
Submitted:
29 October 2024
Posted:
31 October 2024
You are already at the latest version
Abstract
The electric vehicle market is constantly evolving, with research and development efforts to improve motor technologies and address current challenges to meet the growing demand for sustainable transportation solutions well underway. Electric vehicles are crucial to the global initiative to reduce carbon emissions. The core component of an electric vehicle is its motor drive technology, which has seen significant advancements and diversification in recent years. Although alternating-current motors, particularly induction and synchronous motors, are widely used for their efficiency and low maintenance, direct-current motors provide high torque and cost-effectiveness advantages. This study examines various electric motor technologies used in electric vehicles and compares them using several parameters such as reliability, cost, and efficiency. This study presents a multi-criteria comparison of the various electric motors used in the electric traction system to provide a picture that enables selecting the appropriate electrical motor for the intended application. Although the permanent magnet synchronous motor appears to be the popular choice among electric car makers, the proposed comparative study demonstrates that the induction motor matches the essential requirements of electric vehicles.
Keywords:
analytical hierarchical process
; electric vehicle
; drive technologies
; power density
; efficiency
; reliability
; performance criteria
1. Introduction
Electric vehicles (EVs) represent a significant change in automotive technology, aiming to reduce carbon emissions and dependency on fossil fuels [1,2]. The revolution of electric vehicles has the potential to create enormous economic opportunities. EVs are generally cheaper to operate than gasoline and diesel cars, and some estimates suggest that the operation of EVs can be three to five times less expensive [3]. EVs have seen a resurgence in recent years, and with this, motor drive technologies have evolved to meet the demands of efficiency, reliability, and cost-effectiveness. Electric vehicles can be classified according to their fuel efficiency, travel range, intended use, structure, and design. Figure 1 illustrates how electric vehicles can be divided into two main categories [4,5].
In Figure 1, hybrid electric vehicles (HEVs) combine a traditional internal combustion engine with an electric motor and a battery system. HEVs use gasoline or diesel engines in conjunction with an electric motor. The battery pack that energizes the electric motor is replenished through regenerative braking and the internal combustion engine rather than plugging in. This combination of power sources provides HEVs with better fuel efficiency and lower emissions compared to traditional internal combustion engine vehicles. The electric motor supports the engine, reducing its burden and enabling it to operate more effectively.
Plug-in hybrid electric vehicles (PHEVs) are hybrid vehicles that can be charged via an electrical outlet. This feature allows them to drive purely on electricity for short ranges before transitioning to hybrid mode, utilizing an electric motor and a gasoline engine. These vehicles can recharge their batteries by connecting to the electrical grid. As a dual-fuel electric vehicle (EV) with additional charging functionalities compared to standard hybrid electric vehicles, PHEVs incorporate medium-capacity batteries that support several dozen kilometers of electric-only travel. This electric vehicle offers superior performance, increased efficiency, and reduced carbon emissions. PHEVs come in three main configurations: series hybrid, parallel hybrid, and a combination of parallel-series setups known as power split [4].
Battery electric vehicles (BEVs) rely solely on rechargeable battery packs for power and do not contain an internal combustion engine. This makes them zero-emission vehicles. The full energy needed for their functioning comes from a high-capacity battery system, which can be replenished via the electrical grid [5]. BEVs offer benefits such as instant torque, quieter operation, and lower fuel and maintenance costs. Limitations such as shorter driving ranges compared to gas vehicles, longer charging times, high starting costs, and battery deterioration are the main problems of BEVs.
The heart of an electric vehicle is its motor drive system, which converts electrical energy into mechanical energy to propel the vehicle. Advancement of electric vehicles (EVs), with various motor types offering distinct advantages and challenges [6,7]. Electric motors provide quiet, smooth operation and stronger acceleration and require less maintenance than gasoline-powered engines. The responsive performance and immediate power of electric motors ensure a comfortable driving experience, especially during quick maneuvers in traffic. Figure 2 shows a typical block diagram of the electric vehicle.
The grid block represents an external single-phase or three-phase power supply to power up or charge the battery. Depending on the application (on-board or off-board), the AC-DC converter might be single-phase or three-phase. Additionally, if the application is intended for vehicle-to-grid (V2G) communication, the converters may be bidirectional. AC-DC converters with bidirectional functionality connected to the grid encounter issues such as grid frequency synchronization, power factor correction, and high-quality isolation. These challenges influence their overall weight and cost [9].
Batteries and ultracapacitors make up the battery pack. Lead-acid, nickel metal hydride (NiMH), or lithium-ion (Li-ion) batteries can all be found in a battery pack. Because of their high energy density, superior specific energy, low discharge rate, compact size, and low maintenance requirements, lithium-ion batteries are used in modern battery-powered vehicles (BPV) [10]. The traction motors on the load side of the battery pack receive power from the DC-AC converter. Modern BPVs employ bidirectional DC-AC converters to enable regenerative braking, which has replaced older unidirectional motors. The DC-DC converters are designed for DC loads.Figure 2 shows the flexibility in the use of PHEV fuel using the gasoline engine block as a substitute source of energy [11,12].
2. Electric Vehicle Motor Technologies
Electric motor drive technologies are pivotal in the development of electric vehicles (EVs), with various types of motors offering distinct advantages and challenges. Figure 3 illustrates types of EV motor drives available in the market, including direct current (DC) motors, induction motors (IM), permanent magnet motors (PM), and resistance motors (RM), each with its own set of advantages and limitations [13]. DC motors have historically been used in electric vehicles due to their simple design and good low-speed torque characteristics. DC motors have good low-speed torque, are easy to control, and have well-established technology. They are less efficient and require regular maintenance due to brush wear [13].
Induction motors (IMs) are widely used in electric vehicles due to their simplicity, reliability, and low cost. Figure 4 shows the torque, power, and speed characteristics of the IMs. In addition, they are reasonably priced, require little maintenance, and have a robust design. However, compared to alternative technologies such as PM and RM, they are less efficient, have a lower power density, and are heavier and bulkier [14]. They do not require rare-earth materials, which can be a significant advantage in terms of supply chain management. In addition, they demonstrate relatively weaker torque response at low speeds compared to PM and DC motors. However, IMs, particularly squirrel-cage, are well-established technologies that provide an optimal blend of affordability, power density, and speed range, rendering them appropriate for large-scale electric vehicles [15].
Permanent magnet motors (PM) drives provide excellent torque control, low maintenance, high efficiency, and high power density [13,14,15]. They are known for their smooth operation, which can enhance the driving experience. Although they are frequently found in EVs, their high cost and constrained scalability are disadvantages. Because rare earth magnets are prone to demagnetization at high temperatures, the high cost is ascribed to them. Reliance on rare-earth permanent magnets may have an impact on the sustainability of the supply chain and costs. In recent times, reluctance motors have gained traction as cost-effective solutions with high torque density. Modern control techniques and power electronic converters are being used to address their limitation of constant speed application making no speed control possible due to its rigid speed [15]. The efficiency and compactness of brushless DC motor drives (BDCM) also make them a viable option. An alternative to EV propulsion is the use of switched reluctance motor (SRM) drives [16]. SRM drives may be the best option due to their fault tolerance, cost, weight, and efficiency, according to a comparison study of various electric motor drives for EVs [18]. Due to their dependability, affordability, and capacity to operate in challenging conditions, SRMs are becoming more and more popular in a variety of applications. They are particularly noted for their magnet-free construction and flexible controls, making them suitable for electric vehicles. However, challenges such as torque ripple, vibration noise, and wind resistance at high speeds are areas of active research. SRMs are preferred for their low cost, robust construction, and high reliability in harsh environments, making them suitable for electric vehicles and aircraft systems [19]. Segmented SRMs (SSRMs) have been developed to maximize torque performance and reduce torque ripples [19]. SRMs face high torque ripple and acoustic noise, but recent advancements have proposed solutions to mitigate these problems [20,21]. Optimizing air gap dimensions and other design parameters can enhance the performance of SRMs [21]. Advanced control methods, such as self-adjusting PID control strategies, have been implemented to improve SRM performance, particularly in speed adjustment applications [22]. Reluctance motors operate based on magnetic reluctance to produce torque, leading to a more straightforward and economical design. However, a significant drawback of RM is its reduced power factor, which requires sophisticated control algorithms to achieve optimal performance. Transverse flux machines (TFMs) are deemed ideal for electric vehicle (EV) applications because they provide the highest power and torque density at low speeds, according to an initial comparative analysis [23,24]. These technologies will be thoroughly reviewed, and their performance, efficiency, and applicability for EV applications can be evaluated using a multi-criteria analysis. This review compares electric vehicle motor types and performance standards, which are important for developing and improving electric vehicles.
3. Comparison of Electric Vehicles Motor Technologies Based on Multi-Criteria Analysis
EV traction motors must meet different types of operational parameters than those utilized in industries. While most loads in industries are steady and categorized, an EV driving on a road may need to alter its speed, provide more torque while descending hills, and brake suddenly. The primary requirements for electrical machines used in traction include a fast and responsive torque response, significant power density at low speeds for starting and scaling, and consistent power at higher speeds. In addition, machines must have high efficiency across a wide range of speeds with constant torque and power, as well as an overload capacity that can handle up to twice the rated engine torque for brief periods. Finally, the vehicle must have the ability to tolerate faults, inertia, reasonable cost, robustness, and great dependability [27,28]. Determining which factors are more important than others is one of the most challenging aspects of decision-making. Multi-criteria decision-making tools can be used to circumvent this challenge. Multi-Criteria Decision Making (MCDM), also known as Multi-Criteria Decision Analysis (MCDA), refers to approaches, including software, to make decisions where various criteria (or objectives) must be analyzed and compared to rank or select options [29].TOPSIS is a method developed on the fundamental principle that the best solution is closest to the ideal positive solution and the farthest from the ideal negative solution. Alternatives are evaluated using an overall index determined by their proximity to the ideal solutions [30]. The Analytical Hierarchy Process (AHP) is a decision-making methodology based on mathematics and psychology. AHP helps to make sense of complex decisions by breaking them down into a hierarchy of goals, criteria, and alternatives. The pairwise comparisons are then used to evaluate and rank the criteria and alternatives. Fuzzy decision-making encompasses various single and multi-criteria methods for selecting the optimal option when dealing with uncertain, partial, and unclear information. Classification is based on these recent extensions of fuzzy sets: intuitionistic, hesitant, and type-2 fuzzy sets [31]. Applying the Analytical Hierarchical Process (AHP) technique, which has a strong mathematical base, could effectively solve this problem. AHP can be a valuable technique for conducting a multi-criteria comparison of electric vehicle motor technologies. AHP provides a structured approach to evaluating and prioritizing different factors based on their relative importance. Due to its ease of use, AHP has been used as a decision-making tool in numerous situations [32,33,34,35,36,37,38,39,40,41,42].
Based on different paradigms, in this part, we examine and assess different types of electric vehicle motor technologies for use in EV applications. The following factors are used to define the criteria: the overall energy conversion efficiency of the motor, the power output per unit of motor volume or weight, the level of noise and vibration generated by the motor, the expenses associated with motor production and materials that determine the final cost of the vehicle, and finally the longevity and ability of the motor to withstand breakdowns [43,44,45,46,47]. The score was scaled from worst to best for a better understanding of each characteristic. With only a small relationship from qualitative to quantitative characteristics at certain values, such as torque ripple, the magnitude of this technique is fully defined by literature research to provide a logical and presentable outcome. An assessment matrix A can be used to summarize the pairwise comparison for n criteria.
At this stage, normalization and the assignment of relative weights for each matrix are performed. Relative importance is assessed using a scale of 1 to 5, where 1 signifies equal importance and 5 signifies extreme importance. The normalized eigenvector is calculated to determine the weights of the criteria. To determine the normalized eigenvector , calculate the alternate scores for each criterion. Weight and Score Synthesis: The total score for each alternative is derived by summing the weighted scores of the criteria.:
The AHP equations can be summarized as follows: Pairwise Comparison Matrix A:
Normalized Eigenvector w:
where () is the maximum eigenvalue of A
The resulting scores can be used to classify electric motor technologies according to the criteria. The highest eigenvalues () that match the right eigenvector (w) produce relative weights according to [48].
