
Submitted:
24 July 2024
Posted:
25 July 2024
You are already at the latest version
Abstract
Background: Monitoring the mobility of players during wheelchair sports is essential to support coaches in their understanding of the activity and in their training programming. However, the amount of information available from the monitoring tools, combined with a general approach to processing and a poor presentation of the data to the coaches, is not effective and remains unused. Thus, this study aimed to propose a simple and efficient algorithm for identifying locomotor tasks (static, forward/backward propulsion, pivot/tight/wide rotation) during wheelchair movements based on wheelchair kinematic data. Methods: A total of 36 wheelchair tennis and badminton players participated, completing at least one of three proposed tests: the star test, the figure-of-eight test, and the forward-backward test. Locomotor tasks were identified using a five steps procedure including data reduction, symbolic approximation and pattern logical search. Results: Using this method, 99% of locomotor tasks were properly identified for the star test, 95% for the figure-of-eight test and 100% for the forward-backward test. Conclusion: This method appears to be a valuable tool for a simple and clear identification and representation of locomotor tasks over extended periods of time. Future research should aim at applying this method to multiple wheelchair court sports matches or daily life declination.
Keywords:
method
; monitoring
; performance
; paralympic
1. Introduction
Measuring and monitoring wheelchair mobility are crucial aspects both in daily life and in sports. In daily life, activity level serves as an indicator of the quality of life and the health status of a manual wheelchair user [1]. Studies have particularly examined long-term mobility characteristics using accelerometers [2], data loggers [1], or even machine learning algorithms capable of classifying movements [3]. In Wheelchair Court Sports (WCS) like Wheelchair Basketball (WBas), Wheelchair Rugby (WRug), Wheelchair Tennis (WTen), or Wheelchair Badminton (WBad), monitoring wheelchair mobility during matches and training sessions can lead to a deeper understanding of game dynamics and of the athlete’s effort. Monitoring both external and internal loads aids in offering periodized training prescription and individualized training programs, and in preventing fatigue and injuries [4]. Many studies have attempted to track the physical efforts exerted by WCS athletes during a match using miniaturized data loggers [5], video cameras [6], heart rate monitors [7], indoor wireless tracking systems [8], or perceived efforts collected through Borg scales [9]. From these studies, it has been possible to describe these sports as intermittent aerobic exercises interspersed with brief periods of high-intensity work [10,11,12]. High-intensity activities are generally characterized by multidirectional movements involving rapid accelerations and high-speed rotations [13,14], except for WBad which predominantly involves unidirectional movement [15]. However, none of these studies have attempted to precisely describe the characteristics of each locomotor task, which is necessary to deeply understand the activity. The use of data loggers did not seem to be effective as measurement errors were revealed at high speeds [16]. New workload tracking techniques have emerged thanks to Global Positioning Systems (GPS) which provide quantification of location, volume, intensity, and frequency of activities performed [17]. However, WCS are primarily played indoors, where GPS is not reliable, and the dimensions of the courts are relatively small, so the level of detail and precision must be adjusted [16]. A new radio frequency-based indoor tracking system (ITS) has recently been developed, which utilises ultra-wideband signals to communicate with compact tags worn by athletes, providing real-time analysis on movement parameters [8]. However, in practical terms, implementing the ITS necessitates extensive setup and calibration. Additionally, as of now, there have been no reported data regarding acceleration or angular velocity using this system. Finally, activity patterns have been studied in WTen by defining physical variables such as effective playing time or total resting time and technical aspects such as the type of shot or the number of winning shots from videos [18,19]. However, this method requires a team of reviewers to manually note down each of those events, which is very labor intensive and time consuming. Therefore, all these tools did not seem relevant in describing locomotor tasks due to their reliability, cost, or time efficiency.
New technological advancements have enabled the development of smaller, lighter, and wireless Inertial Measurement Units (IMUs). In recent years, they have become accessible to research teams worldwide and sports federations staff, making in field experiments feasible and providing more ecological results. Their use in WCS is now well-defined and reported to be reliable for assessing wheelchair kinematics [20]. Their ability to gather a multitude of data about linear and rotational speed and acceleration performance is established. The three-sensor IMU configuration, which provides more robust measurements for linear and non-linear movements [20], has been used in numerous studies. For example, it has been employed to validate field tests for profiling purposes in WTen [21], to profile players’ performances during structured field tests [22] or to explore wheelchair configurations effectiveness [23,24]. During WCS matches, three IMUs have also been used to identify the characteristics of the main movements [14,25]. However, the proposed method did not provide information on the frequency and intensity of the different movements performed or on the number, duration, and distance of sprints and rotations, which are all data that are now essential to enable coaches and physical trainers to rely on evidence-based information in their approach and training programming [26]. Although that many data are required to achieve this goal, a massive data collection and a poor translation of this data can be hindrance for coaches. The vast range of data provided by these tools, as well as the way sports scientists present this data, may not seem relevant to coaches in practice and training contexts without a simplified method [27]. Amidst the wealth of information in sports, the integration of data exploration techniques and principles into time series analysis has spawned the concept known as Time Series Data Mining [28]. Among all techniques, the Symbolic Aggregate Approximation (SAX) has been developed to transform time series data into symbolic form and to reduce the dimensionality of time series data by discretizing the original data into a collection of symbolic string alphabets [29]. This method has notably been used for human action recognition [30] but has not been applied to wheelchair movements.
This study aimed to propose a simple and efficient method, based on logical search on several signals simultaneously, for detecting locomotor tasks and assessing, in a second time, their intensity during WCS matches, catering to coaches and sports scientists. The method developed also aimed to clearly represent each detected locomotor task. This method was applied in this study on standardized WCS tests necessitating several and known locomotor tasks. The hypothesis posited that the method would accurately identify all locomotor tasks.
