
Submitted:
22 August 2024
Posted:
23 August 2024
You are already at the latest version
Abstract
When a circular body is immersed in a fluid, its interaction with the surrounding water leads to the formation of waves and ripples. This fascinating phenomenon is primarily driven by the fluid encountering a crucial point on the body, known as the complex centre of pressure (iCoP). This point acts as a threshold that instigates disturbances in the fluid, illustrating why the body affects the fluid dynamics even before it is fully submerged. The concept of the iCoP introduces a new dimension to our understanding of fluid dynamics defined by the equation as . The iCoP is symmetric and dependent solely on the diameter of the body, which enables it to pinpoint where fluid disturbances originate in the water. The immersion depth and oscillatory behaviour of the circular body are described by . Here, signifies that the body should be half-immersed, with its centre positioned halfway below the waterline, while the term indicates that the body’s oscillatory movement, with an amplitude of , causes the body to move up and down from this equilibrium position which makes the body not to be totally half immersed as indicated by . Consequently, the immersion depth varies and reflecting both partial immersion and dynamic oscillation. The real part of the iCoP reveals critical locations for fluid displacement, which leads to wave formation, while the imaginary part uncovers the phase shifts that describe the body’s dynamic interaction with fluid motion.
Keywords:
Complex Centre of Pressure (iCoP)
; phase shifts
; oscillations
; immersion depth
; circular body
; waves and ripples
; fluid dynamics
; fluid-structure system
Introduction
In fluid dynamics, the interaction between immersed bodies and their surrounding fluid is fundamental to understanding phenomena such as stability, buoyancy, and pressure distribution. Traditionally, the centre of pressure (CoP) has been used to determine how forces are distributed on an immersed body, influencing its stability and motion (Kim et al, 2019). However, conventional models often fall short in capturing the complexities of fluid-body interactions, particularly when dealing with varying immersion depths (Nicolaou et al., 2015). We introduce a simplified centre of pressure (CoP) equation for fluid-structure interactions, using a three-ball model to illustrate key dynamics of CoP oscillation between and, simplifying the analysis of fluid-structure systems. Our method also reveals the idea of real change and ideal change with a streamlined approach to reduce computational complexity and enhances interpretability, providing clearer insights into the dynamic behaviour of immersed circular bodies for engineering designs.
This study introduces the concept of the Complex Centre of Pressure (iCoP), a novel theoretical concept that expands our understanding of how immersed circular bodies interact with fluid environments. The iCoP represents a dynamic and oscillating point that reflects the complex interplay between the body and fluid motion leading to the generation of waves and ripples. By analysing the iCoP, this research aims to address existing gaps in fluid dynamics theories and offer a more comprehensive model for pressure distribution and fluid behaviours. The significance of this study lies in its potential to transform our understanding of fluid dynamics with iCoP providing new insights into how bodies induce disturbances in the fluid. This new perspective not only enhances our theoretical knowledge but also holds practical implications for fields such as ocean engineering, submarine design, and any domain where precise control of pressure distribution is critical.
This research aims to derive an equation for the iCoP and explain its relevance in real-life phenomena, analyse the behaviour of fluids with varying immersion depths using the modification equation for CoP. By addressing these objectives, this study seeks to uncover new aspects of fluid-body interactions and contribute valuable insights to the field of fluid dynamics. Through the development of simplified Centre of Pressure (CoP) equations and the refinement of fluid-structure interaction models, the research aspires to provide valuable contributions to fluid dynamics.
Methodology
We simplified the fundamental center of pressure equation, = + to arrive at a new and more simplified center of pressure equations as shown below.
