
Submitted:
06 August 2024
Posted:
07 August 2024
You are already at the latest version
Abstract
This paper introduces LUNARMINERS framework and applies it for lunar water-ice extraction in Shackleton Crater at the lunar South Pole. The LUNARMINERS combines artificial intelligence swarm robotics with biomimetic swarm behavior. In the proposed framework, the foraging behavior of ants, the light attraction behavior of fireflies, and the migratory flight strategy of wild geese have been comprehensively analyzed and applied to robotic swarms for lunar mining. This research takes into consideration important aspects of the lunar environment, such as permanently shadowed regions (PSRs) and communication limitations in lunar craters, by simulating them in Robot Operating System (ROS). The LUNARMINERS framework has advantages over other methods in that it allows for the survey of an area of 0.025 km2 per day while achieving 100% water-ice deposition effectiveness. Studies show that by applying the LUNARMINER framework, the exploration of the entire Shackleton Crater can be completed in 3.75 Earth years via 15 robots. Simulations of the implementation of the proposed LUNARMINERS framework have demonstrated reliable high-levels of extraction efficiency, with the framework producing 12.9 metric tons of water-ice per day, which potentially can support up to 1,990 people per day based on astronaut’s daily water requirements from NASA's Human Integrated Design Handbook (HIDH) and thus, establishing a sustainable benchmark for lunar habitation. The results from this study show that the advances in the proposed LUNARMINERS framework can contribute to future lunar exploration and ISRU, setting new standards for sustainable off-Earth mining.
Keywords:
extraterrestrial mining
; LUNARMINERS
; shackelton crater
; swarm robotics
; nature inspired behavior
; water-ice extraction
1. Introduction
Extraterrestrial exploration is gaining increasing attention and is one of humankind’s most ambitious frontiers. The Moon has become a major focus of space exploration research, not just because of its rich mineral resources like iron, titanium, uranium, aluminum, calcium, lithium, zirconium, niobium, tantalum, helium 3, and rare earth elements (REE) [1], but because these resources are critical for long-duration human exploration with humans-in-the-loop and there is currently significant research being conducted on in-situ resource utilization (ISRU). The era of lunar exploration began with the Soviet Union's Luna program, with Luna 2 making history in 1959 by becoming the first spacecraft to reach the lunar surface, providing valuable data on the lunar composition [2]. The pinnacle of this era was NASA's Apollo program, culminating in the historic manned Moon landing of Apollo 11 in 1969, a watershed moment in human capabilities in space exploration [3]. In the 21st century, lunar exploration, such as NASA's Lunar Reconnaissance Orbiter (LRO), has turned its focus to understanding lunar resources, most importantly the discovery of water-ice in permanently shadowed craters at the poles [4]. These missions are highlighting the potential of the Moon as a springboard for deeper space missions, where resources such as water-ice are critical for life support and propellant [5]. Extensive research on the Moon's geology has shown that its regolith contains helium 3, a potential source of clean renewable energy, and rare earth elements critical to various technologies on Earth [6]. The presence of these resources on the Moon highlights the importance of further advancing lunar exploration technologies. However, alongside of major interest in lunar exploration, the harsh environment of the Moon poses substantial challenges. The extreme temperature fluctuations from -173 °C to 127 °C, the hard vacuum at the lunar surface, and the fine and abrasive lunar regolith create severe operational difficulties [7]. Machinery designed for these conditions often suffers from increased wear and shortened service life, as evidenced by problems encountered during the Apollo missions and the failure of China's Yutu lunar rover [8]. Considering the failures of relatively large machines used for space exploration, i.e. Opportunity’s wheel failure and inability to recover from a dust storm [9], Sojourner’s limited mobility and short mission duration [10], and Curiosity’s wheel damage and operational challenges [11], it's worth mentioning that one would recommend the concept of a small robot swarm over large, expensive space exploration rover. Additionally, transporting water to orbit is extremely costly, with estimates around $10,000 per kg [12], and $35,000 to 70,000 per kg to the lunar surface [46]. The current mining system and bulky equipment are not suitable for space mining, further emphasizing the needs of developing lunar extraction technologies.
Current rover applications for space exploration, such as the Soviet Lunar Rovers and NASA's Mars Rovers, are not designed for extraction minerals in large scale or space mining [7]. There has been significant research and development in the field of ISRU for space missions, including water ice extraction and the production of oxygen and metals from regolith, as well as using regolith itself as a construction material. However, the current state of the art in this sector has not yet fully explored the processes of deep excavation, and large-scale space mining [5]. Terrestrial mining and technology cannot apply to space mining, due to the Moon's unique topography, communication limitations [13], abrasive regolith, extreme temperatures, and low gravity [14]. Our study proposes autonomous swarm robotics for lunar water-ice extraction that is inspired from collective behaviors in nature to achieve efficient, effective and resilient operations.
This paper focuses on the application of robotics to lunar mining by implementing swarms of small robots to extract water-ice from lunar regolith. For this the framework LUNARMINERS has been proposed. Inspired by various insects’ and animals’ collective behaviors in nature, the proposed framework uses biomimicry to develop a coordinated approach for collaboration, decision-making, and task execution among robot swarms [16, 17]. Ultimately, this research not only aims to push the boundaries of human space exploration, but also foresees a future where space technological advances cultivated for lunar soil could reshape life on Earth. The advancement of LUNARMINERS space mining technology can revolutionize terrestrial mining industry in terms of swarm robotic mining, smart mining and mining automation, to further enhance mine efficiency, sustainability, automation and safety.
2. Theoretical Framework
The main goal of this research project is to develop a swarm robotic system for extracting lunar water-ice under lunar conditions. In the process of developing this LUNARMINERS framework, creating a simulated lunar world map and swarm robots for water-ice extraction were among the key and most difficult tasks. The Robot Operating System (ROS) was implemented in the development of this framework because of its ability to create complex robotic systems and exhibit a high degree of scalability and adaptability to various robotic applications. In this framework, ROS software has been used to create target lunar conditions and swarm robotic system where the swarm of robots collaborates, communicates, navigates and makes decisions to conduct lunar water-ice extraction.
2.1. Mining Site Selection
Lunar craters, e.g. Shackelton Crater, located at the lunar poles are considered to have a high probability of forming permanent ice at the crater bottom, with permanently shadowed areas acting as “cold traps” capturing volatiles such as hydrogen in the form of water-ice [18]. The age of Shackleton Crater ranges from 1.1 to 3.3 billion years, belonging to the Eratosthenes period [19] and has a diameter of 21 km and a depth of 4.2 km [20]. The crater walls have an average slope of 31°, and the floor diameter is 6.8 km [38]. The crater floor is flat [37], with minimal thermal fluctuations [21]. The frozen lunar regolith in Shackelton Crater situated at the lunar south pole, contains water content exceeding 5.6 ± 2.9 wt%, as determined from analyses of the regolith at the Lunar Crater Observing and Sensing Satellite (LCROSS) impact site [22]. According to the LRO Mini-RF orbital radar reported that the upper limit of 5 wt% to 10 wt% of water-ice deposits (up to 30 vol.%) presents in the uppermost 1 to 2 meters of silicate regolith accounts with the observations obtained from Clementine bistatic experiment [36].
This study evaluated only the surface of the floor of Shackelton crater, and when considering the potential for uniaxial compressive strength (UCS), lunar regolith with an 8.4% ice composition is projected to have a UCS ranging from 31 to 43 MPa and a relative density between 84 and 90 Dr% [23]. This regolith can be effectively excavated using surface bucket drum excavation mining methods, akin to the methods employed for extracting moderate-strength limestones, sandstones, and shales [23, 24]. According to Haruyama's 2008 study, Shackleton Crater could be used for both surface and underground mining because its denser formation and shallow layer of lunar dust above it make accessing water-ice mineral easier [20]. Studies showed that it had a stable and uniform topography with very low rim height fluctuations, allowing for safer and easier landings [25, 26]. The geological structure of Shackleton Crater and the landing site near Shackleton Crater have been studied and taken from the LROC Quick Map as shown in Figure 1 [27].
2.2. Water-Ice Extraction Process
In lunar craters located at the lunar south pole, ice exists in two physical states. It can be solid, binding the regolith together to form a solid that is as hard as rock at the low temperatures of the PSR. Alternatively, the ice can be granular, either loose particles or loosely bound particles that can be excavated using a scooping method [43]. According to data from the Lunar Propellant Outpost (LUPO) mission [42] and Chandrayaan-1 M3, the regolith in Shackleton crater contains between 5 wt% and 30 wt% ice [45]. In our case, the regolith in Shackleton crater is granular, bound together with silicate regolith to form a layer of granular icy regolith [36]. The excavation robot will scoop up the frozen regolith using a bucket excavator, deposit it into block capsule to store the ore body and transport these blocks using a hauler robot equipped with a robotic arm.
The processing plant involves a lunar water ice extraction process that uses low-power microwave heating to extract water from transported ore block [39]. In this study, calculations will focus only on water removal by heating, ignoring other factors such as sublimation losses, ore losses during extraction, capture of water vapor, and heating performance. The collected regolith can be used for other extraction methods including extraction via reactive gas (hydrogen reduction, fluorination, solid state and molten reduction), electrolysis reduction (molten regolith or molten salt electrolysis (e.g. Fray, Farthing and Chen (FFC) Cambridge process)) and vapors phase pyrolysis [40]. The base station, processing plant and maintenance site will be powered by solar energy collected from the rim of Shackleton Crater and delivered to the base station. This study will not cover the details of the processing plant associated with water removal by heating, nor will it address further processing of the regolith.
2.3. Constraints and Assumption
The development of the LUNARMINERS framework faces several significant technical limitations that need to be addressed to ensure its efficiency and feasibility. One of the main challenges is communications at the lunar south pole, especially within Shackleton Crater, where signals are disrupted due to the lack of atmosphere and polarization effects [37]. These limitations lead to the assumption that communications disruptions will not have a significant impact on operations and that robots can handle communications with each other and with the base station. In permanently shadowed regions (PSRs), visualization is severely limited; therefore, the robots will rely on long-term planning and short-term management for navigation. Energy efficiency is critical due to the limited energy available on the Moon. While solar panels can be installed on the rim of Shackleton Crater, installation inside the crater is not feasible, so energy consumption needs to be optimized and possible recharging strategies developed.
