
Submitted:
29 July 2024
Posted:
30 July 2024
You are already at the latest version
Abstract
Bioimpedance imaging aims to generate a 3D map of the resistivity and permittivity of biologi-cal tissue from multiple impedance channels measured with electrodes applied to the skin. When the electrodes are distributed around the body (for example, by delineating a cross-section of the chest or a limb), bioimpedance imaging is called electrical impedance tomography (EIT) and results in 2D functional images. Conventional EIT systems rely on individually cabling each electrode to master electronics in a star configuration. This approach works well for rack-mounted equipment; however, the bulkiness of the cabling is unsuitable for a wearable system. Previously presented cooperative sensors solve this cabling problem using active (dry) elec-trodes connected via a two-wire parallel bus. The bus can be implemented with two unshielded wires or even two conductive textile layers, thus replacing the cumbersome wiring of the con-ventional star arrangement. Prior research demonstrated cooperative sensors for measuring bi-oimpedances, successfully realizing a measurement reference signal, sensor synchronization, and data transfer though still relying on individual batteries to power the sensors. Subsequent research using cooperative sensors for biopotential measurements proposed a method to re-move batteries from the sensors and have the central unit supply power over the two-wire bus. Building off our previous research, this paper presents this method applied to the measurements of bioimpedances. Two different approaches are discussed, one using discrete, commercially available components, and the other with an application specific integrated circuit (ASIC). Initial experimental results reveal that both approaches are feasible, but the ASIC approach offers ad-vantages for medical safety, as well as lower power consumption and smaller size.
Keywords:
Bioimpedance imaging
; electrical impedance tomography (EIT)
; active electrode
; dry electrode
; cooperative sensor
; wearables
; medical device
; cardiopulmonary diseases
; respiratory diseases
; COPD
1. Introduction
Unlike other imaging modalities (e.g., MRI), bioimpedance imaging and electrical impedance tomography (EIT) [1,2,3,4,5,6,7] allow for time-parameterized maps of tissue resistivity and permittivity at a high frame rate. Bioimpedance imaging and EIT are safe and potentially inexpensive. Moreover, they can be made wearable. However, the spatial resolution is quite low (as compared to, e.g., MRI). The resistivity/permittivity maps can be processed further to provide non-invasive and wearable modalities, e.g., for pulmonary artery pressure (PAP) [8].
Today, most bioimpedance measurement products are still based on electrodes connected in a star configuration to a central unit (e.g., a recorder or monitor), as shown in Figure 1. A current, typically a cosine wave of magnitude and angular frequency , is produced by a current source and injected into the body via one current electrode and drained by another connected to an opposing current source . Depending on their implementation, the two current sources may not match exactly. In this case the mismatch current is drained through a third current electrode commonly called the neutral (N) or right-leg (RL) electrode (the left-most electrode in Figure 1). The RL electrode is also used to drain interfering currents picked up from the environment (e.g., 50 Hz from the mains), avoiding any risk of saturation of the electronics, in a mechanism known in biopotential measurement as right-leg electrode [9]. The injected/drained current results in a voltage drop across the impedance to be measured which is acquired in the same way as the biopotentials [9]. I/Q demodulation of this voltage (i.e., multiplication by and followed by low-pass filters) yields the ‘real’ and ‘imaginary’ parts of the impedance at a given angular frequency, i.e., where is called resistance and reactance. By separating the electrodes for potentials (called potential electrodes) from those used for currents (called current electrodes), the impedance can be measured without being affected by the skin/electrode impedances (tetrapolar method [9]). The cables connecting the potential electrodes use a shield driven by a unity-gain follower amplifier at the measured potential to avoid decreasing the input impedance of the measurement amplifiers. Current electrodes also use a driven shield to prevent capacitive current leakage. For wearables using dry electrodes and or high frequencies for current injection, the cables will leak current into the body through capacitive coupling. To avoid this capacitive leakage current that could interfere with the measurement of , a second grounded shield can be added [2].
The implementation of bioimpedance sensors in medical garments is difficult for several fundamental reasons. One is the preferential use of dry electrodes, which makes the demand for appropriate shielding more pressing as higher voltages are required to inject current through the higher skin/electrode impedance. Shielded and double-shielded cables are difficult to integrate into wearables, especially if many bioimpedance channels are to be measured. Active electrodes [2,3] are a well-known solution to avoid shields, but they need to be powered. Powering them from the central unit is not trivial when considering medical safety standards. The basic safety standard [15] for medical electrical equipment (capitalized words are defined terms in the standard) requires that the patient leakage current be no more than 10 μA d.c. Additionally, the standards require that two means of patient protection (MOPP) are used for safety. Double insulation of conductive tracks can be considered as one MOPP, however, this is difficult to achieve in wearables due to the possible presence of body fluids (e.g., sweat, urine, etc.). To be considered as a MOPP for a working voltage less than 60 V, solid insulation must pass the dielectric strength test at a voltage of 500 V rms for 1 min under the worst expected conditions (i.e., in the presence of body fluids and at the end of the expected service lifetime). Therefore, for wearable devices, other means of patient protection, such as electronic detection and active limitation of tiny patient leakage currents, are desirable.
Another reason complicating the development of wearable bioimpedance sensors is the challenge posed by the conventional star configuration for electronics cabling. Using one cable per sensor requires routing many cables that often require shielding or power signals, leading to bulky device. Additionally, each of the cables must be reliably connected to central unit. In the case of medical electronics that must be protected from moisture and body fluids, this necessitates the use of expensive and often large connectors. To solve these problems, an architecture where each electrode comprises electronics to be interfaced in parallel with a bus [4] is attractive because such an architecture is virtually independent of the number of electrodes. Buses with a small number of lines, such as one or two at most, are the most desirable, but more difficult because the bus must perform several functions (potential reference, current return, synchronization, communication and power supply). Cooperative sensors [16,17,18,19], defined as active electrodes connected to a parallel bus with up to two wires, have been proposed to address these challenges, with the exception of supplying power. On the other hand, 2-wire buses with communication and power supply—but without potential reference and current return for biopotential or bioimpedance measurements—have been described in the literature [10,11,12,13]. Recently, however, cooperative sensors measuring biopotentials have been extended to the power supply function, solving the problem of having a strong signal (power supply) orders of magnitude higher than the signal to measure [14]. Remotely powered cooperative sensors that measure bioimpedances have many similarities to those that measure biopotentials. However, certain key differences and complexities exist that are presented in this paper, which can therefore be considered as a companion paper to [14].
The paper is organized as follows. In Section 2 we present the prior state-of-the-art in cooperative sensors, which used a dedicated battery per sensor, as well as a bootstrap circuit to achieve high input impedance and efficient current sources. This section highlights the functions that must remain unaltered by the introduction of power distribution on the same wires. In Section 3, we present two power distribution solutions: one called the ‘legacy approach with 500 Hz powering and off-the-shelf components’ which builds on the prior work outlined in Section 2, and the other named ‘approach addressing the safety issue with powering at 1 MHz and ASIC.’ Implementation details and experimental results are provided for both approaches in Section 4, while Section 5 reports the conclusions.
2. State-of-the-Art Cooperative Sensors
Active electrodes connected by up to two wires in a parallel bus arrangement are called cooperative sensors— ‘cooperative’ because co-operation of sensors is required to obtain a difference of potential or to inject/drain a current. Compared to conventional approaches, cooperative sensors [16,17,18,19,20,21,22] benefit from a parallel bus arrangement. Moreover, unlike the multi-wire bus of direct multiplexing [4], the complexity of their connection is reduced to a minimum (only two wires for all functions).
2.1. Basic Circuits and Their Interconnections
Figure 2 shows a patented generic mechanism [16,17] for synchronization and control of the cooperative sensors (middle and right) and for transferring the acquired signal to the central unit (left). The latter includes the right leg (RL) electrode. For a given current channel, cooperative sensors can be potential or current electrodes. They are ‘potential electrodes’ when their purpose is to measure the potential (therefore with their current source in red in Figure 2 absent or set at zero current), and ‘current electrodes’ when their function is to injects a current (different from zero). The central unit uses voltage source to transmit synchronization information and other commands simultaneously to all cooperative sensors. The cooperative sensors receive the signal as a voltage across their current source in black, i.e., the voltage between the two bus wires. This received voltage then feeds the clock recovery and the synchronization block, S. The cooperative sensors communicate data such as the measured potential back to the central unit by modulating the current with the block M. For bioimpedances, the modulator M in Figure 2 implicitly includes before modulation for transmission an IQ demodulation to extract . Note that the voltage in current electrodes can be used to measure the skin/electrode impedance. As this voltage is much higher than that of potential electrodes, the amplifier shall have a lower gain when . The central unit receives the composite information from all the sensors by measuring the current in the bus wires. Signals from an individual sensor are then recovered by the demodulation D. Note that multiple modulation schemes are possible, including amplitude modulation or digital phase shift keying with the addition of a digitization step. The dark gray box symbolizes the power supply (e.g., a battery) in each cooperative sensor.
A benefit of the cooperative sensor architecture is that the two-wire bus can also be implemented using conductive textiles, as shown in Figure 2. In this case, one side of the cooperative sensor is used as dry electrode while the other side interfaces to the conductive fabric. Contact with the top conductive layer is then provided by the fastener. In the form of an ASIC, the cooperative sensors can be very small (e.g., 4×4 mm2) while the dry electrode and the contacts to the fabric can be larger and flexible. Using this approach, the assembly of cooperative sensor textiles is virtually seamless and cable free, reducing the impact of wearability constraints such as flexibility, breathability, stretchability, and washability. Within the central unit, controller ensures that the voltage between the lower conductor and the body is approximately zero. The portion of the bus is not in contact with the patient and can only be touched intermittently, for example with the hand. This situation presents a safety problem that can be solved by electronically detecting leakage currents and stopping operation of the device if a threshold is exceeded. Intermittent system operation is undesirable though, so an additional layer of fabric could be used to insulate the top conductive side for most situations, while electronic detection could then be used in rarer exceptional situations. This approach could be extended by making the outer side of the additional fabric layer conductive and connecting it to the skin. This is similar to how class I ME equipment is designed [15] and provides one mean of patient protection. Furthermore, this extra conductive layer would shield the middle conductive layer with respect to EMC emission, providing greater immunity in demanding applications or environments.
Figure 3 shows two possible configurations for EIT, i.e., for the measurement of multi-channel bioimpedances. The orange area with the central impedance symbolizes the tissues and the bioimpedances to be measured. Figure 3a has two types of sensors, one with a potential electrode and one with a current electrode (with odd and even numbers, respectively), whereas the sensors in Figure 3b are all identical with either a potential or current electrode depending on their current being equal to 0 or not. Between the electrodes ⑥ and ⑦, the ‘pass-through’ symbol indicates that there is virtually a direct connection (no skin/electrode impedance) between the back wire and the body tissues. This effect [21] is achieved by the RL electrode and its controller (see Figure 2) that ensures that the potentials of the wire and the body tissue are identical, regardless of the current flowing through the skin/electrode impedance at the RL electrode. The scheme in Figure 3a is generally preferred when all current channels are activated simultaneously (for instance, each with a carrier at a dedicated frequency). Figure 3b is more common, as the current channels have time carriers (i.e., time multiplexing). As a result, the current is zero most of the time, which means that at any given time there is only one pair of sensors with current electrodes—all others sensors have a potential electrode. The current channels are usually an injection of current by one current electrode (e.g., ②) and the draining of this current by another (e.g., ⑧). However, especially in the case of Figure 3a, more complex patterns can be defined. For instance, instead of having only one injection electrode, half of the current can be injected by sensor ② and a quarter by sensors ④ and ⑯ each.
2.2. Floating Supply, Bootstrapping, Current Source, and Current/Potential Wire Separation
Figure 4 shows in more detail an implementation of cooperative sensors for bioimpedance measurements [18,19]. In this implementation, each cooperative sensor is separately powered by a battery which is cumbersome, but intrinsically safe and simpler than remotely powered sensors [14]. The input impedance of the amplifier of is also the output impedance of the current source . This impedance is significantly increased by a power supply bootstrapping approach [20] that takes advantage of the degree of freedom provided by the floating power supplies (i.e., battery) of cooperative sensors. The electrode potential connected to the negative input and the middle potential of the power supply connected to the positive input are made equal by the operational amplifier. The increase of impedance allows an easy implementation of an efficient current source, illustrated in red in Figure 4 with a voltage source in series with a high resistance . In this example, the impedance seen from outside is not but , where is the open-loop gain of the operational amplifier. Moreover, this simple current source has a rail-to-rail voltage range (in contrast with other current source implementations, e.g., Howland current source). Note that the electrode and its connection to the operational amplifier are shielded with the middle potential of the power supply in a manner equivalent to the driven shielding of classical techniques.
The current injected through the electrode returns via the body, the central unit (or another sensor with opposite current injection), the upper wire, and finally the output of the bootstrap operational amplifier. The sensor measures the electrode potential with respect to the lower wire. As no (bioimpedance) current flows in this wire, the impedance of the wires does not affect the bioimpedance measurement. This feature is particulary important if the wires are implemented as conductive tracks in a garment, since their impedance may significantly varies when they are stretched.
3. Method
In this section, we present two different solutions for remote powering cooperative sensors used to measure bioimpedances. The approach is similar to that described in [14] for biopotentials, but addressing the additional demands required by the measurement of bioimpedances.
The first solution (Section 3.1) describes how remote powering is added to the two-wire bus without adding noise to the measure bioimpedances and without disrupting synchronization and communication between the sensors and the central unit. Section 3.2 then addresses how remote powering can be made safe for medical regulations while significantly reducing the volume of the sensors (e.g., from 7.5 cm3 to 0.3 cm3) and the power consumption (e.g., from 5.8 mA to 150 µA), while additionally detailing circuit strategies for measurement, current injection, and management of return currents.
3.1. Legacy Approach with 500 Hz Powering and Off-the-Shelf Components
Figure 5 shows a modified version of the circuit in Figure 2 with remote powering circuitry. In this scheme, the voltage source of the central unit provides power to the 2-wire bus that is then “harvested” by the cooperative sensors. Harvesting power from the bus is depicted in Figure 5 by a current source whose current is in phase with the voltage (power is consumed when current and voltage are in phase).
It is important that the power supplied from the central unit does not disturb the measurements. Although the resistance of the bus wires may be low, the supply current is high, so the voltage drop on the lower wire will add to the voltage of interest, . To avoid interference, the power supply frequency can be placed outside the frequency band of the measurements. The first order bandwidth of the bioimpedance is, for example, 40±0.5 kHz for 25 current channels and 40 frames per second. Therefore, powering could be done at 0 Hz. However, if the biopotentials are to be measured simultaneously by the same sensors, [14] has shown that 0 Hz is not a good choice. The first solution described in [14] proposes powering with a square wave at 500 Hz. Interference with the bioimpedance measurement must be expected at 500 Hz and its harmonics, i.e., 1 kHz, 1.5 kHz, 2 kHz, … If the frequency band for biopotential measurements is chosen at, for instance, 40±0.5 kHz, possible interferences could be expected at 39.5, 40.0, and 40.5 kHz. IQ demodulation will shift this band to −500, 0, and 500 Hz. The other harmonics of the powering will also be shifted, but will remain at frequencies 1 kHz, 1.5 kHz, 2 kHz, … When sampled at 1 kHz, all these spectral lines will create aliases at 0 and 500 Hz and therefore, an anti-aliasing filter must be used to reduce their power. A delta sigma analogue-to-digital converter as used for biopotentials in [14] can efficiently avoid aliasing at 0 Hz, but there will still be some aliasing at 500 Hz. Moreover, at 0 Hz there will still be the original 40 kHz harmonic, which is small, however, because it is the 100th harmonic. Moreover, for most applications, the useful bioimpedance signal is in the respiration or cardiac bands that do not include 0 Hz, i.e., a high pass comb filter is used to remove the 0 Hz component of the bioimpedance signal (which is for 25 current channels at 0 Hz, 40 Hz, 80 Hz, …). The 500 Hz alias can be removed with a notch comb filter at 20 Hz (i.e., the Nyquist frequency of the bioimpedance channels) if the number of current channels is odd (e.g., ) since 500 Hz is in the middle of the bioimpedance spectra.
