
Submitted:
20 August 2024
Posted:
21 August 2024
You are already at the latest version
Abstract
With advancements in remote sensing technology and affordable design, uncrewed aerial systems (UAS), commonly known as drones, have become prevalent in both civil and military applications, such as agriculture, public safety, and aerial imaging. However, the rise in unlawful UAS activities, such as non-compliance with legal standards and potential terrorist attacks, has raised significant public concern, necessitating effective detection and mitigation solutions. Despite the growing importance of this issue, comprehensive and detailed examinations of existing counter-UAS solutions are lacking. To address this gap, this study conducts a bibliometric analysis and scoping review of the current literature to identify key topics and emerging trends in counter-UAS approaches. Utilizing co-word and social network analyses, the study identifies strong and weak connections between selected keywords from academic articles. This study summarizes the limitations and potential opportunities within counter-UAS research, suggesting an increasing focus on multisensory fusion and machine-learning approaches for drone detection and mitigation. Additionally, areas such as swarm drone operations, UAS traffic management (UTM), and UAS networks are identified as important but promising fields for further investigation. The findings of this study provide a foundation for enhancing air and ground safety through improved counter-UAS applications.
Keywords:
aviation safety
; Counter‐Uncrewed Aerial Systems (C‐UAS)
; machine learning
1. Introduction
Uncrewed Aerial Systems (UAS), also known as drones, are aerial systems without a human pilot onboard that perform a variety of flight missions. In recent years, the rapid evolution of supporting technologies has significantly enabled drones to have a wide capacity of functionalities, from basic aerial photography to complex surveillance and package delivery operations. In addition, the easy and affordable accessibility to this technology has driven exponential drone market growth due to technological advancements, decreasing component costs, and the increasing versatility of drones across various sectors. The implementation and proliferation of enhanced navigation systems, sophisticated payloads, and artificial intelligence have significantly contributed to the broader adoption of UAS in civil and military fields. In the commercial sector, drones are employed for precision agricultural field management, professional aerial photography and filming, infrastructure inspection, and goods delivery. In emergency response, drones assist in search and rescue, disaster assessment, and firefighting. Environmental monitoring also benefits from drones through wildlife monitoring and environmental change tracking. The military and defense sectors utilize drones for surveillance, reconnaissance, and targeted air strikes.
However, the widespread use of drones has introduced significant challenges related to safety, security, privacy, and other emerging concerns [1]. Malicious or unauthorized use of drones can pose threats to public safety, privacy, and critical infrastructure; examples of risk include near-miss with manned aircraft, terrorist activities, intentional misconduct, and unintentional crashes causing damages or injuries. These threats necessitate robust and practical measures to detect, identify, and neutralize unauthorized drones to ensure the safety and security of airspace, ground infrastructure, and people’s well-being. Confronted with drone threats, counter-UAS has emerged as an essential discipline to address relevant challenges. The principles of counter-UAS involve a combination of detection, tracking, identification, and mitigation strategies. Detection technologies include radar systems, radio frequency detection, electro-optical/infrared cameras, and acoustic sensors. Mitigation methods range from jamming and spoofing to directed energy weapons and kinetic systems. Integrating these technologies forms a comprehensive defense against the unauthorized use of drones, protecting sensitive areas and critical infrastructure from potential threats. Nevertheless, the unique characteristics of drones, such as being lightweight, small, and highly maneuverable, pose different challenges to developing effective countermeasures against malicious drones [2]. Therefore, growing efforts have been invested to research and develop more robust counter-UAS systems to mitigate drone threats. Nevertheless, a clear landscape of the existing studies in this interdisciplinary field is expected to provide valuable insights and guidance for relevant stakeholders to scope their efforts better to address the weaknesses and further improve the robustness of effective counter-UAS systems.
In the existing published literature, numerous studies have been found to be directly related to counter-UAS technology exploration in recent years. In contrast, only a limited number of surveys reviewing the development of counter-UAS technologies [1,2,3,4,5,6,7,8] were observed by the authors when performing this study. These studies provided informative scoping and systematic reviews on the state-of-art and challenges of counter-UAS technology to facilitate research commitment to the safe integration of UAS into the airspace system; however, a more comprehensive review is needed to provide a clear landscape and shaped research themes related to counter-UAS. In addition, the most recent comprehensive review was published in 2021 [1,7]; for this rapidly evolving discipline, it is necessary to periodically review the most recent trend and landscape of relevant studies to effectively and efficiently guide further research and development. Therefore, two research questions are developed in this study:
- What are the keywords and topics in the state-of-the-art counter-UAS research?
- What are the limitations and future research opportunities exposed in the state-of-the-art counter-UAS research?
In this context, to improve the knowledge about the structure of counter-UAS literature, a combination of bibliometric analysis and scoping review was employed in this study to investigate the recent development of counter-UAS technologies between 2020 and 2024 (May). The specific objectives, categories, and performance of counter-UAS technologies are summarized. The limitations and technology readiness are discussed. We used co-word analysis, a common bibliometric technique that examines how often keywords appear together in papers to explore connections between research topics [9]. To complement the disadvantages of co-word analysis, a scoping review extracts more detailed information from the body of literature. In summary, this study aims to assess the current state of counter-UAS research and encourage future academic and industry efforts.
The remainder of this survey is organized as follows: Section 2 outlines the bibliometric methodologies and details the literature collection process. Section 3 describes the procedures and findings from the co-word and social network analyses. Section 4 identifies the limitations and opportunities within counter-UAS studies, as revealed by the scoping reviews. Finally, Section 5 discusses the overall limitations of this survey and suggests future research directions.
2. Materials and Methods
2.1. Bibliometrics: Co-Word Analysis and Social Network Analysis
Bibliometric analyses, like meta-analyses and systematic reviews, are important evaluations of previously published work [10]. Donthu et al. [11] discussed the similarities and differences among these methods, noting that each has distinct advantages depending on the context. Unlike meta-analyses and systematic reviews, bibliometric analyses create unique visual representations of a field’s intellectual structure based on objective characteristics such as citations and keywords. The counter-UAS research area has gained significant attention across multiple disciplines, yet little is known about recent research themes and their future impact. To uncover this knowledge, we used co-word analysis to identify common keywords and their connections, helping to reveal the intellectual structure of counter-UAS studies.
2.2. Scoping Review
Although the co-word analysis helps reveal the counter-UAS studies, detailed contextual insights can hardly be obtained from such analysis [11]. A scoping review was adopted to supplement the knowledge obtained from the co-word analysis, focusing on the identified popular sub-topics to extract comprehensive and detailed insights into the critical limitations and future study opportunities. The following information is obtained from each article:
- Objective (s)
- Category of counter-UAS technology
- Limitations and opportunities
2.3. Search Criteria
This study adopted the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) method to systematically identify and review relevant literature [12,13]. Five databases were searched for relevant literature: Web of Science (WoS), Scopus, ProQuest, PubMed, and ScienceDirect. Those databases are expected to facilitate a collection of diverse studies from multiple disciplines.
Between January 2020 and May 2024, the databases were searched for the terms “counter-drone” OR “counter-unmanned aircraft systems” OR “counter-unmanned aerial vehicle” OR “counter-remotely piloted aircraft” OR “counter-UAS” OR “counter-UAV” OR “counter-RPA” contained in Title OR Keywords OR Abstract. “OR” is the Boolean operator in search. Only English-written peer-reviewed journal articles were included.
2.4. Study Selection
First, we gathered all potential studies by looking at their titles, keywords, and abstracts. A total of 404 records were collected: 41 from WoS, 62 from Scopus, 269 from ProQuest, six from PudMed, and 26 from Science Direct. We initially used RefWorks to remove duplicate studies, but some duplicates and irrelevant articles remained. We manually removed these in a second round of screening, which resulted in 328 articles. After this, three reviewers independently screened all the papers based on the following exclusion criteria:
- Not English-written peer-reviewed journal articles (76 articles)
- Not relevant to counter-UAS/drone (99 articles)
We ended up with 144 articles for bibliometric analysis.

Table 1.
Counter-UAS articles counted by the journal.
| Journal | Number of Articles |
|---|---|
| Sensors | 27 |
| Drones | 18 |
| IEEE Access | 6 |
| Remote Sensing | 6 |
| Applied Sciences | 4 |
| Electronics | 4 |
| Journal of Physics: Conference Series | 4 |
| Information | 3 |
| Defence Science Journal, Human Factors and Mechanical Engineering for Defense and Safety, IEEE Control Systems Letters, IEEE Transactions on Aerospace and Electronic Systems, Journal of Guidance, Control, and Dynamics, Systems, Technology in Society, Wireless Communications & Mobile Computing (Online) | 2 in each journal |
| Aeronautical Journal, Aerospace, Applied Intelligence, Bulletin of “Carol I” National Defense University, Chinese Journal of Aeronautics Complexity, Computer Law & Security Review, Digital War, Discover Internet of Things, Energies, Frontiers in Signal Processing, Frontiers of Information Technology & Electronic Engineering, Geo-Spatial Information Science, IEEE Aerospace and Electronic Systems Magazine, IEEE Open Journal of The Communications Society, IEEE Robotics and Automation Letters, IEEE Sensors Journal, IEEE Transactions on Instrumentation and Measurement, IEEE Transactions on Mobile Computing, IEEE Transactions on Wireless Communications, IEEE-ASME Transactions on Mechatronics, IET Radar Sonar and Navigation, Internal Security, International Journal of Advanced Computer Science and Applications, International Journal of Aviation, Aeronautics and Aerospace, International Journal of Critical Infrastructure Protection, International Journal of Intelligent Enterprise, International Journal on Smart Sensing and Intelligent Systems, International Review of the Red Cross, Internet of Things, IOP Conference Series. Materials Science and Engineering, ISPRS International Journal of Geo-Information, Journal of Aerospace Information Systems, Journal of Electrical and Computer Engineering, Journal of Imaging, Journal of Intelligent & Robotic Systems, Journal of Strategic Security, Journal of Transportation Security, JP Journal of Heat and Mass Transfer, Mathematical Problems in Engineering, Microwave Journal, Mokslas: Lietuvos Ateitis, Neural Computing & Applications, News of the National Academy of Sciences of the Republic of Kazakhstan, Series of Geology and Technical Sciences, Operations Research Forum, Optics Express, PeerJ Computer Science, PLoS One, Robotica, SSRG International Journal of Electrical and Electronics Engineering, Sustainability, Symmetry, Systems Engineering, The Journal of Applied Business and Economics, The Visual Computer, World Electric Vehicle Journal | 1 in each journal |
3. Co-Word Analysis and Social Network Analysis
3.1. Procedure of Analysis
To conduct a co-word analysis, we first identified the most mentioned keywords in counter-UAS research and explored how these keywords appeared together in studies. We combined this with social network analysis to calculate the centrality of keywords, thus revealing key themes and the foundation of this research domain [11]. This analysis helped us visualize the keyword network structure, show the strength of connections between keywords, and highlight gaps in existing research and potential avenues for future counter-UAS research.
3.1.1. Keyword Extraction
We used the keywords provided by the articles for co-word analysis. However, 15 out of the 144 articles did not provide keywords. For these, we followed the methods of [14] Wang et al. (2023) to extract the most frequently mentioned words or phrases from the full text of the articles. This approach assumes commonly used words and phrases represent an article’s main topics or themes. In total, we extracted 659 meaningful keywords and phrases from the 144 articles.
3.1.2. Keyword Standardization
Since the same concept can be described using different terms, we standardized the keywords to merge words and phrases with the same meaning [14,15,16,17]. For example, words such as “aerial systems,” “autonomous aerial vehicles,” “small unmanned aircraft system,” “UAS,” “UAV,” and “unmanned aerial systems” were standardized as “drone.” Phrases such as “armed drones,” “combat drones,” and “weaponized drones” were standardized as “armed drones.” The standardization process resulted in 30 top keywords from 144 articles, as shown in Table 2.
Co-word analysis operates on the principle that when two keywords frequently appear together, it suggests a close conceptual relationship or association between them [11,17]. We developed a keyword co-occurrence matrix as input for the co-word analysis [14,18]. Each figure in the matrix indicates the frequency with which a particular pair of keywords appeared in the analyzed articles. For instance, if four articles included “data fusion” and “drone identification” as keywords, the frequency of their co-occurrence was 4 in the matrix. A “0” in the matrix indicates that no articles included a particular pair of keywords. This lack of connection between keywords in the network is considered a structural hole, which may imply understudied relationships [19].
