Submitted:
13 September 2024
Posted:
16 September 2024
You are already at the latest version
Abstract
The two-thirds power law is a link between angular speed $\omega$ and curvature $\kappa$ observed in voluntary human movements: $\omega$ is proportional to $\kappa^{2/3}$. Squared jerk is known to be a Lagrangian leading to the latter law. However, it leads to unbounded movements and is therefore incompatible with a quasi-periodic dynamics, such as the movement of the tip of a pen drawing ellipses.
To solve this drawback, we give a class of higher-derivative Lagrangians that allow for both quasi-periodic and unbounded movements, and at the same time leading to the two-thirds power law.
We then perform the Hamiltonian analysis leading to action-angle variables through Ostrogradski's procedure. In this framework, squared jerk is recovered as an action variable, and its minimization may be related to power expenditure minimization during motion. The identified higher-derivative Lagrangians are therefore natural candidates for cost functions, i.e. movement functions that are targeted to be minimal when an individual performs a voluntary movement.
Keywords:
Higher-derivative actions
; Phase-space
; Motor control
; Biomechanics
; Adiabatic invariant
1. Introduction
Understanding the fundamental principles governing motions observed in Nature can be thought of as one of humanity’s earliest philosophical endeavours: Making sense of the perceived physical world naturally leads to the study of mechanics. After the pioneering works of Newton (1643–1727), mechanics considerably evolved thanks to the reformulations of Lagrange (1736–1813) and Hamilton (1805–1865), see e.g. [1] for a detailed discussion of these formulations. The Newtonian approach relies on the fundamental equation in Cartesian coordinates, where the total external force acting on a pointlike body of inertial mass m gives it an acceleration , which in turn allows to yield the velocity and position of the body after successive integrations and upon imposing initial conditions. By invoking a principle of least action, Lagrange replaced Newton’s equation by the search for a single function named after him and denoted by . In its original formulation, the Lagrangian L depends on the configuration (position) space variables and their first-order time derivative , where and the integer n is the dimension of the configuration space, i.e., the number of degrees of freedom of the system once all the holonomic constraints have been taken into account. Typically, , the difference between the kinetic and potential energy functions of the system. Lagrange’s postulate is that the dynamical system, during its temporal evolution between two instants and , will always minimize the action . The motion is then given by Hamilton’s variational principle subjected to the boundary conditions .
In the realm of motor control, that resides at the intersection of biomechanics, neuroscience, and mathematics, there has been a paradigm shift akin to the one from Newtonian to Lagrangian mechanics. Instead of merely describing motion, researchers have begun to ask why organisms move the way they do. Indeed, certain actions or behaviours are repeated in a consistent manner. The concept of stereotyped movements has been observed centuries ago, among others by Sherrington in 1906 [2]. The answer may lie in the minimization of a cost function, a mathematical representation of the effort, energy, or some other metric that a biological system tries to optimize. The interested reader may find reviews about optimal control theory in motor control in [3,4]. By quantifying the cost linked with diverse trajectories or control strategies, these functions illuminate pathways to optimal movement strategies.
Traditionally applied to describe the dynamics of non-living physical systems, the recent introduction of Lagrangians as cost functions offers new insights accompanied by new challenges. One frequently cited cost functions in motor control relies on what is called the jerk, , a vectorial quantity related to movement smoothness [5]. Research suggests that when humans make smooth, unperturbed movements, the trajectory they follow tends to minimize the averaged squared jerk, i.e., the movement minimizes the following action [6]
An apparent paradox that we aim to solve in the present study is that, from a mechanical point of view, the Lagrangian does not lead to bounded trajectories. Indeed, the solutions of the Euler-Lagrange equations based on the Lagrangian are polynomials of degree three in the time parameter t; they are clearly not (quasi-)periodic solutions. The jerk has however been considered in the study of bounded trajectories, which is clearly problematic for describing voluntary movements such as the drawing of ellipses on a sheet of paper. We propose another framework in which higher-derivative actions produce bounded trajectories satisfying two-thirds law, see below, and in which the minimization of jerk appears to be a dynamical consequence of the variational principle. By higher-derivative we mean a Lagrangian depending on the first derivatives of the dynamical variables , i.e., depending on , , , etc. Three-dimensional vectors are assumed throughout. Study of such higher-derivative classical systems with finitely many degrees of freedom will be achieved by resorting to Ostrogradski’s approach [7].
