
Submitted:
01 October 2024
Posted:
02 October 2024
You are already at the latest version
Abstract
In recent decades, the development of surgical systems that minimize patient impact has been a major focus for surgeons and researchers, leading to the advent of robotic systems for minimally invasive surgery. These technologies offer significant patient benefits, including enhanced outcome quality and accuracy, reduced invasiveness, lower blood loss, decreased postoperative pain, diminished infection risk, and shorter hospitalization and recovery times. Surgeons benefit from the elimination of human tremor, ergonomic advantages, improved vision systems, better access to challenging anatomical areas, and magnified 3DHD visualization of the operating field.
Since 2000, Intuitive Surgical has developed multiple generations of master-slave multi-arm robots, securing over 7,000 patents, which created significant barriers for competitors. This monopoly resulted in the widespread adoption of their technology, now used in over 11 million surgeries globally. With the expiration of key patents, new robotic platforms featuring innovative designs, such as modular systems, are emerging.
This review examines advancements in robotic surgery within the fields of general, urological, and gynaecological surgery. The objective is to analyse the current robotic surgical platforms, their technological progress, and their impact on surgical practices. By examining these platforms, this review provides insights into their development, potential benefits, and future directions in robotic-assisted surgery.
Keywords:
robotic-assisted surgery
; new surgical robots
; robotic surgery
1. Introduction
In recent decades, robotics has expanded beyond traditional industrial applications to serve humans more closely in diverse fields, most notably in healthcare [1,2]. One of the most groundbreaking advancements has been the integration of robots in the medical field, particularly in surgery. Robotic-assisted surgical systems (RASS) have gained considerable traction in minimally invasive surgery (MIS), where robots assist surgeons in performing intricate procedures with enhanced precision, dexterity, and control [3,4]. Initially met with scepticism, robotic surgery has evolved, and as new technologies have made systems more reliable, many patients now opt for robotic procedures without hesitation. This has resulted in the worldwide increase in robotic surgeries, which today account for approximately 3% of all surgeries, providing patients with the benefits of fewer complications, faster recovery times, reduced hospital stays, and a quicker return to normal activities [5,6].
The COVID-19 pandemic further underscored the role of robotics in healthcare, particularly in telemedicine. Hospitals, being high-risk environments for infectious disease transmission, saw an increase in the need for remote medical interventions. Robotic systems allowed healthcare professionals to maintain social distancing while still offering quality care, thus enhancing safety for both patients and medical staff [7]. In surgical settings, robotic systems are particularly valuable due to their ability to perform complex tasks with high precision, even in confined spaces. With their small size, optimized force control, and high accuracy, robots are now instrumental in performing procedures that minimize tissue trauma, such as those used in urology, gynecology, and general surgery [3,4,5,6]. For these reasons, the use of robotic surgery has grown more significantly in these surgical specialties compared to others [8,9].
RASS systems are designed to assist surgeons by providing highly dexterous instruments, enabling smaller and less traumatic access into the patient’s body [2]. This precision leads to faster healing times and shorter hospital stays, ultimately reducing the overall costs of surgical procedures per patient. Moreover, the use of robotic arms for positioning and holding surgical tools alleviates the physical strain on assistants and reduces mental stress for surgeons, who can rely on the robot’s enhanced positioning and working accuracy [10].
Despite these advancements, the widespread adoption of robotic surgery is hindered by several challenges. The technological complexity of these systems, coupled with a difficult patent landscape and stringent regulatory barriers, has slowed their integration into everyday surgical practice [11]. The high cost of robotic systems, as well as the significant time and effort required to train surgeons in new robotic techniques, further limit the widespread use of these systems [12].
Intuitive Surgical®‘s Da Vinci system, the most widely recognized and used robotic surgical system, has dominated the market for more than two decades due to its set of patents, with over 7,500 installations worldwide and more than 11 million procedures performed as of early 2023 [13,14]. However, the scenario is changing: the expiration of key patents has paved the way for new competitors to enter the market, prompting the development of alternative robotic systems that aim to challenge Da Vinci’s dominance [2,15,16].
Despite the initial barriers, the market for surgical robotics is expected to grow significantly in the coming years. This growth is fueled not only by technological advancements but also by increased demand for minimally invasive procedures, which offer better outcomes for patients in terms of safety and recovery [17].
However, the high cost of surgical robots, along with the need for specialized training, currently limits access to these systems, especially in low- and middle-income countries where healthcare resources are already scarce [18]. As robotic surgery continues to evolve, it is critical to ensure that these advancements are accessible to the broader global population, not just wealthier healthcare systems. Reducing the costs of these platforms is key to their worldwide adoption, and increased competition among industries can help achieve this goal.
This narrative review provides a comprehensive overview of the state-of-the-art robotic systems used to perform urology, gynecology and general surgery which represent an alternative to the Intuitive®’s robots. In particular, it is essential to examine the alternative platforms that have been developed and for which studies are available in the literature, focusing on both their technical aspects and the outcomes achieved. A thorough analysis of these platforms will provide insights into their design innovations, operational efficiency, and clinical performance, allowing a better understanding of their potential advantages and limitations.
2. Materials and Methods
A narrative literature review was conducted to provide a comprehensive overview of the surgical systems available for use in urology, gynecology, and general surgery.
An initial search was conducted in grey literature and online to identify newly available robotic platforms, distinct from the ones produced by the Intuitive Surgical® company.
An electronic search was carried out across the PubMed, Scopus, and Web of Science databases up to June 2024. The following keywords were used to perform the search: “avatera surgical robot”, “senhance surgical robot”, “canady surgical robot”, “revo-i surgical robot”, “autolap surgical robot”, “enos surgical robot”, “micro hand s surgical robot”, “hugo surgical robot”, “mira surgical robot”, “vicarios surgical robot”, “anovo surgical robot”, “dexter surgical robot”, “emaro surgical robot”, “vista surgical robot”, “panorama surgical robot”, “Endomaster EASE system surgical robot”, “hinotori surgical robot”, “EPIONE surgical robot”, “LBR Med surgical robot”, “XACT surgical robot”, “Galen surgical robot”, “Versius surgical robot”, “Bitrack surgical robot”, “Verb surgical robot”, “SurgiBot surgical robot”, “PROCEPT surgical robot”, “Roboflex surgical robot”, “Flex surgical robot”, Monarch surgical robot”, “Maestro surgical robot”, “Mantra surgical robot”, “Kangduo surgical robot”, “Sensei X surgical robot”, “Toumai surgical robot”.
The following criteria for inclusion were employed in the article selection process:
- Written in English language.
- Full articles excluding reviews, perspectives, and communications.
- Full text available.
- Published from 2014 to June 2024.
- Any general surgery intervention performed in gynecology, urology or general surgery.
- Any robotic system which has a console
Otherwise, the following exclusion criteria were considered:
- Articles that contained simulation and tests.
- Papers centered on telesurgery, telementoring or telepresence.
- Studies which report only the procedure.
- Papers related to study on animals or cadavers.
- Articles which concern with the surgeon training.
The references from the review were examined to identify relevant papers for inclusion in the research. Titles and abstracts of the articles were screened to evaluate their relevance based on the inclusion and exclusion criteria.
3. Results
During the keyword searches in the relevant databases, several of the previously mentioned robots were excluded for two main reasons: their lack of relevance to the specific types of surgery being investigated and the absence of related articles in the literature. Consequently, the following robots were retained for further consideration: Avatera, Senhance®, Revo-i®, Micro Hand S, HugoTM, Dexter, HinotoriTM, Versius®, Mantra, KangDuo, and Toumai®.
In searching for these robots across the databases, a total of 1,298 articles was re-trieved from the previously mentioned electronic research sources, along with 13 records identified through snowball sampling. After eliminating duplicates, 856 papers were left. Screening the titles and abstracts led to the exclusion of 649 items. Of the 197 articles that remained, 73 did not fulfil the inclusion criteria. The selection process is illustrated in the PRISMA flowchart (Figure 1).
Appendix A provides a comprehensive list of the 124 papers that were included in this review. Alongside each entry, key characteristics are detailed, including the surgical platform used, the surgical specialty, the publication year, and the country of origin.
This section is dedicated to presenting the findings of the review. The first paragraph (Section 3.1) offers an in-depth analysis of the characteristics of the studies under consideration, highlighting important aspects of their methodologies. In the second paragraph (Section 3.2), a summary of the technical features of each platform is provided, allowing for a comparative analysis that underscores the distinctions and similarities among them.
3.1. Studies Characteristics
Among the studies included in this review, there were 22 case reports [19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40], 73 non-comparative studies [41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113], and 27 comparative studies [114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135,136,137,138,139,140,141,142]. In the majority of the comparative studies, the Da Vinci robot served as the primary comparator (n = 23), though in some cases, traditional laparoscopy (n = 6) and open surgery (n = 1) were also used. Of the comparative studies, only 4 were randomized controlled trials (RCTs).
Considering the studies included in this review, the total number of patients that are treated with the new platforms is 4993. The reported cases belong to different surgical specialties: general surgery [19,20,21,22,24,26,34,35,37,39,41,42,44,45,46,47,48,51,53,55,60,62,64,67,69,74,79,82,84,85,86,87,91,93,100,101,102,103,105,107,112,115,116,117,118,119,120,124,128,137,138,139], urology [23,25,28,30,33,36,40,49,54,56,58,59,63,66,68,71,72,73,75,76,77,78,80,83,89,90,92,94,95,96,97,98,99,104,109,110,111,113,114,121,123,125,126,127,129,130,131,132,133,134,135,136,140,141,142], gynecology [27,29,31,32,38,43,50,52,57,61,70,81,88,106,108,122]. Table 1 reports the number of patients treated with the new surgical platform divided by specialty.
The majority of the papers included in the review are studies conducted in Italy (n = 24), Japan (n = 20), China (n = 18), Belgium (n = 7) and Germany (n = 7). Figure 2 reports the number of papers for each country.
3.2. Surgical Robotic Platforms
In this section, the new surgical robotic platforms are described, and a technical comparison is reported.
Table 2 reports the main information about the surgical robotic platforms that are included in this review.
3.2.1. Senhance®
The Senhance® Surgical System [143], developed by TransEnterix Surgical, Inc., is a robotic platform designed to improve precision and control in minimally invasive surgeries. Launched in 2017 after receiving FDA clearance and CE Mark approval in 2016, Senhance® (Figure 5) was introduced as a cost-effective alternative to systems like the da Vinci Surgical System [127,141]. It incorporates unique features such as haptic feedback, which provides tactile sensations to the surgeon, and eye-tracking camera control, allowing hands-free camera manipulation based on the surgeon’s gaze.
The system uses standard laparoscopic ports, which reduces the learning curve for surgeons accustomed to traditional laparoscopy and makes conversion to standard surgery easier if needed. Reusable instruments significantly lower operational costs [127,141], a key advantage over other robotic systems that rely on expensive disposable tools. Senhance® also features an open cockpit design, where the surgeon sits in a comfortable, ergonomic position at the console, reducing physical strain during long procedures.
