Submitted:
04 September 2024
Posted:
05 September 2024
You are already at the latest version
Abstract
Automation in agriculture is transforming the management of field tasks. This article focuses on identifying the needs and preliminary requirements for designing an autonomous robot for fruit harvesting. These robotic systems integrate advanced machine vision technologies and neural networks to accurately detect ripe fruits and obstacles, thereby optimizing harvesting efficiency. Additionally, the use of proximity and touch sensors is emphasized, ensuring careful and safe handling of fruits to prevent damage during harvesting. The technical specifications of these robots, including traction, speed, and their ability to operate on slopes, are evaluated to ensure adaptability to different types of crops and ground conditions. Perception systems, utilizing advanced cameras and sensors, provide essential data for crop inspection and route planning. Through a thorough analysis of operational demands, environmental conditions, and technical specifications, this article aims to establish a solid foundation for guiding the development and construction of an efficient and viable harvesting robot. The prospects and potential of fruit-harvesting robots to transform agriculture are highlighted, underscoring the importance of ongoing research and development to overcome current challenges and enhance the feasibility and effectiveness of these robotic systems.
Keywords:
Agricultural robotics
; Computer vision
; Autonomous harvesting
1. Introduction
In recent years, challenges related to food security have significantly increased, generating global concern. The world’s rapidly growing population is driving up the demand for food, placing substantial pressure on agricultural resources, which are dwindling due to a range of complex and interconnected factors.
One of the primary issues is the aging agricultural workforce. In many regions, farming has long been a traditional occupation, but younger generations are increasingly opting for careers in urban areas, moving away from agriculture. This trend is creating a labor gap in agriculture, making it difficult to sustain large-scale food production.
Additionally, agricultural land is being repurposed for the production of biofuels and alternative energies. While this practice is beneficial for reducing dependence on fossil fuels and mitigating climate change, it reduces the amount of land available for growing food. The competition for land use intensifies, leading to lower production of staple foods and, in some cases, higher food prices.
Other factors contributing to this situation include climate change, which affects agricultural productivity through extreme weather events, and soil degradation, which reduces the capacity of agricultural land to produce crops efficiently. Rapid urbanization also plays a crucial role, as rural areas are converted into urban spaces, further decreasing the land available for agriculture.
Moreover, government policies and unsustainable agricultural practices in some regions exacerbate the situation, as they are not always aligned with the needs of natural resource conservation and the long-term sustainability of food production.
The growing global demand for food, combined with the shrinking agricultural workforce, has driven the need for innovative technological solutions. Harvesting robots represent a promising response to these challenges, offering the capability to perform repetitive and physically demanding tasks efficiently. This study aims to identify and analyze the fundamental requirements that must be considered before designing and constructing an autonomous robot for fruit harvesting.
2. Methodology
To develop a comprehensive methodology for designing a harvesting robot, a multi-faceted research approach was implemented, structured into three main stages: an exhaustive literature review, an analysis of mechanical components, and an analysis of electronic components.
The literature review focused on several key aspects. First, existing harvesting robot designs were examined, particularly their main components, such as computer vision systems, robotic arms, and harvesting tools. Various design approaches were evaluated, highlighting their advantages and disadvantages in terms of efficiency, precision, and adaptability to different types of fruit crops.
Second, the operational capabilities of existing harvesting robots were explored in detail. This included an in-depth examination of their abilities to identify and select ripe fruits, navigate uneven agricultural terrain, and adapt to various climatic conditions. Special attention was given to the role of artificial intelligence and machine learning systems in enhancing accuracy in fruit identification and real-time decision-making.
Additionally, the technological and operational limitations documented in the literature were analyzed. This encompassed challenges such as obstacle detection and avoidance, energy management for prolonged operations, and component durability in harsh agricultural environments. Identifying these constraints was crucial for understanding the areas requiring improvement and for setting clear objectives in the design of the new harvesting robot.
The literature review also identified current trends in agricultural robot research and development. Significant advances were noted in the use of advanced sensors, automation technologies, and artificial intelligence algorithms. These trends suggest a shift towards more autonomous and precise systems, capable of operating with minimal human intervention and adapting to diverse field conditions.
Finally, the review underscored areas that require further attention and development in future research. These areas include improving the energy efficiency of robots, developing more robust navigation systems, and integrating communication technologies for the coordination of multiple robots in harvesting tasks. Additionally, the need for more in-depth studies on the interaction between robots and plants was identified, aiming to minimize crop damage during harvesting.
3. Operational Requirements
To effectively develop an autonomous robot for fruit harvesting, it is essential to clearly define the operational requirements that will ensure its performance and efficiency in the field. These requirements span several key areas, including the precise identification and selection of fruits, navigation and mobility across varied agricultural terrain, and delicate yet safe interaction with plants.
These requirements encompass not only the necessary technical and technological capabilities but also the practical needs and expectations arising from current field conditions and agricultural practices. By establishing these operational requirements, a solid foundation is laid for the design and development of a harvesting robot that is functional, efficient, and capable of seamlessly integrating into existing farming systems.
3.1. Fruit Identification and Selection
The ability to accurately identify and select ripe fruits is one of the most critical and complex functions a harvesting robot must perform. This capability not only determines the robot’s effectiveness in harvesting but also impacts the quality of the final product and the overall efficiency of the harvesting process. To achieve this, the robot must be equipped with a combination of advanced technologies that work in unison to ensure optimal performance.
3.1.1. Advanced Computer Vision Systems
The precise identification and selection of ripe fruits is one of the most critical and complex functions a harvesting robot must perform. This capability not only determines the robot’s harvesting effectiveness but also influences the quality of the final product and the overall efficiency of the harvesting process. To achieve this, the robot must be equipped with a combination of advanced technologies that work together to ensure optimal performance.
The first step in machine vision recognition is the capture of images of the fruits in the field. This is done using RGB cameras and hyperspectral cameras:
- a
- RGB cameras: These cameras capture color images, which are useful for detecting fruit color, a visual indicator of ripeness. The captured colors can be processed to identify whether the fruit has reached the characteristic color of ripeness.
- b
- Hyperspectral cameras: These cameras capture images at a wide spectrum of wavelengths, beyond what the human eye can see. This makes it possible to analyze internal characteristics of the fruit, such as sugar content and firmness, which are important in determining ripeness.
Figure 1.