Although cost functions can be central in elucidating optimal movement trajectories, they are not the only framework in motor control research. Another approach is to identify conserved quantities or invariants. Invariants, as the term implies, are quantities whose value stays constant during dynamical evolution. A particularly illuminating example of this field is the empirical two-thirds power law, hereafter referred to as 2/3-PL. It has been found in [8] and can be written as
with velocity , speed and a constant. One speaks of “two-thirds" because this law’s original formulation involved the angular speed where is the curvature (the inverse of the radius R of the osculating circle) of the trajectory at the given time, leading to , i.e. the exponent. The initial observation was that the speed of a drawing or writing movement is related to the curvature of the drawing. This law has since been observed in a wide range of planar movements, see e.g. the review [9], and especially in elliptic trajectories. Note that a more general link of the type
may be observed in an even wider class of trajectories [10], though we will not consider this generalization here. There has been a lot of debate on 2/3-PL, some authors claiming that it is mostly an artefact due to fitting procedures, while others (including the authors of this paper) argue that this law is indeed a behavioural consequence of a fundamental law in human motion [9]. Results from various studies challenge a purely kinematic interpretation of the 2/3-PL and highlight the role of the central nervous system in motion planning, that leads to (2), using motor imagery paradigms for covert movements [11,12].
This investigation aims to extend the understanding of cost functions through the lens of higher-derivative Lagrangians. It proposes that a class of higher-derivative actions broader than (1) leads to the 2/3-PL, offering new insights into cost functions in human motion. This is developed in Sec. 3 after general considerations about 2/3-PL in Sec. 2.
Complementing the Lagrangian perspective, the Hamiltonian formalism provides a phase-space representation of the dynamics of a system as well as a general way to compute invariants through action-angle variables [1]. The proposed higher-derivative Lagrangians will give rise to corresponding Hamiltonian functions through Ostrogradsky’s procedure [7], after which the invariants will be computed in Sec. 4. A contextualisation of these results in the framework of motor control will then be discussed in Sec. 5.
2. Two-Thirds Law: Kinematical Considerations
In the context of three-dimensional motion in Euclidean space, the curvature and torsion of a given trajectory are obtained through the well-known formulae
where and where the symbol × stands for the usual vector product in three-dimensional space. From the above definitions, one can write
Hence, 2/3-PL is valid if the norm of the vector is constant. A sufficient condition is , implying that
The coefficient function may explicitly depend on time and on the various derivatives . Therefore, a trajectory such that satisfies (2). The simplest choice is that of a constant function , leading to elliptic trajectories. In [13], different choices of the form are explored, leading to trajectories that all comply with 2/3-PL.
Condition (6) implies that the motion is planar, so that the torsion vanishes, . Hence, non planar trajectories should not be related to (2). Although it is not the main topic of our paper, it has been proposed in [14] that the law
should hold in non-planar, three-dimensional motion, with C a positive constant. From (4) it can be deduced that . In other words, the law is valid if is constant, or
3. Dynamical Principle—Lagrangian Formalism
3.1. The Model
We propose that the actions associated with the higher derivative Lagrangians
with and , are relevant cost function candidates that may lead to trajectories satisfying (2) for any “potential" function where the variable z denotes . Note that the above Lagrangian is higher-derivative as soon as .
From the variational principle based on the action functional , the equations of motion read as follows, for a generic higher-derivative Lagrangian:
These equations have to be satisfied together with the vanishing of the boundary terms defining the momenta :
One chooses to cancel the above boundary terms by imposing the following conditions at the boundaries of the integration domain:
Since our Lagrangians do not explicitly depend on time, we will choose the initial date for convenience. More specifically, the equations of motion computed from the Lagrangian (10) are
Integrating them times leads to
in terms of constant vectors , that can be fixed by initial conditions. As we see from the right-hand side of the above equation, the Lagrangian field equations (13) lead to general solutions with a polynomial dependence on the evolution parameter, therefore signalling an instability, that is a landmark of higher-derivative models.
We see that in order to avoid any instabilities – also called run-away solutions in the context of field theory –, we have to impose the initial conditions
because then, the field equations (13) lead to the differential equation
that admits stable solutions and may imply the 2/3-PL in cases discussed below. Note that (15) only fixes conditions among the initial conditions needed to ensure a unique solution.
