
Submitted:
03 September 2024
Posted:
04 September 2024
You are already at the latest version
Abstract
The increasing frequency and intensity of wildfires necessitate innovative solutions to enhance firefighting capabilities. This review provides a comprehensive evaluation of vehicles specifically designed for direct forest fire suppression, focusing on their speed of fire response, and encompasses both ground and aerial units. The study explores the functionality and speed capacity of various fire suppression vehicles, including fire trucks, firefighting aircrafts and helicopters, robotic firefighting vehicles and uncrewed aerial vehicles (UAVs). Key features such as mobility, water capacity, and advanced technologies including Artificial Intelligence (AI)-driven navigation and remote sensing capabilities are evaluated. The review also addresses the operational challenges these vehicles face in wildland environments. Additionally, it identifies emerging trends and innovations in fire suppression vehicle technology, offering insights into future developments that aim to enhance the effectiveness and safety of firefighting operations in forest fires. This overview aims to serve as a valuable resource for researchers, fire departments, and emergency response planners focused on advancing fire suppression strategies in forest.
Keywords:
Wildfire
; Firefighting technology
; Firefighting vehicles
1. Introduction
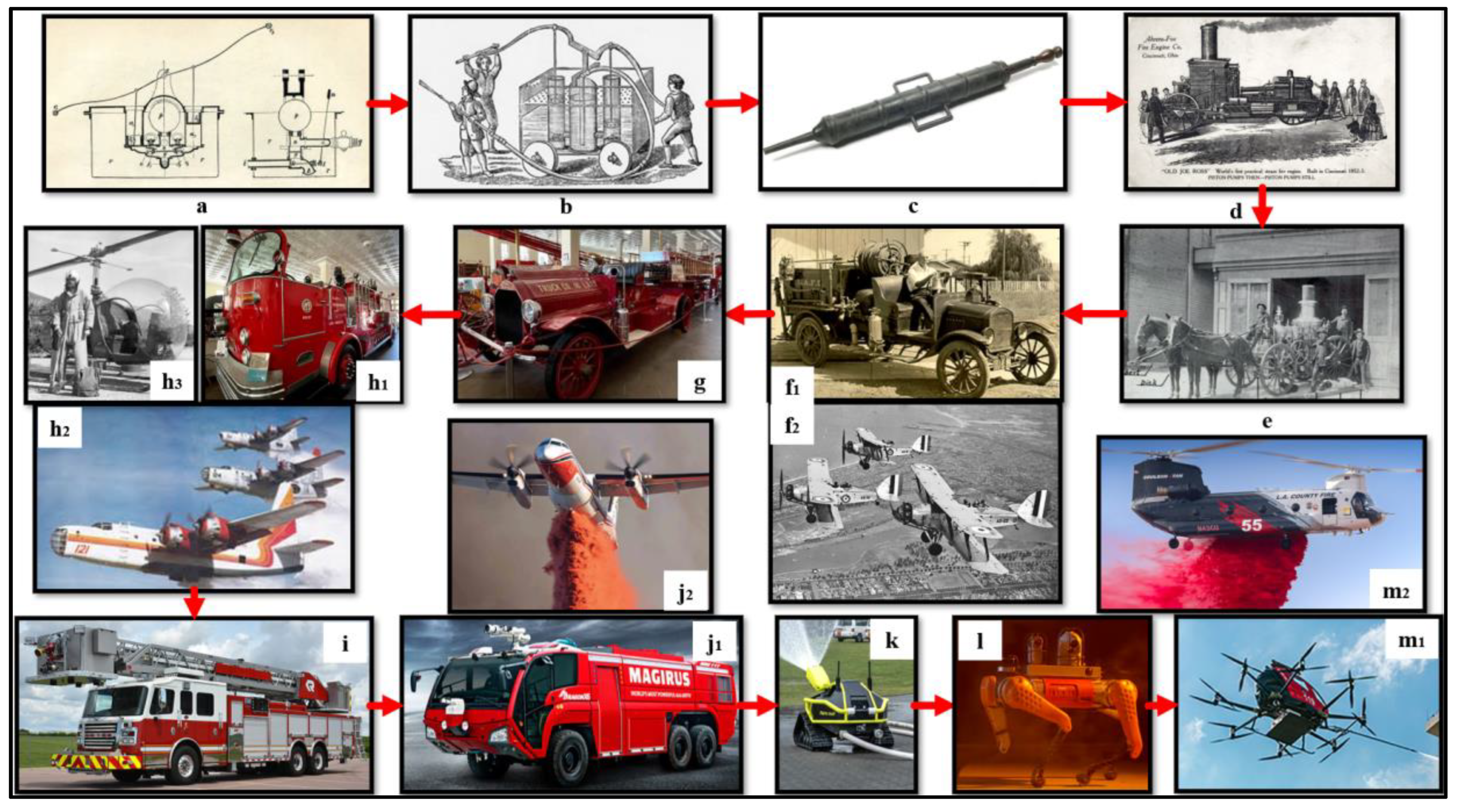
Firefighting has been a major societal challenge for centuries. The technology of firefighting has evolved drastically in history as shown in Figure 1. The first recorded invention for firefighting is the manual pump design shown in Figure 1-a designed by Ctesibius of Alexandria in ancient Egypt about 2000 BC. After about 1800 years, the concept of Ctesibius was improved and produced by Hero of Alexandria in ancient Rome as shown in Figure 1-b [1]. This vehicle was completely human driven like a wheelbarrow which was commonly used at that time. People used auxiliary tools like buckets and shovels to pour water and throw soil on the fire until the great fire of London in 1666. It was the first time that a syringe-like tool with a nozzle as shown in Figure 1-c was used for firefighting [2]. After the first patented invention of steam pump for mine drainage by Jerónimo de Ayanz y Beaumont in 1606, the invention was developed to be used in firefighting until 1852 when the first steam engine was introduced for fire extinguishing in Cincinnati as shown in Figure 1-d [3]. Afterwards, the steam engine for firefighting was carried by horses as shown in Figure 1-e, when private firefighting services were first used [4].
The combustion engine and airplanes were introduced to firefighting operations by the end of 19th. century as shown in Figure 1-f1-f2 [4]. Back then, airplanes were used to carry 25 gallons of water for extinguishing fires in 1929 [5]. When the Ford company flourished rapidly and standardized mass production of automobiles and trucks, many of the fire trucks with ladders were developed as shown Figure 1-g [5]. By 1950, there were three types of firefighting vehicles along with helicopters as shown in Figure 1-h3. As technology advanced, the capacity of vehicles improved in terms of transported load and pumping systems as shown in Figure 1-i [5]. Robotics was first studied to involve in firefighting operations as modern technology by the beginning of the 21st. century which increased the diversity of the vehicles used for firefighting operations as an assistive vehicle [6].
The first notable use of UAVs in a firefighting operation occurred during the Esperanza Fire in Southern California in 2006 [7]. By the 2010s, UAVs were being adopted in various firefighting scenarios around the world, as the conventional technologies such as truck, airplane and helicopter proceed to high levels of capacity as shown in Figure 1-j1-j2-m2. The first commercially available robotic firefighter was the Colossus, developed by Shark Robotics in 2017 [8]. UAVs have been used for a range of tasks, including assessing fire behavior, mapping, and delivering fire retardants since 2020 [9]. Recently, quadruped robots have been used for indoor firefighting operations [10].
Figure 1.
The chronological evolution of firefighting. a) The design of Ctesibius of Alexandria in ancient Egypt, b) The design of Hero of Alexandria in ancient Rome, c) The syringe-like tool with a nozzle used for the great fire in London, d) The first steam engine for fire extinguishing in Cincinnati, e) The steam engine for firefighting carried by horses in Cincinnati, f1) The first fire truck in Los Angeles. f2) The first fire fighting airplane in Los Angeles, g) The first fire trucks with ladders in Los Angeles. h1) Developed fire truck in Los Angeles, h2) Developed airplane in Los Angeles, h3) The first fire helicopter in Los Angeles, i) The modern fire truck in Los Angeles, j1) Modern fire truck for airports made by Magirus, j2) Modern fire airplane in California, k) Robotic firefighter made by Magirus, l) Research and Rescue quadruped made by China, m1) Firefighting drone made by China, m2) Fire helicopter in California.
Figure 1.
The chronological evolution of firefighting. a) The design of Ctesibius of Alexandria in ancient Egypt, b) The design of Hero of Alexandria in ancient Rome, c) The syringe-like tool with a nozzle used for the great fire in London, d) The first steam engine for fire extinguishing in Cincinnati, e) The steam engine for firefighting carried by horses in Cincinnati, f1) The first fire truck in Los Angeles. f2) The first fire fighting airplane in Los Angeles, g) The first fire trucks with ladders in Los Angeles. h1) Developed fire truck in Los Angeles, h2) Developed airplane in Los Angeles, h3) The first fire helicopter in Los Angeles, i) The modern fire truck in Los Angeles, j1) Modern fire truck for airports made by Magirus, j2) Modern fire airplane in California, k) Robotic firefighter made by Magirus, l) Research and Rescue quadruped made by China, m1) Firefighting drone made by China, m2) Fire helicopter in California.