The consistency of the pairwise comparison judgments directly affects the quality of the AHP output. The following are the consistency ratio (CR) and consistency index (CI): (RI, or random index).
The recognized upper bound for the CR is 0.1. The review process must be repeated to increase consistency if the final consistency ratio exceeds this threshold. The hierarchy as a whole and decision makers are evaluated based on consistency [49]. Decision-makers can benefit from using Saaty’s importance scale, which he proposed for pairwise comparison. Figure 5 provides various level analysis using the AHP methodology.
As illustrated in Figure 5, these are the main criteria we used to evaluate and compare the five electric motors that we ultimately chose. Apart from the aforementioned parameters that are more directly related to internal characteristics, energy consumption, and technological specifications, there exist a plethora of other criteria. The upkeep and durability of the motors are the key effects of these extra requirements. A higher score indicates a better element based on the criteria provided in the graphs and by scoring each motor type.
3.1. Efficiency
Electric vehicles convert the electrical energy stored in batteries into mechanical energy to drive the vehicle, employing various types of electric motors. For electric vehicles to operate well overall and have a sufficient range, their motors must be efficient. Consider N vertexes and k layers of multi-criteria performance polygons (MCPG) shown inFigure 6. Each alternative is represented as a polygon in a multi-dimensional space, where each vertex corresponds to a specific performance criterion. The number of vertices represents the number of performance criteria, while the number of layers denotes the degree or level of a performance index. Multi-criteria performance of entities can easily be assessed by superimposition of their indices on MCPG. It can easily be seen inFigure 6, concerning controllability, the DC motor achieves the highest rank of 5, while the PMBLDC motor has the rank of 2. Similarly, based on thermal management, the PMBLDC motor has a rank of 5, while the DC motor has a rank of 4. A similar analysis can be done for other types of motors using various performance indices such as cost, weight, ripple torque, etc. For each selected criterion, adjusting its priority weight while keeping the weights of the other criteria proportional to their initial values can help in analysis and decision-making. You can increase or decrease the weight of the criterion by a certain percentage to see the impact and relationship of the chosen criteria. According toFigure 6, BLDC motors typically exhibit higher efficiency than IM and SRM, which is essential for lowering energy consumption and increasing vehicle range [63]. Our examination reveals that, for electric vehicle applications, PMSMs and SRMs are the most efficient motor types. PMSMs provide the highest efficiency and power density, whereas SRMs are known for their high reliability and economic advantage. Despite their efficiency, BLDC motors are less favored compared to PMSMs and SRMs due to cost and reliability issues. Induction motors, which offer a balance between cost and efficiency, are suitable for certain applications. DC motors are less commonly used in modern electric vehicles because of their lower efficiency [51,52,53].
All motor types support regenerative braking, though their efficiency differs, which can affect the vehicle’s total energy recovery. Efficiency maps of motors are utilized to enhance motor performance under various operating conditions. BLDC motors are highly efficient, with efficiency ratings around 94.9% [64]. Power electronics are crucial for the efficiency of electric motors, as they control the voltage and current delivered to the motor. The effectiveness of power electronics is vital for overall system efficiency and differs across various motor types [65].
3.2. Power Density
This metric indicates the power generated or delivered per unit weight of the system, demonstrating the weight efficiency. Considering multiple motors with the same power, voltage, and speed characteristics, PMSM and BLDC motors are noted for their high power density, making them the preferred choice for many high-performance applications, including electric vehicles and hybrid vehicles [54].
As seen in Figure 7, BLDC motors have a smaller size and lighter weight than other types of motors, potentially improving vehicle handling and packaging.
As illustrated in Figure 8, each motor type is represented as a polygon, with vertices corresponding to index values of power density, speed range, and simplicity of control. BLDC and IM have a rank of 5, which is the highest in control simplicity. Despite their conventional limitations, SRM motors are becoming viable competitors thanks to improvements in materials and engineering. They provide excellent power density and efficiency, particularly with the incorporation of cobalt-iron laminations. Although induction motors have a lower power density, they are advantageous in terms of control and affordability [66,67].
3.3. Torque Ripple
Torque ripple causes noise and vibration, affecting stability and rider comfort. Torque ripple significantly impacts driving comfort. This is illustrated in Figure 9; SRM motors exhibit a higher incidence of the ripple phenomenon. The lower torque density, increased torque pulsation or ripples, and acoustic noise have made them unsuitable for EVs. PMSM and BLDC have low torque ripple, while SRM has high torque ripple, which can lead to less smooth operation. To eliminate torque ripples, use control approaches such as pre-computed current profiling [63]. The integration of the converter and the motor creates vibration as well. Electronic converter boards are fragile and susceptible to vibrations. Techniques must be developed to optimize the drive and address these issues.
3.4. Cost Analysis
Creating an efficient and economical electric vehicle is an enormous issue for manufacturers.
As seen in Figure 10, PMSM motors tend to be expensive because they utilize rare earth magnets. The expense of these materials greatly influences the total production cost. In addition, they are small and lightweight, providing a high power-to-weight ratio, which is advantageous for EV applications. Induction motors are more economical than PMSM and BLDC motors [55,56]. Figure 11 demonstrates a comparative analysis of cost versus size for various electric vehicle motors.
They do not need rare-earth materials, which helps reduce manufacturing costs. However, induction motors are heavier and bulkier compared to PMSM and BLDC motors, which can affect vehicle handling and packaging [57,58].
SRM motors feature the simplest design among all motor types, resulting in moderate manufacturing costs. The absence of magnets further decreases their cost. SRM motors are small and offer a high power-to-weight ratio, much like BLDC motors. BLDC motors are pricier than induction motors because they use magnets, but are typically less expensive than PMSM motors. BLDC motors are also compact and lightweight, providing a high power-to-weight ratio, which is beneficial for EV applications [59,60,61]. In conclusion, each motor type has its own set of cost and size characteristics that make it suitable for different EV applications. DC motors tend to be the least expensive option, with relatively simple and inexpensive construction. BLDC and IM motors are moderately priced, with BLDC motors slightly more expensive due to the required electronic controller. PMSM motors are typically the most expensive, as they require rare-earth permanent magnets, which can be costly.SRM motors are also relatively expensive, with complex control electronics adding to the costs. In conclusion, For low-budget applications, DC and Induction motors are cost-effective. For high-efficiency, high-performance requirements, PMSM and BLDC motors are worth the higher cost. SRM motors offer a middle ground, being cost-effective with emerging applications, especially in EVs.
3.5. Reliability
Environmental, climatic, electrical, and mechanical factors all affect the life of a motor. Mechanical wear and strain on bearings, including issues such as fractured rotor bars in induction motors, contribute to motor reliability [62]. Electrical factors such as voltage, high-bearing currents, and strains, particularly in the insulation and coils of motors, contribute to motor reliability. Temperature, humidity, and external vibration are examples of environmental factors that affect motor reliability. Consider the N vertices and k layers of multi-criteria performance polygons (MCPG) shown in Figure 12. Each alternative is represented as a polygon in a multi-dimensional space, where each vertex corresponds to a specific performance criterion. The number of vertices represents the number of performance criteria, while the number of layers denotes the degree or level of a performance index. Multi-criteria performance of entities can easily be assessed by superimposition of their indices on MCPG. It can easily be seen in Figure 12 that concerning robustness, SRM has a rank of 5, which is the highest, while IM has a rank of 1. Similarly, based on the lifespan, the SRM has a rank of 5, while the DC motor has a rank of 1. Compared to other motors, the SRM also has a longer life and is less prone to aging because it eliminates permanent magnets [60]. As seen in Figure 13, SRM and IM are typically more robust and reliable in harsh conditions, while PMSM and BLDC may be less durable due to thermal and material constraints.
Table 1 provides a comparison of electric vehicle motors based on the boundary specification parameters of current vehicles gathered from numerous sources and based on our comparison.
Data comparison can yield insights, but doing so is difficult without considering vehicle design, traction system architecture, and/or hybridization approach. Certain vehicles have two motors, while others only have one; in addition, the motors vary in several ways. Because of this, it is challenging to draw meaningful comparisons across various machines; however, it is useful to observe some trends, most notably the move from induction (IM) to permanent magnet (PM) machines for the majority of traction applications.
Although the compared study features for electric motors can be useful, the ranking becomes less clear when considering the role of power sources, electronic components, intelligent control, and diagnostic processes in improving the desired variables. It is therefore challenging to meaningfully compare different models. However, it is instructive to look at some trends, such as the application domains, types, and fields, as well as the desired goals and criteria that electric vehicles must meet. We utilized the AHP (Analytic Hierarchy Process) approach, a multi-criteria decision-making technique, where criteria are assigned weights or coefficients to facilitate a rational comparison.
4. Selection Consideration
A broad comparison of motors based on comparable ratings is presented in Figure 14. IM features great fidelity, low power density, and average acceleration. Among the motors that EV manufacturers most favor are IMs. According to the theory that IMs may be advantageous for a variety of driving cycles, the high-efficiency zone for an induction machine is situated between the high-efficiency zones of a PMSM and an SRM. Synchronous machines are more efficient at lower speeds and use less battery power and propellant. When a constant torque is required, synchronous motors are preferred.
Large maintenance and controller expenses accompany the superior power density, high productivity, and compact size of BLDC motors. DC motors are easier to operate and offer a lot of torque at reduced speeds, but they also have a large support cost, an oversized structure, and poor efficiency. Due to their excellent dependability, efficiency, and internal fault tolerance capacity, SRMs are an appealing alternative because the motor/controller ensemble is less expensive than other solutions. Permanent magnet and induction motors are considered the best options when evaluating all criteria, while synchronous reluctance motors excel in performance affecting the hybrid storage system. The ideal motor technology for an electric vehicle depends on the specific application and priorities. Performance-oriented EVs might prioritize high power density (PMSM), while budget-conscious city cars might favor lower cost (IM, SRM). High-efficiency motors (PMSM, BLDC) can extend the driving range on a single charge. For fast acceleration and high torque, PMSM or BLDC might be preferred. Budget limitations favor induction motors or switched reluctance motors. Electric vehicles benefit from higher efficiency, instant torque, reduced maintenance, and regenerative braking capabilities.
5. Conclusions
An assessment of the essential characteristics of different motors utilized in electric vehicles is provided based on the preceding analysis and discussion. The primary conclusions drawn from this analysis highlight that induction motors and PM brushless motors are superior regarding energy efficiency, cost, and performance. Induction motors are regarded as the top choice. Decades of research have refined DC motors into highly advanced technology, but they are predominantly found in light vehicles; heavy-duty vehicles transition to AC motors after long periods of DC motor usage. Taking into account maintenance factors; IM, PMSM, and SRM show significant improvements and demand minimal maintenance. Consequently, PMBLDC motors are positioned at the bottom of the hierarchy. The global findings on motor type classification, which account for selected variables are depicted in Figure 14. Along with demonstrating that designing the topology of electrical machines for electric traction applications is often a complicated issue requiring consideration of various scientific aspects, such as electromagnetic, mechanical, thermal, and power electronics, the paper also offers a review of the process of selecting an appropriate electric motor type for electric traction applications. Future trends and innovations should emphasize on development of new materials and control techniques that are constantly pushing the boundaries of electric motor drive technologies. Advancements in oil cooling and thermal management will enhance motor performance. A holistic approach to innovation involving materials, integration, and thermal management is critical for drive-line progression. Research on alternative materials to reduce reliance on rare earth elements in PMSMs ought to be advanced and the use of lightweight materials such as aluminum and composites will improve vehicle efficiency. The development of more efficient and affordable power electronics for all motor types must be prioritized. Combining different motor technologies for optimized performance and efficiency. Efficiency, packaging, and cost-cutting will be the main focuses of e-motor development forward.
Author Contributions
Conceptualization, E.K.; Writing—original draft preparation, E.K.; Writing—review and editing, E.K., M.T., and Y.A.; Supervision, M.T. and Y.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not Applicable.
