
Submitted:
31 October 2024
Posted:
01 November 2024
You are already at the latest version
Abstract
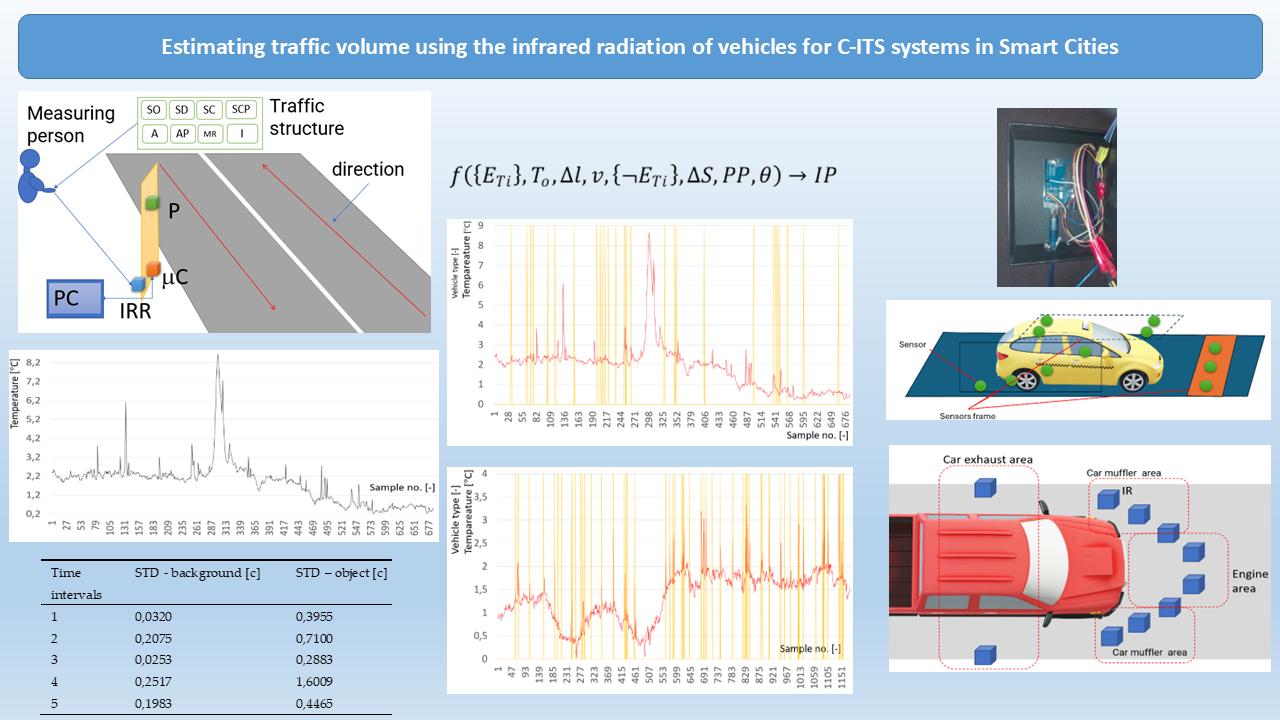
One of the foundations of Smart Cities is mobility. To manage the efficiency of urban mobility, continuous recording of traffic flows is essential. The road traffic parameters in the cross section of the road network can be registered with the use of various measurement technologies. This is indirectly due to the complexity of the phenomenon of vehicle traffic and the disturbances in physical quantities generated as a result of it. Traffic data carries: sound waves, vibrations, optical waves and other media. The characteristics of these physical media, properly recorded and mathematically transformed, may constitute a superposition of the position of individual vehicles moving in the traffic flow. Moreover, these waves interfere with each other depending on the observed parameters of the movement of individual vehicles at different places of the network. In this context, information obtained from various media is the overall view of traffic. This article focuses on acquiring infrared traffic data. The movement of each vehicle, regardless of its type, is inextricably linked to infrared radiation, the distribution changing as a function of the road network. Each vehicle is a source of heat and therefore also emits infrared radiation (it heats up gradually while driving, with small temperature fluctuations). Therefore, the temperature of a moving vehicle is generally different from the background (road network) temperature. This article presents a successful attempt to analyze the infrared radiation accompanying road traffic in a selected cross section of the road. In order to register infrared radiation in the traffic stream, a prototype of a measuring system consisting of a pyrometer commonly used in thermometers (cost about 10 € and less) was used. Measurements of infrared radiation of the vehicle stream obtained in this way were compared with the measurement data of handheld traffic recorders, the so-called mechanical vehicle counters. The comparison of the results from both recording methods allows for the formulation of further research hypotheses towards extended research in the field of infrared radiation of the traffic stream. In this regard, it is important to research with various disturbances in the measurements that come from other heat sources located in the road network and its immediate vicinity. This study is important from the point of view of smart cities and C-ITS systems (mainly V2I communication). The registration of data describing the traffic flow with the use of a single pyrometer, instead of an expensive IR camera, is a cheap alternative in modern city information networks. This allows you to create intelligent sensor networks using connectivity based on, e.g., mesh networks. Such activities are possible with costs for one measuring point reduced by one or two orders of magnitude compared to the costs incurred with the use of IR cameras ( € 1000, € 10,000 and more). In the current situation of the energy crisis, the search for innovative solutions with lower energy demand is very important in the Smart City policy.
Keywords:
road traffic parameters
; infrared radiation
; smart cities
; C-ITS
; innovation technology
1. Introduction
The movement of every vehicle is inextricably linked with the presence of infrared radiation, the distribution of which changes in the space of the road network. The vehicle’s engine warms up over the distance traveled. Each vehicle is therefore a source of heat, although its magnitude depends on a large number of parameters, including those outside the relationship with the vehicle itself. In view of the above any object with a temperature greater than absolute zero emits heat (a vehicle consists of several large heat-generating objects) [1,2]. Thus, every vehicle also emits infrared radiation in space. In modern vehicles, the temperature of the engine cooling system reaches 140 degrees Celsius. Depending on the vehicle and the coolant used, engine temperatures are observed in the range from 80 to 140 degrees [3,4]. In the exhaust system (muffler), temperatures range from 200 to 300 degrees Celsius. Thus, the differences between the background temperature and the exterior temperature of the vehicle components may differ by one or two orders of magnitude. In this way, depending on which vehicle element is registered in the measurement system, it is possible to register an object in a road lane. Unlike other infrared motion measurements, this approach uses the temperature characteristics of the measured object. So it is not only a binary recording or limited in terms of measuring the distance from the emitter. In this article, an example of measurements taken from a single temperature sensor is presented. In the form of a demonstration of the measurement method. In the commercial solution, the spatial structure of such sensors will be used, taking into account the construction of different types of vehicles. The resulting different spatial distribution of the thermal signatures of the vehicle’s shell. From the point of view of C-ITS systems, in which security considerations play a huge role, such a measurement method is relatively safe. Other systems used in C-ITS, especially vehicle telemetry systems, including autonomous vehicles, use measurement subsystems that can be jammed. In the approach in question, it is not so easy to mislead the measurement system. This would require a very specific approach. It is easier for hackers and cyberterrorists to break into C-ITS systems in Smart Cities using wireless networks.
This article presents exemplary preliminary analyzes of the infrared radiation accompanying the objects involved in road traffic in the selected cross-section of the road. The tests should be treated as a pilot (as mentioned above) , in which an attempt was made to find relations between the temperature recorded in the measurement cross-section and the presence of the vehicle in the observed section. Let us emphasize once again that at this stage of the research this is only a demonstration of the method. The commercial system will record the characteristics shown in this article in the spatial aspect.
For this purpose, a prototype of a measuring system consisting of a simple pyrometer, used in popular non-contact thermometers was used. In the presented research, the data obtained from the measurements of infrared radiation associated with the presence of a stream of vehicles in the road lane were compared with the measurement data of manual traffic recorders, the so-called vehicle counters. The advantage of the method is that each vehicle has some heat signatures (heat maps) that can be analyzed in the way indicated in this article. There are many disturbing factors, with low temperature differences in these heat maps. For example, vehicle paint, solar radiation, evaporation from the sewage system, etc. These problems will be summarized in the conclusion of the article.
On the one hand, the temperature distribution of vehicles in the road lane was investigated using the equipment presented in this article, and at the same time the intensity of vehicle traffic was recorded manually. The comparison of the results from both data sets allows for the formulation of further research hypotheses in order to carry out extended research in the field of infrared radiation radiation of the traffic stream. The purpose of such tests is to parameterize the traffic flow with the use of heat measurement from moving vehicles. This is a much broader study than simple vehicle or pedestrian registration with the use of a PIR sensor. Measurements performed using the proposed method are compared with manual and automatic recording in the vehicle traffic stream.
The spot measurement of infrared radiation from vehicles moving on the road is the subject of this article. Each vehicle, regardless of the drive used, is a source of heat, and therefore emits infrared radiation, although eV vehicles are slightly lower. Infrared radiation in vehicles comes from such elements as: muffler, engine, headlight, driver and any other elements that generate infrared waves. The distribution of these elements may vary depending on the make, model and type of vehicle, which may be the subject of interesting analyzes. On the other hand, the examination is simpler than with the use of infrared cameras. This method has interesting properties. Thermal signatures can be collected not only from the vehicle itself but also from the road. Electric vehicles are characterized by, for example, different traction properties, which can even be used to categorize the drive in the flow of vehicle traffic.
Even if there were no such elements (emitting heat) in the vehicle, up to the upper limit equal to the ambient temperature of approx. 37 degrees C (+- depending on the temperature in the vehicle, the environment and the method and material of the window glass production), such an element generating radiation is a human (people) in the vehicle. In the temperate climate zone, for most of the year it is possible to measure the presence of the vehicle, as the temperature of the driver is much higher than the ambient temperature (in temperate climates most of the year). In this case, the IR sensor has to be configured in specific way.
According to the authors, the measurement of infrared radiation from vehicles of the traffic flow may be helpful in reading information on the parameters of the traffic flow. Due to the final goal of the study, the construction of an effective and very cheap traffic sensor operating in the infrared band, the measurement concerns the recognition of the vehicle passing through the measurement cross-section and, possibly, determining its type. Type at least as to whether it is a heavy vehicle or not (minimum two categories). With the use of the presented test method, an attempt may be made to read the remaining parameters of vehicle traffic as an option. It should be remarked that this is supposed to be a cheap solution, because the goal is to build intelligent sensors for C-ITS systems and for various applications in the field of Smart Cities.
In order to estimate the parameters of the traffic flow with the use of vehicle temperature measurement, a prototype of an infrared radiation sensor was built based on the popular micro microcontroller system family. The prototype used one pyrometer from the GY-906xx-MLX family [5]. The prototype of the measuring system is presented in Figure 1.
Figure 1a shows the external panel of the measurement system on which a pyrometer and an infrared sensor (vehicle counter control receiver) are located, designed for the purpose of remote control of the microcontroller system. Figure 1b shows the internal panel of the measurement system on which the microcontroller system has been mounted. Figure 1c shows the measuring cross-section of the road located on the district road No. S5308 in the Silesia Voivodeship, Poland. It is a road with two lanes, one in each direction. The study used a GY-906-MLX pyrometer, which converts the infrared radiation of the measured object directly into its external temperature (depending on the distance of the sensor from the measured object). This sensor independently measures the background temperature at the point of the measurement section.
Attempts to research and analyze road traffic date back to the twenties of the twentieth century. The first work in this field was carried out by Frank Knight. The research, apart from the parameterization of traffic itself, served the purpose of formulating a mathematical theory of road traffic, which was reflected in the work of Wardrop from 1952 [6]. Subsequently, on the basis of research with the use of more and more advanced methods, this theory was updated or changed [7,8]. In the last two decades, the attention of researchers has been attracted by the dynamics of vehicle traffic and the behavior of the traffic flow in the conditions of road congestion. Treiber and Kerner [9,10]. This approach to the three-state flow theory is important because in conditions of permanent traffic congestion, the measurement proposed here will take place at lower traffic speeds and often with overheating of vehicle components, such as the engine or exhaust manifold.