However, the technology has not yet fully realized its potential, as fire incidents continue to increase globally, causing harmful effects on nature and biodiversity, and significantly impacting global warming, people, and the economy. In 2021, wildfires affected 22 out of the 27 European countries, leading to the burning of over 5,500 km² of land across Europe. The fires cost €54 billion between 2000 and 2017 [11].
Firefighting involves several phases, starting with fire detection [12], which is a continuous process that includes identifying wildfires through lookout towers [13], patrols using aircrafts [14] or land vehicles [15], satellite imagery [16], and reports from the public. In cases of early detection, the initial attack phase quickly deploys resources to the wildfire to attempt rapid containment before it grows larger, using ground crews, water-dropping aircraft, and fire retardants. If the fire is not suppressed in the early phases, an extended attack phase is initiated, involving the mobilization of additional resources, including more personnel, equipment, and aircraft. Containment actions are then implemented, such as establishing control lines around the wildfire to prevent its spread, often involving bulldozers, hand crews creating firebreaks, and controlled burns. Suppression phase directly attacks the fire along its edges and within its perimeter using water, foam, and fire retardants to extinguish flames and cool hotspots. This is followed by a mop-up phase to extinguish any remaining hotspots within the fire perimeter, ensuring the fire does not rekindle by checking for and extinguishing smoldering materials. Finally, the patrolling phase involves monitoring the fire area for any signs of re-ignition or flare-ups, which often continues for several days or weeks after the main fire is extinguished.
Satellite based systems are attractive for fire monitoring as they operate autonomously, provide global coverage, and are highly cost-effective. Several satellite-based systems are specifically designed to capture images for wildfire detection. Both low earth orbit and geostationary satellites are utilized for wildfire detection, each offering distinct advantages in spatial and temporal resolutions [17]. Low earth orbit satellites, such as Advanced Very High-Resolution Radiometer (AVHRR) [18], Moderate Resolution Imaging Spectro-radiometer (MODIS), and Visible Infrared Imaging Radiometer Suite (VIIRS), provide excellent spatial resolution down to 375 meters but have a lower temporal resolution of 6 hours. MODIS data can be accessed publicly through the Web Fire Mapper service [19]. However, these systems have some shortcomings, including limited performance in detecting small fires, identifying fires at an early stage, operating through clouds, and providing sufficiently accurate real-time data to support firefighting efforts. In contrast, geostationary satellites like GOES and MSG-SEVIR offer images every 15 minutes but with a reduced spatial resolution of 5 kilometers [20].
UAV-based fire detection is a recent trend topic of research. In wildfires, UAVs provide critical data about the fire if they have connection to Global Navigation Satellite Systems (GNSS) [21]. However, the practical solutions on pose estimation of UAVs without a connection to GNSS are rare [22]. As for some recent advancement of firefighting technology, the multi-objective optimization model using the Deep Q-Network (DQN) algorithm effectively adjusts UAV formations for monitoring and extinguishing wildfires. The DQN algorithm, trained through numerous simulations, demonstrated faster and more accurate performance compared to genetic algorithms but requires real-world validation [23]. A data-driven spatiotemporal model for predicting smoke plume dynamics outperformed the Gaussian puff model, with future work focusing on refining the model using multiple UAVs and applying it for tracking wildfire smoke plumes [24]. A super-pixel-based graph convolutional network was developed for UAV-intervened wildfire segmentation, using the simple linear iterative clustering algorithm for efficient segmentation and precise edge detection.
Machine vision is a fundamental tool for wildfire monitoring, enabling the use of AI and internet of things (IoT) communication to detect and track objects during intrusions and fire incidents, with plans to enhance its performance across various settings [25]. The Phoenix algorithm, integrated into a modified Traveling Salesman Problem algorithm, improves wildfire monitoring with a single UAV by enhancing energy efficiency and coverage [26]. Given the difficulty of accessing wildfires by ground vehicles in mountainous terrain, small UAVs present a promising solution. An effective UAV path-planning algorithm that utilizes real-time infrared images can monitor fires more efficiently. The algorithm's effectiveness can be demonstrated using the EMBYR model to simulate wildfire propagation. Additionally, the cooperative control of multiple low-altitude, short-endurance UAVs, can improve the information update rate during fire monitoring [27].
Robotic technologies have been reducing risks to human life [28]. Robots are used to spray retardant to burning areas for protection of firefighters from being exposed to fire. Four different robot groups were mentioned in the literature of firefighting [29]. The classification comprises detection, fire suppression, smoke extraction, and explosive disposal. Detection robots are equipped with advanced sensors and thermal imaging cameras, enabling them to locate fire sources and assess environmental conditions, even in smoke-filled or obscured areas. Fire suppression robots are designed to directly combat flames by deploying water, foam, or other fire-retardant materials with precision, reducing the spread of fire and minimizing damage. Smoke extraction robots help in clearing smoke from confined spaces, improving visibility and air quality, which is essential for both human firefighters and potential victims trapped in the area. Explosive disposal robots are crucial in situations where hazardous materials or unexploded ordnance are present, safely neutralizing threats and preventing secondary explosions.
There has been significant progress in firefighting technologies during the past years. However, there is still a gap in the literature about firefighting vehicles and their performance on rapid intervention to wildfire. This is essential information when aiming for the more advanced use of autonomous technologies in more efficient firefighting. This paper focuses on different types of firefighting vehicles and evaluates their fire response speed and capacity. A realistic approach is proposed for evaluation of fire extinguishing speed of each type of firefighting system. The remainder of this paper is structured as shown in Figure 2, beginning with advancement of manned ground and airborne vehicles, and then moving to future systems, including UAVs, robotics, and autonomous systems.
2. Ground Vehicles for Advanced Fire Suppression
Firefighting trucks, the backbone of ground-based fire suppression efforts, have seen significant technological advancements in recent years, enhancing their capability and efficiency. Modern fire trucks are equipped with a tank made of Carbon Fiber Reinforced Polymer (CFRP), reducing its weight by 47.9% and increasing its capacity by 13.3% [30]. Innovations such as high-capacity pumps [31], advanced nozzle designs [32], and compressed air foam systems (CAFS) ensure optimal water and foam application [33]. Furthermore, autonomous cars for firefighting were developed, allowing for safer operations in hazardous environments [34].
Amphibious firefighting vehicles are specialized apparatus designed to combat fires in both terrestrial and aquatic environments. These vehicles can transition seamlessly between land and water, making them highly versatile and effective in diverse firefighting scenarios. They are capable of operating on land and water, allowing for access to difficult-to-reach areas, such as remote lakes, rivers, or wetlands [35].
NAFFCO ARFF FALCON series are equipped with powerful pumps and onboard water tanks to extinguish fires on the airport. They are built to withstand harsh environments and heavy-duty use, often featuring reinforced hulls and durable construction materials. They have enhanced mobility to navigate challenging terrains and obstacles, making them invaluable for firefighting in flood-prone or rugged areas [36].
The propjet technique, powered by compressed gasses, is an advanced spraying method used in firefighting vehicles of airports. It utilizes the compressibility of air to produce supersonic speeds through the rapid expansion of compressed air. Key features include a wide and adjustable power range (0.5 to 50,000 KW), variable outlet speeds (from subsonic to high Mach numbers), and a high power-to-weight ratio. This technique has been adapted for firefighting, creating a "compressed gas + extinguishants" system. This system converts extinguishants into high-speed microdots, significantly enhancing their firefighting capabilities. For instance, at 0.8 MPa pressure, compressed air can achieve an outlet speed of 680 m/s, compared to 40 m/s for water. Using a specially designed energy conversion device, water streams driven by compressed air can reach speeds of 200 m/s with droplet diameters of 60-100 micrometers, allowing the mist to penetrate flames effectively [37].
A turbojet fire truck, utilizing a WP-5 type aeroengine, can produce a gas jet with speeds of 400-550 m/s and power up to 4000KW. When this gas jet is mixed with water or extinguishing foam streams (at 60-80 m/s) in an energy conversion device, the resulting "gas-fine mist" or "gas-extinguishing foam" stream can reach speeds of 200-250 m/s. This high-speed mist or foam penetrates flames effectively, covering up to 300m² and extinguishing fires rapidly—an 80m² oil fire can be put out in 10 seconds, and a 520m² fire in 80 seconds. Turbojet fire trucks are highly effective in extinguishing large fires in airports, oil fields, warehouses, and high-rise buildings, and they also excel in blowing away and cooling fire smoke [38].