2. Methods
Participants
Collecting data on tests with wheelchair badminton players and tennis players was approved by the National Ethics Committee for Research in the Physical Activity and Sports Sciences (CERSTAPS, IRB00012476-2021-11-06-274 and CERSTAPS n° IRB00012476-2021-31-03-97). A total of 36 wheelchair athletes, eighteen international wheelchair tennis players (twelve men and six women) and eighteen national wheelchair badminton players (eleven men and seven women) participated in this study. Among the wheelchair tennis players, thirteen competed in the Open division and five in the Quad division. The Open division, separated into a male and a female division, is comprised of players with a permanent lower limb impairment. Athletes with a permanent impairment in both upper and lower limbs compete in the Quad division, where men and women compete together [31]. Among wheelchair badminton players, eleven competed in in the wheelchair 1 category (WH1) and seven in the wheelchair 2 category (WH2). The WH1 category corresponds to manual wheelchair users with abdominal and lower limb paralysis, while the WH2 category corresponds to users with abdominal capabilities and lower limb paralysis with partial sensation and who may sometimes move in a vertical position using crutches or prostheses but only practice the sport in a wheelchair [32]. Participants’ characteristics are summarized in Table 1.
Protocols
The data used in this article were collected during WBad French championships and WTen training sessions. The tests presented below were therefore chosen by the staff for their relevance in evaluating player performance with respect to the characteristics of the respective disciplines. These tests were also chosen for this study because they are standardized and well-known, plus they consist of various locomotor tasks that arise during WCS. After being informed of the protocol, signing a written inform consent form and performing a warm-up, participant completed one of the three mobility tests proposed in this study: the star test, the figure-of-eight test or the forward-backward test. All tests were performed as fast as possible and are depicted in Figure 2. The star test consisted of 5 long back-and-forth displacements with alternative turns on spot of 180° and 120°. The outcome of this test was the time to perform the test. The figure-of-eight test consisted of performing a course by crossing directions and making 2 turns on the spot separated by five meters (allowing straightforward displacement between turns) for one minute. The forward-backward test consisted of forward and backward propulsion in a straight line over a distance of three meters for one minute. The outcome of these two tests was the number of eight or forward-backward completed. Participants used their own wheelchairs, and all tests were conducted with the tennis or badminton racket in dominant hand.
Regarding the number of participants with respect to each test, the star test was performed by 12 WTen players, the figure-of-eight test was performed by 10 WTen players and the forward-backward test was performed by the 18 WBad players. Some wheelchair tennis players performed both tests (star and figure-of-eight) on different days.
Equipment
Personal wheelchairs were equipped with three dimensional (x, y, and z-axis) Inertial Measurement Units (IMUs) measuring linear acceleration, angular velocity and magnetic field orientation (WheelPerf System, AtoutNovation, Versailles, France, 128 Hz). The IMUs were placed on the wheelchair’s frame (at the midpoint between both rear wheel centre) and on each rear wheel hub. Each acquisition was filmed using the tablet connected to the IMUs. The video recording served as a support in case of errors or questions for understanding the algorithm’s results.
Data Processing
IMUs data, more especially gyroscope data, were processed using the method extensively detailed in Poulet et al. study, [33], initially based on the equations described in the studies by Pansiot et al. [34] and Fuss [35]. Following this processing, four main variables were prioritized and were utilized in the method presented below:
- The absolute value of the angular velocity () of the wheelchair around the vertical axis [ in °/s], determined from the frame IMU.
- The wheelchair linear velocity () [in m/s] (more especially, the velocity of the midpoint between both rear wheels centres), determined from IMU on both rear wheels (obtained under the assumption that both rear wheels are rolling without slipping on ground).
- The absolute value of wheelchair linear velocity () [in m/s]
- The wheelchair curvature radius (), expressed in the MWC coordinate system and align with the line passing through both rear wheels centres under the condition of rolling without slipping of both rear wheel), [in m] from the following equation (Eq. 1) based on linear and angular velocities. R is the distance between the center of the wheelchair frame and the point around which the wheelchair rotates.
Symbolic Time Series Analysis
The idea of the following algorithm was to provide a symbolic representation of a displacement highlighting the different locomotor tasks that were performed. The different locomotor tasks sought were as follows: static phase, forward propulsion, backward propulsion, pivot rotation, tight rotation, wide rotation. Rotations were recorded on both the right and left sides. These locomotor tasks were selected because they are the most commonly encountered during daily or sports locomotion. The objective of the algorithm was to go from 4 synchronized times series (, , and ) to a symbolic time series of the locomotion tasks. For that purpose, the algorithm consists of 5 steps.
Step 1: data reduction
After processing and highlighting the four variables mentioned above, time series () was transformed into segments using Piecewise Aggregate Approximation (PAA), wherein the length of was divided into equal-sized “frames” [36]. In this study, a PAA segment was set every 25 values, and the mean value of the data falling within each segment was retained. A vector comprising these mean values became the data-reduced representation (Figure 1). The objectives of this step were to reduce the size of the signal and to decrease the fickleness of the identified situations.
Step 2: Symbolic Aggregate approximation (SAX)
After reducing , the previously calculated mean values for each PAA segment were replaced by an alphabetic value equal to a, b, c or d, based on predetermined thresholds specified in Table 2, transforming the four previous signals in string vectors (SAX signals). These thresholds were arbitrarily tuned based on the previous knowledge of the research team.
Step 3: logical search for locomotion task.
From the four signals transformed into SAX signals, combinations of letters, between the signals were sought to define the different locomotor tasks. As described in Table 3, logical patterns were used to identify the different locomotor tasks, and these tasks were detected when the combination of value series matched one of the identified locomotor tasks. Thus, for example, the pattern for the static phase was constructed from the signals of and . If the series contained “b” (i.e., < 0.05) and the series also contained “b” (i.e., < 40) at the same index, it meant that the athlete was neither moving forward nor turning, and therefore was in a static phase. The same logical analysis has been adopted for patterns definitions for all locomotor tasks to be detected.
