
Submitted:
29 November 2024
Posted:
29 November 2024
You are already at the latest version
Abstract
For Advanced Driver Assistance Systems (ADAS), lots of researchers have been constantly researching various devices that can become the eyes of a vehicle. Currently represented devices are LiDAR, camera, and radar. This paper suggests one of the operation processes to study the radar, which can be used regardless of climate change, weather, day or night. Thus, we propose a simple and easy calibration method for Multi Input Multi Output (MIMO) radar to guarantee performance with the initial calibration parameters. Based on the covariance matrix, the modified signals of all channels improve the performance, reducing unexpected interferences. Therefore, using the proposed coupling matrix, we can reduce the unexpected interference and generate accurately calibrated results. To prove and verify the improvement of our method, the practical experiment is conducted with Frequency Modulated Continuous Wave (FMCW) MIMO radar, mounted on an automotive.
Keywords:
FMCW Radar
; Automotive Radar
; MIMO channels
; Calibration
; Covariance matrix
1. Introduction
In the area of radar, a lot of researchers have studied for various applications to more accurately detect interest targets. Especially, in the field of autonomous driving, radar is one of the most powerful technologies for recognizing various targets. The other technologies, which compete with radar, are cameras and LiDAR. In the ideal case, the camera and LiDAR show strong performance in detecting multiple targets and the surrounding environment. However, the most fatal weakness is that the detection performance rapidly decreases depending on unexpected environmental factors. In other words, since the camera and LiDAR are based on ‘light’, it becomes difficult to distinguish and recognize the interested targets according to snow/rain, night/day, unexpected weather conditions, and various blockages. Due to the characteristics of electromagnetic waves, the radar can have more strong detection performance even under the interference of these unexpected environmental factors. Nevertheless, the target resolution of radar is still insufficient, compared with the performance of the camera and LiDAR. Thus, various technologies have been researched to improve the performance of detecting and classification, using radar.
In this paper, we introduce the improved calibration technique, used to increase the accuracy of radar detection. Not only in the automotive field but also in small radar system field, radar calibration is the essential process to generate the high performance of not only target detection but also target classification for MIMO radar [2,3,4,5,6,7]. In the conventional calibration method for MIMO-type radar, the phase and magnitude of the echo signal are measured and calculated to be fractional form. One of the channels should be chosen for the standard. The first channel is selected as the standard point in a normal MIMO-type radar system. After an accurate calibration process, we can expect the direction & angle of each target in the received signals, due to the difference of each phase and magnitude of MIMO channel [1]. Therefore, using a specific form on standard signal, the calibration process needs to erase and compensate for the unexpected signals, which interfere the estimated angle at each channel. In other words, in certain calibration environmental conditions, all signals are compensated as the same phase and magnitude on the standard channel. Depending on the calibration performance, it can lead to detecting the accurate location and making it easy to classify the specific shape of the interested target.
In the mass production of the small radar industry (automotive, UAV/UAM, cube-SAT, etc.), it is hard to operate the calibration process in every chirp signal because of the limited performance of RF chips. And also, due to the limitation of memory capacity, the calibration parameters, calculated when first manufactured at the factory, are conventionally saved in EEPROM. These parameters are used for compensating all MIMO signals for radar detection until the end of the radar’s lifespan. As close to an ideal environment with low interference, we can compensate for the unexpected phase and magnitude difference between each MIMO channel using the above parameters. However, we cannot always measure the expected reference signal with a stable and low-noise environment. And also, the reference signal can be changed according to various environmental conditions. In a situation with unexpected interference during the operation of radar, it becomes difficult to secure the reliability of the calibration and causes inaccurate results such as errors in target detection and target classification, etc. In recent research, there are various calibration methods to compensate for the unexpected interference [2,3,4,5,6,7], using the saved parameters.
In this paper, comparing other calibration studies, we propose the easy and simple calibration method with a covariance matrix of MIMO channels. The proposed technique can compensate for every signal with initial calibration parameters, even though the received signal is not matched with initial calibration parameters due to unexpected environmental conditions. It leads to the least disturbance and derives accurate calibration results even in adverse conditions outside the radar. In other words, the proposed process diversifies the matching point of calibration for the MIMO radar, based on the coupling matrix method.
2. Improved Calibration Method
For the proposed process, we need to introduce the conventional calibration method. In this paper, we utilize the MIMO FMCW radar, which is designed with 4 channels for receiving (Rx) and 3 channels for transmitting (Tx), respectively, as shown in Figure 1. Total 12 channels can be used to detect the interested target with own signal processing. In addition, 12 channels are commonly used in the radar mass production of the automotive market.
2.1. Conventional Calibration Method for MIMO Radar
In an un-echoic chamber, we can generate the reference signals for the calibration method and assume that the reference signal is measured with the corner reflector, which is located at 0-degree (calibration point) of radar. The reason is that the main beam of the antenna is assumed to be in the ideal center. According to the beam pattern of an antenna, the location of the calibration point can be changed. From the received signals at the 0-degree point, we can calculate the calibration parameters and operate the accurate compensation process of each channel. Based on the calibration data, every transmitted signal in MIMO radar is enable to estimate the accurate location of each target in the received signals. It leads to increasing the overall performance of MIMO radar. However, when we receive the reference signal in unexpected conditions, it is hard to analyze the received signals as accurate targets. Thus, it is an important task before radar signal processing. The conventional calibration procedure for MIMO channels is as follows:
1) Measurement for ideal signals: measuring each signal of each channel in an un-echoic chamber.
2) Averaging: applying the averaging technique with the stacked all data.
3) Estimating fractional term: estimating the fractional term of magnitude and phase to compensate for raw data.
4) Extracting final calibration function: Define the final calibration function of each channel with the estimated magnitude and phase results.