A fine mist fire truck utilizes a specially designed expanding device that converts 1.0-1.2 MPa compressed gas into a water stream, creating a fine mist with droplet sizes less than 200 micrometers and an outlet speed exceeding 100 m/s, reaching distances up to 25 meters. This addresses two limitations of conventional water mist systems: limited distance and poor flame penetration. The fine mist effectively absorbs toxic gasses, cools the fire area, and disperses smoke, making it highly suitable for fires in residential buildings, hotels, hospitals, and other places where human rescue is critical [39].
An aerosol fire truck sprays superfine extinguishing powder to create an extinguishing aerosol with excellent flowability and dispersity. This aerosol can rapidly fill indoor spaces, achieving a "fully flooding" effect to extinguish fires quickly and efficiently. It is particularly effective for challenging fires in tunnels, ancient constructions, and high-rise buildings. Additionally, when the aerosol concentration exceeds a certain threshold, it exhibits anti-detonation properties, reducing or preventing the deflagration and detonation of flammable gasses. This makes aerosol fire trucks especially useful for fires that pose a risk of explosions [40].
The design of a light wildfire truck addresses the logistical challenges of extinguishing outdoor fires. The primary issue with midweight fire trucks, which are the most used, is their limited off-road capability. This limitation prevents firefighters from being transported directly to the fire site, resulting in prolonged pedestrian approaches and slow movement on rough roads. Smaller vehicles, such as the Dodge RAM, can carry up to 6 people and 1,000 liters of water. While medium-weight fire engines average 60 km/h on asphalt but drop to 20 km/h on rough roads and require pedestrian approaches off-road, light trucks can reach 70 km/h on asphalt, 40 km/h on rough roads, and 10 km/h off-road. A practical calculation showed that for a fire 15 km from the fire department, involving 10 km of asphalt, 4 km of rough road, and 1 km of terrain, these speed differences significantly improve response time [41]. These technological enhancements given above in firefighting trucks significantly bolster the overall efficiency, safety, and effectiveness of fire suppression efforts, ensuring a more robust response to fire emergencies. However, their speed of arrival cannot be as fast as the speed of flying vehicles especially for wildfires, which usually occur in areas with difficult access. Table 1 shows a variety of information about currently used firefighting trucks as an example.
3. Aerial Vehicles for Fire Fighting
Flying vehicles are highly relevant for firefighting wildfires because they can address logistical challenges more effectively than the ground-based vehicles. They can cover shorter distances between locations are avoid obstacles like hills, cliffs, or rough roads. In the event of a wildfire, transportation is crucial because the sooner you can intervene, the faster you can extinguish the fire and protect the environment.
Helicopters are essential in firefighting for various tasks, including transporting personnel and cargo, applying water or retardant, conducting fire reconnaissance, aerial ignition, search and rescue, and law enforcement missions. Type 1 helicopters, the largest and most expensive, can carry 700 gallons of water or retardant and are highly accurate in their drops, coordinating closely with ground crews. They refill at dip sites like lakes and reservoirs. Some Type 1 helicopters can also transport up to 15 personnel, while others focus on water or retardant drops and moving supplies. Type 2 helicopters, effective for initial attacks, can transport up to nine firefighters and deliver up to 300 gallons of water. Type 3 helicopters, though smaller, have a higher cruise speed and can carry four to five firefighters with a 180-gallon bucket, making them quick responders to initial attack wildfires [42]. However, helicopters are not as agile as UAVs. Although helicopters are currently the best options in conventional technology, UAVs could replace them soon with innovative designs that offer improved speed and agility [43,44].
Airtankers are crucial in wildfire suppression, offering different capacities and capabilities. Very Large Airtankers (VLATs) like the DC-10 can deliver up to 9,400 gallons of fire retardant but are less maneuverable. Large Airtankers, also called "Next Gen," carry between 2,000 to 4,000 gallons and offer better maneuverability. Single Engine Airtankers (SEATs) deliver up to 800 gallons and are ideal for lighter fuels. Water Scoopers are amphibious aircraft that can quickly scoop and drop up to 1,600 gallons of water. Military Airborne Firefighting Systems (MAFFS) convert C-130 aircraft into large airtankers using portable retardant delivery systems. The MAFFS program is a collaboration between the U.S. Forest Service and the Department of Defense [45].
However, aircrafts have many limitations in extinguishing fires. Aircraft must maintain certain speeds and distances from the fire, making precise water discharge difficult. Additionally, they require landing points for refueling, adding operational challenges. Despite these limitations, the capital and operational costs of firefighting aircraft are extremely high, up to €35 million per year, with acquisition costs starting at €3 million. Operating costs, including hiring pilots and maintaining aircraft, can exceed €4,000 per hour. Budget constraints often hinder administrations from acquiring and operating these firefighting resources [46].
Current practices for fighting fires, including human piloted airplanes, helicopters, ground fire engines, and ground personnel, are limited by several factors. Most importantly, these methods put human lives at risk, are inefficient at night, and suffer from limited mobility and inefficient water release methods. When maneuverability, the consumed fuel, and travel time of airtankers are considered, a swarm of innovative adaptive UAVs can be more affordable and quicker to detect and extinguish the wildfires despite their low capacity of payloads before the fire spreads.
4. Uncrewed Aerial Vehicles (UAVs)
UAVs have emerged as pivotal in enhancing the efficiency and safety of firefighting operations [47]. UAVs, commonly known as drones, offer unparalleled capabilities in real-time surveillance [48], fire mapping [49], sensing, and monitoring, allowing firefighters to assess [50] situations rapidly and accurately without putting human lives at risk. The recent advancements of UAV for firefighting are addressed in this section. Although an airtanker can carry 35600 liters of water at once, it takes several hours to prepare and reach the burning area. However, if a UAV can carry 100 liters for 30 minutes at a time, a swarm of 100 UAVs could collectively deliver 10000 liters [51]. Their travel speed can change about 40 km/h. The traveled distance between fire station and wildfire would be shorter than the distance traveled by any other ground-based vehicle due to air transportation. Thus, UAVs can intervene the fire quicker and more precisely from different directions. The advantages of UAVs include risk-free operation for human pilots, agility, zero-emission, low cost compared to airtankers, helicopters, and autonomy which is critical for the operation at night.
Recent advancements on UAVs are promising. A reinforcement learning (RL)-based platform for fire warning and suppression has been proposed, comprising an energy-harvesting (EH)-assisted small UAV(SUAV) for fire detection and multiple ground-based firefighting UAVs (FUAVs) for fire suppression. This platform not only detects fires but also notifies FUAVs with accurate position data to enhance fire extinguishing efforts. The goal is to inform as many FUAVs as possible. A deep Q-learning (DQL)-based trajectory design helps optimize the SUAV's route to maximize FUAV notification within a limited time. This DQL-based strategy outperforms traditional Q-learning in mission success by increasing the number of FUAVs reaching the fire zone [52].
The fire extinguishing balls can be used to create fire breaks by the help of UAVs dropping them to prevent their spread and protect vital areas. The fire-extinguishing UAVs were proposed to tackle wildfires at their initial stages before ground teams arrive. These UAVs can deploy fire-extinguishing balls accurately, with 100% accuracy within a 10-meter range and 80% accuracy from heights of 20 meters or less. Field tests showed that continuous deployment of these balls was effective for constructing firebreaks and protecting critical facilities, achieving high performance in all tested indicators. The use of multiple UAVs could significantly enhance wildfire response and prevention. However, issues like the tendency of fire-extinguishing balls to roll upon deployment need to be addressed, potentially by redesigning them to split upon impact for better stability and effectiveness [53].
The controlled experiments tested the efficiency of fire-extinguishing balls for combating wildfires, as part of a research project focused on designing a UAV system to deploy these balls using remote sensing. The experiments indicated that fire-extinguishing balls could be effective if deployed optimally by a swarm of UAVs. Future research could focus on developing the swarm platforms, upgrading the dropping mechanisms, and creating wind trajectory models for various vegetation types. Initial tests showed that 0.5 kg balls were ineffective for fires involving solid or liquid burning materials, but larger balls should be used to improve the efficiency. However, these smaller balls successfully extinguished a short grass fire within a 1-meter diameter circle, suggesting potential for further development of UAV-assisted wildfire-fighting systems [54].
A fire extinguishing-ball throwing UAV was developed and tested for urban fires. The presented solution achieved high precision in throwing maneuvers, with an average minimum distance of 0.17 meters between the ball and the target in simulations, and successful hits on a 19x19 mm target using a real UAV. The system includes a modular architecture with a mission planner overseeing various tasks, and a speed controller that translates desired velocities into position references. This design is adaptable for future applications, such as UAVs in urban firefighting [55].
