Submitted:
24 July 2024
Posted:
25 July 2024
You are already at the latest version
Abstract
With more companies entering the realm of electric vertical take-off and landing (eVTOL), and governments enacting policies to support the development of low-altitude economies, the commercial potential of eVTOL is being recognized by the public. However, true commercialization is still a long way off. This article analyzes the technologies, product features, potential markets, and government policies related to eVTOL, and constructs a four-stage, four-layer Policy-Technology Roadmap (P-TRM) model to guide the R&D process of eVTOL. Then transform it into a system structural model, and the Decision-making Trial and Evaluation Laboratory (DEMATEL) method is used to identify several key nodes in the R&D process. Utilizing the Technology Adoption Life Cycle (TALC) theory for interpretation and analysis, the article concludes by proposing strategies in product, technology, and policy support for how eVTOL can successfully cross the chasm. This preliminary analysis of the development path, key nodes, and necessary measures for crossing the chasm provides insights for the R&D and commercialization of eVTOL.
Keywords:
Electric Vertical Take-off and Landing
; Technology Roadmapping
; Technology Adoption Life Cycle
; DEMATEL
1. Introduction
The rise of electric vertical take-off and landing (eVTOL) technology has generated significant excitement, envisioning a future of “flying cars” that could transform transportation. With numerous companies entering the field and governments backing low-altitude economies, the commercial potential of eVTOL is becoming increasingly apparent. However, despite this enthusiasm, challenges persist on the road to full commercialization.
To address the complexities of eVTOL development, this article proposes an innovative approach to managing innovation in this emerging sector. By analyzing the interplay of technologies, product features, markets, and government policies, a comprehensive Policy-Technology Roadmap (P-TRM) model is constructed, offering strategic guidance for R&D efforts.
Moreover, practical methodologies, including the Decision-making Trial and Evaluation Laboratory (DEMATEL) method, are utilized to identify key areas of focus within the R&D process. Drawing on the Technology Adoption Life Cycle (TALC), actionable strategies are developed to support product, technology, and policy initiatives.
This article serves as a practical guide for stakeholders involved in eVTOL R&D and commercialization. By providing insights into development trajectories, identifying critical areas, and proposing essential measures for navigating the path to commercialization, it aims to empower individuals and organizations in the complex landscape of eVTOL innovation.
2. Status of Electric Vertical Take-Off and LANDING
2.1. Introduction to the eVTOL
The low-altitude economy integrates manned and unmanned aerial activities, boosting domestic demand and fostering new development models. This drives high-quality economic, social, and national defense growth. Urban air mobility (UAM) emerges as a clean and sustainable solution for growing urban transportation needs, enabling safe and efficient passenger and cargo operations[1].
The electric vertical take-off and landing (eVTOL) are crucial for developing both the low-altitude economy and UAM, can be described as a vehicle that fits somewhere in between a drone and a conventional airplane. The eVTOL features vertical takeoff and landing capability, electrification of lift and thrust, and automation of controls. Envisioned applications for passenger transportation include usage as air taxis, for emergency response (first-aid, police), and for leisure activities(sightseeing). As for the transportation of goods, eVTOL would offer larger capacity for freight transport than ordinary drones. More newcomers has entered the field of eVTOL aircraft development, including Volocopter (Germany), EHang (China), Airbus (US), Kitty Hawk (US), Lilium (Germany), Opener(US), and Cartivator (Japan)[2,3].
2.2. Classification of eVTOL
The European Union Aviation Safety Agency (EASA), via its Special Condition for small-category VTOL aircraft, published in 2018[4], has outlined two distinct characteristics common to eVTOL aircraft. These are vertical take-off and landing (VTOL) capability and a distributed electric propulsion system.
It’s worth noting that, due to the distributed electric propulsion (DEP) systems design adopted by eVTOL, it exhibits power relative scale independence, resulting in a diversity of eVTOL configurations. Their classification relationships, propulsion systems, and comparison are shown in Figure 1[5,6,7].
3. Technology Roadmapping
3.1. Introduction to Technology Roadmapping
Technology roadmapping is a versatile tool widely used in industry for strategic planning. It visually maps the connections between evolving markets, products, and technologies over time[8]. It offers a structured approach to explore and communicate linkages between technology resources, organizational goals, and changing environments[9].Researchers define technology roadmaps as consensus visions of future technology landscapes, guiding the identification, evaluation, and selection of strategic alternatives to achieve specific objectives[9,10]. They address key questions like: “Where are we going?” “Where are we now?” and “How can we get there?”[11].
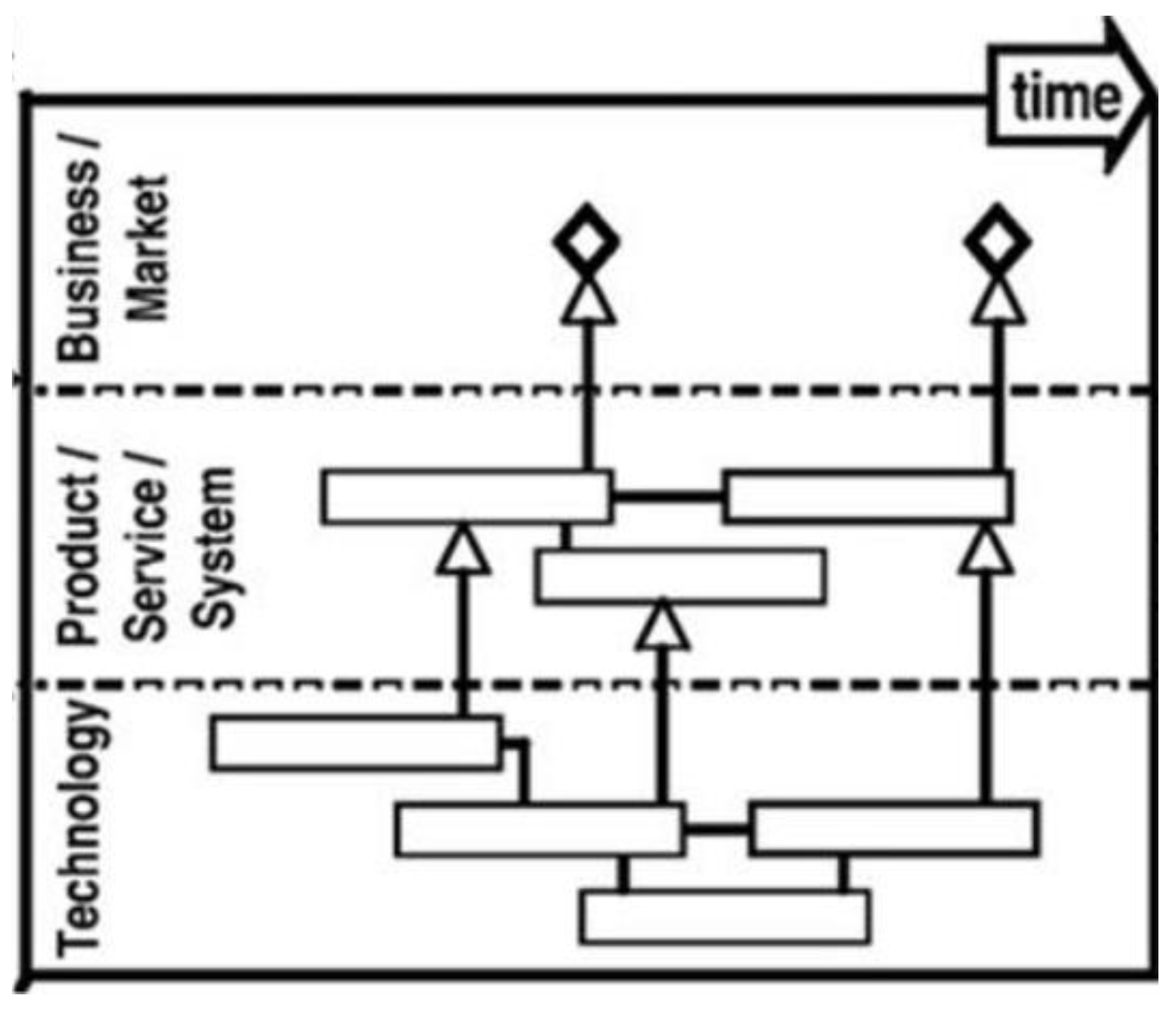
Technology roadmaps can be tailored to different levels, from component-level to entire sectors or fields of science[12]. They typically consist of three layers—technology, product, and market—along with a time frame.
Figure 2.
One typically technology roadmap with three layers.
3.2. Policy-Technology Roadmap
Many technological roadmap studies analyze market, product, and technology dimensions, yet few integrate policy into the framework. In regions where policy holds significant sway, understanding how policy interventions impact technology evolution via market and product strategies is crucial. Hence, the emergence of a Policy-Technology Roadmap (P-TRM), which incorporates policy tools, constructing a new framework to analyze policy effects on different stages of industrial development[13].
Policy tools can be categorized into three types: supply-side, environmental, and demand-side. Each type influences the market, product, and technology differently throughout technological and industrial evolution.

Table 1.
Types of policy tools.
| Type of policy tools | example | effect |
| Demand-side policy | Public procurement, price subsidies. | Stabilize the market environment for innovation, fostering confidence and stimulating technology research and development. |
| Environmental policy | Standard design, goal planning. | Shape product development by setting performance norms, encouraging innovation, and facilitating industry transitions |
| Supply-side policy | technology infrastructure, technology input | Support enterprise research and development, encouraging investment and effective resource allocation |
In early industrial stages, supply-side policies promote scientific research completion and technology application. Demand-side policies focus on transforming technology into marketable products. Environmental policies play a consistent role throughout the innovation cycle, impacting each stage of development.[13].
