
Submitted:
03 October 2024
Posted:
04 October 2024
You are already at the latest version
Abstract
The widespread diffusion of electric vehicles poses new challenges in the field of fault diagnostics. Past studies have been focused mainly on machines designed for industrial applications, where the operating conditions and requirements are significantly different. This work presents a review of the most recent studies about fault diagnosis techniques in electrical machines feasible for traction applications, with a focus on the most adopted approaches of the last years and on the latest trends. Considerations about their applicability for electric vehicle purposes, along with some areas that require further research, are also provided.
Keywords:
Fault Detection
; Review
; Electric Vehicle
; Traction Application
; Condition Monitoring
; Machine Learning
; Permanent Magnet Machines
; Induction Machines
; Multi-Phase Machines
1. Introduction
1.1. Motivation
Rotating electrical machines are extensively used across various sectors in contemporary industry. Unforeseen failures can result in significant economic losses due to production halts and the necessity to replace defective components, or in some cases, the entire machine. Consequently, numerous studies have concentrated on the condition monitoring of electrical machines to identify early-stage faults across different configurations before they evolve into severe damages [1,2,3]. In recent years, the deployment of electric motors in traction applications has remarkably increased. However, research focused on fault diagnosis for these machines has not progressed to the same extent. This is primarily because electric vehicle applications entail different environment, sizes, and more complex machine control strategies compared to industrial applications. These factors influence both the condition monitoring and the ability to detect incipient faults effectively.
1.2. Objective
The aim of this study is to first present a comprehensive overview of the most researched and widely implemented fault diagnosis (FD) methodologies in recent years, with a particular emphasis on electrical machines and conditions that are more fitting for traction applications. Additionally, the viability of certain FD methods for traction applications are evaluated. Future challenges and machine topologies that require further investigation are also addressed. From this perspective, the principles under which specific approaches and machines are favored over others include the following:
- Automated faut diagnosis: the identification of incipient faults during regular machine operation is of significant importance, as it contributes to overall cost reduction, higher safety and reliability.
- Sensors fusion: combining data from multiple sensors provides more accurate, reliable, or comprehensive information than could be achieved by using any single sensor alone. It helps FD algorithms make safer and more informed decisions.
- Operating conditions: methodologies capable of working under non-stationary conditions should be preferred, although approaches which require steady-state conditions will also be evaluated.
- Machine topology: in industrial applications, induction machines (IMs) have been the most extensively studied [1,2,4,5,6]. Electric vehicles (EVs), on the other hand, can utilize a large variety of topologies, including IMs, permanent magnet synchronous motors (PMSMs), synchronous reluctance machines (SyRMs), and wound field synchronous machines (WFSMs). Typically, these machines feature three-phase windings and operate with radial flux. However, the interest towards the adoption of multiphase configurations as well as axial flux machines (AFMs) is gradually increasing.
2. Overview of the Key Physical Quantities in the Analysis
The condition monitoring of electrical machines is always performed through the measurement of some physical quantities, such as currents, voltages, fluxes, vibrations or temperatures. The underlying concept is that even an initial fault causes minor asymmetries and distinct behaviours from mechanical, thermal, or electromagnetic perspectives. These variations can be reflected in some of the previously mentioned key physical quantities, thereby allowing for identification. Excluding temperature, the other physical variables are also characterized by their nature as time-dependent signals, but can be seen also from a frequency domain point of view. Different manipulations in either time or frequency domains are valuable degrees of freedom to isolate specific fault characteristics. Typically, each fault generates distinct harmonics, which can be identified through appropriate transformations. In fact, these harmonics act as a signature, allowing a proper identification. Several factors influence the choice of the most appropriate quantities for FD, and these factors depend on the specific application. Below, some considerations regarding these quantities and their potential applicability to traction applications are outlined:
- Currents: Among the various parameters examined in extensive research, phase currents are particularly prominent, as current sensors are essential for safety and control purposes. Furthermore, their integration is relatively straightforward. Consequently, FD analysis utilizing Motor Current Signature Analysis (MCSA) remains a beneficial approach for traction applications, leveraging the existing current sensors employed for drive control [5,7,8,9]. However, a significant limitation of current-based FD arises in scenarios involving low loads or minor faults, where inherent measurement noise can hinder the accurate assessment of the machine’s condition.
- Voltages: Although voltage sensors are less frequently utilized in many industrial applications, they are essential in electric vehicles (EVs), where their presence is critical not only for proper drive control [10], but also for safety reasons. Their implementation is also straightforward, making them viable candidates for FD in EVs.
- Vibrations: Numerous investigations have been conducted on FD for industry application through vibration measurements, particularly for identifying bearing faults [9,11,12,13], which constitute the largest proportion of total failure in low-voltage (LV) machines and more than one tenth in high-voltage (HV) ones, where stator insulation failure become predominant, as illustrated in Figure 1 [7]. While promising results have been obtained, several limitations are present. Specifically, the need for additional sensors and the complexities associated with their installation present challenges for accurate assessments. Furthermore, the significant mechanical noise prevalent in EV environments introduces additional obstacles.
- Fluxes: Some research has explored the use of flux measurements as potential indicators of faults, similar to current analysis [9,11,14,15]. However, their application is limited due to the necessity for additional sensors. Most research make use of stray flux measurement [16,17], although the available data from previous studies is currently more limited compared to that of MCSA. Another option is represented by search coils. However, in EV applications, where the air gap is typically small, their incorporation may not be practical.
- Temperature: In terms of temperature-based methodologies, infrared thermography has been employed for FD purposes. This technique can map the thermal distribution across machine components, facilitating the identification of faults that induce excessive or uneven losses [18,19]. While this approach is still in its nascent stages and has predominantly been tested in industrial contexts, it holds potential as a viable alternative for future applications.
2.1. Signal Pre-Processing
As previously stated, the FD requires the analysis of one or more signals. Signals are often manipulated typically by applying one or more transformations, in addition to techniques such as noise reduction and various mathematical operations. Specifically, three primary possibilities exist [7,8,20]: time domain analysis, frequency domain analysis, or time-frequency domain analysis. A significant portion of the research on fault diagnosis in electrical machines predominantly relies on the latter two techniques, particularly when applied to MCSA. The most common example of a frequency-domain transformation is provided by the fast Fourier transform (FFT), which is known to be a valid tool for harmonic component isolation in stationary conditions. Another quite common method is provided instead by wavelet transforms such as discrete (DWT) or continuous wavelet transform (CWT) [21], which operate in the time-frequency domain. Figure 2 provides an overview of the most adopted transformation algorithms. Further insights into their meaning and potential applications can be found in [7]
3. Methods for Automatic Fault Detection
Once an appropriate FD algorithm is applied, prompt fault detection becomes essential. In automotive applications, the development of automated, real-time FD systems is crucial for both economic and safety reasons. It is important to note that FD approaches in the literature are not always clearly distinguished, as their categorization often depends on the researcher’s perspective. Some processes, such as signal pre-processing, may overlap. Below, a simple distinction between two main categories is presented.
3.1. Model Based Methods
Grasping the modeling of a specific electrical machine can help for a better understanding of its behavior under varying working conditions and can allow the prediction of unknown parameter values with a certain accuracy based on available measurements. State observers are utilized to monitor specific variables of the machine, which are then used to predict others, allowing for the assessment of whether the machine is operating in a healthy state or not. This is exemplified by various types of Kalman Filters (KF) [22,23,24,25], where the estimated parameters can be compared against defined thresholds to ascertain the healthy or faulty status of the machine. KFs can provide insights into the extent of failure when the model is finely calibrated, which also constitutes its primary limitation. Nonetheless, it retains traditional challenges associated with the tuning process, which may compromise its reliability. It has be underlined that the FD based on the comparison of some measured or estimated parameters against specific selected thresholds is quite a common practice and not related only to KFs. These approaches all share the need for varying degrees of system knowledge, depending on the required accuracy of the FD method.
3.2. Artificial Intelligence Based Methods
Fostered by the availability of an increasing computational capability, last years have seen a dramatic increment of interest in automated fault detection methods based on artificial intelligence (AI) [7,8,26,27]
Once the set of FD key physical quantities has been decided and the related sensors has been placed in the system, an appropriate signal preprocessing usually returns one or more variables that have specific features associated to the presence of an incipient fault.
However, external noises and operating conditions complicate the explicit identification, making it more suited for an experienced human than for a simple ’if-then’ algorithm. In automating the process, machine learning (ML) techniques can be highly effective, provided they are well trained.
