
Submitted:
20 November 2024
Posted:
21 November 2024
You are already at the latest version
Abstract
We try to determine the groups of orthogonal matrices that commute with a given simple parameter-dependent symmetric matrix. To this end we resort to a graphical representation of the latter that enables us to find the group of matrices from the symmetry elements of the figure. This strategy works fine for all values of the model parameter λ except for λ = −1. In order to obtain the symmetry point group in this particular case we have to resort to alternative procedures.
Keywords:
group theory
; symmetric matrix
; degeneracy
; character table
1. Introduction
Point group symmetry is a most useful tool for the analysis of many properties of polyatomic molecules [1,2]. It is relevant in the discussion of several features of spectroscopy as well as in the application of quantum mechanics to the electronic structure of polyatomic molecules in their equilibrium geometry. The determination of a suitable point group for a given molecule is based on the identification of the symmetry elements on the graphical representation of the molecule.
In this paper we discuss some Hückel-like symmetric matrices [2] that depend on a parameter and can be represented graphically. The identification of the symmetry elements for some values of the parameter follows the rules commonly used in the analysis of molecules [1,2] but for a particular value of the parameter the graphical representation is misleading. The identification of the point group symmetry for this particular value of the matrix parameter requires an alternative procedure.
In the short Section 2 we outline the main idea of the paper. In Section 3 and Section 4 we discuss examples of three- and fourth- dimensional parameter-dependent symmetric matrices and derive the orthogonal matrices that commute with them. In particular, we determine the symmetry point groups for all values of the model parameter. Finally, in Section 5 we summarize the main results of the paper and draw conclusions.
2. Point Group for a Symmetric Matrix
The purpose of this paper is to find out the group of orthogonal matrices , that commute with a given symmetric matrix of dimension N that depends on a parameter . The symmetric matrix can be represented by a figure with vertices , (for example, a polygon). Instead of the matrices we will show their effect on a vector of vertices as . In order to identify the corresponding point group we obtain the classes and orders of all the group elements [1,2]. In what follows we consider two illustrative examples.
3. Three-Dimensional Matrix
The first example is given by the symmetric matrix
In order to obtain the orthogonal matrices that commute with it, we resort to the graphical representation of shown in Figure 1. When the symmetry operations for the isosceles triangle are
that leads to a group of two matrices that is isomorphic with the point group [1,2]. Since also commutes with , then we can build a larger group of four matrices that is isomorphic with the point group [1,2]. Neither or predict degeneracy.
When the triangle in Figure 1 is equilateral and there is a three-fold rotation axis through the center of the figure that leads to the symmetry operations
that is a matrix representation of the point group . If we add the reflection planes perpendicular to the triangle we have
that is a matrix representation of [1,2]. If we add the matrices we obtain a matrix representation of the point group [1,2]. Both and predict two-fold degeneracy.
The eigenvalues of the matrix
are shown in Figure 2. We appreciate that there is no degeneracy when and that two eigenvalues coalesce at in agreement with the point groups and , respectively, derived above. An exception is the case that exhibits a two-fold degeneracy that may be considered accidental because it cannot be explained by the graphical argument used above. However, this degeneracy is not accidental.
In order to obtain the group of orthogonal matrices that commute with we resort to a sort of brute-force procedure. We choose an arbitrary matrix and try to solve the equations (the zero matrix) and (the identity matrix), where denotes a commutator t stands for transpose. We only need a matrix different from those shown in equation (2) because we can obtain the remaining ones by products of pairs of matrices. In this way we derived a group of matrices that yield the transformations
that is a matrix representation of the group . If we add the matrices we obtain a matrix representation of the group . Both groups predict two-fold degeneracy in agreement with Figure 2.
4. Fourth-Dimensional Matrix
The second example is given by the matrix
that is represented in Figure 3. When (rectangle) we expect the symmetry operations
which are a representation of the point group . If we add the matrices we have the point group .
The most symmetric object appears when (square) that exhibits a four-fold rotation axis perpendicular to the figure and the related operations
lead to a matrix representation of the group [1,2]. If we add the matrices we obtain the group [1,2].
If we consider all the reflection planes perpendicular to the plane of the figure we have
that is a matrix representation of the point group [1,2]. If we add the matrices we obtain a representation of the point group [1,2]. The conclusion is that there should be no degeneracy when and two-fold degeneracy when .