Data Availability Statement
The article contains the study’s original contributions; further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AHP | Analytical Hierarchical Process |
| BEVs | Battery Electric Vehicles |
| BLDC | Brushless Direct current |
| DC | Direct Current |
| EVs | Electric Vehicles |
| HEVs | Hybrid Electric vehicles |
| IMs | Induction Motors |
| MCDA | Multi-Criteria Decision Analysis |
| PHEVs | Plug-in Hybrid Electric vehicles |
| PM | Permanent Magnate |
| RM | Reluctance Motors |
| SRM | Switched Reluctance Motor |
References
- Rodriguez, A., Santana, T., MacGill, I., Ekins-Daukes, N. and Reinders, A. A feasibility study of solar PV-powered electric cars using an interdisciplinary modeling approach for the electricity balance, CO2 emissions, and economic aspects: The cases of The Netherlands, Norway, Brazil, and Australia. Progress in Photovoltaics: Research and Applications 2019, 28, 517–532. [Google Scholar] [CrossRef]
- Zhi, R., and Luo, W. Impact of Using Electric Vehicles on Carbon Emissions. In Proceedings of the 14th International Conference on Computer Research and Development (ICCRD); 2022; pp. 157–160. [Google Scholar] [CrossRef]
- Kühnbach, M., Stute, J., Gnann, T., Wietschel, M., Marwitz, S. and Klobasa, M. Impact of electric vehicles: Will German households pay less for electricity? Energy Strategy Reviews 2022. [Google Scholar] [CrossRef]
- Yao, L.; Damiran, Z., and Lim, W. Optimal charging and discharging scheduling for electric vehicles in a parking station with photovoltaic system and energy storage system. Energies 2017, 10(4). [Google Scholar] [CrossRef]
- Peter, A.; Mattia, M., and Ole, O. The Nikola Project Intelligent Electric Vehicle Integration. IEEE PES Innovative Smart Grid Technologies, Europe, Istanbul. 2014; 1–6. [Google Scholar] [CrossRef]
- El Hadraoui, H.; Zegrari, M.; Chebak, A.; Laayati, O.; and Guennouni, N. A Multi-Criteria Analysis and Trends of Electric Motors for Electric Vehicles. World Electr. Veh. J. 2022, 13, 65. [Google Scholar] [CrossRef]
- Mohammad, K.S. and Jaber, A.S. Comparison of electric motors used in electric vehicle propulsion system. Indonesia. J. Electr. Eng. Comput. Sci. 2022, 27, 11–19. [Google Scholar]
- S. Kumar, A. Usman, and B. Rajpurohit. Battery charging topology, infrastructure, and standards for electric vehicle applications: A comprehensive review. IET Energy Systems Integration 2021, 3, 381–396. [Google Scholar] [CrossRef]
- Kumar, S. and Usman, A. A review of converter topologies for battery charging applications in plug-in hybrid electric vehicles. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, 23–27 September 2018; IEEE, 23–27 September. [Google Scholar] [CrossRef]
- Chung, S. and Trescases, O. Power-mix control in a dual-chemistry battery pack for light electric vehicles. IEEE Trans. Transp. Electrific. 2017, 3(3), 600–617. [Google Scholar] [CrossRef]
- Kuperman, A., et al. Battery charger for electric vehicle traction battery switch station. IEEE Trans. Ind. Electron. 2013, 60(12), 5391–5399. [Google Scholar] [CrossRef]
- Pinto, J.G.; et al. Onboard reconfigurable battery charger for electric vehicles with traction-to-auxiliary mode. IEEE Trans. Veh. Technology 2023. [Google Scholar] [CrossRef]
- El Hadraoui, H.; Zegrari, M.; Chebak, A.; Laayati, O. and Guennouni, N. A Multi-Criteria Analysis and Trends of Electric Motors for Electric Vehicles. World Electr. Veh. J. 2022, 13, 65. [Google Scholar] [CrossRef]
- E. A. Grunditz and T. Thiringer. Performance Analysis of Current BEVs Based on a Comprehensive Review of Specifications. IEEE Trans. Transp. Electrif. 2016, 2(3), 270–289. [Google Scholar] [CrossRef]
- W. Cao, A. Bukhari, and L. Aarniovuori. Review of Electrical Motor Drives for Electric Vehicle Applications, July 2019, Jul. 2019. [CrossRef]
- Rimpas, D.; Kaminaris, S.D.; Piromalis, D.D.; Vokas, G.; Arvanitis, K.G. and Karavas, C.S. Comparative Review of Motor Technologies for Electric Vehicles Powered by a Hybrid Energy Storage System Based on Multi-Criteria Analysis. Energies 2023, 16, 2555. [Google Scholar] [CrossRef]
- S. De Pinto et al. On the Comparison of 2- and 4-Wheel-Drive Electric Vehicle Layouts with Central Motors and Single- and 2-Speed Transmission Systems. Energies 2020. [Google Scholar] [CrossRef]
- Cai Chi-lan, Wang Xiao-gang, Bai Yue-wei, Xia Yan-Chun, and Liu Kai. Key technologies of the design of electric vehicle motor drive systems. Procedia Engineering 2011, 16, 356–362. [Google Scholar] [CrossRef]
- K. Takayama, Y. Takasaki, R. Ueda, T. Sonoda, and T. Iwakane. A new type switched reluctance motor. Conference Record of the 1988 IEEE Industry Applications Society Annual Meeting; 2018; pp. 71–78. [Google Scholar] [CrossRef]
- Zhenyao Xu, Tao Li, Feng Zhang, Yue Zhang, Dong-Hee Lee, and Jin-Woo Ahn. A Review on Segmented Switched Reluctance Motors. Energies 2022. [Google Scholar] [CrossRef]
- Ashok P. and Tesar D. Computer-Aided Design of Switched Reluctance Motors for Use in Robotic Actuators. 2006 World Automation Congress, July 2006; pp. 1–7. [Google Scholar] [CrossRef]
- Jingwen T., Hao Wu, and Meijuan G. Control System for Switched Reluctance Motor Based on Embedded System. 2008 International Conference on Embedded Software and Systems Symposia, Jul. 2008; pp. 404–409. [Google Scholar] [CrossRef]
- Murata, S. Innovation by in-wheel-motor drive unit. Vehicle System Dynamics 2012, 50, 807–830. [Google Scholar] [CrossRef]
- Husain, I.; et al. Electric Drive Technology Trends, Challenges, and Opportunities for Future Electric Vehicles. Proceedings of the IEEE 1039, 109, 1039–1059. [Google Scholar] [CrossRef]
- Wang W., Cheng Lin, Wanke Cao, and Chen J. Design of a New Dual-Motor Independent Drive System for Electric Vehicle. Advanced Materials Research 2012, 591–593, 251–258. [Google Scholar] [CrossRef]
- El Hadraoui, H.; Zegrari, M.; Chebak, A.; Laayati, O.; and Guennouni, N. A Multi-Criteria Analysis and Trends of Electric Motors for Electric Vehicles. World Electr. Veh. J. 2022, 13, 65. [Google Scholar] [CrossRef]
- Grunditz, E.A.; Thiringer, T. Performance Analysis of Current BEVs Based on a Comprehensive Review of Specifications. IEEE Trans. Transp. Electrification 2016, 2, 270–289. [Google Scholar] [CrossRef]
- Gao, D.; Wang, Y.; Zheng, X.; Yang, Q. A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network. World Electr. Veh. J. 2021, 12, 265. [Google Scholar] [CrossRef]
- What Is MCDM/MCDA? Available online: https://www.1000minds.com/decision-making/what-is-mcdm-mcda (accessed on 19 January 2024).
- Chakraborty, S. TOPSIS and Modified TOPSIS: A Comparative Analysis. Decis. Anal. J. 2022, 2, 100021. [Google Scholar] [CrossRef]
- Kahraman, C.; Onar, S.Ç.; Öztay¸ and si, B. Fuzzy Decision Making: Its Pioneers and Supportive Environment. In Fuzzy Logic in Its 50th Year: New Developments, Directions and Challenges; Studies in Fuzziness and Soft, Computing, Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 21–58. ISBN 978-3-319-31093-0. [Google Scholar]
- Zheng, G.; Zhu, N.; Tian, Z.; Chen, Y.; Sun, B. Application of a trapezoidal fuzzy AHP method for work safety evaluation and early warning rating of hot and humid environments. Saf. Sci. 2012, 50, 228–239. [Google Scholar] [CrossRef]
- Roy, J.; Chatterjee, K.; Bandyopadhyay, A.; Kar, S. Evaluation and selection of medical tourism sites: A rough analytic hierarchy process based multi-attributive border approximation area comparison approach. Expert Syst. 2018, 35, e12232. [Google Scholar] [CrossRef]
- Baidya, R.; Dey, P.K.; Ghosh, S.K.; Petridis, K. Strategic maintenance technique selection using combined quality function deployment, the analytic hierarchy process and the benefit of doubt approach. Int. J. Adv. Manuf. Technol. 2018, 94, 31–44. [Google Scholar] [CrossRef]
