
Submitted:
22 October 2024
Posted:
25 October 2024
You are already at the latest version
Abstract
This paper aims to describe and analyze a relativistic engine that uses a permanent magnet and an electrically charged device. According to Newton’s third law, every action is met with an equal and opposite reaction, meaning the total force in a system unaffected by external forces is zero. However, relativity principles state that signals cannot travel faster than the speed of light, so actions and reactions cannot occur simultaneously. As a result, the total force cannot be zero at any given moment. This implies that the system gains mechanical momentum and energy over a finite period. The question then arises about how to uphold the law of momentum and energy conservation. It has been shown that the momentum is balanced by an equal and opposite momentum in the field, while the energy gained by the engine is offset by a reduction in the field’s energy. Previous analyses assumed that the bodies involved were macroscopically neutral, meaning the number of electrons and ions was equal in every volume element. This paper relaxes that assumption and examines charged bodies interacting with magnetic currents from permanent magnetic materials, exploring the implications for a charged relativistic engine based on a permanent magnet.
Keywords:
Electromagnetism
; Third Law of Newtonian Mechanics
; Special Relativity
1. Introduction
Relativity is a theory about the structure of space-time, introduced by Einstein in his well-known 1905 paper "On the Electrodynamics of Moving Bodies" [1]. This theory arose from empirical observations and the laws of electromagnetism, formulated in the mid-19th century by Maxwell in his famous four partial differential equations [2,3,4], which were later refined by Oliver Heaviside [5]. One consequence of these equations is that electromagnetic signals travel at the speed of light, c, leading to the understanding that light is an electromagnetic wave. Einstein [1,3,4] used this concept to develop his special theory of relativity, which states that the speed of light in a vacuum, c, is the maximum speed at which any object, message, signal, or field can travel. Because of this limitation, if someone at a distance R changes something, an observer will not be aware of it for at least a time of R/c. This means that actions and their reactions cannot happen simultaneously due to the finite speed at which signals propagate. Newton’s laws of motion are three fundamental principles that form the basis of classical mechanics. These laws explain the relationship between a body, the forces acting upon it, and its resulting motion. Isaac Newton first compiled these laws in his work "Philosophiae Naturalis Principia Mathematica" (Mathematical Principles of Natural Philosophy), published in 1687 [6,7]. This paper focuses on the third law, which states that when one body exerts a force on a second body, the second body exerts an equal and opposite force on the first body simultaneously. Newton’s third law states that in a system not influenced by external forces, the total sum of forces is zero and thus its center of mass cannot be accelerated. This law is supported by numerous experimental verifications and is a fundamental principle in physical sciences. However, because the speed of signal propagation is finite, actions and their reactions cannot occur simultaneously. Therefore, while Newton’s third law is not precisely accurate in this regard, it remains valid for most practical applications due to the high speed of signal propagation. Consequently, the total sum of forces cannot always be zero at every moment. Current locomotive systems rely on coupled material parts where each part gains momentum equal and opposite to the other, such as a rocket that moves forward by expelling gas. However, relativistic effects propose a different type of engine involving matter and field instead of two material elements. Initially, it might appear that the material body gains momentum, violating momentum conservation. Nevertheless, the field gains an equal and opposite amount of momentum, ensuring total momentum is conserved. This principle is supported by Noether’s theorem, which states that systems with translational symmetry conserve momentum. The overall system, comprising both matter and field, maintains this symmetry, though individual components do not. Feynman [4] describes a situation with two charges moving orthogonally, seemingly contradicting Newton’s third law because their induced forces do not cancel (last part of 26-2). This paradox is resolved (27-6) by noting that the momentum gained by the charges is balanced by the momentum lost to the field. A relativistic engine is defined as a system where the motion of its material center of mass results from the interaction of its components. These parts may move relative to each other or be fixed in a rigid frame, but the focus is on the center of mass’s motion. Notably, a relativistic motor enables 3-axis movement (including vertical), lacks moving parts, does not consume fuel or emit carbon, and solely uses electromagnetic energy, which can be provided by solar panels. This makes the relativistic engine ideal for space travel, where significant space in the vehicle is usually allocated for fuel storage. Griffiths and Heald [9] noted that