The early fire response and extinguishment was studied by developing a mathematical model that considers the mass of extinguishing substances and UAVs' battery consumption. The model aimed to reduce overall costs by optimizing sensor placement to detect fires early and efficiently. Key factors included UAVs' limited battery life and charging station availability. A pragmatic greedy heuristic approach was proposed, with the first phase determining optimal routes for fire extinguishing and the second phase refining the solution using relocation and exchange operators. The model ensures vehicle capacity and continuous battery supply. For example, using 12 UAVs results in a 60% reduction, whereas deploying 4 UAVs achieves a 35% reduction. The corresponding costs for these extinguishing operations are $28,539.20 and $25,592.80, respectively. Results showed the heuristic algorithm's efficiency in finding optimal solutions, supported by computational analysis based on Clark and Wright principles [56].
A novel approach has been proposed for autonomous firefighting missions using UAVs, which includes a local planner module that guides the UAV along an obstacle-free path to the target zone. Once the target point is detected, the UAV plans an optimal trajectory for a precision ballistic launch of an extinguishing ball, considering its kinematics. The trajectory is designed to minimize traversal time and final state error while adhering to UAV dynamic limits. The system's performance was assessed through simulations and real-world tests involving randomly positioned obstacles and target locations. Results indicated that the UAV effectively navigated complex environments, accurately targeting and deploying the extinguishing ball, thus demonstrating the feasibility and effectiveness of the proposed approach in real firefighting scenarios [57].
The reinforcement learning algorithms were studied to control a swarm of UAVs for combating wildfires. DQN, Rainbow DQN, and FQF algorithms were compared and using simulations and realistic wildfire scenarios in AirSim (Microsoft, Redmond, Washington, USA), with swarms of two and four UAVs. Consequently, DQN and FQF outperformed Rainbow DQN, with DQN and FQF achieving similar results, although FQF occasionally struggled in some scenarios. The research highlights the importance of testing with larger swarm sizes to assess efficiency, convergence, and speed [58].
The multi-swarm cooperative information-driven search and divide and conquer mitigation control (MSCIDC) approach for rapid detection and mitigation of wildfires was introduced. This method employs a swarm of UAVs working together to efficiently locate and extinguish fire areas, thereby minimizing the loss of biodiversity, nutrients, and soil moisture. MSCIDC uses a two-stage search process: cooperative information-driven exploration and exploitation, based on thermal sensor data, to quickly and accurately detect fires. The approach leverages global regulative repulsion and merging among swarms to reduce detection and mitigation time, and local attraction among swarm members to expedite reaching fire locations. The divide-and-conquer strategy ensures effective allocation of fire sectors for extinguishing. Simulation results in a pine forest environment demonstrated that MSCIDC significantly outperformed existing multi-UAV methods, reducing the average burnt area by 65% and mission time by 60%, ensuring faster and more successful missions [59].
UAVs are recently researched for direct firefighting operations. Most of them are not feasible enough for the real application of direct firefighting in forest. The reasons for infeasibility are unconsidered conditions such as instability, hitting the target under windy weather or the battery life. Although UAVs dropping fire-extinguishing balls seem to be feasible for grass fires, they are ineffective for fires on trees in forest. However, UAVs are very handy, when it comes to monitoring and detection in wildfires. As mentioned above, there is a need for a supportive ground vehicle which has communication with the monitoring and detection system.
A swarm of UAVs for both detection and extinguishing of fire would have a great effect on speed of firefighting operations. However, the swarm ground vehicles must have the ability to fly for rapid transportation of fire retardant for fire extinguishing operation. If the transportation of fire retardant is done by road, the environmental protection benefits of early fire detection will be reduced. Moreover, these ground vehicles would provide longer battery consumption duration due to the lower necessity of stabilization compared to fire extinguishing operations by hovering on the sky.
5. Robotics and Autonomous Systems
Firefighting robots are advanced technological tools designed to enhance safety and efficiency in firefighting operations by navigating hazardous environments, suppressing fires, and conducting search and rescue missions. A fire-fighting robot designed for intelligent buildings was constructed with an aluminum cylindrical frame measuring 40 cm in diameter and 80 cm in height. The robot integrated six systems: structure, obstacle avoidance and driving, software development, fire detection, remote supervision, and others. The fire detection system utilizes three LM393 3 pin IR flame detection, smoke, temperature, machine vision, ultrasonic and microwave doppler sensors and employs an adaptive fusion method, refined through computer simulation, for accurate fire detection. The robot is programmed to detect and combat fires using sensor-based methods. Upon confirming a fire, the robot locates the source and extinguishes it, demonstrating the effectiveness of the implemented fire detection system [60].
The SnakeFighter concept focuses on using water hydraulic snake robots for fire intervention, leveraging water for joint actuation, fire extinguishing, and cooling. The key design challenges and details the development of a demonstrator robot that showcases this concept [61]. A biologically inspired gait pattern was successfully implemented and tested. However, challenges remain, including the need for a more compact and efficient hydraulic system and advanced control strategies to make the fire-fighting snake robot fully operational [62].
A real-time monitoring system for home automation integrates various components, including a fire-fighting robot, security devices, television, remote control systems, and communication modules like GSM modems and wireless RF controllers. The fire-fighting robot is controlled by an industrial personal computer (IPC) and programmed using Visual Basic. It receives security data through a wireless RS232 interface and can be managed via a general user interface [61]. Some robots employ IR and ultrasonic sensors for obstacle avoidance and use LM393 3 pin IR flame detection, smoke, temperature, machine vision, ultrasonic and microwave doppler sensors to detect and extinguish fires. Future improvements include developing a new obstacle detection module with an enhanced fusion algorithm and incorporating a laser range finder for more precise environmental mapping [63].
There are some recent advancements in robot-assisted firefighting systems, focusing on technologies that enhance risky interventions, localization, navigation, early rescue, and environmental surveillance. It contrasts the mentioned conventional firefighting robots and traditional methods with emerging Cyber Physical Systems (CPSs), which integrate computational and physical elements for improved autonomy and resilience. Integrating new technologies and systems can significantly improve real-time data utilization, supporting better decision-making and increasing the effectiveness of fire protection and firefighting operations [64].
A firefighting robot named CeaseFire was developed to assist firefighters by monitoring temperature and air quality at fire sites and transmitting data to a remote operator. The robot featured an onboard camera for visual assessment and optional audio capabilities for communication with victims. Equipped with a large water tank and CO2-based fire extinguishing system, CeaseFire could handle various types of fires, including electrical ones, and included a mist spray mechanism for self-protection. Initial tests with artificial fires had shown that the robot performed effectively and was expected to provide valuable support in real firefighting scenarios. Future improvements will focus on enhancing temperature shielding, using more resistant materials, and incorporating lighter batteries and heat-resistant components [65].
Firefighting robots are designed to extinguish fires without exposing firefighters to danger. QRob's compact size allows it to access narrow spaces, and it is equipped with an ultrasonic sensor to avoid obstacles and a flame sensor for fire detection. The robot can automatically identify fire locations and extinguish fires remotely from a distance of up to 40 cm. Human operators can monitor QRob using a camera connected to a smartphone or other remote devices [66].
Rainbow 5 is an advanced firefighting robot from Japan designed for complex fire scenarios, including petrochemical fires, aircraft crashes, and oil/fat fires. It features an obstacle removal system to clear debris and a dual-nozzle system: one for high-volume water discharge (5000 liters/min) and one for foam (3000 liters/min). This configuration allows it to effectively manage intense fires and hazardous environments, including those with explosion risks [67].
The Thermite RS1 is a highly capable and rugged firefighting robot designed for challenging environments. It features a 24 hp diesel engine and can output up to 1,250 gallons per minute (gpm) at 200 psi. Controlled remotely via a bellypack controller, it provides real-time high-definition and infrared video, allowing precise operation in hazardous conditions. The RS1 is built with durable construction-grade components, enabling it to push vehicles, climb stairs, and handle extreme elements. It offers a stand-off range of 300-500 meters, has cooling sprayers for tracks and vehicles, and can operate for up to 20 hours on a single tank. Optional attachments include a foam nozzle and scene lighting for enhanced functionality [68].
The LUF 60 firefighting robot is designed for challenging fire scenarios where traditional methods are impractical. It features a powerful 140 HP diesel engine and a crawler chassis that ensures stability, precision, and the ability to navigate obstacles and steep inclines. The robot can deliver up to 2,400 liters of water per minute as an atomized water jet with a reach of over 60 meters. It can also switch to foam mode, with a foam throwing distance of approximately 35 meters, for additional fire-fighting capabilities [69].
