
Submitted:
24 July 2024
Posted:
24 July 2024
You are already at the latest version
Abstract
This study presents a comprehensive review of the development and progression of autonomous underwater vehicles (AUVs) in polar regions, aiming to synthesize past experiences and provide guidance for future advancements and applications. We extensively explore the history of notable polar AUV deployments worldwide, identifying and addressing the key technological challenges these vehicles face. These include advanced navigation techniques, strategic path planning, efficient obstacle avoidance, robust communication, stable energy supply, reliable launch and recovery, and thorough risk analysis. Furthermore, the study categorizes the typical capabilities and applications of AUVs in polar contexts, such as under-ice mapping and measurement, water sampling, ecological investigation, seafloor mapping, and surveillance networking. We also briefly highlight existing research gaps and potential future challenges in this evolving field.
Keywords:
polar AUVs
; technological challenges
; deployments and applications
; Arctic and Antarctic
1. Introduction
1.1. Concerns in Polar Ice Studies
Despite their critical importance in studying climate processes and changes, the polar oceans are among the planet’s most under-explored regions [1]. The areas beneath the Antarctic and Arctic’s ice shelves and sea ice are particularly difficult to access, yet they hold key insights into the interactions between ice formations and the ocean. These interactions, including the dynamics of freezing and melting, are of wider significance to the broader context of the earth’s environmental systems [2].
The seasonal growth and decline of sea ice, known as its mass balance, plays a critical role in climate dynamics due to its impact on ocean-atmosphere heat exchange, which is influenced by the ice’s thickness [3]. With the accelerating climate crisis, it becomes increasingly vital to understand the decay of sea ice. To fully grasp sea ice behavior, it requires more than just surface analysis; mapping its underside is essential to a complete understanding its formation and melting patterns.
Furthermore, the cavities under Antarctic ice shelves represent critical yet less-studied regions of the planet’s oceans, despite being crucial sites for significant global water mass transformations [4]. These ice shelf bases are key junctures between the ice sheets and the Southern Ocean, impacting deep ocean waters by cooling and freshening them [5], and shaping the Antarctic Ice Sheet’s seaward edge, which in turn affects the rate of inland ice discharge and global sea levels [6]. Thus, the dynamics beneath ice shelves are vital to the climate system and need to be integrated into global climate models to improve sea level rise predictions. Nonetheless, gaining insights into the oceanographic processes beneath ice shelves remains challenging due to the difficulty of accessing and measuring within these remote sub-ice areas.
Although the dynamic interactions between the polar ice and the surrounding ocean as well as their impacts on climate change have attracted most of the research interests, scientists also have interests in learning about the unique ecological processes beneath sea ice and ice shelves. Antarctic krill, a key species in the Southern Ocean ecosystem, relies on sea-ice algae as a food source during certain life stages [7]. Fluctuations in sea-ice coverage have been shown to significantly impact krill recruitment success and abundance, with declines observed after periods of reduced ice extent [8]. Historically, the under-ice habitat of krill has been recognized for its importance, yet direct observations and density estimations have been challenging due to sampling difficulties [9].
Moreover, concerns over ice thinning, the impact of Arctic shipping on Inuit communities and the environment, the commercial potential for resource extraction in Arctic regions, emerging shipping corridors, and increasing sovereignty issues in polar areas have accelerated the development of under-ice exploration approaches for data gathering. For example, the demand for specialized ice regime surveys, particularly in the context of oil and gas extraction, highlights the complexities of ice interactions with offshore infrastructure, such as ice rubble pile-up, seabed scouring by ice ridges, and oil entrapment by ice [10]. Moreover, advanced technological solutions are essential for conducting under-ice bathymetric surveys, a requirement for polar nations asserting their Outer Continental Shelf claims under the United Nations Convention on the Law of the Sea (UNCLOS) [11]. These claims rely on intricate criteria, including water depth, seafloor geology, sediment thickness, and proximity to the coastline. Furthermore, the study of sea ice topography serves various critical roles, from evaluating containment potential for oil spills to influencing icebreaker design and affecting under-ice acoustic propagation [12].
In recent developments, China’s Polar Silk Road initiative, part of the larger Belt and Road Initiative (BRI), aims at establishing maritime routes and infrastructure in the Arctic, focusing on shipping routes development, sustainable resource utilization, and environmental conservation amidst climate change concerns [13]. Additionally, a pioneering partnership between Memorial University and the Inuit Circumpolar Council (ICC) in Canada, the Qanittaq Clean Arctic Shipping Initiative, seeks to align Inuit shipping priorities with the safety of Arctic maritime operations and environmental protection [14].
1.2. Progress of Under-Ice Observation
All the above-mentioned concerns in polar ice studies are eager to access and know what is happening to the sea ices or shelves, as well as the environment surrounded. However, observation of ice conditions and the oceanographic processes beneath face significant technological difficulties. Early Arctic ice thickness measurements, based on sparse drilling during the Fram expedition (1893-96), indicated an average thickness of 5m. Subsequent Russian “North Pole” stations from 1937 provided more drill hole data, yet these results were statistically limited and lacked details on ice bottom topography, ridge depth distribution, and roughness variations between ridged and level ice, as well as differences between first-year and multi-year ice. These factors are crucial for a comprehensive understanding of sea ice and its impact on the climate [3,15,16].
Driven by scientific concerns, the observation of the under-ice surface advanced from point measurements to profile mapping, benefitting from the applications of a series of upward mapping sonars that were firstly carried by military submarines. The pioneering achievement of capturing the first successful linear profile of ice underside came in 1958 with the USS Nautilus’ Arctic Ocean transit. Utilizing narrow-beam upward-looking sonar, this mission provided groundbreaking insights into the roughness of ice bottoms and the characteristics of ridge features [17]. The evolution of sonar technology for under-ice mapping has significantly advanced in stages. Initially, single-beam upward sonar provided linear profiles. This was followed by sidescan sonar, which uses a fan-shaped beam to create maps displaying bright echoes and shadow zones along a vessel’s track [18]. The most advanced development is multibeam sonar, which is capable of generating detailed 3D swath images of ice bottoms by calculating the echo time of flight [19]. The measurements collected by submarine-equipped sonars can compile detailed quantitative maps of ice surface topography, establishing a foundational understanding of sea ice thickness distributions.
Despite the success of submarines in providing basin-wide ice thickness data, there’s a recognized need for local ice thickness information and data on surrounding ocean dynamics to support studies in sea ice dynamics and thermodynamics [20,21,22]. Owing to operational limitations and safety concerns, unmanned platforms are required for intensive sea ice mapping over small areas for high resolution measurements, instead of large military submarines. Emerging technologies like unmanned vehicles offer a safe and effective means to explore the inaccessible and harsh regions of the global ocean and cryosphere. Autonomous underwater vehicles (AUVs) with extensive range capabilities enable broad-scale missions under ice [23]. Consequently, polar AUVs are increasingly favored for mapping sea ice undersides, delivering high-resolution 3D topographic views and uncovering vital dynamic processes occurring beneath sea ice and ice shelves [24].
Operating an AUV under ice entails numerous challenges, including reliable communication, accurate localization and navigation, strategic sampling, effective obstacle avoidance, onboard power management, and emergency response capabilities. Despite these hurdles, AUVs have been extensively developed and deployed in various polar missions since the 1970s, thanks to their indispensable role in under-ice exploration. This paper reviews both the challenges and advancements of AUVs deployed in polar regions, in order to offer concise yet comprehensive guidance for the future development and application of polar AUVs.
The remainder of this paper is structured as follows: Section 2 delves into the developmental history of polar AUVs, tracing their evolution over time. Section 3 addresses the major technological challenges faced by polar AUVs, analyzing their impact on operations. Section 4 summarizes the progress of AUV applications across a spectrum of polar missions, highlighting key achievements. Section 5 briefly discusses current research trends and future prospects of polar AUVs, offering insights into emerging directions. Finally, Section 6 provides a comprehensive conclusion to the paper, encapsulating the main findings and observations.
2. History of Polar AUV Deployments
In this section, we review the history of polar AUV deployments, drawing on significant past review work in [3,25]. Our review work focuses on summarizing representative studies and achievements. The overall structure of our review adopts a chronological approach, with a specific emphasis on grouping and presenting the missions of similar AUVs in a consolidated manner.
2.1. Sporadic Developments in Early Years (1970s-2000s)
The first AUV surveys beneath ice took place in the Beaufort Sea in 1972, utilizing the Unmanned Arctic Research Submersible (UARS) developed by the Applied Physics Laboratory (APL) at the University of Washington [26]. UARS, equipped with three narrow-beam upward-looking sonars, delivered unprecedented and directly correlated underwater ice topography measurements, offering the most comprehensive insights into underwater ice surface topography at that time [27,28].
After a 20-year interval following the UARS deployment, the Arctic saw the introduction of the Autonomous Conductivity Temperature Vehicle (ACTV), also developed by APL. This AUV, equipped with a high-grade CTD sensor, was designed for refined measurements of water profile within its two-hour mission limit. It was deployed in the Beaufort Sea during the winter Lead Experiment (LeadEx) in 1992 [30], and in the eastern Weddell Sea for the Antarctic Zone Flux Experiment in 1994 [31]. Subsequently, a more sophisticated variant, the Autonomous Microconductivity Temperature Vehicle (AMTV), based on the REMUS AUV by the Woods Hole Oceanographic Institution (WHOI), was used in the Surface Heat Balance of the Arctic Ocean (SHEBA) program in 1998 in the Beaufort Sea to study turbulent vertical velocity and heat and salt fluxes in the upper ocean [32].
The Odyssey II AUV, developed by the AUV Laboratory at the Massachusetts Institute of Technology, was deployed in the spring of 1994 to gather data on the topography of the underside of the ice in the Beaufort Sea. This deployment aimed to enhance our understanding of Arctic sea-ice mechanics [33]. All AUV operations took place inside a 15 ft by 15 ft tent, which enclosed a hydrohole cutting through five feet of ice. This groundbreaking approach laid the foundation for a novel capability to examine transient phenomena within the ice environment [34].
In 1996, the International Submarine Engineering Ltd. Company (ISE) in collaboration with the Canadian Defence Research Establishment Atlantic (DREA) developed a huge AUV named Theseus [35]; see Figure 1. Its primary mission was to lay an optical fiber cable stretching up to 220 km from a location near the shore of Ellesmere Island in the Canadian Arctic islands to a scientific acoustic array in the ice-covered Arctic Ocean [36]. While the primary focus of this deployment was on demonstrating operational and logistical capabilities, rather than scientific data collection, it highlighted the significant potential of large AUVs for extensive under-ice exploration over long ranges.
The Monterey Bay Aquarium Research Institute (MBARI) has led the development of an AUV specifically designed for operations in the Arctic. A key mission for the vehicle involves collecting data on the warm Atlantic Layer water mass flowing into the Arctic Ocean via Fram Strait, as a component of the Atlantic Layer Tracking Experiment (ALTEX) [38,39]. This AUV, an adaptation of the renowned Dorado AUV and referred to as the ALTEX AUV during the mission, was engineered for extended unattended operations; see Figure 5. It featured a unique data relay system where parts of the collected data were intermittently stored on internal buoys. These buoys were designed to be released and burn through the ice cover, and transmit the data back to shore. For its Arctic operations, the ALTEX AUV was outfitted with an ice profiling sonar, which was successfully used to measure ice draft during a test cruise from Tromso, Norway to the Arctic Circle in 2001 [40].
2.2. Continued Series AUV Deployments (2000s-2020s)
Following these sporadic yet groundbreaking efforts, UK researchers initiated a systematic and continuous research program focused on AUV operations under ice. Their work demonstrates the effectiveness of combining various onboard sensors, allowing the AUV to gather detailed information about sea ice and seabed topography, water structure and ocean dynamics. Operating in an exploratory mode, the AUV successfully navigated regions rarely visited due to challenging year-round ice conditions [41]. This initiative marked a significant advancement in the field of polar AUV exploration.
After the “Autosub Science Missions” with Autosub 1 AUV, the National Oceanography Centre (NOC) in the UK developed an enhanced version, Autosub 2, for the ambitious “Autosub Under Ice” program, supported by the UK’s Natural Environment Research Council (NERC). This program focused on deployments around Antarctic and Greenland ice shelves, navigating increasingly challenging ice-covered environments [42]. In February 2001, the Autosub 2 AUV was deployed in the marginal ice zone of the northern Weddell Sea. Targeted goals included measuring Antarctic sea ice thickness over tens of kilometers using single-beam upward looking sonar, surveying beneath different types of icebergs, assessing the abundance of Antarctic krill under sea ice versus open water, and measuring downwelling irradiance beneath the ice [9,43]. The Autosub series AUVs are shown in Figure 2.
The Polar Ocean Physics Group at the University of Cambridge has consistently made remarkable contributions to observing the underside of sea ice using AUVs. Their significant work began with the Maridan MARTIN 150 AUV as part of the EU CONVECTION program in February 2002, aimed at studying Greenland Sea convection [45]. Apart from a CTD and an ADCP, the vehicle was also equipped with a sidescan sonar and captured the first 2D imagery of multi-year ice off the coast of East Greenland. In 2004, the same team advanced to 3D ice underside mapping with multibeam sonar using the Autosub 2 AUV off NE Greenland, achieving groundbreaking swath sonar measurements that detailed the three-dimensional structure of the under-ice surface; the effort also included systematic measurements of the water beneath the ice. This was the first example of the comprehensive nature and versatility possible with AUVs as platforms for extensive scientific measurements under-ice [41].
In February 2005, the Autosub 2 AUV was deployed to collect multibeam sonar data under the Fimbul ice shelf in the Antarctic as part of the Autosub Under Ice Program. The AUV revealed a complex oceanographic environment, including an ice base characterized by significant roughness variability, and areas within the cavity periodically encountering water temperatures well above the freezing point of the surface [4]. Unfortunately, the Autosub 2 AUV was lost on its next mission under the same ice shelf, leading to a comprehensive and transparent investigation, leading to increased focus on enhancing AUV reliability for polar operations [46,47].
With the continuous support from the NERC’s Autosub Under Ice Program, the Autosub 3 AUV was developed and deployed under Pine Island Glacier (PIG) in West Antarctica in 2009. Data from this mission indicated that the glacier had previously been anchored on a transverse ridge on the sea floor. Subsequent retreat allowed warmer water to flow beneath the glacier, causing rapid melting of the thick ice on the newly exposed upstream half of the ice shelf. This finding is crucial to understanding the potential for rapid ice-sheet collapse due to climate change, highlighting the importance of the glacier’s retreat dynamics [48]. The AUV executed six missions, covering a total of 510 km under the PIG during this campaign. In 2014, as part of the UK’s Ice Sheet Stability Programme (iSTAR), Autosub 3 revisited Pine Island Glacier, mapping another 460 km beneath the ice shelf. These missions provided critical data on velocity, temperature, salinity, turbulent kinetic energy dissipation rate, and thermal variance dissipation rate under the shelf. Notably, the highest turbulent kinetic energy dissipation rate was recorded near the grounding line; and the observations of mixing and dissipation rates bolstered confidence in prior basal melting rate estimates [49].
After a decade of operation, Autosub3 was retired in 2017. Subsequent under-ice missions were undertaken by the Autosub Long Range (ALR) AUV, affectionately known as ‘Boaty McBoatface,’ developed by the NOC. In January 2018, the ALR took on a challenging mission beneath the Filchner-Ronne Ice Shelf (FRIS), the world’s largest ice shelf by volume and a critical regulator of Antarctica’s impact on global sea level rise. The ALR successfully navigated under the ice shelf for over three days, covering more than 25 km in regions where the ice exceeded 500 m in thickness. The scientific goals were to quantify and elucidate the driving factors behind the flow of waters, especially warmer currents that induce melting, beneath the ice shelves. It also sought to directly measure the morphology of the ice shelf and the seabed, enhancing our understanding of these critical dynamics [50,51].
In order to explore the influences of atmospheric and oceanic processes on the behavior of the Thwaites and Dotson Ice Shelves, the International Thwaites Glacier Collaboration (ITGC) initiated the TARSAN (Thwaites-Amundsen Regional Survey and Network Integrating Atmosphere-Ice-Ocean Processes) project [52]. As an early component of the TARSAN project, the University of Gothenburg’s Kongsberg Hugin AUV Ran was deployed beneath the Thwaites Glacier in 2019, undertaking short excursions within 10km. During its mission, Ran was outfitted with an array of oceanographic sensors alongside comprehensive geophysical instruments. It provided unprecedented direct measurements of ocean temperature, salinity, and oxygen levels beneath the Thwaites Ice Shelf, delineating the pathways and modification of warm water circulating under the ice shelf [53]. Additionally, Ran captured detailed (sub-meter scale) multibeam bathymetry and sidescan sonar imagery. This data chronicled the seabed’s history of the glacier’s retreat past a seabed ridge, unveiling patterns of sedimentary ridges created by daily tidal movements at the grounding line when the Thwaites Glacier extended further than its current position [54]. Ran AUV deployed around the Thwaites Glacier is presented in Figure 3.
In the summer of 2021-2022, the NOC contributed its ALR AUV to the Thwaites Glacier expedition, part of the TARSAN project. The ALR AUV’s mission was to investigate the factors driving ice loss from the glacier and to enhance predictions about its contribution to sea level rise. Challenged by the unusually thick and dense sea ice around Thwaites, the expedition redirected its focus to the neighboring Dotson Ice Shelf. In this adjusted mission, the ALR AUV traversed more than 40 km beneath the ice shelf, capturing data on currents, turbulence, and water properties. In a collaborative effort, the Seagliders from the University of East Anglia profiled the open water areas to the north; meanwhile, the Hugin Ran AUV from the University of Gothenburg mapped the ice’s underside with multibeam sonar and collected water samples [56].
Unfortunately, Ran was lost in early February 2024 during its expedition to the Thwaites Glacier aboard the South Korean icebreaker RV/IB Araon [57]. This occurred after it had completed several successful dives beneath Thwaites. During its explorations under the ice, ranging from 200 to 500 m thick, Ran operated without continuous communication with the research vessel. Its pathways were set in advance, with a sophisticated navigation system enabling autonomous return to open water. Given the uncharted nature of ice shelf cavities, missions were incrementally planned, starting from the ice front, progressively collecting data to survey the underside of the ice. On its final mission, Ran failed to re-surface at the planned rendezvous point, and subsequent search efforts using acoustic instrumentation, helicopter, and drones were fruitless. It is very likely that Ran is now irretrievably situated beneath the Dotson Ice Shelf, the target of its last mission. During the cruise, the vehicle had been engaged in 20-hour missions at two critical sites, undertaking combined seafloor mapping, and mid-water column profiling and sampling tasks. Throughout its operational life, Ran performed prolonged under-ice missions, achieving success in diverse locales including Antarctica, Greenland, New Zealand, and beyond.
Over the past 20 years, WHOI’s SeaBED class twin-hulled AUVs have conducted a series of research expeditions in polar regions, including missions focused on biological and geological mapping, alongside sea ice studies, in both the Arctic and Antarctic environments [1]. A highlight was the utilization of SeaBED Jaguar and Puma AUVs for comprehensive surveys of the water column and ocean floor during the Arctic Gakkel Vents Expedition (AGAVE) to explore the Gakkel Ridge in the Arctic Ocean in the summer of 2007. This pioneering mission, aimed at discovering hydrothermal vents, was notable for being the first to successfully deploy and recover AUVs through ice into the deep ocean (depths exceeding 3,500 m) [58].
Furthermore, the SeaBED class AUVs, equipped with swath multibeam sonar, in conjunction with ice stations and Unmanned Aerial Systems (UAS) fitted with terrestrial laser scanners and automated snow probes, enabled the first-ever coincident high-resolution 3D mapping of both upper and lower surfaces of Antarctic sea ice. This was achieved during two significant expeditions: the UK-led Ice Mass Balance in the Bellingshausen Sea (ICEBell) voyage, which explored the Weddell and Bellingshausen Seas in November 2010, and the Australian-led Sea Ice Physics and Ecosystem Experiment II (SIPEX II), which journeyed to East Antarctica from September to November 2012 [20,59]. These missions resulted in ten floe-scale sea-ice draft maps collected in three different coastal regions around Antarctica, revealing extensive deformation and a mean sea ice draft significantly greater than typically observed in drilling data. These maps provide invaluable insights into the structural complexities of sea ice in these regions [60,61]. SeaBED class AUVs Puma and Jaguar are shown in Figure 4.
The Alfred Wegener Institute for Polar and Marine Research (AWI), Germany, customized and deployed a 21-inch class AUV named PAUL, manufactured by Bluefin Robotics, US. The primary goals of AWI’s AUV project were to investigate biogeochemical processes in surface waters, study the stratification of the upper water column in the marginal ice zone, and examine the dynamic interactions between ice and the ocean [63]. Since 2008, PAUL has been outfitted with an array of biogeochemical sensors, including those for Nitrate, Oxygen, and Fluorescence, along with a water sampler designed specifically for operations in icy waters. In the 2013 Arctic campaign, PAUL was deployed on the fringe of a vast ice tongue in the Fram Strait, focusing on high-resolution investigation of physical processes along the ice tongue’s meltwater front and understanding the ecological response to these conditions [64].
In March and April 2010, an ISE Explorer AUV, commissioned by Natural Resources Canada (NRCan), undertook a significant mission in Canada’s high Arctic [65]. The primary objective was to conduct under-ice bathymetric surveys, supporting Canada’s claim for the extension of its continental shelf boundaries under the United Nations Convention on the Law of the Sea (UNCLOS). Across all missions, the AUV autonomously navigated back to the Remote Camp, where it was secured using a small remotely operated vehicle (ROV). Remarkably, the AUV was recharged and its survey data downloaded directly through a 1.3 m by 2 m hole in the ice, without being removed from the water. It operated beneath the ice for 10 days prior to successful retrieval. Throughout the course of three missions, roughly 1000 km of under-ice survey was completed [11].
The University of Tasmania, Australia, utilized an ISE Explorer class AUV, known as nupiri muka, to gather data from beneath sea ice and ice shelves. This effort, undertaken as part of the Antarctic Gateway Partnership (AGP), aimed to elucidate the complex interactions between the oceans and Antarctic ice shelves [66,67]. In 2019, the vehicle was deployed to explore the Sørsdal ice shelf in East Antarctica; see Figure 5. The data collected by the vehicle revealed the presence of cold, salty water under the ice shelf and a deep seafloor trough at the shelf’s entrance [68]. In its second Antarctic summer, in February 2020, the nupiri muka AUV launched from the Korean research icebreaker Araon, successfully completed six missions in West Antarctica. This included a significant 60 km round trip along the seabed beneath a sea-ice barrier adjacent to the Thwaites Glacier, a major contributor to Antarctic mass loss and sea level rise. During these missions, the AUV not only conducted detailed mappings of the warm water inflow, but also successfully collected 46 trace-metal free water samples [69].
To facilitate AUV launch and recovery, small AUVs have been preferred in certain polar missions, which can be deployed from ice holes or boats near sea ice edges. These compact AUVs, typically 2-3 m long and weighing 50-80 kg in air, are ideal for mapping smaller areas of ice, approximately 2-4 km². The Gavia AUV, for instance, was deployed respectively in the Beaufort Sea in 2007 and the Lincoln Sea in 2008, successfully capturing under-ice images with a multi-beam sonar [70,71]. One such mission was a component of the Sea Ice Experiment: Dynamic Nature of the Arctic (SEDNA), which involved multiple deployments in the Beaufort Sea in 2007 [72]. During the missions, the vehicle operated at various depths to avoid collision with ice ridges: 50 m depth in areas with multi-year ice, 30 m with first-year ice, and 20 m in melt regions.
Since these initial deployments, the Gavia AUV has been frequently utilized in Arctic Ocean marginal seas experiments, notably in 2011, 2014, and 2017 [73]. In 2011, the UBC-Gavia AUV was equipped with an advanced set of 3D digital terrain mapping sonar systems, to map sections of the sidewalls and underside of Petermann Ice Island (PII) fragments in Lancaster Sound and Baffin Bay [74]. The AUV successfully mapped an area approximately 700 m × 500 m beneath PII. Coupled with a surface vessel’s sidewall survey, this facilitated the generation of a 3D terrain map of the underwater portion of the ice island. The mapping data acquired could provide the baseline to understand the drift, melt, and deterioration processes of ice islands.
Similarly, in January 2010, a REMUS-100 AUV equipped with a bathyphotometer was deployed in the high Arctic Kongsfjord, Svalbard, Norway during the polar night to study the bioluminescence among zooplankton. The observations were collected to measure the concentration and intensity of bioluminescent flashes by time of day and depth, providing insights into the behavior and distribution of bioluminescent organisms in polar darkness [75]. Following this, in March 2010, a modified REMUS-100 AUV specifically for under-ice operations, was deployed beneath coastal sea ice off Barrow, Alaska. The mission focused on acquiring cross-shore hydrographic transects to assess the winter transport of dense, salty water from the Chukchi Sea to the Arctic Ocean, contributing to our understanding of Arctic hydrodynamics [76]. Additionally, in January 2014, as part of the “Underwater robotics in the Arctic polar night” course at the University Centre in Svalbard, a field campaign took place in Ny-Alesund, Svalbard, Norway. During this campaign, a REMUS AUV was utilized for seafloor mapping and the measurement of oceanographic variation in spatial and temporal dimensions, enhancing educational and research experiences in underwater robotics and Arctic oceanography [77].
2.3. Other Deployments in Recent Years
Icefin, a custom-designed ROV/AUV developed by Georgia Institute of Technology, is tailored for sub-ice applications in Antarctica. Its design prioritizes portability for remote field deployments and modularity to support diverse payloads for under-ice environmental characterization [78]. Icefin was integral to the multidisciplinary MELT project (“Melting at Thwaites grounding zone and its control on sea level”) under the ITGC. The project focused on investigating rapid changes at the Thwaites Glacier’s grounding zone, especially basal melting.