Measurements of road traffic parameters, historically speaking, started with manual measurements, and with the development of measurement techniques, they turned into automatic measurements. The most popular measurement techniques include: pneumatic devices, piezoelectric sensors, induction loops [11]. Also used are measuring devices using the radar technique [12], vision techniques [13] and sound measurement [14].
In recent years, especially vision techniques, due to their undeniable advantages, have begun to dominate the parameterization of the traffic flow. This is due to declines in the prices of cameras with good technical parameters (more often intelligent cameras) and the development of moving image processing procedures [15,16,17,18].
In the coming years, due to the development of C-ITS systems and V2V and V2I technologies, road traffic will be parameterized using data from vehicles themselves [19,20,21,22,23,24]. This is a complete flip of the test method. The existing research conducted from the outside of the traffic stream is replaced by measurements performed inside the traffic stream. This, however, requires an appropriate level of application of road and technical infrastructure of means of transport with appropriate technology, which should be waited for the next several decades. The method presented fits perfectly into the data exchange in C-ITS systems, in Smart Cities, between roadside RSU (Road Side Unit) systems and on-board vehicle subsystems such as OBU (On Board Unit). Information about the traffic flow acquired by sensors such as the one presented can be also transferred in return direction to vehicles in the flow.
Infrared is used in road traffic measurements, for example in order to detect vehicles, road lane occupancy [25]. In this context, however, often the application of this measurement technique is not the measurement of motion parameters itself, but the functionality associated with advanced vehicle control systems. A similar group of techniques is observed with the use of Lidar lasers to measure road traffic [26,27,28]. In this case, the range of applied solutions is very wide, from relatively cheap devices to advanced systems of driving autonomous vehicles, which are very expensive at the same time. Simple (cheap) infrared sensors are mainly used to detect presence. Sensors of this class are offered on the market in two versions: passive and active. Passive react to temperature changes—these are the most commonly used motion (presence) sensors. Active devices operate on the principle of beam interruption. In road traffic, they are most often used to control pedestrian traffic. These sensors also measure road traffic for the purpose of changing traffic lights. Active infrared sensors control the detection zones using infrared (laser diodes, near infrared, 850 mm). Commercially used meters of this type classify into 11 types of vehicles, however, they are expensive and generally provided as integrated systems [29]. Sensors not dedicated specifically to the parameterization of movement, apart from determining the presence, movement are avaible in low prices.
According to the Authors, the proposed system can be more resistant to attacks on C-ITS systems in Smart Cities, both those from authorized users and those coming from outside the C-ITS system. This is a matter of the construction of the matrix of such sensors as the one described in this article.
Therefore, the idea of measuring traffic with the use of a very cheap autonomous sensor with simultaneous parameterization of the traffic flow for different traffic speeds is interesting. The more that in the summary section, further possibilities of using this type of sensor will be proposed, more widely than it is now.
2. Materials and Methods
The measurement principle and concept are very simple, it assumes that the sudden temporary increase in temperature is caused by the appearance of the vehicle in the measurement cross-section. In fact, the heat map image of the selected road cross-section changes. Figure 2 shows a diagram of the performed study. The measurer stands with the pilot (shown in Figure 1a), in which the keys correspond to the types of vehicles measured: SO, SD, SC, SCP, A, AP, MR and OTHER. It also has a direction selection button (it can measure both directions of movement in the measurement section at once. It is assumed that the commercial system will be installed in two and three (where possible) planes (layers) of traffic and will consist of a matrix of this type of sensors.
When the vehicle passes the measurement section, the person measuring the movement presses the button of the appropriate vehicle type. The vehicle code is transmitted to the microcontroller by means of the NEC transmission standard [2] via an infrared receiver located in the measurement system (Figure 2). The vehicle is stored in memory with an accuracy to the type, direction of movement and travel time. The travel time is recorded with accuracy to the vehicle or ambient temperature reading. The travel of the vehicle through the measuring cross-section is measured with an accuracy of approx. 0.5 sec (average response time typical for the population). The reaction time of the measuring person should be taken into account. In the population, this time ranges from 0.25 to 0.9 seconds. Thus, the average error should be within 0.5 seconds (slightly lower than the arithmetic mean). At the same time, the main measuring system uses a pyrometer to record the heat of the vehicle and / or the environment when there is currently no vehicle in the measuring cross-section. Information from the pyrometer is collected at the interval of 200 ms. The level of infrared radiation intensity is measured. All information is saved on a laptop connected to the microcontroller in the form of the temperature of the measured object and the environment.
3. Results
The presented measuring system was placed in the cross-section of the district road no. S5308 located in the Polish road network (Silesia Voivodeship). Both the intensity of traffic flows in both directions and the intensity of infrared radiation were investigated. The temperature during the tests was a few degrees near the road surface. In addition, gusty winds were observed during the tests. No precipitation was recorded during the study of atmospheric precipitation. The section loaded with light traffic was measured in order to count vehicles in both directions of traffic simultaneously.
Peak values such as that observed in Figure 3 (300 samples each) cause rapid solar exposure when sunlight shines for short periods of time between the clouds and illuminates the road. It should be noted that the distribution of changes in the ambient temperature and the measured objects in the road lane is of a different nature. Various types of disruptions and the authors’ methods of dealing with them are presented in the summary of the article.
Table 1 shows the standard deviations of the background and object temperatures measured at equivalent time intervals. As such, various characteristic ranges were adopted: for constant temperature, variable temperature and for a variable in one direction.
As can be seen from the comparison in Table 1, the background temperature variations are much lower than the object temperature variations. This is the case even when the ambient temperature rises or falls sharply. Thus, information is “hidden” in the temperature of the objects in the lane.
Figure 3 shows the background temperature plot during the test. The study of this parameter is important due to the interference from infrared radiation of objects outside the test cross-section (sun, strong light sources), which may reach the measuring system. In addition, the background temperature itself changes strongly, especially with sudden changes in solar exposure. The disturbance may also be of a different nature. In the case of the highest peak presented in Figure 4, the “disturbance” is the sweeper vehicle, which is moving at a minimum speed of 2-5 km / h. Here, a number of other problems may arise, such as thermal radiation from the ground (sewage) and buildings, depending on their insulation characteristics. Radiation from the stream of pedestrian traffic, etc. All the more so because the commercial system will be installed in two or three planes to the axis of the stream movement.
Figure 4 shows the measured temperatures of the objects (vehicles) in the measurement setup. The authors’ hypothesis states that this spectrum should reflect the elements of vehicles crossing the road cross-section, which are characterized by a higher temperature compared to the surrounding objects. These components include: engine, exhaust system, drivers, passengers, vehicle lights, etc. As can be seen from a careful analysis of Figure 4, this type of characteristic is characterized by a large variability of values and at the same time the dynamics of these changes. Therefore, it can be expected that it contains a number of information on vehicle traffic flows and the features of these vehicles. All that remains is to determine the reasonable methods for extracting traffic flow features from this type of characteristic.
Figure 5 presents the measured moments of the appearance of vehicles in a measurement cross-section with the simultaneous determination of their type in relation to the examined generic structure. The height of the measurement on the ordinate axis corresponds to the vehicle type, successive integer values were adopted. Successively the smallest bars represent passenger vehicles further: SD, SC, SCP, A, AP, MR and Others. The chart presented in Figure 5 shows the vehicles driving in both directions in the measurement cross-section. The traffic characteristics shown in Figure 5, Figure 6 and Figure 7 were measured using a hand-held traffic flow meter (own design). When using this method of measurement, the reaction time of the person performing the measurement has a significant impact, especially in the case of intensive traffic flow of vehicles driving at high speeds (motorway traffic). Therefore, additional tests of the reaction time of the person measuring were carried out and the average error was determined to be 0.4 sec., which is significantly less than the average in the population.
The right direction is the lane directly next to the measuring system, the left direction is carried out in the opposite lane.
The obtained results show that the movement of vehicles in the measurement cross-section is relatively symmetrical.
As can be observed from the illustration of Figure 8, the spectrum of the infrared radiation intensity image in combination with the vehicle meter data in the measurement section contains a huge amount of information. This spectrum is also not homogeneous, which allows to formulate a hypothesis that information about road traffic parameters is hidden in the infrared radiation spectrum. This hypothesis_1 can be varied with regard to the information on the number of vehicles and their type, as well as several other exogenous variables of the traffic flow, including the speed of the traffic flow. In Figure 8, the peaks accompanying the moments when the vehicles pass through the measurement section are observed. Very often it is observed that the larger the object, the higher the temperature.
4. Discussion
In the context of the study, the authors are interested in whether information about the parameters of the traffic flow is hidden in the infrared radiation spectrum. This requires the measured characteristics to be referenced to each other on a common time base. In Figure 9 and Figure 10, such an operation has been performed separately for the left and right directions. It is assumed that the measurement for vehicles going left (further away from the measurement system) will be less accurate. In addition, vehicles from this direction of traffic will interfere with the measurement of vehicles going to the right.
Figure 9 and Figure 10 show data from a vehicle counter and an infrared radiation intensity sensor plotted in a single graph. The drawings are distinguished by these orange lines—marking the moments of passage of vehicles in the respective directions of traffic. The orange lines correspond to the moments when the vehicle travels through the test section, driving to the left or to the right. The lane to the left is approx. 6.5 meters from the measuring system. For the right direction of traffic (Figure 10), a strong (close) correlation of the moments of the vehicle’s passage through the measurement cross-section with the peaks in the recorded spectrum of infrared radiation is visible. The peaks of both characteristics match almost exactly with each other. For the left direction (Figure 9), such a correlation is no longer visible to the “naked eye”. There are significant shifts both to the left and to the right in relation to the observed values on the abscissa for both recorded characteristics. Such shifts result from two reasons: the significant distance of the left lane from the measuring site, ca. 6.5 meters, sometimes due to the overlapping of vehicles in both traffic directions in the measurement section and the fact of making vehicle counts with the use of a manual counter. In the process of counting vehicles, there may be delays within the limits of the response time for the population: from 0.25 seconds to 0.9 seconds. Due to the fact that the measurement is performed by the same counters (the so-called measurement person) in a short period of time, this error should be constant in the short period of the test. In order to compare the above results with another period of movement in the same section, another measurement was carried out.
Measurement 2 was carried out right after the measurement No. 1. Figure 11 shows the “further” course of data from Figure 3 (the interval between measurements was 10 minutes). Figure 12 examines the temperature plot of the measured objects in the measurement cross-section. Figure 13 shows the examined characteristics of the vehicle traffic in a measurement cross-section. The value specifying the type of vehicle passing the measuring section is plotted on the abscissa axis. Figure 12 shows the movement of the vehicles in both directions in a measurement section.
Figure 14 shows the superimposed characteristics of the traffic of vehicles and the measured intensity of infrared radiation in a measurement cross-section. Preliminary analysis of this figure allows to find a correlation between the peak values of the intensity of infrared radiation and passing vehicles.
The vehicle registration event in the measurement cross-section can be written as the function:
| (1) | |||
| IP | - | vehicle registration event | [-] |
| - | [-] | ||
| - | momentary background temperature | [oC] | |
| - | distance of sensor | [m] | |
| - | velocity of vehicle | [m/s] | |
| - | |||
| - | measurement area specified for the sensor at distance Δl | [m2] | |
| - | the percentage of coverage of the measurement area with the area of the measured object (as a function of Δl and ΔS.) | [%] | |
| - | random factors | [-] |
5. Conclusions
The article presents only a pilot preliminary study, which allows to conclude that it is possible to measure the intensity of vehicle traffic with the use of infrared sensors on the basis of temperature characteristics. The example demonstrates the use of a single temperature sensor in a road cross-section, including a carriageway with a single lane of traffic in both directions. Ultimately, the commercial system will include two to three arrays of such sensors, located in three different planes and different spatial configurations of these sensors in the plane of the mounting frame (according to empirical studies).
High-intensity traffic flows have not been studied. This was due to the need to study two directions of movement simultaneously. Certainly, given a certain amount of traffic flow in the flow on the sensor side it will not be possible to study the opposite direction. This requires further research in this area.