Based on the measured signal in an un-echoic chamber, we arrange all data of each channel according to the available angle of MIMO radar. The reflected signal can be analyzed with a virtual array MIMO system. Nth Tx and Mth Rx antennas generate a total channels and it can be the same as the extended Rx multiple channels. Therefore, we can define the mathematical signal model for the received signals with a range-compressed signal [1] (in FMCW), as shown below:
m = 1, 2, 3, , k-1, k (channel number)
where, subscript r means the received signal, a indicates the amplitude of the received signal, W indicates the window function, f0 is the center frequency of the chirp pulse signal and c0 is the speed of light. As described above equation, it is necessary to select one channel, which can be used for a reference among the signals received in all channels. Based on the signal information of the selected reference channel, we start to calculate the calibration parameters. The calibration process aims to have the same phase and magnitude of all signals in MIMO channels when the radar receives the reflected signals from the same target. Before the calibration process, even if a signal is received from the same target, the signals of each channel can have a different phase and magnitude depending on unexpected conditions, such as MIMO antenna position error, circuit length error, etc. Thus, these phase and magnitude errors cause the deterioration of the target resolution even though the signal is reflected and received from the same target. In general, the conventional calibration sets the 1st channel for standard reference with the phase and magnitude terms. The phase and magnitude of each channel are normalized to be shown as the first channel. Equation (2) and (3) indicate the compensation factor, arranged as 1st channel signal.
In all channels of MIMO, equation (2) represents the compensation matrix matching with the phase of the 1st channel, and equation (3) represents the compensation matrix matching with the magnitude of the 1st channel. To increase the accuracy of the above compensation matrices, several chirp pulses are collected from FMCW Rx signals, and the average values thereof are defined as expected calibration factors.
where, m is channel number, k is the maximum channel number (), l is the overall number of accumulated signals for averaging. The calibration factors of the phase and magnitude, estimated as the fractional form, can be synthesized and extracted in the form of a complex signal. Therefore, the following equation is finally defined as a general calibration parameter.
By using the extracted calibration parameter, we can receive and calculate the signals of all channels with the expected phase and magnitude when detecting the interested target in MIMO radar.
In order to not only match the target into the expected location but also secure the expected resolution of the target, the calibration process is essential for MIMO channel radar. However, as mentioned before, when the intensity of the unexpected interference increases, it is hard to expect the desired result with the initial calibration parameters, measured in an ideal environment. Therefore, this paper introduces a method of estimating calibration parameters with a simplified process, using a coupling matrix, rather than adding a complex process to derive a more accurate calibration factor.
2.2. Calibration Method with Proposed Coupling Matrix
As mentioned in the previous Section II-A, we try to improve the conventional calibration process based on the initial calibration parameters. It has the advantage of being applicable to existing processes. In other words, it is simple to upgrade the previous calibration method with low cost and low complexity. Based on the calibration parameters estimated in the existing method, a coupling matrix for every chirp can be derived, and we can generate more accurate calibration parameters. Thus, we introduce the overall proposed algorithm, as shown in Figure 2 (b):
1) Measurement for ideal signals: measuring each signal of each channel in an un-echoic chamber.
2) Averaging: applying the averaging technique with the stacked all data.
3) Estimating fractional term: estimating the fractional term of magnitude and phase to compensate for raw data.
4) Extracting final calibration function: Define the final calibration function of each channel with the estimated magnitude and phase results.
5) Applying the coupling matrix with the loop-back process: Extracting the coupling matrix from the conventional calibration model and finding an adequate final model.
As the unexpected signal becomes stronger, the accuracy of calibration parameters can be decreased. Figure 1 illustrates various interference in MIMO radar. In the case of high interference, the standard signal (1st channel) can be contaminated before proceeding with the existing calibration process. It causes unexpected errors in all radar signals. Therefore, to increase the accuracy of calibration results, it is important how modify the calibration parameters according to the various conditions. For example, the radar detection process generates the wrong Direction of Angle (DOA) of each target because the initial signal, calibrated by the inaccurate reference, indicates the wrong direction. Moreover, in Synthetic Aperture Radar (SAR) processing, the interested targets can be blurred and focused on an unwanted area. It leads to reducing the overall quality of the final image. Therefore, in this chapter, we use the covariance matrix and re-calibrated process with a simple and easy method considering the practical situation. The proposed covariance matrix between the received signal and the previously calibrated signal calculates the modified calibration function. And we define its meaning. The proposed matrix is estimated from each mutual signal between each channel. In the previous section, the conventional calibrated signal can be defined as follows:
Based on the above equation, all signals of the MIMO channel are unified as the first channel, considering the phase and magnitude difference. In the existing calibration method, the desired final signal is extracted by multiplying with the equation (5). For explaining the method, equation (5) is defined as the matrix ‘C’. The signal model, defined in (1), shows the standard form, which indicates the received signal model in each channel. The standard form does not consider the interference, using a covariance matrix between channels. Therefore, we can introduce a complex-valued coupling matrix (NM is the total channel number and equal to ‘m’ in Eq. (6)) with angle independent and linear model:
Based on the initial calibration parameters, the covariance matrix model can be re-generated for the received MIMO signals, received every time. To analyze the proposed coupling matrix, we use the originally defined signal, which is calibrated into the standard channel. As shown below, the calibrated signals detect the target (CR, Corner Reflector) with the same phase and amplitude in the initial case:
When the calibrated signal is interfered with by an increase of the unexpected signals, the direction points of each channel also deviate in unexpected directions. To accurately analyze this phenomenon, we first apply the covariance matrix to our proposed process. The covariance matrix generates a square matrix and informs the covariance values between the pairs of each element. Using the calculated matrix, we can find the related tendency between each element which can be seen as the random variance. And also, it indicates the dispersion value and is easy to analyze more accurately. In other words, it helps to understand the interaction parameters between each channel. Therefore, for the first step, the covariance matrix is calculated with the received signal and initial calibrated parameters, as shown in equation (9). It is composed of a mm square matrix and shows the correlation of each channel that has been compensated by the initial values. In the next step, the initial calibrated signal can be analyzed with vector matching and it leads to concentrating the interest on the expected signals even in the interference situation. The accuracy of calibration can be further improved by applying the vector product between the proposed covariance matrix and the initial calibrated signals of all channels. The vector product amplifies two signals with the same tendency, and simultaneously, weakens two signals, which have a different tendency, compared to the previous value. Based on the initial calibration parameters, the calculation results of the covariance matrix and the received signals are as follows:
Based on the above results, it can be confirmed that the calculated matrix is constructed as the form, which is combined with the compensation values for each channel and the initial calibration signals. Moreover, it can be simplified as shown below:
where, Bn is the amplitude and are the amplitude and the phase of the received signal, respectively. indicates the calibrated results by the proposed technique. In equation (11), the phases that affect each channel are grouped into a common variable, and only the existing initial calibration phase remains. As shown in Figure 3, in this proposed method, the modified calibration point can be changed to the same form as the initial calibration point. The final magnitude must be cubed because the signal is multiplied three times by our proposed calculation. For each channel, the magnitude is amplified to a calibrated signal. And the magnitude deviation of each channel signal is minimized.