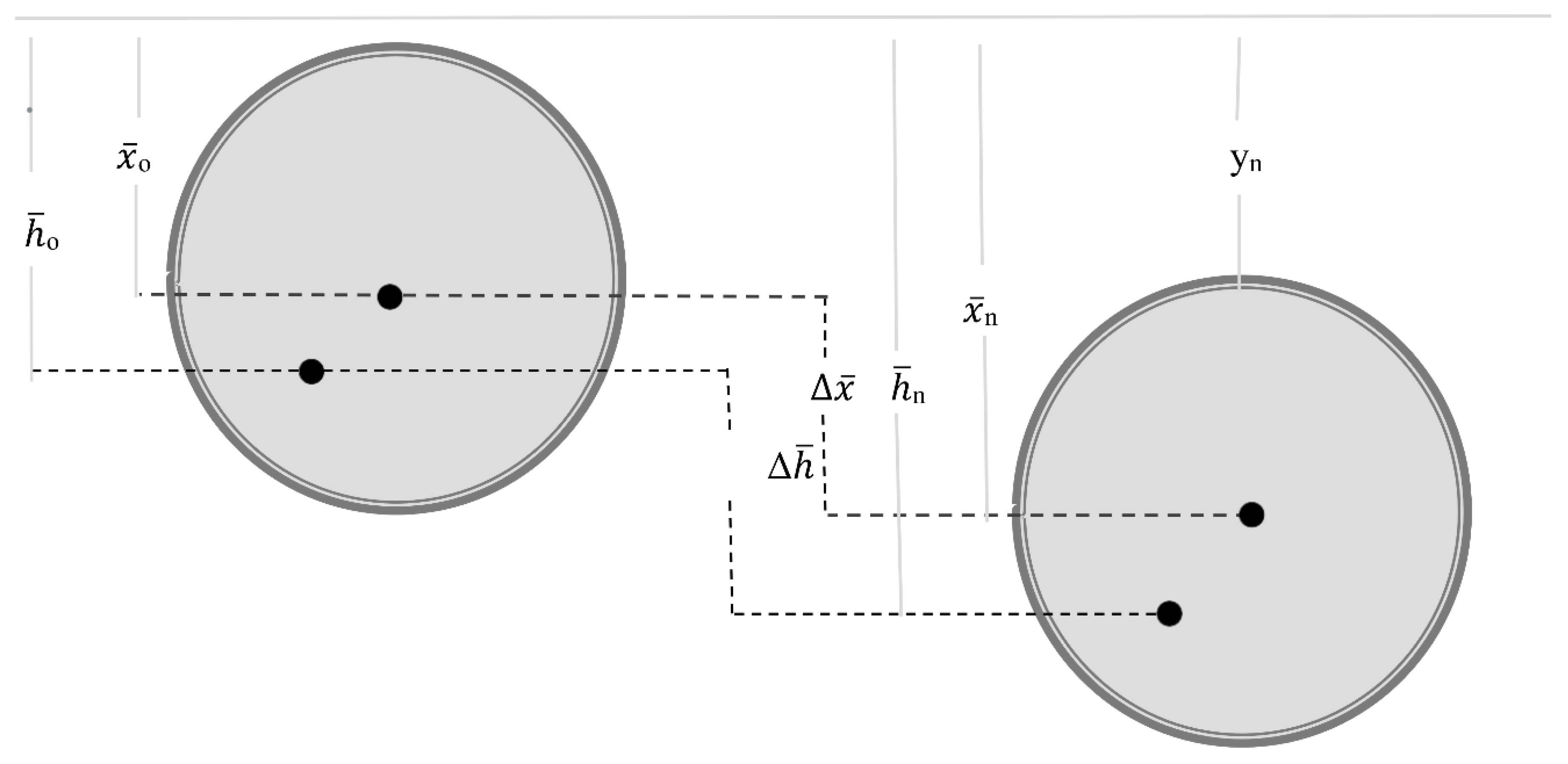
Consider an immersed circular body as shown below:
Figure 1.
Immersed circular body.
Observations and Assumptions:
- When there’s no immersion depth (y = yo = 0), then =o and =o
- =no and =no; (no, no for yn ≥ yo and y: R+ ≥ 0)
- n = n ; n >n ; (n,n ) ≠ 0
- The circular body must be uniform
- It is not valid for immersion at an angle
- No external force is applied
Definition of Parameters:
All parameters are measured in meters (m)
- o = Initial center of pressure when there’s no immersed depth, y = 0
- n = Center of pressure when there’s an immersed depth at any point, yn
- o = Center of gravity when there’s no immersed depth, y = 0
- n = Center of gravity when there’s an immersed depth at any point, yn
- y = Immersed depth of the immersed body below the free surface
From the fundamental equation for the center of pressure,
where Ig, A, , is the moment of inertia, area, center of pressure, and center of gravity, respectively.