An equivalent way of presenting the initial conditions (15) is by first defining the vectors
and then setting the initial conditions
The point with the latter presentation of the initial conditions (15) is that, for the considered Lagrangian (10), the set of vectors , is in one-to-one correspondance with the set of momenta , , see (12). In fact, one readily sees from Lagrangian (10) and the definition (12) of the momenta that
Therefore, the choice of initial conditions (15), equivalently (18), is in turn equivalent to setting the following initial conditions on the first momenta:
To sum up the discussion, with the Lagrangian (10) and the above initial conditions , the Lagrangian field equations (13) lead to the differential equation
From this equation, one observes that the vector
remains constant during the dynamical evolution, i.e., . Conversely, from the variational equations (13) and its consequence (14), we see that imposing the condition is equivalent to imposing the initial conditions (18). Therefore, a compact way of imposing the initial conditions (18) is by imposing that .
3.2. The Case
Equations (21) and (6) obviously coincide if . In this case, the Lagrangian (10) reduces to the Flash-Handzel Lagrangian [15], i.e.,
If one imposes the initial condition , the vector is conserved since (21) now reads
The trajectories generated by any choice of U will therefore satisfy 2/3-PL.
3.3. The Case of a Linear Potential Fonction
After integrations, the equations of motions (13) reduce to
whose general solution is
with , , the other with being recursively given by
Imposing the initial conditions for all j clearly implies that for all and the dynamics reduces to elliptic trajectories without any run-away modes. Indeed, with these initial conditions the equations of motion reduce to , hence and the angular momentum is conserved, as in standard Newtonian mechanics with central forces.
3.4. The Case of a Vanishing Potential Function
In the case where one recovers the mean squared derivative cost functions of [17]
whose equations of motion are , leading to
4. Hamiltonian Formalism
4.1. Ostrogradski’s Approach
Following [7], the position degrees of freedom are defined as and the momenta are defined by (12), for . Specifically for the Lagrangian given in (10),
Then, the Hamiltonian reads
and Hamilton’s equations , lead to
On the phase-space hypersurface given by
one is led to the Hamiltonian
with being the constant norm of (22) and where, from then on, we use the notation for vectors. We recall that the conditions (41) are equivalent to (18).
The trajectory in the plane is such that constant – we use the notation although the Hamiltonian does not a priori possess the dimension of an energy. For example, in the Pais-Uhlenbeck case discussed in Sec. 3.3, the trajectory is a closed loop whose equation is given by
for .
A stability analysis of trajectories can be carried out by applying the method of [19], Chapter 7 to the Hamiltonian equations (34)–(40). The latter equations can be written under a matrix form , where is a vector containing the coordinates in phase-space and where A is a matrix. The eigenvalues of A are 0 and . The zero mode is a global translation mode. If as in the harmonic oscillator case, the nonzero eigenvalues are complex conjugated and all trajectories are bounded, global translation excepted. If , there necessarily exist unbounded trajectories even if the global translation mode is set to zero. The existence of unbounded trajectories preserving 2/3-PL is a prediction that could be experimentally studied, but that is out of the scope of this paper.
4.2. Action Variables
We now restrict our discussion to potentials U for which there exists some values of such that has two finite, distinct, solutions, leading to bounded trajectories, that will appear as closed loops in the plane where we recall the notation , idem for . In this case it is known that the action variable is a constant of motion [1]. It can be written in various ways, where one always use to parametrize the closed curve by the evolution parameter . First, by using (36),
where is the movement period. By starting from the equivalent expression and using the solution (16), equivalently (36) with (40), we obtain
For potential functions such that , we define
for future convenience.
In the Pais-Uhlenbeck case, and [19]. We also refer the reader to [20] for a discussion of action variables in the generic Pais-Uhlenbeck oscillator model. It can be expected that from the Taylor expansion It is worth pointing out that the mean squared derivative cost functions used in [17] are equal to .
