
Submitted:
20 September 2024
Posted:
20 September 2024
You are already at the latest version
Abstract
The high thrust linear motor used for electromagnetic launch is switched with the anti-shunt thyristor as the switch. During the switching process, different current path states will appear, which will lead to changes in motor parameters and current fluctuation. Aiming at the air-core synchronous linear motor with parallel and series power supply, this paper analyzes the change of current path caused by the change of trigger signal of anti-parallel thyristor in the process of sectionalized stator switching. The motor circuit model of the switching process is derived. A new sectionalized stator switching method is proposed to realize the smooth switching of the sectionalized stator powered linear motor. Finally, the correctness of the analysis and modeling is verified by simulation, and the effectiveness of the sectionalized stator switching method is tested by using the test prototype.
Keywords:
High thrust linear motor
; Sectionalized stator
; Section switch
; Anti-parallel thyristor
; Current zero-crossing switching
1. Introduction
Linear motor is a device that can directly convert electrical energy into linear mechanical energy. Compared with the device of rotary motor and transmission mechanism to achieve linear traction, the device of linear motor to achieve linear traction has no transmission mechanism, and the secondary does not need auxiliary power supply, which has the advantages of simple structure, large traction force and high reliability [1]. Therefore, the long stator linear motor has been widely used in the scene with long distance traction requirements, such as linear elevator, logistics transmission, magnetic train traction and car crash tests, and can also be used in electromagnetic sled, electromagnetic rail gun, electromagnetic range extender, electromagnetic catapult and other special occasions [2].
In order to reduce the circuit loss during operation, reduce the output voltage level of the inverter, and improve the system efficiency, the long stator is often sectioned. When the mover moves to the adjacent sectionalized stator, the stator is supplied with power, and other sectionalized stators are not energized. The switching methods of the traction system of the high-speed maglev train are jump step method, two step method and three step method and others. The disadvantage of the jump method is that there is a loss of thrust during switching [3], the two-step method requires the inverter current to drop to zero and then increase when switching [4], and the time to switch is long, the three-step method requires three inverters, and one inverter will be idle in the non-step-changing during switching, which increases the cost [5,6]. The length of the sectionalized stators of the traction system of the maglev train is dozens of times the length of the mover [7]. In the field of high-thrust high-speed traction, in order to achieve a large traction current while maintaining a small power supply voltage, the length of the sectionalized stators is generally short, and the length of the sub-segment is 0.3 to 10 times according to application scenarios [8], Therefore, the switching method of high-speed maglev traction system is not applicable.
The sectionalized switch is the key part of the sectionalized linear motor. The stator segment is electrified according to the mover position by switching different sectionalized switches to realize the continuous traction of the mover. In [9], Huang uses a solid-state relay as a section switch, and uses a single power supply of 380V/50hz to achieve continuous operation of the linear motor; In [10], The linear motor uses IGBT as section switch, with the maximum working current of 25.3A and rated voltage of 220V. In the application of high-power linear traction represented by electromagnetic ejection, the stator current can reach 18KA and the voltage can reach 4kV [11], moreover, the coupling time between the rotor and each stator is very short, which requires the controllable, reliable and fast turn-on and turn-off of the section switch. Because thyristor has the characteristics of high switching frequency, strong pressure bearing and circulation ability, anti-parallel thyristor is often used as the sectional switch of long stator linear motor [12,13,14].
The number of sectionalized stators supplied by linear motor at the same time is determined by the relationship between sectionalized stators length and mover length. When the mover length is shorter than the length of the sectionalized stators, two adjacent sectionalized stators are supplied at the same time; When the actuator length is between m-1 sectionalized stators length and m sectionalized stators length, m+1 adjacent stator is generally supplied at the same time (m=1, 2...) [8]. For example, the mover is shorter than the section switch. Figure 1 shows its structure diagram, this moment, the position sensor detects that the mover locate in the sectionalized stator n, the switch controller sends commands that only the section switch n and the section switch n+1 turn on. When the mover completely enters the sectionalized stator n+1, the switch controller sends commands that only the section switch n+1 and the section switch n+2 turn on, and so on [2]. There are two traditional switching methods: (1) after the mover enters the stator section n+1, turn off section switch n and then turn on the section switch n+2 [13], (2) after the mover enters the stator section n+1, turn on section switch n+2 first, and then turn off the section switch n [15]. Both methods have the problems of current control degree of freedom change, current fluctuation and current shock during switching, so additional current control methods are needed to improve current tracking speed. References [16] reduces the current shock during switching by 50% through optimizing the switching angle and switching sequence. In [17], Active disturbance rejection control and load power feedforward are used to improve current response speed and reduce bus voltage fluctuation. In [18], the thrust control based on the sum of current and the subdivision disturbance suppression based on the difference of current are used to reduce the motor thrust fluctuation during stator sections switching. When the motor is running at high current, the switching of the switch will lead to the vibration of the winding cable. To mitigate vibration issues arising from segment switch operations, incorporating elastic vibration isolation elements proves to be an effective strategy for attenuating these vibrational effects [19].
Current zero-crossing switching is an important method to reduce current fluctuation during switching of segmented linear motor. Patent [20] proposes to use a fixed threshold to determine current zero-crossing and use it for stator sections switching. In [1], according to the position of the mover and the current zero-crossing to switch section switches, the maximum fluctuation of motor torque current component is only 9%. In [20], the "mathematical-physical" model of thyristor switch is established and used to analyze the influence of stator sections switching transient process, the model is verified on a linear motor with single power supply in series which adopt current zero-crossing switching. References [8] proposes that when switching, each phase switches of stator section n are turned off at the current zero-crossing point and the corresponding phase switches of stator section n+2 are turned on at the same time, which can reduce the current fluctuation without changing the degree of freedom of current control. All the above studies mentioned current zero-crossing switching, but did not analyze the necessity of current zero-crossing.
This paper analyzes the circuit changes of linear motor stator section switching process with single power supply, deduces the motor circuit model during switching, analyzes the causes of current fluctuation and shock, and obtains the necessity of switching when the current zero-crossing. Aiming at the problem of imprecision and misjudgment of current zero-crossing point by fixed threshold method when the linear motor is running at high speed and the traction current is irregular, a zero-crossing point detection method based on control period and current frequency is proposed and used for stator segment switching, so that the timing of switch action is closest to the real current zero-crossing point which can ensure the smooth transition of current during switching. The correctness of the analysis is verified by simulation, the effectiveness of the method is verified by simulation and large thrust linear motor testing machine.
2. Analysis of Sectionalized Stator Switching Process
The circuit topology of single-supply sectionalized linear motor with stator longer than mover is shown in Figure 2. The three-phase current of the motor is controlled independently, and each phase current differs by 120 degrees. Each section switch consists of three pairs of anti-parallel thyristors, each pair of anti-parallel thyristors is responsible for a phase circuit of a single stator section, the on-off of each pair of anti-parallel thyristors is determined by the same gate trigger signal. As a semi-controlled power electronic device, the thyristor is turned on under the condition that the trigger signal is applied to the gate and the anode bears the direct voltage. The thyristor can be turned off when the gate trigger signal is removed and the current is zero. When the linear motor is running, the continuous high-frequency trigger signal is applied only to the anti-parallel thyristor of the section switches that needs to be turned on.
Because the motor circuit is an inductive load, the phase voltage of the stator is ahead of the phase current, and there are two situations when section switches switching: (1) the bus voltage and current are in the same direction; (2) the bus voltage and current are reversed. Taking the A-phase circuit as an example, this paper analyzes the circuit change process and current flow during switching, and the same applies to phase B and C switching.
2.1. Switching Process Of Sectionalized Stator Paralleled Power Supply
When a linear motor is powered by a single power supply in parallel, taking the mover running in the stator segment n-1 as an example, at this time, continuous high-frequency trigger signals are applied to the section switches n-1 and n to keep them conductive. The equivalent circuit of the single phase of the motor is shown in Figure 3.
2.1.1. Parallel Connection Switching When Voltage and Current in Same Direction
After the mover completely enters the stator section n from the stator section n-1, the switching process begins. The trigger signal of the section switch n-1 is immediately turned off, and the trigger signal of the section switch n+1 is applied at the same time. If the current is at a positive half wave when the trigger signal changes and the bus voltage is in the same direction as the current, the change process of phase A circuit of the motor and the change of current flow direction are shown in Figure 4a, Figure 4b shows the switching state of the thyristor in n-1, n and n+1 stator section, where 0 means off and 1 means on. Analogical analysis of current in negative half-wave.
The stator sections switching process is as follows:(1) Before switching, the stator section n-1 and n are connected in parallel with the forward thyristor of section switch n-1 and section switch n; (2) At time t1, the trigger signal of the section switch n-1 is removed and the trigger signal is applied to the section switch n+1, stator section n+1 is electrified through forward thyristor, stator section n-1,n and n+1 are connected in parallel by forward thyristors; (3) The bus voltage is opposite to the current at a certain time in the t1-t2 period; (4) At t2, the winding current in stator section n+1 crosses zero, and the reverse thyristor in section switch n+1 is turned on, stator section n-1,n and n+1 are connected in parallel; (5) At a certain time in the t2-t3 period, the bus current crosses zero, and the current direction remains unchanged in stator section n-1, n, and n+1; (6) At t3, the winding current of stator section n-1 and n return to zero, section n-1 is no longer energized, stator section n and n+1 are connected in parallel, switching process complete.
2.1.2. Parallel Connection Switching When Voltage and Current in Reversed Direction
If the bus voltage is opposite to the current direction before switching, the change process of phase A circuit of the motor and the change of current flow direction are shown in Figure 5a, Figure 5b shows the switching state of the thyristor in n-1, n and n+1 stator section.
The stator sections switching process is as follows:(1) Before switching, the stator section n-1 and n are connected in parallel with the forward thyristor of section switch n-1 and section switch n, but the bus current and voltage are in the reversed direction; (2) At t1, the trigger signal of the section switch n-1 is removed and the trigger signal is applied to the section switch n+1, stator section n+1 is electrified through reversed thyristor, stator section n-1,n and n+1 are connected in parallel; (3) The bus current crosses the zero point at a certain time in the t1-t2 period; (4) At t2, the winding current of stator section n-1 and n return to zero, section n-1 is no longer energized, stator section n and n+1 are connected in parallel, switching process complete.
2.2. Switching Process Of Sectionalized Stator Connected in Series
When a linear motor is powered by a single power supply in series, also taking the mover running in the stator segment n-1 as an example, continuous high-frequency trigger signals are applied to the section switches n-1 and n to keep them conductive. The equivalent circuit of the single phase of the motor is shown in Figure 6.
2.2.1. Series Connection Switching When Voltage and Current in Same Direction
The switching method of series power supply is the same as the parallel power supply. Taking the positive half-wave current as the example, analogical analysis of current in negative half-wave, when the trigger signal changes, the bus voltage and current are in the same direction. The change process of phase A circuit of the motor and the change of current flow direction are shown in Figure 7a, Figure 7b shows the switching state of the thyristor in n-1, n and n+1 stator section.
The stator sections switching process is as follows:(1) Before switching, the stator section n-1 and n are connected in series with the forward thyristor of section switch n-1 and section switch n; (2) At time t1, the trigger signal of the section switch n-1 is removed and the trigger signal is applied to the section switch n+1, stator section n+1 is electrified through forward thyristor, stator section n-1 and n+1 are connected in parallel first and then in parallel with n; (3) The bus voltage is opposite to the current at a certain time in the t1-t2 period, the voltages of section n-1 is opposite; (4) At t2, the winding current in stator section n+1 crosses zero, and the reverse thyristor in section switch n+1 is turned on; (5) At t3, section switch n is turned on, the current direction of stator section n turn negative; (6) At t4, the winding current of stator section n-1 return to zero, section n-1 is no longer energized, stator section n and n+1 are connected in series, switching process complete.
2.2.2. Series Connection Switching When Voltage and Current in Reversed Direction
If the bus voltage is opposite to the current direction before switching, the change process of phase A circuit of the motor and the change of current flow direction are shown in Figure 8a, Figure 8b shows the switching state of the thyristor in n-1, n and n+1 stator section.
The stator sections switching process is as follows:(1) Before switching, the stator section n-1 and n are connected in series with the forward thyristor of section switch n-1 and section switch n, but the bus current and voltage are in the reversed direction; (2) At t1, the trigger signal of the section switch n-1 is removed and the trigger signal is applied to the section switch n+1, stator section n+1 is electrified through reversed thyristor; (3) At t2, the bus current crosses zero, and the reverse thyristor in section switch n is turned on; (4) At t3, the winding current of stator section n-1 return to zero, section n-1 is no longer energized, stator section n and n+1 are connected in series, switching process complete.
3. Model of Sectionalized Stator Switching Process
Based on the analysis of phase-A stator section winding switching process and the changes in the phase-A circuit of the motor in Chapter 2, a model of the complete stator section switching process of the motor can be established.
When the stator of the air-core synchronous linear motor is not sectionalized, the voltage equation can be expressed as:
Where is three-phase voltage and is three-phase current of the stator; is three-phase flux linkage of the stator; is self-inductance of three-phase windings; when the mover is consisted of superconducting coils, is the current in the coils, is mutual inductance between the coil and the three-phase windings; when the mover is consisted of permanent magnet, is equivalent current in permanent magnet, is mutual inductance between the three-phase windings and equivalent coil of permanent magnet; is mutual inductance between phase A and B, is mutual inductance between phase C and A, other mutual inductance parameters are defined in the same way.
Due to the absence of an iron core's influence, the self-inductance and the mutual inductance of stator winding are constant, regardless of the mover position. When the three-phase winding is symmetrical, it can be considered that
Equation (1) can be expressed as equation (4), whereis inductance of each phase winding,
When the stator is segmented, equation (4) can represent the voltage-current relationship of the stator section winding coupled with the mover, the voltage-current relationship of the stator sections winding not coupled with the mover is as follows
where is the three-phase voltage and, 、、 is the three-phase current of uncoupled winding
3.1. Switching Process Model Of Sectionalized Stator Paralleled Power Supply
Modeling the process of switching, while stator section n-1 and n powered switch to stator section n and n+1 powered. Switch the stator winding in the order of phase A, phase B and phase C. Before switching, the voltage-current relationship can be expressed as:
where 、、is inverter outputs three-phase voltage, 、、is inverter outputs three-phase current, is the phase A current of stator section n-1, is the phase B current of stator section n, other currents are defined in the same way.