In January 2020, Icefin made history as the first vehicle to explore the grounding line of the Thwaites Glacier. During its 15 km round-trip mission, this hybrid ROV/AUV gathered crucial environmental data, along with sonar and optical imagery. The mission unveiled a variety of basal conditions and complex geometries ranging from fine sediments to boulders, as well as diverse animal communities residing on the seafloor and under the ice [79]. The deployments of Icefin represented a significant advancement in our understanding of one of the most critical and rapidly changing areas in the Antarctic [80,81].
With the cooperation of more than 10 companies in Japan, the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) led the development of a small AUV prototype, called the Retrievable Arctic Icy edge observation Vehicle (RAIV), for Arctic environmental change research; see Figure 6. JAMSTEC started the prototype development in October 2015 with the goal of conducting test observations under the three themes: round-trip self-navigation (no positioning), acquisition of measurements (salinity, temperature, depth) as an observation device, and collection of images under sea ice. RAIV was deployed during a research cruise in the Arctic Ocean by JAMSTEC’s oceanographic research vessel “Mirai” from August to October 2016, as part of the Arctic Challenge for Sustainability (ArCS) Project [82,83]. The vehicle succeeded in autonomous navigation under sea ice in the Arctic Ocean for the first time in Japan, acquired observation data such as salinity and temperature of sea water, and captured under-ice camera imagery. Utilizing the knowledge gained this time, JAMSTEC is strategically planning the development of advanced AUVs for full-scale Arctic observations in the near future.
During the Arctic Challenge for Sustainability II (ArCS II) Project, JAMSTEC conducted the first trial of an in-water drone during the RV Miral MR21-05C Cruise from August to October 2021 [84]. The drone named COMAI is a middle-sized AUV for under ice observation in Arctic. The trial focused on the evaluations of items affected by the Arctic environment as it was the first deployment of the drone in a polar region. A software bug caused an anomaly in the position derivation of the inertial navigation system (INS). Additionally, magnetic field distortions on the deck and the diminished strength of the Earth’s magnetic field’s horizontal components at high latitudes compromised the hybrid INS’s ability to accurately determine the vehicle’s heading. Consequently, the team had to resign the autonomous cruising test that relied on heading and absolute positions for control. The outcomes of these tests were crucial for identifying and rectifying issues, enhancing the drone’s functionality for anticipated under-ice surveys in 2022.
During the RV Mirai MR22-06C Cruise from August to September 2022, the second trial of COMAI was conducted, focusing on evaluating its navigation system and observational capabilities beneath sea ice [85]; see Figure 7. This phase involved safety tethered tests to ensure recovery, as the AUV’s autonomous retrieval functions were still under review. Notably, discrepancies were observed between the tracks derived by the hybrid navigation system and those determined by Ultra-Short Baseline (USBL) positioning, particularly when the Doppler Velocity Log (DVL) failed in deeper sea areas. This unexpected outcome signaled the need for further investigation and refinement. Despite these challenges, COMAI successfully executed a dive beneath a significant expanse of sea ice, covering a distance of over 200 meters along the ice edge. The AUV operated in a heading-depth control pattern at a target depth of 50 m, enabling the collection of vertical profiles of temperature and salinity near the ice, alongside measurements of underwater ice thickness.
Researchers at the University of Tokyo have developed an AUV named the Mobility Oriented Nadir AntarctiC Adventurer (MONACA) since 2017 [86]. It is a hover-capable platform for observing sea ice and the grounding region of ice shelves in the Antarctic Ocean; see Figure 8. In February 2023, the vehicle was deployed for the first time in Antarctic by the Ocean Observing Team of Expedition 64, National Institute of Polar Research (NIPR), Japan, from the RV Shirase anchored off the coast of Langhovde in Lütso Holm Bay [87]. In total 20 dives were conducted, with 6 sub-ice surveys, 2 mid-ocean explorations, 5 submarine topographic surveys, and 1 observation of the ice shelf edge of the Langhovde Glacier. Data such as bathymetry, seawater temperature and salinity were obtained. The know-how gained from these deployments is expected to lead to future missions aimed at observing the deep sea under glacial ice shelves.
The Polar ARV, developed by the Shenyang Institute of Automation (SIA) of the Chinese Academy of Sciences (CAS), is a versatile vehicle capable of both autonomous and remote operation via an optical fiber link [88]. This vehicle has been deployed for underwater surveys beneath Arctic sea ice on three occasions during the Chinese National Arctic Research Expeditions respectively in 2008, 2010, and 2014. Equipped with a comprehensive scientific payload, the Polar ARV features a radiometer, an altimeter, a pressure sensor, a suite of CTD sensors, and two cameras. These instruments enable it to measure spectral irradiance, ice draft, temperature, and conductivity, as well as to record images and videos beneath the ice. The data collected by the Polar ARV are crucial for understanding the under-ice environment and contribute significantly to Arctic research [89].
The TS-1000 AUV, another pioneering development by the SIA, CAS, is designed for extended fixed-point profile observations. Featuring an innovative variable ballast system, the AUV can navigate vertically in a yo-yo pattern across predetermined waypoints, capable of enduring underwater journeys exceeding 1000 km for durations of 30 days or more [90]. Deployments in January 2019 and January 2020 saw the TS-1000 AUV undertaking missions in the Ross Sea, positioned at approximately 75°S, where it gathered thermohaline profile data as part of the 35th and 36th Chinese National Antarctic Research Expeditions [89].
Additionally, the SIA developed the TS-4500 AUV, tailored for deep ocean exploration up to depths of 4500 meters. In 2021, this advanced vehicle participated in the 12th Chinese National Arctic Research Expedition. It undertook scientific missions in ice-covered regions of the high Arctic latitudes, focusing on studying the characteristics of sea ice and sub-glacial waters. This marked China’s first use of an AUV for near-seabed exploration in the Arctic [91]. To date, the SIA has deployed a diverse fleet of six underwater robots, encompassing four different models, in eight polar expeditions in recent years. This fleet includes the notable Haiyi underwater glider [92], showcasing China’s growing capabilities in this field and commitment to polar research and exploration. The vehicles developed by SIA are shown in Figure 9.
In 2022, MBARI undertook an expedition deploying two Seafloor Mapping AUVs and a ROV to examine the seafloor beneath the Canadian Beaufort Sea [93]. The Seafloor Mapping AUVs were a variant of the Dorado class AUVs, which were respectively equipped with an array of four mapping sonars for simultaneous operation. These included a swath multibeam sonar, dual sidescan sonars, and a sub-bottom profiler, all rated for depths up to 6,000 meters. The expedition aimed to explore the impacts of melting submarine permafrost in this seldom-explored Arctic region. The gathered mapping information was expected to provide essential insights into the decomposition of relict permafrost under the sea, enhancing our understanding of the Arctic’s evolving underwater landscape.
In 2023, the XH1000 AUV developed by the Harbin Engineering University in China successfully conducted under-ice environmental detection operations near the Chukchi Sea as part of the 13th Arctic Ocean scientific expedition. The vehicle mapped an area of 7,000 square meters beneath the Arctic ice, gathering detailed data on ice tomography and water properties. The scientific goal of this mission was to enhance our understanding of the dynamic changes occurring in the sea ice and oceanic conditions of the region. The data collected are pivotal in providing essential support for effectively addressing the impacts of global climate change on China [94].
2.4. Discussion of AUV Deployments in Polar Regions
Prof. Gwyn Griffiths, founder of the Marine Autonomous and Robotic Systems Facility at the National Oceanography Centre, has made significant contributions to the advancement of polar AUVs. In [25], it presented a comprehensive 50-year overview of polar AUV usage, compiling a thorough, albeit possibly not exhaustive timeline of expeditions in the website of Polar AUV Guide, an initiative by the Panel on Underwater Robotics of the Society for Underwater Technology [95]. This guide serves as a specialized portal for tracking the advancements and applications of polar AUVs globally, organizing content into five main sections: Chronology, Case Studies, Technology, Polar Environment, and Polar Missions, with a commitment to maintaining up-to-date and pertinent content.
According to [25], there have been more than 70 AUV campaigns to the polar regions by Western countries up to 2020, as documented in publicly available literature. However, in our review work, we have concentrated on discussing the most notable polar AUVs and their missions, especially those supported by specific research programs. To facilitate our analysis, we have cataloged the details of these representative polar AUV deployments in Appendix A and Figure 10 for a comprehensive overview. A total of 49 AUV deployments are summarized, most of which took place in the last two decades. Notably, over half of these deployments (30 out of 49) were conducted in the Arctic, attributed to its relatively easier accessibility. The Beaufort Sea emerged as a significant area of focus in Arctic research, while in the Antarctic, AUVs were more frequently deployed in the west, particularly under the Thwaites Glacier. The review also shows that the forefront of polar AUV developments were predominantly led by Western countries, including the UK, USA, Canada, Germany, Norway, and Australia. Key institutions leading this field include the Applied Physics Laboratory at the University of Washington; Monterey Bay Aquarium Research Institute; Woods Hole Oceanographic Institution; National Oceanography Centre; Polar Ocean Physics Group at the University of Cambridge; British Antarctic Survey; International Submarine Engineering; Alfred Wegener Institute for Polar and Marine Research; University of Gothenburg and University of Tasmania.
Several key national and international scientific programs and initiatives have involved AUV missions in the polar regions, such as the Lead Experiment, ALTEX, Autosub Under Ice Program, AGP, and TARSAN. These polar AUV missions primarily address scientific questions related to sea ice and oceans, ice shelves, biology, geology, and geophysics. A critical role of AUVs in these missions is ice mapping and measurements in the water column, which are essential for assessing the extent of polar ice and its variations, thereby enhancing our knowledge of the interactions between oceans and ice, as well as contributing valuable insights into global environmental changes.
Initially, large-sized AUVs weighing over 1000kg, such as the Explorer and Autosub series, were highly favored for their extended endurance and substantial payload capacity. Notably, the ISE Explorer AUV has used, at least for one mission, docking infrastructure for under-ice charging, operating for 10 days under ice without recovery, covering about 1000 km for under-ice bathymetric surveys. However, for easier launch and recovery operations, such as through ice holes or from boats at the sea ice edge, smaller AUVs have gained popularity in some polar missions. Examples include the Gavia, REMUS, and SeaBED AUVs, which proved useful for regional ice surveys covering areas of several square kilometers. Most of these vehicles featured a torpedo hullform, while the SeaBED AUVs, designed initially for close-range imaging applications near the seafloor, sported a unique dual-hull design that supports their hovering capability.
The data gathered by AUVs have led to a range of significant research achievements, including: providing the most detailed, directly correlated measurements of underwater ice topography ever made, capturing key data on temperature, salinity and turbulence under and around ice leads, measuring the topography of the ice canopy to examine transient events in the ice, gathering information on the warm Atlantic Layer water mass entering the Arctic Ocean via the Fram Strait, assessing the abundance of Antarctic krill under ice, revealing the topographic and oceanographic conditions beneath ice shelves, compiling the most detailed seafloor maps in the deep ocean beneath ice shelves, recording high resolution vertical profiles of the physical and biogeochemical water properties at a moving ice edge, collecting trace-metal free water samples, detecting the bioluminescence amongst zooplankton during the polar night, and exploring the grounding line of the Thwaites Glacier. These outcomes have significantly enhanced our understanding of the polar oceans, contributing vital knowledge to the fields of oceanography, climatology, and environmental science.
Based on the data presented in [25], we have updated the known number of AUV expeditions in the Arctic and Antarctic up to 2024 in Table 1. Over the past 50 years, AUV technology has significantly advanced and become indispensable in polar research. The last two decades has witnessed a distribution in expeditions using polar AUVs, that peaked around 2010. However, recent years have seen a decline in these expeditions, primarily due to the impact of the pandemic, the global economic downturn and constrained research funding. Despite these challenges, the growing need for exploration in polar environments, coupled with the advanced under-ice detection capabilities of AUVs, ensures their continued critical role in understanding and responding to global environmental changes.
3. Key Challenges in Technology for Polar AUV Deployments
In this section, we focus on the discussion of the key technologies for polar AUVs that face significant or unique challenges due to the distinctive environmental conditions of polar regions. These include aspects such as high latitude, ice coverage, extreme cold, and largely unexplored oceanic environments. Key technologies likely to be impacted encompass navigation, communication, path planning, obstacle avoidance, energy, launch and recovery, and risk analysis of AUVs in ice-covered waters. As for each technology, we will analyze the factors contributing to these challenges and provide an overview of the current solutions and innovations being implemented in the field.
3.1. Navigation
Paull et al. presents a comprehensive review of recent advancements in AUV navigation and localization that also includes fundamental techniques for state estimation and Simultaneous Localization and Mapping (SLAM) [97]. The review systematically categorizes algorithms by technical approaches, the sensors used, and the degree of collaboration among sensors and instruments. Barker et al. summarizes the challenges specific to under-ice vehicle design and navigation, offering a thorough examination of most of the known under-ice robotic vehicles and their navigation systems [98]. These are classified by vehicle type—including tethered, untethered, hybrid, and glider models—as well as the type of ice they are designed to navigate, whether it be stable glacial or sea ice, or dynamic moving sea ice. Barker and Whitcomb provide a wide-ranging review of published work on the issues of ice-relative navigation of AUVs, addressing both stationary and moving ice scenarios [99]. In this section, our focus is to discuss key navigation problems and practical solutions for an AUV operating under ice, aiming to provide readers with a clear and concise understanding of this complex topic.
Navigation of AUVs in polar regions is primarily challenged by ice coverage and high latitudes. Here, we refer to navigation as the positioning or estimation of AUV states through data fusion. Due to the ice cover, AUVs are unable to surface for GPS position fixes, so that an acoustic navigation system is applied where possible for under-ice relative positioning. These systems employ acoustic transducers which can be mounted on a ship, on buoys (fixed on the ice or floating on the water surface), or on the seafloor, to accurately locate the vehicle when underwater.
A notable innovation in this domain is the development of a Stand-alone USBL Positioning Buoy system, specifically designed for under-ice positioning of the Gavia AUV [3]; see Figure 11. This system comprises a USBL transducer integrated with an Attitude and Heading Reference System (AHRS), delivering high-accuracy 3D positioning of the AUV within a constrained range. Above water, the system is outfitted with a Global Navigation Satellite System (GNSS) receiver, complemented by a compass and a long-range Wi-Fi data radio to maintain communication with the support vessel. The entire setup is mounted on a portable, easily assembled spar buoy, along with batteries and interfacing equipment. On the AUV side, the vehicle is equipped with a transponder capable of responding to the USBL signals and communicating with the support vessel, ensuring efficient and precise navigation under challenging polar conditions.
In [100], a novel approach was introduced to enhance AUV navigation under ice through the use of a network of free-drifting buoys, as illustrated in Figure 12. These buoys, strategically anchored to the ice, serve a critical function in constraining the navigational errors that may occur during AUV missions beneath the ice. This system of intelligent buoys plays a pivotal role in safeguarding the AUV by maintaining its navigational accuracy, a necessity for its safe operation under the unpredictable conditions presented by ice-covered waters. Additionally, these buoys are instrumental in estimating the velocity of ice drift, providing valuable data that can significantly aid in the AUV navigation and guidance within the dynamic and ever-changing polar environment. This strategic use of buoy networks marks a significant advancement in facilitating reliable and efficient AUV operations under ice. The efficacy of this approach has been confirmed through a simulation study, which utilized ice drift data from an ice drift and forecasting tool specifically designed for AUV operations. The study yielded promising results, indicating a strong potential for practical application. Consequently, this leads to an anticipation of further fieldwork to fully realize and validate the approach in real-world polar environments.
Dead Reckoning that uses speed (ideally relative to the ground or to fixed ice) and attitude to obtain an estimate of AUV current position is widely applied in the absence of position fixes (either GPS or acoustic fixes) when the vehicle runs underwater. For example, during its mission beneath the Fimbul Ice Shelf in Antarctica, the Autosub2 AUV utilized both upward-looking and downward-looking DVLs to furnish a Dead Reckoning navigation system, successfully navigating over 20 km under the ice shelf [101]. A Kalman filter or its variants are usually used for data fusion, to increase the accuracy of dead reckoning [102,103]. Navigating in polar regions involves distinct challenges for heading measurements, primarily because of the nearly vertical magnetic field lines near the Magnetic Poles affecting magnetic navigation techniques. Additionally, gyroscopic methods encounter amplified errors due to their reliance on the Earth’s rotation rate, with inaccuracies increasing with the secant (1/cosine) of latitude [95]. To address these issues, the National Oceanography Centre has innovated in-situ self-calibration procedures and algorithms specifically for the Autosub Long Range AUV. These enhancements aim to improve the accuracy of magnetic compass measurements. As reported by McPhail et al. [104], this approach has yielded satisfactory navigation performance, especially for missions with endpoints near their starting points, thereby significantly advancing the capabilities of AUVs in polar navigation.
McEwen et al. developed a navigation system for the ALTEX AUV to operate in the Arctic, particularly at latitudes exceeding 80° [105]. This comprehensive system incorporated a ring-laser gyro-based INS, a DVL and a GPS receiver. Additionally, it featured a separate fiber-optic gyrocompass AHRS, as well as a traditional magnetic flux-gate AHRS. At high latitudes, where gyrocompass accuracy diminishes, the system utilized a Kalman Filter estimation algorithm. This algorithm aligned the INS with the geographic frame using GPS data, or DVL data if GPS was unavailable, ensuring accurate under-ice navigation. Arctic trials confirmed the system’s reliability and, with bathymetry following, its potential for basin-scale surveys.
Besides traditional underwater navigation techniques, geophysical referencing enables an AUV to determine its position through sensory feedback. This technique, known as terrain relative navigation (TRN), involves localization by matching local measurements with a pre-provided reference map, thereby narrowing down the AUV’s probable location. Salavasidis et al. have examined the application of TRN techniques to prolong under ice missions of Autosub Long-Range 1500 (ALR1500) AUV [106]. This approach eliminates the need for external assistance or regular surfacing, relying instead on a limited set of low-power sensors and sparse bathymetric maps. The study envisioned the ALR1500 conducting a continuous under-ice survey stretching from Svalbard to Point Barrow in Arctic, covering a distance exceeding 3200 km. To assess the navigation efficacy in such challenging conditions, the researchers developed a simulated Arctic Ocean environment. This model incorporated error factors for high-latitude heading estimations, a cutting-edge ocean circulation model, and detailed Arctic bathymetric data. This innovative navigation strategy represents a significant advancement in enhancing the operational range and capabilities of AUVs in polar expeditions.
An alternate geophysical method is the teach-and-repeat (TR) path-following approach, which offers a simplified alternative to SLAM for AUV navigation, bypassing the need for global positioning by referencing previously gathered sensory data [107]. This approach reduces system complexity and enables AUVs to retrace a path based on prior sensory inputs, proving ideal for long-distance explorations into unknown territories. By avoiding the accumulation of global positioning errors, AUVs can safely return along their initial routes. Implemented on an ISE Explorer AUV with sonar as the primary sensor, this methodology facilitated successful autonomous navigation over up to 5 km in real marine settings [107]. The technique’s effectiveness is attributed to enhanced image registration methods that capitalize on sonar’s distinct imaging features, marking a significant advancement in AUV technology for conducting repeated, extensive missions across dynamic oceanic environments.
In summary, AUV positioning in polar regions is a complex task, given the challenging environmental conditions and the limitations of conventional navigation systems like GPS under ice. Effective positioning strategies are crucial for the success of missions in these areas. The key methods include:
- Acoustic positioning: This method involves the use of acoustic beacons placed on the ice, buoys, or the seafloor. By combining long-range acoustic bearing systems with short-range localization systems, it is possible to achieve both expansive coverage and precise positioning. Long baseline (LBL) and ultra-short baseline (USBL) systems are typically used, leveraging the propagation of sound waves in water to triangulate the AUV’s position with high accuracy.
- Conventional dead-reckoning: The commonly-used inertial navigation systems (INS), Doppler velocity logs (DVL), pressure sensor and electrical compass are usually integrated to track the movement of the AUV from a known starting point. Data from these different sources are often fused using advanced filtering algorithms, such as Kalman filters, to enhance positioning accuracy. This method relies on the continuous accumulation of positional data, corrected for drift and error over time, to maintain an accurate track of the AUV’s trajectory.
- Terrain, geomagnetic and gravity field-assisted navigation: These methods are particularly valuable in environments where traditional GPS and acoustic systems are limited or unavailable. Pre-existing bathymetric, geomagnetic, and gravity maps provide reference data that can be used for navigation. For instance, terrain-aided navigation (TAN) uses detailed seafloor topography to cross-reference the AUV’s position, while geomagnetic and gravity field data offer additional layers of spatial information. These techniques are effective in areas with distinct geological features, although their integration remains an active area of research and development.
- Underwater GPS technology: Emerging technologies, such as underwater GPS, are being developed to provide more precise underwater navigation. These systems use sound waves in a manner analogous to traditional GPS, enabling accurate positioning even in the absence of direct satellite signals. Underwater GPS technology represents a significant advancement, promising to enhance the reliability and precision of AUV navigation in polar regions [108].
Each of these methods has its inherent advantages and limitations. Consequently, a combination of several systems is often employed to ensure accurate positioning of AUVs in the challenging polar environments. The integration of multiple navigation techniques allows for redundancy and cross-verification, thereby increasing the robustness and reliability of the positioning system. Ongoing research and technological advancements continue to improve these methods, addressing the unique challenges posed by the polar regions and enhancing the overall efficacy of AUV missions.
3.2. Communication
Communications and telemetry are crucial for the effective management of AUV missions and are particularly vital in scenarios involving the recovery of a missing vehicle. In regions with sea ice, the standard practice of AUVs surfacing for satellite or terrestrial radio communications poses greater challenges and risks compared to open water environments. In areas completely covered by ice, such as beneath ice shelves, this method of communication may be entirely unfeasible, significantly complicating mission operations and vehicle recovery efforts.
Communications with an under-ice AUV typically occurs through acoustic methods. However, the ice conditions in polar regions cause a particularly challenging acoustic environment. This complexity arises from multipath effects caused by sound waves interacting repeatedly with the ice cover [109]. Additionally, acoustic propagation in polar regions may be intensively influenced by strong vertical gradients of sound speed especially if the upper layers of the ocean comprise cold, fresh melt water [110,111]. These factors significantly impact the range and reliability of acoustic communications in these extreme environments. In addition to these challenges, underwater acoustic communication faces limitations in bandwidth due to transmission losses, which escalate with both higher frequency and greater transmission distance [112]. These factors collectively make underwater communication in polar regions a complex and challenging task, necessitating innovative solutions to ensure effective and reliable AUV operations.
Both Johnson et al. [113] and Freitag et al. [114] conducted trials on under-ice acoustic communications. Johnson et al. tested an acoustic communication network consisting of six nodes, including communications with the Odyssey AUV navigating through the network [113]. This network was established over a 15 km2 area in an ice-covered lake and a 22 km2 area in the Beaufort Sea. The experiments utilized a 15 kHz frequency, achieving a typical data rate of 5 kbps. While the network performed reliably in the lake, ambient noise in the Arctic significantly affected connectivity. Freitag et al. determined that a frequency of 12 Hz offered the most reliable communication, achieving the highest signal-to-noise ratio (SNR) across distances ranging from 20 to 75 km [114]. These findings highlight that acoustic communication performance, in terms of bandwidth, operational range, and reliability, is significantly influenced by environmental conditions.
Ensuring successful under-ice operations necessitates a reliable acoustic communication system. Due to the bandwidth limitations inherent in underwater acoustic communications, interactions with the AUV are typically confined to simple control commands (“Continue,” “Surface,” “Abort,” “Go to Mission line XX”) and receiving concise status updates from the vehicle. McPhail et al. addressed this challenge by integrating the LinkQuest Tracklink 10000 system with the Autosub 3 AUV and the AUV monitoring and control systems on the ship side for the PIG Ice Shelf mission in January 2009 [44]. This integration efficiently merged short message transmission and reception with USBL tracking. However, the USBL system’s limited tracking range (3.5 km horizontal range with the AUV submerged to a depth of 800 m) proved inadequate for correcting navigation errors when DVL bottom tracking was lost for significant portions of the mission. To compensate, a low-frequency beacon system was devised for the AUV, emitting a 4.5 kHz narrow-band chirp every minute, capable of reaching up to 30 km under optimal conditions. The beacon’s receiver, a hydrophone array, was manually deployed 50 m below the ship to minimize noise interference from the vessel.
Acoustic positioning often goes hand-in-hand with acoustic communication. Plueddemann et al. implemented an integrated acoustic navigation and communication system with a unified working frequency to ensure effective communication and accurate positioning across various distances [76]. The system on the REMUS AUV featured a 10 kHz acoustic modem, a 10 kHz Long Base Line (LBL) navigation system, a shared 10 kHz transducer for both the modem and LBL, and a four-element, 25 kHz USBL navigation system. The 10 kHz components were utilized for their extended range capabilities, whereas the USBL system operating at 25 kHz, was designated for precise homing and docking procedures. In March 2010, this sophisticated system was tested under a coastal ice floe near Barrow, Alaska. The survey missions collectively mapped out 14 km of track lines through a blend of USBL and LBL navigation, all concluding with a successful net-capture recovery. These tests demonstrated the AUV’s ability to operate from shorefast coastal sea ice and to gather detailed hydrographic data from the Arctic shelf waters, illustrating the integrated acoustic system’s effectiveness for AUV operations under the demanding conditions of the Arctic.
A promising approach for continuous ice monitoring with AUVs involves setting up an acoustic network in the targeted ice monitoring area [77]. Schneider et al. introduced a self-adapting under-ice integrated communications and navigation network, which was tested with the MIT-owned Bluefin 21 AUV during the Ice Exercise in March 2020 (ICEX20) in the Beaufort Sea [115,116]. The complex acoustic propagation conditions in the Beaufort Sea, varying with depth, pose a significant challenge for maintaining reliable connectivity between the AUV and surface operators through ice buoys. To address this, the ice buoys were outfitted with transmitters and receivers at multiple depths, and the system’s adaptability was enhanced through an oceanographic and acoustic propagation model to anticipate the most effective receiver and transmitter settings. Although the experimental outcomes highlighted challenges in precisely predicting modem performance using modeling techniques alone, incorporating a machine learning strategy that leverages real-time data showed potential for enhancing system reliability, particularly for extended missions with ample opportunity for gathering training data.