In this paper, we will utilize Policy-Technology Roadmap model to construct the technology roadmap for eVTOL.
4. Main layers of the Technology Roadmap
This paper aims to create a tailored four-layer technology roadmap for eVTOL, comprising Technology, Product, Market, and Policy. Predictions on the future development trends of each layer will be made based on existing eVTOL information. The stages encompass research and validation, early commercialization, rapid commercialization, and mature commercialization. Each stage is divided into time periods of 5 years each. This delineation of years is tentative, based on the assumption that eVTOL can progress and commercialize at a reasonably ideal pace. The reality may be entirely different, and eVTOL could even prove to be a non-commercializable design by the originally set second stage in the future.
4.1. Technology
1). Status of key eVTOL technologies
Distributed electric propulsion technology
Electric propulsion systems, like Distributed Electric Propulsion (DEP), are widely adopted in the emerging field of eVTOL aircraft. These systems utilize electric motors to drive ducted fans, converting electrical energy directly into mechanical power. Compared to conventional turbofan engines, they offer significant advantages, with electric systems utilizing over 70 percent of electricity compared to a turbofan engine’s 40 percent fuel energy utilization. This efficient energy conversion not only enhances overall system efficiency but also improves aircraft performance and significantly reduces fuel consumption.
The fundamental architecture of an electric propulsion system comprises three primary components: the propulsion system, power supply, and auxiliary systems. This architecture allows for greater design flexibility compared to conventional powerplants, facilitating a diverse range of eVTOL configurations and performance capabilities[6].
Lithium-ion batteries are currently the predominant energy storage solution for electric aircraft. However, to meet the stringent performance and safety requirements of this emerging sector, advancements in battery technology are imperative.
Electric motor and electronic control system technology play a pivotal role in ensuring the efficient, stable, and secure operation of eVTOL aircraft. High-power density and efficiency are critical factors in supporting vertical takeoff, landing, and high-speed flight. To achieve these objectives, it is essential to utilize advanced materials, structural design, manufacturing processes, and sophisticated energy management and flight control algorithms[6].
Low aerodynamic noise technology
Noise reduction is a crucial factor determining the feasibility of eVTOL aircraft for urban air travel. Various noise sources, such as paddle-vortex interference and blade-fuselage interference, significantly impact its suitability for urban environments. Currently, noise reduction measures for rotor noise are limited, with reducing rotor tip speed being a primary solution. However, decreasing tip speed often requires increasing rotor stiffness to maintain tension capacity, which may introduce performance challenges. Therefore, balancing noise reduction with overall performance enhancement has become a key focus of current technology research and development in the eVTOL sector[2].
Flight control technology
The commercial prospects of eVTOL depend, to a large extent, on innovations and advances in unmanned technology. At present, the research on eVTOL control technology mainly focuses on several key areas such as redundant rudder control and cooperative control, multi-flight mode robust control and fault reconstruction control. However, the difficulties in the process of commercialization cannot be ignored. Since the main flight area of eVTOL is concentrated over cities, this environment faces more constraints than conventional aircraft. Therefore, the level requirements for autonomous driving systems are also more stringent[3]. In the face of the needs of low-altitude cities, the electric vertical takeoff and landing flight control technology will develop towards autonomy and intelligence in the future.
2). Future prospects of eVTOL key technology development
The future prospects of eVTOL key technology development still involve three key technologies: distributed electric propulsion technology, low aerodynamic noise technology, and flight control technology, as outlined in Table 2.
4.2. Product
Based on the division into four stages: the research and validation stage, early commercialization stage, rapid commercialization stage, and mature commercialization stage, this section will make predictions regarding the main performance of eVTOL at each stage. Since it’s not possible to accurately predict the specific parameters and performance of future eVTOL products, this section will combine existing eVTOL-related technologies and apply research reports from leading companies in the industry to roughly describe the functions that eVTOL can achieve at each stage from a perspective focused on product functionality implementation[15].
Table 3.
Predicted Development of eVTOL Products.
| Research and Validation Stage | Early commercialization Stage | Rapid Commercialization Stage | Mature Commercialization Stage | |
| Driving mode | Autonomous driving technology awaits validation. | Requiring visual flight conducted by professional pilots in collaboration with assisted driving systems. | The system is responsible for most flight missions, equipped with professional pilots for manual control in emergency situations. | Passenger eVTOL achieve full autonomous flight, overseen remotely by a central control system, removing the requirement for onsite professional pilots. |
| Performance | Prototypes need to be explored through continuous experimentation and trial applications | The ideal performance parameters include a range of 150-200 kilometers, a cruising speed of 200-250 kilometers per hour, and a capacity of 4-5 passengers. | The emergence of second and third-generation commercial eVTOL products, and the larger size of eVTOL | A trend towards personalized design, with a variety of eVTOL designed and produced for different speeds, ranges, and appearances |
| Air traffic control | \ | Airspace and air traffic control systems have been adapted for low-altitude eVTOL flights, establishing fixed routes. Pre-approval from relevant authorities is required for flight missions. | Airspace management and air traffic control policies are becoming more flexible, with increased automation and shorter flight notification times. | The air traffic management system will be highly efficient, allowing airspace resources to be allocated on demand. |
| Infrastructure | \ | Landing and takeoff points are set up near traditional urban transport hubs. | Start spreading to urban commercial and residential centers and expanding into suburban areas. | eVTOL landing and takeoff points are integrated into urban planning. |
4.3. Market
In this section, the article will focus on describing the application scenarios of eVTOL, the operators of eVTOL operations, and the target users across different stages. This will help depict the market situation for eVTOL applications at various stages from three dimensions: target users,application scenarios, and eVTOL operators.
Due to the research and validation stage, eVTOL have not yet entered commercialization. The products are still in the prototype phase, and application standards and regulations are yet to be established. This section will not delve into the market situation during this stage.
1). Target users
In analyzing target users at different stages, we can utilize the Diffusion of Innovations theory, including frameworks like the Technology Adoption Life Cycle (TALC). This theory explains how new ideas and technology spread and at what rate. The TALC model categorizes consumers based on their risk sensitivity into innovators, early adopters, early majority, late majority, and laggards. Each group has distinct needs, product criteria, and reactions to innovations, requiring tailored marketing strategies[16]. As shown in Figure 3, with successive adoption by consumer groups (blue), the technology’s market share (yellow S-curve) will eventually saturate.
It is important to note that in the analysis below, the target users in the latter stage often encompass the user groups from the previous stage, and the users at each stage are not simply
Table 4.
Users in each stage.
| Stage | Consumer Groups | New Users | Characteristics |
| Research and Validation | Innovators | Technology pioneers, research institutions, aviation enthusiasts | -Interested in emerging technologies and new aircraft -Capable of investing significant resources into research and experimentation -Participate in research and testing processes |
| Early Commercialization | Early Adopters | Middle-income travelers, large corporations, affluent private users, individuals in need of air medical and tourism services | -Willing to try new products but more cautious compared to Innovators -Often have substantial incomes |
| Rapid Commercialization | Early Majority | Ordinary consumers, urban residents, business travelers | -Majority of consumers -Wait for evidence of reliability and effectiveness -Willing to pay reasonable prices -Concerned about convenience and practicality |
| Mature Commercialization | Late Majority and Laggards | Suburban users, conservative individuals | -Cautious about new technologies |
It is worth noting that with the advancement of eVTOL underlying technology and the reduction of production costs, private eVTOL will no longer be exclusive to high-income groups. The middle class may become important users of private eVTOL, similar to the current automobile market. Meanwhile, high-income individuals will focus more on personalized aviation solutions and be willing to invest in high-end personal air transportation as one of their routine travel modes.
Additionally, in the Technology Adoption Life Cycle, there exists a Chasm, which lies between early and mainstream markets[17]. Crossing this chasm is equally important for eVTOL, and the issues that eVTOL may encounter regarding this chasm will be analyzed separately in Section 6.2.
2). Application scenarios
In the early commercialization stage, eVTOL serve primarily in short-distance passenger flights, business charters, medical transfers, and sightseeing tours, akin to helicopter services. Notably, eVTOL offer advantages like lower costs, improved safety, passenger comfort, and reduced noise levels compared to helicopters.In the rapid commercialization stage, technological advancements drive market expansion, enabling larger passenger capacities and introducing shared ownership models like “air taxis” and “air buses.”In the mature commercialization stage, the eVTOL market grows substantially, with small-scale eVTOL becoming common in private ownership. Personal eVTOL are widely adopted for individual commuting, akin to the automobile market today.
3). eVTOL operation
In the early commercialization stage, eVTOL are mainly owned by enterprises and operated by professional pilots organized by eVTOL operators through leasing and other arrangements. A few high-income users may own private eVTOL. In the rapid commercialization stage, eVTOL ownership sharing becomes more common, led by operators. “Air taxis” and “air buses” emerge, reducing ownership and usage costs. Moving into the mature commercialization stage, alongside operator sharing, private eVTOL become prominent. Operators achieve cost-efficient, automated operations by remotely monitoring their fleet, marking a shift towards personalized and efficient air transportation services for both commercial and private users.