5. Conclusion: First Principles Shaping Voluntary Motion
The application of Lagrangian and Hamiltonian formalisms in motor control demands a multidisciplinary approach that respects both a well-established mathematical formalism and the intricacies of human physiology. This paper proposed a broader class of higher-derivative Lagrangians that, upon defining appropriate initial conditions, lead to trajectories complying with the 2/3-PL, thus providing new insights into cost functions critical to human motion. These Lagrangians are given in Eq. (10). A salient issue for the observation of 2/3-PL is the necessity of setting accurate initial conditions: If a Lagrangian involving up to the time derivative is used, it is necessary, in order to have a bounded motion, to set the Ostrogradski momenta , with . We recall that, for the class of Lagrangians (10), the momenta are given by Eq. (31). If these initial conditions are unaligned with the natural capabilities of the human motor system, the considered Lagrangian is not qualified to model voluntary human movement. This consideration leads us to the conclusion that a minimal N is the most natural choice. Therefore we think that actions of the form
are favoured:
- They naturally lead to 2/3-PL provided one individual is able to fix the initial condition . For a motion with vanishing initial speed one only needs to impose , irrespective of the choice of potential function U .
- They may lead to a great variety of trajectories satisfying 2/3-PL according to the choice made for U. In the case of harmonic potential, elliptic trajectories are recovered, which are the best known case in which this law appears.
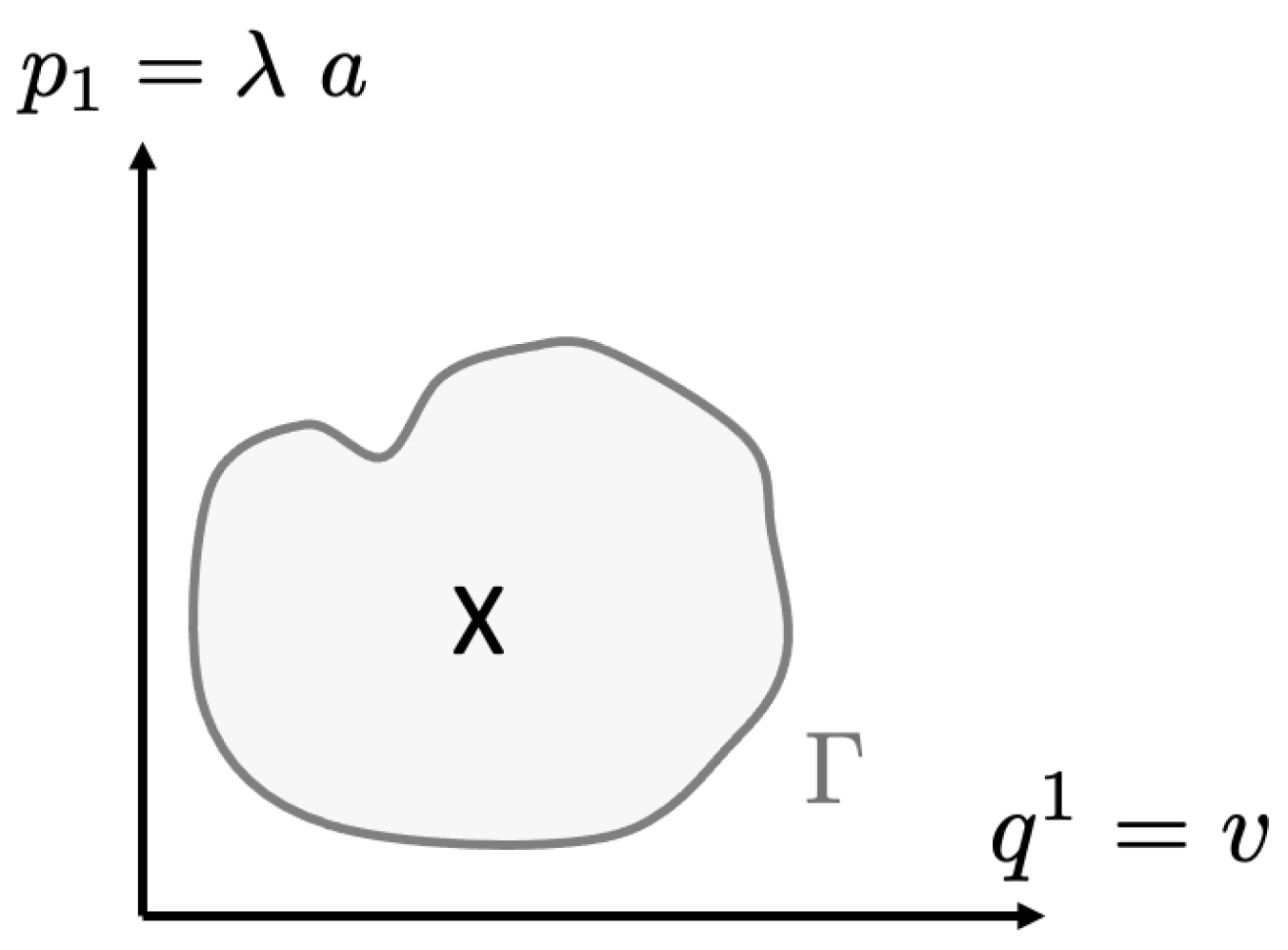
- The action variable makes explicitly appear the mean squared jerk, and it is known that minimizing this function (maximizing smoothness) is an experimentally observed principle in motor control [15]. Mechanics imposes that is constant but not necessarily minimal. However, provided is a mass scale, has the dimension of the mechanical power. Minimizing during motion is therefore a way to minimize power expenditure. Figure 1 gives a schematic representation of in this case.