That is, when calibrating with the standard channel at a specific angle, it means the reference point can be changed slightly depending on the environment in which signals are transmitted and received. As an aspect of the calibrated phase, it indicates the received signals of all channels can be arranged in the calibration standard point (0-degree). The proposed technique re-generates calibration parameters to improve detection performance, using the covariance matrix of the received signals and the initial calibration parameters, stored in the memory. Thus, our technique can reduce the effect of the current unexpected conditions in the signal processing of radar detection. Through the proposed method, MIMO radars can use existing calibration values without having to calibrate for every transmitted pulse. It is simple and useful for solving environmental conditions because we cannot expect the phase direction of the interference. As mentioned in the previous section, the only saved calibration parameters cannot be adequate to compensate for each signal of all channels, according to various environmental conditions. The results of the proposed technique are better than those of conventional calibration signal processing. In the next section, to verify the performance of the proposed method, we introduce the calibration experiment and show the improved results.
3. Experiment and Results
To verify the proposed calibration method, we designed the FMCW MIMO radar system, which is conventionally used for the front radar and corner radar of automobiles. The experiment was done with a corner reflector in an anechoic chamber. And also, we operate the designed radar, combined with a 360-degree rotator to monitor the signals in all angle directions. The specifications of the FMCW MIMO radar system are introduced in Table 1.
The radar for the test is mounted on the stable motor, which can rotate from -180o to 180o. In this experiment, we rotate the radar from -70o to 70o according to two types of beam patterns. The first type has one peak point, and the second type has two peak points for the main beam, respectively. Figure 4 shows the illustration of the experiment environment condition for verifying the calibration performance. The received data in 12 MIMO channels are processed through the conventional and the proposed calibration algorithms of Figure 2 (a) and (b), respectively. Based on experiment conditions in Figure 4, Figure 5 shows the results, which indicate the phase difference along the antenna direction from -70o to 70o. By using the phase-monopulse method [8], the phase error of the conventional correction method. It means that the probability of information error can be reduced between channels for targets detected by all channels.
MIMO channel should appear linearly depending on the measurement angle. As we can be seen in Figure 5 (a), the existing calibration method shows the phase errors. On the other hand, as shown in Figure 5 (b), the proposed method shows results in which the error was properly compensated. Moreover, we measure the beam pattern of each channel and the received magnitude and phase of signals at each angle. we can find the improvement of the processed results in Figure 6 & Figure 7. In Figure 6 (a), it shows the noise level from -70o to 70o of the antenna when the target is located at the around edge in the field of view (FOV). In the measured range of angle, we can find the noise level is decreased than the conventional method. Because the gain at the around edge of the antenna can be low, the detection probability of the expected target can be increased. Decreasing the unexpected noise interference is one of the important issues. In Figure 6 (b), when the target is located at the center of the FOV of the antenna, the side lobe level can be reduced by 2 dB more than the conventional method. The power decrease of the second lobe is important to detect the expected target because some of the side lobe, which has a high magnitude enough to interfere with the main beam, can be detected as the ghost target. Especially, as shown in Figure 7, there are the results of analyzing the two types of antenna beam patterns. The channel difference of each pattern is noticeably reduced compared to the conventional correction method. It means that the probability of information error can be reduced between channels for targets detected by all channels.
In the summary, the Table 2 defines the performance of each method, respectively. The proposed method has a lower noise level not only in the edge of the antenna but also in the center of the antenna. Furthermore, we can reduce the difference between each channel, comparing the conventional method. The proposed method is simple and easy to handle the calibration process and we can reduce the signal processing complexity for MIMO radar.
4. Conclusion
In this paper, we propose an easy and simple method how to calibrate the received signals in MIMO channel radar. In the small radar (automotive, UAV/UAM, cube-SAT, etc.) industry using a limited memory and an RF chip with limited performance, the proposed calibration method can be important. In a situation where calibration values cannot be extracted in real-time, this method is one of the ideas that can improve detection performance. Based on the proposed signal processing, it can generate an improved calibration result than the conventional method and it can be applied for real-time processing. To introduce the proposed method, we extract the fractional terms of each channel from the received data and apply them to the covariance matrix with the loop-back process. Thus, it is easy to handle the calibration process and generates only a slight difference in the magnitude and phase of each signal in MIMO channels. In addition, our proposed method secures low complexity in terms of computational amount and accurate calibration results with a low noise level. Furthermore, we can verify our method using a real experiment with the main coverage of the antenna. In future work, the proposed calibration method can be applied to the outdoor automobile platform because it has low complexity and improved performance compared to the conventional method. It can be operated for real-time processing in the autonomous driving assistant system (ADAS).