4.4. Policy
The introduction to P-TRM and the three types of policy tools has been mentioned in Section 3.2. In this section, an analysis of the Policy component of the Policy-Technology Roadmap (P-TRM) will be conducted. Policy tools will be categorized into three types: supply-side policy tools, environmental policy tools, and demand-side policy tools[13]. Drawing from policies implemented by China targeting the new energy vehicle industry, a possible policy framework for eVTOL in the future will be constructed.
First, let’s review China’s policies regarding new energy vehicles (NEVs). Since 2001, the Chinese government has implemented various policies targeting the NEV industry. These policies have led to NEVs gaining a significant market share in China’s automotive market, making it an influential industry internationally. Figure 4 illustrates key policies for the NEV industry in China from 2001 to 2020[18].
The Chinese government initially focused on supply-side policies in the early stages of the new energy vehicle industry, particularly through industrial policy planning schemes. During the early and rapid commercialization stages, numerous demand-side policy tools were utilized, including purchase subsidies, tax exemptions, and the promotion of charging station construction. Infrastructure development and subsidy policies typically follow market stimulation measures. Environmental planning has been integral throughout the industry’s development. In summary, supply-side policies prioritize scientific research advancement, demand-side policies aim to meet market demand, and environmental policies influence each stage of development. This observation aligns with the discussion in Section 3.2.
Based on the study of China’s policies for the new energy vehicle industry, potential government policies tailored for eVTOL can be envisioned, considering its characteristics:
1. R&D Support: The government will allocate funds and establish research grants to facilitate advancements in eVTOL-related technologies, aiming to enhance safety and efficiency.
2. Financial Support and Incentives: Tax breaks, subsidies, and loan guarantees will be provided to alleviate enterprise expenses, encouraging investment in eVTOL research, development, and manufacturing.
3. Planning and Policy Guidance: Comprehensive industrial plans will be formulated to delineate goals for the eVTOL sector, fostering an environment conducive to investment and innovation.
4. Market Access and Regulation: Stringent regulations and industry standards will be developed to ensure the quality and safety of eVTOL products, promoting standardization and instilling consumer confidence.
5. Infrastructure Development: Significant investments will be made in eVTOL infrastructure, including charging stations and landing facilities, to bolster operational efficiency and facilitate the expansion of eVTOL transportation networks.
6. Market Incentives: Subsidies and incentives will be offered to consumers to encourage the adoption of eVTOL technology, thereby accelerating market penetration and uptake.
All the mentioned policy tools actually need to enter at different time points during the development of eVTOL technology and exit in an orderly manner at the appropriate time, which will be illustrated in Chapter 5.
5. The Construction of the Technology Roadmap
This paper constructs the P-TRM framework of electric VTOL aircraft in four dimensions of “policy-technology-product-market”, and describes the relationship between each dimension at different stages. Through the analysis of the graph, the paper elucidates the mechanism of the policy tools of the landmark policy text on the market, product and technology in the dimension of industrial development stage. Among them, the arrow represents the interaction between levels and the function dimension of policy tools, the solid line represents the direct relationship at this level, and the dashed line represents the cross-layer relationship.
5.1. Policy Role Dimensions at Different Commercialization Stages
This paper outlines the future development of eVTOL in four stages: research and verification, early commercialization, rapid commercialization, and mature commercialization. Three types of policy tools are identified to align with different developmental phases, gradually releasing policy effects to facilitate transformation.
Demand-side Policies: These policies streamline market access and foster consumer demand, crucial for eVTOL commercialization. Early-stage market innovation initiatives will reduce entry barriers and stimulate competition, while subsidies accelerate consumer adoption. Infrastructure development, prioritizing urban landing and charging facilities, enhances operational efficiency and scales the eVTOL network.
Environmental Policies: Across eVTOL development stages, these policies shape product design and innovation environments. Governments provide industrial planning and policy guidance, establish safety standards, and supervise markets to prevent unethical practices. Infrastructure promotion supports eVTOL operations.
Supply-side Policies: Primarily targeting research and development, these policies propel early-stage eVTOL innovation. Governments offer funding and equipment support, facilitating research projects and reducing production costs through financial incentives like tax subsidies and innovation grants.
5.2. Technology-Product Dimensions at Different Commercialization Stages
The development of eVTOL technology initially influences product dimensions before indirectly impacting the market, as discussed in Section 4.1 where key technological advancements for each commercialization stage were examined. Technological progress is a driving force behind industrial innovation, directly shaping product performance and user experience. Key technologies such as electric propulsion and flight control significantly influence product design, flight performance, and cost-effectiveness. For instance, enhancements in electric propulsion contribute to improved flight efficiency and range, while innovations in flight control technology enhance stability and safety, thus aligning eVTOL with market demands.
The eVTOL policy-technology roadmap should delineate the development path and application principles of flight control and electric propulsion technologies. Flight control technology undergoes iterative enhancements to meet evolving safety standards, directly guiding product development. Meanwhile, advancements in electric propulsion seamlessly integrate, enhancing performance and cost efficiency, thereby accelerating market adoption and supporting commercialization.
5.3. Products at Different Stages of Commercialization - Market Dimension
The impact of products on the market is direct and profound compared to the more indirect influence of technology. Product features, functions, and user experience directly shape market demand and direction. Market feedback guides product iteration.
During research and development, eVTOL targets innovators and investors to validate technology feasibility and basic functionality.In early commercialization, eVTOLs are used in specific activities like medical transport and sightseeing, with limited market size due to technical challenges and incomplete infrastructure. Private ownership indicates potential growth, prompting product innovation for enhanced competitiveness. As technology matures and infrastructure develops, the eVTOL market sees rapid expansion, with increased sales and leasing. Manufacturers invest in R&D to meet rising consumer expectations for performance and safety. In mature commercialization, eVTOL technology integrates into daily transportation, solidifying its role as a vital mode of travel in people’s lives.
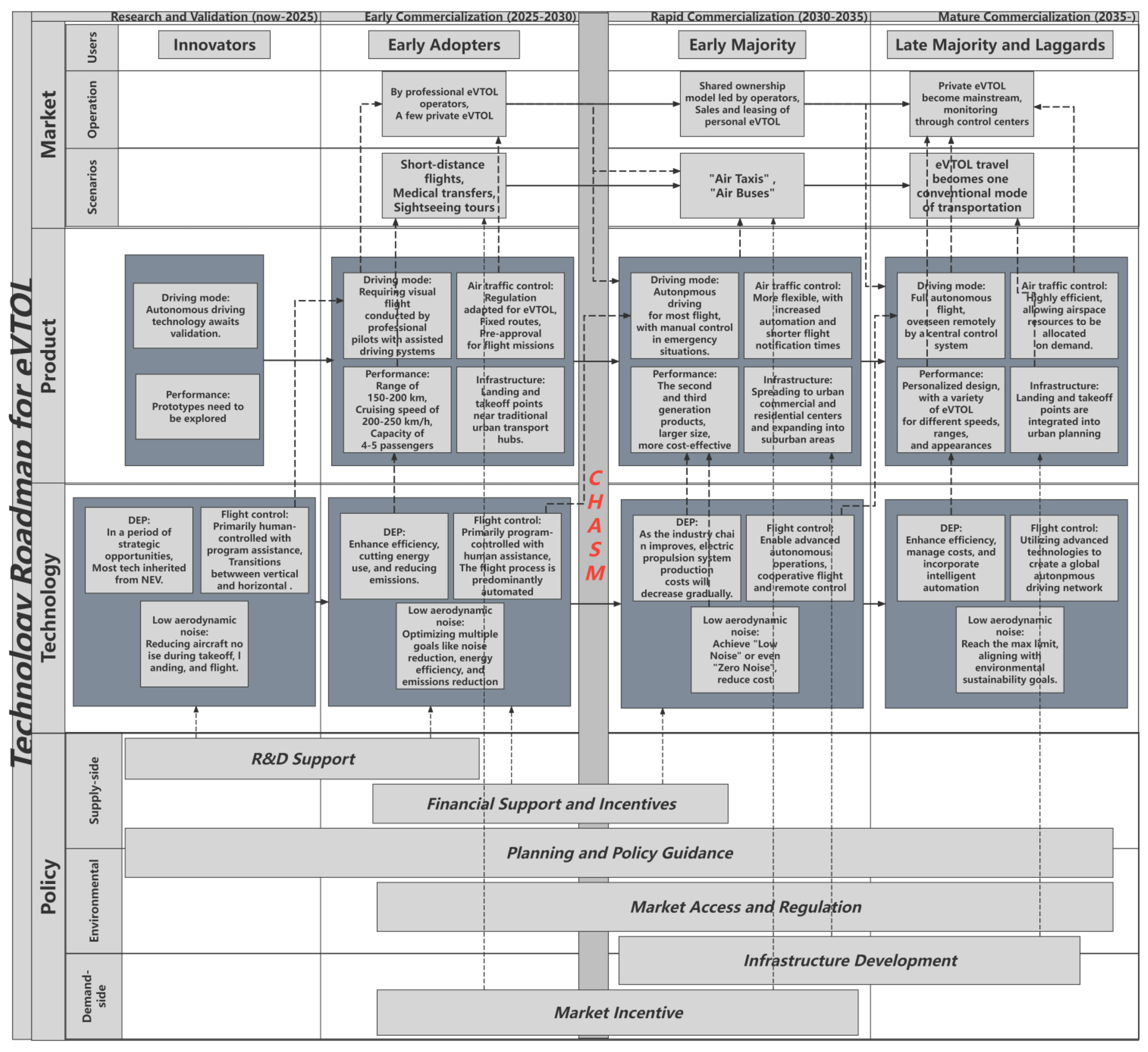
Integrating the above discussion, we constructed the policy-technology roadmap (P-TRM) for eVTOL, incorporating the TALC theory, shown as Figure 5.