Beyond the confines of the 2/3-PL, humans exhibit various stereotyped behaviours, such as bell-shaped velocity profiles [21] and adherence to Fitt’s law [22]. In the first case, the kinematics of horizontal reaching movements invariably shows a peak velocity in the middle of the trajectory, with a slight asymmetry depending on whether the movement is upward or downward [23]. These phenomena, which describe kinematic features of horizontal reaching movements and the compromise between speed and accuracy, are underpinned by the central nervous system’s capacity to maintain consistency in the face of environmental variability. Our study suggests that theoretical constructs like action variables may mirror such neural processes, serving as constants/constraints in the complex generation of human motion. The central nervous system, equipped with its intricate network of neurons and sensory receptors, plays a pivotal role in orchestrating movements. The brain, acting as the command centre, receives sensory feedback, processes it, and generates precise motor commands. It is conceivable that the brain, through its complex computations and feedback loops, sets dynamical principles and initial conditions that align with the physiological capabilities of the human body, ultimately giving rise to observed movement patterns, including the 2/3-PL.
An open challenge lies in identifying the neural correlates for these theoretical constructs. While certain brain regions responsible for sensory processing are well-understood, those involved in integrating multimodal sensory information to estimate physical forces like gravity remain less defined [24]. Moreover, the potential role of the brain and nervous system in shaping appropriate initial conditions and motor control strategies is a crucial aspect of our proposal that remains to be elucidated. This not only affects the trajectories described by our mathematical models but also fundamentally influences the very ability of these models to mirror real human movement.
As a last comment we note that 2/3-PL and minimal jerk, that are closely linked within our framework, are not the only proposed models to describe voluntary motion. Let us consider Lagrangian (47) in which the position degree of freedom is actually an angular degree of freedom describing a circular motion in a plane, i.e., a circular motion restricted to a single constant axis of rotation. In this case the movement would tend to minimize , in which is the angular acceleration. By virtue of Euler equation with a single rotation axis, with M the external torque applied on the considered body and . This is a simplified version of the minimal torque-change model [25], suggesting that voluntary human motion minimizes the rate of change of total external torque. This last comment suggests that, beyond 2/3-PL, the integration of Lagrangian and Hamiltonian formulations of mechanics may fit within a general motor control model of voluntary motion encompassing several kinds of cost functions.
Author Contributions
Conceptualization, N.B., F.B., O.W., F.D.; formal analysis, N.B., F.B.; writing–original draft preparation, N.B., F.B., .O.W., F.D. writing–review and editing, N.B., F.B., F.D., O.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Landau and E. Lifchitz. Physique théorique Tome 1 : Mécanique. E. MIR, Moscow, 1988.
- C.S. Sherrington. The integrative action of the nervous system. C Scribner and Sons, New York, 1906.
- Emanuel Todorov and Michael I. Jordan. Optimal feedback control as a theory of motor coordination. Nature Neuroscience 2002, 5, 1226–1235. [CrossRef] [PubMed]
- Emanuel Todorov. Optimality principles in sensorimotor control. Nature Neuroscience 2004, 7, 907–915. [CrossRef]
- Sivakumar Balasubramanian, Alejandro Melendez-Calderon, Agnes Roby-Brami, and Etienne Burdet. On the analysis of movement smoothness. Journal of NeuroEngineering and Rehabilitation 2015, 12, 112.
