
Submitted:
31 October 2024
Posted:
01 November 2024
You are already at the latest version
Abstract
In this paper, we consider the sensitivity of the controllable subspaces of single-input linear control systems to small perturbations of the system matrices. The analysis is based on the strict componentwise asymptotic bounds for the matrix of the orthogonal transformation to canonical form, derived by the method of the splitting operators. The asymptotic bounds are used to obtain probabilistic bounds on the angles between perturbed and unperturbed controllable subspaces implementing the Markoff inequality. It is demonstrated that the probability bounds allow to obtain sensitivity estimates which are much tighter than the usual deterministic bounds. The analysis is illustrated by a high order example.
Keywords:
perturbation analysis
; controllable subspaces
; linear control systems
; probabilistic bounds
MSC: 47A55; 93C05; 93C73; 93B05; 65F25
1. Introduction
The notion of controllable subspace plays an important role in linear control theory [26]([Ch. 1]), [7]([Ch. III]). In this paper we are interested in the sensitivity to small parameter perturbations of the controllable subspaces of single-input time-invariant linear control systems, described by the state equation
where is the state vector, is the control vector and . The subspace
is said to be the kth controllable subspace of (1). Clearly,
We have that
The subspace is said to be the controllable subspace of the pair . If , i.e., is the whole state space, then the system (1) and respectively the pair , is called controllable. If the system is controllable, then for every vector and there exists a continuous control such as the state vector of (1) with satisfies , i.e., each may be reached starting from each initial state . If , the system is said to be uncontrollable. Note that the controllability of a system is not affected by nonsingular transformations of the state or control vector. As it is well known [26]([Ch. 1]), the controllability is a generic property which is open and dense in the parameter space. The genericity means that each uncontrollable pair can be made controllable by arbitrary small perturbations of A and B.
In case of some perturbations of the system matrices A and B, the controllable subspaces change and for sufficiently large perturbations a controllable system may become uncontrollable one. That is why the sensitivity of the controllable subspaces of a linear control system is closely related to the magnitude of the distance of a controllable system to uncontrollable one, which is roughly defined as the size of the smallest perturbations in A, B that makes a controllable system uncontrollable one [2,5,16]. In accordance with the well known paradigm in the numerical analysis [3], it is justified to expect that the sensitivity of the controllable subspaces is inversely proportional to the distance to an uncontrollable system. However, in contrast to the numerous papers devoted on the estimation of the distance to an uncontrollable system (see [8,15,25,27], to name a few), the sensitivity of the controllable subspaces is not studied up to the moment.
In this paper, we consider the sensitivity of the controllable subspaces of single-input linear control systems to small perturbations of the system matrices that preserve the system controllability. The analysis is based on the new strict componentwise asymptotic bounds for the matrix of the orthogonal transformation to canonical form, derived by the method of the splitting operators [9]. The asymptotic bounds on the entries of the orthogonal transformation matrix are used to obtain probabilistic bounds on the angles between the perturbed and unperturbed controllable subspaces implementing the Markoff inequality. The analysis is illustrated by a high order example. The analysis performed and the example given demonstrate that in contrast to the deterministic bounds, the probabilistic bounds are much tighter with a sufficiently high probability. We note that the same approach of perturbation analysis is used in [20] to perform perturbation analysis of invariant, deflating and singular subspaces of matrices.
The paper is organized as follows. In sect. Section 2, we show how to find orthonormal bases of the controllable subspaces, using an appropriate system canonical form. Using the method of splitting operators, we derive asymptotic bounds on the controllable subspaces. In sect. Section 3.1, we briefly present some results concerning the derivation of lower magnitude bounds on the entries of a random matrices using only their Frobenius norm. In the same section, we describe the application of this approach to derive probabilistic perturbation bounds for the controllable subspaces of a single-input system. We illustrate the theoretical results by an example of 100th order system demonstrating that the probability bounds of the controllable subspaces are much tighter than the corresponding deterministic asymptotic bounds.
All computations in the paper are done with MATLAB®Version 9.9 (R2020b) [14] using IEEE double precision arithmetic. M-files implementing the perturbation bounds described in the paper can be obtained from the authors.
2. Asymptotic Perturbation Bounds for Controllability Subspaces
2.1. Orthonormal Bases of the Controllable Subspaces
Using a sequence of orthogonal similarity transformations in the form
the system (1) can be reduced to the form
where and and . For appropriately chosen orthogonal transformations, the matrices and acquire the form
and we say that the system (2) is in orthogonal canonical form [10,11] or Hessenberg form [13]. Details of the reduction can be found in the aforementioned references and in [24].
The controllability of the system (1) ensures that
(i.e., is an unreduced Hessenberg matrix [6]) and .
Orthonormal basis of the k-th controllable subspace can be obtained by using the orthogonal canonical form of the system. Let U be the orthogonal transformation matrix which reduces the pair into orthogonal canonical form. Partitioning this matrix by columns as
we have that
If the matrices A and B are subject to perturbation and , respectively, then instead of the decomposition (2), we have the decomposition
where the pair with
is again in orthogonal canonical form and is orthogonal, i.e., . The columns of the perturbed matrix of the orthogonal transformation
represent the basis vectors of the perturbed controllability subspaces
Further on, we shall assume that for small perturbations and the pair preserves its controllability, i.e., . Note that in this case and the perturbation analysis of the controllable subspace doesn’t represent interest.