After the trigger signal of A-phase switches act, phase A winding of stator section n+1 access circuit, the voltage-current relationship can be expressed as:
While phase A switching is completed, the trigger signal of B-phase switches act, phase B winding of stator section n+1 is powered, the voltage-current relationship can be expressed as:
While phase B switching is completed, the trigger signal of C-phase switches act, phase C winding of stator section n+1 is powered, the voltage-current relationship can be expressed as:
After phase C switching is completed, the switching process is completed, the voltage equation can be expressed as equation (10), until next switching process.
From equation (7-9), segmented linear motor powered by parallel connection, have sudden change of motor circuit parameters during switching which is related to both winding self-inductance and mutual inductance. If that influence of mutual inductance is ignored, Z represents the winding impedance of each phase winding of each stator section before switching. In normal operation, the circuit impedance is, after the trigger signal of the phase switches act, next winding access circuit, the circuit impedance turns to, the impedance suddenly decreased by 33.3%, which causes the current to fluctuate greatly.
If the winding current of n-1 section is about to zero when the switch acts, after the switch acts, is equal to 0, stator section n-1 winding is no longer powered, and stator section n+1 winding can be turned on immediately, the sudden change of circuit parameters is only related to the mutual inductance of windings, the current fluctuation will be small while stator section switching.
3.2. Switching Process Model Of Sectionalized Stator Series Power Supply
When stator sections adopt series power supply mode, the switching method is consistent with the parallel power supply mode, the motor circuit model of switching process is as follows. Before switching, the voltage-current relationship can be expressed as:
After the trigger signal of A-phase switches act, phase A winding of stator section n+1 access circuit, the partial voltage of phase A stator section n-1 winding and n winding suddenly change, the current relation is not satisfied ,,the voltage-current relationship can be expressed as:
While phase A switching is completed, the trigger signal of B-phase switches act, phase B winding of stator section n+1 is powered, the voltage-current relationship can be expressed as:
While phase B switching is completed, the trigger signal of C-phase switches act, phase C winding of stator section n+1 is powered, the voltage-current relationship can be expressed as:
After phase C switching is completed, the switching process is completed, the voltage equation can be expressed as equation (15), until next switching process.
From Equation (12-14), segmented linear motor powered by series connection, also have sudden change of motor circuit parameters during switching If that influence of mutual inductance is ignored, Z represents the winding impedance of each phase winding of each stator section before switching. In normal operation, the circuit impedance is, after the trigger signal of the phase switches act, next winding access circuit, the circuit impedance turns to, the impedance suddenly decreased by 25%, which cause the current to fluctuate greatly.
Same as parallel power supply, if stator sections switching is at current zero-crossing point, the current fluctuation will be small.
4. Current Zero-Crossing Switching Method
From the analysis in Chapter 2 and the modeling in Chapter 3, whether the segmented linear motor adopts series power supply or parallel power supply, stator sections switching at current zero-crossing point minimize current fluctuation. But when controlling the motor, the sampling of current is discrete. actual current zero-crossing point may not be collected, the judged zero-crossing point can only be as close as possible to the actual current zero crossing.
4.1. Current Zero-Crossing Switching Method By Fixed Threshold
At present, the mainstream method is using the fixed threshold method to determine the current zero-crossing point, and change the switch trigger signal at the point. This method sets a fixed threshold y, and takes the first current sampling point entering the threshold as the current zero-crossing point. When equation (16) is satisfied, can be judged as current zero-crossing point. Where is the k-th sampling time,is the k-th sampling current, is the (k-1)-th sampling current.
Letbe the current sampling frequency.is the current frequency of windings,is the current amplitude of windings. In order to ensure that at least one sampling point can be within the threshold range every half current period, the threshold should meet the conditions that.When the linear motor is running, the threshold is determined by the maximum current frequency. For linear motors with large thrust and acceleration, the current frequency changes rapidly and the frequency changes widely. When the current frequency is low, the current zero-crossing point determined by the fixed threshold method is not the optimal point. As shown in Figure 9, the frequency of phase A current increases from 0hz to 325Hz in 2.7s, the threshold is set to 710. At 2.5s, the current frequency is about 300Hz, current zero-crossing point can be judged accurately; but at 0.5s, the current frequency is about 50Hz, the judged zero-crossing point is not the closest point to the actual zero-crossing point.
When the mover needs suspension traction, the motor needs both traction current and steering current, so that the bus current may be irregular, which is shown in Figure 10. When the current repeatedly crosses the threshold, it may lead to misjudgment of zero-crossing point. Switching at the misjudged point will lead to the half-cycle time of winding parallel connection, which leads to inverter output large current fluctuation.
4.2. Improved Current Zero-Crossing Switching Method.
Aiming at two shortcomings of fixed threshold switching method, this paper proposes a new zero-crossing switching method. First, setas the reference zero-crossing point, which satisfy equations (17) and (18) when the current is in the negative half cycle and the positive half cycle respectively. The reference zero-crossing point is reset every time the current crosses the zero point, which is used to judge the current zero-crossing point next time.
Starting from the reference zero-crossing point, when the motor is accelerated, let set
When point satisfies the conditional formula (20), if ,is the zero-crossing point of negative half cycle; if ,is the zero-crossing point of the positive half cycle. The i-th sampling after the reference zero-crossing expressed as,represents the sampling frequency of this point, represents the current value at this point. The current frequency of the air-core synchronous linear motor can be obtained from formula , whererepresents the velocity of the mover,represents the stator polar distance.
When the motor decelerates or runs at a uniform speed. It is set
When point satisfies the conditional formula (22), if,is the zero-crossing point of negative half cycle; if,is the zero-crossing point of the positive half cycle.
When the current waveform is regular, the effect of the improved zero-crossing switching method is shown in Figure 11.
When the current waveform is seriously irregular, this method can also determine the current zero-crossing point without misjudgment. Which is shown in Figure 12.
5. Simulation and Experimental Verification
5.1. Simulation Verification
To validate the analyzes of stator sections switching process in this paper, numerical simulations are carried out as follows: the propulsion system is an air-core synchronous linear motor. First, a constant frequency voltage is applied to the motor circuit to verify whether the circuit changes in stator sections switching are the same as the analysis in the first chapter; Then control is added to simulate the switching of the motor during the acceleration from zero to 170m/s to verify the effectiveness of motor modeling and the proposed zero-crossing switching method. The nominal parameters are shown in Table 1.
5.1.1. Verification Of Stator Section Switching Process
Parallel connection and series connection are respectively adopted, the current of stator section switching at a certain switching time is obtained by simulation. When the stator section windings are connected in parallel, the amplitude of sine voltage output by inverter is 1000V and the frequency is 60Hz. Because the three-phase switching process is the same, only the situation of A-phase positive half-wave switching is presented. The voltage-current relationship during switching is shown in Figure 13.
When the windings are connected in series, the amplitude of sinusoidal voltage output by the inverter is 2000V and the frequency is 60Hz. Only the situation of A-phase positive half-wave switching is presented. The voltage-current relationship during switching is shown in Figure 14.
As can be seen from Figure 13 and Figure 14, the change of winding circuit in the process of stator sections is consistent with the analysis in Chapter 1. When series power supply is adopted, after the switch trigger signal is activated, winding of stator section n-1 and n+1 are connected in parallel and then connected in series with stator section n. At this time, the winding voltage of stator section n-1 suddenly decreases by about 1/3. After n-1 section winding is disconnected, the winding voltage of n+1 section suddenly increases by about 1/2, which is consistent with the analysis.
5.1.2. High Thrust Motor Stator Section Switching Simulation
The simulation parameters of segmented linear motor are the same as those in Table 1. The inverter employs a cascaded H-bridge topology, with the chopping frequency established at 1 kHz and both the control and sampling frequencies set to 10 kHz. The current loop is regulated using PID control. The mover object uses superconducting parameters and the accelerate of mover is 8g. The motor moves 15.408 meters for each pulse signal generated, and a stator section switch is performed after receiving each pulse signal. The highest running speed of the motor is 170m/s, and the highest current frequency is 158Hz.
When the fixed threshold method is used for stator section switching, the current waveform is shown in Figure 15.
The current waveform using the current zero-crossing switching method proposed in this paper is shown in Figure 16.
From Figure 15 and Figure 16, it can be seen that when the fixed threshold method is used to switch, the current fluctuations during switching become obvious as the current frequency increases. When the switching is performed using the method proposed in this paper, the current fluctuations during switching are smaller. The amplitude of the line current diminishes as the frequency of the current is increased, due to the constraints imposed by the inverter's output capacity.
5.2. Experimental Verification
The proposed stator section switching algorithm is verified by using a 32m long thrust linear motor built in the laboratory. The main components of the motor are shown in Figure 17, motor parameters are the same as Table 1. The motor stator is divided into three sections and is connected with that output bus of the inverter in a series mode. The motor is connected to the first and second stator section in series before 16m, and the second and third stator section are connected in series after 16m.
Using superconductor mover, the motor runs in constant thrust mode with a current of 2000A and 3300A. The fixed threshold switching method and the switching method proposed in this paper are used for stator section switching under two working conditions respectively. The test current is shown in Figure 18 and Figure 19.
From the test results, the switching method proposed in this paper significantly reduces the fluctuation of current during the stator sections switching of large thrust segmented linear motor, and the proposed method is effective.
6. Conclusions
This paper addresses the issue of current fluctuations during the stator sections switching process of a segmented linear motor powered by a single power supply. It analyzes the changes in the circuit of the energized winding during the stator sections switching process for both parallel and series power supply modes. Then establishes switching models for the two power supply modes, and finally proposes a current zero-crossing switching method suitable for fast-changing current frequencies. Simulation results show that the analysis and modeling of the switching process are correct, and experimental results show that the switching process current fluctuations are significantly reduced when the current zero-crossing switching method proposed in this paper is used.
The analysis and modeling of the stator sections switching process for linear motors powered by a single supply are relevant to the majority of linear motor applications. The proposed current zero-crossing method for stator sections switching is also broadly applicable to segmented linear motors, particularly in scenarios characterized by significant and rapid fluctuations in current frequency, as well as irregular current waveforms during operation.
Author Contributions
Conceptualization, X.L. and L.W.; methodology, X.L and J.L.; software, X.L and M.Q.; validation, X.L., M.Q.; formal analysis, X.L.; investigation, X.L and D.Z.; resources, X.L and Q.C.; data curation, X.L.; writing—original draft preparation, X.L.; writing—review and editing, M.Q. and L.W.; visualization, X.L.; supervision, D.Z. and J.L.; project administration, J.L and L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Project for Postgraduate Innovation Ability Training Subsidy of Hunan Province Education Department (XJJC2024017) and Postgradu-ate Technology Innovation Program of Hunan Provinceunder Grant (No.CX20240124).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, M.; Ma, W.M.; Xu, X.H.; et al. A block feeding strategy for linear motor considering switching at current-crossing point. Journal of Naval University of Engineering 2019, 31, 11–16. [Google Scholar]
- Zhang, M.; Ma, W.; He, N. Application of block feeding methods in long primary linear motors. Proceedings of the CSEE 2013, 33, 96–104. [Google Scholar]
- Zhang, Q.; Lin, F.; You, X.; et al. A Novel Stator Section Crossing Method of Long Stator Linear Synchronous Motor for Maglev Vehicles[C]//2006 CES/IEEE 5th International Power Electronics and Motion Control Conference. IEEE, 2006, 3: 1-5.
- Sun, X.; Shi, L.M.; Zhang, Z.H.; Li, Y.H. Analysis on the Commutation Method of Segmented Supply for Double-Sided Induction Linear Motor[C]. Proceedings of the 2015 National Academic Annual Conference on Linear Motors, Jinan, 2015: 56-60.
- Zou, Z.; Zheng, M.; Lu, Q. Modeling and simulation of traction power supply system for high-speed maglev train. World Electric Vehicle Journal 2022, 13, 82. [Google Scholar] [CrossRef]
- Dong, H.J. Design and Implementation of the Traction Power Supply System for Wolong Maglev Test Line[D]. Zhejiang University, 2017.
- Peng, K.S.; Ge, Q.X.; Wang, X.W. Traction control strategy of high-speed maglev train based on hardware-in-the-loop real-time simulation platform. Transactions of China Electrotechnical Society 2020, 35, 3426–3435. [Google Scholar]
- Liu, J.H.; Shi, L.M.; Guo, K.Y. A Switch Method to Suppress the Current Fluctuation for Segmented Powered Linear Motor. Proceedings of the CSEE 2024, 44, 1576–1586. [Google Scholar] [CrossRef]
- Huang, Y.G. Design and Implementation of the Power Supply System for High-Temperature Superconducting Maglev Launch Device[D]. Chengdu: Southwest Jiaotong University, 2007.
- Li, H.; Li, T.; Wang, F.Z.; Jiao, L.C. A Control Device for Use with an Elevating System of Permanent Magnet Linear Synchronous Motors Based on IGBT. Industrial Instrumentation & Automation Devices.
- Meeker, D.C.; Newman, M.J. Indirect vector control of a redundant linear induction motor for aircraft launch. Proceedings of the IEEE 2009, 97, 1768–1776. [Google Scholar] [CrossRef]
- Wei, J.; Liu, X.; Li, Z.; et al. Study on differential mode conducted interference of trigger circuit of high-power thyristors in pulsed power supply[C]. Journal of Physics: Conference Series. IOP Publishing 2020, 1507, 072007. [Google Scholar] [CrossRef]
- El-Bolok, H.M. A microprocessor-based novel scheme for constant angle triggering of thyristors under a variable frequency anode supply. IEEE Transactions on Industrial Electronics 1987, 471–474. [Google Scholar] [CrossRef]
- Bo, L.H. Research on the Application of Thyristors in Pulsed Power Sources[D]. Huazhong University of Science and Technology, 2009: 69.
- Zhu, H. Research on Key Technologies of Drive Control System for Winding-Segmented Permanent Magnet Linear Synchronous Motor[D]. Huazhong University of Science and Technology, 2015: 69.