The LUF 120 is designed for combating large fires, with a water output of up to 18,000 liters per minute from its main monitor. It is powered by a V6 450 hp diesel engine and features two hydraulic water pumps for long-distance water projection. The robot includes a monitor that can rotate 350° and adjust vertically from +20° to +80°, allowing it to operate effectively in challenging environments like refinery fires. The crawler chassis ensures precise maneuverability and stability, and the robot can function in extreme heat and low oxygen conditions without endangering human lives [70].
The LUF 300 is designed for tackling large fires with high efficiency and flexibility. It comes in two models: the LUF 300 SG with an extendable extinguishing cannon and the LUF 300 HF with an adjustable monitor nozzle. The LUF 300 HF features a 300 HP diesel engine, delivering water at a distance of up to 110 meters and a rate of 8,000 liters per minute with 6 bar pressure boost. Its monitor is adjustable vertically from -10° to +80° and can rotate 350°, providing flexibility in challenging scenarios like refinery fires. The crawler chassis ensures stable maneuverability and can handle obstacles such as cars. The machine operates effectively in extreme heat and low oxygen environments [71].
The LUF Nano firefighting robot is an innovative and highly maneuverable device designed for challenging terrains. It operates entirely on electricity and features an extinguishing monitor that allows fires to be tackled from a safe distance, which is particularly useful in hazardous situations. Additionally, it can carry equipment to the fire scene, enhancing its utility. Its agility and flexibility make it suitable for complex firefighting scenarios [72].
The Parosha Cheatah GOSAFER is a versatile uncrewed ground vehicle (UGV) suitable for firefighting and various other activities like rescue and exploration. It features a heavy-duty hydraulic-powered robot arm with a water spray for extinguishing fires and is equipped with a range of advanced tools, including day and night video cameras, thermal imaging, a laser rangefinder, an acoustic detection system, and a nuclear detection system. The robust and adaptable GOSAFER can be controlled from a distance, ensuring operator safety [73].
All the systems above are powerful in terms of extinguishing capability and safety. However, they are not fast enough to prevent fire spread. Most of them need to be transported to the incident area and controlled by an operator which causes a limitation of working hours. They are also slow when it comes to refilling the tank.
6. Discussion and Outlook
6.1 Comparison of response speed of different techniques to evaluate the burned area upon the arrival of fire trucks, air-tankers, helicopters, and UAVs. The data of fire spread rate produced by burning white birch under 4.32 km/h wind speed and zero slope was selected to idealize the conditions for all kinds of vehicles. According to the test results, the flame spread rate was 0.11 km/h (Figure 3). In other words, if the fire ignites at a point in the middle of a forest, the flames will create a circle with a 200 meter diameter, resulting in an approximately 31 500 square meter burning area within one hour. Based on this data, we created an evaluation table for the burned area during the arrival of each type of vehicle (Table 2). We assumed that the fire was in a forest with flat topography and 15 km in top view from a fire station. The ground-based vehicles must use the main road to approach the location. We designed a path scenario consisting of 15, 12, and 9 right-angled triangles, as shown in Figure 4 for the ground-based vehicles. For example, a truck will travel 12 km on the main road at a speed of 90 km/h , then stop by the roadside. At this point, firefighters will spread out fire hoses and begin extinguishing the fire. They can also deploy robotic firefighters, which means the average speed to reach fire will decrease, as shown in Table 2.
A case study was conducted to compare firefighting vehicles under ideal conditions, including a wind speed of 4.32 km/h, a zero slope etc. Although the cost of robotic firefighters is at the same level as UAVs, they are not as effective as UAV due to arrival time to the incident location. However, robotic firefighting technology can serve as an assistive tool to enhance the firefighter safety. The significant disadvantage of electric UAVs, in particular, is the limited battery duration, which can restrict the distance they can travel. As a result, UAVs are the most efficient for fires that are close to a station to allow for battery changes. Given the cost of airtankers and helicopters shown in Table 2, investing in a UAV-based firefighting system and station would be worthwhile.
6.2. Outlook
Global warming has increasingly intensified wildfires over the past decade, highlighting the inadequacy of traditional firefighting methods in effectively protecting people, property, and the environment. This growing challenge demands innovative approaches and advancements in firefighting technology and strategy. Our literature review has highlighted several critical areas for research and development, which are outlined below.
Monitoring systems are crucial for early detection, assessment, and the mop-up phase of firefighting operations. These systems help control fires and limit their spread while they are still small and manageable. This is a key area of ongoing development, where technology offers numerous new possibilities. In particular, there is a need for a sustainable hybrid monitoring system based on UAVs and satellites that operates automatically and harmonically day and night especially during the summer season in various countries.
Advancing UAV-based firefighting, there is a critical need to enhance both technology and autonomy in UAV systems for effective management of multiple drones simultaneously. Research and development should focus on establishing multiple UAV stations designed specifically for wildfire scenarios, including mobile stations for the rapid deployment of UAV swarms. Ensuring safe operation, especially when UAVs are used alongside manned aircraft, necessitates the development of effective airspace management strategies. Creating reliable AI-based methods for precise detection of fire fronts and hotspots is also crucial for improving UAV effectiveness in firefighting operations. Additionally, to enhance UAV-based fire suppression efficiency, it is essential to study and test various fire retardants to evaluate their extinguishing performance and electric consumption. Furthermore, developing quick battery and retardant tank replacement systems will be necessary to maintain UAV efficiency during firefighting tasks.
Considering the advantages of both flying and ground-based robotic systems, we propose the development of adaptive vehicles capable of both aerial flight and navigation over rough terrain. Such a vehicle could efficiently transport fire retardant from a station directly to the fire's location, significantly aiding in extinguishing the fire before it has a chance to spread. To effectively implement this technology, several advancements are necessary. For instance, developing a novel propeller design is crucial to enable the UAV to perform effectively in both aerial and ground-based operations. This would facilitate seamless transitions between flying and navigating challenging terrain, thus optimizing the firefighting process. Additionally, integrating robust systems for rapid battery and retardant tank replacement would further enhance the operational efficiency of these adaptive vehicles, ensuring they remain effective throughout extended firefighting missions.
To support decision making during wildfires, we propose a digital twin-based system that integrates relevant environmental information (e.g., topography, fuel, weather conditions) along with real-time data on fire status could serve as the foundation for a firefighting decision support system. This system could serve as a foundation for comprehensive firefighting decision support system, incorporating fire spread modeling to predict the fire’s progression and optimize extinguishing operations.
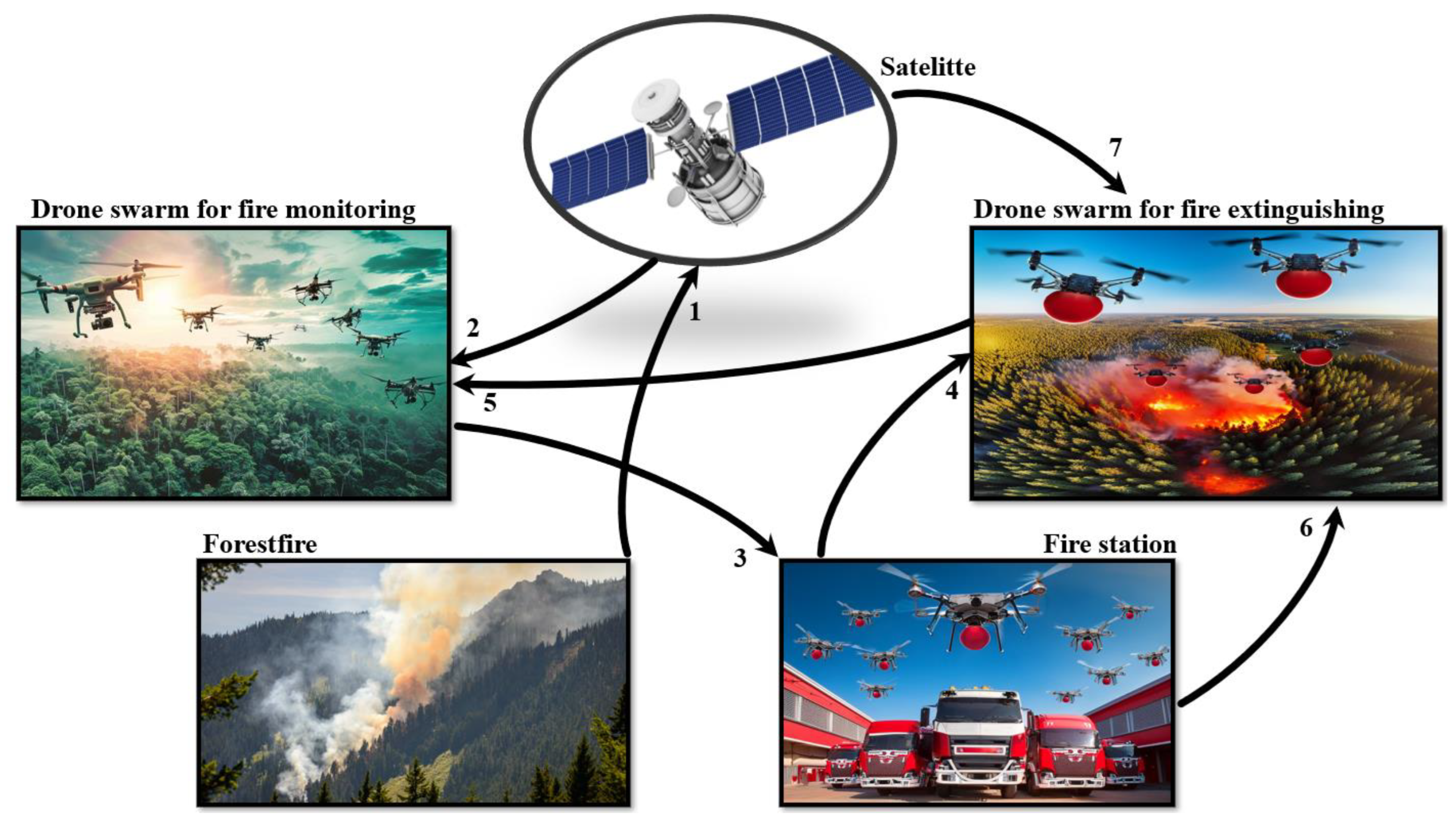
The proposed UAV-assisted firefighting system integrates satellite detection, UAV swarms, and adaptive bimodal vehicles to improve wildfire response. The main phases of the system are visualized in Figure 5 and detailed below:
- Initial Triggering: The operation begins with a satellite detecting suspicious signs, such as smoke or fire, in the forest. Satellite systems are essential for early fire detection, but there is a need to be integrated with UAVs for detailed situational picture to foster faster and more accurate detection of early fires. Furthermore, towers and citizen observations can be integrated to this system.