The sensitivity of the canonical form without analyzing the sensitivity of the orthogonal transformation matrix U, is studied by several authors [12,13,18].
Denote for brevity the controllable subspace of dimension k by and its perturbed counterpart by , where . The sensitivity of the controllable subspace is measured by the canonical angles
between the perturbed and unperturbed subspaces. The maximum angle between and can be computed efficiently from [22]([Ch. 4]), [23]
where is the orthogonal complement of .
2.2. Perturbation Bounds by the Splitting Operator Method
Denote by
According to the splitting operator method [9], it is possible to derive separately perturbation bounds on and which allows to obtain tight bounds. For this aim, we introduce the perturbation parameter vector
where the components of x are the entries of the strictly lower triangular part of the matrix . Using this vector, it is convenient to find bounds on various elements related to the orthogonal canonical form and the transformation matrix U.
The matrix can be represented as
where
and the matrices
contains second order terms in .
The vector x can be found from the perturbations and as follows. From the relationships
we have that
The corresponding perturbed quantities satisfy
Assuming that the perturbations of the data are small, we can neglect the second order term thus obtaining asymptotic estimates. From (6) and (7) we find that
From the orthogonality of the matrix , it follows that so that up to the first order terms we obtain
In this way
Denote
and construct a vector h consisting of the columns of the strict lower part of the matrix , i.e.,
The system of equations (10) can represented as the linear system of equations for the perturbation parameters,
where is a matrix which is determined according to (8) from the entries of and as
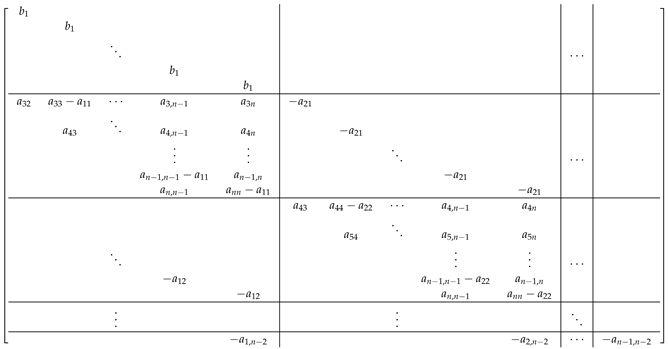
It is possible to show that the matrix M is determined by
where
and
The lower triangular matrix M is nonsingular, since due to the controllability of the system the diagonal entries are different from zero. With the decreasing of the magnitude of these entries, the distance to uncontrollable system decreases and the matrix M becomes worse conditioned. If some or several diagonal elements become zeros, than the system becomes uncontrollable and the matrix M becomes singular. This shows that there is a close connection between the singular values of M and the distance to uncontrollable system. More specifically, for small perturbations and , the smallest singular value of M can be considered as a measure of the distance to an uncontrollable system.
Since , we have that
where
is the asymptotic (linear) bound on .
According to (5), the matrix can be estimated as
where
is a first-order approximation of and contains higher order terms in x. Thus, an asymptotic (linear) approximation of the matrix can be determined as
Consider the sensitivity of a controllable subspace of dimension k. Since
we have that
Equation (18) shows that the sensitivity of the controllable subspace of dimension k is connected to the values of the perturbation parameters . Consequently, if the perturbation parameters are known, it is possible to find at once sensitivity estimates for all controllable subspaces with dimension . More specifically, let
where * is an unspecified entry. Then we have that the maximum angle between the perturbed and unperturbed invariant subspace of dimension k is given by
Thus, we obtain the following result.
Theorem 1.
The proof of Theorem 1 follows directly from (19), replacing the matrix by its linear approximation and substituting each by its approximation (15). Note that, as always in the case of perturbation bounds, the equality can be achieved only for specially constructed perturbation matrices and .
Similarly to the componentwise sensitivity analysis of the orthogonal transformation matrix, it is possible to find perturbation bounds on the entries of the matrices and .
3. Probabilistic Perturbation Bounds for Controllable Subspaces
3.1. Probabilistic Bounds for Random Matrices
The asymptotic perturbation bounds for controllability subspaces are usually pessimistic especially for high order systems. The conservatism of these estimates can be substantially reduced, if instead of the quantities and , producing the maximum possible (and unrealistic) perturbation bound (20), we use their estimates obtained for a specified probability. This can be achieved by exploiting the properties of perturbation matrices with random entries. We note that our approach to the analysis of the random matrices is different from the methods proposed by Edelman and Rao [4] and Stewart [21].
