
Submitted:
18 September 2024
Posted:
19 September 2024
You are already at the latest version
Abstract
Backscatter communication, which transmits information by passively reflecting radio frequency (RF) signals, has become a focal point of interest due to its potential to significantly enhance the energy efficiency of Wireless Power Mobile Edge Computing (WPMEC) networks and extend the operational lifespan of terminal devices. However, there is little research on the integration of user cooperation in WPMEC scenarios within volatile network environments. In this paper, we propose a dynamic task offloading scheme for a Backscatter-assisted WPMEC system, which involves two mobile devices (MDs) and a Hybrid Access Point (HAP) with user cooperation. We formulate the energy efficiency (EE) maximization problem as a stochastic programming problem, considering the randomness of task arrivals and time-varying wireless channels. By leveraging Dinkelbach’s method and stochastic network optimization technique, we transform the problem into a series of deterministic sub-problems for each time slot, and convert the non-convex sub-problem into convex ones. We propose a low-complex EE maximization algorithm to solve the convex problems efficiently. Extensive simulations are conducted to validate the performance of our algorithm under various system parameter settings. Experiment results demonstrate that our algorithm not only outperforms the benchmark algorithms by approximately 23%, but also stabilize all queues within the MEC system.
Keywords:
Mobile edge computing (MEC)
; Wireless Power Transfer (WPT)
; User Cooperation (UC)
; backscatter communication (Backcom)
; Lyapunov optimization
1. Introduction
In recent years, the development of the Internet of Things (IoT), complemented by advancements in communication technologies, has enabled a vast array of mobile devices (MDs)—including cameras, sensors, and wearable devices—to collect and exchange data [1]. This proliferation has given rise to numerous application scenarios that leverage wireless devices, such as autonomous driving, face recognition, Virtual Reality (VR), and e-health [2]. However, these applications often demand substantial computational power and low latency, presenting challenges for MDs, which typically have limited computing capabilities and finite battery life. Mobile Edge Computing (MEC) has risen as a promising solution to these challenges. By offloading computationally intensive tasks to MEC servers, MDs with constrained resources can markedly enhance their computational capacity and reduce latency.
However, wireless devices often have limited battery capacity, which cannot sustain prolonged operation. Consequently, the frequent replacement of MDs’ batteries presents a significant challenge. Wireless Power Transfer (WPT) has emerged as an effective solution to this challenge [3,4]. WPT utilizes a Hybrid Access Point (HAP) to broadcast Radio Frequency (RF) energy that can be harvested by wireless devices. By integrating Energy Harvesting (EH) technology, these devices can convert the captured RF signals into usable electrical energy, thereby recharging their batteries [5]. This harvested energy enables the devices to perform computational tasks either locally or by offloading them to MEC servers. The integration of wireless power and edge computing technologies in Wireless Powered Mobile Edge Computing (WPMEC) networks significantly extends the battery lifespan of wireless devices and markedly enhances their computational capabilities.
In addition to battery limitations, the double-near-far effect can significantly impact network performance, with devices far from the HAP experiencing poor channel conditions [6]. To counteract this issue, a user cooperation (UC) mechanism has been implemented. In this mechanism, devices that are in close proximity to the HAP act as relays, forwarding signals for those located at a greater distance. This strategy not only mitigates the inefficiency of remote nodes offloading tasks directly to the Access Point (AP) but also optimizes the utilization of idle computational resources within the network, thereby enhancing the overall computational efficiency of the system. For example, the work in [7] demonstrates how user cooperation can boost the computational efficiency of a WPMEC system under dynamic channel conditions and varying task arrivals. Additionally, other studies, such as [8,9], have shown that user cooperation can effectively reduce the impact of the double-near-far effect. However, the aforementioned studies have not yet explored the potential of Backscatter technology to improve energy efficiency further.
Backscatter communication (BackCom) has garnered significant attention in recent years due to its innovative approach to wireless communication [10]. In BackCom systems, the transmitter operates in full-duplex mode, functioning in a passive mode. It modulates and reflects the incident signal to the receiver, eliminating the need to generate a carrier frequency, while simultaneously harvesting energy to support its circuitry consumption [11,12]. This approach contrasts with traditional active communication (AC), where the transmitter first harvests energy and then uses this harvested energy to transmit data, adhering to the harvest-then-transmit (HTT) protocol. Generally, AC consumes more energy than BackCom, although it can achieve a higher data transfer rate. The trade-offs between EH and data transfer are inherent in both BackCom and AC.
The motivation behind this study stems from the recognition that while integrating BackCom and AC paradigms has shown promise in enhancing the energy efficiency (EE) of WPMEC systems [8,13], current research is predominantly confined to static, single-time slot scenarios. These studies often assume constant channel conditions and user data arrivals, which contrasts sharply with the dynamic, stochastic nature of real-world MEC networks where data arrivals and channel states are subject to continuous variation. This volatility complicates the prediction and management of network operations, thereby necessitating the development of robust algorithms capable of optimizing long-term energy utilization efficiency and maintaining system queue stability. Addressing these challenges is not only of theoretical interest but also of paramount practical importance, as it directly impacts the sustainability and reliability of MEC services in fluctuating operational environments. Our study, therefore, aims to bridge this gap by proposing an algorithmic framework that can adeptly navigate the complexities of volatile network conditions, ensuring optimal energy efficiency and queue stability in WPMEC networks.
In this paper, we tackle the long-term EE maximization for a Backscatter assisted WPMEC network with user cooperation by jointly optimizing the wireless powered time fraction, BackCom offloading time fraction, AC offloading time fraction, offloading data size and transfer power of MDs. The problem presents significant challenges in two aspects: (1) The randomness of task arrivals and fluctuating wireless channel states impose challenges to achieving optimal EE while ensuring the stability of queue system; (2) The integration of BackCom and AC brings a strong coupling of energy harvest time and task offloading. To address these challenges, we formulate a stochastic optimization problem and propose an efficient, low-complexity algorithm by leveraging techniques such as the Dinkelbach method and the Lyapunov optimization framework. We first transform the sequential decision problem into a deterministic problem for each time slot by leveraging the drift-plus-penalty technique, obtaining a non-convex optimization sub-problem. Then, we convert the non-convex problem into a convex optimization problem by using variable substitution, which allows for efficient solution. We propose a low-complexity dynamic EE maximization algorithm that operates online without requiring prior system information.
The primary contributions of this paper are listed as follows:
- We introduce an innovative dynamic task offloading model to optimize EE for a WPMEC network with integration of BackCom and AC communication under user cooperation, taking into account the randomness of task arrival and time-varying wireless channels. Our model effectively balances the trade-off between energy efficiency and system queues stability, while mitigating the double-near-far effect. Additionally, we explore the use of variable data weighting to motivate proximal users to relay data for distant users, enhancing overall network efficiency.
- We propose an online control algorithm to maximize the EE metric of WPMEC network by determining the time fraction allocation, data offloading, transmission power and the Backscatter reflection coefficients at each time slot. To address the complex coupling of user cooperation and control decisions over time, we employ Dinkelbach’s method and the Lyapunov optimization theory to decouple the stochastic fractional optimization problem into deterministic sub-problems for each time slot, and transforms it into a convex problem, ensuring an efficient and optimal solution.
- We present a rigorous mathematical analysis to demonstrate the performance of our proposed algorithm, that achieves a balanced trade-off between energy efficiency and queue stability within the bounds of . Extensive simulation experiments are conducted to verify the algorithm’s effectiveness and practical applicability. We have systematically evaluated the impact of key control parameters, including variable V, bandwidth, communication gap, and task arrival rates, on the algorithm’s performance.
The remainder of this paper is organized as follows: Section II presents the details of model for Backscatter-assisted WPMEC system. In Section III, we formulate a stochastic programming optimization problem aiming to maximize energy efficiency. Section IV details the application of the Dinkelbach’s method and Lyapunov optimization techniques to simplify the problem, including the algorithm design and theoretical performance analysis. Section V presents an extensive simulation-based evaluation of the proposed algorithm’s performance. Finally, we conclude the paper and suggest directions for future research in Section VI.
1.1. Related Work
The combination of WPT with MEC networks, as an efficient solution for wireless devices to augment their energy and computational capacities, has been extensively studied by recent researches [14,15,16,17]. Ernest and Madhukumar [18] proposed an energy efficiency maximization algorithm based on multi-agent deep reinforcement learning for a MEC-supported vehicular network, with jointly considering transmission and computation latencies outperforming existing strategies. Zhang et al. [19] proposed an algorithm optimizing charging time and data offloading rates for WPT-MEC IoT sensor networks to improve computational rates in different scenarios. Li et al. [5] studied the system latency minimization problem for an Intelligent Reflecting Surfaces (IRS)-assisted multi-ID MEC system, and presented a hybrid multiple access scheme and optimization framework combined with Frequency Division Multiple Access (FDMA) and Non-Orthogonal Multiple Access (NOMA) technologies. Additionally, in [20], the authors introduced a deep reinforcement learning-based approach for WPT-aided mobile edge computing to dynamically adapt to real-time changes, make swift decisions, and optimize both task offloading and energy resource allocation. Our previous research [7] introduced an online control algorithm for dynamic task offloading in WPMEC networks under dynamic network conditions, designed to maximize long-term system energy efficiency. However, the aforementioned studies did not take into account the use of Backscatter technique to further enhance the energy utilization efficiency of wireless power transfer.
To mitigate the double-near-far effect and fully utilize available resources, many researchers employ a user cooperation mechanism [7,9,21,22,23]. He et al. [22] presented a user cooperation scheme, aiming to maximize the network’s total throughput by jointly optimizing the local computing frequency, transmit power, task distribution, and time allocation. Wang et al. [21] introduced a user cooperation mechanism for a NOMA assisted WPT-MEC network, designed a iterative-based optimal algorithm to minimize overall system energy consumption by leveraging Lagrangian method. Zhang et al. [24] presents a hierarchical reinforcement learning-based approach for joint caching and resource allocation in a cooperative mobile-edge computing system, aiming to optimize resource utilization and balance server loads through service caching and workload offloading decisions. Sun et al. [25] proposed an iterative optimization algorithm for minimizing end-to-end latency in an MEC network supporting IoT applications, by jointly optimizing user association and resource allocation in a three-phase operation protocol. Su et al. [9] explored optimizing the energy beamforming and resource allocation to enhance computation efficiency for WPMEC system with the integration of user cooperation and NOMA, taking into account non-linear energy harvesting model.
In recent years, the integration of BackCom and active communication(AC) has emerged as an effective approach to enhance network energy efficiency, leveraging the unique characteristics of Backscatter technology to balance transmission rates and energy consumption, thereby significantly improving the system’s overall performance [8,26,27,28,29]. Lyu et al. [30] introduces a hybrid HTT and BackCom framework for cognitive wireless powered IoT networks, optimizing time allocation and mode combination to maximize system throughput. Ye et al. [27] introduced a bisection-based iterative algorithm for minimizing data offloading and computing delays in a WPMEC network with hybrid BackCom and AC for IoT networks. Shi et al. [31] proposed a scheme for maximizing the weighted sum of computation bits in a Backscatter-assisted WPMEC network, considering a practical non-linear EH model with hybrid HTT and Backscatter communications. Wu and He [26] proposed an efficient iterative algorithm for EE maximization in a multi-access WPMEC system with the help of a relay. Lin et al. [32] presents an optimization framework for a BackCom NOMA system, aiming to maximize the sum uplink rate by optimizing reflection coefficients and establishing association policies between base stations and backscatter devices. Fu et al. [33] addressed the energy efficiency fairness among IoT nodes in a UAV-enabled WPMEC network with integrated BackCom and AC, proposed an optimization framework that maximizes the worst-case IoT node’s energy efficiency by jointly optimizing UAV transmit power and trajectory, IoT nodes’ BackCom and AC parameters, and local computing configurations. However, the aforementioned studies primarily focus on optimizing a single time slot and do not account for the dynamic fluctuations inherent in MEC network environments.