The harmonics generated by the 500 Hz power supply frequency are of low enough amplitude to avoid significant interference with the digital communication (the 2 Mb/s of [18,19] were modified to 1.28 Mb/s, in both directions, to conform to the frequency required by the delta-sigma converter to sample at 1 kHz). It was observed, however, that bits near the rising/falling edges of the 500 Hz power signal were disturbed, so these bits were removed from the communication payload. In our prototype, 110 bits were removed in total, reducing the throughput by 17%.
In Figure 4 and [18,19], upstream communication (from the central unit to the sensors) is implemented as a voltage source and the downstream channel (from the sensors to the central unit) as current sources. Alternatively, the upstream and downstream channels could be interleaved through time domain multiplexing to allow both channels to use either voltages or currents to communicate. In Figure 5, the current sources are implemented with the Thevenin equivalent voltage source with a resistance in series because practically this is easier to implement using the digital output pin of a microcontroller or FPGA. The capacitor, inductor, and resistor are chosen to create a first-order bandpass filter that filters the communication band from the biopotentials while simultaneously attenuating the high frequency harmonics from the digital signal. Note that , , and are configured in parallel in both the central unit (voltage source at 0) and in the sensors (the capacitance in series with the inductance is chosen so that its impedance is negligible at communication frequencies). The received signal is then measured as the voltage across the RLC circuit. The digital signal can then be reconstructed with a high-pass filter and Schmitt trigger before demodulation in the D block to obtain .
A consequence of putting the cooperative sensors in parallel on the 2-wire bus is that there is a practical limit to the number of sensors that can be connected. The LC circuit attenuates current at the communication frequency such that the voltage on the RLC circuit is effectively a voltage divider consisting of the transmitter’s resistance and all other resistances of the receivers in parallel. Consequently, the received voltage is the transmitter voltage divided by the number of receiving units (i.e., sensors and the central unit). This approach practically limits the number of units to approximately 25.
The 500 Hz supply square wave is generated in the central unit by the voltage source , which can easily be implemented using switching transistors. Since the inductances of the central unit and sensor are tuned for the communication frequencies, they have a negligible impact on the supply current. The 500 Hz square wave can thus be rectified by diodes in the sensors to generate a positive and negative voltage rail across the storage capacitors.
In the implementation of Figure 5, there is no floating power supply and therefore no bootstrap as in Figure 4. The current source must be designed with high output impedance. Moreover, its current returns via both upper and lower wires, thereby affecting the measurement of the electrode potential since the lower wire is used as reference potential.
3.2. Approach Addressing the Safety Issue with Powering at 1 MHz and ASIC
While the circuit in Figure 5 reduces power supply interference with bioimpedance measurements and with communication on the 2-wire bus, it does not address safety for medical devices. In medical device standards, the allowed patient leakage current at 500 Hz is 100 μA for type bf devices [15], which is already ten times higher than the allowed current at d.c. However, measuring a 100 μA leakage current by monitoring the power supply signal is a difficult task. Assuming a per sensor consumption of 8 mA (see next section) and 25 sensors, the supply current on the bus is 200 mA, requiring accurate measurement of 1 part in 2000. In addition, all sensors would require a current source buffer that could make closed-loop adjustments to ensure the current at each sensor is precisely 8 mA.
To better ensure compliance with the allowed patient leakage current, the power consumption of the sensors should be reduced (e.g., by a factor of 20 down to 400 μA) and the power supply frequency should be increased, e.g., to 1 MHz where the standards allow up to 10 mA of leakage current. These changes facilitate detecting excessive leakage current (1 part in 1). Note that the 8 mA and 400 μA mentioned above are the current of a sensor measured in the bus. The sensor itself consumes half of this current, i.e., 4 mA and 200 μA, respectively. The factor-of-two difference arises from the conservation of energy: the supply voltage is with a current of (rms value for square waves) which allows sensors with the dual half-wave rectifier to have a supply and current for the electronics.
To reduce power consumption by a factor of 20, we developed an ASIC (application-specific integrated circuit) that optimized each electronic function. In addition, we eliminated the digitization (analog-to-digital converter). The transmission of analogue values instead of bits has also increased the throughput (which allows considering other signals, in our case the sound picked up by a stethoscope embedded in the electrode). The 1 MHz power supply is now interleaved with the communication, i.e., in every two periods there is one for power supply and one for communication [22]. Figure 6 depicts the design. The inductances are no longer needed, which is beneficial given the challenges of integrating inductors in silicon. The rectifier diodes allow the storage capacitors to be recharged (harvesting period) when the voltage on the bus is high enough. When the voltage is low enough for the diodes to be in blocked state, the communication current source of one sensor is used to transmit the information to the central unit. For the other sensors, the current source is disabled (i.e., no current is consumed by these sensors during the communication period). Therefore, the central unit decides if the period is a harvesting or communication period with the level of the voltage . As shown in Figure 7, by choosing if the harvesting period follows or precedes the communication period, the central unit can send a 0 or 1 bit to the sensors (Manchester code). This upstream communication channel may be used for instance to configure the sensors. Note that the Manchester code always has a transition (H to L or L to H) in the middle of its period (see blue edges in Figure 7). Therefore, two harvesting periods in a row (H to H separated by a blue line) can easily be interpreted by the sensors as a synchronization marker rather than a 0 or a 1. From this marker, every sensor can count the number of edges and recognize its communication period defined by its ID. Note that this scheme is similar to that described in [14] but simpler in the sense that the edges are always regular and can readily be used as clock signal (without the need of PLL or timer).
The regulated supply rails VCCF and GNDF (specific for each sensor) can be bootstrapped by using a follower to control the reference potential of the LDO voltage regulators. Assuming an LDO gain, (i.e., the LDO outputs a current where is the voltage error of the LDO output), the input impedance of the open-loop circuit is magnified by at low frequencies. High gain at low frequencies can be achieved if (see Figure 6) behaves like a capacitance at low frequency. At higher frequencies, for stability reasons, it is preferable for to behave like a resistance. The open loop input impedance is essentially the input impedance of the follower (typically 10 pF). The bootstrap magnifies this impedance by , allowing the circuit to have a very high input impedance at low frequencies [22]. Compared to Figure 5 where bootstrapping is not implemented, this bootstrap also makes shielding of the sensor input more efficient and natural, as the ground and power rail planes implicitly provide driven shielding. Additionally, the output impedance of the current source ( in Figure 5) as seen from the body is magnified by the bootstrap. If is an order of magnitude larger than the lower wire impedance (which is easily the case), the part of injected current that is conducted by the lower wire is negligible. As a result, the bioimpedance measurement is not affected by the wire impedance.
Before transmission, the biopotential is filtered by the voltage divider , , amplified, and IQ demodulated. The filter is a band-pass filter centered at 50 kHz (EIT current frequency of the ASIC variant) that removes the electrode offset (up to 300 mV) and possible biopotentials (generally lower than 10 mV). A perfect IQ demodulation would not require such filtering since the multiplication of the signal by a cosine at 50 kHz would swap the bioimpedance and biopotential bands. But in practice it cannot be perfect, and the high-pass filter will prevent residual biopotential in the demodulated bioimpedance signal. Most of the bioimpedance signal is at or close to 0 Hz (typically 98–99%). However, the signal of interest is generally at breathing or cardiac frequencies. Therefore, compression of the low frequencies (with a filter inverse to a low-pass filter) is advisable before transmission. At reception by the central unit, the original signal can be decompressed with a low-pass filter. When the bioimpedance signal is the result of more than one current channel, such compression filter has also to be applied shifted at 40 Hz, 80 Hz, … (comb filter). This pre-processing improves the signal-to-noise ratio of the analog communication. Figure 8 shows a possible implementation of the comb filter with transfer function with (z transform variable), kHz (sample rate), (number of current channels), and
where Hz (corner frequency chosen here as the lowest respiration frequency) and (compression factor of the bioimpedance signal at 0 Hz). The current sample voltage is applied over and in series, with the capacitance having been shorted (switch closed) just before. The charge accumulated by and in series is copied, thanks to the operational amplifier, in the capacitance (also shorted just before). The resulting transfer function is therefore:
When the switch is open, the charges in the capacitance are held (sample and hold function) and the potential is ready for transmission. While switch is open and as soon as the voltage has been transmitted, switches and can be closed. They are reopened before another switch is closed for the next sample. The memorized value in is available 25 samples later.
The M modulator (see Figure 6) selects the correct time slot for the sensor to communicate. All sensors are synchronized to sample their electrode potential simultaneously, and the measured value to be transmitted is stored in a capacitor until being transmitted. While this paper describes the measurement of bioimpedance, the developed ASIC can also measure biopotentials [14] and, if interfaced with an electret, body sounds (stethoscope).
3.4. Comparison to Existing Work
A comparison with existing work is presented in Table 1 to highlight the novelty of this work. Remotely powered cooperative sensors are unique in that they do not require a local power supply (e.g., one battery per sensor), enabling miniaturization and easier integration, among other benefits. Compared to the work published in [14] where only the measurement of biopotentials was addressed, this paper focuses on the measurement of bioimpedances and the needed additional circuits. Note that being able to monitor the leakage currents allows wearables to be compliant with medical safety standards without relying on the insulation of conductors in a garment and without the need for waterproof connectors.
4. Results
4.1. Legacy Approach with 500 Hz Powering and Off-the-Shelf Components
4.1.1. WELMO Vest
Figure 9 shows the WELMO vest developed in the context of a European project for the remote detection of COPD exacerbation of lung patients [23,24,25,26,27,28,29,30,31,32,33,34,35]. The EIT chest strap is based on the approach shown in Figure 5. The central unit is the small device visible at the bottom of the vest. The central unit is powered by an IEC 62 133 battery and is used to record data and provide wireless communication. The sensors are designed around a complex programmable logic device (CPLD) that implements the PLL and internal clock reconstruction, interfaces to a 24-bit delta-sigma converter, and communicates to the central unit over the bus. The sensors interface to the two-wire bus through two metal electrodes in the top part of their plastic housings. The wires in the belt end on attachment washers (realized as PCBs made of FR4) onto which finger spring contacts are mounted. The sensors are brought into contact with the finger springs by screwing them onto the attachment washers. For this, there are threaded holes in the electrodes in the top part of the plastic housings (see photo in the bottom line in the middle row in Figure 9). The housings further protect the electronics against moisture (IPX6 accoring to IEC 60 529).
A simplified electronic schematic implementing the principles from Figure 5 is shown in Figure 10. The central unit is connected via a 2-wire bus to a chain of cooperative sensors. The voltage source of the central unit (see Figure 5) is implemented with switching transistors that alternate between the battery (4.6 V) or a bypass (0 V). Both the central unit and the cooperative sensors harvest power from the two-wire bus with dual half-wave rectifiers. The offset of (2.3 V) is removed by a capacitor connected upstream from the half-wave rectifiers. The capacitor provides a bipolar VCC/GND supply ( V) that is symmetrical with respect to REF, the potential of the lower line of the two-wire bus. To communicate over the 2-wire bus, an impedance is connected to a digital output of the CPLD (Logic), creating a Thevenin equivalent to a current source. For receiving data, a Schmitt trigger is used to regenerate the edges of the received signal and output them to the CPLD.
To keep the implementation simple, the central unit in Figure 10 has two electrodes (textile electrodes ① in Figure 9). Therefore, the controller is analogue (the operational amplifier) since the signal comes from the extra electrode of the central unit. The same communication principle as described in [19] is used. The sensor electrode is connected to the positive input of an operational amplifier. Two resistances define the gain of the first amplification stage ②. The signal is then IQ demodulated thanks to the multiplication with a square wave implemented with two double switches ③ and an RC low-pass filter ④ (in Figure 10, only the resistive part of the bioimpedance is demodulated). This RC low-pass filter implements the coarse antialiasing filter required by the delta-sigma converter (i.e., a more agressive filtering is obtained by the digital filter of the delta-sigma converter). An instrumentation amplifier ⑤ allows a last stage of amplification before the delta-sigma converter.
The current source fo the injection of the current is implemented by the circuit in red (see Figure 10). The CPLD produces the square wave digital signal according to the pattern of the current channels. An instrumentation amplifier allows to apply this square wave voltage across the resistance for its translation to current. The capacitance prevents any current at low frequencies to disturb biopotential measurements (not shown in Figure 10).
The WELMO vest has 18 cooperative sensors, six measuring chest sounds (stethoscopes) and 16 for EIT (some sensors combine both functions). The current channels are defined as shown in Table 2. Note that with this definition, the 16th channel is linearly dependent on the others and therefore, with this definition, the information is approximatively equivalent to 15 current channels.
The average noise when measured on a 56 Ω resistance is 45 mΩ (rms) in the full bandwidth (0–20 Hz). However, a few sensors have a noise of 15 mΩ (rms) and one exceeds 100 mΩ (rms). The reason for this dispersion could not be identified yet. In the respiration band (0.25–2.5 Hz) the average noise is reduced to 15 mΩ (rms). By increasing the injection current by a factor of 10 in the next development, we expect to reduce this noise to about 2 mΩ, a target similar to [7]. The new current will then be at 1 mA, still compliant with the safety standard [15] that allows a maximum at 4 mA for 40 kHz.
4.1.2. Calibration
The injected currents by the EIT device are denoted by the matrix () and the acquired potentials by the matrix (), where the rows correspond to the sensors and the columns to the current channels. Due to imprecision of the electronics, the injected currents may slightly differ from the intended currents and the acquired potentials from the electrode potentials . Performing the EIT processing with instead of may result in errors since the resistance (or impedance matrix) () maps , i.e.,
Therefore, it is better to calibrate the EIT device, i.e., find the function that maps so that can be used for the EIT processing. The following model is considered:
where are matrices, matrices, and a matrix. Matrices and are diagonal because there is no possible coupling between sensors (only the gain of the current sources or amplifiers must be modelled) and matrix can be arbitrarily set equal to the identity matrix (since and appear in a product in ). If are known, then can be obtained from with:
The values of can be computed with a least-mean-square approach, i.e., by defining a quadratic function that has its minimum at the solution. The function is defined as:
where is a vector of dimension 1057 (16+25×25+16+16×25) stacking the elements of the matrix:
where and are the potential and resistance matrix corresponding to configuration , is the element-wise multiplication (.* in Matlab), and a matrix that has all its elements equal to 1 expect for those equal to corresponding to current-injecting electrodes:
where is the attenuation gain of the amplifier measuring the potential of the current electrodes.
A gradient descent method finds the minimum of starting with initial guess , where 1 and 0 are the identity and zero matrices. The iteration equation is:
with a small increment (e.g., for every entry, in turn).
Sixteen configurations were measured with two resistors . The two first configurations are shown in Figure 11 (the others being a rotation by one electrode further on the same model as from configuration and of Figure 11).
Figure 12 shows an example corresponding to the configuration of the errors (top) and , i.e., after calibration (bottom). The optimisation process resulted in an improvement by an order of magnitude (from ≈ 5 Ω down to ≈ 0.5 Ω). Overall, after calibration, the accuracy of WELMO when measuring a resistance of 56 Ω is 0.5 Ω, i.e., better than 1%.
4.2. Approach Addressing the Safety Issue with Powering at 1 MHz and ASIC
4.2.1. ASIC Architecture
The ASIC architecture is similar to that described in [14], except for the injection of current and potential amplification, AM demodulation, and comb filter. It can be mainly divided into two sections, as shown in Figure 13. The first section, in red, provides the interface to the two-wire bus. At startup, the power management unit uses the power square wave generated by the central unit to turn on all internal power supplies. After this is accomplished, a delay-locked loop in the clock and timing recovery block listens for the sync marker in the 1 MHz square wave. The sync marker is a periodicity break that marks the beginning of a sequence of 1 000 000 periods, i.e., there is sync marker every 1 s (see [14]). The power management harvests current from the bus only every other period. The other periods are used for communication. Only the ASIC whose ID corresponds to a given communication slot transmits its acquired sample to the central unit.