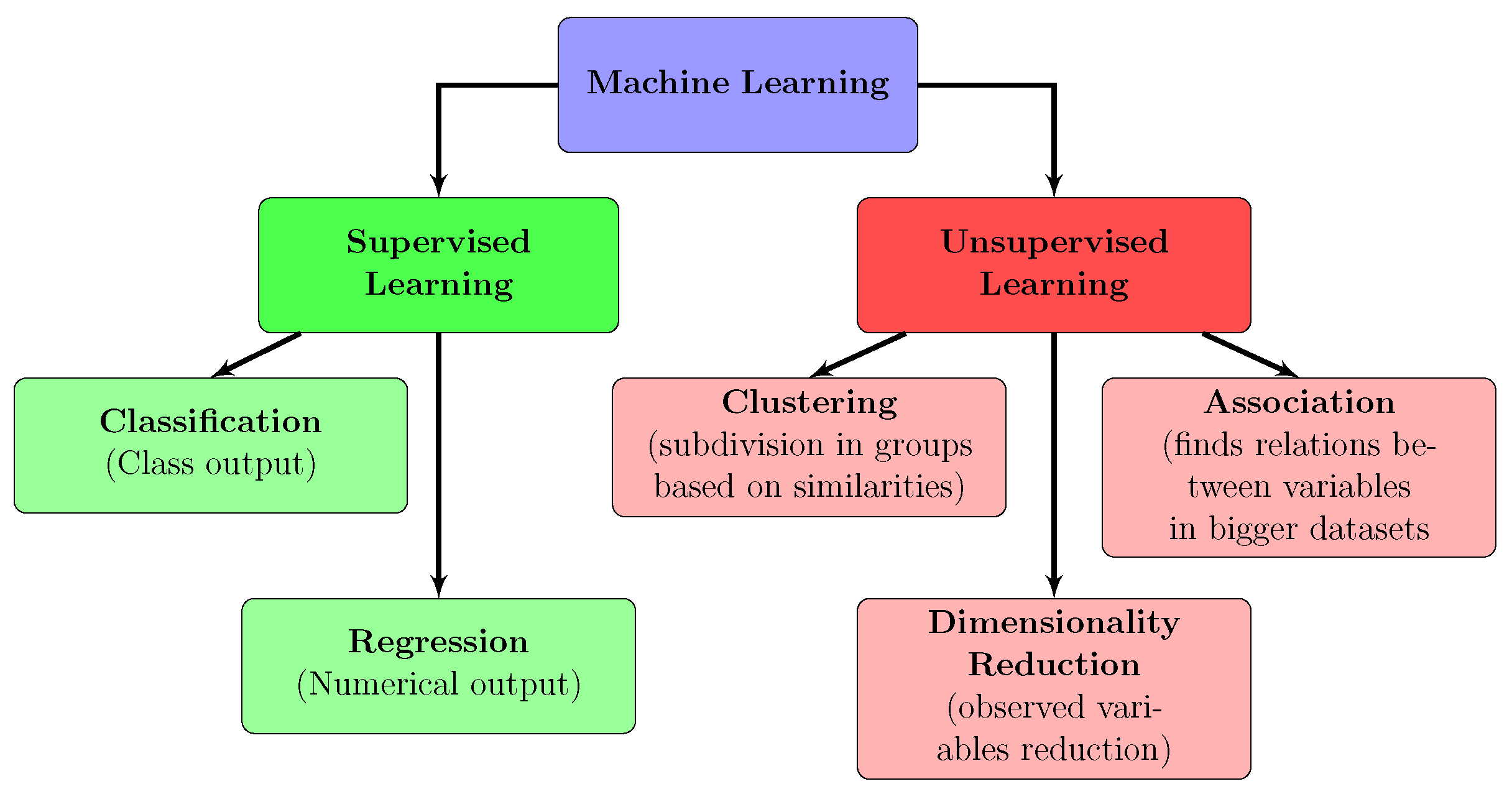
Based on the learning strategy, ML algorithms can generally be categorized into two main groups:
- Supervised Learning: they are by far the most adopted for electrical machine FD. Their main feature is the training based on labeled data. This means that the training dataset includes input-output pairs, where the input is the data which needs to be classified and output is the corresponding value or class. The goal of the algorithm is to learn a mapping from inputs to outputs so that it can predict the labels for new, unseen data accurately. For example, in a supervised learning task for fault classification based on current waveform measurement, the algorithm would be trained on a dataset of currents (inputs) with corresponding labels (outputs stating if the currents belongs to a healthy machine or not, or even the type of fault, if present). NNs have been widely adopted in supervised learning. Among them, deep neural networks (DNNs) have demonstrated greater potential in FD due to their enhanced flexibility and superior classification capability. Indeed, DNNs have the capacity to process both raw data and preprocessed data using various transforms [8,26]. Moreover, they exhibit great efficiency with larger datasets. NNs with a lower number of layers, called also shallow NNs (SNNs) can be also used for FD purposes. SNNs typically require extensive preprocessing of signals to emphasize features related to specific faults and are more suitable for smaller datasets [26]. Figure 3 resumes the FD methodologies utilizing neural networks. Other types of supervised learning methods which have been also utilized are support vector machines (SVM), k-Nearest-Neighbors (k-NN), linear regression (LR) and decision tree (DT) but there may be also other examples [28].
- Unsupervised Learning: it is a type of machine learning where the model is trained on data without labeled responses. The goal is to identify patterns and structures within the data. Common techniques include clustering (grouping similar data points) and dimensionality reduction (simplifying data while retaining important information). Unsupervised learning is generally less adopted for FD purposes, due to the complexity of the problem, especially if the aim is to identify incipient faults. However, some example of FD with unsupervised learning approaches are present, especially with autoencoders [29,30,31], which can be classified as dimensionality reduction unsupervised learning method.
The possible ML topologies have been collected in the block diagram of Figure 4
It has to be said that also hybrid approaches are possible for semi-supervised learning methods, while NNs adoption is not necessarily restricted only to supervised methods. Discussing and highlighting all the possible differences and peculiarities of ML approaches can become quite a complicated task and is not within the scope of this paper. Figure 4 is then intended to provide a brief summary of the main ML categories, each of them with its distinctive features. A useful guide for directing the search is provided by [32,33,34].
4. Induction Machines Faults
Induction machines (IMs) have long been, and continue to be, widely used in industrial environments, thereby attracting the majority of past research efforts. Although IMs can struggle in matching the torque and power density capabilities of PMSMs, their inherent robustness, lack of reliance on rare earth materials, and simple manufacturing procedures make them well-suited for a wide range of applications. However, it is important to note that not all insights from past research can be directly applied to EV contexts, as will be discussed later in the paper. In the following sections, a concise overview of the principal fault types affecting IMs will be presented, as well as the most adopted FD methodologies in the last years.
4.1. Broken Rotor Bar Fault
Faults in induction motors (IMs) can arise from the interplay of mechanical and thermal stresses. The presence of one or more broken rotor bars induces an asymmetry in the rotor flux, which subsequently impacts the stator currents. The primary additional harmonics generated by a broken rotor bar (BRB) are represented by (1):
where is the stator electrical fundamental frequency and s is the slip.
FD in IMs presents a considerable challenge due to the close proximity of the two main harmonics (for ) to the main harmonic, particularly at low slip conditions. This issue is therefore prevalent in both low-load situations for all IMs, but even during rated load operations for high-power IMs, which are characterized by smaller the slip values. Various fault detection techniques, including frequency transformations [35,36,37,38,39,40,41,42] and time-frequency transformations such as the Continuous Wavelet Transform (CWT) or the short time Fourier transform (STFT) [42,43,44,45], have been extensively explored.
MCSA is the most adopted quantity, while some studies rely on stray fluxes [40,45] or on air gap flux [42]. However, all these methodologies have primarily been validated in specific industrial contexts that differ significantly from typical EV environments [46,47].
Most existing studies focus on steady-state operations with grid-supplied sinusoidal currents or basic Volt-Hertz control strategies. While time-frequency transformations like the CWT demonstrate high accuracy in identifying BRBs during transient conditions, they require substantial transient slip variations, which is not feasible in Field-Oriented Control (FOC) operations. Unfortunately, there remains a scarcity of data available for non-stationary low-slip operations, highlighting this as an intriguing and open area for further investigation. In addition, as highlighted in [47], research about end ring failure are rare in literature.
4.2. Bearing Faults
Bearing faults are among the most prevalent mechanical failures encountered in rotating electrical machines. Early detection of these faults can be particularly challenging due to the presence of mechanical noise. In contrast to BRB faults, the harmonics induced by bearing faults are shifted significantly towards higher frequencies relative to the fundamental harmonic, as shown in equations (2) and (3). The following equation set specifically pertains to ball bearings faults and are independent of the electrical machine type.
where is the rotor mechanical frequency, is the stator electrical frequency and is the fault-specific mechanical frequency [7], which depends on the location of the bearing defect. Table 1 provides a brief summary on the most common possible defects.
Equation (2) is relative to the main fault harmonics at mechanical (hence physical) frequency, which can be detected, for example, by an accelerometer. Equation (3) is related instead to the electrical frequency, and can be observed through MCSA. Equations (4)-(7) allows instead the estimation of depending on the damage location.
where is the number of rolling elements (balls), is the bearing working angle ( for rolling bearing), and are the rolling element diameter and pitch diameter, respectively.

| Type of fault | |
| bearing cage | |
| outer race | |
| inner race | |
| rolling element |
Numerous studies have focused on IMs bearing FD (IMs). Recent research has increasingly employed machine learning (ML) techniques [12,13,16,48,49,50,51,52,53].
In works such as [12,13,51,52,53], fault diagnosis is conducted using vibration data, whereas [16,48,49,50] primarily utilizes electrical parameters, particularly MCSA. In all the above investigations, neural network training has been carried out on experimental data collected under steady-state conditions. Frequency and time-frequency manipulation have been intensively adopted as well. Frequency transformations have been used in [17,48,50,51,52], while time-frequency ones in [12,16,49]. In [13] raw signals from three different sensors are instead converted into a 2D image and then sent to a convolutional neural network (CNN), without performing any preliminary feature extraction.
4.3. Rotor Eccentricity
Eccentricity faults often arise from issues related to bearings, resulting in an uneven air gap and consequently leading to increased localized saturation. The additional harmonics generated by this fault are described by equations (8) and (9)
with ;
where is the pole pair number, is the rotor slot number, is the eccentricity order. denotes instead a static eccentricity.
In recent years, numerous studies have been conducted on faults related to eccentricity [54,55,56,57,58]. The research presented in [55] focuses on feature extraction based on vibration data, whereas [54,56,58] employs current measurements for the same purpose. In both instances, the analyses are conducted under steady-state conditions and an extensive use of frequency and time-frequency transformation is still present.
Possible online implementation is discussed in [58], which has also the peculiarity that time domain data are directly processed with TDA (topological data analysis) whose output should be used for ML training processes.
4.4. Stator Inter-Turn Short Circuit
The inter-turn short circuit (ITSC) fault is characteristic of all electrical machines and typically arises from a combination of thermal, electrical and mechanical stresses experienced by the winding [59]. The occurrence of this fault leads to a localized reduction in stator inductances, resulting in decreasing flux linkage and impedance. Consequently, this generates additional harmonics, whose frequencies are given by:
The presence of ITSC can trigger also an increase of some slot harmonics at the following frequencies:
where is the stator slot number and the number of pole pairs.