- Nazari, S.; Fallah, M.; Kazemipoor, H.; Salehipour, A. A fuzzy inference-fuzzy analytic hierarchy process-based clinical decision support system for diagnosis of heart diseases. Expert Syst. Appl. 2018, 95, 261–271. [Google Scholar] [CrossRef]
- Tseng, P.H.; Cullinane, K. Key criteria influencing the choice of Arctic shipping: A fuzzy analytic hierarchy process model. Marit. Policy Manag. 2018, 45, 422–438. [Google Scholar] [CrossRef]
- Teixeira, Z.; Marques, C.; Mota, J.S.; Garcia, A.C. Identification of potential aquaculture sites in solar saltscapes via the Analytic Hierarchy Process. Ecol. Indic. 2018, 93, 231–242. [Google Scholar] [CrossRef]
- Wu, C.; Liu, G.; Huang, C.; Liu, Q.; Guan, X. Ecological Vulnerability Assessment Based on Fuzzy Analytical Method and Analytic Hierarchy Process in Yellow River Delta. Int. J. Environ. Res. Public Health 2018, 15, 855. [Google Scholar] [CrossRef]
- Jing, M.; Jie, Y.; Shou-yi, L.; Lu, W. Application of fuzzy analytic hierarchy process in the risk assessment of dangerous small-sized reservoirs. Int. J. Mach. Learn. Cybern. 2018, 9, 113–123. [Google Scholar] [CrossRef]
- Chang, Y.; Yang, Y.; Dong, S. Comprehensive sustainability evaluation of high-speed railway (HSR) construction projects based on unascertained measure and analytic hierarchy process. Sustainability 2018, 10, 408. [Google Scholar] [CrossRef]
- Ali, Y.; Butt, M.; Sabir, M.; Mumtaz, U.; Salman, A. Selection of a suitable site in Pakistan for wind power plant installation using analytic hierarchy process (AHP). J. Control Decis. 2018, 5, 117–128. [Google Scholar] [CrossRef]
- Hamurcu, M.; Alakaş, H.M.; Eren, T. Selection of rail system projects with analytic hierarchy process and goal programming. Sigma J. Eng. Nat. Sci. 2017, 8, 291–302 [Google Scholar]. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Bolvashenkov, I.; Kammermann, J.; Herzog, H.-G. Methodology for selecting electric traction motors and its application to vehicle propulsion systems. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation, and Motion (SPEEDAM), Capri, Italy, 22–24 June 2016; pp. 1214–1219. [Google Scholar]
- Karki, A.; Phuyal, S.; Tuladhar, D.; Basnet, S.; Shrestha, B.P. Status of Pure Electric Vehicle Power Train Technology and Future Prospects. Appl. Syst. Innov. 2020, 3, 35. [Google Scholar] [CrossRef]
- López, I.; Ibarra, E.; Matallana, A.; Andreu, J.; Kortabarria, I. Next generation electric drives for HEV/EV propulsion systems: Technology, trends and challenges. Renew. Sustain. Energy Rev. 2019, 114, 109336. [Google Scholar] [CrossRef]
- Roshandel, E.; Mahmoudi, A.; Kahourzade, S.; Tahir, A.; Fernando, N. Propulsion System of Electric Vehicles: Review. In Proceedings of the 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 26–30 September 2021. [Google Scholar]
- Dinç, S.; Hamurcu, M.; Eren, T. Multicriteria Selection of Alternative Tramway Vehicles for Urban Transportation. Gazi J. Eng. Sci. 2018, 4, 124–135. [Google Scholar] [CrossRef]
- Dhull, S.; Narwal, M.S. Prioritizing the Drivers of Green Supply Chain Management in Indian Manufacturing Industries Using Fuzzy TOPSIS Method: Government, Industry, Environment, and Public Perspectives. Process Integr. Optim. Sustain. 2018, 2, 47–60. [Google Scholar] [CrossRef]
- S. Krishnamoorthy and P. P Panikka. A comprehensive review of different electric motors for electric vehicles application. International Journal of Power Electronics and Drive Systems (IJPEDS) 2024, 15, 74–90. [Google Scholar] [CrossRef]
- Yildirim, M., Polat, M., and Kurum, H. A survey on comparison of electric motor types and drives used for electric vehicles. 2014 16th International Power Electronics and Motion Control Conference and Exposition; 2014; pp. 218-–223. [Google Scholar] [CrossRef]
- Ranjan, A., Giribabu, D., and Kakodia, S. Energy Management System and Electric Motors of Electric Vehicles: A Review. 2022 IEEE International Conference on Current Development in Engineering and Technology (CCET); 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ramadhan, M., Asfani, D., Negara, I., and Nugraha, Y. Performance Comparison of BLDC and SRM on Electric Motorcycl. 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE); 2021; pp. 78–83. [Google Scholar] [CrossRef]
- Pindoriya, R., Rajpurohit, B., Kumar, R. and Srivastava, K. Comparative analysis of permanent magnet motors and switched reluctance motors capabilities for electric and hybrid electric vehicles. 2018 IEEMA Engineer Infinite Conference (eTechNxT); 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Cao, W., Bukhari, A., and Aarniovuori, L. Review of Electrical Motor Drives for Electric Vehicle Applications. July 2019. 2019. [Google Scholar] [CrossRef]
- Wang, Z., Ching, T., Huang, S., Wang, H., and Xu, T. Challenges Faced by Electric Vehicle Motors and Their Solutions. IEEE Access 2021, 9, 5228–5249. [Google Scholar] [CrossRef]
- Wang, Z., Ching, T., Huang, S., Wang, H., and Xu, T. Challenges Faced by Electric Vehicle Motors and Their Solutions. IEEE Access 2021, 9, 5228–5249. [Google Scholar] [CrossRef]
- Jeong, Y., Jeon, Y., Kang, J., and Kim, J. Design of a Switched Reluctance Motor Driving an Electric Compressor for HEVs. 2013. [Google Scholar] [CrossRef]
- Ahmed, H., Zaidi, C., and Khan, D. A Comparative Study On Different Motors Used In Electric Vehicles. Journal of Independent Studies and Research Computing 2022. [Google Scholar] [CrossRef]
- Nikam, S., Rallabandi, V., and Fernandes, B. A High-Torque-Density Permanent-Magnet Free Motor for in-wheel Electric Vehicle Application. IEEE Transactions on Industry Applications 2012, 48, 2287-–2295. [Google Scholar] [CrossRef]
- Pindoriya, R., Rajpurohit, B., Kumar, R., and Srivastava, K. Comparative analysis of permanent magnet motors and switched reluctance motors capabilities for electric and hybrid electric vehicles. 2018 IEEMA Engineer Infinite Conference (eTechNxT); 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Rothe, R.; Hameyer, K. Life Expectancy Calculation for Electric Vehicle Traction Motors Regarding Dynamic Temperature and Driving Cycles. In Proceedings of the 2011 IEEE International Electric Machines Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1306–1309. [Google Scholar]
- Wu, Jinglai, et al. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mechanism and Machine Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Ramadhan, M., Asfani, D., Negara, I. and Nugraha, Y. Performance Comparison of BLDC and SRM on Electric Motorcycle. 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE); 2021; pp. 78–83. [Google Scholar] [CrossRef]
- Ranjan, A., Giribabu, D. and Kakodia, S. Energy Management System and Electric Motors of Electric Vehicles: A Review. 2022 IEEE International Conference on Current Development in Engineering and Technology (CCET); 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, M., Domingues-Olavarría, G., and Alaküla, M. Comparison of PMSM versus PMa-SynRM and IM from an Optimized Electric Vehicle Powertrain Perspective. 2023 26th International Conference on Electrical Machines and Systems (ICEMS); 2023; pp. 4075–4080. [Google Scholar] [CrossRef]
- Zhao, W., Wang, X., Gerada, C., Zhang, H., Liu, C., and Wang, Y. Multi-Physics and Multi-Objective Optimization of a High-Speed PMSM for High-Performance Applications. IEEE Transactions on Magnetics 2018, 54, 1–5. [Google Scholar] [CrossRef]
Figure 1.
Electric Vehicle classifications.
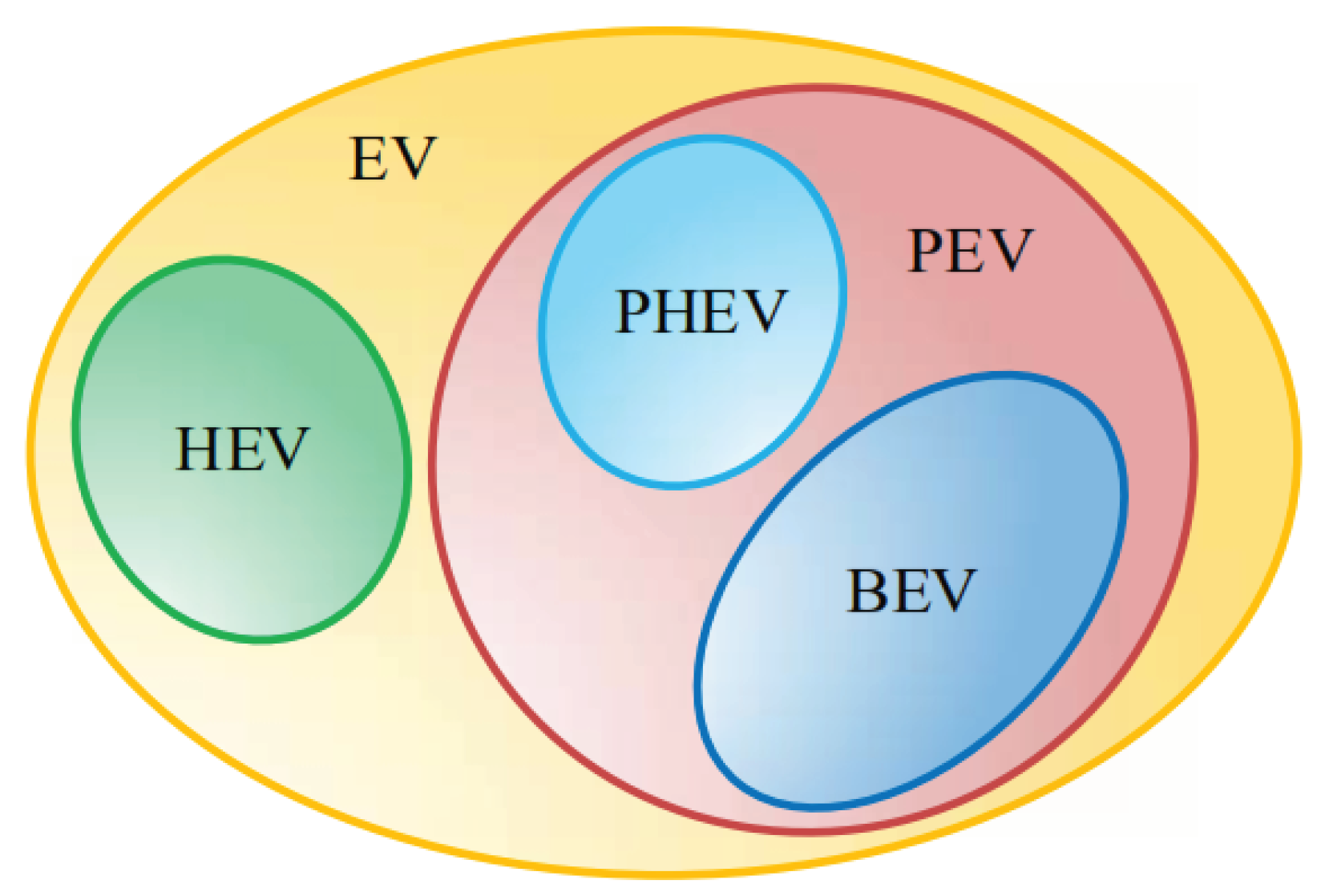
Figure 2.
Block diagram of electric vehicle [8].
Figure 2.
Block diagram of electric vehicle [8].
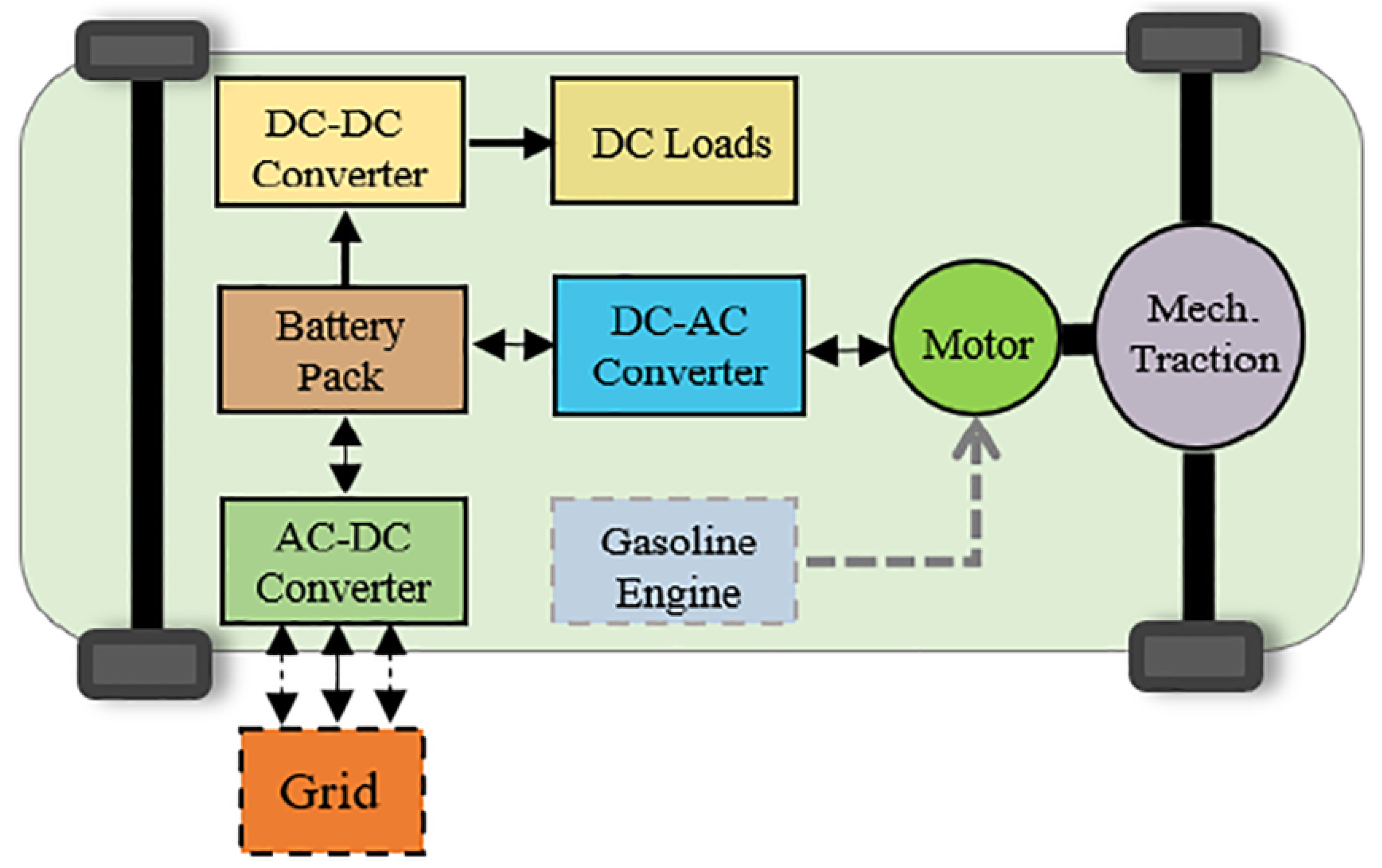
Figure 3.