6. Further Analysis of the TRM
The Chapter 5 of this paper constructs a technology roadmap for eVTOL. The technology roadmap itself serves as a qualitative tool for managing and planning the product/technology innovation research and development process. It needs to be applied to actual innovation management rather than being a simple outlook for a product/technology. In this chapter, the focus will be on the key nodes that eVTOL needs to pay attention to in the process of innovation research and development and commercialization.
As the technology roadmap itself is a qualitative tool, relying solely on “intuition” to identify key nodes in the qualitative relationship diagram is obviously not rigorous enough. Therefore, in the analysis based on the technology roadmap in this chapter, the Decision-making Trial and Evaluation Laboratory (DEMATEL) method and Technology Adoption Life Cycle (TALC) theory are used to explain the key nodes reflected in the technology roadmap in the eVTOL R&D process.
6.1. Analysis by DEMATEL
1). Brief introduction to DEMATEL
Decision-making Trial and Evaluation Laboratory (DEMATEL) is a systematic analysis method that utilizes graph theory and matrix tools to interpret problems. By examining the logical relationships and direct impact matrices among various elements within a system, Dematel can calculate the influence and influenced degrees of each element on others[19].
Step 1: Generate the group direct-influence matrix (also called “relationship matrix”) Z based on the relationships between the elements.
Step 2: Normalize the group direct-influence matrix to obtain the normalized direct-influence matrix X
Step 3: Calculate the total-influence matrix T
Step 4: According to the the total-influence matrix T, calculate the effect degree (r) and cause degree (c), representing the sum of the rows and the sum of the columns from the total-influence matrix T, then calculate Prominence (r+c) and Relation (r-c). For r and c:
Step 5: Normalize the Prominence and calculate the weight of each element.
Step 6: Represent the relationship between Prominence and Relation through graphs, namely the Influential Relation Map (IRM).
Step 7: Analyze specific problems accordingly.
2). DEMATEL for roadmap of eVTOL
For each node in the technology roadmap, labeling is applied. The nodes of the Product layer and Technology layer at each stage are considered as a whole. The nodes within each layer are numbered from left to right, except for the nodes in the Policy layer, which are numbered from top to bottom. For example, the first node of the Market-Operation layer is labeled as M11, the third node of the Market-Scenarios layer is labeled as M23, the second node of the Product layer is labeled as P2, and the fourth node of the Technology layer is labeled as T4. Regarding the Policy layer, due to the numerous connections from the nodes of Planning and Policy Guidance and Market Access and Regulation, in order to appropriately reduce the complexity of the model, these nodes are excluded from the DEMATEL processing in this instance. Thus, Financial Support and Incentives are labeled as G2, and Infrastructure Development is labeled as G3. The labeling relationship is as shown in Figure 6.
For the weights between nodes, due to the absence of specific quantitative relationships in the existing eVTOL technology roadmap, and the objective difficulty in confirming such quantitative relationships at present, all weights between nodes in this section are equally set to 1. This simplifies the model, reduces the complexity of data collection and analysis, while still providing a relational analysis framework, serving as a reasonable compromise solution.
The group direct-influence matrix (relationship matrix) Z (18x18):
| M11 | M12 | M13 | M21 | M22 | M23 | P1 | P2 | P3 | P4 | T1 | T2 | T3 | T4 | G1 | G2 | G3 | G4 | |
| M11 | 1 | 1 | 1 | |||||||||||||||
| M12 | 1 | 1 | ||||||||||||||||
| M13 | ||||||||||||||||||
| M21 | 1 | |||||||||||||||||
| M22 | 1 | |||||||||||||||||
| M23 | ||||||||||||||||||
| P1 | 1 | |||||||||||||||||
| P2 | 1 | 1 | 1 | |||||||||||||||
| P3 | 1 | 1 | 1 | |||||||||||||||
| P4 | 1 | 1 | ||||||||||||||||
| T1 | 1 | 1 | ||||||||||||||||
| T2 | 1 | 1 | 1 | |||||||||||||||
| T3 | 1 | 1 | 1 | |||||||||||||||
| T4 | 1 | |||||||||||||||||
| G1 | 1 | 1 | ||||||||||||||||
| G2 | 1 | 1 | ||||||||||||||||
| G3 | 1 | 1 | ||||||||||||||||
| G4 | 1 | 1 |
In each row, the weight number represents the strength of influence of the element in that row on the element in the column where the number is located. A weight of 0 (not displayed in the matrix) indicates that the element in the row has no influence on the element in the corresponding column.
By normalizing the group direct-influence matrix, we obtain the normalized direct-influence matrix X, and after performing calculations, ultimately derive the total-influence matrix T:
| M11 | M12 | M13 | M21 | M22 | M23 | P1 | P2 | P3 | P4 | T1 | T2 | T3 | T4 | G1 | G2 | G3 | G4 | |
| M11 | 0.444 | 0.235 | 0.444 | 0.235 | 0.333 | 0.259 | ||||||||||||
| M12 | 0.444 | 0.111 | 0.333 | |||||||||||||||
| M13 | ||||||||||||||||||
| M21 | 0.333 | 0.111 | ||||||||||||||||
| M22 | 0.333 | |||||||||||||||||
| M23 | ||||||||||||||||||
| P1 | 0.111 | 0.086 | 0.055 | 0.111 | 0.123 | 0.067 | 0.333 | 0.148 | 0.078 | |||||||||
| P2 | 0.333 | 0.259 | 0.165 | 0.333 | 0.370 | 0.202 | 0.444 | 0.235 | ||||||||||
| P3 | 0.333 | 0.259 | 0.333 | 0.259 | 0.444 | |||||||||||||
| P4 | 0.333 | 0.333 | ||||||||||||||||
| T1 | 0.148 | 0.165 | 0.128 | 0.148 | 0.214 | 0.144 | 0.444 | 0.346 | 0.219 | 0.333 | 0.111 | 0.037 | ||||||
| T2 | 0.111 | 0.235 | 0.219 | 0.111 | 0.272 | 0.232 | 0.333 | 0.593 | 0.424 | 0.333 | 0.111 | |||||||
| T3 | 0.111 | 0.235 | 0.111 | 0.235 | 0.333 | 0.593 | 0.333 | |||||||||||
| T4 | 0.111 | 0.111 | 0.333 | |||||||||||||||
| G1 | 0.086 | 0.133 | 0.116 | 0.086 | 0.162 | 0.125 | 0.259 | 0.313 | 0.214 | 0.333 | 0.444 | 0.148 | 0.049 | |||||
| G2 | 0.037 | 0.115 | 0.151 | 0.037 | 0.128 | 0.155 | 0.111 | 0.309 | 0.339 | 0.333 | 0.444 | 0.148 | ||||||
| G3 | 0.111 | 0.198 | 0.111 | 0.198 | 0.333 | 0.481 | ||||||||||||
| G4 | 0.333 | 0.444 | 0.148 |
Calculate the effect degree (r), cause degree (c), prominence (r+c), relation (r-c) and weight from the total-influence matrix T.
Table 5.
DEMATEL calculates indicators.
| Effect degree (r) | Cause degree (c) | Prominence (r+c) | Relation (r-c) | Weight | |
|---|---|---|---|---|---|
| M11 | 1.951 | 0.827 | 2.778 | 1.123 | 0.057 |
| M12 | 0.889 | 1.993 | 2.882 | -1.104 | 0.059 |
| M13 | 0.000 | 2.649 | 2.649 | -2.649 | 0.054 |
| M21 | 0.444 | 1.160 | 1.605 | -0.716 | 0.033 |
| M22 | 0.333 | 3.047 | 3.380 | -2.713 | 0.069 |
| M23 | 0.000 | 3.000 | 3.000 | -3.000 | 0.061 |
| P1 | 1.114 | 0.000 | 1.114 | 1.114 | 0.023 |
| P2 | 2.342 | 1.481 | 3.823 | 0.860 | 0.078 |
| P3 | 1.630 | 3.152 | 4.782 | -1.523 | 0.098 |
| P4 | 0.667 | 3.954 | 4.620 | -3.287 | 0.095 |
| T1 | 2.439 | 0.333 | 2.772 | 2.105 | 0.057 |
| T2 | 2.974 | 1.111 | 4.085 | 1.863 | 0.084 |
| T3 | 1.951 | 1.037 | 2.988 | 0.914 | 0.061 |
| T4 | 0.556 | 0.679 | 1.235 | -0.123 | 0.025 |
| G1 | 2.471 | 0.000 | 2.471 | 2.471 | 0.051 |
| G2 | 2.308 | 0.000 | 2.308 | 2.308 | 0.047 |
| G3 | 1.432 | 0.000 | 1.432 | 1.432 | 0.029 |
| G4 | 0.926 | 0.000 | 0.926 | 0.926 | 0.019 |
The Bar chart reflecting the weights of each element:
It is easy to see that the weights of P3, P4, T2, and P2 are greater than 7%, indicating that these nodes representing products or technologies deserve attention.
The Influential relation map (IRM):
From this figure, decision makers can visually discern complex causal relationships among factors, spotlighting valuable insights for decision-making.
