
Submitted:
11 September 2024
Posted:
12 September 2024
You are already at the latest version
Abstract
The emerging working mode of coordinated trucks and drones has demonstrated significant practical potential in various fields, including logistics and delivery, intelligence surveillance reconnaissance, area monitoring, and patrol. The seamless collaboration between trucks and drones is garnering widespread attention in academia and has emerged as a key technology for achieving efficient and secure transportation. This paper provides a comprehensive and in-depth review of the research status on the routing problem for coordinated trucks and drones, covering aspects such as application background, cooperative modes, configurations, issues have been taken into consideration, and solution methodologies.
Keywords:
Drones
; Trucks
; Vehicle routing problem
; Survey
1. Introduction
The drone market has witnessed a notable trend toward the miniaturization of Unmanned Aerial Vehicles (UAVs or drones), with smaller drones emerging as the prevalent models in commercial sectors. Nevertheless, the constraints of these drones become evident when faced with large-scale operations. This scenario unveils a fresh avenue for cooperation between drones and ground vehicles (considered trucks in this paper).
Table 1 illustrates that both the truck and the drone have their respective advantages and limitations. However, their complementary functional characteristics offer clear collaborative benefits. Firstly, the truck acts as a mobile base station for the drone, enhancing its operational scope. Owing to its excellent endurance, the truck can be equipped with mechanisms for drone launch and landing. Secondly, the truck can carry multiple spare batteries or be fitted with charging equipment, enhancing the drone’s continuous operational capacity enabling swift battery replacement or recharging. Furthermore, leveraging its substantial payload capacity, the truck can serve as a mobile warehouse, and pre-load necessary materials or packages for the drone’s subsequent work. Lastly, the drone’s versatility, unconstrained by road conditions, enables it to swiftly and directly access challenging environments or high-risk areas.
Acknowledging the significant advantages of cooperated trucks and drones, scholars have intensively explored this field, especially following the introduction of the Flying Sidekick Traveling Salesman Problem (FSTSP) by Murry and Chu in 2015 [1].
In order to carry out a comprehensive investigation, we employed the keywords “truck drone” and “route planning” on the Web of Science (WOS) platform, searching for publications from 2015 to 2024. Among the 256 articles retrieved, 225 were directly related to the routing challenges with the truck-drone cooperation. The distribution of these studies over the years is depicted in the Figure 1. As can be seen, there has been a notable surge in publications within this domain, with over 120 new papers emerging in 2022 and 2023 alone, constituting half of the total number of articles.
In this survey, we first categorize the problem context into three main application areas: logistics and delivery, intelligence surveillance and data collection, as well as area monitoring and patrol. This classification helps to clarify the various scenarios where truck-drone teamwork can be utilized.
Considering the variety of application scenarios, the functions performed by trucks and drones in these tasks differ considerably. Based on the unique roles these two vehicles play in the collaboration, the truck-drone cooperation mode can be categorized into four primary types: synchronous operation of truck and drone, independent operation of truck and drone, the truck serving as auxiliary support to the drone, and the drone serving as auxiliary support to the truck. We not only provide a detailed description of these modes, but also conduct an in-depth analysis of the challenges that such collaboration introduces to route planning in each mode.
With the growing exploration of cooperation between trucks and drones, contemporary research extends beyond the analysis of individual vehicles. To assess the impact of vehicle quantity on route planning, we further explore the complexities of route planning across diverse vehicle counts. Specifically, drawing from research conducted over the past two years, we concentrate on three situations in multiple trucks and multiple drones: multiple combinations of single truck and single drone, multiple combinations of single truck and multiple drones, and multiple trucks and multiple drones without predetermined pairings.
Furthermore, current research gives greater consideration to the optimization challenges in real-world scenarios. We therefore perform a thorough analysis of objective functions and constraints, categorizing them as time-related factors, drone performance limits, and operational constraints. By addressing these constraints, we attain a broader understanding of the issues investigated in the majority of the existing literature. Moreover, we have conducted a supplementary review that focuses on dynamic issues, which have received increased attention in the past two years. To our knowledge, this is the inaugural instance where dynamic issues have been included in such a review.
Lastly, we provide an overview of the solution methodologies employed, categorizing them into four types: the exact algorithms, the heuristic algorithms, the metaheuristic algorithms, and other algorithms. For each category, we undertake a systematic analysis and summation, contributing to a deeper understanding of the methodologies available to address these challenges.
In the context of prior research, several reviews have indeed delved into the collaboration between trucks and drones from various perspectives. Nonetheless, it bears mentioning that a substantial number of novel studies have surfaced in the last two years. This review provides a thorough examination of existing literature across three key aspects: cooperation modes, problem constraints, and solution methodologies. The distinctions between this review and existing reviews can be summarized as follows:
Khoufi et al. [2] examined the role of drones in assisting trucks through an extension of the TSP-D and VRP-D problems. However, as drone technology has advanced, there have been some studies highlighting drones’ capability to undertake tasks independently.
Chung et al. [3] focused on the drone route planning problem, categorizing it into drone operations (DO) and combined drone-truck operations (DTCO). In this process, the challenges and constraints encountered in real-world truck-drone collaboration have not been fully explored.
Macrina et al. [4] also discussed the application and challenges of drones in the commercial field, specifically from the angle of drone assistance.
Li et al. [5] summarized the collaborative route planning between trucks and drones from a two-echelon perspective, where the truck route constitutes the first echelon and the drone route the second.
Jazemi et al. [6] focused on the scenario where unmanned devices (robots or drones) aid truck deliveries in last-mile delivery.
It is apparent that the current reviews have neglected a significant portion of research conducted over the past five years, particularly those studies from the last two years, and have not provided a comprehensive summary analysis including more than 200 articles. Furthermore, existing reviews are inadequate in terms of depth and comprehensiveness when it comes to addressing the problem constraints and challenges associated with collaborative route planning for trucks and drones.
To rectify this gap, the present paper embarks on a detailed examination of all literature on truck-drone cooperated route planning in the following sections.
The paper is structured as follows: Section 2 provides a summary of the current background of the application. Section 3 presents the classification of the truck-drone cooperation mode. In Section 4, an analysis of the configurations of trucks and drones involved in the current literature is provided. Section 5 offers an analysis of the problem objectives and constraints considered so far. The algorithms and solution methodologies applied in the literature are presented in Section 6. Finally, some possible existing problems and future research directions are given in Section 7.
2. Application Background
2.1. Logistics and Delivery
As depicted in Figure 1, the field of logistics and delivery exhibits a research focus on the challenges and solutions pertaining to routing problems associated with cooperated trucks and drones. This research hotspot has emerged not only due to the exponential growth of e-commerce in recent years, but also as a response to the escalating demands for efficient, cost-effective, and environmentally friendly logistics systems [7,8,9]. Moreover, this emphasis is driven by the intricate and practical characteristics inherent in this collaborative mode concerning payload capacity, coordination mechanisms, and path planning. The cooperated trucks and drones in logistics and delivery mainly applied in the following scenarios:
(1) Last-mile delivery [10,11,12,13,14,15,16,17,18]: The last-mile delivery, serving as a crucial link in the logistics and delivery chain, is often hindered by traffic congestion [19,20,21,22] and inconvenient transportation in remote areas [23,24]. However, the integration of truck-drone application can effectively address the limitations faced by traditional delivery trucks at present: drones can take off from trucks and directly deliver parcels to customers, circumventing various obstacles encountered during ground transportation while enhancing timeliness and accuracy of deliveries [25].
(2) Emergency supply delivery [26,27,28,29,30,31,32,33,34,35]: The collaborative integration of trucks and drones demonstrates unparalleled advantages in supply delivery for natural disasters and medical emergencies. The ground truck enables swift transportation of emergency supplies to the vicinity of disaster areas, while the drone overcomes terrain and road restrictions to accurately deliver supplies to affected regions.
(3) Takeout and food delivery [36,37,38,39,40]: With the advancement of the takeout and retail industry, there is a growing demand for timely delivery, and the utilization of cooperated trucks and drones can enhance operational efficiency, ensuring food freshness and customer satisfaction [41]. Moreover, cooperative operations facilitate expedited and accurate delivery processes that align with the pursuit of prompt service in contemporary urban lifestyles.
2.2. Intelligence Surveillance Reconnaissance and Data Collection
The coordinated utilization of trucks and drones has demonstrated advantages in intelligence surveillance, reconnaissance, and data collection. In this operational mode, the truck remains stationed in a secure and accessible area while deploying the drone to conduct reconnaissance in inaccessible or hazardous regions, thereby reducing potential risks associated with direct human exposure [42,43,44]. Moreover, the drone can access areas where traffic is obstructed due to natural disasters for real-time exploration [45,46,47,48,49]. Simultaneously, the truck serves as a mobile base station from which the drone can take off and land to extend its effective reconnaissance radius [50,51]. Additionally, the direct communication distance between the drone and truck ensures stable and efficient transmission of reconnaissance information for real-time processing and analysis.
2.3. Area Monitoring and Patrol
Compared to intelligence reconnaissance, the cooperative application in area monitoring and security patrol places greater emphasis on achieving comprehensive coverage of specific areas. Typical examples are agricultural vegetation monitoring [52,53] and pesticide spraying [54], where a drone equipped with a high-definition camera is utilized for real-time monitoring of vegetation growth and environmental changes, while a truck serves as a mobile platform for the drone to replace batteries or sensors. Another similar scenario involves fire monitoring in forest areas [55]. Through collaboration, this approach effectively ensures comprehensive coverage of mountainous forest regions and enables timely detection and mitigation of potential fire hazards.
Additionally, this mode has also been implemented for road traffic monitoring and high-voltage power line inspection. In the field of transportation [56,57,58,59,60], drones are immune to traffic congestion, enabling real-time transmission of road traffic conditions and providing a foundation for decision-making in traffic management departments. In the realm of high-voltage power line inspection [61], drone utilization can reduce personnel workload and security risks while ensuring the safe and stable operation of the power system.
3. Cooperative Modes of Trucks and Drones
The cooperative mode of trucks and drones not only directly impacts the operational efficiency of the system but also influences the complexity associated with solving routing problems [3]. These cooperative modes can be categorized into four types: synchronous operation of truck and drone, independent operation of truck and drone, the truck serving as auxiliary support to the drone and the drone serving as auxiliary support to the truck. Figure 2 illustrates these four modes involving one truck and one or two drones.
3.1. Synchronous Operation of Truck and Drone
The synchronous operation of truck and drone enables them to independently perform their main tasks along intersecting routes, facilitating spatio-temporal cooperation. As illustrated in Figure 2(a), the drone departs from the truck at a customer node or the depot, flies to other customer nodes, and returns to the truck for recharging or battery replacement in preparation for subsequent flights. Simultaneously, the truck serves other customer nodes synchronously but must reach intersection nodes before the battery depletes in order to retrieve the drone. Currently, only one paper [60] discusses this synchronous operational mode and considers scenarios where both truck and drone can patrol and scout target road segments while proposing an effective solution for arc routing problems encountered during truck-drone collaboration.
3.2. Independent Operation of Truck and Drone
The drone, although more flexible, has limitations in terms of endurance and payload capacity, which makes it challenging to cover all service areas. On the contrary, trucks have a stronger capacity but lower delivery efficiency. By combining these two vehicles, overall efficiency can be improved when working independently.
As depicted in Figure 2(b), the truck and the drone commence their missions from the base station, independently visiting customer nodes without intersecting each other’s routes. Subsequent studies extend this scenario to encompass parallel deliveries involving multiple trucks and drones [62,63,64]. Furthermore, some researchers suggest utilizing drones for supplementary delivery in specific scenarios where trucks face limitations. Lee et al. [41] propose a strategy wherein the truck delivers ordinary food while the drone simultaneously delivers perishable items to ensure high delivery efficiency. Besides, drones are also utilized for prompt response to dynamic customer demands, providing instant delivery services [35,38,65,66]. Additionally, Momeni et al. utilize drones to access different levels of tall buildings in order to reduce delivery time [67].
3.3. The Truck Serving as Auxiliary Support to the Drone
The limited capacity and endurance often hinder drones from independently completing tasks in long distances or complex environments in practical applications. To address this issue, some studies propose utilizing trucks as mobile base stations for drone takeoff and landing.
Figure 2(c) illustrates the target nodes that need to be visited by the drone and the parking nodes designated for the truck. On one hand, the drone is capable of accessing road-free areas or reaching high elevations of tall buildings [17,22,52,53,68]. On the other hand, by transporting the drone in close proximity to the target node, the truck can minimize its energy consumption during flight and extend its operational range [47,69]. Additionally, serving as a mobile base station, the truck can also replenish packages for the drone [30,54].
Besides, the payload of the drone usually remains fixed during reconnaissance and patrol missions. As a result, many studies allow the drone to visit multiple target nodes or arcs within a single flight route [50,61,70]. Moreover, in scenarios where parking nodes are limited, some researchers propose that the truck can wait while the drone performs its tasks [45,50,71,72,73,74]. Alternatively, certain strategies explore the possibility of multiple take-offs and landings at a single node by the drone [73,75].
3.4. The Drone Serving as Auxiliary Support to the Truck
The truck is deemed to be assisted by drones in two primary scenarios. The first scenario involves utilizing drones to provide replenishment support for the truck. As depicted in Figure 2(d), considering potential delays in customer deliveries [76] or the limited payload capacity of the truck [77], the truck can proactively deliver packages to certain customer nodes using drones. Similarly, Dayarian et al. address emerging customer demands during truck deliveries by utilizing drones for timely replenishment [39]. Another situation arises when the truck must adhere to a predetermined route and is considered as the primary vehicle due to its high priority [15,78]. In such cases, drones are utilized to visit customer nodes located outside of the fixed route.
4. Configurations of Trucks and Drones
The configurations of trucks and drones can be categorized into five types, as illustrated in Figure 3. For the sake of clarity, we denote the truck as T and the drone as D. These five types are: single truck and single drone (1T1D), single truck and multiple drones (1TmD), multiple combinations of single truck and single drone ((1T1D)), multiple combinations of single truck and multiple drones ((1TmD)), and finally, multiple trucks with multiple drones (mTnD).
4.1. Single Truck and Single Drone
The current research in the field of routing problem for cooperated trucks and drones primarily focuses on the single truck and single drone mode, which is considered as the basic scenario. Some researchers attempt to extend this routing problem from the traditional Traveling Salesman Problem (TSP). In line with the cooperative mode of trucks and drones, Murray and Chu propose a variant called the Flying Sidekick Traveling Salesman Problem (FSTSP), where one truck carries one drone starting from and returning to the depot after serving all customers [1]. The drone has flexibility to detach from the truck at any truck node, but it must return to another designated truck node after serving each customer. The optimization objective of FSTSP aims to minimize the total time required for serving all customers.
Meanwhile, Aagatz et al. introduce the Traveling Salesman Problem with Drone (TSP-D) [79]. Unlike the FSTSP problem, TSP-D emphasizes the auxiliary role of the drone: it is not allowed to make independent deliveries without utilizing the truck. Additionally, in TSP-D problem, the truck remains stationary and waits while the drone carries out deliveries. Building upon the assumptions of FSTSP problem, researchers define a variant of TSP-D problem aiming to minimize the operational cost of the entire delivery system and name it min-cost Traveling Salesman Problem with a drone (min-cost TSP-D) [80].
In addition to the challenges arising from the TSP problem, there are certain issues that stem from the specific characteristics of truck-drone mode routing. In this mode, the primary routing is established for trucks in the first stage, while secondary routing is assigned to drones in the second stage [45,70,81,82]. This type of problem is referred to as a two-stage routing problem.