Electric Vehicle Motor Technologies.
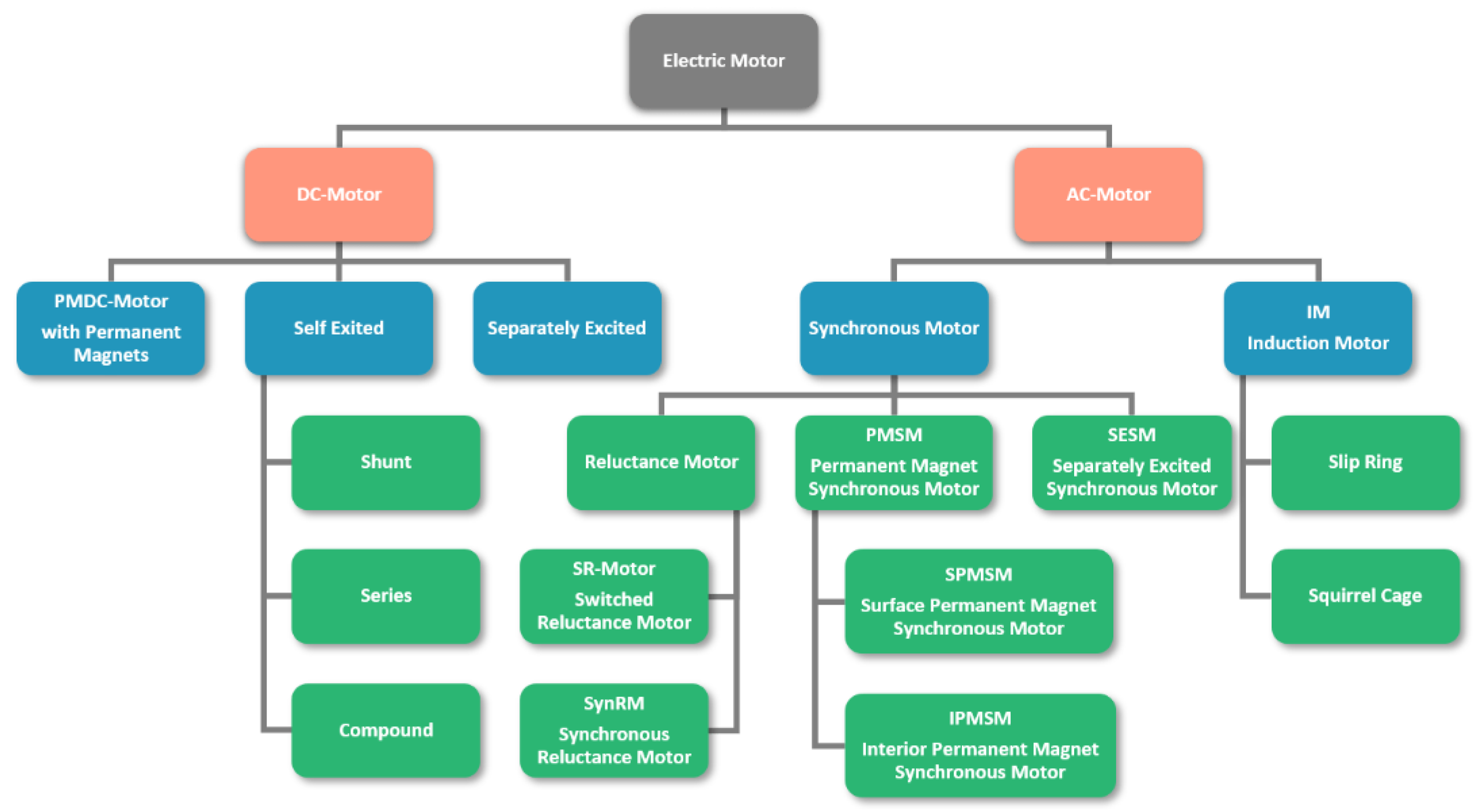
Figure 4.
Induction Motor characteristics [14].
Figure 4.
Induction Motor characteristics [14].
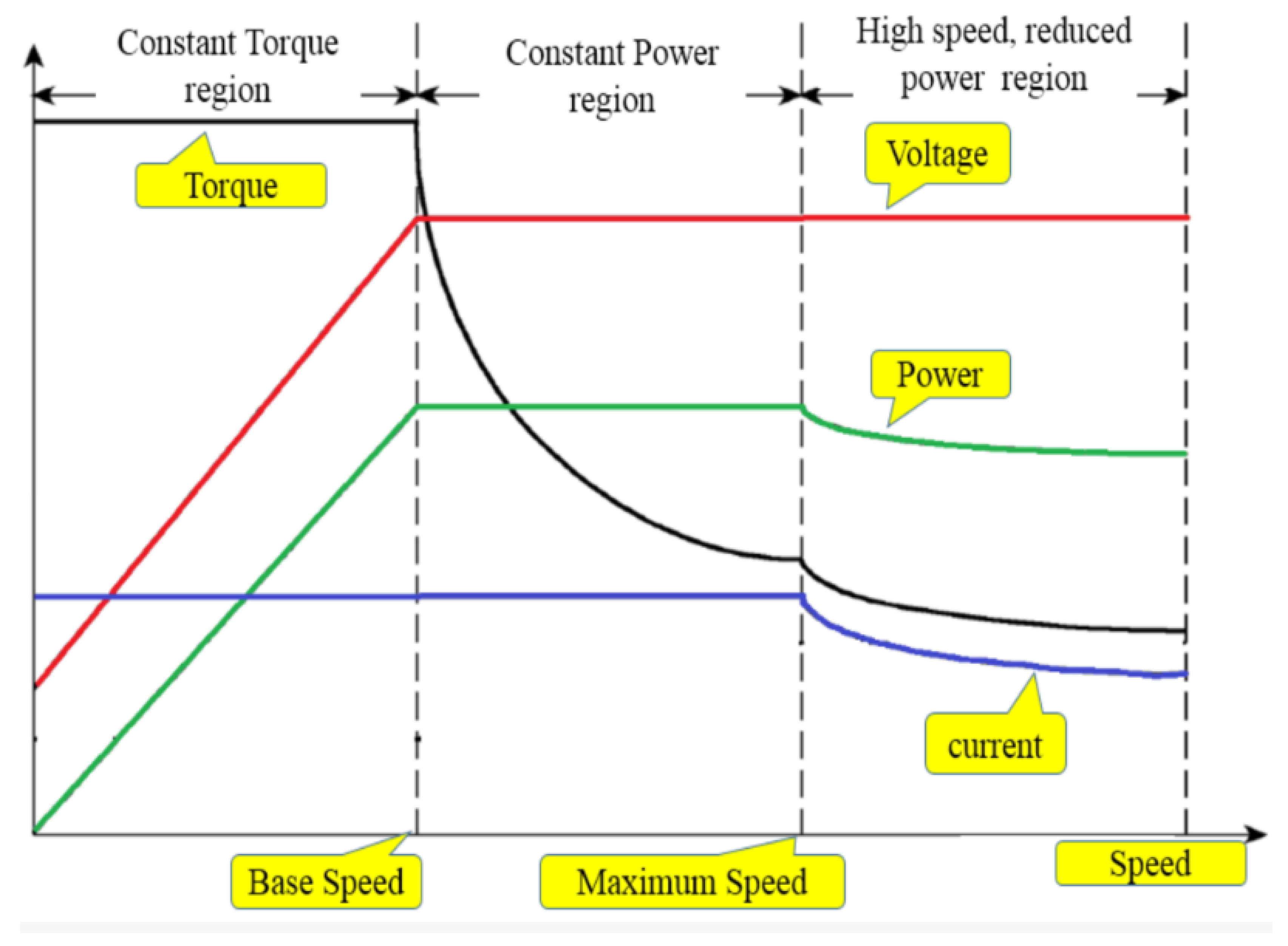
Figure 5.
Multi-criteria Analysis using AHP methodology.
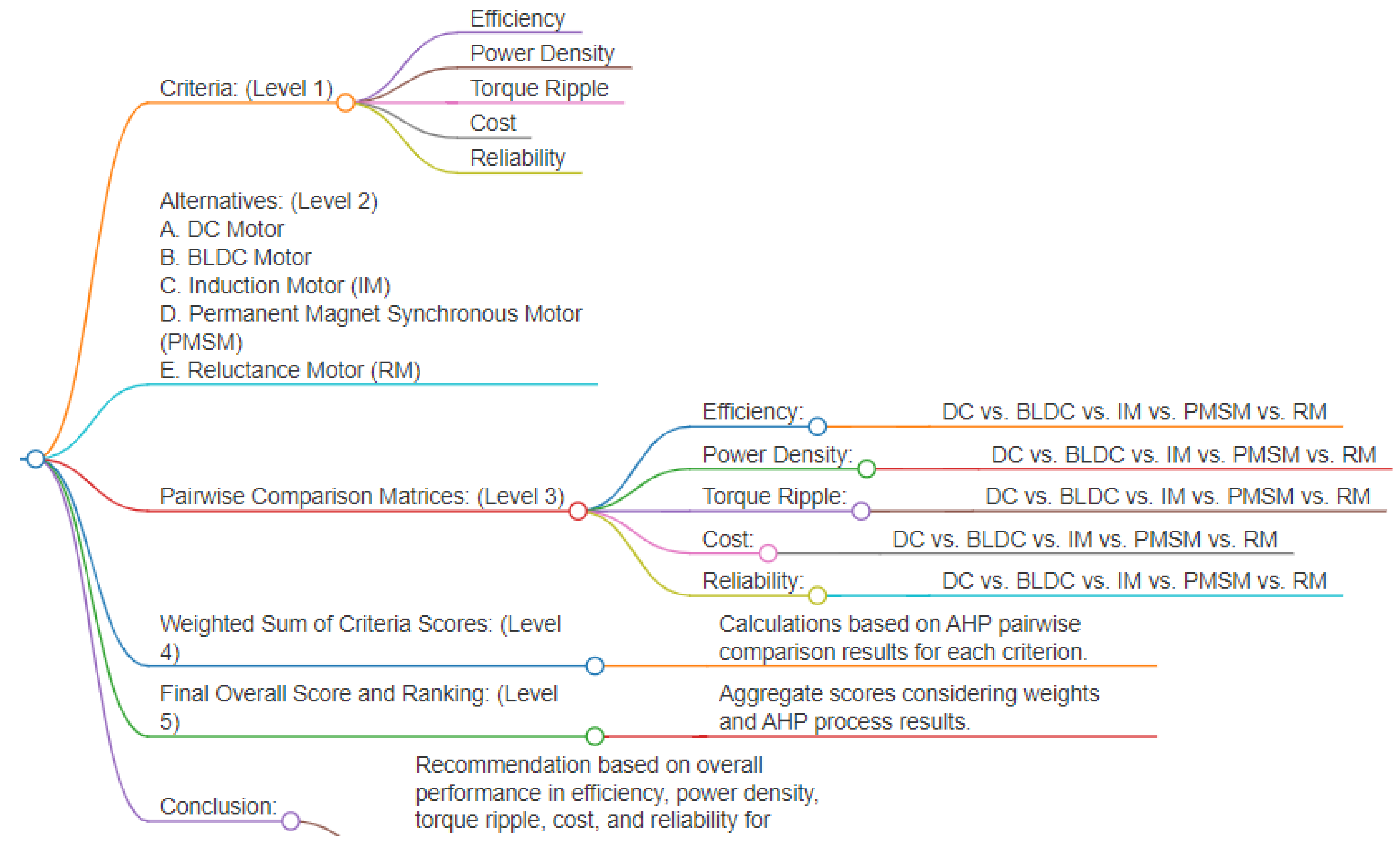
Figure 6.