The extreme temperatures of Shackleton Crater will affect the operation of the mining robot. However, the study did not go into details of the robot's specifications, such as the materials used or its temperature sustainability, nor did it go into further design specifications of the robot. The fine and loose regolith in Shackleton Crater poses additional challenges, including the risk of loss of traction, blockages, and deviations from the intended path, which can affect the accuracy of the robot's movements. Therefore, the robot needs to be equipped with path tracking sensors to ensure accurate travel. In addition, maintenance is a key aspect of operations involving self-repair, where the robot can autonomously repair minor damage. When a robot can no longer effectively perform its tasks, it is considered unavailable or malfunctioning and is deactivated to ensure continued production. Collectively, these limitations and assumptions highlight the need for a robust and adaptable framework to address the unique challenges of lunar water ice extraction.
2.4. Virtual Lunar Environment Development
The proposed LUNARMINERS simulations were conducted in a Robot Operating System (ROS) running Ubuntu Linux version 18.04 with a built-in Gazebo system and graphical user interface (GUI) for controlling and monitoring water-ice extraction in a virtual lunar environment. The entire system was run on an HP Zen2 G5 TWR system with Intel(R) Core (TM) i7-10700 CPU, 16 GB RAM and a 64-bit operating system. Built in ROS’s Unified Robot Description Format (URDF), the robot GUI is developed 0.15 meters tall, 0.1 meters long, and weighs 60 kilograms. It is also equipped with battery, advanced lidar sensors, automatic control systems, and decision-making algorithms. ROS functions such as Rviz and OpenCV were used to visualize specific robots and sensor data in the swarm to evaluate the effectiveness of the swarm robots for lunar water-ice extraction and lay the foundation towards practical implementation of the proposed autonomous lunar mining system.
A simulated virtual lunar environment was developed to mine water ice deposits, with a focus on mining over large areas rather than increasing the depth of excavation. This approach was based on LRO Mini-RF orbital radar reports that water ice deposits are located within the top 1–2 m, eliminating the need for deeper excavation [36]. According to NASA Innovative Advanced Concepts (NIAC), when water vapor enters the Moon's PSR from sources such as comet impacts, interplanetary dust, or space plasma interactions, it freezes in the coldest surface layers, forming a water vapor barrier that prevents deeper migration. This results in the accumulation of pure ice on the surface of the regolith, where fine powders of pure ice mix with the soil during surface disturbance, which is supported by Hurley's observations and models [44], further explaining why excavation was only done on the surface rather than in the subsurface. In addition, limited power supply on the Moon requires optimizing energy consumption for surface operations. The microrobots designed for this mission further emphasize the need for energy efficiency, making deep excavation less feasible.
In addition, water ice deposits were found on the floor of Shackleton Crater, where the wall areas were not considered due to the need for advanced techniques such as grabbing or hanging, which consume more energy and increase mining complexity. Therefore, the floor of Shackleton Crater was chosen for this case study. A virtual lunar environment of the floor of Shackleton Crater was simulated in ROS, with a flat gray surface (6.6 m x 6.6 m) representing the entire mining area. In the simulation, black circles represent collection points, yellow squares represent maintenance points, green squares represent base stations, blue squares represent processing points, green areas represent mining points, and blue areas represent transportation points. Robot teams are distinguished by different colors: four orange Explorer robots are used for exploration, two green Excavator robots are used for mining, four yellow Hauler robots are used for collection, and two blue Transporter robots are used for transporting minerals. Due to the limitations of ROS, we consider using 15 robots to form a team, as shown in Figure 2.
2.4. Swarm Robotic Development.
Transporting materials into space has limitations due to exceptionally high costs, whereas the development of swarm robotic systems requires large numbers of robots. Hence, the optimal minimum number of swarm robots that will allow to provide resources and help humans survive on the Moon must be considered. To explore the vast area of Shackleton Crater’s floor, the concept of rapid full-coverage exploration needs to be addressed. The robot's specifications were derived from NASA's Regolith Advanced Surface Systems Operation Robot (RASSOR) 2.0, which has a Technology Readiness Level (TRL) of 4 [28]. RASSOR 2.0 is a planetary excavator that measures 1.93 x 0.85 x 0.43 meters, weighs 67 kg, and is powered by a 1410 Whr lithium battery with a power consumption of 4 W per kg of regolith excavation [29, 41]. Based on the findings from RASSOR 2.0 [28], four explorer robots were built with operating parameters of movement speeds of up to 0.72 km/h (20 cm/s), sensor range of 10 m wide, 16 hours of operation per day, and 80% availability, which provided an overview of a single rover traveling 7 kilometers per day or, equivalently, four explorer robots traveling approximately 0.46 km2 per day. The total area at the bottom of Shackleton Crater is approximately 32.7 km2, and four detection robots can cover the entire area within 72 Earth days.
For building two excavator robots in the proposed LUNARMINERS framework, it has been calculated that RASSOR 2.0 can excavate 2.7 metric tons of regolith per day [29] and can produce 1232 kg of oxygen [30] using 45% molten salt electrolytic oxygen extraction. The two excavator robots can produce about 2,465 kg of oxygen per day, which is more than enough for about 2,770 people based on the estimated daily consumption of 0.89 kg of oxygen per astronaut according to NASA's Integrated Human Design Handbook (HIDH) [31]. The terrestrial mining method “excavator and hauler spotting system” in open-pit mining has been implemented into the proposed framework, where two haulers follow each excavator during excavation operations. Four hauler robots have been built for continuous harvesting, loading of regolith without any downtime waiting for hauler trucks to become available, and to maximize operational efficiency. Two transporter robots have been built to reduce transport times from the mine to the processing plant, and they collect ore deposit midway from the gathering area and move it to the processing plant.
3. Proposed LUNARMINERS Concept
The proposed LUNARMINERS framework involves the application of bioinspired swarm robots to extract water-ice in Shackleton Crater. The mining life cycle of the proposed framework is discussed below, which is inspired by insects’ and animals’ natural behaviors and facilitates group behavior, especially in terms of classifications such as spatial organization, navigation, decision-making, etc. [32]. The proposed Lunar Miner framework addresses these challenges by drawing inspiration from the natural behaviors of fireflies, ants, and geese. The bioluminescent attraction ability of fireflies enables swarm robots to locate mineral deposits by illuminating their surroundings, thereby overcoming navigation and communication issues in permanent darkness. The division of labor of leaf-cutter ants can shorten the distance between mining sites and processing plants, facilitating efficient material handling and task distribution. To ensure continued production and autonomy without human intervention, the geese's migratory flight strategy involves replacing the lead goose and allowing the others to rest and recover, providing insights into energy optimization and dynamic role replacement. This strategy helps maintain continuous operations in the harsh lunar environment. The inspiration from nature comes, namely, from the firefly synchronization technique for precise positioning under low-light conditions, leafcutter ant’s division of labor for efficient task allocation, and the migration goose V-shaped model for dynamic robot replacement and energy optimization, as is shown in Figure 3.
3.1. LUNARMINERS Mining Lifecycle
The LUNARMINERS framework details a systematic approach to water-ice extraction, where a finite state machine (FSM) of a swarm robot controller represents the flow of operational tasks for the robots during each mining lifecycle, as is shown in Figure 4.
3.1.1. Resource Prospecting and Localization
The resource exploration and positioning phase includes surveying the entire mining area and identifying and confirming whether there are water-ice deposits under the lunar regolith. The explorer robot is equipped with advanced LiDAR sensors for mapping and navigation in mining areas. For water detection, the robot uses specialized instruments such as neutron spectrometers or ground-penetrating radar (GPR), which are designed to identify the presence of water-ice deposits. Once detected, it locates the ore deposits using a battery-powered skylight that utilizes navigation and pinpoint positioning capabilities to cope with the harsh lunar environment. To address issues due to the permanently shadowed areas at Shackleton Crater, lack of Global Positioning System (GPS), lunar storms, and problems with wheel traction, advanced search modes such as strip searches and navigation strategies were created, which proved to be more efficient than using another search pattern to cover a large lunar environment [33]. We have applied the strip search strategy to the LUNARMINERS resource exploration stage and integrated novel piecewise functions in Equation 1, to ensure the linear path of the exploration robot, prevent trajectory deviation and achieve precise area coverage, as shown in Figure 5.
Where, (L) is the total length of the search path; (x) is the distance the robot travels along the path; (p) is the offset distance used to correct for situations where the robot deviates from the expected path; And the function f accounts for the robot's decisions regarding trajectory deviations to ensure accurate coverage of the entire mining area.
In our simulation, the total length of the search path (L) is set to 660 m and the correction offset (p) is 10 m, where the maximum deviation of the realignment can be 10 m. This adaptive navigation and localization mechanism of the proposed framework is inspired by the bioluminescent light attraction behavior of fireflies, where explorer robots represent healthy fireflies that turn on their bioluminescent bright light in a dark environment to attract mates, which serves as a navigation strategy in permanent shaded region in the Shackleton Crater.
3.1.2. Mineral Excavation and Transportation
The mineral extraction and transportation stage involves extracting water-ice deposits and transporting them from the mine to the processing plant. The base centre analyses the results obtained by the exploration robot and then recruits excavators to navigate to the site based on the skylight where the exploration robot is located. In the proposed framework, the Firefly's behavioral and algorithmic parameters such as light intensity and aggregation behavior have been applied. Furthermore, in the LUNARMINERS framework a unique strategy where the excavator robot is able to decide on its own which location to approach based on the light intensity, distance and angle at which the light signal is received, has been implemented as shown in Figure 6.
Where, the target position (TP) represents the most favorable and priority location that the excavator will go to; the term ‘argmax’ is a mathematical function used to position the value of a given variable to maximize the result of a formula. The excavator measures the light intensity (i) and distance function (D) at a specific location during movement, where Dmax is the maximum distance that the excavator can move in a single step. In the presented simulations, the skylight intensity i (x, y) is set to a range between 1000 lux and 0 lux for beacon detection with 100 m range detection. For the probability of selecting D (x, y) in the argmax function, the efficiency factor is set to 0.75 to avoid biased selection, ensuring better interpretation of results.