The second section of the ASIC, shown in green in Figure 13, provides the injection of current and signal chains for the measurement of electrode potential as results of the current injection of other sensors. This signal chain includes amplification, AM demodulation (multiplier) to shift the bioimpedance signal in baseband, and the comb filter. Moreover, additional sensing functionality, such as a stethoscope, represented in Figure 13 by an electret, an amplifier, and a filter, is also part of the ASIC.
The potential acquisition chain starts with a unity gain buffer, as shown in Figure 13. The output of the reference buffer is used as a ‘floating reference’, that is, it is used as a ground reference for a positive and negative supply rails that feed the reference buffer itself (see more details in [14]). With this bootstrapping approach, the buffer supply perfectly follows the (a.c.) potential to be measured. As a result, the voltage on the parasitic capacitances at the input is asymptotically close to zero and, thus, virtually no current flows. This is equivalent to a drastic increase of the input impedance for the amplifier and output impedance for the current source.
4.2.2. Central Unit Architecture
The central unit implementation presented in Figure 14 is identical to that described in [14] and is based on the approach shown in Figure 6. The two wires A and B of the bus are powered by the voltage source —a square wave at 1 MHz with a voltage of . Every other 1 MHz period, the sensors are not powered by the bus. Instead, one of them—as determined by its address—sends into the transimpedance capacitor, during the period when , a quantity of electrical charge proportional to the measured potential. The voltage at the terminals of this capacitor is then sampled by the analog-to-digital converter (ADC) to be demodulated by the microcontroller. After sampling, the transimpedance capacitor is reset by shorting its terminals with a switch. The controller in Figure 6 is implemented with a pass-through as in Figure 10.
4.2.3. Sensor Housings
The sensor housings shall best reflect the small volume made possible by the ASIC electronics, be simple to assemble, protect the electronics from mechanical shocks and moisture, and provide the electrical contacts with the two wires and the skin.
Figure 15 shows a cut view drawing implementing these requirements. An ASIC (not shown) is mounted on a PCB ①, together with few additional electronic components (such as spring contacts, shown in yellow in Figure 15 on the top and on the bottom of the PCB). The housing itself is made of a bottom piece ② and a top piece ④ which are glued together during assembly and thus provide a watertight enclosure. An electrode which contacts the skin ③ is overmolded in the bottom piece, and two electrodes ⑤ which contact the wires are contained in the top piece. Note that Figure 15 only shows one half of the sensor, and therefore only one electrode contacting the wires is shown. A clamp ⑧ presses the sensor onto the wires which are realized as stripes of electrically conductive textile ⑥, mounted on the surface of a thin compressible 3D knit ⑦. The springiness of the 3D knit provides the contact force between the electrically conductive stripes and takes up possible dimensional tolerances in the assembly. The clamp is secured on the other face of the textile belt ⑩ with a semi-rigid reinforcement ring ⑨. While the textile conductive tracks and the 3D knit are continuous, the textile belt has holes into which the sensors are placed. The sensor is fixed on the clamp with a nose similar to the one on the reinforcement ring and a notch in the housing (not shown).
4.2.3. Implementation Results
The verification of the ASIC and central unit has been done with the setup shown in Figure 16. Two sensors (ASIC) are configured to let a current (100 µA) circulate through a resistor and two others to measure the resulting voltage drop. The maximum range is −255 to 255 Ω (the value is negative when the resistance current is opposite to the resistance voltage). Therefore, 0.02% resistors of 0, 50, 100, 150, 200, and 250 Ω are used for the test. Table 3 provides the obtained results. The linearity is better than 0.3% FS. The noise is about 30 mΩ rms in the 0.25–2.5 Hz respiration band, i.e., similar to the noise obtained with the legacy approach of section 4.1. A higher current than 100 µA can be used to reduce this noise toward the targeted 2 mΩ rms [7]. The frontend amplifier can as well be improved (a misunderstanding of the requirement during the ASIC design is at the origin of this discrepency, because to get 2 mΩ rms, the amplifier noise must not be at 2 mΩ × 100 µA but at this value divided by the number of channels, here 25). Tests with more than 4 sensors will be possible after the correction of another bug in the ASIC (see also [26]).
The input impedance (Cin) of the frontend amplifier has been measured with the setup shown in Figure 17. The sensor is in the potential measurement mode (EIT current set to zero) while a voltage source at 50 mV / 50 kHz with a series capacitance of 10 pF is connected to its input. The 10 pF capacitance makes with the input impedance a voltage divider. Therefore, measuring the voltage across the 10 pF capacitor allows the estimation of the input impedance. Thanks to bootstrapping (see section 3.2), the overall input capacitance is lower than 0.2 pF.
Figure 18 shows how the ASIC sensors are realized as thin, coin-sized parts, integrated in a textile harness. As discussed in Figure 9, the harness contains textile electrodes and tightly fits the body to ensure a good contact between the sensors and the skin. The sensors are mounted on a belt which is secured to the harness with loops. The belt contains two conductive tracks, realized as tapes glued to a woven stripe and placed on top of a 3D knit (see middle row of Figure 18). A custom-made clamp attaches the sensors to the belt and presses them against the conductive tapes. The assembly is finished by placing the belt textile containing a reinforcement ring on top of the conductive tapes. During this assembly step, the noses on the clamp pointing outwards in the middle row of Figure 18 snap in place on the reinforcement ring.
5. Conclusion
The two developments presented in this paper have demonstrated the feasibility of cooperative sensors for medical imaging wearables for bioimpedances. The main contribution is the disclosure of circuits that allow remote powering of cooperative sensors via their two-wire bus in the context of multi-channel bioimpedance.
Cooperative sensors are ideal for bioimpedance imaging wearables because they do not suffer from the wiring complexity of conventional star arrangements. In an initial development, we demonstrated that EIT (electrical impedance tomography) can be implemented with remotely powered cooperative sensors.
A second development in the form of high-frequency remotely powered ASICs to enable detection of hazardous leakage current has been demonstrated. Moreover, this new variant benefits from an original bootstrapping approach that, in addition to the increase of the input impedance of the frontend amplifier and the output impedance of the current source, allows a clear separation of return current and potential reference from the two wires of the bus (one wire for each function). This is important to avoid the bioimpedance signal to be disturbed by changes of wire resistances (e.g., in case the wires are implemented as stretchable conductive textiles). So far, the demonstration is limited to 2 sensors for the current injection and 2 sensors for the potential measurement. A next iteration to correct some implementation errors and defects is needed to address more sensors.
In addition to the challenge of combining on the same two-wire bus remote power supply, microvolt potential measurements and return bioimpedance current on separate wires, synchronization, and communication, a significant difficulty addressed in this paper is compliance with medical standards for leakage currents in the context of wearables that can hardly provide reliable waterproof double insulation of electrical connections. Although leakage current detection was not implemented during this development, the design was made to address this issue by proposing power at frequencies where a leakage current can be detected by the central unit by monitoring the current.
6. Patents
The work presented in this paper is based on patent [22].
Funding
This research was funded by the Horizon 2020 Framework Programme of the European Union under grant agreement no. 825572.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Figure A1.
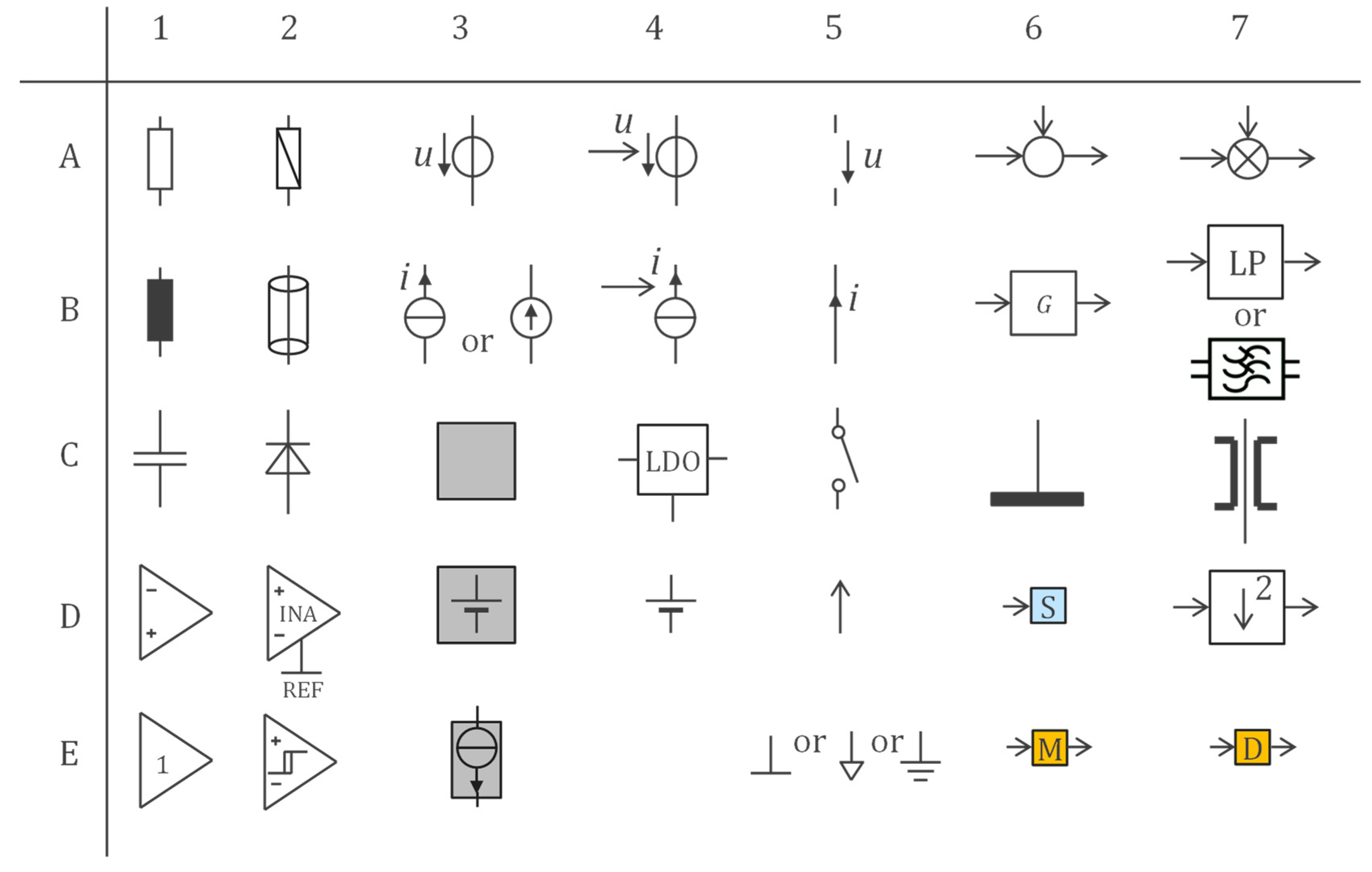
Symbol legends used in figures. A1: resistance, A2: impedance, A3: voltage source, A4: controlled voltage source, A5: voltage (between two conductors), A6: summator, A7: multiplicator, B1: inductance, B2: shielded cable (e.g., coaxial cable), B3: current source, B4: controlled current source, B5: current (in a conductor), B6: transfer function, B7: low-pass filter, C1: capacitance, C2: diode, C3: power supply block, C4: LDO (low-dropout regulator), C5: switch, C6: electrode, C7: pass-through (combination of RL electrode with controller G resulting virtually in a 0 Ω connection with the body core), D1: operational amplifier, D2: instrumentation amplifier, D3: power supply including a battery, D4: battery, D5: connection to positive power-supply rail, D6: clock recovery and sync block, D7: down sampling by 2, E1: follower, E2: Schmitt trigger, E3: power supply block harvesting energy with controlled current, E5: common ground, E6: modulator, E7: demodulator.
Figure A1.
Symbol legends used in figures. A1: resistance, A2: impedance, A3: voltage source, A4: controlled voltage source, A5: voltage (between two conductors), A6: summator, A7: multiplicator, B1: inductance, B2: shielded cable (e.g., coaxial cable), B3: current source, B4: controlled current source, B5: current (in a conductor), B6: transfer function, B7: low-pass filter, C1: capacitance, C2: diode, C3: power supply block, C4: LDO (low-dropout regulator), C5: switch, C6: electrode, C7: pass-through (combination of RL electrode with controller G resulting virtually in a 0 Ω connection with the body core), D1: operational amplifier, D2: instrumentation amplifier, D3: power supply including a battery, D4: battery, D5: connection to positive power-supply rail, D6: clock recovery and sync block, D7: down sampling by 2, E1: follower, E2: Schmitt trigger, E3: power supply block harvesting energy with controlled current, E5: common ground, E6: modulator, E7: demodulator.
References
- Adler, A.; Holder, D. , (Eds.) Electrical Impedance Tomography—Methods, History and Applications, 2nd ed.; CRC Press. ISBN 9780367023782. 2022.
- Yang J. The investigation and implementation of electrical impedance tomography hardware system, PhD Thesis of De Montfort University. dora.dmu.ac.uk/bitstream/handle/2086/19303/Jieqiu Yang.pdf. 2006.
- Lee, MH. et-al, Portable multi-parameter electrical impedance tomography for sleep apnea and hypoventilation monitoring: feasibility study, Physiol. Meas. 39 (2018),. [CrossRef]
- Gaggero, P.O. ,Miniaturization and distinguishability limits of electrical impedence tomography for biomedical application, phD thesis, https://doc.rero.ch/record/24734/files/Gaggero_Pascal_Olivier_-_Miniaturization_and_Distinguishability_Limits_UNINE_THESE_2207_2011.pdf.
- Qin Shaojie, Yao Yulong, Xu Yuqing, Xu Danling, Gao Yuan, Xing Shunpeng, Li Z, Characteristics and topic trends on electrical impedance tomography hardware publications, Frontiers in Physiology, 13, 2022,. [CrossRef]
- Mosquera, Víctor & Rengifo, Carlos. (2020). Electrical Impedance Tomography: Hardware Fundamentals And Medical Applications. Ingeniería solidaria. 16. 1-29. [CrossRef]
- M. Kim, J. Bae, and H.-J. Yoo. Wearable 3D lung ventilation monitoring system with multi frequency electrical impedance tomography, in 2017 IEEE Biomedical Circuits and Systems Conference (BioCAS), 2017, pp. 1–4. [Online]. [CrossRef]
- M. Proença, F. Braun, M. Lemay, J. Solà, A. Adler, T. Riedel, F.H. Messerli, J.-P. Thiran, S.F. Rimoldi, E. Rexhaj. Non-invasive pulmonary artery pressure estimation by electrical impedance tomography in a controlled hypoxemia study in healthy subjects. Sci Rep (2020). 10(1):21462. [CrossRef]
- Webster, J.G.; Clark, J.W. (Eds.) Medical Instrumentation: Application and Design, 4th ed.John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- E. Wade and H. H. Asada, “Cable-free wearable sensor system using a DC powerline body network in a conductive fabric vest,” The 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 2004, pp. 5376-5379. [CrossRef]
- J. Akita, T. Shinmura and M. Toda, “Flexible Network Infrastructure for Wearable Computing Using Conductive Fabric and Its Evaluation,” 26th IEEE International Conference on Distributed Computing Systems Workshops (ICDCSW’06), Lisboa, Portugal, 2006, pp. 65-65. [CrossRef]
- A. Noda and H. Shinoda, “Inter-IC for Wearables (I2We): Power and Data Transfer Over Double-Sided Conductive Textile,” in IEEE Transactions on Biomedical Circuits and Systems, vol. 13, no. 1, pp. 80-90, Feb. 2019. [CrossRef]
- Ya Zhu, Akihito Noda, Masahiro Fujiwara, Yasutoshi Makino, Hiroyuki Shinoda, Fast half-duplex communication on e-textile based wearable networks, IEICE Communications Express, 2020, Volume 9, Issue 9, Pages 426-432. [CrossRef]
- Chételat, O.; Rapin, M.; Bonnal, B.; Fivaz, A.; Wacker, J.; Sporrer, B. Remotely Powered Two-Wire Cooperative Sensors for Biopotential Imaging Wearables. Sensors 2022, 22, 8219. [Google Scholar] [CrossRef] [PubMed]
- IEC 60601-1; Medical Electrical Equipment—Part 1 : General Requirements for Basic Safety and Essential Performance. IEC: Geneva, Switzerland, 2020.
