
Submitted:
31 July 2024
Posted:
31 July 2024
You are already at the latest version
Abstract
In this study, we obtained results for the computation of eigen-pairs, singular value decomposition, pseudo-inverse, and the least square problem for elliptic quaternion matrices. Moreover, we established algorithms based on these results and provided illustrative numerical experiments to substantiate the accuracy of our conclusions. In the experiments, it was observed that the p-value in the algebra of elliptic quaternions and elliptic numbers directly affects the performance of the problem under consideration. Selecting the optimal p-value for problem-solving and the elliptic behavior of many physical systems make this number system advantageous in applied sciences.
Keywords:
Elliptic quaternion matrix
; Optimal p-value
; Eigen-pairs
; Singular value decomposition
; Pseudo-inverse
; Least square solution
MSC: 11R52; 15A60; 15A18
1. Introduction
The singular value decomposition is a foundational aspect of matrix theory. In contrast to eigenvalue decomposition, which is limited to certain square matrices, singular value decomposition is applied to matrices of any size. Numerous results related to matrices, e.g., pseudo-inverses of matrices, solutions for least squares problems, and invariant norms under unitary transformations, can be derived from the principles of singular value decomposition. As a result, singular value decomposition is pivotal in the computation and analysis of matrices. In addition to its importance in the theoretical field, it appears in the solution of many problems in the applied fields, e.g., image processing, signal processing, principal component analysis, data compression, machine learning, deep learning, and computational mathematics, etc. Many researchers studied in these applied fields examine singular value decomposition methods. For example, Dian et al. presented a novel hyperspectral image and multispectral image fusion method based on the subspace representation and convolutional neural network denoiser. They obtained the subspaces via singular value decomposition of a high-resolution hyperspectral image [1]. Hashemipour et al. proposed a new lossy data compression framework centred on optimal singular value decomposition for big data compression [2]. Wang and Zhu focused on the implementation of data reduction algorithms such as SVD and principal component analysis in machine learning [3].
There is a generalization that includes three classes of 2-dimensional hypercomplex numbers [4]. The following is the definition of these numbers, known as generalized complex numbers:
where and Generalized Segre quaternions are generalized complex numbers extended to 4 dimensions. Generalized Segre quaternions are defined as follows:
where . The multiplication rules for and k units are given in the table below:

Table 1.
Multiplication rules of and k units.
| i | j | k | |
|---|---|---|---|
| i | p | k | |
| j | k | 1 | i |
| k | i | p |
Based on the value of p, generalized complex numbers and Segre quaternions are classified as follows [5]:
Every number system in Table 2 has various scientific and technological applications. Problems in non-Euclidean geometries are solved by hyperbolic complex numbers and hyperbolic quaternions [6]. In domains like robotic control and spatial mechanics, parabolic complex (dual) numbers and parabolic quaternions are employed [7]. On the other hand, as numerous physical systems demonstrate elliptical behavior, the practical applications of elliptic complex numbers and elliptic quaternions in applied science are noteworthy. For example, Ozdemir defined elliptic quaternions (non-commutative) and generated an elliptical rotation matrix for the motion of a point on an ellipse through some angle about a vector using those quaternions [8]. Dundar et al. studied elliptical harmonic motion, which is the superposition of two simple harmonic motions in perpendicular directions with the same angular frequency and phase difference of by using elliptic complex numbers [9]. Derin and Gungor proposed the generalization of gravity, including the Proca-type and gravitomagnetic monopole by means of elliptic biquaternions [10]. Catoni et al. introduced algebraic properties and the differential conditions of elliptic quaternionic systems [5]. Additionally, Catoni et al. studied the constant curvature spaces associated with the geometry generated by elliptic quaternions. They formulated geodesic equations within the context of Riemann geometry [11]. Gua et al. defined the elliptic quaternionic canonical transform and investigated Parseval’s theorem with the help of this transform [12]. Yuan et al. obtained the Hermitian solutions of the elliptic quaternion matrix equation [13]. Tosun and Kosal characterized the existence of the solution to Sylvester s-conjugate elliptic quaternion matrix equations. They obtained the solution explicitly using a real representation of an elliptic quaternion matrix [14]. Gai and Huang developed a new convolutional neural network with elliptic quaternion values. They conducted extensive experiments on colour image classification and colour image denoising to evaluate the performance of the proposed convolutional neural network [15]. Guo et al. studied the problem of solutions to Maxwell’s equations of elliptic quaternions using a real representation of elliptic quaternion matrices [16]. Atali et al. obtained the elliptic quaternionic least-squares solution with the minimum norm of the elliptic quaternion matrix equation . Furthermore, leveraging the insights derived from their theories, they developed a novel color image restoration model known as the elliptical quaternionic least squares restoration filter [17].