The environmental degradation factor is set to 0.2 is included to mitigate the impact of the lunar environment, and the skylight brightness and robot distance are given priority. The environmental degradation factor in this context does not refer to the degradation of electromagnetic radiation. Instead, it accounts for the challenges posed by the lunar surface conditions, such as dust accumulation on sensors, which can reduce their efficiency and effectiveness over time. Additionally, while electromagnetic radiation itself does not degrade in a lunar vacuum, the accumulation of lunar dust and the extreme temperature fluctuations can impact the performance and reliability of the robots' components. This targeting mechanism improves navigation accuracy and decision-making based on multiple sensed lights being detected.
The excavator robot will rotate the bucket drum to dig the frozen regolith from the ground and store it in ore block capsules for further transportation. The hauler robot positioning system is integrated into the mineral excavation and collection phase. The hauler robot with ore block’s sensors locates the extracted water ice blocks and delivers them to the collection site. The hauler robot then picks up the ore block capsules and transfers them to the collection area. The positioning system enables continuous mining and loading. While one hauler robot collects the extracted water ice blocks, another hauler robot positions itself for subsequent loading, ensuring an efficient and uninterrupted workflow.
The transport distance from the mine to the processing plant was too long, being approximately 4.95 km and in real lunar environment it will take 6.88 hours to deliver just once from the mine site to the processing plant. However, a material handling mechanism has been implemented in the LUNARMINERS inspired by the division of labor behavior of leafcutter ants, which has reduced the transport distance by half and hence also reduced the duration of travel. Leafcutter ants cut leaves and throw them on the ground, then carrier ants transport the fallen leaves to another collection area near the nest, and after this another group of carrier ants collects the leaves from the collection area back to the nest for fungal culture [34]. Similar task distribution capabilities have been implemented into the LUNARMINERS framework to speed up transportation from the mine to the processing plant. Transporter robots collect and carry the water-ice ore blocks from the collection sites to the processing plants, as is shown in Figure 7.
3.1.3. Maintenance and sustainability
The maintenance and sustainability phase involves swarm automation, where a robot detects a malfunction and transfers the task to another replacement robot before automatically returning to the maintenance site. A self-recovery mechanism inspired by the flight formation strategy of migratory geese, where geese fly in a V-shape and tend to rotate their leadership tasks, allowing them to conserve energy and extend their migratory flight time, has been implemented in LUNARMINERS framework, as is shown in Figure 8.
Where, the robot operation index (RI) considers the battery power (Bl), component wear (Wl), operating time (0t), factor parameters (α), (β), (γ) and (δ), and the operating balance parameter (ω) to balance robot indicators and operating efficiency. In the presented simulations, the battery level, component wear, energy consumption, and operational time of (Bl), (Wl), (Er), and (Ot) were set to 0.3, 0.2, 0.4, and 0.1, respectively, to balance robot metrics and operational efficiency. In terrestrial mining, there is availability, utilization and downtime; in space lunar mining, to increase reliability, 80% availability has been considered. This role-shifting and energy-saving mechanisms enable swarm robots to self-recover through task rotation and energy management to provide continuous operations. Self-assessment indicators have been embedded in each robot to check operating hours, battery and power levels, and component wear.
4. Results and Discussion
The proposed LUNAMINERS framework applies robotic swarms inspired by natural behaviors of insects and animals to extract water-ice from Shackleton Crater. The simulations performed well, and the results are in line with the operational procedures proposed in this paper.
4.1. Mining Perfromance
The LUNARMINERS mining life cycle includes resource exploration and localization, mineral extraction and collection, maintenance, and sustainability. Figure 9 shows the LUNARMINERS four mining lifecycles, illustrating that the explorer robot can discover mineral deposits and place skylights for precise positioning. The excavator then performs resource mining during the excavation phase, and the ore blocks are transported by hauler and transporter robots to the collection site and transported to the processing plant. A malfunctioning robot displays a red light on top, indicating that it is repairing itself and requesting a recovery mechanism to increase the system's resiliency.
4.2. Simulation Settings
The piecewise tracking function in Eq. (1) successfully solved the navigation deviation problem. A path deviation of 8 m from the desired path was employed by manually dragging the explorer robot to the north to trigger the path correction mechanism. Consequently, the path correction mechanism offset by 10 m was triggered to change the current path direction to the desired path, as is shown in Figure 5. The added piecewise tracking capabilities in the exploration stage demonstrated accurate mapping and exploration in unknown spaces with additional path deviation detection and corrected proximity. The greedy selection and target position equations of multiple skylights are shown in Equation (2), where the excavator’s decision-making reflects the precise selection of three skylights with different distances and light intensities as shown in Figure 6. The skylight with brightness of 400 lux at 50 m took precedence over the skylight with a higher intensity of 600 lux at 90 m. This implementation of firefly bioluminescence attraction behavior can enhance system trapping to local minimum selection and precisely select various options to achieve higher extraction efficiency and a more robust system. The Robot Operational Index (RI) in Equation (3) has been manually set to the worst scenario for checking the performance of the operating efficiency feature The RI was set to 30 at 20% power, and due to this the maintenance strategy with a threshold lower than 50 was successfully triggered to maintain operating efficiency. The purple replacement robot took over the task from the faulty robot, and the faulty robot automatically returned to the maintenance site for repairs, as is shown in Figure 8. This self-healing mechanism inspired by the geese’s migratory flight strategy involves dynamic role replacement that enhances the LUNARMINERS framework, allowing it to autonomously and seamlessly carry out water-ice extraction.
4.3. Overall Perfromance Analysis
In the presented simulation, the LUNARMINERS uses four exploration robots for rapid coverage exploration, showing perfect performance in resource exploration and positioning. In the simulated GAZEBO lunar environment, the explorer robot has traversed 6.6 m in 11.75 seconds at a normalized speed of 56 cm/s and completed a comprehensive survey of an area of 13.6 m2 in about 47 seconds, achieving the required coverage. This means that the daily exploration capacity is approximately 0.025 km2. It is estimated that it will take 3.75 years and 15 robot swarm to complete the survey of the entire Shackleton Crater’s floor and achieve a success rate of ice deposit identification of 100%, which is significantly better than the random search strategy with 65% efficiency. The proposed LUNARMINERS framework has demonstrated high efficiency in water-ice extraction. In a simulated environment with 5 mines, each extracting 20 blocks per mine, the system produces 1,263 blocks per Earth day. Each block consists of 80 kg of regolith with a water-ice concentration of 5.6 ± 2.9% [4, 23], resulting in the extraction of approximately 101 metric tons of regolith per Earth day and the production of approximately 5.66 metric tons of water per Earth day. Due to the simulated environment being scaled down by a factor of 1000, from the real measurement of 6.6 km to 6.6 m, the extraction performance also needs to be scaled down by the same factor. This results in the extraction of 0.1 tons of regolith and the production of 5.66 kg of water per Earth day (2.07 metric tons of water per Earth year), which could potentially support up to 319 people per Earth year, according to NASA's Human Integrated Design Manual.
4.4. Nature-Behaviour Calssification
The proposed LUNARMINEERS framework combines aspects of collective behaviors inspired from nature, such as the division of labor observed in leaf-cutting ants, the light attraction behavior of fireflies, and the migration flight strategy of wild geese, to create an autonomous, flexible, and adaptable swarm robotic system. The swarm robots in the proposed framework are categorized based on taxonomy of swarm robot behaviors, including spatial organization, navigation, decision-making, and miscellaneous [32], as is shown in Figure 10.
Spatial organization is evident in the LUNARMINERS swarm robots, as they can assemble into base stations after completing missions. These robots are also capable of forming clusters to collect minerals and transport them to processing plants. Navigation is achieved through collective exploration and positioning to discover mining areas and locate mineral deposits. The robots in the system exhibit coordinated motion, particularly in exploration where they follow a strip search strategy along linear paths. Inspired by leaf-cutter ants, efficient collective transport where hauler and transporter robots work together to transport materials, mirroring the division of labor in natural systems, has been achieved. Decision-making within the swarm is achieved through collective intelligence, allowing the robots to reach consensus and make consistent decisions. For instance, explorer robots gather geological data and open skylights, while excavators analyze light parameters to select optimal solutions. Hauler robots respond to signals from excavators to load materials and follow them to other sites. Task distribution involves assigning tasks to groups of robots, ensuring efficient performance. Collective fault detection enables malfunctioning robots to signal for replacement or maintenance, enhancing reliability. The system also incorporates self-healing inspired by wild geese migration, allowing robots to return for repairs and maintain functionality. The LUNARMINERS framework displays decentralized control, enabling each robot to operate autonomously and make decisions based on the environment.
The proposed LUNARMINERS framework showed promising results from the mining operations’ simulations run for water-ice extraction in Shackleton Crater and was able to resolve all issues that were introduced to the system during simulations. These findings show that LUNARMINERS framework agrees with models proposed by [35] on the applications of swarm algorithms to mining operation phases in mining lifecycle shown in Table 1.
In Table 1 ACO is for ant colony optimization, PSO is for particle swarm optimization, ABC is for artificial bee colony, FA is for firefly algorithm, BA is for bat algorithm, GWO is for grey wolf optimization, SSA is for salp swarm algorithm, GOA is for grasshopper optimization and KH is for krill herd algorithm.
In the presented LUNARMINERS framework for lunar water-ice extraction, inspiration has been drawn from three natural behaviors: the division of labor techniques observed in leaf cutter ants, the bioluminescent behavior of fireflies, and the leader exchange mechanism in migrating geese. These behaviors have been adapted to enhance various aspects of mining operations. The division of labor observed in leaf cutter ants has been utilized to improve transportation efficiency. This approach is particularly applicable to mine planning and design, specifically in haulage systems and mine operations. By mimicking the ants' labor division, a shorter transportation and harvesting times can be achieved. The bioluminescent behavior of fireflies, characterized by light attraction, has been applied to navigation within the permanently shadowed regions of Shackleton Crater. This technique is crucial for mine exploration and allocation, allowing for effective navigation of robotic swarms and the decentralized transmission of data between robots. Furthermore, this behavior aids in mine operation and construction by enabling precise detection of ore deposits. Lastly, the leader exchange behavior observed in migrating geese has been adapted to develop self-healing capabilities within swarm robots. This technique is particularly useful in mine planning to mitigate downtime and enhance the availability and utilization of mining trucks.