References
- David M. Pozar, Microwave Engineering 4th Edition. John Wiley & Sons Inc., 2012.
- C. M. Schmid, C. Pfeffer, R. Feger and A. Stelzer, „An FMCW MIMO radar calibration and mutual coupling compensation approach,” 2013 European Radar Conference, 2013, pp. 13-16.
- B. T. Arnold and M. A. Jensen, „The Effect of Antenna Mutual Coupling on MIMO Radar System Performance,” in IEEE Transactions on Antennas and Propagation, vol. 67, no. 3, pp. 1410-1416, March 2019. [CrossRef]
- C. Vasanelli, R. Batra, A. D. Serio, F. Boegelsack and C. Waldschmidt, „Assessment of a Millimeter-Wave Antenna System for MIMO Radar Applications,” in IEEE Antennas and Wireless Propagation Letters, vol. 16, pp. 1261-1264, 2017. [CrossRef]
- F. Belfiori, W. van Rossum and P. Hoogeboom, „Array calibration technique for a coherent MIMO radar,” 2012 13th International Radar Symposium, 2012, pp. 122-125.
- Y. Liu, X. Xu and G. Xu, „MIMO Radar Calibration and Imagery for Near-Field Scattering Diagnosis,” in IEEE Transactions on Aerospace and Electronic Systems, vol. 54, no. 1, pp. 442-452, Feb. 2018. [CrossRef]
- X. Tian, Q. Guo, Z. Wang, T. Chang and H. -L. Cui, „Pragmatic Approach to Phase Self-Calibration for Planar Array Millimeter-Wave MIMO Imaging,” in IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1-11, 2021.
- S. Gogineni and A. Nehorai, „Monopulse MIMO Radar for Target Tracking,” in IEEE Transactions on Aerospace and Electronic Systems, vol. 47, no. 1, pp. 755-768, January 2011.
Figure 1.
Schematic block diagram of MIMO radar system: 3 RX channels and 4 RX Channels.
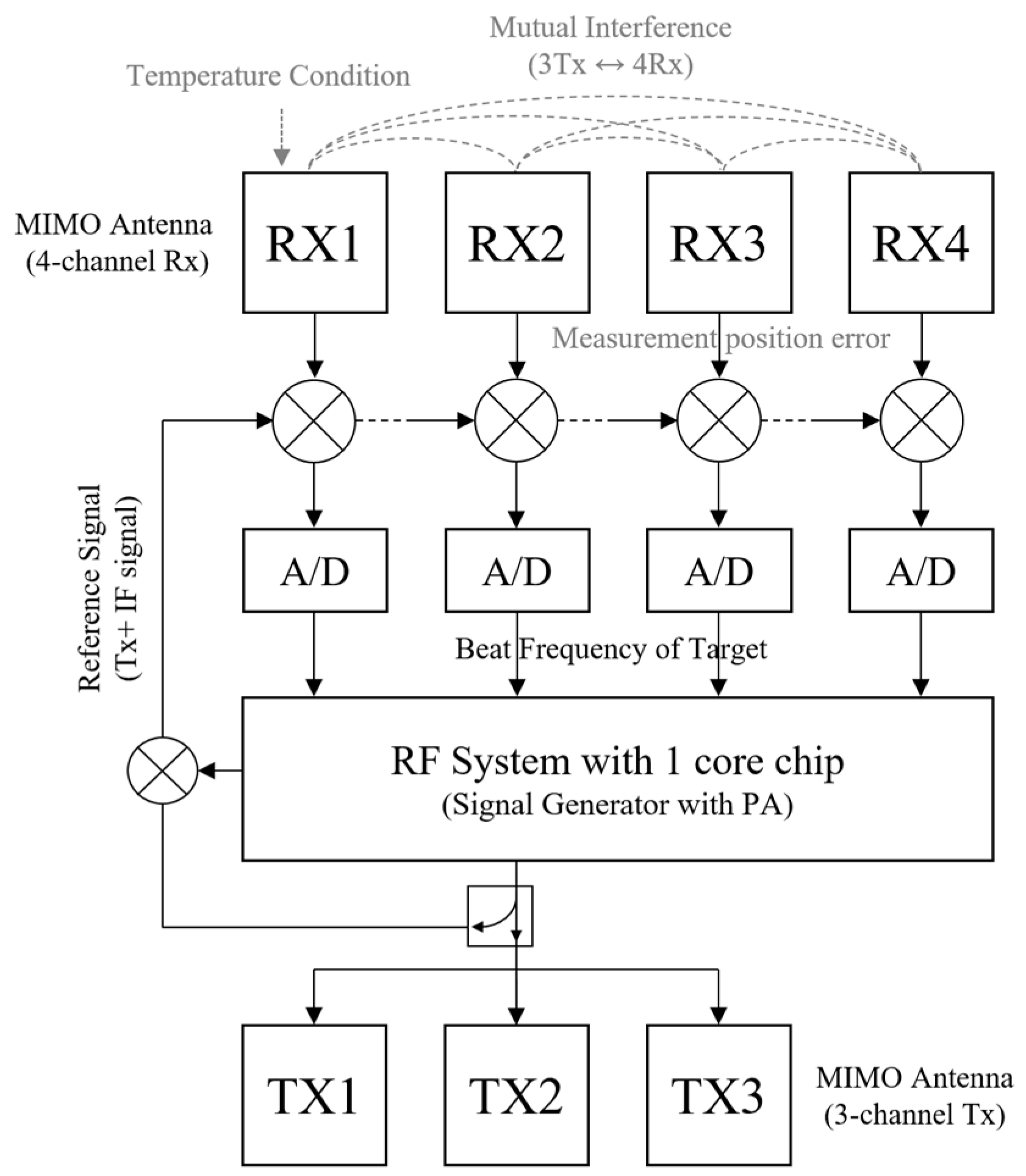
Figure 2.