Quadrant I factors, identified as core factors or intertwined givers, hold high prominence and relation. These critical nodes include technology and product nodes in the second stage, T2, P2, T3, T1, and M11.Quadrant II factors, termed driving factors or autonomous givers, exhibit low prominence but high relation, such as P3 and P4.Quadrant III factors, known as independent factors or autonomous receivers, have low prominence and relation, like T4, and are relatively disconnected from the system.Quadrant IV factors, termed impact factors or intertwined receivers, possess high prominence but low relation, such as policy nodes. Factors influencing government policies may extend beyond the technology roadmap’s scope, requiring assistance from other analytical models. This observation aligns with the theoretical analysis of the DEMATEL method.
It is worth noting that market nodes often reside in the lower half of the graph, with low relation (R-C). This is because, during the process of constructing system relationships (i.e., when building the technology roadmap), market category nodes are more widely dispersed. Additionally, market nodes often appear at the end of a stage’s sub-graph, indicating the culmination of commercialization in that stage, although some market nodes are indirectly linked to certain product nodes through feedback.
Combining the above analysis, we can easily identify several prominent nodes in the technology roadmap using the DEMATEL method. These nodes have high weights in Figure 7 and are located in or near the quadrant I in Figure 8, such as P2, T2, P3, and T3.
Notably, both the weight map and influential relation map highlight prominent nodes in the early and rapid commercialization stages of the technology roadmap. These nodes align with the Early Adopters and Early Majority stages in the market layer, with connections spanning across these stages. This observation resonates with the chasm concept in the Technology Adoption Life Cycle theory, situated between early adopters and the mainstream market.
Is this just a coincidence?
6.2. Crossing the Chasm
In Section 4.3.1, we briefly discussed the Technology Adoption Life Cycle (TALC) theory and utilized it to analyze the classification of adoption groups, providing insights into the potential new target users for eVTOL at different stages. We also mentioned the gap or chasm between the early adopters of the product (the technology enthusiasts and visionaries) and the early majority (the pragmatists). Furthermore, in Section 6.1, we used DEMATEL to discover that nodes within the eVTOL technology roadmap, which logically need to cross the chasm, hold greater prominence and relation within the system, thus warranting special attention.
Crossing the chasm is vital for high-tech companies as it marks the transition from selling to early adopters to selling to mainstream customers. Early adopters are usually tech enthusiasts, while mainstream customers are more conservative and require more proof of a product’s value. Successfully crossing the chasm can unlock a broader market and sustained growth, while failure to do so can lead to stagnation, loss of market share, or even failure[17].
For specific products like eVTOL, initial interest may come from tech and aviation enthusiasts. However, broad market acceptance and adoption are necessary for eVTOL to become a mainstream mode of transportation. This requires demonstrating technical feasibility, safety, and value proposition, including comfort, convenience, reliability, and affordability. Addressing concerns like safety, regulations, and operating costs is crucial to win over mainstream customers.
So, why not incorporate the chasm into the technology roadmap? This way, the final eVTOL technology roadmap would be complete:
Figure 9.
The final P-TRM for eVTOL, with chasm.
The key breakthroughs in crossing the chasm successfully should mainly focus on achieving breakthroughs in three areas: the technical feasibility, safety, and affordability.
In terms of technical feasibility, eVTOL needs to develop advanced electric flight technology, including high-energy-density batteries, efficient electric motors, and intelligent power management systems, to meet the requirements for sufficient flight range and passenger capacity. Additionally, infrastructure construction and management need further research and deployment to ensure eVTOL can flexibly take off and land in urban environments, with flexible scheduling.This part has been extensively discussed in Section 4.1.
Safety is one of the key barriers for eVTOL to enter the mainstream market. It requires advanced automatic flight systems, including functions such as automatic takeoff and landing, obstacle detection and avoidance, and flight path planning, to ensure flight safety and stability. Moreover, emergency handling capabilities are also crucial, such as automatic switching to backup power, automatic return systems, and emergency landing procedures, to cope with possible failures or accidents.
Regarding affordability, eVTOL needs to reduce manufacturing and operating costs to enhance product competitiveness and market attractiveness. This involves improvements in materials and production processes, as well as the optimization of scale production and supply chain management. The realization and application of fully automatic flight are imperative; otherwise, it would be challenging for companies and individuals to afford the high costs of training and employing professional pilots. Furthermore, price competitiveness is also critical, and eVTOL needs to ensure that product prices are competitive to attract mainstream customers’ purchases.
In the future, as eVTOL enters the mainstream market, the above three aspects based on technology and product must be realized, and they need to meet market expectations. The achievement of these goals must start from the early commercialization stage, or even from the present.
Government policies play a crucial role in shaping the commercialization path of eVTOL. As shown in Figure 4, “Representative Policies for China’s NEV Industry,” substantial policy investment often aligns with the transition from early to rapid commercialization, as identified by the TALC theory. Therefore, strategic policy support is essential for facilitating this transition. In China, while numerous policies aimed at fostering the low-altitude economy have been introduced, most policy issuers are local governments, and progress remains largely at the conceptual and planning stages. Overcoming significant obstacles and streamlining policy guidance and support for eVTOL remain pressing challenges.
In conclusion, the successful commercialization of eVTOL hinges not only on technological breakthroughs and product innovations but also on the effective implementation of marketing strategies and supportive governmental policies. By addressing these multifaceted aspects in a holistic manner, eVTOL companies can navigate the challenges of crossing the chasm and unlock the full potential of this transformative technology in reshaping the future of urban transportation.
7. Conclusions
This article provides a brief introduction to the characteristics and applications of eVTOL products. By analyzing the required technology, current status of products, expected market, and possible industrial policies for eVTOL, a four-stage development path consisting of technology, product, market, and policy layers is formed. Subsequently, a Policy-Technology Roadmap (P-TRM) model is constructed based on this framework to guide the R&D process of eVTOL.
By transforming the policy-technology roadmap of eVTOL into a system structural model, key nodes of this system structure, namely the technology and product nodes between the stages of early commercialization and rapid commercialization, are identified using the Decision-making Trial and Evaluation Laboratory (DEMATEL) method. Additionally, using Technology Adoption Life Cycle (TALC) theory for interpretation, it is proposed that significant breakthroughs in technical feasibility, safety, and affordability are necessary for eVTOL to cross the chasm successfully. Several essential measures for crossing the chasm are outlined, along with policy support.
Table 6.
Measures for crossing the chasm.
| Aspect | Strategies |
|---|---|
| Technical Feasibility | - Develop advanced electric flight technology, including high-energy-density batteries, efficient electric motors, and intelligent power management systems. - Research and deploy infrastructure for flexible takeoff and landing . - Ensure sufficient flight range and passenger capacity. |
| Safety | - Implement advanced automatic flight systems, including automatic takeoff and landing, obstacle detection and avoidance, and flight path planning. - Enhance emergency handling capabilities, such as automatic switching to backup power and emergency landing procedures. |
| Affordability | - Reduce manufacturing and operating costs through improvements in materials, production processes, scale production, and supply chain management. - Realize and apply fully automatic flight to minimize training and employment costs for professional pilots. - Ensure price competitiveness to attract mainstream customers’ purchases. |
| Governmental Policies | - Strategically direct policy support towards facilitating the crossing of the chasm. - Overcome obstacles and streamline policy guidance and support for eVTOL to foster low-altitude economy development. |
This article provides a preliminary analysis of the development path, key nodes, and necessary measures for crossing the chasm for eVTOL. It offers insights for the R&D and commercialization of eVTOL technology.
Acknowledgments
The authors would like to express their gratitude to the School of Management at Nanjing University of Posts and Telecommunications for their overall support in the writing of this article. Special thanks go to the funds as follows, Major Project of Philosophy and Social Science Research in Colleges and Universities of Jiangsu Province (2019SJZDA042); 2023 College Students Innovation and Entrepreneurship Training Program Provincial general project (202310293127Y); Key Project of Teaching Reform at Nanjing University of Posts and Telecommunications: Research on Project Driven Teaching Reform Empowered by Multiple Platforms(JG00123JX24).
References
- Goyal, R., Reiche, C., Fernando, C., Serrao, J., Kimmel, S., Cohen, A., and Shaheen, S., Urban Air Mobility (UAM) Market Study[R]. 20190001472, National Aeronautics and Space Administration, Washington, D.C., 2018.
- Hideki K. Development trends and prospects for eVTOL:a new mode of air mobility[R]. Mitsui & Co. Global Strategic Studies Institute Monthly Report,2018.
- Du Wei, Sun Na. Research on development status of eVTOL [J]. Aeronautical Science & Technology,2021,32 (11): 1-7. [CrossRef]
- EASA, Proposed Special Condition for small-category VTOL aircraft[R]. Vol. SC-VTOL-01, European Aviation Safety Agency, Brussels, 2018.
- UGWUEZE O, STATHEROS T, BROMFIELD MA, et al. Trends in eVTOL aircraft development: The concepts, enablers and challenges[C].Proceedings of the AIAA Scitech 2023 Forum. Reston: AIAA,2023. [CrossRef]
- DENG J H. Technical status and development of electric vertical take-off and landing aircraft[J]. Acta Aeronautica et Astronautica Sinica,2024,45(5):529937.
- Wang Xiangyu. The Future of Urban Air Mobility Market Development[J].Aerospace Power,2019(04):18-21. https://kns.cnki.net/kcms2/article/abstract?v=mjz80qGfPOXWapJAsY5ylA9PstP2yiehilg3vUsarXUPQqk6nCXrgYX6woouXZ8UDecB_8zcpEx82saY4iAj0Mf1AMWx8W0EAstyWE-xcRHDvn518zLES14e0wsKhNjoOm4Br8yb03U=&uniplatform=NZKPT&language=CHS.