Communication with AUVs in polar regions presents unique challenges due to the extreme conditions and the presence of ice cover. Improving communication technologies and strategies for polar AUVs is essential for enhancing their operational efficiency, data transmission capability, and overall mission success in challenging polar environments. Key aspects include:
- Acoustic communication: Acoustic modems are the primary method for under-ice AUV communication, utilizing sound waves to transmit data through water. However, acoustic signals can be attenuated by ice cover, limiting both range and data transfer rates. Advances in signal processing and underwater acoustic technologies are continuously improving the reliability and efficiency of acoustic communication systems for polar AUV operations.
- Surface communication: When AUVs surface in open water areas, they can utilize satellite or Radio Frequency (RF) communication systems, such as Iridium, for data transfer and receiving commands. This method circumvents the limitations imposed by ice cover on acoustic communication. However, operational constraints may still arise in regions where satellite coverage is limited or compromised by polar conditions.
- Buoy relay systems: Deploying buoys equipped with integrated acoustic modems (for underwater communication) and satellite links (for surface communication) serves as a bridge between submerged AUVs and base stations. These buoy relay systems enable seamless communication transitions between underwater and surface environments, extending operational range and enhancing data transfer capabilities in polar regions. Strategic placement of buoys optimizes communication reliability and facilitates continuous monitoring and control of AUV missions.
- Data muling: In scenarios where real-time communication is impractical, AUVs can store collected data onboard for physical retrieval upon mission completion. This approach ensures data integrity and security, particularly in remote and inaccessible polar regions where communication disruptions are common. Advances in data storage technologies and onboard processing capabilities further support efficient data muling strategies for extended mission durations.
- Inter-vehicle communication: In collaborative missions involving multiple AUVs or other vehicles, inter-vehicle communication plays a crucial role in data sharing and mission coordination. AUVs can exchange real-time data, coordinate maneuvers, and optimize survey coverage through collaborative communication protocols. Enhanced networking capabilities and protocols tailored for polar environments enable synchronized operations and adaptive decision-making among autonomous vehicles.
Each communication method offers distinct advantages and challenges. The strategic integration of multiple communication systems enhances resilience and reliability, mitigating the impact of environmental variables on AUV operations in polar regions. Ongoing advancements in communication technologies, coupled with rigorous testing and deployment strategies, continue to optimize communication solutions for polar AUVs, supporting comprehensive scientific research and operational objectives in these remote and dynamic environments.
3.3. Path Planning and Obstacle Avoidance
Path planning and obstacle avoidance are pivotal for AUV autonomy, especially for ensuring their safe navigation beneath ice. Li et al. reviewed the path planning technologies for AUVs, including grid terrain modeling and path search algorithms [117]. Cheng et al. categorized AUV path planning into two main types: global path planning, which deals with known static obstacles, and local path planning, which addresses unknown and dynamic obstacles [118]. Obstacle avoidance typically involves local path planning, while traditional path planning methods are applicable to polar AUVs, albeit with specific adaptations and considerations tailored to the unique challenges of under-ice environments.
When equipped with a global map detailing the locations and contours of static obstacles, an AUV can pre-plan a collision-free path from start to destination using global path planning methods. This approach encompasses various algorithms such as A* [119,120], genetic algorithms [121,122], differential evolution [123,124], particle swarm optimization [125,126] and ant colony optimization [127,128], each contributing to efficient navigational solutions for AUVs.
In dynamic and uncertain underwater scenarios, local path planning and obstacle avoidance are crucial for an AUV’s safety to navigate around unknown and dynamic obstacles, based on a path initially laid out by a global planner. The local environment information is usually sensed by onboard sensors, such as cameras or sonars. Popular local path planning methods include Rapidly-exploring Random Trees (RRT) [129,130], artificial potential field [131,132], fuzzy logic algorithm [133,134], neural network [135,136], reinforcement learning [137,138] and deep reinforcement learning [139,140].
Each method has its pros and cons in complexity, robustness, searching efficiency, computing and storage cost, requirements of empirical knowledge and pre-training processes. In certain scenarios, integrating different path planning algorithms can significantly enhance overall performance, providing a composite approach that leverages the strengths of each method [141,142,143]. However, many of the aforementioned methods have predominantly been validated through simulations, with only a select few being practically tested on actual AUV platforms. The application of these methods specifically on polar AUVs remains even more limited.
In the context of under-ice AUV operations, global paths are typically pre-planned and programmed by operators prior to missions, based on available historical information or rough on-site sampling data. Therefore, local path planning and obstacle avoidance methods are necessary, as the AUV ventures into unknown environments. In real-world polar AUV missions, simplicity and robustness are key attributes for effective obstacle avoidance systems. Adapting existing obstacle avoidance methodologies for use in AUVs poses a unique set of practical challenges, particularly in demanding and often unpredictable polar settings.
A collision avoidance algorithm was developed for the Autosub 2 and Autosub 3 AUVs [44,144]. The altitude detection system incorporated both up-looking and down-looking Acoustic Doppler Current Profilers (ADCPs), while a forward-looking Echo Sounder was utilized for obstacle detection ahead. The forward range detection was dynamically adjustable through mission-configurable parameters, allowing for fine-tuning of the vehicle’s response to the sonar data. The collision avoidance mechanism was activated only under specific continuous conditions: a breach in depth (or altitude) safety limits, or when the forward range to an obstacle fell below a certain threshold while the rate of range decrease exceeded another set threshold. Upon activation, the AUV retreated a pre-set horizontal distance, simultaneously adjusting its depth limits to predetermined ‘safer’ levels as dictated by the depth controller. Following this retreat, the AUV executed a turn and set off on a random course to navigate around the obstacle. After bypassing the obstacle, the AUV returned to its original track. This approach has proven successful in various polar missions undertaken by Autosub AUVs, effectively navigating complex under-ice environments.
Underwater obstacle detection is often hampered by the limitations of acoustic range sensors, which are prone to noise interference, and the limited maneuverability of vehicles. Additionally, minimizing disruption from other acoustic devices is a significant challenge. ISE addressed these challenges by developing a flexible and effective obstacle avoidance system for its Explorer AUVs [145]. This system integrates vector field, reactive, and object mapping algorithms, and employs an array of single beam echosounders for sensing, chosen for their simplicity and compact size. The system’s algorithm categorizes the surrounding area into three types of regions for obstacle avoidance: avoidance region, restricted regions, and emergency stop (e-stop) region, each designated to ensure the AUV’s safe maneuvering in complex underwater environments.
The Explorer AUV operates based on a predefined mission path, and the obstacle avoidance system is seamlessly integrated into mission execution [145]. This integration allows the AUV to temporarily deviate from its projected mission path to navigate around obstacles, and then return to its original course once the obstacle is cleared. The system also incorporates an “emergency stop” feature for situations where obstacles are too close to avoid, along with fault response mechanisms to prevent excessive deviation from the planned course.
This innovative obstacle avoidance system has undergone rigorous validation through sea trials and become commercially available for ISE Explorer class AUVs [146]. Its exceptional maneuverability and obstacle avoidance capabilities have greatly enhanced the confidence in deploying Explorer AUVs for polar missions. These features are particularly valuable for avoiding collisions with uncharted bottom features or ice keels, making it a critical asset for successful and safe polar explorations [147].
King et al. have proposed a risk-averse strategy for mission planning and execution, specifically designed to enhance the likelihood of vehicle recovery during under-ice operations [69]. Central to this approach is a straightforward yet effective mission template, which clearly defines mission locations and task transitions with a heightened focus on vehicle recovery as a primary objective. In early 2020, this methodology was successfully applied to the AUV nupiri muka (an ISE Explorer class AUV) during a mission in the Thwaites Glacier region of Antarctica. The implementation of this strategy demonstrated significant value, enabling reliable and effective AUV operations in this challenging and dynamic environment. Similarly, Chen et al. introduced an offboard risk-based path planning method for AUVs navigating through oil spill zones [148]. They developed a risk assessment model using a Bayesian network for probabilistic analysis of risk conditions based on varied environmental inputs. This method was tested in a simulated scenario featuring a Slocum glider maneuvering in a natural spill environment around Baffin Bay.
Path planning and obstacle avoidance are critical components for the successful operation of polar AUVs. These tasks are particularly challenging in polar regions due to the complex and dynamic under-ice environments. Key considerations include:
- Dynamic under-ice terrain: Polar regions exhibit constantly changing ice conditions, including icebergs, ridges, and variable ice thickness. AUVs necessitate adaptive path planning strategies to navigate these unpredictable environments safely and efficiently.
- Advanced sensing and mapping: Leveraging advanced sensing technologies such as sonar and camera, AUVs can generate real-time maps of their surroundings. These detailed maps are critical for identifying potential obstacles and planning optimal navigation paths to avoid hazards.
- 3D path planning algorithms: Effective path planning algorithms must process environmental data in three dimensions, incorporating depth constraints to navigate around or beneath ice formations. These algorithms optimize route efficiency while ensuring safe passage through intricate under-ice terrains.
- Simulations and predictive models: Prior to deployment, simulations and predictive models can be used to simulate ice movements and underwater topography. These tools provide valuable insights for planning missions, anticipating environmental challenges, and refining path planning strategies to enhance operational success.
- Autonomy in decision-making: Due to limited communication with surface operators, AUVs rely on high levels of autonomy to make real-time decisions for obstacle avoidance and path adjustments. Autonomous systems continuously analyze sensor data, enabling swift responses to dynamic environmental changes without human intervention. Incorporating machine learning and artificial intelligence (AI) enhances AUV capabilities in obstacle detection and path planning. AI algorithms learn from past missions, improving decision-making processes and adapting strategies based on accumulated experience and environmental conditions.
- Safety protocols: Implementing robust safety protocols is essential for handling emergency situations. Features such as automatic return-to-home capabilities and protocols for hovering in place upon encountering unexpected obstacles ensure mission safety and data integrity.
Each of these components plays a crucial role in overcoming the challenges posed by polar environments, facilitating safe and efficient operations of AUVs. Continued advancements in path planning technology and methodologies further enhance AUV capabilities, contributing to deeper understanding and sustainable management of polar ecosystems.
3.4. Energy
The endurance of an AUV is primarily dictated by its onboard energy capacity. Given the complexities and extreme conditions of polar missions, maximizing the AUV’s operational time in the field is crucial to gather extensive data per deployment and to mitigate potential difficulties in launch and recovery processes. Consequently, sustainable energy technology becomes a critical factor for the effectiveness and longevity of polar missions.
Although the energy technologies used in polar regions are largely similar to those used in open oceans, a key distinction lies in the need for these systems to withstand relatively low temperatures, both in the air and water. A notable challenge is the performance degradation of power systems, such as widely-used lithium batteries, in low-temperature conditions. Bandhauer et al. noted that battery capacity can significantly decrease, particularly when ambient temperatures fall below -20°C [149]. This factor necessitates careful consideration and planning when deploying polar AUVs to ensure their operational efficiency and mission success in these harsh and frigid environments.
Bradley et al. explored the complexities of developing battery systems and charging methods for AUVs operating for the Autonomous Ocean Sampling Network (AOSN) [150]. Their study focused on optimizing battery chemistry, management, and in situ charging to achieve high power density, ensure reliability in low temperatures, and adhere to safety standards. Lithium-ion secondary cells were identified as the best fit for AUV use in the AOSN, given their long lifespan, ability to operate in sealed enclosures, and high energy density similar to alkaline primary cells. The study highlighted that cells functioning at ambient pressure would significantly benefit the AUV field.
For AUVs designed for shallow depths, batteries and electronics are often protected within pressure vessels to shield them from water and pressure. Yet, as the required operational depth increases, so does the weight of these vessels, limiting the available mass budget that can be allocated to the vehicle’s size or leading to larger and heavier AUVs for the same capacities. An alternative approach involves employing pressure-tolerant battery technologies encapsulated within a compliant, non-conductive medium [151]. This method is particularly prevalent in AUVs designed for very deep dives, such as the Bluefin-12 and Autosub6000, allowing them to withstand the immense pressures encountered in deep-ocean environments without the need for heavy pressure vessels [152,153].
After years of dedicated research by a multidisciplinary engineering team, Bluefin Robotics has achieved a breakthrough in developing a safe, dependable, and high-performance pressure-tolerant battery tailored for its Bluefin series AUVs [152]. This innovation, leveraging polymer-electrolyte cells, introduces pressure tolerance as a pivotal feature, significantly influencing both vehicle design and operational logistics. It enables the construction of large battery packs without the drawbacks of traditional, bulky pressure vessels, streamlining the design process. Moreover, this advancement simplifies operational procedures, permitting rapid battery exchanges by a single operator, thereby reducing the downtime usually needed for maintenance of o-rings and seals. This efficiency boost not only streamlines field operations but also considerably shortens the turnaround time for missions.
The development of the Autosub6000 AUV showcases a significant advancement in deep-sea exploration capabilities, marrying deep depth proficiency with extended range. This achievement stems from the implementation of pressure-balanced lithium polymer battery technology, where the battery cells operate under ambient pressure, proving to be a practical and efficient solution [153]. Such an approach ensures that the energy density of the system, whether measured volumetrically or gravimetrically, remains consistent across varied operational depths. Moreover, this technology circumvents the need for traditional, heavy, and costly pressure vessels made of materials like titanium or the use of newer, less reliable materials like ceramics or wound fiber. Consequently, the Autosub6000’s adoption of pressure-balanced lithium polymer batteries not only enhances its operational efficiency and depth range but also presents a more economically viable solution in the development of advanced AUVs.
Roper et al. detailed the design and functionalities of the Autosub Long Range 6000 (ALR6000) AUV, a significant addition to the NOC’s Autosub fleet [154]. Engineered for deep-sea exploration, the ALR6000 is a 6000 m-rated AUV, built for lengthy missions up to 2-3 months. It incorporates high energy-density lithium metal primary cells, a hydrodynamic hull form, an efficient propulsion mechanism, a novel passive buoyancy adjustment scheme, and a power-conserving navigation and mission management setup. This combination has produced ALR6000 with a theoretical range exceeding 1800 km. Early missions have already demonstrated the ALR6000’s potential in gathering significant scientific data from deep oceanic and under-ice environments. Moreover, a variant rated for 1500 m is in development, aiming to extend the reach of long-range under-ice explorations [155].
A pressure-tolerant lithium polymer battery was also developed for the Autosub2000 Under Ice (Autosub2KUI) AUV specifically designed for under ice missions. The Autosub2KUI AUV is engineered for an initial depth rating of 2000 m, with all components, excluding the syntactic foam, built to withstand depths of up to 6000m. The Autosub2KUI batteries employ Kokam 12Ah pouch cells, arranged in a 2P14S configuration per module, with a custom battery management system. Each battery comprises four such modules in parallel, offering a total energy capacity of 4.97 kWh at a a nominal 51.8V for the submarine [151]. This compares to the 22.86 kWh of power provided by the lithium polymer rechargeable cells in the Autosub6000 AUV, and the 38 kWh delivered by the lithium primary cells in the Autosub Long Range 6000 [153,154]. These batteries are encased in custom-designed polyethylene boxes, offering a compliant housing that effectively transmits hydrostatic pressure while safeguarding the batteries from seawater intrusion.
Secondary battery packs are presently the predominant energy storage solution for AUVs. To further extend the operational range of larger AUVs, semi fuel cell or hybrid fuel cell/battery systems present a promising option. Fuel cells offer notably higher energy than batteries and have matured as a well-developed technology, as reviewed by Mendez et al. [156,157] and Weydahl et al. [158].
The Norwegian Defence Research Establishment (FFI), in collaboration with Kongsberg Maritime, has pioneered in developing innovative power solutions for AUVs. Their advancements include the creation of a magnesium-seawater battery [159], an aluminium-hydrogen peroxide (Al/H2O2) semi fuel cell [160], and a pressure-tolerant Li-ion battery [161]. Notably, the Al/H2O2 semi fuel cell, used in the HUGIN II, 3000, and 4500 AUVs from 1998 to 2017, set a world endurance record for commercial AUVs at depths beyond 3000 m [162]. Moreover, the introduction of the pressure-tolerant lithium-ion battery in the HUGIN 1000 AUV in 2004 has sustained the operational capabilities of the HUGIN series AUVs, highlighting Kongsberg Maritime’s ongoing contributions to AUV technology.
While fuel cell systems hold promise for greatly enhancing AUV endurance beyond that of conventional batteries, their application underwater presents several hurdles. These include managing the storage or production of hydrogen and oxygen, ensuring buoyancy and trim stability, and contending with the corrosive marine environment [158]. Securing the integrity of the fuel cell within a sealed container introduces further complexities, such as managing condensation, maintaining adequate cooling, and preventing accumulation of inert gases or reactants. A notable advancement in this area was the successful 35-hour operation of a 60 kWh aluminum oxygen fuel cell on ISE’s pioneering AUV, ARCS, which has been instrumental in AUV technology development since 1983 [163]. In addition, FFI has also overcome many operational challenges associated with long-endurance fuel cell systems for AUVs, demonstrating a 24-hour underwater run of their fuel cell system [164].
At the meanwhile, innovative approaches to integrating hybrid power systems within AUVs have also been explored. Borgogna et al. presented a groundbreaking power system combining rechargeable batteries, fuel cells, and chemical gas storage, utilizing a Proton Exchange Membrane (PEM) fuel cell powered by pure hydrogen and oxygen from replaceable chemical storage [165]. Furthermore, Chiche et al. proposed a compact hybrid fuel cell/battery system tailored for AUVs, focusing on optimizing the system’s size based on operational power demands [166]. These developments represent significant steps toward enhancing AUV endurance and operational flexibility in challenging underwater environments.
Wang et al. reviewed the potential power systems and environmental energy conversion approaches for unmanned underwater vehicles [167]. This review covered tether power systems, various battery technologies (including primary and secondary batteries, fuel cells, semi fuel cells, and hybrid systems), the use of environmental energy sources (such as solar, ocean thermal, and wave energy), and the employment of docking stations for recharging and data transfer. The advantages and drawbacks of the mentioned power supply techniques were compared. It was concluded that harnessing environmental energy, particularly wave energy, holds the most promise as a sustainable power source for unmanned underwater vehicles.
Energy considerations are crucial for the operation of polar AUVs, given the extreme conditions and the extended duration of missions in such challenging environments. Efficient energy management significantly impacts the AUV’s endurance, range, and overall performance. Key aspects include:
- Battery technology: Polar AUVs primarily rely on advanced battery systems to power their operations. Lithium-based batteries are preferred for their high energy density and reliability, particularly in cold temperatures. Ongoing research focuses on enhancing battery efficiency and cold-tolerance, aiming to extend operational durations and improve reliability under polar conditions. Fuel cells present a promising alternative power source for polar AUVs, offering advantages such as extended endurance, cold tolerance, and reduced environmental impact. However, challenges remain in fuel storage, cold start capability, and integration complexity.
- Energy-efficient design: The design of AUVs plays a crucial role in minimizing energy consumption. This involves optimizing hydrodynamic efficiency to reduce drag, employing energy-efficient propulsion systems, and carefully managing power requirements for onboard sensors and communication systems. Efficient design practices ensure optimal energy utilization throughout the mission lifecycle.
- Operational strategy: Mission planning must meticulously consider energy constraints to maximize operational efficiency. This includes optimizing travel routes to minimize energy consumption, strategically managing the operational periods of energy-intensive instruments, and balancing exploration depth, speed, and data collection priorities to optimize energy use without compromising mission objectives.
- Renewable energy sources: Exploring renewable energy sources is essential for extending mission durations and reducing reliance on traditional battery power. Integration of solar panels for surface charging and environmental energy harvesting technologies offer promising avenues to supplement onboard power systems, particularly during extended missions in sunlit polar regions.
- Autonomous recharging: Developing autonomous recharging capabilities is critical for prolonged AUV operations. Solutions such as docking stations on ice shelves or buoys equipped with renewable energy sources can facilitate autonomous recharging, thereby extending mission endurance and operational flexibility without the need for manual intervention.
- Energy storage and backup systems: Ensuring adequate energy storage capacity and reliable backup systems is imperative to maintain uninterrupted AUV operation. Robust energy storage solutions and contingency plans for unexpected energy drains or emergencies are essential safeguards in the unpredictable polar environment.
Energy management in polar AUVs requires a delicate balance between available power resources, mission objectives, and the inherent environmental constraints of polar regions. Continuous advancements in power technology and innovative energy management strategies are pivotal to enhancing AUV capabilities and ensuring reliable performance in demanding polar environments.
3.5. Launch and Recovery
During open-water operations, the support ship typically stays close to the survey area. An AUV can be deployed directly from the ship’s deck into the water to start its mission. After completing its tasks or if an emergency arises, the AUV surfaces at its current location. If feasible, the AUV’s return journey is monitored via acoustic tracking devices. Upon surfacing, the AUV is positioned using its strobe light and GPS signals, along with Wi-Fi, RF (Radio Frequency), or satellite communications. The ship then navigates to the AUV’s position for recovery [58].
However, due to the complex and rapidly changing conditions in polar regions, the launch and recovery of AUVs face significant logistical and operational challenges. Typically, AUV deployment can occur directly from the ice [11,71,168] or from supporting vessels [58]. In certain circumstances, a vehicle can be deployed from shore using a modified boat trailer and this has also been adopted in Antarctic missions [68]. The AUV then commutes to the target mission area, with both the transit time and energy required for reaching and operating in the target area considered during mission planning.
Deploying an AUV from ice necessitates creating a hole through the ice to mitigate the risks associated with launching from the ice edge, where conditions are often uncertain. The complexity of this task varies with the AUV’s size and the ice’s thickness. Ferguson et al. [169], Doble et al. [71], and Kaminski et al. [11] utilized hot water drills to penetrate the ice, whereas Kukulya et al. managed to cut through thinner ice (20 cm) manually [170]. Beyond cutting, removing the ice blocks from the hole typically requires mechanical aids like cranes or snowmobiles. Additionally, the dynamic nature of the polar environment poses unique operational challenges. For instance, Kukulya et al. reported an incident where their team had to quickly evacuate a seemingly stable ice floe just an hour after deployment when it unexpectedly began to disintegrate [170]. This indicates the inherent difficulties of conducting operations in the Arctic, particularly during dark periods and the spring/summer seasons. These times are marked by considerable risks due to ice melting, significantly narrowing the safe operational window for Arctic missions, typically limited to March and April, as highlighted in [171].
To mitigate the logistical complexities of ice operations, the Kaminski et al. team initiated a 7.4-meter AUV launch from a primary base near Borden Island, while establishing a remote station approximately 300 km distant for recharging and data retrieval [11]. They successfully maintained the AUV in continuous operation, navigating from the primary to remote sites, completing an ambitious 12-day mission. This operation’s cornerstone was the CATCHY II mechanism, enabling under-ice docking by securing the AUV beneath an ice hole. A supplementary light-duty ROV facilitated the AUV’s attachment to CATCHY II. Connection for power and data transfer was achieved via a SEACON underwater mateable connector, extended from the surface console. This innovative approach, originally conceived by Memorial University of Newfoundland (MUN) and further refined by ISE, exemplifies strategic advancements in under-ice AUV deployment and management [172,173].
In a typical open water operation, an AUV gets satellite position updates and then dives from the water surface. This requires a significant area of open water for torpedo-typed underactuated vehicles. Deploying an AUV through an ice hole complicates this process, as traditional surface launches are not viable. For thin ice scenarios with lighter vehicles, hand launching adjacent to the hole is feasible. This involves holding the vehicle’s tail above water, aligning its nose towards the water, activating the propeller, and then releasing, allowing it to thrust downward and avoid ice collision [71]. For thicker ice or in the vicinity of deep ice ridges, employing a weight-release system, either automatic or manual, facilitates reaching a pre-determined depth before commencing the mission [11,23]. This approach is particularly advantageous near the ice edge or in densely iced regions, where surface maneuverability is restricted.
For vehicles equipped with a variable ballast system, as noted by [11,169], adjusting the vehicle’s buoyancy becomes straightforward. By setting the ballast to create negative buoyancy, the AUV can smoothly descend to a predetermined depth. Upon verifying the AUV has reached this depth, the ballast is readjusted to render the buoyancy slightly positive, facilitating the initiation of its mission. This method ensures precise depth control, critical for the successful start of operations under ice or in confined spaces. In addition, the ballast adjustment system often becomes essential at the work site, especially in areas where ice melting causes significant variations in water density. This variability can lead to unexpected changes in the vehicle’s buoyancy, rendering it challenging to control its depth. Implementing a ballast adjustment system helps counteract these effects, ensuring stable and controllable depth management for the vehicle [23].
Depending on the on-site situation and task requirements, an icebreaker could be driven to create an open lead or pond within certain distance (like 1 km) of the target zone. The presence and condition of such leads can significantly differ from one dive to another, with the potential for dramatic shifts between the AUV’s deployment and retrieval during a single operation. The AUV is deployed via the lead, embarking on a mission programmed to navigate primarily through acoustic beacons anchored to the ship, a positioning buoy, the ice, or the seabed. Given the dynamic nature of Arctic ice, which constantly moves, and with missions potentially extending up to 24 hours, the initially used open lead might drift several kilometers away or close entirely, making it unsuitable for the AUV’s recovery [58]. This necessitates the ability to guide the AUV to an alternate recovery site, whether for standard retrieval or in response to equipment or software malfunctions.
Recovering an AUV from under ice differs significantly from open water operations. While a slight drift from the surfacing position is acceptable in open water, precise resurfacing at the exact deployment location is crucial when operating through a small hole in the ice. One attempted solution in the Arctic, as explored in [71,170], involves using a net to capture the AUV with an acoustic beacon aiding its homing. Another strategy is employing an ROV to attach a tether to the AUV for pulling it back to the recovery hole. This ROV method was utilized for AUV recovery as described in [169] and for connecting power and data cables in [11].
Given the variability and unpredictability of ice conditions during each recovery, challenges such as acoustic shadowing, multipath effects from ice floes, and salinity fluctuations from surface ice melting can complicate the operation of recovery [58]. Notably, these near-surface conditions can compromise standard navigation and communication approaches, increasing the risk of losing a vehicle trapped beneath the ice. Hence, ensuring robust control over the AUV, regardless of any potential malfunctions, is thus essential for the safety and success of the mission.