The Schematic block diagram of (a) the conventional calibration process and (b) the proposed calibration process.
Figure 2.
The Schematic block diagram of (a) the conventional calibration process and (b) the proposed calibration process.
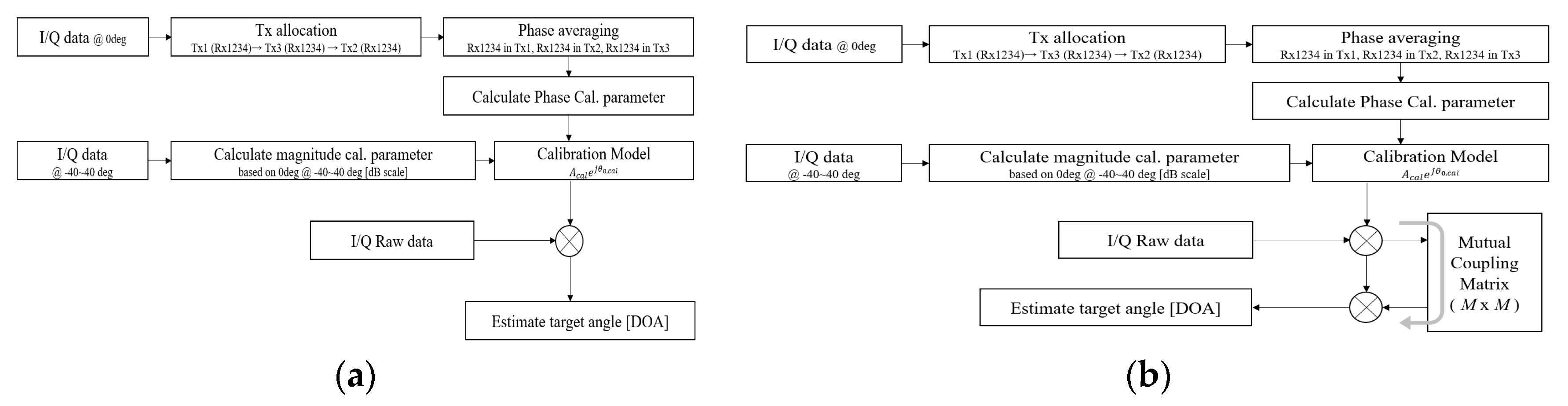
Figure 3.
Illustration of the re-located calibration point by the proposed coupling matrix.
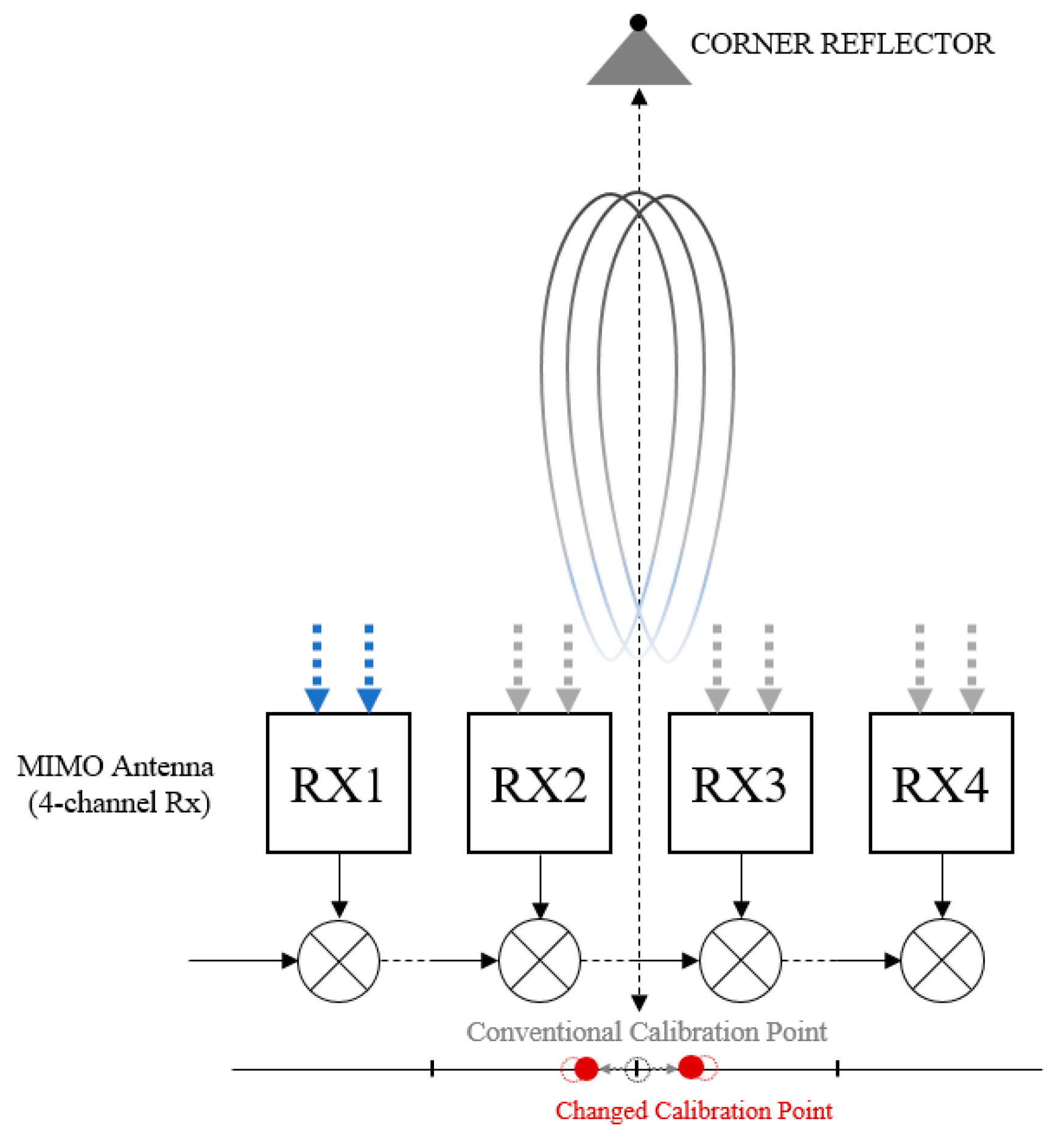
Figure 4.