- Marie L.Garcia,Olin H.Bray.Fundamentals of Technology Roadmapping[R].Albuquerque, New Mexico 87185 and Livermore, California, USA: Sandia National Laboratories,1997. [CrossRef]
- Phaal, R., Farrukh, C. J., & Probert, D. R. Technology roadmapping—A planning framework for evolution and revolution[J]. Technological Forecasting and Social Change, 2004, 71(1–2), 5-26. [CrossRef]
- Kostof, R. N., & Schaller, R. R. Science and technology roadmaps[J]. IEEE Transactions on Engineering Management, 2001, 48(2), 132-143. [CrossRef]
- Phaal, R., Farrukh, C. J., & Probert, D. R. Strategic roadmapping: A workshop-based approach for identifying and exploring strategic issues and opportunities[J]. Engineering Management Journal, 2007, 19(1), 3-12. [CrossRef]
- Phaal, R., & Muller, G. An architectural framework for roadmapping: Towards visual strategy[J]. Technological Forecasting and Social Change, 2009, 76(1), 39–49. [CrossRef]
- HUANG Cui,XU Lei,ZHONG Xiao-tian,SU Jun.A Framework of Integrated Policy-Technology Roadmap ( P-TRM) and Its Use:Examples of Wind Turbine and Solar PV Industries[J].China Soft Science: 2014(5), 76-84. https://kns.cnki.net/kcms2/article/abstract?v=mjz80qGfPOWjAjMWliskn2afH5rNiBstflMScY1YZ_XPPswEEyYubMBhzt_ooGa85RGVCVekkBfI1kTFzKUvCplap7LmyNuELH0FtYZ3JYIwpmOGaOSSzIMyEGM-czvs&uniplatform=NZKPT&language=CHS.
- Han Quanquan, Xi Qingbiao, Liu Huixia, et al. Based on unmanned aerial vehicle (uav) control technology development trend of flight safety study [J]. Journal of modern electronic technology, 2014 37(13) : 22-25. [CrossRef]
- China Southern Airlines General Aviation Co., Ltd., Shanghai Volant Aerospace Technology Co., Ltd..White Paper on Passenger eVTOL Applications and Markets[R].Shanghai, China:2023.
- Rogers, E. Diffusion of innovations[M].1962. Free Press, London, NY, USA.
- Moore G A. Crossing the Chasm, 3rd Edition[M]. 2014.HarperCollins Publishers,New York, USA.
- Hu Wen, Xia Beil. A Framework of Policy-technology Roadmap of Disruptive Technology: A Case of New Energy Vehicle Industry in China[J]. Science & Technology Progress and Policy, 2024 (41), 2: 25-34. https://kns.cnki.net/kcms2/article/abstract?v=mjz80qGfPOU_2e9EHapjNr97rVUgaLOpHL7A9do9OYQvru0JGlU2-F8lE_I2E9gRjGnk0779tfpF783asVNB8KXRBi61LVDcyL0qZN0ufDx5TNOKLlMY9Xs5FWH1RNbwdIStVR_DEko=&uniplatform=NZKPT&language=CHS.
- Si, Sheng-Li, et al. “DEMATEL technique: A systematic review of the state-of-the-art literature on methodologies and applications.” Mathematical Problems in Engineering 2018 (2018): 1-33. [CrossRef]
- Alinezhad, Alireza, et al. “DEMATEL method.” New Methods and Applications in Multiple Attribute Decision Making (MADM) (2019): 103-108. [CrossRef]
Figure 1.
Propulsion architectures of eVTOL aircraft[5].
Figure 1.
Propulsion architectures of eVTOL aircraft[5].
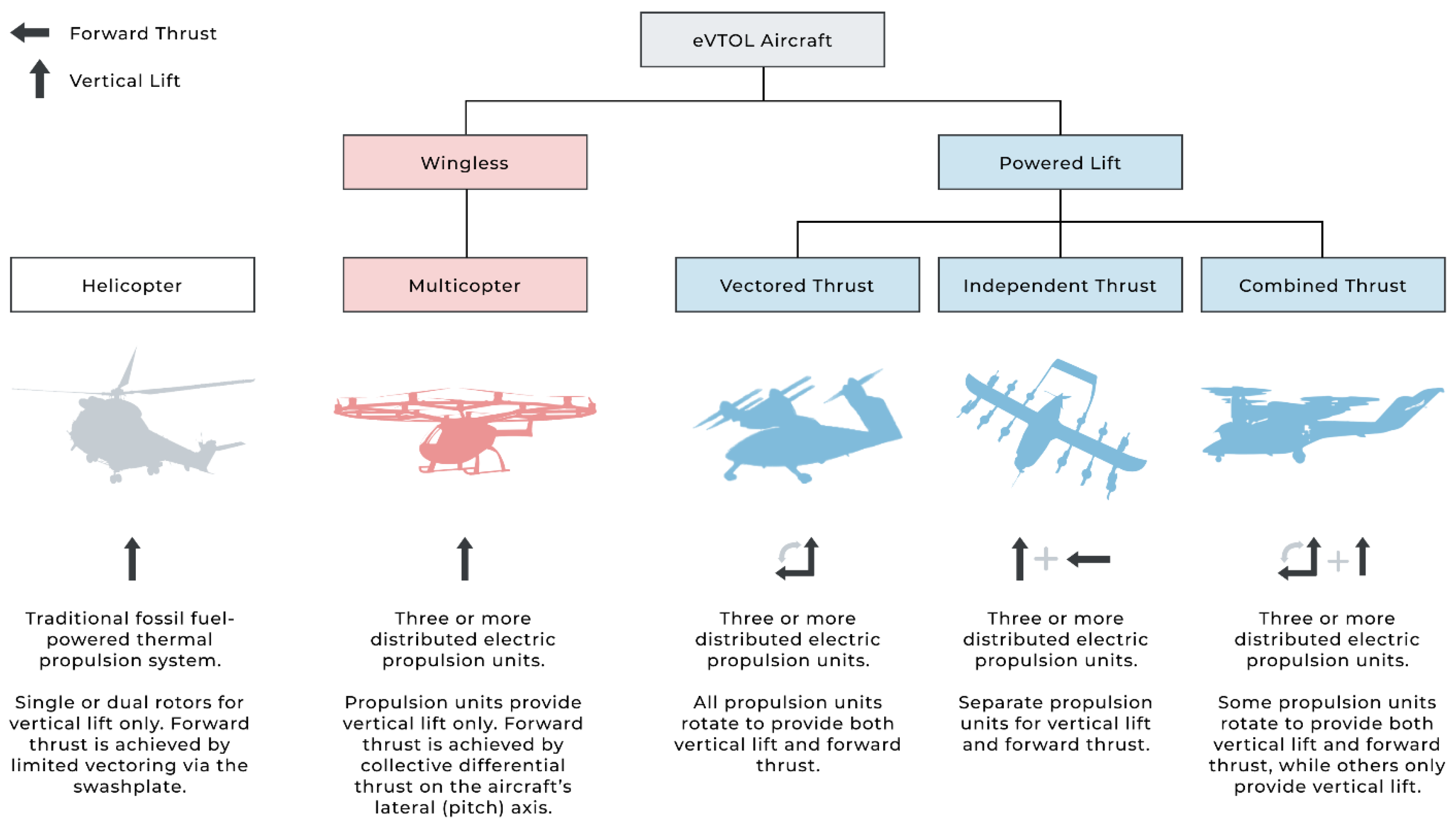
Figure 3.
The diffusion of innovations according to Rogers[16].
Figure 3.
The diffusion of innovations according to Rogers[16].