Using UCINET, we analyzed the keyword co-occurrence matrix from a social network perspective. The network map produced by UCINET is shown in Figure 1. In the map, the size of the nodes represents closeness centrality, and the lines’ thickness indicates the connections’ strength. Closeness centrality measures the relative importance of each keyword within the network [9]. This metric is determined by calculating the inverse of the average shortest-path distance from one node to all others in the network [20]. Thus, a higher closeness centrality value suggests a shorter distance between keywords, indicating their higher influence within the network. Our findings reveal that the closeness centrality of keywords varies from 0.5 to 0.935. Based on these values and following the methodology of Ronda-Pupo and Guerras-Martin [9], we divided the keywords into three categories: core, semi-periphery, and periphery. The keywords and their respective centrality measures are listed in Table 2.
3.2. Findings from Bibliometrics Analysis
3.2.1. Drone Detection and Machine Learning: The Most Central Topics
In addition to the main keywords “drone,” “counter-UAS,” and “counter-UAS system,” the terms “drone detection” and “machine learning” have much higher closeness centrality, with scores of 0.879 and 0.829, respectively. This high centrality means these keywords are closely connected to many other keywords. Since closeness centrality reflects the relative importance of a keyword within a keyword network [9], these high scores suggest that “drone detection” and “machine learning” have become significant research interests over the past four years. It makes sense that drone detection and machine learning-based approaches have been major research interests in counter-UAS. Detecting unauthorized drones is the first step for counter-UAS and is commonly considered the most important and challenging task, especially for non-cooperative drones [2,16]. Without detecting drones, downstream tasks, such as tracking, identification, and mitigation, would not be possible. UAS detection typically relies on various sensors, including acoustic, passive radio frequency, vision, and radar-based sensors. However, those sensors lack versatility and scalability; using a single type of sensor generally shows weak detection performance in dynamic scenarios. Given that hybrid sensor-based detection has drawn attention to integrating the advantages of different sensors in UAS detection, the data fusion from various sensors imposes technical challenges [2]. From the studies in recent years, machine learning-based techniques outperform many traditional methods for drone detection and classification utilizing single or multiple types of sensors [21,22,23,24,25,26,27,28,29,30]. Meanwhile, “drone tracking” and “drone classification” are two primary research topics. Drone tracking and classification are usually related to drone detection or related tasks as they demand and derive additional information about the targets. UAS detection is still the main research topic and attracts more attention than UAS mitigation. This finding suggests that counter-UAS studies are on the right track to address the prominent technical challenges through machine learning-based approaches.
3.2.2. Potential Research Opportunities from Central Topics and Structural Holes
Bibliometric analyses map out knowledge clusters and keyword networks in counter-UAS research from recent years. This approach is based on two assumptions: (1) some key research topics will remain important shortly, and (2) gaps in the network (known as structural holes) highlight under-studied areas. These gaps represent potential research opportunities, which can be identified from the keyword co-occurrence matrix wherever a “0” indicates a disconnection between keywords. However, some keywords can hardly be connected as being naturally irrelevant between subdomains; for example, “data fusion” related studies are usually not associated with “armed drone” related studies. Therefore, this study did not simply rely on the structural holes but identified strong connections, weak connections, and disconnections between core and non-core keywords with authors’ domain knowledge in the field. The strong connections between keywords are listed in Table 3; the weak connections and disconnections are listed in Table 4. “Drone,” “counter-UAS,” and “counter-UAS system” are excluded as they are the main keywords and are related to all other keywords.
The identified strong connections between keywords indicate some research topics expected to be critical and challenging in this domain and could remain popular in the near future:
- 4.
- Machine learning techniques were usually employed in drone detection studies. Given the advantages of machine learning techniques in various signal processing and analysis, machine learning integration is expected to be one of the mainstreams in counter-UAS studies, particularly those related to UAS detection, tracking, and classification.
- 5.
- Radar and radio signals were used more often for drone detection. Radar and radio frequency might be more promising and advantageous than other information, such as optical and acoustic information, especially in the case of long-distance detection with adverse background noise.
- 6.
- Drone tracking studies were usually associated with drone identification, localization, and classification functions. This type of study is critical as it yields critical information for the practical implementation of counter-UAS systems.
- 7.
- Drone classification studies were more associated with swarm drones and utilized radar, RF signals, and data fusion techniques. Drone classification provides critical information for counter-UAS systems to determine the correct mitigation strategy.
The identification of disconnections and weak connections between keywords suggests some interesting research areas that are potentially missed:
- Studies incorporating drone detection and swarm drone operations, UAS traffic management (UTM), and UAS network have not been observed but could be important.
- Machine learning or artificial intelligence lacks integrative studies supporting drone localization, neutralization, command and control for counter-UAS, and airport operation against UAS threats.
- Studies on swarm drones, command and control, drone neutralization, data fusion, and sensing technology did not closely interact with drone tracking. Integrative studies across subdomains, such as data fusion and sensing technology, might be promising to improve drone tracking capability.
- The literature on drone classification has not been observed in the areas of UTM, safety, security, command and control, and RF signal. Theoretically, different types of drones may impose different levels of risks; a good knowledge of drone classification helps with better risk assessment for drone safety and security management.
4. Scoping Review
This study adopted bibliometric analysis and provided a recent and broad overview of the research landscape, key journals, and emerging topics in the counter-UAS research domain. Although some central research topics and potential gaps were captured through bibliometric analysis, additional detailed literature analyses are needed to answer the second research question. Thus, more valuable insights could be extracted. For this purpose, the scoping literature review is employed to supplement the bibliometric analysis. The scoping review focused on identifying the objective of each study, the category of counter-UAS technology, and the technology capability and readiness. After a case-by-case review of the 144 articles, 104 are considered most relevant to counter-UAS. The remaining 40 articles, such as position papers, conceptual presentations, and social studies, are peripheral. Therefore, only 104 papers are included in the content analysis. Among the 104 papers, most studies were contributed by authors affiliated with China (26), followed by the United States (14), the Republic of Korea (8), Spain (7), and India (7), as presented in Figure 2. From the perspective of counter-UAS functions, 62 papers focused on UAS detection, 22 papers focused on UAS mitigation, and 20 papers covered both UAS detection and mitigation. The identified articles are summarized in Appendix I with detailed information such as author, year of publication, country of author’s affiliation, study objective, and strategy of counter-UAS technology. The findings were organized by the two main tasks of counter-UAS: detection and mitigation.
4.1. UAS Detection
4.1.1. Objective of Studies
From the 82 articles related to UAS detection, the study objectives include (1) drone detection by simply identifying the presence of drones, (2) drone tracking and localization with the ability to follow the movement and pinpoint the location of drones, (3) drone identification by determining the specific details or types of detected drones, (4) classification of drone type or payload weight, and (5) technology and context-specific detection using specific technologies (e.g., low-cost radar, lightweight technologies) or focusing on particular scenarios (e.g., time-varying scenarios and swarms). In Section 4.1 and 4.2, the authors removed non-practical studies, such as literature reviews and surveys, to explore the case-specific limitations and opportunities of counter-UAS studies. Therefore, a Sankey diagram for the scoping review is presented in Figure 4.
4.1.2. Limitations and Opportunities
Current acoustic-based strategies cannot identify and classify drones, and when considering environmental factors such as similar ambient sounds from manned aircraft, extensive validations in field trials are needed [31,32]. Similarly, the identification and classification of drones have been challenging for radar-based solutions [33,34,35,36,37,38,39,40], as well as drone swarm detection, classification, and tracking. Machine learning solutions would enable adaptive learning and continuous improvement of detection and classification algorithms, leading to more robust systems [41].
The most challenging scenario regarding vision-based solutions is the flexibility to deploy a data collection system with wide coverage and visibility since the cameras are sensitive to optical factors, such as weather and lighting conditions [42]. The requirement for high-resolution cameras and high-performance GPUs/workstations also limits the practical development of such applications [43]. To accommodate this bottleneck, model, and parameter optimizations based on portable GPUs and edge computing applications need extensive investigation [44]. In addition, the capability of vision-based solutions that distinguish drones from other flight objects, such as flying birds, manned fixed-wing aircraft, helicopters, and eVTOL, needs further investigation [45]. When the drones are not DJI-manufactured nor Remote ID equipped, incorporating AI in RF-based solutions can enable adaptive learning and continuous improvement of detection and classification algorithms, leading to more robust systems [46].
Data integration in multisensory strategies has been a challenge to reduce the latency and overload issues. High-performance hardware settings in data transmission and processing are usually required in multisensory cases [47,48,49,50,51,52,53].
Table 5.
Summary of studies on UAS detection.
| Technology | Objective(s) | Technologies/Models |
|---|---|---|
| Acoustic based | Drone detection | Apply acoustic signatures for a time-frequency representation of the beamformer’s output processing data [31] |
| Multi-drone detection in a time-varying scenario | Independent component analysis (ICA), support vector machines (SVM), k-nearest neighbors (KNN), and a time-varying drone detection technique [32] | |
| Radar-based | Classification of micro-drone payload weight | Micro-doppler signatures from radar systems [33] |
| VTOL fixed-wing drone detection | Radar signal analysis using X-band pulse-doppler phased array radar [34]; Radar cross-section signature analyses and simulations [37] | |
| Small drone detection | Doppler signal-to-clutter ratio detector [35]; statistical analyses of micro-doppler signals [54]; a ground clutter mitigation method [55]; passive radar [40]; continuous wave Doppler radar [56] | |
| Drone detection and tracking | Micro-doppler signals with different radar dwell times [36]; non-linear processing techniques (compressed sensing, principal component analysis, iterative adaptive approach, multiple-input-multiple-output) [38]; modified deep feedforward neural network [41]; Digital Video Broadcasting—Terrestrial (DVB-T) based passive radar [57] | |
| Drone detection with low-cost Radar | Low-cost solid-state marine radar, pulse-compression principles of operation [39] | |
| RF based | Drone detection and identification | RF-based UAV detection and identification using a hierarchical learning approach [22]; extraction of telemetry data through the decoding of drone ID packets [58]; physical-layer protocol statistical fingerprint [59]; detecting frequency hopping spread spectrum-Gaussian frequency-shift keying (FHSS-GFSK) drone communication signals [60] |
| Light-weight airborne drone detection | HackRF software-defined radio, deep learning neural networks (Open Neural Network Exchange), Intel Neural Compute Stick 2 [61]; C-band RF sensor, Xilinx FPGA, short-term Fourier transform, continuous wavelet transform, and smooth pseudo-Wigner Ville distribution [62] | |
| Drone tracking and localization | The received signal strength indicator (RSSI) ratio fingerprint method and the model-based RSSI ratio algorithm [14]; the Doppler VHF Omnidirectional Radio Range (DVOR) principle [42] | |
| Vision-based | Drone detection, identification, tracking, and classification | 4K camera and SOTA CNN model [43]; an upgraded YOLO with object augmentation [63]; a progressive feature fusing network, a pooling pyramid fusion, and a feature selection model [64]; YOLO v5, cross-stage partial network (CSPDarknet), feature pyramid network (FPN), path aggregation network (PANet), and CNN [45]; Spatio-temporal attention based Siamese method (SiamSTA); a framework consisting of a Siamese-based tracker, a hierarchical discriminator, a re-detection module, and a template updating module [65]; a peripheral-central vision system [66]; SAG-YOLO v5s [67]; a single camera and CNN [68]; telescope camera and YOLO v4 [69]; DeepSort algorithm coupled with Yolo v7 [44]; background subtraction, CNN [70]; YOLO v4 and MedianFlow [71]; CNN trained on synthetic images [72]; a dual capture network algorithm [73] |
| Lightweight drone detection | YOLO v4 [74]; YOLO v3 and v8 implemented on field programmable gate array (FPGA) [75]; YOLO v3, 53-layer CNN, AirSim simulator, Darknet framework [76]; double deep Q-network (DDQN), joint neural network (JNN) [77]; YOLO v3, OpenCV object trackers [78] | |
| Drone swarm detection and classification | Group target tracking improved by an automatic measurement partitioning method based on ordering points [79]; Transfer learning using pre-trained ResNet-50, VGG-16, Inception, and Xception nets [80] | |
| Multisensory Fusion | Drone detection, tracking, and identification | ADS-B, FLARM, direct telemetry reporting, and Remote ID [6]; Radio system, ADS-B, and radar equipped with four antenna arrays [48]; Audio and vision integration, CNN, SVM, Mel Frequency Cepstral Coefficients (MFCC) [49]; visual, acoustic, and magnetic field sensors, artificial intelligence, Bayesian Inference [51]; multimodal sensor fusion (standard video, microphone, thermal infrared sensor, fish-eye camera, ADS-B In, GPS receiver), YOLO v2, GMM background subtraction, Kalman filters, MFCC audio features or LSTM classifiers [53] |
| LiDAR-based | Drone detection, tracking, and identification | Continuous-wave coherent detection LiDAR capable of detecting micro-doppler signatures and raster-scan images [50] |
4.2. UAS Mitigation
4.2.1. Objective of Studies
Twenty-two articles related to drone mitigation are reviewed and summarized in Table 6. The objectives of relevant studies include (1) physical capture of detected drones, (2) intercept a rogue drone when the drone invades the pre-defined geographic boundaries, (3) Disable the detected rogue drone by jamming and/or spoofing (soft kill), and (4) Disable the detected rogue drone using physical destroy approaches (hard kill).