Mathematically;
From the observations of the immersed body diagram, n
By substituting and simplifying:
When the circular immersed body is touching the free surface, the immersion depth,
3.1. Distance BETWEEN Center of Pressure & Center of Gravity
- Center of pressure, can simply be defined as the point where pressure tends to act most.
- Similarly, center of gravity, can be defined as the point where force of gravity tends to act most (Smith et al., 2016)
Figure 2.
Distance Between Center of Pressure & Center of Gravity.
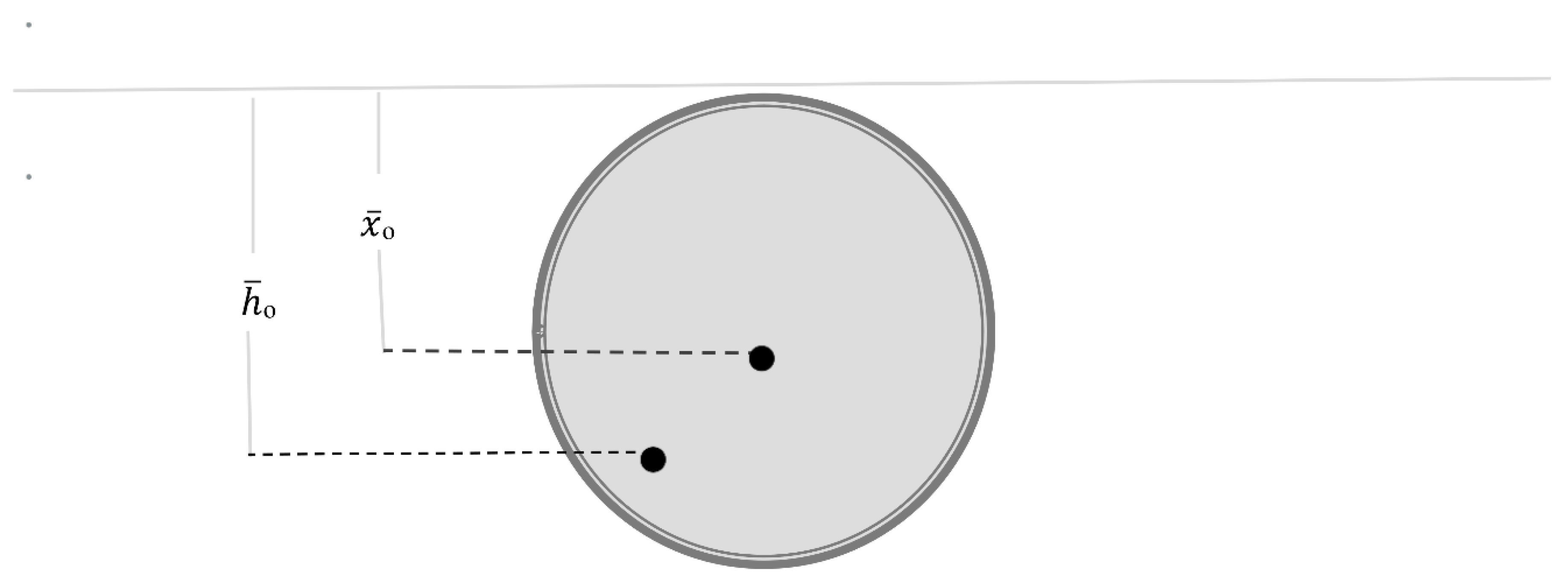
From the above diagram, y = 0 ⸫ o = and o = as can be seen from the derivations.
Therefore, the distance between o and o = ͞
| o - o = or d = 8 (o - o) | (6) |
The distance between o - o can only be calculated just before the body starts to sink. In other words, when the immersed depth, y = 0
3.1. Change as an Influence of Immersion Depth on Center of Pressure Position
- Real change of CoP
| = = k1 | (7) |
k1 signifies the constant that expresses the real change of CoP of the immersed body.