- Deng C, Xu F, Zhao C, et al. Switching Current Impact Reduction Method for Segmented Power Supply Linear Motor[C]//IECON 2022–48th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2022: 1-6.
- Zhu, J.Q.; Ge, Q.X.; Wang, X.W. Control strategy for PWM rectifier of high-speed maglev based on active disturbance rejection control and load power feed-forward. Transactions of China Electrotechnical Society 2021, 36, 320–329. [Google Scholar]
- Sepe Jr R, B. Block switching transient minimization for linear motors and inductive loads:. U.S. Patent 7,969, 103.
- Qu, M.; Yang, Q.; Wu, S.; et al. Analysis of super-harmonic resonance and periodic motion transition of fractional nonlinear vibration isolation system. Journal of low frequency noise, vibration, and active control. 2023, 42, 771–788. [Google Scholar] [CrossRef]
- Ma, M.Z.; Ma, W.M.; Fan, H.L. Switch transient process of section powered long-primary linear induction motor. Electric Machines and Control 2015, 19, 1–7. [Google Scholar]
Figure 1.
Schematic diagram of linear motor which mover shorter than stator sections.
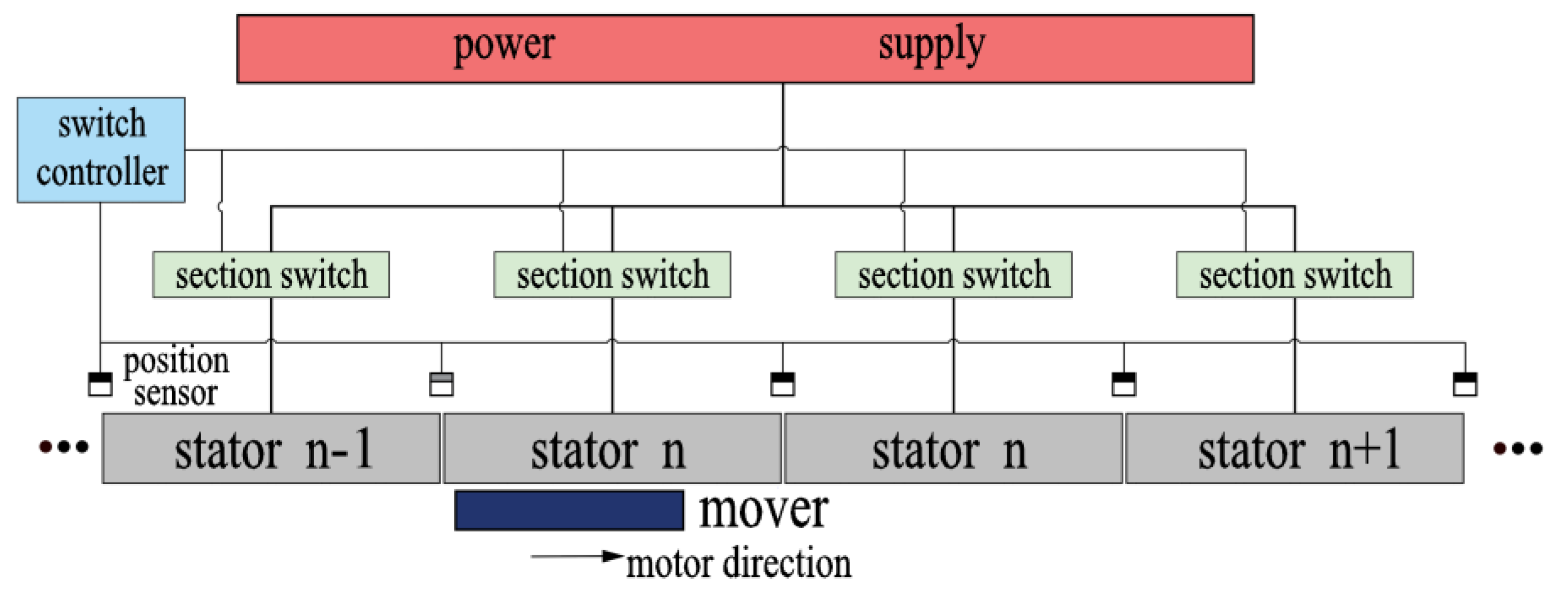
Figure 2.
Sectionalized linear motor single power supply circuit topology: (a) Sectional stator parallel power supply topology; (b) Sectional stator series power supply topology.
Figure 2.
Sectionalized linear motor single power supply circuit topology: (a) Sectional stator parallel power supply topology; (b) Sectional stator series power supply topology.
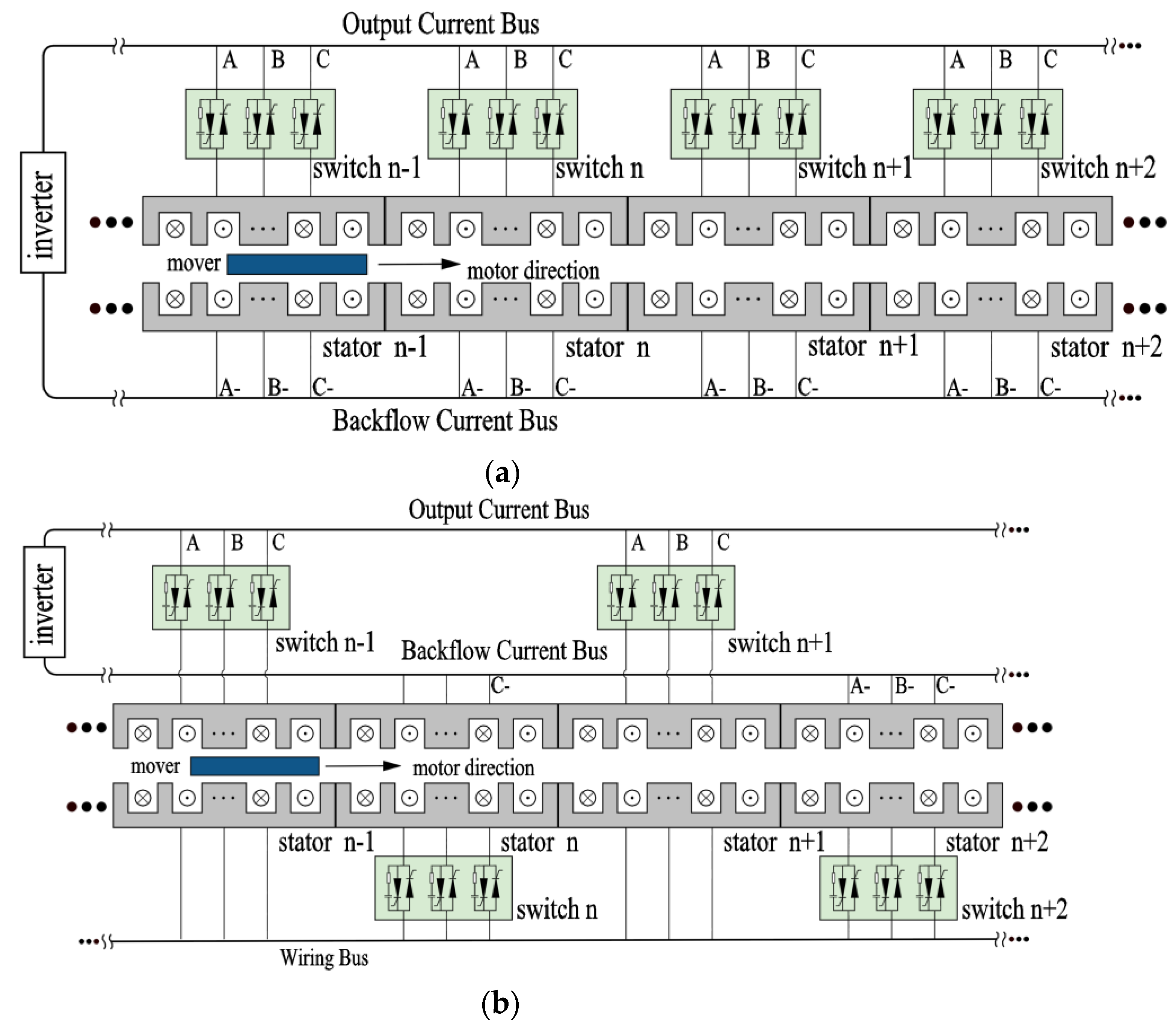
Figure 3.
Single-phase equivalent circuit of motor under normal operation of parallel power supply :(a) Current positive half wave circuit diagram; (b) Current negative half wave circuit diagram.
Figure 3.
Single-phase equivalent circuit of motor under normal operation of parallel power supply :(a) Current positive half wave circuit diagram; (b) Current negative half wave circuit diagram.
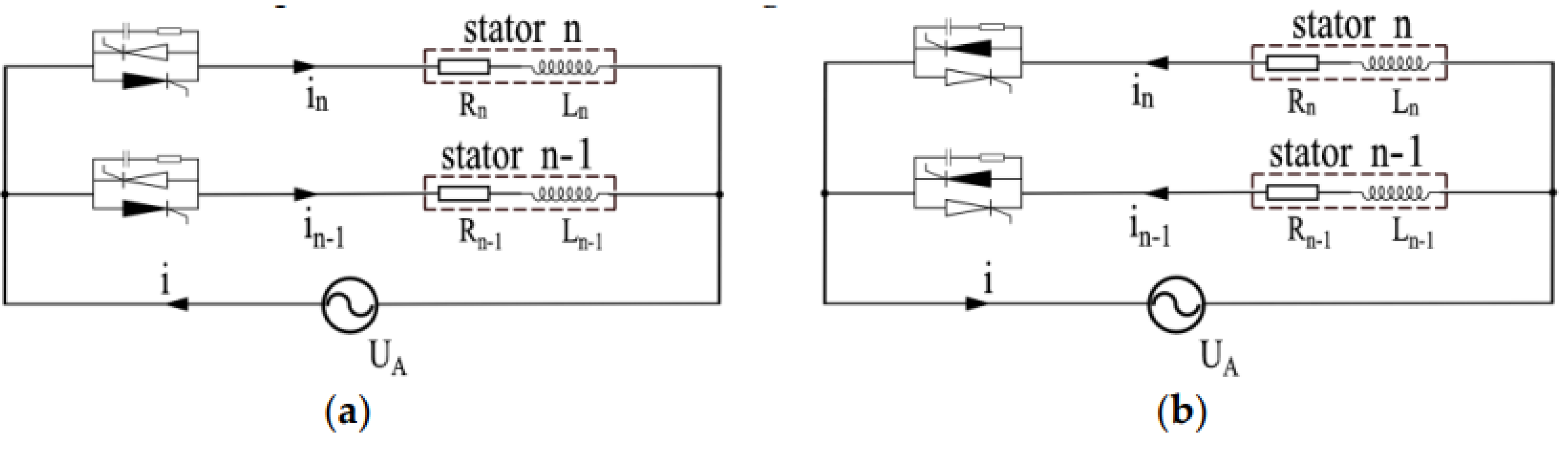
Figure 4.
Parallel power supply mode switching process when current and voltage are in the same direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
Figure 4.