- UAV Swarm Deployment: Upon receiving an alert from the satellite system, a swarm of UAVs is launched from mobile stations strategically positioned within the forest. These UAVs take off to monitor the area, especially in cases where satellite data is obscured by clouds or has limited update intervals and spatial resolution. Fire monitoring UAV systems play a crucial role in assisting firefighting crews in the field, detecting fires and evaluating their progress.
- Precise Localization and Planning: The swarm of UAVs locates the fire's precise position to enable creating a detailed plan to respond. This includes assessing the fire's current status and identifying the best approach for extinguishing it. UAVs provide critical, real-time data that improves the accuracy of fire localization, helping crews make informed decisions.
- Firefighting Activation: Based on the data and plan generated by the UAV monitoring system, adaptive bimodal UAVs (capable of both flight and ground navigation) are deployed. These UAVs approach the fire's hot spot to spray retardant, aiming to extinguish the fire before it has a chance to spread further.
- Operational Efficiency and Autonomy: During firefighting operations, UAVs must monitor the forest to determine the most efficient path to the firefighting with minimal battery power usage. If battery power drops below a certain threshold, the adaptive UAV must return to its station to automatically replace the battery and refill the retardant tank. All of these processes, from monitoring to refueling, are managed autonomously by AI systems to ensure continuous and effective firefighting operations.
- Fire Suppression and Additional Measures: Ideally, the fire is quickly suppressed due to early detection and rapid intervention by the UAVs. However, if the fire begins to spread beyond control, more robust equipment, such as fire trucks or ground-based robots, is deployed. In such cases, the precise situational data provided by the UAVs enhances the efficiency of the firefighting efforts, allowing for better coordination and resource allocation.
- Post-Extinguishing Monitoring: After the fire has been extinguished, continuous monitoring is essential to prevent re-ignitions. Both satellite systems and UAV swarms continue to monitor the area, ensuring that any remaining hot spots are detected and addressed before they can escalate into another fire.
7. Conclusion
This review aims to attract the attention of researchers and establish a comprehensive framework for advancing robotic firefighting technology. We have compiled an extensive overview of various vehicles currently employed in firefighting, systematically classifying them and highlighting key trends for each vehicle type. Additionally, we provide a comparison of these vehicles based on realistic data under ideal conditions. To push the boundaries of current practices, we also propose a firefighting concept that integrates satellites, UAVs, and ground vehicles.
A critical aspect of fire suppression is the speed of intervention. Recent technological advancements offer the capability to perform fire detection and suppression operations with greater speed and efficiency. However, there is a need for innovative approaches to develop novel solutions. We propose that vehicles capable of both aerial and ground transportation are crucial for modern firefighting operations. While the air-tankers and helicopters are widely used, they often lack the precision and speed required and incur significant operational costs. In contrast, robotic technologies offer a promising alternative, potentially providing a more cost-effective and efficient solution.
UAVs have already demonstrated their potential in fire suppression, particularly in extinguishing fires by dropping fire-suppressing balls. However, their current capabilities are largely limited to managing grass fires and ground-level blazes within wildfires. UAVs are typically evaluated in controlled experimental environments that do not fully reflect real-world conditions. For example, the wind can cause a lot of electricity consumption during the operation as the UAVs work to stabilize their position. Therefore, more comprehensive research is needed to assess UAV performance in realistic scenarios, considering both energy consumption and fire suppression efficiency. UAV designs should be reimagined to enable seamless operation in both aerial and ground-based modes, enhancing their versatility and effectiveness in diverse firefighting situations.
References
- Nolan, Dennis P. Firefighting pumping systems at industrial facilities. William Andrew, 2011.
- “Five ways the Great Fire changed London”Museum of London, BBC, 2016.
- “The Age of Steam Fire Engines” The Fire Fighters Association of Missouri, 2022.
- “A Hot Spot for Firefighting History and Culture”Los Angeles Fire Museum, 2022.
- L. Charles Smeby, “Fire and Emergency Services Administration: Management and Leadership Practices”, 2nd Edition (Public Safety), Jones and Bartlett Learning, 2013.
- Kitano, Hiroaki, and Satoshi Tadokoro. "Robocup rescue: A grand challenge for multiagent and intelligent systems." AI magazine 22.1 (2001): 39-39.
- Coen, Janice L., and Philip J. Riggan. "Simulation and thermal imaging of the 2006 Esperanza Wildfire in southern California: application of a coupled weather–wildland fire model." International Journal of Wildland Fire 23.6 (2014): 755-770.
- “Heavy Firefighting Robot”, COLOSSUS, Shark Robotics, 2024.
- Lattimer, Brian Y., et al. "Use of unmanned aerial systems in outdoor firefighting." Fire Technology 59.6 (2023): 2961-2988.
- Wang, Meng, Xinghao Chen, and Xinyan Huang. "Robotic Firefighting: A Review and Future Perspective." Intelligent Building Fire Safety and Smart Firefighting (2024): 475-499.
- “Research and innovation, Forest fire research and innovation,” European Commission: Brussels, Belgium, 2024.
- Alqourabah, Hamood, Amgad Muneer, and Suliman Mohamed Fati. "A smart fire detection system using IoT technology with an automatic water sprinkler." International Journal of Electrical & Computer Engineering (2088-8708) 11.4 (2021).
- Cosgun, Ufuk, et al. "Visibility evaluation and suitability analysis of fire lookout towers in Mediterranean Region, Southwest Anatolia/Türkiye." Fire 6.8 (2023): 305.
- “Wildfire aviation”, Wildfire personnel and response tools, Response,Wildfire Service, Public safety and emergency services, British Columbia, 2023.
- “Firefighting vehicles”, Our vehicles, Istanbul Firefighter Office, 2024.
- Toan, Nguyen Thanh, et al. "A deep learning approach for early wildfire detection from hyperspectral satellite images." 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA). IEEE, 2019.
- Sharma, Anshul, et al. "An IoT-based forest fire detection system: design and testing." Multimedia Tools and Applications 83.13 (2024): 38685-38710.
- Polastre, Joseph, et al. "Analysis of wireless sensor networks for habitat monitoring." Wireless sensor networks (2004): 399-423.
- Martinez, Kirk, and Jane K. Hart. "Glacier monitoring: Deploying custom hardware in harsh environments." Wireless Sensor Networks: Deployments and Design Frameworks (2010): 245-258.
- Mazzeo, G. Mazzeo, G., et al. "Performance assessment of a Robust Satellite Technique (RST-FIRES) for forest fire detection and monitoring." EGU General Assembly Conference Abstracts. 2012.
- Karvonen, Hannu, et al. "Using a semi-autonomous drone swarm to support wildfire management–a concept of operations development study." International Conference on Human-Computer Interaction. Cham: Springer Nature Switzerland, 2023.
- Karjalainen, Väinö, et al. "Autonomous robotic drone system for mapping forest interiors." The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 48 (2024): 167-172.
