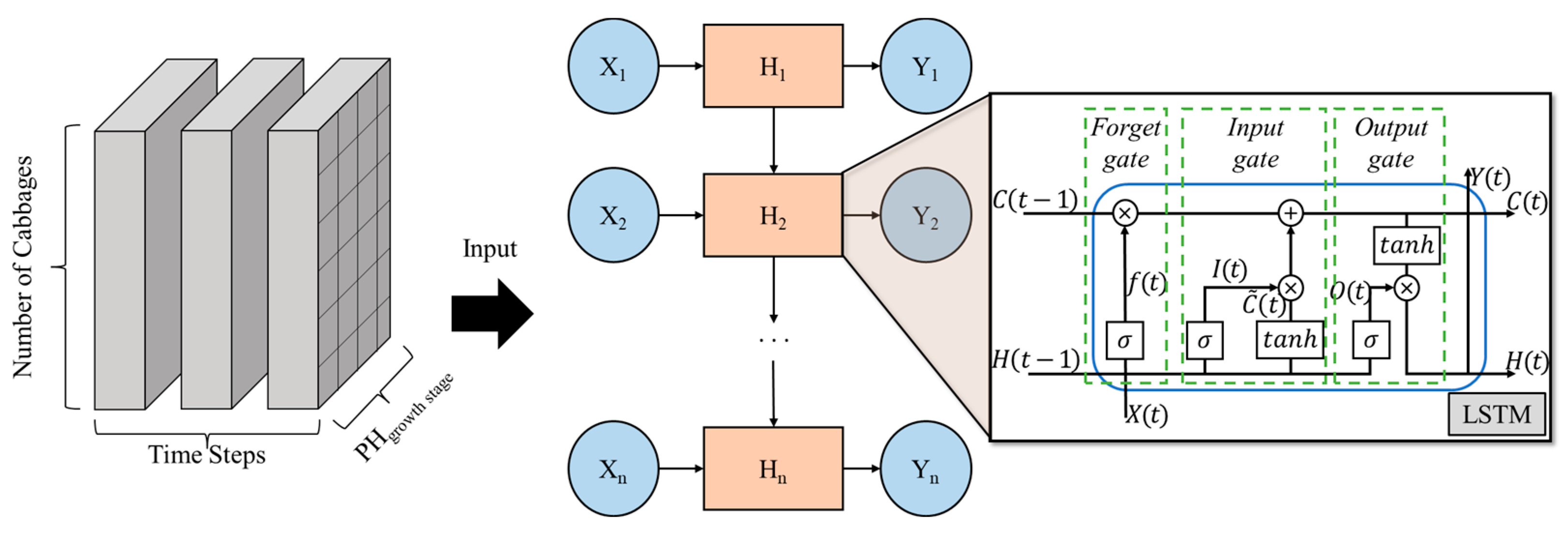
Figure 7.
Temporal changes in Kimchi cabbage growth visualized through (a) RGBorthomosaics, (b) canopy height models (CHMs), and (c) PHgrowth stage maps for three representative days after planting (DAP) 0, 36, and 71.
Figure 7.
Temporal changes in Kimchi cabbage growth visualized through (a) RGBorthomosaics, (b) canopy height models (CHMs), and (c) PHgrowth stage maps for three representative days after planting (DAP) 0, 36, and 71.