Ripe fruit recognition system
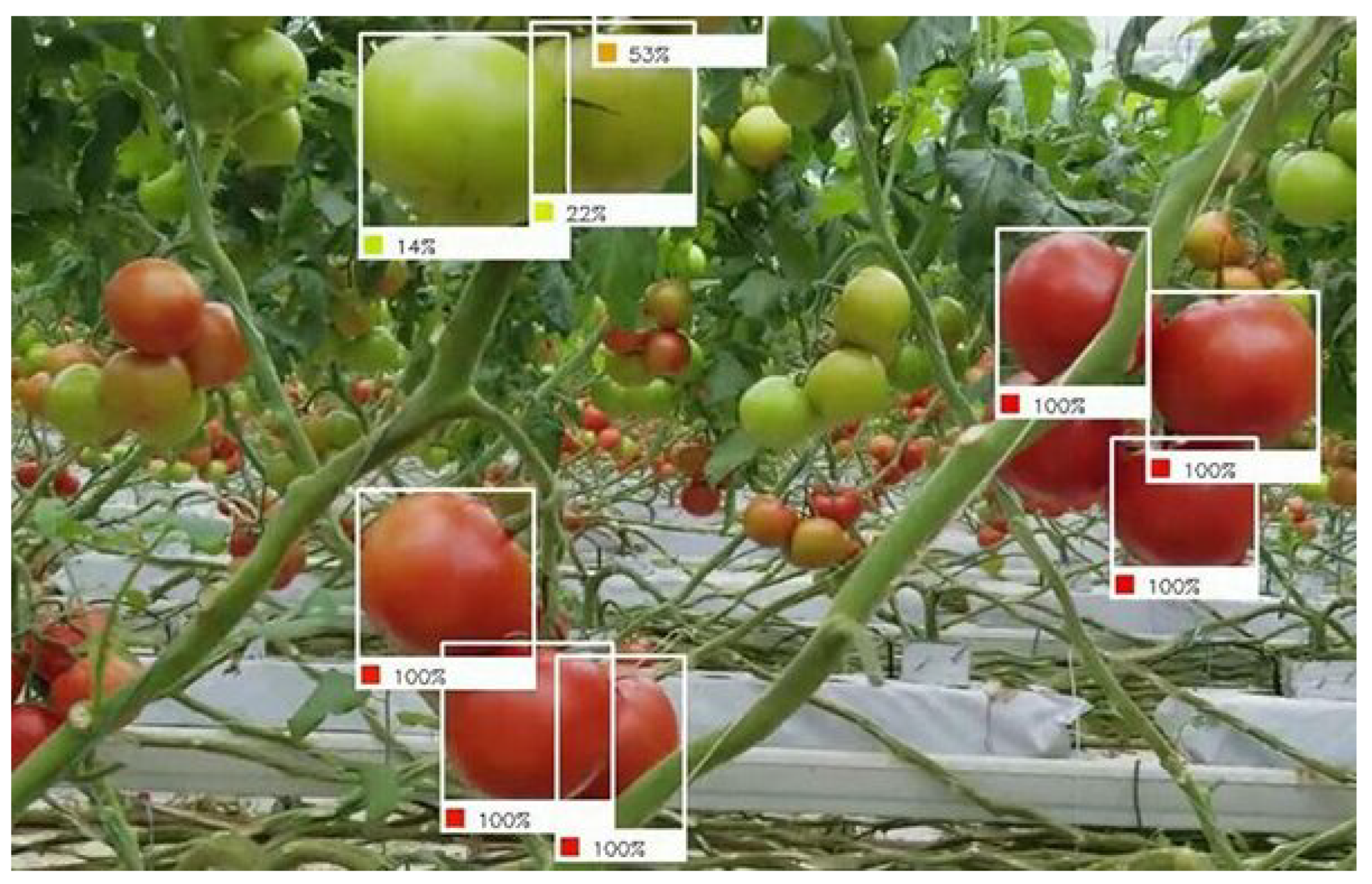
Once the images are captured, advanced image processing algorithms are used to analyze and extract relevant features. This processing includes several steps:
- i
- Pre-processing: It consists of improving the quality of the image and eliminating noise. Techniques such as lighting standardization and noise filtering are common at this stage.
- ii
- Image segmentation: Separates the fruits from the background of the image. This can be achieved by segmentation algorithms such as color threshold, edge-based segmentation, or the use of neural networks for semantic segmentation.
- iii
- Feature extraction: This involves identifying specific characteristics of fruits, such as color, texture, shape, and size. These characteristics are used to determine the state of ripeness of the fruit.
3.1.2. Machine Learning Algorithms
Machine learning algorithms are essential for processing captured images and making precise decisions. These algorithms, trained on extensive datasets, can accurately distinguish between ripe and unripe fruits. Techniques such as convolutional neural networks are commonly used for image pattern recognition, enabling the robot to identify not only ripeness but also other factors like defects or diseases in fruits.
The algorithms must be tailored to the specific fruit being harvested, as a single algorithm cannot serve all types of fruit. Before starting the design process, it is crucial to define the target fruit, as this will significantly impact the robot’s final performance.
According to the information provided by [3], each fruit is associated with its own database, resulting in unique weightings for each type. It is important to note that the values presented in Table 1 pertain to the work of Alvarado and Molina, and there is no need to replicate these exact values in independent projects.
Figure 2.
Images by Fruit Classes
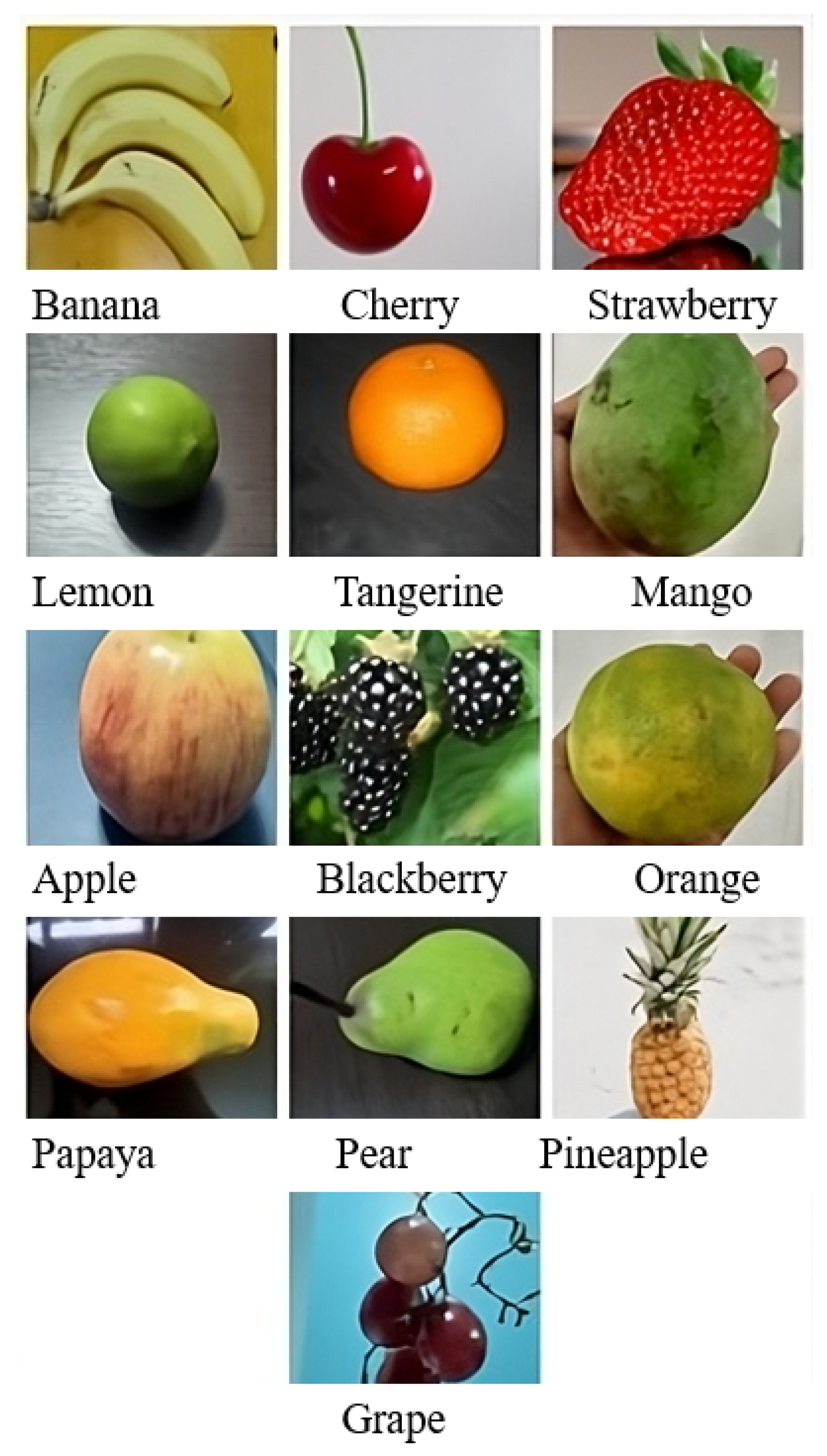

Table 1.
Resulting weighting for fruits
| Category | Sample | Percentage |
|---|---|---|
| Banana | 1.067 | 7.89 |
| Cherry | 1.001 | 7.41 |
| Strawberry | 1.004 | 7.43 |
| Lemon | 1.029 | 7.61 |
| Tangerine | 1.005 | 7.44 |
| Mango | 1.013 | 7.49 |
| Apple | 1.032 | 7.64 |
| Blackberry | 1.086 | 8.03 |
| Orange | 1.038 | 7.68 |
| Papaya | 1.026 | 7.59 |
| Pear | 1.070 | 7.92 |
| Pineapple | 1.018 | 7.53 |
| Grape | 1.127 | 8.34 |
1 1 The results shown in Table 1 apply only to the research of the corresponding authors. If a similar process is replicated, its own data validation must be performed, using an image database of the best possible resolution.