- Chételat, O. Synchronization and Communication Bus for Biopotential and Bioimpedance Measurement Systems. EP Patent 2567657 B1, 13 March 2013.
- Chételat, O.; Correvon, M. Measurement Device for Measuring Bio-Impedance and/or a Bio-Potential of a Human or Animal Body. US Patent 2015/0173677 B2, 25 June 2015.
- Rapin, M.; Proença, M.; Braun, F.; Meier, C.; Sola, J.; Ferrario, D.; Grossenbacher, O.; Porchet, J.-A.; Chételat, O. Cooperative dry-electrode sensors for multi-lead biopotential and bioimpedance monitoring. Physiol. Meas. 2015, 36, 767–783. [Google Scholar] [CrossRef] [PubMed]
- Rapin, M. A Wearable Sensor Architecture for High-Quality Measurement of Multilead ECG and Frequency-Multiplexed EIT. Ph.D. Thesis, ETH, Zürich, Switzerland, 2018. [Google Scholar] [CrossRef]
- Chételat, O.; Solà, J. Floating front-end amplifier and one-wire measuring device. patent US 8427181 B2, Sep. 16, 2009.
- Chételat, O.; Gentsch, R.; Krauss, J.; Luprano, J. Getting rid of the wires and connectors in physiological monitoring. [CrossRef]
- Chételat, O.; Bonnal, B.; Fivaz, A. Remotely Powered Cooperative Sensor Device. US Patent 2021/0169543 A1, 10 June 2021.
- Rocha, B.M. , Filos D., Mendes L., Serbes G., Ulukaya S., Kahya Y.P., Jakovljevic N., Turukalo T.L., Vogiatzis I.M., Perantoni E., Kaimakamis E., Natsiavas P., Oliveira A., Jácome C., Marques A., Maglaveras N., Pedro Paiva R., Chouvarda I., de Carvalho P. An open access database for the evaluation of respiratory sound classification algorithms. Physiol Meas. 2019 Mar 22;40(3):035001. [CrossRef] [PubMed]
- Frerichs, I. , Vogt, B., Wacker, J., Paradiso, R., Braun, F., Rapin, M., Caldani, L., Chételat, O., Weiler, N. Multimodal remote chest monitoring system with wearable sensors: a validation study in healthy subjects. Physiol Meas. 2020 Feb 5;41(1):015006. [CrossRef] [PubMed]
- Yilmaz, G. , Rapin, M., Pessoa, D., Rocha, B.M., de Sousa, A.M., Rusconi, R., Carvalho, P., Wacker, J., Paiva, R.P., Chételat, O. A Wearable Stethoscope for Long-Term Ambulatory Respiratory Health Monitoring. Sensors 2020, 20, 5124. [Google Scholar] [CrossRef] [PubMed]
- Lasarow, L. , Vogt, B., Zhao, Z., Balke, L., Weiler, N., Frerichs, I.: Regional lung function measures determined by electrical impedance tomography during repetitive ventilation manoeuvres in patients with COPD. Physiol Meas. 2021, 42, 015008. [Google Scholar] [CrossRef] [PubMed]
- Rocha, B.M. , Pessoa, D., Marques, A., Carvalho, P., Paiva, R.P. Automatic Classification of Adventitious Respiratory Sounds: A (Un)Solved Problem? Sensors 2021, 21, 57. [Google Scholar] [CrossRef] [PubMed]
- Frerichs, I.: EIT for Measurement of Lung Function. In: Electrical Impedance Tomography: Methods, History and Applications, 2nd Edition. Eds.: A. Adler and D. Holder. CRC Press, Taylor & Francis Group, Boca Raton, USA. pp. 171-190, ISBN 978-0-7503-0952-3, 2022. [CrossRef]
- Haris, K., Vogt, B., Strodthoff, C., Pessoa, D., Cheimariotis, G.A., Rocha, B., Petmezas, G.., Weiler, N., Paiva, R.P., de Carvalho, P., Maglaveras, N., Frerichs, I. Identification and analysis of stable breathing periods in electrical impedance tomography recordings. Physiol Meas 42, doi: 10.1088/1361-6579/ac08e5, 2021.
- Frerichs, I., Zhao, Z., Dai, M., Braun, F., Proença, M., Rapin, M., Wacker, J., Lemay, M., Haris, K., Petmezas, G., Cheimariotis, A., Lekka, I., Maglaveras, N., Strodthoff, C., Vogt, B., Lasarow, L., Weiler, N., Pessoa, D., Rocha, B.M., de Carvalho, P., Paiva, R.P., Adler, A. Respiratory image analysis. In: Paiva R.P., de Carvalho P, Kilintzis V. Wearable sensing and intelligent data analysis for respiratory management. Academic Press, Elsevier, London, UK. pp. 169-212, ISBN 978-0-12-823447-1, 2022.
- Frerichs, I., Vogt, B., Weiler, N. Elektrische Impedanztomographie zur Untersuchung der regionalen Lungenfunktion. Atemwegs- und Lungenkrankheiten 47: 401-411, 2021. [CrossRef]
- Frerichs, I., Lasarow, L., Strodthoff, C., Vogt, B., Zhao, Z., Weiler, N. Spatial ventilation inhomogeneity determined by electrical impedance tomography in patients with COPD. Front Physiol 12: 762791, doi: 10.3389/fphys.2021.762791, 2021.
- Pessoa, D., Rocha, B.M., Cheimariotis, G.A., Haris, K., Strodthoff, C., Kaimakamis, E., Maglaveras, N., Frerichs, I., de Carvalho, P., Paiva, R.P. Classification of electrical impedance tomography data using machine learning. IEEE Eng Med Biol Soc 2021: 349-353, doi: 10.1109/EMBC46164.2021.9629961, 2021.
- Paradiso, R. , Caldani L., Textiles and Smart Materials for Wearable Monitoring Systems, In: Paiva R.P., de Carvalho P, Kilintzis V. Wearable sensing and intelligent data analysis for respiratory management. Academic Press, Elsevier, London, UK. pp. 169-212, ISBN 978-0-12-823447-1, 2022.
- Wacker, J. , Bonnal, B., Braun, F., Chételat, O., Ferrario, D., Lemay, M., Rapin, M., Renevey, P., Yilmaz, G., In: Paiva R.P., de Carvalho P, Kilintzis V. Wearable sensing and intelligent data analysis for respiratory management. Academic Press, Elsevier, London, UK. pp. 59-93, ISBN 978-0-12-823447-1, 2022.
Figure 1.
Conventional approach to measuring a bioimpedance . Two current electrodes (in red) are connected with double shielded cables to the central unit where a current source injects a current through the skin. The current flows through the impedance to be measured and is drained by another current electrode driven by the current source Any practical deviation between the two current sources flows through the RL electrode (called the right-leg electrode because it was originally developed for ECG and placed on the right leg). The current is translated across the impedance by a voltage drop measured in the same way as biopotentials (difference The controller driving the voltage source allows the common ground potential to be set equal to the body potential, thus avoiding possible saturation of the electronics due to disturbing currents picked up in the environment and flowing through the skin/electrode impedance of the RL electrode. When the impedance is measured at a given angular frequency , it can be decomposed into a real part and imaginary part: . Furthermore, the current is a cosine wave , and the resistance and reactance are extracted from the voltage with IQ demodulation, i.e., multiplication of the voltage by and by , respectively, followed by low-pass filters.
Figure 1.
Conventional approach to measuring a bioimpedance . Two current electrodes (in red) are connected with double shielded cables to the central unit where a current source injects a current through the skin. The current flows through the impedance to be measured and is drained by another current electrode driven by the current source Any practical deviation between the two current sources flows through the RL electrode (called the right-leg electrode because it was originally developed for ECG and placed on the right leg). The current is translated across the impedance by a voltage drop measured in the same way as biopotentials (difference The controller driving the voltage source allows the common ground potential to be set equal to the body potential, thus avoiding possible saturation of the electronics due to disturbing currents picked up in the environment and flowing through the skin/electrode impedance of the RL electrode. When the impedance is measured at a given angular frequency , it can be decomposed into a real part and imaginary part: . Furthermore, the current is a cosine wave , and the resistance and reactance are extracted from the voltage with IQ demodulation, i.e., multiplication of the voltage by and by , respectively, followed by low-pass filters.
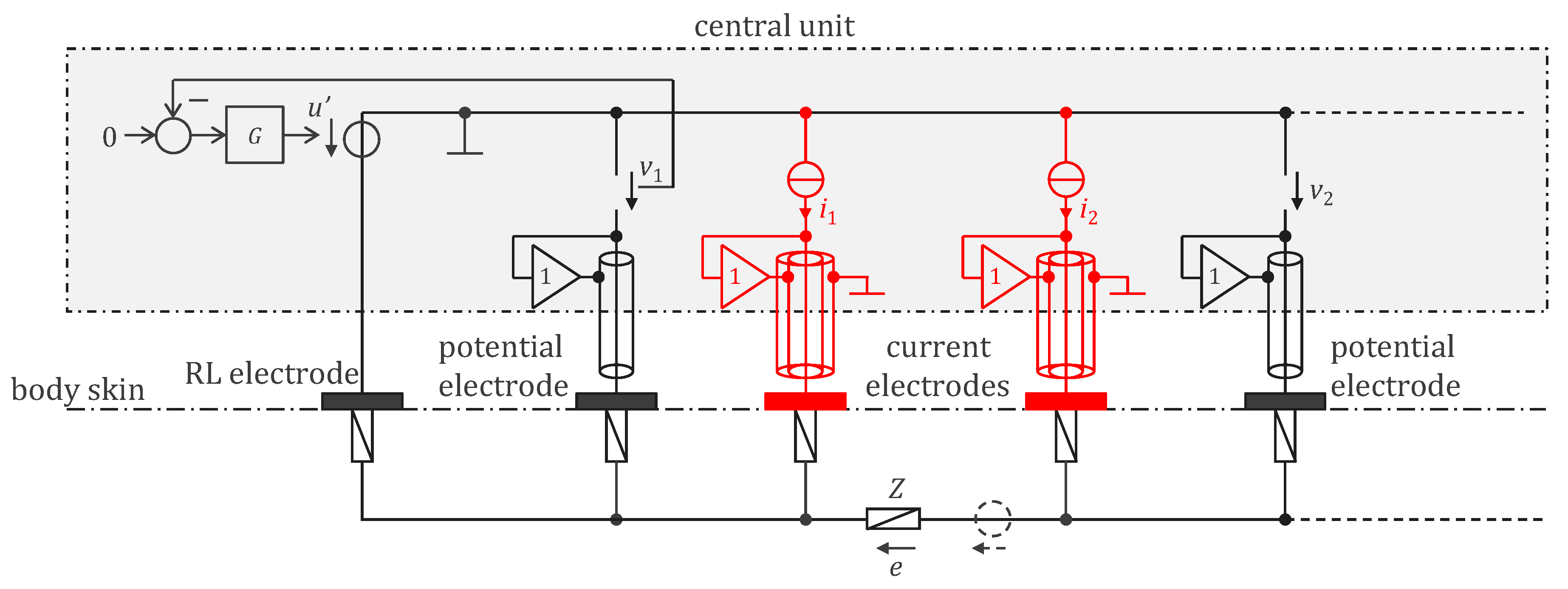
Figure 2.
Cooperative sensors are active electrodes with additional circuitry enabling them to be connected via a parallel bus with up to two wires. The sensors are synchronized by a central unit to which they transmit their measured signals of interest. For devices that do not need to be defibrillator-proof, the bus can be fabricated from conductive textiles. The bottom side of the conductive textile does not need to be insulated because controller of the central unit controls the voltage between the lower textile and the body to nearly zero. The top conductive textile can easily be insulated with an additional layer of fabric (e.g., a regular garment), if the excess leakage currents are electronically monitored. Highly integrated cooperative sensors ASICs can be attached and connected to the fabric, making the assembly seamless while maintaining the usual properties of the fabric (flexibility, stretchability, breathability, and washability). Cooperative sensors can be current electrodes (when the current is different from 0) or potential electrodes (when the current is zero). Symbol legend in Appendix A.
Figure 2.
Cooperative sensors are active electrodes with additional circuitry enabling them to be connected via a parallel bus with up to two wires. The sensors are synchronized by a central unit to which they transmit their measured signals of interest. For devices that do not need to be defibrillator-proof, the bus can be fabricated from conductive textiles. The bottom side of the conductive textile does not need to be insulated because controller of the central unit controls the voltage between the lower textile and the body to nearly zero. The top conductive textile can easily be insulated with an additional layer of fabric (e.g., a regular garment), if the excess leakage currents are electronically monitored. Highly integrated cooperative sensors ASICs can be attached and connected to the fabric, making the assembly seamless while maintaining the usual properties of the fabric (flexibility, stretchability, breathability, and washability). Cooperative sensors can be current electrodes (when the current is different from 0) or potential electrodes (when the current is zero). Symbol legend in Appendix A.
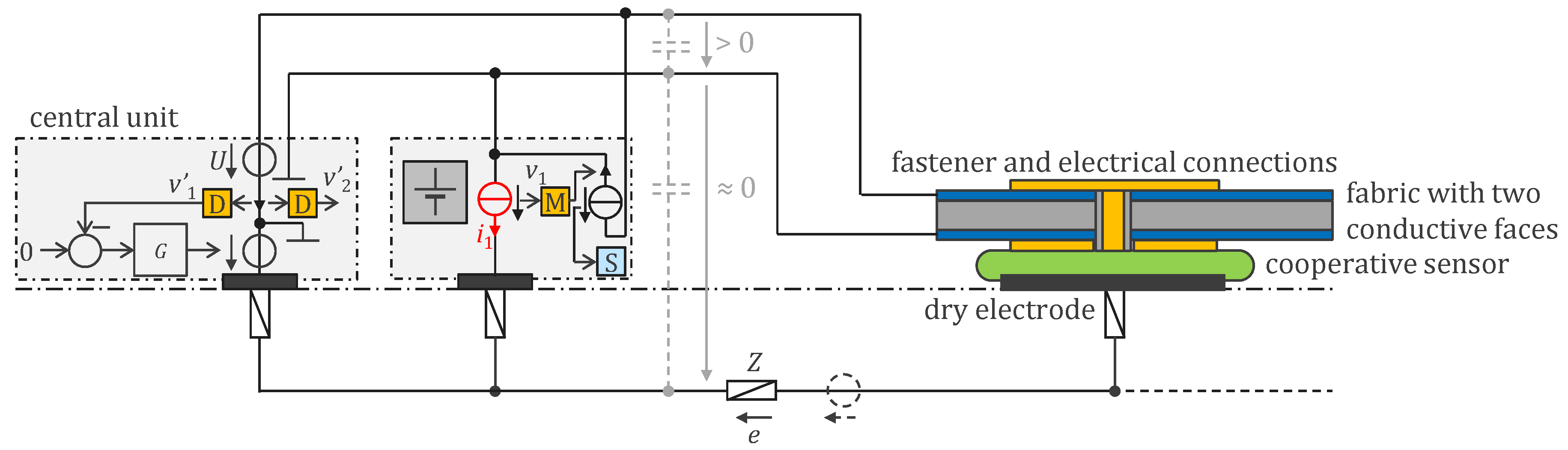
Figure 3.
Connection of 16 sensors around a body part (e.g., chest or limb) for EIT measurements. a) Device with two different types of sensors, one with potential electrode and one with current electrode. b) Device with a single type of sensors with potential or current electrode depending on their current/function (equal to 0 for potential electrode, different to 0 for current electrode). Symbol legend in Appendix A.
Figure 3.