Parallel power supply mode switching process when current and voltage are in the same direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
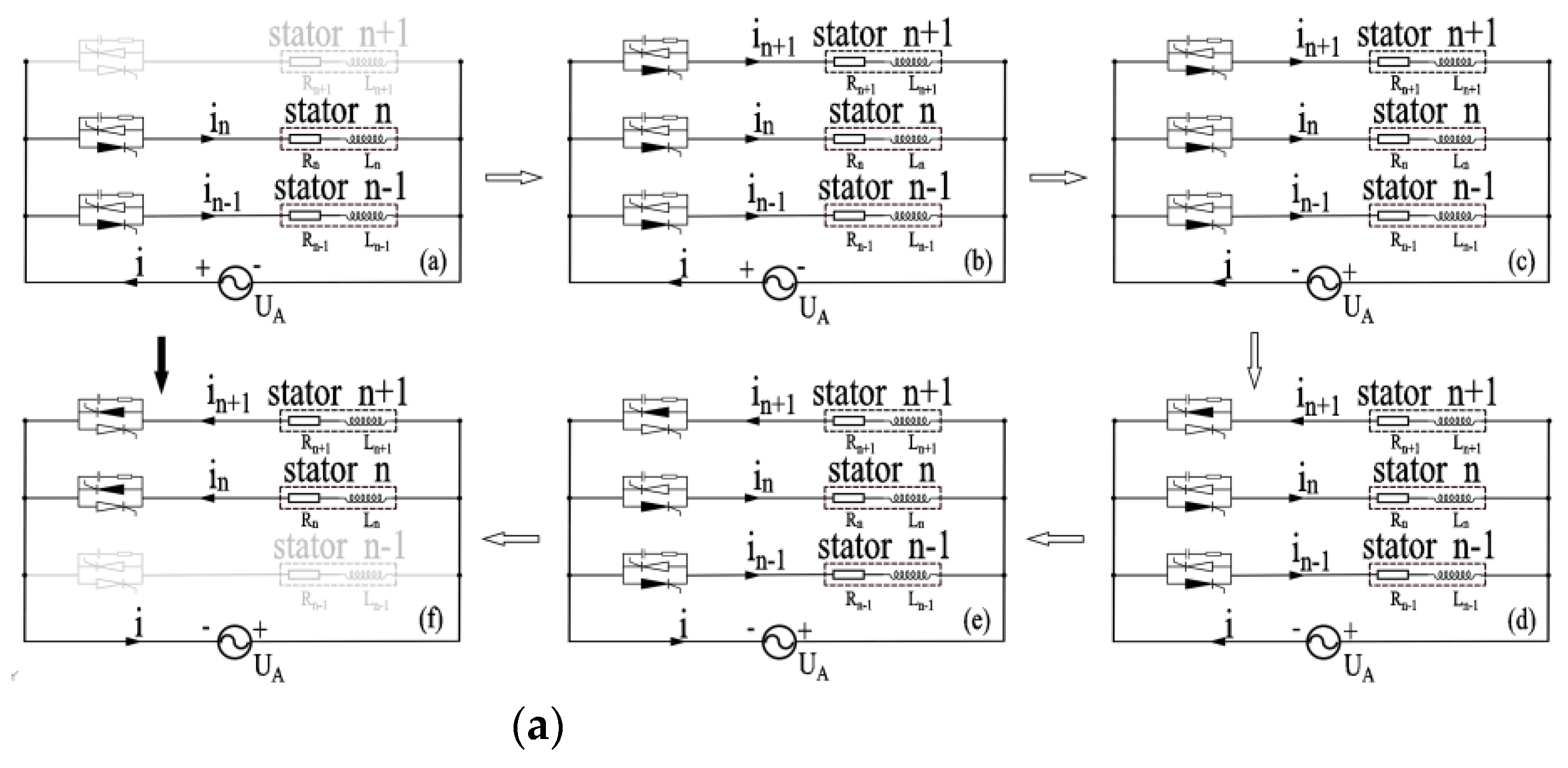
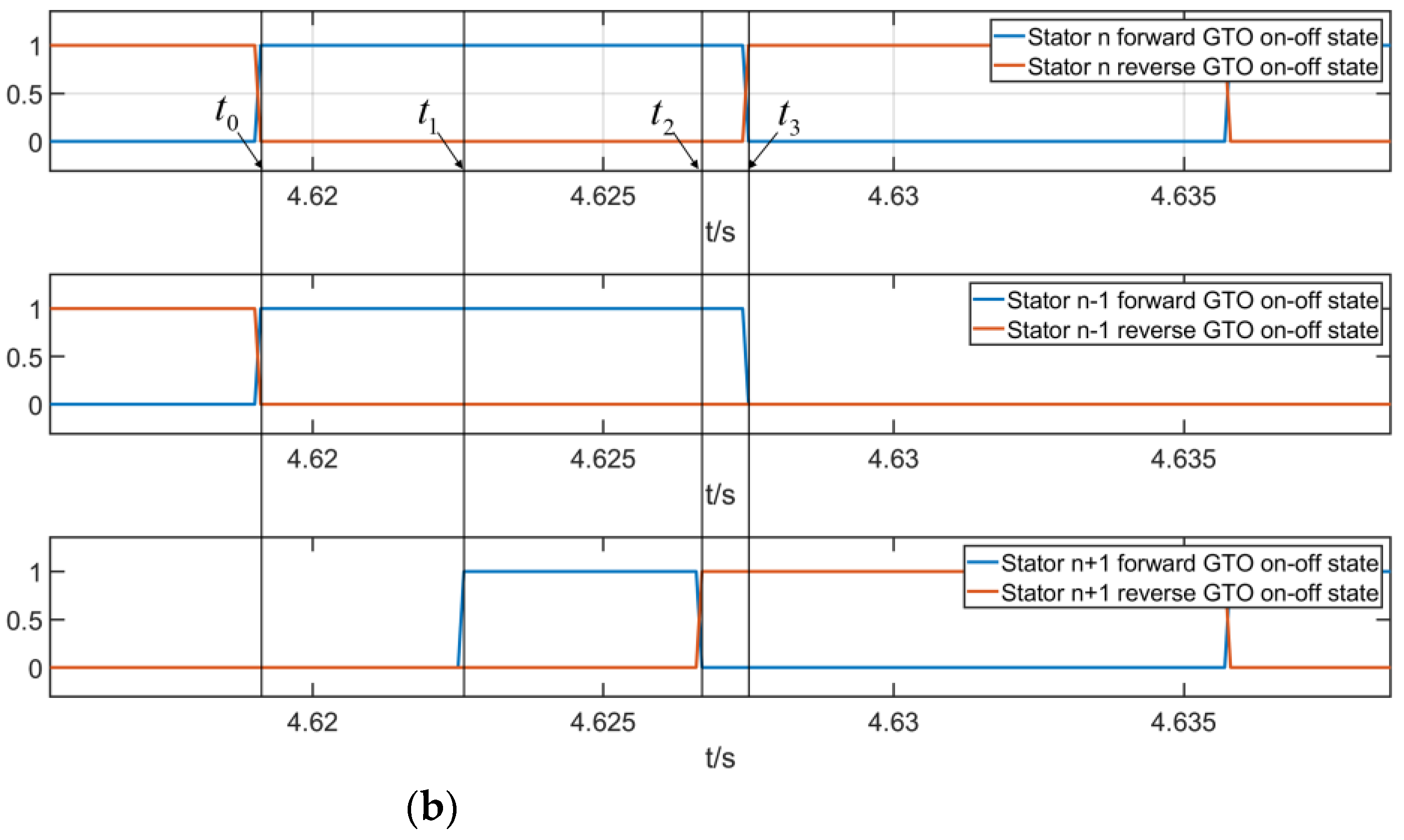
Figure 5.
Parallel power supply mode switching process when current and voltage are in the reversed direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
Figure 5.
Parallel power supply mode switching process when current and voltage are in the reversed direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
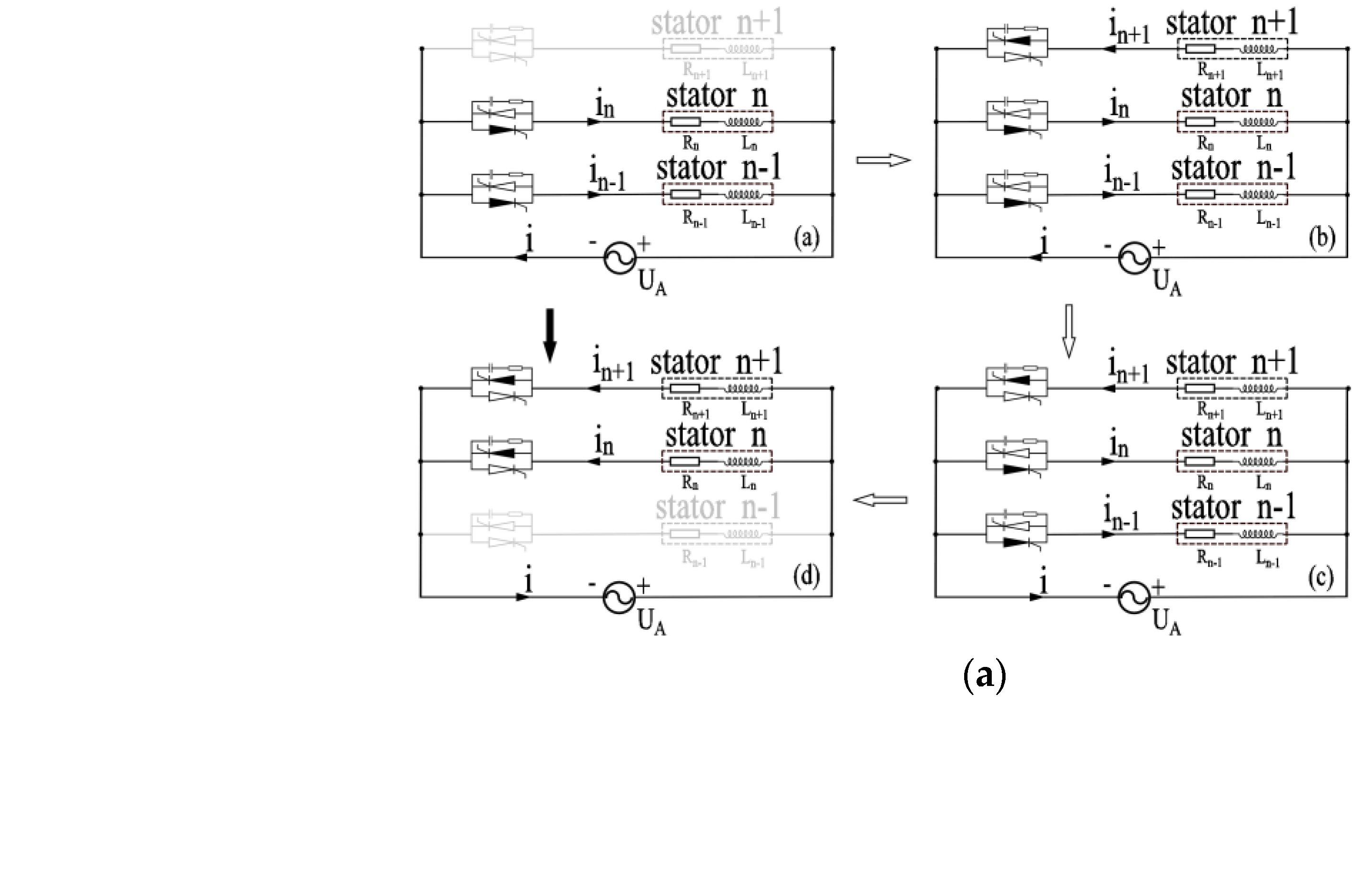
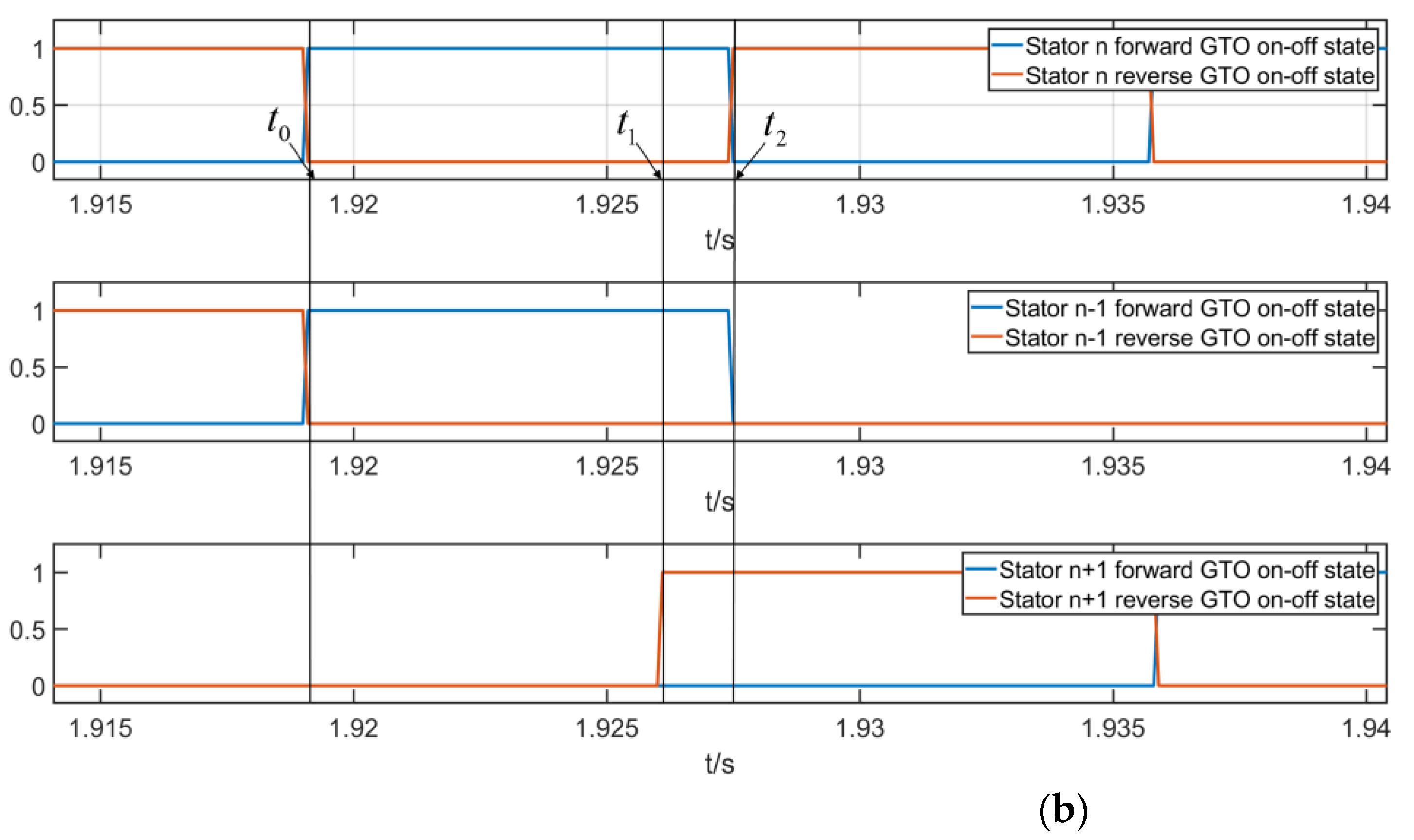
Figure 6.
Single-phase equivalent circuit of motor under normal operation of series power supply : (a) Current positive half wave circuit diagram; (b) Current negative half wave circuit diagram.
Figure 6.
Single-phase equivalent circuit of motor under normal operation of series power supply : (a) Current positive half wave circuit diagram; (b) Current negative half wave circuit diagram.
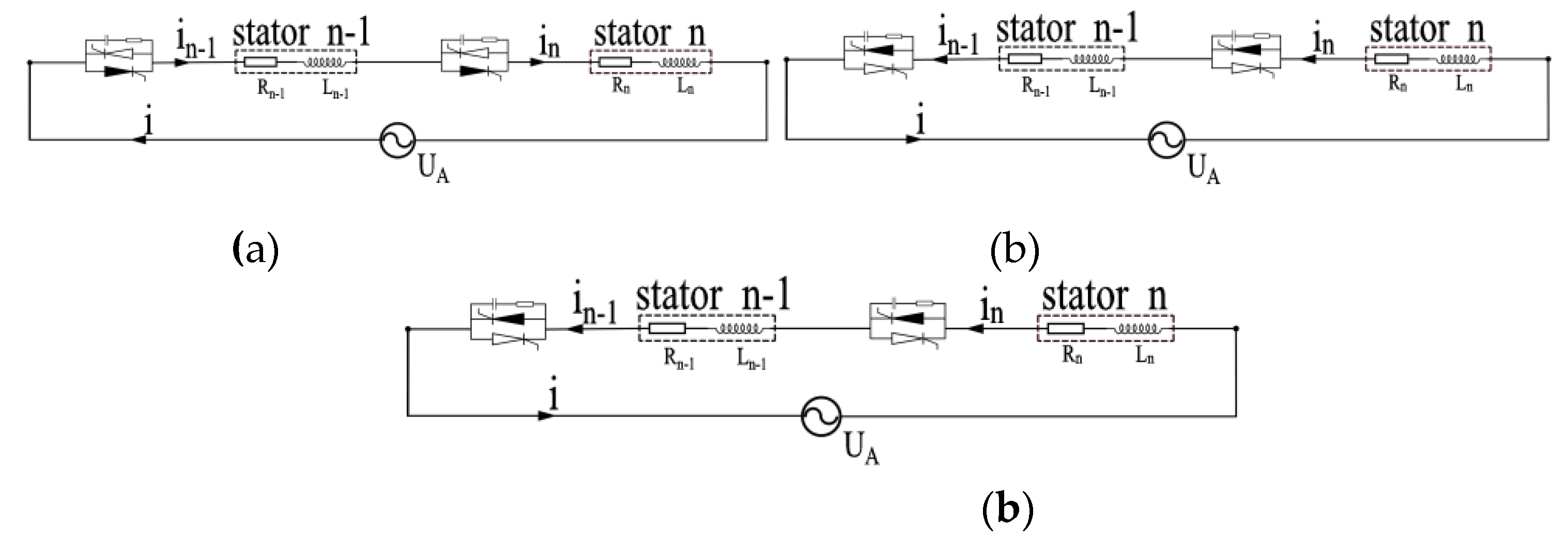
Figure 7.