It is important to note that mine closure and rehabilitation are not considered within this framework. Instead, the LUNARMINERS swarm robots focus on environmentally friendly practices to ensure a reduced footprint throughout the mining process. The integration of the LUNARMINERS framework across different mining phases is detailed in Table 2. This table illustrates the application of nature-inspired behaviors to optimize various aspects of lunar mining operations, demonstrating the potential for improved efficiency and effectiveness in extraterrestrial resource extraction.
5. Conclusion
The proposed LUNARMINER framework demonstrates successful implementation of swarm robotic systems and nature-inspired behaviors for extracting lunar water-ice at Shackleton Crater. The problems deriving from harsh environments, permanent shadow areas, wheel traction, and transmission signal failures are taken into account and possible mitigation is offered with the LUNARMINERS framework. The model provides the capacity to extract and produce 5.66 kg of water per Earth day, enough for 319 people per Earth year, and is able to complete the exploration of the entire Shackleton Crater in 3.75 Earth years by a robot swarm comprising 15 robots, helping to make lunar harsh environment suitable for human habitation and future space missions, and promoting in-situ resource utilization (ISRU). Integrating the division of labor of leafcutter ants, the light attraction of fireflies, and the migratory flight strategy of wild geese into the LUNAMINERS hybrid model, a lunar water-ice extraction robot model with autonomy, elasticity, scalability, adaptability, and robustness has been created. The findings and results from the application of the LUNARMINERS framework demonstrate the reliability and advancement of implementing nature-inspired solutions and natural behaviors of insects and animals to solve complex swarm robotic missions, especially in space mining or harsh extraterrestrial environments. This research contributes towards sustainable human habitation in the lunar environment and demonstrates the efficiency of applying small swarm robots when the collective intelligence of swarms in nature is captured and applied to the robotic swarm’s behavior for use in terrestrial and extraterrestrial mining and future space exploration missions.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Crawford, I.A., 2015. Lunar resources: A review. Progress in Physical Geography, 39(2), pp.137-167.
- Harland, D.M. and Harvey, B., 2007. Space Exploration 2008. Springer Science & Business Media.
- Ellis, T., 2018. Reds in space: American perceptions of the Soviet space programme from Apollo to Mir 1967-1991 (Doctoral dissertation, University of Southampton).
- Colaprete, A., Schultz, P., Heldmann, J., Wooden, D., Shirley, M., Ennico, K., Hermalyn, B., Marshall, W., Ricco, A., Elphic, R.C. and Goldstein, D., 2010. Detection of water in the LCROSS ejecta plume. science, 330(6003), pp.463-468.
- Sanders, G.B., Romig, K.A., Larson, W.E., Johnson, R., Rapp, D., Johnson, K.R., Sacksteder, K., Linne, D., Curreri, P., Duke, M. and Blair, B., 2005, September. Results from the NASA capability roadmap team for in-situ resource utilization (ISRU). In International Lunar Conference 2005 (No. KSC-2005-116).
- Bezruchko, K.A., 2022. Review of potential sources for obtaining energy carriers and mineral raw materials in outer space.
- Heiken, G., Vaniman, D. and French, B.M. eds., 1991. Lunar sourcebook: A user's guide to the Moon (No. 1259). Cup Archive.
- Liu, H., 2014. An overview of the space robotics progress in China. System (ConeXpress ORS), 14, p.15.
- Arvidson, R.E., Ashley, J.W., Bell III, J.F., Chojnacki, M., Cohen, J., Economou, T.E., Farrand, W.H., Fergason, R., Fleischer, I., Geissler, P. and Gellert, R., 2011. Opportunity Mars Rover mission: Overview and selected results from Purgatory ripple to traverses to Endeavour crater. Journal of Geophysical Research: Planets, 116(E7).
- Wilcox, B. and Nguyen, T., 1998. Sojourner on mars and lessons learned for future planetary rovers (No. 981695). SAE Technical Paper.
- Rankin, A., Patel, N., Graser, E., Wang, J.K.F. and Rink, K., 2022, March. Assessing Mars Curiosity rover wheel damage. In 2022 IEEE Aerospace Conference (AERO) (pp. 1-19). IEEE.
- Dunbar, B., n.d. Advanced Space Transportation Program Fact sheet, NASA. NASA. Available at: https://www.nasa.gov/centers/marshall/news/background/facts/astp.html. (Accessed: 18 July 2024).
- Satish, H., Radziszewski, P. and Ouellet, J., 2005. Design issues and challenges in lunar/Martian mining applications. Mining Technology, 114(2), pp.107-117.
- Cui, Q., Wang, T., Gu, G., Zhang, R., Zhao, T., Huang, Z., Wang, G. and Chen, F., Ultraviolet and Thermal Dual-Curing Assisted Extrusion-Based Additive Manufacturing of Lunar Regolith Simulant for In-Site Construction on the Moon. Available at SSRN 4481462.
- Petersen, K.H., Napp, N., Stuart-Smith, R., Rus, D. and Kovac, M., 2019. A review of collective robotic construction. Science Robotics, 4(28), p.eaau8479.
- Beni, G. and Wang, J., 1989. Swarm intelligence in cellular robotic. In Systems Proceedings of NATO Advanced Workshop on Robots and Biological Systems (Vol. 102).
- Şahin, E., 2004, July. Swarm robotics: From sources of inspiration to domains of application. In International workshop on swarm robotics (pp. 10-20). Berlin, Heidelberg: Springer Berlin Heidelberg.
- Landis, M.E., Hayne, P.O., Williams, J.P., Greenhagen, B.T. and Paige, D.A., 2022. Spatial distribution and thermal diversity of surface volatile cold traps at the lunar poles. The Planetary Science Journal, 3(2), p.39.
- Spudis, P.D., Bussey, B., Plescia, J., Josset, J.L. and Beauvivre, S., 2008. Geology of Shackleton Crater and the south pole of the Moon. Geophysical research letters, 35(14).
- Haruyama, J., Ohtake, M., Matsunaga, T., Morota, T., Honda, C., Yokota, Y., Pieters, C.M., Hara, S., Hioki, K., Saiki, K. and Miyamoto, H., 2008. Lack of exposed ice inside lunar south pole Shackleton crater. Science, 322(5903), pp.938-939.
- Vasavada, A.R., Paige, D.A. and Wood, S.E., 1999. Near-surface temperatures on Mercury and the Moon and the stability of polar ice deposits. Icarus, 141(2), pp.179-193.
- Halim, S.H., Barrett, N., Boazman, S.J., Gawronska, A.J., Gilmour, C.M., McCanaan, K., Satyakumar, A.V., Shah, J. and Kring, D.A., 2021. Numerical modeling of the formation of Shackleton crater at the lunar south pole. Icarus, 354, p.113992.
- Gertsch, L., Gustafson, R. and Gertsch, R., 2006, January. Effect of water ice content on excavatability of lunar regolith. In AIP conference proceedings (Vol. 813, No. 1, pp. 1093-1100). American Institute of Physics.
- McKay, D.S., Heiken, G., Basu, A., Blanford, G., Simon, S., Reedy, R., French, B.M. and Papike, J., 1991. The lunar regolith. Lunar sourcebook, 567, pp.285-356.
- Ambrose, W. A., 2013, The significance of lunar water ice and other mineral resources for rocket propellants and human settlement of the Moon, in W. A. Ambrose, J. F. Reilly II, and D. C. Peters, eds., Energy resources for human settlement in the solar system and Earth's future in space: AAPG Memoir 101, p. 7–31.
- Paschall, S.C., Brady, T., Cohanim, B.E. and Sostaric, R., 2008, March. A self contained method for safe & precise lunar landing. In 2008 IEEE Aerospace Conference (pp. 1-12). IEEE.
- Act-react QuickMap, (n.d.). LROC QuickMap. (Accessed: 18 July 2024).
- Mueller, R.P., Cox, R.E., Ebert, T., Smith, J.D., Schuler, J.M. and Nick, A.J., 2013, March. Regolith advanced surface systems operations robot (RASSOR). In 2013 IEEE Aerospace Conference (pp. 1-12). IEEE.
- Mueller, R.P., Smith, J.D., Schuler, J.M., Nick, A.J., Gelino, N.J., Leucht, K.W., Townsend, I.I. and Dokos, A.G., 2016, April. Design of an excavation robot: regolith advanced surface systems operations robot (RASSOR) 2.0. In 15th Biennial ASCE Conference on Engineering, Science, Construction, and Operations in Challenging Environments (pp. 163-174). Reston, VA: American Society of Civil Engineers.
- Hugo, A. (2020) ESA molten salt electrolysis plant to study oxygen extraction from regolith, The Space Resource. Available at: https://www.thespaceresource.com/news/2020/1/esa-molten-salt-electrolysis-plant-to-study-oxygen-extraction-from-regolith (Accessed: 18 July 2024).
- Ewert, M. and Stromgren, C., 2019, July. Astronaut mass balance for long duration missions. 49th International Conference on Environmental Systems.
- Brambilla, M., Ferrante, E., Birattari, M. and Dorigo, M., 2013. Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 7(1), pp.1-41.
- Ghanem, M. and Sobh, Z.K., 2021. Crime Scene Searching: An Exploration of Forensic Evidence. Crime Scene Management within Forensic science, pp.37-50.
- Di Pietro, V., Govoni, P., Chan, K.H., Oliveira, R.C., Wenseleers, T. and van den Berg, P., 2022. Evolution of self-organised division of labour driven by stigmergy in leaf-cutter ants. Scientific Reports, 12(1), p.21971.