Step 4: temporal and special symbolic representation
As soon as the combination of signals matched one of the predefined patterns (Table 3), a letter representing the detected locomotor task was assigned in a new field. The letters were defined as follows: ‘A’ for the static phase, ‘B’ for forward straight-line movement, ‘C’ for backward straight-line movement, ‘D’ for pivot rotation, ‘E’ for tight rotation, and ‘F’ for wide rotation. Thus, the final resulting signal was then composed solely of those letters representing the wheelchair user’s activity. For a clearer representation of locomotor tasks, each letter was then associated with a color for graphical representation as described in Table 3. The different colors used were as follows:
- -
- A (static): red
- -
- B (forward propulsion): green
- -
- C (backward propulsion): yellow
- -
- D (pivot rotation): pink
- -
- E (tight rotation): cyan
- -
- F (wide rotation): blue
The representation with colors, as described in Figure 2, allowed for a more visual and simplified description of the performed locomotor tasks.
Step 5: actual task feature extraction.
Finally, once all locomotor tasks were detected, a final processing step was implemented to reduce the variability of actions. This involved instructing the algorithm, after obtaining the final total activity, that if one segment of a locomotor task was surrounded by several segments of another locomotor task, it would become that locomotor task in order to create a single and unified action. For example, if the algorithm detected multiple consecutive segments of straight lines but one wide turn segment was found in the middle of them, then the wide turn would be transformed into a straight line. After finishing the processing, we could analyze the locomotor tasks by pulling out the key kinematics data from the IMUs. This data describes how intense the action was, from the beginning of the task to the end.
3. Results
Since the chosen tests were standardized tests with precise and known trajectories, the following locomotor tasks: forward propulsion, backward propulsion, and rotations were counted using the algorithm. These counts were then compared with the number of round trips on the forward-backward test, or the number of laps counted on the figure-of-eight test on the day of experimentation. The following locomotor tasks: pivot rotation, tight rotation and wide rotation were all grouped together in the rotations category because it was impossible to differentiate them visually on the day of the experiment. The algorithm provided us with details on the athlete’s strategy during the tests. Table 4, summarizing the number of locomotor tasks inferred on the day of experimentation and detected by the algorithm for each test, demonstrates that locomotor tasks were accurately identified by the SAX algorithm, as indicated by the low coefficient of variation (maximum 3.6 % for figure-of-eight test). These findings were further supported by the graphical representation of locomotor activity and wheelchair trajectory across the three tests conducted (Figure 3). However, for one out of the 10 athletes recorded during the figure-of-eight test, 20 straight lines and 19 rotations were carried out, whereas the SAX algorithm only detected 12 straight lines and 12 rotations (Figure 3). This represents a reduction of no less than 40% in detected locomotor tasks by the SAX algorithm.
4. Discussion
The objective of this study was to propose a simple and convenient method for detecting and representing locomotor tasks and their intensity using gyroscope data from inertial measurement units. We hypothesized that the proposed method would accurately identify all searched locomotor tasks: static; forward and backward propulsions; and pivot, thigh and wide rotations. The evaluation described in this article demonstrates that the use of IMU gyroscope data coupled with the proposed algorithm allows for an accurate determination of the locomotor tasks performed. This method has notably been applied to a battery of tests carried out at very high intensity by national-level WTen and WBad athletes. Based on the proposed thresholds, all recordings were encompassed by locomotor tasks corresponding to the algorithm’s instructions. For each test, a comparison between the number of locomotor tasks deduced from the number of round trips or laps completed on the tests and the number of locomotor tasks defined by the algorithm validates the method employed. This comparison revealed an average similarity of 99 % between the two methods for the star test, of 100 % for the forward-backward test and of 95% for the figure-of-eight test. The visual application of locomotor tasks on the trajectory of the course (Figure 2) also reinforces the validity of the employed method.
The analysis technique utilized to measure wheelchair movement in this study, and the validation performed, presents several advantages and limitations when juxtaposed with existing methods for monitoring wheelchair activity. The proposed algorithm could complement the overall analysis conducted during matches using the IMUs installed on the wheelchair [14,25] by providing a detailed and representative description of each movement performed. Information such as the number of sprints, their duration, the distance covered, and the type of rotations seems to be essentials elements for coaches in understanding the activity. Other studies have also characterized on-field mobility intensity during matches based on arbitrary speed zones [5,37]. However, these processing methods do not provide a precise description of locomotor tasks or their evolution throughout the match. The proposed method could thus be employed to comprehend mobility characteristics throughout a match, as well as movement strategies depending on score evolution, fatigue, or other factors. Another advantage of the proposed methodology is its applicability to various situations, whether in everyday life or in sports, provided that the thresholds used are validated. Indeed, additional signals derived for the same initial IMU signals can be included and the algorithm’s thresholds could be adjusted in order to accommodate different applications, such as monitoring mobility in daily life or tracking mobility during confrontational sports like WRug or WBas. Future research using this method for detecting locomotor tasks are thus encourage to provide details – as supplementary material for instance - on segment length (PAA step), signals used, applied threshold (SAX step) and pattern recognition for tasks identification.
In the present study, for one out of the ten recordings of the figure-of-eight test, the algorithm detected 40% fewer locomotor tasks. This result can be explained by the different propulsion mode used by the athlete. Indeed, this athlete adopted an asynchronous propulsion mode (i.e., alternating propulsions between left and right wheels), leading to frame rotation around its vertical axis. Consequently, although the locomotor task was expected as a straight line in our test, the algorithm detected wide rotations. A more detailed analysis (based on the video data) reveals that the actual trajectory of the wheelchair athlete is less straightforward between rotation as expected in the test. In wheelchair sports, some athletes favor asynchronous propulsion and coaches could potentially wanted some propulsion segment performed in asynchronous mode being classified as straightforward rather that alternative left/right wide rotations. In this case, additional correction steps could easily be applied both by including the angular velocity direction as an input signal and defining a threshold of maximal global rotation per push, for instance.