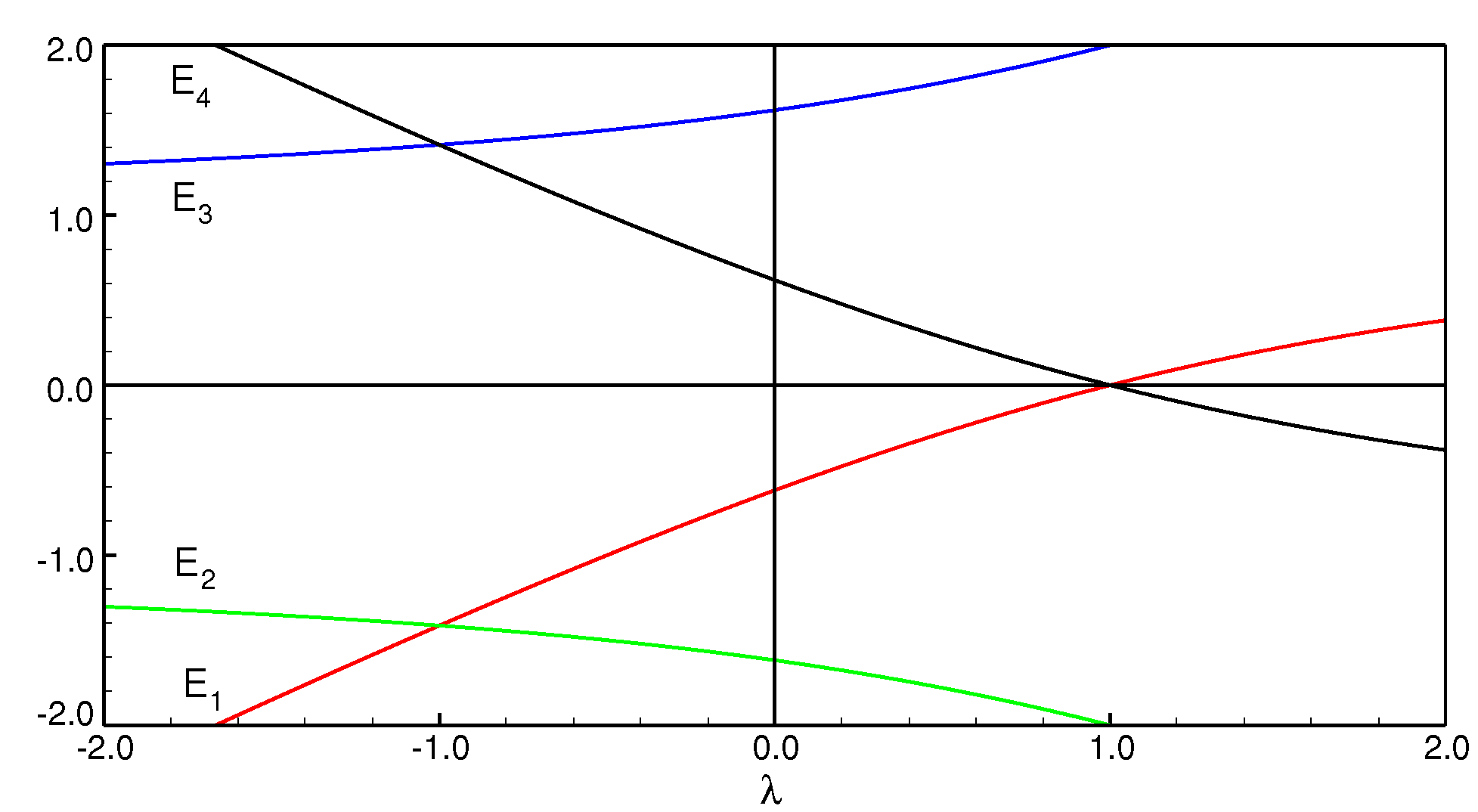
The eigenvalues of the matrix (7)
are shown in Figure 4. The groups derived above account for the non-degeneracy when and the two-fold degeneracy at . However, as in the preceding example our analysis fails for where we find two sets of two-fold degenerate eigenvalues.
In order to obtain the matrices that commute with we followed the brute-force procedure outlined in the preceding section and obtained
that is a matrix representation of the point group [1,2].