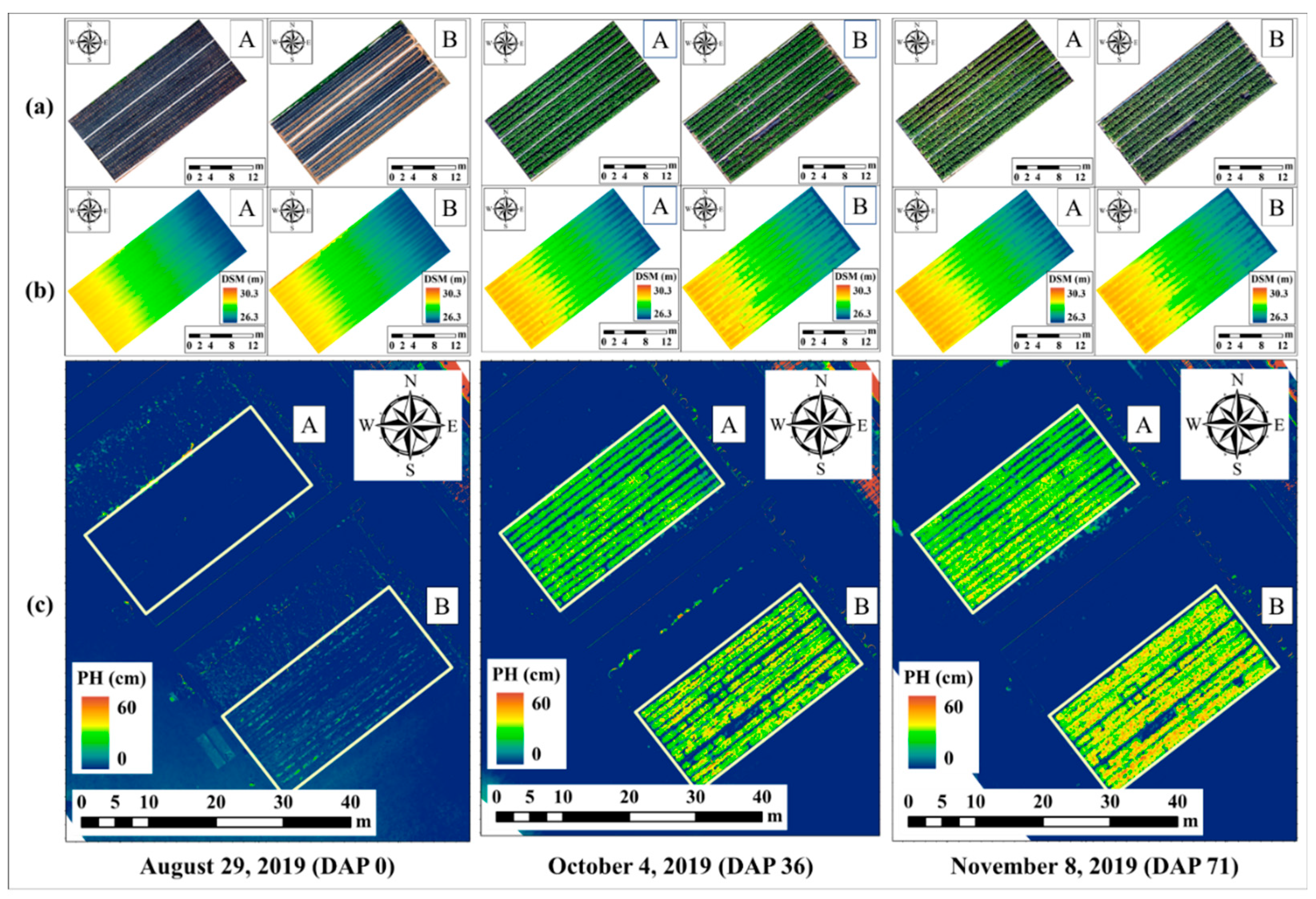
Figure 8.
Accuracy assessment of Kimchi cabbage height estimation from drone imagery: (a) boxplot of PHTrue values, (b) scatter plot of PHTrue vs. PHgrowth stage values, and (c) growth curve for Kimchi cabbages in Zones A and B.
Figure 8.
Accuracy assessment of Kimchi cabbage height estimation from drone imagery: (a) boxplot of PHTrue values, (b) scatter plot of PHTrue vs. PHgrowth stage values, and (c) growth curve for Kimchi cabbages in Zones A and B.