To mitigate the risk during mission conclusion or emergency abort, vehicles are programmed to ascend for recovery cautiously, especially under ice-covered surfaces where entrapment risks are high. Even minimal ice coverage can jeopardize surface equipment like radio antennas, posing further operational challenges [23]. Addressing these concerns, Kunz et al. advocated for AUVs to maintain at a predefined depth, postponing surfacing until an explicit command is issued [58]. Wadham and Krogh introduced a “Go there and loiter” strategy, directing the vehicle to a specific location to circle at a set depth, allowing operators to decide on the subsequent actions based on surface conditions [3]. This approach ensures flexibility in surfacing locations, crucial for adapting to dynamic ice movements and enhancing AUV recovery success rates in polar missions.
For deploying and recovering AUVs from a ship in the open water, cranes are typically utilized. Bellingham et al. employed a small boat for towing the AUV from the ship to give it space for maneuvering and to facilitate recovery without risking collisions [174]. Gwyther et al. used a modified boat trailer at Davis Station’s boat ramp for deploying the nupiri muka AUV [68]. The vehicle was manually navigated through icebergs and slurry towards the Sørsdal Glacier, with the research vessel following and an inflatable boat leading to clear a path through the ice; see Figure 13. Once arrived at the calving front of the Sørsdal Glacier, the vehicle dived to a set depth and traveled into the ice cavity for exploration [175]. For recovery, the vehicle exited from the ice cavity at depth, returned to the surface in the open water beyond the ice front, and then navigated back to the nearshore launch point for retrieval. In a later season, the nupiri muka AUV was launched from an icebreaker (Korean IBRV Araon) for a series of dives near the Thwaites Glacier using a custom-designed launch and recovery system operated in the open water [69].
In summary, launching and recovering AUVs in polar regions involves unique challenges and requires specialized strategies due to the extreme environmental conditions, such as ice coverage, low temperatures, and the remote nature of these areas. This process typically involves a series of specialized strategies and considerations:
- Preparation and planning: Thorough preparation is essential, given the unpredictable nature of polar weather and dynamic ice conditions. Rigorous planning involves comprehensive analysis of ice dynamics, continuous monitoring of weather forecasts, and the development of robust contingency plans to mitigate risks during AUV missions.
- Utilizing icebreaker support: Icebreakers play a crucial role in navigating through thick ice to access designated launch sites. These vessels not only provide key logistical support but also serve as stable platforms for deploying AUVs in challenging polar environments, ensuring safe and efficient operations.
- Deployment through ice: Launching an AUV often necessitates creating openings, or leads, in the ice to facilitate entry into the water. Methods such as ice melting, cutting, or utilizing the icebreaker’s capabilities are employed to establish suitable access points for deploying the vehicle.
- Recovery operations: Retrieving an AUV from ice-covered waters presents significant challenges. Effective recovery strategies involve guiding the AUV back to a predetermined open water location or newly created lead in the ice. Techniques such as acoustic homing systems and the use of remotely operated vehicles (ROVs) are employed to ensure precise and secure recovery operations.
- Adaptation to variable ice conditions: Polar ice conditions are inherently dynamic, requiring adaptive responses to rapidly changing environments. Both AUV operators and support teams must be equipped to swiftly adjust to shifting ice formations, which can impact the timing and execution of deployment and recovery procedures.
The successful deployment, operation, and retrieval of AUVs in polar regions hinge on meticulous planning, strategic use of icebreaking capabilities, and innovative approaches to manage the challenges posed by extreme environmental conditions. Continued advancements in technology and operational methodologies are essential to enhance safety, efficiency, and the overall success of scientific research and exploration missions in these remote and demanding regions.
3.6. Risk Analysis
The Autosub under Ice Programme, sponsored by the Natural Environment Research Council (NERC) was a high-risk project, which developed the Autosub2 AUV as the enabling tool to observe ocean processes beneath ice shelves (The Story of Autosub, 2022). On February 16th, during mission 383 of the 2005 Antarctic campaign, the Autosub2 AUV became stranded 15km beneath the Fimbul ice shelf in Antarctica. Given its remote location, prospects for recovery were slim. NERC initiated an inquiry to explore potential causes of the loss and recommend strategies to mitigate similar risks in future scientific endeavors [176]. The loss of such a remarkable vehicle was not only a significant setback for the operating team but also a considerable loss for the entire field. However, the thorough investigation conducted following this incident is commendable. The transparency and public disclosure of the inquiry report is a laudable step, offering valuable lessons and insights that has undoubtedly benefited the broader AUV community.
The inquiry into the loss of Autosub 2 beneath the Fimbul ice shelf concluded that a technical systems failure, stemming from an ‘Abort Command’ triggered by a loss of power, was the cause. The report details a thorough analysis of the technical factors leading to this incident. However, the inability to physically recover the AUV for direct inspection meant that pinpointing the exact cause of the loss remained elusive. As a result, the investigation team evaluated the likelihood of various potential failure modes. Crucially, the analysis revealed that the design team lacked formally implemented procedures for reliability and technical risk assessment during the decision-making process. This absence of structured risk management protocols was identified as a significant oversight in the project’s management. The insights gained from this inquiry highlight the critical importance of integrating comprehensive risk assessment strategies into the design and development phases of AUV projects.
In preparation for the scientific expeditions beneath the Antarctic ice shelves, researchers sponsored by the Antarctic Gateway Partnership scheduled an initial trial of their AUV, nupiri muka, at the Sørsdal Glacier in East Antarctica in early 2019. To ensure the mission’s success, they organized a workshop that brought together a panel of experts to review the readiness of the AUV and the team, and to formulate recommendations and best practices aimed at optimizing data collection while minimizing risks [67]. This panel’s advice encompassed clearly defining mission objectives, employing a robust risk analysis methodology, and organizing a dress rehearsal. Additionally, a phased approach was also designed to assess the AUV’s performance and deepen understanding of the environmental challenges, thus reducing uncertainties. These measures contributed to the success of both the 2019 and 2020 missions [68,69].
Operating in the extreme conditions of polar regions, where challenges such as thick ice cover, permafrost, unpredictable climate changes, and low visibility prevail, presents significantly higher risks to both the AUVs and their operators compared to missions in open waters [177]. A review of historical incidents involving AUV losses, including those of Autosub2, SeaBED, Autonomous Benthic Explorer, Seaglider SG522, Autosub Long Range, and Hugin AUVs, reveals that many occurred during polar expeditions. The variety of causes behind these losses highlights the unpredictable and uncertain nature of AUV-related accidents in these environments [178]. This pattern of accidents, along with their often-severe consequences, underscores the vulnerability of AUV operations in such harsh conditions and emphasizes the importance of conducting thorough risk analyses before embarking on missions. Risk analysis serves as a proactive tool for identifying hazards, analyzing potential consequences, and estimating the risks of possible accidents [179]. With the growing demand for AUVs in challenging environments, pre-mission risk analysis has become crucial for informed decision-making and enhancing the safety of operations.
In the beginning, risk assessment for AUV operations relied heavily on a combination of subjective judgment and expert knowledge, supplemented by available statistical data. Griffiths and Collins thoroughly reviewed AUV reliability literature, leading to the creation of a Risk Management Process (RMP-AUV) specifically for AUV operations [180]. This process is tailored to the needs of responsible owners working with technical teams, providing a structured approach for making informed risk decisions. The RMP-AUV framework allows for a balanced consideration of both objective data and subjective evaluations regarding the importance of vehicle missions. It prescribes a methodical process for the technical team to estimate the likelihood of vehicle loss, relying on the most pertinent historical data for the AUV at hand. This ensures a comprehensive risk management strategy that incorporates both quantitative evidence and expert opinions.
Griffiths and Brito further developed a risk assessment and management framework specifically for polar AUV operations, aiming to align the risk tolerance of the mission’s responsible owner with the reliability of the AUV and its likelihood of loss under ice [181]. A key element of this process is the reliance on expert evaluation of the vehicle’s historical performance, including faults and incidents, to gauge their impact on the risk of loss. They introduced a Bayesian Belief Network approach to systematically address these considerations. This method employs a carefully structured network topology that delineates the environmental impacts on both the vehicle and the support ship, integrating these aspects to derive an overall risk profile. This approach allows for a comprehensive assessment of risk factors, blending expert insights with probabilistic modeling to inform decision-making in challenging polar exploration contexts.
Moreover, Brito et al. proposed a risk management process specifically designed for the deployment of AUVs in extreme environments, the implementation of which requires the input of expert judgment [182]. Eight leading experts in the field of AUV design and operation assessed the probability of AUV loss across 63 documented faults and incidents over 28 missions. Their collective assessments culminated in a comprehensive risk model, facilitating the calculation of overall risk estimates. This innovative approach informed the strategic decision to support the deployment of the Autosub3 AUV beneath the Pine Island Glacier in the Amundsen Sea, Antarctica, in 2009 [48].
Brito and Griffiths employed a state transition approach utilizing a Markov chain to evaluate the reliability of AUVs [183]. This method traced the AUV’s journey from pre-launch through operation and finally to recovery, delineating 11 distinct stages. It incorporated statistics on survival probabilities during transit, accounting for the variable distances covered. This approach enabled the calculation of the probability of success at each stage and through each transition, offering a comprehensive view of the overall mission’s likelihood of success. By integrating empirical data with expert analysis, the study showcased the application of this model through a detailed examination of the Autosub3 AUV’s historical performance, providing invaluable insights for optimizing AUV operations across various mission phases.
Brito and Griffiths addressed the complexity of assessing AUV mission risks across a wide range of scenarios by introducing a method that relies less on extensive expert panel reviews for each potential situation [184]. They proposed an approach based on a Bayesian Belief Network, utilizing expert judgments as the basis for setting initial probabilities of mission failure. This model distinctly maps out the environmental impacts on both the AUV and its support platform, integrating these effects to update the overall risk of failure. This technique expands the utility of expert assessments, applying them across various conditions without necessitating repeated, specific expert input for each new scenario. This advancement offers a systematic and well-founded strategy for managing the risks associated with AUV operations in challenging environments, enhancing the safety and reliability of these critical missions.
Loh et al. introduced a novel approach to risk analysis for AUV missions, addressing the limitations of traditional methods that often overlook the impact of organizational, human factors, and the intricate interplay of risk variables [185]. Their method, a hybrid fuzzy system for dynamical risk analysis (FuSDRA), incorporates system dynamics to map out the complex relationships between different risk factors over time, while employing fuzzy logic to manage inherent uncertainties. By applying this model to a real-world Antarctic AUV program, they showcased how it can provide insightful risk control recommendations, thus offering a practicable tool for managing the multifaceted risks associated with AUV operations.
Chen et al. conducted a systematic review of risk analysis study focused on enhancing the safety of AUV deployments [178]. They identified critical risk factors across technical, human, and environmental categories and explored the causal relationships impacting AUV operations. The study also offered a comparative analysis of various risk analysis methods, distinguishing them into qualitative, semi-quantitative, and quantitative approaches. Notably, quantitative methods have become increasingly significant for improving the accuracy and managing the uncertainties of risk estimation. The authors advocate for further research into dynamic risk analysis, strategies to overcome the scarcity of historical data, the application of intelligent risk analysis techniques, and the exploration of risk analysis for multi-vehicle operations, marking critical directions for enhancing AUV deployment safety.
The methods mentioned above aim to support human operators in making decisions rather than being incorporated into an AUV’s autonomous decision-making process in real-time. To enhance mission success and performance, there is a pressing need for improved situational awareness and decision-making capabilities within AUVs. A promising approach to address this challenge is the implementation of online risk management through supervisory risk control [186]. Utne et al. defined supervisory risk control as the integration of risk management capabilities into control systems to enhance the decision-making and intelligence of autonomous systems [187]. Effective risk management involves a comprehensive process of risk assessment, ongoing monitoring, control measures, and subsequent follow-up actions [188], ensuring that autonomous systems can safely and efficiently navigate complex environments.
Bremnes et al. introduced an approach for intelligent risk-based under-ice altitude control using a Bayesian network for online probabilistic reasoning over the current risk state, which varies from low to high during operations [189]. By leveraging in-situ sensor data, the model applies evidential reasoning to update the risk state’s posterior probability distribution online. Furthering this concept, Bremnes et al. proposed a framework for supervisory risk control in AUV under-ice operations [186]. This framework integrates a decision network with a Bayesian network, enabling the AUV to autonomously adjust its behavior based on its current risk assessment. This advancement aims to equip the control system with risk management capabilities, enhancing AUV performance and increasing the likelihood of successful missions.
Yang and Utne identified criteria essential for developing online risk models for autonomous marine systems (AMS), serving as a guide for evaluating and refining analysis outcomes [190]. Building on this, Yang et al. integrated System-Theoretic Process Analysis (STPA) with Bayesian Belief Networks (BBNs) to create dynamic risk model for AMSs [191]. The proposed risk model updates in real time with changing operational conditions, offering a basis for supervisory risk control with AMS. Simulation studies demonstrated that this model effectively informed the AUV about current risk levels, enabling it to execute risk-informed decisions, thereby enhancing its operational intelligence and safety.
In summary, effective risk management for polar AUVs is crucial for the safety of both the equipment and the personnel involved, as well as for the success of the scientific missions they undertake. Risk management for AUVs operating in polar regions involves addressing unique challenges posed by extreme and dynamic environmental conditions. Key aspects include:
- Environmental assessment: Regular assessment of ice conditions, weather patterns, and water characteristics is essential to mitigate risks associated with the unpredictable nature of polar environments. Continuous monitoring enables proactive adjustments to operational plans based on real-time data.
- Robust design and testing: AUVs must be carefully designed to withstand extreme cold, high pressures, and potential interactions with ice formations. Rigorous testing under simulated polar conditions ensures the reliability and durability of AUV systems before deployment in the field.
- Emergency protocols: Developing comprehensive emergency procedures is critical for handling scenarios such as AUV entrapment under ice, loss of communication, or equipment failures. Regular drills and rehearsals help maintain readiness and ensure swift and effective responses in crisis situations.
- Data and power backup systems: Integration of redundant systems for data storage and power supply is vital to maintain operational integrity in the event of system failures. Backup systems minimize disruptions and enhance the AUV’s resilience during missions.
- Real-time monitoring: Continuous monitoring of AUV operational parameters and environmental conditions allows for timely decision-making and proactive adjustments to mission strategies. Real-time data analysis facilitates early detection of potential issues, enabling swift corrective actions.
- Team training and preparedness: Ensuring that expedition teams are well-trained in AUV operations, emergency response protocols, and familiar with the specific challenges of polar regions is crucial. Competency in handling AUV operations under challenging conditions enhances overall mission safety and effectiveness.
- Risk analysis: Conducting thorough risk analysis throughout all phases of the mission—from planning to execution and post-mission assessment—helps identify, assess, and mitigate potential risks. This proactive approach ensures continuous improvement in risk management strategies and enhances overall mission safety.
There is a growing emphasis on risk analysis and management to ensure the success of AUV missions in polar operations. As technological and operational methodologies continue to advance, enhancing risk mitigation strategies becomes crucial for promoting sustainable exploration and research in these challenging environments.
4. Capabilities and Applications
Polar AUVs represent a critical tool in expanding our understanding of the polar regions, offering unparalleled abilities to explore and monitor these remote and often inaccessible areas, contributing significantly to various scientific and research endeavors. This section provides a summary of the diverse capabilities of AUVs as demonstrated in representative polar applications. These capabilities encompass a range of critical functions such as under-ice mapping and measurement, water sampling, ecological investigation, seafloor mapping and surveillance networking; see Figure 14.
4.1. Under-Ice Mapping and Measurement
The UARS AUV’s deployment in the Arctic’s Beaufort Sea marked a pioneering venture into polar AUV exploration, significantly advancing our understanding of underwater ice surface topography. This trailblazing mission achieved the collection of over 200,000 position-correlated profile measurements of under-ice surface elevations, unveiling the depth of pressure ridge keels to exceed 75 feet [29]. UARS’s precise acoustic beams and stable operation enabled the high-resolution mapping of underwater ice surface, proving invaluable for a broad spectrum of under-ice operations. These ranged from acoustic measurement initiatives and bathymetric surveys to messenger line laying and fundamental oceanographic research, establishing a versatile application scope for UARS technology in polar exploration.
Subsequently, a range of AUVs were deployed in both the Arctic and Antarctic regions, primarily focused on underwater ice topography mapping along with under-ice water properties measurements, such as the Odyssey II AUV, the ALTEX AUV, the Autosub series AUV, the SeaBED AUV, the Explorer series AUV and so on [1,33,40,41,69]. These missions, for instance, were instrumental in expanding our understanding of the interactions between ice and ocean.
Representative AUV deployments for under-ice mapping and measurement, as well as their significant scientific findings are summarized as follows: The Autosub 2 AUV, under the support of the Autosub Under Ice Program, embarked on an Antarctic mission to the Fimbul Ice Shelf, capturing the first acoustic images of an ice shelf’s base [41]. This exploration unveiled a highly variable oceanographic landscape beneath the ice, characterized by an irregular ice base and cavities periodically flushed with water warmer than the surface’s freezing point [4]. During early spring voyages (IceBell and SIPEX II), the SeaBED AUV mapped sea-ice drafts across three Antarctic coastal regions. The resulting ten floe-scale maps exposed extensive deformation, revealing a mean sea ice draft significantly greater than what drilling data typically shows [60]. Furthermore, the deployment of the nupiri muka AUV to the Sørsdal Ice Shelf in East Antarctica uncovered the presence of cold, salty waters and a deep seafloor trough at the shelf’s entrance, indicating a frigid oceanic setting with low melt rates [68].
4.2. Water Sampling
During Mission 382 beneath the Fimbul Ice Shelf in East Antarctica, the Autosub 2 AUV was equipped with a compact water sampler designed by AquaLab. This innovative device, integrating a mechanical syringe mechanism, enabled the collection of water into 49 EVA plastic bags through a rotary valve [23]. The sampler was specifically developed to facilitate a broad spectrum of water property analyses during the mission. However, it’s worth noting that while the samples are well-suited for tracer and nutrient studies, they are not ideal for trace gas measurements due to the gas-permeable nature of the EVA bags.
The water sampler’s design allows for both autonomous operation, where samples are collected at pre-set intervals, and mission-specific activations, enabling sample collection at designated locations. The Autosub 2 can perform a holding pattern during sample collection, resuming its mission only after the sampler confirms the completion of the process. This versatile sampling capability has already proven its worth; samples collected have been used for oxygen isotope ratio and barium concentration analysis at the entrance of an East Greenland fjord [192]. These samples, of quality comparable to those obtained via traditional lowered rosette samplers, underscore the effectiveness of employing the AquaLab water sampler aboard an AUV for scientific investigations.
In the 2013 Arctic expedition conducted in the Fram Strait, the PAUL AUV was outfitted with an array of sensors and a water sample collector as part of its scientific payload. This equipment configuration aimed to explore the intricate dynamics between physical and ecological processes in small-scale along a moving ice edge and its adjacent meltwater front [63]. Specifically, for this expedition, water samples were utilized solely for the calibration of the nitrate sensor and for translating the analog outputs of the C7-c fluorometer into measurable chlorophyll a concentrations, providing valuable insights into the area’s ecological conditions.
In 2020, the nupiri muka AUV made significant strides during its West Antarctica missions, achieving the first-ever measurement of warm water inflow and securing 46 trace-metal free water samples from beneath the Thwaites Glacier. This unique collection was devoid of metal contaminants commonly found in samples collected via ships or boats, providing pristine data for analysis [69]. In addition, as part of the Thwaites Glacier expedition under the TARSAN project, in 2022 the University of Gothenburg’s Hugin AUV successfully retrieved water samples while mapping the underside of the ice using multibeam sonar [56].
In 2023, Hwang et al. explored an adaptive sampling technique using the Memorial University’s Explore AUV, specifically tailored to monitor a hydrocarbon plume within the water column [193]. Their research, conducted in Baffin Bay and depicted in Figure 15, highlighted the effectiveness of the backseat drive operating system in achieving mission objectives. The AUV successfully retrieved water samples from depths of 20 m, 50 m, and 200 m, marking a significant step forward in autonomous environmental monitoring. The multi sampling system, crafted by KC-Denmark, incorporates eight syringes that collect water through an external hose system. An actuator, governed by the AUV’s payload computer, controls the syringe plungers, ensuring precise sample collection.
4.3. Ecological Investigation
In their groundbreaking study in 2002, Brierley et al. utilized the Autosub 2 AUV to survey Antarctic krill populations beneath sea ice. They discovered that krill were highly concentrated in a zone extending 1 to 13 kilometers south of the ice edge. Remarkably, within this under-ice band, the krill densities were found to be five times greater than those in open water. The under-ice realm has always been acknowledged as a critical habitat for krill, yet the challenge of sampling in these regions had hindered direct observation and accurate density estimation over the necessary scale. The deployment of Autosub 2 revolutionized this research, enabling the team to conduct continuous, high-resolution measurements of krill density, penetrating as far as 27 kilometers beyond the ice edge [9]. This technological advancement provided unprecedented insights into the under-ice ecology of Antarctic krill.
During the 2013 Arctic expedition in the Fram Strait, the PAUL AUV covered two cross-front transects, each extending 9 km, generating detailed vertical profiles of both physical and biogeochemical parameters, from the surface down to 50 meters depth [64]. The collected data unveiled a complex structure within the water column, characterized by physical variations and biogeochemical diversity. Notably, the spatial distribution of phytoplankton biomass, as indicated by chlorophyll a concentrations, and nutrient levels showed marked heterogeneity. From these observations, researchers were able to delineate three distinct zones within the transects, each exhibiting unique biogeochemical traits, showcasing the AUV’s capability in enhancing our understanding of polar ecological environments.
4.4. Seafloor Mapping
Seafloor mapping in ice-covered areas provides essential geospatial context, similar to its function in open waters. This includes crucial data for navigational safety of surface and underwater vessels, facilitating the exploration of the uncharted seabed, defining continental shelf boundaries, studying benthic ecosystems, and tracing deep-sea currents that influence global heat distribution [98]. It also enhances understanding of geological and tectonic activities, evaluates natural hazard risks such as submarine landslides and gas seeps, uncovers maritime heritage sites, and aids in forecasting tsunami and storm surge impacts.
In 2010, Natural Resources Canada utilized an ISE Explorer AUV in the high Arctic for under-ice bathymetric surveys, aiming to support Canada’s submission for extending its continental shelf boundaries under Article 76 of the United Nations Convention on the Law of the Sea (UNCLOS). The mission achieved nearly 1000 km of under-ice surveying, encompassing the AUV’s launch, operation from a remote camp, and subsequent recovery. Achieving depths of 3160 m, the AUV maintained an average speed of 1.5 m/s while traveling 130 m above the seabed. Lasting 12 days, this mission set new records in continuous operation, distance covered, and operational challenges for under-ice AUV endeavors. Unlike standard multibeam sonar surveys that provide overlapping, comprehensive coverage, this particular mission yielded only sparsely spaced survey lines.
AUVs have significantly contributed to mapping various seafloor landscapes beneath ice shelves [194]. A prime example is the use of the Autosub 3 AUV for exploring the Pine Island Glacier’s retreat in West Antarctica [48]. Across six missions, the AUV traversed 510 km under the ice shelf, extending up to 50 km from the ice front, over a 94-hour period. Multibeam sonar data uncovered a transverse ridge at 700 m depth between the current ice front and grounding line, indicating a historical grounding line. In addition, the vehicle also collected valuable data on the seawater’s physical, chemical and biological properties beneath the ice. This exploration not only provided unprecedented insights into the mechanisms of ice loss from this critical area and its implications for global sea level and ecological variation, but also resulted in an extensive seafloor mapping dataset beneath an ice shelf for palaeogeological studies. Following this research, Graham et al. further investigated the seafloor using the same AUV, mapping seafloor ‘corrugations’ and iceberg plough marks across the transverse ridge identified earlier [195]. Their data played a key role in evaluating different theories regarding the origin of these corrugations, offering significant insights for reconstructing the ice shelf’s history in the Holocene period.
Dowdeswell et al. deployed the Autosub 2 AUV for detailed mapping of glacial bedforms at a depth of 840 m within Kangerlussuaq Fjord, where the sediment is predominantly sourced from icebergs calving from the fast-flowing Kangerlussuaq Glacier [23,196]. This study confirmed that the Greenland Ice Sheet spanned the entire fjord system during the Last Glacial Maximum. A novel aspect of this mission was the integration of a digital camera system aboard the AUV, which, operating at altitudes of less than 10 meters above the seabed, was able to capture high-resolution imagery of ice-rafted debris such as dropstones, as well as a wide variety of benthic life forms, thus contributing valuable visual data to the study of seabed processes in glacially influenced marine environments.
4.5. Surveillance Networking
Beyond its scientific importance, the Arctic region’s escalating strategic and geopolitical relevance, driven by enhanced accessibility due to climate change, is drawing increased attention from commercial and military forces, especially naval powers. Navies are seeking to significantly enhance their situational awareness and operational capabilities in this region.
The US Navy is developing an Arctic surveillance network, known as the Arctic Mobile Observing System (AMOS), under the management of the Office of Naval Research (ONR). This project aims to deploy a comprehensive array of unmanned undersea vehicles (UUVs), including fully autonomous types, complemented by fixed sensors. These elements are intended to be linked through communication and data-sharing nodes anchored beneath surface buoys on the ice. Designed for year-round operation, AMOS aspires to maintain a sensing reach of up to 100 km from its central hub, supporting seamless two-way communication between the underwater vehicles, nodes, and mainland command centers [197].
The primary public goal of the AMOS program is to enhance monitoring and assessment of under-ice conditions in the Arctic over wide areas. Driven by receding ice and environmental changes due to climate change, this initiative aligns with increased U.S. military presence in the region. AMOS is focused on enhancing insights into activities both above and beneath the surface. It reflects broader Navy efforts to develop advanced underwater sensor networks, incorporating fixed nodes and unmanned vehicles, for widespread monitoring of submarine and maritime movements in the open oceans.