As observed, the elliptic quaternions and their matrices find numerous practical applications in various branches of applied sciences. Thus, further study of the theoretical properties and numerical computations of elliptic quaternions and their matrices is becoming increasingly necessary. In this regard, we have derived outcomes concerning the computation of eigen-pairs, singular value decomposition, pseudo-inverse, and least square solutions with the minimum norm for elliptic quaternion matrices. Additionally, algorithms have been formulated based on these results, accompanied by illustrative numerical experiments to validate our findings’ precision empirically.
Within the context of this paper, the following notations will be employed. Let , , , and denote the sets of real numbers, complex numbers, elliptic complex numbers, and elliptic quaternions, respectively. , , , and denote the set of all matrices on , , and , respectively. We will also denote elliptic complex numbers as EC numbers and elliptic quaternions as EQs for short. The notation to be used to represent numbers throughout the study is given in the table below.
Moreover, all computations in this study are performed using the MATLAB 2024a (64bit) on an Intel(R) Xeon(R) CPU E5-1650 v4 @3.60GHz (12 CPUs)/16GB (DDR3) RAM computer.
2. Preliminaries
An EC number is denoted by where and . The conjugate and norm of are defined as respectively [18]. The multiplication of EC numbers and is defined as
An EC matrix is denoted as where , , and , . The conjugate, transpose, conjugate transpose and Frobenius norm of in are defined by , and , respectively. The multiplication of the EC matrices and is defined as
An EQ is denoted as where , , , , , and [5,18]. An EQ is denoted in the forms:
where
and
are an EC numbers and Clearly, , and As a result, and are disjoint idempotent units.
The multiplication of the two EQs and is defined by
The conjugate and norm of the EQ are defined by and respectively.
An EQ matrix is represented
where
and
are EC matrices and [14,17]. The multiplication of the two EQ matrices and is defined by
The conjugate, transpose, conjugate transpose, and Frobenius norm of EQ matrix are defined by , , and
3. Eigenvalues and Eigenvectors, Singular Value Decomposition, Pseudo-Inverse, and Least Squares Problem for EQ Matrices
3.1. EC Matrices
The lemmas that will be given in this subsection and will be used in the proofs of theorems regarding EQ matrices have been obtained through the following isomorphisms and their inverses:
and
where I represents the complex unit () [4].
Lemma 1.
A polynomial function of degree N with EC number coefficients presented by
has exactly N zeros in the set of EC numbers.
Lemma 2.
Let . An EC matrix is nonsingular if and only if the complex matrix are nonsingular. If are nonsingular, then
Lemma 3.
Let . Then
Lemma 4.
Let the eigenvalues of an complex matrix be denoted by , and let the corresponding eigenvectors be represented by Then, the eigenvalues of the EC matrix are given by
and the corresponding eigenvectors are given by
The converse of this lemma is also true.
Lemma 5.
Let be an EC matrix. The pseudo-inverse of , denoted by , is given by
where is the pseudo-inverse of the complex matrix .
Lemma 6.
Let . Suppose that the singular value decomposition of the complex matrix is given by Then, the singular value decomposition of the EC matrix is
where Σ is a real matrix. The converse of this statement is also true.
Lemma 7.
Let . Suppose that In this case, the pseudo-inverse of EC matrix is given by
Lemma 8.
Let and . Suppose that In this case, the least squares solution with the minimum norm of the EC matrix equation is given by
3.2. EQ Matrices
Let . Since and are disjoint idempotent units here, the mathematical properties associated with EQ matrices are closely related to EC matrices . In this subsection, results related to eigen-pairs, singular value decomposition, pseudo-inverse, and least squares solution with the minimum norm for EQ matrices have been derived from this fact.