Coulomb’s and Biot-Savart’s laws only define the electric and magnetic field configurations for static sources. Jefimenko [10] provided time-dependent generalizations of these laws to examine how Coulomb and Biot-Savart formulas can be modified to apply beyond static conditions. In a previous paper, we utilized Jefimenko’s [3,10] equation to investigate the force between two current loops [11]. This work was later expanded to include the forces between a current-carrying loop and a permanent magnet [12,13]. Since the device is subjected to force for a finite period, it acquires mechanical momentum and energy, enabling it to function as a relativistic engine. This raises the question of how to accommodate the law of momentum and energy conservation. The topic of momentum conservation was explored in [8]. Studies in [14,15,16,17] examined the energy exchange between the mechanical component of the relativistic engine and the electromagnetic field. Specifically, they demonstrated that the total electromagnetic energy used is six times the kinetic energy acquired by the relativistic motor. Additionally, they showed that improper coil configuration might lead to some energy being radiated from the relativistic engine device. Earlier investigations assumed that the bodies involved were macroscopically natural, implying that the charge of electrons and nuclei was equal in each volume element leading to a total null charge. However, this assumption was later relaxed [18], allowing for the study of charged bodies. Consequently, the analysis now includes an examination of the effects of charge on a potential electric relativistic engine.
The aim of this paper is to assess a relativistic engine that relies on a permanent magnet, specifically focusing on the interaction between a charged body (a capacitor) and the magnetic current generated by a permanent magnet. This configuration holds particular appeal for certain applications due to the self-sustaining nature of a permanent magnet, eliminating the need for an external power source.
2. Force Considerations
Consider an electric field and magnetic flux density that are created by entity 1 and acts upon entity 2. Entity 2 which may be a charged body contains nuclei and electrons, thus the Lorentz force is obtained:
In the equation provided, we perform integration across the entirety of charged body 2. Within this context, represents the ion charge density and denotes the electron charge density. Similarly, and respectively stand for the ion velocity field and the electron velocity field. The total charge density is the combined sum of the ion charge density and the charge density of free electrons, expressed as:
Thus, the electric terms in the above force expression add and we are left with:
We assume that the ions are at rest we thus have: . This leads to the expression:
Introducing the current density: , we obtain:
Now, let us examine the source that produces the fields. The electric and magnetic fields can be expressed using the vector and scalar potentials as follows [3]:
Here, is the nabla operator of vector analysis, t represents time and denotes a temporal partial derivative. Those expressions satisfy two out of the four Maxwell equations:
The other Maxwell equations relate the displacement and magnetic fields to the free charge and current densities:
The displacement and magnetic fields satisfy the relations:
In the above is the vacuum susceptibility, and is the vacuum permeability. is the polarization of the material under consideration, and is the magnetization of the same. Using the definitions:
Using the above definitions we may rewrite equation (9) as:
Notice that may contain a contribution of free current (a coil) and a magnetization current which can be generated by a permanent magnet. A field generated by a charge and current densities and can be obtained by solving equation (12) in terms of a scalar and vector potentials [3]:
Here, is the speed of light in vacuum. In the above we assumed that the potentials satisfy the Lorentz gauge conditions:
The gauge conditions satisfied at any time will be satisfied in all times due to the conservation of charge:
However, notice that1:
Since:
And:
Hence:
Inserting equation (21) into the magnetic field expression equation (17), we obtain Jefimenko’s magnetic field expression [3,10]:
Moving our attention to the electric field, and making use of equation (6), we obtain two contributions one from the scalar potential and another from the vector potential:
Hence according to equation (14):
And according to equation (13):
Above equation can also be written as:
however:
and also:
It thus follows that:
Adding and and considering that:
3. Retardation Effects
Consider the charge density , if is small but not null we can derive a Taylor series around t:
In the above, represents the nth order partial time derivative of . A similar expansion for the current density gives the following expression:
In the above, represents the nth order partial time derivative of . These expansions are valid only within a certain interval around t, which depends on the functions involved. This interval is defined by the convergence radius , which may vary for each function. Therefore, equation (33) and equation (34) are valid only within the domain . As we expand in the delay time , the expansion remains valid only within a limited range.