Besides, considering the potential complexities in practical applications, researchers expand the 1T1D mode by taking into account various possibilities. For instance, they address challenges such as the multi-stage delivery problem [83] and inventory allocation problem [84], examine the impact of wind direction on drone energy consumption [85], explore strategies for supplying drones to trucks [76,77], investigate methods for automated retrieval of drones by trucks during travel [86], consider uncertainties in truck travel time due to urban traffic congestion [20], study electric vehicle recharging requirements along routes [87,88], and analyze options for charging drones on trucks [89].
4.2. Single Truck and Multiple Drones
The Parallel Drone Scheduling Traveling Salesman Problem (PDSTSP) is initially proposed by Murray et al. [1]. In this problem, a truck and multiple drones depart from the same delivery center and return to it after completing their respective delivery tasks. The two types of heterogeneous vehicles only cooperate at the task allocation level, with no overlapping nodes on their routes. To ensure the safe operation of drones, several studies impose constraints such as allowing drones to perform tasks only when the truck is stationary and preventing the truck from traveling to other nodes until all drones are retrieved at the current node [11,14,36,50,51,72,90,91,92,93].
The drones are required to land at an adjacent node after taking off from a truck node, which creates a similar situation [94]. However, the spatial cooperation between the truck and drones is compromised due to the restriction of taking off and landing at the same node. Nevertheless, this approach can still reduce delivery time compared to traditional ground vehicle methods [95].
Additionally, a limited number of studies involve fixed base stations for drones [96,97,98,99] or lockers in the delivery system [100]. In the initial stage, the truck visits all the base stations and provides packages that need to be delivered. In the subsequent stage, drones depart from their respective base stations to carry out delivery tasks before returning to their original locations.
Moshref et al. are the first to propose a mode in which multiple drones can take off and land interleaved on a single truck route, presenting a corresponding mixed integer linear programming model [101]. Besides, Murray and Raj focus on the scheduling problem of operation sequence when multiple drones take off and land at the same node, extending the original FSTSP problem to the Multiple Flying Sidekick Traveling Salesman Problem (mFSTSP) [102]. Subsequently, researchers consider various realistic factors impacting this problem, such as whether to allow drones to land and wait [103], multiple visits by drones [104], variable flight speed of drones [105], and replenishment capability for trucks by drones [106]. Similarly, some researchers extend the TSP-D problem to the Traveling salesman problem with multiple Drones (TSP-mD).
To fully leverage the potential of drones, several studies propose incorporating additional parking nodes [107,108,109,110] or enabling drones to take off from the truck en route [15,54,103,111]. Through theoretical analysis of the TSP-mD problem, Morandi et al. [112] demonstrate that allowing the truck to visit certain nodes repeatedly yields significant benefits in reducing overall delivery time.
4.3. Multiple Combinations of Single Truck and Single Drone
Through early exploration and verification of the truck-drone mode, researchers have begun to apply this mode on a larger scale scenario to consider the overall planning and optimization of multiple 1T1D systems. However, due to limitations in drone technology intelligence level and the need for operational stability, many researchers still focus on single drone carried by a single truck combination, primarily discussing task allocations and routing problems within these 1T1D systems. This problem is considered as the Vehicle Routing Problem with Drone (VRP-D). The VRP-D not only focuses on collaborative route optimization between trucks and drones within a system but also optimizes task allocation between different systems from an overall perspective.
The current research has already incorporated multiple truck and drone cooperative systems to collaboratively accomplish delivery or pick-up and delivery tasks [29,37,113,114,115,116,117,118,119,120,121]. Additionally, one study explores the cooperative delivery with multiple depots [122].
In addition, when the 1T1D mode fails to meet all customer requirements, effectively utilizing the (1T1D) mode for delivery has become a focal point of research [68,123,124,125,126,127,128,129,130]. Puglia et al. propose that drones can deposit packages at secure locations specified by customers during delivery to bypass time window constraints [12] . Furthermore, certain studies also consider time-varying factors such as varying truck speeds due to ground traffic congestion [26,131,132], or drone flight speed limitations imposed by weather conditions [133].
In the investigation of the (1T1D) mode, an increase in the quantity of trucks and drones can result in elevated maintenance and costs. Some studies concentrate on minimizing the overall operational cost, encompassing transportation cost, truck-use cost, parking cost, and other expenses [134], while others aim to optimize both the overall operational cost and completion time concurrently [68,125,135].
4.4. Multiple Combinations of Single Truck and Multiple Drones
The application scenario of the combinations of a single truck and multiple drones, denoted as (1TmD), has been explored by some researchers. Considering time windows, several studies impose restrictions on the truck to remain stationary while drones perform tasks [136,137], or constrain drones to take off and land at the same node [42,138].
4.5. Multiple Trucks and Multiple Drones
The multiple trucks and drones (mTnD) mode described in this section refers to the scenario where is allowed, which can be categorized into the following four scenarios:
The first scenario involves the extension of the PDSTSP problem, where multiple trucks and drones are concurrently executing tasks in parallel [34,35,40,62,63,64,65,66,67]. Essentially, this problem pertains to heterogeneous vehicle route planning with a focus on coordinating task allocation among different trucks or drones.
In the second scenario, the interdependence between trucks and drones is disregarded as the drone can opt for landing on other nearby trucks [139,140,141,142,143].
5. The Issues Have been Taken into Consideration
5.1. Objectives
The optimization objectives of the routing problem for cooperated trucks and drones can be primarily categorized into two domains, namely time-related and cost-related objectives, as illustrated in Figure 4.
5.1.1. Time-Related Objectives
In the process of collaborative operation between trucks and drones, the drone can perform tasks simultaneously with the truck to reduce the overall completion time. Murray and Chu is the first to propose the FSTSP problem to minimize total completion time [1]. Subsequent discussions on routing problems involving one truck and one or more drones also prioritize completion time as the optimization objective. These discussions include the FSTSP problem [147,148,149,150,151,152,153], the TSP-D problem [79,89,154,155,156,157,158,159,160,161,162], the mFSTSP problem [102,105,163,164,165] and the TSP-mD problem [104,108,166,167], etc.
Furthermore, in the context of multiple truck-drone cooperative systems, many studies opt to optimize the longest working time (or makespan) among all vehicles[114,133,168,169]. Additionally, some studies consider the completion time as the sum of working times for all truck-drone systems [125]. Moreover, certain studies designate the departure time of the truck as T0 and aim to minimize customers’ waiting time by reducing the duration from package delivery initiation until all customers receive their packages [92,101].
5.1.2. Cost-Related Objectives
The cost primarily encompasses transportation expenses, fixed truck costs, and operating costs. Specifically, the transportation cost of a truck is typically associated with the distance traveled, while the flight cost of a drone can be calculated based on its flight distance [23,170], flight time (including waiting time)[80], or energy consumption [82,171]. Additionally, some studies consider personnel costs in relation to the working time of truck-drone collaboration from an operational perspective [123]. Furthermore, certain studies treat personnel and maintenance costs as fixed expenses within the truck-drone cooperative system [123,128].
Furthermore, in order to enhance the collaboration between trucks and drones, researchers also incorporate a penalty cost for waiting time to incentivize personnel to work more efficiently and reduce overall costs [80,128,136]. Some studies consider other types of expenses. For instance, Zang et al. propose incorporating parking costs for trucks by allowing them to wait in designated parking lots [134]. Zou et al. introduce lockers into the problem and consider factors such as their location and operating costs [100]. Najy et al., on the other hand, combine the truck-drone mode with inventory routing problems and include warehouse storage costs [84].
5.1.3. Multiple Objectives
During the task execution process, bi-objective optimization problems have started to incorporate task efficiency and cost considerations [55,172,173,174]. Building upon this, Zhang et al. decompose the cost into completion time, energy consumption of trucks and drones, and operating cost determined by working time [175].
Besides, customer satisfaction is a crucial evaluation metric in the context of delivery. Several studies focus on enhancing customer satisfaction by minimizing waiting time for customers [124,176,177] or maximizing the coverage of served customers [29]. In the green routing problem, optimizing carbon emissions from trucks plays a significant role. Some researchers propose reducing truck utilization or increasing drone utilization to mitigate carbon emissions [8,9,135,178,179,180].
5.1.4. Other Objectives
In the field of logistics and delivery, researchers primarily focus on maximizing customer node revenue [15,74,181]. Conversely, research in reconnaissance backgrounds tends to prioritize maximizing coverage rates [48] or the information value of target nodes [46]. Similarly, when utilizing cooperated trucks and drones for traffic patrol purposes, minimizing accident probabilities is taken into consideration [57].
Besides, Van et al. consider both the total amount of supplies delivered and the number of nodes visited [34], while Lu et al. aim to balance supply delivery by minimizing the difference in satisfaction rates among demand nodes [133]. When conducting combat missions, Yan et al. opt to minimize equipment damage costs and penalties for unperformed tasks to mitigate vehicle risk [49], whereas Cheng et al. propose maximizing drone retrieval probability in a similar scenario [182].
5.2. Constraints
The constraints associated with time windows in customer nodes, drone performance, and operations are illustrated in Figure 5.
5.2.1. Constraint of Time Windows in Customer Nodes
(1) Consideration of time windows when truck and drone are working independently
Based on the PDSTSP problem, Ham is the first to propose the routing problem for pick-up and delivery with considering the time windows in customer nodes [65]. Subsequently, Sawadsitang et al. and Van et al. investigate uncertainty factors in the delivery process under the independent operation mode of trucks and drones [34,66].
(2) Consideration of time windows in two-stage delivery
The truck is often required to remain stationary while the drone operates, leading to a collaborative routing problem known as two-stage delivery [136,145,181,183]. Additionally, Chen et al. propose using delivery robots as an alternative to drones [137], where multiple robots can be deployed for simultaneous deliveries once the truck has stopped and can only resume travel after these robots have completed their tasks and returned. Furthermore, Cao et al. introduce the concept of a drone base station [176], where the truck drops off packages along its route for parallel delivery by the drone. It should be noted that the timing of the truck’s visit to the drone base station must ensure that the drone can provide services within the customer-specified time window.
(3) Consideration of soft time windows when truck and drone are working synchronously
The time window constraints in the current VRPTW problem can be categorized into two types: soft time windows and hard time windows. In problems related to soft time windows, customers are allowed a certain degree of deviation from their desired service time window, but they usually incur corresponding penalty costs. Researchers typically determine the penalty function coefficient based on the priority of different customers. Das et al. construct a MILP model for this problem and apply NSGA-II to solve the counterpart Multi-objective optimization problem [124].
(4) Consideration of hard time windows when truck and drone are working synchronously
During the synchronous movement, not only should we consider the spatio-temporal cooperation of the two vehicles, but also take into account the additional requirements imposed by hard time windows on route planning from a temporal perspective. This further increases the complexity and difficulty of solving the problem. Some studies relax the constraint of hard time windows. For instance, Puglia et al. propose that packages can be placed in a designated safe location during drone delivery, allowing us to ignore time windows on drone routes [12]. To enable contact-free delivery during epidemic periods, Zhang and Li suggest that customers can collect their packages from lockers, thus loosening the service time constraint [130]. Moreover, some studies adjust the mode of truck-drone collaboration, for example, Luo et al. propose that drones can land and wait without considering energy consumption while waiting [177,184]. Additionally, to ensure safe operation of drones, researchers restrict drones to be retrieved at the next truck node after leaving their current truck node [42,126,185]. Furthermore, Xing et al. not only consider time windows but also analyze how travel times in different periods affect delivery efficiency [132]. Kim et al. present a flexible collaborative strategy where drones can land on other trucks for more efficient delivery [143]. It is worth noting that most previous studies assume that drones carry at most one package per flight. However, a small number of researches consider scenarios where drones visit multiple nodes in a single flight [127,129,186]. For example, The study conducted by Amine et al. overlooks the pairing relationship between the drone and truck, yet permits the drone to land on other nearby trucks subsequent to completing the delivery [141].
5.2.2. Constraints of Drone Performance
(1) Multi-visit of the drone
In the reconnaissance mission, research in this field primarily focuses on the multiple visits of the drone, as its payload remains constant throughout the flight [46,48,69,70]. In the domain of logistics and delivery, considering the drone’s ability to support multiple customer nodes in a single flight due to its payload capacity and endurance, achieving multiple visits by drones is anticipated for enhancing overall delivery efficiency while leveraging their advantages in terms of operational cost and delivery speed.
(2) The impact of drone’s payload on energy consumption
In an actual delivery scenario, the drone is typically fully loaded before departure and empty-loaded upon completion of the delivery when returning to the truck. It is generally assumed that the energy consumption of the drone positively correlates with both flight time and payload during a single visit by the drone [15,71,89,187]. The energy consumption of the drone during a flight can be divided into two stages: firstly, when flying to the customer node while providing delivery service under maximum payload conditions, and secondly, when returning to the landing node without any load and waiting for retrieval by the truck. Building upon this assumption, Raj and Murray extend their analysis on how drone speed impacts energy consumption [105], while Pugliese et al. consider weather factors’ influence on drone energy consumption [13].
5.2.3. Constraints of Drone’s Operation
To ensure efficient collaboration between vehicles, numerous studies impose restrictions on trucks, requiring them to depart from the current node and maintain synchronization with the drone after releasing it. Additionally, some propose that the truck should wait for the drone at a designated location or allow for automatic takeoff and landing of the drone while the truck is in transit.
(1) The truck waits for the drone in place
As depicted in Figure 6(a), the drone’s ability to fly from node 4 to node 5 and return to the base station may be compromised if it is required to take off and land at the same node. In such cases, arranging for a truck to serve node 5 becomes necessary, leading to potential increases in delivery time and cost. Consequently, some researchers propose a mode where the truck remains stationary during the drone’s delivery [71,134,188,189]..
Moreover, Moshref et al. propose three distinct operational modes: stationary truck with flying drone, moving truck with flying drone, and a hybrid mode that combines both aforementioned modes [101]. The experimental results demonstrate that the hybrid mode exhibits the highest delivery efficiency and can reduce customer waiting time by over 60% compared to traditional truck delivery methods. Additionally, Coindreau et al. [123] impose a constraint on not allowing the truck to launch and retrieve multiple drones at the same location, while some researchers permit multi-trip capabilities for drones at a single node [97,115].
(2) The drone takes off and lands on the truck route
As illustrated in Figure 6(b), during the truck’s traversal of the road network, the drone can autonomously navigate to residential areas for package deliveries [33,103]. This collaborative mode not only expands the drone’s service coverage [15,86], but also enhances operational efficiency between vehicles [186]. Researchers design various strategies to achieve this efficient collaborative delivery approach. For instance, Schermer et al. propose a two-stage strategy where the truck route is initially constructed and subsequently synchronized with drone routes [114]. Masone et al. discretize the road network to establish collaborative routes between these vehicle types [190] . Additionally, Thomas et al. first cluster customer nodes and then construct collaborative routes within each cluster [191].
5.3. Dynamic Issues
More and more researchers begin to consider the routing challenges associated with truck-drone systems in dynamic environments. For instance, Sawadsitang et al. present a framework called Joint Ground and Aerial Delivery Service Optimization and Planning (GADOP), which formulates the problem as a three-stage stochastic integer programming model that accounts for uncertainty in drone package delivery [66]. Yan et al. propose incorporating task abortion when routes of trucks and drone clusters are subjected to random attacks, aiming to minimize the expected total cost of unvisited targets considering potential destruction of trucks and drones [49]. Long et al. introduce a dynamic truck-drone collaboration strategy for efficient and resilient urban emergency response, with the objective of minimizing total service delay and response completion time [32]. Additionally, Liu et al. consider the impact of traffic congestion or adverse weather conditions on truck speed, extending the FSTSP problem by formulating it into a Markov Decision Process (MDP) [20].
In addition, Ramos et al. analyze the utilization of drones for medicine delivery and formulate the problem as the Dynamic Parallel Drone Scheduling Vehicle Routing Problem with Lead-Time [35]. Chen et al. investigate same-day delivery using trucks and drones, proposing a deep Q-learning approach to determine whether a new customer should be assigned to drones or trucks, or if no service should be offered at all [38]. Dayarian et al. introduce a same-day home delivery system where trucks are replenished by drones whenever they remain stationary and allow drone landing [39].