Definition 1.
A monic polynomial of degree N with EQ variables is expressed as
where are EQ coefficients.
Theorem 1.
A polynomial function with degree N has exactly zeros in the set of EQs.
Proof.
The polynomial can be written in the form
where and are polynomials of degree N with EC number coefficients and values. Since these polynomials have at most N zeros each, the EQ-valued polynomial has at most roots.
Theorem 2.
An EQ matrix is nonsingular if and only if the EC matrices are nonsingular. If are nonsingular, then
Proof.
Let’s assume that is nonsingular and is inverse of . In this case,
holds. By this fact,
are obtained. Then, we get
Conversely, let’s assume that are nonsingular EC matrices. In this case,
holds. Consequently, is nonsingular and
is valid.
Theorem 3.
Let . Suppose that and are eigenvalues of EC matrices and corresponding to the eigenvectors and respectively. Then is an eigenvalue of corresponding to the eigenvector and its converse is also true.
Proof.
Suppose and are eigen-pairs of EC matrices and , respectively. Then,
Thus, is an eigen-pairs of . Conversely, assume that is an eigen-pairs of . Then, we get and
which implies
Corollary 1.
Let . Since EC matrices and have at most n eigenvalues, the EQ matrix has at most eigenvalues.
Theorem 4.
Let . Suppose that singular value decompositions of and are and , respectively. Then, the singular value decomposition of EQ matrix is given by
where and such that and are unitary matrices.
Proof.
Let the singular value decompositions of and be and , respectively. Then, the singular value decomposition of is as follows:
where
and is hyperbolic matrix. ( is real matrix if and only if ) □
Corollary 2.
Let . Then
Corollary 3.
Let be the singular value decomposition of an EQ matrix in the form Then, the pseudo-inverse of is where and
Theorem 5.
The least squares solution with the minimum norm of the EQ matrix equation is
where and .
Proof.
The least squares solution with the minimum norm of the EQ matrix equation is . Then we get and
From Eq. (), we have
Hence, if and only if
If then and similarly, where Therefore, the least squares solution of the equation is
which completes the proof.
3.2.1. Algorithms
The following algorithms delineate the computational procedures for determining eigen-pairs, singular value decomposition, pseudo-inverse computation, and the derivation of least squares solution with the minimum norm for EQ matrices.
| Algorithm 1:Eigen-pairs of |
|
| Algorithm 2:Singular Value Decomposition of |
|
| Algorithm 3:Pseudo-inverse of |
|
| Algorithm 4:Least Squares Solution with the Minimum Norm of |
|
3.2.2. Numerical Examples
Example 1.
Given the EQ matrices and as follows:
and
Let’s find the least squares solution with the minimum norm by using Algorithms 2, 3, and 4 for . By the Algorithm 2, we get the singular value decomposition of EQ matrix as follows:
and
By Algorithms 2 and 3, the least squares solution and minimum norm are found as
and
respectively.
Example 2.
Let’s define the dimensions of the EQ matrices and given by:
Then, the errors (or minimum norms) corresponding p and m-values are shown in Figure 1. Here, Algorithm 4 was executed for each m-value, iterating over each p-value in the range with a step size of . The minimal errors were identified and highlighted on the surface plot with red dots.
Also, we compare our new proposed Algorithm 4 and the Algorithm documented by Atali et al. in [17], focusing on CPU time and error metrics. The experimental results of this comparison are depicted in Figure 2 (CPU times) and Figure 3 (Errors).
and
4. Conclusion
In this research, we derived outcomes for determining eigen-pairs, performing singular value decomposition, obtaining pseudo-inverse, and finding the least squares solution with the minimum norm for EQ matrices. Additionally, we developed algorithms grounded on these outcomes and presented illustrative numerical instances to validate our results.
This number system is more useful in the applied sciences since it allows one to select the ideal p-value suited for the type of problem in EQs, considering the elliptical behaviour of many physical systems. As a result, the use of EQs in today’s critical technology fields - information security, data analytics, simulation technologies, robotics, signal processing, image processing, artificial intelligence, and machine learning - will effectively solve many problems related to time, memory, and performance.