Series power supply mode switching process when current and voltage are in the same direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
Figure 7.
Series power supply mode switching process when current and voltage are in the same direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
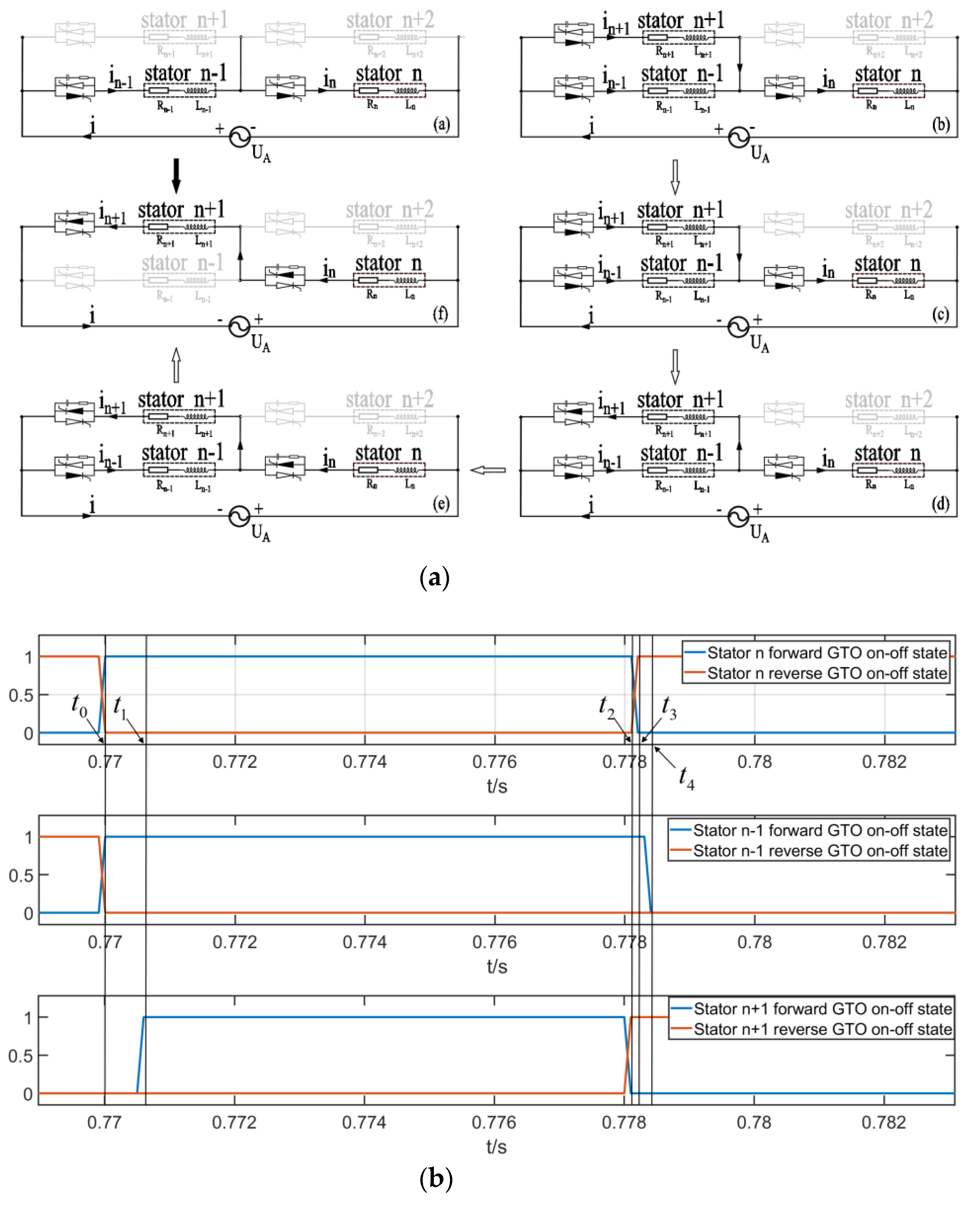
Figure 8.
Series power supply mode switching process when current and voltage are in the reversed direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
Figure 8.
Series power supply mode switching process when current and voltage are in the reversed direction:(a) The changes of circuit and current direction; (b) The conduction of each thyristor.
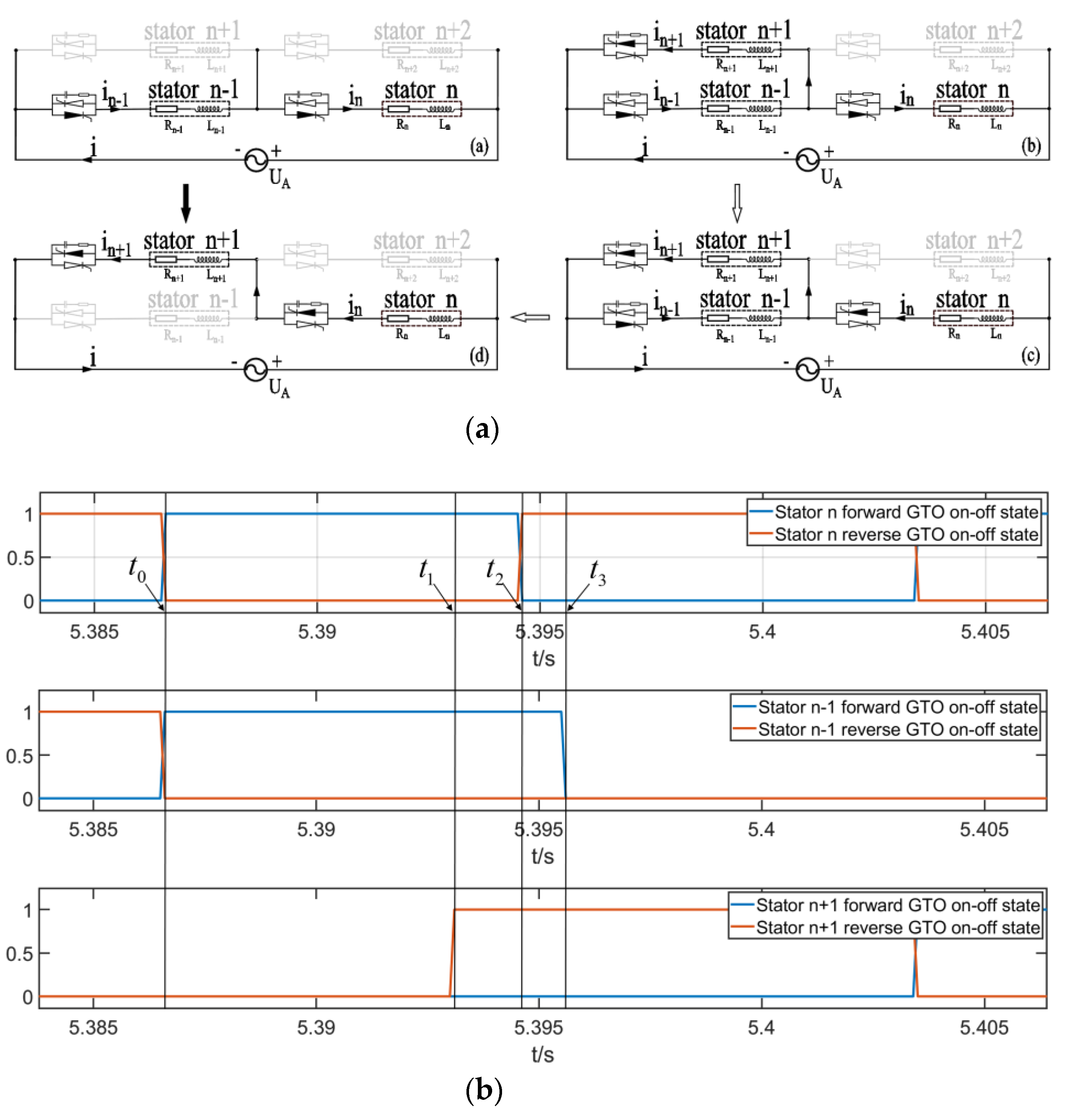
Figure 9.
The effect of using fixed threshold method to determine zero-crossing point when current frequency changes rapidly.
Figure 9.
The effect of using fixed threshold method to determine zero-crossing point when current frequency changes rapidly.
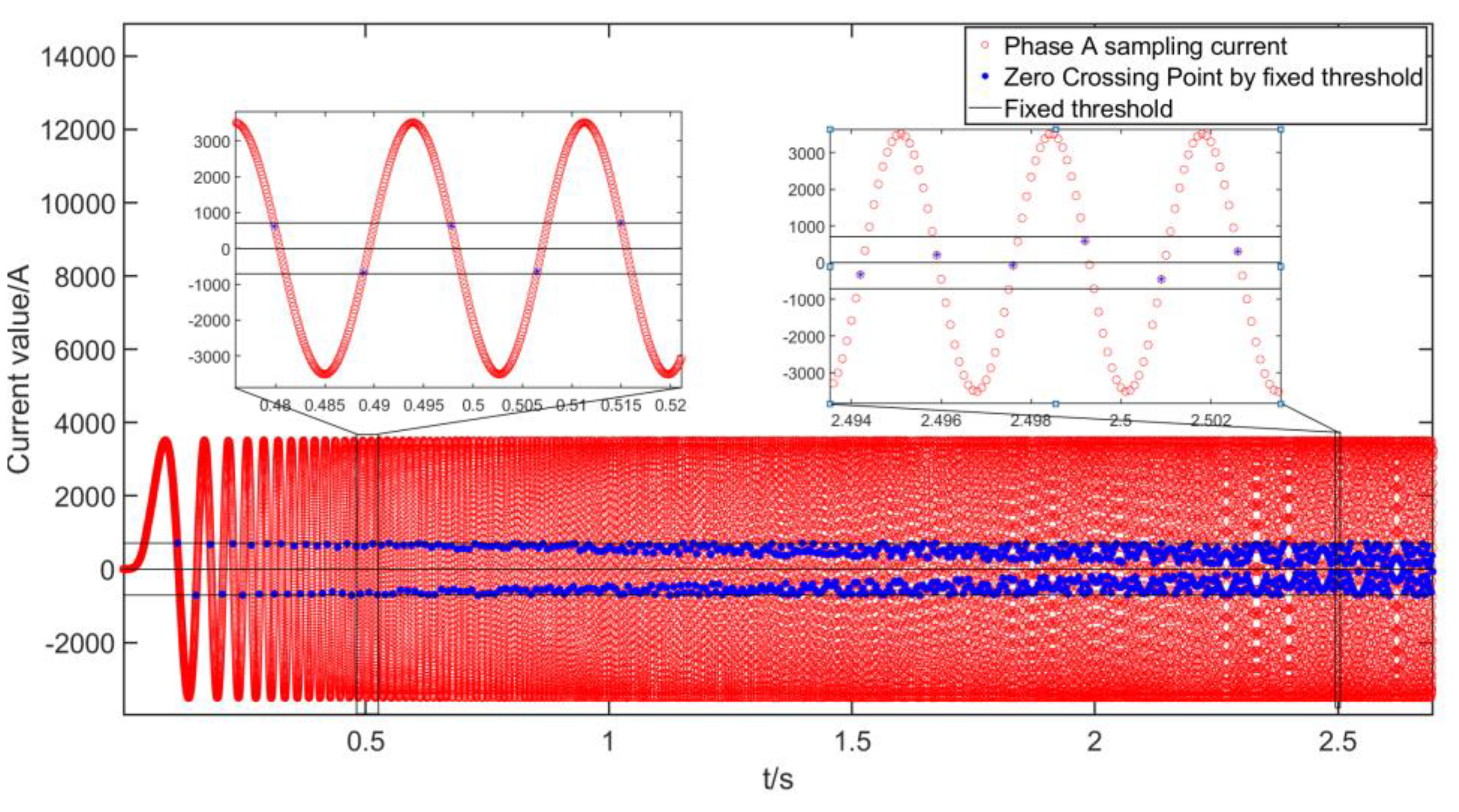
Figure 10.
The effect of using fixed threshold method to determine zero-crossing point when current waveform is irregular
Figure 10.