According to the authors, by using the presented methodology it is possible to:
- counting the volume of vehicle traffic, as demonstrated in this article,
- determining the type structure of traffic, temperature measurement is related to the size of the vehicle—although precise conclusions in this regard require further research (the aspect of the distance traveled by the vehicle). This is mainly a problem of configuring connected sensors both from single RSUs and their sets and then correlating data from networks of such sensors.
- to a certain extent, the type of vehicle can be determined by measuring the height of the heat source (this requires the use of a system of linearly oriented pyrometers at different heights). As shown in Figure 15, a special sensor panel mounted in a plane parallel to the driving axis, with sensors specially arranged in the plane, can determine the vehicle type (with a certain probability).
- such a measurement is also possible by determining the spatial distribution of heat sources (this requires the use of a spatial arrangement of linearly oriented pyrometers at different heights and distances, Figure 15),
- determining the speed of vehicles, stream,
- assessment of the technical condition of vehicles by testing temperatures exceeding the defined ranges, which certainly requires much more elaborate measurement systems. Overheating of vehicle components may result from various causes and vary along the entire length of a specific vehicle’s path, but then, when using such sensors in C-ITS, it is possible to monitor the movement of such a vehicle in conjunction with ANPR systems.
- hypothetically on the basis of such measurement systems, a discussion about emissions in the measurement cross-section may developed.
The presented results were achieved with the use of only one simple pyrometer.
Another issue is the location of the pyrometer. The further it is located from the heat source, the less accurate the measurement is—the smaller are the temperature differences resulting from the vehicle passing through the measurement cross-section. From the point of view of the fact that parts with high temperatures are closer to the road surface than to the raodside, the location of the sensors would be indicated directly on the road surface. In this case, different sensors located in a different orientation to the axis of the lane would be able to distinguish temperatures in the engine system and exhaust system separately. An example of such an implementation is shown in the next figure, no. 16.
The low cost of the system is also important. The total cost of an integrated device with one measurement sensor should not exceed about $ 20, excluding the (wireless) transmission system. Such devices can be equipped with communication sub-systems in the LoRa standard. In such case, the problem arises of not exceeding 1% of the transmission time window in this system. The cost of implementing 10 test points per kilometer is $ 200—and is many times lower than 1 induction loop. In the case of the implementation of the system shown in Figure 15, the total cost is about 150€ for a network of 11 sensors together with a data transmission system. Here another problem, commonly known from C-ITS and Smart Cities systems, appears. It concerns the choice of processing the acquired data on traffic flow parameters in IoT or cloud technology. This can be done on the RSU side or directly in computing centers. In the latter case, there are again problems with the cybersecurity of such a solution. The search for alternative methods and technologies for detecting vehicles moving in the transport network continues to be an interesting research direction, both in road [31] and rail transport [32].
The main question is how to implement appropriate measurement algorithms for different road sections, different structures and different operating conditions. Thus, the use of temperature characteristics of infrared sensors offers a promising prospect in the field of low-cost traffic parameterization. At the same time, it is possible to mount measuring systems in various unusual places and elements.
The vehicle detection system concepts presented in Figure 15 and Figure 16 are differ from the commercial system for detecting heat sources in the traffic flow. The one in Figure 15 is focused on detecting regularities in heat maps obtained from this type of measurement. It is intended for use it at the data processing stage of machine learning algorithms. The one presented in Figure 16 is focused more on detecting specific heat sources expected in an approaching vehicle. Due to design changes, those resulting from the recent introduction of EVs, it may be unreliable. Design solutions related to the different location of the drive unit (engine) at the front or rear of the vehicle may be particularly misleading. In addition, reflectors placed on the roofs of off-road vehicles, including those belonging to emergency vehicles and taxis, may be misleading also.
At the stage of planning subsequent tests, it is important to optimally configure the set of sensors in individual groups (engine, muffler and exhaust gas) in order to detect the vehicle in the road cross-section with more accurate parameterization of the traffic flow (e.g., distance from the symmetry axis of the traffic lane). EV vehicles are characterized by lower operating temperatures of the electrical components. It is necessary to verify the proposed measurement methodology in this area.
As mentioned in the introduction, security and safety aspects are crucial and fundamental in C-ITS and Smart Cities. Many measurement systems can be disrupted at various stages. Data collection, transmission and analysis. Also during the generation and transmission of feedback and overload, e.g., with traffic light parameters. The data transmission and analysis stage is related to the popular issue of cybersecurity of C-ITS systems. According to the authors, the presented measurement system is resistant to attempts to disrupt the measurement itself and use this fact for attacks, including malicious attacks on the transport network. Precise generation of a false spatial and thermal signature, and in three different planes, will be practically impossible without interfering with the road lane, which will be additionally secured, e.g., by vision systems. In contrast, other measurement systems operating in the optical band are much more and easier to disrupt using basic technical means. In the case of LIDAR technology, e.g., by blinding the direct source. Traffic radar can be disrupted in an even more trivial way, e.g., by scattering a large number of plastic shopping bags on the road in strong winds. Security tests of the proposed commercial system will be implemented soon. The very resistance of various measurement systems in C-ITS, autonomous vehicles and Smart Cities will be the subject of further studies. Another issue is attacks carried out by authorized participants in the traffic flow in C-ITS or Smart Cities. Those who can fake the thermal signature of any vehicle, e.g., a privileged vehicle in traffic. Nevertheless, such malicious attacks originating from authorized users of the road network can critically affect any C-ITS system.
In the introduction it was also mentioned numerous potential interferences of the proposed solution such as solar radiation, evaporation from sewage, unauthorized heat sources in the road area (e.g., animals), municipal central heating installations, local ground anomalies and many others. One solution is to create maps of such elements accompanying the road network using GIS tools and to locate the measurement system outside these points. Alternatively, as in the case of solar radiation, correlating data in the measurement system with local changes in the physical parameters of a given phenomenon, including atmospheric ones.
According to the Authors, this type of system can be implemented equally well, or even better, in rail and water traffic (canals in cities such as Amsterdam, Venice, Toruń and many others). Especially in the latter water environment, due to large temperature differences between the means of transport and the infrastructure, it is a very promising technological solution. This type of technology can be used in a number of other C-ITS service solutions used in Smart Cities:
- identification of parking spaces in smart cities,
- in the V2L service for precise positioning of the charging point,
- in tunnels to identify threats related to extreme heat sources, e.g., overheated vehicle components or transported cargo,
- in creating digital twins for the road network using thermal signatures of road traffic flows,
- in combination with blockchain data, creating additional security based on unique thermal signatures,
- for recognizing patterns of behavior and characteristics in road traffic flows and other structures for further development using machine learning and pattern recognition,
- many other potentially developmental solutions, due to the dynamics of changes in the structure of heat maps from this type of research.
All this is possible using simple temperature sensors, which are much less expensive than thermal imaging cameras, the image from which must be processed using advanced vision techniques anyway. Such a system therefore constitutes an added value for both C-ITS and Smart Cities systems.
Author Contributions
For research articles with several authors, a short paragraph specifying their individual contributions must be provided. The following statements should be used “Conceptualization, I.C and R.B; methodology, I.C and R.B; software, I.C.; validation, I.C, A.Z and B.T.; formal analysis, I.C and R.B; investigation, I.C.; resources, I.C.; data curation, I.C.; writing—original draft preparation, I.C and R.B; writing—review and editing, I.C, R.B A.Z and B.T; visualization, I.C; supervision, I.C and R.B; project administration, I.C and R.B. All authors have read and agreed to the published version of the manuscript.” Please turn to the CRediT taxonomy for the term explanation. Authorship must be limited to those who have contributed substantially to the work reported.
Funding
Not applicable. Statutory funds.
Data Availability Statement
In the possession of the authors.
Acknowledgments
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rogalski, A.. Infrared Detectors, Second Edition, Institute of Applied Physics, Warsaw, Poland Publisher: CRC Press, Taylor & Francis Group, 2010.
- Capper, P.; Elliott, C.T. Infrared Detectors and Emitters: Materials and Devices, Springer, 2001.
- Bohacz, R. T. Engine Cooling Systems HP1425: Cooling System Theory, Design and Performance For Drag Racing, Road Racing,Circle Track, Street Rods, Musclecars, Imports, OEM Cars, Trucks, RVs and TowVehicles, HP Trade, 2007.
- Mackerle, M. E. Air-cooled Automotive Engines; Charles Griffin Ltd., London, 1972.
- Infrared sensor, https://www.sparkfun.com/datasheets/Sensors/Temperature/MLX 90614 _rev001.pdf.
- Wardrop, J. Some Theoretical Aspects of Road Traffic Research. Proceedings of the Institute of Civil Engineers, Part II, 1, 1952, pp. 325-378.
- May, A. Traffic Flow Fundamentals. Prentice Hall, Englewood Cliffs, NJ, 1990.
- Taylor, N. The Contram dynamic traffic assignment model TRL 2003.
- Kerner, B.S. The Physics of Traffic, Springer, Berlin, New York 2004.
- Treiber, M.; Kesting, A. Traffic Flow Dynamics, Springer, 2013.
- Wang, H.; Ouyang, M.; Meng, Q.; Kong, Q. A traffic data collection and analysis method based on wireless sensor network, J. on Wireless Comm. and Networking. 2020. [Google Scholar]
- Colonna, P.; Guaragnella, C.; Ranieri, V.; Fonzone, A. (2007). Use of Radar device in road traffic surveys. Lecture Notes in Computer Science, IV International SIIV Congress, Advances in Transport Infrastructures and Stakeholders Expectations, Palermo, Italy.
- Fernández-Llorca, D.; Salinas, C.; Jimenez, M.; Morcillo, A.; Izquierdo, R.; Díaz, L.; Sotelo, J. (2016). Two-camera based accurate vehicle speed measurement using average speed at a fixed point. 2533-2538. [CrossRef]
- Radam, I.; Heriyatna, E. (2018). A Correlation Analysis of Noise Level and Traffic Flow: Case of One Way Road in Banjarmasin. Asian Journal of Applied Sciences. 6.
- Bose, S.; Colaco, C.; Bagwe, M. (2020). Traffic Detection Using OpenCV. [CrossRef]
- Uke, N.; Thool, R. (2012). Moving Vehicle Detection for Measuring Traffic Count Using OpenCV. Journal of Automation and Control Engineering. [CrossRef]
- Beymer, D.; McLauchlan, P.; Coifman, B.; Malik, J. A real-time computer vision system for measuring traffic parameters in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Puerto Rico, June 1997, pp. 496–501.
- Kanhere, et al.l. Real-Time Detection and Tracking of Vehicle Base Fronts for Measuring Traffic Counts and Speeds on Highways in Transportation Research Board Annual Meeting, Washington, D.C., January 2007. TRB Paper Number: 07-3308.
- Smith, D.C. Vehicle to vehicle communications: Readiness for application, National Highway Traffic Safety Administration, 2018.
- Bazzi, A.; Masini, B.M. Taking advantage of V2V communications for traffic management, IEEE Intelligent vehicles, 2011.
- Outay, F.; Faouzi, K.; Kaisser, F.; Alterri, D.; Ansar-Ul-Haque, Y. (2019). V2V and V2I Communications for Traffic Safety and CO2 Emission Reduction: A Performance Evaluation. Procedia Computer Science. 151. 353-360. [CrossRef]
- Giordani, M.; Zanella, A.; Zorzi, M. LTE and Millimiter Waves for V2I Communications: An End to end performance comparison. In Proceedings of the VTC2019-Spring, Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [PubMed]
- 5GAA. V2X Functional and Performance Test Report. In Test Procedures and Results; 5G Automotive Association: Munich, Germany, 2019. [Google Scholar]
- Wang, H.; et al. , Night-Time Vehicle Sensing in Far Infrared Image with Deep Learning, J. of Sensors, vol. 2016, Article ID 3403451, 8 pages, 2016. [CrossRef]
- Grejner-Brzezinska, D. A. , Toth, C. (2002). Modern remote sensing techniques supporting traffic flow estimates. Proceedings, ION GPS, Sept. 24-27, 2423-2433.