This implies that we are essentially working with a near-field approximation. However, since c (the speed of light) is significantly large, will be quite extensive for most systems. Now, by substituting equation (33) into equation (13), we obtain:
As it follows that:
We are now ready to calculate the electric and magnetic fields using the expansions provided in equation (36) and equation (38). Before proceeding, let’s introduce the following notation: let represent the contribution of order to the quantity G. Thus:
Hence:
However, since:
it follows that:
The zeroth-order contribution arises solely from the potential part of the electric field, which corresponds to the Coulomb component:
We also see that: , hence:
Therefore, there is no first-order correction to the charged system electric field, first-order corrections are also absent in an uncharged system [11]. The first term that includes scalar and vector potential contributions to the electric field is second order:
Since the contributions are quite small, it will be sufficient to consider terms up to the second order. We can now calculate the magnetic field using equation (17) and equation (41), thus we obtain:
However:
and also:
Hence we may write:
in particular:
With the expressions for the electric and magnetic fields, we can now determine the force’s nth order contribution using equation (5):
It follows that for the zeroth order we obtain:
Inserting equation (46), we obtain Coulomb’s force:
This type of force, known as the quasi-static force, adheres to Newton’s third law, ensuring that the total force on the system remains zero:
The first-order force in is null because both the first-order electric and magnetic fields are null, hence:
We will now move forward with computing the second-order force term, which is adequate as is quite small. To achieve this, we’ll initially split the force outlined in equation (54) into electric and magnetic components:
However,
it follows that:
Let us look at the integral:
Using the theorem of Gauss and charge conservation equation (16), we arrive at the following equation:
The surface integral is performed over a surface encapsulating the volume of the left-hand side integral, for the case that the volume integral is performed over all space the surface is infinite far. Provided currents at infinity are null:
We note that in the case of the magnetic field, the second order represents the lowest order for the force since both the zeroth and first orders yield null results. Additionally, it’s evident that the force comprises two components: one that adheres to Newton’s third law, and another that does not. The total electromagnetic force can be determined by combining equation (60) and equation (67):
Introducing the notation for clarity. From the above it is trivial to derive by exchanging the indices 1 and 2:
Now as and since:
It follows that:
In the subsequent section, we delve into the implications of the aforementioned formula. It’s worth noting that in certain rapidly changing systems, relying solely on the second order correction may not be adequate, necessitating the inclusion of higher order terms.
4. Momentum Generated
Newton’s second law dictates that a system with a nonzero total force, must have a modification of its cumulative linear momentum :
Assuming that: and that there are null current or charge densities at , we deduce from equation (72) that:
Comparing the momentum expression equation (74) with the momentum gained by a non-charged relativistic motor described in equation (64) of [8]:
In the equation provided, h represents a typical scale of the system, while and denote the currents flowing through two current loops, and signifies the line elements of the current loops. Several notable distinctions are apparent. Firstly, in the case of an uncharged motor, there is a factor of present. Given that for any practical system, the scale h is typically of the order of one, this implies that the charged relativistic motor is substantially stronger than the uncharged motor by a factor of , which is a significant difference. Secondly, it’s observed that for the uncharged motor, the current must be consistently increased to maintain momentum in the same direction. However, this is not sustainable indefinitely. As a result, the uncharged motor functions akin to a piston engine, executing periodic motion backward and forward, and can only produce forward motion by interacting with an external system, such as the road. Conversely, for the charged relativistic motor, non-vanishing momentum is obtained even for stationary charge and current densities.
Therefore, the charged relativistic motor has the capability to generate forward momentum without necessitating interaction with any external system apart from the electromagnetic field. This expression can be somewhat streamlined by employing the potential provided in equation (13), resulting in:
in which we are reminded that . Another important point is that in a charged relativistic motor we do not require both subsystems to be charged, in fact provided that :
Depending on a non-vanishing current density . We emphasize that as in [8] the forward momentum gained by the material system will be balanced by a backward momentum earned by the electromagnetic field. We shall now direct our attention to the challenges of developing a charged relativistic motor based on a permanent magnet.