Despite these limitations, this article provided evidence of the feasibility of analyzing mobility characteristics from gyroscopic data and the proposed algorithm. Even if tuned manually based on team experience that can be seen as a limitation, the proposed thresholds appear to already work in the context of standardized tests. Hence, both the signals and thresholds proposed in this study already provide a foundation and they can be adjusted for a better specificity of the algorithm to a specific use of the wheelchair or for a greater refinement in task type detection. Furthermore, this method provides a simple and clear representation for coaching staff in activity analysis. Finally, future research applying this processing method to WCS matches could lead to a better understanding of mobility characteristics. Daily life declination could also be envisaged for locomotor task monitoring in addition of current methodologies.
Author Contributions
Conceptualization, M.D., C.S. and A.F.; Methodology, M.D. and C.S.; Software, M.D. and Y.P.; Validation, M.D., C.S., A.H and A.F.; Formal Analysis, M.D. and C.S.; Investigation, M.D., I.A. and L.H.; Resources, M.D.; Data Curation, M.D., I.A. and L.H.; Writing – Original Draft Preparation, M.D. and C.S.; Writing – Review & Editing, C.S., Y.P., I.A., L.H., A.H. and A.F.; Supervision, C.S., A.H. and A.F.; Project Administration, A.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted according to the guidelines of the Declaration of Helsinki, and approved by the National Ethics Committee (IRB00012476-2021-11-06-274 / IRB00012476-2021-31-03-97).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study. Written informed consent was obtained from the patient(s) to publish this paper.
Data Availability Statement
Data are available upon reasonable request from the corresponding author.
Acknowledgments
This work was supported by the French Tennis Federation.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tolerico, M.L.; Ding, D.; Cooper, R.A.; Spaeth, D.M.; Fitzgerald, S.G.; Cooper, R.; Kelleher, A.; Boninger, M.L. Assessing Mobility Characteristics and Activity Levels of Manual Wheelchair Users. J. Rehabil. Res. Dev. 2007, 44, 561–571. [Google Scholar] [CrossRef] [PubMed]
- Sonenblum, S.E.; Sprigle, S.; Caspall, J.; Lopez, R. Validation of an Accelerometer-Based Method to Measure the Use of Manual Wheelchairs. Med. Eng. Phys. 2012, 34, 781–786. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Liu, T.; Jones, M.; Qian, G.; Jan, Y.K. Characterization of Wheelchair Maneuvers Based on Noisy Inertial Sensor Data: A Preliminary Study. Ann Int Conf IEEE Eng. Med. Biol. Soc. 2014, 2014, 1731–1734. [Google Scholar] [CrossRef]
- Bourdon, P.C.; Cardinale, M.; Murray, A.; Gastin, P.; Kellmann, M.; Varley, M.C.; Gabbett, T.J.; Coutts, A.J.; Burgess, D.J.; Gregson, W.; et al. Monitoring Athlete Training Loads: Consensus Statement. Int. J. Sports Physiol. Perform. 2017, 12, 161–170. [Google Scholar] [CrossRef] [PubMed]
- Sindall, P.; Lenton, J.; Cooper, R.; Tolfrey, K.; Goosey-Tolfrey, V. Data Logger Device Applicability for Wheelchair Tennis Court Movement. J. Sports Sci. 2015, 33, 527–533. [Google Scholar] [CrossRef] [PubMed]
- Sánchez-Pay, A.; Sanz-Rivas, D. Physical and Technical Demand in Professional Wheelchair Tennis on Hard, Clay and Grass Surfaces: Implication for Training. Int. J. Perform. Anal. Sport 2021, 21, 463–476. [Google Scholar] [CrossRef]
- Roy, J.; Menear, K.; Schmid, M.; Hunter, G.; Malone, L. Physiological Responses of Skilled Players during a Competitive Wheelchair Tennis Match. J. Strength Cond. Res. 2006, 20, 665–671. [Google Scholar] [PubMed]
- Rhodes, J.; Mason, B.; Perrat, B.; Smith, M.; Goosey-tolfrey, V. The Validity and Reliability of a Novel Indoor Player Tracking System for Use within Wheelchair Court Sports. J. Sports Sci. 2014, 32, 1639–1647. [Google Scholar] [CrossRef] [PubMed]
- Mason, B.S.; van der Slikke, R.M.A.; Hutchinson, M.J.; Goosey-Tolfrey, V.L. Division, Result and Score Margin Alter the Physical and Technical Performance of Elite Wheelchair Tennis Players. J. Sports Sci. 2020, 38, 937–944. [Google Scholar] [CrossRef] [PubMed]
- Rhodes, J.M.; Mason, B.S.; Malone, L.A.; Goosey-Tolfrey, V.L. Effect of Team Rank and Player Classification on Activity Profiles of Elite Wheelchair Rugby Players. J. Sports Sci. 2015, 33, 2070–2078. [Google Scholar] [CrossRef]
- Bloxham, L.A.; Bell, G.J.; Bhambhani, Y.; Steadward, R.D. Time Motion Analysis and Physiological Profile of Canadian World Cup Wheelchair Basketball Players. Sport. Med. Train. Rehabil. 2001, 10, 183–198. [Google Scholar] [CrossRef]