Senhance®‘s multi-arm robotic design offers versatility in a wide range of surgeries, including general surgery, gynaecology and urology. Clinical studies and case reports have demonstrated its safety and feasibility [24,25,44,56,91], including its use in procedures such as laparoscopic gastrectomy for gastrointestinal tumours and robotic sigmoidectomy for colon cancer. The system is used in the United States, Europe, and Asia, with notable uptake in Japan following regulatory approval in 2019.
3.2.2. Revo-i®
The Revo-i® (Figure 4) robotic surgical system, developed by South Korean company Meerecompany, was launched in 2017 [144]. It provides an affordable alternative to other robotic systems like the da Vinci [114,128], to offer lower costs. The system includes a master console that the surgeon operates, translating their movements into the robotic arms for precise, minimally invasive surgeries. The Revo-i® provides high-definition 3D visualization for enhanced depth perception and magnified views during surgery [20,48].
The system’s robotic arms offer 7 degrees of freedom, allowing for flexibility in instrument movements, mimicking the natural movements of a human wrist. Additionally, the system features haptic feedback, enabling surgeons to feel tactile sensations, and enhancing precision during tissue manipulation. The Revo-i® is equipped with advanced optical control and camera-hopping technology, enabling the surgeon to adjust views dynamically during the procedure.
Cost efficiency is a key benefit, as the system incorporates reusable instruments [48], significantly reducing the cost per procedure compared to other robotic platforms. The clutching mechanism allows the surgeon to reposition instruments without moving the robotic arms, and this process is operated via finger or foot pedals.
Revo-i® is used in various surgical fields, including urology, gynecology general surgery, and thoracic surgery.
2.3.3. Micro Hand S
The Micro Hand S surgical system represents a significant advancement in minimally invasive surgical technology, developed domestically in China. Launched in clinical trials between 2017 and 2019, it was designed to meet the growing demand for precision and efficacy in surgeries, particularly in the realm of robotic-assisted procedures [19,120].
One of the standout features of the Micro Hand S is its articulated robotic arms, which offer seven degrees of freedom. This flexibility allows surgeons to perform intricate manoeuvres that would be challenging with traditional laparoscopic tools. Coupled with 3D visualization capabilities, the system enhances depth perception and spatial awareness, crucial for delicate operations.
The design also prioritizes ergonomics. The surgeon’s console is crafted for comfort, enabling prolonged use without the physical strain that can accompany lengthy procedures. This focus on user experience is complemented by features such as tremor reduction and motion scaling, which help mitigate hand tremors and allow for greater control over instrument movements. Such advancements are particularly beneficial in surgeries where precision is paramount.
Clinical evaluations comparing the Micro Hand S to established robotic systems, such as the da Vinci, have shown promising results [116,117]. Although the operative time was slightly longer than laparoscopic techniques [119], the quality of surgical outcomes remained high, with a notable increase in sphincter-preserving procedures.
2.3.4. HugoTM
The Hugo™ Robotic-Assisted Surgery system (Figure 5) [145], developed by Medtronic, represents a significant advancement in minimally invasive surgical technology. Launched in Europe in March 2022, the system has received CE approval for various applications, including gynaecological and urological surgeries.
One of the defining features of the Hugo™ RAS system is its modular design, which allows for flexible configurations depending on the surgical procedure. It can accommodate setups with three or four robotic arms, enhancing the versatility of the surgical approach. The open console design is another notable aspect; it provides a 3D high-definition visualization system that allows both the surgeon and observers to view the surgical field simultaneously. This is particularly beneficial for training and collaborative surgical environments.
The system is equipped to support a variety of instruments, such as bipolar graspers, monopolar scissors, and needle drivers, all designed to enhance surgical precision. Its docking configurations, including the “compact” and “bridge” setups, allow for optimal access to different anatomical areas, reducing the likelihood of instrument collisions—a common challenge in robotic surgery.
While early experiences with the Hugo™ system have shown promising results, including significant symptom relief in procedures such as robotically assisted endometriosis surgery [29,108], further research is needed to compare its effectiveness against established robotic platforms like the da Vinci system [122,129,131,132]. Overall, the Hugo™ RAS system represents a valuable tool for surgeons seeking to enhance their capabilities in complex surgical scenarios.
2.3.5. HinotoriTM
The Hinotori™ Surgical Robot System (Figure 6), developed by Medicaroid Inc., marks a significant advancement in robotic surgical technology, particularly within Japan. Launched in 2020 and receiving clinical approval in November 2022, the HinotoriTM system is designed to enhance surgical precision and patient outcomes in minimally invasive procedures, such as robotic gastrectomy and colorectal surgeries.
One of the distinguishing features of the HinotoriTM system is its closed console design, which creates a stable and immersive environment for surgeons. This setup allows for a high-definition 3D visualization of the surgical field, utilizing a 16:9 monitor that expands the surgeon’s view compared to traditional systems. The robotic arms feature eight axes of movement, enabling greater flexibility and reducing the risk of interference between instruments. This enhanced manoeuvrability is crucial during complex procedures, where precision is paramount.
HinotoriTM also integrates advanced imaging capabilities, including fluorescence imaging, which helps in identifying critical structures and assessing tissue viability during surgery. While the system currently lacks haptic feedback and eye-tracking features, its ergonomic design and intuitive controls contribute to a more comfortable surgical experience.
Despite being a newer entrant in the market, HinotoriTM has demonstrated its potential through successful clinical applications[34,89,125,126]. It has gained acceptance in Japan, where it was specifically developed to address the growing demand for robotic surgeries. The system’s pricing is notably lower than that of its primary competitor, the da Vinci system [126,140], which may facilitate wider adoption and accessibility in surgical settings.
2.3.6. KangDuo
The KangDuo Surgical System (Figure 7), developed by Kangduo Medical Robotics Co., Ltd., was launched in 2019 and is based in China. This innovative robotic surgical platform is designed to enhance the precision and effectiveness of minimally invasive surgeries across various medical fields, including general, urological, and gynaecological procedures [33,49,123,136].
One of the standout features of the KangDuo system is its high-definition imaging capabilities. While it does not include 3DHD vision, the system provides clear, detailed visuals that are crucial for surgeons during complex operations. The ergonomic design of the surgical console allows for optimal comfort and control, enabling surgeons to perform intricate tasks with improved dexterity.
The system’s robotic arms are engineered for superior manoeuvrability, allowing surgeons to navigate through the surgical site with precision. This enhances the ability to perform delicate procedures while minimizing trauma to surrounding tissues. Additionally, the KangDuo system includes advanced fluorescence imaging technology, which aids in the visualization of critical structures and tissues during surgery, improving surgical outcomes.
With a focus on user experience, the KangDuo also features haptic feedback, providing surgeons with tactile sensations that simulate the feel of traditional surgery. This feedback is essential for maintaining control and accuracy. The inclusion of eye-tracking technology further enhances the system’s usability, allowing surgeons to maintain focus and precision throughout the procedure.
The KangDuo Surgical System is CE marked, indicating its compliance with European health and safety standards, and it is commercially available, making it a competitive option in the field of robotic surgery. Its affordability and versatility make it an attractive choice for hospitals and surgical centres looking to adopt robotic-assisted techniques.
2.3.7. Versius®
The Versius® Surgical Robotic System [145] (Figure 8), developed by CMR Surgical, is a cutting-edge platform designed to enhance the precision and accessibility of minimally invasive surgeries. Launched in 2019, Versius® has gained recognition for its innovative approach to robotic surgery, offering several advantages over traditional systems.
One of the defining features of Versius® is its modular and flexible design. Unlike conventional robotic systems, which are often bulky and confined to specific setups, Versius® consists of independent robotic arms that can be arranged around the patient as needed. This flexibility allows it to adapt to various surgical environments, making it suitable for a wide range of procedures, including colorectal, urological, gynaecological, thoracic, and general surgeries.
The system is controlled by a surgeon console, which provides a high-definition 3D view of the surgical site and hand-held controllers that mimic the natural movements of the human hand. This precise control allows for intricate procedures with improved dexterity and range of motion compared to standard laparoscopic methods. Versius® was designed with surgeon ergonomics in mind, offering a seated position at the console to reduce fatigue during lengthy operations—a significant improvement over older systems.
2.3.8. Avatera
The Avatera robotic system [146], launched in 2021 by the German company Avatera Medical GmbH, represents a major advancement in robotic-assisted surgery. Designed with both precision and ease of use in mind, this system offers surgeons enhanced control over minimally invasive procedures, aiming to improve patient outcomes while reducing surgical complexity.
At its core, the Avatera system features a modular design comprising a surgeon’s console and a surgical unit with robotic arms. The console’s slender eyepiece is ergonomically designed to allow the surgeon to maintain visual contact with the operating room team, fostering improved communication throughout procedures. This open design differentiates Avatera from other robotic systems that require the surgeon to be more isolated while operating.
One of the key innovations of the Avatera system is its use of single-use instruments. These disposable instruments not only ensure sterility for every procedure but also significantly reduce the risks associated with cross-contamination and infection. The robotic arms, equipped with seven degrees of freedom, provide surgeons with precise control for intricate tasks such as suturing and dissection, offering a high level of dexterity. The system supports 5 mm trocars, enabling less invasive access points for surgeries, thus promoting quicker recovery times for patients.
Additionally, the system operates on bipolar energy, which ensures safer tissue manipulation by minimizing the depth of energy penetration and reducing potential damage to surrounding tissues. This safety feature makes the Avatera system particularly appealing for complex surgeries.
With its compact, flexible setup and focus on ergonomics, safety, and accessibility, Avatera is positioned as a cost-effective alternative to existing robotic systems [68], offering a more streamlined and efficient solution for hospitals and surgical teams aiming to adopt robotic technology.
2.3.9. Dexter
The Dexter Robotic System [147], developed by Distalmotion SA in Switzerland and launched in 2020, is a groundbreaking robotic platform designed to enhance minimally invasive surgery. Unlike fully robotic systems that often replace traditional laparoscopic methods, Dexter offers a hybrid approach, combining the precision of robotics with the flexibility of standard laparoscopy. This on-demand setup allows surgeons to seamlessly switch between robotic and manual control, optimizing workflow and reducing procedure times.
Dexter’s system consists of a sterile surgeon console, two patient carts, and a robotic endoscope arm. The robotic arms feature seven degrees of freedom and a 75-degree angulation, providing a wide range of motion and high dexterity, critical for intricate procedures like suturing or central vascular dissection. The endoscope arm is fully compatible with any 3D endoscopic system, allowing surgeons complete control of camera navigation from the console while ensuring stability and image clarity.
One of Dexter’s significant advantages is its open platform design, allowing integration with existing operating room equipment, including insufflation devices, and 3D optics. This flexibility eliminates the need for specialized or proprietary tools, reducing costs and making it easier to implement in various surgical environments. Additionally, the system uses single-use instruments, such as needle holders and graspers, ensuring sterility and reliability during each procedure.
A key feature of Dexter is its ability to switch between robotic and laparoscopic modes in seconds [69]. The robotic arms can be folded back at the press of a button, providing space for traditional laparoscopic tools and techniques without undocking the robot. This seamless transition is particularly useful in colorectal and gynaecological surgeries, where certain tasks may be performed more efficiently through laparoscopy, while others benefit from robotic precision.