Assume we are given an random matrix with uncorrelated elements. To bound the entries of this matrix in the perturbation analysis, we have to use the matrix bound , so that , i.e.,
where and is some matrix norm. If we use the Frobenius norm of , we have the deterministic bound that guarantees the fulfillment of (21). However, for such a bound we have that
which yields very pessimistic results for large n and m. That is why to decrease , we shall reduce the entries of , taking a bound with , where . Obviously, in the general case such a bound may not satisfy (21) for all i and j. However, we can allow to exist some entries of the perturbation that exceed in magnitude with some prescribed probability the corresponding bound . The probability that can be determined by the Markoff inequality [17]
where is the probability that the random variable is greater or equal to a given number a and is the average (mean value) of . We note that the Markoff inequality is valid for arbitrary distribution of , which makes it conservative for a specific probability distribution. Applying the Markoff inequality with equal to the entry and a equal to the corresponding bound , we obtain the following result [19].
Theorem 2.
For an random perturbation and a desired probability , the estimate , where
and
satisfies the inequality
According to Theorem 2, the using of the scaling factor (23) guarantees that the inequality
holds for each i and j with probability no less than .
Theorem 2 can be used to decrease the mean value of the bound and hence the magnitude of its entries by the quantity , choosing the desired probability less than 1. The value corresponds to the case of the deterministic bound which fulfills (21). The value corresponds to , where . We note that the probability bound produced by the Markoff inequality is very conservative and the actual results are much better than the results predicted by the probability .
In the perturbation analysis, we frequently encounter the problem of determining a bound on the elements of the vector
where M is given matrix and is a random vector with known probabilistic bound on its elements. It may be shown that it is valid the following deterministic linear componentwise bound
A probability bound on can be determined by the following theorem [19].
Theorem 3.
If the estimate of the parameter vector x is chosen as , where Ξ is determined according to
then
Since
the inequality (27) shows that the probability estimate of the component can be determined, if in the linear estimate (25) we replace the perturbation norm by the probability estimate , where the scaling factor is taken as in (26) for a specified probability . In this way, instead of the linear estimate , we obtain the probabilistic estimate
3.2. Probabilistic Sensitivity Analysis of Controllable Subspaces
To determine tighter perturbation bounds of the controllable subspaces, we replace the Frobenius norms of the matrix perturbations and in the linear estimate (20) by much smaller probabilistic estimates of the perturbations entries, determined by using Theorems 2 and 3. This makes possible to decrease with a specified probability the perturbation bounds for the different subspaces achieving realistic results for higher dimensional problems. For this aim, we replace and in (20) by the ratios and , where
Using Theorem 3, the probabilistic perturbation bounds of x and can be found from (15) and (17), replacing in (15) the perturbation norms and by the quantities and , respectively. In this way, we obtain the probabilistic asymptotic estimate
of the maximum angle between the perturbed and unperturbed invariant subspace of dimension k.
3.3. A Numerical Example
In this example, we present the asymptotic deterministic perturbation bounds for the controllable subspaces, along with the probabilistic bounds obtained by using the Markoff inequality.
Example 1.
Consider a single-input linear system with matrix A, taken as
where
and the matrix is constructed as [1]
where are elementary reflections, σ is taken equal to and . The parameter σ is used to change the conditioning of the matrix and the parameter p is used to change the conditioning of the controllable subspaces.
The perturbation of A and B are taken as , , where and are matrices with random entries with normal distribution and , . The matrix M in (11) is of order and its inverse satisfies . This shows that the problem for the sensitivity of the controllable subspaces is ill-conditioned since the perturbations of A and B can be magnified times in x and, consequently, in and . The minimum singular value of M is equal to , which shows that perturbations of size may transform the given system to uncontrollable one.
In Figure 1 we show the mean value of the matrix and the relative number of the entries of the matrix for which , and in Figure 2 - the corresponding quantities for , obtained for normal distribution of the entries of and and for different values of the desired probability . For the case of , the size of the probability entry bound decreases 10 times in comparison with the size of the entry bound , which allows to decrease the mean value of the ratio from to (Table 1). For , the probability bound is 60 times smaller than the bound and even for this small desired probability the number of entries for which is still . The corresponding quantities for are shown in Table 2.

Table 1.
The mean value of the ratios and the relative number of entries for which , obtained for different values of ,
Table 1.
The mean value of the ratios and the relative number of entries for which , obtained for different values of ,
| % | % | ||
Table 2.
The mean value of the ratios and the relative number of entries for which , obtained for different values of ,
Table 2.
The mean value of the ratios and the relative number of entries for which , obtained for different values of ,
| % | % | ||
In Figure 3 we compare the asymptotic bound and the probabilistic estimate with the actual componentwise perturbations for normal distribution of perturbation entries and probabilities and . The probabilistic bound is much tighter than the linear bound and the inequality is satisfied for all entries and chosen probabilities. In particular, the size of the estimate is 10 times smaller than the linear estimate for , 20 times for and 40 times for . In Figure 4 we show the ratio (left) and the ratio (right) for for normal random distributions of the entries of the matrices A and B. Note that the mean value of ratio for the probabilistic estimate is 40 times smaller than the mean value for the deterministic estimate and its value for each i and j is greater than 1.