Efficiency of Electric Vehicle motors.
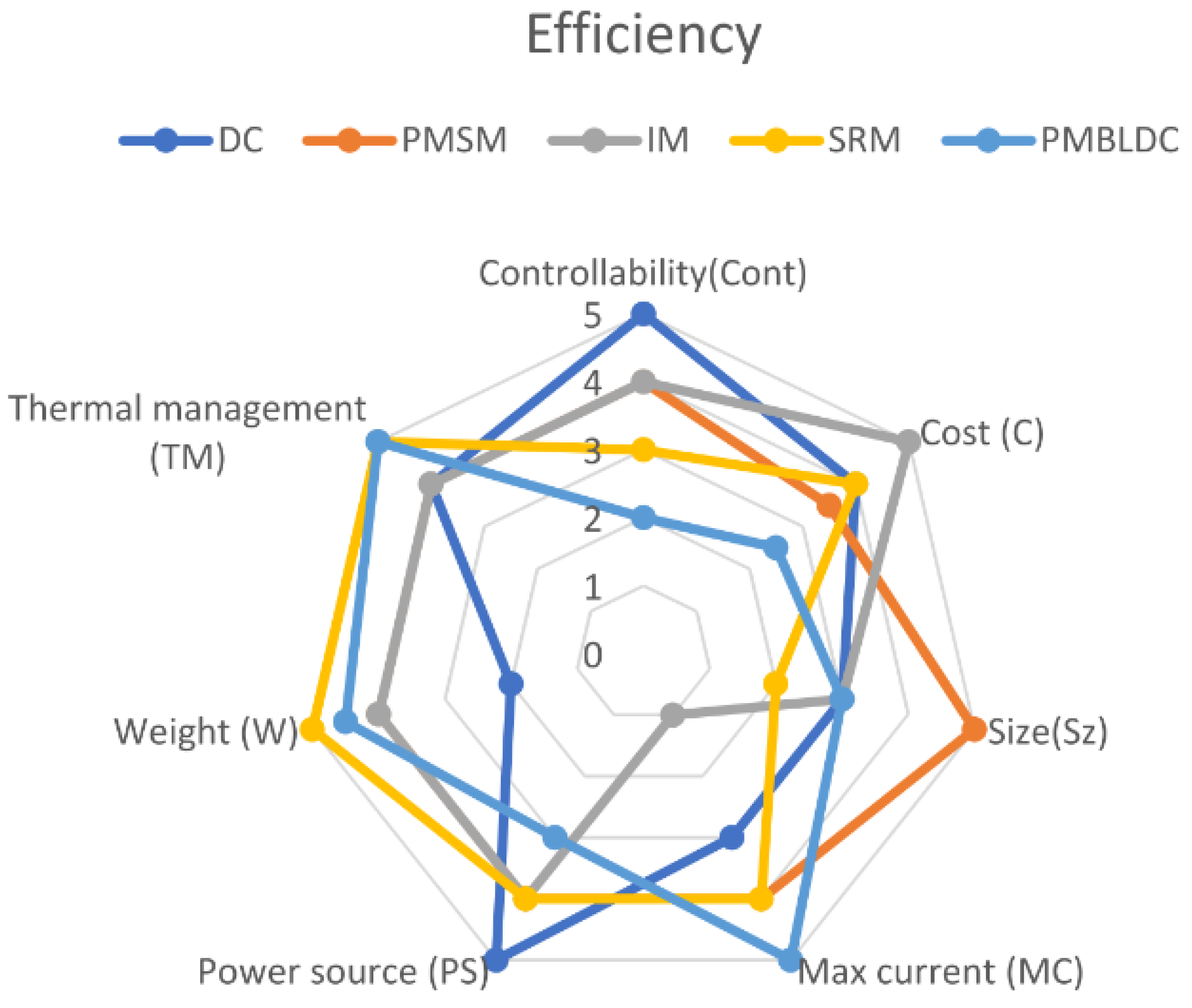
Figure 7.
Relationship between power density and DC, IM, PMS, BLDC, and SRM Motors.
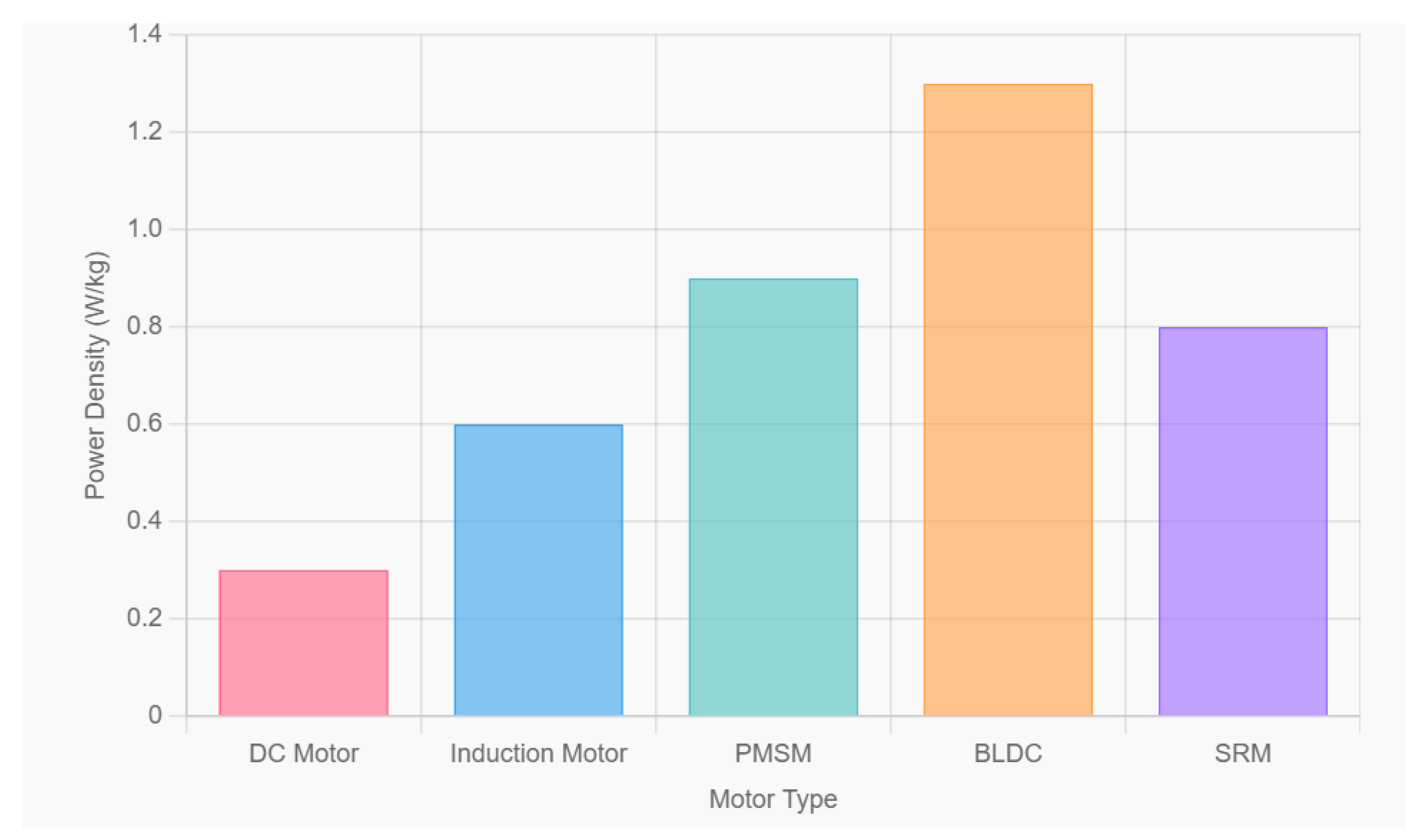
Figure 8.
Performance evaluation of the motors under study in terms of power, speed, and control.
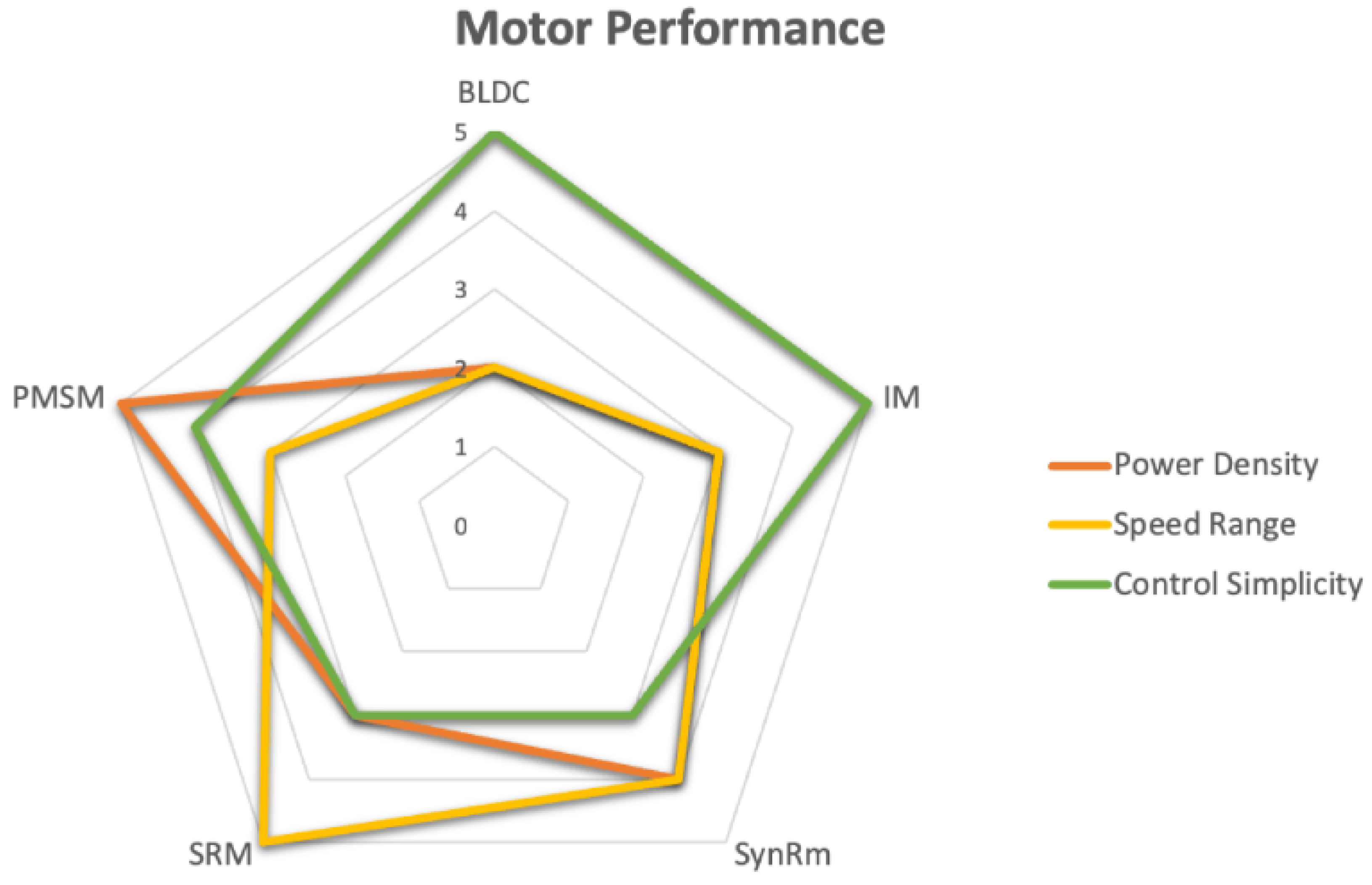
Figure 9.