Different from the above research, this paper addresses the problem of hybrid communication modes (e.g., BackCom and AC) and user cooperation for EE maximization in the volatile WPMEC network, without any information about the future. Compared to [8], our approach considers both nodes capable of processing their own incoming data simultaneously, and we introduce weighted incentives to motivate proximal nodes to assist distant nodes in offloading computational tasks. We account for dynamic factors, including random task arrivals and fluctuating wireless channel states, the prior knowledge of which is difficult to pinpoint accurately, making task offloading and resource allocation significantly challenging. Moreover, the coupling between dynamic battery levels and wireless charging time further complicates the problem.
2. System Model
We consider a typical WPTMEC network that comprises two MDs and a HAP, depicted as Figure 1. The HAP directly connects with an MEC server to provide computation task offloading services and equipped with an RF energy transmitter to support wireless power to MDs. , one of the MDs, is located at a significant distance from the HAP. In contrast, , the second MD, is in a more advantageous position due to its proximity to the HAP and acts as an intermediary. Both and are equipped with both a BackCom circuit and an AC circuit, enabling them to select between backscatter and active communication modes.
The WPMEC system employs a Time Division Duplex (TDD) method to alternate between communication and energy harvesting phases. Time Division Multiple Access (TDMA) technique is utilized to avoid signal interference [34]. The WPMEC system operates in a discrete time-slot mode over a time horizon period, with each time slot set to last T seconds. As depicted in Figure 2, each time slot is further divided into five time fractions dedicated to energy harvesting and task processing for the different MDs. At the start of each time slot, both MDs initiate the capture of RF signals transmitted by the HAP for the purpose of energy harvesting. A partial offloading strategy is adopted, which permits the flexible offloading of a portion or the complete set of computational data to a remote device. Owing to the terrible channel conditions between the and the HAP, along with the compounded near-far effect, directly offloading tasks to HAP is infeasible for the , such that the offloads tasks to the , and the then forwards them to HAP.
Both MDs are equipped with BackCom and AC circuits for task offloading during the communication process. At each time slot, the BackCom mode firstly is used for tasks offloading. During intervals and , computation tasks data from the remote device are offloaded to , which then offloads these task data to the HAP. Similarly, during intervals and , the offloading process is carried out using the AC mode. In the final time allocation , because the computation result data is typically small, this time slot can be considered negligible and ignored.
The primary symbols and definitions used are listed in Table 1.
2.1. Energy Harvesting Model
The HAP, equipped with a reliable power source, is responsible for the transmission of RF energy to the MDs dispersed within its service area. In the initial phase, the HAP broadcasts RF signals to all MDs for a duration of . Subsequently, offloads tasks to during the time fraction using BackCom, while can simultaneously harvest energy. In a similar fashion, offloads tasks to the HAP during the time fraction using BackCom, and harvests energy. Let and denote the harvested energy of and in the first phase, respectively. Thus, we have [8]
and
where represents the energy conversion efficiency, denotes the RF transmission power of the HAP. and represent the channel gains from the HAP to and respectively, which remain constant within the same time slot and vary across different time slots.
2.2. Dynamic Queues Model
To simulate the dynamic changes in user task data arrival and node battery levels, we have introduced the dynamic queuing model. Both and maintain a buffer queue for caching incoming task data, which is processed on a first-in, first-out (FIFO) principle. Let denote the queue lengths of and at time slot t, respectively, which can be observed at the beginning of the time slot. The backlog of task queue updates as follows:
where represents the raw task data arriving at the data queues during time slot t. We assume that the task arrival is an arbitrary process over time, there is a upper-bound by . , represent the offloading task data and the local processing data at , respectively.
Similarly, we assume that MD nodes are equipped with batteries and maintain a battery energy level queue. The energy captured through wireless charging is first stored in the batteries, and the battery power is consumed for local computing and task offloading. Concurrently, the battery energy level has an upper limit and a lower limit . The level is essential to sustain the basic operations of the MD IoT system [34]. Therefore, the battery energy of the MD nodes dynamically changes according to the following equation
where and represent the energy consumption for local computing and task offloading, respectively. The total energy harvested by at slot t is given by , where is as previously defined, and denotes the energy harvested during BackCom data transmission.
2.3. Local Computing Model
Upon task arrival at a node, local processing is prioritized; task offloading is considered only when local processing is not feasible. Since each MD is equipped with a battery, the maximum duration for local computation is denoted by T. Let and denote the local CPU frequencies of and , and denote the CPU cycles required to process one bit of task at the and , respectively. Furthermore, the maximum amount of local computation data at cannot exceed the current backlog of . Thus, the amount of locally computed task data can be expressed as
and the corresponding energy consumption is [8]
where denotes the computing energy efficiency parameter of [8]. The expression represents the power consumption used for processing all current task data in queue . Note that if the local processing capacity of exceeds the current backlog of , then the amount of task for local computing is and the processing time is , so we can derive the energy consumption for local computing as ; otherwise, the amount of task is , with the corresponding energy consumption being as in [14].
2.4. Task Offloading Model
2.4.1. BackCom Data Transmission
During , offloads tasks to by BackCom. Let denote the reflection coefficient of , where represents the fraction of the received signal that is utilized as a carrier for data transfer, and the remaining fraction is allocated for energy harvesting [35]. Let represent the channel gain between and . According to Shannon’s theorem [36], the amount of tasks offloaded from to satisfies [8]
 where represents the performance gap reflecting real modulation [11], is the noise power. The corresponding energy consumption by circuit is
where represents the performance gap reflecting real modulation [11], is the noise power. The corresponding energy consumption by circuit is
After receiving the tasks offloaded from , will relay a portion of these tasks to the HAP as a relay. Note that will also offload its own tasks to the HAP. At time , the task data transmitted by through BackCom is constrained as follows
 where is the reflection coefficient of the BackCom at . represents the channel gain from the HAP to the at time slot t, and denotes the channel gain from the to the HAP at time slot t. The corresponding energy consumption is
where is the reflection coefficient of the BackCom at . represents the channel gain from the HAP to the at time slot t, and denotes the channel gain from the to the HAP at time slot t. The corresponding energy consumption is
2.4.2. AC Data Transmission
After the BackCom offloading is completed, the AC mode offloading is initiated, which proceeds through an offloading process similar to that of BackCom. The AC mode can achieve a higher data transmission rate, but it is incapable of energy harvesting during the offloading phase. During the time fraction , the upper limit of the amount of task from offloading to can be expressed as
 where represents the transmit power allocated to AC at [8], is the noise power and represents the channel gain from and . The corresponding AC offloading energy consumption is
where represents the transmit power allocated to AC at [8], is the noise power and represents the channel gain from and . The corresponding AC offloading energy consumption is
The upper limit of the amount task offloading from to HAP by AC during is given by
 where
denotes the transmit power of the through AC. Let denote the circuit power of through AC. The energy consumed for task offloading AC at in slot t is
where
denotes the transmit power of the through AC. Let denote the circuit power of through AC. The energy consumed for task offloading AC at in slot t is
2.5. Network Stability and Utility
For a dynamically changing WPMEC network system, maintaining system stability is crucial due to the stochastic arrival of tasks and the dynamic changes in the channel environment [37]. Therefore, we first provide the definition of system queue stability as follows.
Definition 1.
(Queue Stability): A discrete task data queue is strong stable [37] if it satisfies
The energy efficiency of WPMEC system is defined as the ratio of the sum of weighted processed tasks to the total energy consumption. Specifically, the total accomplished tasks and the total energy consumption of WPMEC network at slot t can be represented as follows, respectively
and
where and represent the task weights of and respectively. represent the total offloading task data at , and represent the total energy consumption of offloading task at .
Definition 2.
(Utility-Energy Efficiency ): The network utility is defined as the time-averaged amount of computation data achieved per unit of energy consumed [38]. This is expressed as the ratio of the long-term processed data to the total energy consumption, as follows:
3. Problem Formulation
In this paper, we aim to design a dynamic offloading algorithm to maximize the subject to constraints of the system queue stability, by making decisions on time allocation , power allocation , reflection coefficients and the amount of offloaded tasks at each time slot t. Simultaneously, our algorithm should ensure the stability of the system network when faced with randomly arriving task loads and dynamically changing wireless channel conditions. By denoting , , , and the maximization of for a Backscatter-assisted WPMEC with user cooperation can be formulated as the following problem (P0):
where constraint (20b) ensures that the total offloading time in each slot does not exceed the available time. Constraint (20c) maintains the battery levels within the allowable range for both mobile devices. Constraints (20d) guarantee the stability of data queues. Constraint (20e) indicates that the amount of processed task in the current time slot must not exceed the current queue length. Constraint (20f) guarantees that tasks offloaded by to can be processed within the same slot. Constraints in (20g) denote the maximum offloading data depending on the channel condition. The problem is a fractional stochastic programming issue, which presents significant challenges due to several aspects: (1) The randomness of task arrivals, the fluctuating wireless channel state, and the dynamic battery level introduce stochastic factors to the optimization challenge; (2) The temporal coupling in the time fraction and energy consumption exhibited by BackCom and AC poses a considerable challenge in determining the allocation of offloading time.
Due to the fractional nature of the objective function of P0, traditional optimization techniques aren’t directly applicable, such that we leverage Dinkelbach’s method [39] to transform the problem into a more tractable one. Let denote the optimal value of , we derive the following Theorem 1.
Theorem 1.
The optimal is achieved if and only if
Proof.
For brevity, here we omit the proof details. See Theorem 1 in [38]. □
Since is unknown during the solution process, (20) is still infeasible to tackle. In accordance with the methodology employed in [38], we introduce a new parameter and define it as
We set at the beginning of the problem. Replacing in (20), the problem P1 can be transformed into
where is a given parameter that should be updated through the resolution process. It should be noted that obtained by (22) will get closer to as time goes by [38]. Therefore, this transformation is reasonable and has the same optimal solution as P0. While problem P1 is more manageable than problem P0, it still faces several challenges The constraints (20c) and (20d), along with the equation (4), result in an interdependence of battery levels across various time slots throughout the period, which means that the current energy consumption affects future battery levels. Moreover, the unpredictability of the stochastic task arrivals and the fluctuating channel states add another complexity to the problem. The difficulty in accurately forecasting these elements leads to an inherent temporal coupling in the decision-making process.
4. Algorithm Design
First, to decouple the battery energy level across time slots and ensure the stability of the task queue, we leverage the Lyapunov network optimization technique to eliminate the long-term average constraints.