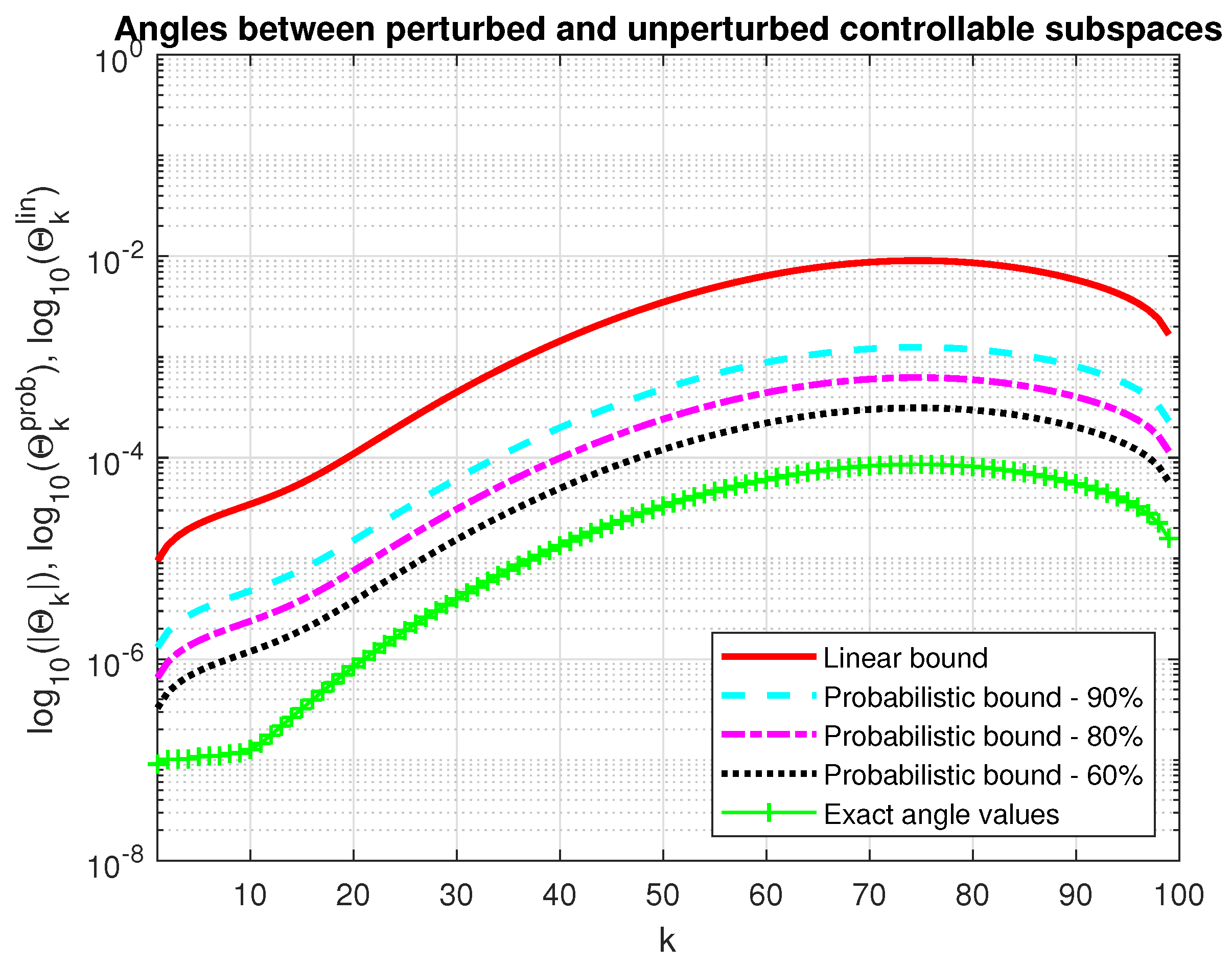
In Figure 5 we show the asymptotic bound and the probabilistic estimate along with the exact value of the maximum angle between the perturbed and unperturbed controllable subspace of dimension for the same probabilities and . The probability estimate satisfies for all .
4. Conclusions
In this paper we present asymptotic and probabilistic perturbation bounds of the controllable subspaces of linear single-input control systems. The probabilistic bounds are considerably less conservative than the corresponding deterministic bounds with sufficiently high probability that make them suitable for high order problems. However, they may require a large number of computation due to the using of the Kronecker products. The analysis presented in this paper, is also valid for linear discrete-time single-input systems with a state-space description
By duality, the results of this paper can be also used to analyze the observability subspaces of linear systems.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets generated during the current study are available from the author upon reasonable request.