Author Contributions
Conceptualization, H. H. K.; Formal analysis, E. K.; H. H. K., E. K. and B. Ç. wrote the main manuscript text. All authors reviewed the manuscript. All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
The data used to support the findings of this study are available from the corresponding author upon request.
Acknowledgments
This paper was supported by the Scientific and Technological Research Institution of TÜRKİYE (TUBITAK-1002-a-121F289). We thank TÜBİTAK for their support.
Conflicts of Interest
The authors declare no competing interests.
References
- Dian, R.; Li, S.; Kang, X. Regularizing hyperspectral and multispectral image fusion by CNN denoiser. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32(3), 1124–1135. [Google Scholar] [CrossRef] [PubMed]
- Hashemipour, N. et al. Optimal Singular value decomposition based big data compression approach in smart grids. IEEE Trans. Ind. Appl. 2021, 32(3), 1124–1135. [Google Scholar]
- Wang, Y. C.; Zhu, L. Research and implementation of SVD in machine learning. 2017 IEEE/ACIS 16th International Conference on Computer and Information Science 2017, 471–475.
- Harkin, A. A.; Harkin, J. B. Geometry of generalized complex numbers. Math. Mag. 2004, 77(2), 118–129. [Google Scholar] [CrossRef]
- Catoni, F.; Cannata, R.; Zampetti, P. An introduction to commutative quaternions. Adv. Appl. Clifford Algebr. 2006, 16, 1–28. [Google Scholar] [CrossRef]
- Yaglom, I. M. A Simple non-Euclidean geometry and its physical basis; Springer-Verlag, New York; 1979.
- Condurache, D.; Burlacu, A. Dual tensors based solutions for rigid body motion parameterization. Mech Mach Theory 2014, 74, 390–412. [Google Scholar] [CrossRef]
- Özdemir, M. An alternative approach to elliptical motion. Adv. Appl. Clifford Algebras 2016, 26, 279–304. [Google Scholar] [CrossRef]
- Dundar, F. S.; Ersoy, S.; Pereira, N. T. S. Bobillier formula for the elliptical harmonic motion. An. St. Univ. Ovidius Constanta 2018, 26, 103–110. [Google Scholar] [CrossRef]
- Derin, Z.; Gungor, M. A. Elliptic biquaternionic equations of gravitoelectromagnetism. Math. Methods Appl. Sci. 2022, 45(8), 4231–4243. [Google Scholar] [CrossRef]
- Catoni, F.; Cannata, R.; Zampetti, P. An introduction to constant curvature spaces in the commutative (Segre) quaternion geometry. Adv. Appl. Clifford Algebr. 2006, 16(2), 85–101. [Google Scholar] [CrossRef]
- Guo, L.; Zhu, M.; Ge, X. Reduced biquaternion canonical transform, convolution and correlation Signal Processing 2011, 91(8), 2147–2153.
- Yuan, S.F.; Tian, Y.; Li, M. Z. On Hermitian solutions of the reduced biquaternion matrix equation (AXB,CXD)=(E,G). Linear Multilinear Algebra, 2020, 68(7), 1355–1373.
- Tosun, M.; Kosal, H. H. An algorithm for solving the Sylvester s-conjugate elliptic quaternion matrix equations. In Š. Hošková-Mayerová, C. Flaut, F. Maturo (Eds.), Algorithms as a Basis of Modern Applied Mathematics, Springer International Publishing, 2021; pp. 279–292.
- Gai, S.; Huang, X. Reduced biquaternion convolutional neural network for color image processing, IEEE Trans. Circuits Syst. Video Technol., 2022, 32(3), 1061–1075.
- Guo, Z. ; Zhang, D;. Vasiliev, V. I.; Jiang, T. Algebraic techniques for Maxwell’s equations in commutative quaternionic electromagnetics, The European Physical Journal Plus, 2022, 137(5), 577–1075.
- Atali, G.; Kosal, H. H.; Pekyaman, M. A new image restoration model associated with special elliptic quaternionic least-squares solutions based on LabVIEW, J. Comput. Appl. Math., 2023, 425, 115071. [Google Scholar] [CrossRef]
- Catoni, F, et al., The mathematics of Minkowski space–time: with an introduction to commutative hypercomplex numbers, Birkhäuser, Basel; 2008.