2.3.10. Mantra
The SSI Mantra Surgical System [148]is a groundbreaking robotic surgical platform launched in 2023 by SS Innovations. Designed to enhance the efficiency and effectiveness of minimally invasive surgeries, the Mantra system represents a significant advancement in surgical technology, aiming to make robotic surgery more accessible and cost-effective.
One of the standout features of the Mantra system is its wristed instruments, which offer unparalleled dexterity. This allows surgeons to perform intricate movements with greater precision, particularly in confined spaces. Coupled with a high-definition three-dimensional camera system, the platform provides enhanced visualization, ensuring that surgeons have a clear and comprehensive view of the surgical field. This combination of advanced instruments and superior optics facilitates complex procedures that may be challenging with traditional laparoscopic techniques.
The port placement flexibility of the Mantra system is another significant advantage. By allowing meticulous placement of ports, the system maximizes the working space and minimizes the risk of complications. This feature is particularly beneficial during procedures like robotic transabdominal pre-peritoneal (rTAPP) hernia repairs [93], where precise manoeuvring is crucial.
A key aspect of the SSI Mantra Surgical System is its focus on cost-effectiveness. Robotic surgeries have traditionally been associated with high costs, which can limit their availability in many healthcare settings. The Mantra system addresses this concern by providing similar benefits to other robotic platforms at a significantly lower price point. This affordability has the potential to democratize access to robotic surgery, making it a viable option for a broader range of patients.
As the medical community begins to evaluate the long-term implications of the SSI Mantra system, early experiences suggest it is a promising tool for enhancing surgical outcomes while reducing costs. Continued research will be essential to fully understand its advantages and to establish its role in the evolving landscape of robotic surgery.
2.3.11. Toumai®
The Toumai® surgical robotic platform is a cutting-edge system developed by Shanghai MicroPort MedBot (Group) Co., Ltd., a prominent Chinese company specializing in medical robotics. Introduced in the early 2020s, the platform represents a significant advancement in robotic-assisted surgery, particularly in the field of urology, and is poised to offer an affordable alternative to the dominant da Vinci robotic system.
The Toumai® system operates on a master-slave model, where the surgeon controls the robotic arms from a closed console. This setup allows for precision and dexterity during complex procedures, such as nephrectomies (both partial and radical) and radical prostatectomies. The system includes four robotic arms mounted on a cart, which can manipulate instruments with high accuracy.
The platform is equipped with high-definition 3D optics, providing the surgeon with a magnified, immersive view of the surgical field. However, details such as haptic feedback and camera-hopping technology are not disclosed, though these are common in modern surgical robotics to enhance the precision of procedures. The docking time for surgeries was reported to be efficient, with a median of 20-22 minutes depending on the type of procedure, and no major robotic malfunctions were observed [94].
2.3.12. Technical Comparison
Table 3 reports a comparison between the different robotic platforms from a technical point of view.
All the robots included in the review have a multiport architecture.
Six robotic platforms (Revo-i®, Micro Hand S, Toumai®, Avatera, HinotoriTM, and KangDuo) feature a single patient cart equipped with 3 to 4 robotic arms. In contrast, other systems utilize a modular multi-arm design, where each cart supports a single robotic arm, providing greater flexibility during surgery.
Most robotic surgical systems (Revo-i®, Toumai®, Avatera, Versius®, KangDuo, HugoTM, Dexter, and Mantra) use an open console for surgeon vision, allowing the surgeon to remain engaged with the operating room environment. Micro Hand S, however, features a closed console similar to the Da Vinci systems, where the surgeon’s face is fully immersed in the vision system for a more immersive experience. Meanwhile, the HinotoriTM and Senhance® platforms offer a semi-open console design, which includes a visor, enabling the surgeon to maintain communication with the operating room staff while still benefiting from focused visual guidance.
4. Discussion
The evolution of surgical robotics has dramatically transformed the realm of minimally invasive surgery over the past two decades, particularly with the significant impact of the Da Vinci system by Intuitive Surgical [1,2,3,4,13,14]. Initially dominating the market due to its advanced capabilities and comprehensive regulatory approvals, the Da Vinci system has established a high standard that upcoming robotic platforms now seek to challenge [2,13,14,15,16]. Since the expiration of critical patents in 2019, a wave of new surgical robots has emerged, driven by technological advancements and the need for more cost-effective solutions. Many companies have developed innovative systems, some of which have already secured CE marking in Europe and have already obtained FDA approval. In some cases, the new robotic platforms include technological innovation. For instance, the Senhance® system [43,56] incorporates eye-tracking and haptic feedback, features that could enhance surgeon control and precision compared to the Da Vinci system, which notably lacks such advancements. This indicates a shift towards more ergonomic designs that prioritize user experience alongside clinical efficacy.
Furthermore, the design philosophies of newer platforms highlight a significant departure from the centralized multi-arm configuration characteristic of Da Vinci. Systems like CMR’s Versius® [85,109] exemplify a modular approach that enhances flexibility in surgical settings, allowing surgeons to adapt robotic assistance to the specific needs of each operation. This modularity could be particularly beneficial in specialties such as colorectal and hepatobiliary surgery, where the complexity of procedures demands precise movements. Miniaturization of the system has also become a focal point, introducing compact robots designed for portability and ease of use. Such innovations could democratize access to robotic surgery, especially in smaller medical facilities that may not have the resources to accommodate larger, more expensive systems.
Despite these advancements, several challenges remain in evaluating the clinical efficacy and economic impact of these new robotic platforms. While recent reviews indicate that many surgical procedures performed with these systems have minimal adverse events, the existing studies often feature small sample sizes and lack long-term follow-up data, making it difficult to ascertain definitive conclusions regarding their efficacy. The number of randomized controlled trials in this area must be increased to provide a more robust evidence base for clinical practices. Furthermore, there is a pressing need for comprehensive cost analyses, safety evaluations, and studies assessing the organizational impact of adopting these new robotic systems.
The need for standardized training and credentialing programs presents another significant hurdle for the adoption of these new robotic platforms. While the Da Vinci system has established pathways for training, many of the newer systems lack a universal framework for assessing and certifying surgeon proficiency. This inconsistency raises concerns about skill transferability across platforms, which may complicate the integration of multiple robotic systems within hospitals. Efforts to develop simulation-based training and proctoring for new robots are encouraging but require further validation to ensure comprehensive adoption.
Looking ahead, the future of robotic surgery promises continued innovation, particularly with the integration of artificial intelligence and machine learning capabilities. As these technologies evolve, they may significantly enhance the capabilities of robotic surgery, ultimately leading to better patient outcomes and more efficient surgical practices. In summary, while the Da Vinci system remains a cornerstone of robotic surgery, the emergence of new platforms introduces possibilities and challenges that could reshape the future of surgical interventions. However, to realize the full potential of these new robotic systems, further rigorous research is essential, particularly in RCTs and comprehensive analyses covering costs, safety, and organizational impacts.
In conclusion, the emergence of new robotic surgery platforms presents significant advantages for market competition, potentially leading to reduced costs and continuous technological advancements.
Author Contributions
Conceptualization, P.P. and V.C.; formal analysis, V.C.; writing—original draft preparation, P.P. and V.C.; writing—review and editing, P.P., V.C., U.N., C.L., I.G., G.P., F.S., A.P., R.M.; supervision, P.P., V.C., U.N., C.L., I.G., G.P., F.S., A.P., R.M.; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A

| Source | Year | Surgical platform | Surgical specialty | Country |
|---|---|---|---|---|
| Yi, B., et al.[19] | 2016 | Micro Hand S | General surgery | China |
| Ku, G., et al. [20] | 2020 | Revo-i | General surgery | South Korea |
| Kang, I., et al.[21,22] | 2020 | Revo-i | General surgery | South Korea |
| Kondo, H., et al. [22] | 2020 | Senhance | General surgery | Japan |
| Kanego, G., et at. [23] | 2021 | Senhance | Urology | Japan |
| Minagawa, Y., et al. [24] | 2021 | Senhance | General surgery | Japan |
| Sugita, H., et al. [25] | 2021 | Senhance | General surgery | Japan |
| Hirano, Y., et al. [26] | 2021 | Senhance | General surgery | Japan |
| Monterossi, G., et al. [27] | 2022 | Hugo | Gynecology | Italy |
| Böhlen, D., et al. [28] | 2023 | Dexter | Urology | Switzerland |
| Pavone, M., et al. [29] | 2023 | Hugo | Gynecology | Italy |
| Mottaran, A., et al. [30] | 2023 | Hugo | Urology | Belgium |
| Panico, G., et al. [31] | 2023 | Hugo | Urogynecology | Italy |
| Campagna, G., et al. [32] | 2023 | Hugo | Gynecology | Italy |