Various investigations into ITSC FD techniques present a range of methodologies [22,57,60,61,62,63,64]. A key distinction in this area is the incorporation of voltage component monitoring, either alongside or as an alternative to MCSA, in some studies.
In [57], voltage reference signature analysis is utilized alongside MCSA for a six-phase IM. The results indicate that both ITSC and eccentricity faults lead to alterations in harmonic planes. However, the detection of these harmonic components within the line current may prove challenging due to their low amplitude.
According to the sensor fusion strategy, the combination of both current and voltage analysis has been used also in [22], where the FD is performed through a KF.
Other research works have considered the effects of ITSC on IMs operating under Field-Oriented Control (FOC) [63] or Direct Torque Control (DTC) [65]. In [63], spectral analysis of control signal parameters reveals an increase in the second harmonic. The use of ML approaches is here less prominent with respect to other faults and have been adopted only in [62,64].
5. Permanent Magnet Synchronous Machine Faults
Permanent magnet synchronous motors (PMSMs) are the most commonly used electrical machines in EVs. Fault detection (FD) research in PMSMs is relatively new compared to that of induction machines (IMs). Despite its recent emergence, the findings in this field are highly valuable. Moreover, PMSMs’ reliance on dedicated voltage source inverters (VSIs) suggests that these results may be more directly applicable, especially for EV applications.
5.1. Demagnetization faults
Understanding the implications of demagnetization is crucial for maintaining the performance of PMSMs and other applications that rely on magnetic components. Monitoring temperature is essential to prevent irreversible losses in magnetization, which can significantly impact motor efficiency and operational reliability. This condition leads to a localized reduction in flux, which may also result in decreased saturation levels and changes in inductance values. The main harmonics generated by this fault are:
Research on FD related to demagnetization has investigated various methodologies based on MCSA, flux, voltage analysis, but also MVSA [7]. ML techniques [66,67,68], the use of multiple observers for monitoring inductances [69], and the analysis of voltage effects [70,71] have been studied.
An alternative approach based on CNNs is described in [72]. The innovation lies in the training dataset for the neural network, which no longer requires a large set of faulty motors. Instead, a substantial training dataset is generated using a combination of tuned motor models and data augmentation techniques. The result is a comprehensive and effective motor condition monitoring algorithm, centered around a CNN trained on a safe and cost-effective simulation-based dataset.
Findings indicate that ITSC faults and demagnetization affect the d-q voltages in distinct ways. For example, in [71] it has been shown that, as a consequence of demagnetization, an additional back-electromotive force 5th harmonic component could be observed in double three-phase superficial PMMs.
In [67], flux leakages are transformed into 2D images through SDP transform, which are then used as input for a semi-supervised classifier. This study employs a SNN, while it should be noted that CNNs also demonstrate promising performance when applied to 2D image data.
5.2. Rotor Mechanical Faults
Recent research on both eccentricity and bearing faults in PMSM is limited, although some interesting results have been found. The estimation of additional harmonics in case of bearing faults can be done again with (2), (3). On the other hand, eccentricity additional harmonics can be computed as:
The primary limitation in detecting eccentricity faults arises from the first harmonic (k = 1) coinciding with the frequency associated with demagnetization, complicating the differentiation between these two faults. The study presented in [73] uses a Linear Discriminant Analysis (LDA) to extract eccentricity fault features after MCSA performed through spectrum analysis. FD is then performed employing a Bayes classifier.
The voltage measurement at the midpoint of each winding phase for detecting static eccentricity is instead proposed in [74], showing that the voltage pattern in the plane may be affected as well.
Another study highlighted in [75] demonstrates the potential applications of CWT and DWT on vibrations for bearing FD, although the study is not recent.
Generative Adversarial Networks (GANs) are used in a more recent research [76], showing promising results in processing collected vibration measurements for bearing FD. A quite different approach is provided instead in [77]. Here time-frequency manipulation is used to generate 2D images for Multi-Scale Structural Similarity Index computation, which does not involve any type of ML.
5.3. Stator Inter-Turn Short Circuit
PMSMs exhibit the same winding structure of IMs. As a result, the occurrence of an ITSC generates the same additional harmonics. Recently, various methods for detecting ITSC in PMSMs have been investigated. For instance, [25] utilizes a KF for fault detection, while [78] monitors both voltage and current, employing a model-based statistical approach in combination with Least Squares Method (LSM) for FD. Although the implementation specifics are not elaborated upon in [10], this study is significant for its application of wavelet transform to the q-axis reference voltage.
Voltages are used also in [79,80], where it is demonstrated the potential of high frequency voltage injection, due to the different machine response in healthy and faulty conditions. Additionally, [81] performs transient MCSA using a variant of the short-time Fourier transform to extract the fault harmonic components (FHC).
Current analysis is adopted also in [82,83]. In the first case the high frequency current ripple is taken into consideration as fault indicator, while in the latter the FD is performed by comparison between a model-based current estimation and the measured one. On the other hand, a peculiar method is illustrated in [84], with the combination of thermography and magnetic flux sensors for the end winding region. Eventually, effects on the control due to this type of fault are discussed in [85].
6. Other Electrical Machines
The availability of electrical machines for tractions applications is not restricted to IMs and PMSMs. However, as shown in the following sections, research on FD for other machine topologies is quite limited. The main studies are presented below.
6.1. Synchronous Reluctance Machines
The pressing demand for energy-efficient and environmentally friendly electric drives across is driving research towards synchronous motors that utilize reduced or minimal amounts of rare-earth permanent magnets. Anisotropic or pure synchronous reluctance machines (SynRM), which fulfill this need, offer an interesting degree of freedom in torque control for EV applications, although their nonlinear magnetic model brings along an inherent control complexity [86]. SynRMs are robust and simple machines and, due to their structure, they cannot experience BRB or demagnetization issues. Their main drawback is provided by a low power factor and poor flux weakening capabilities, restricting their adoption to lower power ratings with respect to the permanent magnet counterpart. Studies about FD for these machines are mainly restricted to ITSC [87,88,89]. Online implementation is discussed only in [88]. Here both voltages and currents are employed in the FD procedure and the main indicator is provided by the zero sequence voltage component, which should be close to zero in healthy conditions. Given the interest of EV manufacturers in this machine topology, it is believed that FD research will soon be accelerated.
6.2. Wound Field Synchronous Machines
Similar to SynRMs, research on alternatives to rare earth-based PMSMs has seen a surge of interest in wound field synchronous machines (WFSMs) in recent years. However, significant studies on FD for EV applications are still lacking. The main reason is that, for decades, WFSMs have primarily been used as generators due to their flexible flux regulation and ability to provide sinusoidal back electromotive force (BEMF) with low total harmonic distortion (THD). Their use in traction applications is relatively recent. Consequently, research on WFSM FD for generation applications is substantial, with few exceptions for other industrial applications, and has mainly focused on the excitation system. Some example are provided in [15,90,91,92,93,94,95].
6.3. Axial Flux Machines
Axial flux machines (AFMs) has always been important candidates in the traction field, thanks to their high torque density and limited volume, making them suitable also for direct drive applications. However, their manufacturing complexity has always limited their production, as well as the relative studies, including those related to FD.
The available research is mainly focused on demagnetization [96,97,98] and eccentricity [99,100]. Among them, [97,98] are based on generators. The key physical quantities are fluxes in [96,99], evaluated through search coils, while vibrations in conjuction with frequency and time frequency manipulation in [100].
Instead, currents have been used in [97] and the feature extraction has been performed with local binary pattern (LBP). FD has been performed instead with a k-NN algorithm. Both currents and voltages have been used in [98] to evaluate both the power spectrum and reconstruct the flux linkage to evaluate the machine status in a model based approach.
6.4. Multiphase Machines
Multiphase variable-speed drives (those with more than three phases) have emerged as a mainstream research area over the past decade. The primary driving forces behind this interest are specific applications related to the green agenda, including electric and hybrid electric vehicles, locomotive traction, ship propulsion, and ’more-electric’ aircraft. Innovative uses of the additional degrees of freedom in multiphase machines for various non-traditional purposes are explored [101].
Multiphase machines provide a higher torque density, lower torque ripple, a better fault tolerance capability as well as the possibility to reduce the switching devices current rating when the same output power of the three-phase counterpart is fixed.
The majority of FD studies related to multiphase machines focus on open phase and open circuit fault detection, as well as fault-tolerant control under these conditions [102,103,104,105,106,107,108,109,110,111,112,113]. The primary reason for this focus is their ability to operate even when one or more phases are out of service, provided that at least three healthy phases can be controlled. In most of these studies, the importance of rapid FD is emphasized, allowing the control algorithm to adapt in real time for safer and more efficient operation. Nevertheless, the main goal remains fault-tolerant control, as detecting these fault conditions does not require the detailed modeling or tuning needed for incipient faults of other types.
There is, however, a limited fraction of studies focused on other types of faults which show also a peculiarity of these machines [57,71,113,114]. In fact, the control algorithms for multiphase machines employ specific transformations, such as space vector decomposition, which enable the observation and control of current harmonics in distinct orthogonal subspaces. These harmonics can be effectively used as additional variables to assess the operating status.
In [57] the second harmonic is used as a fault indicator to discriminate between eccentricity and ITSC in a symmetrical six-phase configuration.
In [71,114] 5th harmonic plane observation is instead adopted to detect respectively a demagnetization and an ITSC in asymmetrical double three-phase machines. Harmonic subspaces are also used in [113] both to detect open-phase conditions, but also for sensors FD. Therefore, while the previously presented FD methodologies for three-phase windings remain viable, additional methodologies can also be employed, demonstrating significant potential for future research and applications.