5. Upper bounds
Consider the speed attained by a system such that its momentum is given by equation (78) with a total mass :
in which we have used the triangle inequality. If R has a minimum value we may write:
as and thus . Two cases can be now inspected considering the relative masses of the two subsystems and . If subsystem 2 is much more massive than subsystem 1, and in addition and the material density are uniform:
in the above is the total positive charge and is the total negative charge. Vice versa we can consider the case that subsystem 1 is much more massive than subsystem 2, and in addition and the material density are uniform:
where we assumed that the current density is unidirectional and is the typical length in the direction of current.
6. Configuration
Consider a permanent magnet which might be of the Neodymium type (see Figure 1). We will assume a magnetization in the z direction, according to equation (11) such a magnet has a magnetization current:
Assuming that the magnet has dimensions , and putting the origin of axis conveniently at the symmetry center of the magnet we may write the magnetization as:
In terms of the step function :
the box function can be written as:
We can now calculate the magnetization current using equation (83):
In the above we used the Dirac delta function which is related to the step function by the formulae:
Hence we see by comparing equation (88) to Equation (93) of [18] that the magnetization current density of uniform permanent magnet is equivalent to a continuous loop winding with a current density :
in which "thickness" refers to the winding thickness. Now by applying a thin conducting coating to the magnets at the planes and connecting it to a DC power source one may create a charge density:
In which the charge density is modelled as a plane charge located at the middle of the coating layer. In what follows the magnet is taken to be system 1 and the charge is taken to be system 2.
Plugging equation (91) and equation (88) into equation (78), (and taking only the current at for simplicity) we arrive at the following momentum equation:
Such that:
In which is the location of the reference charge plane (there are two). Defining the dimensionless variables:
We may write:
Considering the fact that the residual flux density is obtained when the forcing magnetic field H is null, it follows from equation (10) that:
Thus:
The dimensionless function depends on the dimensionless quantities . It can be calculated using the quadruple integral:
In which:
We shall perform part of this integration analytically. To achieve this goal, we define first the auxiliary function:
We shall now make a change of variables:
such that:
Finally, we define:
is integrated analytically using the new variable:
in terms of which:
Regrettably, the computation of and is only feasible through numerical methods. For the scenario where , the function is a function of a single variable, as illustrated in Figure 2.
It is apparent that when , the function equates to zero, whereas for , it converges to approximately , which is close to 3. Thus, if the ratio of the engine’s size to the capacitor thickness is roughly 20 and , there is no significant loss of force and momentum due to the return magnetic current. However, examining the scenario where as depicted in Figure 3, we observe a distinct advantage for a slender relativistic motor in the direction of motion.