In order to obtain a larger group we added the two matrices in equation (8) and carried out all the products thus ending with a set of 16 matrices that produce the following transformations
and that are a representation of the point group (http://symmetry.jacobs-university.de/). Both and account for the two-fold degeneracy at .
5. Conclusions
It is clear that the graphical representation of the matrix is useful for the identification of the symmetry point group for all the values of the model parameter except for that requires a particular treatment. It is not clear to us the reason for this baffling behaviour of the simple Hückel-like matrices.
References
- F. A. Cotton, Chemical Applications of Group Theory, Third ed. (John Wiley & Sons, New York, 1990).
- F. L. Pilar, Elementary Quantum Chemistry (McGraw-Hill, New York, 1968).
Figure 1.
Graphical representation of the matrix (1).
Figure 1.
Graphical representation of the matrix (1).
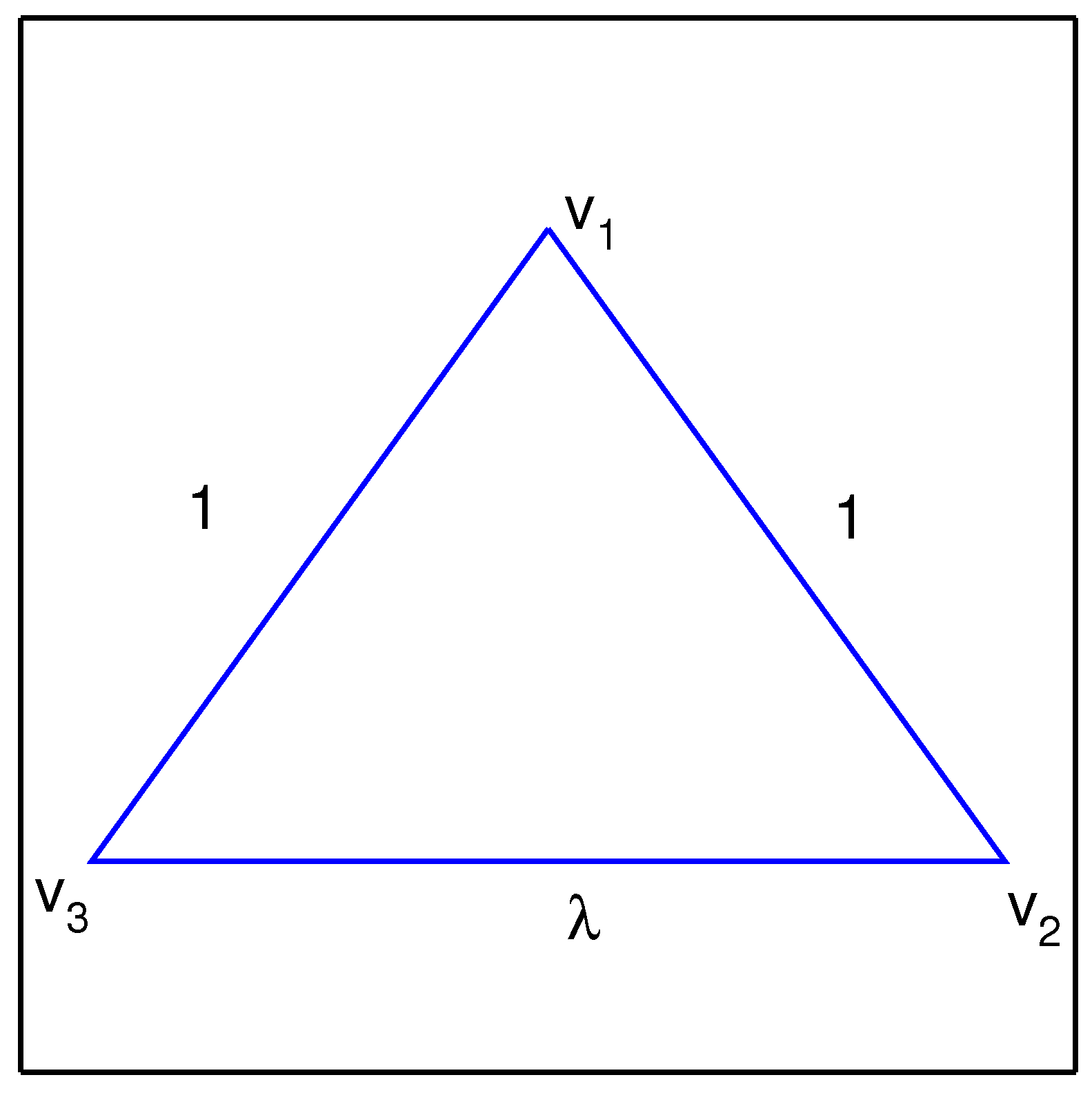
Figure 2.