7. Conclusions
Most previous research on fault diagnostics has predominantly focused on three-phase IMs and PMSMs, primarily used in industrial environments. As a result, the insights gained from these studies may only be partially applicable to traction applications. A significant portion of the research has centered on machines operating under different environmental conditions and utilizing more basic control strategies. Significantly, research findings concerning SynRM, WFSMs, and AFMs are limited due to their lower prevalence and relatively recent access into the market, particularly as traction motors.
Regarding the potential integration of multiphase machines, existing FD methodologies can be adapted accordingly. Additionally, the capability to monitor specific harmonic subspaces allows for assessing how various faults affect current harmonic control, providing additional FD indicators. Although research data in this field are limited, they highlight a pressing need for further studies in the coming years.
Among the various parameters monitored for FD, complementary use of MCSA and voltage analysis is preferable. This preference arises from the availability of sensors typically used for EV drives, eliminating the need for additional instrumentation. This approach is supported by the fact that most vibration-based FD techniques perform optimally under stationary conditions, while automotive applications often experience frequent load variations, oscillations, and elevated noise levels, complicating detection efforts. Therefore, further investigation into this area is essential.
Regarding the most adopted approaches for automatic FD, the model based approach continues to be part of the recent studies, while ML methods have gained significant interest, especially with various types of supervised learning. Among these, DNNs appears to be promising candidates for processing the large amount of data expected to become available in the coming years.
Acknowledgments
This study was carried out within the MOST – Sustainable Mobility Center and received funding from the European Union Next-GenerationEU (PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR) – MISSIONE 4 COMPONENTE 2, INVESTIMENTO 1.4 – D.D. 1033 17/06/2022, CN00000023). This manuscript reflects only the authors’ views and opinions, neither the European Union nor the European Commission can be considered responsible for them.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AFM | Axial Flux Machines |
| BEMF | Back Electromotive Force |
| BRB | Broken Rotor Bar |
| CNN | Convolutional Neural Network |
| DNN | Deep Neural Network |
| CWT | Continuous Wavelet Transform |
| DTC | Direct Torque Control |
| DWT | Discrete Wavelet Transform |
| EV | Electric Vehicle |
| FOC | Field oriented Control |
| FHC | Fault Harmonic Component |
| GAN | Generative Adversarial Network |
| IM | Induction Machine |
| ITSC | Interturn Short Circuit |
| KF | Kalman Filter |
| KLD | Kullback-Leibler Divergence |
| k-NN | k-Nearest Neighbor (algorithm) |
| LBP | Linear Binary Pattern |
| LSM | Least Square Method |
| MCSA | Motor Current Signature Analysis |
| ML | Machine Learning |
| MVSA | Motor Vibration Signature Analysis |
| PMSM | Permanent Magnet Synchoronous Machine |
| SNN | Shallow Neural Network |
| SynRMs | Synchronous Reluctance Machine |
| THD | Total harmonic distortion |
| WFSM | Wound Field Synchronous Machine |
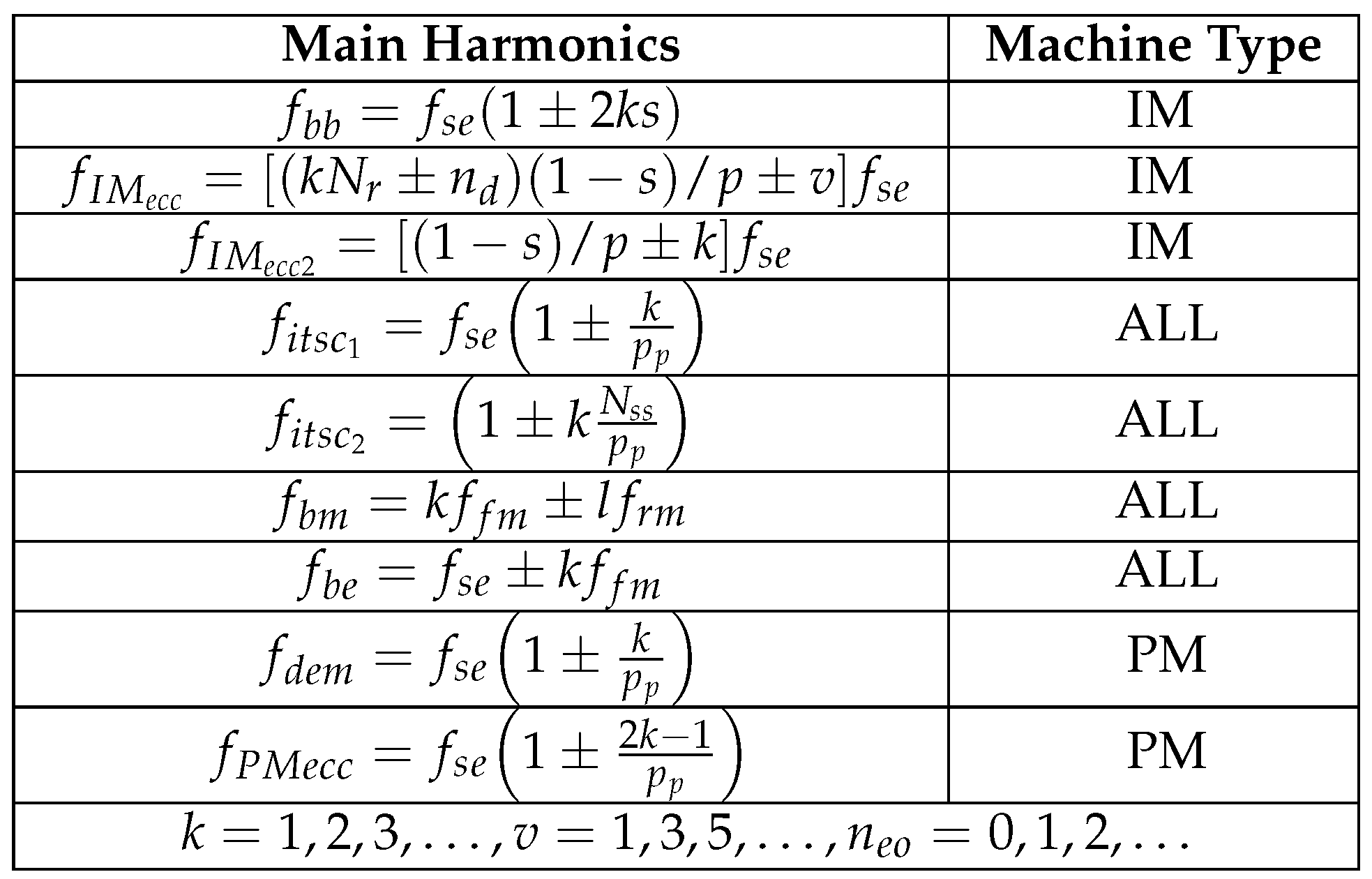
8.
Table 2.
Summary of Main Harmonics for Different Fault and Machine
References
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in Fault Diagnosis for Electrical Machines: A Review of Diagnostic Techniques. IEEE Industrial Electronics Magazine 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.A. Advances in Electrical Machine, Power Electronic, and Drive Condition Monitoring and Fault Detection: State of the Art. IEEE Transactions on Industrial Electronics 2015, 62, 1746–1759. [Google Scholar] [CrossRef]
- Pastura, M.; Zigliotto, M. Overview and Challenges of Fault Detection Methods in Electrical Motors for EV Applications. 26th Conference on Electrical Machines (ICEM 2024), 2024.
- Nandi, S.; Toliyat, H.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Transactions on Energy Conversion 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Bhole, N.; Ghodke, S. Motor Current Signature Analysis for Fault Detection of Induction Machine–A Review. 2021 4th Biennial International Conference on Nascent Technologies in Engineering (ICNTE), 2021, pp. 1–6. [CrossRef]
- Bessous, N. Reliability Surveys of Fault Distributions in Rotating Electrical Machines : – Case Study of Fault Detections in IMs –. 2020 1st International Conference on Communications, Control Systems and Signal Processing (CCSSP), 2020, pp. 535–543. [CrossRef]
- Orlowska-Kowalska, T.; Wolkiewicz, M.; Pietrzak, P.; Skowron, M.; Ewert, P.; Tarchala, G.; Krzysztofiak, M.; Kowalski, C.T. Fault Diagnosis and Fault-Tolerant Control of PMSM Drives–State of the Art and Future Challenges. IEEE Access 2022, 10, 59979–60024. [Google Scholar] [CrossRef]
- Niu, G.; Dong, X.; Chen, Y. Motor Fault Diagnostics Based on Current Signatures: A Review. IEEE Transactions on Instrumentation and Measurement 2023, 72, 1–19. [Google Scholar] [CrossRef]
- Ramana, D.V.; Baskar, S. Diverse fault detection techniques of three-phase induction motor — A review. 2016 International Conference on Emerging Technological Trends (ICETT), 2016, pp. 1–8. [CrossRef]
- Haje Obeid, N.; Battiston, A.; Boileau, T.; Nahid-Mobarakeh, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Transactions on Transportation Electrification 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Cheng, M.; Hang, J.; Zhang, J. Overview of fault diagnosis theory and method for permanent magnet machine. Chinese Journal of Electrical Engineering 2015, 1, 21–36. [Google Scholar] [CrossRef]
- Abid, F.B.; Sallem, M.; Braham, A. Optimized SWPT and Decision Tree for Incipient Bearing Fault Diagnosis. 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), 2019, pp. 231–236. [CrossRef]
- Wang, J.; Wang, D.; Wang, S.; Li, W.; Song, K. Fault Diagnosis of Bearings Based on Multi-Sensor Information Fusion and 2D Convolutional Neural Network. IEEE Access 2021, 9, 23717–23725. [Google Scholar] [CrossRef]
- Mirzaeva, G.; Saad, K.I.; Jahromi, M.G. Comprehensive Diagnostics of Induction Motor Faults Based on Measurement of Space and Time Dependencies of Air Gap Flux. IEEE Transactions on Industry Applications 2017, 53, 2657–2666. [Google Scholar] [CrossRef]
- Martínez, M.E.I.; Carmenate, J.G.; Antonino-Daviu, J.; Dunai, L.; Platero, C.A.; Conejero, J.A.; de Córdoba, P.F. Automatic Classification of Field Winding Faults in Synchronous Motors Based on Bicoherence Image Segmentation and Higher Order Statistics of Stray Flux Signals. IEEE Transactions on Industry Applications 2023, 59, 3945–3954. [Google Scholar] [CrossRef]
- Minervini, M.; Mognaschi, M.E.; Di Barba, P.; Frosini, L. Convolutional Neural Networks for Automated Rolling Bearing Diagnostics in Induction Motors Based on Electromagnetic Signals. Applied Sciences 2021, 11. [Google Scholar] [CrossRef]
- Frosini, L.; Minervini, M.; Ciceri, L.; Albini, A. Multiple faults detection in low voltage inverter-fed induction motors. 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), 2019, pp. 323–329. [CrossRef]
- Alfredo Osornio-Rios, R.; Antonino-Daviu, J.A.; de Jesus Romero-Troncoso, R. Recent Industrial Applications of Infrared Thermography: A Review. IEEE Transactions on Industrial Informatics 2019, 15, 615–625. [Google Scholar] [CrossRef]
- Ramirez-Nunez, J.A.; Morales-Hernandez, L.A.; Osornio-Rios, R.A.; Antonino-Daviu, J.A.; Romero-Troncoso, R.J. Self-adjustment methodology of a thermal camera for detecting faults in industrial machinery. IECON 2016 - 42nd Annual Conference of the IEEE Industrial Electronics Society, 2016, pp. 7119–7124. [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Bin Lee, S.; Kang, T.j.; Yang, C. Advanced Induction Motor Rotor Fault Diagnosis Via Continuous and Discrete Time–Frequency Tools. IEEE Transactions on Industrial Electronics 2015, 62, 1791–1802. [Google Scholar] [CrossRef]
- Sadowsky, J.S. The continuous wavelet transform: a tool for signal investigation and understanding. 1994.