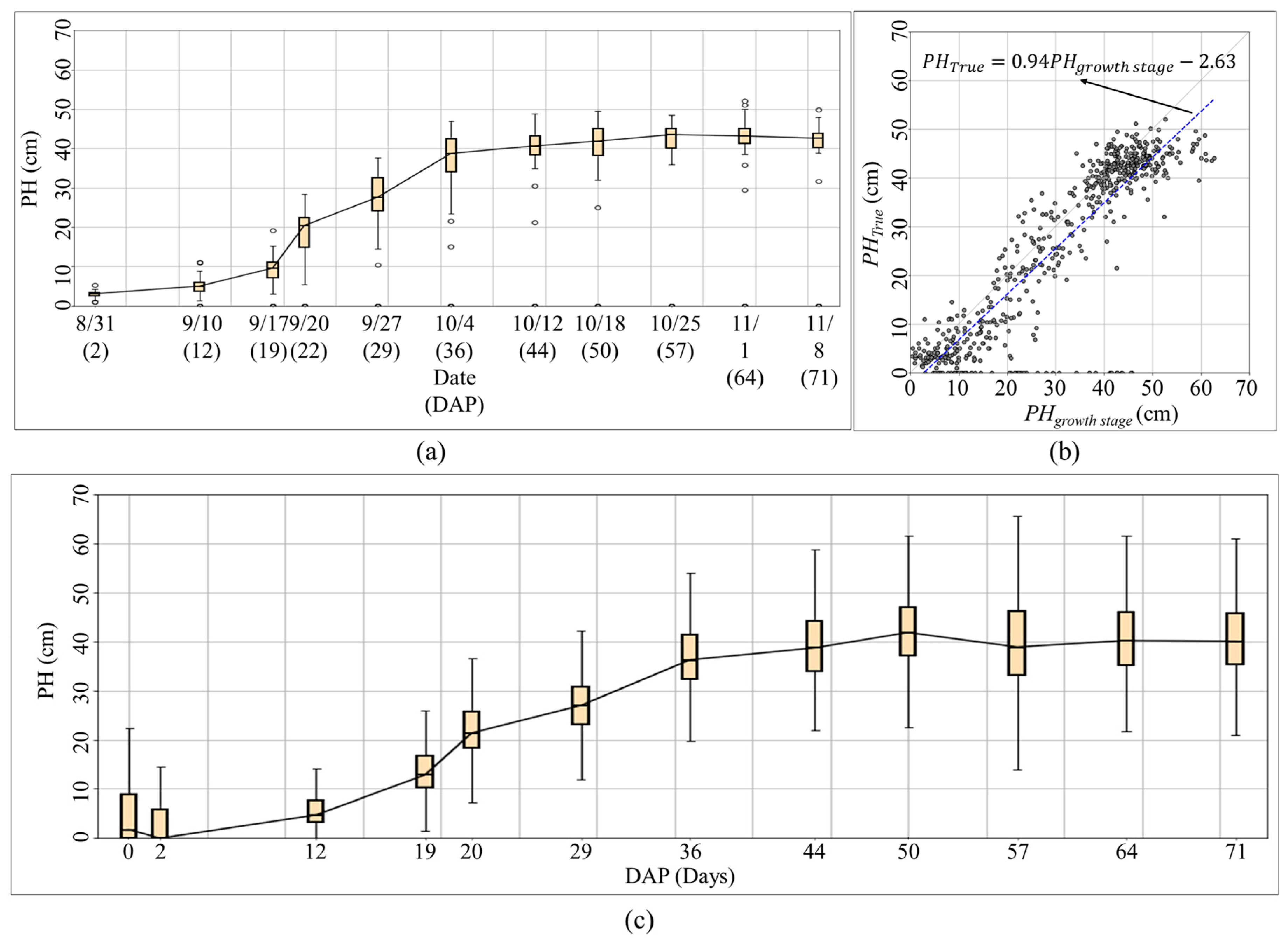
Figure 9.
Logistic growth curves of Kimchi cabbage height for different time points (DAP 29, 36, and 44) with boxplots illustrating daily variations in PHgrowth stage (estimated plant height from drone imagery).
Figure 9.
Logistic growth curves of Kimchi cabbage height for different time points (DAP 29, 36, and 44) with boxplots illustrating daily variations in PHgrowth stage (estimated plant height from drone imagery).