6. Solution Methodologies
The methodologies to solve the routing problems of cooperated trucks and drones can be primarily classified into four categories: the exact algorithms, the heuristic algorithms, the metaheuristic algorithms, and other algorithms. The distribution of each methodology used in current research is illustrated in Figure 7.
6.1. The Exact Algorithms
The common modeling approaches for routing problems involving cooperated trucks and drones include Mixed Integer Linear Programming (MILP), Mixed Integer Programming (MIP), Integer Programming (IP) and other models. Figure 8 illustrates the utilization of these different models.
The majority of MILP models typically utilize binary decision variables to represent the visitation status of nodes and edges, as well as the mode of visitation. On the other hand, constant decision variables are utilized to depict variations in time, energy consumption, payload, and other unchanging states along the route. The typical problems include the FSTSP problem [163,192,193,193,194], the mFSTSP problem [102], the TSP-D problem [80,160,195], the TSP-mDproblem[99,104,167,196], the VRP-D problem [114,123,129], the VRP-mD problem [125,137,168,197,198], the PDSTSP problem [62,63,64,199], etc., and the aforementioned problems can all be effectively solved by model solvers such as CPLEX and Gurobi. In order to enhance solving efficiency, various branch strategies have been proposed by researchers. such as the branch and cut algorithm [125,163,167,193,194,195,196,200,201], the branch and bound algorithm [156], the branch and price algorithm [202], the branch and price and cut algorithm [129,171,203,204], etc. Besides, the dynamic programming algorithm is also applied to solve these problems [77,154,160,205].
When adding additional constraints, such as the multi-visit of the drone [10,54,55,206,207], the impact of the drone’s payload on energy consumption [71,187,208], the takeoff and landing of the drone on truck route [33,53,103] or the customer time windows [126,132,186], several studies formulate the MIP model. For example, Dukkanci et al. [71] utilize second-order conic programming to linearize a nonlinear model. Additionally, some researchers utilize valid inequalities [159] or the cutting plane algorithm [84,171] to reduce solution space for finding optimal solutions. Moreover, Benders decomposition algorithm is adopted by Kang et al. and Vasquez et al. to decompose problems into main and subproblems in advance [93,161], while Mbiadou et al. decompose the problems into multiple stages using dynamic programming method [62].
The current IP model mainly encompasses two scenarios: firstly, the drone’s route is simplified as a sequence of truck nodes for takeoff, intermediate drone nodes, and a truck node for landing when the drone is restricted to visiting only one node in a single flight [1,15,28,79,150]. Secondly, the feasibility of the drone route is determined by its flight distance, with the route being limited by the longest flight time of the drone [70]. Moreover, these situations require binary decision variables exclusively in their models. To solve this model, researchers utilize methodologies such as branch and price algorithm [140] and column generation method [150].
Additionally, a limited number of studies explore the Set Covering/Packing model. Among them, Yang et al. utilize the branch and price method to address this problem [108,183,197]. Liu et al. develop a mathematical model based on route sets and designed a branch-based enumeration algorithm for it [82]. Similarly, Mara et al. consider drone routes as sets and construct a subset-based mathematical programming model [164].
6.2. The Heuristic Algorithms
The first type of heuristic algorithm is based on the principle of "the truck before the drone". It begins by constructing an initial truck route to visit all target nodes, and then applies rule-based strategies, such as the maxSavings strategy [1,61,80,148] and the greedy strategy [79,139] to replace some truck nodes with drone nodes. These strategies also encompass exact solutions for subproblems including the dynamic programming method [28,79], branch and bound method [152] and labeling algorithm [46]. Additionally, researchers utilize search algorithms [117,190] to optimize subproblem solutions which have been successfully applied in solving the VRP-D problems as well [10,143].
The second type of heuristic algorithm is based on the principle of "the drone before the truck" [52,61,70,81,108]. A route for the drone to visit all target nodes is initially constructed and then incorporates takeoff and landing truck nodes based on endurance and payload constraints. For instance, Kundu et al. utilize the Shortest Path Problem (SPP) to determine the placement of takeoff and landing nodes [153]. Furthermore, a similar concept is applied in solving two-stage routing problems [91,97,134]: multiple drone routes covering all target nodes are first established considering optional truck parking nodes, followed by the construction of the truck route according to selected landing and takeoff locations for drones in order to determine their corresponding sequence.
The third type of heuristic algorithm focuses on the strategy of "truck-drone cooperation" and constructs the truck route for visiting a subset of nodes in the initial stage. During this stage, certain papers identify nodes that can only be accessed by the truck based on constraints such as drone payload, and establish the shortest route for the truck to cover these nodes. The remaining nodes are then inserted into either the truck route or drone routes [12,50]. Moreover, some studies approach decision-making regarding visiting modes for target nodes from a task allocation perspective, subsequently constructing drone routes based on partial construction of the truck route [102,105,155,168,209,210]. Additionally, iterative solution methods are utilized by some researchers to optimize the problem in stages [31,152,155,211].
6.3. The Metaheuristic Algorithms
The metaheuristic algorithm can be classified into five distinct categories, namely neighborhood search, evolution, swarm intelligence, physics, and human behavior. Figure 9 illustrates the distribution of the categories and the algorithms associated with each category.
(1) Metaheuristic algorithm based on neighborhood search
The Adaptive Large Neighborhood Search (ALNS) algorithm and the Variable Neighborhood Search (VNS) algorithm are the two most extensively utilized among neighborhood search algorithms.
By utilizing the VNS algorithm, the solution space is dynamically explored through the adaptive selection of diverse destroy and repair algorithms, while adjusting the selection probability of operators based on search process outcomes. The destroy and repair operators encompass random deletion, worst deletion, route deletion, greedy insertion, regret insertion and nearest insertion are commonly utilized [19,24,42,43,113,120,137,142,144,164,186,212]. Furthermore, some researchers integrate GA into the adaptive framework of ALNS to comprehensively explore the solution space [213].
By utilizing the Variable Neighborhood Search (VNS) algorithm, an improved solution can be obtained by applying a predefined set of neighborhood operations in different local search spaces around the current solution. The neighborhood operations including 2-opt, two-swap and relocation are commonly utilized[73,147,149,169,214,215,216]. Due to its effectiveness in finding local optima solutions, some researchers have combined VNS with the simulated annealing algorithm to escape from local optima by accepting suboptimal solutions based on certain acceptance criteria within the simulated annealing framework [60,109].
Besides, some researchers utilize the Local Search (LS) and the Iterative Local Search (ILS) based on heuristic algorithms. In studies considering ILS [61,67,69], an initial solution is generated using a constructed heuristic algorithm. Furthermore, the neighborhoods of the current solution are explored to enhance solution quality, while a disturbance factor is incorporated into the ILS algorithm to escape local optima during the search process [31,44,62,99,118,131,197,207]. Additionally, some researchers apply ILS algorithm to multi-objective problems and design a Pareto neighborhood search algorithm [177].
The Greedy Randomized Adaptive Search Procedure (GRASP) algorithm, unlike the ILS algorithm, is capable of generating a new feasible solution at the initial stage of each neighborhood search and exploring the current solution’s neighborhood by using the LS algorithm [80,107,145,217,218].
Furthermore, some studies consider alternative local search algorithms such as large neighborhood search [10,59], destroy and reconstruct methods [63], and set-based neighborhood search algorithms following clustering [219]. These heuristic algorithms based on search criterion enable efficient exploration within the solution space from various perspectives to obtain higher quality solutions quickly.
(2) Metaheuristic algorithm based on evolution
The metaheuristic algorithm based on evolution emulates the biological process of natural selection, generating offspring solutions through genetic and mutation operations on the basis of parent solutions, and selecting superior solutions as parents for subsequent iterations.
The Genetic Algorithm (GA) is widely recognized as the most commonly utilized evolutionary algorithm in various domains, including optimization problems related to truck-drone collaboration [8,41,100,103,165,220,221]. In GA applications, researchers typically adopt a specific encoding scheme to represent solutions and utilize genetic operations such as selection, crossover, and mutation to explore the solution space. To account for the presence of two types of routes involved in truck-drone collaboration scenarios, some studies incorporate route segments of drones carried by trucks into the coding of drone routes. This approach enables recording multiple take-offs and landings as part of a complete route [133,158]. Furthermore, apart from traditional chromosome encoding methods, matrix-based encodings have also been utilized in certain investigations [184].
For multi-objective optimization problems, the Non-dominated Sorting Genetic Algorithm-II (NSGA-II) [130,135,173,175] is commonly utilized. The NSGA-II algorithm incorporates crowding-distance calculation and non-dominated sorting mechanisms based on GA to achieve a smoother Pareto front during the search process. To further enhance the local search capability of evolutionary algorithms, some studies utilize the Memetic Algorithm (MA) [88,110], which combines crossover operators with local search to diversify solutions and improve algorithm’s ability for local optimization. Additionally, Blanco et al. propose a multi-agent-based evolutionary algorithm where multiple solutions undergo mutation and genetic operations simultaneously from different directions, leading to an integrated information approach that yields superior solutions [106] .
(3) Metaheuristic algorithms based on swarm intelligence
The principle of the metaheuristic algorithm based on swarm intelligence is to explore for optimal solutions by emulating the behavioral strategies observed in natural swarms. Currently, three main swarm intelligence algorithms are widely applied. Firstly, the Ant Colony Optimization (ACO) algorithm simulates ants’ path selection and pheromone updating mechanisms during foraging. It marks and transmits high-quality paths as pheromones to guide subsequent search processes towards better directions [27,36,37,115,122,124]. Secondly, the Particle Swarm Optimization (PSO) algorithm learns from birds’ foraging behavior: a group of evenly distributed particles initializes within the solution space, and their velocities and positions are updated based on individual and group best positions in history to achieve comprehensive exploration and local fine search within the solution space [103,111]. Lastly, the Artificial Bee Colony (ABC) algorithm simulates bees’ division of labor, cooperation, and information-sharing mechanisms during honey collection [68,116,176].
(4) Metaheuristic algorithm based on physics
The Simulated Annealing (SA) algorithm is currently the most widely used physics-based metaheuristic algorithm in solving optimization problems [82,101,141,179,192,222]. By simulating the physical annealing process, this algorithm effectively escapes local optima and discovers global optimal solutions. Furthermore, some studies incorporate the Metropolis criterion into simulated annealing to enhance search diversity [30,109,113].
(5) Metaheuristic algorithms based on human behavior
The Tabu Search (TS) algorithm is rooted in human behavior, utilizing a tabu list to prevent revisiting previously explored solutions. By maintaining and updating this list, it effectively avoids redundant searches and enhances search efficiency [30,32,45,50,92,104]. Similar to the SA algorithm, the TS algorithm has also been integrated into other algorithms to create more efficient and accurate hybrid approaches [114,162].
6.4. Other Algorithms
Numerous studies have utilized approximate estimation algorithms and machine learning algorithms to address the routing problem for cooperative trucks and drones. For instance, Carlsson and Song demonstrate, through theoretical analysis, that delivery efficiency is directly proportional to the square root of the speed ratio between trucks and drones [223]. Canca et al. utilize a continuous approximation method to tackle the delivery problem in large areas involving cooperated trucks and drones [224]. In recent years, there has been an increasing focus on machine learning algorithms. Liu et al. consider the impact of road traffic congestion on delivery efficiency and utilize a deep reinforcement learning algorithm to predict traffic conditions within the road network [20]. Chen et al. utilize a reinforcement learning algorithm to determine optimal service modes for new customer nodes, enabling rapid response to customer needs [38].
For two-stage delivery problems, some studies apply K-means clustering algorithm for customer node clustering while utilizing reinforcement learning methods separately for constructing truck and drone routes [14,225]. Additionally, certain studies design graph network models based on machine learning techniques by encoding truck-drone cooperative routes into highly connected graph structures, leveraging the topological structure of graphs for solution optimization in complex environments (Wang et al., 2023; Bogyrbayeva et al., 2023; Kong et al., 2023).
7. Conclusions
This paper systematically analyzes and reviews over 200 research articles pertaining to the routing problem involving collaborated trucks and drones from 2015 to 2024. We categorize the application background, specify four categories for the truck-drone collaboration modes, summarize the existing configurations of trucks and drones utilized in current literature, classify the involved problems and provide a summary of existing solution methodologies.
Despite progress, there are still some limitations: firstly, existing research insufficiently addresses customer time window and truck-drone collaboration constraints, hindering practical application. Secondly, overlooking drone performance constraints complicates real-world implementation. Lastly, advancing research necessitates more precise models and algorithms for effective solutions in complex scenarios.
Additionally, we propose several potential directions for further research: Firstly, from the perspective of model construction and algorithm design, developing flexible and practical mathematical models is crucial for improving and innovating existing algorithms, thus enhancing the coordination efficiency between trucks and drones in complex environments. Meanwhile, considering multiple optimization objectives such as truck and drone routing distance, energy consumption, and task completion time, finding the optimal solution can be achieved through multi-objective optimization algorithms. Furthermore, future research should focus on exploring realistic solutions under time window constraints, as time windows are critical factors in delivery services. Besides, researchers can delve into the actual performance limitations of drones and develop more feasible methods, such as considering multiple visiting nodes and the impact of payload on energy consumption during delivery. Secondly, attention should be given to dynamic environment adaptability, studying how to achieve efficient collaborative route planning in dynamic environments. This includes developing algorithms that can update routes in real-time to respond to dynamic obstacles and unforeseen events in the environment, as well as researching adaptive planning strategies that allow trucks and drones to dynamically adjust their routes based on environmental changes. Lastly, from an environmental perspective, future research can expand the collaboration modes between drones and engine-fueled vehicles, including electric vehicles, to reduce pollution emissions.
Author Contributions
Conceptualization, Shuo Dang and Yao Liu; methodology, Shuo Dang and Yao Liu; software, Shuo Dang; validation, Yao Liu; formal analysis, Shuo Dang and Yao Liu; investigation, Shuo Dang; resources, Yao Liu; data curation, Yao Liu; writing - original draft preparation, Shuo Dang; writing - review and editing, Yao Liu; visualization, Shuo Dang; supervision, Zhong Liu; project administration, Zhong Liu and Jianmai Shi; funding acquisition, Jianmai Shi and Zhihao Luo
Funding
This research was funded by the National Natural Science Foundation of China grant number 72271241. This research was funded by the National Natural Science Foundation of China grant number 72301290.