- Zhang, Z.; Zheng, J.; Xu, H.; Wang, X. (2019). Vehicle Detection and Tracking in Complex Traffic Circumstances with Roadside LiDAR. Transportation Research Record, 2673(9), 62–71. [CrossRef]
- Zhao, H.; Sha, J.; Zhao, Y.; Xi, J.; Cui, J.; Zha, H.; Shibasaki, R. Detection and Tracking of Moving Objects at Intersections using a Network of Laser Scanners. IEEE Transactions on Intelligent Transportation Systems, Vol. 13, No. 2, 2012, pp. 655–670.
- Traffic Detector Handbook: Third Edition—Volume I, October 2006 https://www.fhwa.dot.gov/publications/research/operations/its/06108/06108.pdf.
- NEC protocol, https://techdocs.altium.com/display/FPGA/NEC+Infrared+Transmission +Protocol.
- Burdzik, R.; Celiński, I.; Ragulskis, M.; Ranjan, V.; Matijošius, J. Estimation of Vehicle Traffic Parameters Using an Optical Distance Sensor for Use in Smart City Road Infrastructure. J. Sens. Actuator Netw. 2024, 13, 35. [Google Scholar] [CrossRef]
- Orinaite, U.; Burdzik, R.; Ranjan, V.; Ragulskis, M. Prediction of approaching trains based on H-ranks of track vibration signals. Computer-Aided Civil and Infrastructure Engineering, 2024, 1–18. [CrossRef]
Figure 1.
Elements of the measuring system (functional prototype): (a) external panel-control (b) internal panel-microcontroller, (c) measuring cross-section in which the tests were carried out Source: Own research.
Figure 1.
Elements of the measuring system (functional prototype): (a) external panel-control (b) internal panel-microcontroller, (c) measuring cross-section in which the tests were carried out Source: Own research.
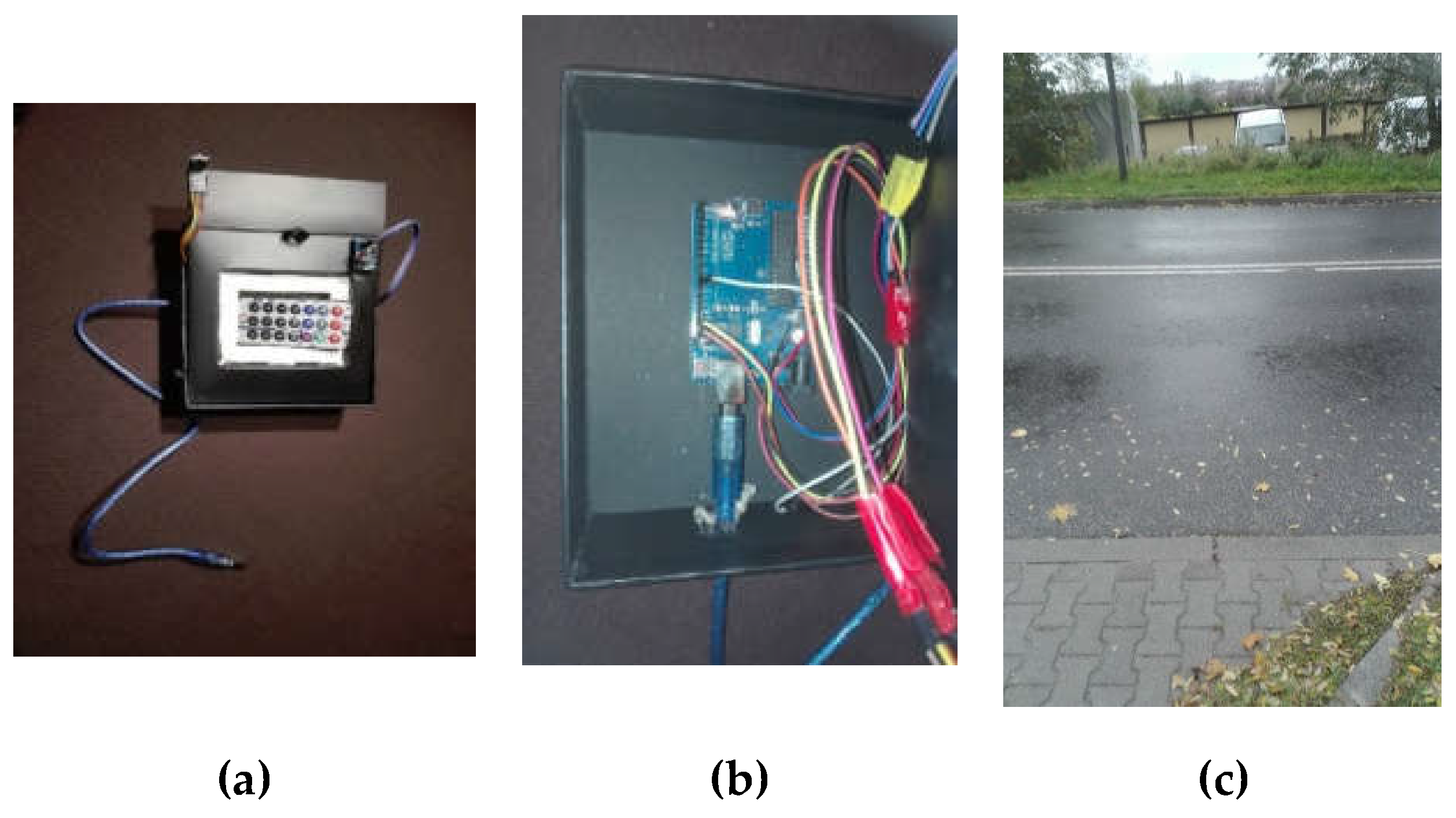
Figure 2.
Measurement diagram: PC-personal computer, IRR infrared receiver, µC- microcontroller, P- pirometer. Source: Own research.
Figure 2.
Measurement diagram: PC-personal computer, IRR infrared receiver, µC- microcontroller, P- pirometer. Source: Own research.
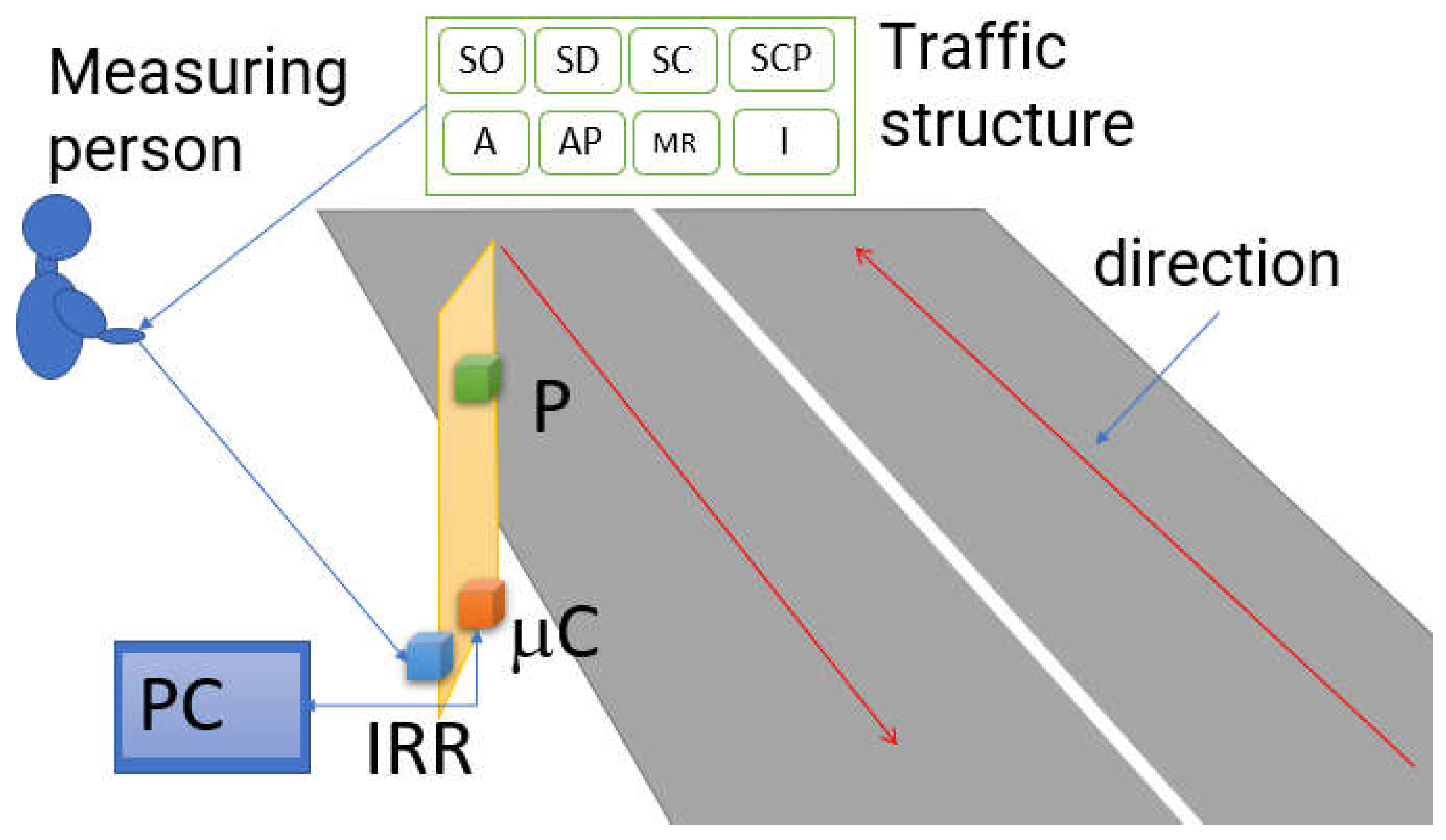
Figure 3.
Background (ambient) temperature. Source: Own research.
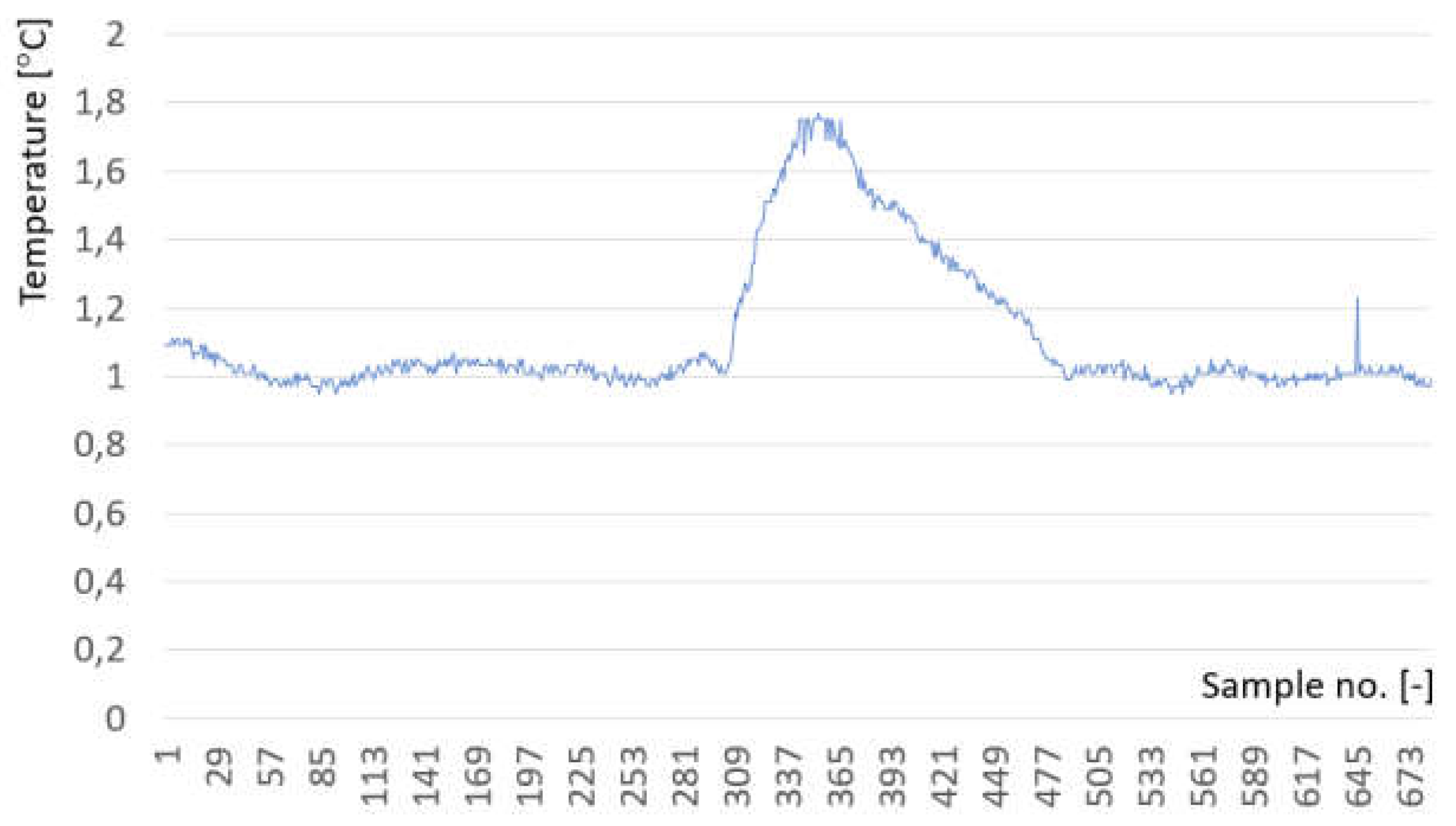
Figure 4.