4.1. Lyapunov Optimization Formulation
To simplify the battery energy queue at and , we introduce two virtual queues for battery level: . In order to optimize the task queue and the energy queue simultaneously, we define a combined queue vector . Following Lyapunov optimization framework, we obtain the quadratic Lyapunov function and the Lyapunov drift [37] as
and
According to the Lyapunov optimization theory [37], the one slot drift-plus-penalty expression can be expressed as
where control parameter V is a positive value, used to balance the trade-off between network EE and network stability. Actually, V acts as a weighting factor of the cost optimality in the drift-plus-penalty expression. Increasing the value of V causes the algorithm to focus more on network EE, which may also result in a larger backlog of the task queue. We derive an upper bound of as Lemma 1.
Lemma 1.
For any controlstrategy at each time slot t, the one slot Lyapunov drift-plus-penalty is bounded by the following inequality:
where B is a constant value, which satisfies :
Proof.
By using the inequality , and combining the definition of task queues and battery energy queues Eq. (3)-(4), we have
Combining the above inequalities (29) and (30), we obtain the upper bound of the Lyapunov drift-plus-penalty. □
According to the drift-plus-penalty technique in Lyapunov optimization theory, we seek to greedily minimize the upper bound of at each time slot t. Notably the value of , and can be observed at the beginning of each time slot t. By eliminating the constant term in the RHS (right hand side) of (27), the problem P1 can be transformed into a one-time slot problem as
Due to the coupling between the parameters , and , the proposed problem P2.1 is still a non-convex problem. To decouple these parameters, we introduce auxiliary variables , , , . Then the problem P2.1 can be simplified as:
where , , , , , , , .
Lemma 2.
P2.2 is a convex optimization problem, which can be efficiently solved by convex optimization tools, such as CVX [40].
Proof.
In problem (P2.2), the objective function (32a) is linear with respect to all variables. Constraints (32b)-(32e) are all linear inequality constraints. What’s more, for constraint (32f), is the perspective of which is concave with respect to . Since the perspective operation preserves convexity [41], is concave with and and (32f) is a convex constraint. For the same reason, (32g)-(32i) are all convex constraints. Thus, P2.2 is a convex problem. □
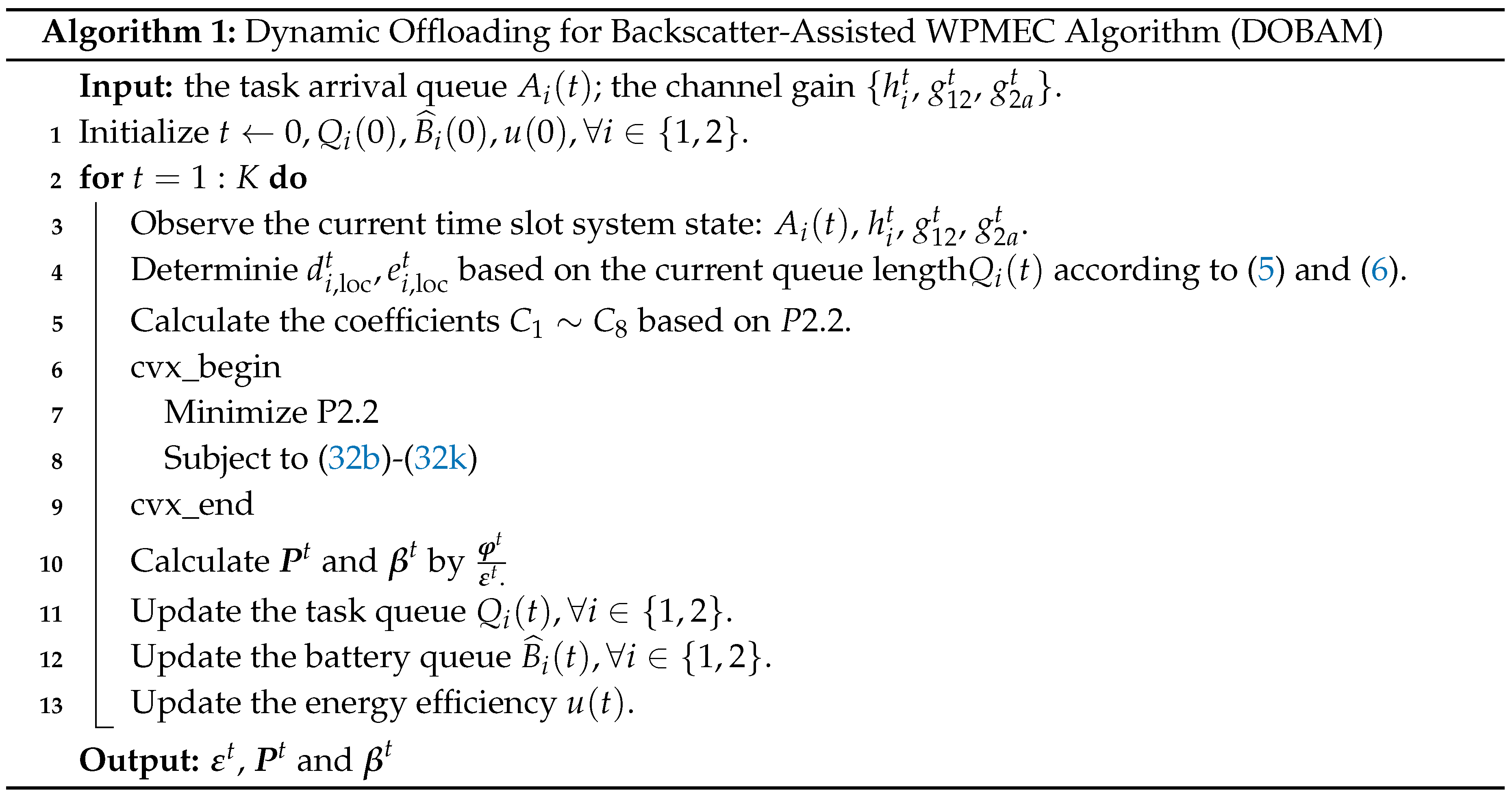
According to Lemma 2, at each time slot, we only need to solve a convex problem P2.2, which contains a small number of variables. By doing so, we can achieve optimal long-term average EE, even without knowledge of future system information. Our proposed algorithm, the Dynamic Offloading for Backscatter-Assisted WPMEC Algorithm (DOBAM), is summarized as Algorithm 1.
 |
4.2. Algorithm Performance Analysis
At each time slot, our algorithm engages in the resolution of a straightforward convex optimization problem, denoted as P2.2, encompassing a manageable set of 13 decision variables. This problem is adeptly addressed through the application of well-established optimization techniques, such as the interior point method. Characterized by a computational complexity of approximately , where n is the number of decision variables, this approach ensures efficiency even for problems of considerable size.
In the following part, we analyze that the proposed scheme can achieve the optimal long-term time-average solution. First, we give some assumptions as follows:
then, we can obtain that the expectation can also converge the same solutions
Lemma 3.
Based on (36)-(38), we have
To start with, we give the existence of the optimal solution based on the current queue status.
Lemma 4.
If the problem (P1) is feasible, there exists a policy that satisfies the following conditions :
where * represents the value under optimal solution.
Proof.
See the parts 4 and prat 5 of [37].
□
Theorem 2.
The optimal long-average utility function obtained by P1 is limited by a lower bound that is independent with the time space. The following solutions can be achieved by the algorithm,
- 1.
- 2.
- All queues , , are mean rate stable, and thus the constraints are satisfied.
Proof.
For any , let us consider the policy and queue state in (41)–(43). Since the result values are independent of queue status , we have
By integrating these results to (27) and making , we have
Note that is a constant value, which is independent of the current queue status . Utilizing the iterated expectation and obtaining the sum of the above inequality over time , we have
Dividing both sides of (44) by , utilizing the Jensens inequality and the fact that
Furthermore, letting , we have
considering , we have
Furthermore we obtain
□
Theorem 3.
Let be the upper bound of , the time-average sum rate of queue length is bounded by
Proof.
By taking iterated expectation and using telescoping sums over , we have
Dividing both sides of (54) by , taking , rearranging terms yield
□
Theorems 2 and 3 provide a rigorous mathematical performance analysis for our proposed algorithm. They demonstrate that the time-average scales as , while the queue length increases at a rate of . The WPMEC system EE can be improved by adjusting the value of V. However, the time-average task queue Q increases as V grows. Therefore, we can tune V to achieve a trade-off between network EE and task queue length. According to Little’s Law [37], the latency is proportional to the time-average task queue length. This also implies that our proposed algorithm can achieve a trade-off between and latency. This balance is critical in many real-world applications where both efficiency and latency are critical.
5. Simulation Results
In this section, we evaluate the performance of our proposed algorithm for a Backscatter-assisted WPMEC system with user cooperation through extensive numerical simulation. The experiments are conducted on a high-performance platform equipped with a 2.10 GHz Intel(R) Xeon(R) Silver 4116 CPU and four GeForce RTX 2080 Ti GPUs, ensuring efficient simulation execution. We employed the free-space path loss model to simulate signal propagation, where the average channel gain is calculated by the following formula [42]:
where (antenna gain), MHz (carrier frequency), (path loss exponent), and represents the distance between nodes (in meters).
The dynamic channel gains for WPT and task offloading, following the Rayleigh fading model, are represented by the vector . In the model, the channel fading factors all follow an exponential distribution with an expectation of 1, simulating the natural variability of wireless channels. For the sake of model simplification, we assume that the vector of fading factors remains constant at within each time slot, thereby considering the channel gain to be static during that slot.
At each time slot t, the expected arrival rates of computational tasks satisfy . It is assumed that follow an exponential distribution, where the rate parameters and correspond to 1.2 and 1.5, respectively. The main source code is available online at https://github.com/Toxic-Gulu/bac-with-ac. Other simulation parameters are detailed in Table 2.
To comprehensively evaluate the performance of our algorithm, we conducted comparative simulations with three representative benchmarks as follows:
(1) UC with the AC scheme (UAC) [43]: In the WPMEC system, task offloading is facilitated through user collaboration, where and communicate exclusively via the AC mode, without the integration of Backscatter modules. This approach only leverages the AC communication model for data transmission.
(2) UC with the BackCom scheme (UBC) [8]: The WPMEC network employs a collaborative approach among users, with inter-user communication solely relying on the Backscatter technique. Specifically, the HAP continuously broadcasts RF energy to the users throughout each time slot, resulting in the highest energy expenditure for the HAP due to its non-stop energy emission.
(3) Without UC With Integrated BackCom and AC scheme (BC+AC) [44]: The WPMEC network forgoes user collaboration, with and establishing direct communication links with the HAP. In this configuration, and are autonomous, eschewing collaborative interactions. Furthermore, each device is integrated with a Backscatter module, enabling the utilization of both BackCom and AC for their communication needs.
(4) Random Offloading Scheme (ROS) : The WPMEC network employs a typical task offloading approach where and independently offload a random subset of their tasks to the HAP. There is no collaboration between the two nodes in terms of communication. Importantly, both nodes are not integrated with Backscatter modules, and they exclusively utilize AC communication.
To ensure a fair comparison, all baseline algorithms are implemented utilizing the Lyapunov optimization framework, which is designed to maintain system stability.