- b.
- Ideal Change in CoP
| = ƒ (y) | (8) |
where is the dependent variable and y is the independent variable. From equation 7 we can differentiate the center of pressure, with respect to the immersion depth, y by applying the quotient rule (Chen, 2012)
| = where | (9) |
| ⸫ = | (10) |
where;
, and ,
NB: Differentiating a constant = 0 and since the diameter is a constant (it doesn’t change)
⸫ ƒ' (d) = 0
Let and Δy be used as the differential since dy has been used as the product of diameter and vertical distance. By applying quotient rule and simplifying the expression, we can see that the center of pressure changes with respect to the vertical distance as given below:
From equation 9, we can conclude that the:
| Ideal Change in CoP k2 | (11) |
where k2 signifies the constant that expresses the ideal change of CoP of the immersed body.
However, we can simplify equation 10 even further by applying long-division method since the numerator and denominator have the same degree of terms (Nor Arzemi et al., 2010).
| Long Division method | (12) |
where;
| = + | (13) |
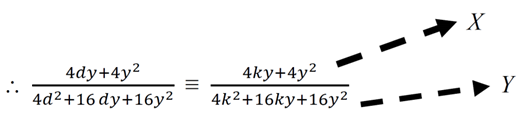
- i.
- Let X = 0
⸫ = 0
or 0 (where d is the diameter of the body, see the first and last balls below)
- ii.
- Let Y = 0
| ⸪ | (14) |
y = (this explains the movement of the middle ball)
3.1.1. Derivation of Complex Center of Pressure (iCoP) Equation
The new model for CoP has a numerator and denominator with y and d terms in both linear and quadratic manner as shown below:
=
- STEP ONE: Solution of the Quadratic Equation (Numerator)
To solve the equation, we first focus on the quadratic expression in the numerator:
= 0
2 + + = 0
Where a = b = c = 2
The general solution for a quadratic equation is given by the quadratic formula (López et al., 2015):
| y = |
Substituting the values for a, b and c:
| y = |
Simplifying the expression:
| y = | (15) |
Therefore, y1 =
| y2 = |
- b. STEP TWO: Substitution of y1 and y2 into the Original Equation
| = |
Case 1: Substituting y1 = Numerator Calculation:
| ()2 = | |
| + = |
Denominator Calculation:
Substitute into the CoP equation (equation 9):
| = | |
| = |
Evaluating the imaginary part:
Evaluating the real part:
| ⸫ = |
Case 2: Substituting y2 =
Numerator Calculation:
| ()2 = | |
| + = |
Denominator Calculation:
Substitute into the CoP equation (equation 9):
| = | |
| = |
Evaluating the imaginary part:
Evaluating the real part:
| ⸫ = |
⸫ The i-center of pressure (iCoP) which is a function of the diameter of the body is given as
| = | (16) |
3. Results and Discussion
3.1. Change as an Influence of Immersion Depth on Center of Pressure Position
It’s obvious that the center of pressure is directly proportional to the vertical distance, so when the immersion depth changes, the center of pressure, CoP changes as well (Zemlyak et al., 2022)
Real change of CoP = = k1. k1 signifies the constant that expresses the real change of CoP of the immersed body. From the above equations, since the center of pressure changes when the immersion depth changes, then the center of pressure is a function of the immersion depth (Maleki et al., 2022; Jasim et al., 2020).
| Ideal Change in CoP k2 |
We observe that k1 > k2 (this may be due to the effect of temperature, pressure, viscosity, density, or impurities)
The deviation of the real change, k1 from the ideal change, k2 is given as:
| = k1 – k2 |
From the analysis, it is evident that the centre of pressure (CoP) for an immersed body varies with immersion depth (Podryabinkin et al., 2014). From the equations 7 and 11 respectively, 1 and 2, we observe that CoP is indeed a function of the immersion depth. Here, 1 represents the real change, which is influenced by factors like temperature, pressure, viscosity, density, and impurities. On the other hand, 2 signifies the ideal change, assuming these external factors are not present. The distinction between 1 and 2, quantified as 2 highlights the deviation caused by real-world conditions. This difference is critical for applications where precise control of pressure distribution is necessary, such as in ocean engineering and submarine design. By applying the quotient rule to differentiate the CoP with respect to immersion depth, we obtain a non-linear two-sided quadratic relationship that captures how immersion depth affects the centre of pressure.