Temperature of tested objects (vehicles). Source: Own research.
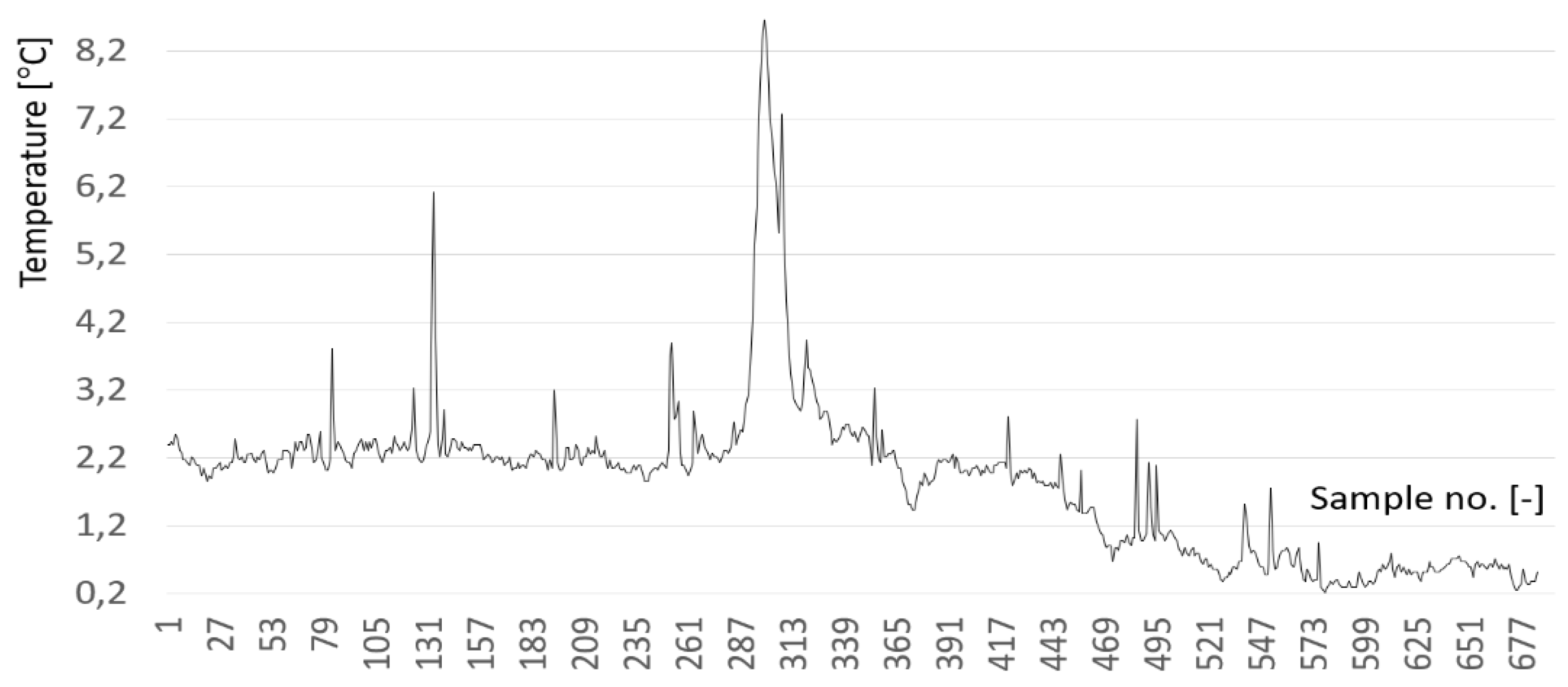
Figure 5.
Vehicle type (codes) recorded at each point in time. Source: Own research.
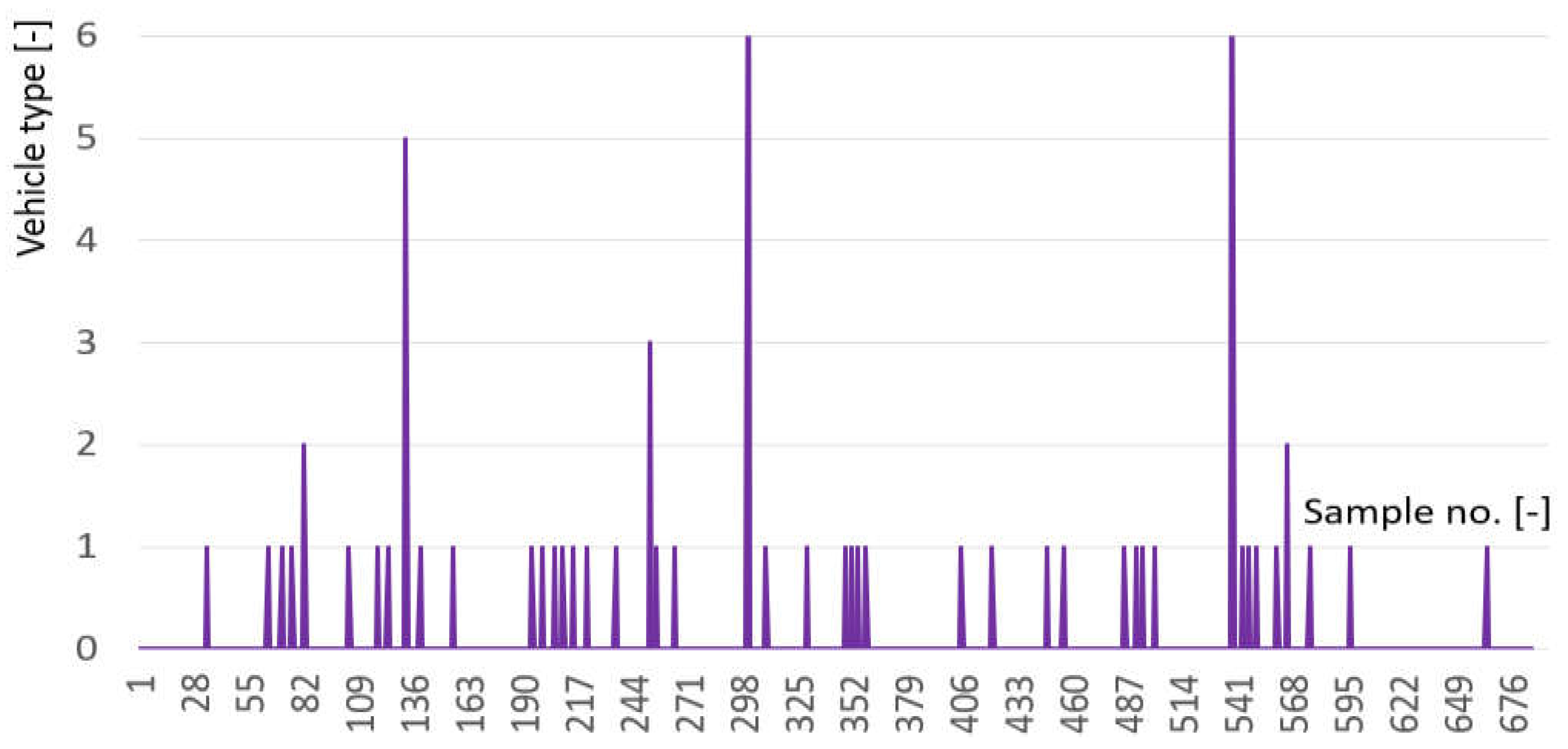
Figure 6.
Traffic flow, left direction. Source: Own research.
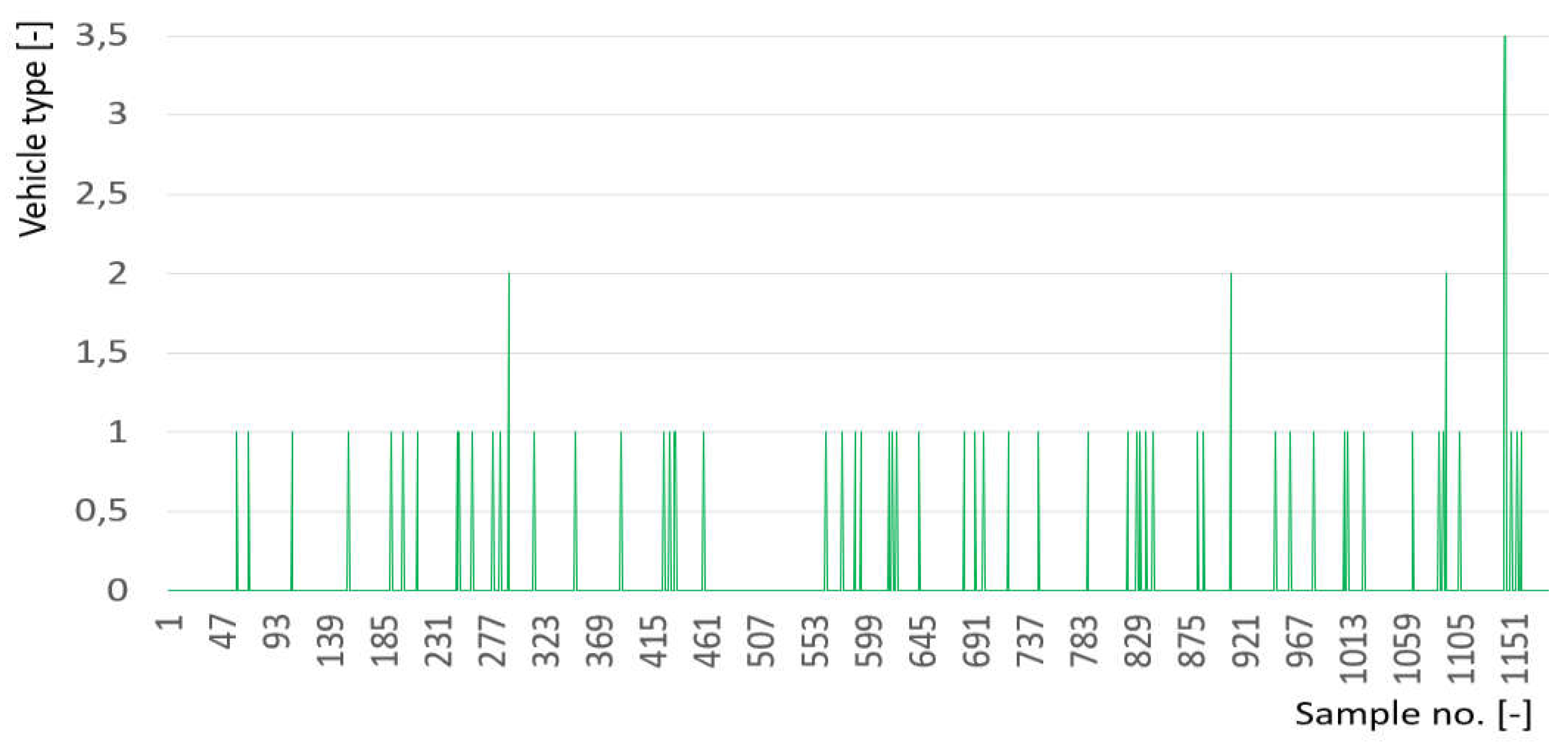
Figure 7.