The effect of using fixed threshold method to determine zero-crossing point when current waveform is irregular
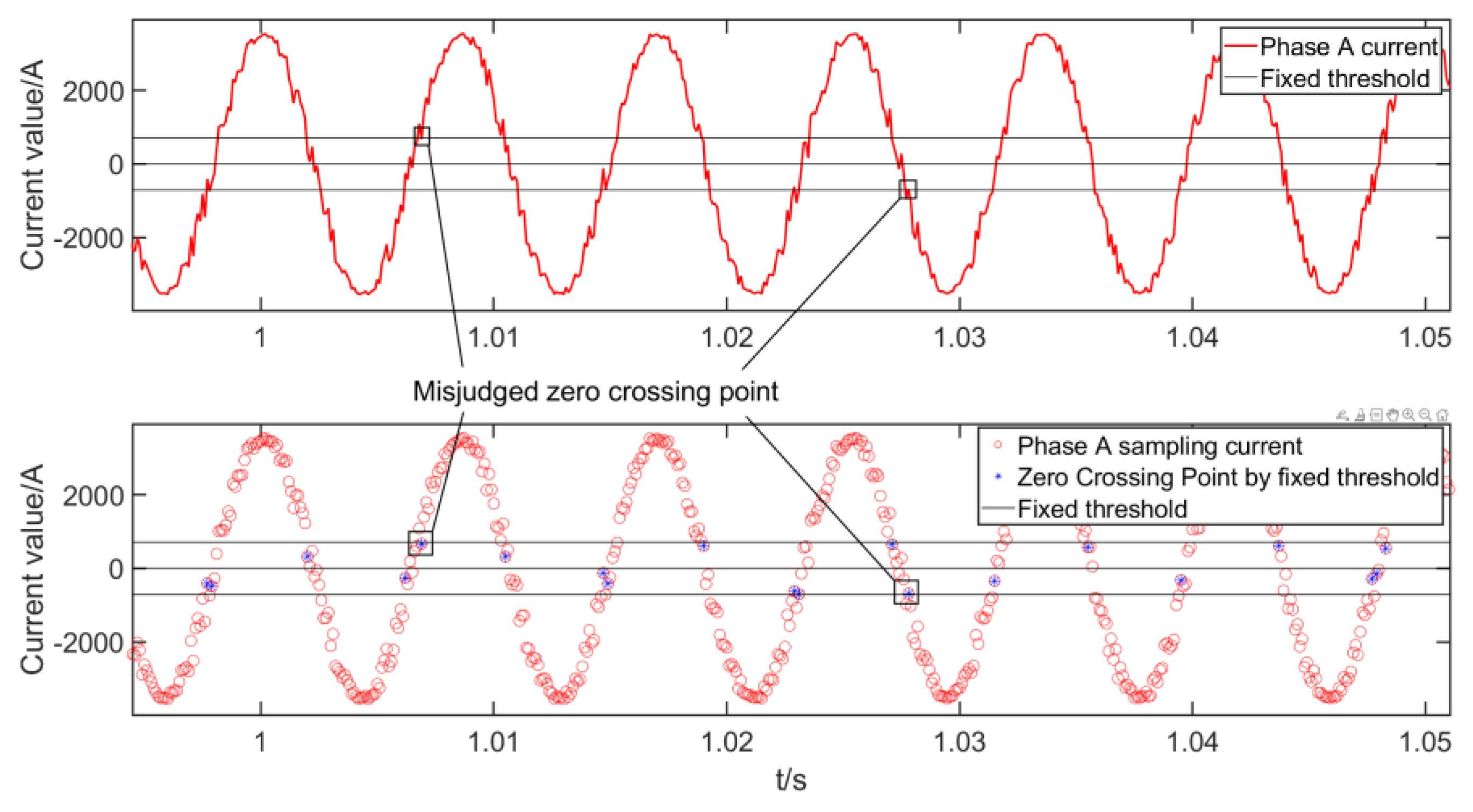
Figure 11.
The effect of new method to judge the zero-crossing point of rapidly changing current: (a) Judgement effect of zero-crossing point when current frequency increases rapidly, (b) Judgement effect of zero crossing when current frequency decreases rapidly.
Figure 11.
The effect of new method to judge the zero-crossing point of rapidly changing current: (a) Judgement effect of zero-crossing point when current frequency increases rapidly, (b) Judgement effect of zero crossing when current frequency decreases rapidly.
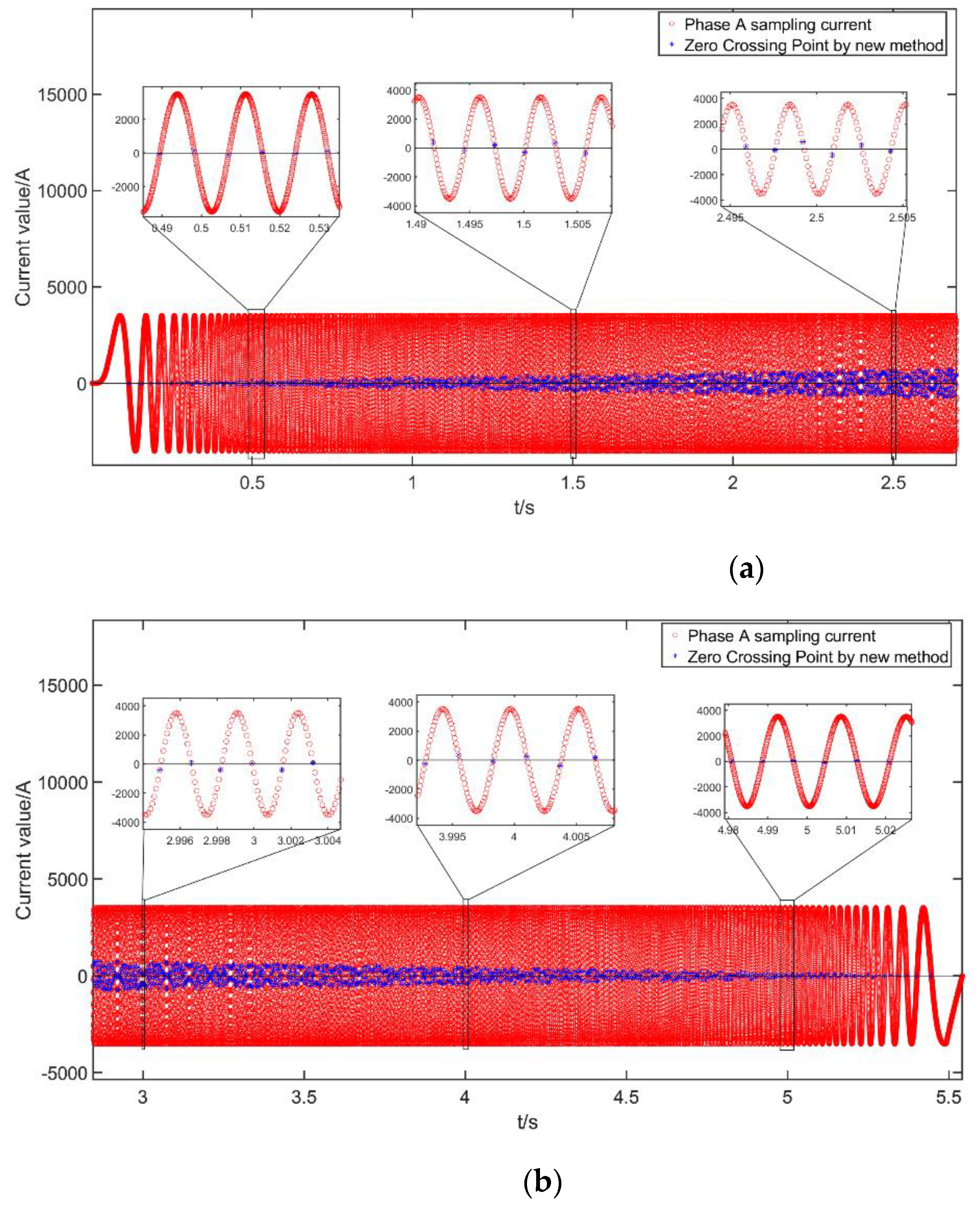
Figure 12.
The effect of new method to judge the zero-crossing point of serious irregular current
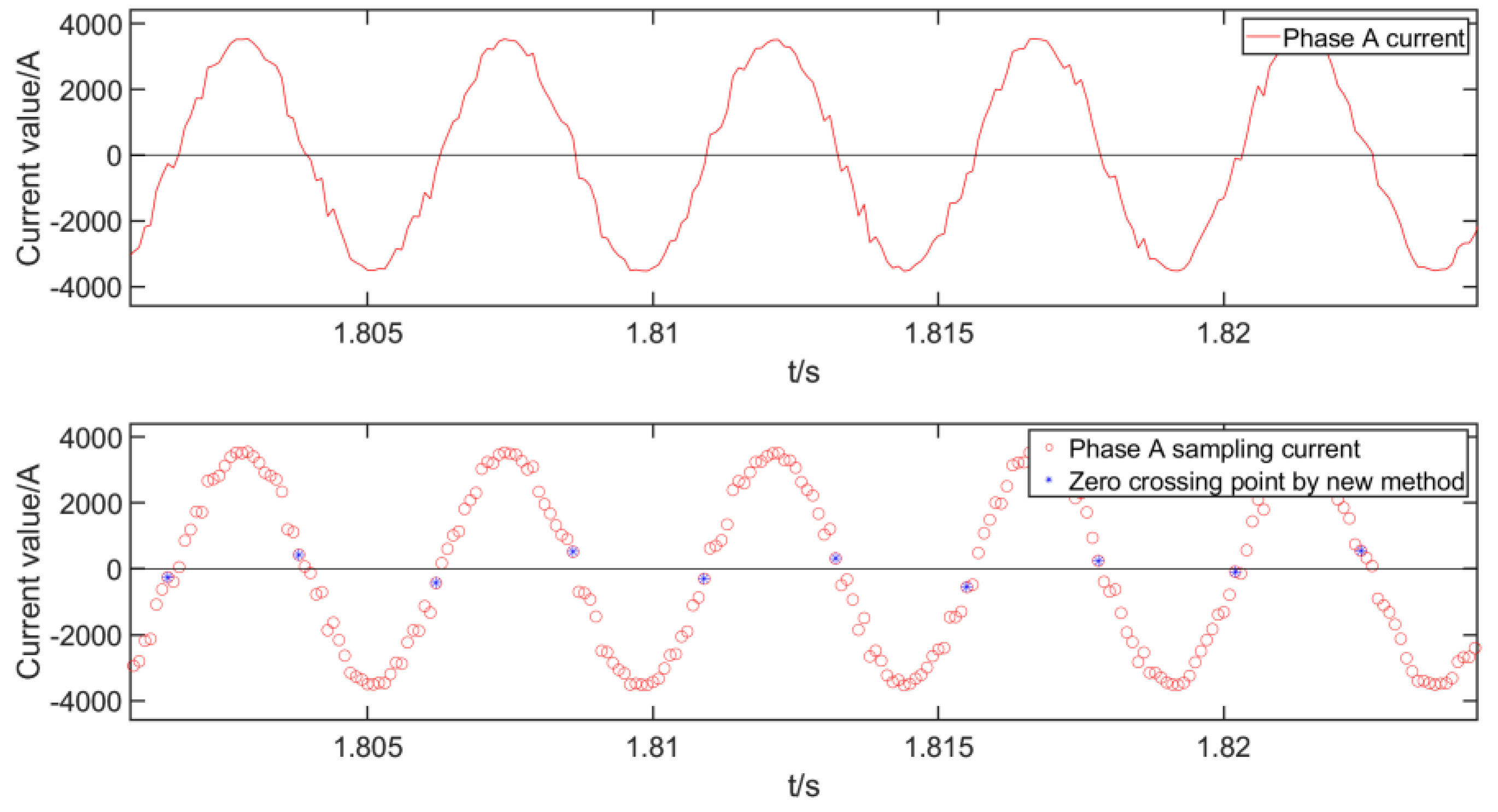
Figure 13.
Current and voltage waveform during stator sections switching parallel power supply: (a) Switching current waveforms when the voltage and current directions are the same., (b) Switching current waveform when voltage and current directions are reversed.
Figure 13.
Current and voltage waveform during stator sections switching parallel power supply: (a) Switching current waveforms when the voltage and current directions are the same., (b) Switching current waveform when voltage and current directions are reversed.