- Sindall, P.; Lenton, J.P.; Tolfrey, K.; Cooper, R.A.; Oyster, M.; Goosey-Tolfrey, V.L. Wheelchair Tennis Match-Play Demands: Effect of Player Rank and Result. Int. J. Sports Physiol. Perform. 2013, 8, 28–37. [Google Scholar] [CrossRef]
- Rietveld, T.; Vegter, R.J.K.; van der Slikke, R.M.A.; Hoekstra, A.E.; van der Woude, L.H.V.; de Groot, S. Six Inertial Measurement Unit-Based Components Describe Wheelchair Mobility Performance during Wheelchair Tennis Matches. Sport. Eng. 2023, 26. [Google Scholar] [CrossRef]
- van der Slikke, R.M.A.; Berger, M.A.M.; Bregman, D.J.J.; Veeger, D.H.E.J. Wearable Wheelchair Mobility Performance Measurement in Basketball, Rugby, and Tennis: Lessons for Classification and Training. Sensors (Switzerland) 2020, 20, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Alberca, I.; Watier, B.; Chénier, F.; Brassart, F.; Faupin, A. Wheelchair Badminton: A Narrative Review of Its Specificities. Biomechanics 2024, 4, 219–234. [Google Scholar] [CrossRef]
- Sindall, P.; Lenton, J.P.; Whytock, K.; Tolfrey, K.; Oyster, M.L.; Cooper, R.A.; Goosey-Tolfrey, V.L. Criterion Validity and Accuracy of Global Positioning Satellite and Data Logging Devices for Wheelchair Tennis Court Movement. J. Spinal Cord Med. 2013, 36, 383–393. [Google Scholar] [CrossRef]
- Cummins, C.; Orr, R.; O’Connor, H.; West, C. Global Positioning Systems (GPS) and Microtechnology Sensors in Team Sports: A Systematic Review. Sport. Med. 2013, 43, 1025–1042. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Pay, A.; Torres-Luque, G.; Sanz-Rivas, D. Activity Patterns in Male and Female Wheelchair Tennis Matches. Kinesiology 2017, 49, 41–46. [Google Scholar] [CrossRef]
- Mason, B.S.; van der Slikke, R.M.A.; Hutchinson, M.J.; Goosey-Tolfrey, V.L. Division, Result and Score Margin Alter the Physical and Technical Performance of Elite Wheelchair Tennis Players. J. Sports Sci. 2020, 38, 937–944. [Google Scholar] [CrossRef] [PubMed]
- van der Slikke, R.M.A.; Berger, M.A.M.; Bregman, D.J.J.; Lagerberg, A.H.; Veeger, H.E.J. Opportunities for Measuring Wheelchair Kinematics in Match Settings; Reliability of a Three Inertial Sensor Configuration. J. Biomech. 2015, 48, 3398–3405. [Google Scholar] [CrossRef] [PubMed]
- Rietveld, T.; Vegter, R.J.K.; van der Slikke, R.M.A.; Hoekstra, A.E.; van der Woude, L.H.V.; De Groot, S. Wheelchair Mobility Performance of Elite Wheelchair Tennis Players during Four Field Tests: Inter-Trial Reliability and Construct Validity. PLoS One 2019, 14, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Bakatchina, S.; Weissland, T.; Astier, M.; Pradon, D.; Faupin, A. Performance, Asymmetry and Biomechanical Parameters in Wheelchair Rugby Players. Sport. Biomech. 2021, 00, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Haydon, D.S.; Pinder, R.A.; Grimshaw, P.N.; Robertson, W.S.P. Using a Robust Design Approach to Optimize Chair Set-up in Wheelchair Sport 2018, 482. [CrossRef]
- Van Der Slikke, R.M.A.; De Witte, A.M.H.; Berger, M.A.M.; Bregman, D.J.J.; Veeger, D.J.H.E.J. Wheelchair Mobility Performance Enhancement by Changing Wheelchair Properties: What Is the Effect of Grip, Seat Height, and Mass? Int. J. Sports Physiol. Perform. 2018, 13, 1050–1058. [Google Scholar] [CrossRef] [PubMed]
- Rietveld, T.; Vegter, R.J.K.; van der Slikke, R.M.A.; Hoekstra, A.E.; van der Woude, L.H.V.; de Groot, S. Six Inertial Measurement Unit-Based Components Describe Wheelchair Mobility Performance during Wheelchair Tennis Matches. Sport. Eng. 2023, 26, 1–9. [Google Scholar] [CrossRef]
- Bishop, D.; Burnett, A.; Farrow, D.; Gabbett, T.; Newton, R. Sports-Science Roundtable: Does Sports-Science Research Influence Practice? Int. J. Sports Physiol. Perform. 2006, 1, 161–168. [Google Scholar] [CrossRef] [PubMed]
- Bishop D An Applied Research Model for the Sport Sciences. Sport. Med. 2008, 38, 253–263. [CrossRef] [PubMed]
- Fu, T.C. A Review on Time Series Data Mining. Eng. Appl. Artif. Intell. 2011, 24, 164–181. [Google Scholar] [CrossRef]
- Lin, J.; Keogh, E.; Wei, L.; Lonardi, S. Experiencing SAX: A Novel Symbolic Representation of Time Series. Data Min. Knowl. Discov. 2007, 15, 107–144. [Google Scholar] [CrossRef]
- Junejo, I.N.; Aghbari, Z. Al Using SAX Representation for Human Action Recognition. J. Vis. Commun. Image Represent. 2012, 23, 853–861. [Google Scholar] [CrossRef]
- ITF Wheelchair Tennis Classification Rules. 2023.
- BWF Para Badminton Classification. 2020.