4.2.2. Limitations and Opportunities
Regarding physical capture-related studies, the limited operating range restricts the grab area of the manipulator end-effector. Improving the precision design and modeling of software components, such as vision algorithms and response time, would enhance overall system performance [81]. Enhancements to the theoretical models that better characterize the elastic properties of elastic web ropes are needed, alongside more in-depth simulations and experimental analyses due to the limited measurement methods available for flexible web launch tests [82]. Ma et al. [82] highlight the necessity of conducting more capture experiments in diverse scenarios to improve the robustness and practicality of these systems. Similarly, hard kill-focused studies indicate that future research should consider threat neutralization effectiveness, risk implications in civilian environments, validation of trajectory models at different elevation angles, and a deeper understanding of shot cup tilt initiation [83]. Moreover, systematizing electromagnetic interference (EMI)--based destruction methods for UAVs remains critical [84].
When applying interception in mitigation, leveraging multisensory data fusion and machine learning-based approaches is essential. Training deep reinforcement learning (DRL) agents through online/offline learning based on drone flight tests can enhance model performance [85]. Fu and Liu [86] recommend incorporating quadrotor dynamics, accounting for imperfect information and uncertainties, verifying and improving the robustness of proposed strategies, and conducting outdoor experiments. Çetin et al. [87] suggest including human demonstrators to reflect various policies that a learner drone would acquire during training. Brust et al. [88] emphasize the need for an inter-cluster communication mechanism to address issues when flocking blocks the movement of clusters. Enhancing collaboration among pursuers by incorporating reward functions, such as communication, is also necessary [89]. For long-term operations, deep learning is suggested to address the accumulated error from various sensors [90]. Additionally, studies by Lee et al. [91], Valianti et al. [92], and Gao and Li [93] underscore the importance of secure coordination approaches and anti-spoofing algorithms for safe and efficient counter-UAS operations.
Table 6.
Summary of studies on UAS mitigation.
| Technology | Objective(s) | Technologies/Models |
|---|---|---|
| Capture | Physical capture of a moving target | Apply acoustic signatures for a time-frequency representation of the beamformer’s output processing [31] data |
| Physical capture of drone swarm | Independent component analysis (ICA), support vector machines (SVM), k-nearest neighbors (KNN), and a time-varying drone detection technique [32] | |
| Analysis of flexible web for UAV capture | Field experiments [82] | |
| Intercept | Physical interception of intruders | A DRL approach based on global navigation satellite system (GNSS) deception [85]; A dominant region-based trajectory planning strategy [86]; a DRL with dueling network and prioritized experience replay trajectory planning strategy [87]; autonomous defensive drone swarm [88]; Guidance laws for intercepting directly/indirectly approaching targets [94,95]; multi-agent partial observable deep reinforcement learning for pursuer control optimization [89]; a multi-agent jamming system [90]; trajectory planning strategy from a family of time-to-capture isochrons [96]; guidelines of deploying the defensive drones [97] |
| Soft kill | Spoofing/Jamming | Hijacking device-specific communication link on a narrow RF band [91]; multi-agent coordinated close-in jamming [92]; a GNSS covert spoofing algorithm [93] |
| Hard kill | Destroy unauthorized drones | Use of EMI-based functional destruction means without damaging other radio-electronic equipment in the same environment [84]; 12-gauge counter-UAV ammunition [83]; hunter drones [98] |
5. Discussion
The scoping review of this study examined peer-reviewed journal articles from five databases (Web of Science, Scopus, ProQuest, PubMed, and ScienceDirect), ensuring the quality and validity of relevant studies. However, the extended period for peer review and revisions between these articles’ initial submission and final publication may hinder insights into state-of-the-art and practical counter-UAS approaches. Including a broader range of sources, such as proceedings and technical reports from IEEE Xplore, the Conference on Computer Vision and Pattern Recognition (CVPR), and Advances in Neural Information Processing Systems (NeurIPS), would greatly enhance the comprehensiveness of this work. The literature review focused on the period from 2020 to 2023, as the counter-UAS topic was not mature, and few studies were published before this timeframe. Given the rapid development of relevant technologies, it is recommended that such studies be updated regularly to maintain their relevance. Furthermore, this study employed co-keyword and connection analyses in its bibliometric analysis. Incorporating co-citation and co-author analyses could provide a deeper understanding of key topics, trends, and authorship dynamics in the counter-UAS field.
6. Conclusions
The proliferation of uncrewed aerial systems (UAS) in civil and military applications underscores their significant role in sectors like agriculture, public safety, and aerial imaging. However, the surge in unlawful UAS activities has heightened public concern, emphasizing the urgent need for effective detection and mitigation solutions. This study has addressed the critical gap in comprehensive examinations of counter-UAS solutions by conducting a thorough bibliometric analysis and scoping review of the current literature. The findings highlight key topics and emerging trends, with a particular focus on the importance of multisensory fusion and machine learning approaches for enhancing drone detection and mitigation. Additionally, the study identifies promising fields such as swarm drone operations, UAS traffic management (UTM), and UAS networks, suggesting these areas warrant further investigation. The limitations and opportunities outlined in this research provide a clear direction for future studies to advance counter-UAS technologies. Ultimately, the insights gained from this study lay a robust foundation for improving air and ground safety by developing and implementing more sophisticated counter-UAS applications. This work underscores the necessity for ongoing research and technological innovation to keep pace with the evolving challenges posed by unlawful UAS activities.
Author Contributions
Conceptualization, C.Y., C.H. and Y.Z.; methodology, C.Y., C.H. and Y.Z.; software, C.H. and Y.Z.; validation, C.H. and Y.Z.; formal analysis, C.Y., C.H. and Y.Z.; resources, X.X.; data curation, X.X.; writing—original draft preparation, C.Y., C.H. and Y.Z.; writing—review and editing, C.Y.; visualization, C.Y. and Y.Z.; supervision, C.Y. and C.H.; project administration, C.H..; funding acquisition, C.Y. and C.H. All authors have read and agreed to the published version of the manuscript.”.
Funding
This study was collectively funded by the NASA Nebraska EPSCoR Research Infrastructure Development FY22-26 Award #80NSSC22M0048 and Nebraska Research Initiative 2024-2025 Collaboration Initiative Grant #51269.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Appendix A
Table A1.
Summary of 104 studies related to counter-UAS detection and mitigation.
| Author, year, and Country | Objective(s) | Strategy |
| Detection (D) | ||
| Nemer et al. (2021), Saudi Arabia & Belgium [22] | Drone identification and detection | An ensemble learning based on the hierarchical concept, along with pre-processing and feature extraction stages for RF data |
| Martinez-Carranza et al. (2020), Mexico & UK [99] | Literature review (review of detection/classification/localization methods, advantages, limitations, new threats) | Acoustic-based (audio acquisition) |
| Kashiyama et al. (2020), Japan [43] | Detect flying objects at different distances under different weather conditions. | A 4K camera and a SOTA CNN model are used to achieve real-time processing. |
| Ajakwe et al. (2022), Republic of Korea [45] | Vision-based multi-tasking anti-drone framework to detect drones, identify airborne objects, determine their harmful status through perceived threat analysis, and check their proximity in real-time prior to taking action | A vision-based model developed and validated using manually generated drone samples |
| Aouladhadj et al. (2023), France [58] | Detection and tracking | RF-based approach: The identification (ID) tags in RF signals enable the extraction of real-time telemetry data by decoding Drone ID packets. |
| Basan et al. (2021), Russia [61] | Develop a method and system to detect UAS by actively attacking communication channels. | Proposed a lightweight hardware solution with sufficient high computing power that is located on the UAV to calculate the unwanted UAV in any place |
| Besada et al. (2021), Spain [6] | 1. Review SOTA technology in this wide variety of sensors 2. Propose a set of simulation models for them | This study reviews and summarizes current SOTA active radars, passive radars, and acoustic sensors in the C-UAS field and then proposes corresponding C-UAS simulation models. |
| Besada et al. (2022), Spain [47] | Tracking and identification. This study proposes an abstracted general statistical simulation model (mainly for ADS-B, FLARM, and Remote ID) for the most used collaborative sensors and surveillance systems. | Radar and data fusion. |
| Cai et al. (2022), China [74] | Detection on a real-time basis | Vision-based: an accurate and lightweight UAV detection model based on YOLOv4 (the model was lightened and the number of parameters of the model was reduced) |
| Cecio et al. (2024), Italy [75] | Explore the application of edge computing to drone classification | Image processing/computer vision: tune YOLO (V3 and V8) and implement it on a Field Programmable Gate Array (System-on-Chip) |
| Çetin et al. (2021), Spain [76] | Proposed a low-cost real-time drone detection with a guard drone | Computer vision-based technique implemented on guard-drone |
| Chen et al. (2022), China [100] | Tracking | Optical/vision: A simple and effective spatiotemporal attention-based Siamese method (SiamSTA), which performs reliable local searching and wide-range re-detection alternatively for robustly tracking drones in the wild. |
| Chen et al. (2023), China [101] | Tracking; Group Target Tracking for Highly Maneuverable Unmanned Aerial Vehicles Swarms | GTT is enhanced by an automatic measurement partitioning method based on ordering points to identify the clustering structure (OPTICS), DL method is proposed to improve centroid tracking precision, key point extraction is applied to estimate group’s 3D shape, and optimized criteria are proposed to improve the spawning or combination of tracking groups. |
| Cheng et al. (2022), China [65] | Tracking and identification. | Image processing/computer vision: a framework consists of a Siamese-based tracker, a hierarchical discriminator, a re-detection module, and a template updating module. |
| Delleji et al. (2022), Tunisia [63] | Mini-UAV detection under low-visibility conditions | Computer vision/optical-based, deep neural networks |