Conflicts of Interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Notation
| , | the set of real numbers; |
| , | the space of real matrices; |
| , | a matrix with entries ; |
| , | the jth column of A; |
| , | the ith row of an matrix A; |
| , | the part of matrix A from row |
| to and from column to ; | |
| , | the strictly lower triangular part of A; |
| , | the matrix of absolute values of the elements of A; |
| , | the transposed of A; |
| , | the inverse of A; |
| , | the zero matrix; |
| , | the unit matrix; |
| , | the perturbation of A; |
| , | the Frobenius norm of A; |
| , | equal by definition; |
| ⪯, | relation of partial order. If , then means |
| ; | |
| , | the subspace spanned by the columns of X; |
| , | the orthogonal complement of U, ; |
| , | the Kronecker product of A and B; |
| , | the probability of the event ; |
| , | the average value or mean of the random variable ; |
| , | the number of the entries of A that are |
| greater or equal to the corresponding entries of B. |
References
- C. A. Bavely and G. W. Stewart, An algorithm for computing reducing subspaces by block diagonalization, SIAM J. Numer. Anal., 16 (1979), pp. 359–367. [CrossRef]
- D. Boley and W.-S. Lu, Measuring how far a controllable system is from an uncontrollable one, IEEE Trans. Automat. Control, 31(1986), 249–251. [CrossRef]
- J.W. Demmel, On Condition Numbers and the Distance to the Nearest Ill-Posed Problem, Numer. Math., 51(1987), 251–289. [CrossRef]
- A. Edelman and N.R. Rao, Random matrix theory, Acta Numer., 14 (2005), pp. 1–65. [CrossRef]
- R. Eising, Between controllable and uncontrollable, Systems & Control Letters, 4 (1984), 263–264. [CrossRef]
- G. H. Golub and C. F. Van Loan, Matrix Computations, The Johns Hopkins University Press, Baltimore, MD, fourth ed., 2013. ISBN 978-1-4214-0794-4.
- J. P. Hespanha, Linear Systems Theory, Princeton University Press, Priceton, NJ, second ed. 2018. ISBN 978-0691179575.
- S. C. Johnson and M. Wicks and M. Žefran and R. A. DeCarlo, The Structured Distance to the Nearest System Without Property P, IEEE Trans. Automat. Control, 63 (2018), 2960–2975. [CrossRef]
- M. Konstantinov and P. Petkov, Perturbation Methods in Matrix Analysis and Control, NOVA Science Publishers, Inc., New York, 2020, https://novapublishers.com/shop/perturbation-methods-in-matrix-analysis-and-control.
- M. Konstantinov, P. Petkov, N. Christov, Invariants and canonical forms for linear multivariable systems under the action of orthogonal transformation groups, Kybernetika, 17 (1981), 5, 413-424. ISSN 0024-5954.
- M. Konstantinov, P. Petkov, N. Christov, Orthogonal invariants and canonical forms for linear controllable systems, IFAC Proceedings Volumes, 14 (1981), 49 -– 54. [CrossRef]
- M. Konstantinov, P. Petkov, D. Gu., I. Postlethwaite, Perturbation analysis of orthogonal canonical forms, Linear Algebra Appl., 251 (1997), 267-291. [CrossRef]
- A. J. Laub and A. Linnemann, Hessenberg and Hessenberg/triangular forms in linear system theory, Int. J. Control, 44(1986), 1523–1547. [CrossRef]
- The MathWorks, Inc., MATLAB Version 9.9.0.1538559 (R2020b), Natick, MA, 2020, http://www.mathworks.com.
- E. Mengi, On the estimation of the distance to uncontrollability for higher order systems, SIAM J. Matrix Anal. Appl., 30(2008), 154–172. [CrossRef]
- C. Paige, Properties of numerical algorithms related to computing controllability, IEEE Trans. Automat. Control, 26 (1981), 130–138. [CrossRef]
- A. Papoulis, Probability, Random Variables and Stochastic Processes, McGraw Hill, Inc., New York, 3rd edition, 1991. ISBN 0-07-048477-5.
- P. Petkov, Perturbation bounds for orthogonal canonical forms and numerical controllability analysis, IEEE Trans. Automat. Control, 38 (1993), 639-643. [CrossRef]
- P. Petkov, Probabilistic Perturbation Bounds of Matrix Decompositions, Numer. Linear Algebra Appl., 31(2024), 1–40. [CrossRef]
- P. Petkov, Probabilistic Perturbation Bounds for Invariant, Deflating and Singular Subspaces, Axioms, 13(2024), 597. [CrossRef]
- G. W. Stewart, Stochastic perturbation theory, SIAM Rev., 32 (1990), pp. 579–610. [CrossRef]
- G. W. Stewart, Matrix Algorithms; Vol. II: Eigensystems, SIAM: Philadelphia, PA, 2001. ISBN 0-89871-503-2.
- G. W. Stewart and J.-G. Sun, Matrix Perturbation Theory, Academic Press, New York, 1990. ISBN 978-0126702309.
- P. M. Van Dooren, The generalized eigenstructure problem in linear system theory, IEEE Trans. Automar. Contr., 26 (1981), pp. 111-129. [CrossRef]
- M. Wicks, R. A. DeCarlo. Computing the distance to an uncontrollable system, IEEE Trans. Automat. Control, 36 (1991), 39–49. [CrossRef]
- W. M. Wonham, Linear Multivariable Control. A Geometric Approach, 3rd ed., Springer-Verlag, New York, 1985. ISBN 0-387-96071-6.