- A robust stator inter-turn fault detection in induction motor utilizing Kalman filter-based algorithm. Measurement 2022, 187, 110181. [CrossRef]
- Zarei, J.; Kowsari, E.; Razavi-Far, R. Induction Motors Fault Detection Using Square-Root Transformed Cubature Quadrature Kalman Filter. IEEE Transactions on Energy Conversion 2019, 34, 870–877. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Romeral, L. Diagnosis of Interturn Faults in PMSMs Operating Under Nonstationary Conditions by Applying Order Tracking Filtering. IEEE Transactions on Power Electronics 2013, 28, 507–515. [Google Scholar] [CrossRef]
- El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies 2020, 13. [Google Scholar] [CrossRef]
- Lang, W.; Hu, Y.; Gong, C.; Zhang, X.; Xu, H.; Deng, J. Artificial Intelligence-Based Technique for Fault Detection and Diagnosis of EV Motors: A Review. IEEE Transactions on Transportation Electrification 2022, 8, 384–406. [Google Scholar] [CrossRef]
- Karnavas, Y.L.; Chasiotis, I.D.; Drakaki, M.; Tziafettas, I.A. Recent Advances of Neural Network based Methods in Induction Motor Fault Diagnosis. 2020 International Conference on Electrical Machines (ICEM), 2020, Vol. 1, pp. 1411–1417. [CrossRef]
- F.Y, O.; J.E.T, A.; O., A.; O, H.J.; O, O.; J, A. Supervised Machine Learning Algorithms: Classification and Comparison. International Journal of Computer Trends and Technology 2017, 48, 128–138. [CrossRef]
- Amarbayasgalan, T.; Ryu, K.H. Unsupervised Feature-Construction-Based Motor Fault Diagnosis. Sensors 2024, 24. [Google Scholar] [CrossRef]
- Principi, E.; Rossetti, D.; Squartini, S.; Piazza, F. Unsupervised electric motor fault detection by using deep autoencoders. IEEE/CAA Journal of Automatica Sinica 2019, 6, 441–451. [Google Scholar] [CrossRef]
- Abdellatif, S.; Aissa, C.; Hamou, A.A.; Chawki, S.; Oussama, B.S. A Deep Learning Based on Sparse Auto-Encoder with MCSA for Broken Rotor Bar Fault Detection and Diagnosis. 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), 2018, pp. 1–6. [CrossRef]
- Shanthamallu, U.; Spanias, A. Machine and Deep Learning Algorithms and Applications; Synthesis Lectures on Signal Processing, Springer International Publishing, 2022.
- López, C. MACHINE LEARNING WITH MATLAB. SUPERVISED LEARNING AND CLASSIFICATION; SCIENTIFIC BOOKS.
- LOPEZ, C. MACHINE LEARNING WITH MATLAB. UNSUPERVISED LEARNING TECHNIQUES: CLASSIFICATION; Lulu.com, 2020.
- Culbert, I.; Rhodes, W. Using current signature analysis technology to reliably detect cage winding defects in squirrel cage induction motors. Record of Conference Papers Industry Applications Society 52nd Annual Petroleum and Chemical Industry Conference, 2005, pp. 95–101. [CrossRef]
- Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Burriel-Valencia, J. Diagnosis of Rotor Asymmetries Faults in Induction Machines Using the Rectified Stator Current. IEEE Transactions on Energy Conversion 2020, 35, 213–221. [Google Scholar] [CrossRef]
- Xu, B.; Sun, L.; Xu, L.; Xu, G. Improvement of the Hilbert Method via ESPRIT for Detecting Rotor Fault in Induction Motors at Low Slip. IEEE Transactions on Energy Conversion 2013, 28, 225–233. [Google Scholar] [CrossRef]
- Zhang, P.; Du, Y.; Habetler, T.G.; Lu, B. A Survey of Condition Monitoring and Protection Methods for Medium-Voltage Induction Motors. IEEE Transactions on Industry Applications 2011, 47, 34–46. [Google Scholar] [CrossRef]
- Lopez-Ramirez, M.; Rodriguez-Donate, C.; Ledesma-Carrillo, L.M.; Villalobos-Pina, F.J.; Munoz-Minjares, J.U.; Cabal-Yepez, E. Walsh–Hadamard Domain-Based Intelligent Online Fault Diagnosis of Broken Rotor Bars in Induction Motors. IEEE Transactions on Instrumentation and Measurement 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Shin, J.; Park, Y.; Lee, S.B. Flux-Based Detection and Classification of Induction Motor Eccentricity, Rotor Cage, and Load Defects. IEEE Transactions on Industry Applications 2021, 57, 2471–2480. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Burriel-Valencia, J.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. New Method for Spectral Leakage Reduction in the FFT of Stator Currents: Application to the Diagnosis of Bar Breakages in Cage Motors Working at Very Low Slip. IEEE Transactions on Instrumentation and Measurement 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Dias, C.G.; Silva, L.C.d. Induction Motor Speed Estimation Based on Airgap Flux Measurement Using Hilbert Transform and Fast Fourier Transform. IEEE Sensors Journal 2022, 22, 12690–12699. [Google Scholar] [CrossRef]
- Pasqualotto, D.; Zigliotto, M. Increasing Feasibility of Neural Network-Based Early Fault Detection in Induction Motor Drives. IEEE Journal of Emerging and Selected Topics in Power Electronics 2022, 10, 2042–2051. [Google Scholar] [CrossRef]
- Sabir, H.; Ouassaid, M.; Ngote, N. An experimental method for diagnostic of incipient broken rotor bar fault in induction machines. Heliyon 2022, 8, e09136. [Google Scholar] [CrossRef]
- Panagiotou, P.A.; Arvanitakis, I.; Lophitis, N.; Antonino-Daviu, J.A.; Gyftakis, K.N. A New Approach for Broken Rotor Bar Detection in Induction Motors Using Frequency Extraction in Stray Flux Signals. IEEE Transactions on Industry Applications 2019, 55, 3501–3511. [Google Scholar] [CrossRef]
- Halder, S.; Bhat, S.; Zychma, D.; Sowa, P. Broken Rotor Bar Fault Diagnosis Techniques Based on Motor Current Signature Analysis for Induction Motor—A Review. Energies 2022, 15. [Google Scholar] [CrossRef]
- Atta, M.E.E.D.; Ibrahim, D.K.; Gilany, M.I. Broken Bar Fault Detection and Diagnosis Techniques for Induction Motors and Drives: State of the Art. IEEE Access 2022, 10, 88504–88526. [Google Scholar] [CrossRef]
- Sun, M.; Wang, H.; Liu, P.; Long, Z.; Yang, J.; Huang, S. A Novel Data-Driven Mechanical Fault Diagnosis Method for Induction Motors Using Stator Current Signals. IEEE Transactions on Transportation Electrification 2023, 9, 347–358. [Google Scholar] [CrossRef]
- Aviña-Corral, V.; de Jesus Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Ramirez-Cortes, J.M. Bearing Fault Detection in ASD-Powered Induction Machine Using MODWT and Image Edge Detection. IEEE Access 2022, 10, 24181–24193. [Google Scholar] [CrossRef]
- Yatsugi, K.; Pandarakone, S.E.; Mizuno, Y.; Nakamura, H. Common Diagnosis Approach to Three-Class Induction Motor Faults Using Stator Current Feature and Support Vector Machine. IEEE Access 2023, 11, 24945–24952. [Google Scholar] [CrossRef]
- Brusamarello, B.; Cardozo da Silva, J.C.; de Morais Sousa, K.; Guarneri, G.A. Bearing Fault Detection in Three-Phase Induction Motors Using Support Vector Machine and Fiber Bragg Grating. IEEE Sensors Journal 2023, 23, 4413–4421. [Google Scholar] [CrossRef]
- Biswas, A.; Ray, S.; Dey, D.; Munshi, S. Detection of Simultaneous Bearing Faults Fusing Cross Correlation With Multikernel SVM. IEEE Sensors Journal 2023, 23, 14418–14427. [Google Scholar] [CrossRef]
- Brusamarello, B.; Cardozo da Silva, J.C.; de Morais Sousa, K.; Guarneri, G.A. Bearing Fault Detection in Three-Phase Induction Motors Using Support Vector Machine and Fiber Bragg Grating. IEEE Sensors Journal 2023, 23, 4413–4421. [Google Scholar] [CrossRef]
- DEHINA, W.; BOUMEHRAZ, M.; KRATZ, F.; FANTINI, J. Diagnosis and Comparison between Stator Current Analysis and Vibration Analysis of Static Eccentricity Faults in The Induction Motor. 2019 4th International Conference on Power Electronics and their Applications (ICPEA), 2019, pp. 1–4. [CrossRef]
- Alimardani, R.; Rahideh, A.; Hedayati Kia, S. Mixed Eccentricity Fault Detection for Induction Motors Based on Time Synchronous Averaging of Vibration Signals. IEEE Transactions on Industrial Electronics 2024, 71, 3173–3181. [Google Scholar] [CrossRef]
- Agah, G.R.; Rahideh, A.; Khodadadzadeh, H.; Khoshnazar, S.M.; Hedayatikia, S. Broken Rotor Bar and Rotor Eccentricity Fault Detection in Induction Motors Using a Combination of Discrete Wavelet Transform and Teager–Kaiser Energy Operator. IEEE Transactions on Energy Conversion 2022, 37, 2199–2206. [Google Scholar] [CrossRef]
- Yepes, A.G.; Fonseca, D.S.B.; Antunes, H.R.P.; López, O.; Marques Cardoso, A.J.; Doval-Gandoy, J. Discrimination Between Eccentricity and Interturn Faults Using Current or Voltage-Reference Signature Analysis in Symmetrical Six-Phase Induction Machines. IEEE Transactions on Power Electronics 2023, 38, 2421–2434. [Google Scholar] [CrossRef]
- Wang, B.; Lin, C.; Inoue, H.; Kanemaru, M. Induction Motor Eccentricity Fault Detection and Quantification Using Topological Data Analysis. IEEE Access 2024, 12, 37891–37902. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; Wiley, 2013.