Connection of 16 sensors around a body part (e.g., chest or limb) for EIT measurements. a) Device with two different types of sensors, one with potential electrode and one with current electrode. b) Device with a single type of sensors with potential or current electrode depending on their current/function (equal to 0 for potential electrode, different to 0 for current electrode). Symbol legend in Appendix A.
Figure 4.
A simple bootstrap circuit is used to achieve extremely high impedance (input impedance for potential electrode and output impedance for current electrode) by leveraging the floating battery in each sensor. The parts added for the measurement of bioimpedances are shown in red—the other parts are the same as for biopotentials only [14]. The implementation of the current source (in red) can be simple thanks to the bootstrapping circuit [20] that significantly increases the open-loop impedance and has a rail-to-rail voltage range. The current return for the red current source is from the upper wire only. As the lower wire is used for the measurement of potential, the impedance of the wires does not affect the measurement of bioimpedance. Patients are protected from leakage currents by diodes (not depicted) that prevent stored charge from leaving a sensor while simultaneously enabling recharging of the batteries through the two-wire bus when the system is not being worn. See Appendix A for a symbol legend.
Figure 4.
A simple bootstrap circuit is used to achieve extremely high impedance (input impedance for potential electrode and output impedance for current electrode) by leveraging the floating battery in each sensor. The parts added for the measurement of bioimpedances are shown in red—the other parts are the same as for biopotentials only [14]. The implementation of the current source (in red) can be simple thanks to the bootstrapping circuit [20] that significantly increases the open-loop impedance and has a rail-to-rail voltage range. The current return for the red current source is from the upper wire only. As the lower wire is used for the measurement of potential, the impedance of the wires does not affect the measurement of bioimpedance. Patients are protected from leakage currents by diodes (not depicted) that prevent stored charge from leaving a sensor while simultaneously enabling recharging of the batteries through the two-wire bus when the system is not being worn. See Appendix A for a symbol legend.
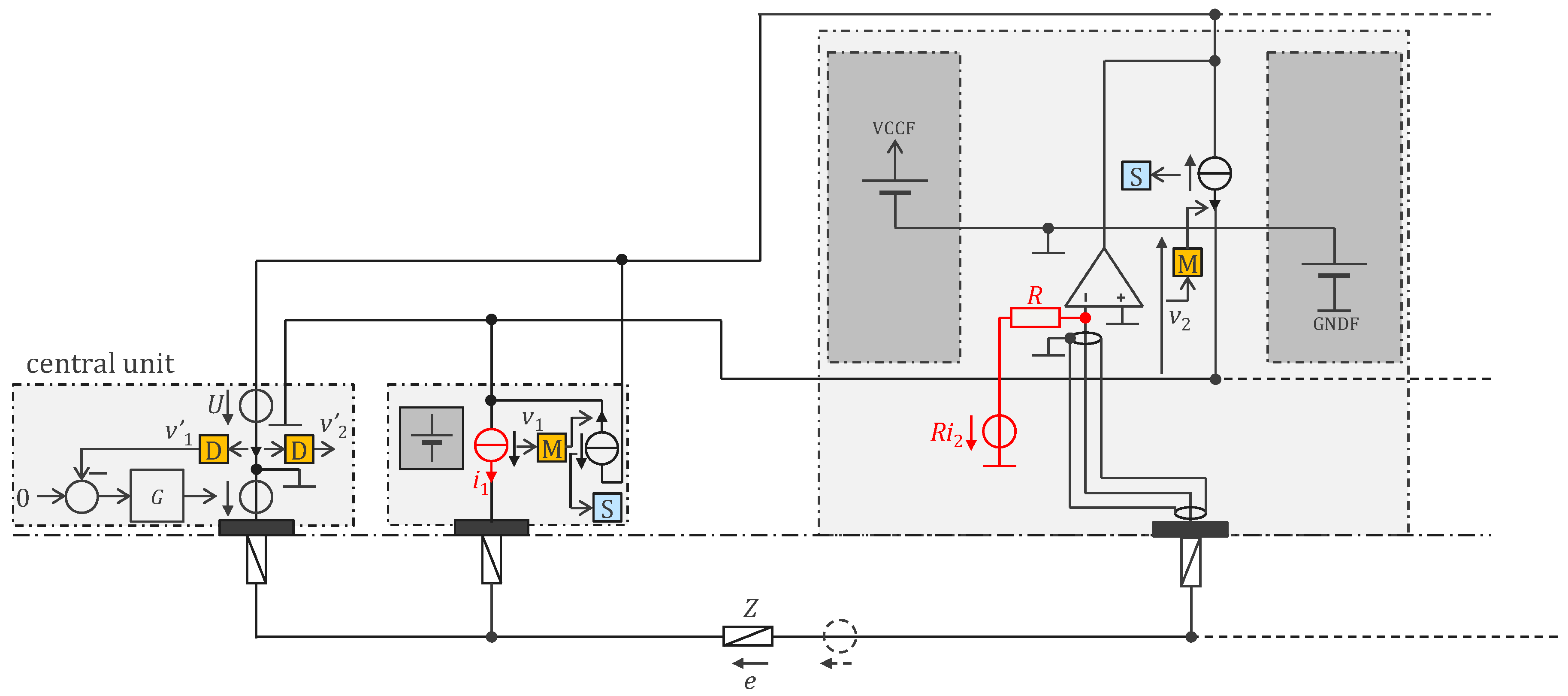
Figure 5.
Remotely powered cooperative sensors for bioimpedance measurement with dry electrodes, with digital communication at 1.28 Mb/s in both directions (full duplex), and remote power supply at 500 Hz. Symbol legend in Appendix A.
Figure 5.
Remotely powered cooperative sensors for bioimpedance measurement with dry electrodes, with digital communication at 1.28 Mb/s in both directions (full duplex), and remote power supply at 500 Hz. Symbol legend in Appendix A.
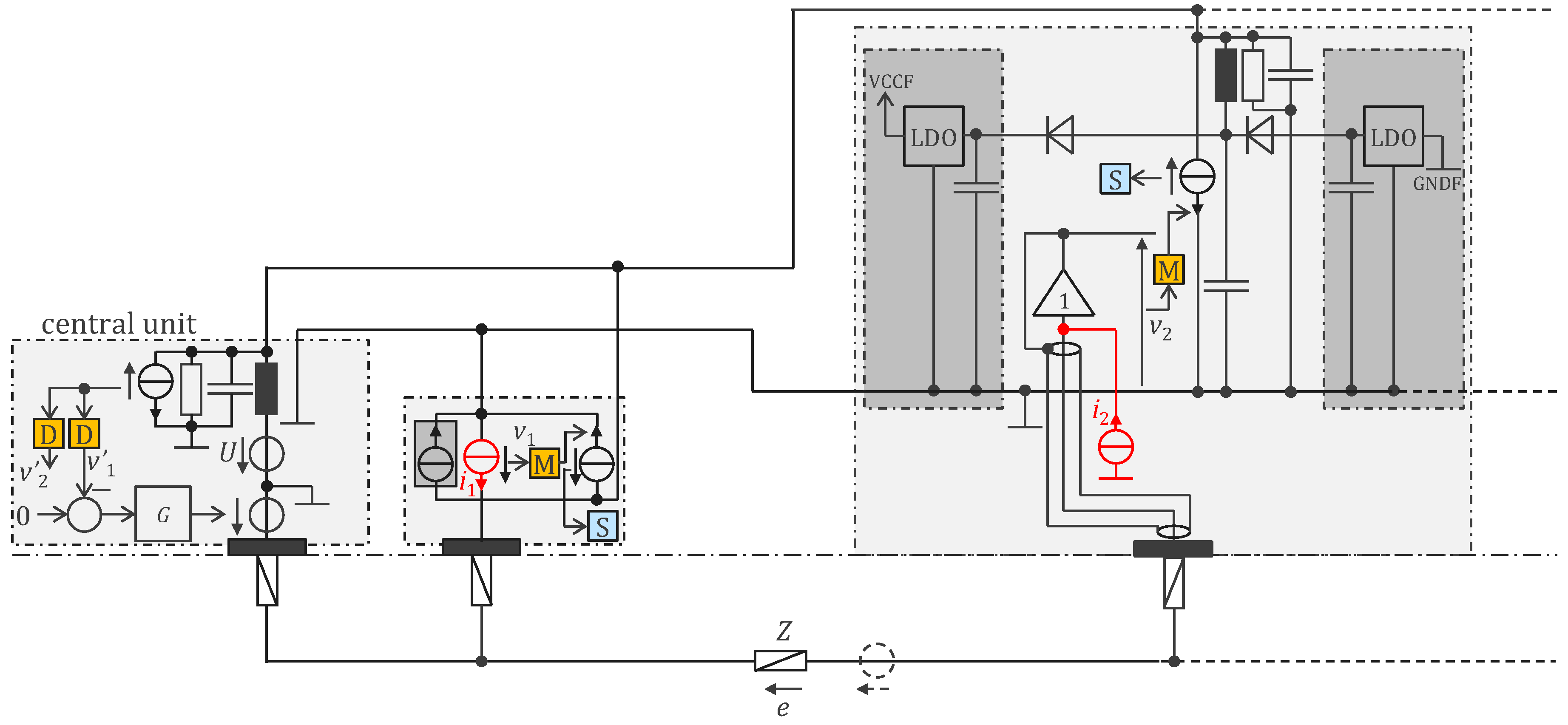
Figure 6.
Remotely powered cooperative sensors for bioimpedance measurement with dry electrodes, with analogue communication at 500 000 samples per second and remote supply voltage at 1 MHz. Left: schematic overview of the central unit circuit; middle: schematic overview of a sensor circuit; right: detailed circuit diagram of a sensor. Symbol legend in Appendix A.
Figure 6.
Remotely powered cooperative sensors for bioimpedance measurement with dry electrodes, with analogue communication at 500 000 samples per second and remote supply voltage at 1 MHz. Left: schematic overview of the central unit circuit; middle: schematic overview of a sensor circuit; right: detailed circuit diagram of a sensor. Symbol legend in Appendix A.
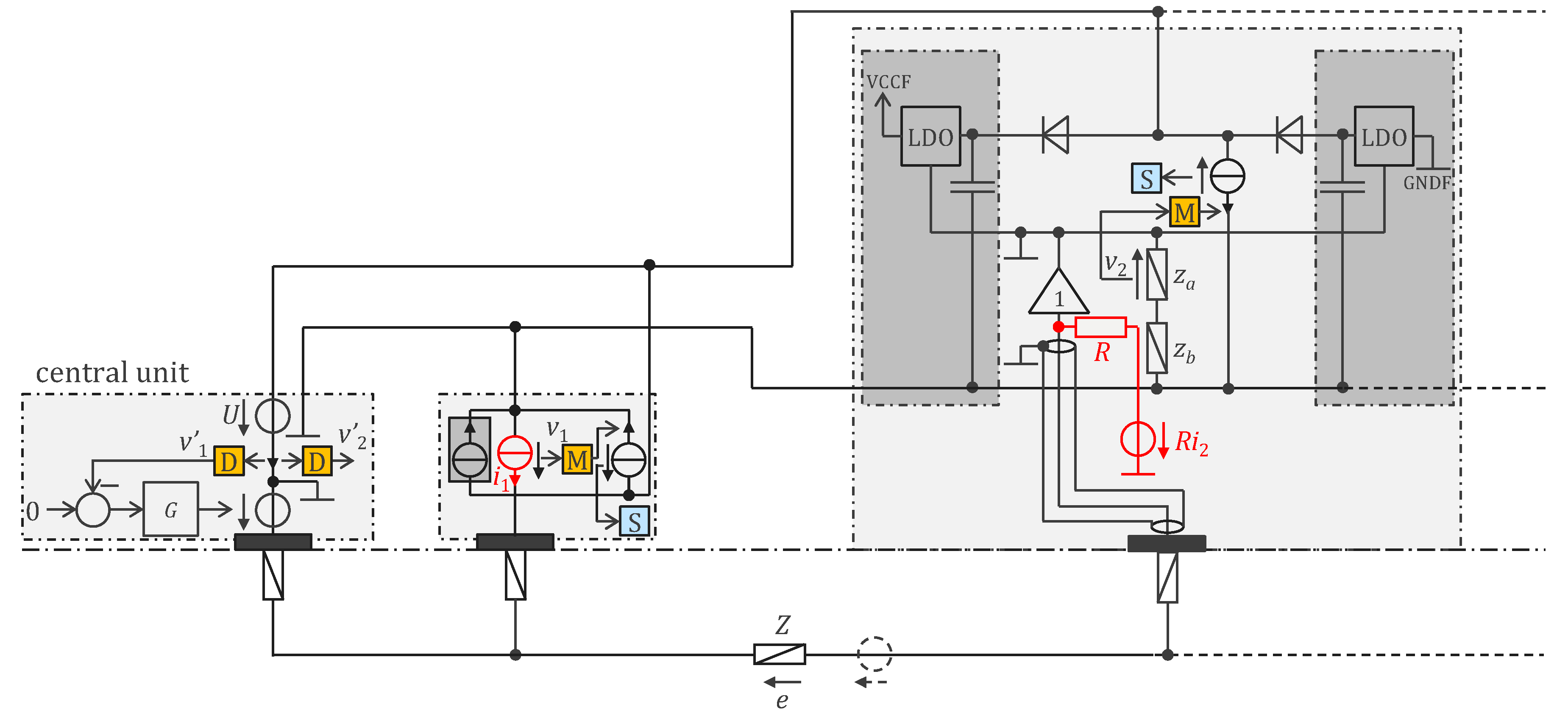
Figure 7.
Supply voltage consisting of a 1 MHz square wave with a sync marker (periodicity break) consisting of an HH period with a Manchester edge (in blue) every 1 s (every 1 000 000 periods of the 1 MHz square wave). The other periods contain a powering period H and a communication period L. If the period is HL, the sensors understand it as a 1, whereas LH is understood as a 0. This upstream digital communication can be used to configure or control the sensors. The sensors harvest energy during subperiod H and one of them (determined by the sensor ID and the position of the period with respect to the synch marker, in red in the figure) transmits an analogue value during subperiod L.
Figure 7.
Supply voltage consisting of a 1 MHz square wave with a sync marker (periodicity break) consisting of an HH period with a Manchester edge (in blue) every 1 s (every 1 000 000 periods of the 1 MHz square wave). The other periods contain a powering period H and a communication period L. If the period is HL, the sensors understand it as a 1, whereas LH is understood as a 0. This upstream digital communication can be used to configure or control the sensors. The sensors harvest energy during subperiod H and one of them (determined by the sensor ID and the position of the period with respect to the synch marker, in red in the figure) transmits an analogue value during subperiod L.
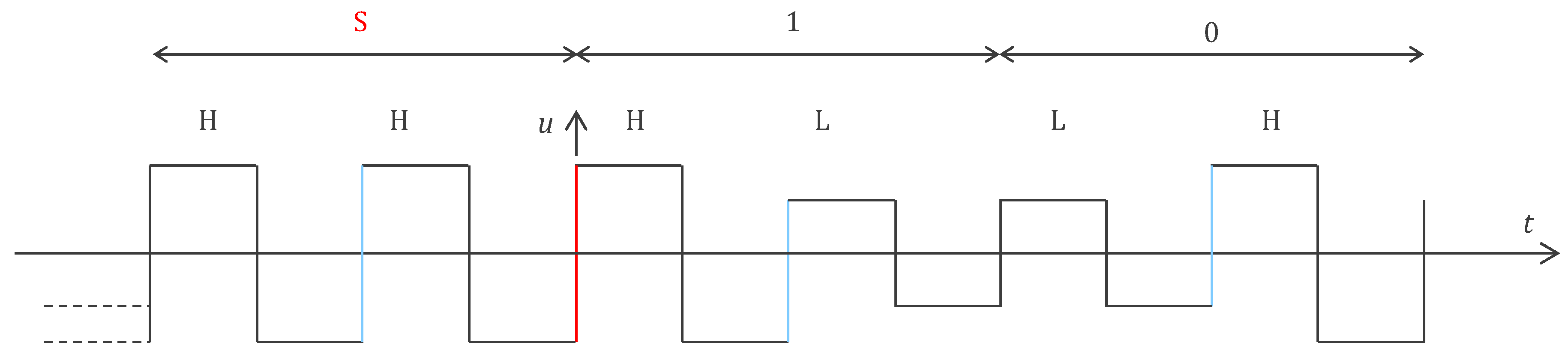
Figure 8.