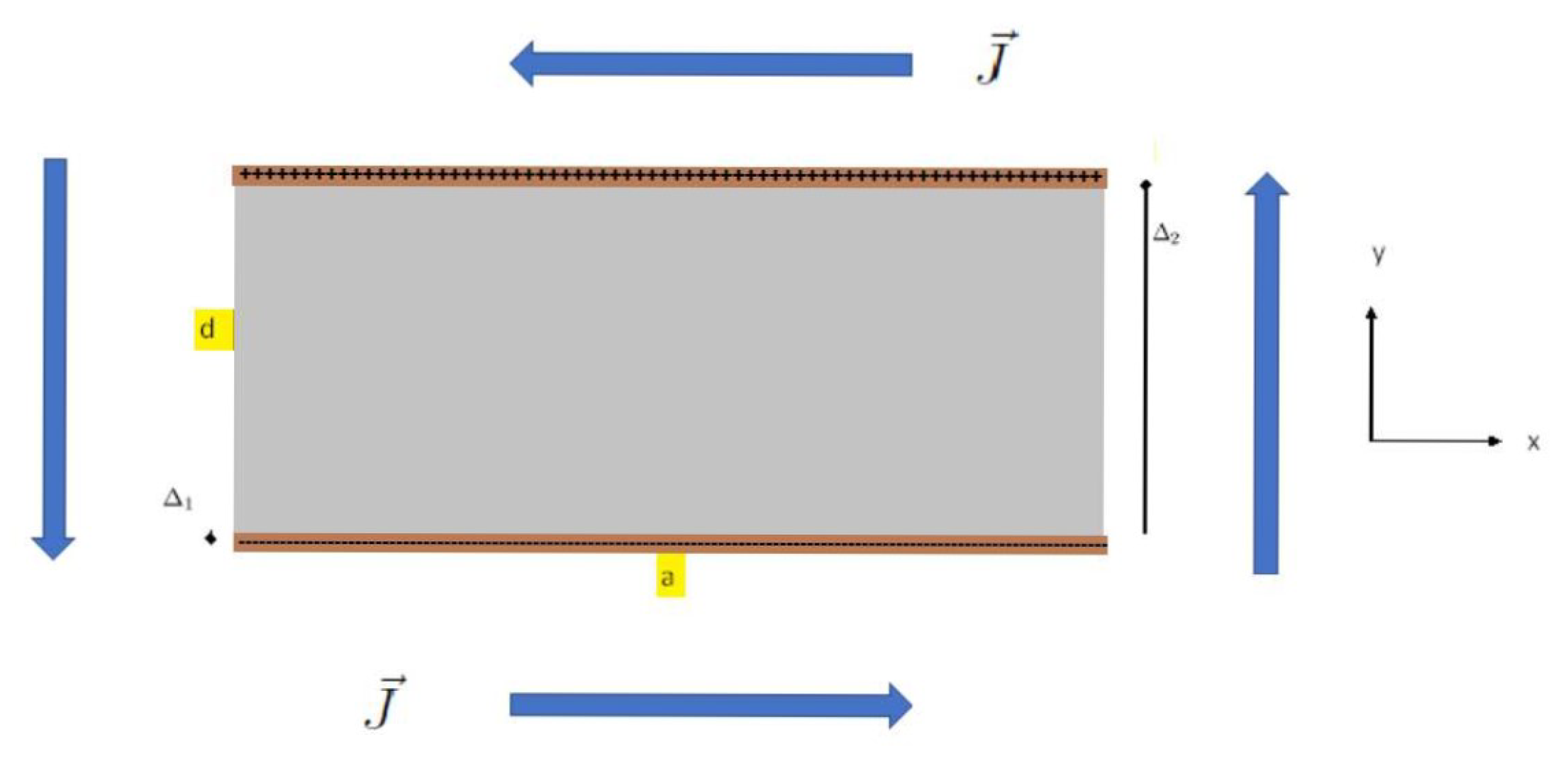
We also emphasize that the magnetic return current interacts symmetrically with the positive charge in a constructive way, as the charge sign and the current direction are reversed (see Figure 4) this doubles the momentum obtained such that following equation (95) we obtain:
and are explained through Figure 4 and have the corresponding values:
The force created by the relativistic motor will depend on the rise time of the capacitor charge which can be increased slowly or fast:
To consider the velocity of the device one need to calculate its mass of the magnet, now suppose that a magnet has a mass density it follows that its mass would be:
The maximal velocity obtained by an unloaded relativistic engine:
If the engine is loaded, that is it carries with it an additional load of mass the velocity will be:
The velocity has thus a typical value which depends on the properties of the magnet and the surface charge density of the coating layer:
multiplied by a factor that depends on the ratio of the geometrical dimensions of the system under consideration (magnet and coating):
The maximal speed can thus be written as:
The typical velocity is determined by the properties of the magnet: its residual magnetic flux density and it mass density. For a NdFeB magnet which is the strongest magnet that is available commercially we may assume Tesla and Kg/m3. The maximal surface charge density that one can put on a planar surface in air is Coulomb/ (see section 3.4 of [18]), trying to increase the surface density beyond this amount will cause a dielectric breakdown and a discharge. Thus the typical velocity for a neodymium magnet is:
which is quite small and thus strengthens the argument for a design of a practical relativistic motor on the nano and atomic scales and not on the macroscopic scale [19,20]. Of course one can improve on the above number by choosing suitable geometrical dimensions. Notice, however, that there are competing demands on one hand a light thin magnet should move faster, however, in this case the distance of the lower magnetic current plane to the positive charge plane will not be sufficient and thus the term will not be big enough. The same is true for increasing b (the dimension of the bar magnet which is parallel with magnetization). Of course, there are practical limitations to how big can one take b, but also there is a price to pay as one can see from Figure 3 since the factor favours a small b with respect to a. Thus optimization is required. Some numerical experimentation has shown that and extreme values of and d do not make much difference. A typical magnet with cm, cm and copper coating of about 1 micron, that is m, will yield . However, if we take cm, micron we can have a . This suggests that the effect can be observed if such a device is allowed to move unimpeded, for example after one day it will move 0.8 millimeter which can easily be observed with a magnifying glass.