- Z. Yun and Y. Chengwu, Formulae for the distance between controllable and uncontrollable linear systems, Systems & Control Letters, 21(1993), 173–180. [CrossRef]
Figure 1.
The mean value of as a function of (left) and the mean value of (right) as a function of for a normal random distributions of the entries of the matrix A
Figure 1.
The mean value of as a function of (left) and the mean value of (right) as a function of for a normal random distributions of the entries of the matrix A
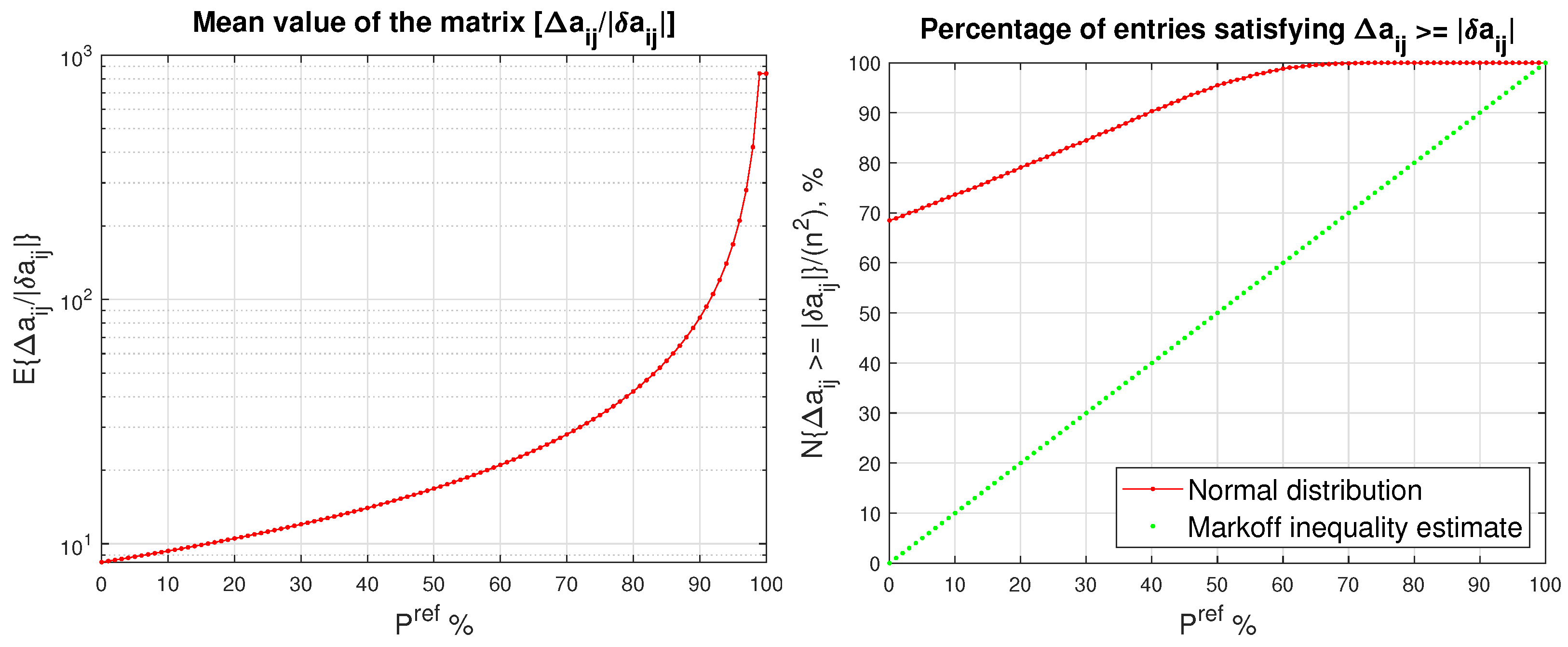
Figure 2.
The mean value of as a function of (left) and the mean value of (right) as a function of for a normal random distributions of the entries of the matrix B
Figure 2.