The use of simple machine vision algorithms and neural network-based systems for fruit recognition in harvesting robots reveals significant differences in focus, accuracy, and adaptability. Simple machine vision algorithms are deterministic and rely on predefined rules, utilizing techniques such as color segmentation and edge detection. These algorithms are easier to implement and require fewer computational resources, but they have limited accuracy and adaptability, particularly when faced with variations in environmental conditions and different types of fruits.
In contrast, neural network-based systems, particularly convolutional neural networks (CNNs), employ a deep learning approach to identify ripe fruits. These networks learn relevant features from large datasets during training, enabling them to better adapt to environmental variations and different fruit types. Although they require an intensive training phase and greater computational resources, neural networks offer higher accuracy and are more robust to changes in environmental conditions.
Simple machine vision algorithms are more suitable for systems with hardware constraints and less variable scenarios, while neural network-based systems provide superior accuracy and adaptability, making them ideal for environments with changing conditions and greater data variability. The choice between these approaches will depend on the specific requirements of the system and the operating conditions of the harvesting robot.
3.1.3. Proximity and Touch Sensors
In addition to machine vision, the harvesting robots use proximity and touch sensors to assess the ripeness of fruits. Proximity sensors help the robot approach the fruit accurately without damaging it. Touch sensors, on the other hand, allow the firmness of the fruit to be measured, another important indicator of ripeness. These sensors can be piezoelectric or based on resistivity technology.
3.1.3.1. Proximity Sensors:
Proximity sensors detect the presence and distance of nearby objects without the need for physical contact. There are several types of proximity sensors, but the most common in agricultural robotics are ultrasonic sensors, infrared (IR) sensors, and induction sensors:
- a
- Ultrasonic sensors: They emit high-frequency sound waves and measure the time it takes for the echo to return after bouncing off an object. The distance is calculated based on the flight time of the sound [29].
- b
- Infrared (IR) sensors: They emit infrared light and detect the amount of light reflected by a nearby object. The distance is determined by the intensity of the reflected light [3].
- c
- Induction sensors: They generate a magnetic field and detect changes in the field when a metal object approaches. They are less common in agriculture, but useful in industrial settings.
In harvesting robots, proximity sensors are used to:
- a
- Fruit detection: Identify the presence of fruits in the robot’s field of action.
- b
- Navigation and Obstacle Avoidance: Helping the robot move through the field without colliding with plants, branches, or other objects.
- c
- Precise positioning: Facilitate the precise approach of the robotic arm to the fruits to ensure damage-free harvesting [4].
3.1.3.2. Touch Sensors:
Touch sensors, also known as force and pressure sensors, detect physical contact and applied force. These sensors can be piezoelectric, resistive, or based on capacitive technology:
- a
- Piezoelectric sensors: They generate an electrical charge when pressure is applied. The amount of charge generated is proportional to the force applied [37].
- b
- Resistive sensors: They change their electrical resistance in response to pressure. The variation in resistance is used to measure the force applied.
- c
- Capacitive sensors: They detect changes in capacitance when pressure is applied to a sensitive surface. They are sensitive and accurate, suitable for detecting light forces.
In harvesting robots, touch sensors are used to:
- a
- Firmness assessment: To determine fruit ripeness based on its firmness, which is a key indicator of ripeness in some fruits.
- b
- Gentle handling: Allowing the robot to apply the correct amount of force when grasping and picking fruit, preventing damage and ensuring gentle picking [4].
- c
- Real-time feedback: Provide real-time information on contact and force applied, allowing immediate adjustments during picking to improve accuracy and reduce damage to fruits [37].
The use of pressure and touch sensors in harvesting robots presents several challenges that must be addressed to ensure effective and safe operation in agricultural environments.
Pressure and touch sensors need to be sufficiently sensitive to detect subtle variations in the pressure applied to fruits without exerting excessive force that could cause damage. Accuracy is critical for assessing fruit ripeness and firmness, as these factors can vary widely among different fruit types and environmental conditions.
Fruits come in various shapes, sizes, and textures, which complicates the design of sensors that are effective across all varieties. Some fruits may be more delicate and require gentle handling, while others may be more robust and tolerate greater pressure without damage.
Agricultural environments are also unpredictable with regard to factors such as temperature, humidity, and lighting. These conditions can impact the accuracy and reliability of pressure and touch sensors, making it challenging to maintain consistent and precise measurements across different environments.
3.2. Navigation and Mobility
Navigation and mobility are crucial aspects of fruit harvesting robots for their efficient and effective operation in agricultural environments. These robots must be capable of autonomously moving through crop fields, navigating between rows of plants, and accessing fruits for harvesting without causing damage.
To achieve efficient movement in the field, a harvesting robot requires an advanced navigation and positioning system. High-precision GPS and inertial navigation systems (INS) enable the robot to determine its exact location in the field and plan the optimal route for harvesting. Additionally, the use of LiDAR (Light Detection and Ranging) technology helps create three-dimensional maps of the environment, allowing the robot to detect and avoid obstacles while moving toward the selected fruits. The following section explains how this process works in detail.
3.2.1. Sensors and Awareness of the Environment
The harvesting robot can use several systems to be able to move around its environment, each method has advantages and disadvantages that deserve an independent study.
- a
- Cameras and vision systems: They capture images of the environment to detect ripe fruits, obstacles and other relevant elements in the field [4]. These systems can be monocular, stereoscopic, or even multispectral cameras, depending on specific detection needs. Just as cameras are used to recognize fruits, cameras can be used to generate an algorithm that allows the robot to move along an unobstructed route around the crop field.
- b
- Proximity sensors: They detect the presence of nearby objects, such as plants or structures, to avoid collisions and plan safe routes [65]. If the robot deviates from its planned route, location systems allow real-time corrections to be made to maintain accuracy and efficiency during harvesting. This helps optimize the operation time and resources used in the field.
- c
- Location systems: They use GPS, GNSS, or other methods to determine the robot’s precise position in the field [65]. The robot’s position must be precise to ensure that it does not deviate from the path laid out for harvesting.
- d
- Odometry sensors: They monitor the robot’s movement and direction to calculate the distance traveled and the current orientation. The information provided by the odometry sensors allows the robot to move precisely along the rows of plants and between crops, ensuring that each fruit is harvested efficiently and without damage [4]. By knowing the distance traveled, odometry sensors help optimize the use of energy and resources during robot operation, increasing autonomy and reducing downtime.
3.2.2. Route Planning and Navigation
Route planning for the navigation of a harvesting robot is a crucial process that involves determining the best trajectory for the robot to move efficiently through the crop field and harvest the fruits optimally, this process is done autonomously by the robot.
- a
- Mapping the environment: Before starting any harvesting operation, the robot uses its sensors, such as cameras and perception systems, to create a detailed map of the agricultural environment. This map includes information on the arrangement of the rows of plants, the location of ripe fruits, obstacles such as trees or agricultural structures, and other relevant elements.
- b
- Route planning: Based on the generated map and the harvesting objectives, the robot plans the best route to move efficiently between the rows of plants and collect the identified fruits. The robot decides the order in which it will pick the fruits based on criteria such as proximity, accessibility, and picking efficiency. For example, you can prioritize fruits that are closer or in a more accessible position. Using route planning algorithms, such as the algorithm, the robot calculates the shortest and safest route to reach each point of interest. During route planning, the robot also considers how to avoid obstacles detected in the environment.
- c
- Autonomous navigation: During operation, the robot uses navigation algorithms that combine information from the map of the environment, the robot’s current position, and sensor data to make real-time decisions about direction and speed of movement.
In short, route planning for the navigation of a harvesting robot combines the ability to perceive the environment with advanced trajectory planning algorithms to achieve efficient and accurate harvesting in dynamic and varied agricultural environments. Autonomous movement in the agricultural environment involves GPS systems and LIDAR sensors for precise navigation.