A possible implementation of the comb filter. Symbol legend in Appendix A.
Figure 8.
A possible implementation of the comb filter. Symbol legend in Appendix A.
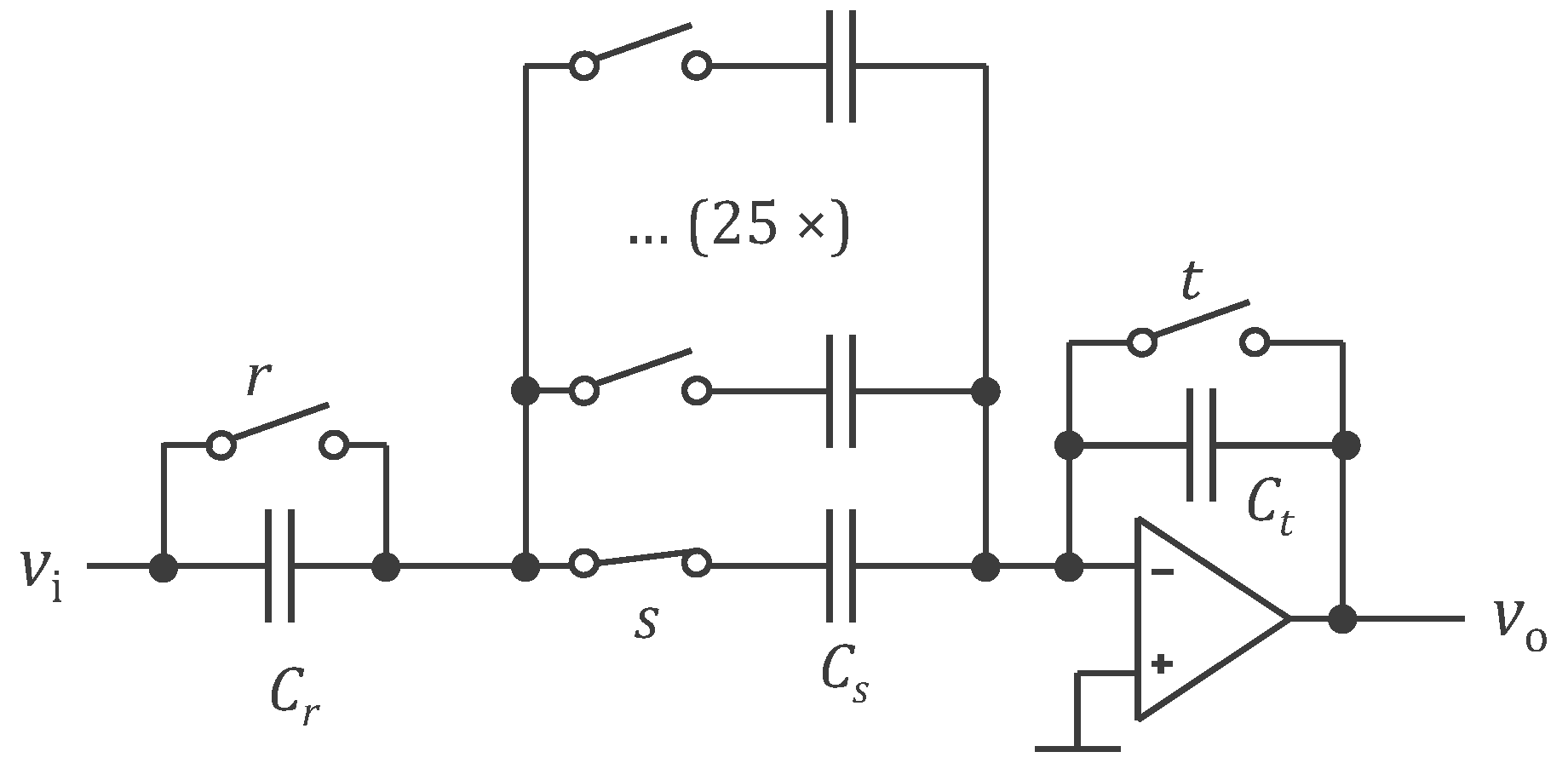
Figure 9.
WELMO vest with embedded EIT chest strap with off-the-shelf components (textile part made by Smartex in the framework of the EU project WELMO). Left: worn vest, middle top: front view of cooperative sensor with stainless steel dry current/potential electrode and stethoscope (center), middle bottom: back view of cooperative sensor with its two connectors to the 2-wire parallel bus, right top: open vest with embedded EIT chest strap with reference and RL textile electrodes ① and cooperative sensors with dry electrode ② and stethoscope ③, right bottom: back view of EIT chest strap showing the 2-wire parallel bus and the attachment washers.
Figure 9.
WELMO vest with embedded EIT chest strap with off-the-shelf components (textile part made by Smartex in the framework of the EU project WELMO). Left: worn vest, middle top: front view of cooperative sensor with stainless steel dry current/potential electrode and stethoscope (center), middle bottom: back view of cooperative sensor with its two connectors to the 2-wire parallel bus, right top: open vest with embedded EIT chest strap with reference and RL textile electrodes ① and cooperative sensors with dry electrode ② and stethoscope ③, right bottom: back view of EIT chest strap showing the 2-wire parallel bus and the attachment washers.
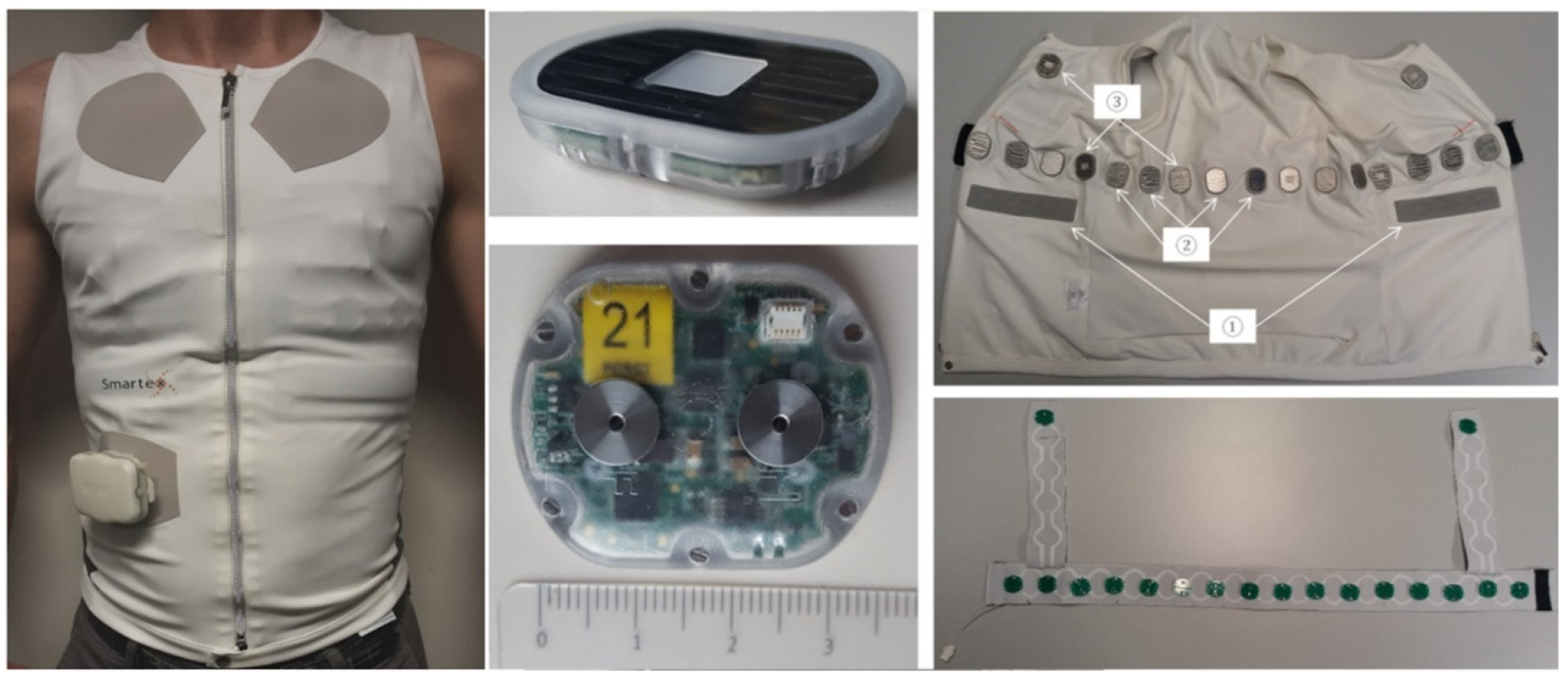
Figure 10.
A possible implementation of the principles shown in Figure 5 (as prototyped in the device shown in Figure 9). Note that the safety protection circuit is not pictured for simplicity. Symbol legend in Appendix A.
Figure 10.
A possible implementation of the principles shown in Figure 5 (as prototyped in the device shown in Figure 9). Note that the safety protection circuit is not pictured for simplicity. Symbol legend in Appendix A.
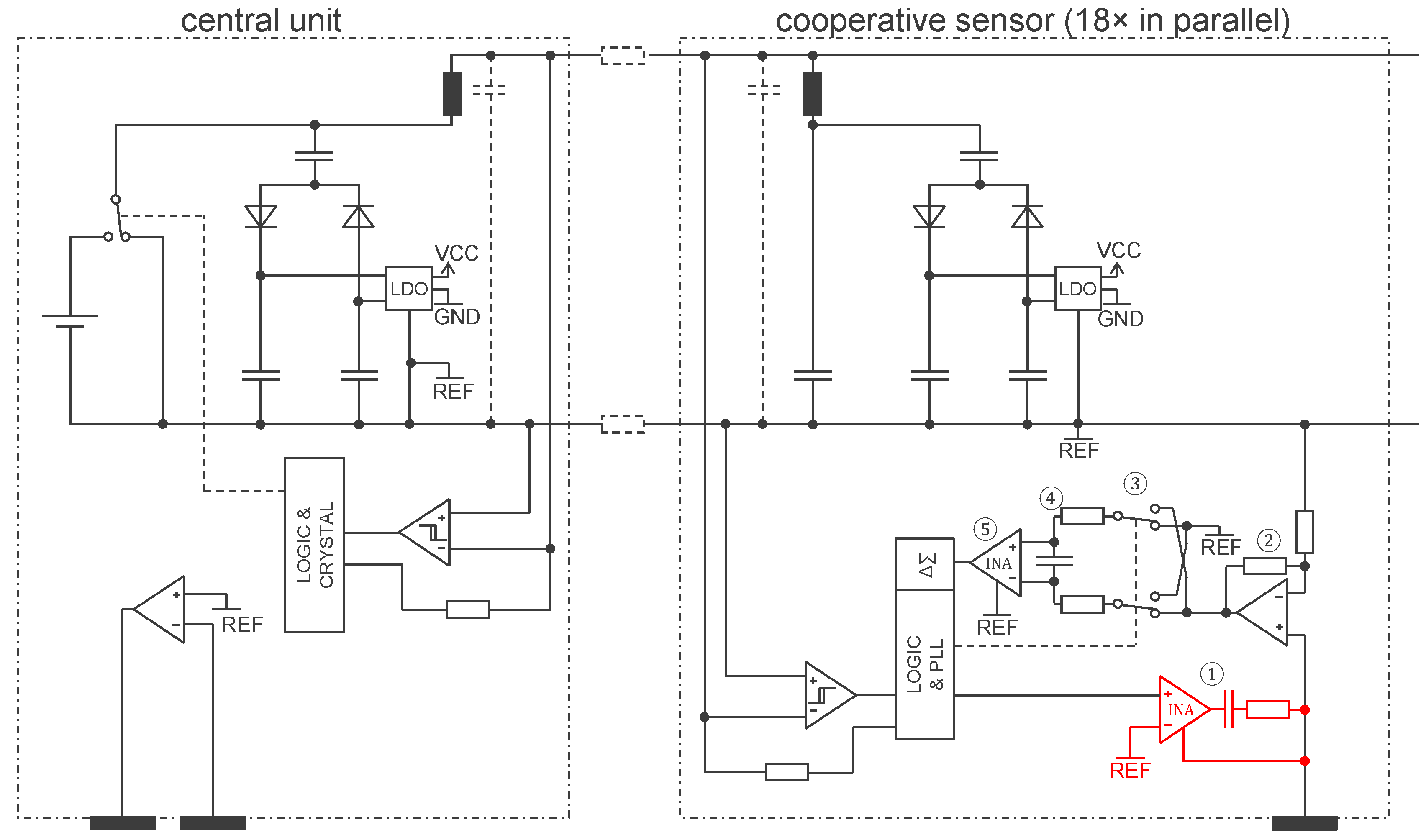
Figure 11.
Configurations and (top and bottom) where the EIT device (left and in black) is connected to two resistors (in red) to provide information corresponding to different resistance matrices , , … (right) for the optimization function allowing to compute by optimization the calibration function . Symbol legend in Appendix A.
Figure 11.
Configurations and (top and bottom) where the EIT device (left and in black) is connected to two resistors (in red) to provide information corresponding to different resistance matrices , , … (right) for the optimization function allowing to compute by optimization the calibration function . Symbol legend in Appendix A.