The derived equation demonstrates that the ideal change of CoP which is represented by 2, while 1 reflects the real change. The real change, 1, is greater than the ideal change, 2, due to the influence of external factors. This insight enriches our understanding of the CoP dynamics and provides valuable information for designing systems that require accurate pressure control.
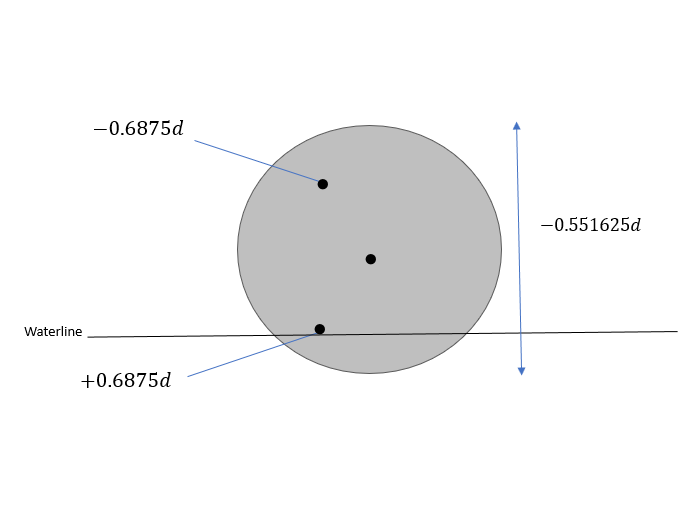
Immersion Depth Convention (From Figure 3)
In this model, the water surface is the reference axis for measuring vertical distances. The convention is as follows (Molland, 2008):
- Positive vertical distances indicate the body is submerged below the water surface.
- Negative vertical distances indicate the body has emerged above the water surface.
- When floating, the vertical distance is negative, indicating an upward direction.
- When sinking, the vertical distance is positive, indicating a downward direction.
Figure 3.
Different positions of the ball in the water medium.
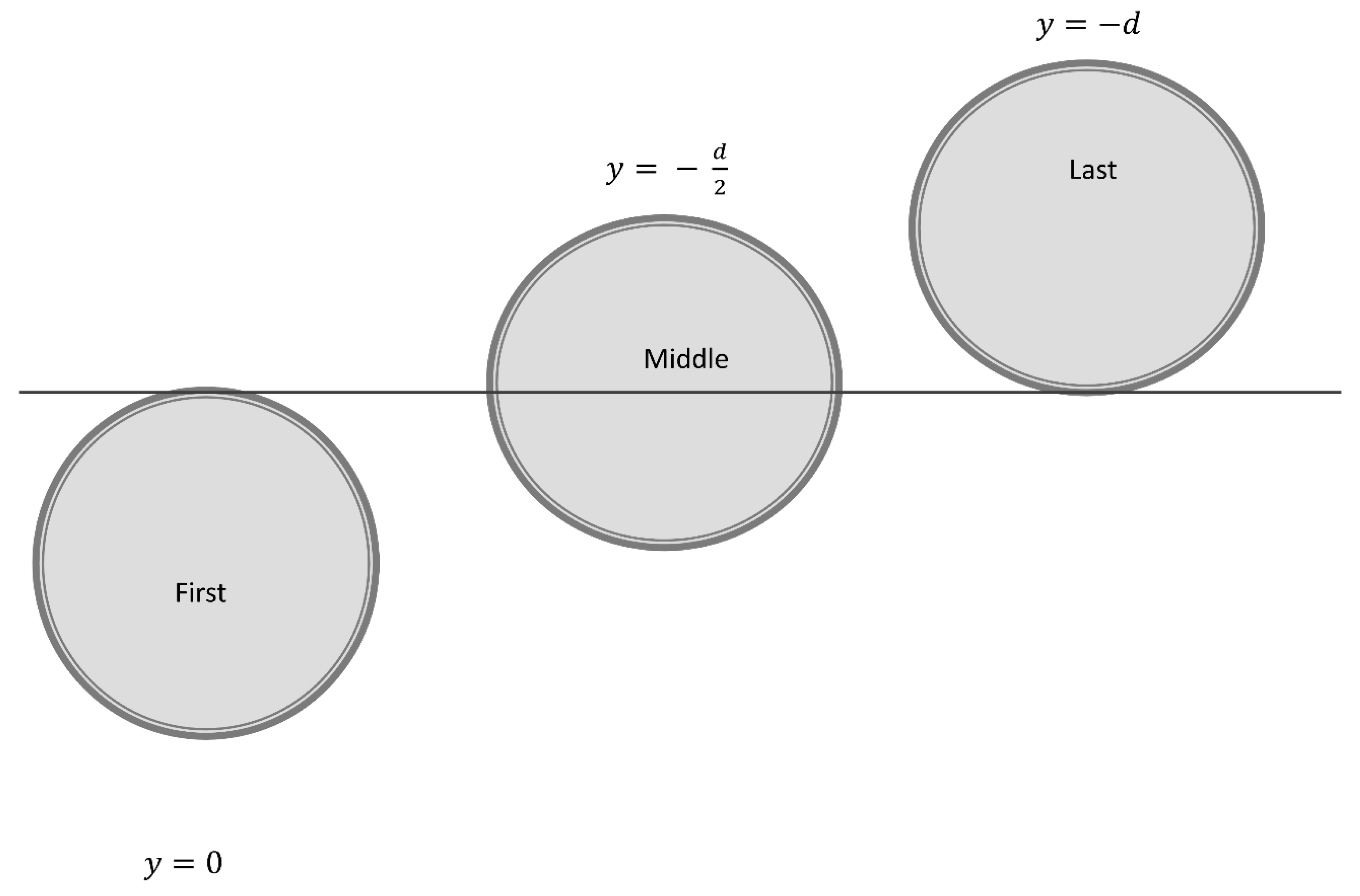
Section 1: Center of Pressure at Initial Contact (First Ball)
At the initial contact point (first ball) where the immersion depth , indicates that the body is touching the water surface without any displacement. By substitution of the value of y into equation 11 and further simplification, we obtained the center of pressure () to be , where d is the diameter of the ball.
Section 2: Center of Pressure at Half-Immersion (Middle Ball)
Similarly, when the body is immersed halfway (second ball), the immersion depth becomes . At this point, the CoP which is a theoretical singularity becomes indeterminate (infinity value, ∞) due to the symmetry of the pressure distribution about the waterline which makes it impossible to define a unique point as the center of pressure ( ). This means that the pressure acting on the body is evenly distributed on either side of the waterline.
Section 3: Center of Pressure at Full Emergence (Last Ball)
In the third scenario, the ball is entirely above the water surface, with a contact point on the surface. The vertical distance (y) is - d, indicating a complete transition from half to full diameter in the upward manner. Calculations for CoP(h) at this point is , identical to the first ball, but with a negative sign indicating the body's position above the water surface.
From X and Y, we can deduce (y + d) (y + 0) and (2y + d) respectively.
3.1. The Complex Center of Pressure (iCoP)
As a novel concept that we derived from in-depth studies and observations, we defined Complex Center of Pressure (iCoP) as a dynamic point that represents the oscillating or varying location of the center of pressure on a circular body. In other words, it’s the dynamic nature of the center of pressure in response to changes in the fluid flow or geometry. Let us consider the novel-derived model for CoP and how it is related to the Complex
Center of Pressure (iCoP).
| = |
- The expression is asymmetric with respect to y, indicating that the relationship between and y is not symmetric about the midpoint, . At this point, CoP equals ∞.
- The presence of both quadratic and linear terms in d and y suggests a complex flow behavior, and nonlinear relationship between the body and the fluid. In addition, this suggests a possible connection to boundary layer theory, where the flow near the surface () is different from the bulk flow.