Traffic flow, right direction. Source: Own research.
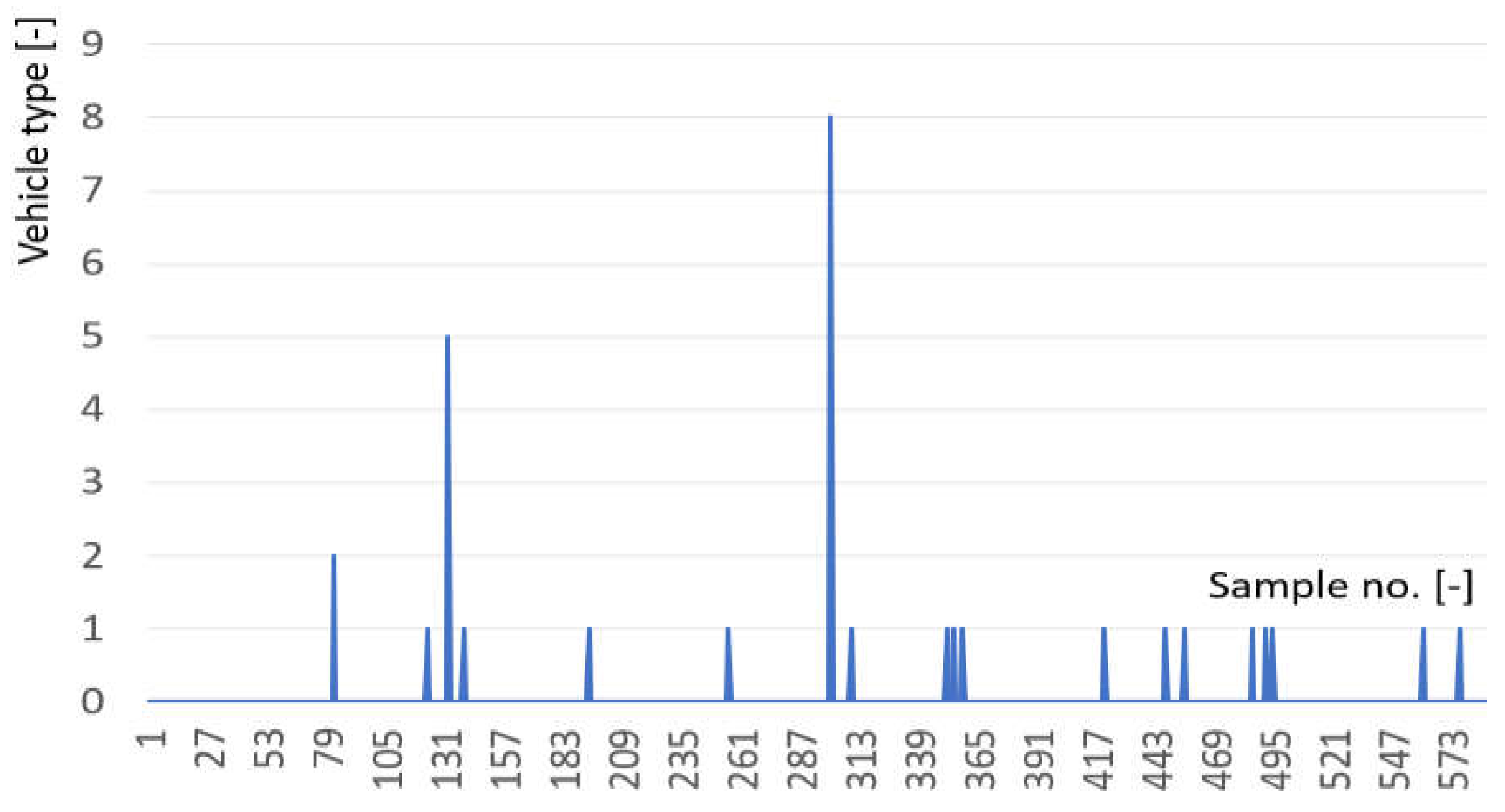
Figure 8.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, both traffic directions. Source: Own research.
Figure 8.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, both traffic directions. Source: Own research.
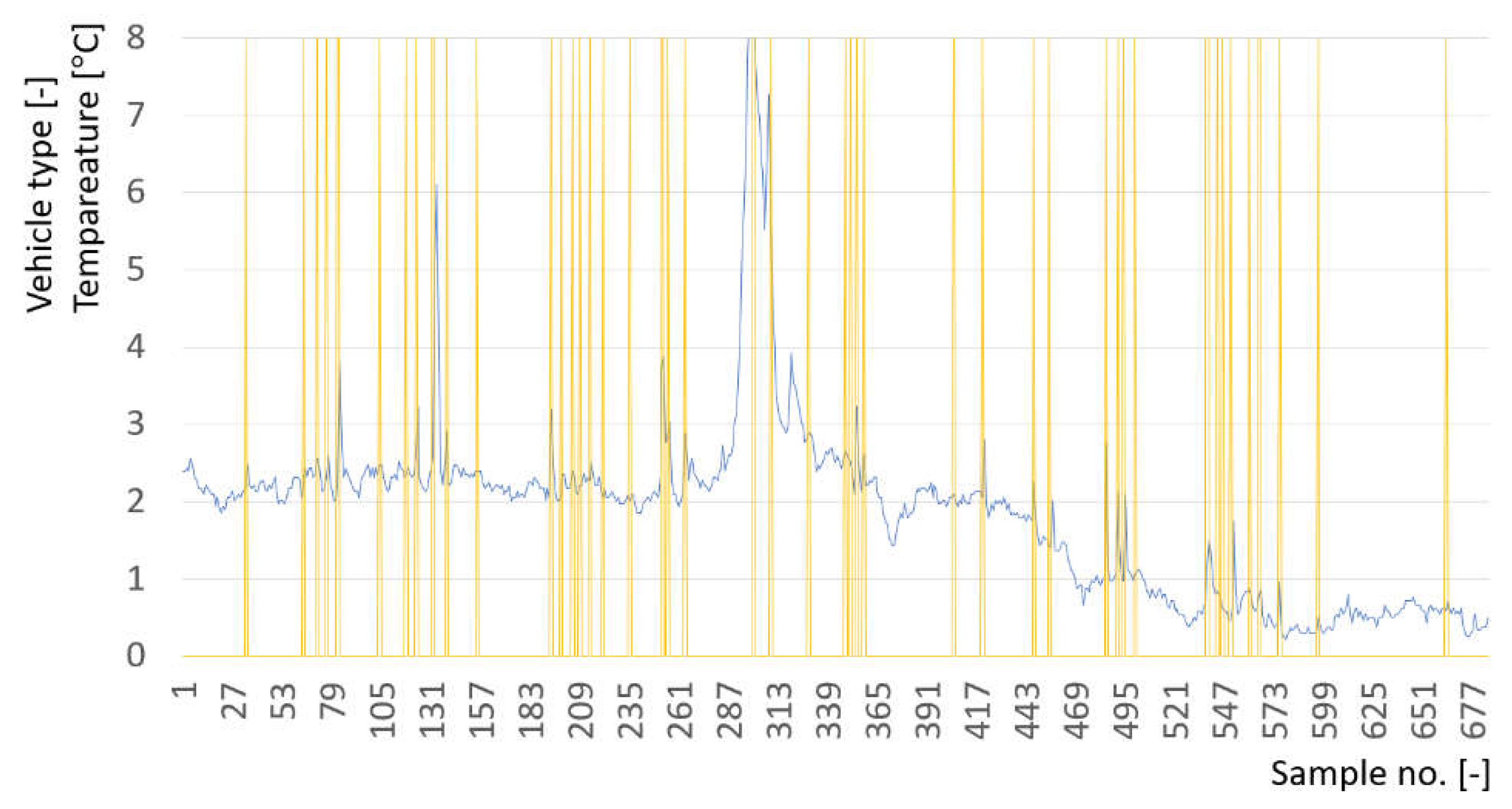
Figure 9.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, left direction. Source: Own research.
Figure 9.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, left direction. Source: Own research.
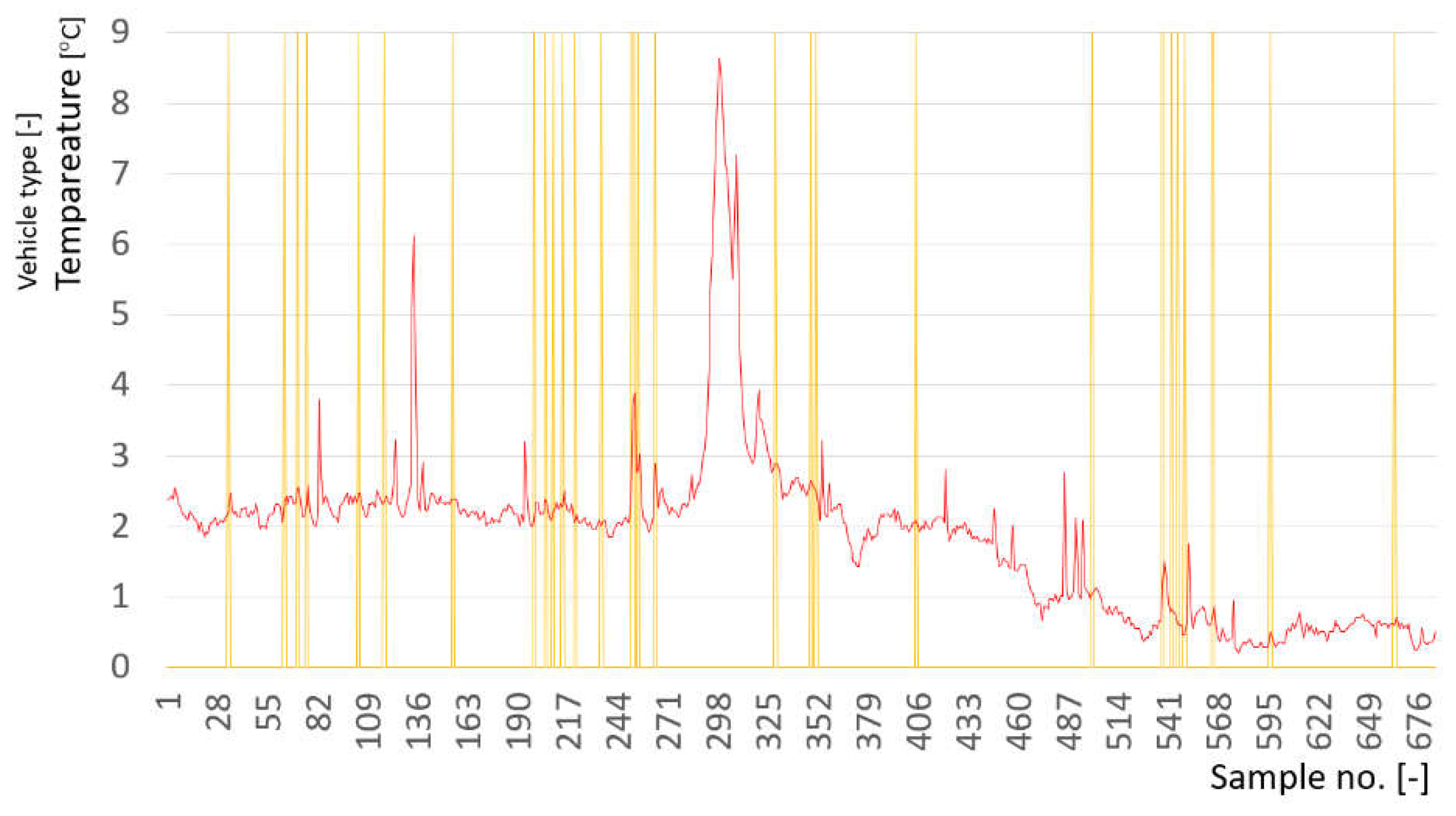
Figure 10.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, right direction. Source: Own research.