- Tan, J., Melkoumian, N., Harvey, D., Akmeliawati, R. Classifying Nature-Inspired Swarm Algorithms for Sustainable Autonomous Mining. Insights Min Sci technol.2024; 4(3):555636. DOI: 10.19080/IMST.2024.04.5556236.
- Thomson, B.J., Bussey, D.B.J., Neish, C.D., Cahill, J.T.S., Heggy, E., Kirk, R.L., Patterson, G.W., Raney, R.K., Spudis, P.D., Thompson, T.W. and Ustinov, E.A., 2012. An upper limit for ice in Shackleton crater as revealed by LRO Mini-RF orbital radar. Geophysical Research Letters, 39(14).
- Wagner, R.V., Robinson, M.S., Speyerer, E.J. and Mahanti, P., 2013, March. Topography of 20-km Diameter Craters on the Moon. In Lunar and Planetary Science Conference (Vol. 44, p. 2924).
- Pugacheva, S.G., Feoktistova, E.A. and Shevchenko, V.V., 2016. On the nature of the impactor that formed the Shackleton crater on the Moon. Earth, Moon, and Planets, 118(1), pp.27-50.
- Cole, J.D., Lim, S., Sargeant, H.M., Sheridan, S., Anand, M. and Morse, A., 2023. Water extraction from icy lunar simulants using low power microwave heating. Acta Astronautica, 209, pp.95-103.
- Schlüter, L. and Cowley, A., 2020. Review of techniques for In-Situ oxygen extraction on the moon. Planetary and Space Science, 181, p.104753.
- Cannon, K.M., Mueller, R.P., Deutsch, A.N., Van Susante, P., Tarnas, J.D., Colaprete, A.C., Sowers, G., Dreyer, C.B., Li, S., Sercel, J. and Dove, A.R., 2020, May. The Snow Badger mission concept: Trenching for ice with humans and robots. In Lunar Surface Science Workshop (Vol. 2241, p. 5108).
- Rabagliati, L., Devecchi, M., Lovagnini, A., Pino, P. and Thirion, G., 2021. Regolith Mining in Shackleton Crater on the Moon: Propellant, Building Materials and Vital Resources Production for a Long Duration Manned Mission. International Journal of Astronautics and Aeronautical Engineering, 6(1).
- Metzger, P.T., Sapkota, D., Fox, J. and Bennett, N., 2021. Aqua Factorem: Ultra Low Energy Lunar Water Extraction (No. Grant Number 80NSSC 20K1022).
- Hurley, D.M., Lawrence, D.J., Bussey, D.B.J., Vondrak, R.R., Elphic, R.C. and Gladstone, G.R., 2012. Two-dimensional distribution of volatiles in the lunar regolith from space weathering simulations. Geophysical Research Letters, 39(9).
- Li, S., Lucey, P.G., Milliken, R.E., Hayne, P.O., Fisher, E., Williams, J.P., Hurley, D.M. and Elphic, R.C., 2018. Direct evidence of surface exposed water ice in the lunar polar regions. Proceedings of the National Academy of Sciences, 115(36), pp.8907-8912.
- Sowers, G.F., 2016. A cislunar transportation system fueled by lunar resources. Space Policy, 37, pp.103-109.
Figure 1.
Landing site and geological formation in Shackelton crater [27].
Figure 1.
Landing site and geological formation in Shackelton crater [27].
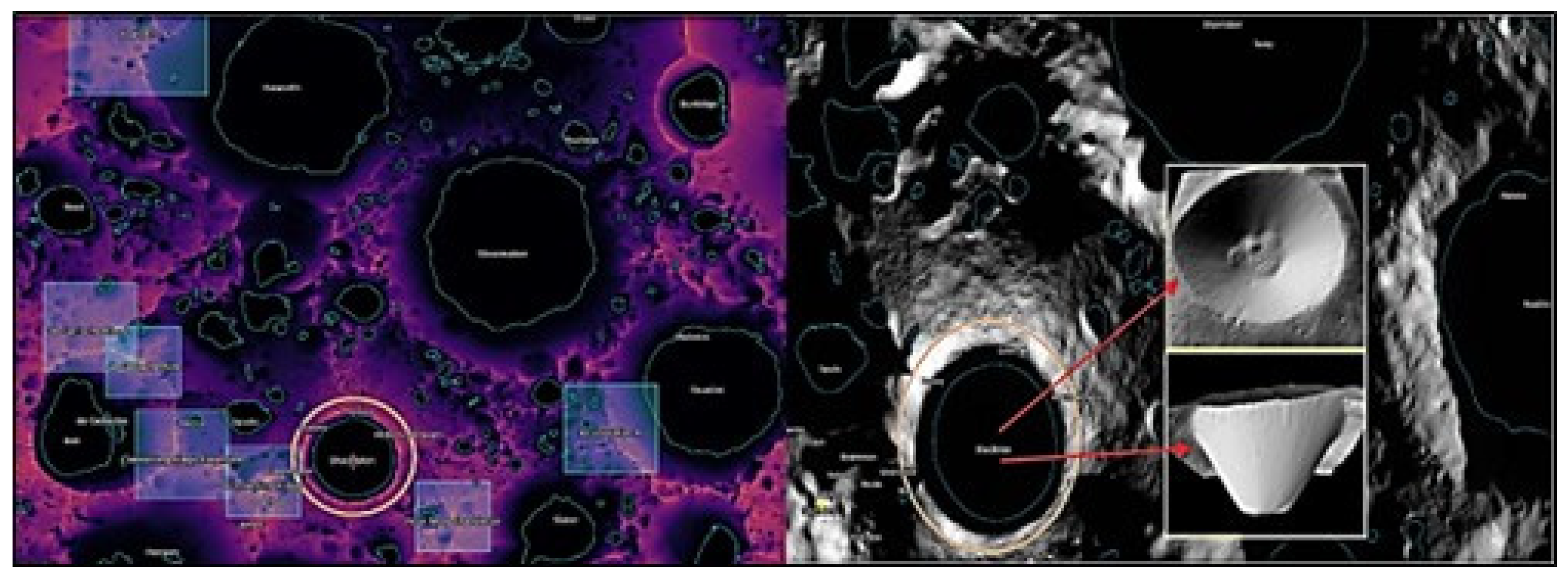
Figure 2.
Simulated Virtual Lunar Environment. ROS simulation of Shackleton Crater's floor (grey areas) with zones for collection (black circles), maintenance (yellow squares), base stations (green squares), processing (blue squares), mining (green areas), and transportation (blue areas). The robot fleet includes 4 orange Explorers, 2 green Excavators, 4 yellow Haulers, and 2 blue Transporters.
Figure 2.
Simulated Virtual Lunar Environment. ROS simulation of Shackleton Crater's floor (grey areas) with zones for collection (black circles), maintenance (yellow squares), base stations (green squares), processing (blue squares), mining (green areas), and transportation (blue areas). The robot fleet includes 4 orange Explorers, 2 green Excavators, 4 yellow Haulers, and 2 blue Transporters.
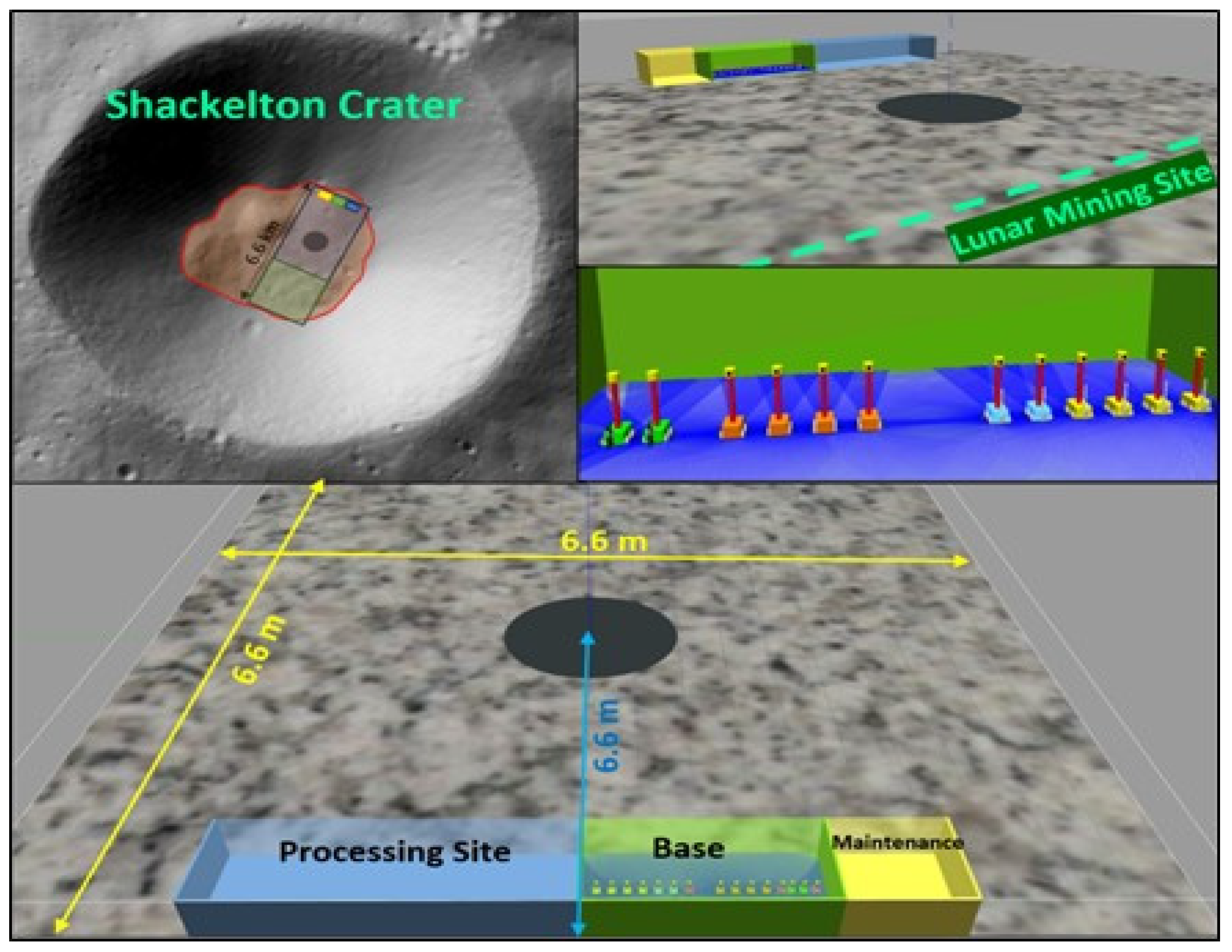
Figure 3.