| Chen, S., et al. [33] | 2023 | KangDuo | Urology | China |
| Miura, R., et al. [34] | 2023 | Hinotori | General surgery | Japan |
| Miyo, M., et al. [35] | 2023 | Hinotori | General surgery | Japan |
| Alkatout, I., et al. [36] | 2024 | Dexter | Gynecology | Germany |
| Formisano, G., et al. [37] | 2024 | Hugo | General surgery | Italy |
| Komatsu, H., et al. [38] | 2024 | Hugo | Gynecology | Japan |
| Tomihara, K., et al. [39] | 2024 | Hinotori | General surgery | Japan |
| Hayashi, T., et al. [40] | 2024 | Hinotori | Urology | Japan |
| Spinelli, A., et al. [41] | 2017 | Senhance | General Surgery | Italy |
| Stephan, D., et al. [42] | 2018 | Senhance | General surgery | Germany |
| Montlouis-Calixte, J., et al. [43] | 2019 | Senhance | Gynecology and General surgery | France |
| Melling, N., et al. [44] | 2019 | Senhance | General surgery | Germany |
| Yao, Y., et al. [45] | 2020 | Micro Hand S | General surgery | China |
| Li, J., et al. [46] | 2020 | Micro Hand S | General surgery | China |
| Samalavicius, N.E., et al. [47] | 2020 | Senhance | General Surgery, Gynecology, Urology | Lithuania |
| Lim, J.H., et al. [48] | 2021 | Revo-I | General Surgery | South Korea |
| Fan, S., et al. [49] | 2021 | Kangduo | Urology | China |
| Puntamberkar, S.P., et al. [50] | 2021 | Versius | Gynecology | india |
| Collins, D., et al. [51] | 2021 | Versius | General surgery | UK |
| Kelkar, D., et al. [52] | 2021 | Versius | Gynecology and General surgery | India |
| Dixon, F., et al. [53] | 2021 | Versius | General surgery | UK |
| Kastelan, Z., et al. [54] | 2021 | Senhance | Urology | Croatia |
| Lin, C.C., at al. [55] | 2021 | Senhance | General surgery | Taiwan |
| Venckus, R., et al. [56] | 2021 | Senhance | Urology | Lithuania |
| Siaulys, R., et al. [57] | 2021 | Senhance | Gynecology | Lithuania |
| Bravi, C.A., et al. [58] | 2022 | Hugo | Urology | Belgium |
| Fan, S., et al. [59] | 2022 | Kangduo | Urology | China |
| Puntamberkar, S.P., et al. [60] | 2022 | Versius | General surgery | UK |
| Borse, M., et al. [61] | 2022 | Versius | Gynecology | India |
| Puntambekar, S., et al. [62] | 2022 | Versius | General surgery | India |
| Knežević, N., et al. [63] | 2022 | Senhance | Urology | Croatia |
| Sasaki, M., et al. [64] | 2022 | Senhance | General surgery | Japan |
| Samalavicius, N.E., et al. [65] | 2022 | Senhance | General surgery | Lithuania |
| Sassani, J.C., et al. [66] | 2022 | Senhance | Urology | USA |
| Samalavicius, N.E., et al. [67] | 2022 | Senhance | General surgery | Multiple (Europe: Germany, Belarus, Lithuania) |
| Kallidonis, P., et al. [68] | 2023 | Avatera | Urology | Grece |
| Hahnloser, D., et al. [69] | 2023 | Dexter | general surgery | Switzerland. |
| Monterossi, G., et al. [70] | 2023 | Hugo | Gynecology | Italy |
| Bravi, C.A., et al. [71] | 2023 | Hugo | Urology | Belgium |
| Gallioli, A., et al. [72] | 2023 | Hugo | Urology | Spain |
| Territo, A., et al. [73] | 2023 | Hugo | Urology | Spain |
| Bianchi, P.P., et al. [74] | 2023 | Hugo | General surgery | Italy |
| Paciotti, M., et al. [75] | 2023 | Hugo | Urology | Belgium |
| Marques-Monteiro, M., et al. [76] | 2023 | Hugo | Urology | Portugal |
| Ou, Y.C., et al. [77] | 2023 | Hugo | Urology | Taiwan |
| Elorrieta, V., et al. [78] | 2023 | Hugo | Urology | Chile |
| Belyaev, O., et al. [79] | 2023 | Hugo | General surgery | Germany |
| Alfano, C.G., et al. [80] | 2023 | Hugo | Urology | USA |
| Panico, G., et al. [81] | 2023 | Hugo | Urogynecology | Italy |
| Raffaelli, M., et al. [82] | 2023 | Hugo | General surgery | Italy |
| Xiong, S., et al. [83] | 2023 | Kangduo | Urology | China |
| Dong, J., et al. [84] | 2023 | Kangduo | General surgery | China |
| Kelkar, D.S., et al. [85] | 2023 | Versius | General surgery | UK |
| Wehrmann, S., et al. [86] | 2023 | Versius | General surgery | Germany |
| El Dahdad, J., et al. [87] | 2023 | Versius | General surgery | United Arab Emirates |
| Togami, S., et al. [88] | 2023 | Hinotori | Gynecological Surgery | Japan |
| Motoyama, D., et al. [89] | 2023 | Hinotori | Urology | Japan |
| Hudolin, T., et al. [90] | 2023 | Senhance | Urology | Croatia |
| Sasaki, T., et al. [91] | 2023 | Senhance | General surgery | Japan |
| Thillou, D., et al. [92] | 2024 | Dexter | Urology | France |
| Mehrotra, M., et al. [93] | 2024 | Mantra | General surgery | India |
| Pokhrel, G., et al. [94] | 2024 | Toumai | Urology | China |
| Prata, F., et al. [95] | 2024 | Hugo | Urology | Italy |
| Dell’Oglio, P., et al. [96] | 2024 | Hugo | Urology | Italy |
| Totaro, A., et al. [97] | 2024 | Hugo | Urology | Italy |
| Takahara, K., et al. [98] | 2024 | Hugo | Urology | Japan |
| Prata, F., et al. [99] | 2024 | Hugo | Urology | Italy |
| Prata, F., et al. [142] | 2024 | Hugo | Urology | Italy |
| Caputo, D., et al. [100] | 2024 | Hugo | General surgery | Italy |
| Belyaev, O., et al. [101] | 2024 | Hugo | General surgery | Germany |
| Jebakumar, S.G.S, et al. [102] | 2024 | Hugo | General surgery | India |
| Caputo, D., et al. [103] | 2024 | Hugo | General surgery | Italy |
| Andrede, G.M., et al. [104] | 2024 | Hugo | Urology | Brazil |
| Salem, S.A., et al. [105] | 2024 | Hugo | General surgery | Israel |
| Gioè, A., et al. [106] | 2024 | Hugo | Gynecology | Italy |
| Quezada, N., et al. [107] | 2024 | Hugo | General surgery | Chile |
| Pavone, M., et al. [108] | 2024 | Hugo | Gynecology | Italy |
| Dibitetto, F., et al. [109] | 2024 | Versius | Urology | Italy |
| Meneghetti, I., et al. [110] | 2024 | Versius | Urology | Italy |
| De Maria, M., et al. [111] | 2024 | Versius | Urology | Italy |
| Inoue, S., et al. [112] | 2024 | Hinotori | General surgery | Japan |
| Kulis, T., et al. [113] | 2024 | Senhance | Urology | Lithuania, Croatia |
| Chang, K.D., et al. [114] | 2018 | Revo-I | Urology | South Korea |
| Aggarwal, R., et al. [115] | 2020 | Senhance | General surgery | UK |
| Zeng, Y., et al. [116] | 2021 | Micro Hand S | General Surgery | China |
| Wang, Y., et al. [118] | 2021 | Micro Hand S | General surgery | China |
| Jiang, J., et al. [117] | 2021 | Micro Hand S | General surgery | China |
| Wang, Y., et al. [120] | 2022 | Micro Hand S | General Surgery | China |
| Lei, Y., et al. [119] | 2022 | Micro Hand S | General surgery | China |
| Kulis, T., at al. [121] | 2022 | Senhance | Urology | Croatia |
| Collà Ruvolo, C., et al. [122] | 2023 | Hugo | Gynecology | Belgium |
| Li, X., et al. [123] | 2023 | Kangduo | Urology | China |
| Motoyama, D., et al. [124] | 2023 | Hinotori | general surgery | Japan |
| Motoyama, D., et al. [125] | 2023 | Hinotori | Urology | Japan |
| Motoyama, D., et al. [126] | 2023 | Hinotori | Urology | Japan |
| Glass Clark, S., et al. [127] | 2023 | Senhance | Urology | USA |
| Kim, J.S., et al. [128] | 2024 | Revo-I | General Surgery | South Korea |
| Bravi, C.A., et al. [129] | 2024 | Hugo | Urology | Belgium |
| Balestrazzi, E., et al. [130] | 2024 | Hugo | Urology | Belgium |
| Brime Menendez, R., et al. [131] | 2024 | Hugo | Urology | Spain |
| Ou, H.C., et al. [132] | 2024 | Hugo | Urology | Taiwan |
| Prata, F., et al. [133] | 2024 | Hugo | Urology | Italy |
| Grandi, C., et al. [134] | 2024 | Hugo | Urology | Italy |
| Antonelli, A., et al. [135] | 2024 | Hugo | Urology | Italy |
| Shen, C., et al. [136] | 2024 | Kangduo | Urology | China |
| Sun, Z., et al. [137] | 2024 | Kangduo | General surgery | China |
| Liu, Y., et al. [138] | 2024 | Kangduo | General surgery | China |
| Halabi, M., et al. [139] | 2024 | Versius | General surgery | United Arab Emirates |
| Kohjimoto, Y., et al. [140] | 2024 | Hinotori | Urology | Japan |
| Lin, Y.C., et al. [141] | 2024 | Senhance | Urology | Taiwan |
References
- Zhang, X.; Ma, X.; Zhou, J.; Zhou, Q. Summary of medical robot technology development. Proceedings of 2018 IEEE International Conference on Mechatronics and Automation, ICMA 2018, pp. 443–448, Oct. 2018. [CrossRef]
- Cepolina, F.; Razzoli, R.P. An introductory review of robotically assisted surgical systems. Int J Med Robot 2022, 18. [Google Scholar] [CrossRef]
- Chatterjee, S.; Das, S.; Ganguly, K.; Mandal, D. Advancements in robotic surgery: innovations, challenges and future prospects. Dec. 01, 2024, Springer Nature. [CrossRef]
- Reddy, K.; Gharde, P.; Tayade, H.; Patil, M.; Reddy, L.S.; Surya, D. Advancements in Robotic Surgery: A Comprehensive Overview of Current Utilizations and Upcoming Frontiers. Cureus, Dec. 2023. [CrossRef]
- Ashrafian, H.; Clancy, O.; Grover, V.; Darzi, A. The evolution of robotic surgery: Surgical and anaesthetic aspects. in British Journal of Anaesthesia, Oxford University Press, Dec. 2017, pp. i72–i84. [CrossRef]
- Kutana, S.; Bitner, D.P.; Addison, P.; Chung, P.J.; Talamini, M.A.; Filicori, F. Objective assessment of robotic surgical skills: review of literature and future directions. Jun. 01, 2022, Springer. [CrossRef]
- Picozzi, P.; Nocco, U.; Puleo, G.; Labate, C.; Cimolin, V. Telemedicine and Robotic Surgery: A Narrative Review to Analyze Advantages, Limitations and Future Developments. Jan. 01, 2024, Multidisciplinary Digital Publishing Institute (MDPI). [CrossRef]
- Almujalhem, A.; Rha, K.H. Surgical robotic systems: What we have now? A urological perspective. BJUI Compass, 2020. [CrossRef]
- Rao, R.; Nayyar, R.; Panda, S.; Hemal, A.K. Surgical techniques: Robotic bladder diverticulectomy with the da Vinci-S surgical system. J Robot Surg 2007, 1, 217–220. [Google Scholar] [CrossRef]
- Rivero-Moreno, Y.; et al. Robotic Surgery: A Comprehensive Review of the Literature and Current Trends. Cureus 2023. [Google Scholar] [CrossRef]
- Fairag, M.; et al. Robotic Revolution in Surgery: Diverse Applications Across Specialties and Future Prospects Review Article. Cureus 2024. [Google Scholar] [CrossRef]
- Trute, R.J.; Zapico, C.S.; Christou, A.; Layeghi, D.; Craig, S.; Erden, M.S. Development of a Robotic Surgery Training System. Front Robot AI 2022, 8. [Google Scholar] [CrossRef]
- Simorov, A.; Otte, R.S.; Kopietz, C.M.; Oleynikov, D. Review of surgical robotics user interface: What is the best way to control robotic surgery?. 2012, Springer New York LLC. [CrossRef]
- Guthart, P.G. JPMorgan Healthcare Conference 2023.” Accessed: Sep. 07, 2024. [Online]. Available: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://isrg.intuitive.com/static-files/6683d2bb-75e2-4fa0-b0cd-463ead7c30a4.