- Liu, Wenjia, et al. "Multi-Target Optimization Strategy for Unmanned Aerial Vehicle Formation in Forest Fire Monitoring Based on Deep Q-Network Algorithm." Drones 8.5 (2024): 201.
- Ragbir, Prabhash, et al. "A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements." Drones 8.5 (2024): 169.
- Mu, Yunjie, et al. "Superpixel-Based Graph Convolutional Network for UAV Forest Fire Image Segmentation." Drones 8.4 (2024): 142.
- Çoğay, Sultan, and Gökhan Seçinti. "Phoenix: Aerial Monitoring for Fighting Wildfires." Drones 7.1 (2022): 19.
- Casbeer, David W., et al. "Forest fire monitoring with multiple small UAVs." Proceedings of the 2005, American Control Conference, 2005.. IEEE, 2005.
- Jin, Ji-Won, and Dahoon Ahn. "Development of a lightweight carbon fiber reinforced plastic water tank for fire trucks." Journal of Science: Advanced Materials and Devices 9.2 (2024): 100697.
- Wan, Yu, et al. "A flow capacity function approach for centrifugal impeller inlet design." Applied Energy 371 (2024): 123558.
- Shang, Fengju, et al. "Analysis of fire extinguishing performance and mechanisms in transformer oil pool fires by large-scale compressed nitrogen foam: Impact of different nozzle pressures." Journal of Fire Sciences (2024): 07349041241238151.
- Tian, Fengyuan, et al. "Suppression Behavior Difference Between Compressed Air/Nitrogen Foam over Liquid Fuel Surface Under Constant Radiation Heat Flux." Fire Technology 60.2 (2024): 1225-1243.
- Alwan, Omar Hussein, et al. "Systematic development of an autonomous robotic car for fire-fighting based on the interactive design approach." EUREKA: Physics and Engineering 3 (2024): 61-72.
- “Electric Amphibious All Terrain Emergency Fire Vehicle” Other Specialized Vehicles, Specialized Vehicle, Transportation, Made in China, 2024.
- NAFFCO Aviation, Fire Trucks, ARFF Vehicles on Custom Built Chassis, NAFFCO product, 2024.
- Gea, W. A. N. G., J. Gea, W. A. N. G., J. I. Yong-xing, and S. H. E. N. Yao-zong. "The 3rd Generation Fire Truck and its Spraying Technique." Procedia Engineering 11 (2011): 424-430.
- “Single Shot Turbojet Foam Fire Truck Products”, Fire Truck, Special Fire Truck, HMvehicle, 2024.
- 2024; 37. “Single Shot Turbojet Foam Fire Truck”Transportation, Specialized Vehicle, Fire Truck, MadeinChina, 2024.
- “Aerosol fire extinguisher for new energy vehicles or vehicles”, S-firefighting, 2024.
- Rekeny, Máté, and Ágoston Restás. "Increase Efficiency in Extinguishing Wildland Fires with Light Forest Fire Trucks." Delta 15.1 (2021): 82-91.
- “Helicopters”, National Interagency Fire Center, Boise, Idaho, 2024.
- Kal’avský, Peter, et al. "The efficiency of aerial firefighting in varying flying conditions." 2019 International Conference on Military Technologies (ICMT). IEEE, 2019.
- McMillan, Gregor J., and Haofeng Hector Xu. "Helicopter Aerial Work: Technology to Meet Growing Needs in Critical Missions." Journal of the American Helicopter Society 69.1 (2024): 1-18.
- “Air Tankers”, National Interagency Fire Center, Boise, Idaho, 2024.
- Balcerzak, A. Tomasz, et al. "The Polish perspective of using unmanned aerial vehicle systems in international firefighting and crisis management missions-legal and technological analysis." 2021 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2021.
- Karjalainen, Väinö, et al. "Autonomous robotic drone system for mapping forest interiors." The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 48 (2024): 167-172.
- Mishra, Balmukund, et al. "Drone-surveillance for search and rescue in natural disasters." Computer Communications 156 (2020): 1-10.
- Nex, Francesco, Filiberto Chiabrando, and Eija Honkavaara. "Preface: Workshop “IAMS-Intelligent Autonomous Mapping Systems”." ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences 10 (2023): 1159.
- Karila, Kirsi, et al. "Estimating grass sward quality and quantity parameters using drone remote sensing with deep neural networks." Remote Sensing 14.11 (2022): 2692.
- “100kg Payload Heavy-Duty High-Rise Aerial Forest Wildland Fire Fighting Defense Customizable Heavy Lift RC Firefighting Uav Drone”, Firefighting Drone, Hongfei Aviation Technology, 2024.
- Panahi, Fereidoun H., Farzad H. Panahi, and Tomoaki Ohtsuki. "A reinforcement learning-based fire warning and suppression system using unmanned aerial vehicles." IEEE Transactions on Instrumentation and Measurement 72 (2022): 1-16.
- Jin, Juan, Seunghan Kim, and Jiwon Moon. "Development of a Firefighting Drone for Constructing Fire-breaks to Suppress Nascent Low-Intensity Fires." Applied Sciences 14.4 (2024): 1652.
- Aydin, Burchan, et al. "Use of fire-extinguishing balls for a conceptual system of drone-assisted wildfire fighting." Drones 3.1 (2019): 17.
- Perez-Saura, David, et al. "Urban firefighting drones: Precise throwing from UAV." Journal of Intelligent & Robotic Systems 108.4 (2023): 66.
- Momeni, Maryam, and S. Mohammad J. Mirzapour Al-e. "Collaboration of thermal sensors and drones in fighting wildfires; Mathematical model and heuristic approach." Internet of Things 26 (2024): 101168.
- Mugnai, Michael, et al. "Towards Autonomous Firefighting UAVs: Online Planners for Obstacle Avoidance and Payload Delivery." Journal of Intelligent & Robotic Systems 110.1 (2024): 10.
- Blais, Marc-Andrė, and Moulay A. Akhloufi. "Drone Swarm Coordination Using Reinforcement Learning for Efficient Wildfires Fighting." SN Computer Science 5.3 (2024): 314.
- John, Josy, et al. "An Efficient Approach With Dynamic Multiswarm of UAVs for Forest Firefighting." IEEE Transactions on Systems, Man, and Cybernetics: Systems (2024).
- Su, Kuo L. "Automatic fire detection system using adaptive fusion algorithm for fire fighting robot." 2006 IEEE International Conference on Systems, Man and Cybernetics. Vol. 2. IEEE, 2006.
- Liljeback, Pal, Oyvind Stavdahl, and Anders Beitnes. "SnakeFighter-development of a water hydraulic fire fighting snake robot." 2006 9th international conference on control, automation, robotics and vision. IEEE, 2006.
- Chien, Ting L., et al. "Develop a multiple interface based fire fighting robot." 2007 IEEE International Conference on Mechatronics. IEEE, 2007.
- Liu, Pengcheng, et al. "Robot-assisted smart firefighting and interdisciplinary perspectives." 2016 22nd international conference on automation and computing (ICAC). IEEE, 2016.
- Battistoni, Pietro, et al. "A cyber-physical system for wildfire detection and firefighting." Future Internet 15.7 (2023): 237.
- Mittal, Shiva, et al. "CeaseFire: the fire fighting robot." 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN). IEEE, 2018.
- Aliff, Mohd, et al. "Development of fire fighting robot (QROB)." International Journal of Advanced Computer Science and Applications 10.1 (2019).
- Miyazawa, Kazuyoshi. "Fire robots developed by the Tokyo Fire Department." Advanced Robotics 16.6 (2002): 553-556.
- “HOWE & HOWE THERMITE™ RS1”,MESFire, 2024.
- “LUF-60”, LUF firefighter, 2024.
- “LUF-120”, LUF firefighter, 2024.
- “LUF-300”, LUF firefighter, 2024.
- “LUF-nano”, LUF firefighter, 2024.
- “Fire Fighting UGV” Parosha cheetah gosafer,2024.
- Koo, Eunmo, et al. "A simple physical model for forest fire spread rate." Fire Safety Science 8 (2005): 851-862.
- Simeonov, Peter, et al. "Evaluation of advanced curve speed warning systems to prevent fire truck rollover crashes." Journal of safety research 83 (2022): 388-399.
- “Firefighting Truck“, MadeinChina, 2024.
- “RTE robot” Firefighting robot, Rosenbauer, 2024.
- “Firefighting Robot“, Made in China, 2024.
- “How much does it cost to drop retardant on a fire?” Fire Aviation, 2020.
- “Firefighting Drone“, Made in China, 2024.
Figure 2.
The sections of the review.
Figure 3.
Flame spread rate with respect to wind velocity [74].
Figure 3.
Flame spread rate with respect to wind velocity [74].