Acknowledgments
The authors would like to thank the editor and anonymous reviewers whose comments have helped to improve and clarify this manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C. A Survey of Recent Extended Variants of the Traveling Salesman and Vehicle Routing Problems for Unmanned Aerial Vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Computers & Operations Research 2020, 123, 105004. [Google Scholar] [CrossRef]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transportation Research Part C: Emerging Technologies 2020, 120, 102762. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. European Journal of Operational Research 2021, 294, 1078–1095. [Google Scholar] [CrossRef]
- Jazemi, R.; Alidadiani, E.; Ahn, K.; Jang, J. A review of literature on vehicle routing problems of last-mile delivery in urban areas. Applied Sciences-Basel 2023, 13. [Google Scholar] [CrossRef]
- Baldisseri, A.; Siragusa, C.; Seghezzi, A.; Mangiaracina, R.; Tumino, A. Truck-based drone delivery system: An economic and environmental assessment. Transportation Research Part D: Transport and Environment 2022, 107, 103296. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Applied Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Banyai, T. Impact of the Integration of First-Mile and Last-Mile Drone-Based Operations from Trucks on Energy Efficiency and the Environment. Drones 2022, 6. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Min, B.C.; Lee, S. Two echelon vehicle routing problem with drones in last mile delivery. International Journal of Production Economics 2020, 225, 107598. [Google Scholar] [CrossRef]
- Salama, M.; Srinivas, S. Joint optimization of customer location clustering and drone-based routing for last-mile deliveries. Transportation Research Part C: Emerging Technologies 2020, 114, 620–642. [Google Scholar] [CrossRef]
- Di Puglia Pugliese, L.; Macrina, G.; Guerriero, F. Trucks and drones cooperation in the last-mile delivery process. Networks 2021, 78, 371–399. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Guerriero, F.; Scutella, M.G. The Last-Mile Delivery Process with Trucks and Drones Under Uncertain Energy Consumption. Journal of Optimization Theory and Applications 2021, 191, 31–67. [Google Scholar] [CrossRef]
- Arishi, A.; Krishnan, K.; Arishi, M. Machine learning approach for truck-drones based last-mile delivery in the era of industry 4.0. Engineering Applications of Artificial Intelligence 2022, 116. [Google Scholar] [CrossRef]
- Betti Sorbelli, F.; Corò, F.; Das, S.K.; Palazzetti, L.; Pinotti, C.M. On the Scheduling of Conflictual Deliveries in a last-mile delivery scenario with truck-carried drones. Pervasive and Mobile Computing 2022, 87, 101700. [Google Scholar] [CrossRef]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The Use of Drones for Last-Mile Delivery: A Numerical Case Study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Gao, J.; Zhen, L.; Laporte, G.; He, X. Scheduling trucks and drones for cooperative deliveries. Transportation Research Part E: Logistics and Transportation Review 2023, 178, 103267. [Google Scholar] [CrossRef]
- Imran, N.M.; Mishra, S.; Won, M. A-VRPD: Automating Drone-Based Last-Mile Delivery Using Self-Driving Cars. IEEE Transactions on Intelligent Transportation Systems 2023, 24, 9599–9612. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, X.; Li, G.; Dong, Z.; Xiao, N.; Zhao, A. Robust traveling salesman problem with multiple drones: Parcel delivery under uncertain navigation environments. Transportation Research Part E: Logistics and Transportation Review 2022, 168, 102967. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X.; Khojandi, A. The flying sidekick traveling salesman problem with stochastic travel time: A reinforcement learning approach. Transportation Research Part E: Logistics and Transportation Review 2022, 164, 102816. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, X.; Dong, Z.; Xiao, N.; Zhao, A. Robust traveling salesman problem with drone: balancing risk and makespan in contactless delivery. International Transactions in Operational Research 2024, 31, 167–191. [Google Scholar] [CrossRef]
- Weng, Y.Y.; Wu, R.Y.; Zheng, Y.J. Cooperative truck-drone delivery path optimization under urban traffic restriction. Drones 2023, 7. [Google Scholar] [CrossRef]
- Liu, W.; Li, W.; Zhou, Q.; Die, Q.; Yang, Y. The optimization of the "UAV-vehicle" joint delivery route considering mountainous cities. Plos One 2022, 17, e0265518. [Google Scholar] [CrossRef] [PubMed]
- Xiao, J.; Li, Y.; Cao, Z.; Xiao, J. Cooperative trucks and drones for rural last-mile delivery with steep roads. Computers & Industrial Engineering 2024, 187. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: several worst-case results. Optimization Letters 2017, 11, 679–697. [Google Scholar] [CrossRef]
- Yin, Y.; Yang, Y.; Yu, Y.; Wang, D.; Cheng, T. Robust vehicle routing with drones under uncertain demands and truck travel times in humanitarian logistics. Transportation Research Part B: Methodological 2023, 174, 102781. [Google Scholar] [CrossRef]
- Bansal, S.; Goel, R.; Maini, R. Ground vehicle and UAV collaborative routing and scheduling for humanitarian logistics using random walk based ant colony optimization. Scientia Iranica 2022, 29, 632–644. [Google Scholar]
- Zhang, L.; Ding, Y.; Lin, H. Optimizing synchronized truck-drone delivery with priority in disaster relief. Journal of Industrial and Management Optimization 2023, 19, 5143–5162. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, C.; Yang, J. A multi-objective humanitarian pickup and delivery vehicle routing problem with drones. Annals of Operations Research 2022, 319, 291–353. [Google Scholar] [CrossRef]
- Manshadian, H.; Sadegh Amalnick, M.; Torabi, S.A. Synchronized truck and drone routing under disastrous conditions (case study: Urban thoroughfares disinfection). Computers & Operations Research 2023, 159, 106295. [Google Scholar] [CrossRef]
- Gao, W.; Luo, J.; Zhang, W.; Yuan, W.; Liao, Z. Commanding Cooperative UGV-UAV With Nested Vehicle Routing for Emergency Resource Delivery. IEEE Access 2020, 8, 215691–215704. [Google Scholar] [CrossRef]
- Long, Y.; Xu, G.; Zhao, J.; Xie, B.; Fang, M. Dynamic Truck–UAV Collaboration and Integrated Route Planning for Resilient Urban Emergency Response. IEEE Transactions on Engineering Management 2023, 1–13. [Google Scholar] [CrossRef]
- Lin, M.; Chen, Y.; Han, R.; Chen, Y. Discrete Optimization on Truck-Drone Collaborative Transportation System for Delivering Medical Resources. Discrete Dynamics in Nature and Society 2022, 2022. [Google Scholar] [CrossRef]
- Van Steenbergen, R.; Mes, M.; Van Heeswijk, W. Reinforcement learning for humanitarian relief distribution with trucks and UAVs under travel time uncertainty. Transportation Research Part C: Emerging Technologies 2023, 157, 104401. [Google Scholar] [CrossRef]
- Ramos, T.R.P.; Vigo, D. A new hybrid distribution paradigm: Integrating drones in medicines delivery. Expert Systems with Applications 2023, 234. [Google Scholar] [CrossRef]
- Deng, X.; Guan, M.; Ma, Y.; Yang, X.; Xiang, T. Vehicle-Assisted UAV Delivery Scheme Considering Energy Consumption for Instant Delivery. Sensors 2022, 22, 2045. [Google Scholar] [CrossRef]
- Gu, Q.; Fan, T.; Pan, F.; Zhang, C. A vehicle-UAV operation scheme for instant delivery. Computers & Industrial Engineering 2020, 149. [Google Scholar] [CrossRef]
- Chen, X.; Ulmer, M.W.; Thomas, B.W. Deep Q-learning for same-day delivery with vehicles and drones. European Journal of Operational Research 2022, 298, 939–952. [Google Scholar] [CrossRef]
- Dayarian, I.; Savelsbergh, M.; Clarke, J.P. Same-Day Delivery with Drone Resupply. Transportation Science 2020, 54, 229–249. [Google Scholar] [CrossRef]
- Ulmer, M.W.; Thomas, B.W. Same-day delivery with heterogeneous fleets of drones and vehicles. Networks 2018, 72, 475–505. [Google Scholar] [CrossRef]
- Lee, S.Y.; Han, S.R.; Song, B.D. Simultaneous cooperation of Refrigerated Ground Vehicle (RGV) and Unmanned Aerial Vehicle (UAV) for rapid delivery with perishable food. Applied Mathematical Modelling 2022, 106, 844–866. [Google Scholar] [CrossRef]
- Yan, R.; Zhu, X.; Zhu, X.; Peng, R. Optimal routes and aborting strategies of trucks and drones under random attacks. Reliability Engineering & System Safety 2022, 222, 108457. [Google Scholar] [CrossRef]
- Zandieh, F.; Farid Ghannadpour, S.; Mahdavi Mazdeh, M. Integrated ground vehicle and drone routing with simultaneous surveillance coverage for evading intentional disruption. Transportation Research Part E: Logistics and Transportation Review 2023, 178, 103266. [Google Scholar] [CrossRef]
- Zandieh, F.; Ghannadpour, S.F.; Mazdeh, M.M. New integrated routing and surveillance model with drones and charging station considerations. European Journal of Operational Research 2024, 313, 527–547. [Google Scholar] [CrossRef]
- Redi, A.A.N.P.; Sopha, B.M.; Asih, A.M.S.; Liperda, R.I. Collaborative Hybrid Aerial and Ground Vehicle Routing for Post-Disaster Assessment. Sustainability 2021, 13. [Google Scholar] [CrossRef]
- Zhang, G.; Zhu, N.; Ma, S.; Xia, J. Humanitarian relief network assessment using collaborative truck-and-drone system. Transportation Research Part E: Logistics and Transportation Review 2021, 152. [Google Scholar] [CrossRef]
- Ribeiro, R.G.; Cota, L.P.; Euzebio, T.A.M.; Ramirez, J.A.; Guimaraes, F.G. Unmanned-Aerial-Vehicle Routing Problem With Mobile Charging Stations for Assisting Search and Rescue Missions in Postdisaster Scenarios. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2022, 52, 6682–6696. [Google Scholar] [CrossRef]
- Ermagun, A.; Tajik, N. Multiple-Drones-Multiple-Trucks Routing Problem for Disruption Assessment. Transportation Research Record 2023, 2677, 725–740. [Google Scholar] [CrossRef]
- Yan, R.; Zhu, X.; Zhu, X.; Peng, R. Joint optimisation of task abortions and routes of truck-and-drone systems under random attacks. Reliability Engineering & System Safety 2023, 235. [Google Scholar] [CrossRef]
- Hu, M.; Liu, W.; Lu, J.; Fu, R.; Peng, K.; Ma, X.; Liu, J. On the joint design of routing and scheduling for Vehicle-Assisted Multi-UAV inspection. Future Generation Computer Systems 2019, 94, 214–223. [Google Scholar] [CrossRef]
- Hu, M.; Liu, W.; Peng, K.; Ma, X.; Cheng, W.; Liu, J.; Li, B. Joint Routing and Scheduling for Vehicle-Assisted Multi-drone Surveillance. IEEE Internet of Things Journal 2019, 6, 1781–1790. [Google Scholar] [CrossRef]
- Maini, P.; Sundar, K.; Singh, M.; Rathinam, S.; Sujit, P.B. Cooperative Aerial–Ground Vehicle Route Planning With Fuel Constraints for Coverage Applications. IEEE Transactions on Aerospace and Electronic Systems 2019, 55, 3016–3028. [Google Scholar] [CrossRef]
- Amorosi, L.; Puerto, J.; Valverde, C. Coordinating drones with mothership vehicles: The mothership and drone routing problem with graphs. Computers & Operations Research 2021, 136. [Google Scholar] [CrossRef]
- Alkaabneh, F. Matheuristic for synchronized vehicle routing problem with multiple constraints and variable service time: Managing a fleet of sprayers and a tender tanker. Computers & Operations Research 2024, 162. [Google Scholar] [CrossRef]
- Momeni, M.; Soleimani, H.; Shahparvari, S.; Afshar-Nadjafi, B. Coordinated routing system for fire detection by patrolling trucks with drones. International Journal of Disaster Risk Reduction 2022, 73, 102859. [Google Scholar] [CrossRef]
- Luo, H.; Zhang, P.; Wang, J.; Wang, G.; Meng, F. Traffic Patrolling Routing Problem with Drones in an Urban Road System. Sensors 2019, 19. [Google Scholar] [CrossRef]
- Rosenfeld, A.; Maksimov, O. Optimal cruiser-drone traffic enforcement under energy limitation. Artificial Intelligence 2019, 277, 103166. [Google Scholar] [CrossRef]
- Liu, B.; Ni, W.; Liu, R.P.; Zhu, Q.; Guo, Y.J.; Zhu, H. Novel Integrated Framework of Unmanned Aerial Vehicle and Road Traffic for Energy-Efficient Delay-Sensitive Delivery. IEEE Transactions on Intelligent Transportation Systems 2022, 23, 10692–10707. [Google Scholar] [CrossRef]
- Tian, S.; Chen, H.; Wu, G.; Cheng, J. Asymmetric Arc Routing by Coordinating a Truck and Multiple Drones. Sensors 2022, 22. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, K.; Luo, Q.; Wu, G.; Pedrycz, W. A GV-drone arc routing approach for urban traffic patrol by coordinating a ground vehicle and multiple drones. Swarm and Evolutionary Computation 2023, 77, 101246. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, J.; Liu, Z.; Huang, J.; Zhou, T. Two-Layer Routing for High-Voltage Powerline Inspection by Cooperated Ground Vehicle and Drone. Energies 2019, 12, 1385. [Google Scholar] [CrossRef]
- Mbiadou Saleu, R.G.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The parallel drone scheduling problem with multiple drones and vehicles. European Journal of Operational Research 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Nguyen, M.A.; Dang, G.T.H.; Ha, M.H.; Pham, M.T. The min-cost parallel drone scheduling vehicle routing problem. European Journal of Operational Research 2022, 299, 910–930. [Google Scholar] [CrossRef]
- Montemanni, R.; Dell’Amico, M.; Corsini, A. Parallel drone scheduling vehicle routing problems with collective drones. Computers & Operations Research 2024, 163. [Google Scholar] [CrossRef]
- Ham, A.M. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming. Transportation Research Part C: Emerging Technologies 2018, 91, 1–14. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P. Joint Ground and Aerial Package Delivery Services: A Stochastic Optimization Approach. IEEE Transactions on Intelligent Transportation Systems 2019, 20, 2241–2254. [Google Scholar] [CrossRef]
- Momeni, M.; Al-e-Hashem, S.M.J.M.; Heidari, A. A new truck-drone routing problem for parcel delivery by considering energy consumption and altitude. Annals of Operations Research 2023. [Google Scholar] [CrossRef]
- Han, Y.q.; Li, J.q.; Liu, Z.; Liu, C.; Tian, J. Metaheuristic algorithm for solving the multi-objective vehicle routing problem with time window and drones. International Journal of Advanced Robotic Systems 2020, 17. [Google Scholar] [CrossRef]
- Zeng, F.; Chen, Z.; Clarke, J.P.; Goldsman, D. Nested vehicle routing problem: Optimizing drone-truck surveillance operations. Transportation Research Part C: Emerging Technologies 2022, 139. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, Z.; Shi, J. A Two-Echelon Cooperated Routing Problem for a Ground Vehicle and Its Carried Unmanned Aerial Vehicle. Sensors 2017, 17, 1144. [Google Scholar] [CrossRef]
- Dukkanci, O.; Kara, B.Y.; Bektas, T. The Drone Delivery Problem. SSRN Electronic Journal 2019. [Google Scholar] [CrossRef]
- Peng, K.; Du, J.; Lu, F.; Sun, Q.; Dong, Y.; Zhou, P.; Hu, M. A Hybrid Genetic Algorithm on Routing and Scheduling for Vehicle-Assisted Multi-Drone Parcel Delivery. IEEE Access 2019, 7, 49191–49200. [Google Scholar] [CrossRef]
- Teimoury, E.; Rashid, R. A hybrid variable neighborhood search heuristic for the sustainable time-dependent truck-drone routing problem with rendezvous locations. Journal of Heuristics 2023. [Google Scholar] [CrossRef]
- Teimoury, E.; Rashid, R. The paired pickup and delivery problem with profit in a two-echelon delivery system with multiple trucks and drones. Transportation Letters 2023. [CrossRef]