7. Conclusions
We have demonstrated in this paper that in general Newton’s third law is not compatible with the principles of special relativity and the total force on a system of a permanent magnet and a charged capacitor is not zero. Still momentum and energy are conserved if one considers the field momentum and energy. It is suggested to perform some experimental work and prove the validity of the theory of relativity once again.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- A. Einstein, On the Electrodynamics of Moving Bodies, Annalen der Physik 17 (10): 891-921 (1905).
- J.C. Maxwell, A dynamical theory of the electromagnetic field, Philosophical Transactions of the Royal Society of London 155, 459-512 (1865).
- J. D. Jackson, Classical Electrodynamics, Third Edition. Wiley: New York, 1999.
- R. P. Feynman, R. B. Leighton & M. L. Sands, Feynman Lectures on Physics, Basic Books; revised 50th anniversary edition 2011.
- O. Heaviside, On the Electromagnetic Effects due to the Motion of Electrification through a Dielectric, Philosophical Magazine, (1889).
- I. Newton, Philosophi Naturalis Principia Mathematica, 1687.
- H. Goldstein, C. P. Poole Jr. & J. L. Safko, Classical Mechanics, Pearson; 3rd edition, 2001.
- M. Tuval and A. Yahalom, Momentum Conservation in a Relativistic Engine, Eur. Phys. J. Plus 131, 374 (2016). [CrossRef]
- D. J. Griffiths & M. A. Heald, "Time dependent generalizations of the Biot-Savart andCoulomb laws" American Journal of Physics, 59, 111-117 (1991).
- O. D. Jefimenko, Electricity and Magnetism, Appleton-Century Crofts, New York 1966; 2nd edition, Electret Scientific, Star City, WV 1989.
- Miron Tuval & Asher Yahalom "Newton’s Third Law in the Framework of Special Relativity" Eur. Phys. J. Plus (11 Nov 2014) 129: 240. [CrossRef]
- Miron Tuval and Asher Yahalom "A Permanent Magnet Relativistic Engine" Proceedings of the Ninth International Conference on Materials Technologies and Modeling (MMT-2016) Ariel University, Ariel, Israel, July 25-29, 2016.
- Asher Yahalom "Retardation in Special Relativity and the Design of a Relativistic Motor".Acta Physica Polonica A, Vol. 131 (2017) No. 5, 1285-1288.
- Asher Yahalom "Preliminary Energy Considerations in a Relativistic Engine" Proceedings of the Israeli-Russian Bi-National Workshop "The optimization of composition, structure and properties of metals, oxides, composites, nano - and amorphous materials", page 203-213, 28 - 31 August 2017, Ariel, Israel.
- S. Rajput and A. Yahalom, "Preliminary Magnetic Energy Considerations in a Relativistic Engine: Mutual Inductance vs. Kinetic Terms" 2018 IEEE International Conference on the Science of Electrical Engineering in Israel (ICSEE), Eilat, Israel, 2018, pp. 1-5. [CrossRef]
- S. Rajput and A. Yahalom, "Material Engineering and Design of a Relativistic Engine: How to Avoid Radiation Losses". Advanced Engineering Forum ISSN: 2234-991X, Vol. 36, pp 126-131. Submitted: 2019-06-16, Accepted: 2020-05-18, Online: 2020-06-17. ©2020 Trans Tech Publications Ltd, Switzerland.
- Shailendra Rajput, Asher Yahalom & Hong Qin "Lorentz Symmetry Group, Retardation and Energy Transformations in a Relativistic Engine" Symmetry 2021, 13, 420. [CrossRef]
- Rajput, Shailendra, and Asher Yahalom. 2021. "Newton’s Third Law in the Framework of Special Relativity for Charged Bodies" Symmetry 13, no. 7: 1250. [CrossRef]
- Yahalom, Asher. 2022. "Newton’s Third Law in the Framework of Special Relativity for Charged Bodies Part 2: Preliminary Analysis of a Nano Relativistic Motor" Symmetry 14, no. 1: 94.