- i
- GPS (Global Positioning System): GPS works by receiving signals from satellites in orbit. A GPS receiver in the robot picks up these signals and uses them to calculate the robot’s position in terms of geographic coordinates (latitude, longitude, and altitude). Using the trilateration technique, the GPS receiver calculates its exact position by measuring the time it takes for signals to travel from various satellites to the receiver. The GPS provides the robot with information about its location in the crop field. This is crucial for planning efficient harvesting routes and ensuring that the robot covers the entire growing area without skipping any sections. In large fields where multiple robots may be operating simultaneously, GPS helps coordinate movements between robots to avoid collisions and optimize field coverage. The data collected, such as the location of ripe fruits, can be georeferenced, allowing a subsequent analysis on the distribution and conditions of the crop.
- ii
- LiDAR (Light Detection and Ranging): LiDAR works by emitting pulses of laser light into the environment and measuring the time it takes for light to reflect and return to the sensor. By measuring these distances in multiple directions, LiDAR creates a three-dimensional "point cloud" that accurately represents the structure of the environment. LiDAR allows the robot to detect obstacles in its immediate environment, such as plants, trees, and agricultural structures, in real-time. This is essential to avoid collisions and damage to both the robot and the crop. By generating a detailed three-dimensional map of the environment, LiDAR helps the robot navigate precisely between rows of plants and locate ripe fruits for picking. The detailed environmental information provided by the LiDAR allows the robot to position its harvesting arms and tools with pinpoint accuracy, ensuring effective harvesting without damaging surrounding fruits or plants.
- iii
- GPS and LiDAR integration: While GPS provides the robot’s global location in the field, LiDAR provides detailed mapping of the immediate environment. By combining this data, the robot can plan and execute harvesting routes more efficiently and safely. GPS and LiDAR data are integrated using sensor fusion algorithms that combine the advantages of both systems to improve navigation accuracy and obstacle detection. As the robot moves, GPS and LiDAR data is continuously updated, allowing the robot to adapt to changes in the environment and maintain an optimal trajectory.
Figure 3.
Figure 3 shows a robot in the process of harvesting, to achieve this it must have a very precise positioning system due to the difficult conditions of its environment.
Figure 3.
Figure 3 shows a robot in the process of harvesting, to achieve this it must have a very precise positioning system due to the difficult conditions of its environment.

3.3. Environmental Conditions
The environmental conditions for a fruit harvesting robot are critical factors that affect its harvesting performance and efficiency. These conditions include physical aspects of the field, crop characteristics, and environmental factors.
3.3.1. Ground Conditions:
The physical conditions of the field become one of the most obvious and impossible to avoid, it is very different a robot in a controlled environment of a greenhouse or a test laboratory from that of a real field. Terrain with unevenness, slopes, or irregularities can hinder the robot’s movement and require advanced navigation and stability systems to maintain harvesting accuracy [77]. In addition, the presence of stones, logs, and other obstacles that the robot must detect and avoid to prevent damage and maintain continuous operation. In fields with high plant density, the robot must navigate through narrow spaces, which requires precise route planning and fine maneuverability. Variability in plant height and thickness can affect the visibility and accessibility of fruits, necessitating adjustments to the robot’s perception systems and harvesting mechanisms.
3.3.2. Characteristics of the Crop
Different fruits have different physical characteristics such as size, shape, color, and texture, which requires the robot to adjust its detection and manipulation systems for each specific type of fruit [69]. The robot must be able to identify ripe fruits and differentiate them from unripe or damaged ones, using vision systems and artificial intelligence to ensure high-quality harvesting.
3.3.3. Environmental Factors
Variable lighting due to the sun, plant shadows, or clouds can affect the effectiveness of the robot’s vision systems. Advanced image processing systems must compensate for these changes to maintain accuracy [62]. The presence of moisture or rain can affect the robot’s sensors and electronics, as well as complicating the terrain and making it more difficult to get around. Extreme temperatures can affect the performance and durability of the robot’s mechanical and electronic components, requiring materials and designs that withstand these conditions. In dusty or dirty environments, the robot’s sensors and mobility systems may be affected. Automatic cleaning systems and sensor protection are essential to maintain operability.
3.3.4. Interaction with Other Elements
The robot must operate safely in the presence of human workers, stopping or swerving to avoid accidents. Proximity sensors and collision avoidance algorithms are essential. In large fields, there may be multiple robots operating simultaneously. A communication and coordination system is necessary to avoid collisions and optimize collective efficiency.
3.4. Technical Specifications
To detail the technical specifications of a fruit harvesting robot, we can present a table that includes key aspects such as dimensions, perception systems, navigation capabilities, autonomy, among others. Here’s an example table with hypothetical technical specifications for a fruit-harvesting robot:
Table 2.
Technical specifications for a harvesting robot.
| Specification | Detail |
|---|---|
| Dimensions | |
| Longitude | 1.5 meters |
| Wide | 0.8 meters |
| Height | 1.2 meters |
| Weight | 120 kg |
| Mobility | |
| Traction type | Wheels |
| Maximum speed | 1.5 km/h |
| Slope capacity | Up to 20 degrees |
| Perception Systems | |
| Cameras | RGB camera, multispectral camera |
| Lidar | 3D LiDAR with 30-meter range |
| Proximity sensors | Ultrasound, infrared |
| Touch sensors | Pressure sensors on the harvesting arm |
| Navigation System | |
| GPS | Accuracy of ±2 cm |
| Odometry sensors | Encoders on the wheels |
| Processing and Control | |
| Processing unit | Multicore CPU, GPU for image processing |
| AI algorithms | Neural networks for fruit detection, route planning |
| Gathering Capacity | |
| Robotic arms | 1-2 robotic arms with adaptive grippers |
| Time per pickup | 5-10 seconds per fruit |
| Load capacity | Up to 20 kg of fruit harvested |
| Autonomy | |
| Battery | Lithium battery, 10 hours of continuous operation |
| Solar charging | Optional solar panels for extended range |
| Interaction and Security | |
| Communication | Wi-Fi, Bluetooth |
| User interface | Touch screen, mobile app |
| Safety sensors | Proximity and emergency sensors for detention |
| Environmental Conditions | |
| Operating temperature | -10°C to 40°C |
| Water resistance | IP65 |
| Relative humidity | 10% - 90% non-condensing |
1 Table 2 shows a general overview of the technical specifications for a harvesting robot (Data are only referential for future research). Below is the detail of why these parameters have been selected.
3.4.1. Dimensions:
The compact dimensions of a fruit picking robot are essential for its operation in agricultural fields, where rows of plants are often narrow and densely populated. These dimensions allow the robot to move with agility and precision between rows, avoiding damage to plants and ensuring access to all areas of the field. For example, a length of 1.5 meters, a width of 0.8 meters, and a height of 1.2 meters are ideal ratios that balance maneuverability and operational capability, allowing the robot to enter tight spaces without compromising its functionality [4]. A moderate weight, around 120 kg, ensures that the robot maintains adequate stability while moving through the uneven and sometimes sloping terrain of crop fields. This weight is sufficient to provide the necessary traction on uneven surfaces and prevent the robot from tipping over, while also allowing for a significant payload of harvested fruits. In addition, this balanced weight facilitates the transport of the robot to the field and between different locations, allowing greater operational flexibility [69].
The combination of compact dimensions and moderate weight also has a positive influence on the robot’s energy efficiency. Smaller size and weight reduce power consumption during movement, extending battery life and increasing the operating time between recharges. This is crucial to maximize harvesting time in the field and minimize operational disruptions, contributing to more productive and economical harvesting [59].
3.4.2. Mobility:
The choice of traction type is a fundamental aspect in the design of a fruit harvesting robot, as it directly influences its ability to move efficiently through different types of agricultural land. On firm, flat terrain, the wheels offer greater speed and maneuverability compared to other alternatives. This allows the robot to move quickly between rows of plants, increasing harvesting efficiency [62].
Wheeled systems are typically more energy-efficient, which can extend battery life and increase the robot’s operating time before needing a recharge. They are generally simpler and easier to maintain, which can reduce maintenance costs and downtime.