- The quadratic terms in the equation consolidate the nonlinear pressure distribution found in advanced fluid dynamics, particularly in the study of hydrostatic forces and fluid flow around objects.
| = |
This point represents the oscillating behavior of the immersed body in response to changes in the fluid flow or geometry which in turn generates waves and vortices. In conclusion, the solutions for are complex conjugates:
- =
- =
This implies that the behaviour of depends on the specific value of the diameter, d, with the results being purely imaginary and opposite in sign.
As a new concept in fluid dynamics, Complex or Imaginary Center of Pressure (iCoP) plays a vital role in flow-body systems and how it relates to the formation of phase change, and oscillating phenomenon like waves and vortex when a body is immersed in fluid.
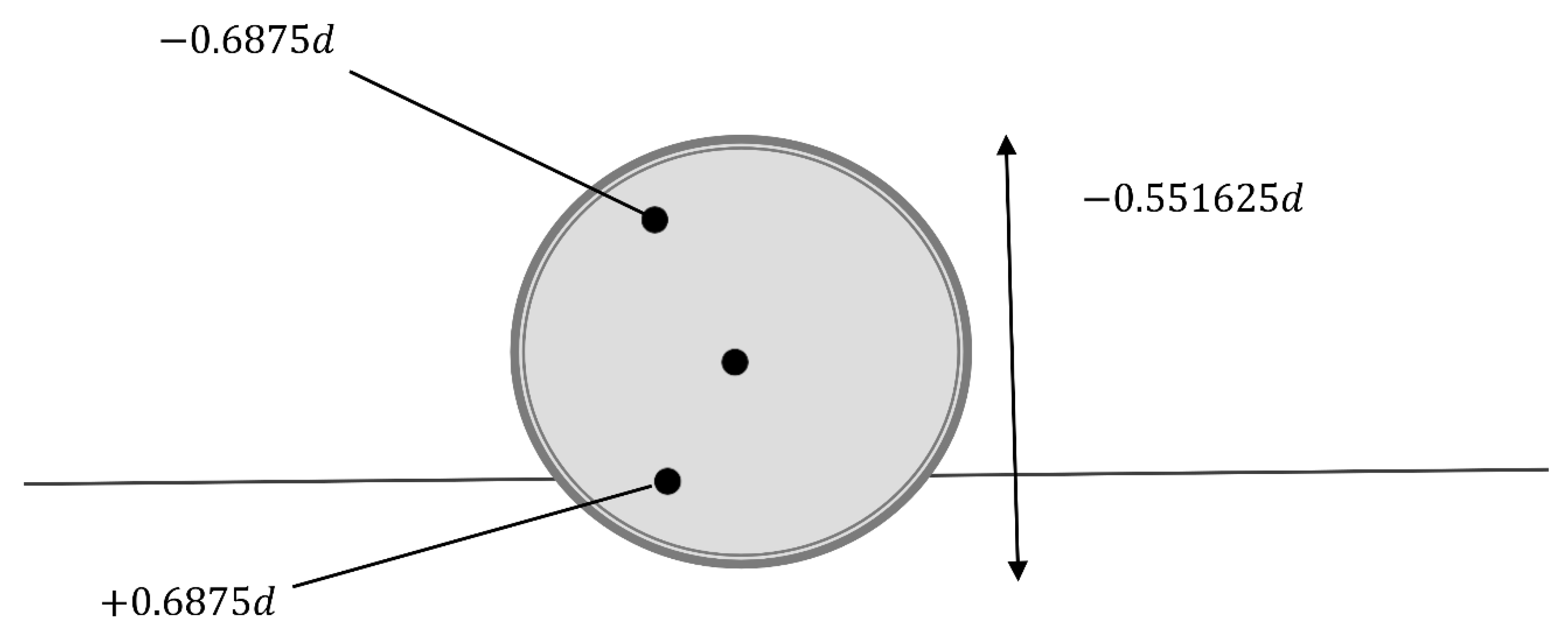
Figure 4.
Graphical Summary of Center of Pressure.