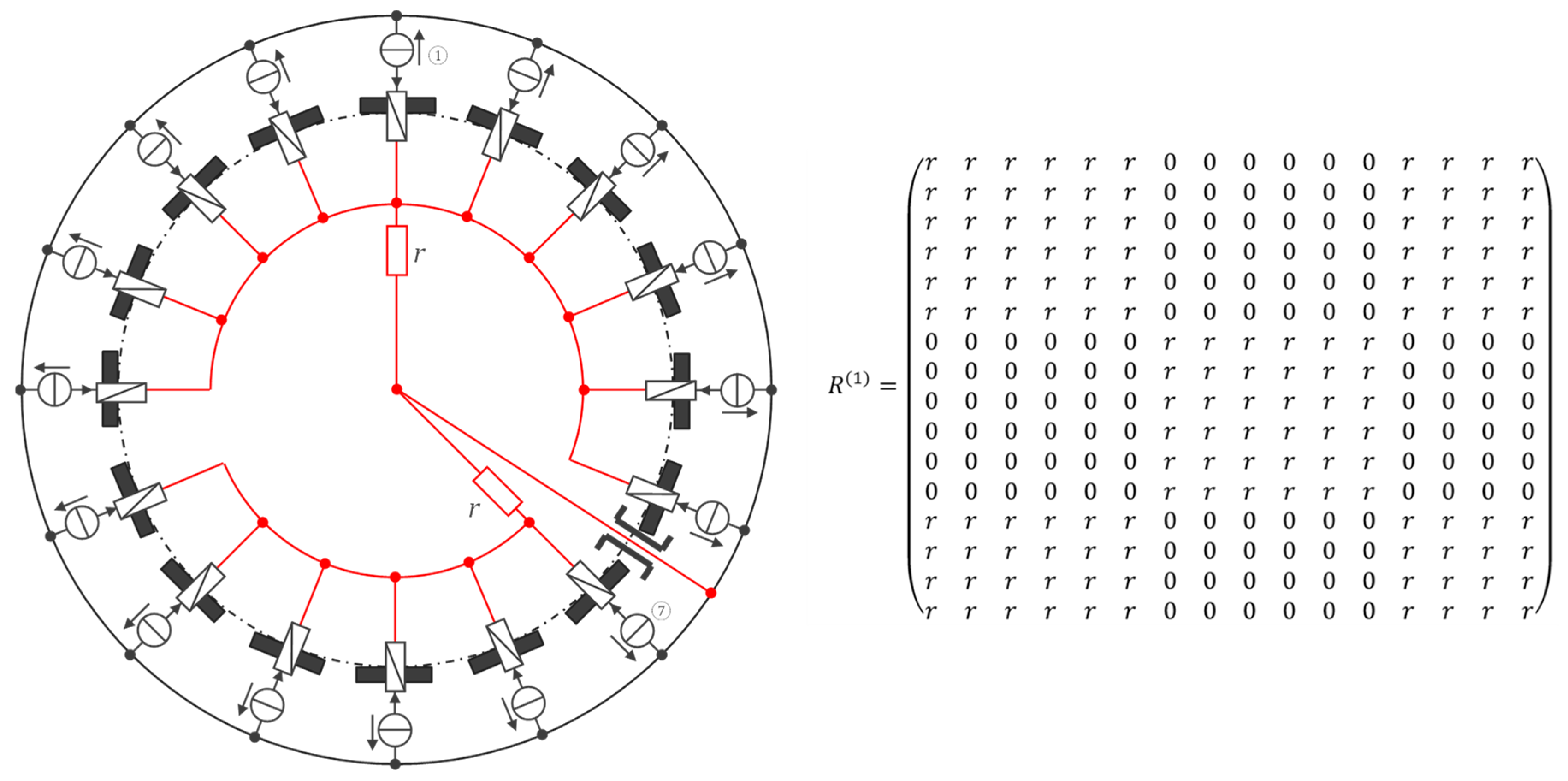
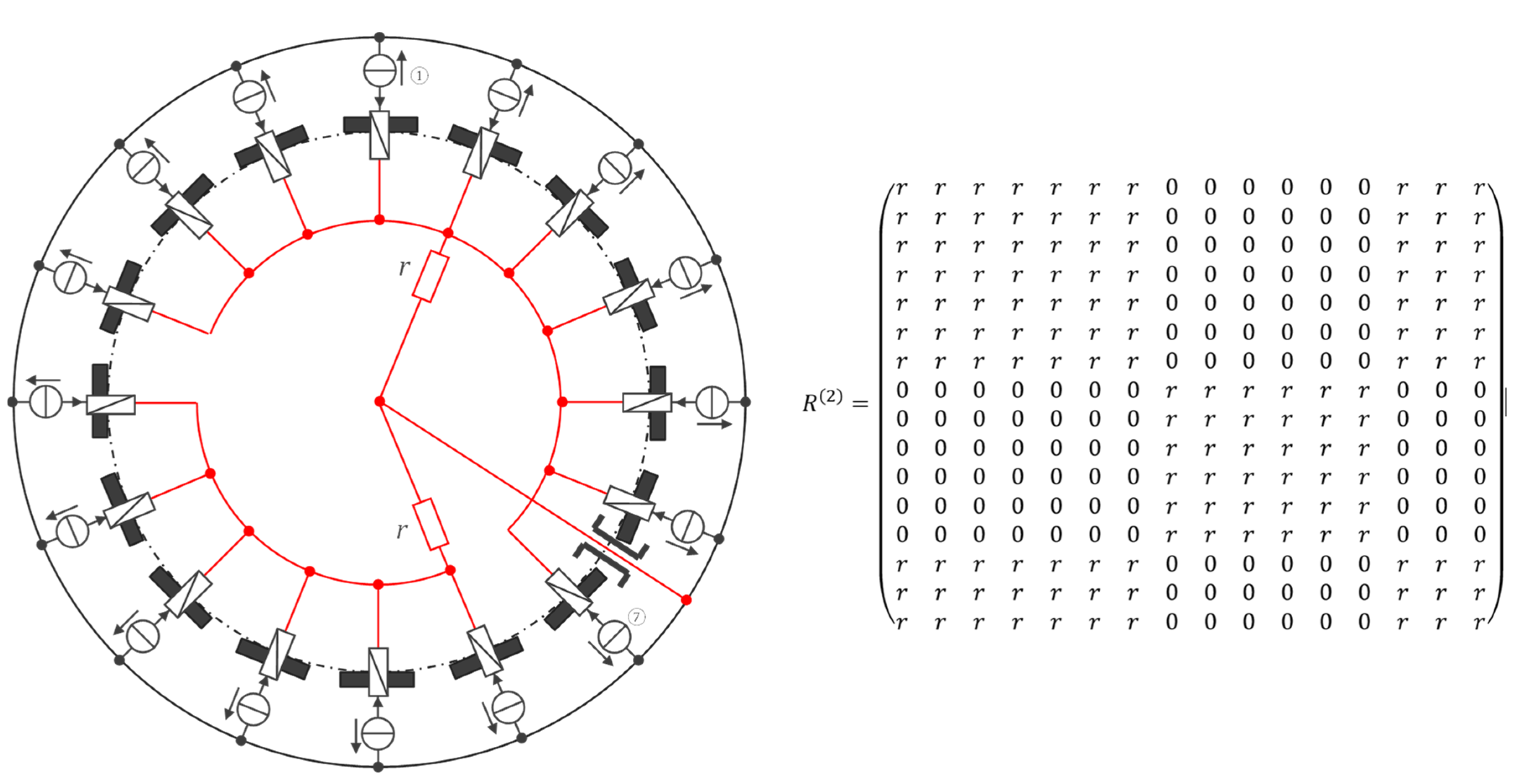
Figure 12.
Errors (top) and , i.e., after calibration (bottom) for configuration . Comparable results are obtained for the other configurations to .
Figure 12.
Errors (top) and , i.e., after calibration (bottom) for configuration . Comparable results are obtained for the other configurations to .
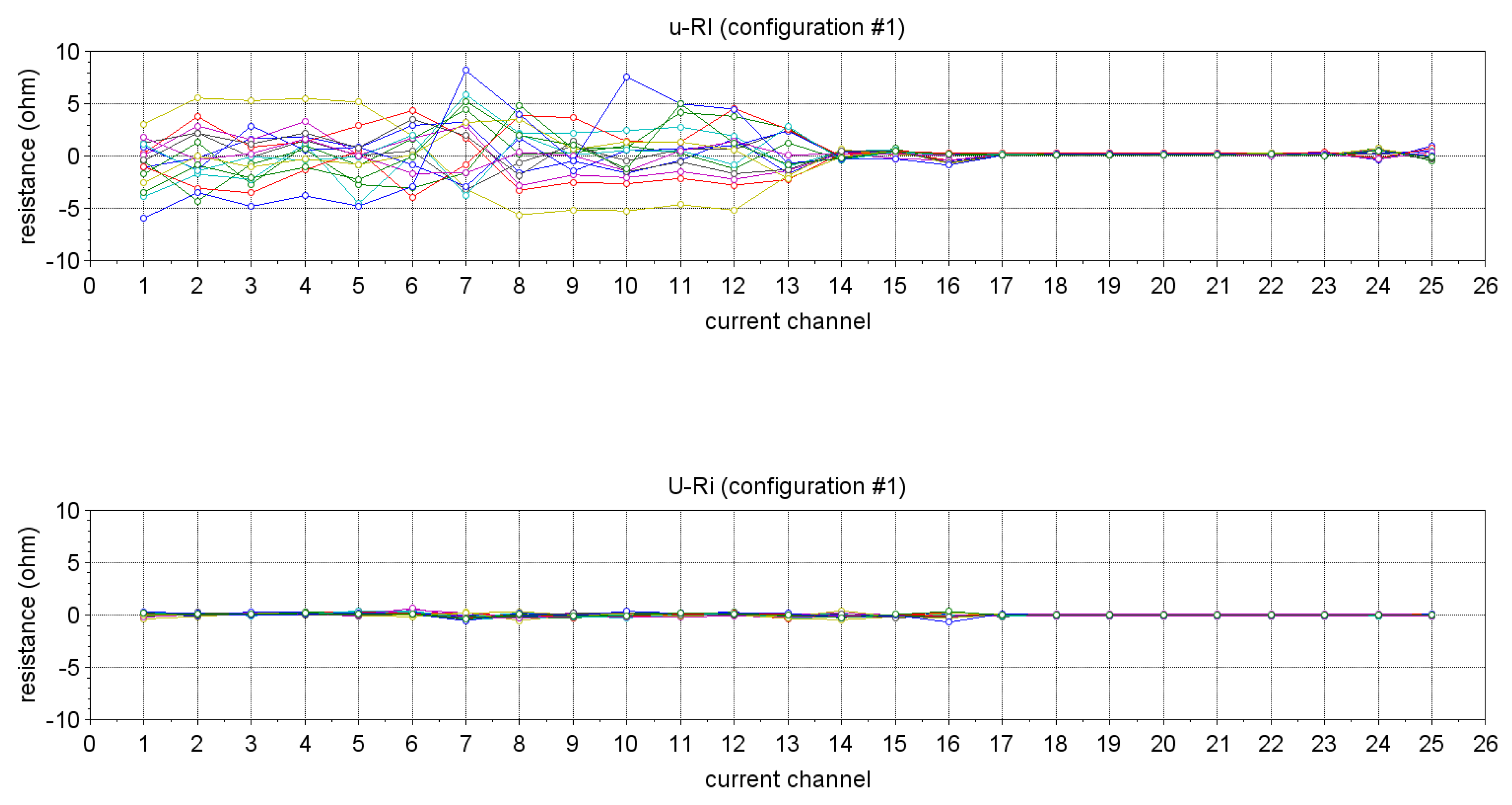
Figure 13.
ASIC block diagram of bioimpedance cooperative sensor. The circuit blocks that interface with the 2-wire sensor bus are marked in red and the signal processing circuits in green. Symbol legend in Appendix A.
Figure 13.
ASIC block diagram of bioimpedance cooperative sensor. The circuit blocks that interface with the 2-wire sensor bus are marked in red and the signal processing circuits in green. Symbol legend in Appendix A.
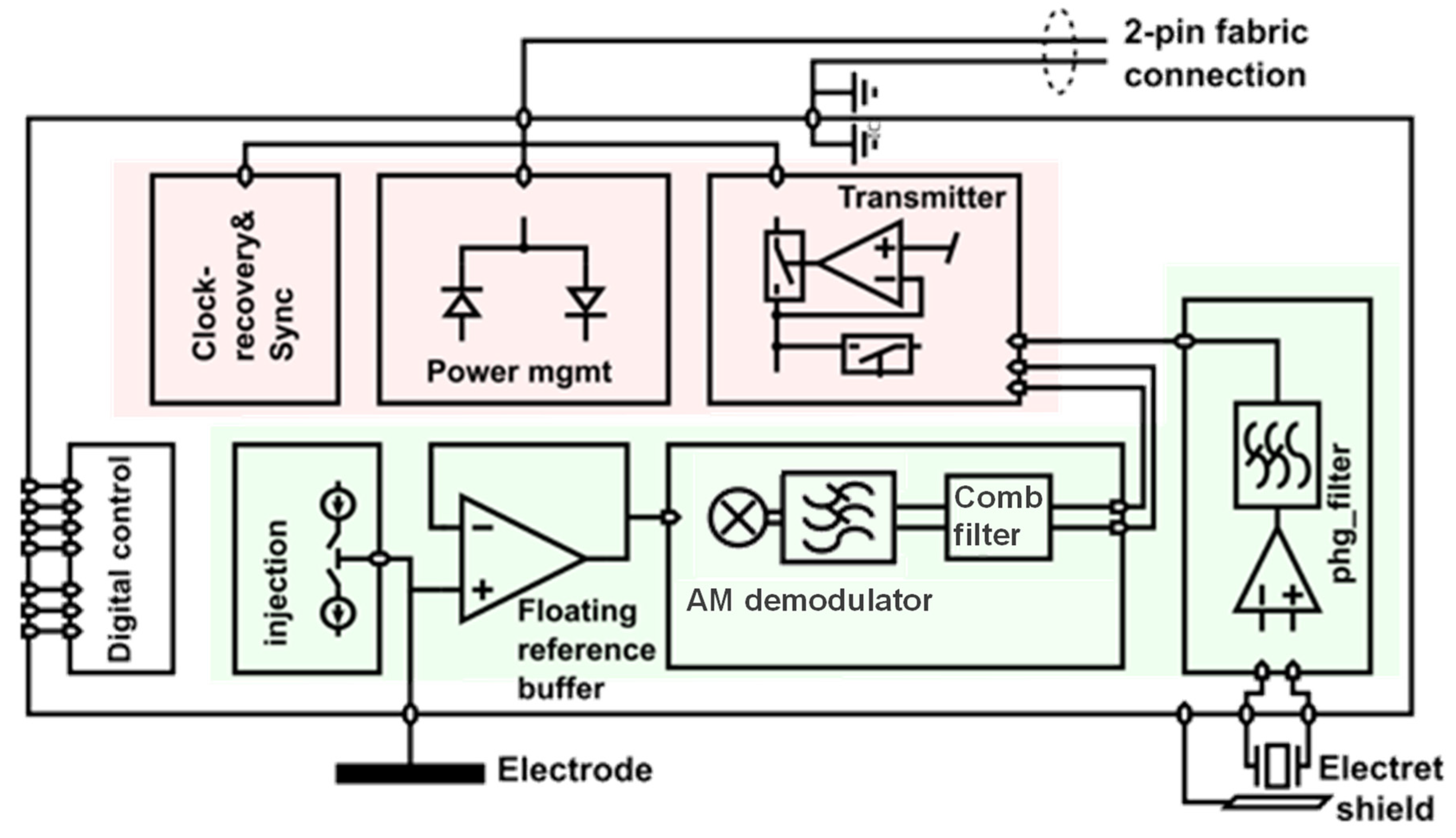
Figure 14.
Implementation of the circuit for the central unit based on the approach shown in Figure 6. Symbol legend in Appendix A.
Figure 14.
Implementation of the circuit for the central unit based on the approach shown in Figure 6. Symbol legend in Appendix A.
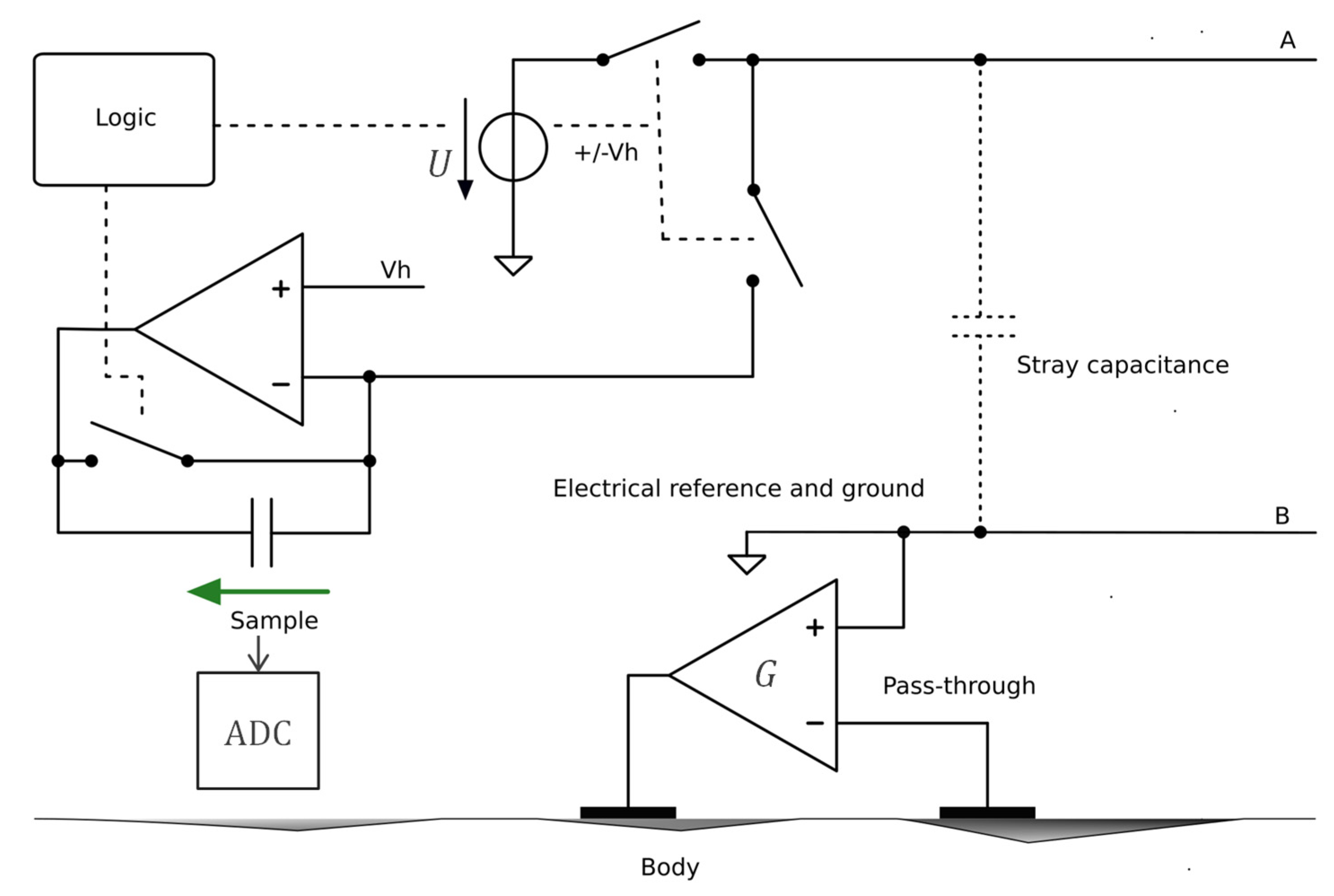
Figure 15.