- Hughes, T.; Rai, B.; Madaan, S.; Chedgy, E.; Somani, B. The Availability, Cost, Limitations, Learning Curve and Future of Robotic Systems in Urology and Prostate Cancer Surgery. Mar. 01, 2023, Multidisciplinary Digital Publishing Institute (MDPI). [CrossRef]
- Rassweiler, J.J.; et al. Future of robotic surgery in urology. BJU Int 2017, 120, 822–841. [Google Scholar] [CrossRef]
- Biswas, P.; Sikander, S.; Kulkarni, P. Recent advances in robot-assisted surgical systems. Biomedical Engineering Advances 2023, 6, 100109. [Google Scholar] [CrossRef]
- Mehta, A.; et al. Embracing robotic surgery in low- and middle-income countries: Potential benefits, challenges, and scope in the future. Dec. 01, 2022, Elsevier Ltd. [CrossRef]
- Yi, B.; et al. The first clinical use of domestically produced Chinese minimally invasive surgical robot system ‘Micro Hand S,’” Surg Endosc 2016, 30, 2649–2655. [CrossRef]
- Ku, G.; Kang, I.; Lee, W.J.; Kang, C.M. Revo-i assisted robotic central pancreatectomy. Ann Hepatobiliary Pancreat Surg 2020, 24, 547–550. [Google Scholar] [CrossRef]
- Kang, I.; Hwang, H.K.; Lee, W.J.; Kang, C.M. First experience of pancreaticoduodenectomy using Revo-i in a patient with insulinoma. Ann Hepatobiliary Pancreat Surg 2020, 24, 104. [Google Scholar] [CrossRef]
- Kondo, H.; et al. A first case of ileocecal resection using a Senhance Surgical System in Japan. Surg Case Rep 2020, 6. [Google Scholar] [CrossRef]
- Kaneko, G.; Shirotake, S.; Oyama, M.; Koyama, I. Initial experience of laparoscopic radical nephrectomy using the Senhance® robotic system for renal cell carcinoma. Int Cancer Conf J 2021, 10, 228–232. [Google Scholar] [CrossRef]
- Minagawa, Y.; et al. The first single-incision plus one-port transverse colon resection using Senhance Digital Laparoscopy System: a case report. Surg Case Rep 2021, 7. [Google Scholar] [CrossRef]
- Sugita, H.; et al. First experience using the Senhance surgical system in laparoscopic local gastrectomy for gastrointestinal stromal tumor. Asian J Endosc Surg 2021, 14, 790–793. [Google Scholar] [CrossRef]
- Hirano, Y.; Kondo, H.; Miyawaki, Y.; Sugita, H.; Sakuramoto, S.; Yamaguchi, S. Single-incision plus two-port robotic surgery for sigmoid colon cancer using the Senhance robotic system. Asian J Endosc Surg 2021, 14, 94–96. [Google Scholar] [CrossRef]
- Monterossi G; Anchora L, P. ; Alletti S, G.; Fagotti A; Fanfani F; Scambia G, “The first European gynaecological procedure with the new surgical robot HugoTM RAS. A total hysterectomy and salpingo-oophorectomy in a woman affected by BRCA-1 mutation. Facts Views Vis Obgyn 2022, 14, 91–94. [Google Scholar] [CrossRef]
- Böhlen, D.; Gerber, R. First Ever Radical Prostatectomy Performed with the New Dexter Robotic SystemTM. May 01, 2023, Elsevier B.V. [CrossRef]
- Pavone M; Goglia M; Campolo F; Scambia G; MM, I. En-block butterfly excision of posterior compartment deep endometriosis: The first experience with the new surgical robot HugoTM RAS. Facts Views Vis Obgyn 2023, 15, 359–362. [Google Scholar] [CrossRef]
- Mottaran, A.; et al. Robot-assisted simple prostatectomy with the novel HUGOTM RAS System: feasibility, setting, and perioperative outcomes. Minerva Urology and Nephrology 2023, 75, 235–239. [Google Scholar] [CrossRef]
- Panico, G; et al. HUGO(TM) RAS System in urogynaecology: the first nerve sparing Sacral Colpopexy for Pelvic Organ Prolapse. Facts Views Vis Obgyn 2023, 15, 83–87. [Google Scholar] [CrossRef]
- Campagna, G.; et al. Robotic sacrocolpopexy plus ventral rectopexy as combined treatment for multicompartment pelvic organ prolapse using the new Hugo RAS system. Jun. 01, 2023, Springer Science and Business Media Deutschland GmbH. [CrossRef]
- Chen, S.; et al. The application of internal suspension technique in retroperitoneal robot-assisted laparoscopic partial nephrectomy with a new robotic system KangDuo Surgical Robot-01: Initial experience. Asian J Urol 2023, 10, 482–487. [Google Scholar] [CrossRef]
- Miura, R.; et al. World-first report of low anterior resection for rectal cancer with the hinotoriTM Surgical Robot System: a case report. Surg Case Rep 2023, 9. [Google Scholar] [CrossRef]
- Miyo, M.; et al. Right hemicolectomy for ascending colon cancer using the hinotori surgical robot system: The first ever case report for colon cancer. Asian J Endosc Surg 2023, 16, 604–607. [Google Scholar] [CrossRef]
- Alkatout, I; et al. The first robotic-assisted hysterectomy below the bikini line with the Dexter robotic system. Facts Views Vis Obgyn 2024, 16, 87–91. [Google Scholar] [CrossRef]
- Formisano, G.; Ferraro, L.; Salaj, A.; Bianchi, P.P. First report of robotic retromuscular incisional hernia repair with Hugo RasTM surgical system. Updates Surg 2024. [Google Scholar] [CrossRef]
- Komatsu H; Wada I; Harada T; Taniguchi F, “First report of robotic-assisted total hysterectomy using the HugoTM RAS system. Updates Surg 2024, 76, 315–318. [CrossRef]
- Tomihara, K.; Ide, T.; Ito, K.; Tanaka, T.; Noshiro, H. Robotic spleen-preserving distal pancreatectomy using the first domestic surgical robot platform (the hinotoriTM Surgical Robot System): a case report. Surg Case Rep 2024, 10. [Google Scholar] [CrossRef]
- Hayashi, T.; Kitano, H.; Hieda, K.; Hinata, N. First case report of robot-assisted radical cystectomy and intracorporeal urinary diversion using the hinotori Surgical Robot System. Transl Cancer Res 2024, 13, 471–479. [Google Scholar] [CrossRef]
- Spinelli, A.; et al. First experience in colorectal surgery with a new robotic platform with haptic feedback. Colorectal Disease 2018, 20, 228–235. [Google Scholar] [CrossRef]
- Stephan, D.; Sälzer, H.; Willeke, F. First Experiences with the New Senhance® Telerobotic System in Visceral Surgery. Feb. 01, 2018, S. Karger AG. [CrossRef]
- Montlouis-Calixte, J.; Ripamonti, B.; Barabino, G.; Corsini, T.; Chauleur, C. Senhance 3-mm robot-assisted surgery: experience on first 14 patients in France. Oct. 01, 2019, Springer London. [CrossRef]
- Melling, N.; et al. Robotic cholecystectomy: first experience with the new Senhance robotic system. J Robot Surg 2019, 13, 495–500. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, Y.; Li, Z.; Yi, B.; Wang, G.; Zhu, S. Chinese surgical robot micro hand S: A consecutive case series in general surgery. International Journal of Surgery 2020, 75, 55–59. [Google Scholar] [CrossRef]
- Li, J.; Zhu, S.; Juan, J.; Yi, B. Preliminary exploration of robotic complete mesocolic excision for colon cancer with the domestically produced Chinese minimally invasive Micro Hand S surgical robot system. International Journal of Medical Robotics and Computer Assisted Surgery 2020, 16, 1–8. [Google Scholar] [CrossRef]
- Samalavicius, N.E.; et al. Robotic surgery using Senhance® robotic platform: single center experience with first 100 cases. J Robot Surg 2020, 14, 371–376. [Google Scholar] [CrossRef]
- Lim, J.H.; Lee, W.J.; Choi, S.H.; Kang, C.M. Cholecystectomy using the Revo-i robotic surgical system from Korea: the first clinical study. Updates Surg 2021, 73, 1029–1035. [Google Scholar] [CrossRef]
- Fan, S.; et al. Robot-Assisted Radical Prostatectomy Using the KangDuo Surgical Robot-01 System: A Prospective, Single-Center, Single-Arm Clinical Study. Journal of Urology 2022, 208, 119–127. [Google Scholar] [CrossRef]
- Puntambekar, S.P.; et al. Feasibility of robotic radical hysterectomy (RRH) with a new robotic system. Experience at Galaxy Care Laparoscopy Institute. J Robot Surg 2021, 15, 451–456. [Google Scholar] [CrossRef]
- Collins, D.; Paterson, H.M.; Skipworth, R.J.E.; Speake, D. Implementation of the Versius robotic surgical system for colorectal cancer surgery: First clinical experience. Colorectal Disease 2021, 23, 1233–1238. [Google Scholar] [CrossRef]
- Kelkar, D.; Borse, M.A.; Godbole, G.P.; Kurlekar, U.; Slack, M. Interim safety analysis of the first-in-human clinical trial of the Versius surgical system, a new robot-assisted device for use in minimal access surgery. Surg Endosc 2021, 35, 5193–5202. [Google Scholar] [CrossRef]
- Dixon, F.; O’Hara, R.; Ghuman, N.; Strachan, J.; Khanna, A.; Keeler, B.D. Major colorectal resection is feasible using a new robotic surgical platform: the first report of a case series. Tech Coloproctol 2021, 25, 285–289. [Google Scholar] [CrossRef]
- Kastelan, Z.; et al. Upper urinary tract surgery and radical prostatectomy with Senhance® robotic system: Single center experience—First 100 cases. International Journal of Medical Robotics and Computer Assisted Surgery 2021, 17. [Google Scholar] [CrossRef]