In brief, as global climate change increases accessibility to the Arctic region, competition there is expected to intensify in the near future. This will open up a range of new economic opportunities, including tourism, the exploitation of natural resources such as oil and fish, as well as the development of profitable maritime shipping routes. It is imperative to collaborate with the Inuit Circumpolar Council and other Indigenous groups to ensure research and initiatives proceed in a manner respectful and beneficial to the Indigenous peoples of the region.
5. Discussion and Future Outlook
The future development and deployment of polar AUVs are promising, with significant advancements and expanded applications anticipated. These advancements are driven by technological innovations and the increasing importance of polar regions in global environmental studies and geopolitics. Key trends and projections for the future outlook of polar AUVs include:
- Enhanced technological capabilities: Continuous advancements in AUV technology are expected to yield more robust, efficient, and versatile vehicles. Innovations in battery life, propulsion systems, and miniaturization will enable longer, more complex missions, extending the operational range and capabilities of AUVs in polar environments. These improvements will facilitate more comprehensive and sustained data collection efforts, allowing for extended deployments and reducing the need for frequent retrieval and maintenance. Additionally, the development of modular AUV designs will enable the customization of vehicles for specific missions, enhancing their adaptability and performance across various research and commercial applications [79,81].
- Improved navigation and communication: Innovations in under-ice navigation and communication systems are crucial for operating in the challenging polar environment. Enhanced navigation technologies, such as advanced INS and USBL systems, will provide more accurate motion control. Concurrently, developments in communication technology, especially the acoustic approach, will ensure reliable data transmission between the AUV and the control center, thus improving mission success rates [99]. The integration of real-time data processing and transmission capabilities will enable scientists to monitor and adjust AUV missions dynamically, enhancing the precision and effectiveness of data collection.
- Versatile data collection: Future AUVs will be equipped with a wide array of sensors and instruments designed for comprehensive data gathering in remote polar regions. These capabilities will include under-ice surveys, oceanographic measurements, biological sampling, chemical analysis, seafloor mapping, acoustic surveys, and visual observations. The integration of multi-modal sensors will enhance the ability to monitor and study the polar environment comprehensively. For instance, advanced imaging systems combined with environmental DNA (eDNA) sampling technologies will provide detailed insights into the biodiversity and health of polar ecosystems [198].
- Autonomy and AI integration: The integration of artificial intelligence (AI) and machine learning technologies will significantly enhance the autonomy of AUVs. These advancements will enable AUVs to make independent decisions during missions, adapting to dynamic environments and optimizing data collection processes. Enhanced autonomy will not only improve operational efficiency but also ensure higher-quality data collection, reducing the need for human intervention [193]. AI-driven algorithms will allow AUVs to identify and respond to anomalies or changes in the environment, ensuring the collection of relevant and high-priority data.
- Increased accessibility and operational safety: As AUV technology becomes more user-friendly and cost-effective, it will become accessible to a broader range of users, including academic institutions, research organizations, and commercial enterprises. Improved safety features and user interfaces will facilitate safe operations in hazardous polar environments, minimizing the risks associated with under-ice missions [178]. The development of standardized training programs and operational protocols will further enhance the safe and effective use of AUVs, ensuring that even less experienced operators can conduct successful missions.
- Collaborative and networked operations: The future will see an increase in the use of AUV swarms or coordinated missions involving multiple AUVs. These networked operations will provide broader coverage and more diverse data sets, enhancing the overall understanding of the polar environment. Collaborative missions will leverage the strengths of individual AUVs, allowing for more efficient and comprehensive data collection. Swarm intelligence and distributed computing techniques will enable AUVs to coordinate their activities autonomously, optimizing their collective performance and resilience in dynamic environments [199].
- Increased focus on climate change research: Polar AUVs will play a critical role in climate change research as the effects of global warming become more pronounced. These vehicles will be instrumental in monitoring ice melt, sea-level rise, and changes in marine ecosystems. The data collected by AUVs will provide valuable insights into the impacts of climate change on polar regions, informing mitigation strategies and policy decisions [200]. Long-term monitoring programs will enable scientists to track temporal changes in the polar environment, enhancing our understanding of climate dynamics and their global implications.
- Broader scientific and commercial applications: Beyond environmental research, polar AUVs are likely to find applications in resource exploration, environmental monitoring, and mitigation, as well as support for commercial and military shipping in newly accessible polar routes. The versatility and advanced capabilities of future AUVs will drive their adoption across various sectors, contributing to the sustainable management and utilization of polar resources. For example, AUVs equipped with geophysical survey instruments will facilitate the exploration of mineral and hydrocarbon resources, while environmental monitoring missions will ensure the responsible development and protection of these regions [201].
- Global collaboration and policy development: The strategic importance of polar regions is expected to rise, leading to increased international collaboration and policy-making regarding the deployment and use of AUVs in these areas. Collaborative efforts will involve partnerships with Indigenous communities, governments, and international organizations, promoting the sustainable management of polar environments and ensuring equitable access to polar research opportunities [202]. The establishment of international agreements and regulatory frameworks will be essential to harmonize AUV operations, safeguard environmental integrity, and address geopolitical considerations in the polar regions.
Overall, the future of polar AUVs is marked by technological innovation, expanded research and commercial applications, and enhanced international collaboration. These developments will deepen our understanding of polar environments and promote their sustainable management, contributing to global efforts to address environmental challenges and leverage the opportunities presented by the polar regions. As AUV technology continues to evolve, it will play a pivotal role in advancing our knowledge of the polar frontiers and supporting the sustainable stewardship of these critical ecosystems.
6. Summary and Conclusions
This study conducts a thorough review of the historical advancements in polar AUVs, synthesizing past experiences and providing guidance for future developments and applications. It extensively explores the history of notable polar AUV deployments worldwide, based on available publications. The review identifies and examines the key technological challenges faced by polar AUVs, including navigation, path planning, obstacle avoidance, communication, energy, launch and recovery methods, and risk analysis. The study also categorizes typical capabilities and applications of AUVs in polar environments, such as under-ice mapping and measurement, water sampling, ecological investigation, seafloor mapping, and surveillance networking. Additionally, it briefly highlights existing research gaps and potential future challenges in this evolving field.
There have been over 70 propeller-driven AUV expeditions in the Arctic and Antarctic regions, as per publicly available literature. Over half of these deployments occurred in the Arctic, attributed to its relatively easier accessibility. The Beaufort Sea emerged as a significant area of focus in Arctic research, while in the Antarctic, AUVs were more frequently deployed in west Antarctica. The leading efforts on polar AUV deployments mostly come from western countries, involved in well-planned national or international scientific programs and initiatives.
Polar AUV technology faces several key challenges, primarily due to the harsh and dynamic conditions of polar environments. Addressing these challenges is crucial for successful operations and data collection. Electromagnetic signals are unavailable under ice, making navigation and communication challenging. Acoustic methods are often used, but they have limitations in range, accuracy and data rate. Detecting and avoiding ice from below is critical. AUVs must have advanced sensing and path-planning capabilities to navigate safely in an environment with moving ice. Polar missions can be lengthy and may require AUVs to operate for extended periods without recharging. This necessitates high-energy-efficiency systems and potentially innovative power solutions. The presence of ice significantly complicates the launching and recovering of AUVs, requiring specialized equipment and strategies. Due to the remote and hazardous nature of polar regions, ensuring the safety of the AUV and support crew is paramount, necessitating robust risk management strategies. Overcoming these challenges requires continuous technological advancements, innovation in design and operation, and comprehensive risk assessment and management strategies.
The polar AUV missions primarily address scientific questions related to sea ice and oceans, ice shelves, biology, geology, and geophysics. A critical role of AUVs in these missions is ice mapping, which is essential for assessing the extent of polar ice and its variations, thereby enhancing our knowledge of the interactions between oceans and ice, as well as contributing valuable insights into global environmental changes. As the Arctic environment “heats up” both literally, with the melting of sea ice, and figuratively, with rising geopolitical tensions, navies are seeking to significantly enhance their situational awareness and operational capabilities in this region. Broader Navy efforts are to develop advanced underwater sensor networks, incorporating fixed nodes and unmanned vehicles, for widespread monitoring of submarine and maritime movements in open oceans. Lastly, recognizing the changing awareness in relation to the Indigenous peoples of the world, it is crucial that in the spirit of truth and reconciliation, that future research, missions, tourism, commercial development and more is conducted in collaboration with and with the support of the Indigenous peoples of the Arctic regions.
Year-round access to all depths of polar regions is a crucial objective for global ocean observation, management, and environmental protection efforts. Achieving this requires substantial improvements in extending the capabilities of under-ice robotic systems, including the reach of depth, navigation accuracy, data transmission efficiency, and operational endurance. The future of polar AUVs is marked by technological innovations, expanded research and commercial applications, and enhanced international collaboration. These developments collectively will contribute to a deeper understanding and responsible stewardship of the polar regions.
Author Contributions
Conceptualization, S.F. and N.B.; methodology, S.F.; formal analysis, S.F.; investigation, S.F. and Z.L.; resources, S.F. and N.B.; data curation, S.F. and Z.L.; writing—original draft preparation, S.F.; writing—review and editing, S.F. and N.B.; visualization, S.F., N.B. and Z.L.; supervision, N.B.; project administration, S.F. and N.B.; funding acquisition, S.F. and N.B. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Natural Science Foundation of China (Grant No. 52371357) and the National Key Research and Development Program of China (Grant No. 2023YFC3008000), to the first author. Financial support also came from the Natural Sciences and Engineering Research Council of Canada Discovery Grant programme to the second author (Grant No. RGPIN-2021-02506).
Acknowledgments
The authors would like to express their sincere gratitude to the institutions and individuals who permitted the use of the cited figures.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A

Table A1.
Notable Polar AUV Deployments in Polar Regions.
| No. | Time | Vehicle | Location | Institute/Program/Sponsor | Duration and range | Outcomes | Reference |
|---|---|---|---|---|---|---|---|
| 1 | 1972 | UARS | Beaufort Sea, Arctic | APL, ARPA-ONR | The AUV ran in excess of 17 miles for more than 4 hours. | Provided the most complete, directly correlated measurements of underwater ice topography ever made. | [29] |
| 2 | 1992 | ACTV | Beaufort Sea, Arctic | APL, Lead Experiment | 20 runs were made around 4 leads, for almost 4.5 hours. | Obtained the first measurements of temperature, salinity and turbulence under and around leads. | [30] |
| 3 | 1994 | ACTV | Eastern Weddell Sea, Antarctic | APL, Antarctic Zone Flux Experiment | Run 1-2 km tracks at different depths. | Measured the temperature and salinity of the upper ocean responded to a series of storms. | [32] |
| 4 | 1998 | ACTV, AMTV | Beaufort Sea, Arctic | APL and WHOI, Surface Heat Balance of the Arctic Ocean program | 44 runs adding up to 70 km of run track were gathered. | Collected temperature and salinity profiles to estimate heat and salt fluxes under varying surface conditions. | [32] |
| 5 | 1994 | Odyssey II | Beaufort Sea, Arctic | AUV Lab, MIT, Arctic Sea-Ice Mechanics research program, MIT Sea Grant and ONR | The vehicle performed a series of “out-and-back” missions, and generated preliminary maps. | Measured the topography of the ice canopy to study transient events in the ice. | [33] |
| 6 | 1996 | Theseus | Canadian Arctic | ISE and DREA, Canadian Department of National Defence | The vehicle completed a 320 km under ice transit, establishing an AUV endurance record of over 60 hours—all under ice. | Laid an optical fiber cable stretching up to 220 km in the ice-covered Arctic Ocean. | [36] |
| 7 | 2001 | ALTEX (Dorado) | Fram Strait, Arctic | MBARI, Atlantic Layer Tracking Experiment, NSF and ONR | Three days of under-ice operations resulted in the collection of plentiful multikilometer long sections of ice draft. |
Gathered data on the warm Atlantic Layer water mass flowing into the Arctic Ocean via the Fram Strait. | [40] |
| 8 | 2001 | Autosub 2 | Northern Weddell Sea, Antarctic | British Antarctic Survey and NOC, Autosub Under Ice program, NERC | There were more than 20 missions in total that collected over 690 km of data, 485 km being beneath sea ice (including 210 km for krill survey). | Measured Antarctic sea ice thickness, surveyed beneath different types of icebergs, and assessed the abundance of Antarctic krill. | [9,43] |
| 9 | 2002 | Maridan MARTIN 150 | Off the coast of East Greenland, Arctic | University of Cambridge, EU CONVECTION program | The total track length of 4.6 km from two runs were reported. | Captured the first 2D imagery of multi-year ice using a sidescan sonar, together with the CTD and ADCP data. | [45] |
| 10 | 2004 | Autosub 2 | Off NE Greenland, Arctic | University of Cambridge, Autosub Under Ice program, NERC | 458 km of high-quality multibeam sonar images and oceanographic data were collected. | Obtained the first successful swath sonar images under sea ice, and collect systematic measurements of the water and the seabed beneath the ice | [41] |
| 11 | 2005 | Autosub 2 | Under the Fimbul Ice Shelf, Antarctic | British Antarctic Survey and NOC, Autosub Under Ice program, NERC | The vehicle ran a simple in and out mission that took it some 25 km into the cavity under the ice shelf. | Revealed the topographic and oceanographic conditions beneath ice shelves | [4] |
| 12 | 2009 | Autosub 3 | Pine Island Glacier, Antarctic | British Antarctic Survey and NOC, Autosub Under Ice program, NERC | The AUV undertook six missions and covered in total 510 km under the PIG. | The data indicated the glacier used to ground on a seafloor ridge, but its retreat has led to warm water entering and quickly melting the upstream ice. | [48] |
| 13 | 2014 | Autosub 3 | Pine Island Glacier, Antarctic | British Antarctic Survey and NOC, Ice Sheet Stability program | The AUV covered 460 km of track beneath PIG ice shelf. | Provided observations of temperature, salinity, velocity, turbulent kinetic energy dissipation rate, and thermal variance dissipation rate under the ice shelf, giving confidence in previous estimates of basal melting. | [49] |
| 14 | 2018 | ALR | Filchner-Ronne Ice Shelf, Antarctic | British Antarctic Survey and NOC, Ice Sheet Stability program | The ALR navigated under the ice shelf for over three days, covering more than 25 km in regions where the ice was over 500 m thick. | Made direct measurements of the hydrology as well as the ice shelf and sea bed morphology. | [50,51] |
| 15 | 2022 | ALR | Thwaites Glacier and Dotson Ice Shelves, Antarctic | Science agencies of the UK and USA, TARSAN and Ocean Alliance of NOC | ALR AUV travelled more than 40 km under the shelf. | Measured currents, turbulence and other water properties like temperature and salinity to investigate the factors driving ice loss from the glacier. | [56] |
| 16 | 2019 | Ran (Hugin) | Thwaites Glacier, Antarctic | Science agencies of the UK and US, NERC and NSF Office of Polar Programs as part of the ITGC | The AUV undertook short excursions within 10 km under ice shelf, collecting around 13 km2 of new geophysical data over a 19 h mission across an isolated sea-floor promontory. | Produced the most detailed seafloor maps ever made of the region, and gather data on ocean conditions and currents. | [53,54] |
| 17 | 2022, 2024 |
Ran (Hugin) | Thwaites Glacier and Dotson Ice Shelves, Antarctic | Science agencies of the UK and US, TARSAN and Ocean Alliance of NOC | The vehicle tasked with 20-hour missions at two key sites. Some explorations were under the 200-500 m thick ice. | Integrated sea-floor mapping with mid-water column profiling and sampling into mission programs. | [56,57] |
| 18 | 2007 | SeaBED Jaguar and Puma | Gakkel Ridge in the Arctic Ocean | WHOI, Arctic Gakkel Vents Expedition, NSF Office of Polar Programs and NASA ASTEP program | The two AUVs made nine deep dives during the the expedition. The longest mission lasted over 30 hours and dived up to 4000 m water depth. | Marked the first instance of AUVs with deployment and recovery through ice into the deep ocean (over 3,500 m) for scientific research. | [58] |
| 19 | 2010 | SeaBED | Weddell and Bellingshausen Seas, Antarctica | British Antarctic Survey, UK-led ICEBell voyage, UK National Environmental Research Council | The SeaBED AUV specializes in single floe-scale sea ice measurements up to 500 m × 500 m. The missions resulted in ten floe-scale sea-ice draft maps collected in three different coastal regions around Antarctica. | Enabled the first-ever coincident high-resolution 3D mapping of both upper and lower surfaces of Antarctic sea ice, revealing extensive deformation and a mean sea ice draft significantly greater than typically observed in drilling data. | [20,60,61] |
| 20 | 2012 | East Antarctica | University of Tasmania, Australian-led SIPEX II, Antarctic Climate and Ecosystems Cooperative Research Center | ||||
| 21 | 2009, 2010, 2011, 2012, 2013 | PAUL (Bluefin) | At the edge of a large ice tongue in the Fram Strait, Arctic | AWI, HGF-Research Program PACES and Helmholtz Alliance ROBEX | The AUV traversed two cross-front sections of 9km between 0 and 50 m water depth at a horizontal station spacing of 800-1000m. | Captured detailed vertical profiles of physical and biogeochemical properties at a moving ice edge. | [64] |
| 22 | 2010 | ISE Explorer | Canada’s high Arctic | ISE, NRCan | The AUV operated for 10 days under the ice, conducting approximately 1000 km of under-ice survey over the course of three missions. | Conducted under-ice bathymetric surveys. | [11,65] |
| 23 | 2019 | nupiri muka | Sørsdal ice shelf in East Antarctica | University of Tasmania, Antarctic Gateway Partnership, Australian Research Council | Nine missions were conducted along the calving front, with two missions beneath the ice shelf | Measured temperature, salinity, and water currents and revealed the presence of cold, salty water under the ice shelf and a deep seafloor trough at the shelf’s entrance. | [68] |
| 24 | 2020 | nupiri muka | Thwaites Glacier in West Antarctica | University of Tasmania, Antarctic Gateway Partnership, Australian Research Council | Six missions were completed including a significant 60-kilometer round trip along the seabed beneath a sea-ice barrier | Mapped the influx of warm water and collected 46 trace-metal free water samples. | [69] |
| 25 | 2007 | Gavia | Beaufort Sea, Arctic | University of Cambridge, SEDNA project, NSF Office of Polar Programs | The vehicle was tethered by a 400m Kevlar line during the missions. A series of sonar swathes (over 200 m long, 80 m width) were collected. | The first 3D digital terrain mapping of the underside of sea ice was conducted by an ice-launched AUV. The interferometric sonar imagery revealed morphological distinctions between first-year and multi-year ice undersides. | [72] |
| 26 | 2008 | Gavia | Lincoln Sea, Arctic | University of Cambridge, DAMOCLES project, European Union 6th Framework Program | 24 tethered missions were completed within an area of 500 m × 500 m. | Mapped the ice draft in the local area with the Geoswath unit, measured the water profiles with the CTD module, and investigated the horizontal variability of light transmission under sea ice with a hyper-spectral radiometer. | [70,71] |
| 27 | 2011 | Gavia | Lancaster Sound and Baffin Bay, Arctic |
University of British Columbia, Canadian ArcticNet program, Canadian Ice Service | The AUV mapped a roughly 700 m × 500 m area of the underside of PII-B. | The AUV’s mapping of the underside of PII-B, together with a surface vessel’s sidewall survey, resulted in a 3D terrain map of the ice island’s submerged section. | [74] |
| 28 | 2010 | REMUS-100 | Ny-Alesund, Svalbard, Norway, Arctic | University Centre on Svalbard, Norwegian Research Council-funded projects | AUV missions were surveyed a transect of 1.5 km at different depths during day and night. | Detected the bioluminescence among zooplankton during the polar night using a bathyphotometer. | [75] |
| 29 | 2010 | REMUS-100 | Offshore of Barrow, Alaska, Arctic | WHOI, grant from Ocean and Climate Change Institute, Richard B. Sellars Foundation | Both tethered test missions and untethered survey missions were conducted, including a survey in a “mow the lawn” pattern centered on the ice floe, featuring three 400 m along-floe lines at a depth of 6 m. | Acquired cross-shore hydrographic profiles, detailing variations in temperature, salinity, and velocity at different depths. | [76] |
| 30 | 2014 | REMUS-100 | Ny-Alesund, Svalbard, Norway, Arctic | NTNU, Centre for Research-based Innovation SAMCoT, Centre of Excellence AMOS, KMB Arctic DP, Research Council of Norway |
During the cross-fjord survey, the vehicle traveled over 16 h and more than 88 km. | Used for sea-floor mapping and collection of oceanographic parameters. | [77] |
| 31 | 2020, 2022 | Icefin | Thwaites Glacier, Antarctic | Georgia Institute of Technology, MELT project, International Thwaites Glacier Collaboration | The vehicle conducted a 15 km round-trip mission. | Marked the first vehicle to explore the grounding line of Thwaites Glacier, gathering crucial environmental data, along with sonar and optical imagery. | [79] |
| 32 | 2016 | RAIV | Chukchi Sea, Arctic | JAMSTEC, Arctic Challenge for Sustainability | --- | Succeeded in autonomous navigation under ice in the Arctic Ocean for the first time in Japan, measure salinity and temperature of sea water, and capture images under sea ice | [82,83] |
| 33 | 2021 | COMAI | Chukchi Sea, Arctic | JAMSTEC, Arctic Challenge for Sustainability II (ArCS II) Project | 4 test items were conducted during 8 dives. | The test results helped to fix problems and to improve the performance of the drone, which was planned to be used for under ice surveys in 2022. | [84] |
| 34 | 2022 | COMAI | Chukchi Sea, Arctic | JAMSTEC, Arctic Challenge for Sustainability II (ArCS II) Project | 4 test items were conducted. A total cruising distance is more than 200 m along the ice edge. | Measured the vertical profiles of temperature and salinity around the ice and mapped the underwater ice thickness. | [85] |
| 35 | 2023 | MONACA | Off the coast of Langhovde in Lütso Holm Bay, Antarctic | University of Tokyo, JSPS KAKENHI | In total 20 dives were conducted, with 6 sub-ice surveys, 2 mid-ocean explorations, 5 submarine topographic surveys, and 1 observation of the ice shelf edge of Langhovde Glacier. | Deployed the first Japanese AUV in Antarctic, obtain the bathymetry, seawater temperature and salinity measurements. | [86,87] |
| 36 | 2008, 2010, 2014 | Polar ARV | Long-term ice station of the 6th CHINARE at 81°N, Arctic | SIA, CAS, Chinese National 863 Program fund |
Polar ARV operated for 7 days, covering a total distance of 9 km beneath the ice. | Measured spectral irradiance, ice draft, temperature, and conductivity, and recorded images and videos beneath the ice | [88] |
| 37 | 2019, 2020 | TS-1000 | Ross Sea at 75°S, Antarctic | SIA, CAS, Strategic Priority Research Program of CAS | The AUV conducted 17 profile survey missions, and traveled a total of 68 km. | Collected extensive hydrological data including measurements of ocean currents, temperature, salinity, turbidity, dissolved oxygen, and chlorophyll. |
[89] |
| 38 | 2021 | TS-4500 | High latitudes of the Arctic | SIA, CAS | --- | Marked China’s first use of an AUV for near-seabed exploration in the Arctic collecting data about the floating ice, the waters and the seabed. | [91] |
| 39 | 2022 | Seafloor Mapping (Dorado) |
Canadian Beaufort Sea, Inuvialuit Settlement Region, Arctic | MBARI | Several sinkholes-like valleys as large as the size of a city with six-story buildings were recorded by the two AUVs. | Gathered seafloor mapping information using a swath multibeam sonar, two sidescan sonars, and a sub-bottom profiler, all rated for depths up to 6,000 m. | [93] |
| 40 | 2023 | XH1000 | Chukchi Sea, Arctic | Harbin Engineering University | The vehicle mapped an area of 7,000 square meters beneath the Arctic ice. | Collected detailed data on ice tomography and water properties | [94] |
References
- Singh, H., Maksym, T., Wilkinson, J., Williams, G, 2017. Inexpensive, small AUVs for studying ice-covered polar environments. Sci. Robot., 2(7), eaan4809. [CrossRef]
- Broecker, W.S., 1991. The great ocean conveyor. Oceanography, 4(2), 79–89. [CrossRef]
- Wadhams, P., Krogh, B., 2019. Operational history and development plans for the use of AUVs and UAVs to map sea ice topography. Polar Sci., 21, 195-203. [CrossRef]
- Nicholls, K.W., Abrahamsen, E.P., Buck, J.J.H., Dodd, P.A., Goldblatt, C., Griffiths, G., Heywood, K.J., Hughes, N.E., Kaletzky, A., Lane-Serff, G.F., McPhail, S.D., Millard, N.W., Oliver, K.I.C., Perrett, J., Price, M.R., Pudsey, C.J., Saw, K., Stansfield, K., Stott, M.J., Wadhams, P., Webb, A.T., Wilkinson, J.P., 2006. Measurements beneath an Antarctic ice shelf using an autonomous underwater vehicle. Geophys. Res. Lett., 33, L08612. [CrossRef]
- Orsi, A. H., Smethie, W. M., J. L., Bullister, 2002. On the total input of Antarctic waters to the deep ocean: A preliminary estimate from chlorofluorocarbon measurements. J. Geophys. Res., 107(C8), 3122. [CrossRef]
- Payne, A. J., Vieli, A., Shepherd, A. P., Wingham, D. J., Rignot E., 2004, Recent dramatic thinning of largest West Antarctic ice stream triggered by oceans, Geophys. Res. Lett., 31, L23401. [CrossRef]
- Quetin, L. B., Ross, R. M., Frazer, T. K., Haberman, K. L., 1996. Factors affecting distribution and abundance of zooplankton, with an emphasis on Antarctic krill, Euphausia Superba. Antarct. Res. Ser., 70, 357. [CrossRef]
- Loeb, V., Siegel, V., Holm-Hansen, O., Hewitt, R., Fraser, W., Trivelpiece W., Trivepliece, S, 1997. Effects of sea-ice extent and krill or salp dominance on the Antarctic food web. Nature, 387, 897–900. [CrossRef]
- Brierley, A.S., Millard, N.W., McPhail, S.D., Stevenson P., Pebody, M., Perrett, J., Squires, M., Griffiths, G, 2002. Antarctic krill under sea ice: Elevated abundance in a narrow band just south of ice edge. Science, 295, 1890-1892. [CrossRef]
- Wilkinson, J.P., Wadhams, P., Hughes, N.E., 2007. Modelling the spread of oil under fast sea ice using three-dimensional multibeam sonar data. Geophys. Res. Lett., 34, L22506. [CrossRef]
- Kaminski, C., Crees, T., Ferguson, J., Forrest, A., Williams, J., Hopkin, D., Heard, G., 2010. 12 days under ice – an historic AUV deployment in the Canadian High Arctic, In: 2010 IEEE/OES Autonomous Underwater Vehicles, Monterey, CA, USA, pp. 1-11. [CrossRef]
- Wadhams, P., 2012. The use of autonomous underwater vehicles to map the variability of under-ice topography. Ocean Dyn., 62(3), 439-447. [CrossRef]
- Sheng, E.L., 2022. The Polar Silk Road and the Belt and Road Initiative: Integration and Optimization, Arctic Opportunities and Challenges. Palgrave Macmillan, Singapore. [CrossRef]
- Qanittaq, 2023. The Clean Arctic Shipping Initiative. https://www.qanittaq.ca (accessed February 2024).