Figure 1.
Errors corresponding p and m-values.
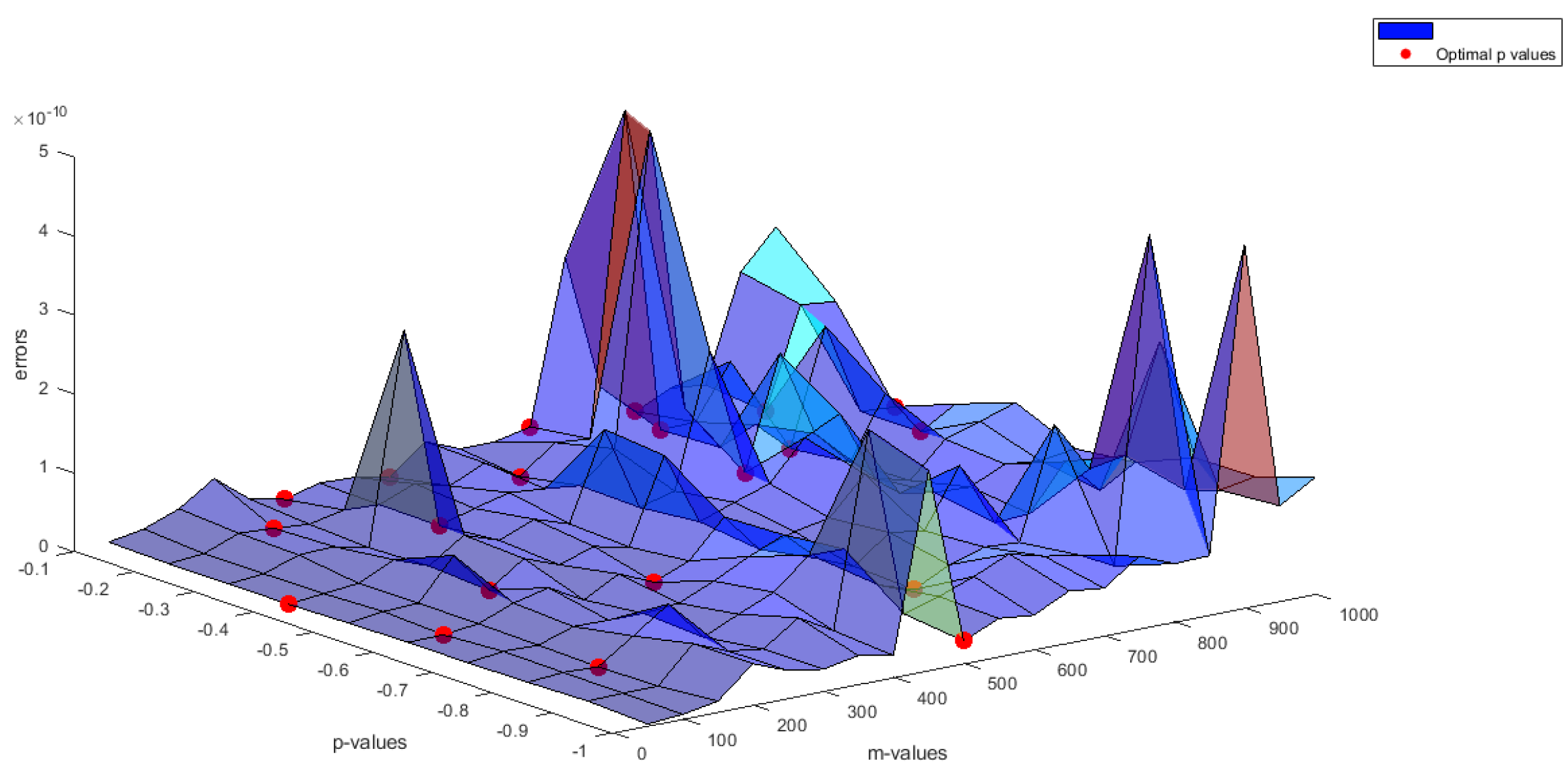
Figure 2.
CPU times according to m and optimal values.