- Lin, C.C.; Huang, S.C.; Lin, H.H.; Chang, S.C.; Chen, W.S.; Jiang, J.K. An early experience with the Senhance surgical robotic system in colorectal surgery: a single-institute study. International Journal of Medical Robotics and Computer Assisted Surgery 2021, 17. [Google Scholar] [CrossRef]
- Venckus, R.; et al. Robotic-assisted radical prostatectomy with the Senhance® robotic platform: single center experience. World J Urol 2021, 39, 4305–4310. [Google Scholar] [CrossRef]
- Siaulys, R.; Klimasauskiene, V.; Janusonis, V.; Ezerskiene, V.; Dulskas, A.; Samalavicius, N.E. Robotic gynaecological surgery using Senhance® robotic platform: Single centre experience with 100 cases. J Gynecol Obstet Hum Reprod 2021, 50. [Google Scholar] [CrossRef]
- Bravi, C.A.; et al. Robot-assisted Radical Prostatectomy with the Novel Hugo Robotic System: Initial Experience and Optimal Surgical Set-up at a Tertiary Referral Robotic Center. Eur Urol 2022, 82, 233–237. [Google Scholar] [CrossRef]
- Fan, S.; et al. Robot-assisted pyeloplasty using a new robotic system, the KangDuo-Surgical Robot-01: a prospective, single-centre, single-arm clinical study. BJU Int 2021, 128, 162–165. [Google Scholar] [CrossRef]
- Puntambekar, S.P.; et al. Colorectal cancer surgery: by Cambridge Medical Robotics Versius Surgical Robot System—a single-institution study. Our experience. J Robot Surg 2022, 16, 587–596. [Google Scholar] [CrossRef]
- Borse, M.; Godbole, G.; Kelkar, D.; Bahulikar, M.; Dinneen, E.; Slack, M. Early evaluation of a next-generation surgical system in robot-assisted total laparoscopic hysterectomy: A prospective clinical cohort study. Acta Obstet Gynecol Scand 2022, 101, 978–986. [Google Scholar] [CrossRef]
- Puntambekar, S.; Bharambe, S.; Pawar, S.; Chitale, M.; Panse, M. Feasibility of transthoracic esophagectomy with a next-generation surgical robot. Sci Rep 2022, 12. [Google Scholar] [CrossRef]
- Knezevic, N.; et al. Senhance robot-assisted adrenalectomy: a case series. Croat Med J 2022, 63, 197–201. [Google Scholar] [CrossRef]
- Sasaki, M.; et al. Short-term results of robot-assisted colorectal cancer surgery using Senhance Digital Laparoscopy System. Asian J Endosc Surg 2022, 15, 613–618. [Google Scholar] [CrossRef]
- Samalavicius, N.E.; et al. Robotic colorectal surgery using the Senhance® robotic system: a single center experience. Tech Coloproctol 2022, 26, 437–442. [Google Scholar] [CrossRef]
- Sassani, J.C.; Clark, S.G.; McGough, C.E.; Shepherd, J.P.; Bonidie, M. Sacrocolpopexy experience with a novel robotic surgical platform. Int Urogynecol J 2022, 33, 3255–3260. [Google Scholar] [CrossRef]
- Samalavicius, N.E.; et al. Inguinal hernia TAPP repair using Senhance® robotic platform: first multicenter report from the TRUST registry. Hernia 2022, 26, 1041–1046. [Google Scholar] [CrossRef]
- Kallidonis, P.; et al. Robot-assisted pyeloplasty for ureteropelvic junction obstruction: initial experience with the novel avatera system. World J Urol 2023, 41, 3155–3160. [Google Scholar] [CrossRef]
- Hahnloser, D.; Rrupa, D.; Grass, F. Feasibility of on-demand robotics in colorectal surgery: first cases. Surg Endosc 2023, 37, 8594–8600. [Google Scholar] [CrossRef]
- Monterossi, G; et al. The new surgical robot HugoTM RAS for total hysterectomy: a pilot study. Facts Views Vis Obgyn 2023, 15, 331–337. [Google Scholar] [CrossRef]
- Bravi, C.A.; et al. Outcomes of Robot-assisted Radical Prostatectomy with the Hugo RAS Surgical System: Initial Experience at a High-volume Robotic Center. Eur Urol Focus 2023, 9, 642–644. [Google Scholar] [CrossRef]
- Gallioli, A.; et al. Initial experience of robot-assisted partial nephrectomy with HugoTM RAS system: implications for surgical setting. World J Urol 2023, 41, 1085–1091. [Google Scholar] [CrossRef]
- Territo, A.; et al. Robot-assisted oncologic pelvic surgery with HugoTM robot-assisted surgery system: A single-center experience. Asian J Urol 2023, 10, 461–466. [Google Scholar] [CrossRef]
- Bianchi, P.P.; Salaj, A.; Rocco, B.; Formisano, G. First worldwide report on Hugo RASTM surgical platform in right and left colectomy. Updates Surg 2023, 75, 775–780. [Google Scholar] [CrossRef]
- Paciotti, M.; et al. Nerve-sparing robot-assisted radical prostatectomy with the HUGOTM robot-assisted surgery system using the ‘Aalst technique,’” Aug. 01, 2023, John Wiley and Sons Inc. [CrossRef]
- Marques-Monteiro, M.; et al. Extraperitoneal robot-assisted radical prostatectomy with the HugoTM RAS system: initial experience of a tertiary center with a high background in extraperitoneal laparoscopy surgery. World J Urol 2023, 41, 2671–2677. [Google Scholar] [CrossRef]
- Ou, Y.C.; et al. Robot-assisted radical prostatectomy using hugo RAS system: The pioneer experience in Taiwan and Northeast Asia. International Journal of Medical Robotics and Computer Assisted Surgery 2024, 20. [Google Scholar] [CrossRef]
- Elorrieta, V.; Villena, J.; Kompatzki, Á.; Velasco, A.; Salvadó, J.A. ROBOT Assisted Laparoscopic Surgeries For Nononcological Urologic Disease: Initial Experience With Hugo Ras System. Urology 2023, 174, 118–125. [Google Scholar] [CrossRef]
- Belyaev, O.; Fahlbusch, T.; Slobodkin, I.; Uhl, W. Safety and Feasibility of Cholecystectomy with the HugoTMRAS: Proof of Setup Guides and First-In-Human German Experience. Visc Med 2023, 39. [Google Scholar] [CrossRef]
- Alfano, C.G.; et al. Implementation and outcomes of HugoTM RAS System in robotic-assisted radical prostatectomy. International Braz J Urol 2023, 49, 211–220. [Google Scholar] [CrossRef]
- Panico, G.; et al. The first 60 cases of robotic sacrocolpopexy with the novel HUGO RAS system: feasibility, setting and perioperative outcomes. Front Surg 2023, 10, 75–217. [Google Scholar] [CrossRef]
- Raffaelli, M.; et al. The new robotic platform HugoTM RAS for lateral transabdominal adrenalectomy: a first world report of a series of five cases. Updates Surg 2023, 75, 217–225. [Google Scholar] [CrossRef]
- Xiong, S.; et al. Robotic urologic surgery using the KangDuo-Surgical Robot-01 system: A single-center prospective analysis. Chin Med J (Engl) 2023, 136, 2960–2966. [Google Scholar] [CrossRef]
- Dong, J.; et al. Feasibility, safety and effectiveness of robot-assisted retroperitoneal partial adrenalectomy with a new robotic surgical system: A prospective clinical study. Front Surg 2023, 10, 277–9. [Google Scholar] [CrossRef]
- Kelkar, D.S.; Kurlekar, U.; Stevens, L.; Wagholikar, G.D.; Slack, M. An Early Prospective Clinical Study to Evaluate the Safety and Performance of the Versius Surgical System in Robot-Assisted Cholecystectomy. Ann Surg 2023, 277, 9–17. [Google Scholar] [CrossRef]
- Wehrmann, S.; et al. Clinical implementation of the Versius robotic surgical system in visceral surgery-A single centre experience and review of the first 175 patients. Surg Endosc 2023, 37, 528–534. [Google Scholar] [CrossRef]
- El Dahdah, J.; Halabi, M.; Kamal, J.; Zenilman, M.E.; Moussa, H. Initial experience with a novel robotic surgical system in abdominal surgery. J Robot Surg 2023, 17, 841–846. [Google Scholar] [CrossRef]
- Togami, S.; et al. The first report of surgery for gynecological diseases using the hinotoriTM surgical robot system. Jpn J Clin Oncol 2023, 53, 1034–1037. [Google Scholar] [CrossRef]
- Nakayama, A.; et al. Robot-assisted radical prostatectomy using the novel hinotoriTM surgical robot system: initial experience and operation learning curve at a single institution. Transl Cancer Res 2024, 13, 57–64. [Google Scholar] [CrossRef]
- Hudolin, T.; et al. Senhance robotic radical prostatectomy: A single-centre, 3-year experience. International Journal of Medical Robotics and Computer Assisted Surgery 2023, 19. [Google Scholar] [CrossRef]
- Sasaki, T.; et al. Initial 30 cholecystectomy procedures performed with the Senhance digital laparoscopy system. Asian J Endosc Surg 2023, 16, 225–232. [Google Scholar] [CrossRef]
- Thillou, D.; et al. Robot-assisted Radical Prostatectomy with the Dexter Robotic System: Initial Experience and Insights into On-demand Robotics. Eur Urol 2024, 85, 185–189. [Google Scholar] [CrossRef]
- Mehrotra, M.; Kumar, C.G. Initial experience of SSI Mantra robot-assisted Transabdominal pre-peritoneal repair of primary ventral hernias. J Minim Access Surg, Jul. 2024. [CrossRef]
- Pokhrel, G.; et al. ASSESSING THE FEASIBILITY AND SAFETY OF THE TOUMAIÒ ROBOTIC SYSTEM IN UROLOGIC SURGERY: INITIAL EXPERIENCE.