Eigenvalues of the matrix (1).
Figure 2.
Eigenvalues of the matrix (1).
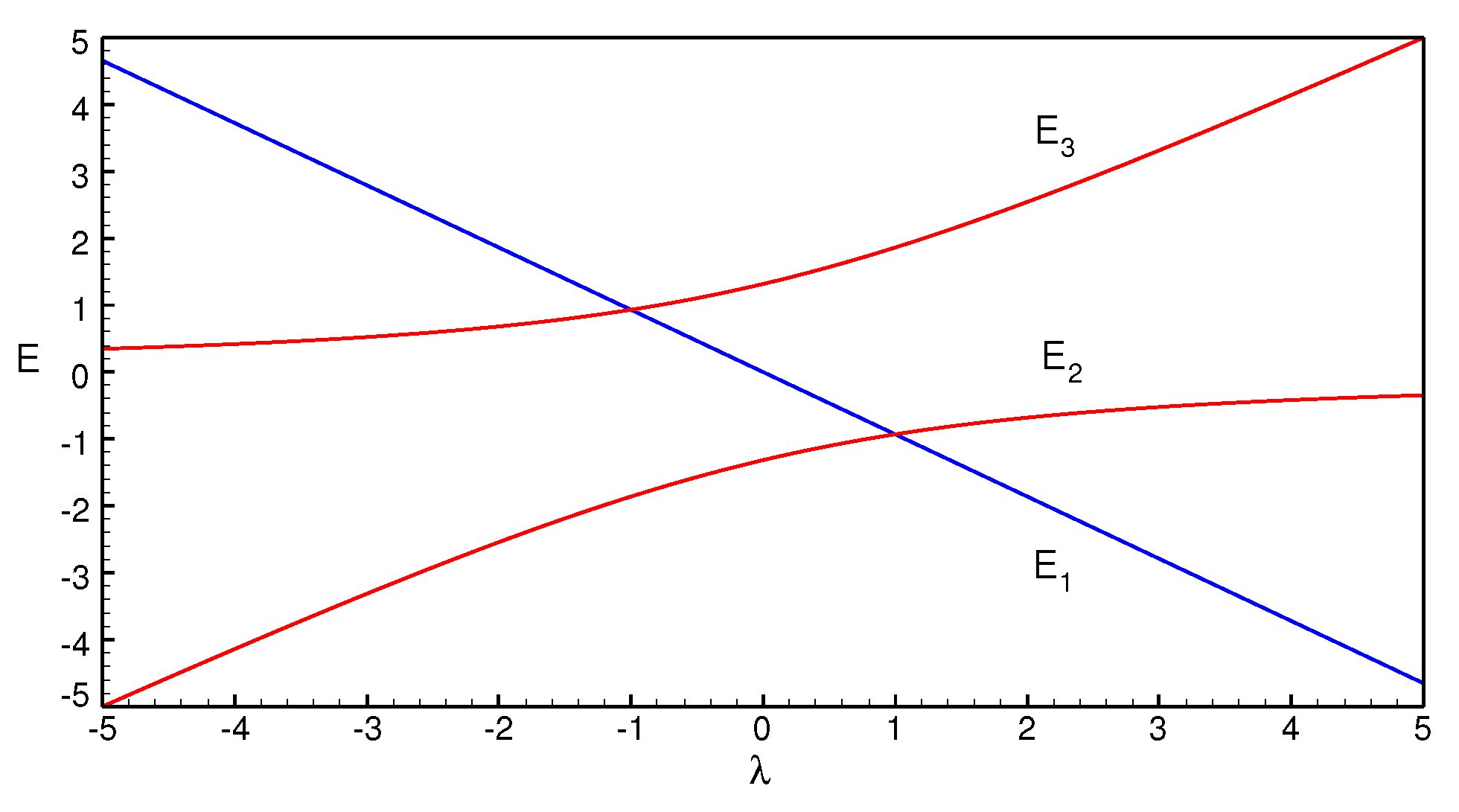
Figure 3.