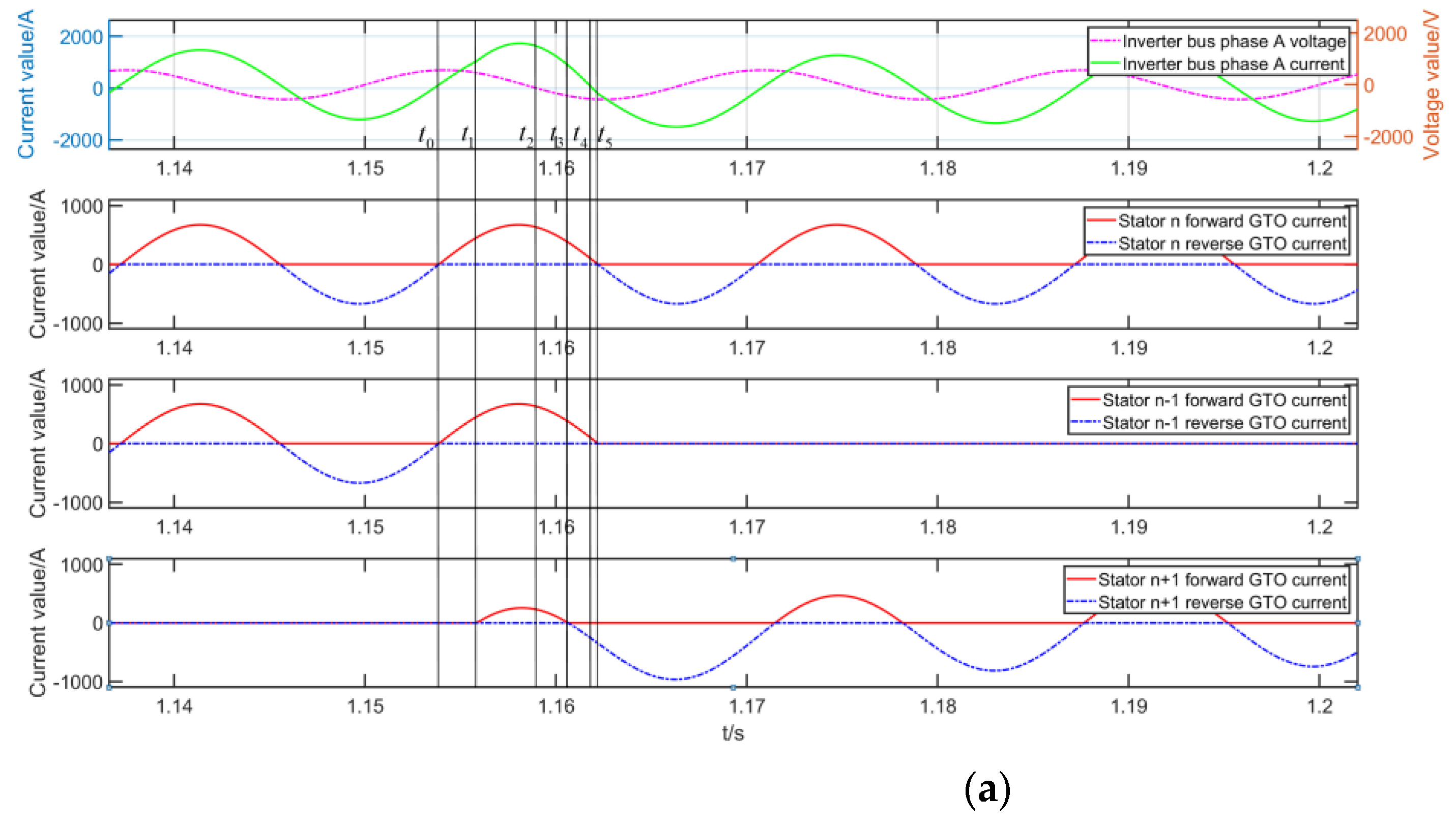
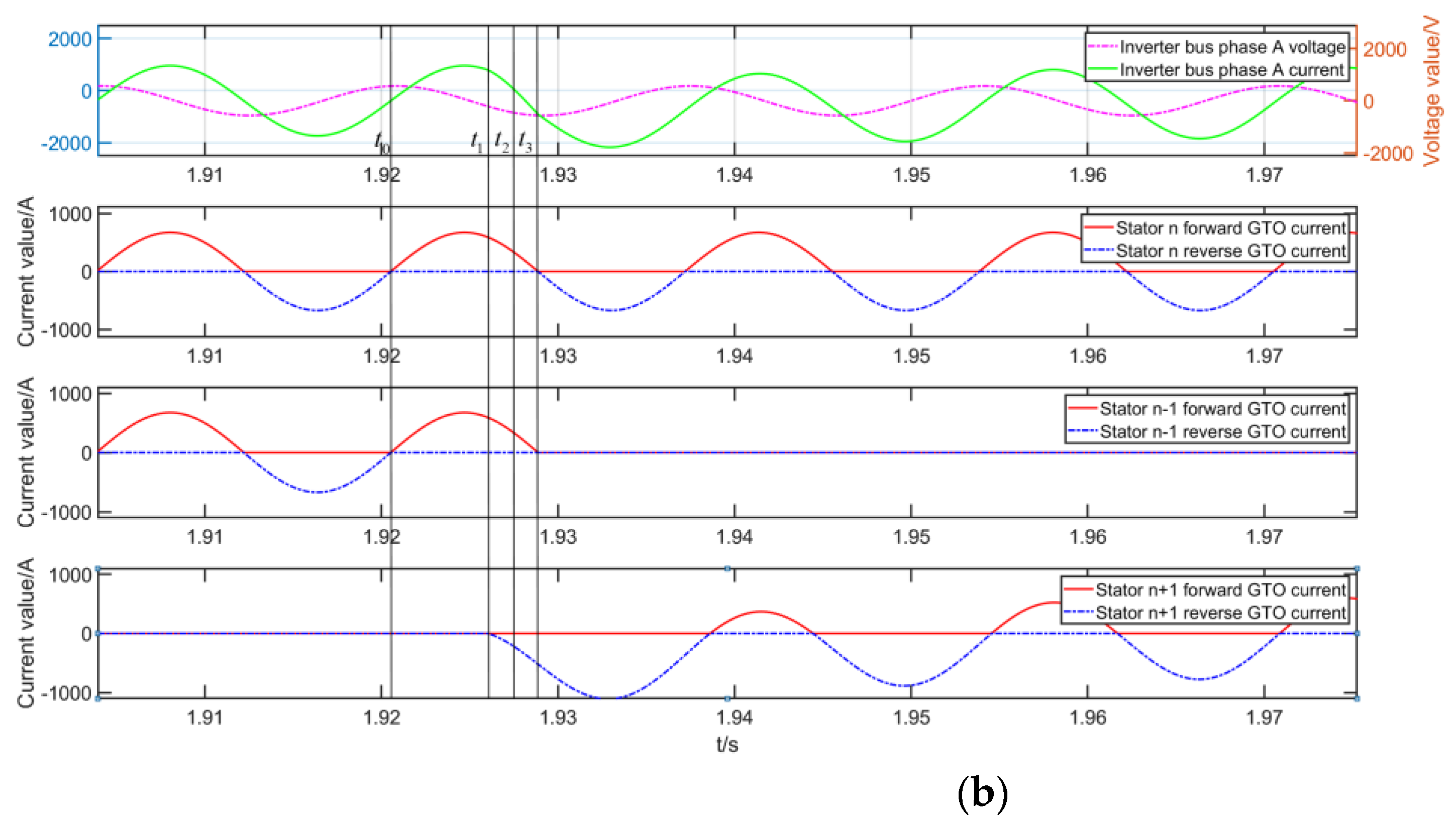
Figure 14.
Current and voltage waveform during stator sections switching series power supply: (a) Switching current waveforms when the voltage and current directions are the same., (b) Switching current waveform when voltage and current directions are reversed.
Figure 14.
Current and voltage waveform during stator sections switching series power supply: (a) Switching current waveforms when the voltage and current directions are the same., (b) Switching current waveform when voltage and current directions are reversed.
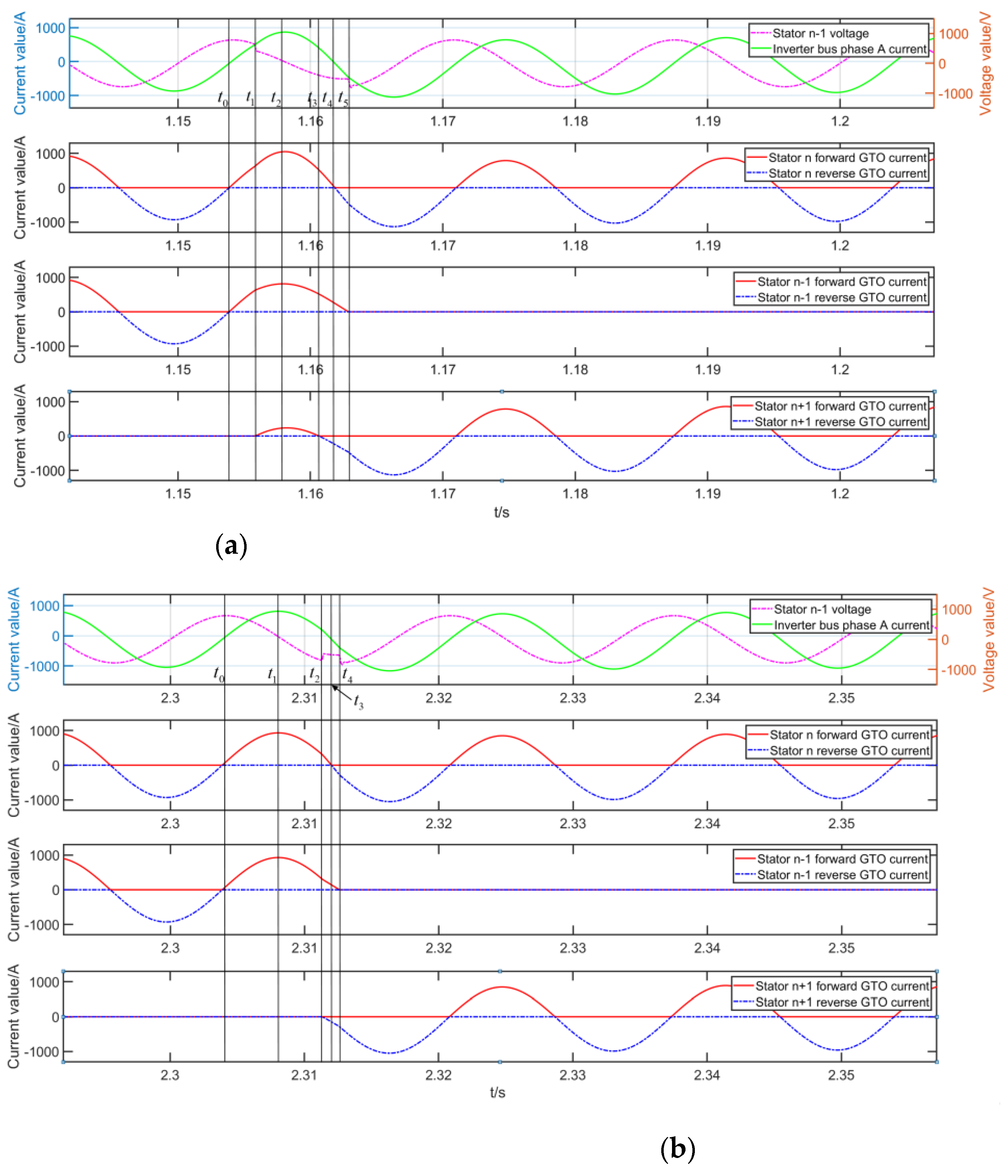
Figure 15.
The current waveform when stator section switching using a fixed threshold method.
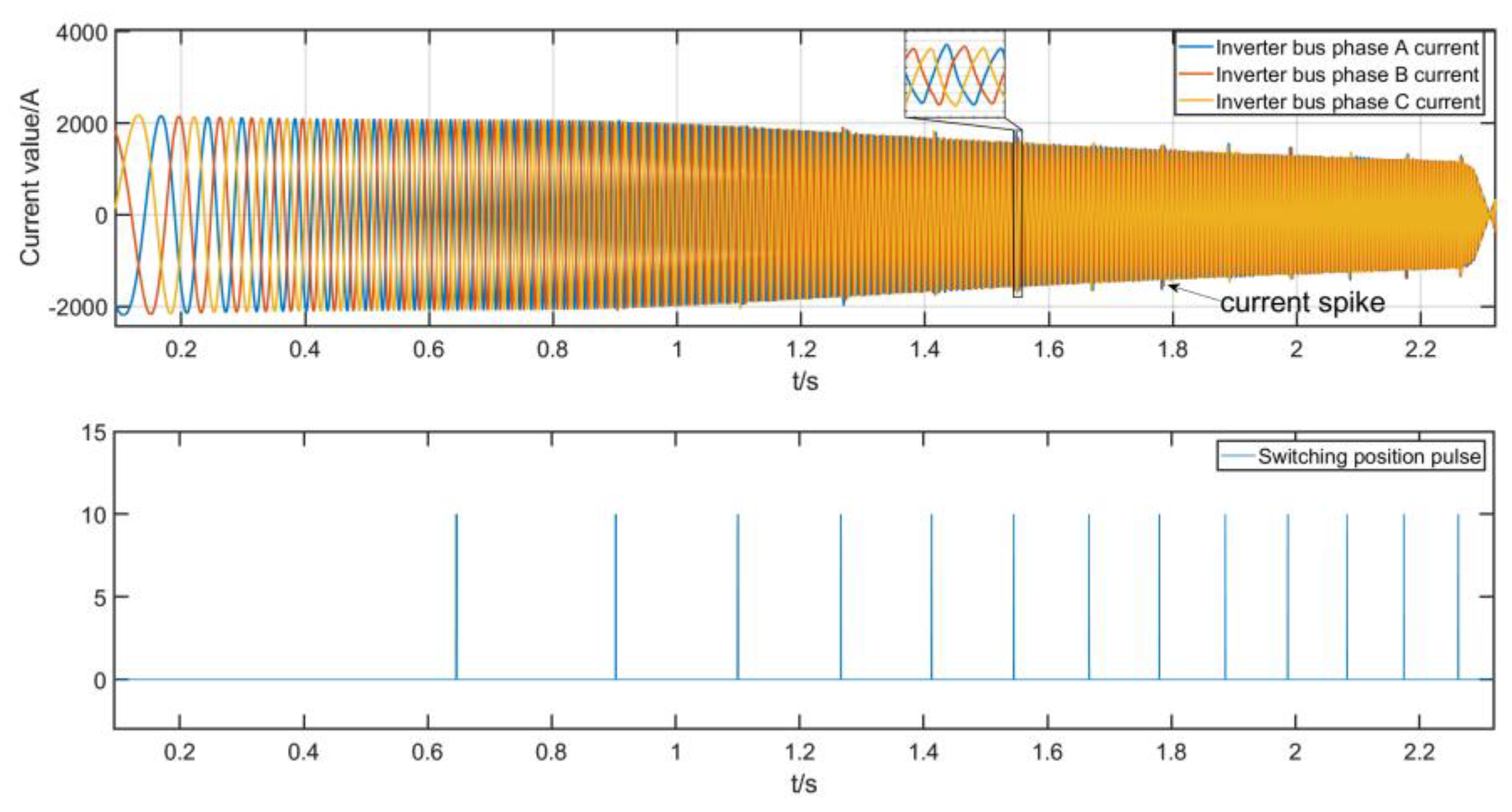
Figure 16.
The current waveform when stator section switching using current zero-crossing switching method proposed in this paper.
Figure 16.
The current waveform when stator section switching using current zero-crossing switching method proposed in this paper.