Figure 10.
Superimposing data from vehicle meters on the recorded intensity of infrared radiation, right direction. Source: Own research.
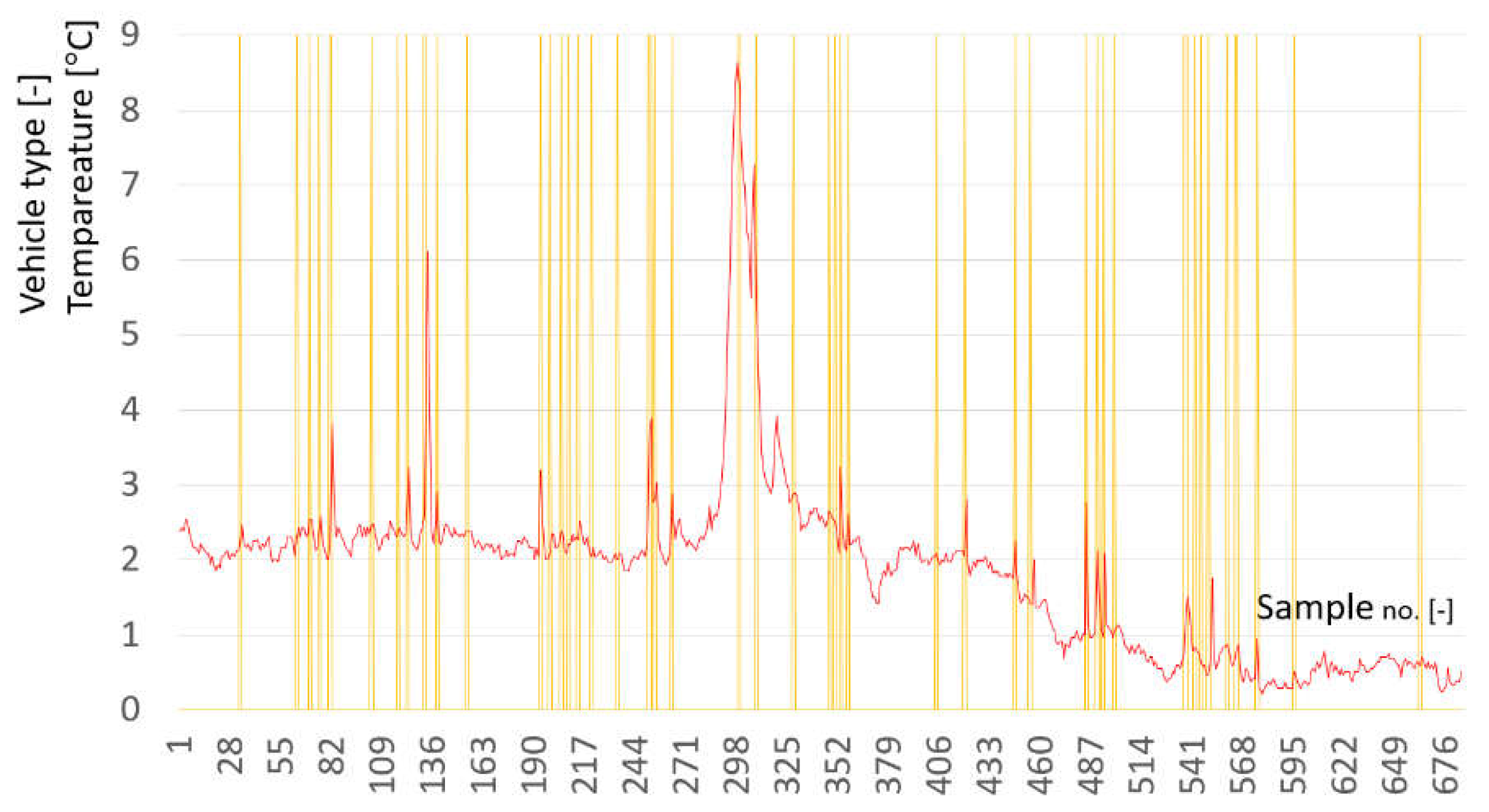
Figure 12.
Object (vehicle) temperature in the measurement cross-section, measurement 2. Source: Own research.
Figure 12.
Object (vehicle) temperature in the measurement cross-section, measurement 2. Source: Own research.
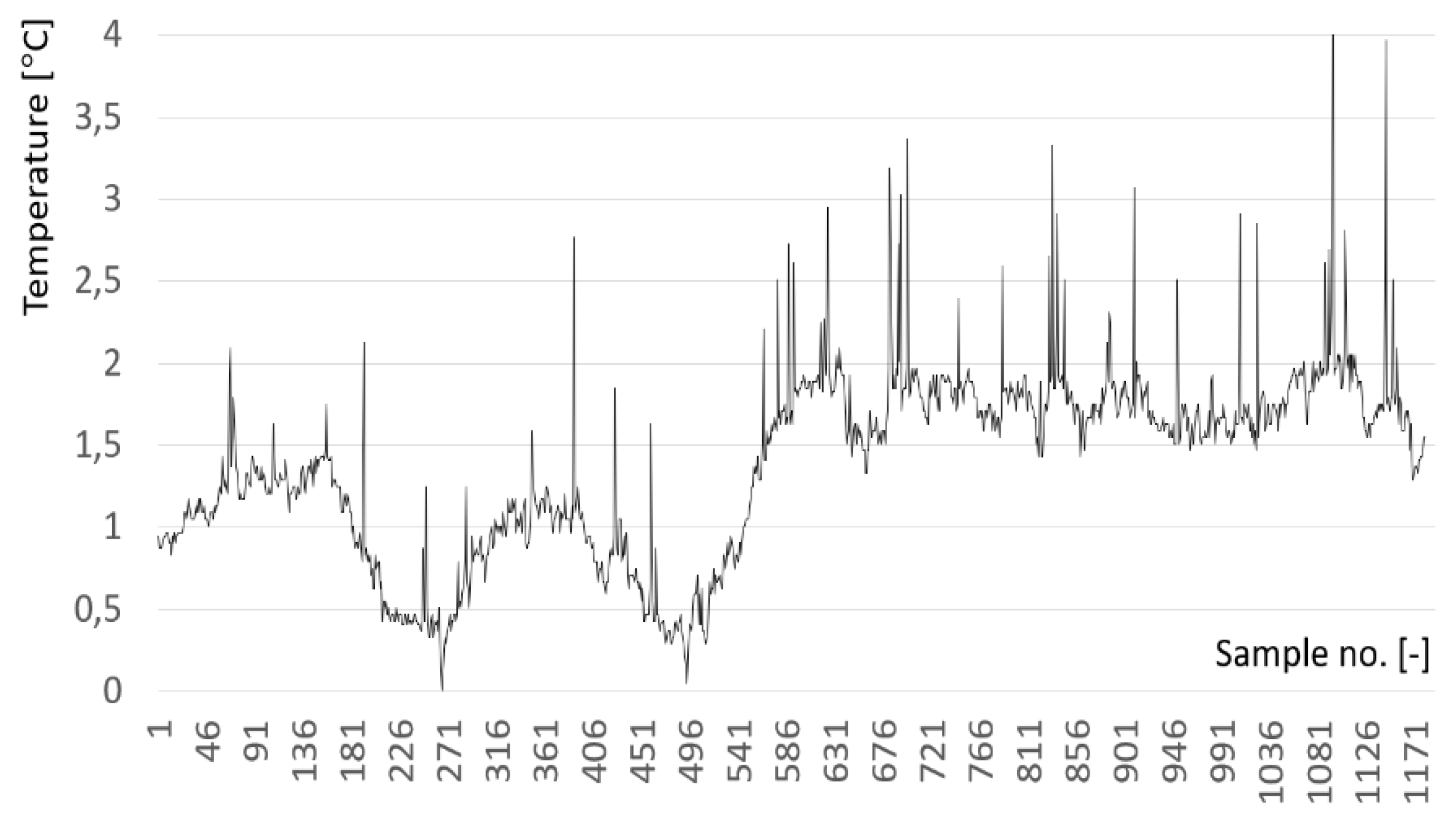
Figure 13.
Characteristics of vehicle traffic in the measurement cross-section, measurement 2. Source: Own research.
Figure 13.
Characteristics of vehicle traffic in the measurement cross-section, measurement 2. Source: Own research.
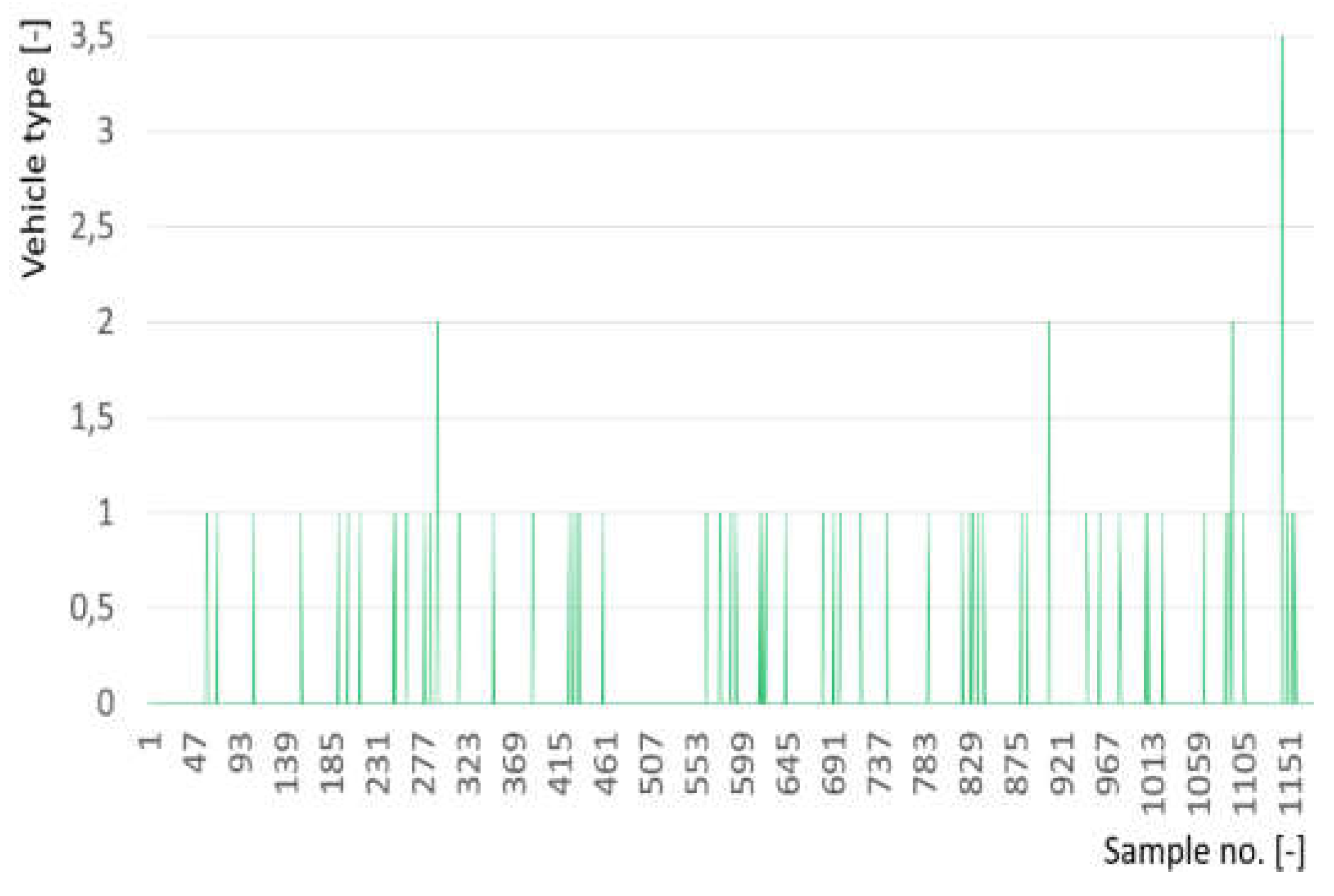
Figure 14.