The performance experiment condition for the calibration method in anechoic chamber.
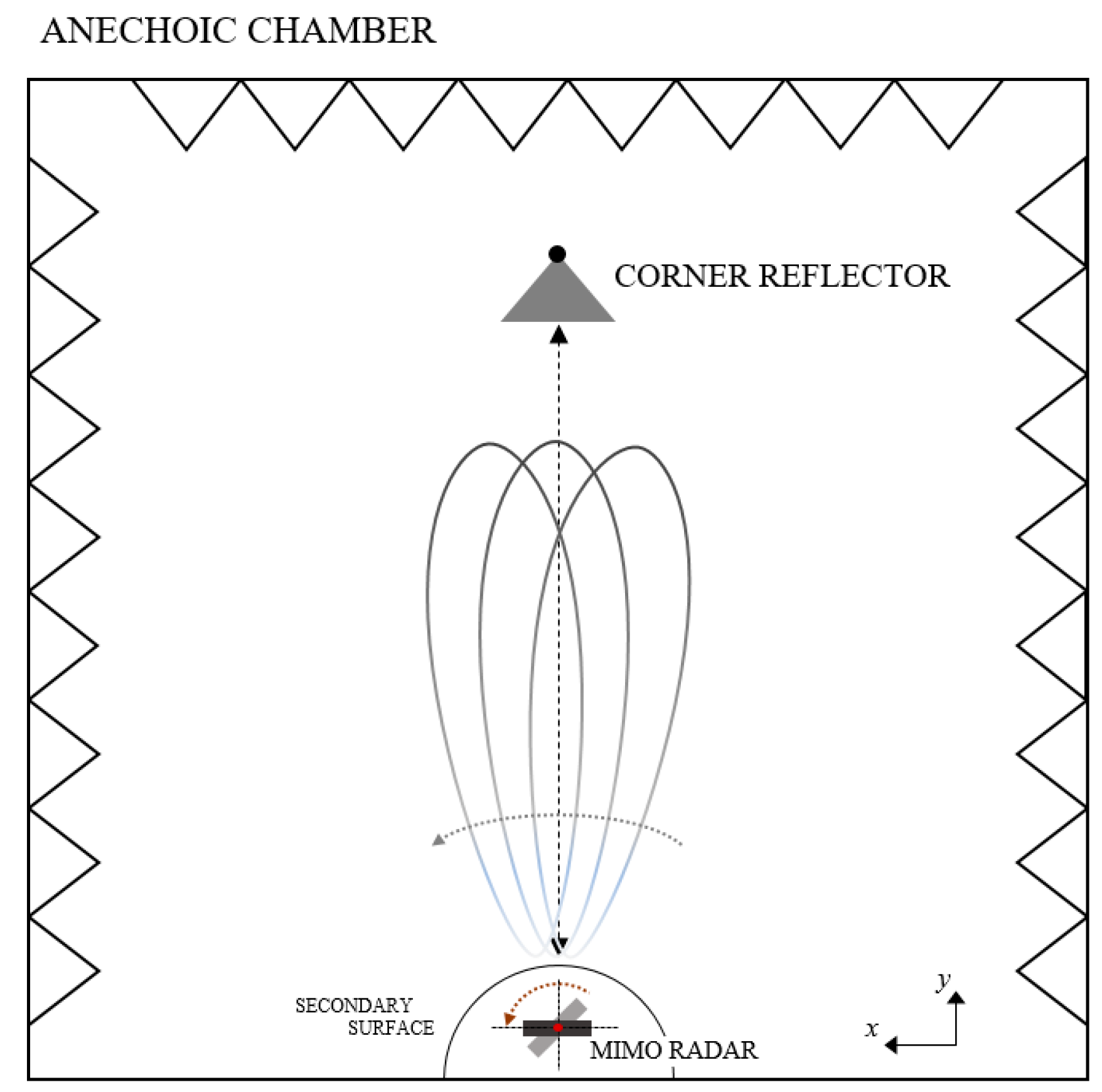
Figure 5.
Estimated phase curve, based on (a) the conventional calibration method and (b) the proposed calibration method.
Figure 5.
Estimated phase curve, based on (a) the conventional calibration method and (b) the proposed calibration method.