- Prata, F.; et al. Surgical Outcomes of HugoTM RAS Robot-Assisted Partial Nephrectomy for Cystic Renal Masses: Technique and Initial Experience. J Clin Med 2024, 13. [Google Scholar] [CrossRef]
- Dell’Oglio, P.; et al. Retzius-sparing robot-assisted radical prostatectomy with the HugoTM robot-assisted surgery system: feasibility, operative setup and surgical outcomes. BJU Int 2024. [Google Scholar] [CrossRef]
- Totaro, A.; et al. Robot-Assisted Radical Prostatectomy Performed with the Novel Surgical Robotic Platform HugoTM RAS: Monocentric First Series of 132 Cases Reporting Surgical, and Early Functional and Oncological Outcomes at a Tertiary Referral Robotic Center. Cancers (Basel) 2024, 16. [Google Scholar] [CrossRef]
- Takahara, K.; et al. Robot-assisted radical prostatectomy with the HugoTM robot-assisted surgery system: A single-center initial experience in Japan. Asian J Endosc Surg 2024, 17. [Google Scholar] [CrossRef]
- Prata, F.; et al. Three-arms off-clamp robot-assisted partial nephrectomy with the new Hugo robot-assisted surgery system. Jan. 01, 2024, John Wiley and Sons Inc. [CrossRef]
- Caputo, D.; Farolfi, T.; Molina, C.; Coppola, R. Full robotic cholecystectomy: first worldwide experiences with HUGO RAS surgical platform. ANZ J Surg 2024, 94, 387–390. [Google Scholar] [CrossRef]
- Belyaev, O.; Fahlbusch, T.; Slobodkin, I.; Uhl, W. Use of HugoTM RAS in General Surgery: The First 70 Cases at a German Centre and a Systematic Review of the Literature. Jul. 01, 2024, Multidisciplinary Digital Publishing Institute (MDPI). [CrossRef]
- Jebakumar, S.G.S.; et al. Robotic hernia repair with the novel HUGO robot system – An initial experience from a tertiary centre. J Minim Access Surg 2024. [Google Scholar] [CrossRef]
- Caputo, D.; Cammarata, R.; Farolfi, T.; Coppola, R.; La Vaccara, V. First worldwide report on rectal resections with HugoTM surgical system: description of docking angles and tips for an effective setup. ANZ J Surg 2024. [Google Scholar] [CrossRef]
- Andrade, G.M.; et al. Implementation of Robot-assisted Urologic Surgeries using HugoTM RAS System in a High-volume Robotic ‘Da vinci Xi’ Center: outcomes and initial experience. Urology 2024. [Google Scholar] [CrossRef]
- Salem, S.A.; et al. Robotic Heller’s myotomy using the new HugoTM RAS system: first worldwide report. Surg Endosc 2024, 38, 1180–1190. [Google Scholar] [CrossRef]
- Gioè, A.; et al. The new robotic system HUGO RAS for gynecologic surgery: First European experience from Gemelli Hospital. International Journal of Gynecology and Obstetrics 2024, 166, 258–265. [Google Scholar] [CrossRef]
- Quezada, N.; Irarrazaval, M.J.; Chen, D.C.; Grimoldi, M.; Pimentel, F.; Crovari, F. Robotic transversus abdominis release using HUGO RAS system: our initial experience. Surg Endosc 2024, 38, 3395–3404. [Google Scholar] [CrossRef]
- Pavone, M.; et al. Initial experience of robotically assisted endometriosis surgery with a novel robotic system: first case series in a tertiary care center. Updates Surg 2024, 76, 271–277. [Google Scholar] [CrossRef]
- Dibitetto, F.; et al. Extraperitoneal robot assisted laparoscopic prostatectomy with Versius system: single centre experience. Prostate Cancer Prostatic Dis 2024, 27, 323–326. [Google Scholar] [CrossRef]
- Meneghetti, I.; et al. Partial nephrectomy series using Versius robotic surgical system: technique and outcomes of an initial experience. J Robot Surg 2024, 18. [Google Scholar] [CrossRef]
- De Maria, M.; Meneghetti, I.; Mosillo, L.; Collins, J.W.; Catalano, C. Versius robotic surgical system: case series of 18 robot-assisted radical prostatectomies. BJU Int 2024, 133, 197–205. [Google Scholar] [CrossRef]
- Inoue, S.; et al. First clinical experiences of robotic gastrectomy for gastric cancer using the hinotoriTM surgical robot system. Surg Endosc 2024, 38, 1626–1636. [Google Scholar] [CrossRef]
- Kulis, T.; et al. Robotic-assisted radical prostatectomy: a multicenter experience with the Senhance Surgical System. World J Urol 2024, 42. [Google Scholar] [CrossRef]
- Alip, S.; Koukourikis, P.; Han, W.K.; Rha, K.H.; Na, J.C. Comparing Revo-i and da Vinci in Retzius-Sparing Robot-Assisted Radical Prostatectomy: A Preliminary Propensity Score Analysis of Outcomes. J Endourol 2022, 36, 104–110. [Google Scholar] [CrossRef]
- Aggarwal, R.; Beatty, J.W.; Kinross, J.; von Roon, A.; Darzi, A.; Purkayastha, S. Initial Experience With a New Robotic Surgical System for Cholecystectomy. Surg Innov 2020, 27, 136–142. [Google Scholar] [CrossRef]
- Zeng, Y.; Wang, G.; Li, Z.; Lin, H.; Zhu, S.; Yi, B. The Micro Hand S vs. da Vinci Surgical Robot-Assisted Surgery on Total Mesorectal Excision: Short-Term Outcomes Using Propensity Score Matching Analysis. Front Surg 2021, 8. [Google Scholar] [CrossRef]
- Jiang, J.; Zhu, S.; Yi, B.; Li, J. Comparison of the short-term operative, Oncological, and Functional Outcomes between two types of robot-assisted total mesorectal excision for rectal cancer: Da Vinci versus Micro Hand S surgical robot. International Journal of Medical Robotics and Computer Assisted Surgery 2021, 17. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, G.; Li, Z.; Ling, H.; Yi, B.; Zhu, S. Comparison of the operative outcomes and learning curves between laparoscopic and ‘Micro Hand S’ robot-assisted total mesorectal excision for rectal cancer: a retrospective study. BMC Gastroenterol 2021, 21. [Google Scholar] [CrossRef]
- Lei, Y.; Jiang, J.; Zhu, S.; Yi, B.; Li, J. Comparison of the short-term efficacy of two types of robotic total mesorectal excision for rectal cancer. Tech Coloproctol 2022, 26, 19–28. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Yi, B.; Zhu, S. Initial experience of Chinese surgical robot “Micro Hand S″-assisted versus open and laparoscopic total mesorectal excision for rectal cancer: Short-term outcomes in a single center. Asian J Surg 2022, 45, 299–306. [Google Scholar] [CrossRef]
- Kulis, T.; et al. Comparison of extraperitoneal laparoscopic and extraperitoneal Senhance radical prostatectomy. International Journal of Medical Robotics and Computer Assisted Surgery 2022, 18. [Google Scholar] [CrossRef]
- Ruvolo, C.C.; et al. A comparative analysis of the HUGOTM robot-assisted surgery system and the Da Vinci® Xi surgical system for robot-assisted sacrocolpopexy for pelvic organ prolapse treatment. International Journal of Medical Robotics and Computer Assisted Surgery 2024, 20. [Google Scholar] [CrossRef]
- Li, X.; et al. Robot-assisted Partial Nephrectomy with the Newly Developed KangDuo Surgical Robot Versus the da Vinci Si Surgical System: A Double-center Prospective Randomized Controlled Noninferiority Trial. Eur Urol Focus 2023, 9, 133–140. [Google Scholar] [CrossRef]
- Motoyama, D.; et al. Robot-assisted adrenalectomy using a hinotori surgical robot system: Report of first series of six cases. Asian J Endosc Surg 2023, 16, 489–495. [Google Scholar] [CrossRef]
- Motoyama, D.; et al. Robot-assisted radical nephrectomy using novel surgical robot platform, hinotori: Report of initial series of 13 cases. International Journal of Urology 2023, 30, 1175–1179. [Google Scholar] [CrossRef]
- Motoyama, D.; et al. Perioperative outcomes of robot-assisted partial nephrectomy using hinotori versus da Vinci surgical robot system: a propensity score-matched analysis. J Robot Surg 2023, 17, 2435–2440. [Google Scholar] [CrossRef]
- Clark, S.G.; Shepherd, J.P.; Sassani, J.C.; Bonidie, M. Surgical cost of robotic-assisted sacrocolpopexy: a comparison of two robotic platforms. Int Urogynecol J 2023, 34, 87–91. [Google Scholar] [CrossRef]
- Kim, J.S.; Choi, M.; Hwang, H.S.; Lee, W.J.; Kang, C.M. The Revo-i Robotic Surgical System in Advanced Pancreatic Surgery: A Second Non-Randomized Clinical Trial and Comparative Analysis to the da VinciTM System. Yonsei Med J 2024, 65, 148–155. [Google Scholar] [CrossRef]
- Bravi, C.A.; et al. Robot-assisted Radical Prostatectomy Performed with Different Robotic Platforms: First Comparative Evidence Between Da Vinci and HUGO Robot-assisted Surgery Robots. Eur Urol Focus 2024, 10, 107–114. [Google Scholar] [CrossRef]
- Balestrazzi, E.; et al. Comparative analysis of robot-assisted simple prostatectomy: the HUGOTM RAS system versus the DaVinci® Xi system. Prostate Cancer Prostatic Dis 2024, 27, 122–128. [Google Scholar] [CrossRef]
- Menendez, R.B.; et al. Da Vinci vs. Hugo RAS for robot-assisted radical prostatectomy: a prospective comparative single-center study. World J Urol 2024, 42. [Google Scholar] [CrossRef]
- Ou, H.C.; et al. Robot-Assisted Radical Prostatectomy by the Hugo Robotic-Assisted Surgery (RAS) System and the da Vinci System: A Comparison between the Two Platforms. Cancers (Basel) 2024, 16. [Google Scholar] [CrossRef]
- Prata, F.; et al. Trifecta Outcomes of Robot-Assisted Partial Nephrectomy Using the New HugoTM RAS System Versus Laparoscopic Partial Nephrectomy. J Clin Med 2024, 13. [Google Scholar] [CrossRef]
- Gandi, C.; et al. Perioperative Outcomes of Robotic Radical Prostatectomy with HugoTM RAS versus daVinci Surgical Platform: Propensity Score-Matched Comparative Analysis. J Clin Med 2024, 13. [Google Scholar] [CrossRef]
- Antonelli, A.; et al. Intraoperative Performance of DaVinci Versus Hugo RAS During Radical Prostatectomy: Focus on Timing, Malfunctioning, Complications, and User Satisfaction in 100 Consecutive Cases (the COMPAR-P Trial). Eur Urol Open Sci 2024, 63, 104–112. [Google Scholar] [CrossRef]
- Shen, C.; et al. Robot-assisted Radical Prostatectomy with the KangDuo Surgical System Versus the da Vinci Si System: A Prospective, Double-center, Randomized Controlled Trial. Eur Urol Focus 2024. [Google Scholar] [CrossRef]
- Sun, Z.; et al. Robot-assisted radical resection of colorectal cancer using the KangDuo surgical robot versus the da Vinci Xi robotic system: short-term outcomes of a multicentre randomised controlled noninferiority trial. Surg Endosc 2024, 38, 1867–1876. [Google Scholar] [CrossRef]
- Liu, Y.; et al. Comparison of short-term outcomes of robotic-assisted radical colon cancer surgery using the Kangduo Surgical Robotic System and the Da Vinci Si Robotic System: a prospective cohort study. Int J Surg 2024, 110, 1511–1518. [Google Scholar] [CrossRef]
- Halabi, M.; et al. Operative efficiency: a comparative analysis of Versius and da Vinci robotic systems in abdominal surgery. J Robot Surg 2024, 18. [Google Scholar] [CrossRef]
- Kohjimoto, Y.; Yamashita, S.; Iwagami, S.; Muraoka, S.; Wakamiya, T.; Hara, I. hinotoriTM vs. da Vinci®: propensity score-matched analysis of surgical outcomes of robot-assisted radical prostatectomy. J Robot Surg 2024, 18. [Google Scholar] [CrossRef]
- Lin, Y.C.; et al. Comparison of senhance and da vinci robotic radical prostatectomy: short-term outcomes, learning curve, and cost analysis. Prostate Cancer Prostatic Dis 2024, 27, 116–121. [Google Scholar] [CrossRef]
- Sighinolfi, M.C.; et al. New robotic systems: first head-to-head comparison between Hugo RAS and Versius CMR in the pre-clinical setting. Feb. 01, 2024, Edizioni Minerva Medica. [CrossRef]
- https://www.asensus.com/senhance. (Accessed in June 2024).
- http://revosurgical.com/render/view/revo_i/discover_revo_i.html. (Accessed in June 2024).
- https://www.medtronic.com/covidien/en-ca/robotic-assisted-surgery/hugo-ras-system.html. (Accessed in June 2024).
- https://avatera.eu/en/avatera-system. (Accessed in June 2024).
- https://www.distalmotion.com/Dexter. (Accessed in June 2024).
- https://ssinnovations.com/ssi-mantra/. (Accessed in June 2024).
Figure 1.
PRISMA flowchart.