- Elbouchikhi, E.; Amirat, Y.; Feld, G.; Benbouzid, M. Generalized Likelihood Ratio Test Based Approach for Stator-Fault Detection in a PWM Inverter-Fed Induction Motor Drive. IEEE Transactions on Industrial Electronics 2019, 66, 6343–6353. [Google Scholar] [CrossRef]
- Verma, A.K.; Radhika, S.; Padmanabhan, S.V. Wavelet Based Fault Detection and Diagnosis Using Online MCSA of Stator Winding Faults Due to Insulation Failure in Industrial Induction Machine. 2018 IEEE Recent Advances in Intelligent Computational Systems (RAICS), 2018, pp. 204–208. [CrossRef]
- Yagami, Y.; Araki, C.; Mizuno, Y.; Nakamura, H. Turn-to-turn insulation failure diagnosis of stator winding of low voltage induction motor with the aid of support vector machine. IEEE Transactions on Dielectrics and Electrical Insulation 2015, 22, 3099–3106. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Tarchała, G.; Orłowska-Kowalska, T.; Kowalski, C.T. Online Stator Interturn Short Circuits Monitoring in the DFOC Induction-Motor Drive. IEEE Transactions on Industrial Electronics 2016, 63, 2517–2528. [Google Scholar] [CrossRef]
- Rengifo, J.; Moreira, J.; Vaca-Urbano, F.; Alvarez-Alvarado, M.S. Detection of Inter-Turn Short Circuits in Induction Motors Using the Current Space Vector and Machine Learning Classifiers. Energies 2024, 17. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohammed, O.A.; Restrepo, J. Analysis of the Impact of Stator Interturn Short-Circuit Faults on Induction Machines Driven by Direct Torque Control. IEEE Transactions on Energy Conversion 2018, 33, 1463–1474. [Google Scholar] [CrossRef]
- Haddad, R.Z.; Strangas, E.G. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines Using MCSA/MVSA and LDA. IEEE Transactions on Energy Conversion 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, X.; Qin, G.; Xie, J.; Peng, J.; Huang, S.; Long, Z.; Tang, Y. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Using Magnetic Leakage Signals. IEEE Transactions on Industrial Informatics 2023, 19, 6105–6116. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Demagnetization Fault Diagnosis of Permanent Magnet Synchronous Motors Based on Stator Current Signal Processing and Machine Learning Algorithms. Sensors 2023, 23. [Google Scholar] [CrossRef]
- Gao, J.; Gui, W.; Yang, C.; Peng, T.; Luo, J.; Han, Y. Multiple Observers-Based Demagnetization Fault Detection With Inductance Mismatch Impacts Eliminated for PMSMs. IEEE Transactions on Power Electronics 2023, 38, 8016–8021. [Google Scholar] [CrossRef]
- Ullah, Z.; Lee, S.T.; Hur, J. A Novel Fault Diagnosis Technique for IPMSM Using Voltage Angle. 2018 IEEE Energy Conversion Congress and Exposition (ECCE), 2018, pp. 3236–3243. [CrossRef]
- Vancini, L.; Mengoni, M.; Rizzoli, G.; Zarri, L.; Tani, A. Local Demagnetization Detection in Six-Phase Permanent Magnet Synchronous Machines. IEEE Transactions on Industrial Electronics 2024, 71, 5508–5518. [Google Scholar] [CrossRef]
- Pasqualotto, D.; Zigliotto, M. A comprehensive approach to convolutional neural networks-based condition monitoring of permanent magnet synchronous motor drives. IET ELECTRIC POWER APPLICATIONS 2021, pp. 1–16. [CrossRef]
- Mbo’o, C.P.; Hameyer, K. Bearing damage diagnosis by means of the linear discriminant analysis of stator current feature. 2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), 2015, pp. 296–302. [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; Bossio, J.M.; Leidhold, R. Fault Diagnosis in PMSM with Partitioned Stator Windings - Part I: Experimental Validation with Static Eccentricity. 2020 IEEE Congreso Bienal de Argentina (ARGENCON), 2020, pp. 1–7. [CrossRef]
- Rosero, J.; Romeral, L.; Rosero, E.; Urresty, J. Fault Detection in dynamic conditions by means of Discrete Wavelet Decomposition for PMSM running under Bearing Damage. 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, 2009, pp. 951–956. [CrossRef]
- Luo, P.; Yin, Z.; Yuan, D.; Gao, F.; Liu, J. An Intelligent Method for Early Motor Bearing Fault Diagnosis Based on Wasserstein Distance Generative Adversarial Networks Meta Learning. IEEE Transactions on Instrumentation and Measurement 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Atta, M.E.E.D.; Ibrahim, D.K.; Gilany, M.I. Detection and Diagnosis of Bearing Faults Under Fixed and Time-Varying Speed Conditions Using Persistence Spectrum and Multi-Scale Structural Similarity Index. IEEE Sensors Journal 2022, 22, 2637–2646. [Google Scholar] [CrossRef]
- Moon, S.; Jeong, H.; Lee, H.; Kim, S.W. Interturn Short Fault Diagnosis in a PMSM by Voltage and Current Residual Analysis With the Faulty Winding Model. IEEE Transactions on Energy Conversion 2018, 33, 190–198. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. High-Frequency Voltage Injection Based Stator Interturn Fault Detection in Permanent Magnet Machines. IEEE Transactions on Power Electronics 2021, 36, 785–794. [Google Scholar] [CrossRef]
- Wang, B.; Feng, X.; Zeng, J.; Wang, Z. A Novel Turn Fault Detection Strategy Based on High-Frequency Neutral-to-Ground Voltages. IEEE Transactions on Power Electronics 2023, 38, 15945–15955. [Google Scholar] [CrossRef]
- Dogan, Z.; Tetik, K. Diagnosis of Inter-Turn Faults Based on Fault Harmonic Component Tracking in LSPMSMs Working Under Nonstationary Conditions. IEEE Access 2021, 9, 92101–92112. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Sen, B.; Mills, A.R.; Chong, E.; Sun, Z. PWM Ripple Currents Based Turn Fault Detection for Multiphase Permanent Magnet Machines. IEEE Transactions on Industry Applications 2017, 53, 2740–2751. [Google Scholar] [CrossRef]
- Hu, R.; Wang, J.; Mills, A.R.; Chong, E.; Sun, Z. Current-Residual-Based Stator Interturn Fault Detection in Permanent Magnet Machines. IEEE Transactions on Industrial Electronics 2021, 68, 59–69. [Google Scholar] [CrossRef]
- Kumar, P.S.; Xie, L.; Halick, M.S.M.; Vaiyapuri, V. Stator End-Winding Thermal and Magnetic Sensor Arrays for Online Stator Inter-Turn Fault Detection. IEEE Sensors Journal 2021, 21, 5312–5321. [Google Scholar] [CrossRef]
- Ullah, Z.; Hur, J. Analysis of Inter-Turn-Short Fault in an FSCW IPM Type Brushless Motor Considering Effect of Control Drive. IEEE Transactions on Industry Applications 2020, 56, 1356–1367. [Google Scholar] [CrossRef]
- De Martin, I.D.; Brosch, A.; Tinazzi, F.; Zigliotto, M. Continuous Control Set Model Predictive Torque Control With Minimum Current Magnitude Criterion for Synchronous Motor Drives. IEEE Transactions on Industrial Electronics 2024, 71, 6787–6796. [Google Scholar] [CrossRef]
- Rama Krishna, M.S.; Seshadrinath, J. Stator Interturn Fault Modeling and Diagnosis for Synchronous Reluctance Motor Drive. 2022 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), 2022, pp. 1–6. [CrossRef]