The mean value of as a function of (left) and the mean value of (right) as a function of for a normal random distributions of the entries of the matrix B
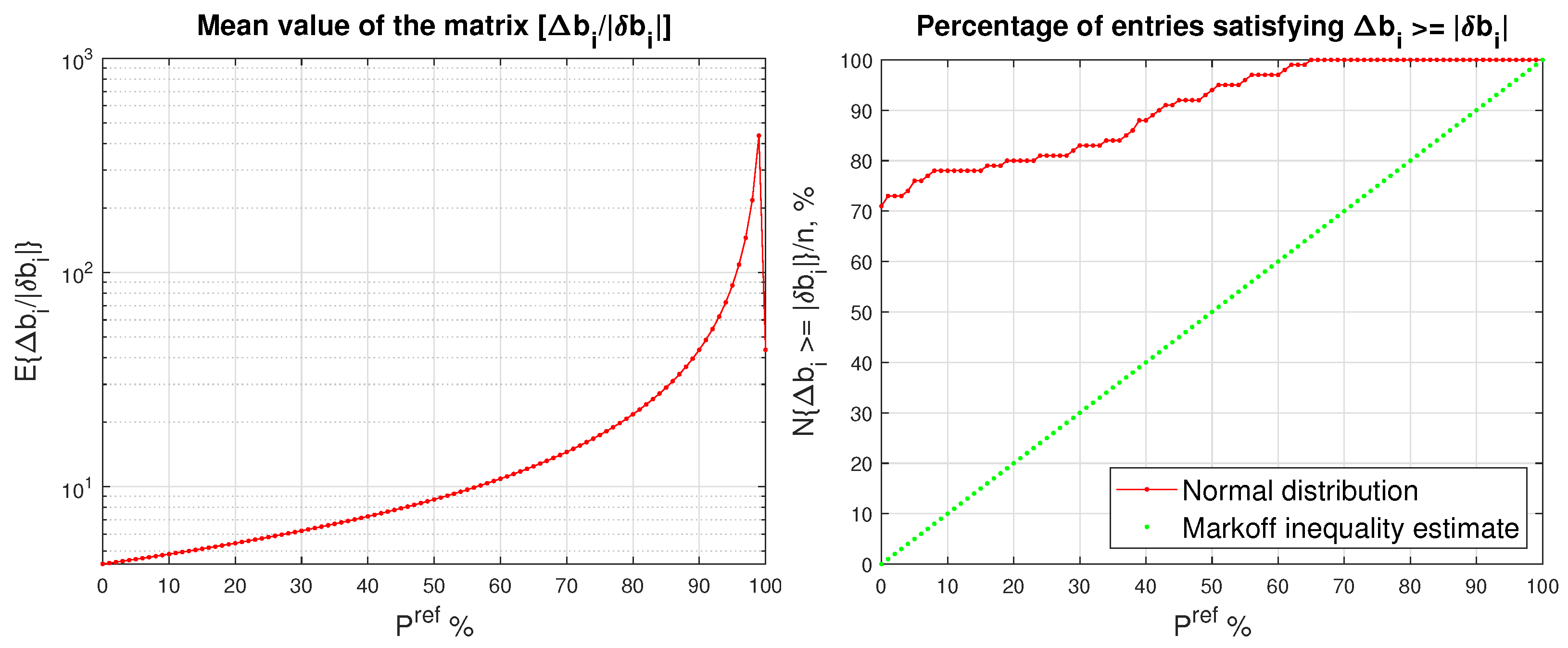
Figure 3.
Perturbation bounds of the entries of U for different probabilities
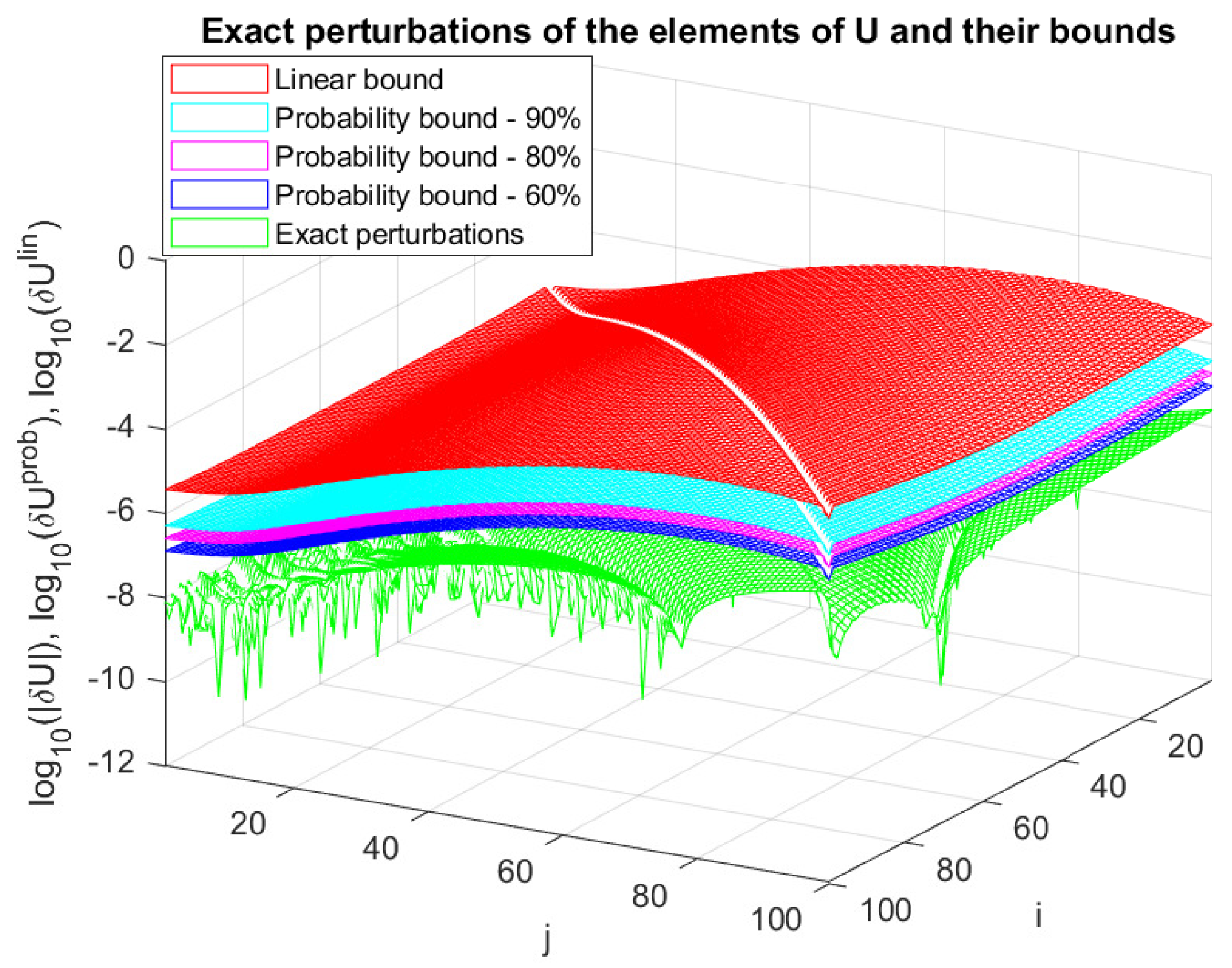
Figure 4.