Electric Vehicle Motors performance comparison.
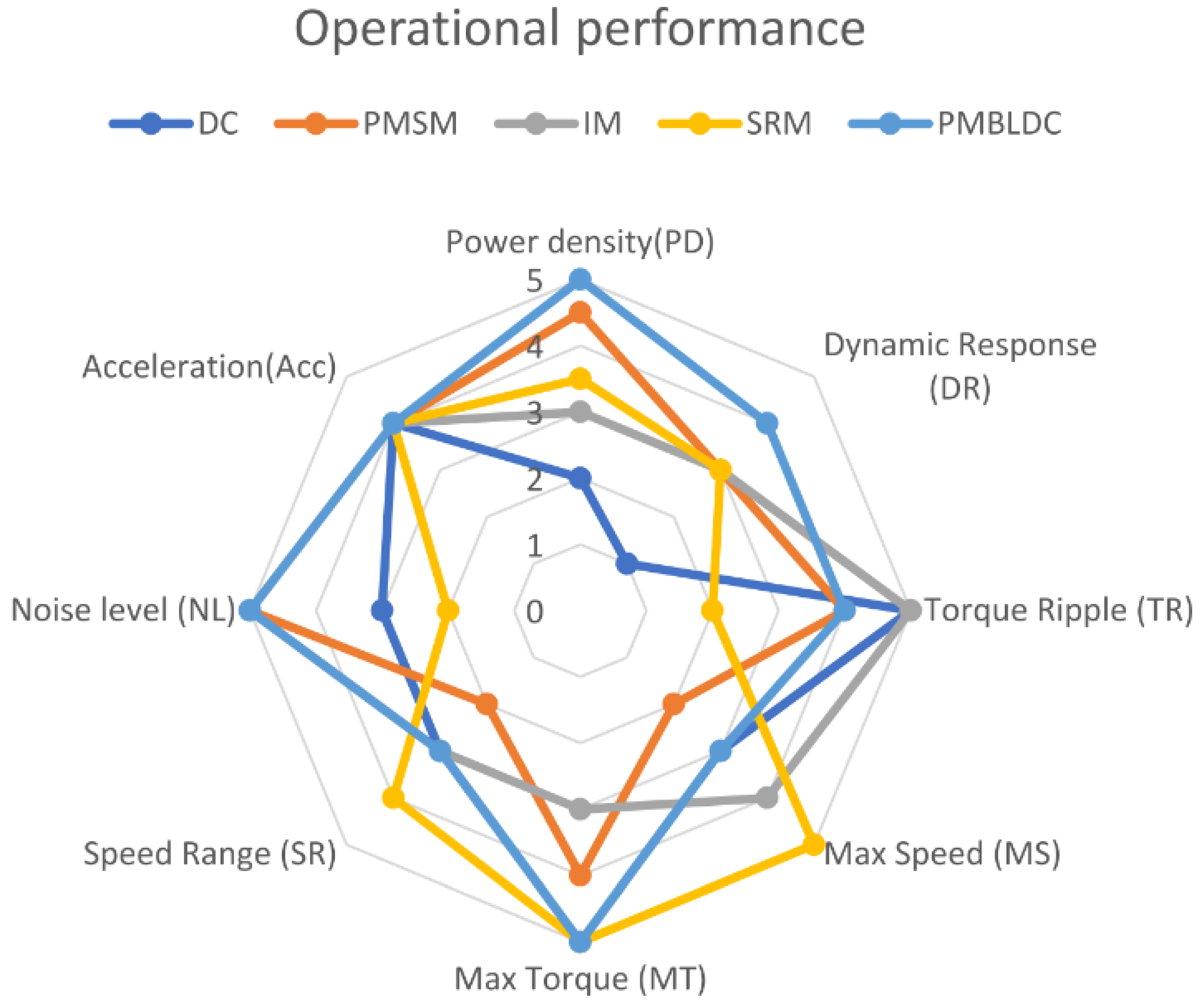
Figure 10.
Cost comparison of Electric vehicle Motor Technologies.
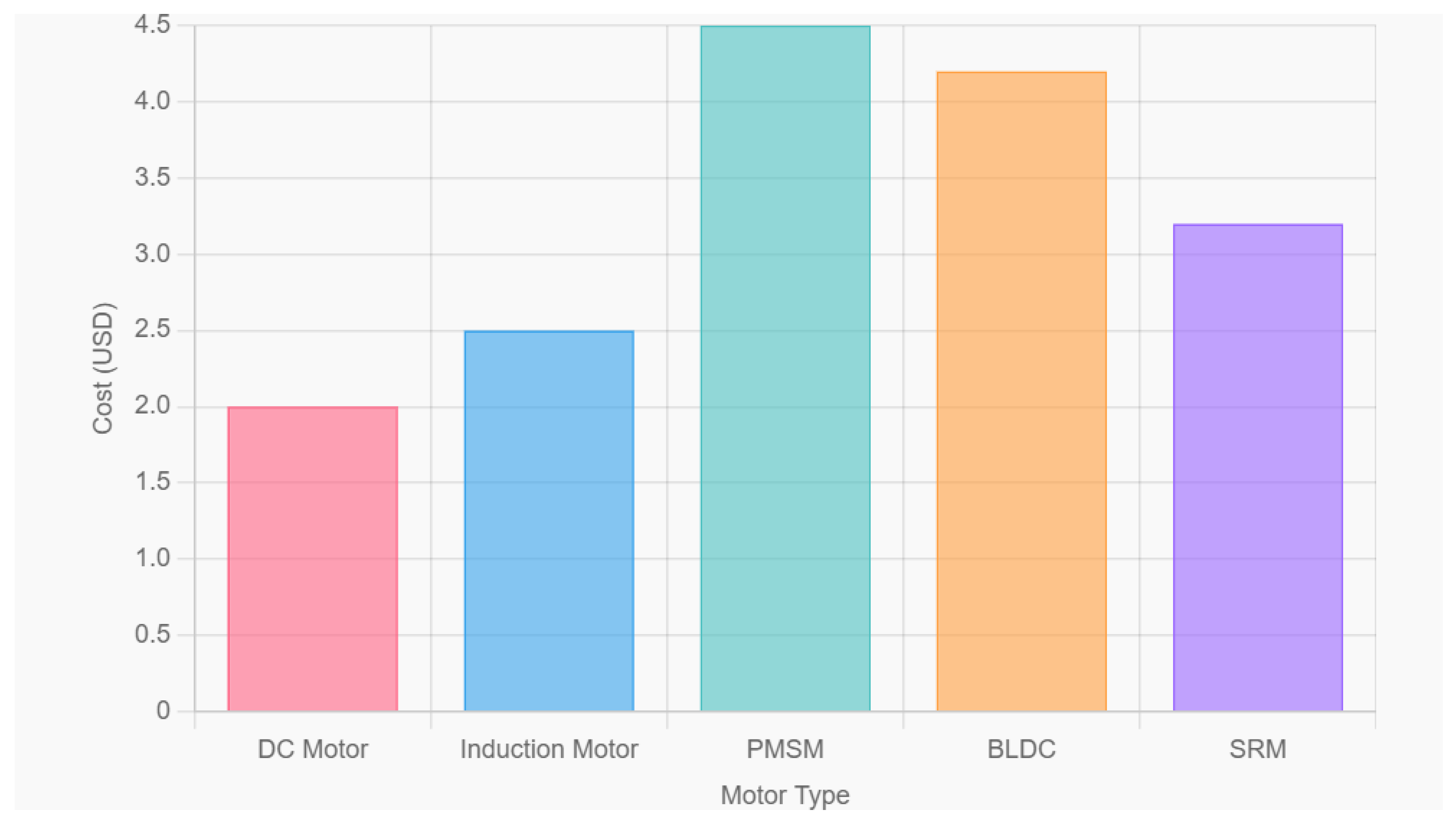
Figure 11.
Cost-Size Comparison of Electric Vehicle Motor Technologies
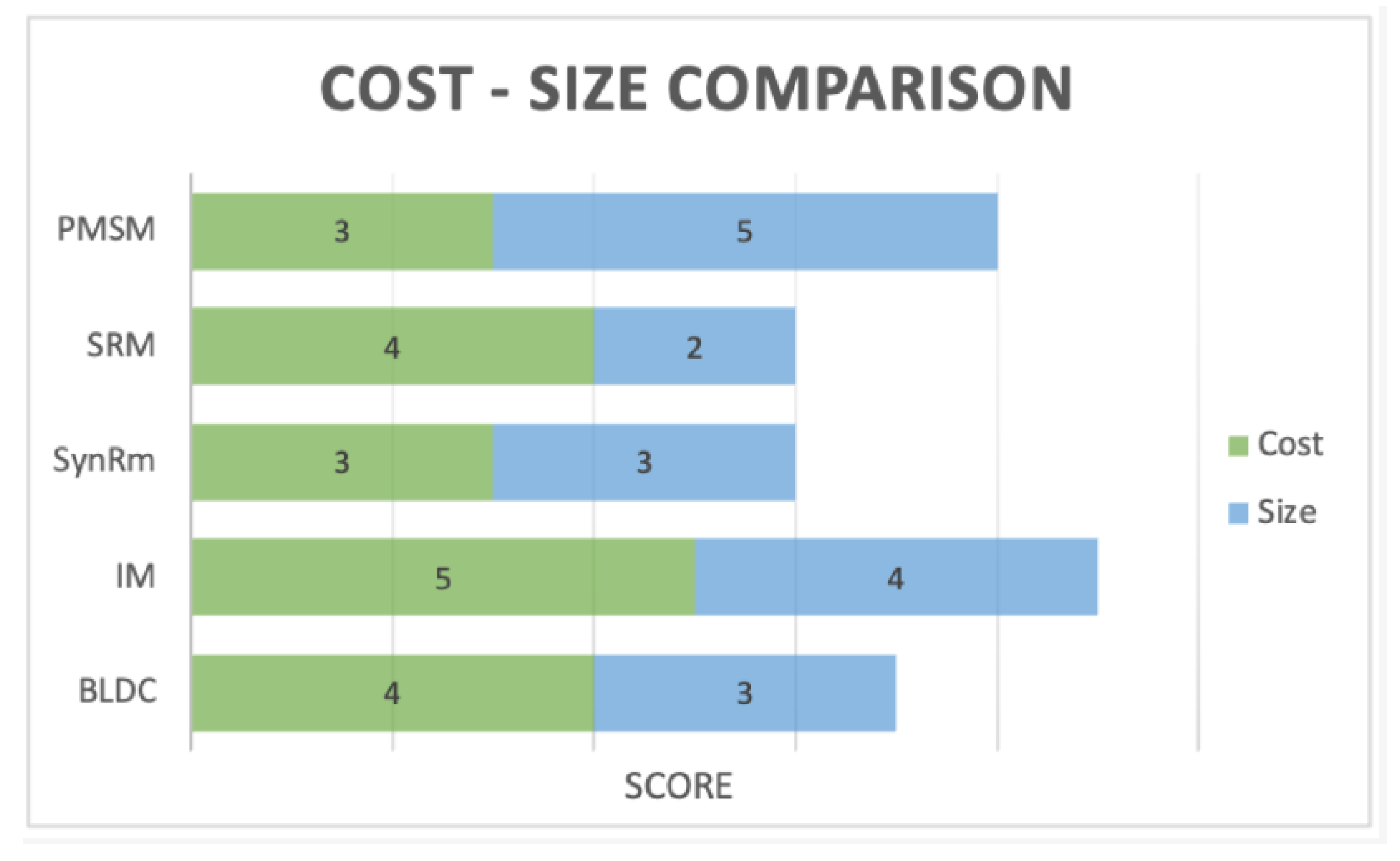
Figure 12.
Variables related to the dependability of electric motors in electric vehicles.