Figure 3 demonstrates the performance comparison of EE under different schemes, with parameters set as , dB, and MHz. It can be observed that our proposed algorithm performs the best in terms of EE, followed by the UBC, then the UAC, the BC+AC ranking fourth, and the ROS method performing the worst. Compared to the other four schemes, our proposed algorithm has improved the EE by 23%, 38%, 48% and 64%, respectively. This superior performance highlights the advantage of integrating both BackCom and AC. The scheme of UBC, suffers from limited transmission capability when is small, leading to poor performance. Although the UAC can transmit sufficient data, its high circuit power consumption results in it ranking third. Due to the poor channel conditions of remote users, the BC+AC, as well as the ROS method, also have lower energy efficiency. This indicates that even with the integration of BackCom and AC, poor channel conditions between and HAP may still limit energy harvesting and task offloading. This further emphasizes the importance of user cooperation in enhancing the performance of remote users.
Figure 4 illustrates the impact of controlling the performance gap on EE. The EE for the other four schemes improve with an increase in , contrasting with the UAC and ROS scheme’s stable EE. Our proposed scheme consistently delivers the best system performance and the ROS method performing the worst. With -17dB, the UBC scheme outperforms the UAC scheme in EE, prompting the system to favor the BackCom mode. Upon reaching a higher threshold, the UAC scheme’s EE matches that of our proposed scheme, leading to its predominance use by users. Conversely, when -21dB, our scheme defaults to the AC mode. The BC+AC and the ROS scheme experience the least performance gains due to suboptimal channel conditions. Overall, the proposed scheme outshines others in flexibility and adaptability, adeptly tuning to varying levels for optimal EE.
Figure 5 demonstrates the impact of network bandwidth on the performance under different schemes, with the time slot set to 2000. As shown in Figure 5, within the bandwidth range of [1.00, 1.45] × Hz, the EE of all schemes increases with the expansion of bandwidth. This is attributed to the increased bandwidth allows more tasks to be transmitted to the edge server for processing using edge computing resources. Our proposed scheme consistently outperforms other schemes across the different bandwidth scenarios, especially as the bandwidth approaches 1.45MHz. At this point, the advantage in energy efficiency becomes markedly evident, substantially outperforming other baseline algorithms. This not only showcases the high adaptability of our scheme in managing bandwidth but also underscores its effectiveness in utilizing network resources in high-bandwidth scenarios, thereby maximizing energy efficiency.
In Figure 6, we evaluate the system performance of various algorithms under different weight configurations, where the weight varies in the range [0, 3], with and . As increases, the EE of all schemes generally declines because a higher implies that tasks offloading from receive more resources at the expense of overall EE. Our algorithm consistently performs the best across all weight settings and the ROS algorithm exhibits the poorest performance among the evaluated approaches. Specifically, at , our algorithm achieves an EE improvement of 23%, 38%, 46% and 55% over other algorithms. This demonstrates that our algorithm can more effectively leverage the advantages of the UC scheme, combined with BackCom and AC. Additionally, Figure 6 indicates that excessively high weights for edge devices can rapidly degrade network performance, underscoring the importance of proper weight distribution. In Figure 6, we observe an inversion of the purple curve, which occurs due to the system’s inclination to allocate more resources to support the task offloading of as the weight system increases. Schemes without user cooperation, constrained by the absence of collaborative efforts and poor channel conditions, experience a sharp decline. Consequently, at a weight coefficient of 0.6, a crossover of the curves is observed, where the EE represented by the purple curve falls below that of any other scheme with user cooperation.
Figure 7 illustrates the impact of the control parameter V on EE and the average stable queue length, with parameter settings of dB, MHz, a distance of 120 meters between nodes and , and a task arrival rate at of Mbps. As V increases, EE is enhanced, and the stable queue threshold also increases. This indicates that with the increase of V, EE becomes the primary concern, while the current queue length plays a relatively minor role in the objective function. However, when V reaches a certain threshold, the gain in energy efficiency becomes saturated, and further increasing V will no longer have a significant impact on system performance and queue length. This trend can be interpreted as follows: a larger V allows the system to buffer more data, which is consistent with the previous theoretical analysis. Thus, the problem is transformed into seeking to maximize EE while to some extent disregarding the current queue length.
Figure 8 illustrates the optimal time allocation of versus the performance gap . Initially, when is low, despite the lower energy consumption of the BackCom mode, achieving a larger number of computational bits at the same energy consumption is challenging. Consequently, MDs prefer the AC mode and allocate more time for energy collection to meet data processing needs. As increases, gradually decreases, and when exceeds -20 dB, . This is because, as increases, the BackCom mode can not only achieve more computational bits at the same energy consumption but also collect sufficient energy to support the circuit consumption under the AC mode, significantly improving energy efficiency. Therefore, as increases, users are more inclined to choose the BackCom mode, using its reflection capability to perform task transmission and energy collection to meet the circuit consumption [45]. This scheme ensures that under different conditions, the system can operate at the highest efficiency, optimizing energy usage.
Figure 9 illustrates that the EE under varying distances between and , with . The distance between the remote MD and the helper device ranges from 80 to 180 meters. It is observed that EE decreases as the distance increases. This is because an increase in distance leads to a reduction in channel gain, necessitating more time and higher power to transmit data to maintain a shorter data queue, thereby increasing energy consumption. This indicates that in practical deployment, the distance between edge node devices and helper devices should be kept within a reasonable range to avoid a rapid decline in network performance. This assessment not only quantifies the specific impact of distance on energy efficiency but also emphasizes the importance of considering the distance factor in the design of efficient networks.
In Figure 10, we evaluate the EE and the average task queue length as the task arrival rate at varies. The distance between and is set to 120 meters, and control parameter V is set to 40. As the computation task data arrival rate at increases, the EE decreases. The rise in data rate causes the local data queue to expand, necessitating a higher data transmission rate from the system. This not only entails processing a larger volume of data but also results in greater energy expenditure to maintain shorter data queues, thereby increasing overall energy consumption. Despite this trade-off in energy efficiency, our algorithm optimizes energy usage, ensuring that the system maintains efficient data processing and rapid response capabilities even as data rates increase.
6. Conclusions
In WPMEC systems, the volatility of the network environment and the time coupling of battery charging and discharging present significant challenges for the joint optimization of computation offloading and resource allocation. The integration of BackCom and AC is crucial for enhancing the performance of WPMEC systems across various user scenarios, especially with user collaboration, as it can significantly improve the performance of edge node devices with poor channel conditions. In this study, we design a user collaboration-assisted WPMEC system that integrates BackCom and AC, aiming to maximize EE by jointly optimizing the backscatter reflection coefficient, AC transmission power, time, and task allocation under dynamic loads and time-varying channel conditions. To address the complexity brought about by the coupling of multiple parameters, we propose a dynamic control algorithm, which employs variable substitution, fractional programming, Lyapunov optimization, and convex optimization techniques to simplify the problem into a convex optimization form and decouple the sequential decision-making problem into independent optimization tasks for each time slot. Simulation results show that our scheme effectively enhances EE while ensuring system stability, surpassing existing technologies. Furthermore, future research directions include exploring scenarios with multiple edge nodes and a few helper nodes, which is expected to further improve the system’s practicality and adaptability in real-world applications.
Author Contributions
Methodology, H.H.; Validation, Z.C. and Y.Y.; Formal analysis, H.H.; Investigation, H.H. and H.F.; Resources, H.H.; Data curation, H.H. and S.H.; Writing—original draft, H.H. and H.F.; Writing—review and editing, H.H.; Supervision, L.S. and S.H.; All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Science and Technology Planning Project of Guangdong Province, China (No.2021A0101180005), Science and Technology Development Fund of Macao (FDCT), Macao, China (#0033/2023/RIA1).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
We thank all of the reviewers for their valuable comments.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhao, R.; Zhu, F.; Tang, M.; He, L. Profit maximization in cache-aided intelligent computing networks. Physical Communication 2023, 58, 102065. [Google Scholar] [CrossRef]
- Wang, X.; Li, J.; Ning, Z.; Song, Q.; Guo, L.; Guo, S.; Obaidat, M.S. Wireless powered mobile edge computing networks: A survey. ACM Computing Surveys 2023, 55, 1–37. [Google Scholar] [CrossRef]
- Wang, F.; Xu, J.; Cui, S. Optimal energy allocation and task offloading policy for wireless powered mobile edge computing systems. IEEE Transactions on Wireless Communications 2020, 19, 2443–2459. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, B.; Lin, S.; Wang, C. A self-oscillation WPT system with high misalignment tolerance. IEEE Transactions on Power Electronics 2023. [Google Scholar] [CrossRef]
- Li, G.; Zeng, M.; Mishra, D.; Hao, L.; Ma, Z.; Dobre, O.A. Latency minimization for IRS-aided NOMA MEC systems with WPT-enabled IoT devices. IEEE Internet of Things Journal 2023, 10, 12156–12168. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. Throughput maximization in wireless powered communication networks. IEEE Transactions on Wireless Communications 2013, 13, 418–428. [Google Scholar] [CrossRef]
- He, H.; Zhou, C.; Huang, F.; Shen, H.; Li, S. Energy-Efficient Task Offloading in Wireless-Powered MEC: A Dynamic and Cooperative Approach. Mathematics 2024, 12. [Google Scholar] [CrossRef]
- He, Y.; Wu, X.; He, Z.; Guizani, M. Energy efficiency maximization of backscatter-assisted wireless-powered MEC with user cooperation. IEEE Transactions on Mobile Computing 2023, 23, 1878–1887. [Google Scholar] [CrossRef]
- Su, B.; Ni, Q.; Yu, W.; Pervaiz, H. Optimizing computation efficiency for NOMA-assisted mobile edge computing with user cooperation. IEEE Transactions on Green Communications and Networking 2021, 5, 858–867. [Google Scholar] [CrossRef]
- Hoang, D.T.; Niyato, D.; Wang, P.; Kim, D.I.; Han, Z. Ambient backscatter: A new approach to improve network performance for RF-powered cognitive radio networks. IEEE Transactions on Communications 2017, 65, 3659–3674. [Google Scholar] [CrossRef]
- Shi, L.; Ye, Y.; Chu, X.; Sun, S.; Lu, G. Energy-efficient resource allocation for backscatter-assisted wireless powered MEC. IEEE Transactions on Vehicular Technology 2023, 72, 9591–9596. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Lu, G. Throughput fairness guarantee in wireless powered backscatter communications with HTT. IEEE Wireless Communications Letters 2020, 10, 449–453. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Hu, R.Q.; Lu, G. Resource allocation in backscatter-assisted wireless powered MEC networks with limited MEC computation capacity. IEEE Transactions on Wireless Communications 2022, 21, 10678–10694. [Google Scholar] [CrossRef]
- Ji, L.; Guo, S. Energy-efficient cooperative resource allocation in wireless powered mobile edge computing. IEEE Internet of Things Journal 2018, 6, 4744–4754. [Google Scholar] [CrossRef]
- Sabella, D.; Vaillant, A.; Kuure, P.; Rauschenbach, U.; Giust, F. Mobile-edge computing architecture: The role of MEC in the Internet of Things. IEEE Consumer Electronics Magazine 2016, 5, 84–91. [Google Scholar] [CrossRef]
- Huang, M.; Liu, W.; Wang, T.; Liu, A.; Zhang, S. A cloud–MEC collaborative task offloading scheme with service orchestration. IEEE Internet of Things Journal 2019, 7, 5792–5805. [Google Scholar] [CrossRef]
- Sun, G.; Wang, Z.; Su, H.; Yu, H.; Lei, B.; Guizani, M. Profit Maximization of Independent Task Offloading in MEC-Enabled 5G Internet of Vehicles. IEEE Transactions on Intelligent Transportation Systems, 2024; 1–13. [Google Scholar] [CrossRef]
- Ernest, T.Z.H.; Madhukumar, A. Computation offloading in MEC-enabled IoV networks: Average energy efficiency analysis and learning-based maximization. IEEE Transactions on Mobile Computing 2023. [Google Scholar] [CrossRef]
- Zhang, S.; Bao, S.; Chi, K.; Yu, K.; Mumtaz, S. DRL-based computation rate maximization for wireless powered multi-AP edge computing. IEEE Transactions on Communications 2023. [Google Scholar] [CrossRef]
- Wu, X.; Yan, X.; Yuan, S.; Li, C. Deep Reinforcement Learning-Based Adaptive Offloading Algorithm for Wireless Power Transfer-Aided Mobile Edge Computing. 2024 IEEE Wireless Communications and Networking Conference (WCNC). IEEE, 2024, pp. 1–6.