| Dhulashia et al. (2021), UK [33] | Classification of micro-drone payload weight | Radar-based: the use of micro-doppler signatures from radar systems operating at three different frequency bands |
| Dudczyk et al. (2022), Poland [48] | Detection, identification, and recognition in 3D space of a UAV violating restricted airspace | Multi-sensory data fusion: a radio system, an ADS-B transponder, and a radar-equipped with four antenna arrays. |
| Gong, Li, et al. (2022), China [34] | Investigate radar signals from drones (VTOL, copters) for VTOL fixed-wing drone detection. | Radar signal analysis using X-band pulse-Doppler phased array radar |
| Gong, Yan, et al. (2023), China [35] | Improve radar detection of small drones because of small radar cross-section values. | Apply a Doppler signal-to-clutter ratio detector in a radar system. |
| Gong, Yan, et al. (2022), China [36] | Drone detection by detecting the micro-doppler signals using radar systems with different radar dwell times | Radar detection with different radar dwell times |
| Han et al. (2023), China [64] | Drone detection in infrared images | Image processing/data fusion: a Progressive Feature Fusion Network, a Pooling Pyramid Fusion, and a Feature Selection Model. |
| Itare et al. (2022), France [31] | Drone detection and localization based on acoustic features (not identification) | The UAV’s acoustic signature is used for a time-frequency representation of the beamformer’s output processing. |
| Jačionis et al. (2020), Lithuania [102] | Literature review (review of detection methods, advantages, limitations, and new threats) | Literature review |
| Jamil et al. (2020), Pakistan, Canada, USA, & Qatar [49] | Drone detection | This novel framework consists of a hybrid of handcrafted and deep features to detect and localize malicious drones from their sound and Image information. |
| Kang et al. (2021), USA [66] | A peripheral-central vision system to detect, localize, and classify an airborne UAV | Vision-based |
| Kapoulas et al. (2023). Greece and South Africa [37] | Radar detection of small fixed-wing UAVs partially fills the gap that exists regarding the Radar cross section signatures and identification distances of fixed-wing UAVs. | Radar cross-section analysis through simulations |
| Khawaja et al. (2022), Pakistan, Finland, & USA [103] | Literature review (review of detection/localization/annihilation methods, advantages, limitations, new threats) It also includes unmanned underwater vehicles (UUVs). | Literature review |
| Kumar et al. (2023), USA [38] | Non-linear processing techniques to enhance UAV detection using a portable radar system | Signal processing techniques used for radar systems: compressed sensing, principal component analysis, iterative adaptive approach, and multiple-input-multiple-output |
| Kumawat et al. (2022), India [62] | An RF sensor and a digital circuit built inside the FPGA (field-programable gate array) are described. | RF-based solution. An innovative approach is proposed with the SP-WVD and adaptive decomposition filter bank. |
| Liu et al. (2021), China [68] | UAV detection and identification | Trajectory and image-based; vision/optical based using a single camera; convolution neural network classifier used to recognize objects |
| Lv et al. (2022), China [67] | Detection in high-resolution images with fixed cameras. | Vision-based (a detection method combining background difference and lightweight network SAG-YOLOv5s is proposed) |
| Morge-Rollet et al. (2022), France [59] | Detection and classification using a low-cost RF recorder | RF-based approach: The proposed method exploits the same protocol statistical fingerprint byte at the physical layer, compared to Wi-Fi, thus becoming protocol agnostic. |
| Mototolea et al. (2020), Romania & France [60] | Drone detection | Radio frequency-based: detect frequency hopping spread spectrum—Gaussian frequency—shift keying (FHSS-GFSK) drone communication signals in a non-cooperative scenario. |
| Ojdanić et al. (2023), Austria [69] | Feasibility analysis of optical UAV detection over long distances using robotic telescopes | Optical/Vision (telescope)- based detection: a high-precision mount and a telescope with a camera; YOLOv4. |
| Park et al. (2023), Republic of Korea [104] | Detection and tracking (multi-object tracking) with edge-computing environment and low-frame-rate Short-Wave Infrared (SWIR) images | Optical/Vision (SWIR images of city-surveillance scenarios); a fast and effective multi-object tracking method (Multi-Class Distance-based Tracking) (MCDTrack) in a low-power and low-computation edge-computing environment is proposed. |
| Ghazlane et al. (2024), Morocco [44] | Detection and tracking | Software: DeepSort algorithm coupled with Yolov7 |
| Pittu et al. (2023), India [80] | Multi-class drone classification and detection | Transfer learning-based techniques using pre-trained ResNet-50, VGG-16, Inception and Xception nets |
| Rodrigo et al. (2023), Denmark [50] | Detection of small UAV | LiDAR-based: continuous-wave coherent detection lidar capable of detecting micro-doppler signatures and acquiring raster-scan images of small drones. |
| Rojhani and Shaker (2024), Canada [105] | Review the effectiveness of MIMO and beamforming technologies in detecting low RCS UAVs. | Literature review |
| Rudys et al. (2022), Lithuania [39] | Detection | Low-cost solid-state marine radar working on FMCW and pulse-compression principles of operation. |
| Saadaoui et al. (2023), Algeria [51] | Drone detection using multiple sensors | Multisensory: visual, acoustic, and magnetic field sensors; artificial intelligence; and Bayesian Inference techniques to optimize decision-making in cases where conflict occurs among multisensory. |
| Sahay et al. (2022), USA [106] | Improve C-UAS (detection) reliability by quantifying the uncertainty while applying deep learning classifiers on electro-optical sensor data. | Developed an epistemic uncertainty quantification framework that utilizes the advantages of DL while simultaneously producing uncertainty estimates on both in-distribution and OOD input samples. |
| Seidaliyeva et al. (2020), Kazakhstan & USA [70] | Real-time drone detection with high accuracy | Moving object detection is based on background subtraction, while classification is performed using a CNN. |
| Seidaliyeva et al. (2023), Kazakhstan & USA [107] | Literature review (Detection and identification) | literature review |
| Shoufan and Damiani (2023), United Arab Emirates [52] | Protocols to formalize the interaction between the counter-drone system and relevant agents to clarify possible failures and violations. to complement current DRI systems, mitigating the effect of erroneous drone identification and supporting reliable decision-making | Contingency clarification protocols relying on the UTM system |
| Son et al. (2023), Republic of Korea [71] | Detection and tracking, and updating the target’s features online while tracking | Vision-based approach: a robust drone-tracking approach that integrates detecting (YOLOv4) and tracking (MedianFlow) algorithms based on an online learning classifier |
| Svanström et al. (2022), Sweden [53] | Drone detection and tracking in real-time | Sensor fusion of different sensing modalities (standard video, microphone, thermal infrared sensor, fish-eye camera, ADS-B In, and GPS receiver), software used YOLOv2, GMM background subtraction, Kalman filters, MFCC audio features or LSTM classifiers. |
| Uddin et al. (2022), Pakistan & Saudi Arabia [32] | Detect multiple drones with a time-varying technique using acoustic signals. | Acoustic signals, signal processing |
| Varshosaz et al. (2020), Iran [108] | Detection of UAS spoofing | Using visual odometry |
| Wang et al. (2023), Singapore [14] | Localization | Two received signal strength indicator (RSSI) ratio-based approaches are proposed to localize drones: the RSSI ratio fingerprint method and the model-based RSSI ratio algorithm. |
| Wisniewski et al. (2022), UK [72] | Drone model classification | Computer vision/image processing: Use CNN trained on synthetic images to classify drone models. |
| Xu et al. (2023), China [41] | Drone tracking for multistatic passive radar | Improve passive radar system for target tracking accuracy using a modified deep feedforward neural network (MDFNN). |
| J. Yan et al. (2023), China [54] | Recognize/identify drone types using radar micro-Doppler signatures | Analyze the micro-doppler signals produced by different drone blades to aid in radar-based target recognition of small drones (quantify the radar signatures using statistical measures—signal-to-noise ratio, signal-to-clutter ratio, doppler speed, doppler frequency difference, and Doppler magnitude ratio. |
| X. Yan et al. (2023), China [109] | UAV detection and tracking in urban environments using passive sensors | Literature review |
| Yang et al. (2022), China & UK [55] | Detection of low, slow, and small targets, as well as small drones, using radar with ground clutter. Investigate the feasibility and performance of a ground clutter mitigation method. | A ground clutter mitigation method combining slow-time multiple-input multiple-output (st-MIMO) waveforms and independent component analysis (ICA) in a ground-based MIMO radar focusing on LSS target detection |
| You et al. (2023), China [73] | Low-altitude drone attitude detection and tracking | Designed two capture networks with different resolutions. Computer vision based |
| Yousaf et al. (2022), United Arab Emirates [110] | LR of the trends and challenges of the most recent UAV detection methods | Literature review |
| Zhang et al. (2023), China [24] | drone remote control signal detection based on cyclic spectrum features | Signal processing and detection: A remote-control signal UAV-CYC set dataset is constructed, and a network architecture is proposed based on improved AlexNet. |
| Zhu et al. (2021), China [40] | Small drone detection through passive radar | Digital television terrestrial multimedia broadcasting (DTMB) based passive radar |
| Kyritsis et al. (2023), Greece [56] | Provide early warning for flying-by small UAS by applying a continuous wave Doppler radar. | Doppler radar-based technology by applying fast Fourier transform to the returned signal’s Doppler frequency. |
| Martelli et al. (2020). Italy [57] | DVB-T-based passive radar for simultaneous short-range surveillance against drones and long-range monitoring of aircraft at airport terminal area | DVB-T-based passive radar |
| Mitigation (M) | ||
| Ameloot et al. (2022), Belgium [83] | Investigate the multi-projectile behavior of 12-gauge counter-UAV ammunition. | Hard kill/destroy; 2D point mass model for the trajectory of the considered projectile, complemented with empirical assessment of the model |
| Belousov et al. (2022), Russia [84] | Counter-UAS using EMI-based functional destruction means avoiding damaging other radio-electronic equipment in the same complex environment. | This study focuses on the use of hollow and thin passive conductors, the use of a magnetodielectric in a reaction-symmetric modal filter, the use of reaction-symmetric structures for decomposing the train of ultrashort pulses (USP), and the use of a meander line as a protective means against USPs. |
| Brust et al. (2021), Luxembourg [88] | Intercept and escort intruders relying on an autonomous defense UAV swarm. | An autonomous defense UAV swarm |