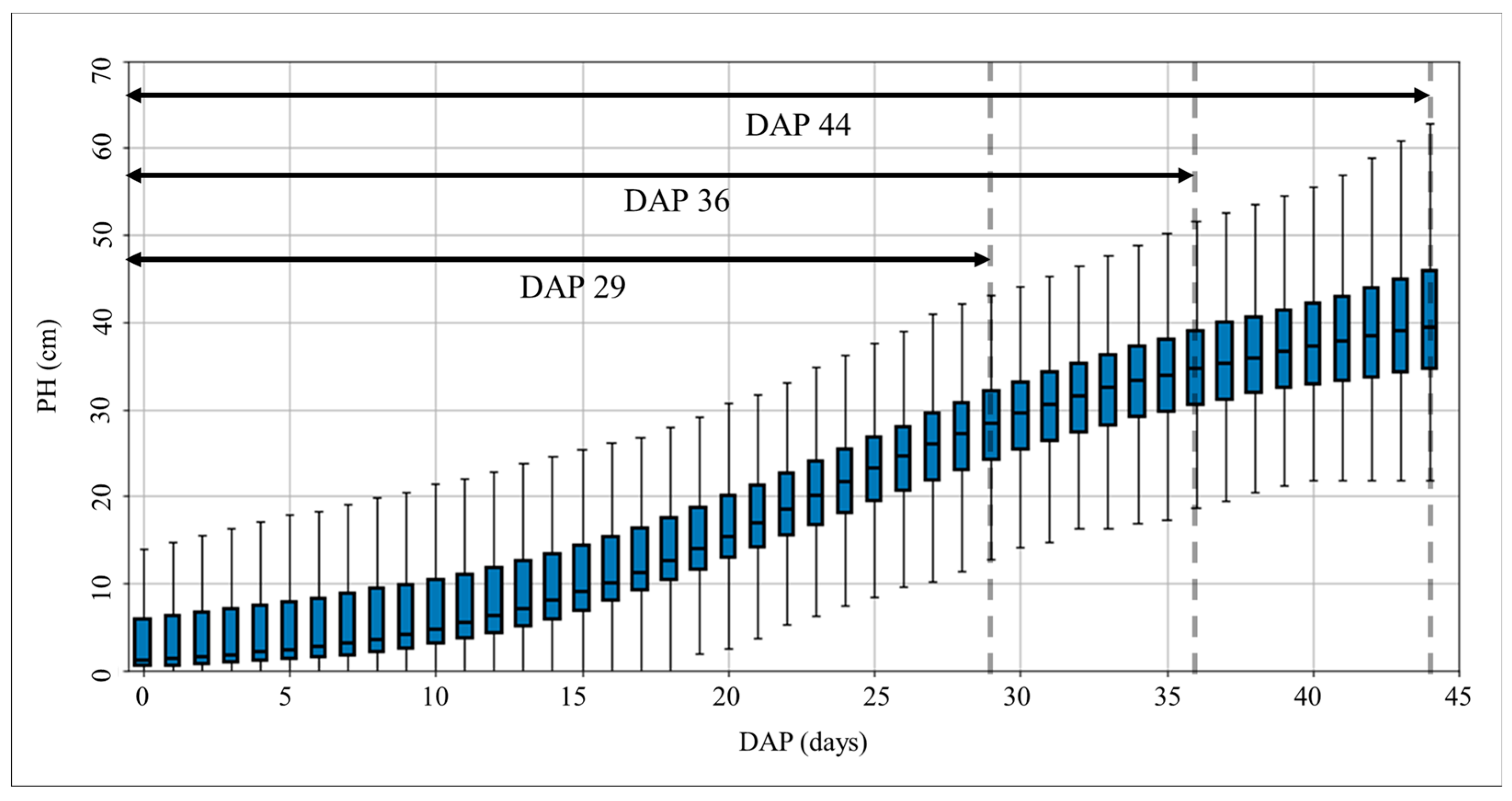
Figure 10.
Comparison of predicted Kimchi cabbage height (PHprediction) by the LSTM models at different training stages (a) DAP 29, (b) DAP 36, and (c) DAP 44, against the true height (PHTrue) for both Zone A (loam) and Zone B (sandy loam), including R², MAE, and RMSE values.