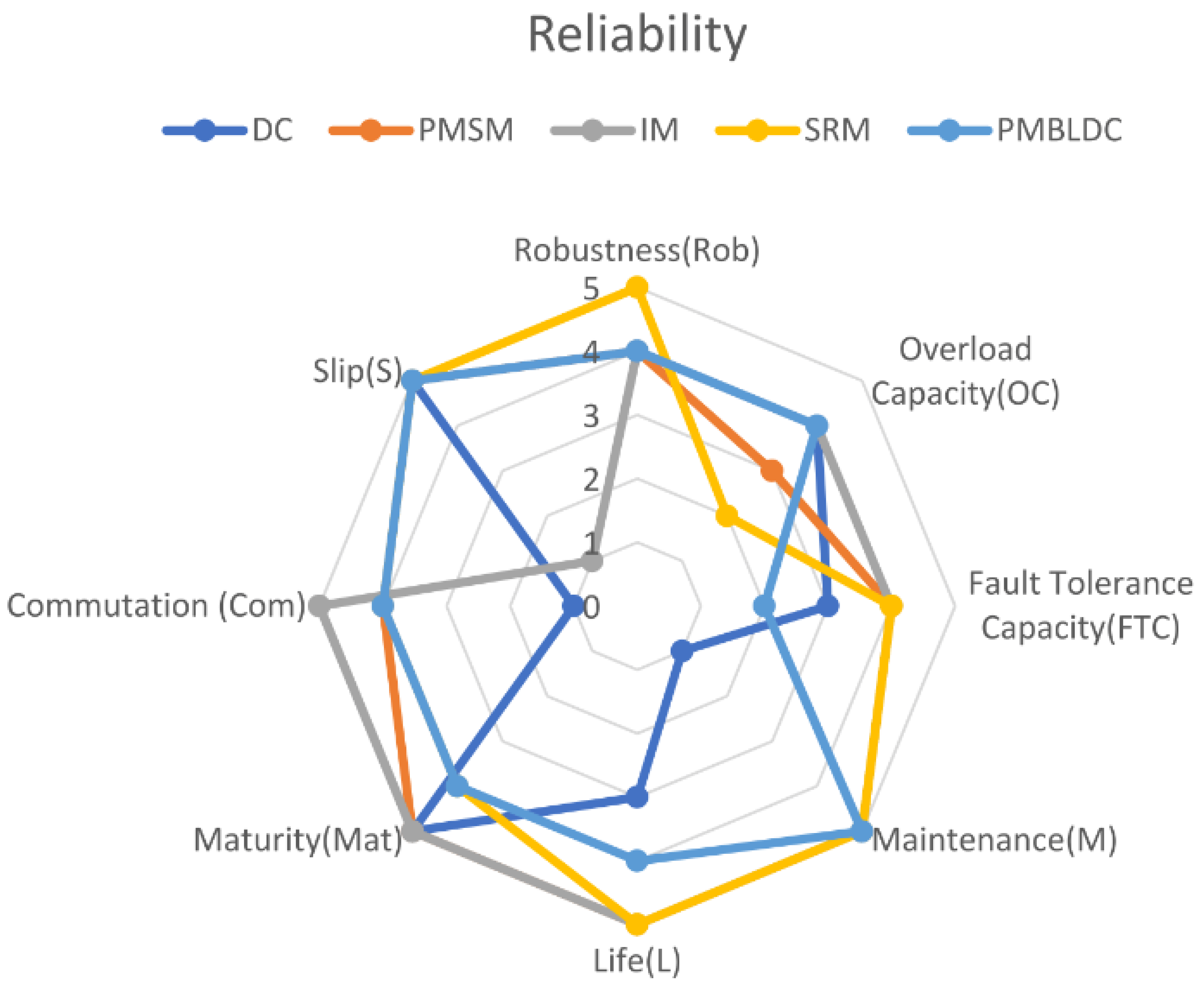
Figure 13.
Reliability of Electric vehicle motor technologies.
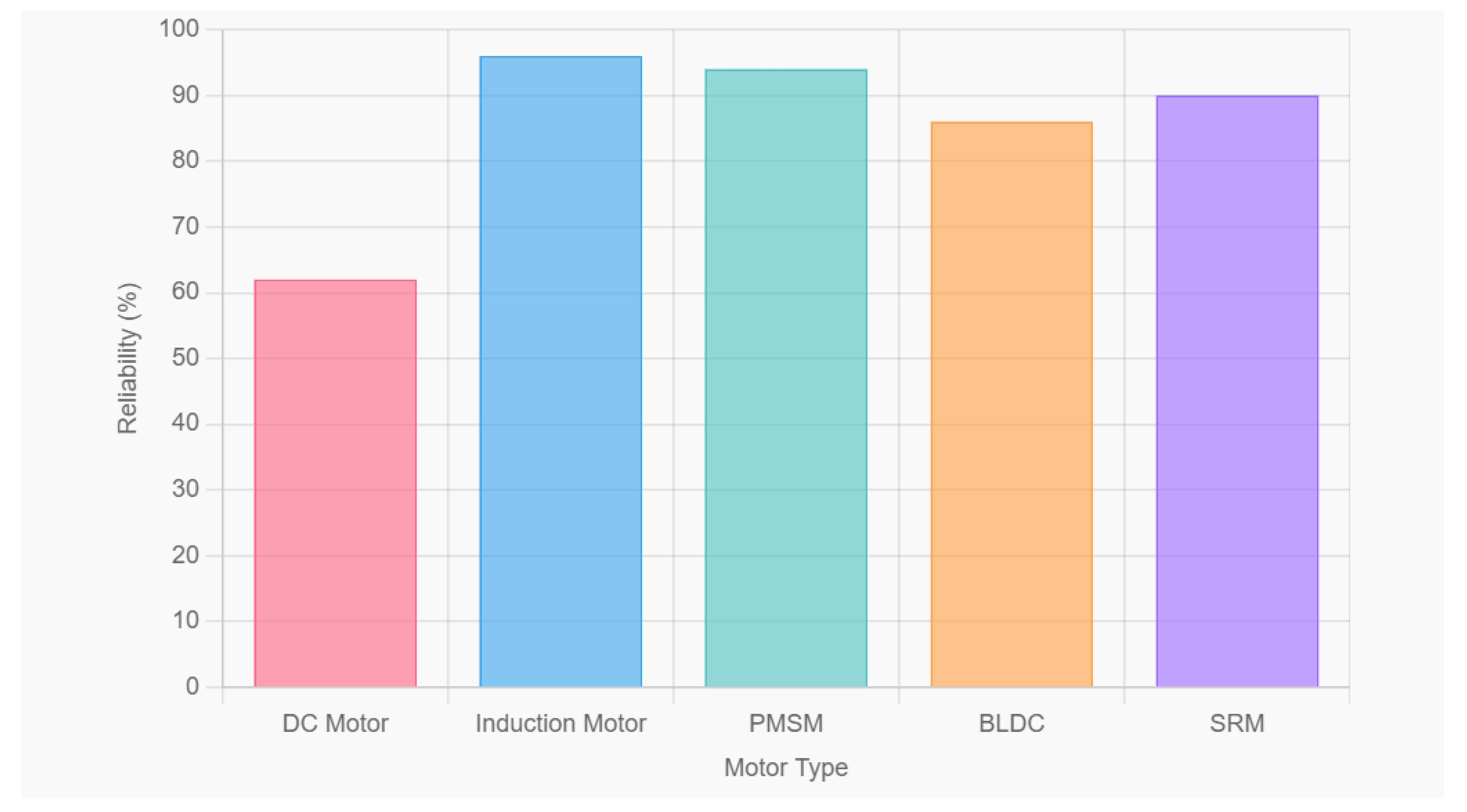
Figure 14.
Global Average of Electric Vehicle Motor Technologies.
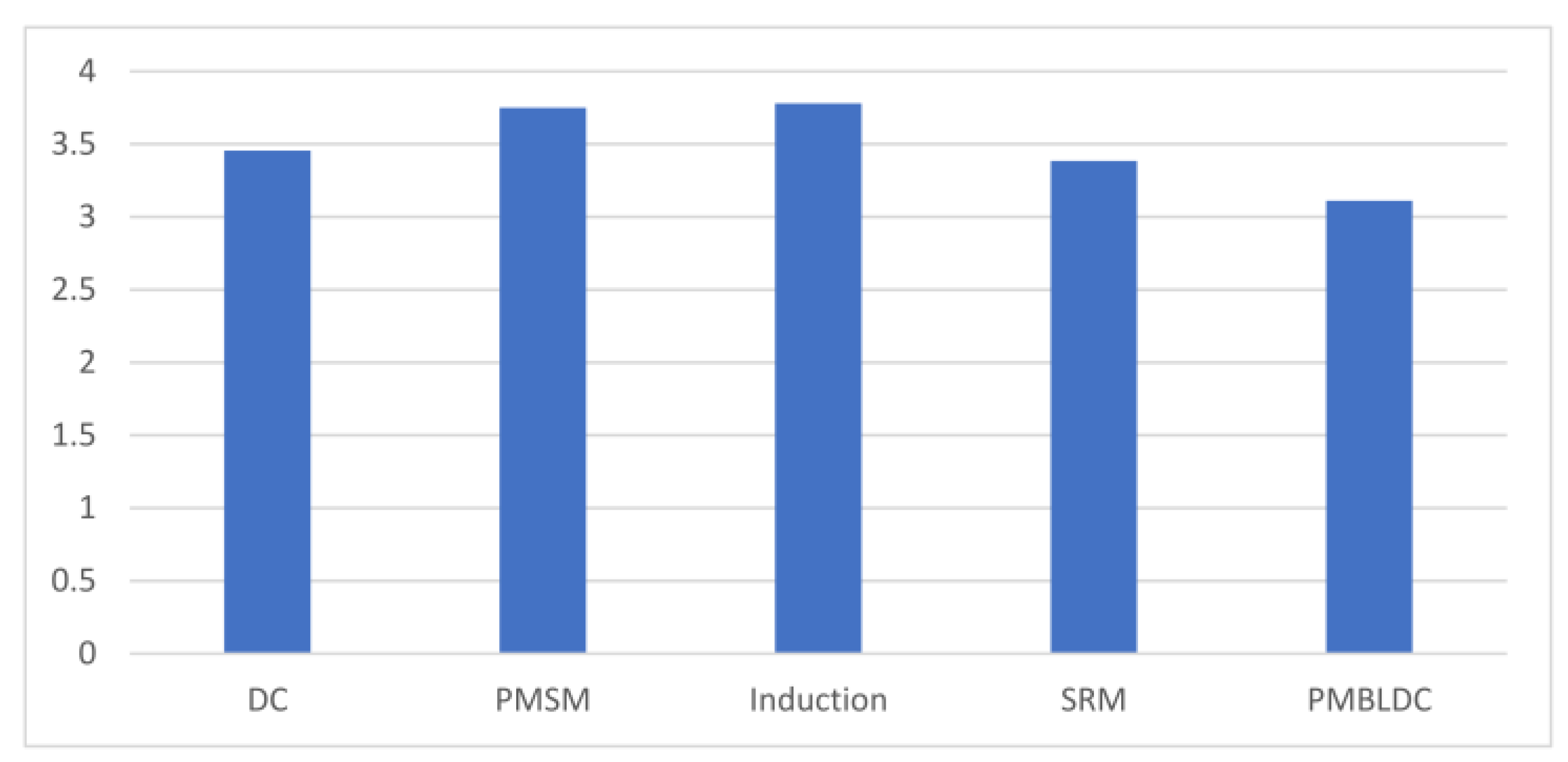

Table 1.
Appropriateness of motor technologies for EVs based on multi-criteria indices [63,64,65,66,67].
| Criteria | PMSM | IM | SRM | BLDC | DC |
|---|---|---|---|---|---|
| Efficiency | High | Medium | Medium | High | High |
| Power Density | High | Low | Medium | Medium | Medium |
| Cost | High | Low | Low | Medium | Medium |
| Torque Control | Excellent | Good | Good | Good | Good |
| Reliability | High | High | High | Medium | High |
| Noise Level | Low | Low | High | Medium | Low |
| Maintenance | Low | Low | Low | Low | Low |
| Weight | Light | Heavy | Medium | Medium | Light |
| Availability of Rare Earth Materials | Limited | N/A | N/A | N/A | N/A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