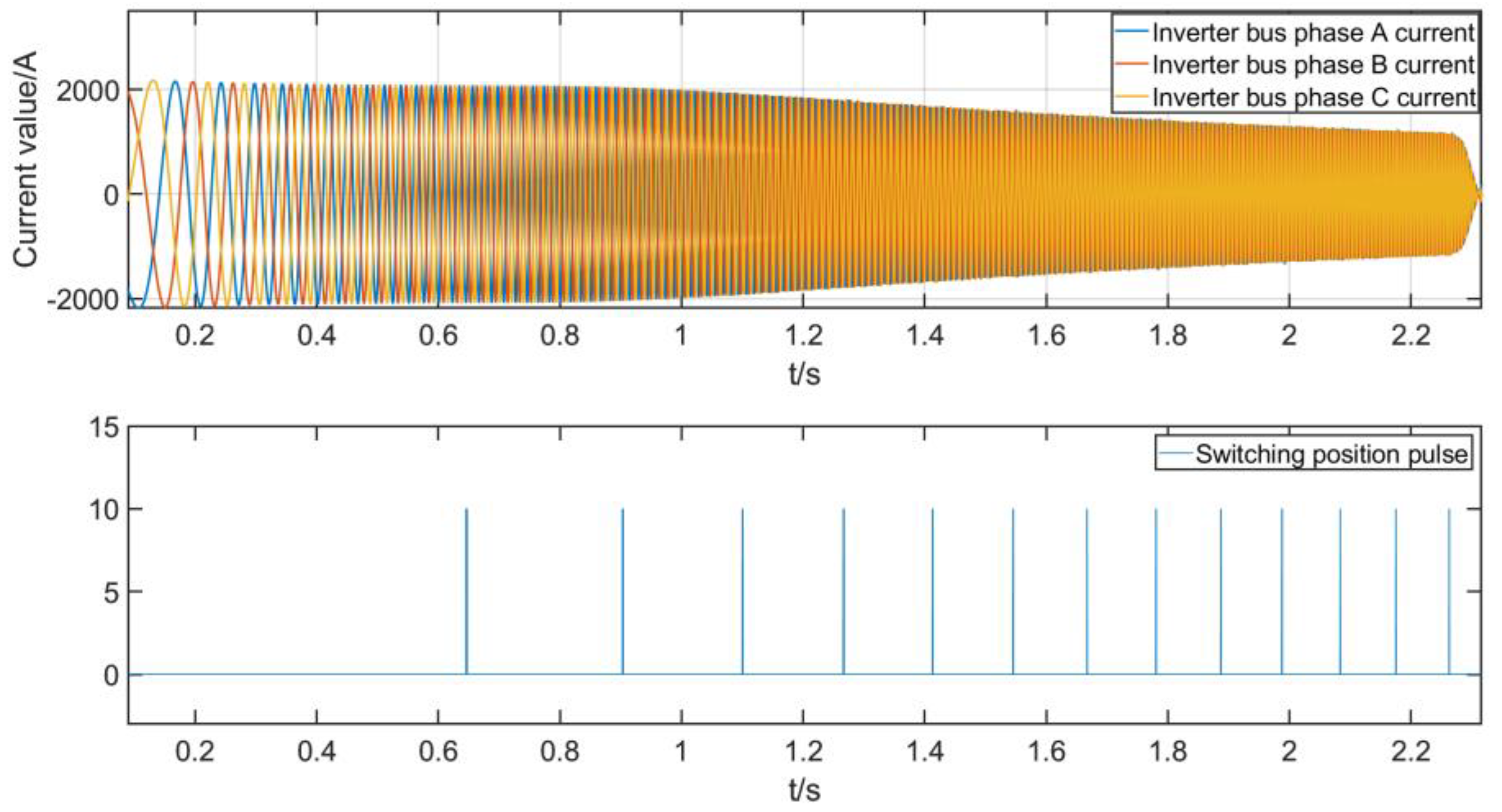
Figure 17.
The main components of the. large thrust segmented linear motor testing machine.
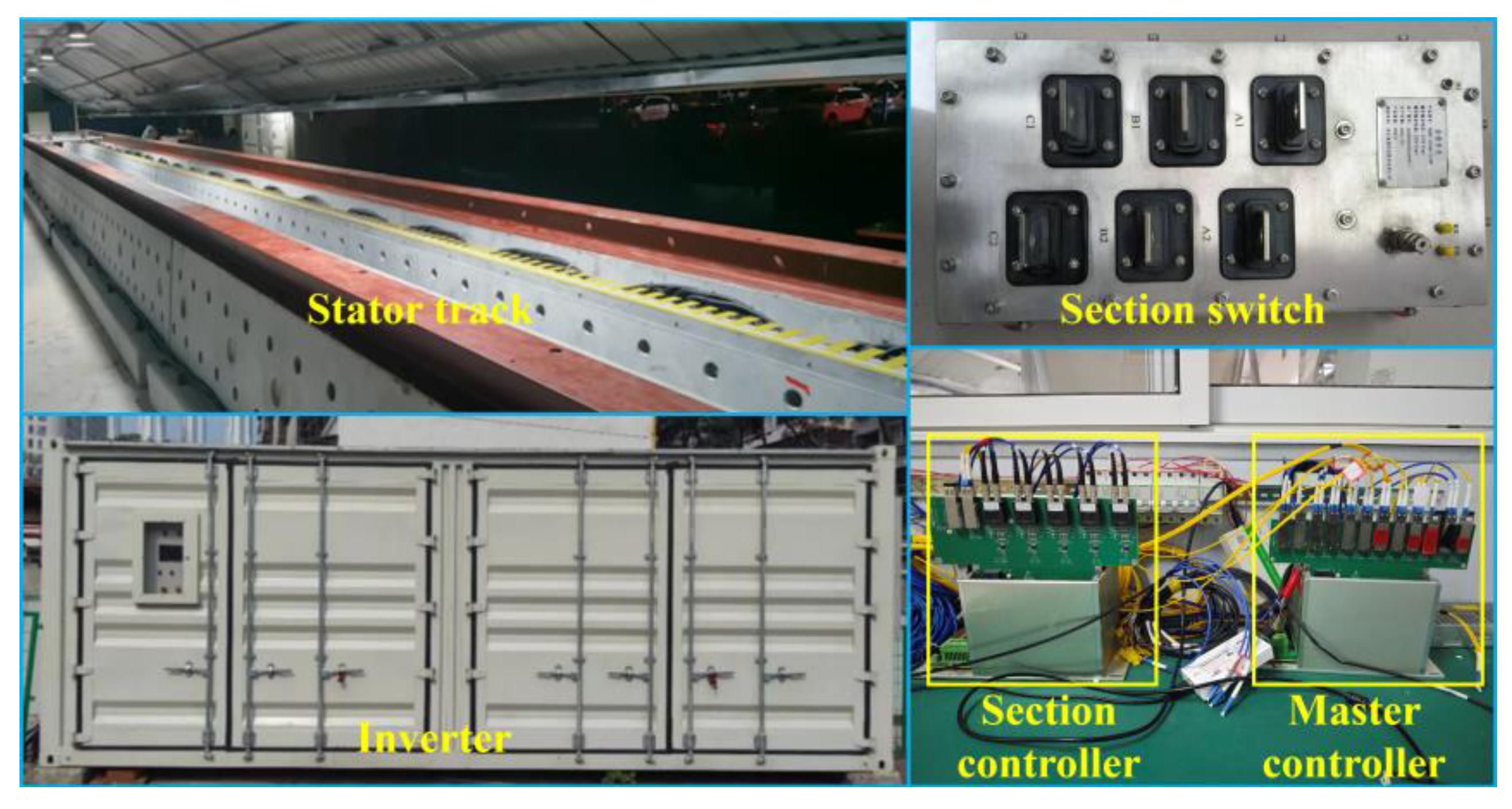
Figure 18.
Current waveform of motor during 2000A constant thrust operation (a) Fixed threshold zero-crossing switching effect., (b) Switching effect of the method proposed in this paper.
Figure 18.
Current waveform of motor during 2000A constant thrust operation (a) Fixed threshold zero-crossing switching effect., (b) Switching effect of the method proposed in this paper.
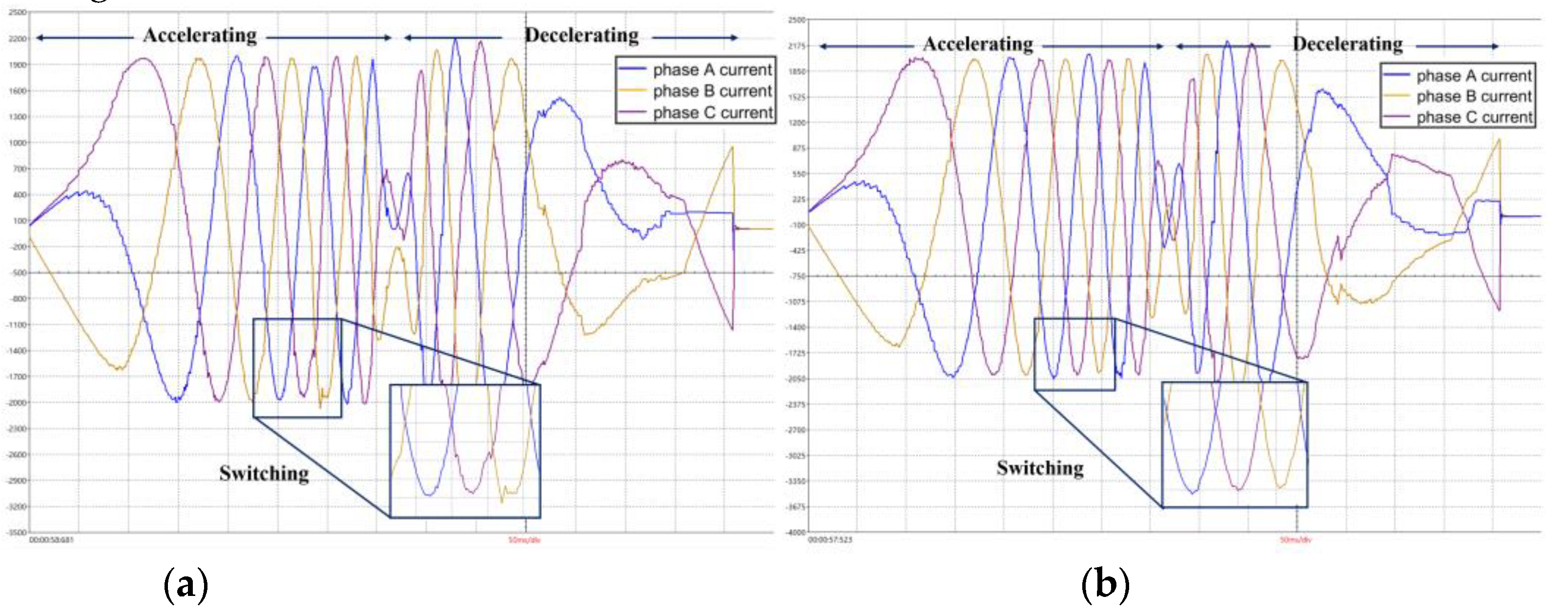
Figure 19.
Current waveform of motor during 3300A constant thrust operation (a) Fixed threshold zero-crossing switching effect., (b) Switching effect of the method proposed in this paper
Figure 19.
Current waveform of motor during 3300A constant thrust operation (a) Fixed threshold zero-crossing switching effect., (b) Switching effect of the method proposed in this paper
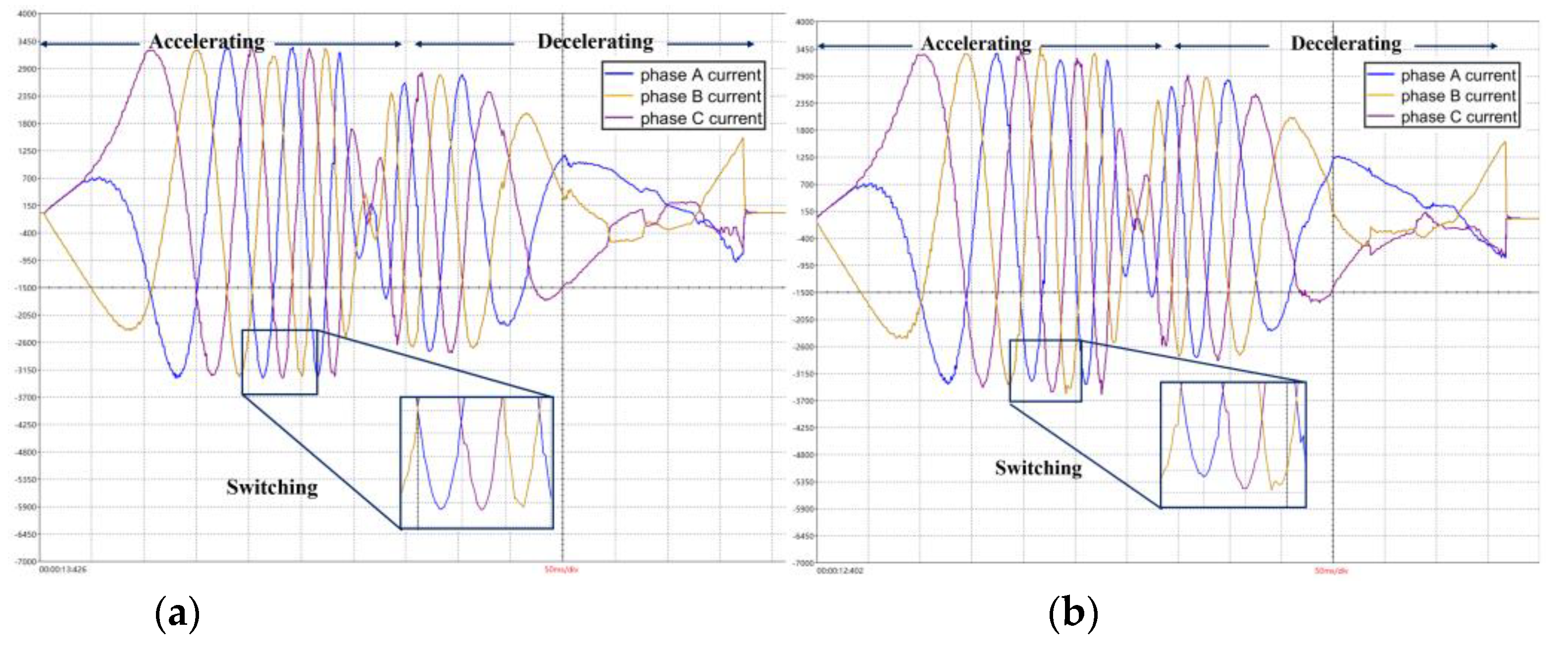

Table 1.
Nominal parameters of the stator segmented linear motor.
| Symbol | Parameters | Values |
| U | DC bus voltage | 1000 V |
| l | Stator segment length | 15.408m |
| R0 | Segmented stator resistance | 93.1 mΩ |
| L0 | Segmented stator inductance | 22.2 mH |
| M0 | Segmented stator mutual inductance | 5.6mH |
| Nominal mover flux linkage | 1.065 Wb | |
| Superconducting mover flux linkage | 8.52Wb | |
| m | Mover mass | 215 kg |
| τ | Polar distance | 0.54 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