Figure 10.
Comparison of predicted Kimchi cabbage height (PHprediction) by the LSTM models at different training stages (a) DAP 29, (b) DAP 36, and (c) DAP 44, against the true height (PHTrue) for both Zone A (loam) and Zone B (sandy loam), including R², MAE, and RMSE values.
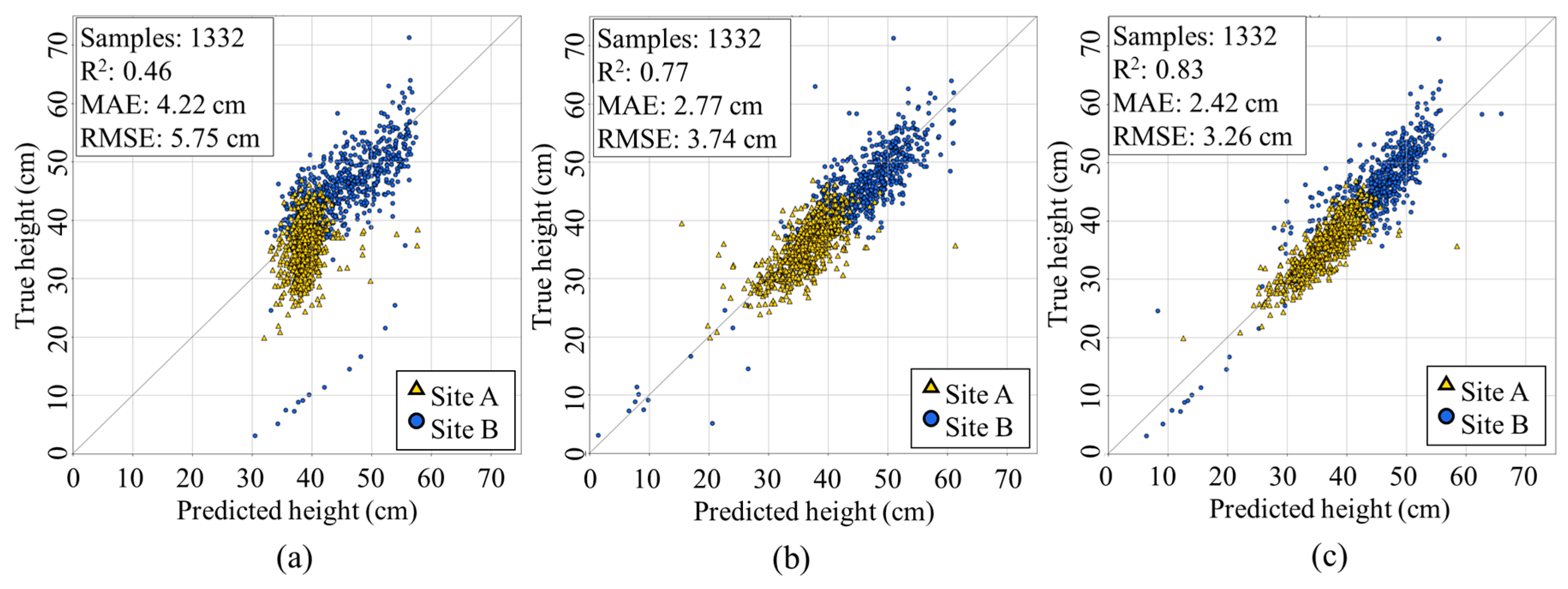
Figure 11.
Comparison of predicted Kimchi cabbage height maps generated using the LSTM model at different DAP (a) 29, (b) 36, and (c) 44, with the reference map (d) derived from the actual field measurements at harvest (DAP 71).
Figure 11.
Comparison of predicted Kimchi cabbage height maps generated using the LSTM model at different DAP (a) 29, (b) 36, and (c) 44, with the reference map (d) derived from the actual field measurements at harvest (DAP 71).