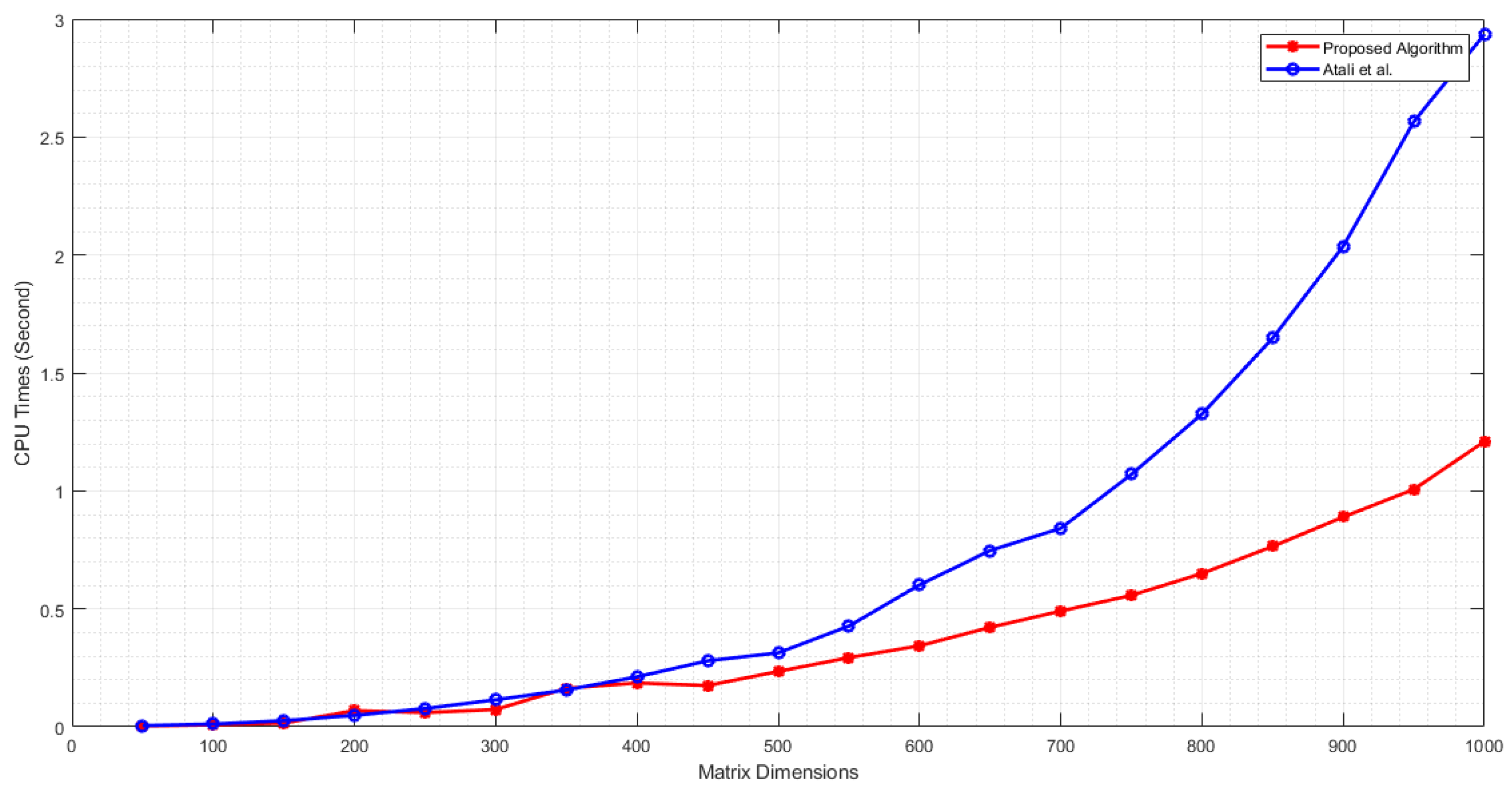
Figure 3.
Errors according to m and optimal values.