- Laadjal, K.; Bento, F.; Henriques, K.; Cardoso, A.J.M.; Sahraoui, M. A Novel Indicator-Based Online Diagnostics Technique of Interturn Short-Circuit Faults in Synchronous Reluctance Machines. IEEE Journal of Emerging and Selected Topics in Power Electronics 2023, 11, 3492–3501. [Google Scholar] [CrossRef]
- Henriques, K.; Laadjal, K.; Cardoso, A.J.M. Inter-Turn Short-Circuit Fault Detection in Synchronous Reluctance Machines, Based on Current Analysis. Engineering Proceedings 2022, 24. [Google Scholar] [CrossRef]
- Guillén, C.E.G.; de Porras Cosano, A.M.; Tian, P.; Diaz, J.C.; Zarzo, A.; Platero, C.A. Synchronous Machines Field Winding Turn-to-Turn Fault Severity Estimation Through Machine Learning Regression Algorithms. IEEE Transactions on Energy Conversion 2022, 37, 2227–2235. [Google Scholar] [CrossRef]
- Pascual, R.; Mahtani, K.; Rivero, E.; Platero, C.A. Brushless Synchronous Machine Field Winding Interturn Fault Severity Estimation Through Deep Neural Networks. IEEE Transactions on Energy Conversion 2024, 39, 1341–1351. [Google Scholar] [CrossRef]
- Shaikh, M.F.; Kim, H.j.; Battulga, B.; Lee, S.B. Insight to Enhancing the Performance of the Pole Drop Test for Detecting Field Winding Turn Faults in Salient Pole Synchronous Motors. IEEE Transactions on Energy Conversion 2021, 36, 3582–3585. [Google Scholar] [CrossRef]
- Afrandideh, S.; Milasi, M.E.; Haghjoo, F.; Cruz, S.M.A. Turn to Turn Fault Detection, Discrimination, and Faulty Region Identification in the Stator and Rotor Windings of Synchronous Machines Based on the Rotational Magnetic Field Distortion. IEEE Transactions on Energy Conversion 2020, 35, 292–301. [Google Scholar] [CrossRef]
- Li, X.; Liu, W.; Jiao, N.; Sun, C.; Mao, S. Fault Diagnosis of Rotating Rectifier in Aircraft Wound-Rotor Synchronous Starter–Generator Based on Stator Currents Under all Operational Processes. IEEE Transactions on Power Electronics 2023, 38, 16072–16084. [Google Scholar] [CrossRef]
- Shaikh, M.F.; Park, J.; Park, Y.; Lee, S.B.; Antonino-Daviu, J.A. Electrical Testing for Detection and Classification of Open Damper Bar and Shorted Field Winding Failures in Wound Field Synchronous Motors. IEEE Transactions on Industry Applications 2022, 58, 4532–4541. [Google Scholar] [CrossRef]
- De Bisschop, J.; Vansompel, H.; Sergeant, P.; Dupre, L. Demagnetization Fault Detection in Axial Flux PM Machines by Using Sensing Coils and an Analytical Model. IEEE Transactions on Magnetics 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Mínaz, M.R.; Akcan, E. An Effective Method for Detection of Demagnetization Fault in Axial Flux Coreless PMSG With Texture-Based Analysis. IEEE Access 2021, 9, 17438–17449. [Google Scholar] [CrossRef]
- Lamprokostopoulos, A.; Mitronikas, E.; Barmpatza, A. Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators. Energies 2022, 15. [Google Scholar] [CrossRef]
- Mirimani, S.M.; Vahedi, A.; Marignetti, F.; Di Stefano, R. An Online Method for Static Eccentricity Fault Detection in Axial Flux Machines. IEEE Transactions on Industrial Electronics 2015, 62, 1931–1942. [Google Scholar] [CrossRef]
- Ogidi, O.O.; Barendse, P.S.; Khan, M.A. Detection of Static Eccentricities in Axial-Flux Permanent-Magnet Machines With Concentrated Windings Using Vibration Analysis. IEEE Transactions on Industry Applications 2015, 51, 4425–4434. [Google Scholar] [CrossRef]
- Levi, E. Advances in Converter Control and Innovative Exploitation of Additional Degrees of Freedom for Multiphase Machines. IEEE Transactions on Industrial Electronics 2016, 63, 433–448. [Google Scholar] [CrossRef]
- Sun, J.; Li, C.; Zheng, Z.; Wang, K.; Li, Y. A Generalized, Fast and Robust Open-Circuit Fault Diagnosis Technique for Star-Connected Symmetrical Multiphase Drives. IEEE Transactions on Energy Conversion 2022, 37, 1921–1933. [Google Scholar] [CrossRef]
- Liu, Z.; Fang, L.; Jiang, D.; Qu, R. A Machine-Learning-Based Fault Diagnosis Method With Adaptive Secondary Sampling for Multiphase Drive Systems. IEEE Transactions on Power Electronics 2022, 37, 8767–8772. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Gu, M.; Xiao, D.; He, J.; Emadi, A. Diagnosis-Free Self-Healing Scheme for Open-Circuit Faults in Dual Three-Phase PMSM Drives. IEEE Transactions on Power Electronics 2020, 35, 12053–12071. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.M.S. Online Diagnostic Method for the Detection of High-Resistance Connections and Open-Phase Faults in Six-Phase PMSM Drives. IEEE Transactions on Industry Applications 2022, 58, 345–355. [Google Scholar] [CrossRef]
- Mesai-Ahmed, H.; Jlassi, I.; Cardoso, A.J.M.; Bentaallah, A. Multiple Open-Circuit Faults Diagnosis in Six-Phase Induction Motor Drives Using Stator Current Analysis. IEEE Transactions on Power Electronics 2022, 37, 7275–7285. [Google Scholar] [CrossRef]
- Akay, A.; Lefley, P. Research on torque ripple under healthy and open-circuit fault-tolerant conditions in a PM multiphase machine. CES Transactions on Electrical Machines and Systems 2020, 4, 349–359. [Google Scholar] [CrossRef]
- Duran, M.J.; Gonzalez-Prieto, I.; Rios-Garcia, N.; Barrero, F. A Simple, Fast, and Robust Open-Phase Fault Detection Technique for Six-Phase Induction Motor Drives. IEEE Transactions on Power Electronics 2018, 33, 547–557. [Google Scholar] [CrossRef]
- González-Prieto, I.; Duran, M.J.; Rios-Garcia, N.; Barrero, F.; Martín, C. Open-Switch Fault Detection in Five-Phase Induction Motor Drives Using Model Predictive Control. IEEE Transactions on Industrial Electronics 2018, 65, 3045–3055. [Google Scholar] [CrossRef]
- Hu, K.; Liu, Z.; Tasiu, I.A.; Chen, T. Fault Diagnosis and Tolerance With Low Torque Ripple for Open-Switch Fault of IM Drives. IEEE Transactions on Transportation Electrification 2021, 7, 133–146. [Google Scholar] [CrossRef]
- Mesai-Ahmed, H.; Jlassi, I.; Cardoso, A.J.M.; Bentaallah, A. Multiple Open-Circuit Faults Diagnosis in Six-Phase Induction Motor Drives Using Stator Current Analysis. IEEE Transactions on Power Electronics 2022, 37, 7275–7285. [Google Scholar] [CrossRef]
- Wu, Y.; Olson, G.F.; Henriksson, C.; Peretti, L. Open Fault Detection in Variable Phase-Pole Machines Based on Harmonic Plane Decomposition. IEEE Transactions on Power Electronics 2024, 39, 4557–4566. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive Diagnosis and Tolerance Strategies for Electrical Faults and Sensor Faults in Dual Three-Phase PMSM Drives. IEEE Transactions on Power Electronics 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Femia, A.; Sala, G.; Vancini, L.; Rizzoli, G.; Mengoni, M.; Zarri, L.; Tani, A. A Machine-Learning-Based Interturn Short-Circuit Diagnosis for Multi-Three-Phase Brushless Motors. IEEE Journal of Emerging and Selected Topics in Industrial Electronics 2023, 4, 855–865. [Google Scholar] [CrossRef]
Figure 1.
Electrical machines statistical fault location [7].
Figure 1.
Electrical machines statistical fault location [7].