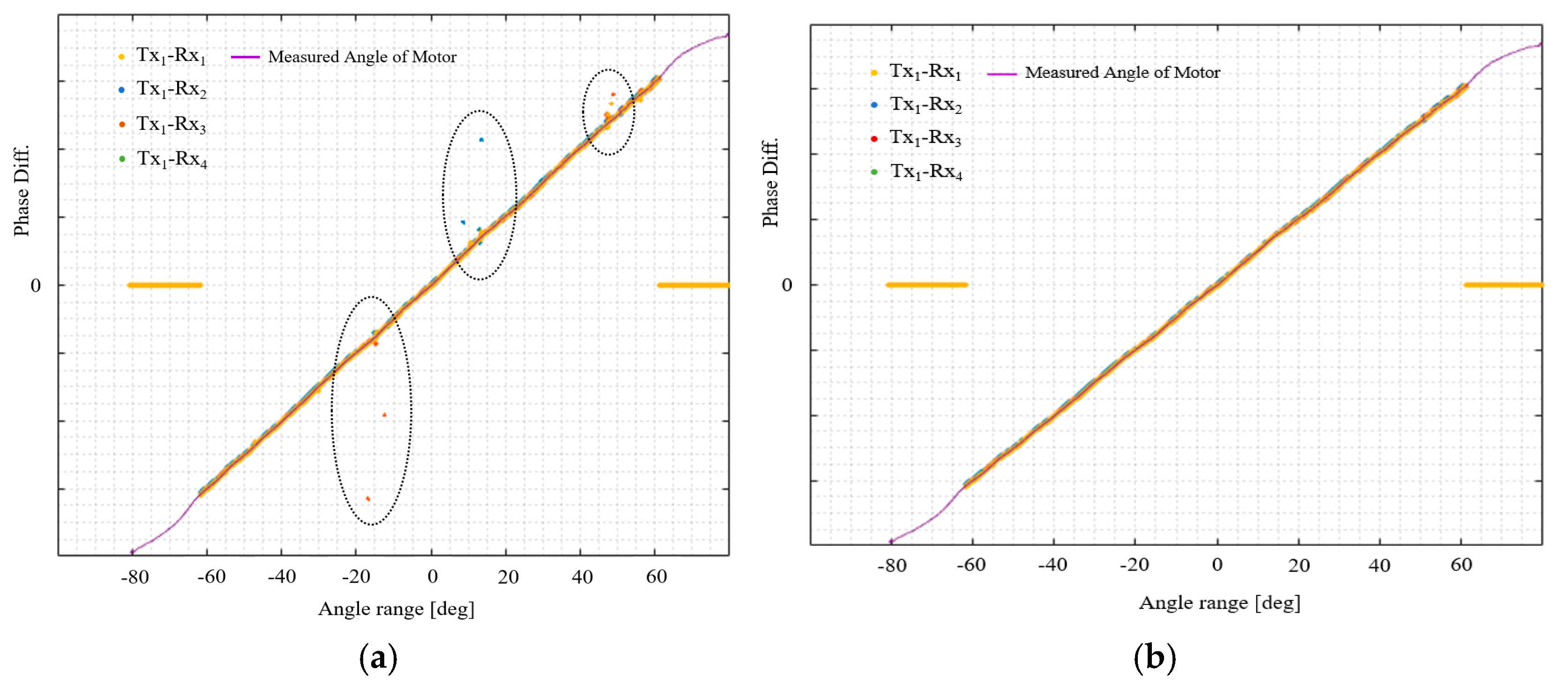
Figure 6.
The received power from the target, which is at (a) the corner of FOV and (b) the center of FOV.
Figure 6.
The received power from the target, which is at (a) the corner of FOV and (b) the center of FOV.
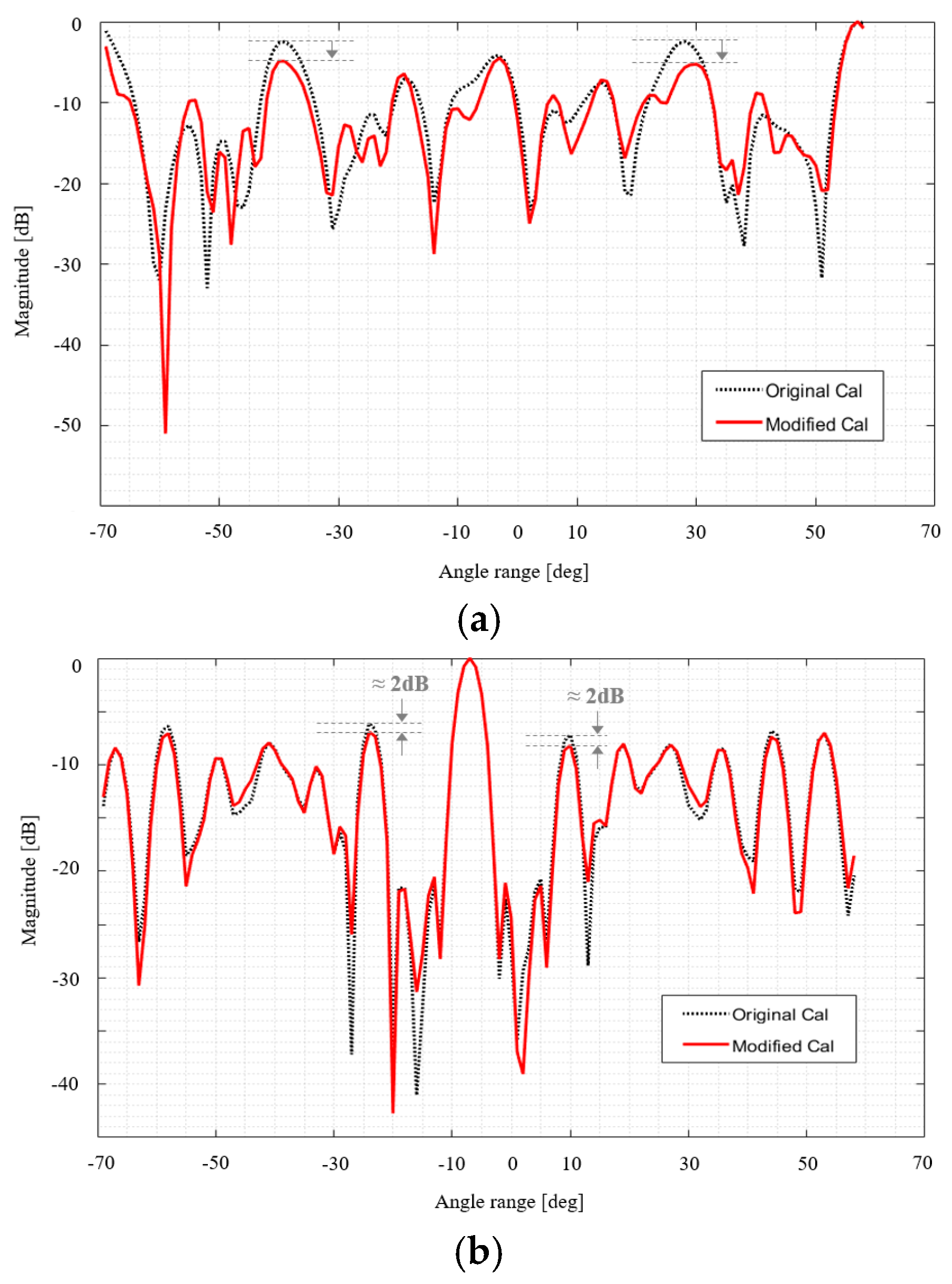
Figure 7.