3. Conclusions
Below are the key findings about iCoP derived from work
- Center of Pressure is a function of immersion depth. The ideal center of pressure is and when the body is completely immersed in water and when the body is floating on water respectively. It is practically indeterminate when the body is half immersed in water.
- Complex Center of Pressure (iCoP) is symmetric and has a complex number counterpart which explains the dynamic nature of the body with respect to phase change, boundary layer theory, and oscillations.
- The symbol in the iCoP real part represents points below and above the midpoint of the circular body. These points correspond to where the body displaces water to generate waves and vortices, acting as a critical threshold that determines whether the body will sink or float.
- The real part of the iCoP, which is influenced by the diameter of the immersed body, increases by a factor of and the imaginary component is proportional to the diameter as well as the negative factor of . This signifies a phase shift and oscillatory nature related to the iCoP, where the negative sign indicates a direction or phase difference. The immersion depth of the circular body at this point is given by the equation with the factor of indicating partial immersion. (see the middle ball diagram in Figure 3)
- iCoP is a fixed point on an immersed circular body that is relatively close to the middle of the body and since its proportional to the diameter of the body, it increases for higher diameters. Notably, for iCoP to take effect and exhibit its oscillating nature, the body must be exposed to two media (air and water).
- Understanding the iCoP location of immersed bodies can help determine how a vessel will respond to waves, currents, and other environmental factors, influencing design choices to enhance stability and safety.
- It can help in designing structures that require more stability and less prone to unwanted oscillations which will be applicable in the design of wave energy converters, where understanding how structures interact with waves can optimize energy extraction.
- The research can provide insights into how waves interact with partially immersed bodies, which is essential in studying wave dynamics, and oscillation control.
References
- Rajput, R. K. (1998). A textbook of fluid mechanics and hydraulic machines (1st ed., pp. 98-101). S. Chand & Company Ltd.
- Smith, A. C., Roberts, J. R., Kong, P. W., & Forrester, S. E. (2017). Comparison of centre of gravity and centre of pressure patterns in the golf swing. European Journal of Sport Science, 17(2), 168-178. [CrossRef]
- Zemlyak, V., Pogorelova, A., & Kozin, V. (2022). Motion of a submerged body in a near-surface water environment. International Journal of Naval Architecture and Ocean Engineering, 14, 100433. [CrossRef]
- Maleki, S., & Fiorotto, V. (2022). Immersed body motion: Near-bottom added mass effects. Journal of Fluid Mechanics, 939, A18. [CrossRef]
- Chen, Z. (2012). Product and quotient rules from logarithmic differentiation. Teaching Mathematics and Its Applications: An International Journal of the IMA, 31(2), 118–120. [CrossRef]
- Podryabinkin, E., Ahmed, R., Tarasevich, V., & May, R. (2014). Evaluation of pressure change while steady-state tripping. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering. Volume 5: Materials Technology; Petroleum Technology (V005T11A011). San Francisco, California, USA. ASME. [CrossRef]
- Jasim, N. A., Shamkhi, M. S., & Stojanovic, B. (2020). The design of the center of pressure apparatus with demonstration. Cogent Engineering, 7(1). [CrossRef]
- Nor Arzemi, N. S., & Sivasubramaniam, P. (2010). Long division and the double division method. Procedia - Social and Behavioral Sciences, 8, 85-92. [CrossRef]
- Molland, A. F. (Ed.). (2008). Chapter 3: Flotation and stability. In The maritime engineering reference book (pp. 75-115). Butterworth-Heinemann. [CrossRef]
- López, J., Robles, I., & Martínez-Planell, R. (2015). Students’ understanding of quadratic equations. International Journal of Mathematical Education in Science and Technology, 47(4), 552–572. [CrossRef]
- Kim, W., & Choi, H. (2019). Immersed boundary methods for fluid-structure interaction: A review. International Journal of Heat and Fluid Flow, 75, 301-309. [CrossRef]
- Nicolaou, L., Jung, S. Y., & Zaki, T. A. (2015). A robust direct-forcing immersed boundary method with enhanced stability for moving body problems in curvilinear coordinates. Computers & Fluids, 119, 101-114. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