- Emanuel Todorov and Michael I. Jordan. Smoothness maximization along a predefined path accurately predicts the speed profiles of complex arm movements. Journal of Neurophysiology 1998, 80, 696–714. [CrossRef] [PubMed]
- Ostrogradsky. Mémoires sur les équations différentielles, relatives au problème des isopérimètres. Mem. Acad. St. Petersbourg 1850, 6, 385–517.
- Francesco Lacquaniti, Carlo Terzuolo, and Paolo Viviani. The law relating the kinematic and figural aspects of drawing movements. Acta Psychologica 1983, 54, 115–130. [CrossRef] [PubMed]
- Myrka Zago, Adam Matic, Tamar Flash, Alex Gomez-Marin, and Francesco Lacquaniti. The speed-curvature power law of movements: a reappraisal. Experimental Brain Research 2018, 236, 69–82. [CrossRef] [PubMed]
- Dongsung Huh and Terrence, J. Sejnowski. Spectrum of power laws for curved hand movements. Proceedings of the National Academy of Sciences 2015, 112, E3950–E3958. [Google Scholar]
- Matan Karklinsky and Tamar Flash. Timing of continuous motor imagery: the two-thirds power law originates in trajectory planning. Journal of Neurophysiology 2015, 113, 2490–2499. [CrossRef] [PubMed]
- Charalambos Papaxanthis, Christos Paizis, Olivier White, Thierry Pozzo, and Natale Stucchi. The relation between geometry and time in mental actions. PLOS ONE 2012, 7, 1–9.
- Adam Matic and Alex Gomez-Marin. Geometric purity, kinematic scaling and dynamic optimality in drawing movements beyond ellipses. Journal of Mathematical Psychology 2020, 99, 102453. [CrossRef]
- Frank E. Pollick, Uri Maoz, Amir A. Handzel, Peter J. Giblin, Guillermo Sapiro, and Tamar Flash. Three-dimensional arm movements at constant equi-affine speed. Cortex Special Issue on "Cognitive Neuroscience of Drawing". 2009, 45, 325–339. [CrossRef] [PubMed]
- Tamar Flash and Amir A. Handzel. Affine differential geometry analysis of human arm movements. Biological Cybernetics 2007, 96, 577–601. [CrossRef]
- A. Pais and G. E. Uhlenbeck. On Field theories with nonlocalized action. Phys. Rev. 1950, 79, 145–165. [CrossRef]
- Magnus J. E. Richardson and Tamar Flash. Comparing smooth arm movements with the two-thirds power law and the related segmented-control hypothesis. Journal of Neuroscience 2002, 22, 8201–8211. [CrossRef] [PubMed]
- T. Flash and N. Hogan. The coordination of arm movements: an experimentally confirmed mathematical model. J. Neurosci 1985, 5, 1688–1703. [CrossRef]
- Jorge, V. José and Eugene J. Saletan. Classical Dynamics. A contemporary approach, 1998. [Google Scholar]
- N. Boulanger, F. Buisseret, F. Dierick, and O. White. Higher-derivative harmonic oscillators: stability of classical dynamics and adiabatic invariants. Eur. Phys. J. 2019, C79, 60.
- CG Atkeson and JM Hollerbach. Kinematic features of unrestrained vertical arm movements. Journal of Neuroscience, 1985; 5, 2318–2330.
- P. M. Fitts. The information capacity of the human motor system in controlling the amplitude of movement. Journal of Experimental Psychology 1954, 47, 381–391. [CrossRef]
- C. Papaxanthis, T. Pozzo, K. E. Popov, and J. McIntyre. Hand trajectories of vertical arm movements in one-g and zero-g environmentsevidence for a central representation of gravitational force. Experimental Brain Research 1998, 120, 496–502. [CrossRef]
- A. C. Stahn, D. Bucher, P. zu Eulenburg, P. Denise, N. Smith, F. Pagnini, and O. White. Paving the way to better understand the effects of prolonged spaceflight on operational performance and its neural bases. npj Microgravity 2023, 9, 59. [CrossRef] [PubMed]
- Y. Uno, M. Kawato, and R. Suzuki. Formation and control of optimal trajectory in human multijoint arm movement. Biological Cybernetics 1989, 61, 89–101. [CrossRef] [PubMed]
Figure 1.
Typical phase-space plot of a bounded trajectory for . The action variable is the area of . The cross marks the average and on the loop .
Figure 1.
Typical phase-space plot of a bounded trajectory for . The action variable is the area of . The cross marks the average and on the loop .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