LUNARMINERS bio-inspired conceptual design.
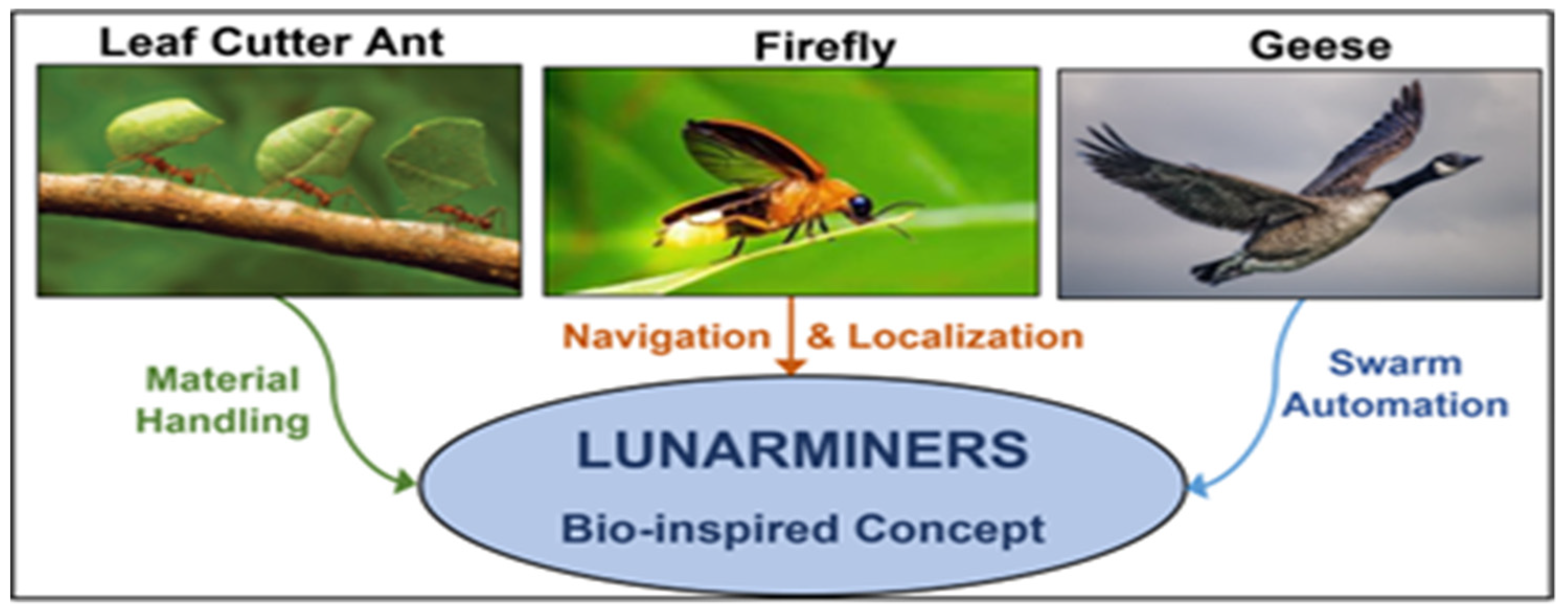
Figure 4.
LUNARMINERS finite state machine.
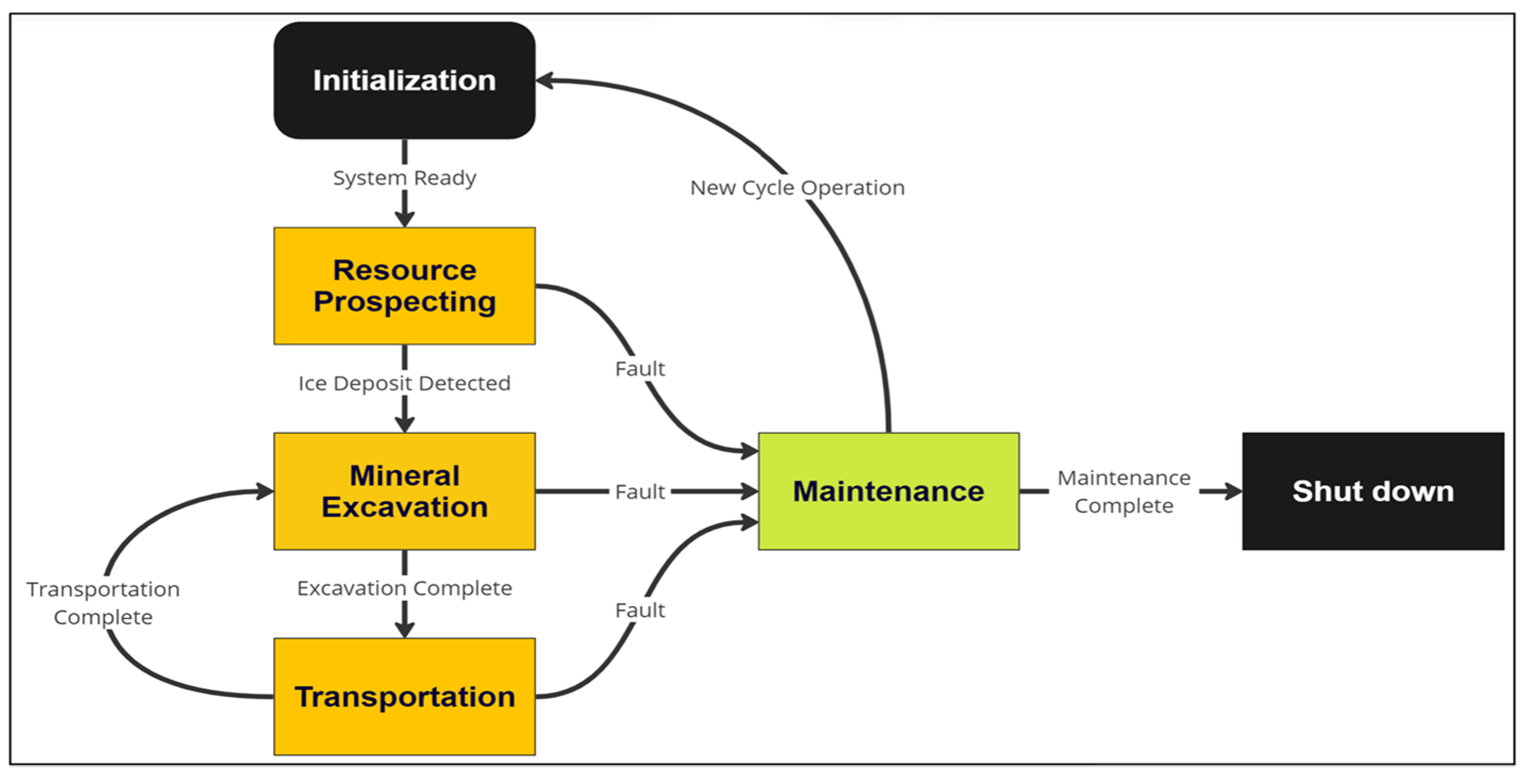
Figure 5.
Strip search and piecewise tracking function for resource prospecting.
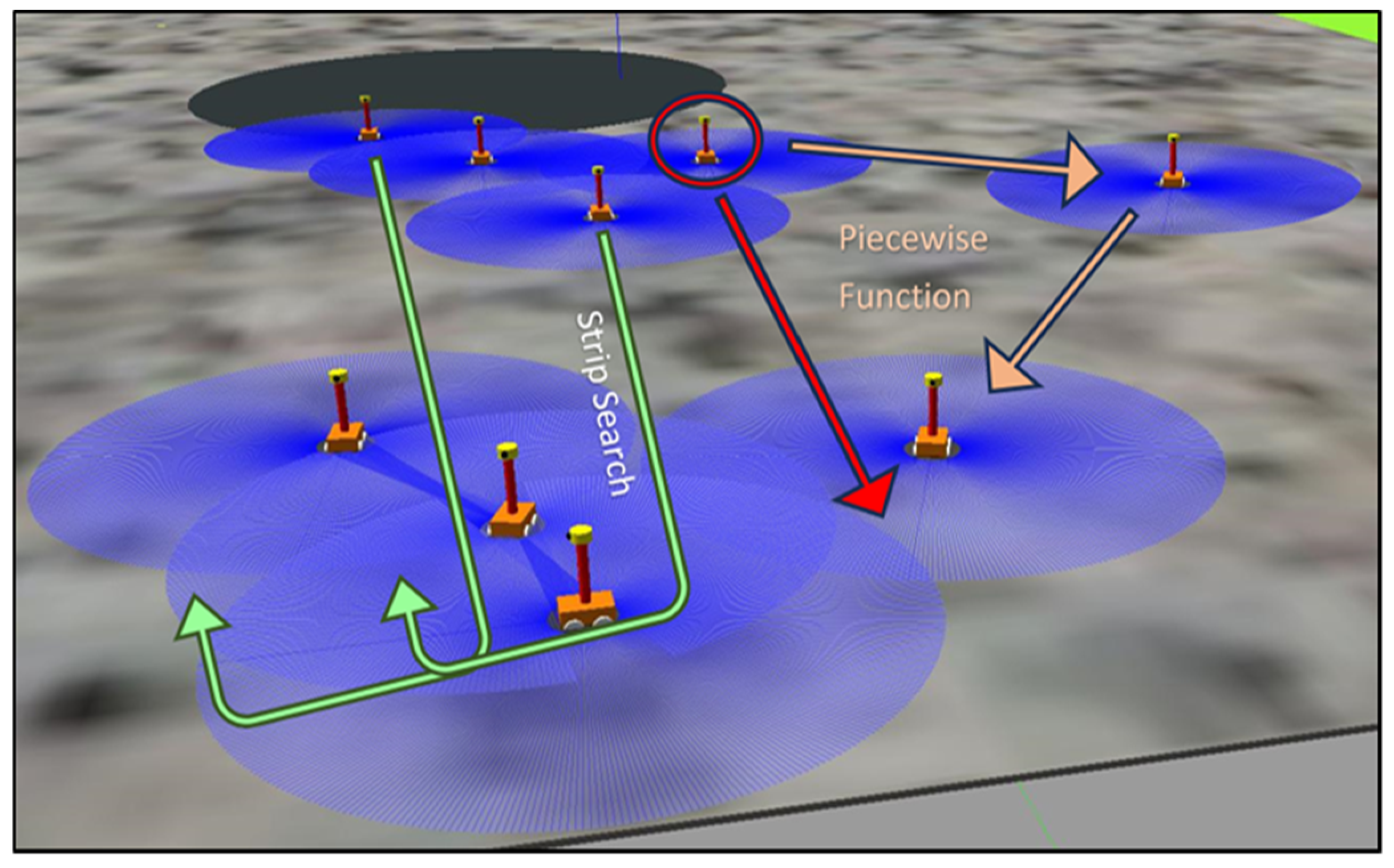
Figure 6.