The maximum speed of a fruit picking robot must balance operational efficiency with the delicacy necessary not to damage plants or fruits. A controlled speed, typically around 1.5 km/h, allows the robot to move fast enough to maintain a high picking rate, but slow enough to ensure that each fruit is properly identified and harvested without causing damage [58].
A fruit picking robot’s ability to operate in fields with moderate slopes is crucial to its versatility and usefulness in various agricultural environments. A slope capability of up to 20 degrees allows the robot to maintain its efficiency in terrain with varied topography. Many agricultural fields are not perfectly flat and can have hills and slopes. The robot’s ability to operate in these terrains ensures that it can be used in a wide range of locations and conditions [37].
3.4.3. Perception Systems:
The perception systems in a fruit picking robot are critical to its ability to detect and pick fruit efficiently. Among these systems, cameras play a crucial role in providing essential visual data for accurate fruit identification and detection of obstacles in the environment. The RGB cameras capture color images, allowing the robot to differentiate between ripe and unripe fruits based on color. For example, in apple picking, deep red indicates ripeness, while green may indicate that the fruit is not yet ready to be picked [4]. Multispectral cameras capture images at different wavelengths of the light spectrum, allowing crop health to be assessed. They can detect variations in leaf and fruit reflectance that indicate water stress, disease, or nutrient deficiencies [14].
3.4.4. Navigation Systems:
GPS and GNSS systems provide high accuracy in determining the robot’s position in the field, usually with an accuracy of a few centimeters when using advanced technologies such as GPS RTK (Real-Time Kinematic). This precision is essential for the robot to be able to follow predefined routes and return to specific points of interest accurately [15]. By using GPS/GNSS positioning data, the robot can map and cover the entire field systematically, ensuring that no areas are left unharvested. This is especially important on large farms where full manual coverage would be impractical.
Odometry sensors are crucial for monitoring the robot’s movement, providing information about the distance traveled and direction. These sensors are typically embedded in the wheels or the robot’s traction system, recording each rotation of the wheels and translating this data into linear and angular displacement [5]. Odometry allows the robot to make constant corrections in its trajectory, compensating for possible slippage or deviations. This is especially useful when GPS/GNSS experiences temporary signal loss or interference, such as in areas with limited satellite coverage.
The combination of GPS/GNSS data and odometry sensors allows for more accurate and reliable navigation. Sensor fusion integrates the advantages of both systems, using GPS/GNSS for global location and odometry for detailed motion tracking in areas with limited coverage or interference. Sensor fusion also provides redundancy, meaning that if one of the systems fails, the robot can continue to navigate using the data from the other system. This increases operational safety and ensures that collection continues uninterrupted.
The data collected by the navigation and perception sensors is used to create and update maps of the environment in real time. These maps help the robot better understand its surroundings and make informed decisions about how best to move and gather fruit. Advanced navigation systems allow the robot to adapt to changes in the field environment, such as new plantings or modifications in the arrangement of plant rows. This ensures that the robot can operate effectively in different field conditions and configurations.
3.4.5. Processing and Control:
The processing unit in a fruit picking robot is the heart of the control system, responsible for executing the algorithms necessary for the robot’s autonomous operation. Given the complexity of the tasks that the robot must perform, the processing unit must be extremely powerful and efficient. Multi-core processors, such as advanced CPUs and GPUs (Graphics Processing Units), are essential for handling the data-intensive workloads that artificial intelligence (AI) algorithms require. These processors enable parallel processing of multiple data streams, significantly improving the robot’s speed and efficiency [67].
A lot of RAM and fast storage (such as SSDs) is crucial to handle large volumes of data that are generated during robot operation. This includes high-resolution imagery, 3D maps of the environment, and real-time sensor data.
Optimization algorithms, such as the particle swarm algorithm (PSO) and the genetic algorithm (GA), are used to adjust routes in real-time based on sensor data. This allows the robot to adapt to changes in the environment, such as the appearance of new obstacles or variation in fruit density [38].
Real-time control systems allow the robot to respond quickly to changes in the environment and instructions from AI algorithms. These controllers adjust the robot’s actuators, such as traction motors and harvesting arms, to perform precise and coordinated movements (Pérez-Ruiz et al., 2013). A modular software architecture allows for easy integration and upgrade of different control system components. This includes modules for perception, planning, control, and communication, which can be developed and optimized independently [5].
3.4.6. Gathering Capacity:
Robotic arms are critical components in a fruit-picking robot, designed to perform the physical task of harvesting fruits from plants. To adapt to the variety of fruits in a field, these arms are equipped with adaptive grippers and advanced technologies that allow for efficient and careful picking.
The robotic arms are designed with multiple degrees of freedom, allowing for a wide range of motion. This mobility is essential to reach fruits in different positions and heights within the tree or plant, ensuring a complete and efficient harvest [4]. The grippers on the robotic arms are designed to accommodate different sizes and textures of fruits. They use soft, flexible materials to grip delicate fruits without damaging them. In addition, the grippers can adjust their grip strength in real time, based on touch sensors, to prevent bruising or damage [74].
The time it takes for the robot to pick each fruit is a critical balance between speed and care. An optimized picking time ensures that the robot can cover large areas quickly without compromising the quality of the harvested fruits. Route planning algorithms optimize the movement of the robotic arm to minimize travel time between fruits. This includes calculating the most efficient sequence for harvesting fruit in a given area, reducing the total operating time [40]. Precise synchronization between different robot components, such as arm movement and robot movement, ensures smooth and continuous operation. This reduces downtime and increases harvesting efficiency [54].
The load capacity of the harvesting robot is another essential aspect that determines its operational efficiency. Adequate load capacity allows the robot to operate for extended periods without the need to empty its fruit container, thus increasing productivity. Cargo containers are designed to support a significant amount of fruit, using durable materials that can handle the weight and conditions of the field. This allows the robot to harvest large volumes of fruit before requiring emptying [20]. The storage system inside the container is designed to protect the harvested fruits. This includes padded compartments and mechanisms that ensure that fruits are not damaged by the movement or weight of other stacked fruits [21].
3.4.7. Autonomy:
The battery is the main component that powers all the robot’s systems, from the traction motors to the processing and perception systems. An efficient battery design ensures that the robot can operate for extended periods without the need for frequent recharging, which is essential for productivity at harvest. Lithium-ion batteries are a common choice due to their high energy density, allowing a large amount of energy to be stored in a relatively small and lightweight package. These batteries also have a long lifespan and are capable of withstanding numerous charge and discharge cycles without significant degradation [48]. Fruit picking robots are designed to be energy efficient, minimizing energy consumption without compromising performance. This includes the use of high-efficiency electric motors and the optimization of control algorithms that adjust energy use according to operational needs [27].
The integration of solar charging is a viable option to extend the autonomy of fruit picking robots, especially in agricultural fields with high sun exposure. Solar panels can provide additional power, reducing reliance on frequent recharges and increasing operation time in the field. Robots equipped with solar charging systems can operate in a hybrid mode, using solar power during the day and switching to battery power at night or in low-light conditions. This maximizes operating time and reduces the need for external refills [12].
3.4.8. Interaction and Security:
The communication capability of a fruit picking robot is critical to its efficient and safe operation. This feature allows operators to monitor and control the robot remotely, optimizing harvesting operations and ensuring a quick response to any necessary issues or adjustments. The integration of Wi-Fi and Bluetooth modules allows a wireless connection between the robot and control devices, such as tablets or laptops. These technologies facilitate the transmission of data in real time and allow immediate adjustments in the robot’s operation [23]. For large-field operations, long-range communication technologies such as LoRa or 5G provide extended coverage and robust connection. These technologies allow the robot to be monitored and controlled from greater distances, ensuring that operations are not interrupted by range limitations [10].
The ability to transmit data in real-time allows operators to see the robot’s current status, including battery levels, location, and harvesting performance. This visibility helps to identify and fix problems quickly [32]. Operators can send commands to the robot to adjust its route, speed, or harvesting method. This flexibility is crucial for adapting to changing conditions in the field or for addressing unforeseen situations [45]. An intuitive user interface is essential for effective setup and control of the fruit picking robot. This interface should be user-friendly and provide access to all the features needed to operate the robot efficiently. Safety is a priority in the design of fruit picking robots. Integrated safety sensors ensure that the robot operates safely, preventing damage to both the environment and the robot itself.