- Poulet, Y.; Brassart, F.; Simonetti, E.; Pillet, H.; Faupin, A.; Sauret, C. Analyzing Intra-Cycle Velocity Profile and Trunk Inclination during Wheelchair Racing Propulsion. Sensors 2023, 23, 1–13. [Google Scholar] [CrossRef]
- Pansiot, J.; Zhang, Z.; Lo, B.; Yang, G.Z. WISDOM: Wheelchair Inertial Sensors for Displacement and Orientation Monitoring. Meas. Sci. Technol. 2011, 22. [Google Scholar] [CrossRef]
- Fuss, F.K. Speed Measurements in Wheelchair Sports – Theory and Application. Sport. Technol. 2012, 5, 29–42. [Google Scholar] [CrossRef]
- Keogh, E.; Chakrabarti, K.; Pazzani, M.; Mehrotra, S. Dimensionality Reduction and Similarity Search in Large Time Series Databases. Knowl. Inf. Syst. 2001, 3, 263–286. [Google Scholar] [CrossRef]
- Rhodes, J.M.; Mason, B.S.; Perrat, B. Activity Profiles of Elite Wheelchair Rugby Players during Competition. Int. J. Sports Physiol. Perform. 2015, 10, 318–324. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
An example of time series converted to PAA segments.
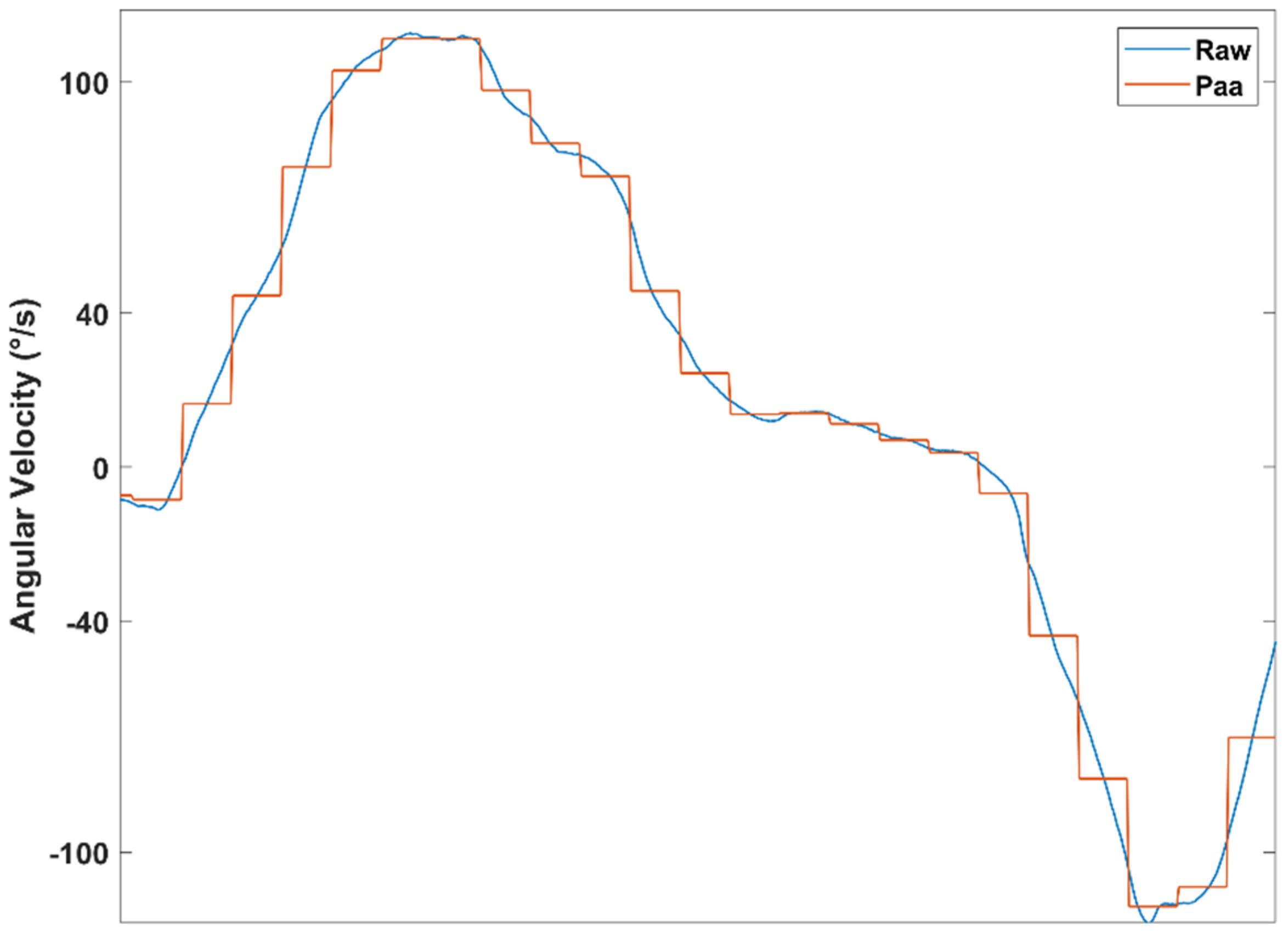
Figure 2.
Identification of locomotor tasks and representation of trajectories (on the right) from the three field tests conducted (A: forward-backward test; B: star test; C: figure-of-eight test). Each color is associated with locomotor tasks (green: forward propulsion; yellow: backward propulsion; red: static phase; blue: wide rotation). On the bottom part, colors are depicted on the chassis yaw angular velocity signals. In the graph representing the locomotor tasks of the figure-of-eight test, the frame composed of dashed lines is used to represent left turns (positive values), and the frame composed of dots is used to represent right turns (negative values).
Figure 2.
Identification of locomotor tasks and representation of trajectories (on the right) from the three field tests conducted (A: forward-backward test; B: star test; C: figure-of-eight test). Each color is associated with locomotor tasks (green: forward propulsion; yellow: backward propulsion; red: static phase; blue: wide rotation). On the bottom part, colors are depicted on the chassis yaw angular velocity signals. In the graph representing the locomotor tasks of the figure-of-eight test, the frame composed of dashed lines is used to represent left turns (positive values), and the frame composed of dots is used to represent right turns (negative values).