| Çetin et al. (2022), Spain [87] | Counter a drone in a 3D space with another drone | A DRL with a dueling network and prioritized experience replay has been proposed to counter a drone in 3D space, and the experiences are loaded from the previous training by filtering the experiences. |
| Chae et al. (2024), Republic of Korea [85] | Counter fixed-wing drone system that can respond to fixed-wing drones in autonomous flight with soft kills. The system redirects fixed-wing drones to a designated target position using the GNSS deception based on the drone’s position and speed measured by radar. | Reinforcement learning, GNSS, radar, and Markov decision processes are defined to enable redirection. |
| Chakravarthy and Ghose (2020), USA & India [111] | Capture a swarm of intruder drones using a net manipulated by a team of defense UAVs | Physical capture with a net manipulated by a team of defense UAVs |
| Fu and Liu (2021), Canada [97] | Target defense game (defender intercepts an invading drone) with a slow defender | Trajectory planning for defenders, guidelines on how to deploy the defenders to ensure the target area is protected |
| Fu and Liu (2022), Canada [96] | Target defense game against a faster invader | Solve the saddle point strategy from a family of time-to-capture isochrons. |
| Fu and Liu (2020), Canada [86] | A dominant region-based strategy for a group of defenders to intercept an intruder | Dominant region-based strategy |
| Gao & Li (2023), China [93] | Spoofing | GNSS spoofing technology, a GNSS covert spoofing algorithm, is proposed to convert directional spoofing on UAV equipped with tightly coupled GNSS and IMU, which includes a fixed-point four-step spoofing strategy and avoidance of the least-squares residual receiver autonomous integrity monitoring (LSR-RAIM) of UAV |
| Lee et al. (2022), USA [91] | Conduct C-UAS by performing cyber-attacks on adversarial UAS by hijacking the device-specific communication link on a narrow RF band without the need for broad-spectrum RF energy bursts | 1. Validate the cyber-attack C-UAS concept by reviewing recent C-UAS operational experimental scenarios and analyzing the collected data. 2. A simulation model is constructed to analyze and validate the mission scenarios. 3. A comparison of energy efficiency and trade-offs of different C-UAS approaches |
| Liu et al. (2022), China [82] | Analysis of traction and unfolding dynamics of flexible webs for UAV capture | Physical intercepting and capture |
| Luo et al. (2023), China [95] | Provide a special cooperative guidance law for intercepting a cluster of UAVs using mother-son missiles. | Cooperative guidance law |
| Ma et al. (2024), China [112] | Capture illegal drones | Vision-based (YOLO-v5) techniques for drone identification establish a visual-servo system to determine the relative position, an extended Kalman filter algorithm for flight trajectory prediction, and a robotic arm for capturing. |
| Pärlin et al. (2024), Finland, Belgium & Germany [113] | UAS reliability/robustness against counter-UAS system | Radio technology (full duplex vs. half duplex) jamming. |
| Pierre et al. (2023), USA [89] | Pursue and intercept a faster UAS or evader. | AI/machine learning: multi-agent partial observable deep reinforcement learning for pursuer control optimization |
| Siddhardha and Ratnoo (2023), India [94] | Present guidance laws that aid a protective drone moving on a closed circular boundary to intercept a rogue drone attempting to penetrate that boundary | Guidance laws for intercepting directly/indirectly approaching targets |
| Souli et al. (2023), Cyprus [90] | Rogue drone interception | Jamming: multi-agent jamming system (a group of cooperative autonomous agents employ various algorithms: detection, tracking, jamming, and self-localization) to counter unauthorized drone operations |
| Tan et al. (2021), USA [114] | The systematic step-by-step evaluation process for the counter-UAS system | Model-based systems engineering tools (MBSE) |
| Valianti et al. (2022), Cyprus [92] | Disable a rogue drone | Multi-agent coordinated close-in jamming |
| Vidyadhara et al. (2022), India [81] | A novel passive single-degree-of-freedom manipulator design and its integration on an autonomous drone to capture a moving target. | A full capturing system |
| Su et al. (2022), China [115] | Framework to optimize the false target jamming to decrease the probability of being detected by UAVs on the battlefield. | An evolutionary framework implemented with four popular evolutionary algorithms |
| Detection and Mitigation (D&M) | ||
| Castrillo et al. (2022), Italy [8] | Evaluate the concept of a multiplatform counter-UAS system based on a team of mini drones acting as a cooperative defensive system. | A literature review of the available technologies for sensing, mitigation, and command and control systems that comprise a C-UAS, focusing on their applicability and suitability for mini drones. |
| Çetin et al. (2020), Spain [77] | The learning drone is trained to detect stationary and moving obstacles and to counter and catch the target drone without crashing with any other obstacle inside the neighborhood. | The full state, composed of the image and the auxiliary data, is processed with a neural network. The image is the input of a CNN, followed by a flattened layer. Then, a concatenation layer joints the flattened output of the CNN with the scalar auxiliary data of the state |
| Cline & Dietz (2020), USA [116] | What are the effects of a threat UAV’s speed on the detection and interdiction of a C-UAS designed to protect a 40-acre facility from threat UAS overflights given hypothetical C-UAS sensor performance data and fixed interdiction characteristics? | Agent-based modeling software (AnyLogic modeling software) |
| Espada (2020), Spain [117] | Review the study of the existing counter-UAS systems and their use considering international law. | Review work, position paper |
| Chiper et al. (2022), Romania [118] | The literature review (review of detection/localization/annihilation methods, advantages, limitations, and new threats) emphasizes RF-based systems implemented using software-defined radio (SDR) platforms. PRISMA is referred to. | RF-based solutions. The DronEnd system (RF-based and SDR platform) is presented. |
| Fortune et al. (2022), Estonia & Germany [119] | A position paper to justify the need for counterterrorist UAS | Literature review |
| Hao et al. (2020), China [120] | Research on anti-UAV swarm control system | Literature review |
| Kang et al. (2020), South Korea [4] | Provides a comprehensive survey of C-UAS, describing its key technologies and providing sufficient information to comprehend this system. | Survey/review |
| Kim et al. (2023), South Korea & China [78] | A vision-based UAV chasing system can be embedded in a pursuer UAV to protect it from attacks by an evader UAV. | Computer vision-based, deep learning-based (YOLOv3) |
| Kootala et al. (2023), USA [121] | Literature review (review of detection methods, advantages, limitations, and new threats). | Drone Jammers, Directed Energy Weapons, Net Guns, Surveillance Cameras, Patrolling Drones |
| Lykou et al. (2020), Greece [3] | A survey of drone incidents near airports and a literature review of sensor technologies able to prevent, detect, identify, and mitigate rogue drones. | A resilience action plan is proposed to support airport operators and stakeholders to increase the robustness of critical assets and infrastructures against airborne malicious threats. |
| Nallamalli et al. (2023), India [122] | Counter UAV swarms | Analyze the problems, identify the demand and requirements, and propose a conceptual design. |
| Park et al. (2021), South Korea [7] | A comprehensive survey on anti-drone systems for civilian facilities. | A survey study |
| Pascarella et al. (2023), Italy, France & Spain [123] | Evaluation of a resilience-driven operational concept to counter-UAS in airports | Propose a concept based on the evaluation of simulations and event tree analysis. |
| Rahman et al. (2024), Republic of Korea [30] | Describe the recent use of various UAV detection and classification technologies based on ML and deep learning algorithms. | A survey study |
| Rudys et al. (2022), Lithuania [39] | Propose a concept of an airborne counter-UAS platform consisting of several vehicles with radar to overcome the short-range limitation of existing countermeasures. | Using a low-cost marine radar with a high-resolution 2 m wide antenna embedded into the wing and a small rotorcraft UAV carried by a bigger fixed-wing as countermeasures. |
| Su et al. (2021), China [124] | Operational effectiveness evaluation for anti-UAV system | Fuzzy analytic hierarchy process |
| Tianfeng et al. (2023), China [125] | Review the current development status of anti-UAV swarm systems | A review/position paper |
| Wang et al. (2021), USA [1] | Present a systematic introduction of C-UAS technologies, thus fostering a research community committed to the safe integration of UAS into the airspace system. | Literature review (comprehensive survey of existing literature in C-UAS) |
| Kashi et al. (2024), India [126] | Scenario-based comparative analysis and discussion of drone detection systems | A survey study |
References
- Wang, J.; Liu, Y.; Song, H. Counter-unmanned aircraft system (s)(C-UAS): State of the art, challenges, and future trends. IEEE Aerospace and Electronic Systems Magazine 2021, 36, 4–29. [Google Scholar]
- Herrera, G.J.; Dechant, J.A.; Green, E.; Klein, E.A. Technology trends in small unmanned aircraft systems (suas) and counter-uas: A five-year outlook; Institute for Defense Analyses.: 2022.
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending airports from UAS: A survey on cyber-attacks and counter-drone sensing technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.; Joung, J.; Kim, J.; Kang, J.; Cho, Y.S. Protect your sky: A survey of counter unmanned aerial vehicle systems. Ieee Access 2020, 8, 168671–168710. [Google Scholar]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Gupta, N.; Guizani, M. A comprehensive review of unmanned aerial vehicle attacks and neutralization techniques. Ad hoc networks 2021, 111, 102324. [Google Scholar] [PubMed]
- Besada, J.A.; Campaña, I.; Carramiñana, D.; Bergesio, L.; de Miguel, G. Review and simulation of counter-UAS sensors for unmanned traffic management. Sensors 2021, 22, 189. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.T.; Lee, S.; Joo, H.; Kim, H. Survey on anti-drone systems: Components, designs, and challenges. IEEE access 2021, 9, 42635–42659. [Google Scholar]
- Castrillo, V.U.; Manco, A.; Pascarella, D.; Gigante, G. A review of counter-UAS technologies for cooperative defensive teams of drones. Drones 2022, 6, 65. [Google Scholar] [CrossRef]
- Ronda-Pupo, G.A.; Guerras-Martin, L.Á. Dynamics of the evolution of the strategy concept 1962–2008: a co-word analysis. Strategic management journal 2012, 33, 162–188. [Google Scholar]
- Bem, D.J. Writing a review article for Psychological Bulletin. Psychological Bulletin 1995, 118, 172. [Google Scholar]
- Donthu, N.; Kumar, S.; Mukherjee, D.; Pandey, N.; Lim, W.M. How to conduct a bibliometric analysis: An overview and guidelines. Journal of business research 2021, 133, 285–296. [Google Scholar]