An emergency stop system allows operators to stop the robot instantly in the event of imminent danger. This system can be activated manually or automatically through safety sensors (Murphy, 2014). Continuous monitoring systems assess the condition of the robot and its surroundings, detecting any abnormal conditions that may pose a risk. Real-time alerts and diagnostics allow operators to take corrective actions quickly [68].
3.4.9. Environmental Conditions:
The ability to operate in a wide range of temperatures is critical for fruit picking robots, as fruit picking robots must operate in both hot and cold climates. The robot’s electronic and mechanical components are designed to operate effectively and safely within a specific range of temperatures. This ensures that the robot can perform its fruit-picking duties without being affected by extreme environmental conditions.
The materials used in the manufacture of the robot must be able to withstand extreme temperatures without significant degradation. For example, engineering plastics and metal alloys are used to maintain their structural and electrical properties in extreme heat or cold conditions [1]. In warm environments, active cooling systems, such as fans or heat sinks, can be integrated to keep component operating temperatures within safe limits. This prevents overheating and ensures the robot’s operational reliability [28].
Water resistance is crucial for fruit picking robots, as these often operate in fields where humidity can be high due to irrigation or variable weather conditions. Protection against water intrusion ensures that the robot’s sensitive electronics and mechanical systems can operate without risk of moisture damage. Harvesting robots usually comply with IP (Ingress Protection) standards, which indicate the level of protection against solids and liquids. For example, an IP67-rated robot can be temporarily submerged in water to a certain depth without damage [2]. Robots can be equipped with environmental sensors that continuously monitor the temperature and relative humidity conditions of the environment. This data can be used to dynamically adjust the robot’s operation and optimize its performance under varying environmental conditions [79]. Adaptive control algorithms allow the robot to automatically adjust its operating parameters according to the detected environmental conditions, ensuring consistent and efficient performance in different environments [71].
These specifications ensure that the fruit harvesting robot can operate efficiently, safely, and autonomously in various agricultural environments, optimizing harvesting and minimizing damage to fruits and plants.
4. Real Example
Bacchus is a project that has been developed with the purpose of carrying out agricultural inspection and harvesting efficiently. In collaboration with Robotnik, the RB-VOGUI+ DUAL mobile robot has been implemented, equipped with two integrated UR robotic arms. This system incorporates an advanced set of sensors that allow for the collection of environmental data and detailed inspection of crops. During the harvesting phase, force sensors play a crucial role, ensuring the robots’ precision in handling the fruits. In addition, adaptable grippers made using additive manufacturing techniques are used, specifically designed to handle the fruits delicately and without causing damage.
Figure 4.
Harvesting robot in operation (Bacchus)

5. Economic Evaluation
In the context of fruit picking robots, economic evaluation plays a crucial role in determining their viability and acceptance in the agricultural industry. This evaluation covers several fundamental aspects that directly impact the profitability and efficiency of the operation. The cost-benefit analysis focuses on comparing the costs of acquiring, operating, and maintaining the robot with the benefits derived from its use. This includes savings in labor costs, which can be significant given that robots can operate continuously and do not require breaks or wages. In addition, the increase in harvesting efficiency is considered, which allows crops to be harvested in less time and with less waste. This analysis helps farmers understand how the implementation of the robot can positively impact their total production costs and the profitability of their farming operations.
Estimating the return on investment is another key aspect of economic evaluation. The period of time needed to recover the initial investment made in the acquisition of the robot is calculated, taking into account the cost savings and the increase in income derived from more efficient and higher quality production. For farmers, knowing the Return on Investment ROI provides them with a clear perspective on when they can expect to make additional net profits after they have implemented the fruit picking robot. This estimate considers factors such as the robot’s lifespan, agricultural production cycles, and economic market conditions.
6. Discussion
Automation in agriculture is significantly transforming how field tasks, particularly fruit harvesting, are managed. This article provides a comprehensive analysis of the needs and preliminary requirements for designing an autonomous fruit-harvesting robot. The integration of advanced machine vision technologies and neural networks for accurate fruit detection and obstacle avoidance enhances harvesting efficiency. Additionally, proximity and touch sensors are pivotal for careful and safe fruit handling, reducing damage during the harvesting process. This discussion examines the implications and potential of these technologies, as well as the challenges that remain.
Harvesting robots offer a promising solution to address labor shortages in agriculture. The use of advanced technologies such as machine vision and neural networks enables precise detection of ripe fruits and obstacles, optimizing harvesting efficiency. Perception systems, incorporating cameras and sensors, provide critical data for crop inspection and route planning, facilitating adaptability to various crop types and ground conditions.
The implementation of proximity and touch sensors for careful fruit handling is particularly noteworthy. These sensors minimize damage to the fruit during harvesting, improving the quality of the final product and reducing waste. The robots’ ability to operate on slopes and adapt to diverse agricultural conditions highlights their flexibility and potential to enhance harvesting efficiency.
Despite significant advancements, several challenges must be addressed to achieve effective integration of robots in agriculture. The literature review identifies limitations in current systems, such as obstacle detection and avoidance, energy management for prolonged operations, and component durability in harsh agricultural environments. These issues can impact the operability and efficiency of robots and must be considered in future designs.
Moreover, the cost of implementing and maintaining these robots could be a barrier to widespread adoption, especially for smaller-scale farms. The economic feasibility of these systems should be carefully evaluated, taking into account both initial costs and long-term benefits.
The potential of fruit-harvesting robots to revolutionize agriculture is substantial. The trend toward more autonomous and precise systems, driven by advanced artificial intelligence algorithms and cutting-edge sensors, promises to further improve efficiency and accuracy in harvesting. However, additional research is needed in areas such as robot-plant interaction, energy efficiency, and coordination of multiple robots.
Collaboration among researchers, engineers, and farmers will be crucial to overcoming these challenges and fostering the adoption of robotic technologies in agriculture. Ongoing research and development of new technological solutions will be essential to addressing current limitations and maximizing the benefits of advanced robotic systems for fruit harvesting.
In conclusion, the automation of fruit harvesting has the potential to revolutionize agriculture by providing innovative solutions to persistent problems. However, a continuous focus on research and development is necessary to address existing challenges and fully leverage the opportunities presented by advanced robotic systems.
7. Conclusions
Identifying needs and requirements is an essential step in the design of an autonomous robot for fruit harvesting. Considering operational aspects, environmental conditions and technical specifications allows to establish a solid basis for the development of a robot that is not only efficient and reliable, but also economically viable. The next steps include validating these requirements through prototyping and field testing, ensuring that the robot meets farmers’ expectations and needs.
The development and application of fruit-picking robots represent a significant advance in modern agriculture, offering innovative solutions to improve the efficiency and sustainability of farming operations. Throughout this analysis, several critical areas have been explored that highlight the importance and potential impact of these robots in the agricultural sector. Fruit picking robots integrate advanced technologies such as computer vision, neural networks, and specialized sensor systems. These systems allow for accurate detection of ripe fruits, autonomous navigation in complex agricultural environments and careful handling of fruits, ensuring efficiency and quality in harvesting.
The adoption of harvesting robots offers significant operational benefits, including reduced labor required, increased harvesting efficiency, and minimized waste. In addition, cost-benefit analyses and ROI estimation demonstrate that the implementation of these robots can generate significant long-term savings for farmers, thus improving the profitability of their operations.
Despite technological advances, there are significant challenges that need to be addressed. These include adaptability to different crop types and environmental conditions, operational safety in dynamic environments, and effective integration with existing farming systems. Overcoming these challenges will require continued collaboration between researchers, engineers, and farmers to improve the design, functionality, and acceptance of harvesting robots in the agricultural industry.
The future of fruit-picking robots looks bright, with continued innovations that could include improvements in autonomy, harvesting capacity, and integration with data-driven farm management systems. In addition, further customization and adaptability of these robots is expected to meet the specific needs of different crop types and agricultural conditions.