- Ghiasvand, M.R.; Rahmani, D.; Moshref-Javadi, M. Data-driven robust optimization for a multi-trip truck-drone routing problem. Expert Systems with Applications 2024, 241. [Google Scholar] [CrossRef]
- Pina-Pardo, J.C.; Silva, D.F.; Smith, A.E. The traveling salesman problem with release dates and drone resupply. Computers & Operations Research 2021, 129. [Google Scholar] [CrossRef]
- Dienstknecht, M.; Boysen, N.; Briskorn, D. The traveling salesman problem with drone resupply. OR Spectrum 2022, 44, 1045–1086. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transportation Science 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. On the min-cost Traveling Salesman Problem with Drone. Transportation Research Part C: Emerging Technologies 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative Routing Problem for Ground Vehicle and Unmanned Aerial Vehicle: The Application on Intelligence, Surveillance, and Reconnaissance Missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Shi, J.; Wu, G.; Pedrycz, W. Two-Echelon Routing Problem for Parcel Delivery by Cooperated Truck and Drone. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2021, 51, 7450–7465. [Google Scholar] [CrossRef]
- El-Adle, A.M.; Ghoniem, A.; Haouari, M. The cost of carrier consistency: Last-mile delivery by vehicle and drone for subscription-based orders. Journal of the Operational Research Society 2023. [Google Scholar] [CrossRef]
- Najy, W.; Archetti, C.; Diabat, A. Collaborative truck-and-drone delivery for inventory-routing problems. Transportation Research Part C: Emerging Technologies 2023, 146, 103791. [Google Scholar] [CrossRef]
- Campuzano, G.; Lalla-Ruiz, E.; Mes, M. The drone-assisted variable speed asymmetric traveling salesman problem. Computers & Industrial Engineering 2023, 176, 109003. [Google Scholar] [CrossRef]
- Marinelli, M.; Caggiani, L.; Ottomanelli, M.; Dell’Orco, M. En route truck-drone parcel delivery for optimal vehicle routing strategies. IET Intelligent Transport Systems 2018, 12, 253–261. [Google Scholar] [CrossRef]
- Zhu, T.; Boyles, S.D.; Unnikrishnan, A. Battery electric vehicle traveling salesman problem with drone. Networks and Spatial Economics 2023. [Google Scholar] [CrossRef]
- Mara, S.T.W.; Sarker, R.; Essam, D.; Elsayed, S. Solving electric vehicle-drone routing problem using memetic algorithm. Swarm and Evolutionary Computation 2023, 79. [Google Scholar] [CrossRef]
- Yurek, E.E.; Ozmutlu, H.C. Traveling salesman problem with drone under recharging policy. Computer Communications 2021, 179, 35–49. [Google Scholar] [CrossRef]
- Peng, K.; Liu, W.; Sun, Q.; Ma, X.; Hu, M.; Wang, D.; Liu, J. Wide-Area Vehicle-Drone Cooperative Sensing: Opportunities and Approaches. IEEE Access 2019, 7, 1818–1828. [Google Scholar] [CrossRef]
- Chang, Y.S.; Lee, H.J. Optimal delivery routing with wider drone-delivery areas along a shorter truck-route. Expert Systems with Applications 2018, 104, 307–317. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Lee, S.; Winkenbach, M. Design and evaluation of a multi-trip delivery model with truck and drones. Transportation Research Part E: Logistics and Transportation Review 2020, 136, 101887. [Google Scholar] [CrossRef]
- Kang, M.; Lee, C. An Exact Algorithm for Heterogeneous Drone-Truck Routing Problem. Transportation Science 2021, 55, 1088–1112. [Google Scholar] [CrossRef]
- Lu, S.H.; Kuo, R.; Ho, Y.T.; Nguyen, A.T. Improving the efficiency of last-mile delivery with the flexible drones traveling salesman problem. Expert Systems with Applications 2022, 209, 118351. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Hemmati, A.; Winkenbach, M. A comparative analysis of synchronized truck-and-drone delivery models. Computers & Industrial Engineering 2021, 162, 107648. [Google Scholar] [CrossRef]
- Kim, S.; Moon, I. Traveling Salesman Problem With a Drone Station. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2019, 49, 42–52. [Google Scholar] [CrossRef]
- Karak, A.; Abdelghany, K. The hybrid vehicle-drone routing problem for pick-up and delivery services. Transportation Research Part C: Emerging Technologies 2019, 102, 427–449. [Google Scholar] [CrossRef]
- Faiz, T.I.; Vogiatzis, C.; Noor-E-Alam, Md. Computational approaches for solving two-echelon vehicle and UAV routing problems for post-disaster humanitarian operations. Expert Systems with Applications 2024, 237, 121473. [Google Scholar] [CrossRef]
- Kloster, K.; Moeini, M.; Vigo, D.; Wendt, O. The multiple traveling salesman problem in presence of drone- and robot-supported packet stations. European Journal of Operational Research 2023, 305, 630–643. [Google Scholar] [CrossRef]
- Zou, B.; Wu, S.; Gong, Y.; Yuan, Z.; Shi, Y. Delivery network design of a locker-drone delivery system. International Journal of Production Research 2023. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Hemmati, A.; Winkenbach, M. A truck and drones model for last-mile delivery: A mathematical model and heuristic approach. Applied Mathematical Modelling 2020, 80, 290–318. [Google Scholar] [CrossRef]
- Murray, C.C.; Raj, R. The multiple flying sidekicks traveling salesman problem: Parcel delivery with multiple drones. Transportation Research Part C: Emerging Technologies 2020, 110, 368–398. [Google Scholar] [CrossRef]
- Lin, M.; Lyu, J.Y.; Gao, J.J.; Li, L.Y. Model and Hybrid Algorithm of Collaborative Distribution System with Multiple Drones and a Truck. Scientific Programming 2020, 2020. [Google Scholar] [CrossRef]
- Luo, Z.; Poon, M.; Zhang, Z.; Liu, Z.; Lim, A. The Multi-visit Traveling Salesman Problem with Multi-Drones. Transportation Research Part C: Emerging Technologies 2021, 128, 103172. [Google Scholar] [CrossRef]
- Raj, R.; Murray, C. The multiple flying sidekicks traveling salesman problem with variable drone speeds. Transportation Research Part C: Emerging Technologies 2020, 120, 102813. [Google Scholar] [CrossRef]
- Leon-Blanco, J.M.; Gonzalez-R, P.; Andrade-Pineda, J.L.; Canca, D.; Calle, M. A multi-agent approach to the truck multi-drone routing problem. Expert Systems with Applications 2022, 195, 116604. [Google Scholar] [CrossRef]
- Gomez-Lagos, J.; Candia-Vejar, A.; Encina, F. A New Truck-Drone Routing Problem for Parcel Delivery Services Aided by Parking Lots. IEEE Access 2021, 9, 11091–11108. [Google Scholar] [CrossRef]
- Mahmoudi, B.; Eshghi, K. Energy-constrained multi-visit TSP with multiple drones considering non-customer rendezvous locations. Expert Systems with Applications 2022, 210, 118479. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transportation Research Part E: Logistics and Transportation Review 2022, 164, 102788. [Google Scholar] [CrossRef]
- Young Jeong, H.; Lee, S. Drone routing problem with truck: Optimization and quantitative analysis. Expert Systems with Applications 2023, 227, 120260. [Google Scholar] [CrossRef]
- Chen, Y.; Ren, S.; Chen, Z.; Chen, M.; Wu, H. Path Planning for Vehicle-borne System Consisting of Multi Air–ground Robots. Robotica 2020, 38, 493–511. [Google Scholar] [CrossRef]
- Morandi, N.; Leus, R.; Matuschke, J.; Yaman, H. The TSP with drones: The benefits of retraversing the arcs. Transportation Science 2023, 57, 1340–1358. [Google Scholar] [CrossRef]
- Sacramento, D.; Pisinger, D.; Ropke, S. An adaptive large neighborhood search metaheuristic for the vehicle routing problem with drones. Transportation Research Part C: Emerging Technologies 2019, 102, 289–315. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A hybrid VNS/Tabu search algorithm for solving the vehicle routing problem with drones and en route operations. Computers & Operations Research 2019, 109, 134–158. [Google Scholar] [CrossRef]
- Huang, S.H.; Huang, Y.H.; Blazquez, C.A.; Chen, C.Y. Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm. Advanced Engineering Informatics 2022, 51. [Google Scholar] [CrossRef]
- Lei, D.; Cui, Z.; Li, M. A dynamical artificial bee colony for vehicle routing problem with drones. Engineering Applications of Artificial Intelligence 2022, 107, 104510. [Google Scholar] [CrossRef]
- Wang, D.; Hu, P.; Du, J.; Zhou, P.; Deng, T.; Hu, M. Routing and Scheduling for Hybrid Truck-Drone Collaborative Parcel Delivery With Independent and Truck-Carried Drones. IEEE Internet of Things Journal 2019, 6, 10483–10495. [Google Scholar] [CrossRef]
- Luo, Z.; Gu, R.; Poon, M.; Liu, Z.; Lim, A. A last-mile drone-assisted one-to-one pickup and delivery problem with multi-visit drone trips. Computers & Operations Research 2022, 148, 106015. [Google Scholar] [CrossRef]
- Liu, Y.Q.; Han, J.; Zhang, Y.; Li, Y.; Jiang, T. Multivisit Drone-Vehicle Routing Problem with Simultaneous Pickup and Delivery considering No-Fly Zones. Discrete Dynamics in Nature and Society 2023, 2023, 1–21. [Google Scholar] [CrossRef]
- Mulumba, T.; Najy, W.; Diabat, A. The drone-assisted pickup and delivery problem: An adaptive large neighborhood search metaheuristic. Computers & Operations Research 2024, 161. [Google Scholar] [CrossRef]
- Xia, Y.; Wu, T.; Xia, B.; Zhang, J. Truck-drone pickup and delivery problem with drone weight-related cost. Sustainability 2023, 15. [Google Scholar] [CrossRef]
- Stodola, P.; Kutej, L. Multi-depot vehicle routing problem with drones: Mathematical formulation, solution algorithm and experiments. Expert Systems with Applications 2024, 241. [Google Scholar] [CrossRef]
- Coindreau, M.A.; Gallay, O.; Zufferey, N. Parcel delivery cost minimization with time window constraints using trucks and drones. Networks 2021, 78, 400–420. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J.; Tiwari, M.K. Synchronized Truck and Drone Routing in Package Delivery Logistics. IEEE Transactions on Intelligent Transportation Systems 2021, 22, 5772–5782. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. A branch-and-cut algorithm for the vehicle routing problem with drones. Transportation Research Part B: Methodological 2021, 144, 174–203. [Google Scholar] [CrossRef]
- Kuo, R.; Lu, S.H.; Lai, P.Y.; Mara, S.T.W. Vehicle routing problem with drones considering time windows. Expert Systems with Applications 2022, 191, 116264. [Google Scholar] [CrossRef]
- Li, H.; Zhao, J.; Zhan, Z. Truck and Unmanned Vehicle Routing Problem with Time Windows: A Satellite Synchronization Perspective. Journal of Advanced Transportation 2022, 2022, 1–20. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Lai, K.K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Yin, Y.; Li, D.; Wang, D.; Ignatius, J.; Cheng, T.; Wang, S. A branch-and-price-and-cut algorithm for the truck-based drone delivery routing problem with time windows. European Journal of Operational Research 2023, 309, 1125–1144. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Y. Collaborative vehicle-drone distribution network optimization for perishable products in the epidemic situation. Computers & Operations Research 2023, 149. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Hu, X.; Xue, G.; Guan, X. Truck–drone hybrid routing problem with time-dependent road travel time. Transportation Research Part C: Emerging Technologies 2022, 144, 103901. [Google Scholar] [CrossRef]
- Xing, J.; Su, L.; Hong, W.; Tong, L.; Lyu, R.; Du, W. Aerial-ground collaborative routing with time constraints. Chinese Journal of Aeronautics 2023, 36, 270–283. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, J.; Yang, C. A humanitarian vehicle routing problem synchronized with drones in time-varying weather conditions. Computers & Industrial Engineering 2023, 184, 109563. [Google Scholar] [CrossRef]
- Zang, X.; Jiang, L.; Liang, C.; Dong, J.; Lu, W.; Mladenovic, N. Optimization approaches for the urban delivery problem with trucks and drones. Swarm and Evolutionary Computation 2022, 75, 101147. [Google Scholar] [CrossRef]
- Kuo, R.; Edbert, E.; Zulvia, F.E.; Lu, S.H. Applying NSGA-II to vehicle routing problem with drones considering makespan and carbon emission. Expert Systems with Applications 2023, 221, 119777. [Google Scholar] [CrossRef]
- Li, H.; Wang, H.; Chen, J.; Bai, M. Two-echelon vehicle routing problem with time windows and mobile satellites. Transportation Research Part B: Methodological 2020, 138, 179–201. [Google Scholar] [CrossRef]
- Chen, C.; Demir, E.; Huang, Y. An adaptive large neighborhood search heuristic for the vehicle routing problem with time windows and delivery robots. European Journal of Operational Research 2021, 294, 1164–1180. [Google Scholar] [CrossRef]
- Gao, J.; Zhen, L.; Wang, S. Multi-trucks-and-drones cooperative pickup and delivery problem. Transportation Research Part C: Emerging Technologies 2023, 157. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Tanchoco, J.M.; Brunese, P.A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Computers & Industrial Engineering 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Wang, Z.; Sheu, J.B. Vehicle routing problem with drones. Transportation Research Part B: Methodological 2019, 122, 350–364. [Google Scholar] [CrossRef]
- Amine Masmoudi, M.; Mancini, S.; Baldacci, R.; Kuo, Y.H. Vehicle routing problems with drones equipped with multi-package payload compartments. Transportation Research Part E: Logistics and Transportation Review 2022, 164, 102757. [Google Scholar] [CrossRef]
- Jiang, J.; Dai, Y.; Yang, F.; Ma, Z. A multi-visit flexible-docking vehicle routing problem with drones for simultaneous pickup and delivery services. European Journal of Operational Research 2024, 312, 125–137. [Google Scholar] [CrossRef]
- Kim, D.; Ko, C.S.; Moon, I. Coordinated logistics with trucks and drones for premium delivery. Transportmetrica A: Transport Science 2023. [Google Scholar] [CrossRef]
- Rave, A.; Fontaine, P.; Kuhn, H. Drone location and vehicle fleet planning with trucks and aerial drones. European Journal of Operational Research 2023, 308, 113–130. [Google Scholar] [CrossRef]
- Li, H.; Wang, F.; Zhan, Z. Truck and rotary-wing drone routing problem considering flight-level selection. Journal of the Operational Research Society 2023. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, G.; Pang, Z.; Li, L. Continuum approximation models for joint delivery systems using trucks and drones. Enterprise Information Systems 2020, 14, 406–435. [Google Scholar] [CrossRef]
- De Freitas, J.C.; Penna, P.H.V. A Randomized Variable Neighborhood Descent Heuristic to Solve the Flying Sidekick Traveling Salesman Problem. Electronic Notes in Discrete Mathematics 2018, 66, 95–102. [Google Scholar] [CrossRef]
- Crişan, G.C.; Nechita, E. On a cooperative truck-and-drone delivery system. Knowledge-Based and Intelligent Information & Engineering Systems: Proceedings of the 23rd International Conference KES2019 2019, 159, 38–47. [Google Scholar] [CrossRef]
- De Freitas, J.C.; Penna, P.H.V. A variable neighborhood search for flying sidekick traveling salesman problem. International Transactions in Operational Research 2020, 27, 267–290. [Google Scholar] [CrossRef]
- Boccia, M.; Masone, A.; Sforza, A.; Sterle, C. A column-and-row generation approach for the flying sidekick travelling salesman problem. Transportation Research Part C: Emerging Technologies 2021, 124, 102913. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Drone-assisted deliveries: new formulations for the Flying Sidekick Traveling Salesman Problem. Optimization Letters 2021, 15, 1617–1648. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Algorithms based on branch and bound for the flying sidekick traveling salesman problem. Omega 2021, 104, 102493. [Google Scholar] [CrossRef]