Beam patterns of each channel in MIMO System, applied by (a) the conventional model and (b) the proposed model.
Figure 7.
Beam patterns of each channel in MIMO System, applied by (a) the conventional model and (b) the proposed model.
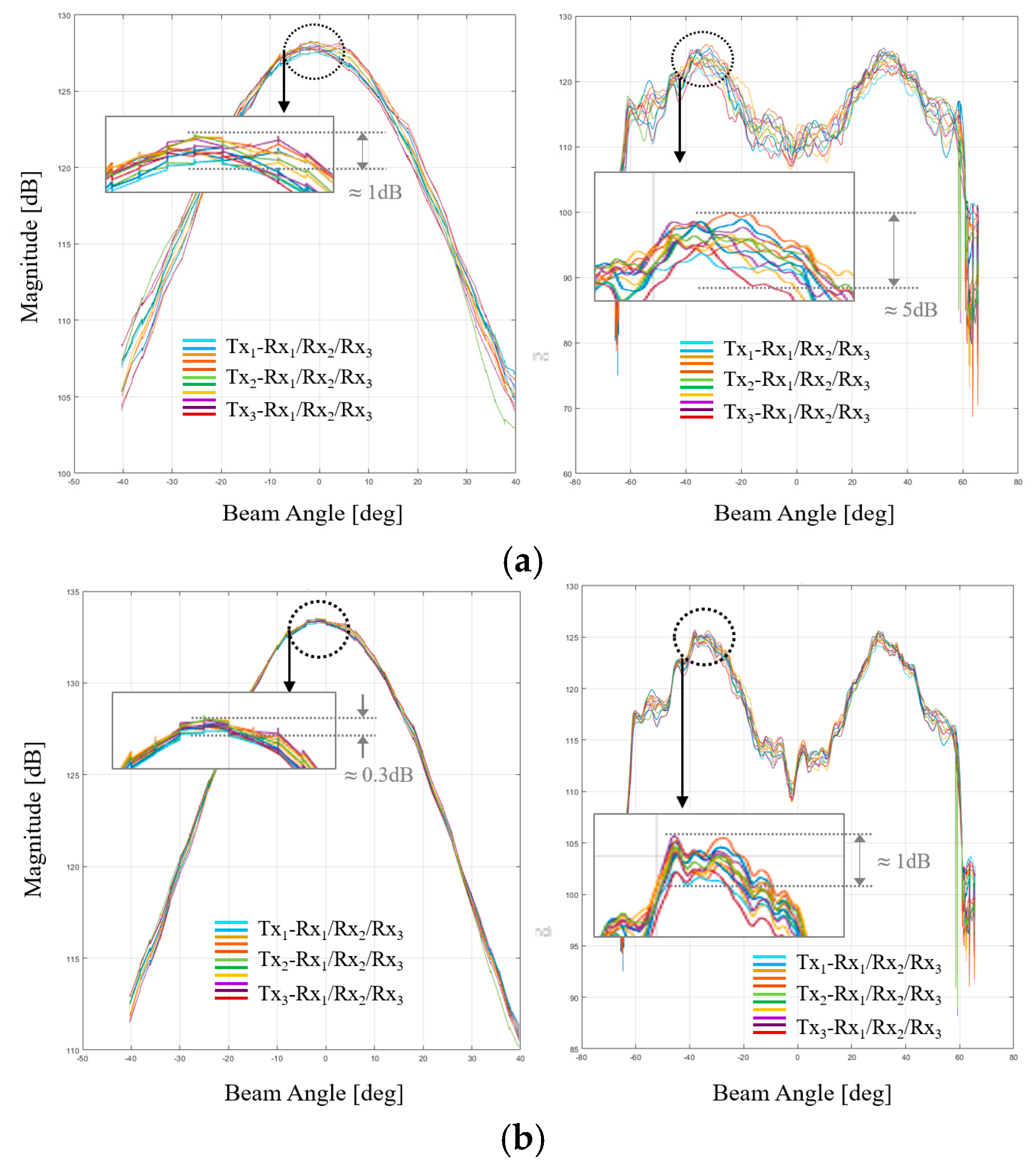

Table 1.
FMCW MIMO radar system specification.
| System Parameter | Value |
| Center Frequency | 77GHz |
| Chirp signal Bandwidth | 200/300MHz |
| PRF | - Hz |
| Chirp Duration | - ms |
| Sampling rate | - Mbps |
| Total Channel | 3 Tx / 4 Rx (12 channels) |
Table 2.
Processing performance comparison.
| Noise level | Channel Difference | Processing Complexity | |
| The conventional method | - | High | Low |
| The proposed method | Lower | Low | Low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