Fruit picking robots represent a significant evolution towards more efficient, sustainable and profitable farming practices. Over time, these technologies are expected to continue to transform the global agricultural landscape, offering innovative solutions to meet the challenges of the 21st century in food production.
Author Contributions
Conceptualization, M.S.; Methodology, M.S.; Formal Analysis, M.S. and P.P.; Investigation, M.S. and J.R.; Data Curation, P.P. and J.R.; Writing—Original Draft Preparation, M.S.; Writing—Review and Editing, P.P.; Supervision, P.P.; Validation, J.R. All authors have read and agreed to the published version of the manuscript.
Funding
The author(s) declared having received the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Universitario Rumiñahui as part of the research department.
Acknowledgments
The activities that gave rise to the results presented were carried out in the context of the project to develop a fruit harvesting robot. This project is in its initial stage and the research gave rise to the results presented, with the support of the Rumiñahui University Institute. We deeply appreciate the collaboration of all the researchers, students and professionals involved in this project, whose dedication and effort have been fundamental to achieving our objectives.
Conflicts of Interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
References
- Almada, J. M., Rodríguez, P. L., González, A. M., Hernández, S. R., Martínez, T. F., & Pérez, C. R. (2018). Advances in Materials for Robotic Applications. Journal of Materials Science, 53(6), 3989-4014.
- Alur, R., Gupta, P., Patel, K., & Sharma, N. (2020). Ingress Protection (IP) Testing and Classification. International Journal of Advanced Research in Engineering and Technology, 11(1), 17-24.
- Alvarado, J. V. A., & Molina, M. A. C. (2020). Classification of fruits based on convolutional neural networks. Polo del Conocimiento: Revista científica-profesional, 5(1), 3-22.
- Bac, C. W., Hemming, J., van Tuijl, B. A. J., Barth, R., Wais, E., & Henten, E. J. van (2014). Harvesting Robots for High-value Crops: State-of-the-art Review and Challenges Ahead. Journal of Field Robotics, 31(6), 888-911.
- Bakhtiari, F., Fathian, M., Khalilian, A., & Ahmad, D. (2020). Modular Robotics for Agriculture: From Concept to Implementation. Agricultural Engineering International: CIGR Journal, 22(2), 50-61.
- Bargoti, S., & Underwood, J. (2017). Deep Fruit Detection in Orchards. IEEE Robotics and Automation Letters, 2(2), 940-947.
- Bechar, A., Vigneault, C., & Ben-Zion, M. (2021). Safety Mechanisms in Agricultural Robotics. Robotics and Autonomous Systems, 2021.
- Bishop, C. M. (2006). Pattern Recognition and Machine Learning. Springer.
- Boykov, Y., & Funka-Lea, G. (2006). Graph Cuts and Efficient N-D Image Segmentation. International Journal of Computer Vision, 70(2), 109-131.
- Centenaro, M., Vangelista, L., Zanella, A., & Zorzi, M. (2016). Long-Range Communications in Unlicensed Bands: The Rising Stars in the IoT and Smart City Scenarios. IEEE Wireless Communications, 23(5), 60-67. [CrossRef]
- Chen, W., Liu, H., & He, Y. (2017). Design and Simulation of Ventilation Systems for Robotic Applications. Journal of Mechanical Design, 139(7), 071405.
- Chin, H. L., Su, Y. H., & Li, W. L. (2011). Solar Energy Harvesting for Agricultural Robots. Journal of Field Robotics, 28(2), 111-120.
- Cubero, S., Aleixos, N., Molto, E., & Blasco, J. (2016). Advances in Machine Vision Applications for Automatic Inspection and Quality Evaluation of Fruits and Vegetables. Food and Bioprocess Technology, 9(1), 280-298.
- Dong, S. , Wang, X., & Li, Y. (2020). Energy-Efficient Design for Field Robots. Applied Energy, 2020.
- Dupont, C., Moreau, R., & Langlois, G. (2021). Real-Time Data Processing in Agricultural Robotics. IEEE Transactions on Automation Science and Engineering, 2021.
- Esram, T., & Chapman, P. L. (2007). Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Transactions on Energy Conversion, 22(2), 439-449. [CrossRef]
- Fraisse, G., Boulard, T., & Baille, A. (2011). Energy Harvesting in Agriculture: Solar Power for Agricultural Robots. Renewable Energy, 36(5), 1374-1379.
- Gonzalez, R. C., & Woods, R. E. (2008). Digital Image Processing. Pearson Prentice Hall.
- Green, M. A., Hishikawa, Y., Dunlop, E. D., Levi, D. H., Hohl-Ebinger, J., & Ho-Baillie, A. W. Y. (2015). Solar Cell Efficiency Tables (Version 45). Progress in Photovoltaics: Research and Applications, 23(1), 1-9.
- Gu, L., Zhang, Q., Liu, H., & Zhang, D. (2016). Waterproofing Technology for Robotic Applications. IEEE Transactions on Robotics, 32(3), 627-636.
- Gupta, M., Chauhan, N., & Kaur, R. (2019). Advances in Sensing and Communication Technologies for Robotic Fruit Harvesting: A Review. IEEE Access, 7, 95392-95412.
- Häberli, L., Lange, S., Hutter, M., & Siegwart, R. (2019). Climate Chamber Testing of Robotic Systems for Extreme Environments. Robotics and Autonomous Systems, 117, 240-249.
- Hammoudeh, M., Newman, R., & Mount, M. (2015). A Wireless Sensor Network Border Monitoring System: Deployment Issues and Routing Protocols. IEEE Sensors Journal, 15(7), 3863-3872.
- Hellström, T., Ringdahl, O., & Svensson, A. (2012). An Autonomous Robot for Harvesting Strawberries in Greenhouses. Robotics and Autonomous Systems, 61(9), 1122-1130.
- Henten, E. J. van, Barth, R., Hemming, J., & Edan, Y. (2016). Field Robots for Harvesting: State of the Art and Future Challenges. International Journal of Robotics and Automation, 31(3), 299-324.
- Hinton, G., Deng, L., Yu, D., Dahl, G. E., Mohamed, A. r., Jaitly, N.,... & Kingsbury, B. (2012). Deep Learning for Vision-Based Fruit Recognition. IEEE Transactions on Neural Networks and Learning Systems, 2012.
- Hsieh, S. H., Wu, C. H., & Chen, P. C. (2014). Energy-Efficient Robotic Harvesting Systems. IEEE Transactions on Automation Science and Engineering, 11(3), 806-816.
- Huang, Y., Shen, W., & Jiang, L. (2015). Active Cooling Systems for Robotic Applications. Journal of Thermal Science and Engineering Applications, 7(2), 021009.
- Iida, M., Taniguchi, Y., & Sugiyama, S. (2019). Proximity Sensor System for Fruit Detection and Positioning in Harvesting Robots. Sensors, 19(3), 819.
- Jiang, H., Yu, P., & Wang, J. (2019). Corrosion Resistant Materials for Robotics in Harsh Environments. Materials Research Express, 6(2), 026402.
- Johnson, R. B., & Wiles, J. (2003). Effective User Interface Design for Robotic Systems. Human-Computer Interaction Studies in Robots and Automation Systems, 5, 133-149.
- Kamei, K., Nishio, S., Hagita, N., & Sato, M. (2012). Cloud Networked Robotics. IEEE Network, 26(3), 28-34. [CrossRef]
- Kang, S., Kim, J., & Park, H. (2018). Immersion Testing of Robotics in Water Environments. IEEE Robotics and Automation Letters, 3(2), 965-972.
- Kempkes, F. L. K., Wopereis, H. A. N., & Dijk, C. J. van (2018). Robotic Harvesting of Fruit in Orchards: Simulation and Field Tests. International Journal of Agricultural Robotics, 4(1), 77-92.
- Kennedy, J., & Eberhart, R. (1995). Particle Swarm Optimization. Proceedings of ICNN’95 - International Conference on Neural Networks, 4, 1942-1948.