- Wang, R.; Chen, J.; He, B.; Lv, L.; Zhou, Y.; Yang, L. Energy consumption minimization for wireless powered NOMA-MEC with user cooperation. 2021 13th International Conference on Wireless Communications and Signal Processing (WCSP). IEEE, 2021, pp. 1–5.
- He, B.; Bi, S.; Xing, H.; Lin, X. Collaborative computation offloading in wireless powered mobile-edge computing systems. 2019 IEEE Globecom Workshops (GC Wkshps). IEEE, 2019, pp. 1–7.
- Iwaki, A.; Sanada, K.; Hatano, H.; Mori, K. Performance Analysis of Wireless Powered Communication Networks Based on Harvest-then-Access Scheduling Considering Double-near far Problem. IEICE Technical Report; IEICE Tech. Rep. 2022, 122, 42–47. [Google Scholar]
- Zhang, W.; Zhang, G.; Mao, S. Deep-Reinforcement-Learning-Based Joint Caching and Resources Allocation for Cooperative MEC. IEEE Internet of Things Journal 2024, 11, 12203–12215. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, J.; Cui, S. User association and resource allocation for MEC-enabled IoT networks. IEEE Transactions on Wireless Communications 2022, 21, 8051–8062. [Google Scholar] [CrossRef]
- Wu, T.; He, H. An Efficient Energy Efficiency Maximization Algorithm for Backscatter-Assisted WP-MEC Network with Relay. Proceedings of the 2024 16th International Conference on Machine Learning and Computing; ICMLC ’24; Association for Computing Machinery: New York, NY, USA, 2024; pp. 720–727. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, L.; Chu, X.; Li, D.; Lu, G. Delay minimization in wireless powered mobile edge computing with hybrid BackCom and AT. IEEE Wireless Communications Letters 2021, 10, 1532–1536. [Google Scholar] [CrossRef]
- Correia, R.; Carvalho, N.B.; Kawasaki, S. Continuously power delivering for passive backscatter wireless sensor networks. IEEE transactions on microwave theory and techniques 2016, 64, 3723–3731. [Google Scholar] [CrossRef]
- Han, K.; Huang, K. Wirelessly powered backscatter communication networks: Modeling, coverage, and capacity. IEEE Transactions on Wireless Communications 2017, 16, 2548–2561. [Google Scholar] [CrossRef]
- Lyu, B.; Guo, H.; Yang, Z.; Gui, G. Throughput maximization for hybrid backscatter assisted cognitive wireless powered radio networks. IEEE Internet of Things Journal 2018, 5, 2015–2024. [Google Scholar] [CrossRef]
- Shi, L.; Ye, Y.; Chu, X.; Lu, G. Computation bits maximization in a backscatter assisted wirelessly powered MEC network. IEEE Communications Letters 2020, 25, 528–532. [Google Scholar] [CrossRef]
- Lin, D.; Wang, K.; Wang, T.; Ding, Z. Uplink Data Rate Maximization in Multi-Cell BackCom NOMA Systems. IEEE Open Journal of the Communications Society 2024, 5, 526–539. [Google Scholar] [CrossRef]
- Fu, Z.; Shi, L.; Ye, Y.; Zhang, Y.; Zheng, G. Computation EE Fairness for a UAV-Enabled Wireless Powered MEC Network With Hybrid Passive and Active Transmissions. IEEE Internet of Things Journal 2024. [Google Scholar] [CrossRef]
- Bi, S.; Zhang, Y.J. Computation rate maximization for wireless powered mobile-edge computing with binary computation offloading. IEEE Transactions on Wireless Communications 2018, 17, 4177–4190. [Google Scholar] [CrossRef]
- Xu, Y.; Gu, B.; Hu, R.Q.; Li, D.; Zhang, H. Joint computation offloading and radio resource allocation in MEC-based wireless-powered backscatter communication networks. IEEE Transactions on Vehicular Technology 2021, 70, 6200–6205. [Google Scholar] [CrossRef]
- Verdu, S. Fifty years of Shannon theory. IEEE Transactions on information theory 1998, 44, 2057–2078. [Google Scholar] [CrossRef]
- Neely, M. Stochastic network optimization with application to communication and queueing systems; Springer Nature, 2022.
- Sun, M.; Xu, X.; Huang, Y.; Wu, Q.; Tao, X.; Zhang, P. Resource management for computation offloading in D2D-aided wireless powered mobile-edge computing networks. IEEE Internet of Things Journal 2020, 8, 8005–8020. [Google Scholar] [CrossRef]
- Dinkelbach, W. On nonlinear fractional programming. Management science 1967, 13, 492–498. [Google Scholar] [CrossRef]
- Diamond, S.; Boyd, S. CVXPY: A Python-embedded modeling language for convex optimization. Journal of Machine Learning Research 2016, 17, 1–5. [Google Scholar]
- Zawawi, Z.B.; Huang, Y.; Clerckx, B. Multiuser wirelessly powered backscatter communications: Nonlinearity, waveform design, and SINR-energy tradeoff. IEEE Transactions on Wireless Communications 2018, 18, 241–253. [Google Scholar] [CrossRef]
- Wu, T.; He, H.; Shen, H.; Tian, H. Energy-Efficiency Maximization for Relay-Aided Wireless-Powered Mobile Edge Computing. IEEE Internet of Things Journal 2024, 11, 18534–18548. [Google Scholar] [CrossRef]
- He, H.; Zhou, C.; Huang, F.; Shen, H.; Li, S. Energy-Efficient Task Offloading in Wireless-Powered MEC: A Dynamic and Cooperative Approach 2024.
- Shi, L.; Ye, Y.; Chu, X.; Lu, G. Computation Bits Maximization in a Backscatter Assisted Wirelessly Powered MEC Network. IEEE Communications Letters 2021, 25, 528–532. [Google Scholar] [CrossRef]
- Xu, Y.; Gui, G. Optimal Resource Allocation for Wireless Powered Multi-Carrier Backscatter Communication Networks. IEEE Wireless Communications Letters 2020, 9, 1191–1195. [Google Scholar] [CrossRef]
Figure 1.
System model of WPMEC network with user-assisted
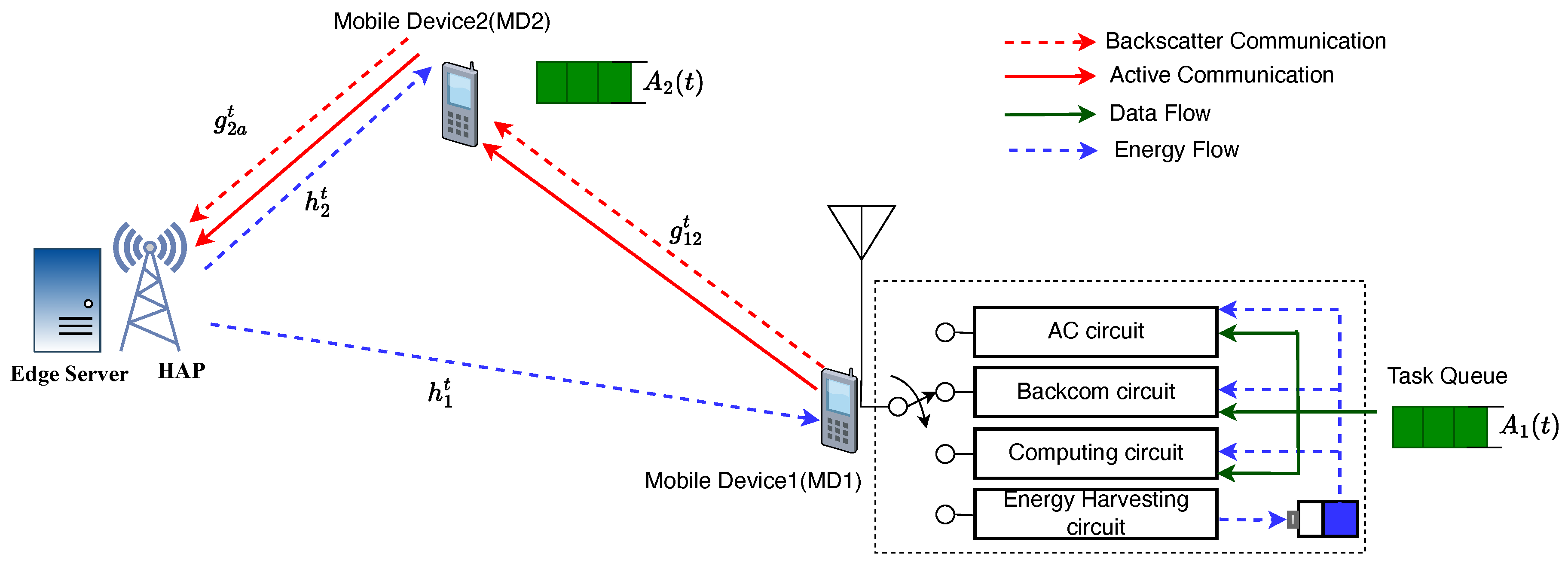
Figure 2.
Time division structure
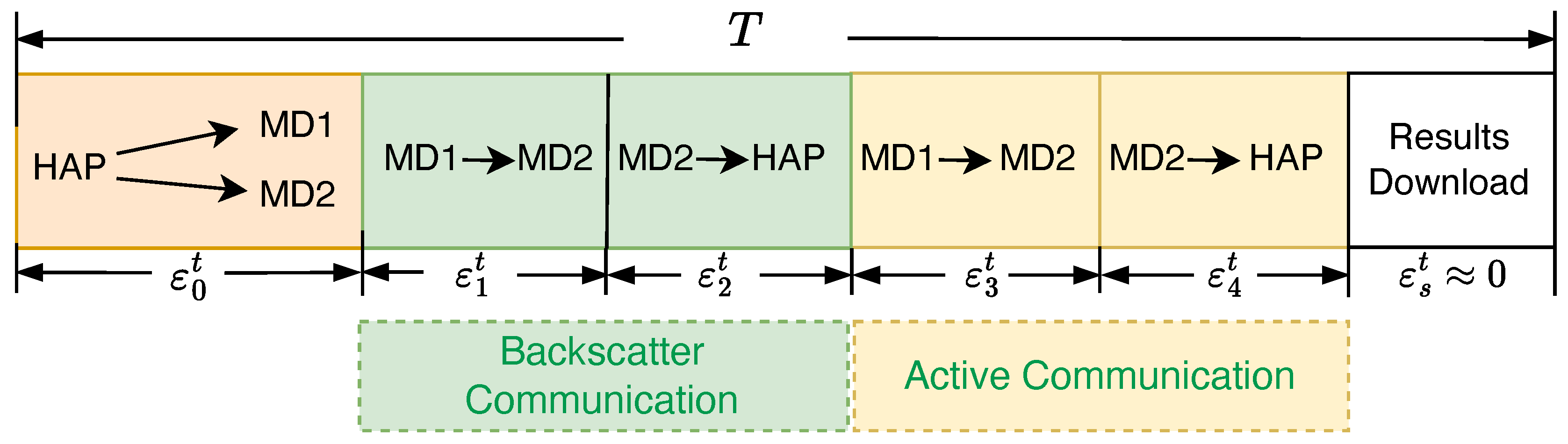
Figure 3.