- Yahalom, Asher. 2023. "Implementing a Relativistic Motor over Atomic Scales" Symmetry 15, no. 8: 1613. [CrossRef]
| 1 | We use the notation . |
Figure 1.
A block Neodymium magnet
Figure 2.
The function for the case .
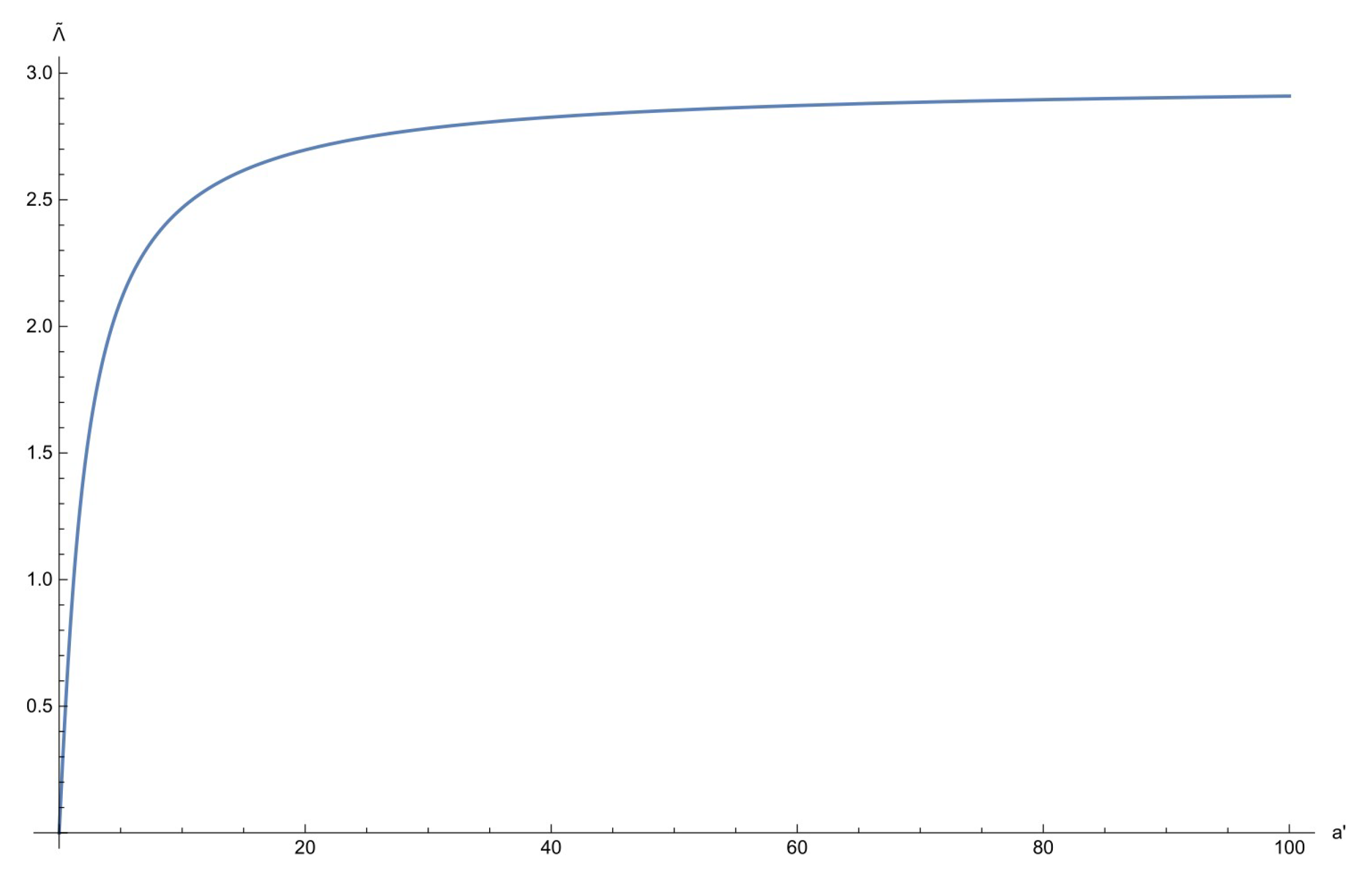
Figure 3.