The ratio (left) and the ratio for (right) for normal random distributions of the entries of the matrices A and B
Figure 4.
The ratio (left) and the ratio for (right) for normal random distributions of the entries of the matrices A and B
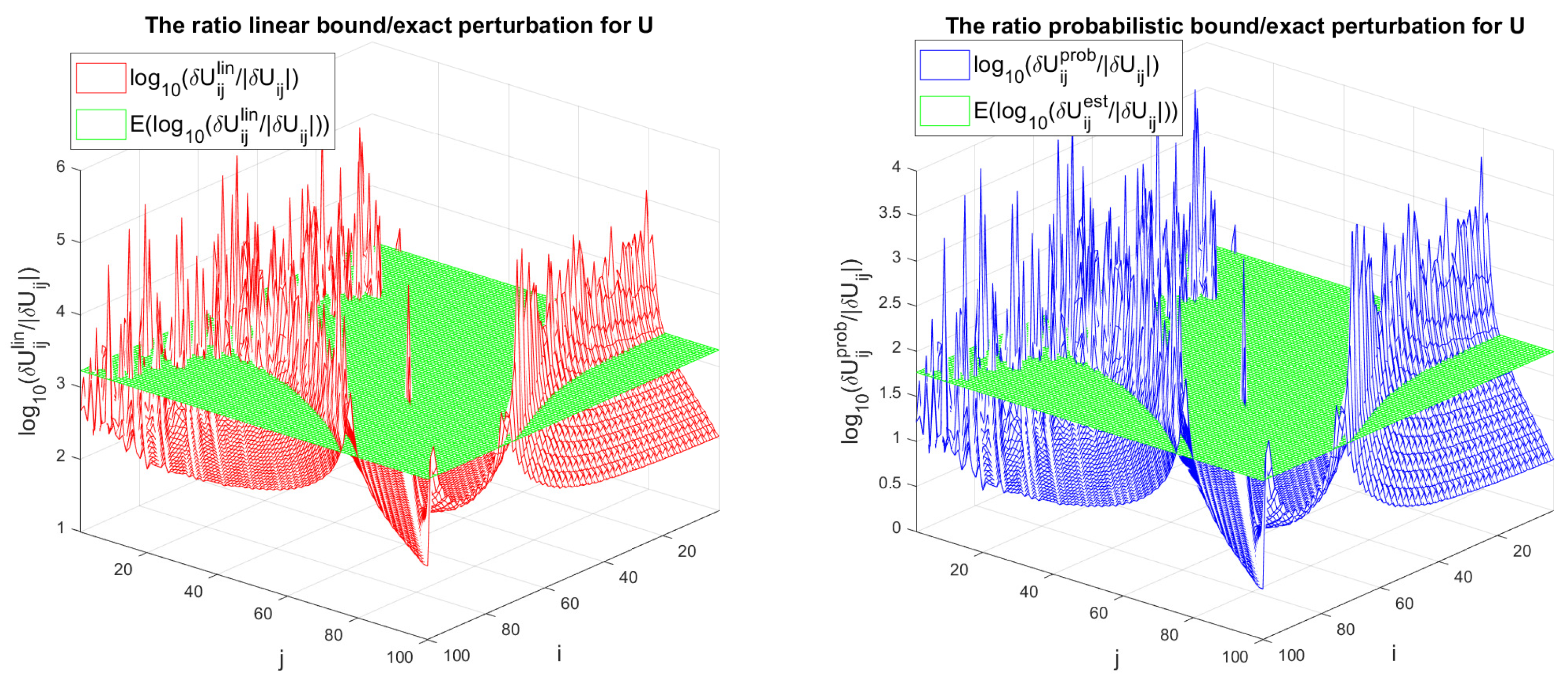
Figure 5.
Angles between the perturbed and unperturbed controllable subspaces and their bounds
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