- Kim, J., Lee, S., & Park, C. (2019). Solar-Powered Autonomous Robots for Agriculture. Renewable Energy, 2019.
- Kondo, N. (2010). Automation on Fruit and Vegetable Grading System and Food Traceability. Trends in Food Science & Technology, 21(3), 145-152. [CrossRef]
- Kragh, M., Hansen, S. M., & Jørgensen, R. N. (2017). Agricultural Robot Navigation using 3D Vision and LiDAR. Robotics and Autonomous Systems, 92, 195-206.
- Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012). ImageNet Classification with Deep Convolutional Neural Networks. Advances in Neural Information Processing Systems, 25, 1097-1105.
- LaValle, S. M. (2006). Planning Algorithms. Cambridge University Press.
- Lehnert, C., English, A., Perez, T., & McCool, C. (2018). Field Robotics: Achieving Robustness in Agricultural Environments. Robotics and Autonomous Systems, 2018.
- Li, H., Lee, W. S., & Burks, T. (2017). Autonomous Orchard Vehicle for Fruit Harvesting: Navigation and Localisation. Biosystems Engineering, 153, 109-120.
- Long, J., Shelhamer, E., & Darrell, T. (2015). Fully Convolutional Networks for Semantic Segmentation. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 3431-3440.
- Marucci, A. , Caprara, C., Frontoni, E., Iacchetti, A., & Longhi, S. (2019). Safety Protocols for Human-Robot Interaction in Agriculture. Agronomy Research, 17(2), 347-356.
- Miller, T. , Redfield, S., & Smith, B. (2017). System-Level Fault Detection for Autonomous Robots. Robotics and Autonomous Systems, 91, 112-122.
- Murphy, R. R. (2014). Disaster Robotics. MIT Press.
- Neretti, A., Di Carlo, M., & Messina, P. (2016). Performance of Solar Panels in Dusty Environments. Solar Energy, 135, 158-166.
- Nitta, N. , Wu, F., Lee, J. T., & Yushin, G. (2015). Li-ion Battery Materials: Present and Future. Materials Today, 18(5), 252-264. [CrossRef]
- Norman, D. A. (2013). The Design of Everyday Things: Revised and Expanded Edition. Basic Books.
- Otsu, N. (1979). A Threshold Selection Method from Gray-Level Histograms. IEEE Transactions on Systems, Man, and Cybernetics, 9(1), 62-66. [CrossRef]
- Pajarola, R. (2002). Efficient Level-of-Detail Computation of Point-Based Representations. IEEE Transactions on Visualization and Computer Graphics, 10(1), 70-83.
- Palacin, M. R. (2016). Recent Advances in Rechargeable Battery Materials: A Chemist’s Perspective. Chemical Society Reviews, 45(8), 2747-2786.
- Patil, D. , & Oza, K. (2018). Application of Image Processing in Fruit and Vegetable Analysis: A Review. Journal of Advanced Research in Computer and Communication Engineering, 7(2), 567-570.
- Pedersen, S. M. , Fountas, S., Blackmore, B. S., Gylling, M., & Pedersen, J. L. (2008). Agricultural Robots – System Analysis and Economic Feasibility. Precision Agriculture, 9(5), 341-366.
- Pérez, L. J., Núñez, F., Sánchez, J., & Guerrero, J. (2019). Grape Detection and Grading Based on Hyperspectral Imaging and Machine Learning. Computers and Electronics in Agriculture, 162, 12-19.
- Pérez-Ruiz, M., Agüera, J., & Rodríguez-Lizana, A. (2013). Mapping Orchard Yield and Efficiency using a Robot. Computers and Electronics in Agriculture, 95, 54-66.
- Pesaran, A. , Santhanagopalan, S., & Kim, G. H. (2013). Battery Thermal Management System Design Modeling. Journal of Power Sources, 238, 301-312.
- Qin, J., Burks, T. F., Kim, D. G., & Choi, D. (2013). Hyperspectral Imaging for Detecting Bruises in Apples. Journal of Food Engineering, 114(1), 1-10.
- Radhakrishnan, S. , Balasubramanian, R., & Subramanian, V. (2016). Terrain Adaptation for Agricultural Robots. International Journal of Agricultural Robotics, 2(1), 45-59.
- Riek, L. D. (2017). Healthcare Robotics. Communications of the ACM, 60(11), 68-78.
- Romero, P. , García, E., & González, R. (2019). Weather-Resistant Design for Outdoor Robotics. Journal of Field Robotics, 36(5), 943-959.
- Rotz, S., Fraser, E. D. G., & Martin, R. C. (2020). Economic Analysis of Robot Harvesters in Agriculture. Agricultural Systems, 183, 102874.
- Sa, I., Ge, Z., Dayoub, F., Upcroft, B., Perez, T., McCool, C., & Corke, P. (2016). DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors, 16(8), 1222. [CrossRef]
- Sabatini, M., Giorgioni, M., & Rinaldi, R. (2018). Wireless Communication in Precision Agriculture. Computers and Electronics in Agriculture, 151, 141-150.
- Scheiner, L. , Plapper, P., & Lasnier, A. (2017). Proximity Sensing for Safe Human-Robot Interaction in Collaborative Working Cells. Robotics and Autonomous Systems, 98, 219-234.
- Shamshiri, R. R. , Weltzien, C., Hameed, I. A., Jablonowski, N. D., Ball, A., & Auat Cheein, F. A. (2018). Research and Development in Agricultural Robotics: A Perspective of Digital Farming. International Journal of Agricultural and Biological Engineering, 11(4), 1-14.
- Shukla, S., Verma, P., & Sharma, A. (2015). Autonomous Navigation in Agricultural Fields Using GPS and LIDAR Sensors. Sensors, 15(10), 26891-26906.
- Siciliano, B. , & Khatib, O. (2016). Springer Handbook of Robotics. Springer.
- Silwal, A., Gongal, A., Karkee, M., Zhang, Q., & Lewis, K. (2017). Design of an Apple Harvesting Robot: Adaptive and Delicate Picking Mechanism. Transactions of the ASABE, 60(5), 1501-1510.
- Slaughter, D. C. , Giles, D. K., & Downey, D. (2008). Vision-Based Sensing for Automation of Agricultural Vehicles. Computers and Electronics in Agriculture, 59(1-2), 64-78.
- Tang, L. , Zhou, J., & Liu, S. (2021). Cost-Benefit Analysis of Robotic Systems in Agriculture. Precision Agriculture, 22(5), 1247-1262.
- Underwood, J., Hung, C., & Sukkarieh, S. (2016). Mapping and Classification of Orchards Using LiDAR Data. Journal of Field Robotics, 33(6), 927-945.
- Van Henten, E. J., Hemming, J., Van Tuijl, B. A. J., Kornet, J. G., Meuleman, J., Bontsema, J., & Van Os, E. A. (2003). An Autonomous Robot for Harvesting Cucumbers in Greenhouses. Autonomous Robots, 13(3), 241-258. [CrossRef]
- Van Henten, E. J. , Bac, C. W., Van Tuijl, B. A. J., Barth, R., Hemming, J., & Bontsema, J. (2006). Robotic Harvesting of Fruit: Precision and Delicacy. Biosystems Engineering, 95(2), 135-147.
- Vasconez, J. P. , Kantor, G. A., & Pérez, J. A. (2019). Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks. IEEE Industrial Electronics Magazine, 13(3), 48-58.
- Wang, D., Zhang, Y., & Sun, Y. (2017). Obstacle Detection and Avoidance for Mobile Robots in Agriculture. International Journal of Advanced Robotic Systems, 14(4), 1729881417717054.
- Zhang, Y., Jiang, L., & Lim, S. (2017). Advances in Silicon Solar Cells. Annual Review of Materials Research, 47, 61-92.
- Zhang, Z., He, L., & Wang, S. (2020). Development and Field Evaluation of a Robotic Apple Harvester. Biosystems Engineering, 193, 166-179.
- Zhou, Q., Liu, X., & Meng, Q. (2021). Environmental Sensing and Adaptation in Robotic Systems. IEEE Sensors Journal, 21(10), 11372-11381.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