Graphical representation of the matrix (7).
Figure 3.
Graphical representation of the matrix (7).
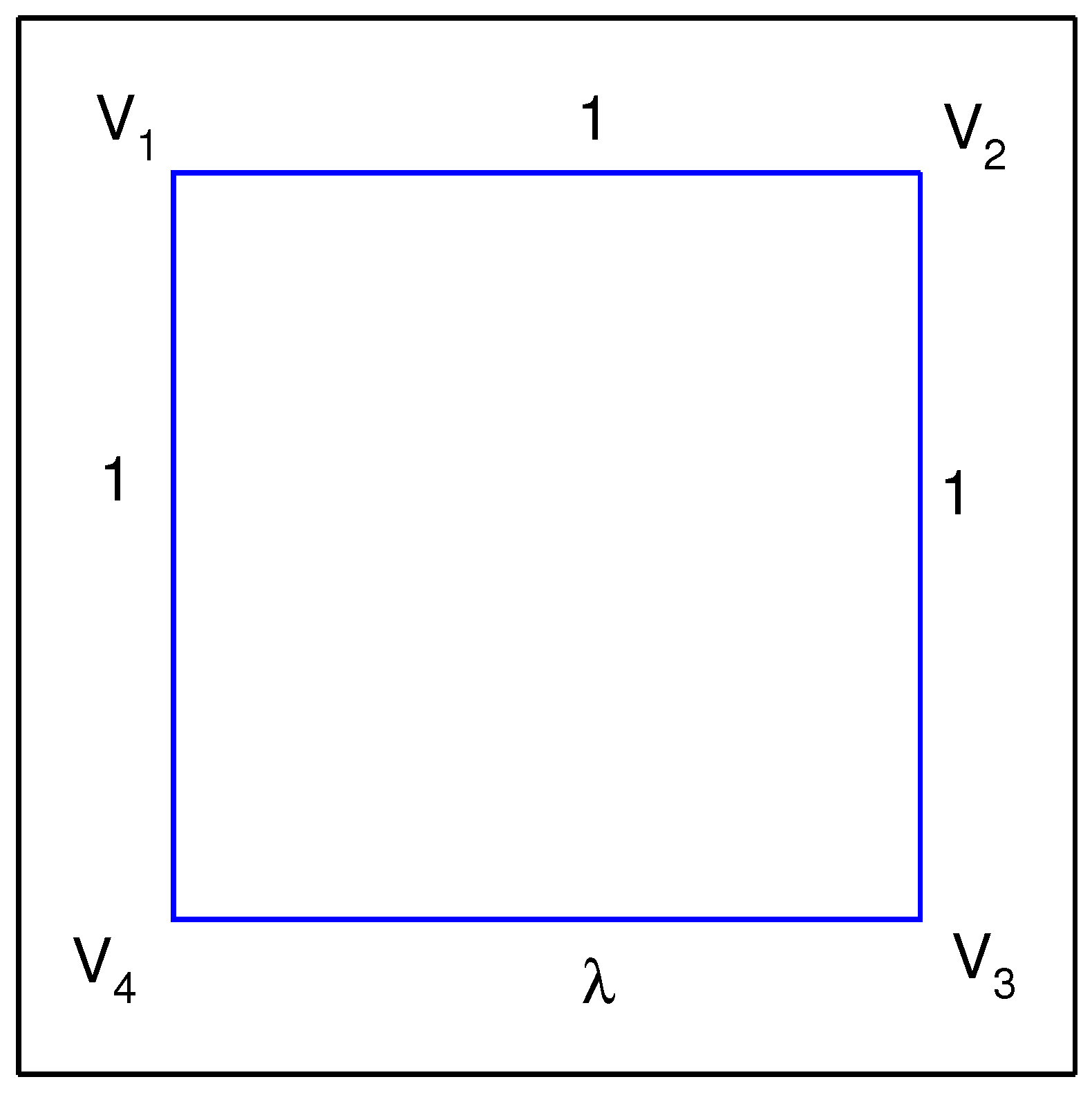
Figure 4.
Eigenvalues of the matrix (7).
Figure 4.
Eigenvalues of the matrix (7).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