- Page, M.J.; Moher, D.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E. PRISMA 2020 explanation and elaboration: updated guidance and exemplars for reporting systematic reviews. bmj 2021, 372. [Google Scholar]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. bmj 2021, 372. [Google Scholar]
- Wang, Y.; Zeng, Y.; Sun, S.; Tan, P.H.; Ma, Y.; Kurniawan, E. Drone Controller Localization Based on RSSI Ratio. Sensors 2023, 23, 5163. [Google Scholar] [CrossRef]
- Callon, M.; Courtial, J.P.; Laville, F. Co-word analysis as a tool for describing the network of interactions between basic and technological research: The case of polymer chemsitry. Scientometrics 1991, 22, 155–205. [Google Scholar]
- Wang, Z.-Y.; Li, G.; Li, C.-Y.; Li, A. Research on the semantic-based co-word analysis. Scientometrics 2012, 90, 855–875. [Google Scholar]
- Zupic, I.; Čater, T. Bibliometric methods in management and organization. Organizational research methods 2015, 18, 429–472. [Google Scholar]
- Ding, Y.; Chowdhury, G.G.; Foo, S. Bibliometric cartography of information retrieval research by using co-word analysis. Information processing & management 2001, 37, 817–842. [Google Scholar]
- Burt, R.S. Structural holes. In Social stratification; Routledge: 2018; pp. 659-663.
- Okamoto, K.; Chen, W.; Li, X.-Y. Ranking of closeness centrality for large-scale social networks. In Proceedings of the International workshop on frontiers in algorithmics, 2008; pp. 186-195.
- Basak, S.; Rajendran, S.; Pollin, S.; Scheers, B. Combined RF-based drone detection and classification. IEEE Transactions on Cognitive Communications and Networking 2021, 8, 111–120. [Google Scholar]
- Nemer, I.; Sheltami, T.; Ahmad, I.; Yasar, A.U.-H.; Abdeen, M.A. RF-based UAV detection and identification using hierarchical learning approach. Sensors 2021, 21, 1947. [Google Scholar] [CrossRef]
- Mo, Y.; Huang, J.; Qian, G. Deep learning approach to UAV detection and classification by using compressively sensed RF signal. Sensors 2022, 22, 3072. [Google Scholar] [CrossRef]
- Zhang, H.; Li, T.; Li, Y.; Li, J.; Dobre, O.A.; Wen, Z. RF-based drone classification under complex electromagnetic environments using deep learning. IEEE Sensors Journal 2023, 23, 6099–6108. [Google Scholar]
- Alam, S.S.; Chakma, A.; Rahman, M.H.; Bin Mofidul, R.; Alam, M.M.; Utama, I.B.K.Y.; Jang, Y.M. Rf-enabled deep-learning-assisted drone detection and identification: An end-to-end approach. Sensors 2023, 23, 4202. [Google Scholar] [CrossRef] [PubMed]
- Ashush, N.; Greenberg, S.; Manor, E.; Ben-Shimol, Y. Unsupervised drones swarm characterization using RF signals analysis and machine learning methods. Sensors 2023, 23, 1589. [Google Scholar] [CrossRef] [PubMed]
- Sohal, R.S.; Grewal, V.; Singh, K.; Kaur, J. Deep learning approach for investigation of temporal radio frequency signatures of drones. International Journal of Communication Systems 2023, 36, e5377. [Google Scholar]
- Mandal, S.; Satija, U. Time–frequency multiscale convolutional neural network for RF-based drone detection and identification. IEEE Sensors Letters 2023, 7, 1–4. [Google Scholar]
- Lofù, D.; Di Gennaro, P.; Tedeschi, P.; Di Noia, T.; Di Sciascio, E. URANUS: Radio Frequency Tracking, Classification and Identification of Unmanned Aircraft Vehicles. IEEE Open Journal of Vehicular Technology 2023. [Google Scholar]
- Rahman, M.H.; Sejan, M.A.S.; Aziz, M.A.; Tabassum, R.; Baik, J.-I.; Song, H.-K. A Comprehensive Survey of Unmanned Aerial Vehicles Detection and Classification Using Machine Learning Approach: Challenges, Solutions, and Future Directions. Remote Sensing 2024, 16, 879. [Google Scholar]
- Itare, N.; Thomas, J.-H.; Raoof, K.; Blanchard, T. Acoustic estimation of the direction of arrival of an unmanned aerial vehicle based on frequency tracking in the time-frequency plane. Sensors 2022, 22, 4021. [Google Scholar] [CrossRef]
- Uddin, Z.; Qamar, A.; Alharbi, A.G.; Orakzai, F.A.; Ahmad, A. Detection of Multiple Drones in a Time-Varying Scenario Using Acoustic Signals. Sustainability 2022, 14, 4041. [Google Scholar] [CrossRef]
- Dhulashia, D.; Peters, N.; Horne, C.; Beasley, P.; Ritchie, M. Multi-frequency radar micro-doppler based classification of micro-drone payload weight. Frontiers in Signal Processing 2021, 1, 781777. [Google Scholar]
- Gong, J.; Li, D.; Yan, J.; Hu, H.; Kong, D. Comparison of radar signatures from a hybrid VTOL fixed-wing drone and quad-rotor drone. Drones 2022, 6, 110. [Google Scholar] [CrossRef]
- Gong, J.; Yan, J.; Hu, H.; Kong, D.; Li, D. Improved radar detection of small drones using doppler signal-to-clutter ratio (DSCR) detector. Drones 2023, 7, 316. [Google Scholar] [CrossRef]
- Gong, J.; Yan, J.; Li, D.; Kong, D. Detection of micro-Doppler signals of drones using radar systems with different radar dwell times. Drones 2022, 6, 262. [Google Scholar] [CrossRef]
- Kapoulas, I.K.; Hatziefremidis, A.; Baldoukas, A.; Valamontes, E.S.; Statharas, J. Small fixed-wing UAV radar cross-section signature investigation and detection and classification of distance estimation using realistic parameters of a commercial anti-drone system. Drones 2023, 7, 39. [Google Scholar] [CrossRef]
- Kumar, M.; Kelly, P.K. Non-Linear Signal Processing methods for UAV detections from a Multi-function X-band Radar. Drones 2023, 7, 251. [Google Scholar] [CrossRef]
- Rudys, S.; Ragulis, P.; Laučys, A.; Bručas, D.; Pomarnacki, R.; Plonis, D. Investigation of UAV detection by different solid-state marine radars. Electronics 2022, 11, 2502. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, L.; Liu, M. Using DTMB-Based Passive Radar for Small Unmanned Aerial Vehicle Detection. Wireless Communications and Mobile Computing 2021, 2021, 9987992. [Google Scholar]
- Xu, B.; Yi, J.; Cheng, F.; Gong, Z.; Wan, X. High-accuracy target tracking for multistatic passive radar based on a deep feedforward neural network. Frontiers of Information Technology & Electronic Engineering 2023, 24, 1214–1230. [Google Scholar]
- Češkovič, M.; Kurdel, P.; Gecejová, N.; Labun, J.; Gamcová, M.; Lehocký, M. A Reasonable Alternative System for Searching UAVs in the Local Area. Sensors 2022, 22, 3122. [Google Scholar] [CrossRef]
- Kashiyama, T.; Sobue, H.; Sekimoto, Y. Sky monitoring system for flying object detection using 4K resolution camera. Sensors 2020, 20, 7071. [Google Scholar] [CrossRef]
- Ghazlane, Y.; Hilali Alaoui, A.E.; Medomi, H.; Bnouachir, H. Real-Time Airborne Target Tracking using DeepSort Algorithm and Yolov7 Model. International Journal of Advanced Computer Science & Applications 2024, 15. [Google Scholar]
- Ajakwe, S.O.; Ihekoronye, V.U.; Kim, D.-S.; Lee, J.M. DRONET: Multi-tasking framework for real-time industrial facility aerial surveillance and safety. Drones 2022, 6, 46. [Google Scholar] [CrossRef]
- Zhang, Z.; Ouyang, W.; Gao, H.; Jing, X. Edge UAV Detection Based on Cyclic Spectral Feature: An Intelligent Scheme. Wireless Communications and Mobile Computing 2023, 2023, 3770982. [Google Scholar]
- Besada, J.A.; Carramiñana, D.; Bergesio, L.; Campaña, I.; Bernardos, A.M. Modelling and simulation of collaborative surveillance for unmanned traffic management. Sensors 2022, 22, 1498. [Google Scholar] [CrossRef]
- Dudczyk, J.; Czyba, R.; Skrzypczyk, K. Multi-sensory data fusion in terms of UAV detection in 3D space. Sensors 2022, 22, 4323. [Google Scholar] [CrossRef] [PubMed]
- Jamil, S.; Rahman, M.; Ullah, A.; Badnava, S.; Forsat, M.; Mirjavadi, S.S.; Fawad. Malicious UAV detection using integrated audio and visual features for public safety applications. Sensors 2020, 20, 3923. [Google Scholar] [CrossRef]
- Rodrigo, P.J.; Larsen, H.E.; Pedersen, C. CW coherent detection lidar for micro-Doppler sensing and raster-scan imaging of drones. Optics Express 2023, 31, 7398–7412. [Google Scholar]
- Saadaoui, F.Z.; Cheggaga, N.; Djabri, N.E.H. Multi-sensory system for UAVs detection using Bayesian inference. Applied Intelligence 2023, 53, 29818–29844. [Google Scholar]
- Shoufan, A.; Damiani, E. Contingency Clarification Protocols for Reliable Counter-Drone Operation. IEEE Transactions on Aerospace and Electronic Systems 2023. [Google Scholar]
- Svanström, F.; Alonso-Fernandez, F.; Englund, C. Drone detection and tracking in real-time by fusion of different sensing modalities. Drones 2022, 6, 317. [Google Scholar] [CrossRef]
- Yan, J.; Hu, H.; Gong, J.; Kong, D.; Li, D. Exploring Radar Micro-Doppler Signatures for Recognition of Drone Types. Drones 2023, 7, 280. [Google Scholar] [CrossRef]
- Yang, F.; Guo, J.; Zhu, R.; Le Kernec, J.; Liu, Q.; Zeng, T. Ground clutter mitigation for slow-time MIMO radar using independent component analysis. Remote Sensing 2022, 14, 6098. [Google Scholar]
- Kyritsis, A.; Makri, R.; Uzunoglu, N. Detection of Low RCS Unmanned Air Systems Using K-Band Continuous Wave Doppler Radar. Journal of Electrical and Computer Engineering 2023, 2023, 5683661. [Google Scholar]
- Martelli, T.; Colone, F.; Cardinali, R. DVB-T based passive radar for simultaneous counter-drone operations and civil air traffic surveillance. IET Radar, Sonar & Navigation 2020, 14, 505–515. [Google Scholar]
- Aouladhadj, D.; Kpre, E.; Deniau, V.; Kharchouf, A.; Gransart, C.; Gaquière, C. Drone Detection and Tracking Using RF Identification Signals. Sensors 2023, 23, 7650. [Google Scholar] [CrossRef] [PubMed]
- Morge-Rollet, L.; Le Jeune, D.; Le Roy, F.; Canaff, C.; Gautier, R. Drone detection and classification using physical-layer protocol statistical fingerprint. Sensors 2022, 22, 6701. [Google Scholar] [CrossRef] [PubMed]
- Mototolea, D.; Youssef, R.; Radoi, E.; Nicolaescu, I. Non-cooperative low-complexity detection approach for FHSS-GFSK drone control signals. IEEE Open Journal of the Communications Society 2020, 1, 401–412. [Google Scholar]
- Basan, E.; Pshikhopov, V.; Lapina, M.; Mecella, M. Analysis of methods and systems for detecting and countering uavs. In Proceedings of the IOP Conference Series: Materials Science and Engineering; 2021; p. 012034. [Google Scholar]
- Kumawat, H.C.; Raj, A.A.B. SP-WVD with adaptive-filter-bank-supported RF sensor for low RCS targets’ nonlinear micro-Doppler signature/pattern imaging system. Sensors 2022, 22, 1186. [Google Scholar] [CrossRef] [PubMed]
- Delleji, T.; Slimeni, F.; Fekih, H.; Jarray, A.; Boughanmi, W.; Kallel, A.; Chtourou, Z. An upgraded-yolo with object augmentation: Mini-uav detection under low-visibility conditions by improving deep neural networks. In Proceedings of the Operations Research Forum, 2022; p. 60.
- Han, Z.; Zhang, C.; Feng, H.; Yue, M.; Quan, K. PFFNET: A Fast Progressive Feature Fusion Network for Detecting Drones in Infrared Images. Drones 2023, 7, 424. [Google Scholar] [CrossRef]
- Cheng, F.; Liang, Z.; Peng, G.; Liu, S.; Li, S.; Ji, M. An anti-UAV long-term tracking method with hybrid attention mechanism and hierarchical discriminator. Sensors 2022, 22, 3701. [Google Scholar] [CrossRef] [PubMed]
- Kang, C.; Chaudhry, H.; Woolsey, C.A.; Kochersberger, K. Development of a peripheral–central vision system for small unmanned aircraft tracking. Journal of Aerospace Information Systems 2021, 18, 645–658. [Google Scholar]
- Lv, Y.; Ai, Z.; Chen, M.; Gong, X.; Wang, Y.; Lu, Z. High-resolution drone detection based on background difference and SAG-Yolov5s. Sensors 2022, 22, 5825. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, L.; Wu, H.; Qin, J.; He, L.; Yang, G.; Zhang, H.; Zhang, J. Trajectory and image-based detection and identification of UAV. The Visual Computer 2021, 37, 1769–1780. [Google Scholar]