Energy efficiency EE in different schemes over time slots.
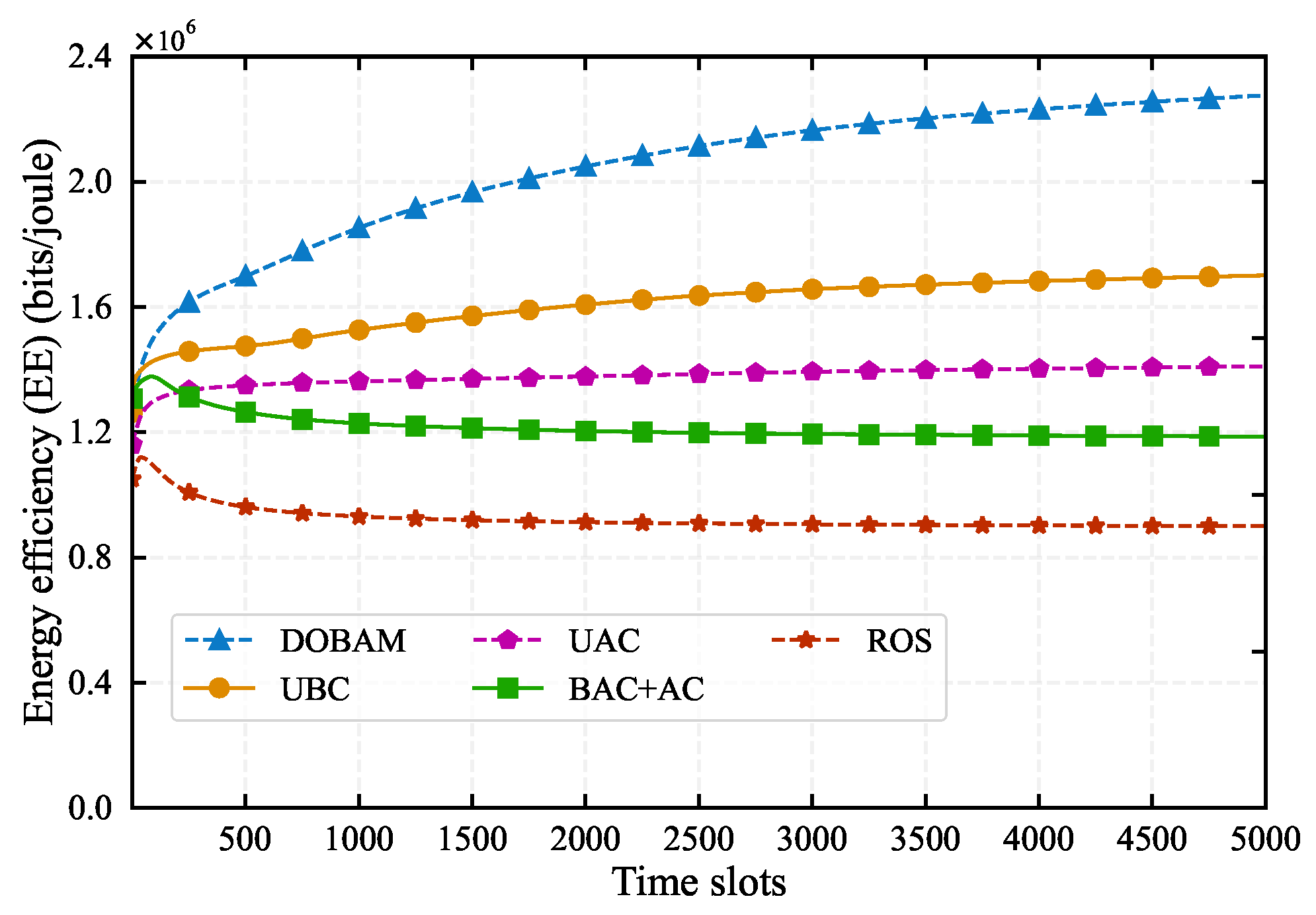
Figure 4.
Energy efficiency EE in different schemes versus the performance gap.
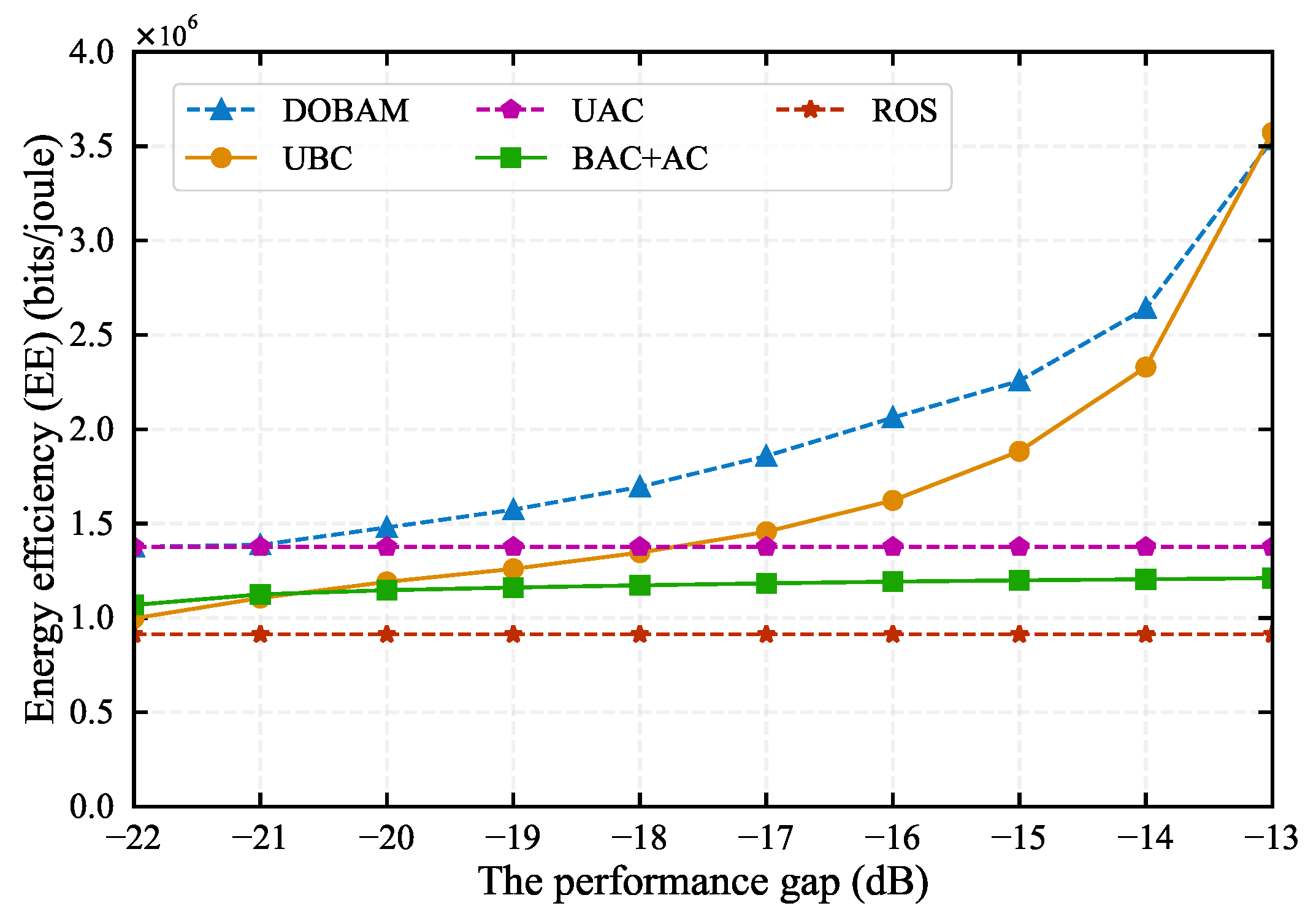
Figure 5.
Energy efficiency EE in different schemes versus bandwidth W.
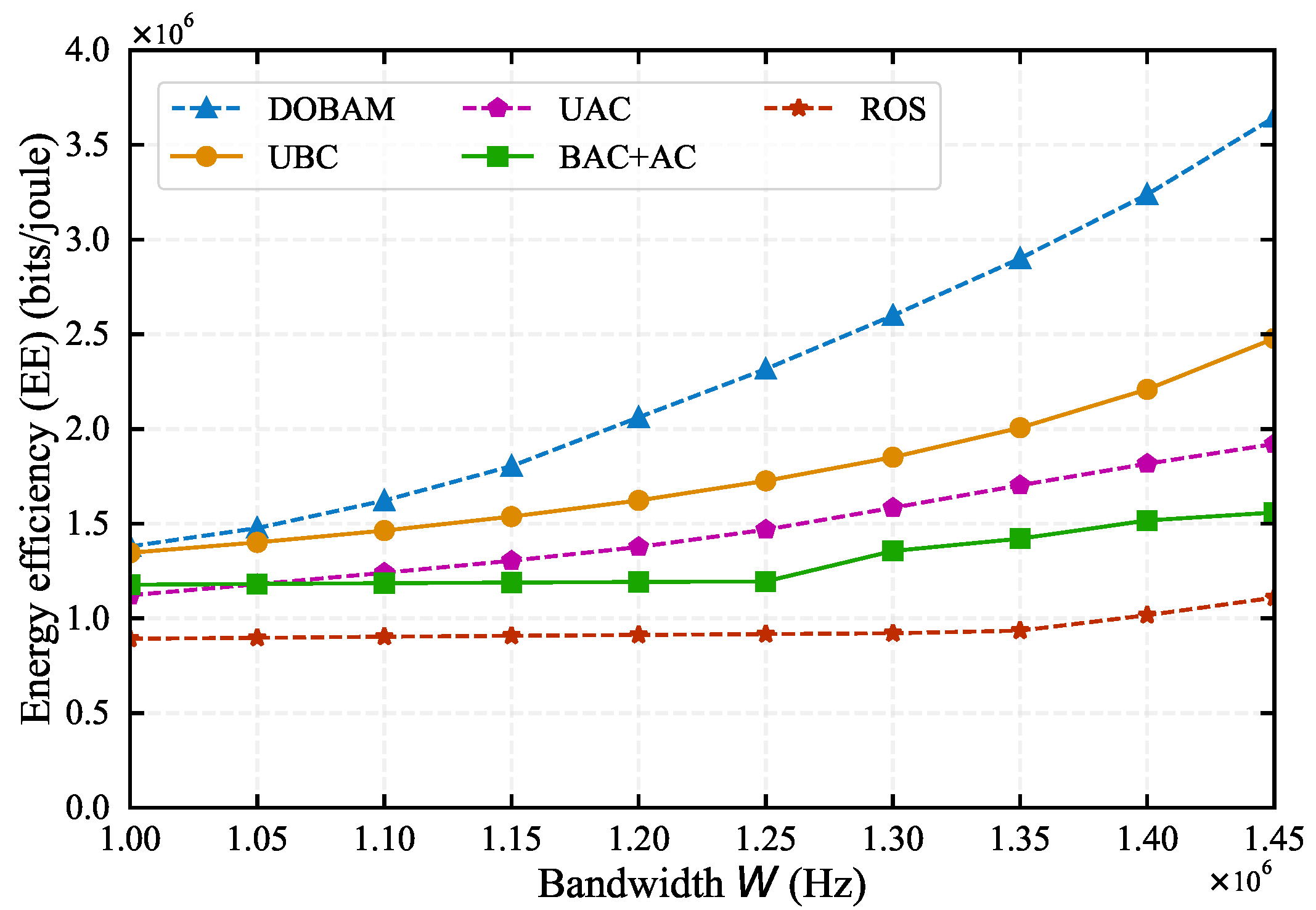
Figure 6.