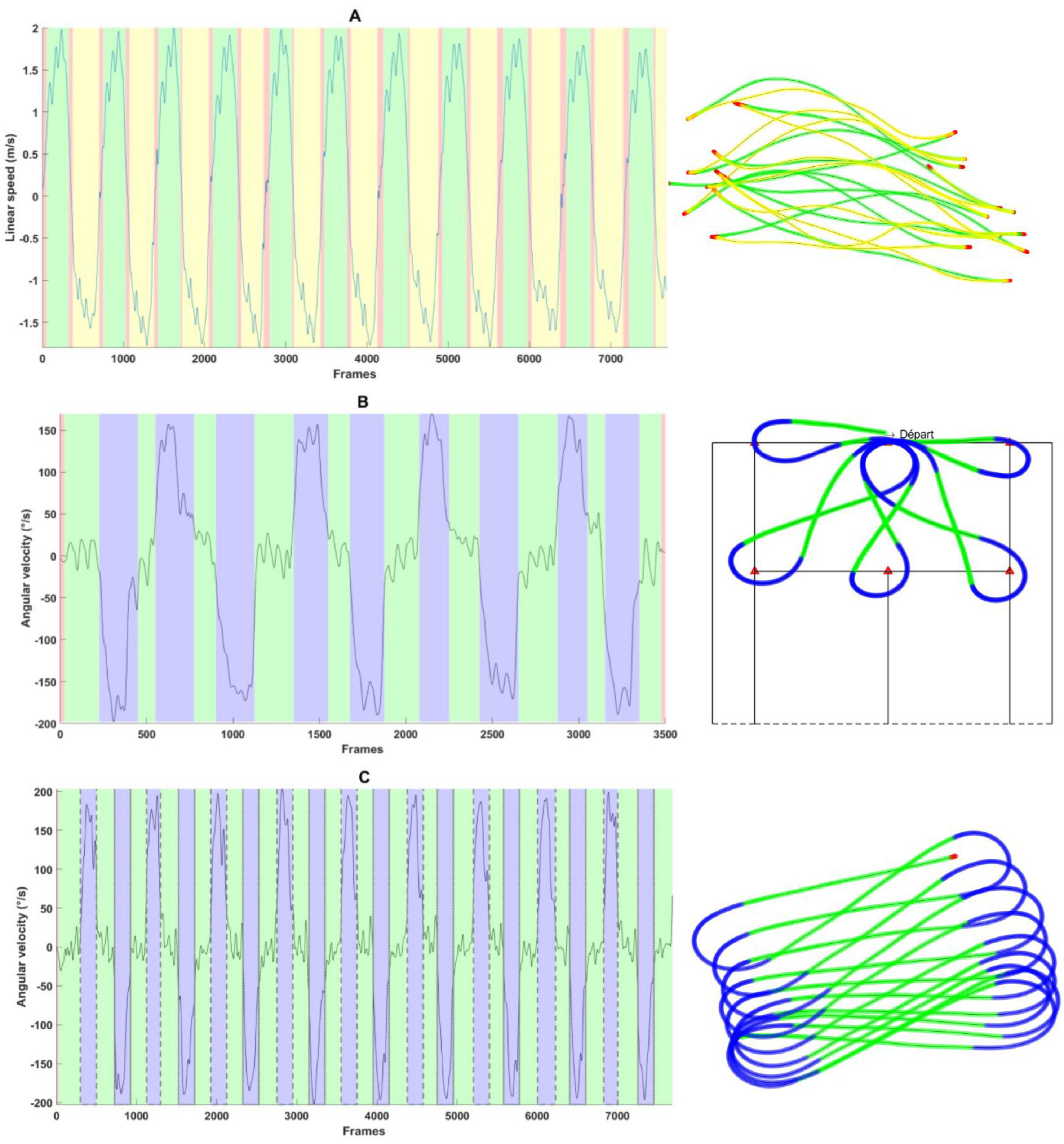
Figure 3.
Representation of the locomotor tasks detected using the SAX algorithm for the athlete with an asynchronous propulsion during the figure-of-eight test. The colors are depicted on the chassis yaw angular velocity signal that exhibited alternance of positive and negative values meaning that the turning direction changed during the full recognized wide rotation task.
Figure 3.
Representation of the locomotor tasks detected using the SAX algorithm for the athlete with an asynchronous propulsion during the figure-of-eight test. The colors are depicted on the chassis yaw angular velocity signal that exhibited alternance of positive and negative values meaning that the turning direction changed during the full recognized wide rotation task.