- Duarte, P., Sundfjord, A., Meyer, A., Hudson, S.R., Spreen, G., Smedsrud, L.H., 2020. Warm Atlantic water explains observed sea ice melt rates north of Svalbard. J. Geophys. Res. Oceans, 125(8), e2019JC015662. [CrossRef]
- Fraser, A.D., Wongpan, P., Langhorne, P.J., Klekociuk, A.R., Kusahara, K., Lannuzel, D., Massom, R.A., Meiners, K.M., Swadling, K.M., Atwater, D.P., Brett, G.M., Corkill, M., Dalman, L.A., Fiddes, S.L., Granata, A., Guglielmo, L., Heil, P., Leonard, G.H., Mahoney, A.R., McMinn, A., van der Merwe, P., Weldrick, C.K., Wienecke, B., 2023. Antarctic landfast sea ice: A review of its physics, biogeochemistry and ecology. Rev. Geophys., 61(2), e2022RG000770. [CrossRef]
- Lyon, W.K., 1961. Ocean and sea-ice research in the Arctic Ocean via submarine. New York Academy of Science, 2(23), 662–674.
- Wadhams, P., 1988. The underside of Arctic sea ice imaged by sidescan sonar. Nature, 333, 161–164. [CrossRef]
- Wadhams, P., 2008. Arctic sea ice changes under global warming. In: Proc. ICETECH 2008, International Conference On Performance of Ships and Structures in Ice, Banff, July 20–23 2008. Soc. Naval Archit. Marine Engineers ISBN 978-0-9780896-1.
- Williams, G. D., Maksym, T., Wilkinson, J., Kunz, C., Trujillo, E., Steer, A., Kimball, P., Massom, R., Meiners, K., Leonard, K., Murphy, C., Heil, P., Lieser, J., Lachlan-Cope, T., Singh H., 2013. Beyond point measurements: 3-D characterization of sea ice floes. Eos Trans. Am. Geophys. Union, 94(7), 69-70.
- Gherardi, M., Lagomarsino, M.C., 2015. Characterizing the size and shape of sea ice floes. Sci. Rep., 5, 10226. [CrossRef]
- Jeffrey M., Maksym, T., Weissling, B., Singh H., 2019. Estimating early-winter Antarctic sea ice thickness from deformed ice morphology. The Cryosphere, 13, 2915–2934. [CrossRef]
- Dowdeswell, J. A., Evans, J., Mugford, R., Griffiths, G., McPhail, S., Millard, N., Stevenson, P., Brandon, M.A., Banks, C., Heywood, K.J., Price, M.R., Dodd, P.A., Jenkins, A., Nicholls, K.W., Hayes, D., Abrahamsen, E.P., Tyler, P., Bett, B., Jones, D., Wadhams, P., Wilkinson, J.P., Stansfield, K., Ackley, S, 2008. Autonomous underwater vehicles (AUVs) and investigations of the ice–ocean interface in Antarctic and Arctic waters. J. Glaciol., 54(187), 661-672. [CrossRef]
- Fan, S., Zhang, X., Zeng, G., Cheng, X., 2023. Underwater ice adaptive mapping and reconstruction using autonomous underwater vehicles. Front. Mar. Sci., 10, 1124752. [CrossRef]
- Griffiths, G., 2020. Fifty years and counting: Applications of AUVs in the polar regions, 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV). St. Johns, NL, Canada, 2020, 1-6. [CrossRef]
- Francois, R.E., Nodland, W.K., 1972. Unmanned Arctic Research Submersible (UARS) system development and test report. Tech. Rep. APL-UW 7219, 88, Univ. of Washington, Appl. Phys. Lab. Accession Number: 00043944.
- Murphy, S., 1972. Arctic technology development at the University of Washington, Final Report. September 1972.
- Francois, R.E., 1977. High resolution observations of under-ice morphology, Univ. of Washington, Appl. Phys. Lab., Technical Report, APL-UW 7712, 30. Accession Number: ADA039753.
- Francois, R.E., 2006. The Unmanned Arctic Research Submersible System, Mar. Technol. Soc. J., 40(2), 75-77. [CrossRef]
- Morison, J.H., McPhee, M.G., 1998. Lead convection measured with an autonomous underwater vehicle. J. Geophys. Res. Oceans, 103(C2), 3257-3281. [CrossRef]
- McPhee, M.G., Ackley, S.F., Guest, P., Huber, B.A., Martinson, D.G., Morison, J.H., Muench, R.D., Padman, L., Stanton, T.P., 1996. The Antarctic zone flux experiment. Bull. Amer. Meteor. Soc., 77(6), pp.1221-1232.
- Hayes, D. Morison, J., 2002. Determining turbulent vertical velocity, and fluxes of heat and salt with an autonomous underwater vehicle. J. Atmos. Oceanic Technol., 19(5), 759–779. [CrossRef]
- Bellingham, J. G., Goudey, C.A., Consi, T.R., Bales, J.W., Atwood, D.K., Leonard, J.J., Chryssostomidis, C., 1994. A second generation survey AUV. In: Proceedings of IEEE Symposium on Autonomous Underwater Vehicle Technology, 148–155.
- Odyssey Class History, 2024. A history of the Odyssey-class of autonomous underwater vehicles. MIT Sea Grant. https://seagrant.mit.edu/auv-odyssey-class/ (accessed February 2024).
- Butler, B., 2018. Into the Labyrinth: The making of a modern-day Theseus. https://www.brucebutler.ca/into-the-labyrinth.html (accessed February 2024).
- Ferguson, J., Pope, A., Butler, B., Verrall, R. I., 1999. Theseus AUV: Two record breaking missions. Sea Technol., 40(2), 65-70. [CrossRef]
- Theseus AUV, 2024. International Submarine Engineering Ltd. https://ise.bc.ca/product/theseus-auv (accessed February 2024).
- Bellingham, Streitlien, J.G.K., Overland, J., Rajan, S., Stein, P., Stannard, 1., Kirkwood, W., Yoerger, D., 2000. An Arctic Basin observational capability using AUVs. Oceanography, 13(2), pp. 64-70.
- MBARI News, 2002. Underwater robot tested beneath the Arctic ice sheet. Monterey Bay Aquarium Research Institute. https://www.mbari.org/news/underwater-robot-tested-beneath-the-arctic-ice-sheet/ (accessed February 2024).
- Tervalon, N.S., Henthorn, R., 2002. Ice profiling sonar for an AUV: experience in the Arctic. In: 2002 MTS/IEEE OCEANS Biloxi (Biloxi), 1, 305-310. [CrossRef]
- Wadhams, P., Wilkinson, J.P., McPhail, S.D., 2006. A new view of the underside of Arctic sea ice. Geophys. Res. Lett., 33, L04501. [CrossRef]
- The story of Autosub, 2022. National Oceanography Center. https://noc.ac.uk/technology/technology-archive/story-autosub (accessed February 2024).
- Brandon, M.A., Brierley, A.S., Fernandes, P.G., Armstrong, F., Millard, N.W., McPhail, S.D., Stevenson, P., Pebody, M., Perrett, J., Squires, M., Griffiths, G., 2001. Measurements of the sea ice Thickness Distribution and Icebergs Using the Autonomous Underwater Vehicle Autosub 2 in Antarctica. AGU, 2001, pp.OS42B-0471.
- McPhail, S.D., Furlong, M.E., Pebody, M., Perrett, J.R., White, D., 2009. Exploring beneath the PIG Ice Shelf with the Autosub3 AUV’. In: OCEANS 2009-EUROPE, Bremen, Germany, 2009, pp. 1-8. [CrossRef]
- Wadhams, P., Wilkinson, J.P., Kaletzk, A., 2004. Sidescan sonar imagery of the winter marginal ice zone obtained from an AUV. J. Atmos. Ocean. Technol., 21 (9), 1462–1470.
- Strutt, J.E., 2006. Report of the inquiry into the loss of Autosub2 under the Fimbulisen. In: Research and Consultancy report 12, National Oceanography Centre, UK, 39. URL https://eprints.soton.ac.uk/41098.
- Brito, M., Griffiths, G., Ferguson, J., Hopkin, D., Mills, R., Pederson, R., MacNeil, E., 2012. A behavioral probabilistic risk assessment framework for managing autonomous underwater vehicle deployments. J. Atmos. Oceanic Technol., 29(11), pp.1689-1703.
- Jenkins, A., Dutrieux, P., Jacobs, S.S., McPhail, S.D., Perrett, J.R., Webb, A.T. and White, D., 2010. Observations beneath Pine Island Glacier in West Antarctica and implications for its retreat. Nat. Geosci., 3(7), pp.468-472.
- Kimura, S., Jenkins, A., Dutrieux, P., Forryan, A., Naveira Garabato, A.C. and Firing, Y., 2016. Ocean mixing beneath Pine Island Glacier ice shelf, West Antarctica. J. Geophys. Res. Oceans, 121(12), pp.8496-8510.
- McPhail, S., Templeton, R., Pebody, M., Roper, D., Morrison, R., 2019. Autosub Long Range AUV missions under the Filchner and Ronne Ice Shelves in the Weddell Sea, Antarctica - an Engineering Perspective. In: OCEANS 2019 - Marseille, Marseille, France, 2019, pp. 1-8. [CrossRef]
- Davis, P.E.D., Jenkins, A., Nicholls, K.W., Dutrieux, P., Schröder, M., Janout, M.A., Hellmer, H., Templeton, R., McPhail, S., 2022. Observations of modified warm deep water beneath Ronne Ice Shelf, Antarctica, from an Autonomous Underwater Vehicle. J. Geophys. Res. Oceans, 127, e2022JC019103. [CrossRef]
- TARSAN, 2018. Thwaites-Amundsen Regional Survey and Network Integrating Atmosphere-Ice-Ocean Processes (TARSAN) Project. The International Thwaites Glacier Collaboration. https://thwaitesglacier.org/projects/tarsan (accessed February 2024).
- Wåhlin, A.K., Graham, A.G.C, Hogan, K.A., Queste, B.Y., Boehme, L., Larter, R.D., Pettit, E., Wellner, J., Heywood, K.J., 2021. Pathways and modification of warm water flowing beneath Thwaites Ice Shelf, West Antarctica. Sci. Adv., 7, eabd7254. [CrossRef]
- Graham, A.G.C., Wåhlin, A.K., Hogan, K.A., Nitsche, F., 2022. Rapid retreat of Thwaites Glacier in the pre-satellite era. Nat. Geosci. 15, 706–713. [CrossRef]
- Wåhlin, A.K., Bastien, Y.Q., Graham, A.G.C., Hogan, K.A., Boehme, L., Heywood, K.J., Larter, R.D., Pettit, E., Wellner, J.S., 2020. Warm water flow and mixing beneath Thwaites Glacier ice shelf, West Antarctica. URL https://presentations.copernicus.org/EGU2020/EGU2020-19934_presentation.pdf.
- NOC News, 2022. Boaty McBoatface returns from Thwaites Glacier. National Oceanography Center. https://noc.ac.uk/news/boaty-mcboatface-returns-thwaites-glacier (accessed February 2024).
- ITGC News, 2024. Final mission for the underwater robot ‘Ran’ under Thwaites Glacier. The International Thwaites Glacier Collaboration. https://thwaitesglacier.org/news/final-mission-auv-under-thwaites-glacier (accessed February 2024).
- Kunz, C., Murphy, C., Singh, H., Pontbriand, C., Sohn, R.A., Singh, S., Sato, T., Roman, C., Nakamura, K.i., Jakuba, M., 2009. Toward extraplanetary under-ice exploration: Robotic steps in the Arctic. J. Field Robot. 2009, 26, 411–429. [CrossRef]
- Williams, G., Turner, D., Maksym, T., Singh, H., 2018. Near-coincident mapping of sea ice from above and below with UAS and AUV. In: 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 2018, pp. 1-6. [CrossRef]
- Williams, G., Maksym, T., Wilkinson, J., Kunz, C., Singh, H., 2015. Thick and deformed Antarctic sea ice mapped with autonomous underwater vehicles. Nat. Geosci., 8(1), 61-67. [CrossRef]
- Williams, G.D., Junz, C., Kimball, P., Frost, R., Alexander, P., 2017. 3-D mapping of sea ice draft with an autonomous underwater vehicle. Ver. 1, Australian Antarctic Data Centre. [CrossRef]
- SeaBED, 2024. Hanumant Singh Lab. Woods Hole Oceanographic Institution. https://web.whoi.edu/singh/auvasf/seabed (accessed February 2024).
- Wulff, T., Lehmenhecker, S., Bauerfeind, E., Hoge, U., Shurn, K., Klages, M., 2013. Biogeochemical research with an Autonomous Underwater Vehicle: Payload structure and arctic operations. In: OCEANS-Bergen,2013MTS/IEEE.IEEE,pp.1–10. [CrossRef]
- Wulff, T., Bauerfeind, E., Appen, W.v., 2016. Physical and ecological processes at a moving ice edge in the Fram Strait as observed with an AUV. Deep-Sea Res. Pt. I, 115, 253-264. [CrossRef]
- Crees, T., Kaminski, C., Ferguson, J., Laframboise, J.M., Forrest, A., Williams, J., MacNeil, E., Hopkin, D., Pederson, R., 2010. UNCLOS under ice survey - An historic AUV deployment in the Canadian high arctic. In: OCEANS 2010 MTS/IEEE SEATTLE, pp.1-8.
- AGP, 2020. Antarctic Gateway Partnership. Institute for Marine and Antarctic Studies, University of Tasmania. https://www.imas.utas.edu.au/antarctic-gateway-partnership/home (accessed February 2024).
- King, P., Williams, G., Coleman, R., Zürcher, K., Bowden-Floyd, I., Ronan, A., Kaminski, C., Laframboise, J.M., McPhail, S., Wilkinson, J., Bowen, A., 2018. Deploying an AUV beneath the Sørsdal Ice Shelf: Recommendations from an expert-panel workshop. In: 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), 1-6. [CrossRef]
- Gwyther, D.E., Spain, E., King, P., Guihen, D., Williams, G.D., Evans, E., Cook, S., Richter, O., Galton-Fenzi, B.K., Coleman, R., 2020. Cold ocean cavity and weak basal melting of the Sørsdal ice shelf revealed by surveys using autonomous platforms. J. Geophys. Res. Oceans, p.e2019JC015882. [CrossRef]
- King, P., Ziürcher K., Bowden-Floyd, I., 2020. A risk-averse approach to mission planning: nupiri muka at the Thwaites Glacier. In: 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St. Johns, NL, Canada, 2020, pp. 1-5. [CrossRef]
- Doble, M., Wadhams, P., Forrest, A., Laval, B., 2008. Experiences from two-years’ through ice AUV deployments in the high Arctic. In: 2008 IEEE/OES Autonomous Underwater Vehicles, 1-7.
- Doble, M.J., Forrest, A.L., Wadhams, P., Laval, B.E., 2009. Through-ice AUV deployment: Operational and technical experience from two seasons of arctic fieldwork. Cold Reg. Sci. Technol., 56(2-3), 90-97.
- Wadhams, P., Doble, M.J., 2008. Digital terrain mapping of the underside of sea ice from a small AUV. Geophys. Res. Lett., 35(1), L01501.
- Wadhams, P., Krogh, B., 2019. Operational history and development plans for the use of AUVs and UAVs to map sea ice topography. Polar Sci., 21(2019), 195-203. [CrossRef]
- Forrest, A.L., Hamilton, A.K., Schmidt, V.E., Laval, B.E., Mueller, D., Crawford, A.J., Brucker, S., Hamilton, T., 2012. Digital terrain mapping of Petermann Ice Island fragments in the Canadian high arctic. In: 21st IAHR International Symposium on Ice, pp. 710–721.
- Berge, J., Båtnes, A.S., Johnsen, G., Blackwell, S.M., Moline, M.A, 2011. Bioluminescence in the high Arctic during the polar night. Mar. Biol., 159(1), 231–237.
- Plueddemann, A.J., Kukulya, A.L., Stokey, R., Freitag, L., 2012. Autonomous underwater vehicle operations beneath coastal sea ice. IEEE/ASME Transactions on Mechatronics, 17(1), 54-64. [CrossRef]
- Norgren, Petter, Skjetne, R., 2014. Using autonomous underwater vehicles as sensor platforms for ice-monitoring. Model. Ident. Control., 35 (2014), 263-277.
- Meister, M., Dichek, D., Spears, A., Hurwitz, B., Ramey, C., Lawrence, J., Philleo, K., Lutz, J., Lawrence, J., Schmidt, B.E., Icefin: Redesign and 2017 Antarctic field deployment. In: OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 2018, pp. 1-5. [CrossRef]
- Schmidt, B., Nicholls, K., Davis, P., Smith, J., Riverman, K., Holland, D., Dichek, D., Mullen, A., Lawrence, J., Washam, P., Basinski-ferris, A., Anker, P., Meister, M., Spears, A., Hurwitz, B., Quartini, E., Clyne, E., Thomas, C., Wake, J., Vaughn, D., the ITGC Team (MELT & Thwaites Glacier Grounding Zone Downstream teams), 2020. The Grounding Zone of Thwaites Glacier Explored by Icefin. In: EGU General Assembly 2020, Online, 4–8 May 2020, EGU2020-20512, 2020. [CrossRef]
- Washam, P., Lawrence, J.D., Stevens, C.L., Hulbe, C., Horgan, H.J., Robinson, N.J., Stewart, C.L., Spears, A., Quartini, E., Hurwitz., B., Meister, M.R., Mullen, A.D., Dichek, D.J., Bryson, F., Schmidt, B.E., 2023. Direct observations of melting, freezing, and ocean circulation in an ice shelf basal crevasse. Sci. Adv., 9, eadi7638. [CrossRef]
- Lawrence, J.D., Hulbe, C., Schmidt, B.E., 2023. Robotic exploration of sub-ice shelf melting and freezing processes. Nat. Geosci., 16, 198–199. [CrossRef]
- Noguchi, T., 2016. Succeeded in photographing the Arctic Ocean under sea ice using a small AUV prototype. Japan Agency for Marine-Earth Science and Technology. https://www.jamstec.go.jp/j/about/press_release/20161124 (accessed February 2024).
- ArCS, 2016. R/V Miral Cruise Report MR16-06 (MR16-Nishino). Japan Agency for Marine-Earth Science and Technology. https://www.jamstec.go.jp/iace/e/report/pdf/2016.MR16-06.pdf (accessed February 2024).
- ArCS Ⅱ, 2021. R/V Miral Cruise Report MR21-05C. Japan Agency for Marine-Earth Science and Technology. https://www.godac.jamstec.go.jp/cr_catalog/external/metadata/MR21-05C_all/file/MR21-05C_all.pdf (accessed February 2024).
- ArCS Ⅱ, 2022. R/V Miral Cruise Report MR22-06C (MR22-Itoh). Japan Agency for Marine-Earth Science and Technology. https://www.godac.jamstec.go.jp/cr_catalog/external/metadata/MR22-06C_all/file/MR22-06C_all.pdf (accessed February 2024).
- Yamagata, H., Kochii, S., Yoshida, H., Nogi, Y., Maki, T., 2021. Development of AUV MONACA - hover-capable platform for detailed observation under ice. J. Robot. Mechatron., 33(6), pp.1223-1233.
- Yamaguchi, S., 2023. AUV MONACA observation in Ljuzo Holm Bay. National Institute of Polar Research. https://nipr-blog.nipr.ac.jp/jare/20230211auv-monaca.html (in Japanese, accessed February 2024).
- Zeng, J.B., Li, S., Li, Y.P., Wang, X.H., Chen, Q., Lei, R.B., Li, T., 2015. The observation of sea-ice in the sixth Chinese National Arctic Expedition using polar-ARV. In: OCEANS 2015–MTS/IEEE, Washington, October 19–22, 2015. Washington, DC, IEEE. [CrossRef]
- Zeng, J.B., Li, S., Liu, Y., 2021. Application of unmanned underwater vehicles in polar research. Adv. Polar Sci., 32(3), 173-184.
- Liu, T., Jiang, Z., Li, S., Gu, H., 2018. Explorer1000: A long endurance AUV with variable ballast systems. In: 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 2018, pp.1-6. [CrossRef]
- Wu, Y.H., 2021. China’s self-developed AUV shows impressive capabilities in latest Arctic scientific expedition. People’s Daily Online. https://en.people.cn/n3/2021/1030/c90000-9913574.html (accessed February 2024).
- Tao, L., 2019. Record of Chinese ninth Arctic scientific expedition (3): Successful deployment of “Haiyi” underwater glider. Encyclopedia (underwater world), 2019(06), 28-29.
- Lundsten, E., Paul, C.K., 2022. Arctic Expedition Fall 2022. Monterey Bay Aquarium Research Institute. https://www.mbari.org/expedition/arctic-expedition-fall-2022 (accessed February 2024).
- Huaxia, 2023. China-made robotic vehicle explores underside of Arctic ice. XinhuaNet. https://english.news.cn/20231008/bd459e0284384cbeb25a722c0bdf6a9e/c.html (accessed February 2024).
- Polar AUV Guide, 2022. Society for Underwater Technology. http://wsprdaemon.org/polar/chronology.html (accessed February 2024).
- Spreen, G., Melsheimer, C., Gerken, M., 2024. Sea ice concentration data on January 1 in Arctic and Antarctic, 2024. Institute of Environmental Physics, University of Bremen, Germany. https://data.seaice.uni-bremen.de/databrowser/ (accessed February 2024).
- Paull, L., Saeedi, S., Seto, M., Li, H., 2014. AUV navigation and localization: A review. IEEE J. Oceanic Eng., 39(1), 131-149.
- Barker, L.D.L., Jakuba, M.V., Bowen, A.D., German, C.R., Maksym, T., Mayer, L., Boetius, A., Dutrieux, P., Whitcomb, L.L., 2020. Scientific challenges and present capabilities in underwater robotic vehicle design and navigation for oceanographic exploration under-ice. Remote Sens.. 12(16), 2588. [CrossRef]
- Barker, L.D.L., Whitcomb, L.L., 2021. Performance analysis of ice-relative upward-looking doppler navigation of underwater vehicles beneath moving sea ice. Journal of Marine Science and Engineering. 9(2), 174. [CrossRef]
- Norgren, P., Mo-Bjørkelund, T., Gade, K., Hegrenæs, Ø., Ludvigsen. M., 2020. Intelligent buoys for aiding AUV navigation under the ice. In: 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St. Johns, NL, Canada, pp.1-7. [CrossRef]
- Nicholls, K.W., Abrahamsen, E.P., Heywood, K.J., Stansfifield, K., Østerhus, S., 2008. High-latitude oceanography using the Autosub autonomous underwater vehicle. Limnol. Oceanogr., 2008, 53, 2309-2320.
- Kepper, J.H., Claus, B.C., Kinsey, J.C., 2019. A Navigation Solution Using a MEMS IMU, Model-Based Dead-Reckoning, and One-Way-Travel-Time Acoustic Range Measurements for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng., 44(3), 664-682. [CrossRef]
- Liang, Z., Tian, M., Liao, Z., Wang, C., Li, J., 2022. Adaptive robust Kalman filter for AUV polar integrated navigation. In: 2022 International Conference on Machine Learning, Cloud Computing and Intelligent Mining (MLCCIM), Xiamen, China, pp.99-105. [CrossRef]
- McPhail, S., Templeton, R., Pebody, M., Roper, D., Morrison, R., 2019. Autosub Long Range AUV missions under the Filchner and Ronne Ice Shelves in the Weddell Sea, Antarctica - an Engineering Perspective. In: OCEANS 2019 - Marseille, Marseille, France, pp. 1-8. [CrossRef]
- McEwen, R., Thomas, H., Weber, D., Psota, F., 2005. Performance of an AUV navigation system at Arctic latitudes. In: IEEE Journal of Oceanic Engineering, vol. 30, no. 2, pp. 443-454. [CrossRef]
- Salavasidis, G., Munafòet, A., McPhail, S.D., Harris, C.A., Fenucci, D., Pebody, M., Rogers, E., Phillips, A.B., 2021. Terrain-aided navigation with coarse maps: Toward an Arctic crossing with an AUV. In: IEEE Journal of Oceanic Engineering, 46(4), pp.1192-1212. [CrossRef]
- King, P., Vardy, A., Forrest, A. L., 2018. Teach-and-repeat path following for an autonomous underwater vehicle. J. Field Robot., 35(5), 748-763.
- Underwater GPS, 2024. Discovery of Sound in the Sea. University of Rhode Island and Inner Space Center. https://dosits.org/galleries/technology-gallery/navigation-technology/underwater-gps (accessed February 2024).