Energy efficiency EE in different schemes versus weight .
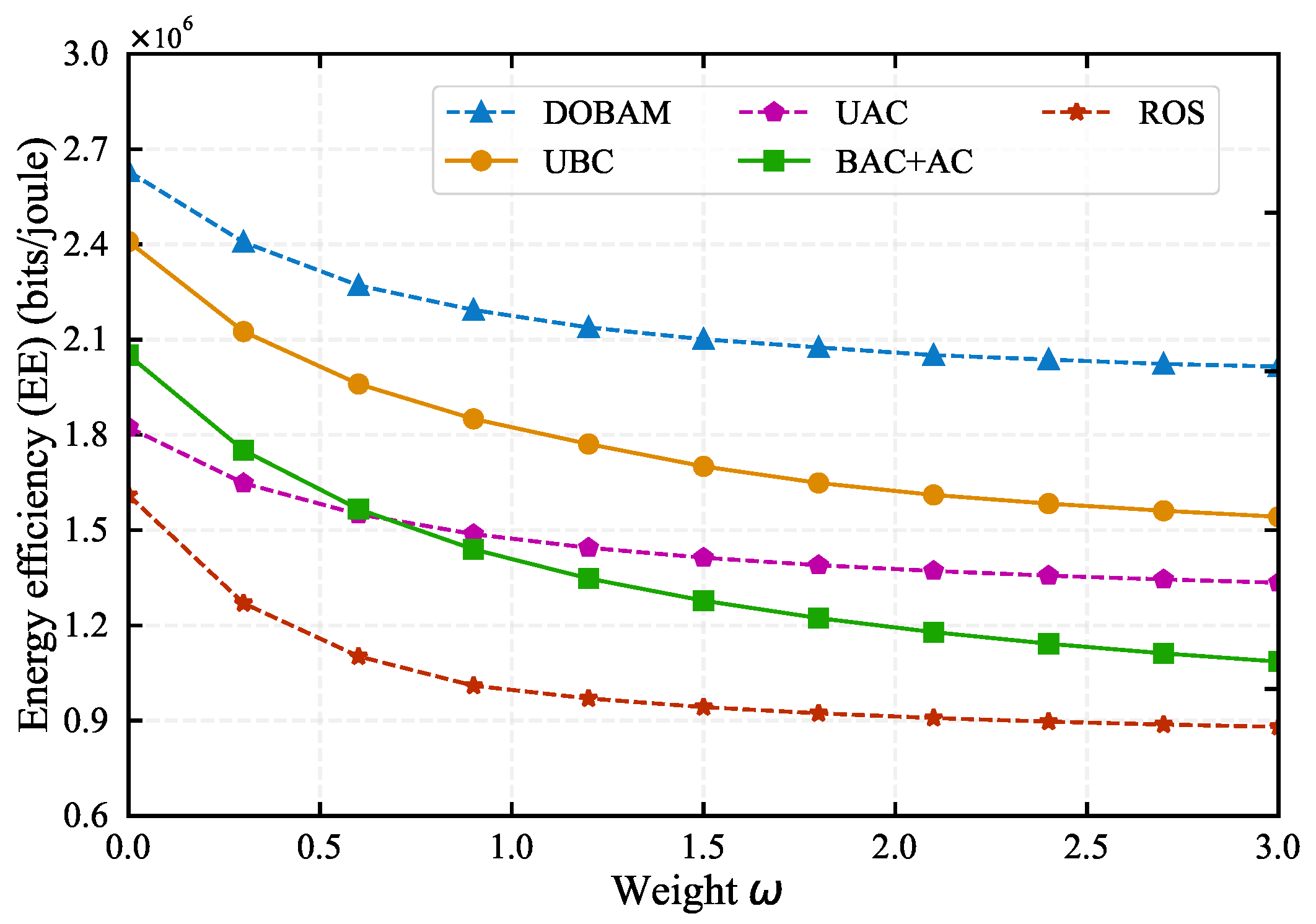
Figure 7.
Convergence performance of energy efficiency EE versus parameter V .
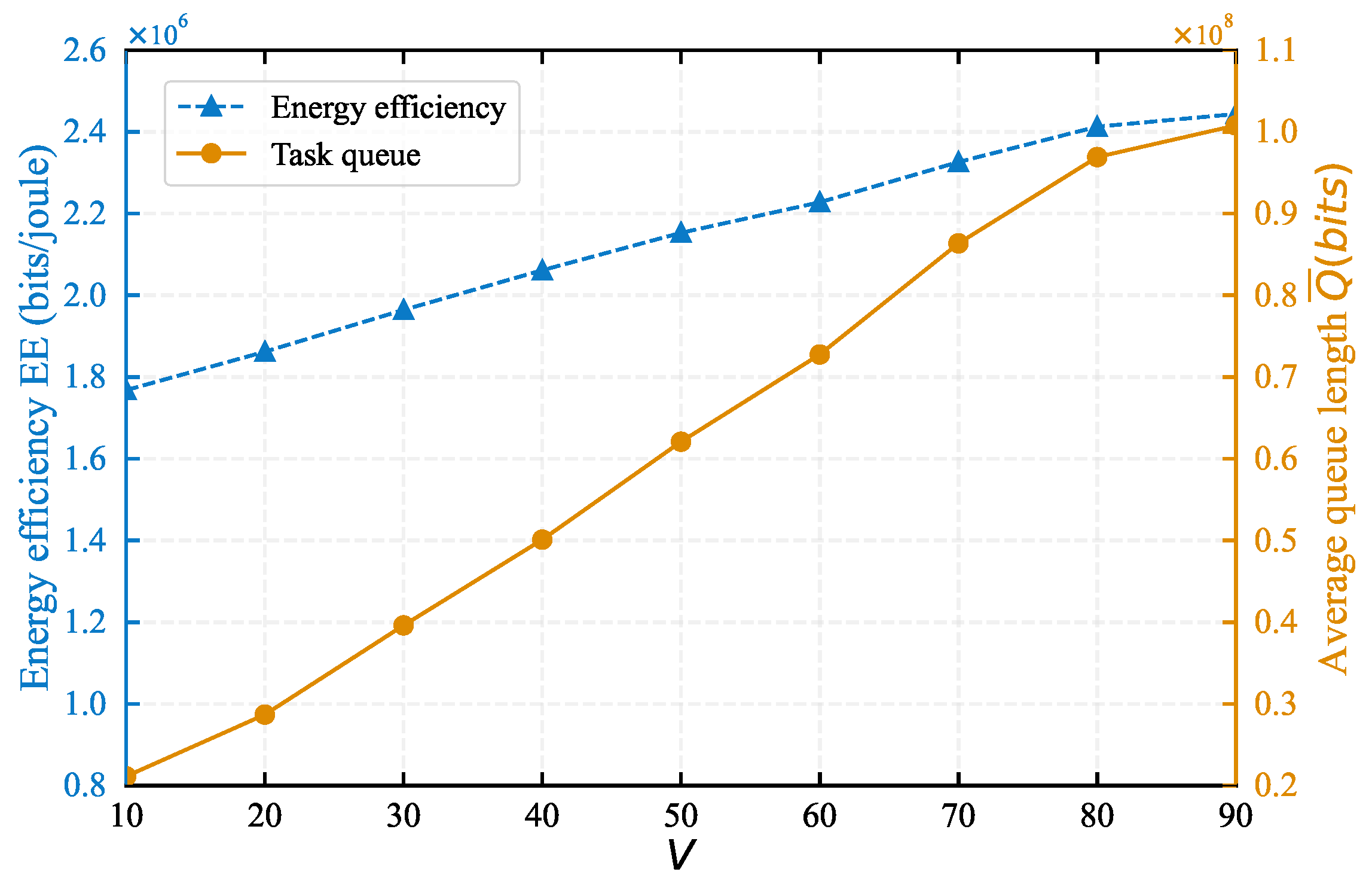
Figure 8.
The optimal time allocation versus the performance gap.
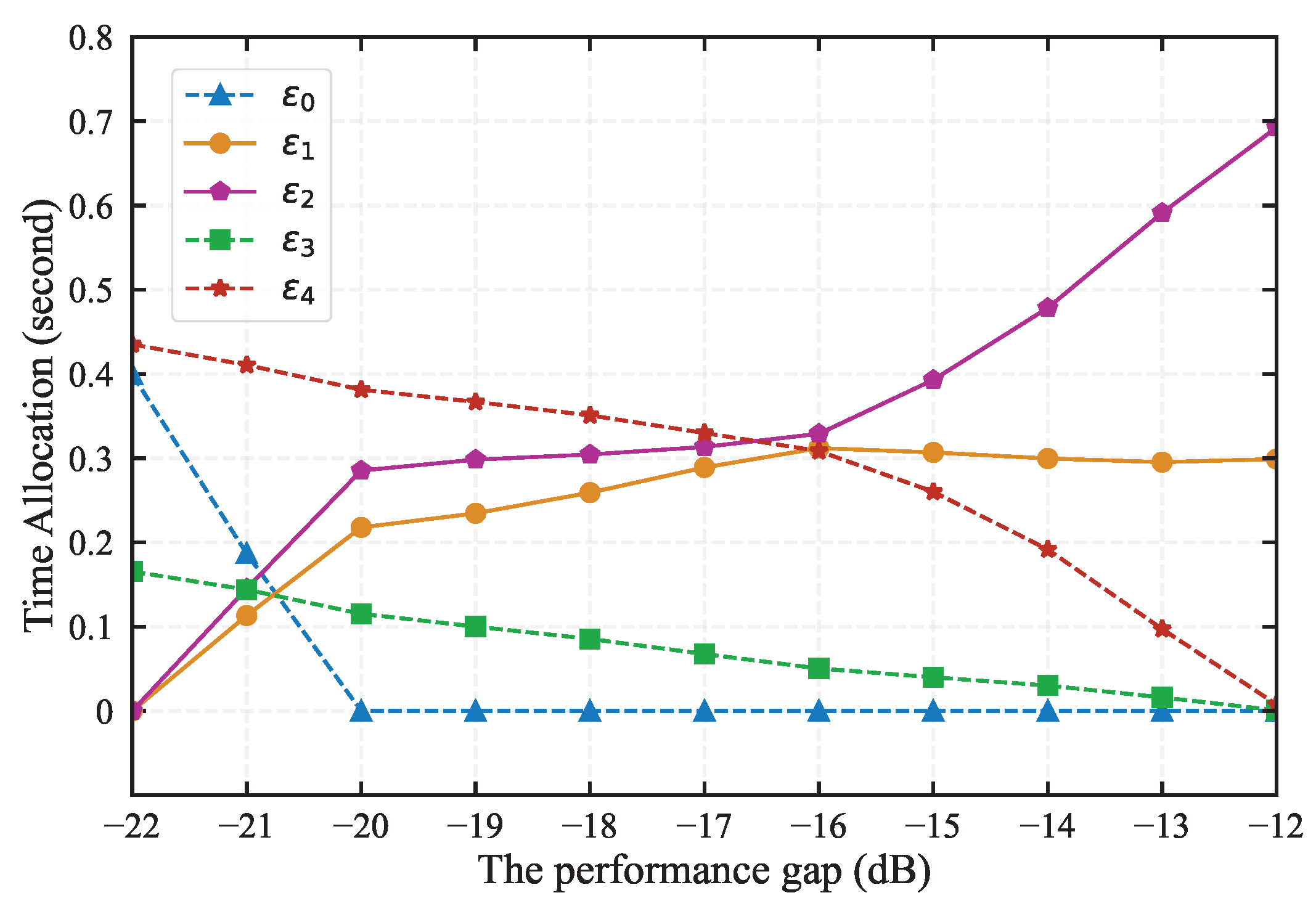
Figure 9.