- Kundu, A.; Escobar, R.G.; Matis, I.T. An efficient routing heuristic for a drone-assisted delivery problem. IMA Journal of Management Mathematics 2022, 33, 583–601. [Google Scholar] [CrossRef]
- Bouman, P.; Agatz, N.; Schmidt, M. Dynamic programming approaches for the traveling salesman problem with drone. Networks 2018, 72, 528–542. [Google Scholar] [CrossRef]
- Es Yurek, E.; Ozmutlu, H.C. A decomposition-based iterative optimization algorithm for traveling salesman problem with drone. Transportation Research Part C: Emerging Technologies 2018, 91, 249–262. [Google Scholar] [CrossRef]
- Poikonen, S.; Golden, B.; Wasil, E.A. A Branch-and-Bound Approach to the Traveling Salesman Problem with a Drone. INFORMS Journal on Computing 2019, 31, 335–346. [Google Scholar] [CrossRef]
- Poikonen, S.; Wang, X.; Golden, B. The vehicle routing problem with drones: Extended models and connections. Networks 2017, 70, 34–43. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. A hybrid genetic algorithm for the traveling salesman problem with drone. Journal of Heuristics 2020, 26, 219–247. [Google Scholar] [CrossRef]
- El-Adle, A.M.; Ghoniem, A.; Haouari, M. Parcel delivery by vehicle and drone. Journal of the Operational Research Society 2021, 72, 398–416. [Google Scholar] [CrossRef]
- Roberti, R.; Ruthmair, M. Exact Methods for the Traveling Salesman Problem with Drone. Transportation Science 2021, 55, 315–335. [Google Scholar] [CrossRef]
- Vásquez, S.A.; Angulo, G.; Klapp, M.A. An exact solution method for the TSP with Drone based on decomposition. Computers & Operations Research 2021, 127, 105127. [Google Scholar] [CrossRef]
- Tong, B.; Wang, J.; Wang, X.; Zhou, F.; Mao, X.; Zheng, W. Optimal Route Planning for Truck-Drone Delivery Using Variable Neighborhood Tabu Search Algorithm. Applied Sciences-Basel 2022, 12. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Modeling the flying sidekick traveling salesman problem with multiple drones. Networks 2021, 78, 303–327. [Google Scholar] [CrossRef]
- Mara, S.T.W.; Rifai, A.P.; Sopha, B.M. An adaptive large neighborhood search heuristic for the flying sidekick traveling salesman problem with multiple drops. Expert Systems with Applications 2022, 205. [Google Scholar] [CrossRef]
- Rinaldi, M.; Primatesta, S.; Bugaj, M.; Rostas, J.; Guglieri, G. Development of heuristic approaches for last-mile delivery TSP with a truck and multiple drones. Drones 2023, 7. [Google Scholar] [CrossRef]
- Seifried, K. The Traveling Salesman Problem With One Truck and Multiple Drones. SSRN Electronic Journal 2019. [Google Scholar] [CrossRef]
- Cavani, S.; Iori, M.; Roberti, R. Exact methods for the traveling salesman problem with multiple drones. Transportation Research Part C: Emerging Technologies 2021, 130, 103280. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A matheuristic for the vehicle routing problem with drones and its variants. Transportation Research Part C: Emerging Technologies 2019, 106, 166–204. [Google Scholar] [CrossRef]
- Ibroska, B.; Ozpeynirci, S.; Ozpeynirci, O. Multiple traveling salesperson problem with drones: General variable neighborhood search approach. Computers & Operations Research 2023, 160, 106390. [Google Scholar] [CrossRef]
- Mulumba, T.; Diabat, A. Optimization of the drone-assisted pickup and delivery problem. Transportation Research Part E: Logistics and Transportation Review 2024, 181. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Zhang, C.; Yang, H. A branch-and-price-and-cut algorithm for the vehicle routing problem with load-dependent drones. Transportation Research Part B: Methodological 2023, 171, 80–110. [Google Scholar] [CrossRef]
- Omagari, H.; Higashino, S. Provisional-Ideal-Point-Based Multi-objective Optimization Method for Drone Delivery Problem. International Journal of Aeronautical and Space Sciences 2018, 19, 262–277. [Google Scholar] [CrossRef]
- Wang, K.; Yuan, B.; Zhao, M.; Lu, Y. Cooperative route planning for the drone and truck in delivery services: A bi-objective optimisation approach. Journal of the Operational Research Society 2020, 71, 1657–1674. [Google Scholar] [CrossRef]
- Momeni, M.; Soleimani, H.; Shahparvari, S.; Afshar-Nadjafi, B. A multi-agency coordination resource allocation and routing decision-making problem: A coordinated truck-and-drone DSS for improved wildfire detection coverage. International Journal of Disaster Risk Reduction 2023, 97. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, S.; Xu, W.; Wang, W. A novel multi-objective optimization model for the vehicle routing problem with drone delivery and dynamic flight endurance. Computers & Industrial Engineering 2022, 173. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, X.; Ren, X. Path Optimization of Joint Delivery Mode of Trucks and UAVs. Mathematical Problems in Engineering 2021, 2021. [Google Scholar] [CrossRef]
- Luo, Q.; Wu, G.; Ji, B.; Wang, L.; Suganthan, P.N. Hybrid Multi-Objective Optimization Approach With Pareto Local Search for Collaborative Truck-Drone Routing Problems Considering Flexible Time Windows. IEEE Transactions on Intelligent Transportation Systems 2022, 23, 13011–13025. [Google Scholar] [CrossRef]
- Meng, Z.; Zhou, Y.; Li, E.Y.; Peng, X.; Qiu, R. Environmental and economic impacts of drone-assisted truck delivery under the carbon market price. Journal of Cleaner Production 2023, 401. [Google Scholar] [CrossRef]
- Gonzalez-R, P.L.; Sanchez-Wells, D.; Andrade-Pineda, J.L. A bi-criteria approach to the truck-multidrone routing problem. Expert Systems with Applications 2024, 243. [Google Scholar] [CrossRef]
- Montaña, L.C.; Malagon-Alvarado, L.; Miranda, P.A.; Arboleda, M.M.; Solano-Charris, E.L.; Vega-Mejía, C.A. A novel mathematical approach for the Truck-and-Drone Location-Routing Problem. Procedia Computer Science 2022, 200, 1378–1391. [Google Scholar] [CrossRef]
- Li, D.; Ignatius, J.; Wang, D.; Yin, Y.; Cheng, T.C.E. A branch-and-price-and-cut algorithm for the truck-drone routing problem with simultaneously delivery and pickup. Naval Research Logistics 2024, 71, 241–285. [Google Scholar] [CrossRef]
- Cheng, L.; Xin, L.; XueDong, C.; Bin, H. Route planning of truck and multi-drone rendezvous with available time window constraints of drones. Science China-Technological Sciences 2022, 65, 2190–2204. [Google Scholar] [CrossRef]
- Yang, Y.; Yan, C.; Cao, Y.; Roberti, R. Planning robust drone-truck delivery routes under road traffic uncertainty. European Journal of Operational Research 2023, 309, 1145–1160. [Google Scholar] [CrossRef]
- Luo, Q.; Wu, G.; Trivedi, A.; Hong, F.; Wang, L.; Srinivasan, D. Multi-Objective Optimization Algorithm With Adaptive Resource Allocation for Truck-Drone Collaborative Delivery and Pick-Up Services. IEEE Transactions on Intelligent Transportation Systems 2023, 24, 9642–9657. [Google Scholar] [CrossRef]
- Kong, F.; Jiang, B.; Wang, J.; Wang, H.; Song, H. Collaborative Delivery Optimization With Multiple Drones via Constrained Hybrid Pointer Network. IEEE Internet of Things Journal 2023, 1–1. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Wang, F.; Zhao, Y. Truck and drone routing problem with synchronization on arcs. Naval Research Logistics 2022, 69, 884–901. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Song, B.D.; Lee, S. Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. International Journal of Production Economics 2019, 214, 220–233. [Google Scholar] [CrossRef]
- Zhang, Q.; Huang, X.; Zhang, H.; He, C. Research on logistics path optimization for a two-stage collaborative delivery system using vehicles and UAVs. Sustainability 2023, 15. [Google Scholar] [CrossRef]
- Baik, H.; Valenzuela, J. An optimization drone routing model for inspecting wind farms. Soft Computing 2021, 25, 2483–2498. [Google Scholar] [CrossRef]
- Masone, A.; Poikonen, S.; Golden, B.L. The multivisit drone routing problem with edge launches: An iterative approach with discrete and continuous improvements. Networks 2022, 80, 193–215. [Google Scholar] [CrossRef]
- Thomas, T.; Srinivas, S.; Rajendran, C. Collaborative truck multi-drone delivery system considering drone scheduling and en route operations. Annals of Operations Research 2023. [Google Scholar] [CrossRef]
- Yu, V.F.; Lin, S.W.; Jodiawan, P.; Lai, Y.C. Solving the flying sidekick traveling salesman problem by a simulated annealing heuristic. Mathematics 2023, 11. [Google Scholar] [CrossRef]
- Boccia, M.; Mancuso, A.; Masone, A.; Sterle, C. A new MILP formulation for the flying sidekick traveling salesman problem. Networks 2023, 82, 254–276. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Exact models for the flying sidekick traveling salesman problem. International Transactions in Operational Research 2022, 29, 1360–1393. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A branch-and-cut approach and alternative formulations for the traveling salesman problem with drone. Networks 2020, 76, 164–186. [Google Scholar] [CrossRef]
- Tiniç, G.O.; Karasan, O.E.; Kara, B.Y.; Campbell, J.F.; Ozel, A. Exact solution approaches for the minimum total cost traveling salesman problem with multiple drones. Transportation Research Part B: Methodological 2023, 168, 81–123. [Google Scholar] [CrossRef]
- Gu, R.; Poon, M.; Luo, Z.; Liu, Y.; Liu, Z. A hierarchical solution evaluation method and a hybrid algorithm for the vehicle routing problem with drones and multiple visits. Transportation Research Part C: Emerging Technologies 2022, 141, 103733. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. The vehicle routing problem with drones and drone speed selection. Computers & Operations Research 2023, 152. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Matheuristic algorithms for the parallel drone scheduling traveling salesman problem. Annals of Operations Research 2020, 289, 211–226. [Google Scholar] [CrossRef]
- Boschetti, M.A.; Novellani, S. Last-mile delivery with drone and lockers. Networks 2023. [Google Scholar] [CrossRef]
- Morandi, N.; Leus, R.; Yaman, H. The orienteering problem with drones. Transportation Science 2023. [Google Scholar] [CrossRef]
- Zhou, H.; Qin, H.; Cheng, C.; Rousseau, L.M. An exact algorithm for the two-echelon vehicle routing problem with drones. Transportation Research Part B: Methodological 2023, 168, 124–150. [Google Scholar] [CrossRef]
- Zhen, L.; Gao, J.; Tan, Z.; Wang, S.; Baldacci, R. Branch-price-and-cut for trucks and drones cooperative delivery. IISE Transactions 2023, 55, 271–287. [Google Scholar] [CrossRef]
- Li, H.; Wang, F. Branch-price-and-cut for the truck–drone routing problem with time windows. Naval Research Logistics 2023, 70, 184–204. [Google Scholar] [CrossRef]
- Blufstein, M.; Lera-Romero, G.; Soulignac, F.J. Decremental state-space relaxations for the basic traveling salesman problem with a drone. INFORMS Journal on Computing 2024. [Google Scholar] [CrossRef]
- Gonzalez-R, P.L.; Canca, D.; Andrade-Pineda, J.L.; Calle, M.; Leon-Blanco, J.M. Truck-drone team logistics: A heuristic approach to multi-drop route planning. Transportation Research Part C: Emerging Technologies 2020, 114, 657–680. [Google Scholar] [CrossRef]
- Erdoğan, G.; Yıldırım, E.A. Exact and Heuristic Algorithms for the Carrier–Vehicle Traveling Salesman Problem. Transportation Science 2021, 55, 101–121. [Google Scholar] [CrossRef]
- Wu, G.; Mao, N.; Luo, Q.; Xu, B.; Shi, J.; Suganthan, P.N. Collaborative Truck-Drone Routing for Contactless Parcel Delivery During the Epidemic. IEEE Transactions on Intelligent Transportation Systems 2022, 23, 25077–25091. [Google Scholar] [CrossRef]
- Bai, X.; Cao, M.; Yan, W.; Ge, S.S. Efficient Routing for Precedence-Constrained Package Delivery for Heterogeneous Vehicles. IEEE Transactions on Automation Science and Engineering 2020, 17, 248–260. [Google Scholar] [CrossRef]
- Bai, X.; Ye, Y.; Zhang, B.; Ge, S.S. Efficient Package Delivery Task Assignment for Truck and High Capacity Drone. IEEE Transactions on Intelligent Transportation Systems 2023, 24, 13422–13435. [Google Scholar] [CrossRef]
- Park, H.J.; Mirjalili, R.; Cote, M.J.; Lim, G.J. Scheduling Diagnostic Testing Kit Deliveries with the Mothership and Drone Routing Problem. Journal of Intelligent & Robotic Systems 2022, 105. [Google Scholar] [CrossRef]
- Morim, A.; Campuzano, G.; Amorim, P.; Mes, M.; Lalla-Ruiz, E. The drone-assisted vehicle routing problem with robot stations. Expert Systems with Applications 2024, 238. [Google Scholar] [CrossRef]
- Zhou, X.; Feng, Y. Research on path optimization of vehicle-drone joint distribution considering customer priority. Complexity 2024, 2024. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, W.; Yang, S.; Shi, J. A novel truck-drone collaborative service network for wide-range drone delivery using a modified variable neighborhood search algorithm. Journal of Intelligent & Fuzzy Systems 2022, 43, 5165–5184. [Google Scholar] [CrossRef]
- Ndiaye, M.; Osman, A.; Salhi, S.; Madani, B. The truck-drone routing optimization problem: mathematical model and a VNS approach. Optimization Letters 2023. [Google Scholar] [CrossRef]
- Yanpirat, N.; Silva, D.F.; Smith, A.E. Sustainable last mile parcel delivery and return service using drones. Engineering Applications of Artificial Intelligence 2023, 124. [Google Scholar] [CrossRef]
- AlMuhaideb, S.; Alhussan, T.; Alamri, S.; Altwaijry, Y.; Aljarbou, L.; Alrayes, H. Optimization of Truck-Drone Parcel Delivery Using Metaheuristics. Applied Sciences-Basel 2021, 11. [Google Scholar] [CrossRef]
- Vu, L.; Vu, D.M.; Ha, M.H.; Nguyen, V.P. The two-echelon routing problem with truck and drones. International Transactions in Operational Research 2022, 29, 2968–2994. [Google Scholar] [CrossRef]
- Ostermeier, M.; Heimfarth, A.; Hübner, A. The multi-vehicle truck-and-robot routing problem for last-mile delivery. European Journal of Operational Research 2023, 310, 680–697. [Google Scholar] [CrossRef]
- Mourelo Ferrandez, S.; Harbison, T.; Weber, T.; Sturges, R.; Rich, R. Optimization of a truck-drone in tandem delivery network using k-means and genetic algorithm. Journal of Industrial Engineering and Management 2016, 9, 374. [Google Scholar] [CrossRef]
- Karakose, E. A new last mile delivery approach for the hybrid truck multi-drone problem using a genetic algorithm. Applied Sciences-Basel 2024, 14. [Google Scholar] [CrossRef]
- Meng, S.; Guo, X.; Li, D.; Liu, G. The multi-visit drone routing problem for pickup and delivery services. Transportation Research Part E: Logistics and Transportation Review 2023, 169, 102990. [Google Scholar] [CrossRef]
- Carlsson, J.G.; Song, S. Coordinated Logistics with a Truck and a Drone. Management Science 2018, 64, 4052–4069. [Google Scholar] [CrossRef]
- Canca, D.; Navarro-Carmona, B.; Luis Andrade-Pineda, J. Design and Assessment of an Urban Circular Combined Truck-Drone Delivery System Using Continuum Approximation Models and Integer Programming. Sustainability 2022, 14. [Google Scholar] [CrossRef]
- Wu, G.; Fan, M.; Shi, J.; Feng, Y. Reinforcement Learning Based Truck-and-Drone Coordinated Delivery. IEEE Transactions on Artificial Intelligence 2023, 4, 754–763. [Google Scholar] [CrossRef]
Figure 1.