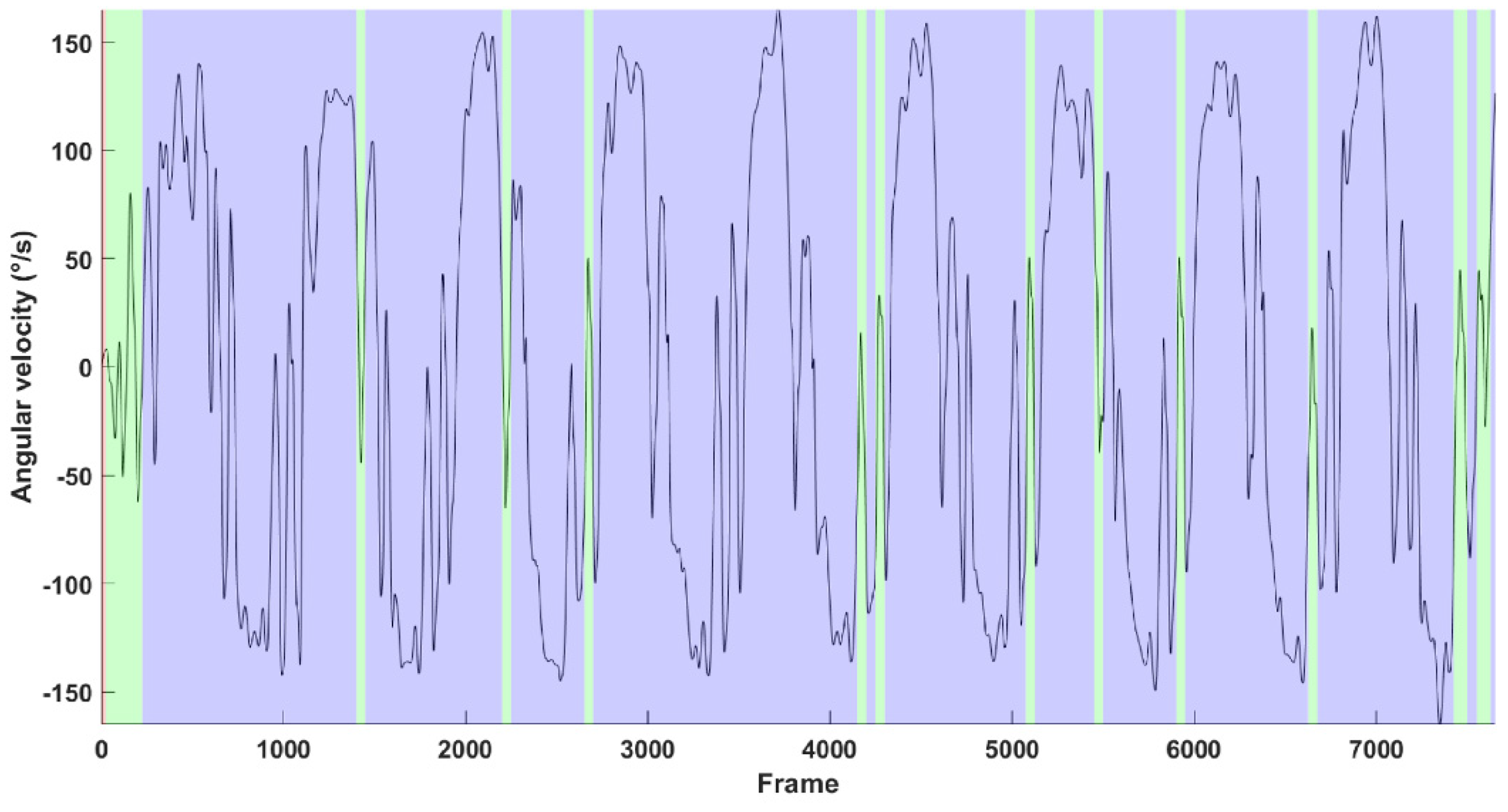

Table 1.
Participants’ characteristics, mean (SD).
| Wheelchair tennis | Wheelchair badminton | ||||
|---|---|---|---|---|---|
| Characteristics |
Total (n = 36) |
Open (m = 8 / f = 5) |
Quad (m = 4 / f = 1) |
WH1 (m = 7 / f = 4) |
WH2 (m = 4 / f = 3) |
| Age (years) | 40 (9.5) | 36.2 (11.1) | 44 (5.8) | 43.9 (6.1) | 40 (10.9) |
| Mass (kg) | 66.7 (13) | 66.7 (16.9) | 69.4 (11.5) | 69 (10) | 61 (9.9) |
| Years of training | 9.2 (6.5) | 12.3 (8) | Unknown | 7 (2.7) | 7.1 (5.3) |
Table 2.
A summary of the thresholds used to replace the PAA segment values into classes from labeled a, b, c or d.
Table 2.
A summary of the thresholds used to replace the PAA segment values into classes from labeled a, b, c or d.
| a | b | c | d | |
|---|---|---|---|---|
| (m/s) | ≤ 0.05 | 0.05 < v < 0.5 | ≥ 0.5 | |
| (m/s) | ≤ -0.05 | -0.05 < v < 0.05 | ≥ 0.05 | |
| (°/s) | < 40 | > 40 | ||
| (m) | ≤ 0.2 | 0.2 < < 0.5 | ≥ 0.5 |
Table 3.
Identification of locomotor tasks based on signal combination (step 3) and assignment of a letter and color to each locomotor task (step 4).
Table 3.
Identification of locomotor tasks based on signal combination (step 3) and assignment of a letter and color to each locomotor task (step 4).
| Static | Forward propulsion | Backward propulsion | Pivot rotation | Tight rotation | Wide rotation | |
|---|---|---|---|---|---|---|
| b b b | d d d | d d d | ||||
| b b b | b b b | b b b | c c c | c c c | c c c | |
| c c c | a a a | |||||
| b b b | c c c | d d d | ||||
| A A A | B B B | C C C | D D D | E E E | F F F |
Table 4.
A summary of the number of locomotor tasks counted both through observations and detected by the SAX method across the three tests, mean (SD).
Table 4.
A summary of the number of locomotor tasks counted both through observations and detected by the SAX method across the three tests, mean (SD).
| Tests | Figure-of-eight test | Star test | FP-BP test | |||
|---|---|---|---|---|---|---|
| FP | Rotations | FP | Rotations | FP | BP | |
| Observations | 20 (1.3) | 19 (1.6) | 10 | 9 | 12 (1.8) | 11 (1.9) |
| SAX method | 19 (2.7) | 19 (3.0) | 10 (0.6) | 9 (0.3) | 12 (1.8) | 11 (1.9) |
| CV (%) | 3.6 | 3.4 | 1.2 | 0.7 | 0 | 0 |
Note. FP: Forward Propulsion, BP: Backward Propulsion, CV: Coefficient of Variation.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