- Ojdanić, D.; Sinn, A.; Naverschnigg, C.; Schitter, G. Feasibility analysis of optical UAV detection over long distances using robotic telescopes. IEEE Transactions on Aerospace and Electronic Systems 2023, 59, 5148–5157. [Google Scholar]
- Seidaliyeva, U.; Akhmetov, D.; Ilipbayeva, L.; Matson, E.T. Real-time and accurate drone detection in a video with a static background. Sensors 2020, 20, 3856. [Google Scholar] [CrossRef]
- Son, S.; Lee, I.; Cha, J.; Choi, H. Online Learning-Based Hybrid Tracking Method for Unmanned Aerial Vehicles. Sensors 2023, 23, 3270. [Google Scholar] [CrossRef]
- Wisniewski, M.; Rana, Z.A.; Petrunin, I. Drone model classification using convolutional neural network trained on synthetic data. Journal of Imaging 2022, 8, 218. [Google Scholar]
- You, J.; Ye, Z.; Gu, J.; Pu, J. UAV-Pose: A Dual Capture Network Algorithm for Low Altitude UAV Attitude Detection and Tracking. IEEE Access 2023, 11, 129144–129155. [Google Scholar]
- Cai, H.; Xie, Y.; Xu, J.; Xiong, Z. A lightweight and accurate uav detection method based on yolov4. Sensors 2022, 22, 6874. [Google Scholar] [CrossRef]
- Di Cecio, G.; Manco, A.; Gigante, G. On-board drone classification with Deep Learning and System-on-Chip implementation. In Proceedings of the Journal of Physics: Conference Series, 2024; p. 012059.
- Çetin, E.; Barrado, C.; Pastor, E. Improving real-time drone detection for counter-drone systems. The Aeronautical Journal 2021, 125, 1871–1896. [Google Scholar]
- Çetin, E.; Barrado, C.; Pastor, E. Counter a drone in a complex neighborhood area by deep reinforcement learning. Sensors 2020, 20, 2320. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Kim, J.; Lee, H.-G.; Choi, J.; Fan, J.; Joung, J. UAV chasing based on YOLOv3 and object tracker for counter UAV systems. IEEE Access 2023, 11, 34659–34673. [Google Scholar]
- Chen, C.; Zheng, Z.; Xu, T.; Guo, S.; Feng, S.; Yao, W.; Lan, Y. Yolo-based uav technology: A review of the research and its applications. Drones 2023, 7, 190. [Google Scholar] [CrossRef]
- Pittu, V. S. R.; Nelakuditi, U. R.; Bandla, P.; Thotakura, Y. DL based multi-class drone classification for counter drone detection applications. SSRG International Journal of Electrical and Electronics Engineering 2023, 10(11), 21–30. [Google Scholar]
- Vidyadhara, B.; Tony, L.A.; Gadde, M.S.; Jana, S.; Varun, V.; Bhise, A.A.; Sundaram, S.; Ghose, D. Design and integration of a drone based passive manipulator for capturing flying targets. Robotica 2022, 40, 2349–2364. [Google Scholar]
- Liu, Y.; Xiong, Z.; Qiu, Y.; Yan, F.; Ma, C. Analysis of Traction and Unfolding Dynamics of Space-Symmetric Flexible Webs for UAV Interception and Capture. Symmetry 2022, 14, 1915. [Google Scholar] [CrossRef]
- Ameloot, C.; Robbe, C.; Papy, A.; Hendrick, P. Modeling complex behavior of multi-projectile counter UAV 12 gauge ammunition. Human Factors and Mechanical Engineering for Defense and Safety 2022, 6, 3. [Google Scholar]
- Belousov, A.O.; Zhechev, Y.S.; Chernikova, E.B.; Nosov, A.V.; Gazizov, T.R. UAVs protection and countermeasures in a complex electromagnetic environment. Complexity 2022, 2022, 8539326. [Google Scholar]
- Chae, M.-H.; Park, S.-O.; Choi, S.-H.; Choi, C.-T. Reinforcement Learning-Based Counter Fixed-Wing Drone System Using GNSS Deception. IEEE Access 2024. [Google Scholar]
- Fu, H.; Liu, H.H.-T. Guarding a territory against an intelligent intruder: Strategy design and experimental verification. IEEE/ASME Transactions on Mechatronics 2020, 25, 1765–1772. [Google Scholar]
- Çetin, E.; Barrado, C.; Pastor, E. Countering a drone in a 3d space: Analyzing deep reinforcement learning methods. Sensors 2022, 22, 8863. [Google Scholar] [CrossRef] [PubMed]
- Brust, M.R.; Danoy, G.; Stolfi, D.H.; Bouvry, P. Swarm-based counter UAV defense system. Discover Internet of Things 2021, 1, 1–19. [Google Scholar]
- Pierre, J.-E.; Sun, X.; Fierro, R. Multi-agent partial observable safe reinforcement learning for counter uncrewed aerial systems. IEEE Access 2023. [Google Scholar]
- Souli, N.; Kolios, P.; Ellinas, G. Multi-agent system for rogue drone interception. IEEE Robotics and Automation Letters 2023, 8, 2221–2228. [Google Scholar]
- Lee, C.H.; Thiessen, C.; Van Bossuyt, D.L.; Hale, B. A systems analysis of energy usage and effectiveness of a counter-unmanned aerial system using a cyber-attack approach. Drones 2022, 6, 198. [Google Scholar] [CrossRef]
- Valianti, P.; Papaioannou, S.; Kolios, P.; Ellinas, G. Multi-agent coordinated close-in jamming for disabling a rogue drone. IEEE Transactions on Mobile Computing 2021, 21, 3700–3717. [Google Scholar]
- Gao, Y.; Li, G. A GNSS instrumentation covert directional spoofing algorithm for UAV equipped with tightly-coupled GNSS/IMU. IEEE Transactions on Instrumentation and Measurement 2023, 72, 1–13. [Google Scholar]
- Siddhardha, K.; Ratnoo, A. Intercepting Intruder on a Circular Boundary. Journal of Guidance, Control, and Dynamics 2023, 46, 186–197. [Google Scholar]
- Luo, R.; He, G.; Bu, X.; Shi, J. Cooperative Guidance Law for the Mother-Cabin of the Anti-UAV Cluster Mother-Son Missile. Applied Sciences 2023, 13, 5397. [Google Scholar]
- Fu, H.; Liu, H.H.-T. An isochron-based solution to the target defense game against a faster invader. IEEE Control Systems Letters 2021, 6, 1352–1357. [Google Scholar]
- Fu, H.; Liu, H.H.-T. Defending a target area with a slower defender. IEEE Control Systems Letters 2022, 7, 661–666. [Google Scholar]
- Rudys, S.; Laučys, A.; Ragulis, P.; Aleksiejūnas, R.; Stankevičius, K.; Kinka, M.; Razgūnas, M.; Bručas, D.; Udris, D.; Pomarnacki, R. Hostile UAV detection and neutralization using a UAV system. Drones 2022, 6, 250. [Google Scholar] [CrossRef]
- Martinez-Carranza, J.; Rascon, C. A review on auditory perception for unmanned aerial vehicles. Sensors 2020, 20, 7276. [Google Scholar] [CrossRef]
- Chen, J.; Huang, B.; Li, J.; Wang, Y.; Ren, M.; Xu, T. Learning spatio-temporal attention based siamese network for tracking UAVs in the wild. Remote Sensing 2022, 14, 1797. [Google Scholar]
- Chen, Y.; Jiao, Y.; Wu, M.; Ma, H.; Lu, Z. Group Target Tracking for Highly Maneuverable Unmanned Aerial Vehicles Swarms: A Perspective. Sensors 2023, 23, 4465. [Google Scholar] [CrossRef] [PubMed]
- Jačionis, T. Modern methods for detection of unmanned aerial vehicles. Mokslas–Lietuvos ateitis/Science–Future of Lithuania 2020, 12. [Google Scholar]
- Khawaja, W.; Semkin, V.; Ratyal, N.I.; Yaqoob, Q.; Gul, J.; Guvenc, I. Threats from and countermeasures for unmanned aerial and underwater vehicles. Sensors 2022, 22, 3896. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Hong, J.; Shim, W.; Jung, D.-J. Multi-object tracking on swir images for city surveillance in an edge-computing environment. Sensors 2023, 23, 6373. [Google Scholar] [CrossRef]
- Rojhani, N.; Shaker, G. Comprehensive Review: Effectiveness of MIMO and Beamforming Technologies in Detecting Low RCS UAVs. Remote Sensing 2024, 16, 1016. [Google Scholar]
- Sahay, R.; Stubbs, J.J.; Brinton, C.G.; Birch, G.C. An uncertainty quantification framework for counter unmanned aircraft systems using deep ensembles. IEEE Sensors Journal 2022, 22, 20896–20909. [Google Scholar]
- Seidaliyeva, U.; Ilipbayeva, L.; Taissariyeva, K.; Smailov, N.; Matson, E.T. Advances and challenges in drone detection and classification techniques: A state-of-the-art review. Sensors 2023, 24, 125. [Google Scholar] [CrossRef] [PubMed]
- Varshosaz, M.; Afary, A.; Mojaradi, B.; Saadatseresht, M.; Ghanbari Parmehr, E. Spoofing detection of civilian UAVs using visual odometry. ISPRS International Journal of Geo-Information 2019, 9, 6. [Google Scholar]
- Yan, X.; Fu, T.; Lin, H.; Xuan, F.; Huang, Y.; Cao, Y.; Hu, H.; Liu, P. UAV Detection and Tracking in Urban Environments Using Passive Sensors: A Survey. Applied Sciences 2023, 13, 11320. [Google Scholar]
- Yousaf, J.; Zia, H.; Alhalabi, M.; Yaghi, M.; Basmaji, T.; Shehhi, E.A.; Gad, A.; Alkhedher, M.; Ghazal, M. Drone and controller detection and localization: Trends and challenges. Applied Sciences 2022, 12, 12612. [Google Scholar]
- Chakravarthy, A.; Ghose, D. Collision cone-based net capture of a swarm of unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics 2020, 43, 1688–1710. [Google Scholar]
- Ma, J.; Chen, P.; Xiong, X.; Zhang, L.; Yu, S.; Zhang, D. Research on Vision-Based Servoing and Trajectory Prediction Strategy for Capturing Illegal Drones. Drones 2024, 8, 127. [Google Scholar] [CrossRef]
- Pärlin, K.; Riihonen, T.; Le Nir, V.; Adrat, M. Physical-layer reliability of drones and their counter-measures: Full vs. half duplex. IEEE Transactions on Wireless Communications 2023. [Google Scholar]
- Tan, C.S.; Van Bossuyt, D.L.; Hale, B. System analysis of counter-unmanned aerial systems kill chain in an operational environment. Systems 2021, 9, 79. [Google Scholar] [CrossRef]
- Su, Z.-L.; Jiang, X.-L.; Li, N.; Ling, H.-F.; Zheng, Y.-J. optimization of false target jamming against UAV detection. Drones 2022, 6, 114. [Google Scholar] [CrossRef]
- Cline, T.L.; Dietz, J.E. Agent based modeling for low-cost counter UAS protocol in prisons. International Journal of Aviation, Aeronautics, and Aerospace 2020, 7, 2. [Google Scholar]
- Espada, C.G. Counter-Drone Defense Systems in the Light of International Law. The Journal of Applied Business and Economics 2020, 22, 105–118. [Google Scholar]
- Chiper, F.-L.; Martian, A.; Vladeanu, C.; Marghescu, I.; Craciunescu, R.; Fratu, O. Drone detection and defense systems: Survey and a software-defined radio-based solution. Sensors 2022, 22, 1453. [Google Scholar] [CrossRef]
- Fortune, D.; Nitsch, H.; Staniforth, A. Countermeasures for combatting the terrorist use of aerial drones—Bringing research and innovation to operational reality. Internal Security 2022, 14, 173–181. [Google Scholar]
- Hao, Q.; Li, W.; Qiu, Z.; Zhang, J. Research on anti UAV swarm system in prevention of the important place. In Proceedings of the Journal of Physics: Conference Series, 2020; p. 052020.
- Kootala, A.; Mousa, A.; Pong, P.W. Drones are Endangering Energy Critical Infrastructure, and How We Can Deal with This. Energies 2023, 16, 5521. [Google Scholar] [CrossRef]
- Nallamalli, R.; Singh, K.; Kumar, I.D. Technological perspectives of countering uav swarms. Defence Science Journal 2023, 73. [Google Scholar]
- Pascarella, D.; Gigante, G.; Vozella, A.; Sodano, M.; Ippolito, M.; Bieber, P.; Dubot, T.; Martinavarro, E. Evaluation of a Resilience-Driven Operational Concept to Manage Drone Intrusions in Airports. Information 2023, 14, 239. [Google Scholar] [CrossRef]
- Su, B.; Liu, H.; Zhang, G. Anti-UAV group effectiveness evaluation based on fuzzy analytic hierarchy process. In Proceedings of the Journal of Physics: Conference Series, 2021; p. 022098.
- Tianfeng, F.; Xiaojing, M.; Chi, Z. Development status of anti UAV swarm and analysis of new defense system. In Proceedings of the Journal of Physics: Conference Series, 2023; p. 092011.
- Kashi, R.N.; Prashanth, A.; Kashi, S.R.; Prabhakara, G. A survey and analysis of drone detection systems using a systems approach superposed on scenarios. Systems Engineering 2024, 27, 598–636. [Google Scholar]
Figure 1.
Counter-UAS keywords network.
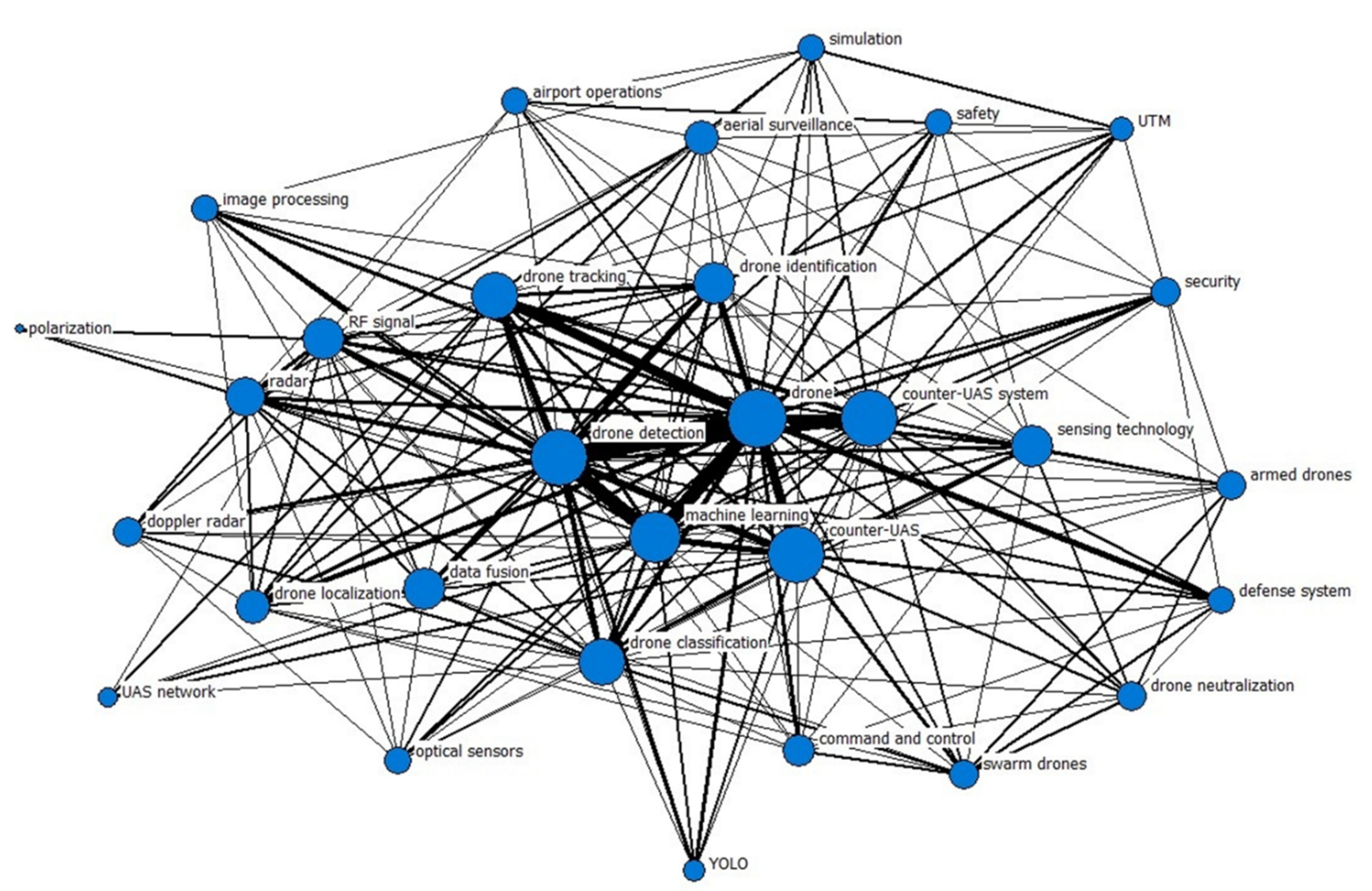
Figure 2.
Connection Matrix of Drone-related Keywords.