Papers published in the field of routing problems for cooperated trucks and drones before 2024
Figure 1.
Papers published in the field of routing problems for cooperated trucks and drones before 2024

Figure 2.
Four cooperative modes of trucks and drones
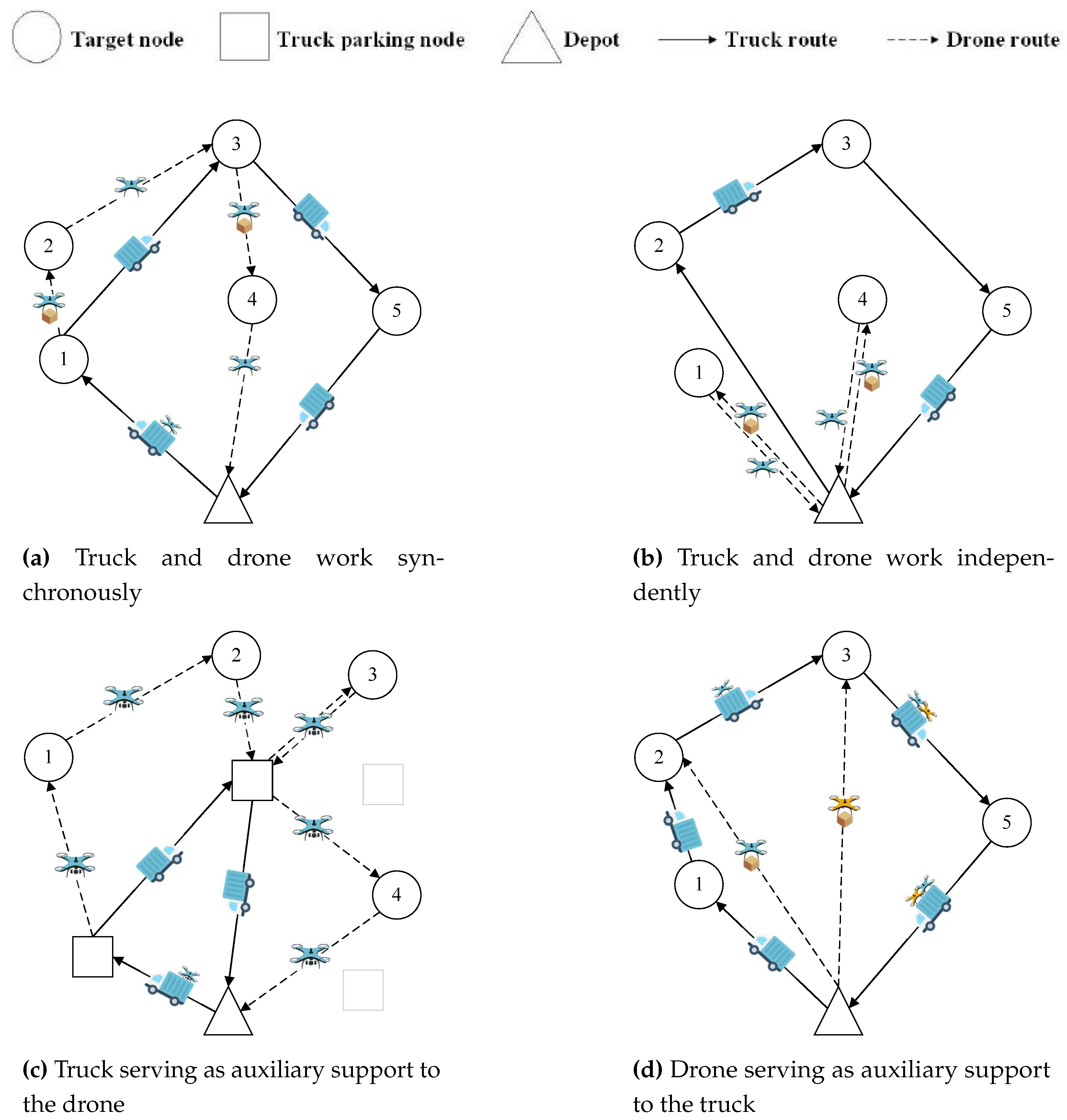
Figure 3.
The distribution diagram of the configurations of trucks and drones
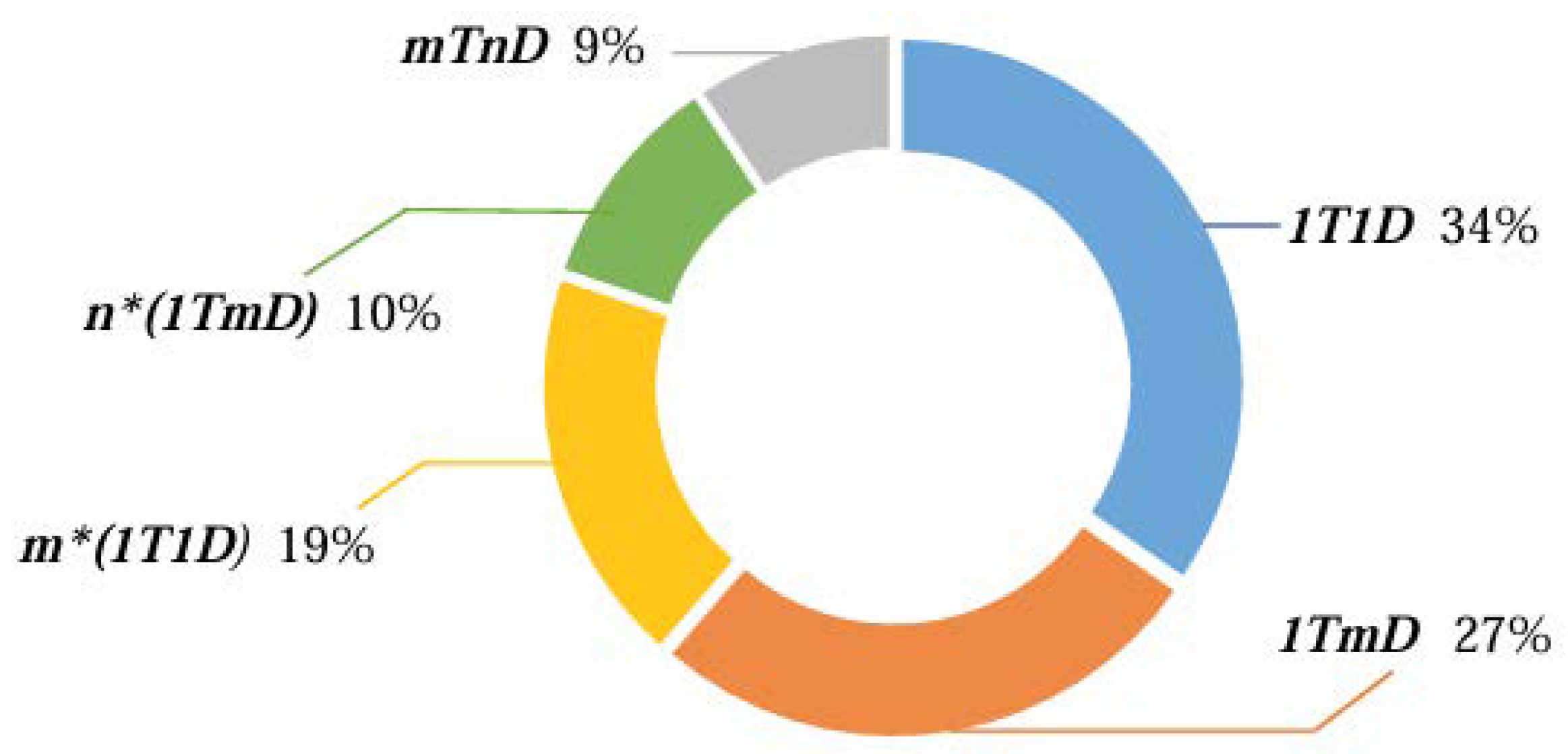
Figure 4.
The distribution diagram of objectives
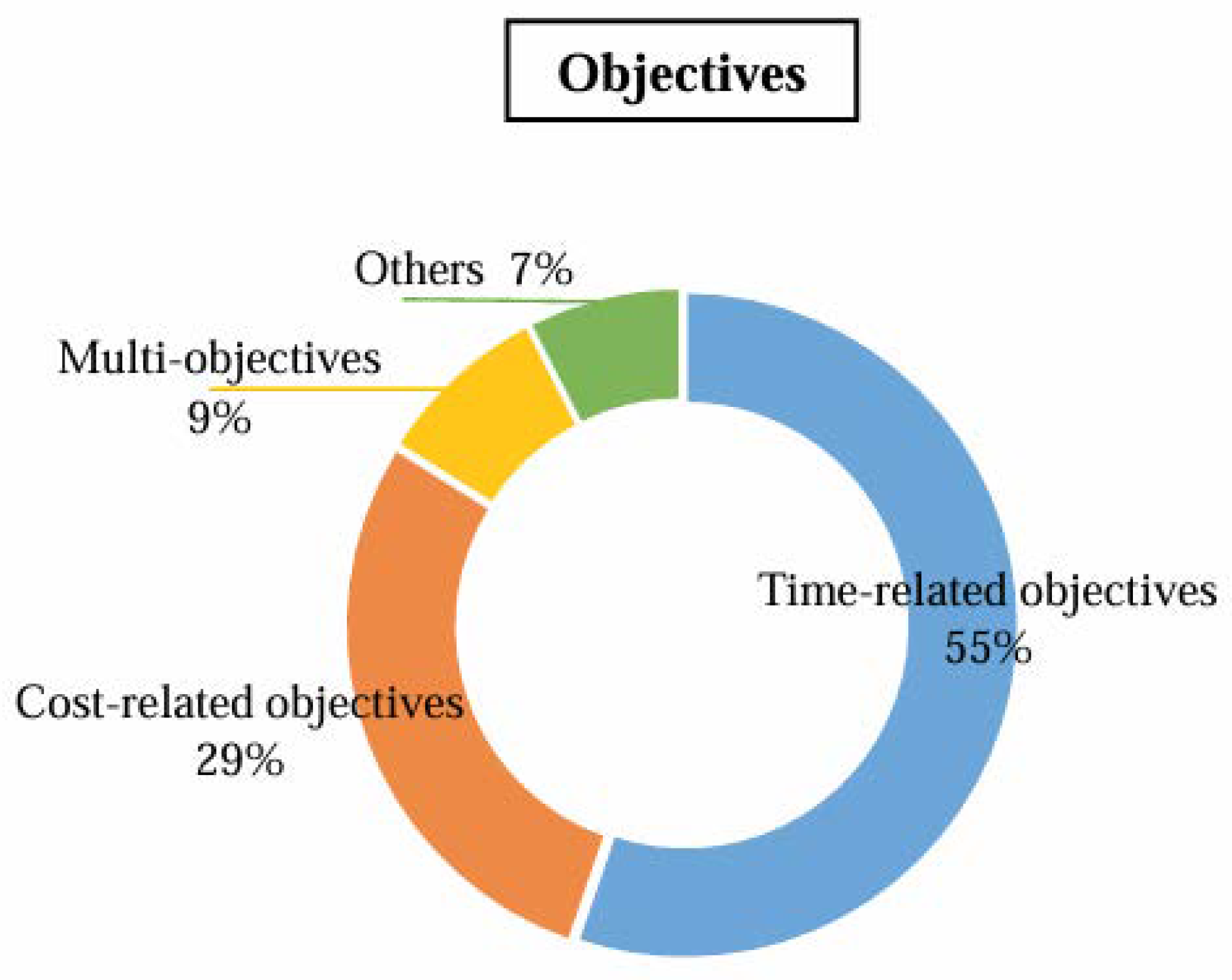
Figure 5.
Constraints involved in the literature
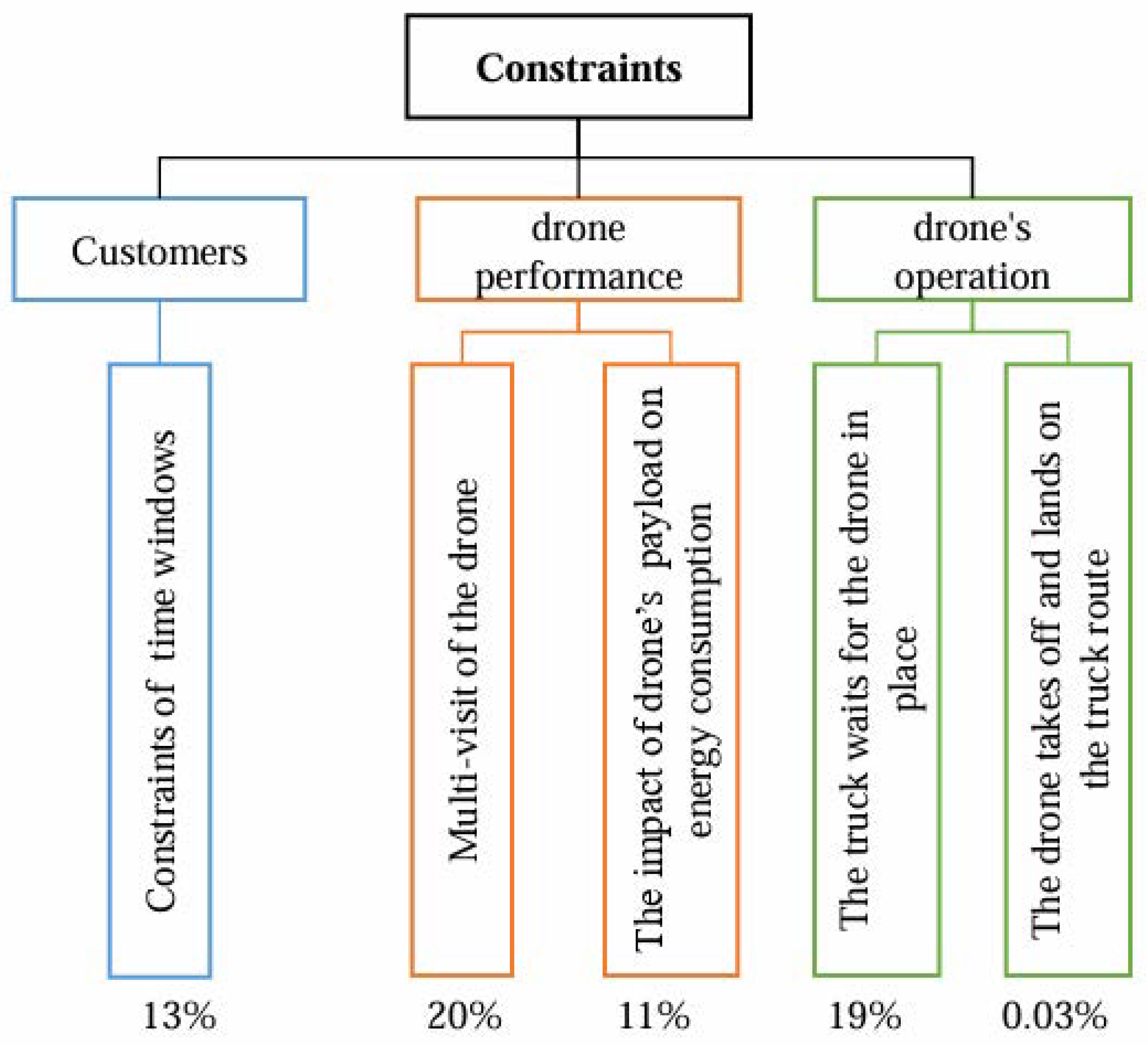
Figure 6.