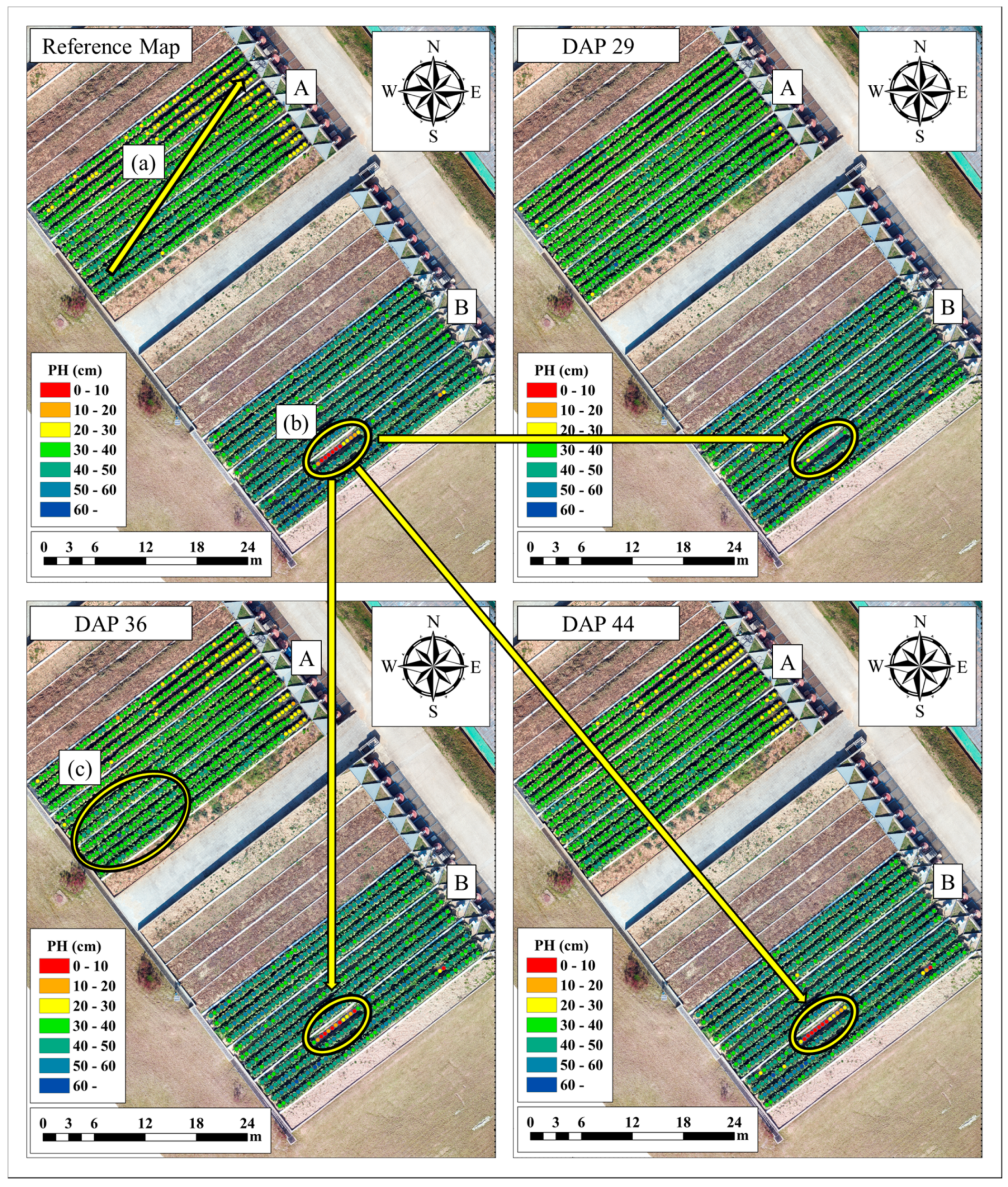

Table 1.