Energy efficiency EE versus different distances between and .
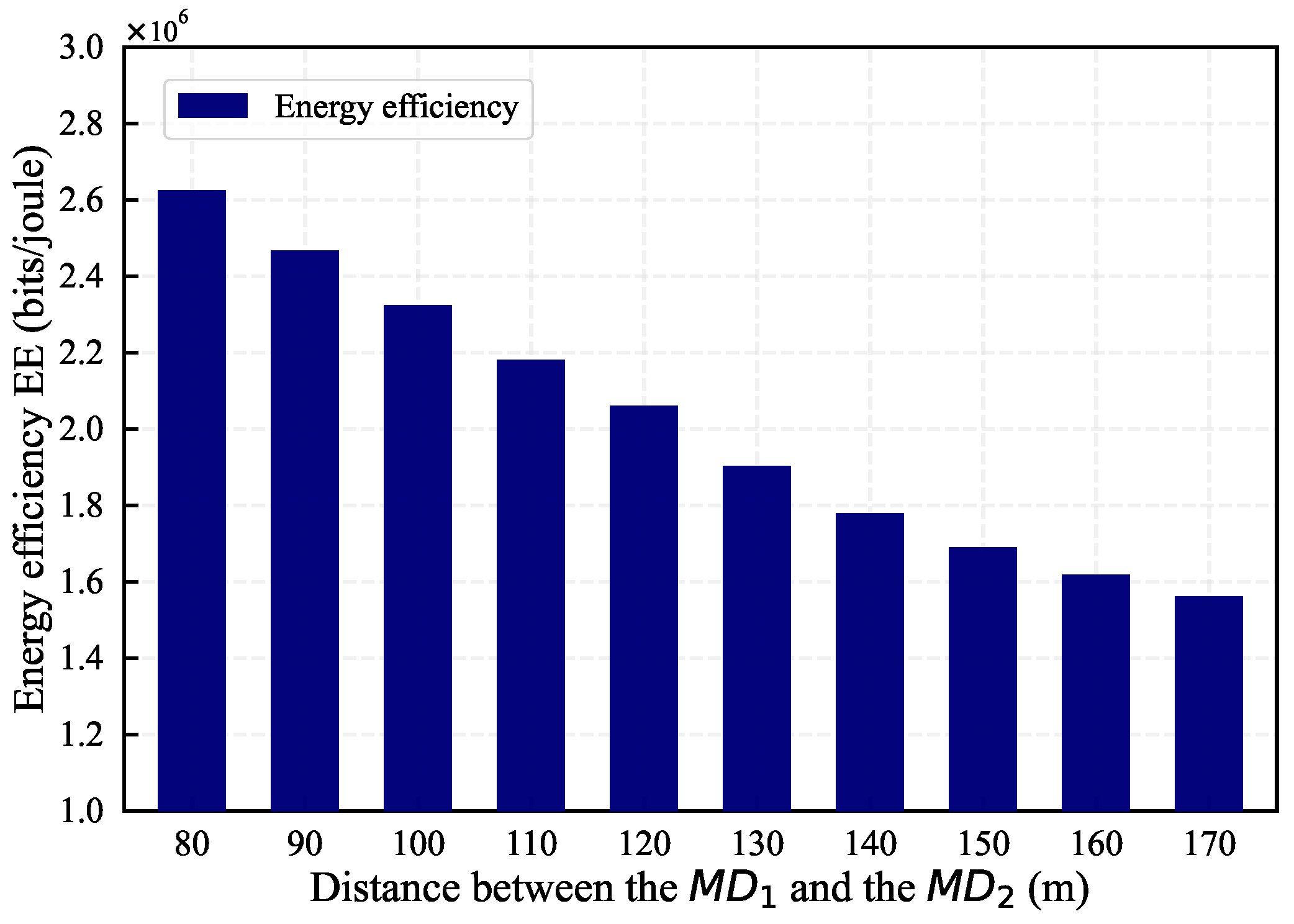
Figure 10.
Energy efficiency versus different task arrival rate
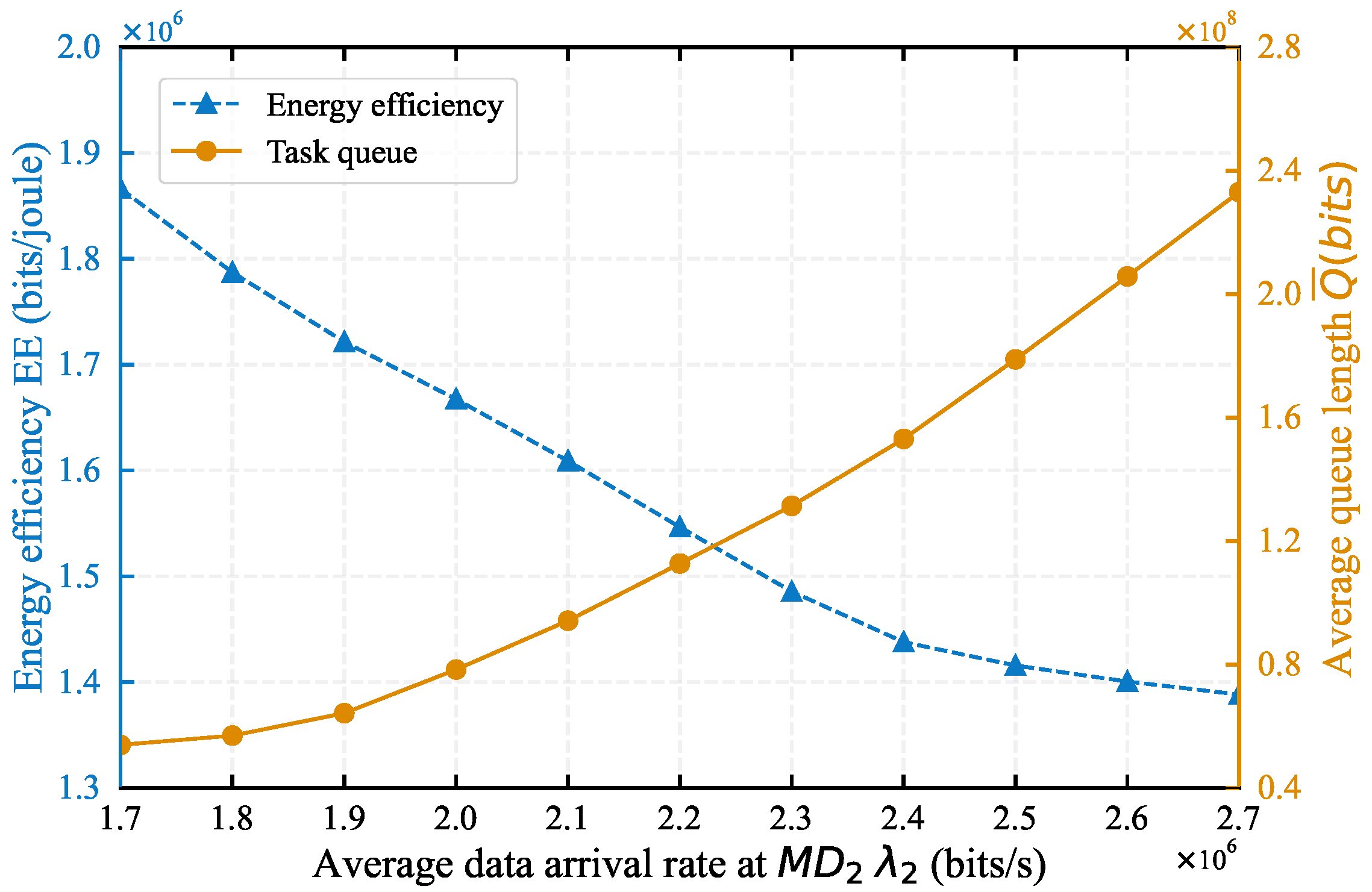

Table 1.
Summary of Key Notations.
| Notation | Definition |
|---|---|
| T | The time block |
| The time for WPT at slot t | |
| The time for offloading by BackCom of and at slot t | |
| The time for offloading by AC of and at slot t | |
| The energy harvested by at slot t | |
| The WPT channel gain between and HAP at slot t | |
| , | The offloading channel gain between and , and HAP at slot t |
| ,, | The transmit power by AC at HAP, , at slot t |
| , | The circuit power by BackCom and AC at |
| The amount of tasks processed locally at at slot t | |
| The amount of tasks offloaded by BackCom at at slot t | |
| The amount of tasks offloaded by AC at at slot t | |
| The energy consumed by processing tasks locally at at slot t | |
| The energy consumed by offloading tasks by BackCom at at slot t | |
| The energy consumed by processing tasks at helper at slot t | |
| The energy harvested by WPT at at slot t | |
| The energy harvested by Bakcom at at slot t | |
| The amount of tasks of processed by offloading at slot t | |
| The local CPU frequency at | |
| The CPU cycles required to compute one bit task at | |
| The reflection coefficient of at slot t | |
| The energy conversion efficiency | |
| The computing energy efficiency | |
| W | The channel bandwidth |
| The additive white Gaussian noise |
Table 2.
SIMULATION PARAMETERS.
| Symbol | Value |
|---|---|
| Time slot length | 1 s |
| Maximum battery capacity | 50 J |
| Minimum battery capacity | 0 J |
| Transmit power of the AP | 5 W |
| Noise power | W |
| The circuit consumption of the BackCom and | W |
| The circuit consumption of the AC and | W |
| CPU frequency of | 500 MHz |
| CPU cycles to compute 1 bit task of | 490 cycles/bit |
| CPU frequency of | 480 MHz |
| CPU cycles to compute 1 bit task of | 470 cycles/bit |
| Equal computing efficiency parameter of | |
| Equal computing efficiency parameter of |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