- O’Hara, C.A., Collis, J.M., 2011. Acoustics in Arctic environments. In: 162nd Acoustical Society of America Meeting. San Diego, CA, USA, pp.1-2. http://inside.mines.edu/~jcollis/Pekerice_Lay_Language_Paper.pdf.
- Lewis, R.S., Drogou, M., King, P., Mann, G., Bose, N., Worby, A., 2012. An acoustic signal propagation experiment beneath sea ice. Ocean Eng., 43 (1), pp.56-63.
- Alexander, P., Duncan, A., Bose, N., Williams, G., 2016. Modelling acoustic propagation beneath Antarctic sea ice using measured environmental parameters. Deep-Sea Res. Pt. II, 131, pp. 84-95. [CrossRef]
- Stojanovic, M., 1996. Recent advances in high-speed underwater acoustic communications. IEEE J. Oceanic Eng.. 21(2), 125-136. [CrossRef]
- Johnson, M., Herold, D., Catipovic, J., 1994. The design and performance of a compact underwater acoustic network node. In: OCEANS, volume 3. Brest, France, pp.467-471. [CrossRef]
- Freitag, L., Koski, P., Morozov, A., Singh, S., Partan, J., 2012. Acoustic communications and navigation under Arctic ice. In: OCEANS. Hampton Roads, VA, USA, pp.1-8. [CrossRef]
- Schneider, T., Schmidt, H., Randeni, S., 2021. Self-adapting under-ice integrated communications and navigation network. In: 21 Fifth Underwater Communications and Networking Conference (UComms), Lerici, Italy, pp. 1-5. [CrossRef]
- Randeni, S., Schneider, T., Bhatt, E. C., Víquez, O. A., Schmidt, H., 2023. A high-resolution AUV navigation framework with integrated communication and tracking for under-ice deployments. J. Field Robot., 40(2), 346-367.
- Li, D., Wang, P., Du, L., 2021. Path planning technologies for autonomous underwater vehicles: A review. In: IEEE Access, vol. 7, pp.9745-9768. [CrossRef]
- Cheng, C.X., Sha, Q.X., He, B., Li, G.L., 2021. Path planning and obstacle avoidance for AUV: A review. Ocean Eng., 235, 109355. [CrossRef]
- Carroll, K.P., McClaran, S.R., Nelson, E.L., Barnett, D.M., Friesen, D.K., William, G.N., 1992. AUV Path planning: An A* approach to path planning with consideration of variable vehicle speeds and multiple, overlapping, time-dependent exclusion zones. In: Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology. IEEE, pp. 79–84.
- Szczerba, R.J., Galkowski, P., Glicktein, I.S., Ternullo, N., 2000. Robust algorithm for real-time route planning. IEEE Trans. Aerosp. Electron. Syst., 36 (3), 869–878.
- Alvarez, A., Caiti, A., 2001. A genetic algorithm for autonomous undetwater vehicle route planning in ocean environments with complex space-time variability. IFAC Proc., 34 (7), 237–242.
- Alvarez, A., Caiti, A., Onken, R., 2004. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng., 29 (2), 418–429.
- Li, J.J., Zhang, R.B., Yang, Y., 2014. Research on route obstacle avoidance task planning based on differential evolution algorithm for AUV. In: International Conference in Swarm Intelligence. Springer, pp. 106–113.
- Zhang, C.B., Gong, Y.J., Li, J.J., Lin, Y., 2014. Automatic path planning for autonomous underwater vehicles based on an adaptive differential evolution. In: Proceedings of the 2014 Annual Conference on Genetic and Evolutionary Computation, pp.89–96.
- Yang, G., Zhang, R.B., 2009. Path planning of AUV in turbulent ocean environments used adapted inertia-weight PSO. In: 2009 Fifth International Conference on Natural Computation. Vol. 3, IEEE, pp. 299–302.
- Tang, X.Y., Yu, F., Chen, R.J., 2010. Path planning of underwater vehicle based on particle swarm optimization. In: 2010 International Conference on Intelligent Control and Information Processing. IEEE, pp. 123–126.
- Wang, H.J., Wei, X., 2009. Research on global path planning based on ant colony optimization for AUV. J. Mar. Sci. Appl., 8 (1), 58–64.
- Zhang, G.L., Jia, H.M., 2012. Global path planning of AUV based on improved ant colony optimization algorithm. In: 2012 IEEE International Conference on Automation and Logistics. IEEE, pp.606–610.
- Tan, C.S., Sutton, R., Chudley, J., 2005. Quasi-random, manoeuvre-based motion planning algorithm for autonomous underwater vehicles. IFAC Proc., 38 (1), 103–108.
- Hernández, E., Carreras, M., Antich, J., Ridao, P., Ortiz, A., 2011. A topologically guided path planner for an AUV using homotopy classes. In: 2011 IEEE International Conference on Robotics and Automation. IEEE, pp. 2337–2343.
- Ding, F.G., Jiao, P., Bian, X.Q., Wang, H.J., 2005. AUV Local path planning based on virtual potential field. In: IEEE International Conference Mechatronics and Automation, volume 4. IEEE, pp. 1711–1716.
- Saravanakumar, S., Asokan, T., 2013. Multipoint potential field method for path planning of autonomous underwater vehicles in 3D space. Intell. Serv. Robotics, 6 (4), 211–224.
- Khanmohammadi, S., Alizadeh, G., Poormahmood, M., 2007. Design of a fuzzy controller for underwater vehicles to avoid moving obstacles. In: 2007 IEEE International Fuzzy Systems Conference. IEEE, pp. 1–6.
- Xu, H.L., Feng, X.S., 2009. An AUV fuzzy obstacle avoidance method under event feedback supervision. In: OCEANS 2009. IEEE, pp. 1–6.
- Duan, Q.J., Zhang, M., Zhang, Q., 2001. Local path planning method for AUV based on fuzzy-neural network. Ship Eng., 1, 54–58.
- Guerrero-González, A., García-Córdova, F., Gilabert, J., 2011. A biologically inspired neural network for navigation with obstacle avoidance in autonomous underwater and surface vehicles. In: OCEANS 2011 IEEE-Spain. IEEE, pp.1–8.
- Kawano, H., Ura, T., 2002a. Fast reinforcement learning algorithm for motion planning of nonholonomic autonomous underwater vehicle in disturbance. In: IEEE/RSJ International Conference on Intelligent Robots and Systems. Vol. 1, IEEE, pp.903–908.
- Kawano, H., Ura, T., 2002b. Motion planning algorithm for nonholonomic autonomous underwater vehicle in disturbance using reinforcement learning and teaching method. In: Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292). 4, IEEE, pp.4032–4038.
- Cao, X., Sun, C.Y., Yan, M.Z., 2019. Target search control of AUV in underwater environment with deep reinforcement learning. IEEE Access, 7, 96549–96559.
- Wu, H., Song, S.J., Hsu, Y.C., You, K.Y., Wu, C., 2019. End-to-end sensorimotor control problems of AUVs with deep reinforcement learning. In: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, pp.5869–5874.
- Yang, G., Zhang, R.B., Xu, D., Zhang, Z.Y., 2009. Local planning of AUV based on Fuzzy-Q learning in strong sea flow field. In: 2009 International Joint Conference on Computational Sciences and Optimization. Vol. 1, IEEE, pp.994–998.
- Yan, Z.P., Li, J.Y., Wu, Y., Yang, Z.W., 2018b. A novel path planning for AUV based on objects’ motion parameters predication. IEEE Access, 6, 69304–69320.
- Lim, H.S., Chin, C.K., Chai, S., Bose, N., 2020a. Online AUV path replanning using quantum-behaved particle swarm optimization with selective differential evolution. CMES Comput. Model. Eng. Sci., 1–18.
- Pebody, M., 2008. Autonomous underwater vehicle collision avoidance for under-ice exploration. Proc. IMechE, Part M: J. Eng. Marit. Environ., vol. 222, pp.53-66.
- Millar, G., 2014. An obstacle avoidance system for autonomous underwater vehicles: A reflexive vector field approach utilizing obstacle localization. In: 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MS, USA, 2014, pp. 1-4. [CrossRef]
- Hayashi, E., Kimura, H., Tam, C., Ferguson, J., Laframboise, J.M., Miller, G., Kaminski, C., Johnson, A., 2013. Customizing an autonomous underwater vehicle and developing a launch and recovery system. In: 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 2013, pp.1-7. [CrossRef]
- McFarlane, J.R., Mackay, L., 2015. Autonomous underwater vehicle operations in the Arctic. In: OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, pp.1-6. [CrossRef]
- Chen, X., Neil, B., Mario, B., Faisal, K., Gina, M., Craig, B., Zou, T., 2022. Risk-based path planning for autonomous underwater vehicles in an oil spill environment. Ocean Eng., 266, 113077.
- Bandhauer, TM., Garimella, S., Fuller, TF., 2011. A critical review of thermal issues in lithium-ion batteries. J. Electrochem. Soc., 2011, 158:R1. [CrossRef]
- Bradley, A.M., Feezor, M.D., Singh, H., Yates Sorrell, F., 2001. Power systems for autonomous underwater vehicles. In: IEEE J. Oceanic Eng., vol. 26, no. 4, pp. 526-538. [CrossRef]
- Phillips, A.B., Pebody, M., Marlow, R., Fanelli, F., Fenucci, D., Roper, D., 2020. Autosub 2000 under ice: Design of a new work class AUV for under ice exploration. In: 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St. Johns, NL, Canada, 2020, pp. 1-8. [CrossRef]
- Wilson R.A., Bales, J.W., 2006. Development and experience of a practical pressure-tolerant lithium battery for underwater use. OCEANS, 2006, pp. 1-5.
- McPhail, S., 2009. Autosub6000: A deep diving long range AUV. J. Bionic Eng., 6(1), pp. 55-62.
- Roper, D., Harris, C.A., Salavasidis, G., Pebody, M., Templeton, R., Prampart, T., Kingsland, M., Morrison, R., Furlong, M., Phillips, A.B., McPhail, S., 2021. Autosub Long Range 6000: A multiple-month endurance AUV for deep-ocean monitoring and survey. IEEE J. Oceanic Eng., 46(4), 1179-1191. [CrossRef]
- Roper, D.T., Phillips, A., Harris, C., Salavasidis, G., Pebody, M., Templeton, R., Sithalakshmi, S.V., Amma, S., Smart, M., Mcphail, S., 2017. Autosub long range 1500: An ultra-endurance AUV with 6000 km range. Proc. OCEANS Conf., pp.1-5. [CrossRef]
- Mendez, A., Leo, T.J., Herreros, M., 2014. Current state of technology of fuel cell power systems for autonomous underwater vehicles. Energies, 7, 4676-4693.
- Mendez, A., Leo, T.J., Herreros, M., 2014. Fuel cell power systems for autonomous underwater vehicles: state of the art. The 1st International e-conference on Energies, March 2014, 1-19. [CrossRef]
- Weydahl, H., Gilljam, M., Lian, T., Johannessen, T.C., Holm, S.I. and Hasvold, J.Ø., 2020. Fuel cell systems for long-endurance autonomous underwater vehicles – challenges and benefits. Int. J. Hydrog. Energy, 45(8): 5543-5553. [CrossRef]
- Hasvold, Ø., 1993. A magnesium-seawater power source for autonomous underwater vehicles, Attewell, A., Keily (Eds.), T., Power, S.14., 1993. In: Proceedings of the 18th International Power Sources Symposium, Leatherhead , 243.
- Hasvold, Ø., Johansen, K.H., 2002. The alkaline aluminium hydrogen peroxide semi-fuel cell for the HUGIN 3000 autonomous underwater vehicle. In: Proceedings of the 2002 Workshop on Autonomous Underwater Vehicles, 2002, pp.89-94, San Antonio, TX, USA.
- Hasvold, Ø., ohannessen, T.C., Forseth, J.S., Lian,T., 2006. Exposure of lithium batteries to external hydrostatic pressure. In: Proceedings of the 42nd Power Sources Conference, pp.75-78, Philadelphia, PA, USA.
- The HUGIN Family, 2007. Autonomous Underwater Vehicle - AUV - The HUGIN Family, pg. 15.. Kongsberg. https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/hugin-family-of-auvs/ (accessed February 2024).
- ARCS AUV, 2016. History. International Submarine Engineering. https://ise.bc.ca/history (accessed February 2024).
- Gilljam, M., Weydahl, H., Lian, T., Johannessen, T.C., Holm, S.I., Hasvold, J.Ø., 2016. 24 hour test of a fuel cell system for an autonomous underwater vehicle, ECS Trans., 71 (2016), pp. 145-154. https://iopscience.iop.org/article/10.1149/07101.0145ecst.
- Borgogna, G., Lamberti, T., Massardo, A.F., 2015. Innovative power system for autonomous underwater vehicle. In: OCEANS 2015 - Genova, Genova, Italy, 2015, pp.1-8. [CrossRef]
- Chiche, A., Lindbergh, G., Stenius, I., Lagergren, C., 2021. A strategy for sizing and optimizing the energy system on long-range AUVs. IEEE J. Ocean. Eng., 46(4), 1132-1143. [CrossRef]
- Wang, X.M., Shang, J.Z., Luo, Z.R., Tang, Li., Zhang, X.P., Li, J., 2011. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energ. Rev., 16(4), 1958-1970. [CrossRef]
- Ferguson, J., 2008. Adapting AUVs for use in under-ice scientific missions. In OCEANS 2008, pp.1–5.
- Ferguson, J., 1998. The Theseus autonomous underwater vehicle. Two successful missions. In: Proceedings of the International Symposium on Underwater Technology, pp.109–114.
- Kukulya, A., Plueddemann, A., Austin, T., Stokey, R., Purcell, M., Allen, B., Littlefield, R., Freitag, L., Koski, P., Gallimore, E., Kemp, J., Newhall, K., Pietro, J., 2010. Under-ice operations with a REMUS-100 AUV in the Arctic. Proc. IEEE/OES Auton. Underwater Veh., pp.1-8. [CrossRef]
- Norgren, P., Lubbad, R., Skjetne, R., 2014. Unmanned underwater vehicles in Arctic operation. In: 22nd IAHR International Symposium on Ice.
- King, P., Lewis, R., Mouland, D., Walker, D., 2009. CATCHY an AUV ice dock. In: Oceans 2009, Biloxi.
- Lewis, R., Bose, N., Lewis, S., King, P., Walker, D., Devillers, R., Ridgley, N., Husain, T., Munroe, J., Vardy, A., 2016. Merlin—A decade of large AUV experience at memorial university of newfoundland. Proc. IEEE/OES Auton. Underwater Veh., pp.222-229. [CrossRef]
- Bellingham, J.G., Cokelet, E.D., Kirkwood, W.J., 2008. Observation of warm water transport and mixing in the Arctic basin with the ALTEX AUV. In: 2008 IEEE/OES Autonomous Underwater Vehicles, pp.1–5.
- Spain, E., Gwyther, D., King, P., 2019. Submarine ventures under Sorsdal glacier. Aust. Antarct. Mag., 36, 18.
- Strutt, J.E., 2006. Report of the inquiry into the loss of Autosub2 under the Fimbulisen. In: Research & Consultancy Report, National Oceanography Centre, Southampton, UK.
- Loh, T.Y., Brito, M.P., Bose, N., Xu, J., Tenekedjiev, K., 2020. Human error in autonomous underwater vehicle deployment: A system dynamics approach. Risk Anal., 2020, 40, 1258–78. [CrossRef]
- Chen, Xi., Neil, B., Mario, B., Faisal, K., Bo, T., Zou, T., 2021. A review of risk analysis research for the operations of autonomous underwater vehicles. Reliab. Eng. Syst. Saf., 216, 2021, 108011. [CrossRef]
- Rausand, M., 2013. Risk assessment: theory, methods, and applications. J. R. Stat. Soc. Ser. A. Stat. Soc., 187.
- Griffiths, G., Collins, K.J., 2007. Towards a risk management process for autonomous underwater vehicles. In: Proceedings of the Masterclass in AUV Technology for Polar Sci. at the National Oceanography Centre, Southampton, 28-30, March 2006. Society for Underwater Technology, London. pp.146.
- Griffiths, G., Brito, M., 2008. Predicting risk in missions under sea ice with autonomous underwater vehicles. In: 2008 IEEE/OES Autonomous Underwater Vehicles, Woods Hole, MA, USA, pp. 1-7. [CrossRef]
- Brito, M.P., Griffiths, G., Challenor, P., 2010. Risk analysis for autonomous underwater vehicle operations in extreme environments. Risk Anal., 30, 1771-1788. [CrossRef]
- Brito, M.P., Griffiths, G., 2011. A Markov chain state transition approach to establishing critical phases for AUV reliability. IEEE J. Ocean. Eng., 36 (1), 139–149.
- Brito, M.P., Griffiths, G., 2016. A Bayesian approach for predicting risk of autonomous underwater vehicle loss during their missions. Reliab. Eng. Syst. Saf., 146, pp.55-67. [CrossRef]
- Loh, T.Y., Brito, M.P., Bose, N., Xu, J., Tenekedjiev, K., 2020. Fuzzy system dynamics risk analysis (FuSDRA) of autonomous underwater vehicle operations in the Antarctic. Risk Anal., 40, 818-841. [CrossRef]
- Bremnes, J.E., Thieme, C.A., Sørensen, A.J., Utne, I.B., Norgren, P., 2020. A bayesian approach to supervisory risk control of AUVs applied to under-ice operations. Mar. Technol. Soc. J., 54(4), 16-39(24).
- Utne, I.B., Rokseth, B., Sørensen, A.J., Vinnem, J.E., 2020. Towards supervisory risk control of autonomous ships. Reliab. Eng. Syst. Safe., 196(C), 1-15. [CrossRef]
- ISO, 2018. ISO 31000 Risk Management: Principles and Guidelines. Geneva, Switzerland. https://www.iso.org/obp/ui/#iso:std:iso:31000:ed-1:v1:en (accessed February 2024).
- Bremnes, J.E., Norgren, P., Sørensen, A.J., Thieme, C.A., Utne, I.B., 2019. Intelligent risk-based under-ice altitude control for autonomous underwater vehicles. In: OCEANS’19 MTS/IEEE Seattle. pp.1-8. Seattle, WA: Marine Technology Society. [CrossRef]
- Yang, R.C., Utne, I. B., 2022. Towards an online risk model for autonomous marine systems (AMS). Ocean Eng., 251, 111100. [CrossRef]
- Yang, R.C., Bremnes, J.E., Utne, I. B., 2023. Online risk modeling of autonomous marine systems: Case study of autonomous operations under sea ice. Ocean Eng., 281, 114765. [CrossRef]
- Dodd, Paul, A., M. R., Price, Karen, J., Heywood, Miles, P., 2006. Collection of water samples from an autonomous underwater vehicle for tracer analysis. J. Atmos. Oceanic Technol., 23 (2006), 1759-1767.
- Hwang, J., Bose, N., Millar, G., Bulger, C., Nazareth, G., Chen, X., 2024. Adaptive AUV mission control system tested in the waters of Baffin Bay. Drones, 8(2), 45. [CrossRef]
- Wynn, R. B., Huvenne, V. A.I., Bas, T. P. L., Murton, B. J., Connelly, D. P., Bett, B. J., Ruhl, H. A., Morris, K. J., Peakall, J., Parsons, D. R., Sumner, E. J., Darby, S. E., Dorrell, R. M., Hunt, J. E., 2014. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol., 352, 451-468.
- Graham, A.G.C., Dutrieux, P., Vaughan, D.G., Nitsche, F.O., Gyllencreutz, R., Greenwood, S.L., Larter,R,D,. Jenkins, A., 2013. Seabed corrugations beneath an Antarctic ice shelf revealed by Autonomous Underwater Vehicle survey: origin and implications for the history of Pine Island Glacier. J. Geophys. Res., 118, 1356-1366.
- Dowdeswell, J.A., Evans, J., Cofaigh, C.Ó., 2010. Submarine landforms and shallow acoustic stratigraphy of a 400 km-long fjord–shelf–slope transect, Kangerlussuaq margin, East Greenland. Quat. Sci. Rev., 29, 3359-3369.
- Trevithick, J., 2020. The navy is building a network of drone submarines and sensor buoys in the Arctic. The War Zone. https://www.thedrive.com/the-war-zone/36821/the-navy-is-building-a-network-of-drone-submarines-and-sensor-buoys-in-the-arctic (accessed February 2024).
- Govindarajan, A. F., McCartin, L., Adams, A., Allan, E., Belani, A., Francolini, R., Fujii, J., Gomez-Ibañez, D., Kukulya, A., Marin, F., Tradd, K., Yoerger, D. R., McDermott, J. M., Herrera, S., 2022. Improved biodiversity detection using a large-volume environmental DNA sampler with in situ filtration and implications for marine eDNA sampling strategies. Deep-Sea Res. Pt. I, 189, 103871. [CrossRef]
- Li, X., Yu, S, 2023. Comparison of biological swarm intelligence algorithms for AUVs for three-dimensional path planning in ocean currents’ conditions. J. Mar. Sci. Technol., 28, 832–843. [CrossRef]
- Batchelor, C. L., Montelli, A., Ottesen, D., Evans J., Dowdeswell E. K., Christie, F. D.W., Dowdeswell, J. A., 2020. New insights into the formation of submarine glacial landforms from high-resolution Autonomous Underwater Vehicle data, Geomorphology, 370, 107396. [CrossRef]
- Okada, K., 2022. Breakthrough technologies for mineral exploration. Miner. Econ., 35, 429-454. [CrossRef]
- Tran, T. C., Ban, N. C., Bhattacharyya, J., 2020. A review of successes, challenges, and lessons from Indigenous protected and conserved areas. Biol. Conserv., 241, 108271. [CrossRef]
Figure 1.
Theseus AUV [37] (used with permission from ISE).
Figure 1.
Theseus AUV [37] (used with permission from ISE).

Figure 2.
Autosub series AUVs [42] (used with permission from NOC). (a) Autosub 1 AUV; (b) Autosub 2 AUV; (c) Autosub 3 AUV.
Figure 2.
Autosub series AUVs [42] (used with permission from NOC). (a) Autosub 1 AUV; (b) Autosub 2 AUV; (c) Autosub 3 AUV.
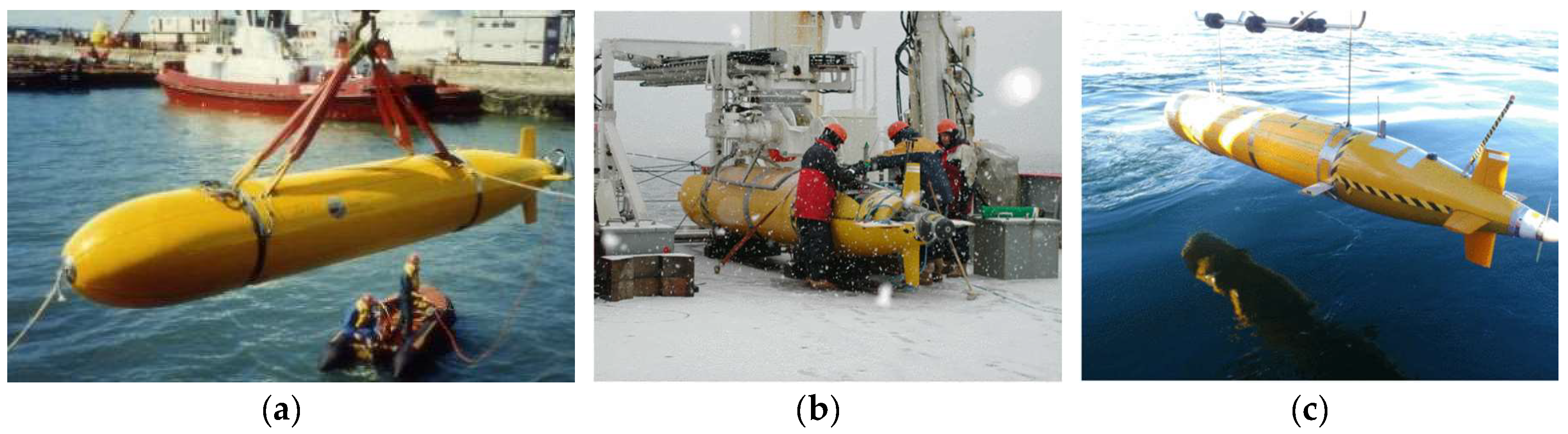
Figure 3.
Ran AUV deployed to the Thwaites Glacier [55] (used with permission from Ptof. Anna Wåhlin).
Figure 3.
Ran AUV deployed to the Thwaites Glacier [55] (used with permission from Ptof. Anna Wåhlin).

Figure 4.
SeaBED class AUVs [62] (used with permission from Prof. Hanumant Singh).
Figure 4.
SeaBED class AUVs [62] (used with permission from Prof. Hanumant Singh).

Figure 5.
nupiri muka AUV deployed to the Sørsdal ice shelf [68] (used with permission from Dr. David E. Gwyther; Photo: Glenn Johnstone from Australian Antarctic Division).
Figure 5.
nupiri muka AUV deployed to the Sørsdal ice shelf [68] (used with permission from Dr. David E. Gwyther; Photo: Glenn Johnstone from Australian Antarctic Division).

Figure 6.
RAIV AUV and the images taken below sea ice [82] (used with permission from JAMSTEC).
Figure 6.
RAIV AUV and the images taken below sea ice [82] (used with permission from JAMSTEC).

Figure 7.
A recovery scene of COMAI AUV [85] (used with permission from JAMSTEC).
Figure 7.
A recovery scene of COMAI AUV [85] (used with permission from JAMSTEC).