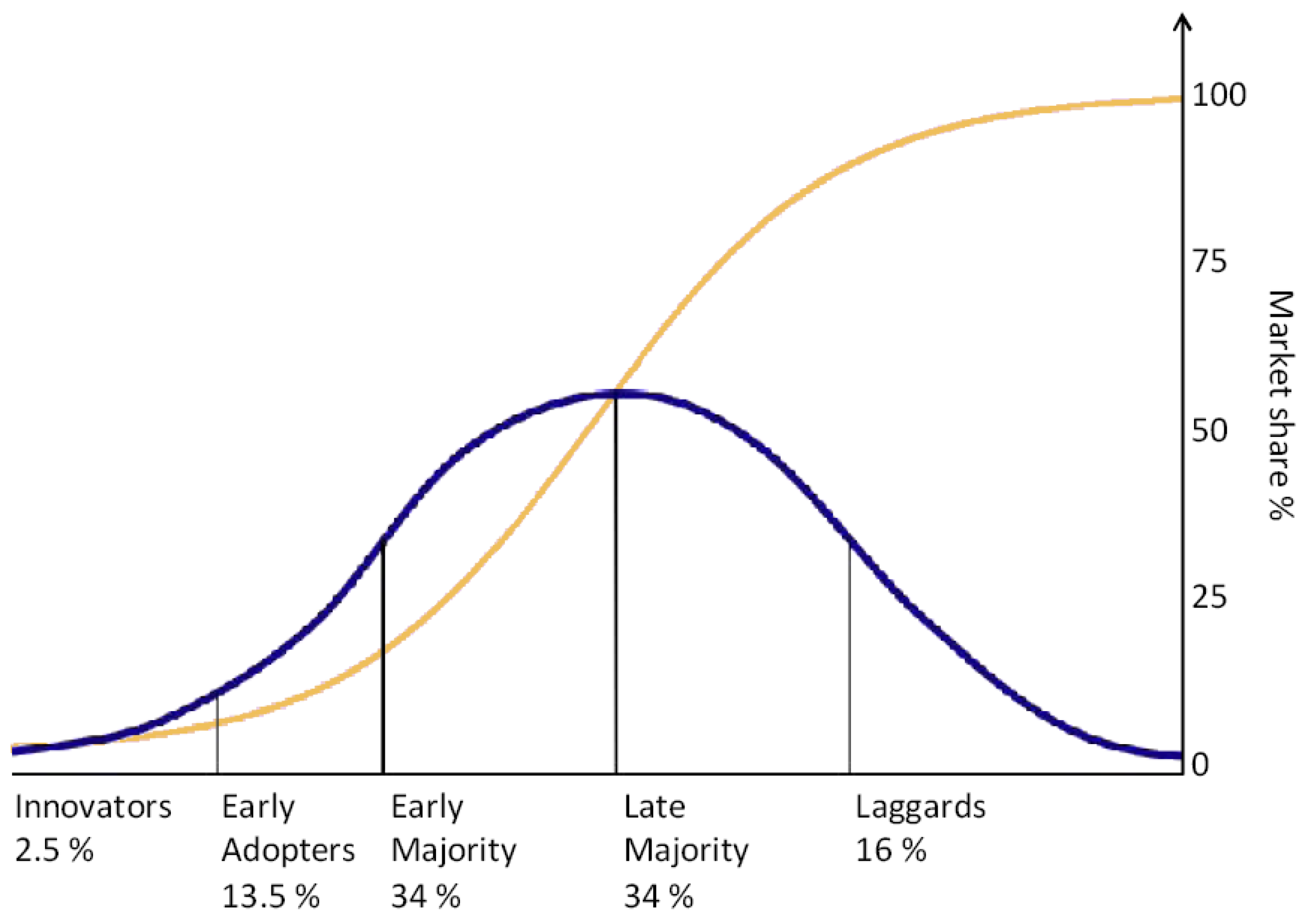
Figure 4.
Representative Policies for China’s NEV Industry, from 2001 to 2020.
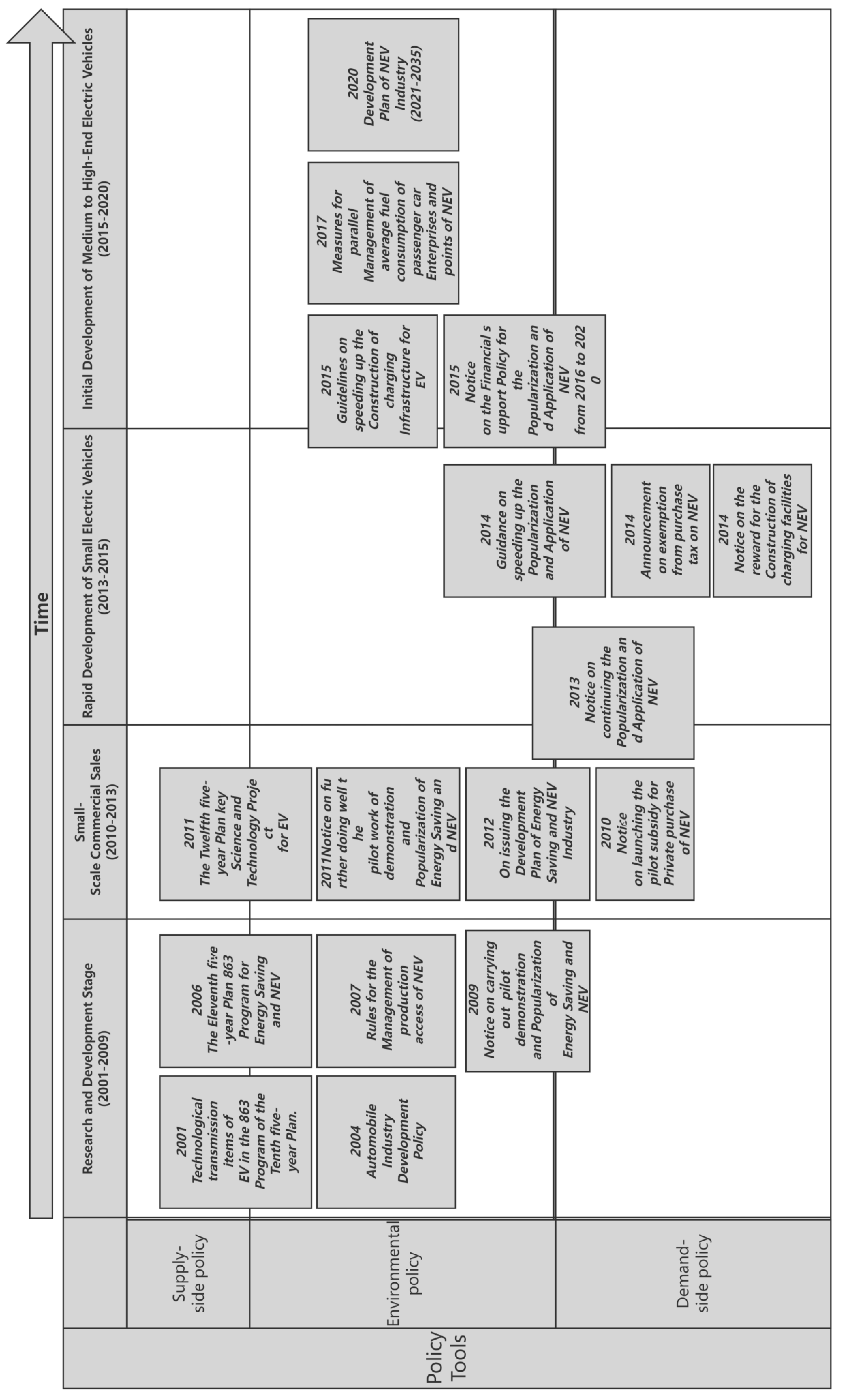
Figure 5.
P-TRM for eVTOL.
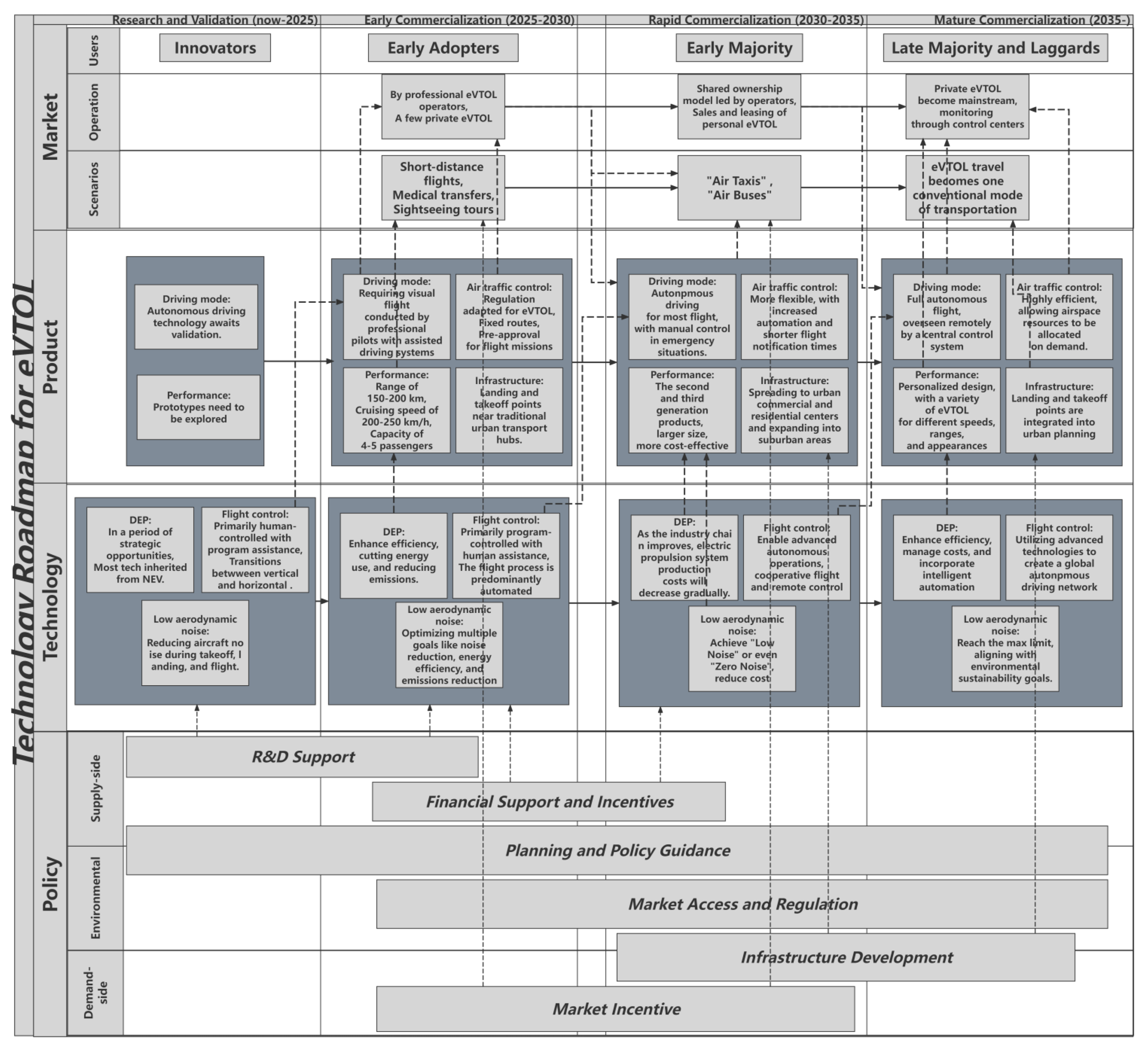
Figure 6.