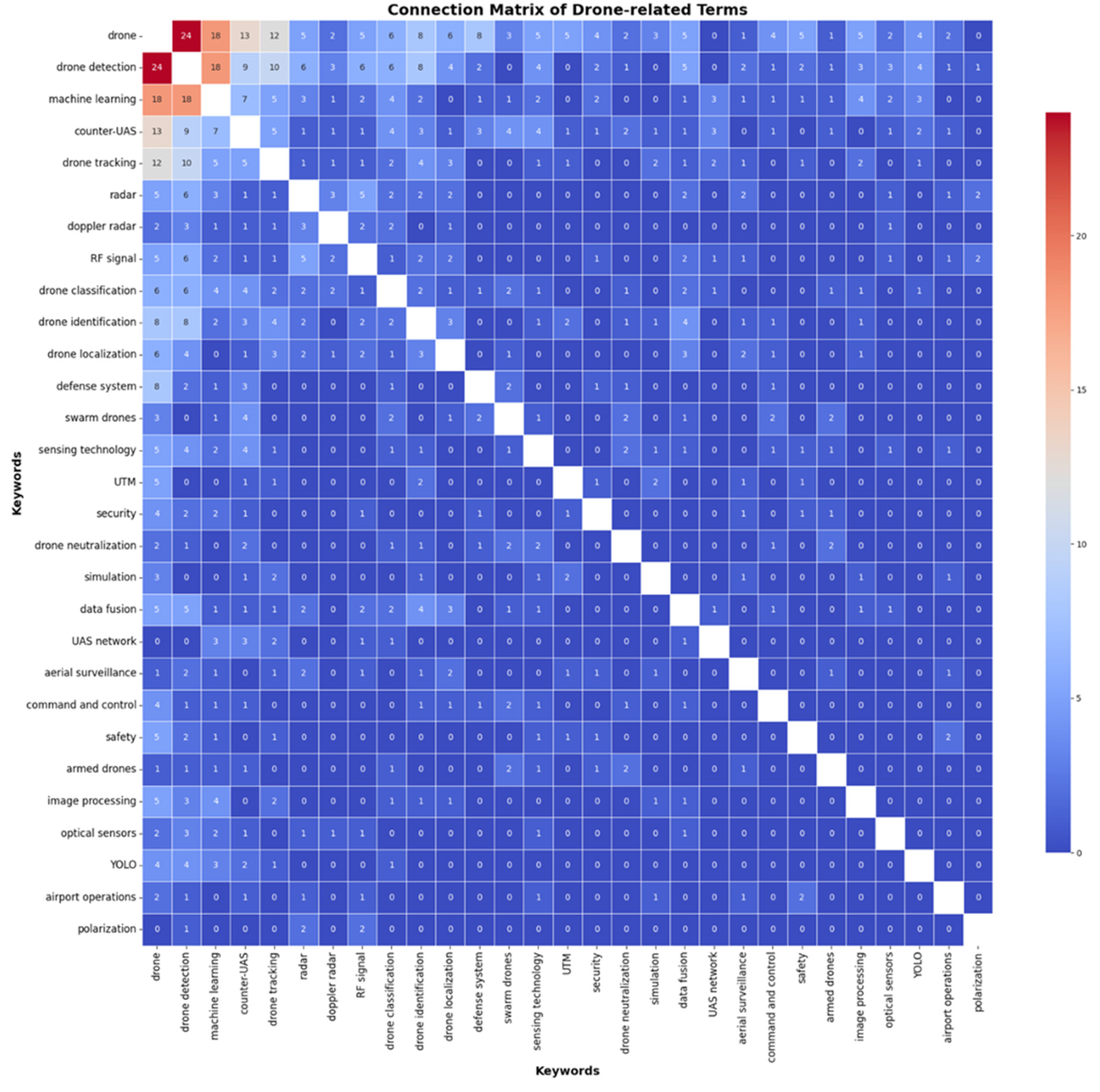
Figure 3.
Geographic Distribution of C-UAS-related Papers.
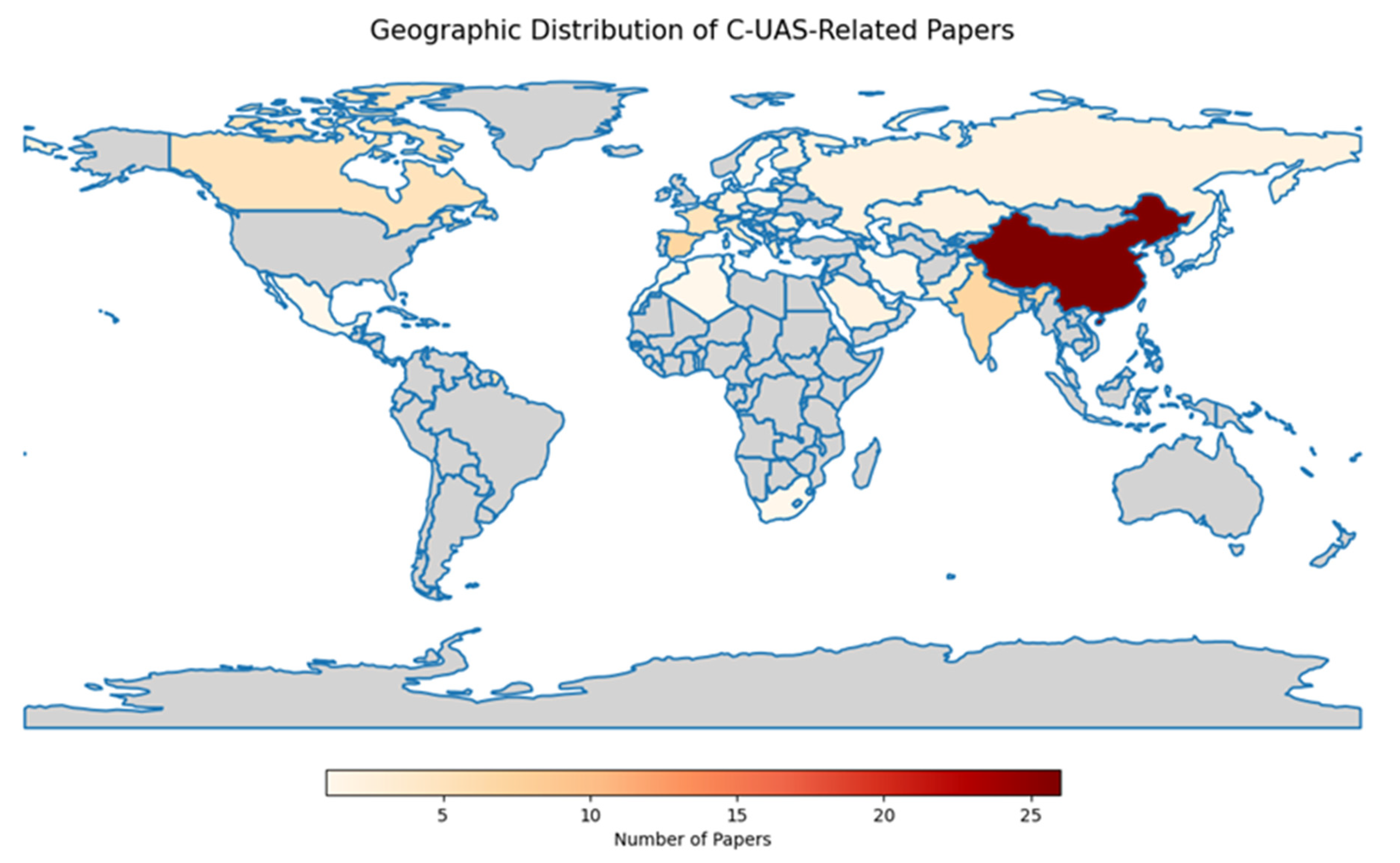
Figure 4.
Sankey diagram for the scoping review on counter UAS studies.
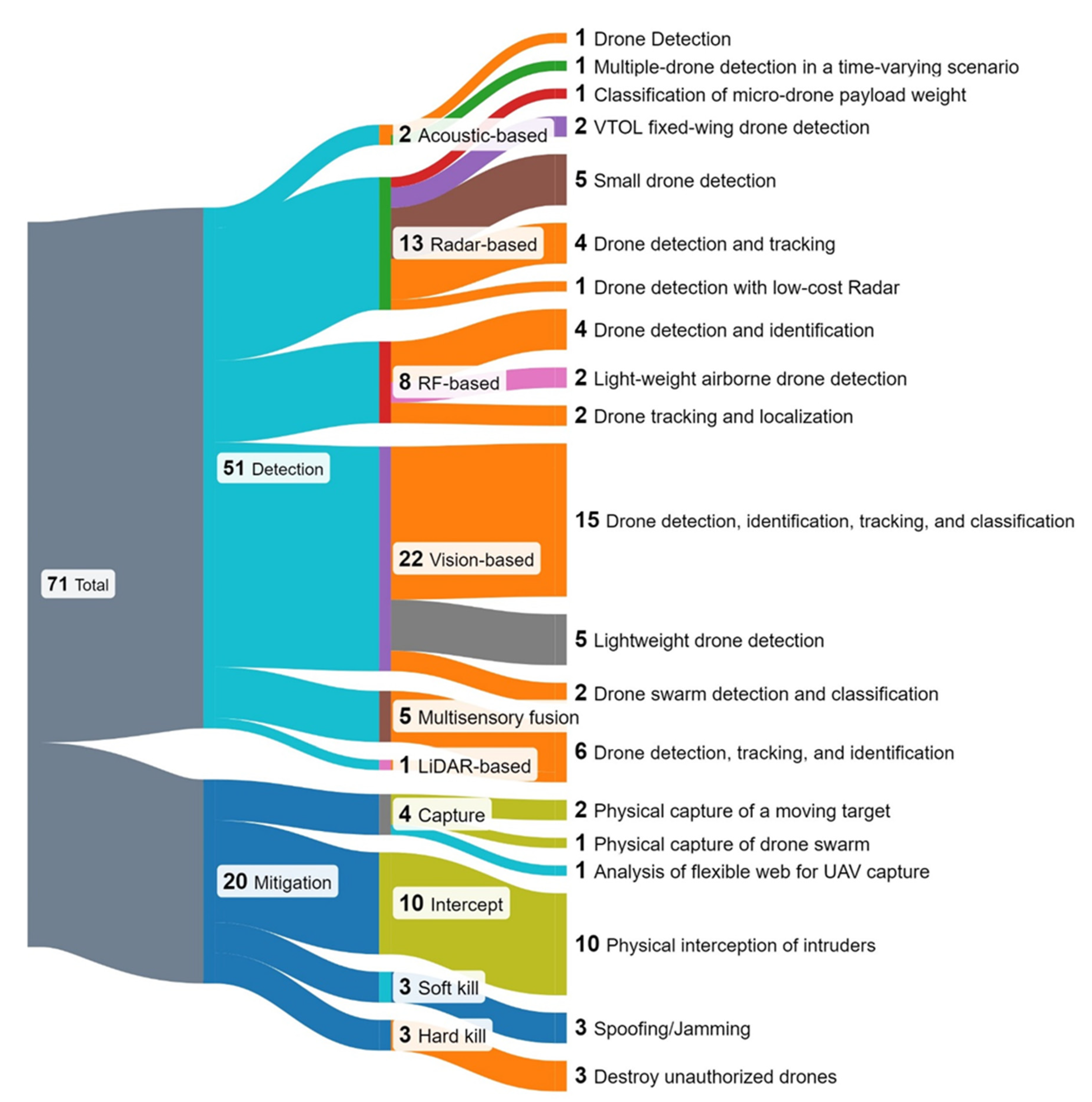
Table 2.
Most frequent keywords.
| Category | Keywords | Closeness Centrality |
|---|---|---|
| Core | Drone | 0.935 |
| Drone detection | 0.879 | |
| Counter-UAS | 0.879 | |
| Counter-UAS system | 0.879 | |
| Machine learning | 0.829 | |
| Drone tracking | 0.763 | |
| Drone classification | 0.763 | |
| Semi-periphery | RF signal | 0.725 |
| Drone identification | 0.725 | |
| Sense technology | 0.707 | |
| Data fusion | 0.707 | |
| Radar | 0.690 | |
| Drone localization | 0.659 | |
| Aerial surveillance | 0.659 | |
| Command and control | 0.63 | |
| Periphery | Doppler radar | 0.617 |
| Swarm drones | 0.617 | |
| Security | 0.617 | |
| Drone neutralization | 0.617 | |
| Armed drones | 0.617 | |
| Defense system | 0.604 | |
| Optical sensors | 0.604 | |
| Airport operations | 0.604 | |
| Simulation | 0.592 | |
| safety | 0.592 | |
| Image processing | 0.592 | |
| UTM | 0.58 | |
| YOLO | 0.569 | |
| UAS network | 0.558 | |
| Polarization | 0.500 |
Table 3.
Strong connections between core keywords and other keywords.
| Core Keywords | Drone detection | Machine learning | Drone tracking | Drone classification |
|---|---|---|---|---|
| Other keywords | Machine learning | Drone tracking | Drone identification | Radar |
| Drone tracking | Drone classification | Drone localization | RF signal | |
| Drone identification | Image processing | Drone classification | Swarm drones | |
| Drone classification | Data fusion | |||
| Radar | ||||
| RF signal | ||||
| Data fusion |
Table 4.
Weak connections between core keywords and other keywords.
| Core Keywords | Drone detection | Machine learning | Drone tracking | Drone classification |
|---|---|---|---|---|
| Other keywords | Swarm drones | Drone identification | Swarm drones | UTM |
| UTM | Drone neutralization | Command and control | Safety | |
| UAS network | Command and control | Drone neutralization | Security | |
| Airport operations | Data fusion | Command and control | ||
| RF signal |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