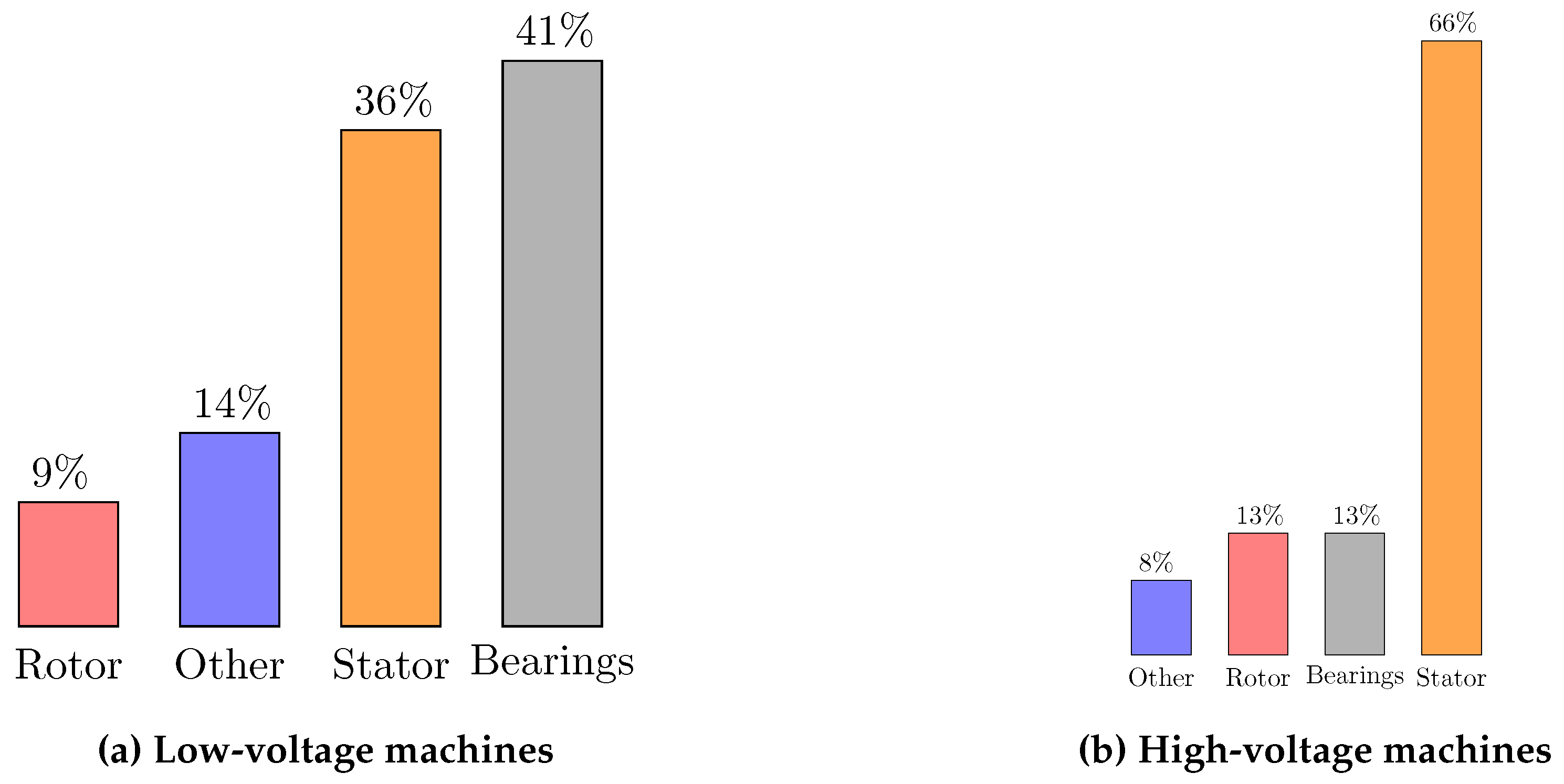
Figure 2.
Signal analysis methods [7].
Figure 2.
Signal analysis methods [7].
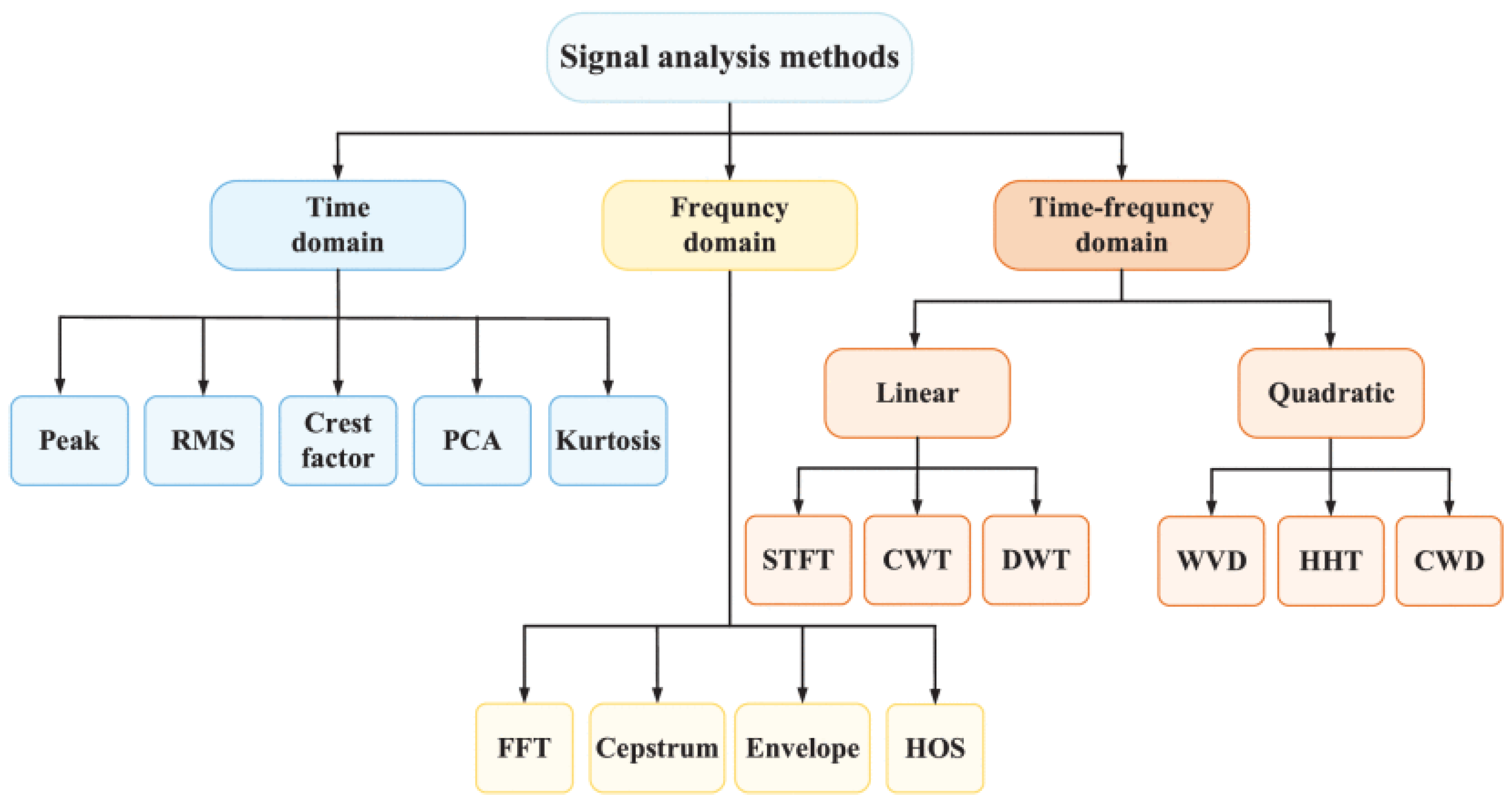
Figure 3.
Neural Networks FD process.
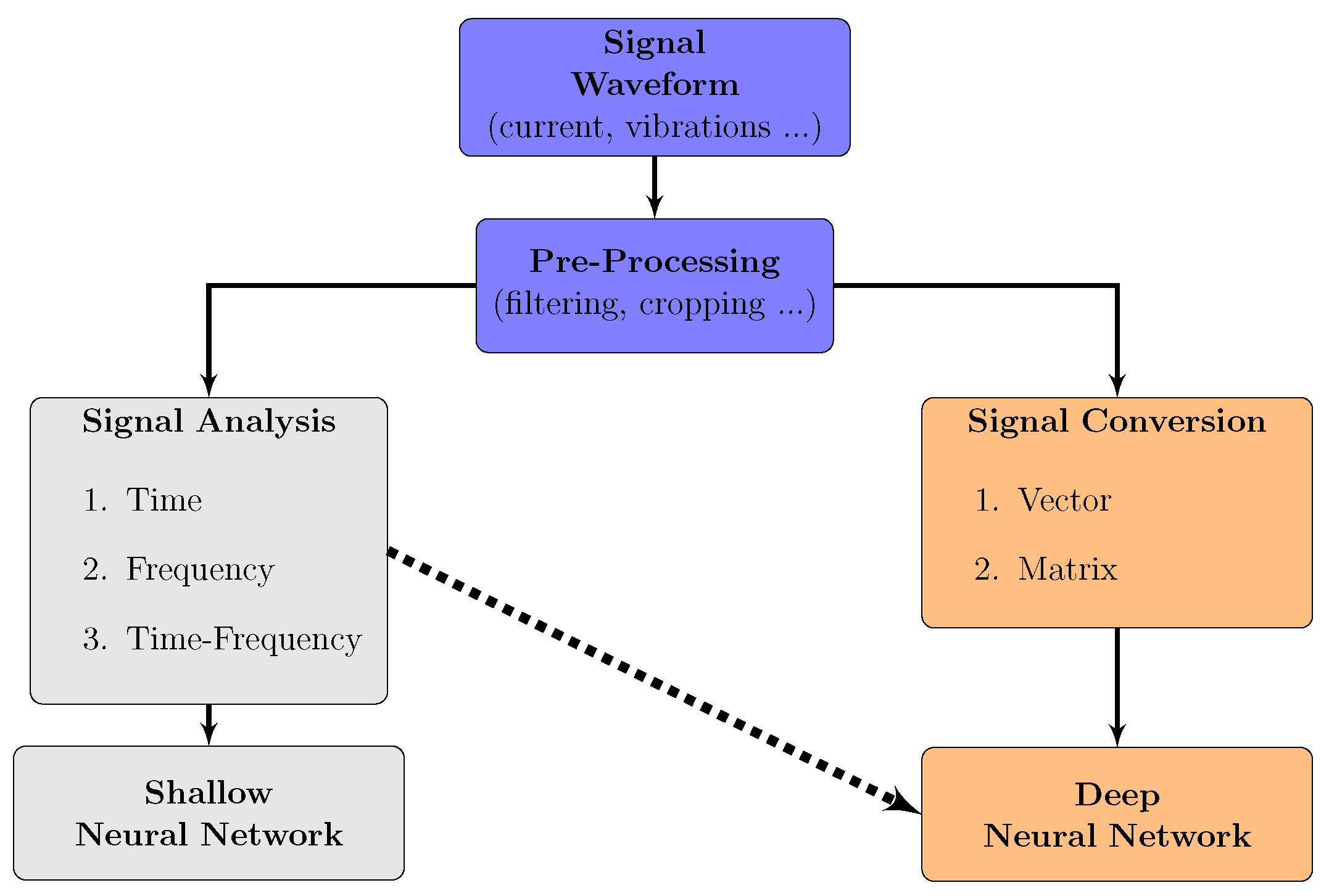
Figure 4.
Machine Learning topologies
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