Labels for the nodes.
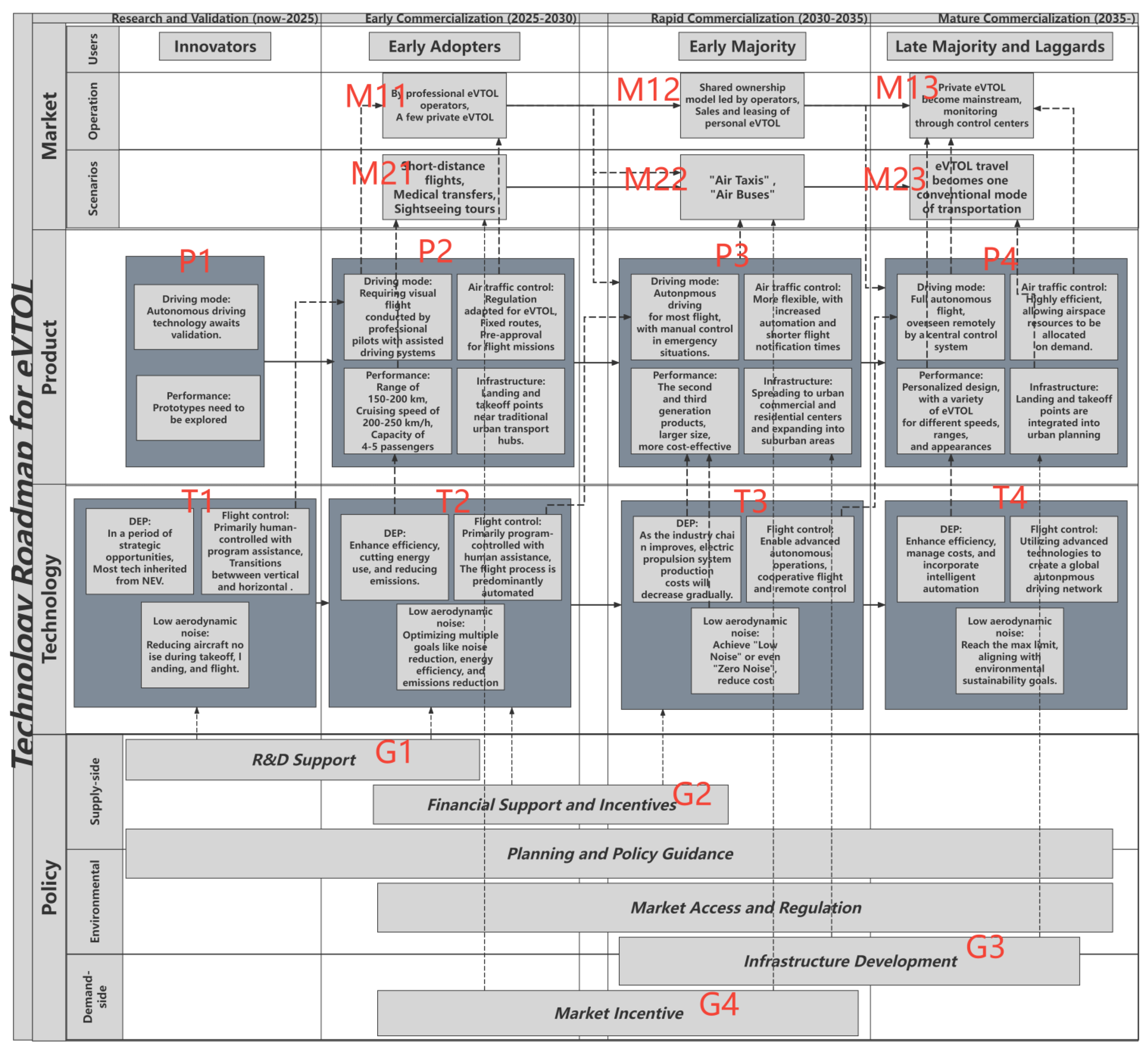
Figure 7.
Weights of each element.
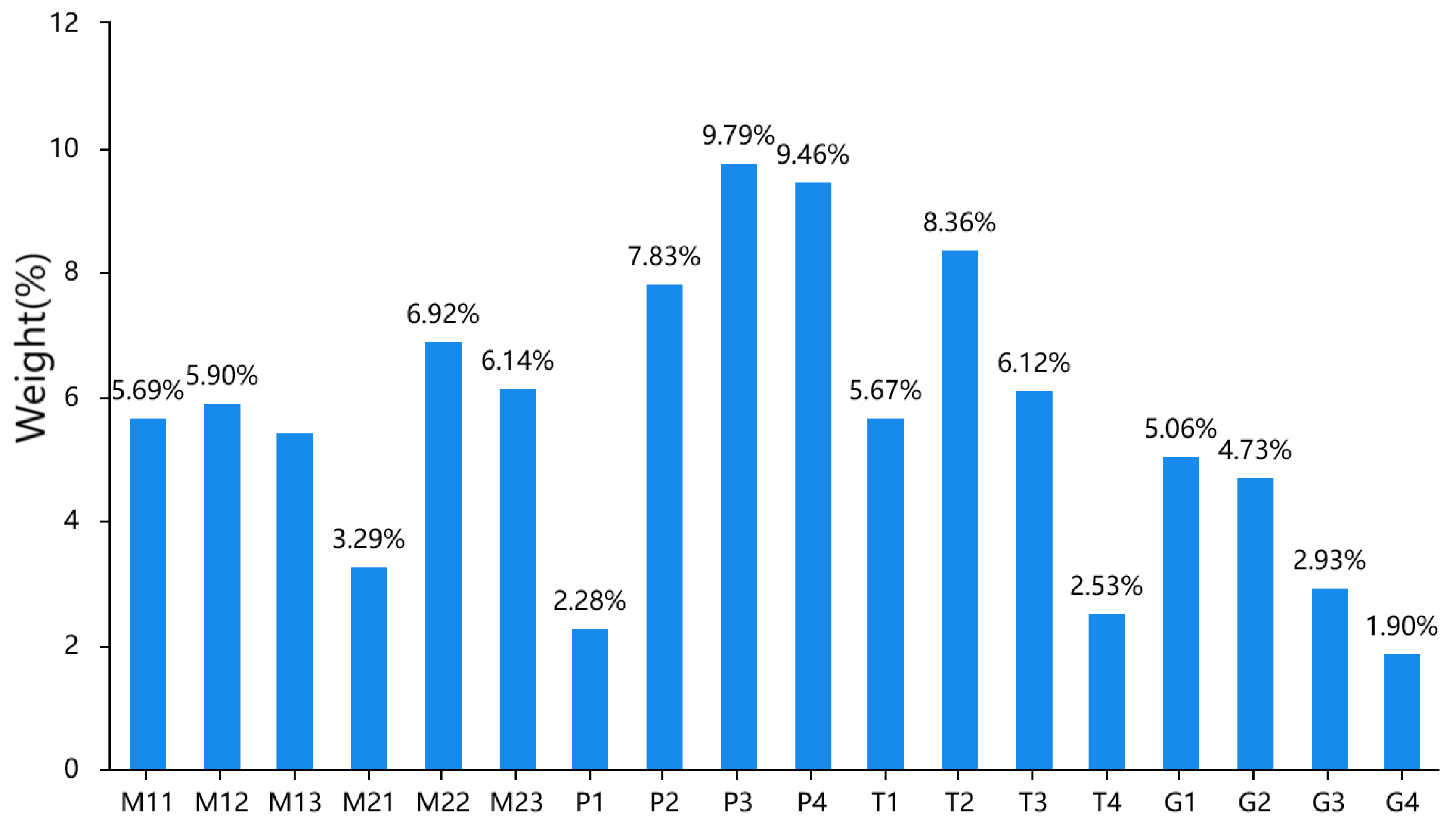
Figure 8.
Influential relation map.

Table 2.
Future prospects of eVTOL key technology.
| Research and Validation | Early Commercialization | Rapid Commercialization | Mature Commercialization | |
| Distributed Electric Propulsion | In a period of Strategic opportunities, Most tech inherited from NEV. |
Enhance efficiency, cutting energy use, and reducing emissions. | As the industry chain improves, electric propulsion system production costs will decrease gradually. | Enhance efficiency, manage costs, and incorporate intelligent automation |
| Low Aerodynamic Noise Technology | Reducing aircraft noise during takeoff, landing, and flight. | Optimizing multiple goals like noise reduction, energy efficiency, and emissions reduction | Achieve “Low Noise” or even “Zero Noise”, reduce cost | Reach the max limit, aligning with environmental sustainability goals. |
| Flight Control Technology | Primarily human-controlled with program assistance. | Primarily program-controlled with human assistance, The flight process is predominantly automated | Enable advanced autonomous operations, cooperative flight and remote control | Utilizing advanced technologies to create a global autonomous driving network |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