Illustrations of two operations of the drone
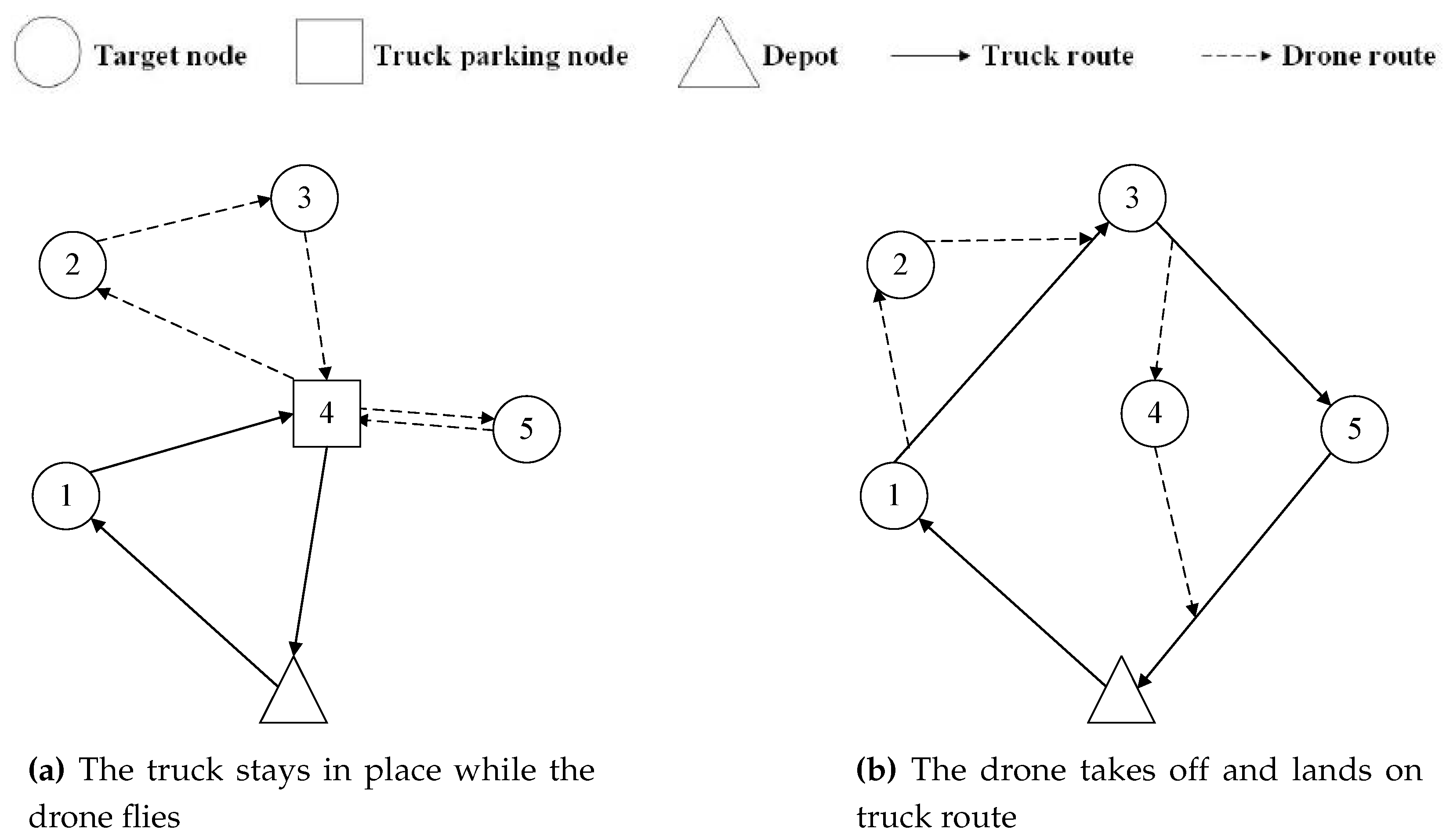
Figure 7.
The proportions of methodologies used in the current researches
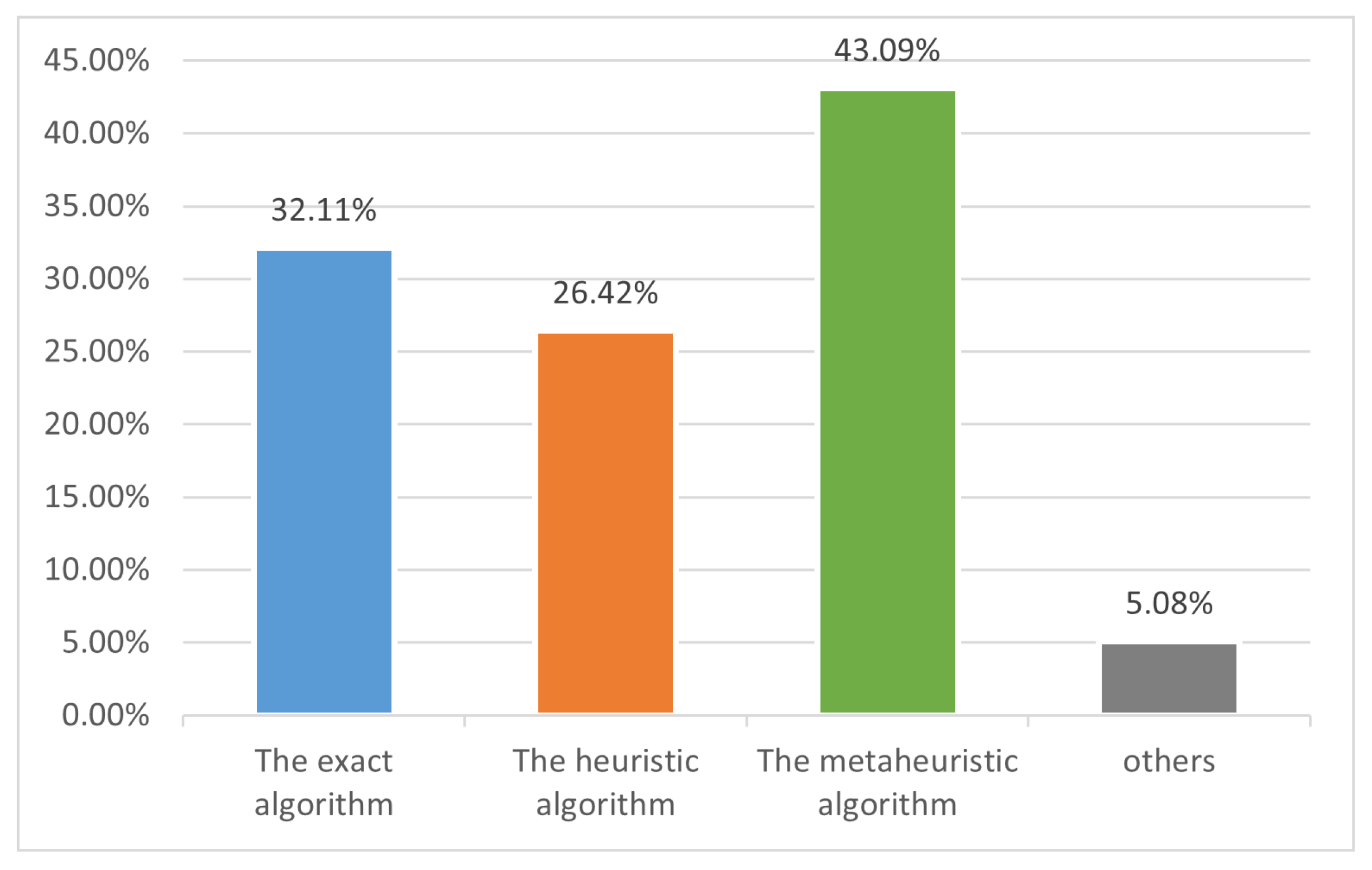
Figure 8.
The utilization distribution diagram of the mathematical models
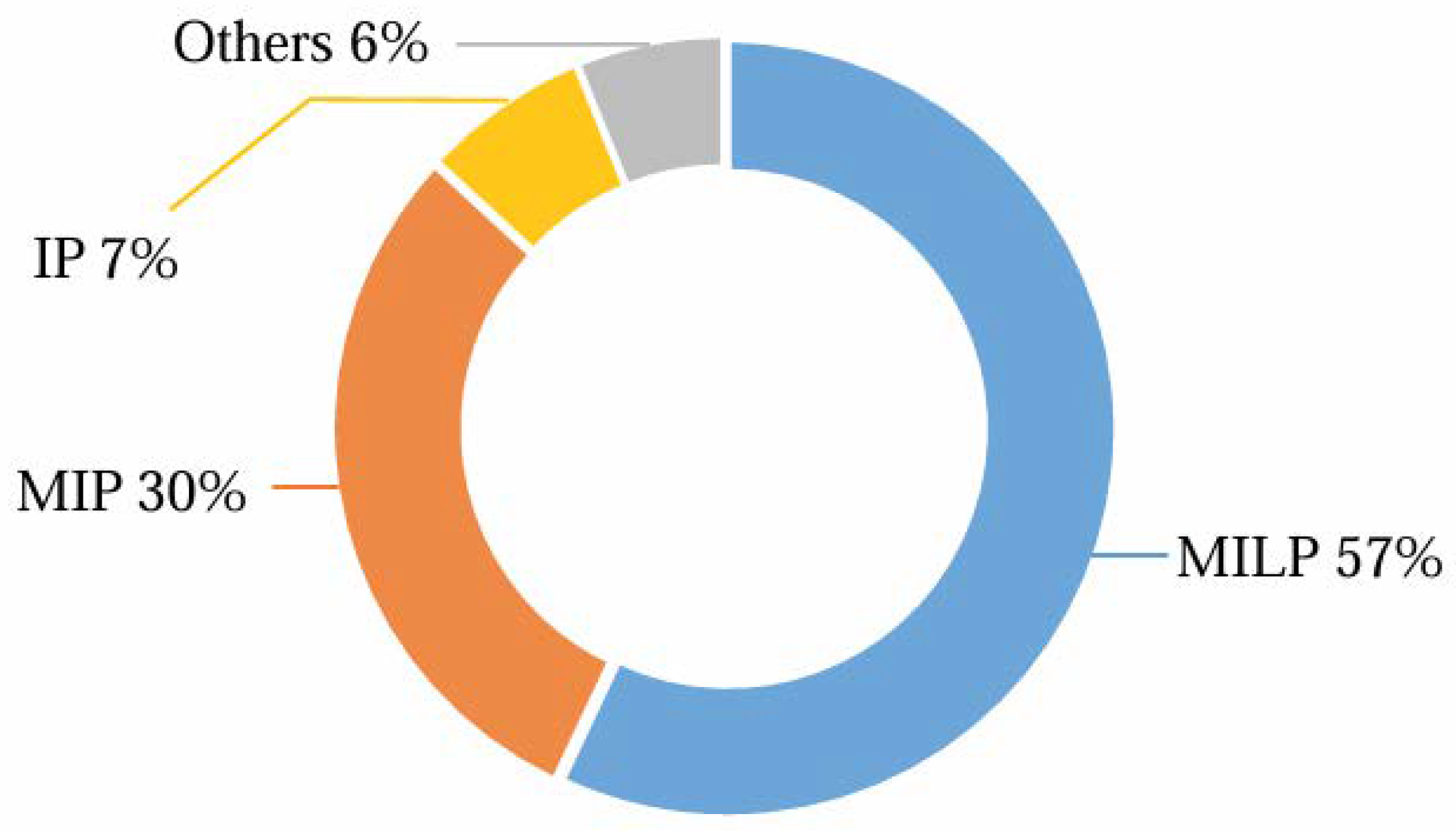
Figure 9.
Map of the distribution diagram of the types of metaheuristic algorithms in the literature
Figure 9.
Map of the distribution diagram of the types of metaheuristic algorithms in the literature
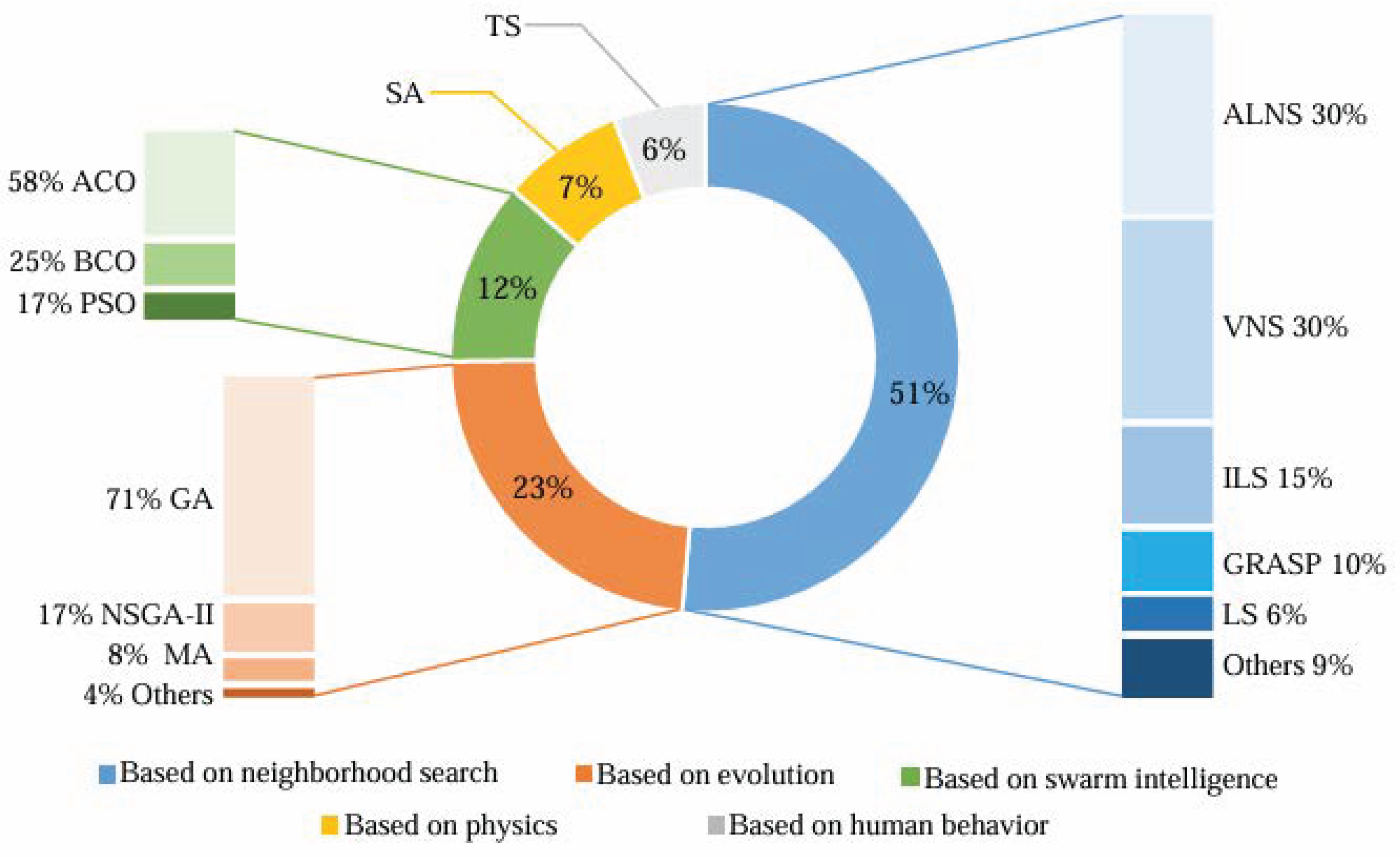

Table 1.
The comparison of the characteristics between the drone and the truck
| Characteristics | Drone | Truck |
|---|---|---|
| Payload | Low | High |
| Endurance | Short | Long |
| Unit cost | Low | High |
| Route | Permitted airspace | Along road network |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