(a) Fireflies’ bioluminescent technique for site localization and navigation (b) Mining site prioritization for site selection.
Figure 6.
(a) Fireflies’ bioluminescent technique for site localization and navigation (b) Mining site prioritization for site selection.
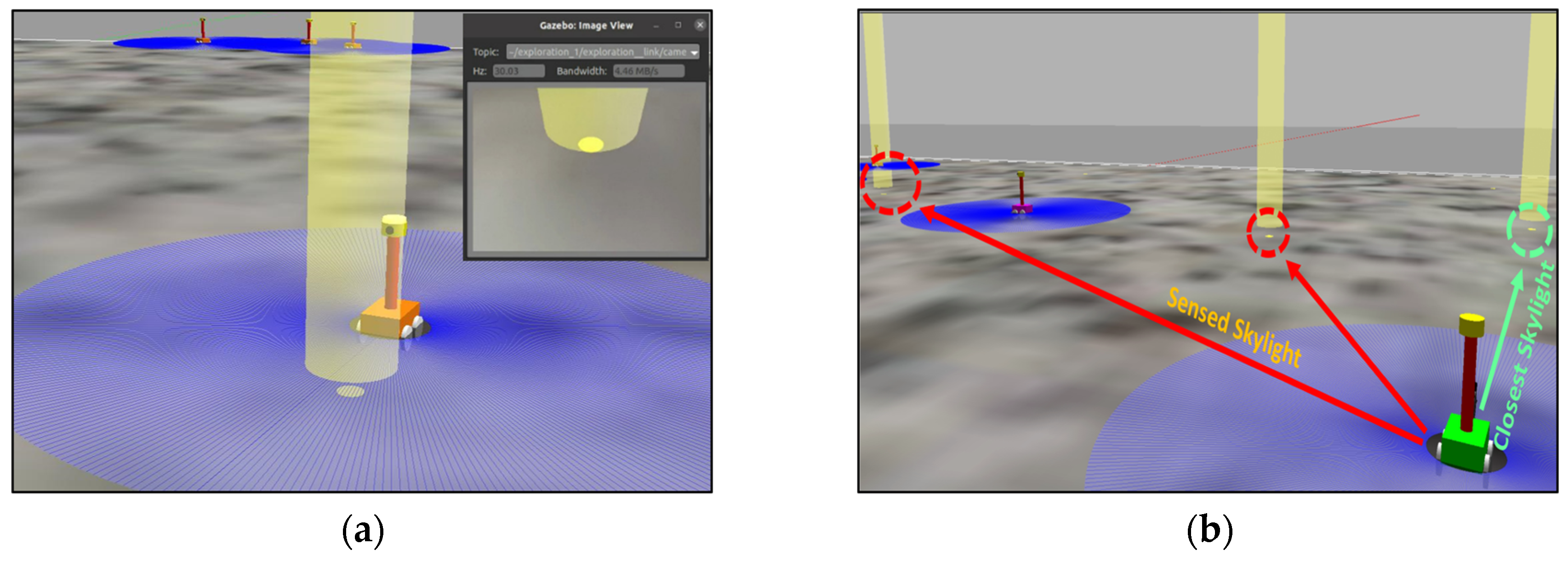
Figure 7.
(a) Terrestrial open-pit mining hauler truck spotting system (b) Material handling process via ant’s harvesting strategy for material extraction and collection stage
Figure 7.
(a) Terrestrial open-pit mining hauler truck spotting system (b) Material handling process via ant’s harvesting strategy for material extraction and collection stage
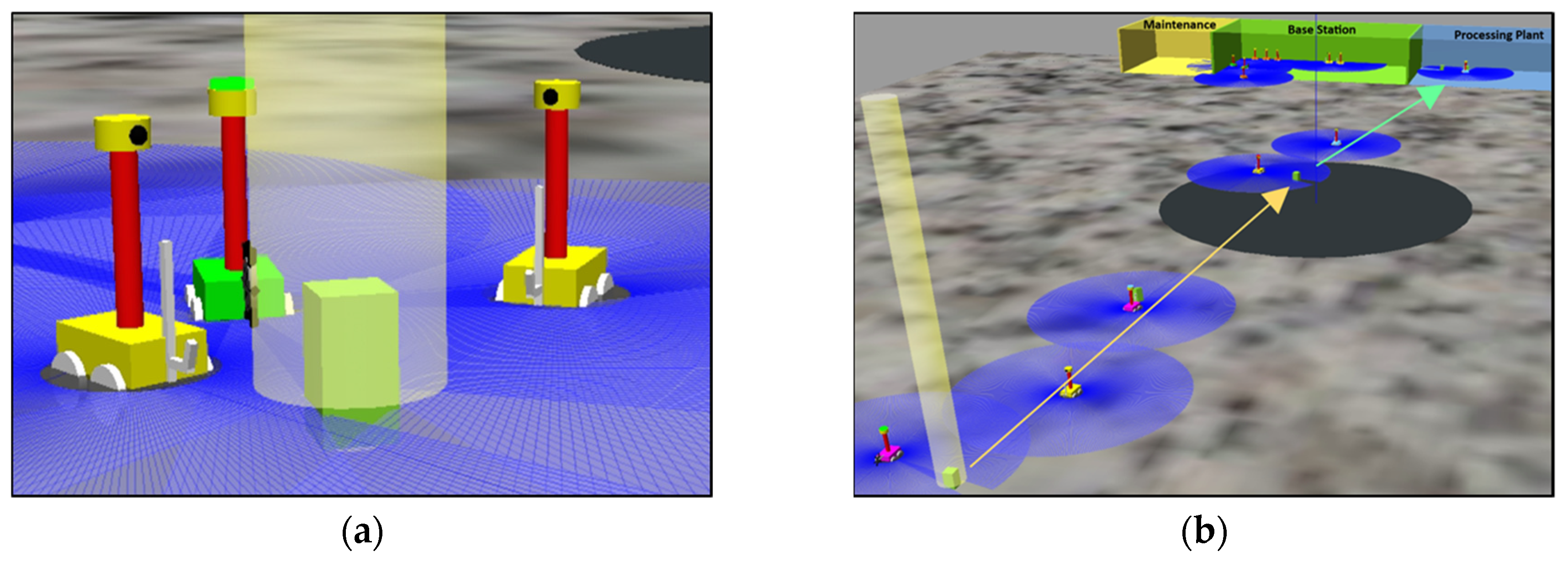
Figure 8.
Dynamic robotic substitution for maintenance and sustainability.
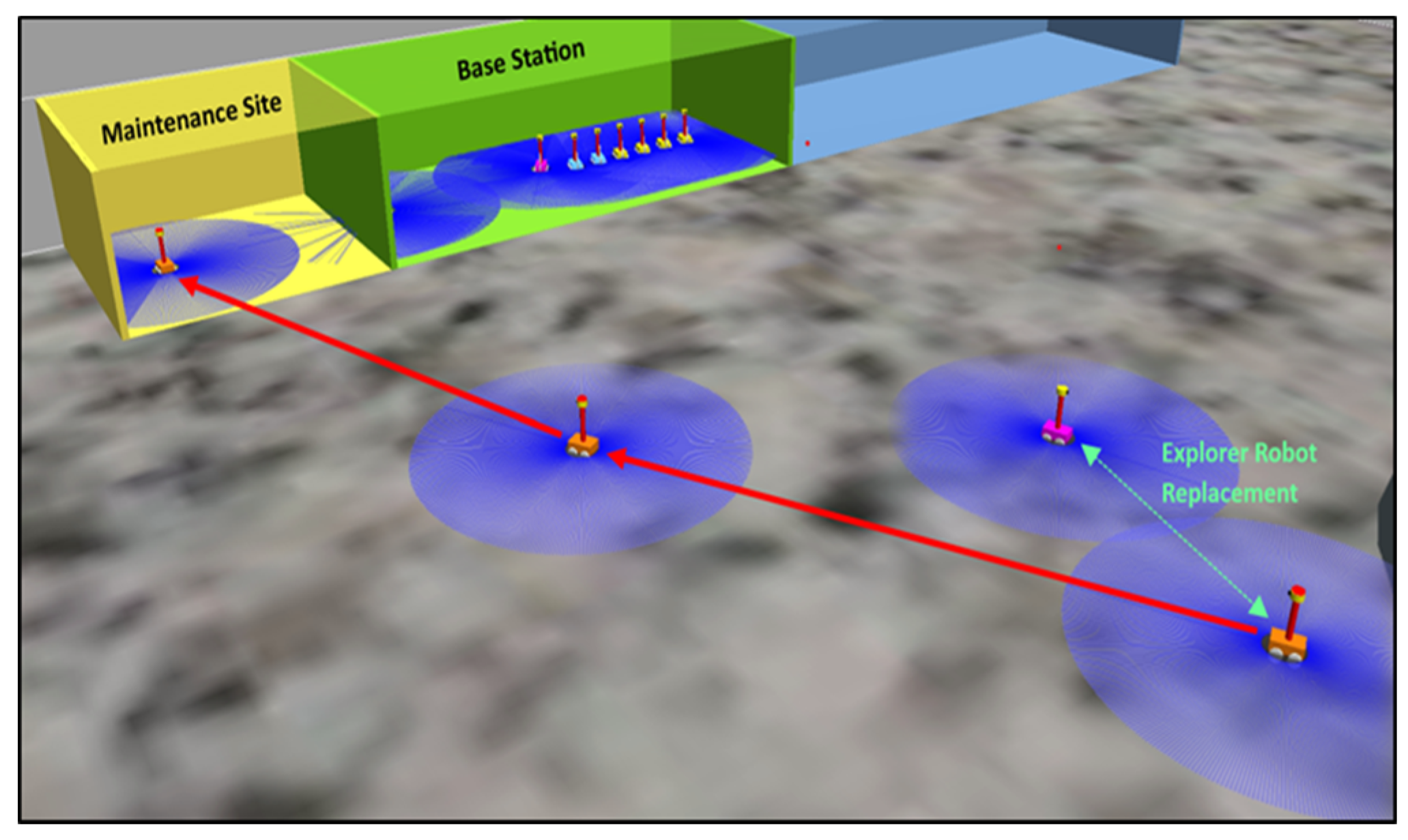
Figure 9.