Cut view of the integration of a sensor realized with an ASIC. ①: PCB with mounted ASIC and finger spring contacts; ②: Bottom part of the housing, with overmolded skin electrode ③; ④: Top part of the housing, with overmolded wire contacts ⑤ (only one is shown); ⑥: Electrically conductive track on a slightly compressible textile ⑦; ⑧: Clamp pressing the sensor onto the textile; ⑨: Reinforcement ring on belt textile ⑩. The hight of the ASIC sensor (without clamp and without textile) is 4.7 mm.
Figure 15.
Cut view of the integration of a sensor realized with an ASIC. ①: PCB with mounted ASIC and finger spring contacts; ②: Bottom part of the housing, with overmolded skin electrode ③; ④: Top part of the housing, with overmolded wire contacts ⑤ (only one is shown); ⑥: Electrically conductive track on a slightly compressible textile ⑦; ⑧: Clamp pressing the sensor onto the textile; ⑨: Reinforcement ring on belt textile ⑩. The hight of the ASIC sensor (without clamp and without textile) is 4.7 mm.
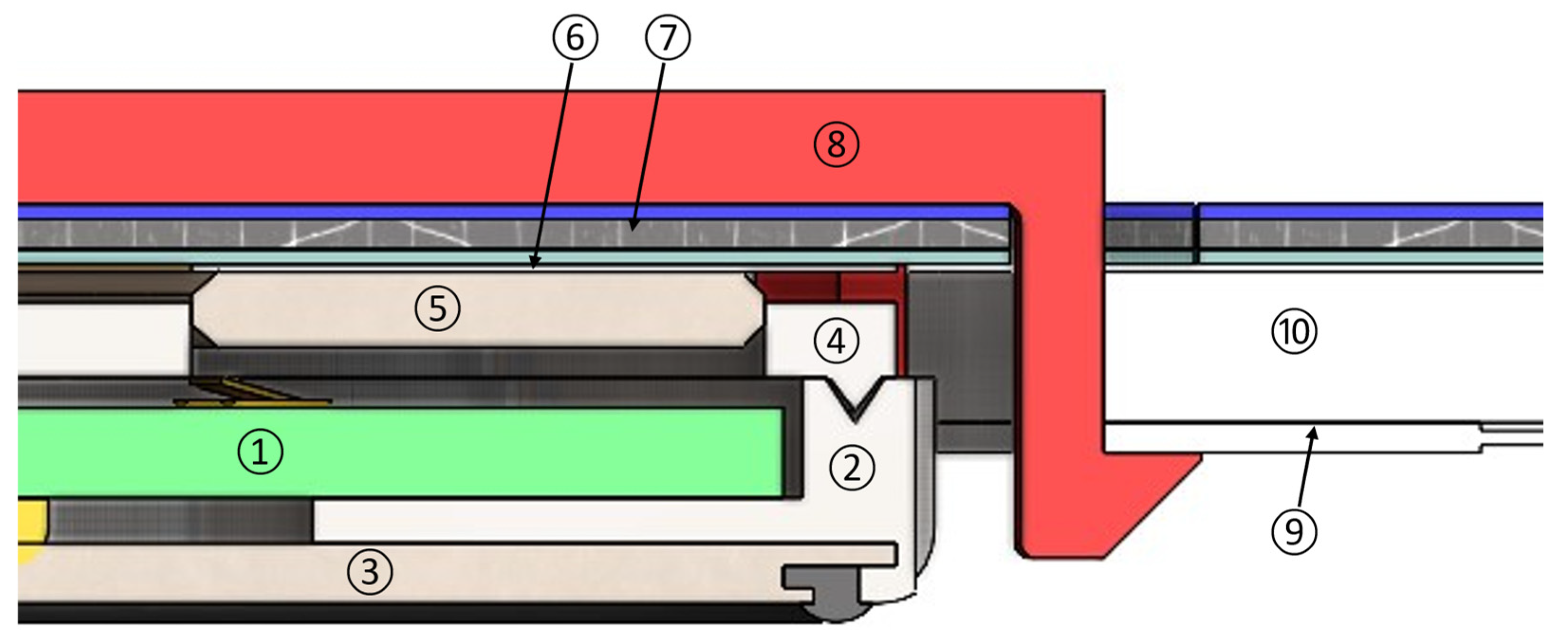
Figure 16.
a) Real setup and b) functional diagram of setup for first verifications of the concept including four sensors, i.e., ASIC (left), central unit (right), and resistance to measure (centre).
Figure 16.
a) Real setup and b) functional diagram of setup for first verifications of the concept including four sensors, i.e., ASIC (left), central unit (right), and resistance to measure (centre).
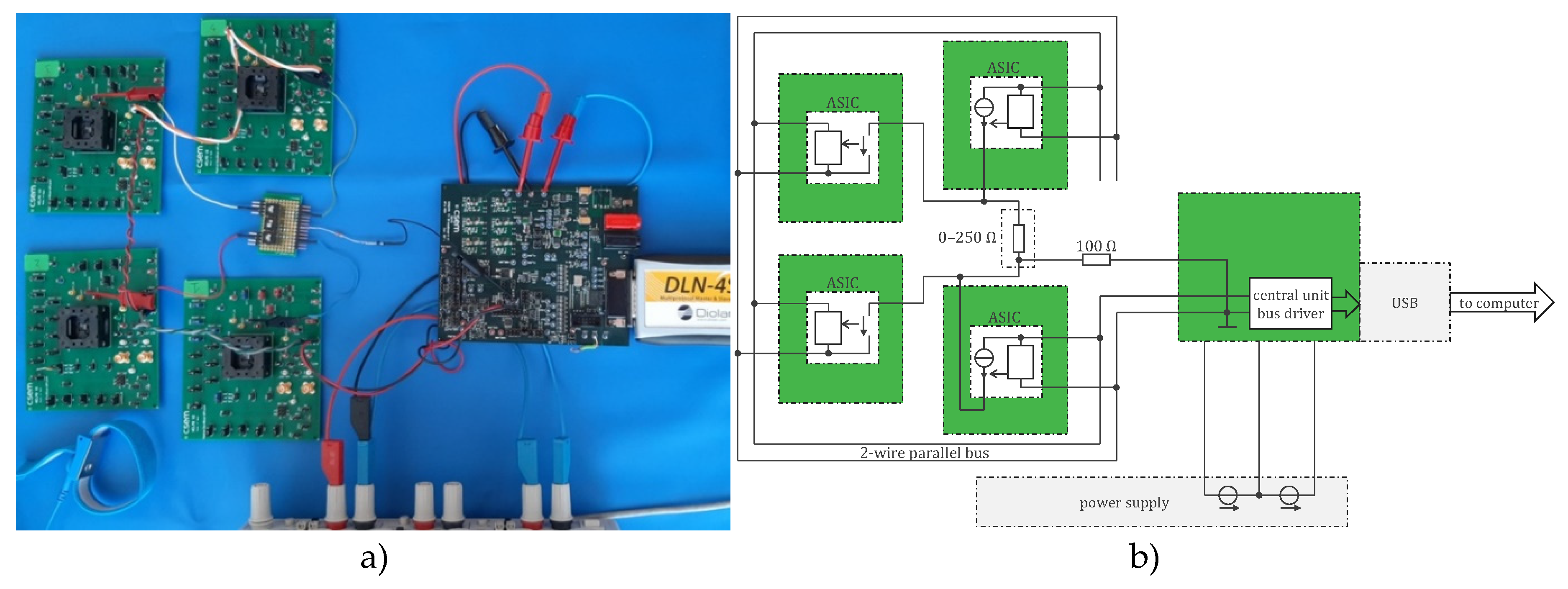
Figure 17.
Setup to measure the input impedance of the ASIC frontend amplifier.
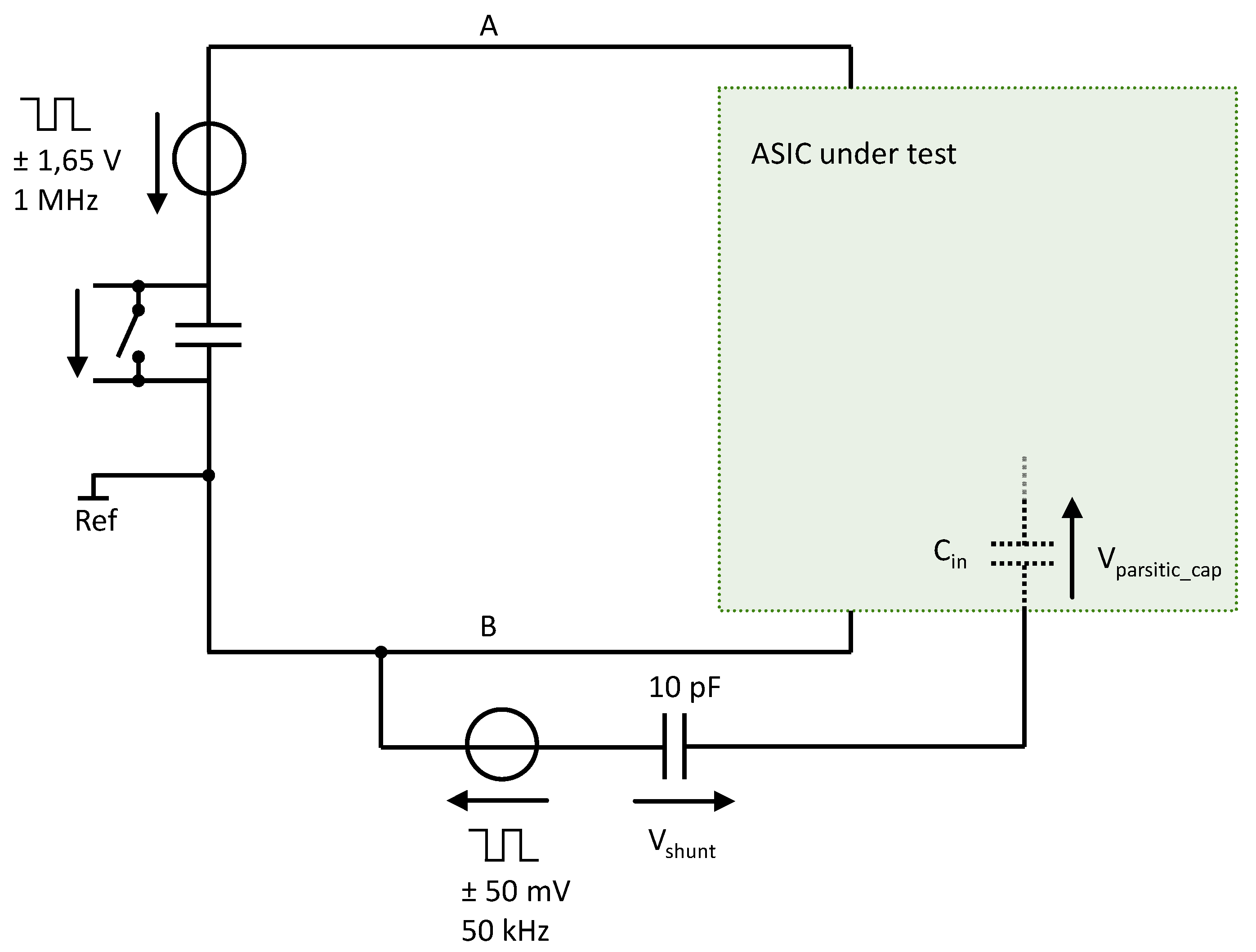
Figure 18.
Top row: ASIC sensor harness worn (left) and open (right), exposing the sensors and the electrodes on the sensors and two textile electrodes. Middle row: ASIC sensor clamped to a 3D knit on two electrically conductive tracks, realized as conductive tapes (black). Bottom row: the belt textile with the reinforcement ring (seen as a slight bump in the photo) added on top of the conductive tapes.
Figure 18.
Top row: ASIC sensor harness worn (left) and open (right), exposing the sensors and the electrodes on the sensors and two textile electrodes. Middle row: ASIC sensor clamped to a 3D knit on two electrically conductive tracks, realized as conductive tapes (black). Bottom row: the belt textile with the reinforcement ring (seen as a slight bump in the photo) added on top of the conductive tapes.


Table 1.
Comparison to existing work (the main contribution of the paper is highlighted in grey).
| Technique/Features | Ref | Comment |
|---|---|---|
| Conventional star arrangement | Not suitable for wearables with many electrodes | |
| Passive electrodes, shielded cables | [1] | Widespread |
| Active electrodes, multi-wire cables | [2,3] | Well-known, but not often used |
| Parallel bus arrangement | Scalable (connector size independent of nb. of electr.) | |
| Bus with more than 2 wires | [4] | Not easily flexible, stretchable, breathable, washable |
| Two-wire bus (cooperative sensors) | §2 | Simplest connection |
| Locally powered Bootstrapping Separate potential/impedance wires |
§2.1 §2.2 §2.2 |
Easy to comply with safety (medical standards) Suitable for dry electrodes, easy current source Wire impedance is not part of measured bioimpedance |
| Remotely powered (biopotential only) | [14] | |
| Remotely powered (+bioimpedance) | §3/§4 | Sensors can be miniaturized |
| No monitoring of leakage currents No bootstrapping No separate potential/impedance wires |
§3.1/ §4.1 |
Requires reliable waterproof double insulation Not ideal for dry electrodes, complex current source Measured bioimpedance include wire impedance |
| Monitorable leakage currents Bootstrapping Separate potential/impedance wires |
§3.2/ §4.2 |
Suitably flexible, stretchable, breathable, washable Suitable for dry electrodes, high-end current source Wire impedance is not part of measured bioimpedance |
Table 2.
Definition of current channels. See also Figure 3b.
Table 2.
Definition of current channels. See also Figure 3b.
| Channel | Injected current (100 µA rms, 40 kHz square wave) |
|---|---|
| 1 | ① → ⑦ |
| 2 | ② → ⑧ |
| … | … |
| 10 | ⑩ → ⑯ |
| 11 | ⑪ → ① |
| … | … |
| 16 | ⑯ → ⑥ |
| 17–25 | unused (yet) |
Table 3.
Measured performances (full scale FS = [−255, 255] Ω).
|
R (Ω) ±0.02% |
Measurement (Ω) |
Linearity(% FS) | Noise in 0–2.5 Hz (mΩ rms) |
|---|---|---|---|
| 250 | 249.95 | −0.02 | 32.49 |
| 200 | 200.75 | 0.30 | 37.38 |
| 150 | 149.54 | −0.18 | 39.79 |
| 100 | 99.32 | −0.27 | 33.19 |
| 50 | 49.97 | −0.01 | 32.95 |
| 0 | 0.47 | 0.19 | 30.55 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