The function for the case , the color code is shown to the right of the contour plot.
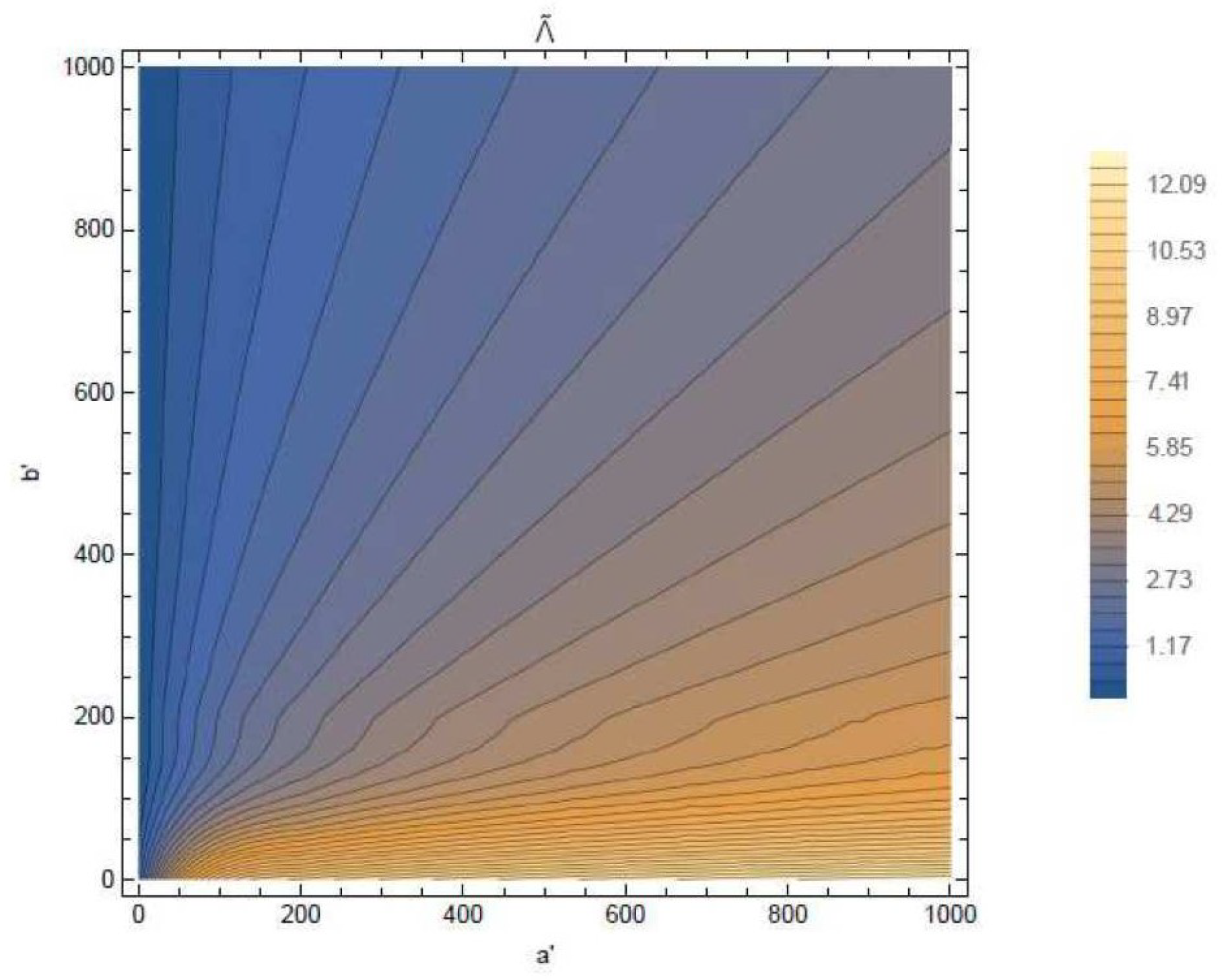
Figure 4.
A cross section of the relativistic engine.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