LUNARMINERS mining stages.
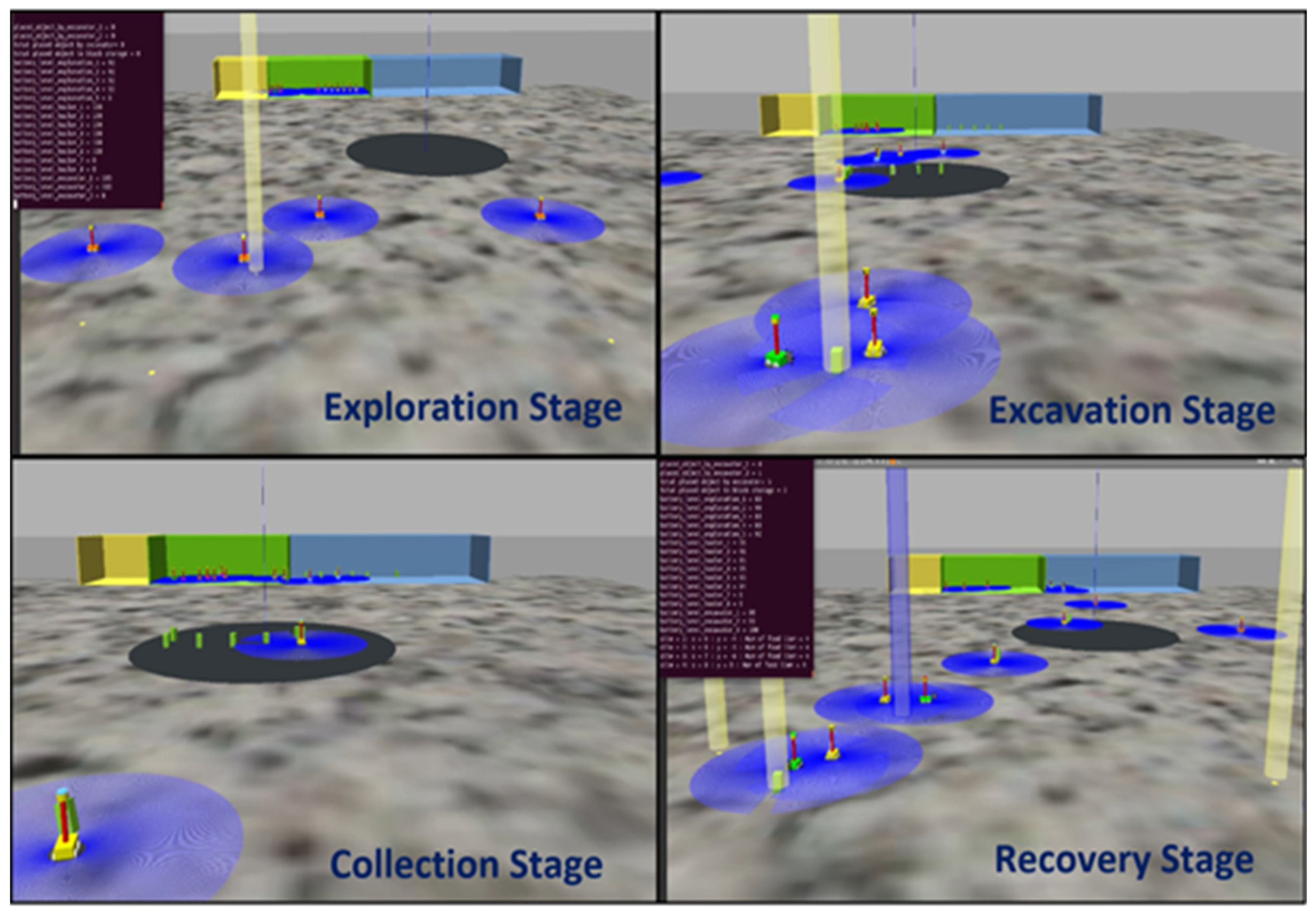
Figure 10.
LUNARMINERS swarm robotic taxonomy.
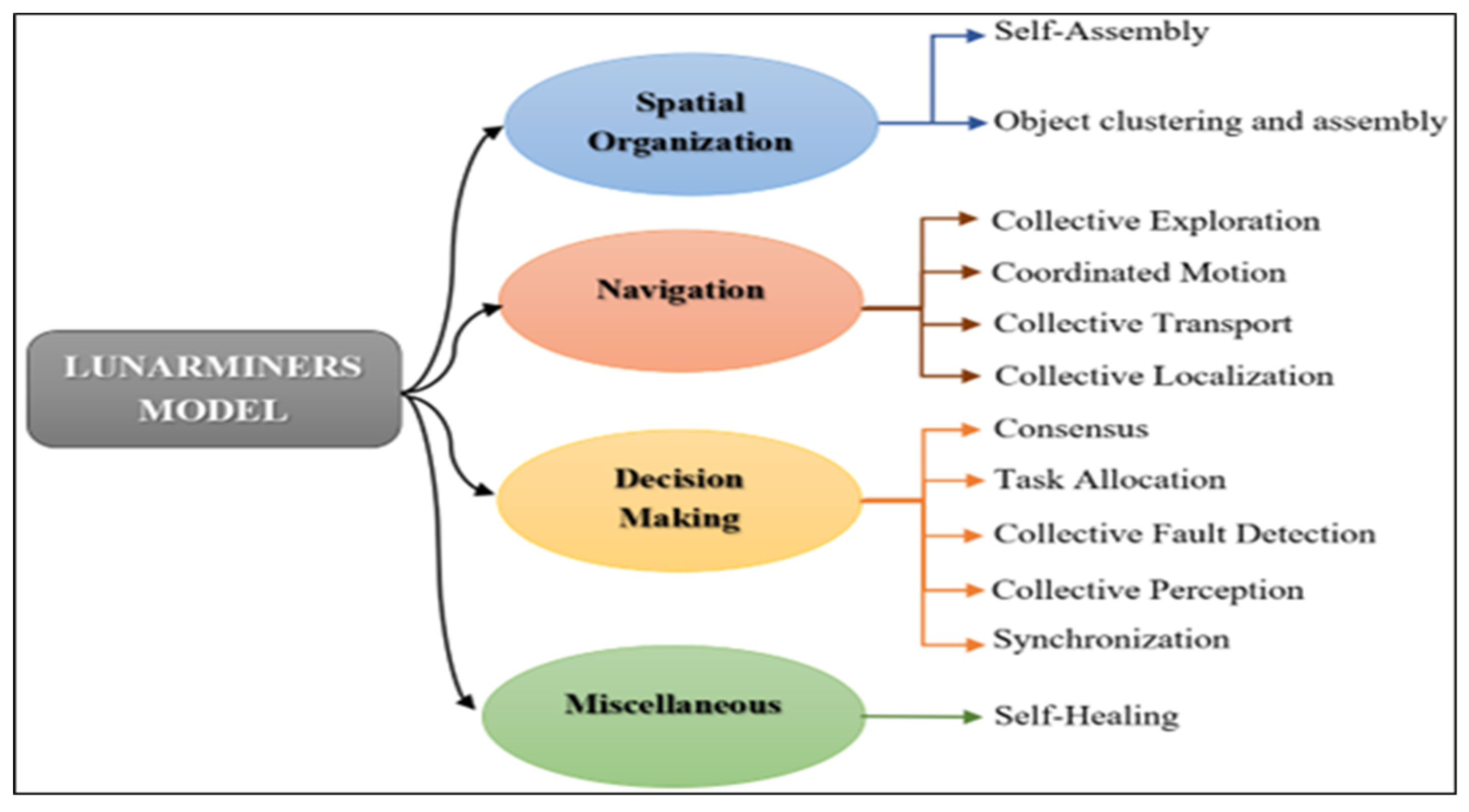

Table 1.
Swarm algorithm integration to mining lifecycle.
| Mining Lifecyle | Nature-inspired Algorithms | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| ACO | PSO | ABC | FA | BA | GWO | SSA | GOA | KH | |
| Mine Exploration & Assessment | |||||||||
| Mine Planning & Design | |||||||||
| Mine Operation & Construction | |||||||||
| Mine Closure & Rehabilitation | |||||||||
Table 2.
LUNARMINER framework Integration to Mining Lifecycle.
| Mining Lifecyle | Nature-inspired Algorithms | ||
|---|---|---|---|
| Ant – Transportation |
Firefly – Navigation |
Geese – Automation |
|
| Mine Exploration & Assessment | |||
| Mine Planning & Design | |||
| Mine Operation & Construction | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