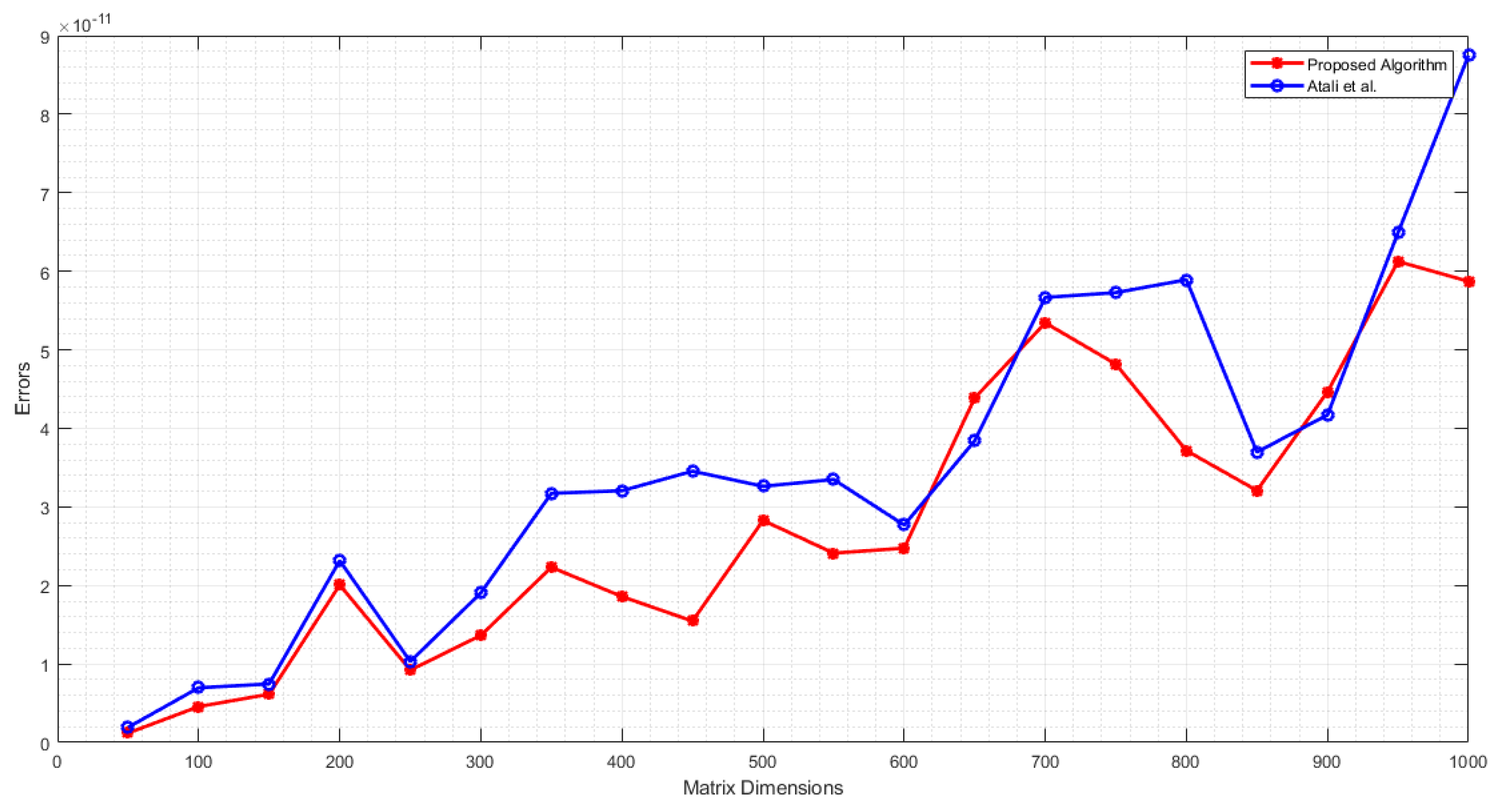
Table 2.
Classification of numbers.
| Generalized complex numbers | Hyperbolic complex numbers | Parabolic complex numbers | Elliptic complex numbers |
| Generalized segre quaternions | Hyperbolic quaternions | Parabolic quaternions | Elliptic quaternions |
Table 3.
Notations.
| Complex number | Elliptic complex number | Elliptic quaternion | |
| Complex matrix | Elliptic complex matrix | Elliptic quaternion matrix |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