Superimposing the characteristics of vehicle traffic in the measurement cross-section on the data from the infrared radiation sensor, measurement 2. Source: Own research.
Figure 14.
Superimposing the characteristics of vehicle traffic in the measurement cross-section on the data from the infrared radiation sensor, measurement 2. Source: Own research.
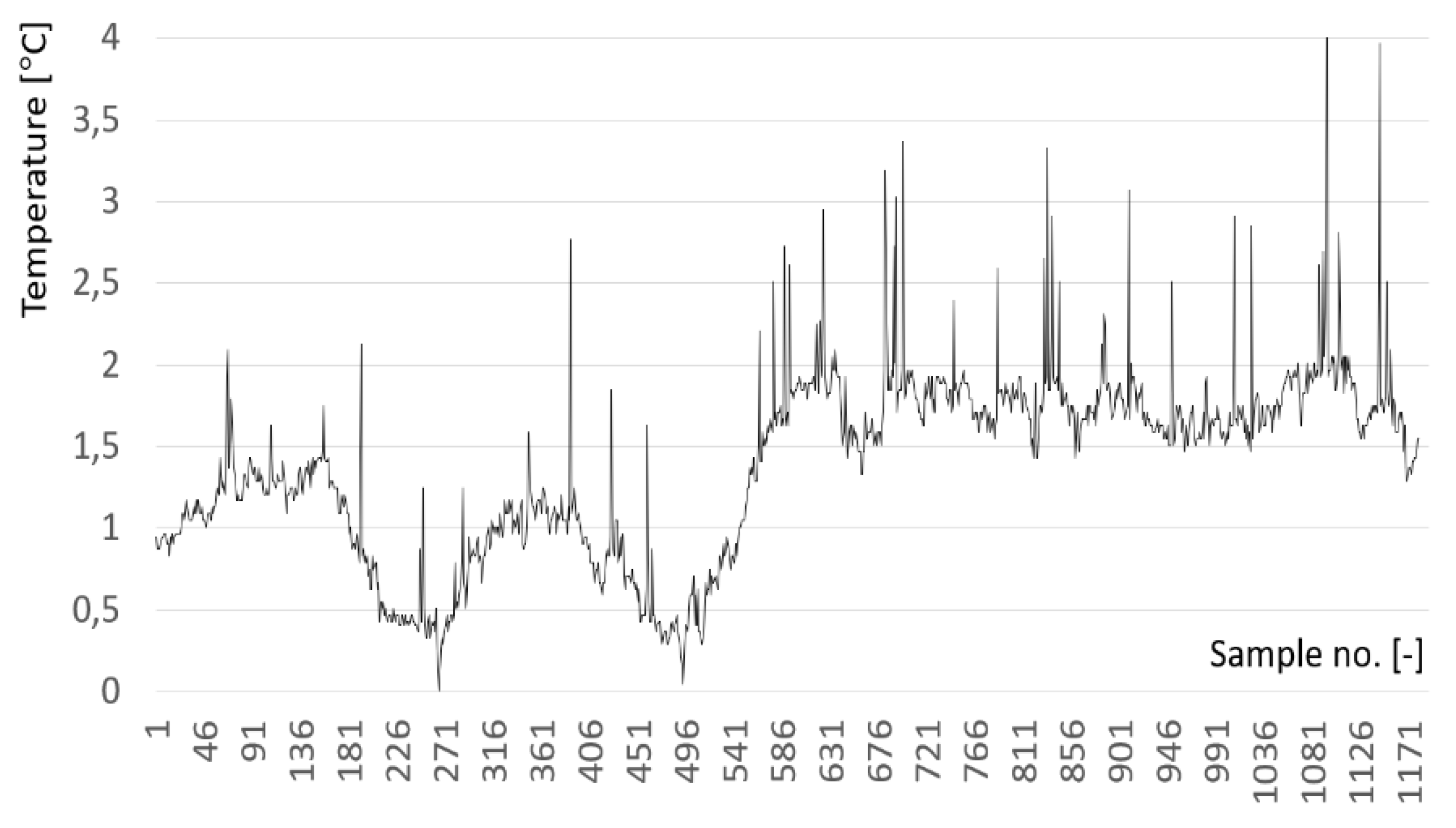
Figure 15.
Schematic diagram of the proposed commercial solution. Source: Own research.
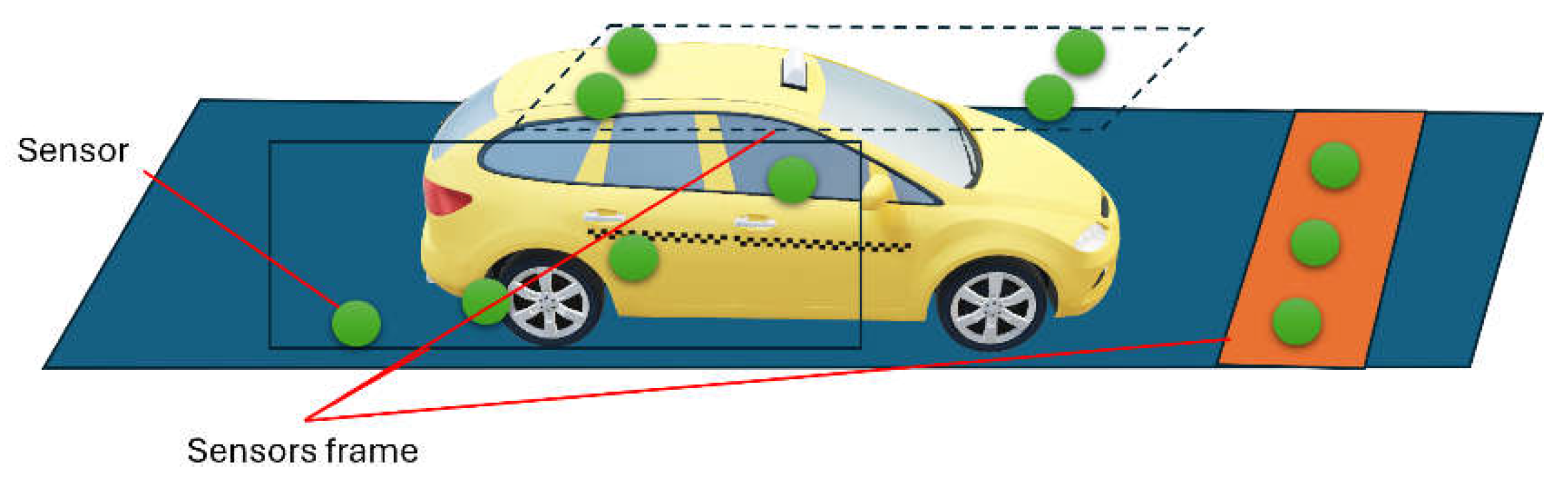
Figure 16.
Extended measuring system, concept. Source: Own research.
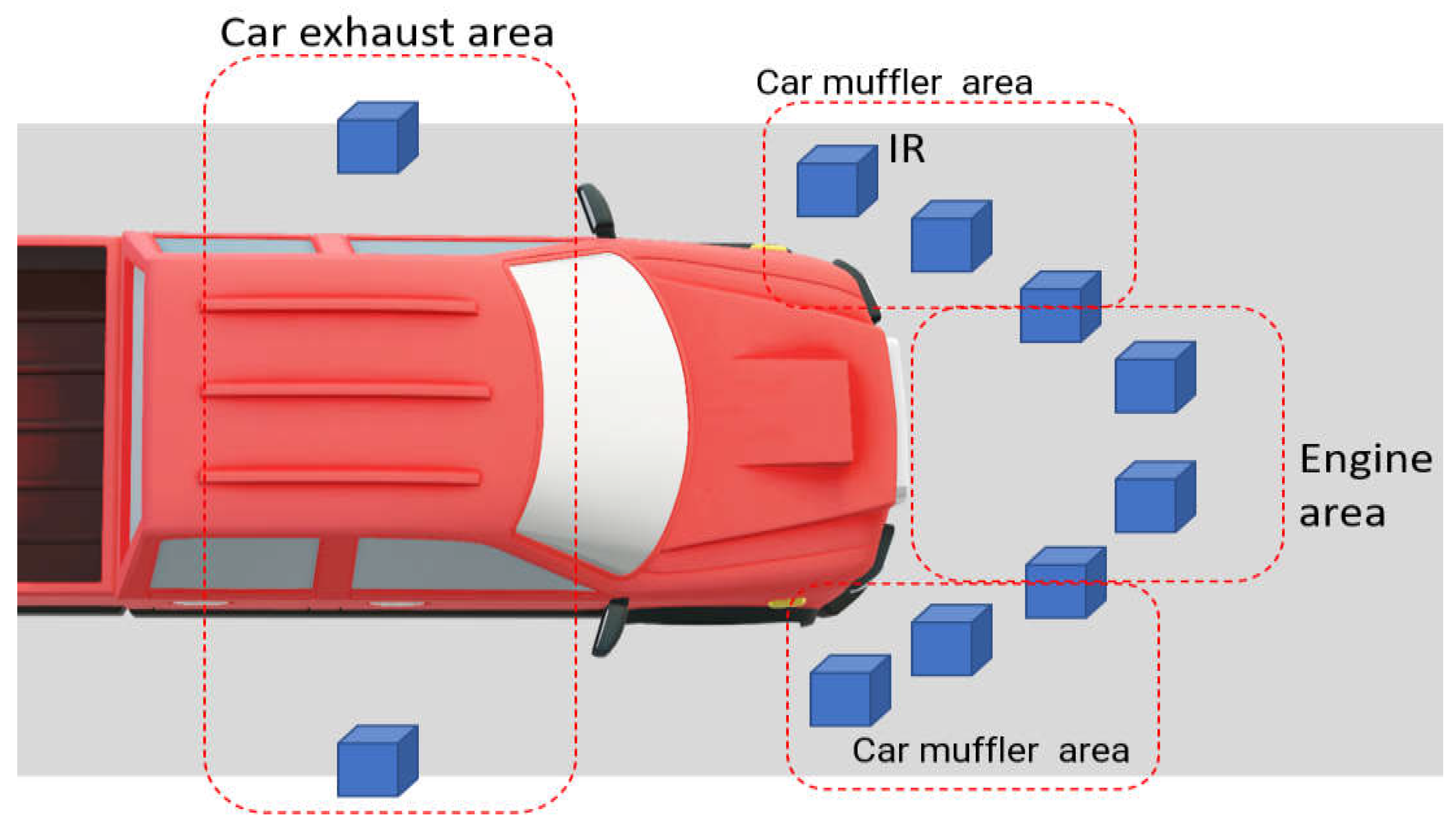

Table 1.
Standard deviations of background and object temperatures.
| Time intervals | STD—background [c] | STD—object [c] |
| 1 | 0,0320 | 0,3955 |
| 2 | 0,2075 | 0,7100 |
| 3 | 0,0253 | 0,2883 |
| 4 | 0,2517 | 1,6009 |
| 5 | 0,1983 | 0,4465 |
Time intervals: 1- Temperature constant over a long period of time, minimal fluctuations. 2- Temperature with large fluctuation amplitude. 3- Same as 1, after the changes stop. 4- The temperature is rising rapidly. 5- The temperature drops sharply.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