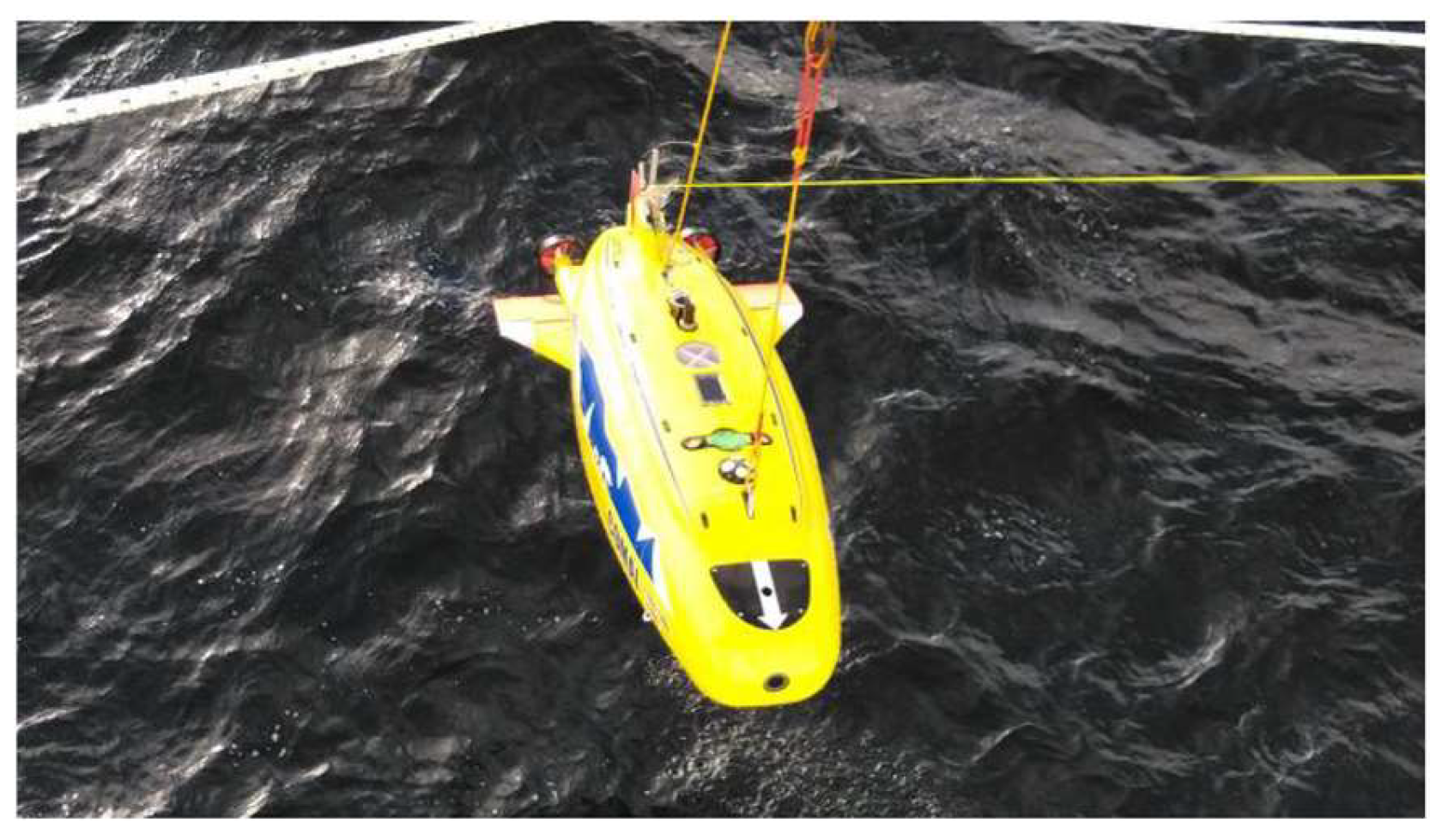
Figure 8.
MONACA AUV deployed in Antarctic [87] (used with permission from NIPR).
Figure 8.
MONACA AUV deployed in Antarctic [87] (used with permission from NIPR).

Figure 9.
Chinese AUVs deployed in the Arctic and Antarctic [89] (used with permission from SIA, CAS). (a) Polar ARV; (b) TS-1000 AUV; (c) TS-4500 AUV.
Figure 9.
Chinese AUVs deployed in the Arctic and Antarctic [89] (used with permission from SIA, CAS). (a) Polar ARV; (b) TS-1000 AUV; (c) TS-4500 AUV.
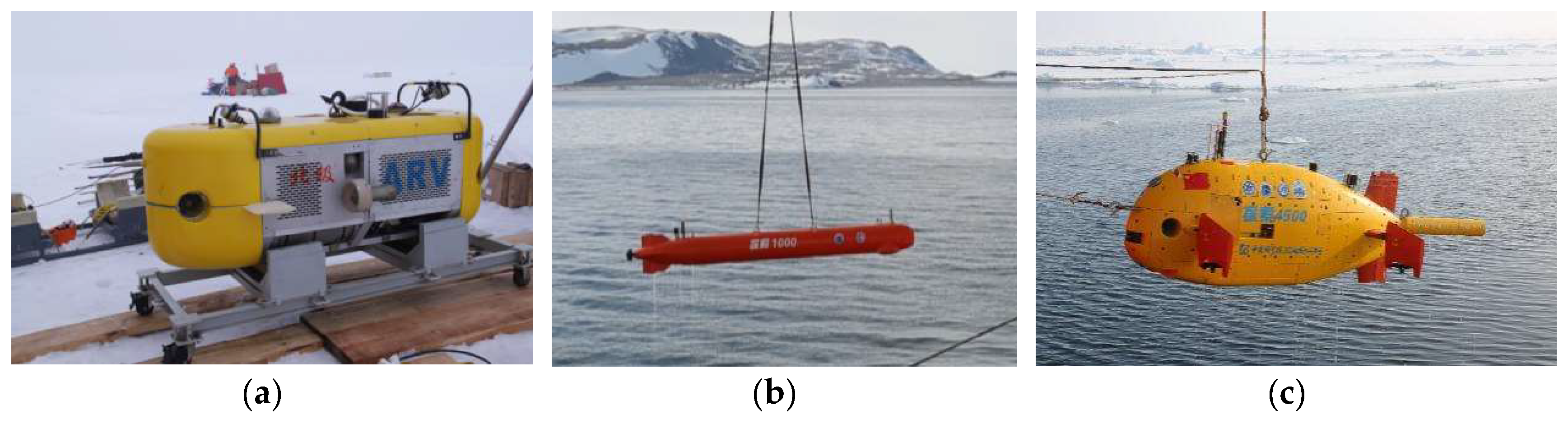
Figure 10.
Notable AUV deployments in polar regions (sea ice concentration data come from [96]). (a) AUV deployments in Arctic; (b) AUV deployments in Antarctic.
Figure 10.
Notable AUV deployments in polar regions (sea ice concentration data come from [96]). (a) AUV deployments in Arctic; (b) AUV deployments in Antarctic.
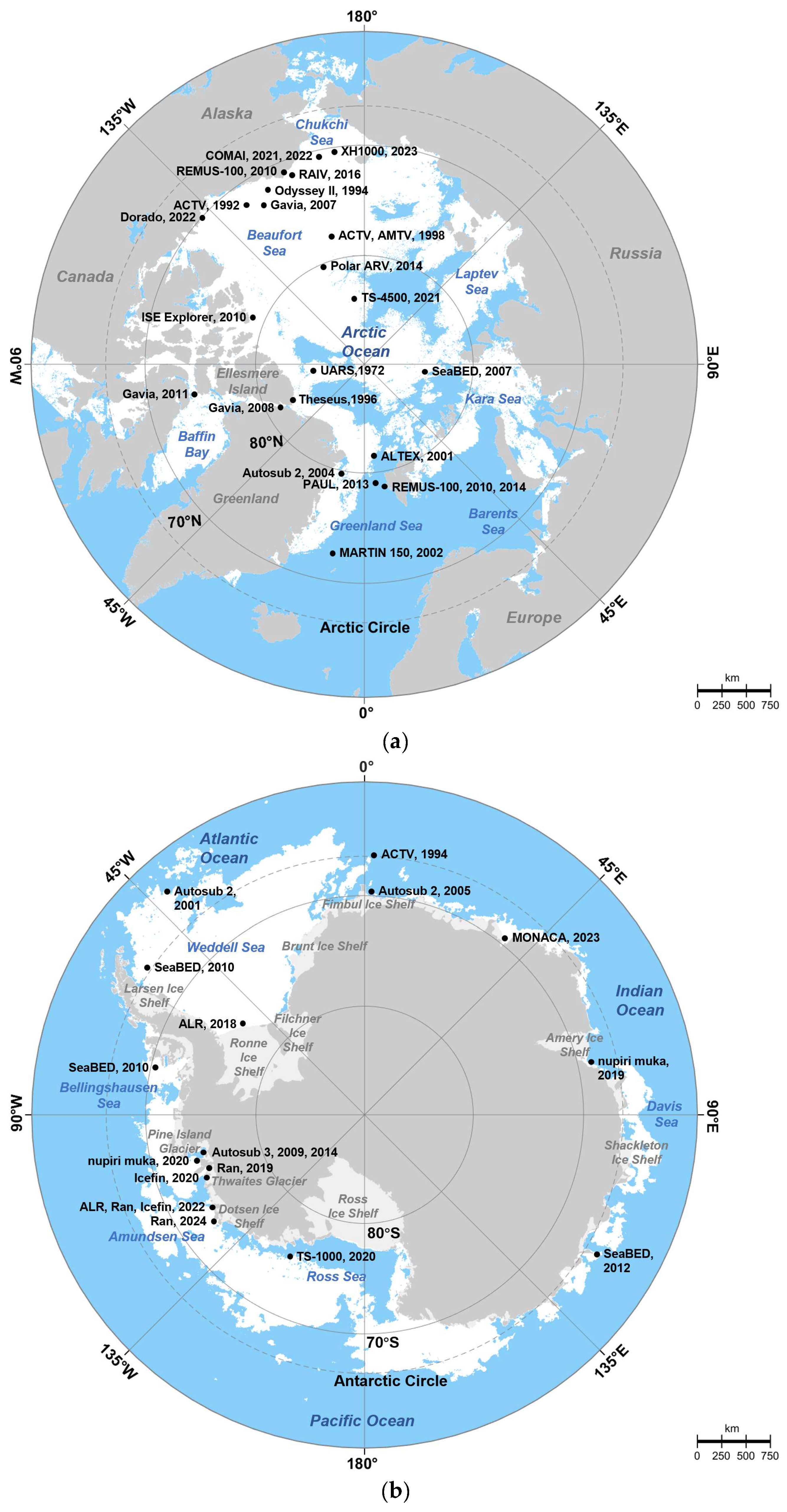
Figure 11.
The concept of Stand-Alone USBL Positioning Buoy system for under-ice AUV [3].
Figure 11.
The concept of Stand-Alone USBL Positioning Buoy system for under-ice AUV [3].
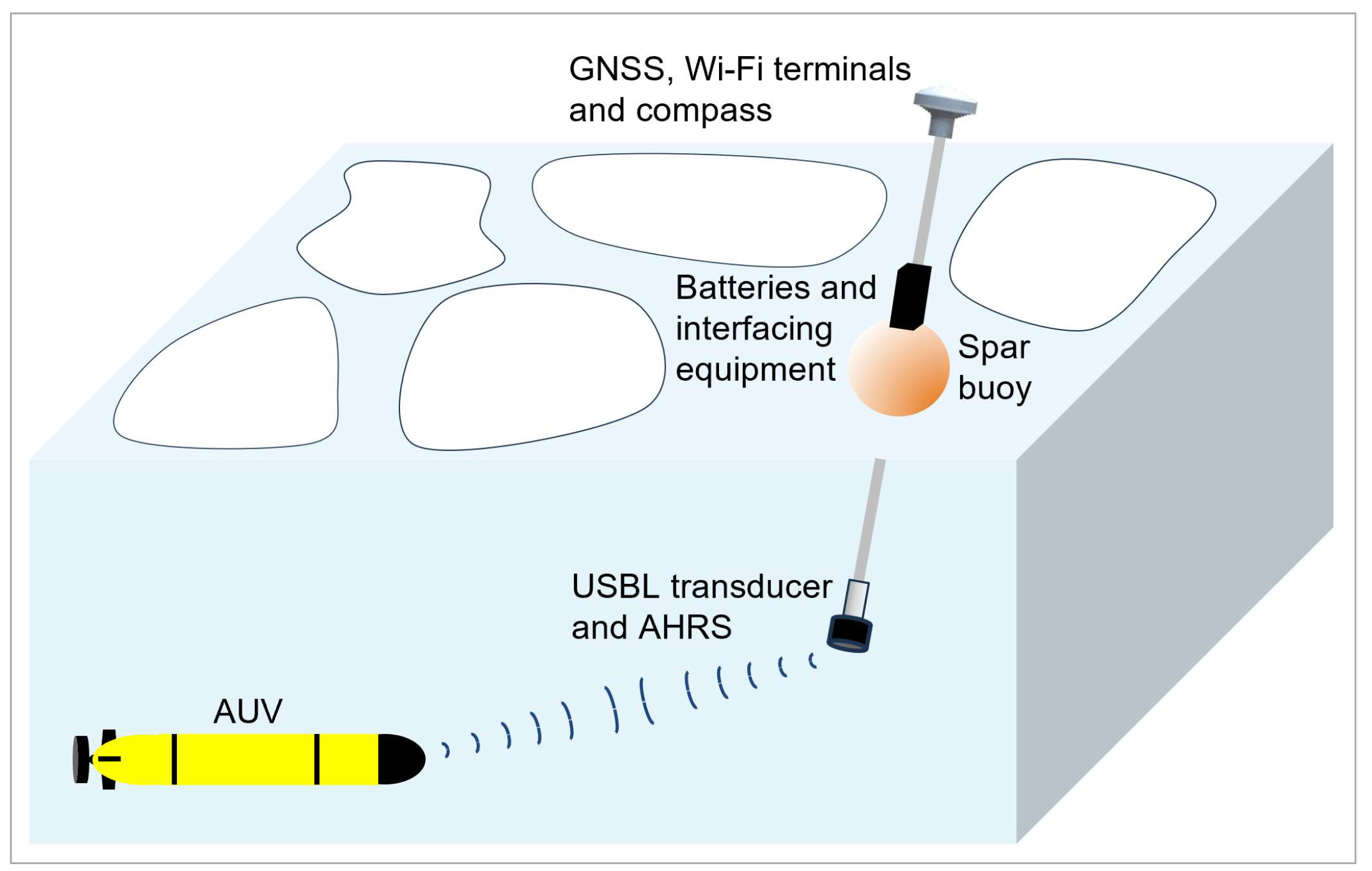
Figure 12.
Navigation buoy network estimating the velocity of ice drift for AUV operation [100]. Black arrow indicates the estimated velocity vector of ice drift.
Figure 12.
Navigation buoy network estimating the velocity of ice drift for AUV operation [100]. Black arrow indicates the estimated velocity vector of ice drift.
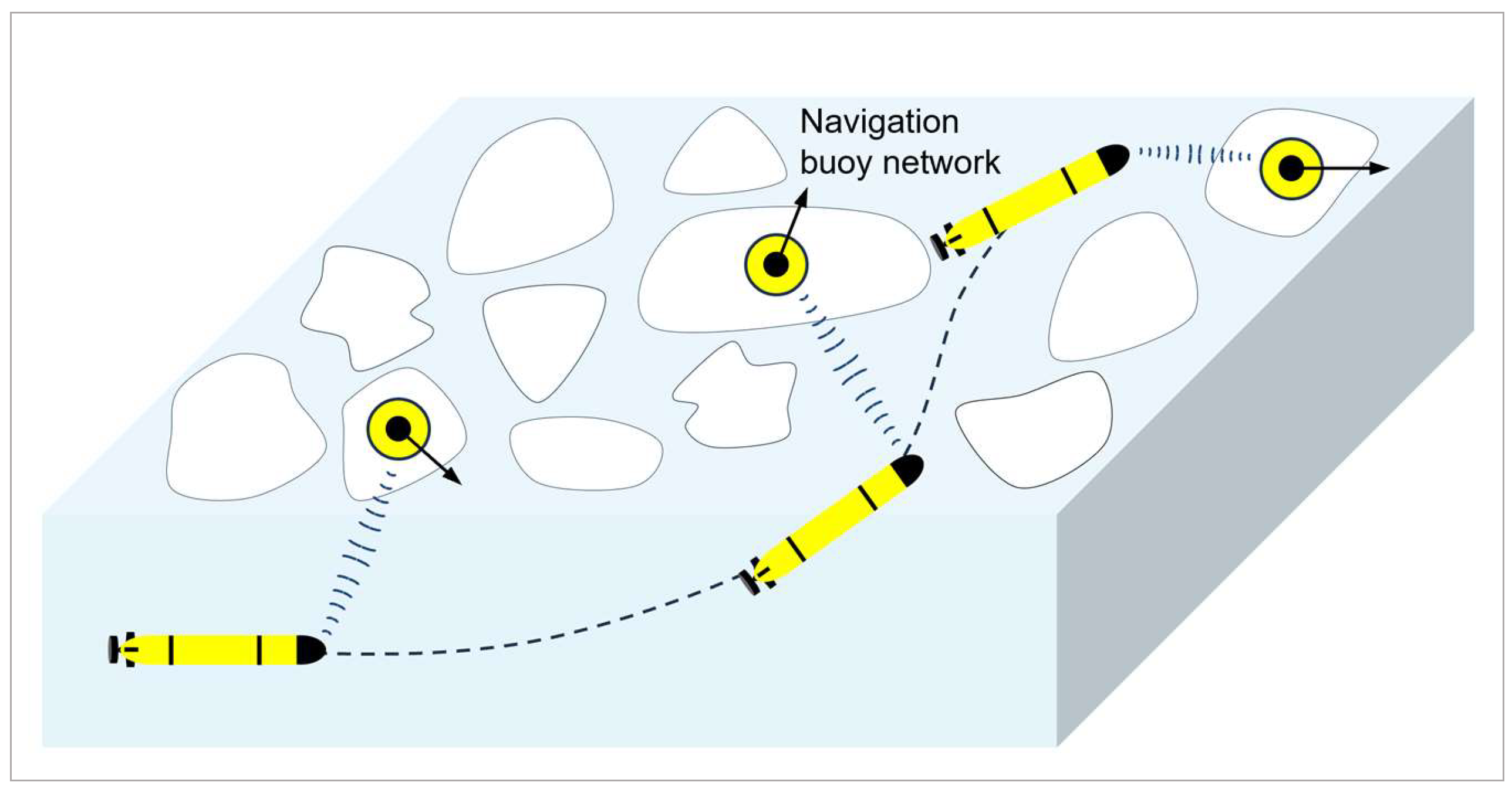
Figure 13.
nupiri muka AUV in front of the Sørsdal Glacier assisted by a boat (used with permission from [175]; Photo: Glenn Johnstone from Australian Antarctic Division).
Figure 13.
nupiri muka AUV in front of the Sørsdal Glacier assisted by a boat (used with permission from [175]; Photo: Glenn Johnstone from Australian Antarctic Division).

Figure 14.
Polar AUV capabilities under ice.
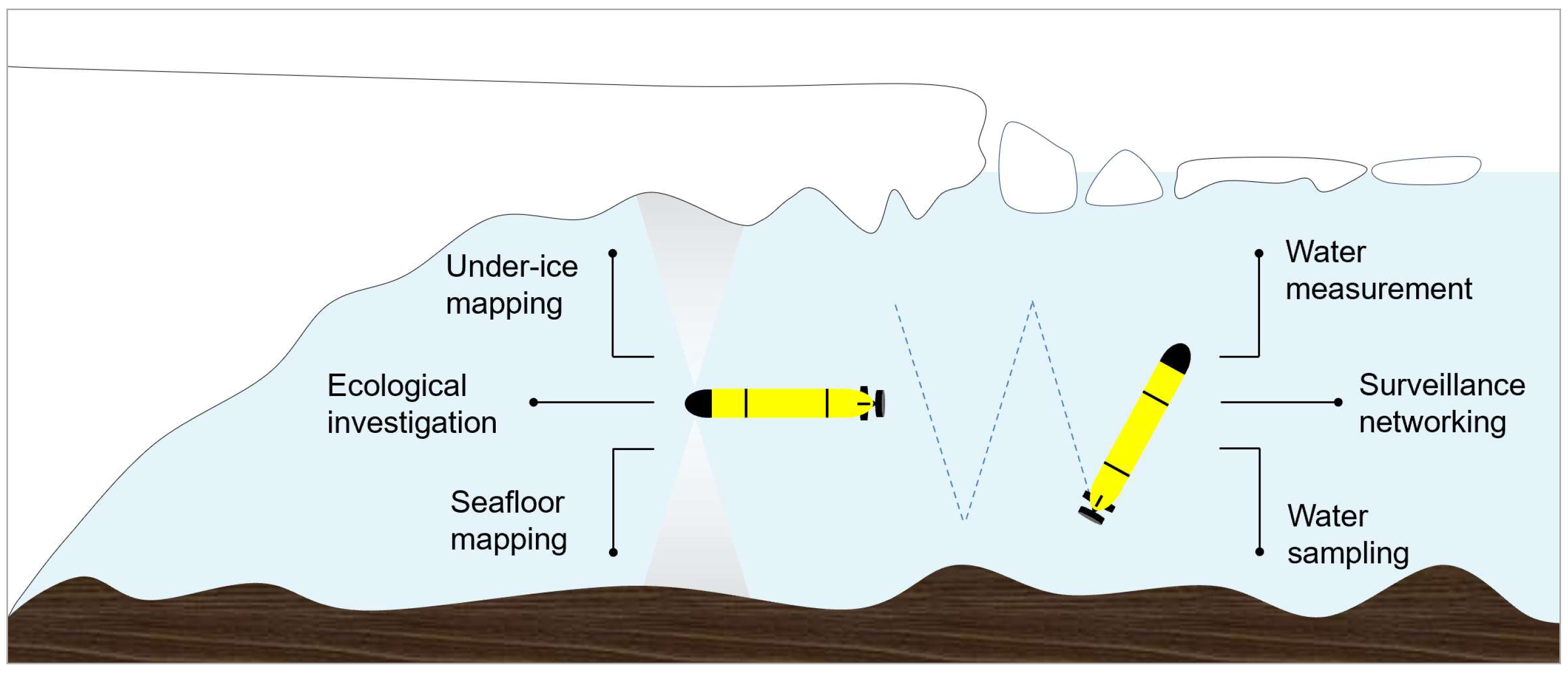
Figure 15.
Memorial University’s Explorer AUV deployed in Baffin Bay (used with permission from [194]). (a) AUV sitting on the launch and recovery system; (b) Hydrocarbon plume detectors; (c) Multi water sampler of KC-Denmark.
Figure 15.
Memorial University’s Explorer AUV deployed in Baffin Bay (used with permission from [194]). (a) AUV sitting on the launch and recovery system; (b) Hydrocarbon plume detectors; (c) Multi water sampler of KC-Denmark.
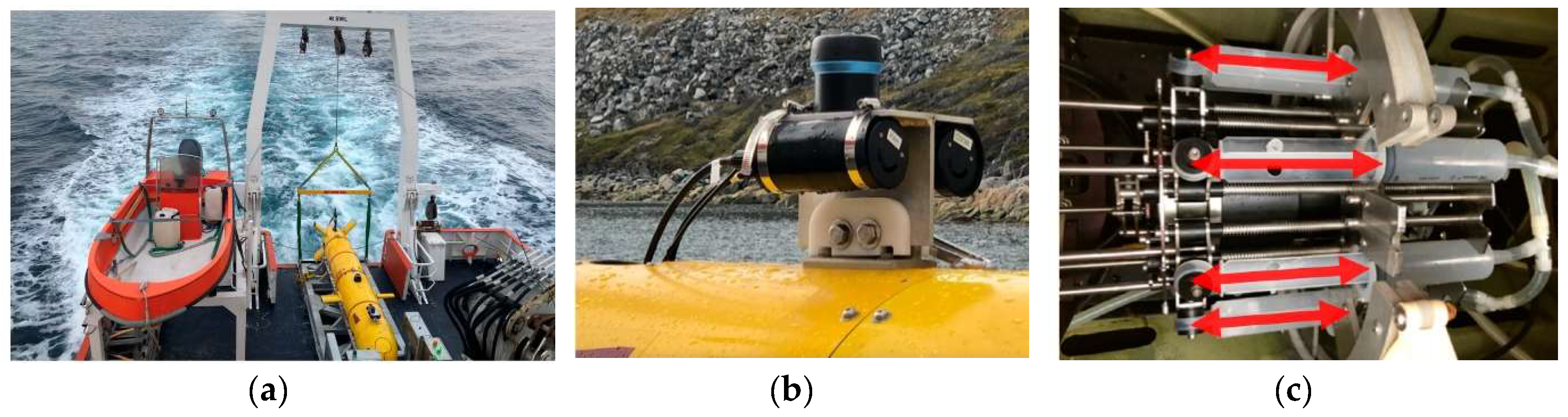
Table 1.
Known number of expeditions using AUVs in polar regions.
| Year | Arctic | Antarctic | Total |
|---|---|---|---|
| 1972 | 1 | 0 | 1 |
| 1992 | 1 | 0 | 1 |
| 1993 | 1 | 0 | 1 |
| 1994 | 2 | 1 | 3 |
| 1995 | 2 | 0 | 2 |
| 1996 | 2 | 0 | 2 |
| 1998 | 1 | 0 | 1 |
| 2001 | 1 | 1 | 2 |
| 2002 | 1 | 0 | 1 |
| 2003 | 0 | 1 | 1 |
| 2004 | 2 | 0 | 2 |
| 2005 | 0 | 2 | 2 |
| 2007 | 2 | 0 | 2 |
| 2008 | 3 | 1 | 4 |
| 2009 | 1 | 2 | 3 |
| 2010 | 6 | 2 | 8 |
| 2011 | 3 | 0 | 3 |
| 2012 | 2 | 2 | 4 |
| 2013 | 3 | 0 | 3 |
| 2014 | 1 | 3 | 4 |
| 2015 | 0 | 1 | 1 |
| 2016 | 5 | 0 | 5 |
| 2017 | 1 | 2 | 3 |
| 2018 | 1 | 1 | 2 |
| 2019 | 1 | 3 | 4 |
| 2020 | 0 | 2 | 2 |
| 2021 | 2 | 0 | 2 |
| 2022 | 2 | 1 | 3 |
| 2023 | 1 | 1 | 2 |
| 2024 | 0 | 1 | 1 |
| In total | 75 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