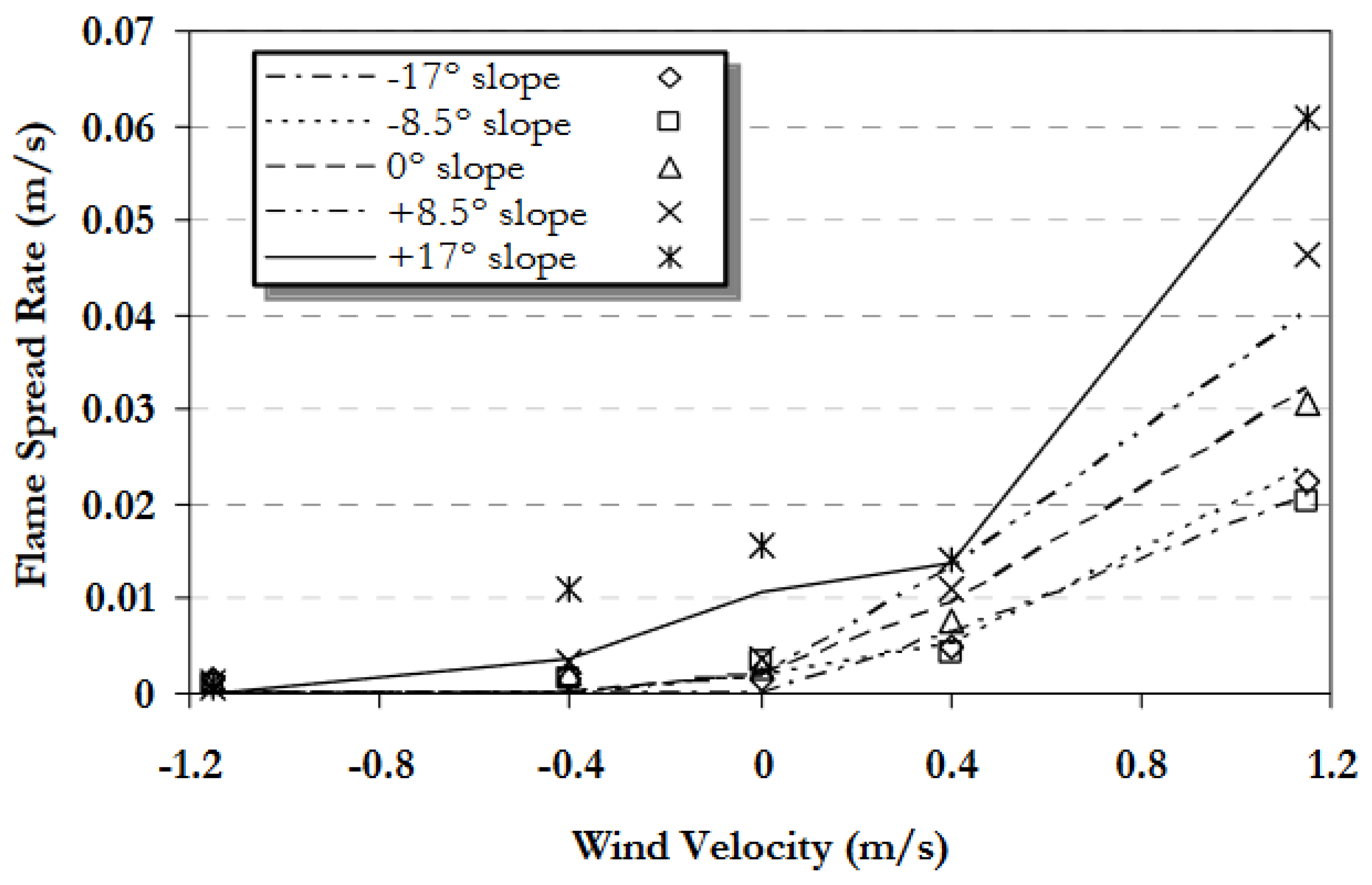
Figure 4.
A location of fire for ideal conditions of all the vehicles.
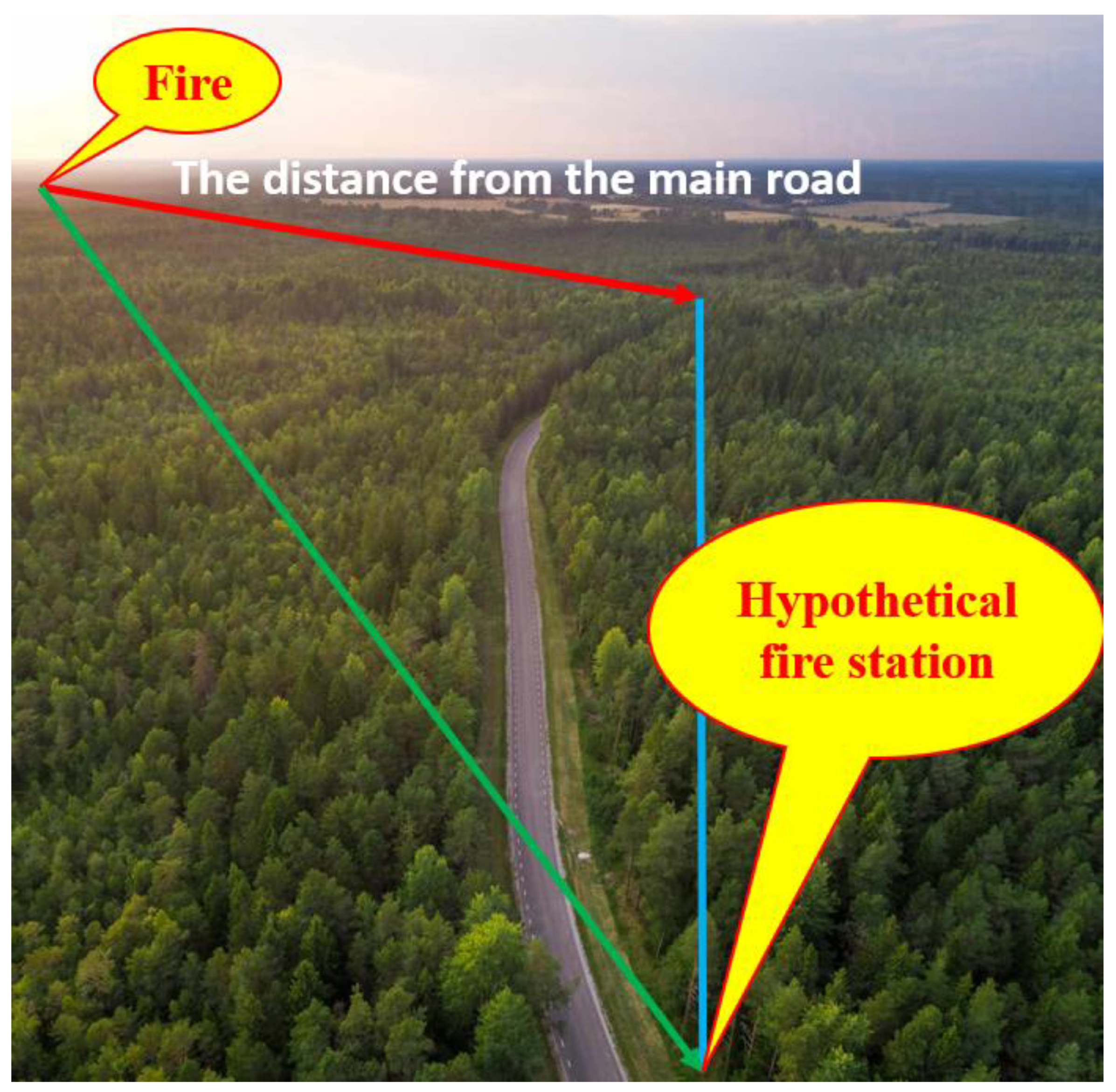

Table 1.
Various parameters of exemplary firefighting trucks [41].
Table 1.
Various parameters of exemplary firefighting trucks [41].
| Type | Crew (number of person) |
) | Weight) | |
|---|---|---|---|---|
| Raba R16 | 6 | 4 | 16 | 20 |
| Unimog U500 | 3 | 2,7 | 16 | 20 |
| Vw Amarok | 4 | 0,12 | 2,5 | 40 |
| Light Truck | 6 | 1 | 3,5 | 40 |
Table 2.
Comparison of fire fighting vehicles response speed.
| Type | Average weight with payload (Kg) |
Average speed on rough roads |
Predicted Burned Area during Arrival (m2) | |
|---|---|---|---|---|
| Fire Truck [75] | 30 000 | 40 | 21, 40 [76] | 15 750 |
| Robotic Firefighter [77] | 1000 | 5 | 21, 80 [78] | 126 000 |
| Airtanker, Helicopter [79] | 40 000 | 225 | 15, 10 000 | 2 100 |
| UAV [80] | 150 | 30 | 15, 80 | 15 750 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