Specifications of the drone and sensor used for image acquisition.
| Material | Item | Specification |
|---|---|---|
| Inspire2 | Manufacturer | DJI, Shenzhen, China |
| Max take-off weight | 4,000g | |
| Max flight time | Approx. 27 min | |
| Zenmuse-X5S | Manufacturer | DJI, Shenzhen, China |
| Weight | 461g | |
| Sensor | CMOS, 4/3″, Effective pixels: 20.8MP | |
| FOV | 72° (with DJI MFT 15mm/1.7ASPH) | |
| Photo resolutions | 4:3, 5280×3956pixel 16:9, 5280×2970pixel |
Source: https://www.dji.com/kr/inspire-2/, https://www.dji.com/kr/zenmuse-x5s/.
Table 2.
Dates of drone image acquisition and field measurements of Kimchi cabbage height.
| Date | Days After Planting (DAP) | Drone imagery |
Field survey data | Planting vegetation |
|---|---|---|---|---|
| Aug. 28, 2019 | -1 | O | X | X |
| Aug. 29, 2019 | 0 | O | X | O |
| Aug. 31, 2019 | 2 | O | O | O |
| Sep. 10, 2019 | 12 | O | O | O |
| Sep. 17, 2019 | 19 | O | O | O |
| Sep. 20, 2019 | 22 | O | O | O |
| Sep. 27, 2019 | 29 | O | O | O |
| Oct. 4, 2019 | 36 | O | O | O |
| Oct. 12, 2019 | 44 | O | O | O |
| Oct. 18, 2019 | 50 | O | O | O |
| Oct. 25, 2019 | 57 | O | O | O |
| Nov. 1, 2019 | 64 | O | O | O |
| Nov. 8, 2019 | 71 | O | O | O |
Table 3.
Description of gates and activation functions in the LSTM model for Kimchi cabbage height prediction.
Table 3.
Description of gates and activation functions in the LSTM model for Kimchi cabbage height prediction.
| Layer | Equation | Parameter | |
|---|---|---|---|
| LSTMLayer | Forget gate | ||
| Input gate | |||
| Cell state | - | ||
| Output gate | |||
Table 4.
Mean absolute error (MAE) and root mean square error (RMSE) of Kimchi cabbage height estimation from drone imagery compared to field measurements (PHTrue) at different growth stages (DAP).
Table 4.
Mean absolute error (MAE) and root mean square error (RMSE) of Kimchi cabbage height estimation from drone imagery compared to field measurements (PHTrue) at different growth stages (DAP).
|
Date (DAP) |
08/31 (2) |
09/10 (12) |
09/17 (19) |
09/20 (22) |
09/27 (29) |
10/04 (36) |
| MAE (cm) | 4.58 | 3.98 | 6.29 | 4.25 | 4.53 | 5.10 |
| RMSE (cm) | 5.73 | 5.09 | 7.68 | 5.29 | 5.59 | 6.36 |
|
Date (DAP) |
10/12 (44) |
10/18 (50) |
10/25 (57) |
11/01 (64) |
11/08 (71) |
Total |
| MAE (cm) | 4.15 | 4.94 | 4.81 | 3.79 | 3.78 | 4.21 |
| RMSE (cm) | 5.75 | 6.51 | 6.22 | 5.29 | 5.42 | 5.52 |
Table 5.
Performance of LSTM models for Kimchi cabbage height prediction at harvest (DAP 71) using training data from different growth stages (DAP 29, 36, and 44).
Table 5.
Performance of LSTM models for Kimchi cabbage height prediction at harvest (DAP 71) using training data from different growth stages (DAP 29, 36, and 44).
| Index | DAP 29 | DAP 36 | DAP 44 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Vali.* | Test | Total | Vali. | Test | Total | Vali. | Test | Total | |
| R2 | 0.48 | 0.45 | 0.46 | 0.76 | 0.74 | 0.77 | 0.85 | 0.85 | 0.83 |
| MAE (cm) | 4.12 | 4.35 | 4.22 | 2.84 | 2.77 | 2.77 | 2.54 | 2.23 | 2.42 |
| RMSE (cm) | 5.74 | 5.75 | 5.75 | 3.88 | 3.83 | 3.74 | 3.31 | 2.92 | 3.26 |
*Vali.: Validation.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