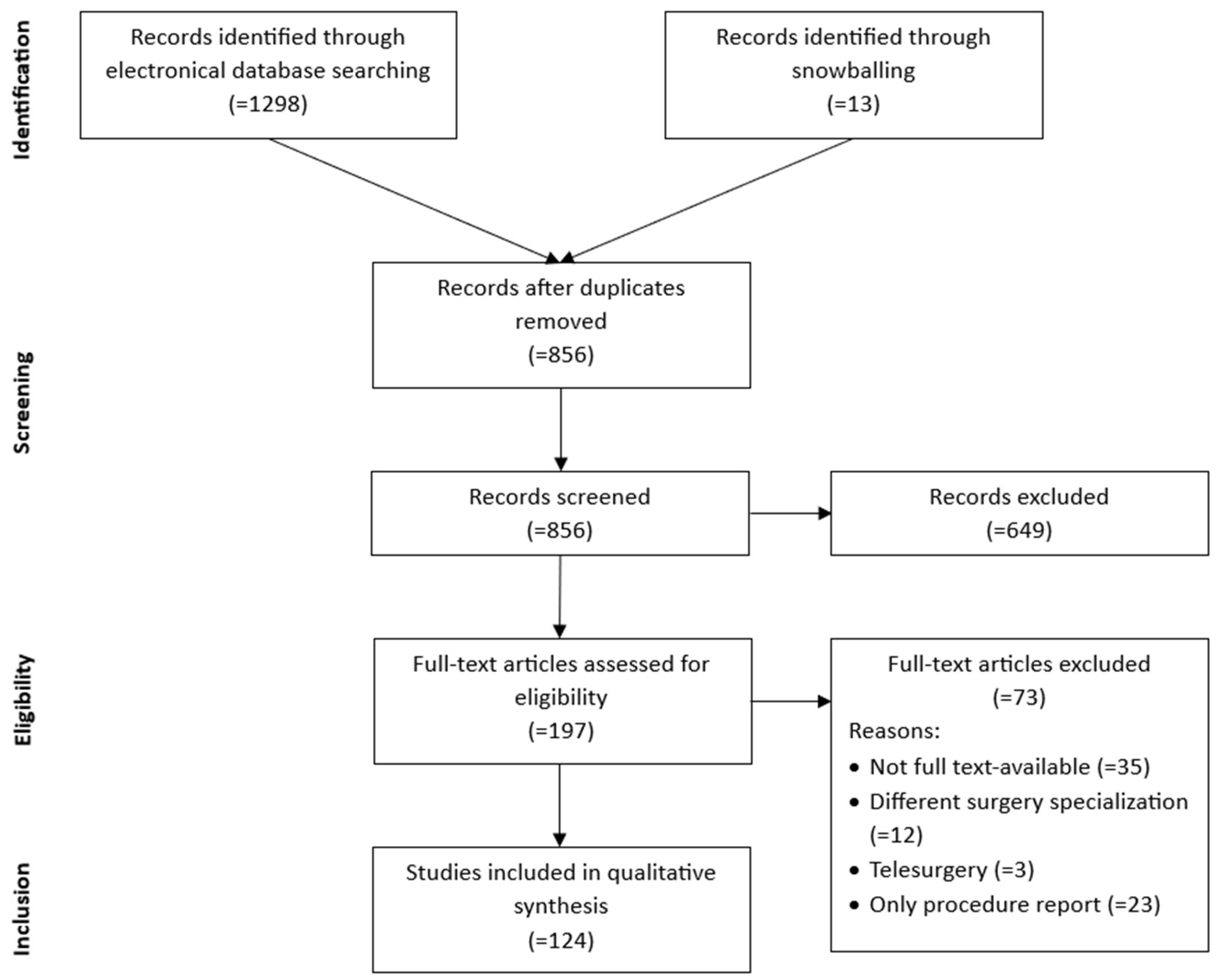
Figure 2.
Number of paper per country.

Figure 3.
Senhance® robotic platform.

Figure 4.
Revo-i® patient chart.

Figure 5.
HugoTM robotic platform.

Figure 6.
HinororiTM surgical system.
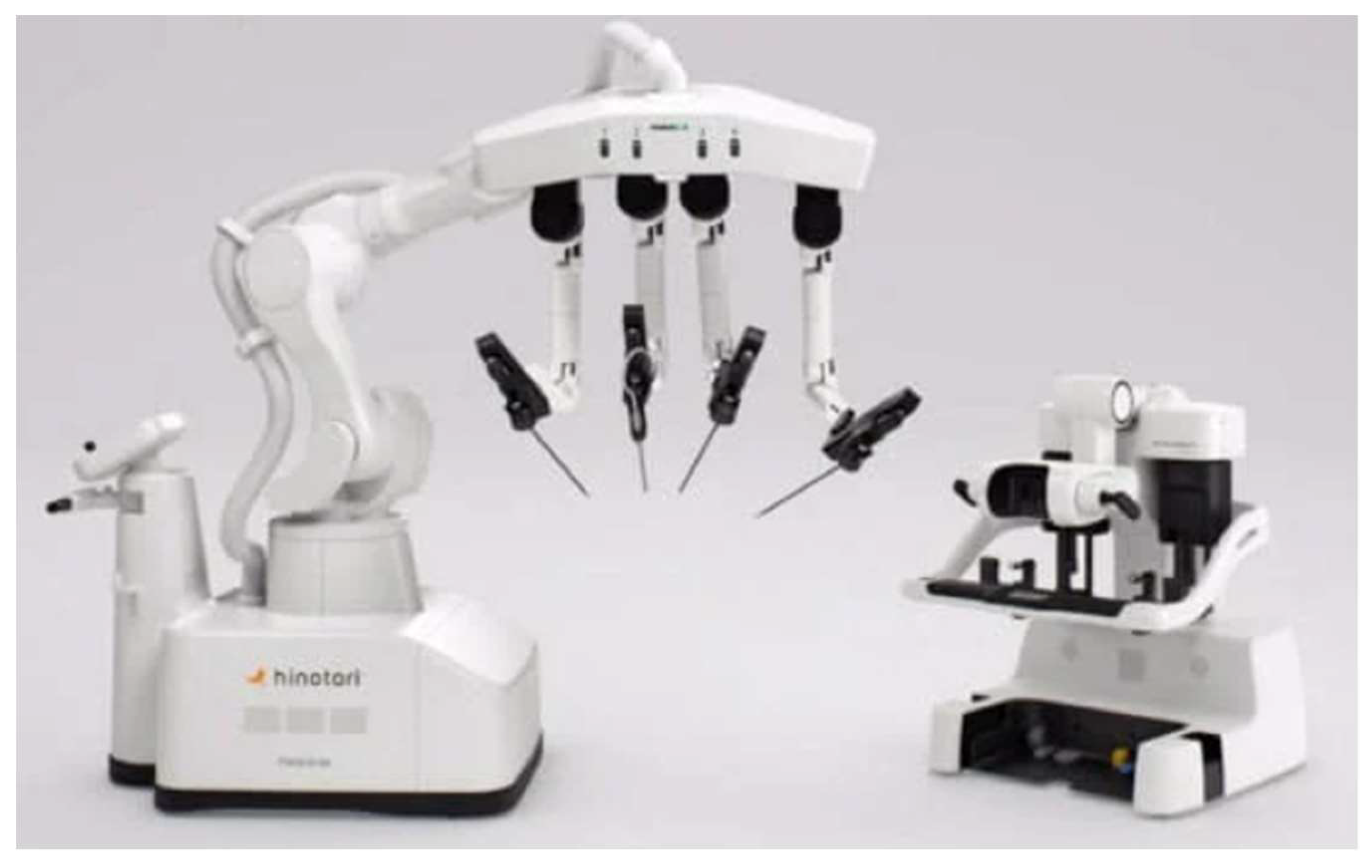
Figure 7.
KangDuo Surgical system.

Figure 8.
Versius® surgical robot.

Figure 9.
Mantra surgical robot.

Table 1.
The number of patients treated with a new surgical platform by specialty and surgical robot.
Table 1.
The number of patients treated with a new surgical platform by specialty and surgical robot.
| Robotic platform | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Surgical Specialty | HugoTM | Versius® | Senhance® | Revo-i® | Micro Hand S | Avatera | Dexter | HinotoriTM | Mantra | KangDuo | Toumai® | |
| General Surgery | 126 | 607 | 764 | 27 | 277 | - | 12 | 33 | 10 | 101 | - | |
| Gynaecology | 253 | 204 | 114 | - | - | - | 1 | 12 | - | - | - | |
| Urology | 962 | 86 | 1036 | 48 | - | 9 | 11 | 105 | - | 175 | 20 | |
Table 2.
Main information about the new surgical platforms.
| Surgical platform | Company | Year | Country | CE Mark | FDA approval | Approved in the origine nation |
|---|---|---|---|---|---|---|
| Senhance® | TransEnterix Surgical which became Asensus Surgical in 2021 | 2017 | USA | yes | yes | yes |
| Revo-i® | Meerecompany Inc. | 2017 | South Korea | no | no | yes |
| Micro Hand S | Shandon Wego Surgical Robot Co | 2017 | China | no | no | yes |
| Toumai® | Shanghai MicroPort MedBot (Group) | 2018 | China | no | no | yes |
| Avatera | Avatera Medical | 2019 | Germany | yes | NAI | yes |
| Versius® | CMR Surgical | 2019 | UK | yes | no | yes |
| HinotoriTM | Medicaroid Inc | 2020 | Japan | no | yes | yes |
| KangDuo | Suzhou KangDuo Robot Co., Ltd. | 2020 | China | NAI | no | yes |
| HugoTM | Medtronic | 2021 | USA | yes | yes | yes |
| Dexter | Distalmotion | 2022 | Switzerland | yes | no | yes |
| Mantra | SS Innovation | 2023 | India | ongoing | ongoing | yes |
NAI= Not Available Information.
Table 3.
Technical comparison of the surgical platforms.
| Surgical platform | Single port or#break#Multiport | Chart | Number of arms | Console | Vision | Fluorescence | Haptic Feedback | Eye tracking | Instruments |
|---|---|---|---|---|---|---|---|---|---|
| Senhance® | Multiport | multiple | 4 | Semi-open | 3DHD | NAI | yes | NAI | Wristed, 5 mm, disposable |
| Revo-i® | Multiport | single | 4 | Open | 3DHD | yes | yes | yes | rigid with a kit of wristed, unlimited uses, 5 mm |
| Micro Hand S | Multiport | single | 4 | Close | 3D HD | no | yes | no | wristed, multi-uses (20) |
| Toumai® | Multiport | single | 4 | Open | 3DHD | yes | no | no | wristed, reusable |
| Avatera | Multiport | single | 4 | open | 3D HD | no | no | yes | wristed, Reusable |
| Versius® | Multiport | multiple | 4 | open | 3D HD | yes | no | yes | wristed, disposable |
| HinotoriTM | Multiport | single | 4 | semi-open | 3D HD | NAI | no | no | wristed, reusable used up to 10 times |
| Kangduo | Multiport | single | 3 | Open | 3D HD | yes | yes | NAI | Wristed, Reusable up to 10 uses |
| HugoTM | Multiport | multiple | 4 | Open | 3D 4k | NAI | NAI | Yes | NAI |
| Dexter | Multiport | multiple | 3 | Open | 3DHD | yes | No | NAI | reusable up to 10 times |
| Mantra | Multiport | multiple | 5 | open | 3DHD | NA | NAI | NAI | NAI |
NAI= Not Available Information.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



